
ターゲット識別装置およびターゲット移動予測方法
【課題】船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置を提供する。
【解決手段】自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、ターゲットの位置、対地速度、対地方位に基づいて、自己とターゲットとの最接近距離および最接近時間を算出し、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲット方向に書き換えて、前記最接近距離および最接近時間を算出する演算部とを備える。
【解決手段】自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、ターゲットの位置、対地速度、対地方位に基づいて、自己とターゲットとの最接近距離および最接近時間を算出し、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲット方向に書き換えて、前記最接近距離および最接近時間を算出する演算部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自装置とターゲットとの最接近距離、最接近時間を算出するターゲット識別装置およびターゲット移動予測方法に関する。
【背景技術】
【0002】
船舶相互の衝突予防、船舶の動静を把握した管制の容易化のために、船舶自動識別装置(AIS(Automatic Identification System)装置)が実用化されている。AIS装置は、GPS測位装置等を用いて自船位置や対地速度(SOG)、対地方位(COG)を測定するとともに、VHF帯の電波を用いて、他船から発信される識別情報(MMSIコード)、船名、位置、SOG、COG、目的地などを含むAIS情報を受信する機能を備えている。
【0003】
小型船舶用のAIS装置では、GPSによる測位結果履歴によって得られる差分ベクトルを用いて自船のSOG,COGを算出している(例えば特許文献1参照)。
【0004】
また、取得した自船情報、他船情報に基づき、他船が自船に最も接近する距離である最接近距離CPA、他船が自船に最も接近するまでの時間である最接近時刻TCPAを算出し、これらが所定値を下回る場合には、ユーザに注意を喚起する必要があるとしてアラームを発するものもある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−65392号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
GPS測位は、数メートル〜十数メートルの測位誤差を含んでいる。船舶がある程度以上の速度で航行している場合には、長い差分ベクトルが得られるため測位誤差の影響が小さいが、船舶が停止または低速で航行しているときは、得られる差分ベクトルが短いため測位誤差の影響が大きくなり、SOG,COGがランダムに変動する。たとえば、船舶が停止状態の場合、GPS衛星の配置やGPSエンジンが演算に使用するGPS衛星によっては、COGは0〜359.9の全方位、SOGは0〜3kt程度までの範囲でランダムに変動する。
【0007】
このため、停船時や低速航行時に出力されるCPA、TCPAは信頼度の低いものとなってしまい、接近や衝突の危険性を正しくユーザに告知することができないという問題点があった。また、CPA、TCPAがアラームのしきい値を跨いでランダムに変動する場合があり、このような場合には、一度止めたアラームが直後に再度なり始め、アラームの鳴動/停止が繰り返されるなどの問題点があった。
【0008】
この発明は、船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置およびターゲット移動予測方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1の発明は、移動体に搭載されるターゲット識別装置であって、自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する演算部と、を備え、前記演算部は、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出することを特徴とする。
【0010】
請求項2の発明は、前記自己情報取得部は、GPSによって測位された自己の位置に基づいて前記対地速度、対地方位を算出することを特徴とする。
【0011】
請求項3の発明は、前記演算部は、前記ターゲットの対地速度が所定の第2低速判定値以下のとき、ターゲットの対地方位を自己方向に書き換えて、前記最接近距離および最接近時間を算出することを特徴とする。
【0012】
請求項4の発明は、算出された最接近距離および最接近時間が、所定の警告条件を満たしたとき警報を発する警報手段をさらに備えたことを特徴とする。
【0013】
請求項5の発明は、移動体において、他の移動体であるターゲットの移動を予測するターゲット移動予測方法であって、自己の位置、対地速度、対地方位を取得する手順、ターゲットの位置、対地速度、対地方位を取得する手順、自己の対地速度と所定の低速判定値とを比較する手順、自己の対地速度が前記低速判定値よりも大きいとき、自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する手順、自己の対地速度が前記低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出する手順、を有することを特徴とする。
【発明の効果】
【0014】
この発明によれば、船舶等の移動体が停止または低速で移動している場合でも、信頼度の高い接近判定が可能になる。
【図面の簡単な説明】
【0015】
【図1】この発明の実施形態であるAIS装置の正面パネルの外観図である。
【図2】同AIS装置の内部構造のブロック図である。
【図3】同AIS装置のディスプレイに表示される各種画面を示す図である。
【図4】同AIS装置のCPA,TCPAの算出方式を説明する図である。
【図5】同AIS装置のDSCキーがオンされたときの動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
図面を参照してこの発明の実施形態である船舶自動識別装置(AIS装置)について説明する。図1はAIS装置の外観図、図2はAIS装置のブロック図である。
【0017】
AIS装置1は、自船のAIS情報を送信するとともに、他船のAIS情報を受信して表示する装置である。ここで、AIS情報は、船名、MMSIコード、現在位置、対地速度(SOG)、対地方位(COG)、仕向地、積載物等のデータからなる情報である。また、AIS装置1は、自船に極めて接近しつつある他船が存在する場合に、アラーム音およびアラーム表示からなるアラーム動作を実行してユーザに警告する。
【0018】
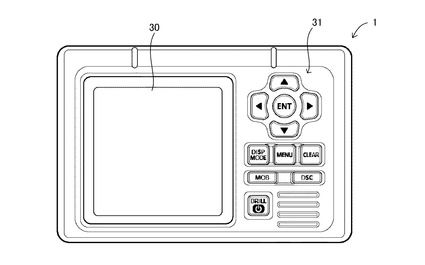
図1において、AIS装置1の正面パネルには、ディスプレイ30および複数のキースイッチ群31が設けられている。ディスプレイ30は略正方形の液晶ディスプレイであり、正面パネルの中央より左にかけて設けられている。ディスプレイ30には、受信部16で受信した他船のAIS情報が種々の表示形態で表示される。キースイッチ群31は、正面パネル右側に設けられており、確定(ENT)キー、上下キー、左右キー、表示モード(DISP MODE)キー、およびメニュー(MENU)キー等からなっている。ユーザは、これらのキースイッチ群31を用いて、後述の停船判定速度、アラーム距離、アラーム時間の設定やアラームの停止等の操作を行う。
【0019】
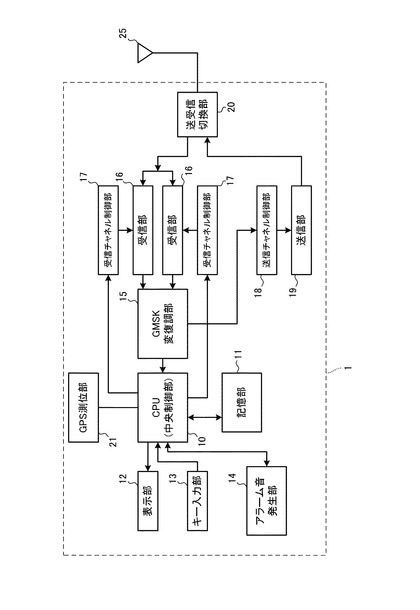
図2において、AIS装置1は、CPU10、記憶部11、表示部12、キー入力部13、アラーム音発生部14、GMSK変調復調部15、受信部16、受信チャンネル制御部17、送信チャンネル制御部18、送信部19、送受信切換部20およびGPS測位部21を備えている。送受信切換部20にはアンテナ25が接続されている。
【0020】
GMSK変調復調部15は、連続位相周波数偏移変調方式の一種であるGMSK(ガウス最小偏移変調:Gaussian minimum shift keying)により自船のAIS情報を変調するとともに、受信部16から入力された(GMSK変調された)他船のAIS情報を復調してCPU10に入力する。受信部16は受信した信号をGMSK変調復調部15に入力する。受信チャンネル制御部17は、受信部16の受信チャンネルを順次切り換える。これにより、受信部16は各チャンネルに送信されている他船のAIS情報を受信することができる。受信部16および受信チャンネル制御部17は、2系統並列に設けられており、並行してAISチャンネルを巡回して他船のAIS情報を受信する。
【0021】
送信チャンネル制御部18は、自船のAIS情報を送信する送信チャンネルを設定する。送信チャンネルは、受信部16の受信内容から空きチャンネルを探し、その空きチャンネルを送信チャンネルとすればよい。送信部19は、GMSK変調された自船のAIS情報を送信チャンネル制御部18によって設定されたチャンネルの周波数帯域に周波数シフトして送信する。送受信切換部20は、送信時には送信部19側にアンテナ25を切り換え、受信時には受信部16側にアンテナ25を切り換える。
【0022】
キー入力部13はキースイッチ群31を含み、ユーザによるキー操作を検出してCPU10に入力する。アラーム音発生部14は、CPU10からの指示に応じてアラーム音を発生する。
【0023】
CPU10はAIS装置1全体の動作を制御する。GPS測位部21は、GPSアンテナで受信したGPS衛星の電波に基づき自船の位置を測位する。CPU10は、GPS測位部21から自船位置、SOG.COGを含む測位結果を受け取る。また、CPU10は、これら自船の情報および受信部16で受信した他船の情報に基づき、他船距離(RNG)、他船方位(BRG)、最接近距離(CPA)、最接近時間(TCPA)を算出する等の処理を実行する。CPU10が実行する処理は図5のフローチャートにおいて詳細に説明する。
【0024】
記憶部11は、自船のAIS情報、他船のAIS情報および上記演算結果を記憶する。他船のAIS情報は一覧リスト(TARGET LIST)に登録され、このうち接近しつつある船舶は接近船舶リスト(DANGER LIST)にも登録される。これらの情報は、ユーザの操作に応じて図3に示すようにディスプレイ30に表示される。表示部12はディスプレイ30を含み、CPU10から入力された情報をディスプレイ30上に表示する。
【0025】
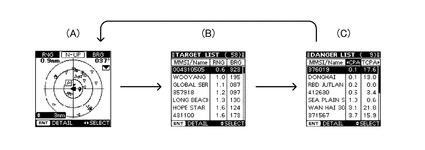
図3(A)〜(C)は、受信されたAIS情報の種々の表示態様を示す図である。図3(A)はプロッタ形式の表示例を示している。図3(B)は一覧リスト(TARGET
LIST)形式の表示画面の例を示す図である。この画面では、現在AIS情報を受信している他船(ターゲット)の情報がリスト表示される。このリストには、AIS情報のうち、ターゲットのMMSIコードまたは船名、距離(RNG)、自船に対する方位(BRG)が表示される。AIS情報は近いターゲットのものから順に1行ずつ表示される。
【0026】
図3(C)は接近船舶リスト(DANGER LIST)形式の表示画面の例を示す図である。接近船舶リストは、AIS情報を受信している他船(ターゲット)のうち、一定以内に接近する可能性のある接近船舶のみを抽出したリストである。たとえば、1時間以内(TCPA≦1h)に6海里以内(CPA≦6nm)を接近船舶として抽出・表示する。
【0027】
接近船舶のうち、さらに近距離に短時間のうちに接近し衝突の危険性がある他船(危険船舶)が現れた場合にはアラーム動作を実行する。
【0028】
危険船舶であるか否かを判定するしきい値のCPA,TCPAであるアラーム距離、アラーム時間は、1.5nm、20分がデフォルト値として設定されているが、それぞれ0.1〜6nm、1〜60分の範囲でユーザによる設定が可能である。
【0029】
アラーム音を鳴動させるターゲットのCPA,TCPAの範囲は、ユーザがキースイッチ群31を操作して設定することができる。アラーム音を鳴動させるターゲットのCPA,TCPAの範囲は、たとえば20分以内(TCPA≦20min)に1.5海里以内(CPA≦1.5nm)に設定される。
【0030】
また、アラーム動作は、ユーザの操作によって停止することができる。アラームが停止されたことを記憶するアラーム停止フラグは、接近船舶リストに登録される他船ごとにそれぞれ設けてもよく、接近船舶全体に対して一括して1つのフラグであってもよい。
【0031】
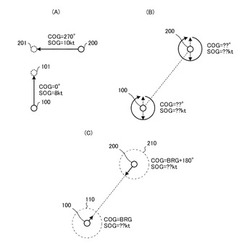
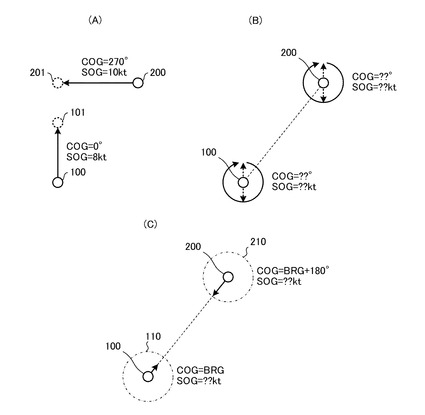
ここで、図4を参照して最接近距離(CPA)、最接近時間(TCPA)の算出手法と、本実施形態のAIS装置1の低速対応モード時(Slow Warn)の処理について説明する。
【0032】
図4(A)は、自船100、他船200が通常に航行している場合を示す図である。図において、自船100は、COG=0°、SOG=8kt(ノット)で航行している。また、他船は、COG=270°、SOG=10ktで航行している。この場合、自船100が予測位置101に到達し、他船200が予測位置201に到達するときの距離および時間がCPA、TCPAである。船舶がある程度以上の速度で航行している場合には、GPSの測位誤差が移動距離に比べて小さいため、測位結果に基づいて算出されるCOG,SOGも誤差が小さく安定した値が算出される。SOG,COGは今回の測位結果と前回の測位結果の差分ベクトルの長さと向きとなる。この算出されたCOG,SOGおよび自船位置、他船位置に基づいてCPA,TCPAが算出され、この算出されたCPA,TCPAがアラーム条件を満たす場合、すなわち、CPAがアラーム距離以下、且つTCPAがアラーム時間以内の場合、AIS装置1はアラーム動作を実行する。
【0033】
なお、他船のCOG,SOGは他船のAIS装置が算出するが、速度と誤差の条件は同じである。
【0034】
図4(B)は、自船100、他船200ともに停船若しくは低速で航行している場合を示す図である。船舶が停船若しくは低速で航行しているとき、自船位置はほぼ同じ位置であるが、GPSによる測位は数メートル〜数十メートルの測位誤差を有するため測位結果は毎回ランダムに異なり、このようにランダムな誤差を含む今回の測位結果と前回の測位結果の差分ベクトルで求められるCOG,SOGもランダムに変動する。COGは0°〜359.9°の範囲でランダムに変動し、SOGは0〜3kt程度の範囲でランダムに変動する。したがって、このCOG,SOGおよび自船位置、他船位置に基づいて算出されるCPA,TCPAもランダムな値となり、CPA,TCPAに基づく接近予測が信頼できないものになってしまう。また、算出されたCPA,TCPAがアラーム条件のしきい値を挟んで上下することもあり、アラームを停止しても繰り返しアラーム動作が再開されることにもなる。
【0035】
そこで、本発明のAIS装置1では、低速対応モードを導入した。図4(C)は、低速対応モード時のCPA,TCPAの算出手法を説明する図である。上述したように、自船および他船の一方または両方が停船または低速で航行しているとき、すなわち算出される対地速度(SOG)が低速判定速度SW未満のときは、相手船に向かっていくようにCOGを設定する。すなわち、自船のSOGが低速判定速度SW未満のときは、自船のCOGにBRGを設定して、すなわち相手船に向かう方向に固定してCPA,TCPAを算出する。また、他船のSOGが低速判定速度SW未満のときは、他船のCOGにBRG±180°を設定して、すなわち自船に向かう方向に固定してCPA,TCPAを算出する。
【0036】
このように、測位結果の誤差の影響が大きい停船/低速航行時には、最も危険度の高い相手船方向にCOGを設定してCPA,TCPAを算出することにより、停船/低速航行時にも信頼できる接近/危険予測を可能にしている。
【0037】
また、これによってCPA,TCPAがアラーム距離、アラーム時間を跨いで上下することがなくなるため、アラーム動作が実行/停止を繰り返すと言う課題も解決される。
【0038】
なお、低速判定速度SWは、デフォルト値として1ktが設定されているが、ユーザの操作によって0.1〜4.9ktの範囲で変更可能である。また、低速判定速度SWをOFF(=0)に設定することで低速対応モードを解除することができる。なお、低速対応モードをオン/オフする操作手順または操作子を別途設けてもよい。
【0039】
また、この実施形態では、1つの低速判定速度SWを自船、他船の停船判定に共通に用いているが、自船と他船で異なる低速判定速度SWを設定できるようにしてもよい。
【0040】
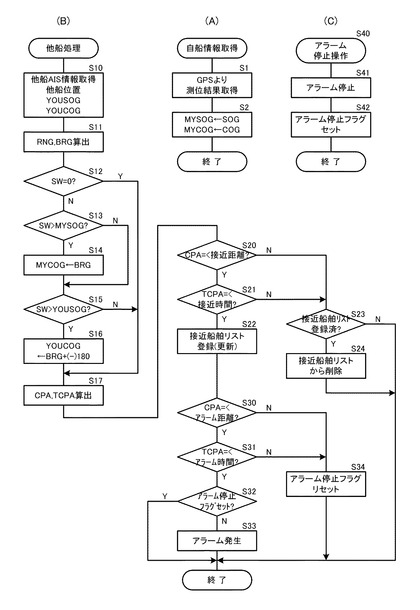
図5はAIS装置1のCPU10の動作を示すフローチャートである。図5(A)は自船情報取得動作を示すフローチャート、図5(B)は他船処理動作を示すフローチャート、図5(C)はアラーム停止動作を示すフローチャートである。このうち図5(A)の自船情報取得動作および図5(B)の他船処理動作は一定時間(たとえば5秒)ごとに実行され、図5(C)のアラーム停止動作はユーザによるアラーム停止操作に応じて実行される。また、図5(B)の他船処理動作は、受信部16で受信される他船情報ごとに毎回繰り返し実行される。
【0041】
図5(A)は、自船情報取得動作を示すフローチャートである。まずGPS測位部21から自船位置、対地速度SOG、対地方位COGを含む測位結果を取得する(S1)。そして、対地速度SOGをMYSOGに入力し、対地方位COGをMYCOGに入力する(S2)。
【0042】
図5(B)は、他船処理動作を示すフローチャートである。まず他船の位置、対地速度(YOUSOG)、対地方位(YOUCOG)を取得する(S10)。そして、他船位置と自船位置とに基づいて他船との距離RNGおよび他船への方位BRGを算出する(S11)。
【0043】
つぎに低速対応モードの低速判定速度SWが0であるかを判定する(S12)。停船判定速度SWが0であれば(S12でNO)、低速対応モードが解除されていることを意味するためS13〜S16をスキップしてS17に進む。低速判定速度SWが0よりも大きければ(S12でYES)、低速対応モードが設定されていることを意味するため、S13以下の処理を実行する。
【0044】
S13では自船の対地速度であるMYSOGが低速判定速度SW未満であるかを判断する。MYSOGが低速判定速度SW未満であれば(S13でYES)、自船の対地方位であるMYCOGに他船への方位であるBRGを設定する(S14)。次に、他船の対地速度であるYOUSOGが低速判定速度SW未満であるかを判断する(S15)。YOUSOGが低速判定速度SW未満であれば(S15でYES)、他船の対地方位であるYOUCOGに自船への方位を設定する(S16)。他船から自船への方位はBRGの逆方向であるため、YOUCOGが0°〜359.9°の範囲に納まるようにBRGに180°を加算または減算する。
【0045】
S17では、自船位置、MYSOG、MYCOGおよび他船位置、YOUSOG、YOUCOGを用いて最接近距離CPAおよび最接近時間TCPAを算出する。ここで、低速判定モードが設定されており、MYSOG/YOUSOGが低速判定速度SW未満であった場合には、MYCOG/YOUCOGとしてBRG/BRG±180°を用いてCPA、TCPAが算出されることになる。
【0046】
次に演算されたCPAおよびTCPAが危険距離、危険時間以下であるかを判定する(S20,S21)。CPAが所定の接近距離(たとえば6nm)以下であり(S20でYES)、且つTCPAが所定の接近時間(たとえば1時間)以内の場合には(S21でYES)、この注意する必要のある接近船舶として接近船舶リストに、この船舶の情報を登録する(S22)。既にこの船舶が接近船舶リストに登録されている場合にはその情報を更新する。CPAが所定の接近距離よりも大きい(S20でNO)またはTCPAが所定の接近時間よりも長い場合(S21でNO)には、注意を要する船舶ではないとしてこの他船に対する処理を終える。この場合に、この他船の情報が接近船舶リストに登録されている場合には(S23でYES)、この情報を接近船舶リストから削除したのち(S24)処理を終了する。
【0047】
この他船が接近船舶リストに登録される船舶であった場合には、S22の処理ののち以下のアラーム処理を実行する。
【0048】
まず、CPAおよびTCPAが所定のアラーム条件を満たすかを判定する。すなわち、CPAが所定のアラーム距離(たとえば1.5nm)以下であり(S30)、且つ、TCPAが所定のアラーム時間(たとえば20分)以内であるかを判定する(S31)。CPAがアラーム距離以下であり(S30でYES)、且つTCPAがアラーム時間以内の場合(S31でYES)には、アラーム動作を実行する(S33)。ただし、アラーム停止フラグがセットされている場合(S32でYES)には、アラーム動作を行わないで処理を終了する。CPAが所定のアラーム距離よりも大きい(S30でNO)またはTCPAが所定のアラーム時間よりも長い場合(S31でNO)には、アラーム停止フラグをリセットして(S34)処理を終了する。これにより、アラームが停止されても新たに他船がアラーム条件を満たしたとき再度アラーム動作が実行される。
【0049】
図5(C)はアラーム停止動作を示すフローチャートである。この処理はユーザによってアラーム停止操作が行われた(S40)ことを契機として実行される動作である。まずアラーム動作を停止させる(S41)。そして、そのときアラームの対象となっている全ての他船のアラーム停止フラグをセットして(S42)、処理を終了する。
【0050】
以上の実施形態は、船舶に搭載されるAIS装置について説明したが、本発明のターゲット識別装置は、船舶に搭載されるものに限定されない。
【符号の説明】
【0051】
1 AIS装置
30 ディスプレイ
31 キースイッチ群
【技術分野】
【0001】
この発明は、自装置とターゲットとの最接近距離、最接近時間を算出するターゲット識別装置およびターゲット移動予測方法に関する。
【背景技術】
【0002】
船舶相互の衝突予防、船舶の動静を把握した管制の容易化のために、船舶自動識別装置(AIS(Automatic Identification System)装置)が実用化されている。AIS装置は、GPS測位装置等を用いて自船位置や対地速度(SOG)、対地方位(COG)を測定するとともに、VHF帯の電波を用いて、他船から発信される識別情報(MMSIコード)、船名、位置、SOG、COG、目的地などを含むAIS情報を受信する機能を備えている。
【0003】
小型船舶用のAIS装置では、GPSによる測位結果履歴によって得られる差分ベクトルを用いて自船のSOG,COGを算出している(例えば特許文献1参照)。
【0004】
また、取得した自船情報、他船情報に基づき、他船が自船に最も接近する距離である最接近距離CPA、他船が自船に最も接近するまでの時間である最接近時刻TCPAを算出し、これらが所定値を下回る場合には、ユーザに注意を喚起する必要があるとしてアラームを発するものもある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−65392号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
GPS測位は、数メートル〜十数メートルの測位誤差を含んでいる。船舶がある程度以上の速度で航行している場合には、長い差分ベクトルが得られるため測位誤差の影響が小さいが、船舶が停止または低速で航行しているときは、得られる差分ベクトルが短いため測位誤差の影響が大きくなり、SOG,COGがランダムに変動する。たとえば、船舶が停止状態の場合、GPS衛星の配置やGPSエンジンが演算に使用するGPS衛星によっては、COGは0〜359.9の全方位、SOGは0〜3kt程度までの範囲でランダムに変動する。
【0007】
このため、停船時や低速航行時に出力されるCPA、TCPAは信頼度の低いものとなってしまい、接近や衝突の危険性を正しくユーザに告知することができないという問題点があった。また、CPA、TCPAがアラームのしきい値を跨いでランダムに変動する場合があり、このような場合には、一度止めたアラームが直後に再度なり始め、アラームの鳴動/停止が繰り返されるなどの問題点があった。
【0008】
この発明は、船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置およびターゲット移動予測方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1の発明は、移動体に搭載されるターゲット識別装置であって、自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する演算部と、を備え、前記演算部は、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出することを特徴とする。
【0010】
請求項2の発明は、前記自己情報取得部は、GPSによって測位された自己の位置に基づいて前記対地速度、対地方位を算出することを特徴とする。
【0011】
請求項3の発明は、前記演算部は、前記ターゲットの対地速度が所定の第2低速判定値以下のとき、ターゲットの対地方位を自己方向に書き換えて、前記最接近距離および最接近時間を算出することを特徴とする。
【0012】
請求項4の発明は、算出された最接近距離および最接近時間が、所定の警告条件を満たしたとき警報を発する警報手段をさらに備えたことを特徴とする。
【0013】
請求項5の発明は、移動体において、他の移動体であるターゲットの移動を予測するターゲット移動予測方法であって、自己の位置、対地速度、対地方位を取得する手順、ターゲットの位置、対地速度、対地方位を取得する手順、自己の対地速度と所定の低速判定値とを比較する手順、自己の対地速度が前記低速判定値よりも大きいとき、自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する手順、自己の対地速度が前記低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出する手順、を有することを特徴とする。
【発明の効果】
【0014】
この発明によれば、船舶等の移動体が停止または低速で移動している場合でも、信頼度の高い接近判定が可能になる。
【図面の簡単な説明】
【0015】
【図1】この発明の実施形態であるAIS装置の正面パネルの外観図である。
【図2】同AIS装置の内部構造のブロック図である。
【図3】同AIS装置のディスプレイに表示される各種画面を示す図である。
【図4】同AIS装置のCPA,TCPAの算出方式を説明する図である。
【図5】同AIS装置のDSCキーがオンされたときの動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
図面を参照してこの発明の実施形態である船舶自動識別装置(AIS装置)について説明する。図1はAIS装置の外観図、図2はAIS装置のブロック図である。
【0017】
AIS装置1は、自船のAIS情報を送信するとともに、他船のAIS情報を受信して表示する装置である。ここで、AIS情報は、船名、MMSIコード、現在位置、対地速度(SOG)、対地方位(COG)、仕向地、積載物等のデータからなる情報である。また、AIS装置1は、自船に極めて接近しつつある他船が存在する場合に、アラーム音およびアラーム表示からなるアラーム動作を実行してユーザに警告する。
【0018】
図1において、AIS装置1の正面パネルには、ディスプレイ30および複数のキースイッチ群31が設けられている。ディスプレイ30は略正方形の液晶ディスプレイであり、正面パネルの中央より左にかけて設けられている。ディスプレイ30には、受信部16で受信した他船のAIS情報が種々の表示形態で表示される。キースイッチ群31は、正面パネル右側に設けられており、確定(ENT)キー、上下キー、左右キー、表示モード(DISP MODE)キー、およびメニュー(MENU)キー等からなっている。ユーザは、これらのキースイッチ群31を用いて、後述の停船判定速度、アラーム距離、アラーム時間の設定やアラームの停止等の操作を行う。
【0019】
図2において、AIS装置1は、CPU10、記憶部11、表示部12、キー入力部13、アラーム音発生部14、GMSK変調復調部15、受信部16、受信チャンネル制御部17、送信チャンネル制御部18、送信部19、送受信切換部20およびGPS測位部21を備えている。送受信切換部20にはアンテナ25が接続されている。
【0020】
GMSK変調復調部15は、連続位相周波数偏移変調方式の一種であるGMSK(ガウス最小偏移変調:Gaussian minimum shift keying)により自船のAIS情報を変調するとともに、受信部16から入力された(GMSK変調された)他船のAIS情報を復調してCPU10に入力する。受信部16は受信した信号をGMSK変調復調部15に入力する。受信チャンネル制御部17は、受信部16の受信チャンネルを順次切り換える。これにより、受信部16は各チャンネルに送信されている他船のAIS情報を受信することができる。受信部16および受信チャンネル制御部17は、2系統並列に設けられており、並行してAISチャンネルを巡回して他船のAIS情報を受信する。
【0021】
送信チャンネル制御部18は、自船のAIS情報を送信する送信チャンネルを設定する。送信チャンネルは、受信部16の受信内容から空きチャンネルを探し、その空きチャンネルを送信チャンネルとすればよい。送信部19は、GMSK変調された自船のAIS情報を送信チャンネル制御部18によって設定されたチャンネルの周波数帯域に周波数シフトして送信する。送受信切換部20は、送信時には送信部19側にアンテナ25を切り換え、受信時には受信部16側にアンテナ25を切り換える。
【0022】
キー入力部13はキースイッチ群31を含み、ユーザによるキー操作を検出してCPU10に入力する。アラーム音発生部14は、CPU10からの指示に応じてアラーム音を発生する。
【0023】
CPU10はAIS装置1全体の動作を制御する。GPS測位部21は、GPSアンテナで受信したGPS衛星の電波に基づき自船の位置を測位する。CPU10は、GPS測位部21から自船位置、SOG.COGを含む測位結果を受け取る。また、CPU10は、これら自船の情報および受信部16で受信した他船の情報に基づき、他船距離(RNG)、他船方位(BRG)、最接近距離(CPA)、最接近時間(TCPA)を算出する等の処理を実行する。CPU10が実行する処理は図5のフローチャートにおいて詳細に説明する。
【0024】
記憶部11は、自船のAIS情報、他船のAIS情報および上記演算結果を記憶する。他船のAIS情報は一覧リスト(TARGET LIST)に登録され、このうち接近しつつある船舶は接近船舶リスト(DANGER LIST)にも登録される。これらの情報は、ユーザの操作に応じて図3に示すようにディスプレイ30に表示される。表示部12はディスプレイ30を含み、CPU10から入力された情報をディスプレイ30上に表示する。
【0025】
図3(A)〜(C)は、受信されたAIS情報の種々の表示態様を示す図である。図3(A)はプロッタ形式の表示例を示している。図3(B)は一覧リスト(TARGET
LIST)形式の表示画面の例を示す図である。この画面では、現在AIS情報を受信している他船(ターゲット)の情報がリスト表示される。このリストには、AIS情報のうち、ターゲットのMMSIコードまたは船名、距離(RNG)、自船に対する方位(BRG)が表示される。AIS情報は近いターゲットのものから順に1行ずつ表示される。
【0026】
図3(C)は接近船舶リスト(DANGER LIST)形式の表示画面の例を示す図である。接近船舶リストは、AIS情報を受信している他船(ターゲット)のうち、一定以内に接近する可能性のある接近船舶のみを抽出したリストである。たとえば、1時間以内(TCPA≦1h)に6海里以内(CPA≦6nm)を接近船舶として抽出・表示する。
【0027】
接近船舶のうち、さらに近距離に短時間のうちに接近し衝突の危険性がある他船(危険船舶)が現れた場合にはアラーム動作を実行する。
【0028】
危険船舶であるか否かを判定するしきい値のCPA,TCPAであるアラーム距離、アラーム時間は、1.5nm、20分がデフォルト値として設定されているが、それぞれ0.1〜6nm、1〜60分の範囲でユーザによる設定が可能である。
【0029】
アラーム音を鳴動させるターゲットのCPA,TCPAの範囲は、ユーザがキースイッチ群31を操作して設定することができる。アラーム音を鳴動させるターゲットのCPA,TCPAの範囲は、たとえば20分以内(TCPA≦20min)に1.5海里以内(CPA≦1.5nm)に設定される。
【0030】
また、アラーム動作は、ユーザの操作によって停止することができる。アラームが停止されたことを記憶するアラーム停止フラグは、接近船舶リストに登録される他船ごとにそれぞれ設けてもよく、接近船舶全体に対して一括して1つのフラグであってもよい。
【0031】
ここで、図4を参照して最接近距離(CPA)、最接近時間(TCPA)の算出手法と、本実施形態のAIS装置1の低速対応モード時(Slow Warn)の処理について説明する。
【0032】
図4(A)は、自船100、他船200が通常に航行している場合を示す図である。図において、自船100は、COG=0°、SOG=8kt(ノット)で航行している。また、他船は、COG=270°、SOG=10ktで航行している。この場合、自船100が予測位置101に到達し、他船200が予測位置201に到達するときの距離および時間がCPA、TCPAである。船舶がある程度以上の速度で航行している場合には、GPSの測位誤差が移動距離に比べて小さいため、測位結果に基づいて算出されるCOG,SOGも誤差が小さく安定した値が算出される。SOG,COGは今回の測位結果と前回の測位結果の差分ベクトルの長さと向きとなる。この算出されたCOG,SOGおよび自船位置、他船位置に基づいてCPA,TCPAが算出され、この算出されたCPA,TCPAがアラーム条件を満たす場合、すなわち、CPAがアラーム距離以下、且つTCPAがアラーム時間以内の場合、AIS装置1はアラーム動作を実行する。
【0033】
なお、他船のCOG,SOGは他船のAIS装置が算出するが、速度と誤差の条件は同じである。
【0034】
図4(B)は、自船100、他船200ともに停船若しくは低速で航行している場合を示す図である。船舶が停船若しくは低速で航行しているとき、自船位置はほぼ同じ位置であるが、GPSによる測位は数メートル〜数十メートルの測位誤差を有するため測位結果は毎回ランダムに異なり、このようにランダムな誤差を含む今回の測位結果と前回の測位結果の差分ベクトルで求められるCOG,SOGもランダムに変動する。COGは0°〜359.9°の範囲でランダムに変動し、SOGは0〜3kt程度の範囲でランダムに変動する。したがって、このCOG,SOGおよび自船位置、他船位置に基づいて算出されるCPA,TCPAもランダムな値となり、CPA,TCPAに基づく接近予測が信頼できないものになってしまう。また、算出されたCPA,TCPAがアラーム条件のしきい値を挟んで上下することもあり、アラームを停止しても繰り返しアラーム動作が再開されることにもなる。
【0035】
そこで、本発明のAIS装置1では、低速対応モードを導入した。図4(C)は、低速対応モード時のCPA,TCPAの算出手法を説明する図である。上述したように、自船および他船の一方または両方が停船または低速で航行しているとき、すなわち算出される対地速度(SOG)が低速判定速度SW未満のときは、相手船に向かっていくようにCOGを設定する。すなわち、自船のSOGが低速判定速度SW未満のときは、自船のCOGにBRGを設定して、すなわち相手船に向かう方向に固定してCPA,TCPAを算出する。また、他船のSOGが低速判定速度SW未満のときは、他船のCOGにBRG±180°を設定して、すなわち自船に向かう方向に固定してCPA,TCPAを算出する。
【0036】
このように、測位結果の誤差の影響が大きい停船/低速航行時には、最も危険度の高い相手船方向にCOGを設定してCPA,TCPAを算出することにより、停船/低速航行時にも信頼できる接近/危険予測を可能にしている。
【0037】
また、これによってCPA,TCPAがアラーム距離、アラーム時間を跨いで上下することがなくなるため、アラーム動作が実行/停止を繰り返すと言う課題も解決される。
【0038】
なお、低速判定速度SWは、デフォルト値として1ktが設定されているが、ユーザの操作によって0.1〜4.9ktの範囲で変更可能である。また、低速判定速度SWをOFF(=0)に設定することで低速対応モードを解除することができる。なお、低速対応モードをオン/オフする操作手順または操作子を別途設けてもよい。
【0039】
また、この実施形態では、1つの低速判定速度SWを自船、他船の停船判定に共通に用いているが、自船と他船で異なる低速判定速度SWを設定できるようにしてもよい。
【0040】
図5はAIS装置1のCPU10の動作を示すフローチャートである。図5(A)は自船情報取得動作を示すフローチャート、図5(B)は他船処理動作を示すフローチャート、図5(C)はアラーム停止動作を示すフローチャートである。このうち図5(A)の自船情報取得動作および図5(B)の他船処理動作は一定時間(たとえば5秒)ごとに実行され、図5(C)のアラーム停止動作はユーザによるアラーム停止操作に応じて実行される。また、図5(B)の他船処理動作は、受信部16で受信される他船情報ごとに毎回繰り返し実行される。
【0041】
図5(A)は、自船情報取得動作を示すフローチャートである。まずGPS測位部21から自船位置、対地速度SOG、対地方位COGを含む測位結果を取得する(S1)。そして、対地速度SOGをMYSOGに入力し、対地方位COGをMYCOGに入力する(S2)。
【0042】
図5(B)は、他船処理動作を示すフローチャートである。まず他船の位置、対地速度(YOUSOG)、対地方位(YOUCOG)を取得する(S10)。そして、他船位置と自船位置とに基づいて他船との距離RNGおよび他船への方位BRGを算出する(S11)。
【0043】
つぎに低速対応モードの低速判定速度SWが0であるかを判定する(S12)。停船判定速度SWが0であれば(S12でNO)、低速対応モードが解除されていることを意味するためS13〜S16をスキップしてS17に進む。低速判定速度SWが0よりも大きければ(S12でYES)、低速対応モードが設定されていることを意味するため、S13以下の処理を実行する。
【0044】
S13では自船の対地速度であるMYSOGが低速判定速度SW未満であるかを判断する。MYSOGが低速判定速度SW未満であれば(S13でYES)、自船の対地方位であるMYCOGに他船への方位であるBRGを設定する(S14)。次に、他船の対地速度であるYOUSOGが低速判定速度SW未満であるかを判断する(S15)。YOUSOGが低速判定速度SW未満であれば(S15でYES)、他船の対地方位であるYOUCOGに自船への方位を設定する(S16)。他船から自船への方位はBRGの逆方向であるため、YOUCOGが0°〜359.9°の範囲に納まるようにBRGに180°を加算または減算する。
【0045】
S17では、自船位置、MYSOG、MYCOGおよび他船位置、YOUSOG、YOUCOGを用いて最接近距離CPAおよび最接近時間TCPAを算出する。ここで、低速判定モードが設定されており、MYSOG/YOUSOGが低速判定速度SW未満であった場合には、MYCOG/YOUCOGとしてBRG/BRG±180°を用いてCPA、TCPAが算出されることになる。
【0046】
次に演算されたCPAおよびTCPAが危険距離、危険時間以下であるかを判定する(S20,S21)。CPAが所定の接近距離(たとえば6nm)以下であり(S20でYES)、且つTCPAが所定の接近時間(たとえば1時間)以内の場合には(S21でYES)、この注意する必要のある接近船舶として接近船舶リストに、この船舶の情報を登録する(S22)。既にこの船舶が接近船舶リストに登録されている場合にはその情報を更新する。CPAが所定の接近距離よりも大きい(S20でNO)またはTCPAが所定の接近時間よりも長い場合(S21でNO)には、注意を要する船舶ではないとしてこの他船に対する処理を終える。この場合に、この他船の情報が接近船舶リストに登録されている場合には(S23でYES)、この情報を接近船舶リストから削除したのち(S24)処理を終了する。
【0047】
この他船が接近船舶リストに登録される船舶であった場合には、S22の処理ののち以下のアラーム処理を実行する。
【0048】
まず、CPAおよびTCPAが所定のアラーム条件を満たすかを判定する。すなわち、CPAが所定のアラーム距離(たとえば1.5nm)以下であり(S30)、且つ、TCPAが所定のアラーム時間(たとえば20分)以内であるかを判定する(S31)。CPAがアラーム距離以下であり(S30でYES)、且つTCPAがアラーム時間以内の場合(S31でYES)には、アラーム動作を実行する(S33)。ただし、アラーム停止フラグがセットされている場合(S32でYES)には、アラーム動作を行わないで処理を終了する。CPAが所定のアラーム距離よりも大きい(S30でNO)またはTCPAが所定のアラーム時間よりも長い場合(S31でNO)には、アラーム停止フラグをリセットして(S34)処理を終了する。これにより、アラームが停止されても新たに他船がアラーム条件を満たしたとき再度アラーム動作が実行される。
【0049】
図5(C)はアラーム停止動作を示すフローチャートである。この処理はユーザによってアラーム停止操作が行われた(S40)ことを契機として実行される動作である。まずアラーム動作を停止させる(S41)。そして、そのときアラームの対象となっている全ての他船のアラーム停止フラグをセットして(S42)、処理を終了する。
【0050】
以上の実施形態は、船舶に搭載されるAIS装置について説明したが、本発明のターゲット識別装置は、船舶に搭載されるものに限定されない。
【符号の説明】
【0051】
1 AIS装置
30 ディスプレイ
31 キースイッチ群
【特許請求の範囲】
【請求項1】
移動体に搭載されるターゲット識別装置であって、
自己の位置、対地速度、対地方位を取得する自己情報取得部と、
ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、
自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する演算部と、を備え、
前記演算部は、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出するターゲット識別装置。
【請求項2】
前記自己情報取得部は、GPS(Global Positioning System)によって測位された自己の位置に基づいて前記対地速度、対地方位を算出する請求項1に記載のターゲット識別装置。
【請求項3】
前記演算部は、前記ターゲットの対地速度が所定の第2低速判定値以下のとき、ターゲットの対地方位を自己方向に書き換えて、前記最接近距離および最接近時間を算出する請求項1または請求項2に記載のターゲット識別装置。
【請求項4】
算出された最接近距離および最接近時間が、所定の警告条件を満たしたとき警報を発する警報手段をさらに備えた請求項1乃至請求項3のいずれかに記載のターゲット識別装置。
【請求項5】
移動体において、他の移動体であるターゲットの移動を予測するターゲット移動予測方法であって、
自己の位置、対地速度、対地方位を取得する手順、
ターゲットの位置、対地速度、対地方位を取得する手順、
自己の対地速度と所定の低速判定値とを比較する手順、
自己の対地速度が前記低速判定値よりも大きいとき、自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する手順、
自己の対地速度が前記低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出する手順、
を有するターゲット移動予測方法。
【請求項1】
移動体に搭載されるターゲット識別装置であって、
自己の位置、対地速度、対地方位を取得する自己情報取得部と、
ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、
自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する演算部と、を備え、
前記演算部は、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出するターゲット識別装置。
【請求項2】
前記自己情報取得部は、GPS(Global Positioning System)によって測位された自己の位置に基づいて前記対地速度、対地方位を算出する請求項1に記載のターゲット識別装置。
【請求項3】
前記演算部は、前記ターゲットの対地速度が所定の第2低速判定値以下のとき、ターゲットの対地方位を自己方向に書き換えて、前記最接近距離および最接近時間を算出する請求項1または請求項2に記載のターゲット識別装置。
【請求項4】
算出された最接近距離および最接近時間が、所定の警告条件を満たしたとき警報を発する警報手段をさらに備えた請求項1乃至請求項3のいずれかに記載のターゲット識別装置。
【請求項5】
移動体において、他の移動体であるターゲットの移動を予測するターゲット移動予測方法であって、
自己の位置、対地速度、対地方位を取得する手順、
ターゲットの位置、対地速度、対地方位を取得する手順、
自己の対地速度と所定の低速判定値とを比較する手順、
自己の対地速度が前記低速判定値よりも大きいとき、自己の位置、対地速度、対地方位、および、前記ターゲットの位置、対地速度、対地方位に基づいて、自己と前記ターゲットとの最接近距離および最接近時間を算出する手順、
自己の対地速度が前記低速判定値以下のとき、自己の対地方位を前記ターゲットの方向に書き換えて、前記最接近距離および最接近時間を算出する手順、
を有するターゲット移動予測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−155359(P2012−155359A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−11127(P2011−11127)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000100746)アイコム株式会社 (273)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000100746)アイコム株式会社 (273)
【Fターム(参考)】
[ Back to top ]