
タービン制御装置
【課題】機械機構の故障等による制御系の切り離しを防ぎ、制御冗長性を維持可能な3重化並列冗長制御方式のタービン制御装置を提供する。
【解決手段】機械機構の故障等によって生じる異常振動の影響を受ける比例積分演算器53への入力信号、例えば加算弁位置検出器34で検出される加減弁位置信号、又はバイパス弁位置検出器35で検出されるバイパス弁位置信号に対して、一次遅れ80を掛けて、異常振動を抑制する。
【解決手段】機械機構の故障等によって生じる異常振動の影響を受ける比例積分演算器53への入力信号、例えば加算弁位置検出器34で検出される加減弁位置信号、又はバイパス弁位置検出器35で検出されるバイパス弁位置信号に対して、一次遅れ80を掛けて、異常振動を抑制する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、原子力発電所等において用いられるタービン制御装置に係り、特に、タービンの蒸気量を制御するための3コイルサーボ弁(以下、これを「EPR弁」という。)を3重化並列冗長制御するタービン制御装置の制御性の改善に関する。
【背景技術】
【0002】
従来、通常運転中の原子力発電所においては、所定の原子炉圧力を設定し、原子炉内がこの所定圧力に保たれるように原子炉で発生した蒸気の圧力を制御するため、タービンに供給する蒸気量の制御を行っている。そのため、タービン入口圧力(主蒸気圧力)制御装置(本明細書においては、これを「タービン制御装置」という。)は、制御演算を行うデジタルコントローラを主な構成要素として有し、主蒸気圧力、加減弁開度位置、及びバイパス弁開度位置等の原子力発電所状態量を入力することにより、設定された圧力に従って制御演算を行った後にEPRサーボ弁指令を出力し、EPR弁の開閉弁駆動を介して蒸気加減弁及びタービンバイパス弁を駆動させ、主蒸気圧力を制御する。
【0003】
従来、この種のタービン制御装置においては、冗長性を持たせるためにEPR弁の制御を3重化する構成が主流になっている(例えば、特許文献1の図4参照)。かかる構成によれば、いずれかの制御系に変動が生じた際に、各コントローラによる自己診断及び相互診断が可能となるので、各コントローラの制御指令を平均値にバランスさせることができ、制御演算結果が次の制御動作に与える影響を抑制することができる。
【0004】
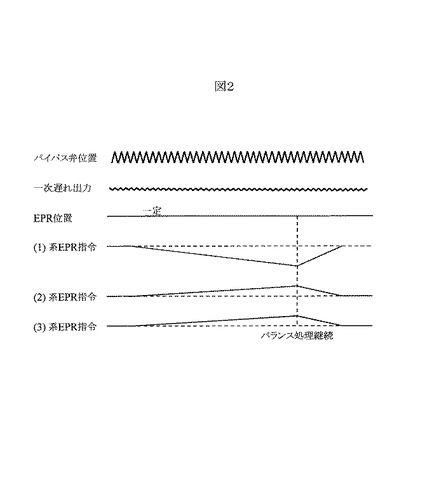
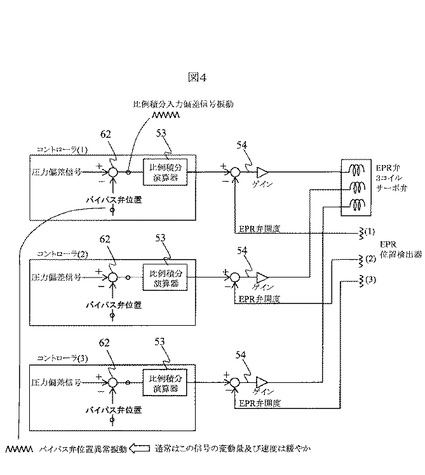
図3に、特許文献1に記載されたタービン制御装置のブロック構成を示す。この図から明らかなように、従来例に係るタービン制御装置は、主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35、圧力設定器51、圧力調整器52、比例積分演算器53、弁開度指令54、及び加算器60、61、62から構成され、状態量検出手段としての主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35の状態検出値を基に制御指令としての弁開度指令54を生成する。
【0005】
制御系列として、まず、目標値を設定した圧力設定器51から増指令又は減指令が状態に合わせて出力される。また、主蒸気圧力検出器32から、発電所の状態量である主蒸気圧力が検出される。この圧力設定器51の値と主蒸気圧力検出器32の値との偏差に応じて加算器60で圧力偏差信号を生成し、この加算器60の出力である圧力偏差信号を配管補償フィルタ70へ出力する。そして、配管補償フィルタ70によって補償された信号を圧力調整器52へ入力する。
【0006】
一方、加減弁位置検出器34の状態検出値とパイパス弁位置検出器35の状態検出値は、加算器61で加算される。この加算器61の値と圧力調整器52の値との偏差が加算器62で算出され、加算器62の値が比例積分演算器53へ入力される。ここで、比例積分演算器53は、加算器62からの信号を比例積分演算し、制御状態を一定に維持するため、加算器62の出力を零に抑制するための制御信号を出力する。この比例積分演算器53の値が弁開度指令54として生成される。
【0007】
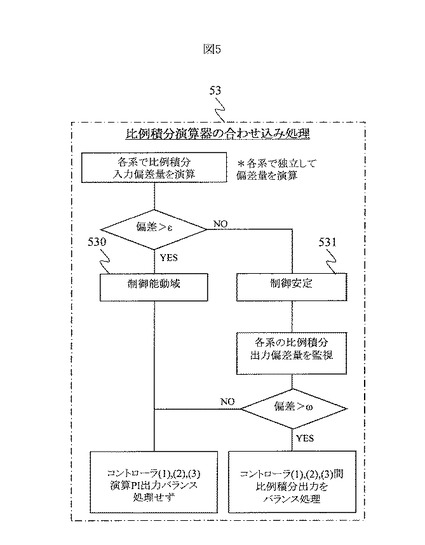
以下、比例積分演算器53で行われる合わせ込み処理を、図4及び図5を用いて説明する。図4はコントローラ及び弁駆動装置のブロック図であり、図5は比例積分演算器で行われる合わせ込み処理の流れを示す流れ図である。
【0008】
比例積分演算は、まずステップS1で、各系のコントローラ(1)、(2)、(3)が独立して加算器62から比例積分演算器53への入力偏差量を演算し、ステップS2で、各系が求めた入力偏差量が予め設定された所定値εより大きいか否かを比較する。ステップS2で各系の偏差量が所定値εより大きい(YES)と判定した場合は、ステップS3に移行して制御能動域とし、ステップS2で各系の偏差量が所定値εより小さい(NO)と判定した場合は、ステップS4に移行して制御安定域とする。また、制御安定域にあると判断した場合は、ステップS5に移行して、各系のコントローラ(1)、(2)、(3)で比例積分演算器53の出力偏差量を監視し、ステップS6で、比例積分演算器53の出力偏差量が予め設定された所定値ωより大きいか否かを比較する。ステップS6で各系の偏差量が所定値ωより大きい(YES)と判定した場合は、ステップS7に移行して各系のコントローラ(1)、(2)、(3)における比例積分演算器53の出力に対してバランス処理を行い、ステップS6で各系の偏差量が所定値ωよりも小さい(NO)と判定した場合は、バランス処理を行わない。また、ステップS3で制御能動域とされた場合も、バランス処理を行わない。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平08−144709号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
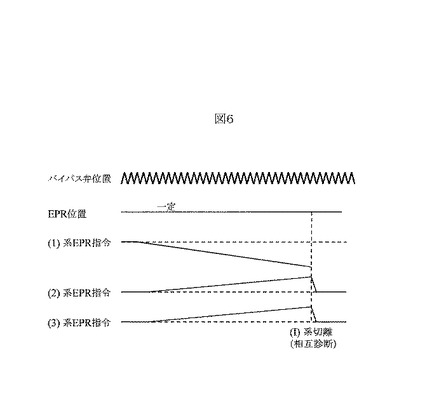
しかしながら、この制御方法によると、故障等により蒸気加減弁又はバイパス弁を動作させるための機械機構に異常振動が発生した場合、図4及び図6に示すように、加減弁位置検出器34又はバイパス弁位置検出器35の検出信号が異常振動となり、図5のステップS2で比例積分演算器53への入力信号の偏差量が所定値εよりも大きいと判断されて制御能動域となるので、コントローラ(1)、(2)、(3)で比例積分演算器53の出力のバランス処理が行われない。そして、異常振動が長時間継続した場合には、各系の比例積分演算器53の出力が入力誤差の積み重ねによって大きく離れるため、各コントローラ(1)、(2)、(3)の相互診断機能によりいずれかの制御系が切り離される。このように、従来のタービン制御装置では、故障等により蒸気加減弁又はバイパス弁を動作させるための機械機構に異常振動が発生した場合に、制御系の異常ではないにも拘らず、制御系の異常と判断して少なくとも1つの制御系が切り離されるので、制御系の冗長性が低下する。
【0011】
本発明は、このような従来技術の実情に鑑みてなされたものであり、その目的は、3重化並列冗長制御方式のタービン制御装置において、機械機構の故障等による制御系の切り離しを防ぎ、制御冗長性を維持することにある。
【課題を解決するための手段】
【0012】
本発明は、前記課題を解決するため、タービン制御に関する制御対象の状態量を検出する複数の状態量検出手段と、前記制御対象に対する目標値を設定する目標値設定手段と、前記状態量検出手段が検出した状態量と前記目標値設定手段に設定された目標値の偏差を算出する複数の偏差算出手段と、これら複数の偏差算出手段が算出した偏差を零に抑制するための制御指令を算出する複数の制御指令生成手段と、該制御指令生成手段により生成された制御指令に応じて前記制御対象を駆動する駆動手段と、前記複数の偏差算出手段により算出された複数の偏差を相互に判断して異常の検出を行う異常検出手段と、該異常検出手段により異常が検出されない場合に前記複数の偏差の合わせ込みを行う合わせ込み処理手段と、前記異常検出手段により異常が検出された場合に、前記複数の駆動手段の少なくとも1つを制御系から切り離す制御系切り離し手段を有するタービン制御装置において、前記制御対象に含まれる機械機構の故障等により、前記状態量検出手段が検出した状態量に異常振動が発生した場合に、前記偏差算出手段による前記偏差の算出に与える前記異常振動の影響を抑制することで、前記制御系切り離し手段による制御系の切り離しを防止するための制御機能を備えたことを特徴とする。
【0013】
かかる構成によると、タービン制御系に異常振動の影響を抑制するための制御機能を備えたので、制御対象に含まれる機械機構の故障等により制御対象に異常振動が生じ、それによって状態量検出手段が検出した状態量が異常振動した場合にも、その状態量の異常振動が制御機能によって抑制される。よって、偏差算出手段による偏差の算出に異常振動の悪影響が波及せず、制御系の切り離しを防止できて、制御の冗長性を維持することができる。
【0014】
また本発明は、前記構成のタービン制御装置において、前記制御系の切り離しを防止するための制御機能として、前記状態量検出手段が検出した状態量に一次遅れを与えて前記偏差算出手段に入力する一次遅れ要素を備えたことを特徴とする。
【0015】
かかる構成によると、状態量検出手段と偏差算出手段との間に一次遅れ要素を備えるだけで良いので、冗長性に優れたタービン制御装置を簡易に構成することができる。
【0016】
また本発明は、前記構成のタービン制御装置において、前記一次遅れ要素の時定数をTi、タービン制御装置を用いて制御されるタービン制御系の応答可能時間をTr、前記タービン制御系に備えられる配管補償フィルタの時定数をTcとしたとき、前記一次遅れ要素の時定数Tiを、Tr≦Ti≦Tcの範囲に設定したことを特徴とする。
【0017】
一次遅れ要素の時定数Tiをタービン制御系の応答可能時間Trよりも小さくすると、一次遅れ要素によって機械機構の異常振動に起因する状態量の異常振動をコントローラ(1)、(2)、(3)が応答可能な範囲まで抑制できないので、一次遅れ要素を付加する意味が失われる。また、一次遅れ要素の時定数Tiをタービン制御系に備えられる配管補償フィルタの時定数Tcよりも大きくすると、配管補償フィルタを備える意味が失われるばかりでなく、コントローラ(1)、(2)、(3)からの出力信号に明確な立ち上がりが現れなくなるため、本来の制御を行うことが著しく困難になるか、不可能になる。したがって、一次遅れ要素の時定数TiをTr≦Ti≦Tcの範囲に設定することにより、タービン制御系の適正な制御が可能になる。
【発明の効果】
【0018】
本発明は、3重化並列冗長制御方式のタービン制御装置において、制御対象に含まれる機械機構の故障等により状態量検出手段が検出した状態量に異常振動が発生した場合に、偏差算出手段による前記偏差の算出に与える異常振動の影響を抑制して、制御系切り離し手段による制御系の切り離しを防止するための制御機能を備えたので、異常振動の発生時にも制御の冗長性を維持することができ、タービン制御の信頼性を高めることができる。
【図面の簡単な説明】
【0019】
【図1】実施形態に係るタービン制御装置のブロック図である。
【図2】実施形態に係るタービン制御装置の効果を示す図である。
【図3】従来例に係るタービン制御装置のブロック図である。
【図4】従来例に係るタービン制御装置に備えられるコントローラ及び弁駆動装置のブロック図である。
【図5】比例積分演算器で行われる合わせ込み処理の流れを示す流れ図である。
【図6】従来例に係るタービン制御装置の問題点を示す図である。
【発明を実施するための形態】
【0020】
以下、本発明に係るタービン制御装置の実施形態を、図1及び図2を用いて説明する。
【0021】
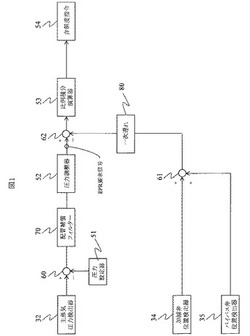
図1と図3との対比から明らかなように、実施形態に係るタービン制御装置も、基本的な構成に関しては、従来例に係るタービン制御装置と同じである。即ち、実施形態に係るタービン制御装置も、従来例に係るタービン制御装置と同様に、主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35、圧力設定器51、圧力調整器52、比例積分演算器53、弁開度指令54、及び加算器60、61、62から構成され、状態量検出手段としての主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35の状態検出値を基に制御指令としての弁開度指令54を生成する。
【0022】
比例積分演算器53で行われる合わせ込み処理についても、従来例に係るタービン制御装置と同様であり、図4及び図5を用いて説明したように、まずステップS1で、各系のコントローラ(1)、(2)、(3)が独立して加算器62から比例積分演算器53への入力偏差量を演算し、ステップS2で、各系が求めた入力偏差量が予め設定された所定値εより大きいか否かを比較する。ステップS2で各系の偏差量が所定値εより大きい(YES)と判定した場合は、ステップS3に移行して制御能動域とし、ステップS2で各系の偏差量が所定値εより小さい(NO)と判定した場合は、ステップS4に移行して制御安定域とする。また、制御安定域にあると判断した場合は、ステップS5に移行して、各系のコントローラ(1)、(2)、(3)で比例積分演算器53の出力偏差量を監視し、ステップS6で、比例積分演算器53の出力偏差量が予め設定された所定値ωより大きいか否かを比較する。ステップS6で各系の偏差量が所定値ωより大きい(YES)と判定した場合は、ステップS7に移行して各系のコントローラ(1)、(2)、(3)における比例積分演算器53の出力に対してバランス処理を行い、ステップS6で各系の偏差量が所定値ωよりも小さい(NO)と判定した場合は、バランス処理を行わない。また、ステップS3で制御能動域とされた場合も、バランス処理を行わない。
【0023】
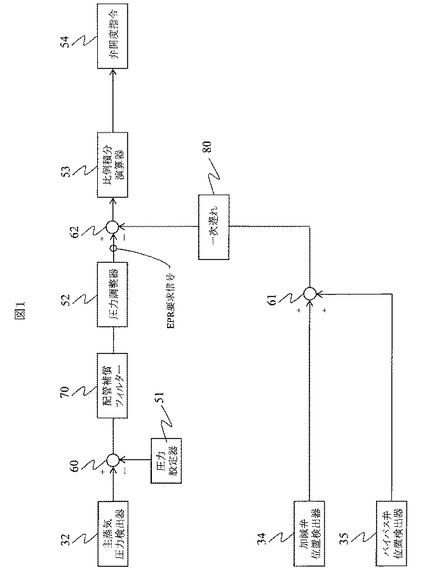
図1に示すように、本願に係るタービン制御装置は、加算器61の信号に一次遅れ80を掛けて加算器62に入力することを特徴とする。かかる構成によると、図2に示すように、仮に加算弁位置検出器34で検出された加減弁位置、又はバイパス弁位置検出器35で検出されたバイパス弁位置が機械機構の故障等によって異常振動したとしても、一次遅れ80を通過することによって異常振動が抑制されるので、比例積分演算器53の合わせ込み処理において、各コントローラに対する比例積分入力偏差量及び比例積分出力偏差量が所定値ε,ωよりも小さくなり、コントローラ(1)、(2)、(3)間で比例積分出力のバランス処理が行われる。よって、コントローラ(1)、(2)、(3)間での制御系の切り離しを防止でき、制御の冗長性を維持することができる。
【0024】
一次遅れ80の時定数は、当該一次遅れ要素80の時定数をTi、タービン制御装置を用いて制御されるタービン制御系の応答可能時間をTr、タービン制御系に備えられる配管補償フィルタ70の時定数をTcとしたとき、Tr≦Ti≦Tcの範囲に設定される。
【0025】
一次遅れ要素の時定数Tiをタービン制御系の応答可能時間Trよりも小さくすると、一次遅れ要素によって機械機構の異常振動に起因する状態量の異常振動をコントローラ(1)、(2)、(3)が応答可能な範囲まで抑制できないので、一次遅れ要素を付加する意味が失われる。また、一次遅れ要素の時定数Tiをタービン制御系に備えられる配管補償フィルタの時定数Tcよりも大きくすると、配管補償フィルタを備える意味が失われるばかりでなく、コントローラ(1)、(2)、(3)からの出力信号に明確な立ち上がりが現れなくなるため、本来の制御を行うことが著しく困難になるか、不可能になる。したがって、一次遅れ要素の時定数TiをTr≦Ti≦Tcの範囲に設定することにより、タービン制御系の適正な制御が可能になる。
【0026】
なお、前記実施形態においては、機械機構の異常振動に起因する制御系の切り離しを防止するための制御機能として一次遅れ要素80を備えたが、本発明の要旨はこれに限定されるものではなく、制御対象に含まれる機械機構の故障等により、状態量検出手段が検出した状態量に異常振動が発生した場合に、偏差算出手段による偏差の算出に与える異常振動の影響を抑制することで、制御系切り離し手段による制御系の切り離しを防止可能な任意の手段を備えることができる。
【産業上の利用可能性】
【0027】
本発明は、火力発電所や原子力発電所における主蒸気圧力の制御に利用できる。
【符号の説明】
【0028】
32…主蒸気圧力検出器
34…加減弁位置検出器
35…バイパス弁位置検出器
51…圧力設定器
52…圧力調整器
53…比例積分演算器
54…弁開度指令
60、61、62…加算器
70…配管補償フィルタ
80…一次遅れ
【技術分野】
【0001】
本発明は、原子力発電所等において用いられるタービン制御装置に係り、特に、タービンの蒸気量を制御するための3コイルサーボ弁(以下、これを「EPR弁」という。)を3重化並列冗長制御するタービン制御装置の制御性の改善に関する。
【背景技術】
【0002】
従来、通常運転中の原子力発電所においては、所定の原子炉圧力を設定し、原子炉内がこの所定圧力に保たれるように原子炉で発生した蒸気の圧力を制御するため、タービンに供給する蒸気量の制御を行っている。そのため、タービン入口圧力(主蒸気圧力)制御装置(本明細書においては、これを「タービン制御装置」という。)は、制御演算を行うデジタルコントローラを主な構成要素として有し、主蒸気圧力、加減弁開度位置、及びバイパス弁開度位置等の原子力発電所状態量を入力することにより、設定された圧力に従って制御演算を行った後にEPRサーボ弁指令を出力し、EPR弁の開閉弁駆動を介して蒸気加減弁及びタービンバイパス弁を駆動させ、主蒸気圧力を制御する。
【0003】
従来、この種のタービン制御装置においては、冗長性を持たせるためにEPR弁の制御を3重化する構成が主流になっている(例えば、特許文献1の図4参照)。かかる構成によれば、いずれかの制御系に変動が生じた際に、各コントローラによる自己診断及び相互診断が可能となるので、各コントローラの制御指令を平均値にバランスさせることができ、制御演算結果が次の制御動作に与える影響を抑制することができる。
【0004】
図3に、特許文献1に記載されたタービン制御装置のブロック構成を示す。この図から明らかなように、従来例に係るタービン制御装置は、主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35、圧力設定器51、圧力調整器52、比例積分演算器53、弁開度指令54、及び加算器60、61、62から構成され、状態量検出手段としての主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35の状態検出値を基に制御指令としての弁開度指令54を生成する。
【0005】
制御系列として、まず、目標値を設定した圧力設定器51から増指令又は減指令が状態に合わせて出力される。また、主蒸気圧力検出器32から、発電所の状態量である主蒸気圧力が検出される。この圧力設定器51の値と主蒸気圧力検出器32の値との偏差に応じて加算器60で圧力偏差信号を生成し、この加算器60の出力である圧力偏差信号を配管補償フィルタ70へ出力する。そして、配管補償フィルタ70によって補償された信号を圧力調整器52へ入力する。
【0006】
一方、加減弁位置検出器34の状態検出値とパイパス弁位置検出器35の状態検出値は、加算器61で加算される。この加算器61の値と圧力調整器52の値との偏差が加算器62で算出され、加算器62の値が比例積分演算器53へ入力される。ここで、比例積分演算器53は、加算器62からの信号を比例積分演算し、制御状態を一定に維持するため、加算器62の出力を零に抑制するための制御信号を出力する。この比例積分演算器53の値が弁開度指令54として生成される。
【0007】
以下、比例積分演算器53で行われる合わせ込み処理を、図4及び図5を用いて説明する。図4はコントローラ及び弁駆動装置のブロック図であり、図5は比例積分演算器で行われる合わせ込み処理の流れを示す流れ図である。
【0008】
比例積分演算は、まずステップS1で、各系のコントローラ(1)、(2)、(3)が独立して加算器62から比例積分演算器53への入力偏差量を演算し、ステップS2で、各系が求めた入力偏差量が予め設定された所定値εより大きいか否かを比較する。ステップS2で各系の偏差量が所定値εより大きい(YES)と判定した場合は、ステップS3に移行して制御能動域とし、ステップS2で各系の偏差量が所定値εより小さい(NO)と判定した場合は、ステップS4に移行して制御安定域とする。また、制御安定域にあると判断した場合は、ステップS5に移行して、各系のコントローラ(1)、(2)、(3)で比例積分演算器53の出力偏差量を監視し、ステップS6で、比例積分演算器53の出力偏差量が予め設定された所定値ωより大きいか否かを比較する。ステップS6で各系の偏差量が所定値ωより大きい(YES)と判定した場合は、ステップS7に移行して各系のコントローラ(1)、(2)、(3)における比例積分演算器53の出力に対してバランス処理を行い、ステップS6で各系の偏差量が所定値ωよりも小さい(NO)と判定した場合は、バランス処理を行わない。また、ステップS3で制御能動域とされた場合も、バランス処理を行わない。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平08−144709号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、この制御方法によると、故障等により蒸気加減弁又はバイパス弁を動作させるための機械機構に異常振動が発生した場合、図4及び図6に示すように、加減弁位置検出器34又はバイパス弁位置検出器35の検出信号が異常振動となり、図5のステップS2で比例積分演算器53への入力信号の偏差量が所定値εよりも大きいと判断されて制御能動域となるので、コントローラ(1)、(2)、(3)で比例積分演算器53の出力のバランス処理が行われない。そして、異常振動が長時間継続した場合には、各系の比例積分演算器53の出力が入力誤差の積み重ねによって大きく離れるため、各コントローラ(1)、(2)、(3)の相互診断機能によりいずれかの制御系が切り離される。このように、従来のタービン制御装置では、故障等により蒸気加減弁又はバイパス弁を動作させるための機械機構に異常振動が発生した場合に、制御系の異常ではないにも拘らず、制御系の異常と判断して少なくとも1つの制御系が切り離されるので、制御系の冗長性が低下する。
【0011】
本発明は、このような従来技術の実情に鑑みてなされたものであり、その目的は、3重化並列冗長制御方式のタービン制御装置において、機械機構の故障等による制御系の切り離しを防ぎ、制御冗長性を維持することにある。
【課題を解決するための手段】
【0012】
本発明は、前記課題を解決するため、タービン制御に関する制御対象の状態量を検出する複数の状態量検出手段と、前記制御対象に対する目標値を設定する目標値設定手段と、前記状態量検出手段が検出した状態量と前記目標値設定手段に設定された目標値の偏差を算出する複数の偏差算出手段と、これら複数の偏差算出手段が算出した偏差を零に抑制するための制御指令を算出する複数の制御指令生成手段と、該制御指令生成手段により生成された制御指令に応じて前記制御対象を駆動する駆動手段と、前記複数の偏差算出手段により算出された複数の偏差を相互に判断して異常の検出を行う異常検出手段と、該異常検出手段により異常が検出されない場合に前記複数の偏差の合わせ込みを行う合わせ込み処理手段と、前記異常検出手段により異常が検出された場合に、前記複数の駆動手段の少なくとも1つを制御系から切り離す制御系切り離し手段を有するタービン制御装置において、前記制御対象に含まれる機械機構の故障等により、前記状態量検出手段が検出した状態量に異常振動が発生した場合に、前記偏差算出手段による前記偏差の算出に与える前記異常振動の影響を抑制することで、前記制御系切り離し手段による制御系の切り離しを防止するための制御機能を備えたことを特徴とする。
【0013】
かかる構成によると、タービン制御系に異常振動の影響を抑制するための制御機能を備えたので、制御対象に含まれる機械機構の故障等により制御対象に異常振動が生じ、それによって状態量検出手段が検出した状態量が異常振動した場合にも、その状態量の異常振動が制御機能によって抑制される。よって、偏差算出手段による偏差の算出に異常振動の悪影響が波及せず、制御系の切り離しを防止できて、制御の冗長性を維持することができる。
【0014】
また本発明は、前記構成のタービン制御装置において、前記制御系の切り離しを防止するための制御機能として、前記状態量検出手段が検出した状態量に一次遅れを与えて前記偏差算出手段に入力する一次遅れ要素を備えたことを特徴とする。
【0015】
かかる構成によると、状態量検出手段と偏差算出手段との間に一次遅れ要素を備えるだけで良いので、冗長性に優れたタービン制御装置を簡易に構成することができる。
【0016】
また本発明は、前記構成のタービン制御装置において、前記一次遅れ要素の時定数をTi、タービン制御装置を用いて制御されるタービン制御系の応答可能時間をTr、前記タービン制御系に備えられる配管補償フィルタの時定数をTcとしたとき、前記一次遅れ要素の時定数Tiを、Tr≦Ti≦Tcの範囲に設定したことを特徴とする。
【0017】
一次遅れ要素の時定数Tiをタービン制御系の応答可能時間Trよりも小さくすると、一次遅れ要素によって機械機構の異常振動に起因する状態量の異常振動をコントローラ(1)、(2)、(3)が応答可能な範囲まで抑制できないので、一次遅れ要素を付加する意味が失われる。また、一次遅れ要素の時定数Tiをタービン制御系に備えられる配管補償フィルタの時定数Tcよりも大きくすると、配管補償フィルタを備える意味が失われるばかりでなく、コントローラ(1)、(2)、(3)からの出力信号に明確な立ち上がりが現れなくなるため、本来の制御を行うことが著しく困難になるか、不可能になる。したがって、一次遅れ要素の時定数TiをTr≦Ti≦Tcの範囲に設定することにより、タービン制御系の適正な制御が可能になる。
【発明の効果】
【0018】
本発明は、3重化並列冗長制御方式のタービン制御装置において、制御対象に含まれる機械機構の故障等により状態量検出手段が検出した状態量に異常振動が発生した場合に、偏差算出手段による前記偏差の算出に与える異常振動の影響を抑制して、制御系切り離し手段による制御系の切り離しを防止するための制御機能を備えたので、異常振動の発生時にも制御の冗長性を維持することができ、タービン制御の信頼性を高めることができる。
【図面の簡単な説明】
【0019】
【図1】実施形態に係るタービン制御装置のブロック図である。
【図2】実施形態に係るタービン制御装置の効果を示す図である。
【図3】従来例に係るタービン制御装置のブロック図である。
【図4】従来例に係るタービン制御装置に備えられるコントローラ及び弁駆動装置のブロック図である。
【図5】比例積分演算器で行われる合わせ込み処理の流れを示す流れ図である。
【図6】従来例に係るタービン制御装置の問題点を示す図である。
【発明を実施するための形態】
【0020】
以下、本発明に係るタービン制御装置の実施形態を、図1及び図2を用いて説明する。
【0021】
図1と図3との対比から明らかなように、実施形態に係るタービン制御装置も、基本的な構成に関しては、従来例に係るタービン制御装置と同じである。即ち、実施形態に係るタービン制御装置も、従来例に係るタービン制御装置と同様に、主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35、圧力設定器51、圧力調整器52、比例積分演算器53、弁開度指令54、及び加算器60、61、62から構成され、状態量検出手段としての主蒸気圧力検出器32、加減弁位置検出器34、バイパス弁位置検出器35の状態検出値を基に制御指令としての弁開度指令54を生成する。
【0022】
比例積分演算器53で行われる合わせ込み処理についても、従来例に係るタービン制御装置と同様であり、図4及び図5を用いて説明したように、まずステップS1で、各系のコントローラ(1)、(2)、(3)が独立して加算器62から比例積分演算器53への入力偏差量を演算し、ステップS2で、各系が求めた入力偏差量が予め設定された所定値εより大きいか否かを比較する。ステップS2で各系の偏差量が所定値εより大きい(YES)と判定した場合は、ステップS3に移行して制御能動域とし、ステップS2で各系の偏差量が所定値εより小さい(NO)と判定した場合は、ステップS4に移行して制御安定域とする。また、制御安定域にあると判断した場合は、ステップS5に移行して、各系のコントローラ(1)、(2)、(3)で比例積分演算器53の出力偏差量を監視し、ステップS6で、比例積分演算器53の出力偏差量が予め設定された所定値ωより大きいか否かを比較する。ステップS6で各系の偏差量が所定値ωより大きい(YES)と判定した場合は、ステップS7に移行して各系のコントローラ(1)、(2)、(3)における比例積分演算器53の出力に対してバランス処理を行い、ステップS6で各系の偏差量が所定値ωよりも小さい(NO)と判定した場合は、バランス処理を行わない。また、ステップS3で制御能動域とされた場合も、バランス処理を行わない。
【0023】
図1に示すように、本願に係るタービン制御装置は、加算器61の信号に一次遅れ80を掛けて加算器62に入力することを特徴とする。かかる構成によると、図2に示すように、仮に加算弁位置検出器34で検出された加減弁位置、又はバイパス弁位置検出器35で検出されたバイパス弁位置が機械機構の故障等によって異常振動したとしても、一次遅れ80を通過することによって異常振動が抑制されるので、比例積分演算器53の合わせ込み処理において、各コントローラに対する比例積分入力偏差量及び比例積分出力偏差量が所定値ε,ωよりも小さくなり、コントローラ(1)、(2)、(3)間で比例積分出力のバランス処理が行われる。よって、コントローラ(1)、(2)、(3)間での制御系の切り離しを防止でき、制御の冗長性を維持することができる。
【0024】
一次遅れ80の時定数は、当該一次遅れ要素80の時定数をTi、タービン制御装置を用いて制御されるタービン制御系の応答可能時間をTr、タービン制御系に備えられる配管補償フィルタ70の時定数をTcとしたとき、Tr≦Ti≦Tcの範囲に設定される。
【0025】
一次遅れ要素の時定数Tiをタービン制御系の応答可能時間Trよりも小さくすると、一次遅れ要素によって機械機構の異常振動に起因する状態量の異常振動をコントローラ(1)、(2)、(3)が応答可能な範囲まで抑制できないので、一次遅れ要素を付加する意味が失われる。また、一次遅れ要素の時定数Tiをタービン制御系に備えられる配管補償フィルタの時定数Tcよりも大きくすると、配管補償フィルタを備える意味が失われるばかりでなく、コントローラ(1)、(2)、(3)からの出力信号に明確な立ち上がりが現れなくなるため、本来の制御を行うことが著しく困難になるか、不可能になる。したがって、一次遅れ要素の時定数TiをTr≦Ti≦Tcの範囲に設定することにより、タービン制御系の適正な制御が可能になる。
【0026】
なお、前記実施形態においては、機械機構の異常振動に起因する制御系の切り離しを防止するための制御機能として一次遅れ要素80を備えたが、本発明の要旨はこれに限定されるものではなく、制御対象に含まれる機械機構の故障等により、状態量検出手段が検出した状態量に異常振動が発生した場合に、偏差算出手段による偏差の算出に与える異常振動の影響を抑制することで、制御系切り離し手段による制御系の切り離しを防止可能な任意の手段を備えることができる。
【産業上の利用可能性】
【0027】
本発明は、火力発電所や原子力発電所における主蒸気圧力の制御に利用できる。
【符号の説明】
【0028】
32…主蒸気圧力検出器
34…加減弁位置検出器
35…バイパス弁位置検出器
51…圧力設定器
52…圧力調整器
53…比例積分演算器
54…弁開度指令
60、61、62…加算器
70…配管補償フィルタ
80…一次遅れ
【特許請求の範囲】
【請求項1】
タービン制御に関する制御対象の状態量を検出する複数の状態量検出手段と、前記制御対象に対する目標値を設定する目標値設定手段と、前記状態量検出手段が検出した状態量と前記目標値設定手段に設定された目標値の偏差を算出する複数の偏差算出手段と、これら複数の偏差算出手段が算出した偏差を零に抑制するための制御指令を算出する複数の制御指令生成手段と、該制御指令生成手段により生成された制御指令に応じて前記制御対象を駆動する駆動手段と、前記複数の偏差算出手段により算出された複数の偏差を相互に判断して異常の検出を行う異常検出手段と、該異常検出手段により異常が検出されない場合に前記複数の偏差の合わせ込みを行う合わせ込み処理手段と、前記異常検出手段により異常が検出された場合に、前記複数の駆動手段の少なくとも1つを制御系から切り離す制御系切り離し手段を有するタービン制御装置において、
前記制御対象に含まれる機械機構の故障等により、前記状態量検出手段が検出した状態量に異常振動が発生した場合に、前記偏差算出手段による前記偏差の算出に与える前記異常振動の影響を抑制することで、前記制御系切り離し手段による制御系の切り離しを防止するための制御機能を備えたことを特徴とするタービン制御装置。
【請求項2】
前記制御系の切り離しを防止するための制御機能として、前記状態量検出手段が検出した状態量に一次遅れを与えて前記偏差算出手段に入力する一次遅れ要素を備えたことを特徴とする請求項1に記載のタービン制御装置。
【請求項3】
前記一次遅れ要素の時定数をTi、タービン制御装置を用いて制御されるタービン制御系の応答可能時間をTr、前記タービン制御系に備えられる配管補償フィルタの時定数をTcとしたとき、前記一次遅れ要素の時定数Tiを、Tr≦Ti≦Tcの範囲に設定したことを特徴とする請求項2に記載のタービン制御装置。
【請求項1】
タービン制御に関する制御対象の状態量を検出する複数の状態量検出手段と、前記制御対象に対する目標値を設定する目標値設定手段と、前記状態量検出手段が検出した状態量と前記目標値設定手段に設定された目標値の偏差を算出する複数の偏差算出手段と、これら複数の偏差算出手段が算出した偏差を零に抑制するための制御指令を算出する複数の制御指令生成手段と、該制御指令生成手段により生成された制御指令に応じて前記制御対象を駆動する駆動手段と、前記複数の偏差算出手段により算出された複数の偏差を相互に判断して異常の検出を行う異常検出手段と、該異常検出手段により異常が検出されない場合に前記複数の偏差の合わせ込みを行う合わせ込み処理手段と、前記異常検出手段により異常が検出された場合に、前記複数の駆動手段の少なくとも1つを制御系から切り離す制御系切り離し手段を有するタービン制御装置において、
前記制御対象に含まれる機械機構の故障等により、前記状態量検出手段が検出した状態量に異常振動が発生した場合に、前記偏差算出手段による前記偏差の算出に与える前記異常振動の影響を抑制することで、前記制御系切り離し手段による制御系の切り離しを防止するための制御機能を備えたことを特徴とするタービン制御装置。
【請求項2】
前記制御系の切り離しを防止するための制御機能として、前記状態量検出手段が検出した状態量に一次遅れを与えて前記偏差算出手段に入力する一次遅れ要素を備えたことを特徴とする請求項1に記載のタービン制御装置。
【請求項3】
前記一次遅れ要素の時定数をTi、タービン制御装置を用いて制御されるタービン制御系の応答可能時間をTr、前記タービン制御系に備えられる配管補償フィルタの時定数をTcとしたとき、前記一次遅れ要素の時定数Tiを、Tr≦Ti≦Tcの範囲に設定したことを特徴とする請求項2に記載のタービン制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−113136(P2013−113136A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257705(P2011−257705)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]