
ターボジェットエンジンのディスクの周状の凹所の表面をフーコー電流を使用してチェックするためのプローブ
本発明は、ターボジェットエンジンのディスク(1)に形成された周状の凹所(2)の表面をフーコー電流を使用してチェックするためのプローブ(6)に関する。プローブは、支承部(8)に取り付けられたロッド(7)と、ロッド(7)の動きに追従し、チェックを実行すべく前記周状の凹所(2)に挿入される第1のマルチ素子センサ(9)と、第2のマルチ素子センサ(9)とを含む。2つのマルチ素子センサ(9)が、背中合わせに配置され、プローブ(6)のロッド(7)が、2つのマルチ素子センサ(9)を前記凹所(2)に挿入すべく自身の軸を中心にして回転するように取り付けられている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ターボジェットのディスクの周溝の表面の異常および不均一を渦電流によって検査するためのプローブに関する。
【背景技術】
【0002】
ターボジェットのディスクの周溝は、一連の羽根を受け入れるように意図されており、ターボジェットの運転時に、特に凹状の角張った形状の面(以下では、溝の「側面」と称する)において、高水準の応力に曝される。結果として、この種の溝は、きわめて規則的な検査を必要とする。側面へのアクセス性が良好でないことから、それらの表面の状態を、渦電流による検査を実行することによって確認することが、一般的な実務である。この種の検査は、調査対象の表面を、電磁界を生じさせることによって検査対象の部位に渦電流を生じさせるセンサが装備されたプローブによって走査することからなる。実務においては、通常は、部品が回転させられる一方で、プローブは、支持部に固定されたままである。溝の表面が異常を有する場合、渦電流束が変化し、センサが変化に対応する電気信号を生成する。信号の振幅が、検出された表面の異常の大きさに比例している。しかしながら、この比例が忠実なままであるように保証するために、検査対象の表面と渦電流プローブとの間の接触を、常に維持する必要がある。
【0003】
単一素子のセンサを軸部の端部に取り付けて構成され、軸部を軸部の支持部によってターボジェットのディスクの軸方向および半径方向に沿って動かすことができるシュープローブが、すでに知られている。この形式のプローブでは、プローブを検査対象の輪郭に沿って段階的に動かす必要があり、溝の全表面を走査するために、プローブをディスクの軸方向に動かすごとに、ディスクまたはプローブを回転運動させる必要がある。単一素子のセンサが、溝に挿入され、検査対象の表面に接触させられ、次いで部品が完全に1回転させられ、溝の全周が帯状に検査される。次いで、この作業が数回、検査対象の表面における単一素子のセンサの位置をその都度変えつつ繰り返され、溝の表面全体が走査される。単一素子のセンサが非対称であるため、溝の一方の側面を検査した後で、反対側を検査するためにセンサを回転させる必要がある。溝の表面状態の評価を可能にする結果が、単一素子のセンサを使用して実行される種々の測定の結果を増加させることによって得られる。
【0004】
溝の表面の全体の検査に必要な測定の回数を少なくするために、プローブの単一素子のセンサを、溝の一方の側面の輪郭に有利に一致する形状のマルチ素子センサで置き換えることが、提案されている。これにより、溝全体を、わずか2回の作業(溝の各々の側面について1回転ずつ、2回の作業の間でセンサの向きを変える)で検査することができる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
これら2つのシステムは、いくつかの欠点を有している。多数回の測定および計算、ならびにセンサを検査対象の表面に当接して位置させることの困難性が、結果の精度を低下させている。さらに、知られているシステムが溝の片面のみの検査を可能にしているかぎりにおいて、軸部の曲がりに関係した問題が時間とともに現れ、マルチ素子センサが検査対象の表面に対して良好に向けられなくなることで、測定結果が誤ったものになる。
【0006】
本発明は、特に、マルチ素子センサを有するプローブの改善に関する。
【0007】
本発明は、ターボジェットのディスクの周溝の表面の渦電流検査に必要な作業の回数を抑えることを提案する。本発明の他の目的は、プローブを溝の内側に良好に配置できるようにすることにある。結果として、本発明は、検査の時間を顕著に短縮し、結果の精度を向上させる役に立つ。
【課題を解決するための手段】
【0008】
第1に、本発明は、ターボジェットのディスクに形成された周溝の表面の渦電流モニタリングを行うために、支持部に取り付けられた軸部と、軸部と一緒に動くように束縛され、検査を実行すべく前記周溝に挿入されるように意図された第1のマルチ素子センサとを備えているプローブであって、第2のマルチ素子センサをさらに備えており、2つのマルチ素子センサが背中合わせに配置され、前記軸部が、2つのマルチ素子センサを前記溝に挿入できるよう、自身の軸を中心にして枢動するように取り付けられていることを特徴とするプローブを提供する。
【0009】
各々のマルチ素子センサが、溝のそれぞれの側面に接触する。これらのマルチ素子センサは、検査対象の表面の損傷の程度に対応する高周波信号をもたらす複数の素子を備えている。これらの信号が、リアルタイムで取得され、デジタル渦電流発生器が、それらの送信、受信、および変調に使用される。次いで、これらの信号が、作業者による解釈を可能にするために、ソフトウェア処理によって画像に変換される。
【0010】
背中合わせに配置された2つのマルチ素子センサからなる組は、当然ながら、溝への入り口の幅よりも大きい幅を有する。プローブを溝に挿入できるよう、軸部が、例えばボール摺動路およびばねのシステムによって支持部に回転可能に取り付けられる。
【0011】
有利には、2つのマルチ素子センサが、マルチ素子センサと対向する検査対象の表面との間の良好な接触をもたらすために、反対の方向に弾性的に付勢されている。
【0012】
好ましくは、少なくとも1つのばねが、2つのマルチ素子センサの間に介装されている。
【0013】
本発明の好ましい提供形態によれば、各々のマルチ素子センサが、検査対象の溝の面の輪郭に一致する形状である。
【0014】
本発明の別の好ましい提供形態によれば、2つのマルチ素子センサが、背中合わせに保持され、摺動機構によって軸部に接続されている。
【0015】
第2に、本発明は、ターボジェットのディスクに形成された周溝の表面の渦電流検査を、上述したようなプローブによって行うための方法であって:
a)2つのセンサをセンサの共通の軸がディスクの軸に垂直に延びるようにして溝の開口に位置合わせするステップと、
b)2つのマルチ素子センサが前記溝に挿入されるように、プローブを溝の内部に向かってディスクの半径方向に動かすステップと、
c)マルチ素子センサが検査対象の溝の側面に接するように、軸部を90°の角度だけ回転させるステップと、
d)周溝の全表面を走査するステップとを含むことを特徴とする方法を提供する。
【0016】
有利には、ステップd)において、プローブが動かぬままであって、ディスクが、360°の角度だけ回転させられる。
【0017】
本発明によれば、プローブのただ1回の走査の回転で、すべてのデータを取得することが可能である。溝の2つの側面が、2つのマルチ素子センサによって同時に検査される。さらに、背中合わせに配置された2つのセンサの間に配置された1つ以上の戻しばねによって、マルチ素子センサとディスクとの間に良好な接触を維持することができる。検査の作業の数を少なくすることによって、本発明のプローブは、測定結果への人的要因の影響を少なくし、誤差の恐れを少なくする。さらに、本発明は、プローブと溝の側面との間に良好な接触をもたらすことによって、測定結果を正確にすることができる。最後に、検査対象の形状へのアクセスが良好でないにもかかわらず、背中合わせに配置されたセンサの間の自動的かつ自発的な平衡ゆえに、センサと検査対象の表面との間の接触が失われることになりかねない軸部の曲がりの現象を、防止することができる。
【0018】
本発明を限定するものではない例として提示される以下の実施形態の説明を検討することで、本発明がよりよく理解され、本発明の利点がさらに明らかになる。説明においては、添付の図面が参照される。
【図面の簡単な説明】
【0019】
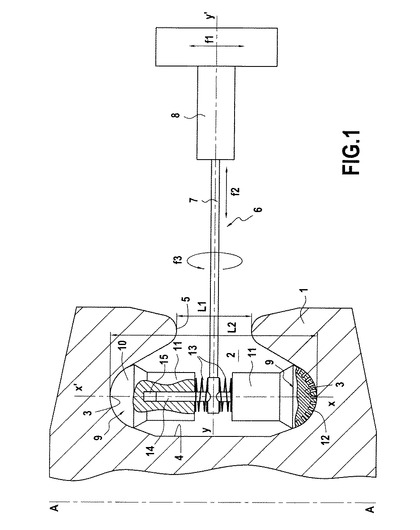
【図1】ターボジェットのディスクの周溝の一部分の断面図であり、本発明のプローブが挿入されて図示されている。
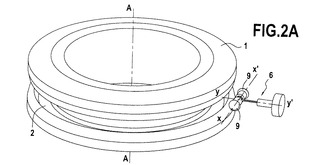
【図2A】周溝の表面を検査するための本発明の方法の連続する工程を示している。
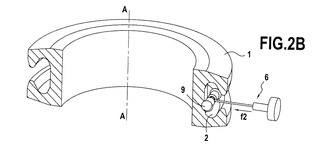
【図2B】周溝の表面を検査するための本発明の方法の連続する工程を示している。
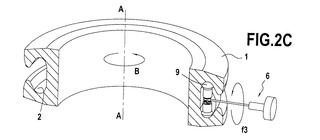
【図2C】周溝の表面を検査するための本発明の方法の連続する工程を示している。
【発明を実施するための形態】
【0020】
図1は、一連の羽根を収容するための周溝2が機械加工されているターボジェットのディスク1の一部分を示している。溝は、軸A−Aを中心とする実質的に円柱形の中央面4と、凹環状の2つの側面3とを有している。溝2は、軸方向に測定される幅L1の環状の開口5を介して、外へと開いている。開口5の幅L1は、軸方向に測定され、すなわち側面3の間で測定される溝2の最大幅L2よりも小さい。
【0021】
本発明のプローブを、図1を参照して説明する。プローブ6が、軸部7、支持部8、および2つのマルチ素子センサ9によって構成されている。矢印f1、f2、およびf3が、図示されていないボール摺動路およびばねによって決定される軸部7の自由度を表わしている。これらの自由度は、ターボジェットのディスクの基準系を参照して以下のように確立される。詳しくは、矢印f1が、ディスクの軸に沿って動かされる軸部に相当し、矢印f2が、半径方向に動かされる軸部に相当する一方で、f3は、ディスク1の半径の方向に延びる自身の軸y−y’を中心にして回転する軸部を指している。軸部7の反対端に、背中合わせに配置された2つのマルチ素子センサ9が、軸部の軸y−y’を中心にして対称に取り付けられている。2つのセンサの対称性は、プローブ6の自分自身での平衡に貢献し、軸部の曲がりという現象を回避して、センサ9と溝の検査対象の面3との間の接触を良好に維持できるようにする。各々のセンサ9は、接触部10および取り付け部11によって構成されている。接触部10は、走査対象の側面3の輪郭に実質的に一致する輪郭を有している。図1に示されるように、接触部10は、接触相手の表面の損傷の程度に対応する高周波信号をもたらす複数の素子12を有している。取り付け部11は、センサ9を軸部7に対して取り付けるための手段を受けるように意図されている。図1において、センサ9は、2つの戻しばね13を介して軸部7に接続されている。2つのセンサ9を、軸部7の軸y−y’に垂直な平面内で背中合わせに保つために、摺動ガイド14も設けられている。このガイド14は、それぞれのセンサ9の取り付け部11に形成された穴15において摺動する2本の棒によって構成されており、2つのセンサ9の穴15が、互いに一直線に配置されている。
【0022】
上述のプローブによって実現される渦電流検査方法を、図2Aから図2Cを参照して以下で説明する。
【0023】
図2Aは、検査すべき表面状態を有する溝2が形成されてなるターボジェットのディスク1を示している。プローブ6が、プローブの軸が周溝2の中央面に位置するまで、方向f1に動かされる。次いで、プローブは、背中合わせに配置された2つのセンサ9が両方とも溝2の開口に面して位置し、2つのセンサ9の共通の軸x−x’がディスクの軸A−Aに垂直になるように、矢印f3の方向に回転させられる。
【0024】
次いで、図2Bに示されるように、プローブ6の2つのセンサ9が、軸部7を半径方向f2に動かすことによって、溝2に挿入される。
【0025】
図2Cが、センサ9が溝2の側面3に当接して位置していることを示している。この目的で、軸部7が、2つのセンサの共通の軸x−x’がターボジェットのディスク1の軸A−Aに平行になるように、自身の軸y−y’を中心にして90°の角度だけ回転させられる。軸部7が回転するとき、センサ9は、ディスク1の軸A−A上に正しく位置するよりも先に、溝2の側面3に当接する。この瞬間から、センサ9が最終的な位置に達するまで、戻しばね13が、センサ9を溝2の側面3に押し当てつつ圧縮される。戻しばねが、センサ9と溝2の表面3との間の良好な接触の維持に貢献し、したがって、表面の損傷の程度に正確に比例する電気信号の取得に貢献する。
【0026】
図2Cの矢印Bは、溝2の走査の作業を示している。好ましくは、プローブ6が動かぬように保たれる一方で、ターボジェットのディスク1が、自身の軸A−Aを中心にして回転する。
【0027】
溝2を周状に走査する際に、両方のセンサ9が、溝2の側面3の損傷の程度に比例するそれぞれの高周波信号をもたらす。これらの信号が、後にフィルタ処理され、得られた結果を表わす作業者による使用に適した画像の形態で、画面に表示される。
【技術分野】
【0001】
本発明は、ターボジェットのディスクの周溝の表面の異常および不均一を渦電流によって検査するためのプローブに関する。
【背景技術】
【0002】
ターボジェットのディスクの周溝は、一連の羽根を受け入れるように意図されており、ターボジェットの運転時に、特に凹状の角張った形状の面(以下では、溝の「側面」と称する)において、高水準の応力に曝される。結果として、この種の溝は、きわめて規則的な検査を必要とする。側面へのアクセス性が良好でないことから、それらの表面の状態を、渦電流による検査を実行することによって確認することが、一般的な実務である。この種の検査は、調査対象の表面を、電磁界を生じさせることによって検査対象の部位に渦電流を生じさせるセンサが装備されたプローブによって走査することからなる。実務においては、通常は、部品が回転させられる一方で、プローブは、支持部に固定されたままである。溝の表面が異常を有する場合、渦電流束が変化し、センサが変化に対応する電気信号を生成する。信号の振幅が、検出された表面の異常の大きさに比例している。しかしながら、この比例が忠実なままであるように保証するために、検査対象の表面と渦電流プローブとの間の接触を、常に維持する必要がある。
【0003】
単一素子のセンサを軸部の端部に取り付けて構成され、軸部を軸部の支持部によってターボジェットのディスクの軸方向および半径方向に沿って動かすことができるシュープローブが、すでに知られている。この形式のプローブでは、プローブを検査対象の輪郭に沿って段階的に動かす必要があり、溝の全表面を走査するために、プローブをディスクの軸方向に動かすごとに、ディスクまたはプローブを回転運動させる必要がある。単一素子のセンサが、溝に挿入され、検査対象の表面に接触させられ、次いで部品が完全に1回転させられ、溝の全周が帯状に検査される。次いで、この作業が数回、検査対象の表面における単一素子のセンサの位置をその都度変えつつ繰り返され、溝の表面全体が走査される。単一素子のセンサが非対称であるため、溝の一方の側面を検査した後で、反対側を検査するためにセンサを回転させる必要がある。溝の表面状態の評価を可能にする結果が、単一素子のセンサを使用して実行される種々の測定の結果を増加させることによって得られる。
【0004】
溝の表面の全体の検査に必要な測定の回数を少なくするために、プローブの単一素子のセンサを、溝の一方の側面の輪郭に有利に一致する形状のマルチ素子センサで置き換えることが、提案されている。これにより、溝全体を、わずか2回の作業(溝の各々の側面について1回転ずつ、2回の作業の間でセンサの向きを変える)で検査することができる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
これら2つのシステムは、いくつかの欠点を有している。多数回の測定および計算、ならびにセンサを検査対象の表面に当接して位置させることの困難性が、結果の精度を低下させている。さらに、知られているシステムが溝の片面のみの検査を可能にしているかぎりにおいて、軸部の曲がりに関係した問題が時間とともに現れ、マルチ素子センサが検査対象の表面に対して良好に向けられなくなることで、測定結果が誤ったものになる。
【0006】
本発明は、特に、マルチ素子センサを有するプローブの改善に関する。
【0007】
本発明は、ターボジェットのディスクの周溝の表面の渦電流検査に必要な作業の回数を抑えることを提案する。本発明の他の目的は、プローブを溝の内側に良好に配置できるようにすることにある。結果として、本発明は、検査の時間を顕著に短縮し、結果の精度を向上させる役に立つ。
【課題を解決するための手段】
【0008】
第1に、本発明は、ターボジェットのディスクに形成された周溝の表面の渦電流モニタリングを行うために、支持部に取り付けられた軸部と、軸部と一緒に動くように束縛され、検査を実行すべく前記周溝に挿入されるように意図された第1のマルチ素子センサとを備えているプローブであって、第2のマルチ素子センサをさらに備えており、2つのマルチ素子センサが背中合わせに配置され、前記軸部が、2つのマルチ素子センサを前記溝に挿入できるよう、自身の軸を中心にして枢動するように取り付けられていることを特徴とするプローブを提供する。
【0009】
各々のマルチ素子センサが、溝のそれぞれの側面に接触する。これらのマルチ素子センサは、検査対象の表面の損傷の程度に対応する高周波信号をもたらす複数の素子を備えている。これらの信号が、リアルタイムで取得され、デジタル渦電流発生器が、それらの送信、受信、および変調に使用される。次いで、これらの信号が、作業者による解釈を可能にするために、ソフトウェア処理によって画像に変換される。
【0010】
背中合わせに配置された2つのマルチ素子センサからなる組は、当然ながら、溝への入り口の幅よりも大きい幅を有する。プローブを溝に挿入できるよう、軸部が、例えばボール摺動路およびばねのシステムによって支持部に回転可能に取り付けられる。
【0011】
有利には、2つのマルチ素子センサが、マルチ素子センサと対向する検査対象の表面との間の良好な接触をもたらすために、反対の方向に弾性的に付勢されている。
【0012】
好ましくは、少なくとも1つのばねが、2つのマルチ素子センサの間に介装されている。
【0013】
本発明の好ましい提供形態によれば、各々のマルチ素子センサが、検査対象の溝の面の輪郭に一致する形状である。
【0014】
本発明の別の好ましい提供形態によれば、2つのマルチ素子センサが、背中合わせに保持され、摺動機構によって軸部に接続されている。
【0015】
第2に、本発明は、ターボジェットのディスクに形成された周溝の表面の渦電流検査を、上述したようなプローブによって行うための方法であって:
a)2つのセンサをセンサの共通の軸がディスクの軸に垂直に延びるようにして溝の開口に位置合わせするステップと、
b)2つのマルチ素子センサが前記溝に挿入されるように、プローブを溝の内部に向かってディスクの半径方向に動かすステップと、
c)マルチ素子センサが検査対象の溝の側面に接するように、軸部を90°の角度だけ回転させるステップと、
d)周溝の全表面を走査するステップとを含むことを特徴とする方法を提供する。
【0016】
有利には、ステップd)において、プローブが動かぬままであって、ディスクが、360°の角度だけ回転させられる。
【0017】
本発明によれば、プローブのただ1回の走査の回転で、すべてのデータを取得することが可能である。溝の2つの側面が、2つのマルチ素子センサによって同時に検査される。さらに、背中合わせに配置された2つのセンサの間に配置された1つ以上の戻しばねによって、マルチ素子センサとディスクとの間に良好な接触を維持することができる。検査の作業の数を少なくすることによって、本発明のプローブは、測定結果への人的要因の影響を少なくし、誤差の恐れを少なくする。さらに、本発明は、プローブと溝の側面との間に良好な接触をもたらすことによって、測定結果を正確にすることができる。最後に、検査対象の形状へのアクセスが良好でないにもかかわらず、背中合わせに配置されたセンサの間の自動的かつ自発的な平衡ゆえに、センサと検査対象の表面との間の接触が失われることになりかねない軸部の曲がりの現象を、防止することができる。
【0018】
本発明を限定するものではない例として提示される以下の実施形態の説明を検討することで、本発明がよりよく理解され、本発明の利点がさらに明らかになる。説明においては、添付の図面が参照される。
【図面の簡単な説明】
【0019】
【図1】ターボジェットのディスクの周溝の一部分の断面図であり、本発明のプローブが挿入されて図示されている。
【図2A】周溝の表面を検査するための本発明の方法の連続する工程を示している。
【図2B】周溝の表面を検査するための本発明の方法の連続する工程を示している。
【図2C】周溝の表面を検査するための本発明の方法の連続する工程を示している。
【発明を実施するための形態】
【0020】
図1は、一連の羽根を収容するための周溝2が機械加工されているターボジェットのディスク1の一部分を示している。溝は、軸A−Aを中心とする実質的に円柱形の中央面4と、凹環状の2つの側面3とを有している。溝2は、軸方向に測定される幅L1の環状の開口5を介して、外へと開いている。開口5の幅L1は、軸方向に測定され、すなわち側面3の間で測定される溝2の最大幅L2よりも小さい。
【0021】
本発明のプローブを、図1を参照して説明する。プローブ6が、軸部7、支持部8、および2つのマルチ素子センサ9によって構成されている。矢印f1、f2、およびf3が、図示されていないボール摺動路およびばねによって決定される軸部7の自由度を表わしている。これらの自由度は、ターボジェットのディスクの基準系を参照して以下のように確立される。詳しくは、矢印f1が、ディスクの軸に沿って動かされる軸部に相当し、矢印f2が、半径方向に動かされる軸部に相当する一方で、f3は、ディスク1の半径の方向に延びる自身の軸y−y’を中心にして回転する軸部を指している。軸部7の反対端に、背中合わせに配置された2つのマルチ素子センサ9が、軸部の軸y−y’を中心にして対称に取り付けられている。2つのセンサの対称性は、プローブ6の自分自身での平衡に貢献し、軸部の曲がりという現象を回避して、センサ9と溝の検査対象の面3との間の接触を良好に維持できるようにする。各々のセンサ9は、接触部10および取り付け部11によって構成されている。接触部10は、走査対象の側面3の輪郭に実質的に一致する輪郭を有している。図1に示されるように、接触部10は、接触相手の表面の損傷の程度に対応する高周波信号をもたらす複数の素子12を有している。取り付け部11は、センサ9を軸部7に対して取り付けるための手段を受けるように意図されている。図1において、センサ9は、2つの戻しばね13を介して軸部7に接続されている。2つのセンサ9を、軸部7の軸y−y’に垂直な平面内で背中合わせに保つために、摺動ガイド14も設けられている。このガイド14は、それぞれのセンサ9の取り付け部11に形成された穴15において摺動する2本の棒によって構成されており、2つのセンサ9の穴15が、互いに一直線に配置されている。
【0022】
上述のプローブによって実現される渦電流検査方法を、図2Aから図2Cを参照して以下で説明する。
【0023】
図2Aは、検査すべき表面状態を有する溝2が形成されてなるターボジェットのディスク1を示している。プローブ6が、プローブの軸が周溝2の中央面に位置するまで、方向f1に動かされる。次いで、プローブは、背中合わせに配置された2つのセンサ9が両方とも溝2の開口に面して位置し、2つのセンサ9の共通の軸x−x’がディスクの軸A−Aに垂直になるように、矢印f3の方向に回転させられる。
【0024】
次いで、図2Bに示されるように、プローブ6の2つのセンサ9が、軸部7を半径方向f2に動かすことによって、溝2に挿入される。
【0025】
図2Cが、センサ9が溝2の側面3に当接して位置していることを示している。この目的で、軸部7が、2つのセンサの共通の軸x−x’がターボジェットのディスク1の軸A−Aに平行になるように、自身の軸y−y’を中心にして90°の角度だけ回転させられる。軸部7が回転するとき、センサ9は、ディスク1の軸A−A上に正しく位置するよりも先に、溝2の側面3に当接する。この瞬間から、センサ9が最終的な位置に達するまで、戻しばね13が、センサ9を溝2の側面3に押し当てつつ圧縮される。戻しばねが、センサ9と溝2の表面3との間の良好な接触の維持に貢献し、したがって、表面の損傷の程度に正確に比例する電気信号の取得に貢献する。
【0026】
図2Cの矢印Bは、溝2の走査の作業を示している。好ましくは、プローブ6が動かぬように保たれる一方で、ターボジェットのディスク1が、自身の軸A−Aを中心にして回転する。
【0027】
溝2を周状に走査する際に、両方のセンサ9が、溝2の側面3の損傷の程度に比例するそれぞれの高周波信号をもたらす。これらの信号が、後にフィルタ処理され、得られた結果を表わす作業者による使用に適した画像の形態で、画面に表示される。
【特許請求の範囲】
【請求項1】
ターボジェットのディスク(1)に形成された周溝(2)の表面の渦電流モニタリングを行うために、支持部(8)に取り付けられた軸部(7)と、軸部(7)と一緒に動くように束縛され、検査を実行すべく前記周溝(2)に挿入されるように意図された第1のマルチ素子センサ(9)とを備えているプローブ(6)であって、第2のマルチ素子センサ(9)をさらに備えており、2つのマルチ素子センサ(9)が背中合わせに配置され、前記軸部(7)が、2つのマルチ素子センサ(9)を前記溝(2)に挿入できるよう、自身の軸(y−y’)を中心にして枢動するように取り付けられていることを特徴とする、プローブ。
【請求項2】
2つのマルチ素子センサ(9)が、マルチ素子センサ(9)と対向する検査対象の表面(3)との間の良好な接触をもたらすために、反対の方向に弾性的に付勢されていることを特徴とする、請求項1に記載のプローブ。
【請求項3】
少なくとも1つのばね(13)が、2つのマルチ素子センサ(9)の間に介装されていることを特徴とする、請求項2に記載のプローブ。
【請求項4】
各々のマルチ素子センサ(9)が、検査対象の溝(2)の面(3)の輪郭に一致する形状であることを特徴とする、請求項1から3のいずれか一項に記載のプローブ。
【請求項5】
2つのマルチ素子センサ(9)が、背中合わせに保持され、摺動機構(14)によって軸部(7)に接続されていることを特徴とする、請求項1から4のいずれか一項に記載のプローブ。
【請求項6】
ターボジェットのディスク(1)に形成された周溝(2)の表面の渦電流検査を、請求項1に記載のプローブ(6)によって行う方法であって、
a)2つのセンサ(9)をセンサの共通の軸(x−x’)がディスク(1)の軸(A−A)に垂直に延びるようにして溝の開口(5)に位置合わせするステップと、
b)2つのマルチ素子センサ(9)が前記溝(2)に挿入されるように、プローブ(6)を溝(2)の内部に向かって半径方向(f2)に動かすステップと、
c)マルチ素子センサ(9)が検査対象の溝(2)の側面(3)に接するように、軸部(7)を90°の角度だけ回転させるステップと、
d)周溝(2)の全表面を走査するステップとを含むことを特徴とする、方法。
【請求項7】
ステップd)において、プローブ(6)が動かぬままであって、ディスク(1)が、360°の角度だけ回転させられることを特徴とする、請求項6に記載の方法。
【請求項1】
ターボジェットのディスク(1)に形成された周溝(2)の表面の渦電流モニタリングを行うために、支持部(8)に取り付けられた軸部(7)と、軸部(7)と一緒に動くように束縛され、検査を実行すべく前記周溝(2)に挿入されるように意図された第1のマルチ素子センサ(9)とを備えているプローブ(6)であって、第2のマルチ素子センサ(9)をさらに備えており、2つのマルチ素子センサ(9)が背中合わせに配置され、前記軸部(7)が、2つのマルチ素子センサ(9)を前記溝(2)に挿入できるよう、自身の軸(y−y’)を中心にして枢動するように取り付けられていることを特徴とする、プローブ。
【請求項2】
2つのマルチ素子センサ(9)が、マルチ素子センサ(9)と対向する検査対象の表面(3)との間の良好な接触をもたらすために、反対の方向に弾性的に付勢されていることを特徴とする、請求項1に記載のプローブ。
【請求項3】
少なくとも1つのばね(13)が、2つのマルチ素子センサ(9)の間に介装されていることを特徴とする、請求項2に記載のプローブ。
【請求項4】
各々のマルチ素子センサ(9)が、検査対象の溝(2)の面(3)の輪郭に一致する形状であることを特徴とする、請求項1から3のいずれか一項に記載のプローブ。
【請求項5】
2つのマルチ素子センサ(9)が、背中合わせに保持され、摺動機構(14)によって軸部(7)に接続されていることを特徴とする、請求項1から4のいずれか一項に記載のプローブ。
【請求項6】
ターボジェットのディスク(1)に形成された周溝(2)の表面の渦電流検査を、請求項1に記載のプローブ(6)によって行う方法であって、
a)2つのセンサ(9)をセンサの共通の軸(x−x’)がディスク(1)の軸(A−A)に垂直に延びるようにして溝の開口(5)に位置合わせするステップと、
b)2つのマルチ素子センサ(9)が前記溝(2)に挿入されるように、プローブ(6)を溝(2)の内部に向かって半径方向(f2)に動かすステップと、
c)マルチ素子センサ(9)が検査対象の溝(2)の側面(3)に接するように、軸部(7)を90°の角度だけ回転させるステップと、
d)周溝(2)の全表面を走査するステップとを含むことを特徴とする、方法。
【請求項7】
ステップd)において、プローブ(6)が動かぬままであって、ディスク(1)が、360°の角度だけ回転させられることを特徴とする、請求項6に記載の方法。
【図1】

【図2A】
【図2B】
【図2C】
【図2A】
【図2B】
【図2C】
【公表番号】特表2011−521219(P2011−521219A)
【公表日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願番号】特願2011−508983(P2011−508983)
【出願日】平成21年5月13日(2009.5.13)
【国際出願番号】PCT/FR2009/050877
【国際公開番号】WO2009/147351
【国際公開日】平成21年12月10日(2009.12.10)
【出願人】(505277691)スネクマ (567)
【Fターム(参考)】
【公表日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願日】平成21年5月13日(2009.5.13)
【国際出願番号】PCT/FR2009/050877
【国際公開番号】WO2009/147351
【国際公開日】平成21年12月10日(2009.12.10)
【出願人】(505277691)スネクマ (567)
【Fターム(参考)】
[ Back to top ]