
ターボ機械の弁を制御する方法及びシステム
【課題】蒸気タービンに流入する蒸気流を制限する方法及びシステムを提供する。
【解決手段】方法500及びシステム100により、蒸気タービン102の段110、112間で分配される蒸気流を意図的に不平衡状態にできる。蒸気タービン102は少なくとも、第1段112、第2段114、及び各段内に設けられたロータ115を備える。方法500では、第1段110に関連付けられた第1弁118、及び第2段112に関連付けられた第2弁120の基準ストロークを提供する、速度/負荷コマンド510等を受信する。方法500では更に、速度/負荷コマンドに応じて基準ストロークを制限する操作パラメータを決定する。操作パラメータにより、速度/負荷コマンドとは無関係に、蒸気タービン102の各段に許容可能な蒸気流を決定できる。
【解決手段】方法500及びシステム100により、蒸気タービン102の段110、112間で分配される蒸気流を意図的に不平衡状態にできる。蒸気タービン102は少なくとも、第1段112、第2段114、及び各段内に設けられたロータ115を備える。方法500では、第1段110に関連付けられた第1弁118、及び第2段112に関連付けられた第2弁120の基準ストロークを提供する、速度/負荷コマンド510等を受信する。方法500では更に、速度/負荷コマンドに応じて基準ストロークを制限する操作パラメータを決定する。操作パラメータにより、速度/負荷コマンドとは無関係に、蒸気タービン102の各段に許容可能な蒸気流を決定できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主にターボ機械に関し、特に、蒸気タービンの段に流入する蒸気流を個別に制限するための方法及びシステムに関する。
【背景技術】
【0002】
蒸気タービンは、発電所、発熱システム、海洋推進システム、及びその他の熱的及び電力的な用途に、一般的に使用されている。蒸気タービンは通常、所定の圧力範囲内で動作する、少なくとも1つの段を含む。これには、高圧(HP)段と、再加熱段又は中圧(IP)段が含まれる。これらの段に収容された回転要素は通例、軸シャフトに取り付けられる。一般的に、制御弁及びインターセプト弁が、HP段及びIP段を通る蒸気流をそれぞれ制御する。
【0003】
蒸気タービンの通常運転には、3つの異なる段階(始動、負荷、停止)がある。始動段階は、全ての段に蒸気が行き渡る迄の、回転要素が揺動し始める運転段階の初期と考えられる。一般的に、始動段階は、特定の負荷において終了するものではない。負荷段階は、蒸気タービンの出力がほぼ所望の負荷(定格負荷等)になる迄、段に流入する蒸気の量が増加する運転段階と考えられる。停止段階は、蒸気タービン負荷が減少し、各段への蒸気流が徐々になくなり、回転要素が取り付けられたロータが減速して回転ギヤ速度になる運転段階と考えられる。
【0004】
蒸気タービンのオペレータは、負荷段階の大部分において流量平衡ストラテジーを使用することがある。このストラテジーでは、各段に等量の蒸気流を供給しようとする。ここで、制御システムは、関連する弁を位置決めするコマンドを用いて蒸気流を制御する。その他の制御スキームは、始動と停止の運転段階で共通して使用される。
【0005】
カスケードバイパスシステムと一体化された蒸気タービンの始動時は、制御弁が実質的に閉鎖され、蒸気がバイパス弁を介してインターセプト弁に迂回する。インターセプト弁では、蒸気タービンの初期速度/負荷の制御を行える。次に、所定の負荷範囲において、インターセプト弁が付勢されて開いた状態で、制御弁により主に速度/負荷の制御が行われる。その他の操作の結果、HP段への蒸気流量が著しく減少する一方で、IP段に大きな負荷がかかる。結果的に、流量を不平衡にすることで、ロータへの正味推力を増大させることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第5361585号明細書
【発明の概要】
【0007】
始動、負荷、及び停止の運転段階の間の蒸気タービンを制御する周知の方法には、幾つか問題がある。現時点で周知の方法は、不都合に古典的かもしれない。これらの方法では、操作柔軟性が低下し、大型の機械部品を要することがあるため、蒸気タービンが供給する正味出力が減少する可能性がある。したがって、蒸気タービンの操作柔軟性を向上させる方法及びシステムが望ましい。
【0008】
本発明の一実施例により、ターボ機械に流入する蒸気流を制限する方法500を提供する。方法500は、第1段112及び第2段114の内部に設けられたロータ115を備えるターボ機械102を準備するステップであって、ロータ115の周りの流路は、蒸気を第1段112及び第2段114の間で流体的に連通させるステップと、第1段112に流入する蒸気流を制御するように構成された第1弁116と第2段114に流入する蒸気流を制御するように構成された第2弁118とを準備するステップと、第1弁116及び第2弁118に基準ストロークを提供するコマンド510を受信するステップと、操作パラメータ520を決定するステップであって、操作パラメータ520は、このコマンドに応じて基準ストロークを制限するステップとを含む。操作パラメータ520は、このコマンドとは無関係に、第1段112又は第2段114のうち少なくとも1つへの蒸気流を制御する。本発明の一実施例では、第1段112はHP段112を含み、第2段114はIP段114を含む。
【0009】
方法500は更に、コマンドと操作パラメータとの間の最小値を選択するステップ530を含む。この最小値は、第1弁116及び第2弁118の基準ストロークを決定する。ターボ機械102は、蒸気タービン102の形態であってもよい。
【0010】
操作パラメータは、圧力、温度、流量、又はこれらを組み合わせたもののうち少なくとも1つを含む、物理的要件に基づく。操作パラメータは、軸推力、ロータ応力、蒸気圧、又は物理的範囲のうち少なくとも1つを含む。
【0011】
操作パラメータの値は、第1段112又は第2段114のうち少なくとも1つへの蒸気流を個別に制限するように構成された、伝達関数アルゴリズムによって決定可能である。伝達関数アルゴリズムは、過渡条件、プラント状態、又は物理的要件のうち少なくとも1つに基づいて蒸気流を制限する。
【0012】
本発明の代替実施例において、発電所の操作柔軟性を向上させる方法500を提供する。方法500は、蒸気タービン102を備える発電所を準備するステップであって、蒸気タービン102は、HP段112及びHP段112の内部に部分的に設けられたロータ115を備え、ロータ115の周りの流路は蒸気をHP段112内で流体的に連通させるとともにロータ115を嵌合させるステップと、HP段112に流入する蒸気流を制御するように構成された第1弁116を準備するステップと、速度/負荷コマンド510を受信するステップであって、速度/負荷コマンドは第1弁116に基準ストロークを提供するステップと、操作パラメータ520を決定するステップであって、操作パラメータは、速度/負荷コマンドに応じて第1弁116のストロークを制限するように構成されているステップとを含む。操作パラメータは、速度/負荷コマンドとは無関係にHP段112への蒸気流を制御する。
【0013】
本発明の別の代替実施例において、発電所の操作柔軟性を向上させるシステム100を提供する。このシステムは、タービン102を備える発電所であって、蒸気タービン102はハウジング112、114及びこれらのハウジングの内部に部分的に設けられたロータ115を備え、ロータ115の周りの流路は蒸気をハウジング内で移動させるとともにロータ115を嵌合させる、発電所と、ハウジング112、114に流入する蒸気流を制御するように構成された第1弁116と、制御システム106とを備える。この制御システムは、速度/負荷コマンド510を受信するステップであって、速度/負荷コマンドは第1弁116に基準ストロークを提供するステップと、操作パラメータ520を決定するステップであって、操作パラメータは、速度/負荷コマンドに応じて第1弁116のストロークを制限するように構成されているステップと、を実行するように構成される。操作パラメータは、速度/負荷コマンドとは無関係に、第1弁116の基準ストロークを制御する。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施例が機能する発電所を示す概略図である。
【図2】蒸気タービンに流入する蒸気流の制御に使用する、従来のシステムを示す概略図である。
【図3】本発明の一実施例による、蒸気タービンに流入する蒸気流を制限するためのシステムを示す概略図である。
【図4】本発明の代替実施例による、蒸気タービンに流入する蒸気流を制限するための、別のシステムを示す概略図である。
【図5】本発明の別の代替実施例による、蒸気タービンに流入する蒸気流を制限する方法の例を示すフローチャートである。
【図6】本発明の一実施例による、蒸気タービンに流入する蒸気流を制限するための制御システムのブロック図である。
【発明を実施するための形態】
【0015】
本発明は、各段に流入する蒸気流を個別に制御する方法及びシステムを提供することによって、蒸気タービンの操作柔軟性を向上させる技術的効果を有する。この方法論の利点は、許容可能な限界内に軸推力負荷を維持すること、操作柔軟性を向上させること、拡大する動作範囲への動的なアプローチを提供することを含むが、これらに限定されない。
【0016】
下記の好適な実施形態の詳細な説明では、本発明の特定の実施形態を図示した添付図面を参照する。これとは異なる構成及び操作から成るその他の実施形態も、本発明の範囲から逸脱することはない。
【0017】
本明細書では、あくまでも読み手の便宜のために、或る特定の用語を用いることがあるが、このことが、本発明の範囲を限定するものとして捉えられるべきではない。例えば、「上」「下」「左」「右」「前」「後」「上端部」「底部」「水平」「垂直」「上流」「下流」「前方」「後方」等のような語は、図面上の構成を記述するにすぎない。更に、本発明の実施形態の要素は、あらゆる方向に配向可能なので、こうした用語は、別途明示しない限り、こうした変化を包含するものと理解されたい。
【0018】
本明細書では、詳細な実施例を開示する。しかし、本明細書に開示する構造的及び機能的な具体的詳細は、実施例を記述するための典型に過ぎない。但し、実施例を多数の改変形態で実施することもできるので、本明細書に記載の実施形態のみに実施例が限定されることはない、ということを理解されたい。
【0019】
このように、実施例には様々な修正及び改変形態が可能であり、それらの実施形態が、例示目的において図示され、本明細書の詳細に記述されている。ししかし、開示した特定の形態に実施例を限定する意図はなく、むしろ、実施例には、実施例の範囲に含まれる全ての修正、等価物、及び改変が含まれる。
【0020】
本明細書では、「第1」「第2」等の表現を用いて様々な要素を記述することがあるが、これらの要素がこうした表現によって限定されることはない。これらの表現は、或る要素を他の要素と区別するためだけに用いられる。例えば、実施例の範囲を逸脱することなく、「第1の要素」を「第2の要素」と表現することができ、同様に、「第2の要素」を「第1の要素」と表現することができる。本明細書で用いる「及び/又は」という表現は、関連して列挙する項目のいずれか、関連して列挙する項目のの全て、関連して列挙する項目のうち1つ以上を組み合わせたものを含む。
【0021】
本明細書で使用する用語は、特定の実施形態を記述するためのものにすぎず、実施例を限定する意図はない。本明細書で用いる単数形は、文脈上明記しない限り、同様に複数形も含むことを意図している。
【0022】
また、明らかなように、「有する」「備える」「含む」及び/又は「包含する」等の表現は、提示した特徴、整数、ステップ、操作、要素、及び/又は部品が存在することを明記するものであり、その他の特徴、整数、ステップ、操作、要素、部品、及び/又はこれらを組み合わせたものが存在すること、又はこれらを追加することを除外することはない。
【0023】
本発明は様々な蒸気タービンに適用可能である。本発明の一実施例は、単一の蒸気タービン又は複数の蒸気タービンのいずれにも適用可能である。
【0024】
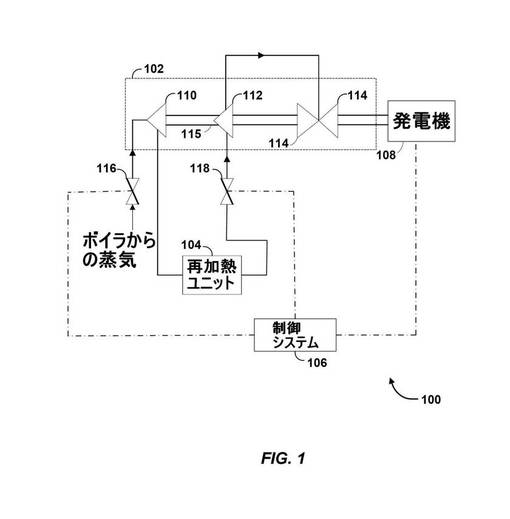
ここで図面を参照すると、それぞれの図面を通じて、様々な数字で類似の要素を表している。図1は、発電所100等の、ただしこれに限定されない、現場100に配備される蒸気タービン102を示す概略図である。図1は、蒸気タービン102、再加熱器ユニット104、制御システム106、及び発電機108を有する現場100を示す。
【0025】
図1に示すように、蒸気タービン102は、第1段110及び第2段112を含み得る。本発明の様々な実施例において、蒸気タービン102の第1段110及び第2段112は、高圧(HP)段110、中圧(IP)段112である。本発明の様々なその他の実施例において、HP段110をハウジング110と称し、IP段112を追加ハウジング112と称することがある。更に、蒸気タービン102は、第3段114も含み得る。本発明の一実施例において、第3段114は、低圧(LP)段114である。蒸気タービン102は更に、ロータ115を含み、ロータ115は、蒸気タービン102の第1、第2、及び第3段110、112、及び114の内部に設けられる。本発明の一実施例では、ロータ115の周りの流路が、HP段110とIP段112との間で蒸気を流体的に連通させている。
【0026】
図1に示すように、蒸気タービン102は、それぞれ第1段110及び第2段112に流入する蒸気流を制御するための第1弁116及び第2弁118を含み得る。本発明の様々な実施例において、第1弁116及び第2弁118は、それぞれHP段110及びIP段112に流入する蒸気流を制御するための制御弁116及びインターセプト弁118であってもよい。
【0027】
蒸気タービン102の稼働時、HP段110から抽出された蒸気を、再加熱器ユニット104に通し、IP段112に流入する前に蒸気の温度を上昇させることができる。続いて、図1に示すように、蒸気がインターセプト弁118を通り再加熱器ユニット104から抽出され、IP段112及びLP段114に流入する。その後、蒸気は、IP段112及びLP段114を出て、復水器(図示せず)に流入する。
【0028】
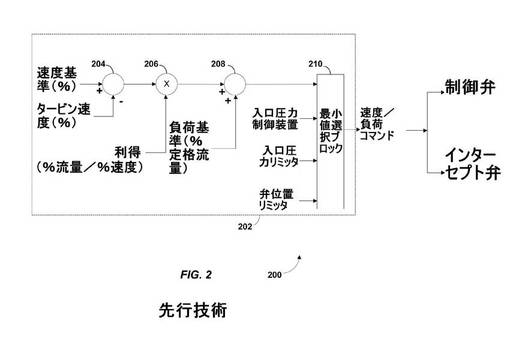
図2は、蒸気タービン102に流入する蒸気流を制御するための、従来のシステム200を示す概略図である。図2及び本明細書における、これに関連する考察は、周知の方法論を示す。図2に示すように、システム200は、速度/負荷管理装置202を含む。速度/負荷管理装置202は、HP段110及びIP段112を通る蒸気流を制御する速度/負荷コマンドを生成する。
【0029】
図2に示すように、比較器ブロック204は、蒸気タービン102の実際の速度を蒸気タービン102の基準速度と比較した後に、エラー信号を生成する。乗算器ブロック206はその後、比較器ブロック204の出力を受信する。ここのとき、エラー信号が再び乗算され、エラー調整信号が生成される。エラー調整信号は、エラー信号と蒸気タービン102の現在の負荷との関係を確立するのに役立つ。次に、サミングジャンクション208が、乗算器ブロック206の出力、及びタービン負荷基準を受信する。サミングジャンクション208はその後、フロー基準信号を生成する。その後、最小値選択ブロック210は、サミングジャンクション208の出力を受信する。最小値選択ブロック210へのその他の入力は、入口圧力制御装置、入口圧力リミッタ、弁位置リミッタ等の、ただしこれらに限定されない、その他の機能を含み得る。最小値選択ブロック210は、入力信号を比較及び選択した後、入力信号の最も制限の厳しい値を出力する。この出力は、速度/負荷コマンドと考えられる。
【0030】
図2に示すように、速度/負荷コマンドは、制御弁116及びインターセプト弁118をストロークするための基準コマンドを生成する。続いて、システム200は、制御弁116及びインターセプト弁118に基準ストロークを付与する。この周知の方法論では、通常、ほぼ等しい蒸気流がHP段110及びIP段112を通る。この周知の方法論はまた、結果的に蒸気タービン102の操作柔軟性を減少させる可能性がある。
【0031】
図3から6は、本発明の実施例による、蒸気タービン102に流入する蒸気流を個別に制御するためのシステム及び方法を示す概略図である。上述のように、平衡流量は、各段110、112に同量の蒸気流を供給しようとする方法論及び/又は制御原理と考えられる。本発明の実施例は、不平衡流量方式及び/又は制御原理を包含する。このとき、各段110、112に流入する蒸気流を意図的に不平衡状態にすることで、蒸気タービンの動作をその真の限界まで制御することにより、タービン102の操作柔軟性を向上させることができる。このことは、リアルタイムで各段110、112に流入する蒸気流を個別に制御することによって実現可能である。本発明の実施例では、各段110、112に個別のフローリミッタ等を設けてもよい。これらのフローリミッタは、各段110、112に流入する蒸気流を実質的に制御するそれぞれの弁(CV、IV)に対して個別に作用する。
【0032】
本発明の実施例を、周知の方法論及び制御原理の一部に組み込むことができる。このことによって、蒸気タービンの各段110、112の間の蒸気流量を制限作用によって意図的に不平衡状態としながら、速度/負荷制御スキーム(等)の機能を維持できる。
【0033】
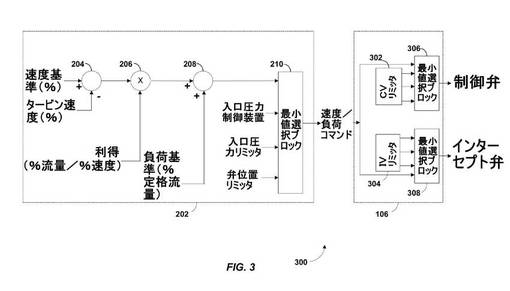
図3は、本発明の一実施例による、蒸気タービンに流入する蒸気流を制限するためのシステム300を示す概略図である。図1にも示されている制御システム106は、速度/負荷管理装置202によって生成された速度/負荷コマンドを受信する。別の実施例では、速度/負荷コマンドを受信しない制御システム106が設けられる。
【0034】
制御システム106を、第1弁116及び第2弁118を制御するように構成できる。本発明の一実施例において、制御システム106は、第1弁116及び第2弁118の速度/負荷コマンド及び基準ストロークを決定する。制御システム106を、第1段110に関わる操作パラメータと、第2段112に関わる操作パラメータを決定するようにも構成できる。操作パラメータは、軸推力、ロータ応力、蒸気圧等を含み得るが、これらに限定されない。本発明の一実施例において、操作パラメータは、少なくとも部分的に、1つ以上の物理的要件に基づく。物理的要件は、圧力、温度、流量、又はこれらを組み合わせたものを含み得るが、これらに限定されない。
【0035】
各操作パラメータを決定した後、制御システム106は、少なくとも部分的には操作パラメータに基づいて、第1弁116及び第2弁118の基準ストロークを個別に制限する。これらの操作により、速度/負荷コマンドとは無関係に、HP段110及びIP段112に流入する蒸気流を個別に制御できる。
【0036】
図3に示すように、制御システム106の一実施例は、決定された操作パラメータに基づいて、それぞれの段110、112への蒸気流を制限するように機能する、フローリミッタ302及び304を含む。フローリミッタ302は、HP段110の蒸気流を制限する制御弁フローリミッタ(以下、「CVフローリミッタ302」と称される)であってもよい。フローリミッタ304は、IP段112の蒸気流を制限するインターセプト弁フローリミッタ(以下、「IVフローリミッタ304」と称される)であってもよい。
【0037】
本発明の一実施例において、制御システム106は更に、速度/負荷コマンドとフローリミッタ302及び304の出力との間の最小値を選択する、最小値選択ブロック306及び308を含む。その後、制御システム106は、最小選択値に基づいて、制御弁116及びインターセプト弁118の基準ストロークを決定する。本発明の一実施例において、最小値選択ブロック306は、速度/負荷コマンドとCVフローリミッタ302の出力との間の最小値を選択する。ここで、制御システム106は、この最小値を利用して、制御弁116の基準ストロークを決定する。同様に、最小値選択ブロック308は、速度/負荷コマンドとIVフローリミッタ304の出力との間の最小値を選択する。そして、制御システム106は、この最小値を利用して、インターセプト弁118の基準ストロークを決定する。
【0038】
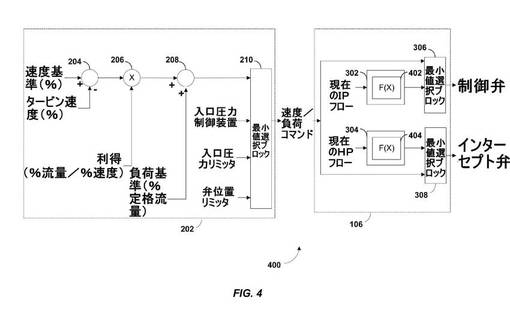
図4は、本発明の代替実施例による、蒸気タービン102に流入する蒸気流を制限するための別のシステムを示す概略図である。図4に示すように、制御システム106は、上述のように、速度/負荷管理装置202によって生成された速度/負荷コマンドを受信する。そして、制御システム106は、伝達関数アルゴリズムを使用する、リミッタモジュール402及び404を含む。リミッタモジュール402は、HP段110の蒸気流を制御するためのフローリミッタ302の要素であってもよく、リミッタモジュール404は、IP段112の蒸気流を制御するためのフローリミッタ304内に設けられてもよい。
【0039】
本発明の一実施例において、伝達関数アルゴリズムは、操作パラメータの値を決定する。伝達関数アルゴリズムは、蒸気タービン102の第1段110及び/又は第2段112への蒸気流を個別に制御するように構成される。本発明の一実施例において、伝達関数アルゴリズムは、過渡条件、発電所の状態、又は物理的条件のうち少なくとも1つに基づいて、蒸気流を制限する。物理的要件は、圧力、温度、流量、又はこれらを組み合わせたものを含み得るが、これらに限定されない。
【0040】
本発明の一実施例において、伝達関数アルゴリズムは、現在の動作条件に対応する、HP段110の最大許容可能蒸気流量及びIP段112の最大許容可能蒸気流量の値を決定するように構成される。ここで、CVフローリミッタ302は、HP段110の蒸気流を連続的に監視する。CVフローリミッタ302は、蒸気タービン102が動的動作範囲内で動作しているか否かも追跡できる。具体的には、CVフローリミッタ302は、HP段110の実際の蒸気流量を、HP段110の許容可能な蒸気流量と比較する。ここで、HP段110の現在の蒸気流量がHP段110の許容可能な蒸気流量を下回る場合、制御システム106はCVフローリミッタ302の出力を増加させる。
【0041】
使用時には、初期始動中に、CVフローリミッタ302の出力が先ず、最小値選択ブロック210によって生成された速度/負荷コマンドよりも大きい値に設定される。その後、最小値選択ブロック306は、速度/負荷コマンドとCVフローリミッタ302の出力との最小値を選択する。そのため、制御弁116は、最小値選択ブロック210からの速度/負荷コマンドに基づいて調整される。しかし、HP段110の現在の蒸気流量がHP段110の許容可能な蒸気流量を上回る場合、CVフローリミッタ302の出力は、初期設定値から変化する。HP段110の現在の蒸気流量がHP段110の許容可能な蒸気流量を下回る場合、制限動作は不要である。本発明の一実施例において、IVフローリミッタ304もまた、類似の制限動作を実行可能である。
【0042】
本発明の一実施例において、CVフローリミッタ302によって実行される制限動作は、制御弁116を通る蒸気流を制限することによってカスケードバイパス始動時又は類似の動作時に発生するロータ応力を減少させる。そのため、蒸気流量は不平衡状態となり、各段110、112がその動作範囲内で動作する。このような意図的な不平衡アプローチは、蒸気タービン102の操作柔軟性を向上させることがある。
【0043】
明らかなように、本発明は、方法、システム、又はコンピュータプログラム製品として実施可能である。したがって、本発明は、完全なハードウェアでの実施例、完全なソフトウェアでの実施例(ファームウェア、常駐ソフトウェア、マイクロコード等を含む)、又はソフトウェア及びハードウェアの態様を組み合わせた実施例の形態であってもよく、その全てが本明細書では、概して「回路」、「モジュール」、又は「システム」と称される。更に、本発明は、媒体に実装されたコンピュータ利用可能プログラムコードを有する、コンピュータ利用可能記憶媒体上のコンピュータプログラム製品の形態であってもよい。
【0044】
いずれの適当なコンピュータ読み取り可能媒体も、利用可能である。コンピュータ利用可能又はコンピュータ読み取り可能媒体は、例えば、電子、磁気、光学、電磁、赤外線、又は半導体システム、機器、装置、又は伝播媒体であってもよいが、これらに限定されない。コンピュータ読み取り可能媒体の具体例(網羅的ではないリスト)としては、1つ以上の配線を含む電気的接続、ポータブルコンピュータディスケット、ハードディスク、ランダムアクセスメモリ(RAM)、読み取り専用メモリ(ROM)、消去及びプログラム可能読み取り専用メモリ(EPROM又はフラッシュメモリ)、光ファイバ、ポータブルコンパクトディスク読み取り専用メモリ(CD−ROM)、光学記憶装置、インターネット又はイントラネットを支援する物等の電送媒体、又は磁気記憶装置が含まれる。なお、プログラムは、例えば紙又はその他の媒体を光学走査し、必要であればその後コンパイル、翻訳、又はその他適当な方法で処理し、その後コンピュータメモリに格納することによって、電子的に捕捉可能なので、コンピュータ利用可能又はコンピュータ読み取り可能媒体は、プログラムがプリントされた紙又はその他の適当な媒体であってもよい。本文献の文脈上、コンピュータ利用可能又はコンピュータ読み取り可能媒体は、命令実行システム、機器、又は装置による使用の目的の又はこれらに関連付けられたプログラムを収容、格納、通信、伝播、又は伝送可能な、いずれの媒体であってもよい。
【0045】
本発明の動作を実行するためのコンピュータプログラムコードは、Java(商標)7、Smalltalk、又はC++等のオブジェクト指向プログラミング言語で記述可能である。しかし、本発明の動作を実行するためのコンピュータプログラムコードは、「C」プログラミング言語、又は類似の言語等の、従来の手続き型プログラミング言語でも記述可能である。プログラムコードは、完全又は部分的にユーザのコンピュータ上で、スタンドアローン型ソフトウェアパッケージとして、部分的にユーザのコンピュータ上及び部分的に遠隔コンピュータ上又は完全に遠隔コンピュータ上で実行可能である。後者の場合、遠隔コンピュータは、ローカルエリアネットワーク(LAN)又は広域ネットワーク(WAN)を通じてユーザのコンピュータに接続されてもよいが、外部コンピュータに接続されてもよい(例えば、インターネットサービスプロバイダを使用してインターネット経由で接続されてもよい)。
【0046】
本発明は、本発明の実施例による方法、機器(システム)、及びコンピュータプログラム製品のフローチャート解説及び/又はブロック図を参照して、以下に記載される。フローチャート解説及び/又はブロック図の各ブロック、並びにフローチャート解説及び/又はブロック図の組み合わせは、コンピュータプログラム命令によって実行可能であることは、理解されよう。これらのコンピュータプログラム命令を、汎用コンピュータ、専用コンピュータ、又はその他のプログラム可能なデータ処理装置に提供し、マシンを作製することで、コンピュータ又はその他のプログラム可能なデータ処理装置を用いて実行される命令により、フローチャート及び/又はブロック図又はブロックに明記される機能/作用を実行する手段を形成できる。
【0047】
これらのコンピュータプログラム命令はまた、コンピュータ又はその他のプログラム可能なデータ処理装置を特定の態様で機能させる、コンピュータ読み取り可能メモリに格納されていてもよく、これによって、コンピュータ読み取り可能メモリに格納された命令で、フローチャート及び/又はブロック図又はブロックに明記された機能/作用を実行する命令手段を含む製品を構成できる。コンピュータプログラム命令が、コンピュータ又はその他のプログラム可能なデータ処理装置上にもロードされると、コンピュータ又はその他のプログラム可能な装置上で実行されるべき一連の動作ステップによってコンピュータ実行プロセスが生成され、コンピュータ又はその他のプログラム可能な装置上で実行される命令により、フローチャート及び/又はブロック図のブロックに明記する機能/作用を実行するステップが提供される。
【0048】
本発明は、蒸気タービン102に流入する蒸気流を制限する技術的効果を有する、制御システム106を含み得る。本発明は、制御弁116及びインターセプト弁118の基準ストロークを自動的に決定するように構成可能である。或いは、制御システム106は、開始動作にユーザの操作を必要とするように構成可能である。本発明の制御システム106の一実施例は、スタンドアローン型制御システムとして機能する。或いは、制御システム106は、ターボ機械制御又は蒸気発電所制御システム等の、ただしこれらに限定されない、より幅広いシステム内に、モジュール等として統合されてもよい。
【0049】
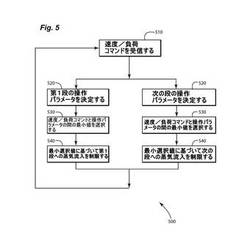
ここで図5を参照する。図5は、本発明の別の代替実施例による、蒸気タービンに流入する蒸気流を制限する方法500の一例を示すフローチャートである。方法500には、蒸気タービン等の、ただしこれに限定されない、蒸気タービン102が設けられる。本発明の一実施例において、蒸気タービン102は、発電所等の現場100に配備される蒸気タービン102を含む。蒸気タービン102は、第1段110を含む。本発明の一実施例において、蒸気タービンは、第2段112も含む。更に、ロータ115は、部分的に第1段112の内部に設けられてもよい。ロータ115の周りの流路は、第1段110内で蒸気を流体的に連通させ、ロータ115を嵌合させる。本発明の一実施例において、ロータ115は、上述のように、部分的に第1段110と第2段112との間に設けられる。本発明の一実施例において、蒸気タービン102は、第3段114も含む。第3段114は、図1に示すように、LP段114とみなされてよい。
【0050】
方法500では、第1段110を通る蒸気流を制御するために、第1弁116を操作する。方法500では、第2段112を通る蒸気流を制御するために、第2弁118を操作することもできる。ここで、第1弁116及び第2弁118は、それぞれHP段110及びIP段112に流入する蒸気流を制御する、制御弁116及びインターセプト弁118の形態であってもよい。
【0051】
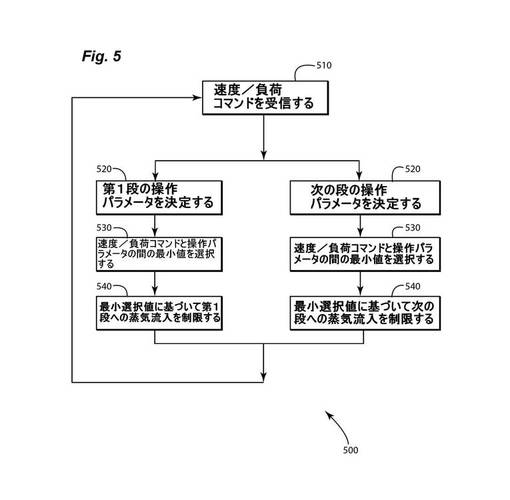
ステップ510において、方法500は、速度/負荷コマンドを受信する。速度/負荷コマンドは、第1弁116の基準ストロークを提供する。本発明の一実施例において、速度/負荷コマンドは、第2弁118の基準ストロークも提供する。速度/負荷コマンドは、速度/負荷管理装置202を使用して生成される。本発明の一実施例において、方法500により、制御システム106で速度/負荷管理装置202から速度/負荷コマンドを受信できる。
【0052】
ステップ520において、方法500は、各段110、112の個別の操作パラメータを決定する。上述のように、操作パラメータは、軸推力、ロータ応力、蒸気圧等を含み得るが、これらに限定されない。これに加えて、操作パラメータは、少なくとも部分的に、圧力、温度、流量、又はこれらを組み合わせたもの等の、ただしこれらに限定されない、物理的要件に基づいてもよい。本発明の一実施例において、この方法により、制御システム106で操作パラメータを決定できる。操作パラメータは、速度/負荷コマンドに応じて第1弁116の基準ストロークを制限するように構成される。本発明の一実施例において、操作パラメータは、速度/負荷コマンドに応じて第1弁116及び第2弁118の基準ストロークを制限するように構成される。
【0053】
ステップ530において、方法500は、速度/負荷コマンドと操作パラメータとの間の最小値を選択する。
【0054】
ステップ540において、方法500は、最小選択値に基づいて、各段110、112への蒸気流入を制限する。ここで、制御システム106は、速度/負荷コマンドとは無関係に、最小値に基づいて第1弁116及び第2弁118の基準ストロークを選択する。
【0055】
方法500の一実施例には、操作パラメータの値、又は値の範囲を決定するための伝達関数アルゴリズムが含まれる。伝達関数アルゴリズムは、蒸気タービン102の第1段110及び第2段112のうち少なくとも1つへの蒸気流を個別に制限するように構成される。本発明の一実施例において、伝達関数アルゴリズムは、HP段110及び/又はIP段112への蒸気流を個別に制限するように構成される。
【0056】
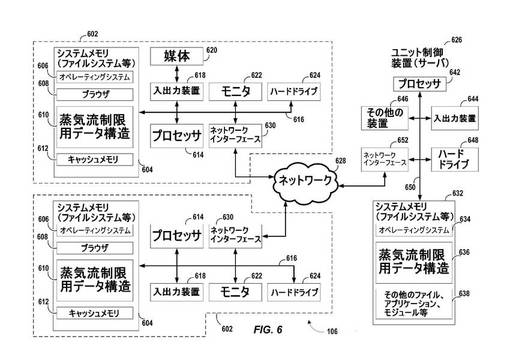
図6は、本発明の一実施例による、蒸気タービン102に流入する蒸気流を制限するための制御システム106の非限定例のブロック図である。本発明の一実施例は、図6には示していない制御手段等によって実行可能である。この制御手段には、機械システム、空気圧システム、アナログシステム、電気機械システム、電気システム、電子システム、デジタルシステム、又はこれらを組み合わせたもの等が含まれるが、これらに限定されない。
【0057】
図6を参照すると、方法500の各要素は、制御システム106内に実装されるか、又は制御システム106によって実行される。制御システム106は、1つ以上のユーザ又はクライアント通信装置602、又は類似のシステム又は装置を含む(図6には2つ示す)。各通信装置602は、例えばコンピュータシステム、携帯端末、携帯電話、又は電子メッセージを送受信可能な類似の装置であってもよいが、これらに限定されない。
【0058】
通信装置602は、システムメモリ604又はローカルファイルシステムを含む。システムメモリ604は、例えば読み取り専用メモリ(ROM)及びランダムアクセスメモリ(RAM)を含むが、これらに限定されない。ROMは、基本入出力システム(BIOS)を含む。BIOSは、通信装置602の要素又は部品間での情報伝達に役立つ、基本ルーチンを収容する。システムメモリ604は、通信装置602の全体的な動作を制御するためのオペレーティングシステム606を収容する。システムメモリ604は更に、ブラウザ608又はウェブブラウザも含み得る。システムメモリ604は更に、図5の方法500と類似の、又は図5の方法500の要素を含む、蒸気タービン102に流入する蒸気流を制限するためのデータ構造610又はコンピュータ実行可能コードも含み得る。
【0059】
システムメモリ604は更に、蒸気タービン102に流入する蒸気流を制限するための、及び蒸気タービン102の操作柔軟性を向上させるための、図5の方法500と併用されるテンプレートキャッシュメモリ612を含み得る。
【0060】
通信装置602は更に、通信装置602の別の部品の動作を制御するプロセッサ又は処理ユニット614も含み得る。オペレーティングシステム606、ブラウザ608、及びデータ構造610は、処理ユニット614上で動作可能である。処理ユニット614は、システムバス616によって、メモリシステム604及び通信装置602のその他の構成要素に結合される。
【0061】
通信装置602は更に、複数の入力装置(I/O)、出力装置、又は複合入出力装置618も含み得る。各入出力装置618は、入出力インターフェース(図示せず)によって、システムバス616に結合される。入力装置及び出力装置、又は複合入出力装置618は、蒸気タービン102に流入する蒸気流を制限するために、ユーザが通信装置602を操作してこれとインターフェース接続を行うことと、ソフトウェアにアクセスするための並びにソフトウェアを操作及び制御するためのブラウザ608及びデータ構造610を制御することを許可する。入出力装置618は、本明細書で論じた動作を実行する、キーボード、コンピュータポインティングデバイス等を含む。
【0062】
入出力装置618は、例えばディスクドライブ、光学、機械、磁気、又は赤外線入出力装置、モデム等も含むが、これらに限定されない。入出力装置618を使用して、記憶媒体620にアクセスできる。媒体620は、通信装置602等のシステムにより使用するための、或いは、通信装置602等のシステムと組み合わせて使用するための、コンピュータ読み取り可能又はコンピュータ実行可能命令又はその他の情報を、収容、格納、通信、又は伝送可能である。
【0063】
通信装置602はまた、ディスプレイ又はモニタ622等のその他の装置を含むか又はこれに接続されてもよい。モニタ622により、ユーザは通信装置602と通信できる。
【0064】
通信装置602は更に、ハードドライブ624も含み得る。ハードドライブ624は、ハードドライブインターフェース(図示せず)によってシステムバス616に結合されてもよい。ハードドライブインターフェース624はまた、ローカルファイルシステム又はシステムメモリ604の一部を形成してもよい。通信装置602を動作させるにあたり、プログラム、ソフトウェア、及びデータを、システムメモリ604とハードドライブ624との間で伝送及び交換してもよい。
【0065】
通信装置602は、ユニット制御装置626と通信可能であり、ネットワーク628を介して通信装置602と類似のその他のサーバ又はその他の通信装置にアクセスできる。システムバス616は、ネットワークインターフェース630によってネットワーク628に結合されてもよい。ネットワークインターフェース630は、ネットワーク628に結合するための、モデム、イーサネット(商標)カード、ルータ、ゲートウェイ等であってもよい。結合は、有線又は無線接続であってもよい。ネットワーク628は、インターネット、プライベートネットワーク、イントラネット等であってもよい。
【0066】
ユニット制御装置626は、ファイルシステム、ROM、RAM等を含み得るシステムメモリ632も含み得る。システムメモリ632は、通信装置602のオペレーティングシステム606と類似のオペレーティングシステム634を含み得る。システムメモリ632は更に、蒸気タービン102に流入する蒸気流を制限するためのデータ構造636も含み得る。データ構造636は、蒸気タービン102に流入する蒸気流を制限するための、及び発電所の操作柔軟性を向上させるための、方法500に関連して記載されたものと類似の動作を含み得る。サーバシステムメモリ632は、その他のファイル638、アプリケーション、モジュール等も含み得る。
【0067】
ユニット制御装置626は、ユニット制御装置626のその他の装置の動作を制御するための、プロセッサ又は処理ユニット642も含み得る。ユニット制御装置626は、入出力装置644も含み得る。入出力装置644は、通信装置602の入出力装置618と類似であってよい。ユニット制御装置626は、入出力装置644とともにユニット制御装置626にインターフェースを提供するための、モニタ等のその他の装置646も含み得る。ユニット制御装置626は、ハードディスクドライブ648も含み得る。システムバス650で、ユニット制御装置626の別々の部品を接続できる。ネットワークインターフェース652は、システムバス650を介して、ユニット制御装置626をネットワーク628に結合できる。
【0068】
図中のフローチャート及びステップ図は、本発明の様々な実施例によるシステム、方法、及びコンピュータプログラム製品に可能な実装のアーキテクチャ、機能性、及び動作を示す。この点に関して、フローチャート又はステップ図の各ステップは、明記した論理機能を実行するための1つ以上の実行可能な命令を含む、モジュール、セグメント、又はコードの一部を表し得る。なお、幾つかの代替的実装において、ステップに記載されている機能を、図示のものとは異なる順序で行ってもよい。例えば、連続して図示した2つのステップを、実際には、ほぼ同時に実行してもよく、或いは場合によっては、付随する機能性に応じて、ステップを逆の順序で実行してもよい。ブロック図及び/又はフローチャート解説の各ステップ、並びにブロック図及び/又はフローチャート解説のステップの組み合わせは、明記した機能又は作用を実行する専用のハードウェアベースシステム、又は専用のハードウェア及びコンピュータ命令の組み合わせによって実現可能である。
【0069】
本明細書では、特定の実施形態を図示及び記述したが、当業者には明らかなように、同一の目的を達成すると予測されるあらゆる配置で、提示した特定の実施形態を置換することができ、本発明は、その他の環境におけるその他の用途も有する。本願は、本発明のいかなる改変又は変形も包含することを意図している。添付の特許請求の範囲は、本発明の範囲を、本明細書に開示した特定の実施形態に限定することを決して意図していない。
【0070】
当業者には明らかなように、幾つかの実施形態に関連して上述した多数の様々な特徴及び構成を更に、本発明に可能なその他の実施形態を形成するべく選択的に適用することができる。また、下記の幾つかの請求項その他が包含するあらゆる組み合わせ及び可能性のある実施形態は、本願の一部分であることを意図しているとしても、本発明の、繰り返しとなり得るものは全て、詳細に提示又は論述されていないことは、当業者に理解できよう。また、本発明の幾つかの実施形態についての以上の記述から、当業者は改良、変更、及び修正を想到可能であろう。当業者に想到可能な、こうした改良、変更、及び修正も、添付の特許請求の範囲に含まれることを意図している。更に、明らかなように、上述の内容は、記述した本願の実施形態のみに関するもので、本明細書では、添付の特許請求の範囲に定義した本願の概念及び範囲、並びにその等価物の概念及び範囲から逸脱することなく、多数の変更及び修正が可能である。
【技術分野】
【0001】
本発明は、主にターボ機械に関し、特に、蒸気タービンの段に流入する蒸気流を個別に制限するための方法及びシステムに関する。
【背景技術】
【0002】
蒸気タービンは、発電所、発熱システム、海洋推進システム、及びその他の熱的及び電力的な用途に、一般的に使用されている。蒸気タービンは通常、所定の圧力範囲内で動作する、少なくとも1つの段を含む。これには、高圧(HP)段と、再加熱段又は中圧(IP)段が含まれる。これらの段に収容された回転要素は通例、軸シャフトに取り付けられる。一般的に、制御弁及びインターセプト弁が、HP段及びIP段を通る蒸気流をそれぞれ制御する。
【0003】
蒸気タービンの通常運転には、3つの異なる段階(始動、負荷、停止)がある。始動段階は、全ての段に蒸気が行き渡る迄の、回転要素が揺動し始める運転段階の初期と考えられる。一般的に、始動段階は、特定の負荷において終了するものではない。負荷段階は、蒸気タービンの出力がほぼ所望の負荷(定格負荷等)になる迄、段に流入する蒸気の量が増加する運転段階と考えられる。停止段階は、蒸気タービン負荷が減少し、各段への蒸気流が徐々になくなり、回転要素が取り付けられたロータが減速して回転ギヤ速度になる運転段階と考えられる。
【0004】
蒸気タービンのオペレータは、負荷段階の大部分において流量平衡ストラテジーを使用することがある。このストラテジーでは、各段に等量の蒸気流を供給しようとする。ここで、制御システムは、関連する弁を位置決めするコマンドを用いて蒸気流を制御する。その他の制御スキームは、始動と停止の運転段階で共通して使用される。
【0005】
カスケードバイパスシステムと一体化された蒸気タービンの始動時は、制御弁が実質的に閉鎖され、蒸気がバイパス弁を介してインターセプト弁に迂回する。インターセプト弁では、蒸気タービンの初期速度/負荷の制御を行える。次に、所定の負荷範囲において、インターセプト弁が付勢されて開いた状態で、制御弁により主に速度/負荷の制御が行われる。その他の操作の結果、HP段への蒸気流量が著しく減少する一方で、IP段に大きな負荷がかかる。結果的に、流量を不平衡にすることで、ロータへの正味推力を増大させることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第5361585号明細書
【発明の概要】
【0007】
始動、負荷、及び停止の運転段階の間の蒸気タービンを制御する周知の方法には、幾つか問題がある。現時点で周知の方法は、不都合に古典的かもしれない。これらの方法では、操作柔軟性が低下し、大型の機械部品を要することがあるため、蒸気タービンが供給する正味出力が減少する可能性がある。したがって、蒸気タービンの操作柔軟性を向上させる方法及びシステムが望ましい。
【0008】
本発明の一実施例により、ターボ機械に流入する蒸気流を制限する方法500を提供する。方法500は、第1段112及び第2段114の内部に設けられたロータ115を備えるターボ機械102を準備するステップであって、ロータ115の周りの流路は、蒸気を第1段112及び第2段114の間で流体的に連通させるステップと、第1段112に流入する蒸気流を制御するように構成された第1弁116と第2段114に流入する蒸気流を制御するように構成された第2弁118とを準備するステップと、第1弁116及び第2弁118に基準ストロークを提供するコマンド510を受信するステップと、操作パラメータ520を決定するステップであって、操作パラメータ520は、このコマンドに応じて基準ストロークを制限するステップとを含む。操作パラメータ520は、このコマンドとは無関係に、第1段112又は第2段114のうち少なくとも1つへの蒸気流を制御する。本発明の一実施例では、第1段112はHP段112を含み、第2段114はIP段114を含む。
【0009】
方法500は更に、コマンドと操作パラメータとの間の最小値を選択するステップ530を含む。この最小値は、第1弁116及び第2弁118の基準ストロークを決定する。ターボ機械102は、蒸気タービン102の形態であってもよい。
【0010】
操作パラメータは、圧力、温度、流量、又はこれらを組み合わせたもののうち少なくとも1つを含む、物理的要件に基づく。操作パラメータは、軸推力、ロータ応力、蒸気圧、又は物理的範囲のうち少なくとも1つを含む。
【0011】
操作パラメータの値は、第1段112又は第2段114のうち少なくとも1つへの蒸気流を個別に制限するように構成された、伝達関数アルゴリズムによって決定可能である。伝達関数アルゴリズムは、過渡条件、プラント状態、又は物理的要件のうち少なくとも1つに基づいて蒸気流を制限する。
【0012】
本発明の代替実施例において、発電所の操作柔軟性を向上させる方法500を提供する。方法500は、蒸気タービン102を備える発電所を準備するステップであって、蒸気タービン102は、HP段112及びHP段112の内部に部分的に設けられたロータ115を備え、ロータ115の周りの流路は蒸気をHP段112内で流体的に連通させるとともにロータ115を嵌合させるステップと、HP段112に流入する蒸気流を制御するように構成された第1弁116を準備するステップと、速度/負荷コマンド510を受信するステップであって、速度/負荷コマンドは第1弁116に基準ストロークを提供するステップと、操作パラメータ520を決定するステップであって、操作パラメータは、速度/負荷コマンドに応じて第1弁116のストロークを制限するように構成されているステップとを含む。操作パラメータは、速度/負荷コマンドとは無関係にHP段112への蒸気流を制御する。
【0013】
本発明の別の代替実施例において、発電所の操作柔軟性を向上させるシステム100を提供する。このシステムは、タービン102を備える発電所であって、蒸気タービン102はハウジング112、114及びこれらのハウジングの内部に部分的に設けられたロータ115を備え、ロータ115の周りの流路は蒸気をハウジング内で移動させるとともにロータ115を嵌合させる、発電所と、ハウジング112、114に流入する蒸気流を制御するように構成された第1弁116と、制御システム106とを備える。この制御システムは、速度/負荷コマンド510を受信するステップであって、速度/負荷コマンドは第1弁116に基準ストロークを提供するステップと、操作パラメータ520を決定するステップであって、操作パラメータは、速度/負荷コマンドに応じて第1弁116のストロークを制限するように構成されているステップと、を実行するように構成される。操作パラメータは、速度/負荷コマンドとは無関係に、第1弁116の基準ストロークを制御する。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施例が機能する発電所を示す概略図である。
【図2】蒸気タービンに流入する蒸気流の制御に使用する、従来のシステムを示す概略図である。
【図3】本発明の一実施例による、蒸気タービンに流入する蒸気流を制限するためのシステムを示す概略図である。
【図4】本発明の代替実施例による、蒸気タービンに流入する蒸気流を制限するための、別のシステムを示す概略図である。
【図5】本発明の別の代替実施例による、蒸気タービンに流入する蒸気流を制限する方法の例を示すフローチャートである。
【図6】本発明の一実施例による、蒸気タービンに流入する蒸気流を制限するための制御システムのブロック図である。
【発明を実施するための形態】
【0015】
本発明は、各段に流入する蒸気流を個別に制御する方法及びシステムを提供することによって、蒸気タービンの操作柔軟性を向上させる技術的効果を有する。この方法論の利点は、許容可能な限界内に軸推力負荷を維持すること、操作柔軟性を向上させること、拡大する動作範囲への動的なアプローチを提供することを含むが、これらに限定されない。
【0016】
下記の好適な実施形態の詳細な説明では、本発明の特定の実施形態を図示した添付図面を参照する。これとは異なる構成及び操作から成るその他の実施形態も、本発明の範囲から逸脱することはない。
【0017】
本明細書では、あくまでも読み手の便宜のために、或る特定の用語を用いることがあるが、このことが、本発明の範囲を限定するものとして捉えられるべきではない。例えば、「上」「下」「左」「右」「前」「後」「上端部」「底部」「水平」「垂直」「上流」「下流」「前方」「後方」等のような語は、図面上の構成を記述するにすぎない。更に、本発明の実施形態の要素は、あらゆる方向に配向可能なので、こうした用語は、別途明示しない限り、こうした変化を包含するものと理解されたい。
【0018】
本明細書では、詳細な実施例を開示する。しかし、本明細書に開示する構造的及び機能的な具体的詳細は、実施例を記述するための典型に過ぎない。但し、実施例を多数の改変形態で実施することもできるので、本明細書に記載の実施形態のみに実施例が限定されることはない、ということを理解されたい。
【0019】
このように、実施例には様々な修正及び改変形態が可能であり、それらの実施形態が、例示目的において図示され、本明細書の詳細に記述されている。ししかし、開示した特定の形態に実施例を限定する意図はなく、むしろ、実施例には、実施例の範囲に含まれる全ての修正、等価物、及び改変が含まれる。
【0020】
本明細書では、「第1」「第2」等の表現を用いて様々な要素を記述することがあるが、これらの要素がこうした表現によって限定されることはない。これらの表現は、或る要素を他の要素と区別するためだけに用いられる。例えば、実施例の範囲を逸脱することなく、「第1の要素」を「第2の要素」と表現することができ、同様に、「第2の要素」を「第1の要素」と表現することができる。本明細書で用いる「及び/又は」という表現は、関連して列挙する項目のいずれか、関連して列挙する項目のの全て、関連して列挙する項目のうち1つ以上を組み合わせたものを含む。
【0021】
本明細書で使用する用語は、特定の実施形態を記述するためのものにすぎず、実施例を限定する意図はない。本明細書で用いる単数形は、文脈上明記しない限り、同様に複数形も含むことを意図している。
【0022】
また、明らかなように、「有する」「備える」「含む」及び/又は「包含する」等の表現は、提示した特徴、整数、ステップ、操作、要素、及び/又は部品が存在することを明記するものであり、その他の特徴、整数、ステップ、操作、要素、部品、及び/又はこれらを組み合わせたものが存在すること、又はこれらを追加することを除外することはない。
【0023】
本発明は様々な蒸気タービンに適用可能である。本発明の一実施例は、単一の蒸気タービン又は複数の蒸気タービンのいずれにも適用可能である。
【0024】
ここで図面を参照すると、それぞれの図面を通じて、様々な数字で類似の要素を表している。図1は、発電所100等の、ただしこれに限定されない、現場100に配備される蒸気タービン102を示す概略図である。図1は、蒸気タービン102、再加熱器ユニット104、制御システム106、及び発電機108を有する現場100を示す。
【0025】
図1に示すように、蒸気タービン102は、第1段110及び第2段112を含み得る。本発明の様々な実施例において、蒸気タービン102の第1段110及び第2段112は、高圧(HP)段110、中圧(IP)段112である。本発明の様々なその他の実施例において、HP段110をハウジング110と称し、IP段112を追加ハウジング112と称することがある。更に、蒸気タービン102は、第3段114も含み得る。本発明の一実施例において、第3段114は、低圧(LP)段114である。蒸気タービン102は更に、ロータ115を含み、ロータ115は、蒸気タービン102の第1、第2、及び第3段110、112、及び114の内部に設けられる。本発明の一実施例では、ロータ115の周りの流路が、HP段110とIP段112との間で蒸気を流体的に連通させている。
【0026】
図1に示すように、蒸気タービン102は、それぞれ第1段110及び第2段112に流入する蒸気流を制御するための第1弁116及び第2弁118を含み得る。本発明の様々な実施例において、第1弁116及び第2弁118は、それぞれHP段110及びIP段112に流入する蒸気流を制御するための制御弁116及びインターセプト弁118であってもよい。
【0027】
蒸気タービン102の稼働時、HP段110から抽出された蒸気を、再加熱器ユニット104に通し、IP段112に流入する前に蒸気の温度を上昇させることができる。続いて、図1に示すように、蒸気がインターセプト弁118を通り再加熱器ユニット104から抽出され、IP段112及びLP段114に流入する。その後、蒸気は、IP段112及びLP段114を出て、復水器(図示せず)に流入する。
【0028】
図2は、蒸気タービン102に流入する蒸気流を制御するための、従来のシステム200を示す概略図である。図2及び本明細書における、これに関連する考察は、周知の方法論を示す。図2に示すように、システム200は、速度/負荷管理装置202を含む。速度/負荷管理装置202は、HP段110及びIP段112を通る蒸気流を制御する速度/負荷コマンドを生成する。
【0029】
図2に示すように、比較器ブロック204は、蒸気タービン102の実際の速度を蒸気タービン102の基準速度と比較した後に、エラー信号を生成する。乗算器ブロック206はその後、比較器ブロック204の出力を受信する。ここのとき、エラー信号が再び乗算され、エラー調整信号が生成される。エラー調整信号は、エラー信号と蒸気タービン102の現在の負荷との関係を確立するのに役立つ。次に、サミングジャンクション208が、乗算器ブロック206の出力、及びタービン負荷基準を受信する。サミングジャンクション208はその後、フロー基準信号を生成する。その後、最小値選択ブロック210は、サミングジャンクション208の出力を受信する。最小値選択ブロック210へのその他の入力は、入口圧力制御装置、入口圧力リミッタ、弁位置リミッタ等の、ただしこれらに限定されない、その他の機能を含み得る。最小値選択ブロック210は、入力信号を比較及び選択した後、入力信号の最も制限の厳しい値を出力する。この出力は、速度/負荷コマンドと考えられる。
【0030】
図2に示すように、速度/負荷コマンドは、制御弁116及びインターセプト弁118をストロークするための基準コマンドを生成する。続いて、システム200は、制御弁116及びインターセプト弁118に基準ストロークを付与する。この周知の方法論では、通常、ほぼ等しい蒸気流がHP段110及びIP段112を通る。この周知の方法論はまた、結果的に蒸気タービン102の操作柔軟性を減少させる可能性がある。
【0031】
図3から6は、本発明の実施例による、蒸気タービン102に流入する蒸気流を個別に制御するためのシステム及び方法を示す概略図である。上述のように、平衡流量は、各段110、112に同量の蒸気流を供給しようとする方法論及び/又は制御原理と考えられる。本発明の実施例は、不平衡流量方式及び/又は制御原理を包含する。このとき、各段110、112に流入する蒸気流を意図的に不平衡状態にすることで、蒸気タービンの動作をその真の限界まで制御することにより、タービン102の操作柔軟性を向上させることができる。このことは、リアルタイムで各段110、112に流入する蒸気流を個別に制御することによって実現可能である。本発明の実施例では、各段110、112に個別のフローリミッタ等を設けてもよい。これらのフローリミッタは、各段110、112に流入する蒸気流を実質的に制御するそれぞれの弁(CV、IV)に対して個別に作用する。
【0032】
本発明の実施例を、周知の方法論及び制御原理の一部に組み込むことができる。このことによって、蒸気タービンの各段110、112の間の蒸気流量を制限作用によって意図的に不平衡状態としながら、速度/負荷制御スキーム(等)の機能を維持できる。
【0033】
図3は、本発明の一実施例による、蒸気タービンに流入する蒸気流を制限するためのシステム300を示す概略図である。図1にも示されている制御システム106は、速度/負荷管理装置202によって生成された速度/負荷コマンドを受信する。別の実施例では、速度/負荷コマンドを受信しない制御システム106が設けられる。
【0034】
制御システム106を、第1弁116及び第2弁118を制御するように構成できる。本発明の一実施例において、制御システム106は、第1弁116及び第2弁118の速度/負荷コマンド及び基準ストロークを決定する。制御システム106を、第1段110に関わる操作パラメータと、第2段112に関わる操作パラメータを決定するようにも構成できる。操作パラメータは、軸推力、ロータ応力、蒸気圧等を含み得るが、これらに限定されない。本発明の一実施例において、操作パラメータは、少なくとも部分的に、1つ以上の物理的要件に基づく。物理的要件は、圧力、温度、流量、又はこれらを組み合わせたものを含み得るが、これらに限定されない。
【0035】
各操作パラメータを決定した後、制御システム106は、少なくとも部分的には操作パラメータに基づいて、第1弁116及び第2弁118の基準ストロークを個別に制限する。これらの操作により、速度/負荷コマンドとは無関係に、HP段110及びIP段112に流入する蒸気流を個別に制御できる。
【0036】
図3に示すように、制御システム106の一実施例は、決定された操作パラメータに基づいて、それぞれの段110、112への蒸気流を制限するように機能する、フローリミッタ302及び304を含む。フローリミッタ302は、HP段110の蒸気流を制限する制御弁フローリミッタ(以下、「CVフローリミッタ302」と称される)であってもよい。フローリミッタ304は、IP段112の蒸気流を制限するインターセプト弁フローリミッタ(以下、「IVフローリミッタ304」と称される)であってもよい。
【0037】
本発明の一実施例において、制御システム106は更に、速度/負荷コマンドとフローリミッタ302及び304の出力との間の最小値を選択する、最小値選択ブロック306及び308を含む。その後、制御システム106は、最小選択値に基づいて、制御弁116及びインターセプト弁118の基準ストロークを決定する。本発明の一実施例において、最小値選択ブロック306は、速度/負荷コマンドとCVフローリミッタ302の出力との間の最小値を選択する。ここで、制御システム106は、この最小値を利用して、制御弁116の基準ストロークを決定する。同様に、最小値選択ブロック308は、速度/負荷コマンドとIVフローリミッタ304の出力との間の最小値を選択する。そして、制御システム106は、この最小値を利用して、インターセプト弁118の基準ストロークを決定する。
【0038】
図4は、本発明の代替実施例による、蒸気タービン102に流入する蒸気流を制限するための別のシステムを示す概略図である。図4に示すように、制御システム106は、上述のように、速度/負荷管理装置202によって生成された速度/負荷コマンドを受信する。そして、制御システム106は、伝達関数アルゴリズムを使用する、リミッタモジュール402及び404を含む。リミッタモジュール402は、HP段110の蒸気流を制御するためのフローリミッタ302の要素であってもよく、リミッタモジュール404は、IP段112の蒸気流を制御するためのフローリミッタ304内に設けられてもよい。
【0039】
本発明の一実施例において、伝達関数アルゴリズムは、操作パラメータの値を決定する。伝達関数アルゴリズムは、蒸気タービン102の第1段110及び/又は第2段112への蒸気流を個別に制御するように構成される。本発明の一実施例において、伝達関数アルゴリズムは、過渡条件、発電所の状態、又は物理的条件のうち少なくとも1つに基づいて、蒸気流を制限する。物理的要件は、圧力、温度、流量、又はこれらを組み合わせたものを含み得るが、これらに限定されない。
【0040】
本発明の一実施例において、伝達関数アルゴリズムは、現在の動作条件に対応する、HP段110の最大許容可能蒸気流量及びIP段112の最大許容可能蒸気流量の値を決定するように構成される。ここで、CVフローリミッタ302は、HP段110の蒸気流を連続的に監視する。CVフローリミッタ302は、蒸気タービン102が動的動作範囲内で動作しているか否かも追跡できる。具体的には、CVフローリミッタ302は、HP段110の実際の蒸気流量を、HP段110の許容可能な蒸気流量と比較する。ここで、HP段110の現在の蒸気流量がHP段110の許容可能な蒸気流量を下回る場合、制御システム106はCVフローリミッタ302の出力を増加させる。
【0041】
使用時には、初期始動中に、CVフローリミッタ302の出力が先ず、最小値選択ブロック210によって生成された速度/負荷コマンドよりも大きい値に設定される。その後、最小値選択ブロック306は、速度/負荷コマンドとCVフローリミッタ302の出力との最小値を選択する。そのため、制御弁116は、最小値選択ブロック210からの速度/負荷コマンドに基づいて調整される。しかし、HP段110の現在の蒸気流量がHP段110の許容可能な蒸気流量を上回る場合、CVフローリミッタ302の出力は、初期設定値から変化する。HP段110の現在の蒸気流量がHP段110の許容可能な蒸気流量を下回る場合、制限動作は不要である。本発明の一実施例において、IVフローリミッタ304もまた、類似の制限動作を実行可能である。
【0042】
本発明の一実施例において、CVフローリミッタ302によって実行される制限動作は、制御弁116を通る蒸気流を制限することによってカスケードバイパス始動時又は類似の動作時に発生するロータ応力を減少させる。そのため、蒸気流量は不平衡状態となり、各段110、112がその動作範囲内で動作する。このような意図的な不平衡アプローチは、蒸気タービン102の操作柔軟性を向上させることがある。
【0043】
明らかなように、本発明は、方法、システム、又はコンピュータプログラム製品として実施可能である。したがって、本発明は、完全なハードウェアでの実施例、完全なソフトウェアでの実施例(ファームウェア、常駐ソフトウェア、マイクロコード等を含む)、又はソフトウェア及びハードウェアの態様を組み合わせた実施例の形態であってもよく、その全てが本明細書では、概して「回路」、「モジュール」、又は「システム」と称される。更に、本発明は、媒体に実装されたコンピュータ利用可能プログラムコードを有する、コンピュータ利用可能記憶媒体上のコンピュータプログラム製品の形態であってもよい。
【0044】
いずれの適当なコンピュータ読み取り可能媒体も、利用可能である。コンピュータ利用可能又はコンピュータ読み取り可能媒体は、例えば、電子、磁気、光学、電磁、赤外線、又は半導体システム、機器、装置、又は伝播媒体であってもよいが、これらに限定されない。コンピュータ読み取り可能媒体の具体例(網羅的ではないリスト)としては、1つ以上の配線を含む電気的接続、ポータブルコンピュータディスケット、ハードディスク、ランダムアクセスメモリ(RAM)、読み取り専用メモリ(ROM)、消去及びプログラム可能読み取り専用メモリ(EPROM又はフラッシュメモリ)、光ファイバ、ポータブルコンパクトディスク読み取り専用メモリ(CD−ROM)、光学記憶装置、インターネット又はイントラネットを支援する物等の電送媒体、又は磁気記憶装置が含まれる。なお、プログラムは、例えば紙又はその他の媒体を光学走査し、必要であればその後コンパイル、翻訳、又はその他適当な方法で処理し、その後コンピュータメモリに格納することによって、電子的に捕捉可能なので、コンピュータ利用可能又はコンピュータ読み取り可能媒体は、プログラムがプリントされた紙又はその他の適当な媒体であってもよい。本文献の文脈上、コンピュータ利用可能又はコンピュータ読み取り可能媒体は、命令実行システム、機器、又は装置による使用の目的の又はこれらに関連付けられたプログラムを収容、格納、通信、伝播、又は伝送可能な、いずれの媒体であってもよい。
【0045】
本発明の動作を実行するためのコンピュータプログラムコードは、Java(商標)7、Smalltalk、又はC++等のオブジェクト指向プログラミング言語で記述可能である。しかし、本発明の動作を実行するためのコンピュータプログラムコードは、「C」プログラミング言語、又は類似の言語等の、従来の手続き型プログラミング言語でも記述可能である。プログラムコードは、完全又は部分的にユーザのコンピュータ上で、スタンドアローン型ソフトウェアパッケージとして、部分的にユーザのコンピュータ上及び部分的に遠隔コンピュータ上又は完全に遠隔コンピュータ上で実行可能である。後者の場合、遠隔コンピュータは、ローカルエリアネットワーク(LAN)又は広域ネットワーク(WAN)を通じてユーザのコンピュータに接続されてもよいが、外部コンピュータに接続されてもよい(例えば、インターネットサービスプロバイダを使用してインターネット経由で接続されてもよい)。
【0046】
本発明は、本発明の実施例による方法、機器(システム)、及びコンピュータプログラム製品のフローチャート解説及び/又はブロック図を参照して、以下に記載される。フローチャート解説及び/又はブロック図の各ブロック、並びにフローチャート解説及び/又はブロック図の組み合わせは、コンピュータプログラム命令によって実行可能であることは、理解されよう。これらのコンピュータプログラム命令を、汎用コンピュータ、専用コンピュータ、又はその他のプログラム可能なデータ処理装置に提供し、マシンを作製することで、コンピュータ又はその他のプログラム可能なデータ処理装置を用いて実行される命令により、フローチャート及び/又はブロック図又はブロックに明記される機能/作用を実行する手段を形成できる。
【0047】
これらのコンピュータプログラム命令はまた、コンピュータ又はその他のプログラム可能なデータ処理装置を特定の態様で機能させる、コンピュータ読み取り可能メモリに格納されていてもよく、これによって、コンピュータ読み取り可能メモリに格納された命令で、フローチャート及び/又はブロック図又はブロックに明記された機能/作用を実行する命令手段を含む製品を構成できる。コンピュータプログラム命令が、コンピュータ又はその他のプログラム可能なデータ処理装置上にもロードされると、コンピュータ又はその他のプログラム可能な装置上で実行されるべき一連の動作ステップによってコンピュータ実行プロセスが生成され、コンピュータ又はその他のプログラム可能な装置上で実行される命令により、フローチャート及び/又はブロック図のブロックに明記する機能/作用を実行するステップが提供される。
【0048】
本発明は、蒸気タービン102に流入する蒸気流を制限する技術的効果を有する、制御システム106を含み得る。本発明は、制御弁116及びインターセプト弁118の基準ストロークを自動的に決定するように構成可能である。或いは、制御システム106は、開始動作にユーザの操作を必要とするように構成可能である。本発明の制御システム106の一実施例は、スタンドアローン型制御システムとして機能する。或いは、制御システム106は、ターボ機械制御又は蒸気発電所制御システム等の、ただしこれらに限定されない、より幅広いシステム内に、モジュール等として統合されてもよい。
【0049】
ここで図5を参照する。図5は、本発明の別の代替実施例による、蒸気タービンに流入する蒸気流を制限する方法500の一例を示すフローチャートである。方法500には、蒸気タービン等の、ただしこれに限定されない、蒸気タービン102が設けられる。本発明の一実施例において、蒸気タービン102は、発電所等の現場100に配備される蒸気タービン102を含む。蒸気タービン102は、第1段110を含む。本発明の一実施例において、蒸気タービンは、第2段112も含む。更に、ロータ115は、部分的に第1段112の内部に設けられてもよい。ロータ115の周りの流路は、第1段110内で蒸気を流体的に連通させ、ロータ115を嵌合させる。本発明の一実施例において、ロータ115は、上述のように、部分的に第1段110と第2段112との間に設けられる。本発明の一実施例において、蒸気タービン102は、第3段114も含む。第3段114は、図1に示すように、LP段114とみなされてよい。
【0050】
方法500では、第1段110を通る蒸気流を制御するために、第1弁116を操作する。方法500では、第2段112を通る蒸気流を制御するために、第2弁118を操作することもできる。ここで、第1弁116及び第2弁118は、それぞれHP段110及びIP段112に流入する蒸気流を制御する、制御弁116及びインターセプト弁118の形態であってもよい。
【0051】
ステップ510において、方法500は、速度/負荷コマンドを受信する。速度/負荷コマンドは、第1弁116の基準ストロークを提供する。本発明の一実施例において、速度/負荷コマンドは、第2弁118の基準ストロークも提供する。速度/負荷コマンドは、速度/負荷管理装置202を使用して生成される。本発明の一実施例において、方法500により、制御システム106で速度/負荷管理装置202から速度/負荷コマンドを受信できる。
【0052】
ステップ520において、方法500は、各段110、112の個別の操作パラメータを決定する。上述のように、操作パラメータは、軸推力、ロータ応力、蒸気圧等を含み得るが、これらに限定されない。これに加えて、操作パラメータは、少なくとも部分的に、圧力、温度、流量、又はこれらを組み合わせたもの等の、ただしこれらに限定されない、物理的要件に基づいてもよい。本発明の一実施例において、この方法により、制御システム106で操作パラメータを決定できる。操作パラメータは、速度/負荷コマンドに応じて第1弁116の基準ストロークを制限するように構成される。本発明の一実施例において、操作パラメータは、速度/負荷コマンドに応じて第1弁116及び第2弁118の基準ストロークを制限するように構成される。
【0053】
ステップ530において、方法500は、速度/負荷コマンドと操作パラメータとの間の最小値を選択する。
【0054】
ステップ540において、方法500は、最小選択値に基づいて、各段110、112への蒸気流入を制限する。ここで、制御システム106は、速度/負荷コマンドとは無関係に、最小値に基づいて第1弁116及び第2弁118の基準ストロークを選択する。
【0055】
方法500の一実施例には、操作パラメータの値、又は値の範囲を決定するための伝達関数アルゴリズムが含まれる。伝達関数アルゴリズムは、蒸気タービン102の第1段110及び第2段112のうち少なくとも1つへの蒸気流を個別に制限するように構成される。本発明の一実施例において、伝達関数アルゴリズムは、HP段110及び/又はIP段112への蒸気流を個別に制限するように構成される。
【0056】
図6は、本発明の一実施例による、蒸気タービン102に流入する蒸気流を制限するための制御システム106の非限定例のブロック図である。本発明の一実施例は、図6には示していない制御手段等によって実行可能である。この制御手段には、機械システム、空気圧システム、アナログシステム、電気機械システム、電気システム、電子システム、デジタルシステム、又はこれらを組み合わせたもの等が含まれるが、これらに限定されない。
【0057】
図6を参照すると、方法500の各要素は、制御システム106内に実装されるか、又は制御システム106によって実行される。制御システム106は、1つ以上のユーザ又はクライアント通信装置602、又は類似のシステム又は装置を含む(図6には2つ示す)。各通信装置602は、例えばコンピュータシステム、携帯端末、携帯電話、又は電子メッセージを送受信可能な類似の装置であってもよいが、これらに限定されない。
【0058】
通信装置602は、システムメモリ604又はローカルファイルシステムを含む。システムメモリ604は、例えば読み取り専用メモリ(ROM)及びランダムアクセスメモリ(RAM)を含むが、これらに限定されない。ROMは、基本入出力システム(BIOS)を含む。BIOSは、通信装置602の要素又は部品間での情報伝達に役立つ、基本ルーチンを収容する。システムメモリ604は、通信装置602の全体的な動作を制御するためのオペレーティングシステム606を収容する。システムメモリ604は更に、ブラウザ608又はウェブブラウザも含み得る。システムメモリ604は更に、図5の方法500と類似の、又は図5の方法500の要素を含む、蒸気タービン102に流入する蒸気流を制限するためのデータ構造610又はコンピュータ実行可能コードも含み得る。
【0059】
システムメモリ604は更に、蒸気タービン102に流入する蒸気流を制限するための、及び蒸気タービン102の操作柔軟性を向上させるための、図5の方法500と併用されるテンプレートキャッシュメモリ612を含み得る。
【0060】
通信装置602は更に、通信装置602の別の部品の動作を制御するプロセッサ又は処理ユニット614も含み得る。オペレーティングシステム606、ブラウザ608、及びデータ構造610は、処理ユニット614上で動作可能である。処理ユニット614は、システムバス616によって、メモリシステム604及び通信装置602のその他の構成要素に結合される。
【0061】
通信装置602は更に、複数の入力装置(I/O)、出力装置、又は複合入出力装置618も含み得る。各入出力装置618は、入出力インターフェース(図示せず)によって、システムバス616に結合される。入力装置及び出力装置、又は複合入出力装置618は、蒸気タービン102に流入する蒸気流を制限するために、ユーザが通信装置602を操作してこれとインターフェース接続を行うことと、ソフトウェアにアクセスするための並びにソフトウェアを操作及び制御するためのブラウザ608及びデータ構造610を制御することを許可する。入出力装置618は、本明細書で論じた動作を実行する、キーボード、コンピュータポインティングデバイス等を含む。
【0062】
入出力装置618は、例えばディスクドライブ、光学、機械、磁気、又は赤外線入出力装置、モデム等も含むが、これらに限定されない。入出力装置618を使用して、記憶媒体620にアクセスできる。媒体620は、通信装置602等のシステムにより使用するための、或いは、通信装置602等のシステムと組み合わせて使用するための、コンピュータ読み取り可能又はコンピュータ実行可能命令又はその他の情報を、収容、格納、通信、又は伝送可能である。
【0063】
通信装置602はまた、ディスプレイ又はモニタ622等のその他の装置を含むか又はこれに接続されてもよい。モニタ622により、ユーザは通信装置602と通信できる。
【0064】
通信装置602は更に、ハードドライブ624も含み得る。ハードドライブ624は、ハードドライブインターフェース(図示せず)によってシステムバス616に結合されてもよい。ハードドライブインターフェース624はまた、ローカルファイルシステム又はシステムメモリ604の一部を形成してもよい。通信装置602を動作させるにあたり、プログラム、ソフトウェア、及びデータを、システムメモリ604とハードドライブ624との間で伝送及び交換してもよい。
【0065】
通信装置602は、ユニット制御装置626と通信可能であり、ネットワーク628を介して通信装置602と類似のその他のサーバ又はその他の通信装置にアクセスできる。システムバス616は、ネットワークインターフェース630によってネットワーク628に結合されてもよい。ネットワークインターフェース630は、ネットワーク628に結合するための、モデム、イーサネット(商標)カード、ルータ、ゲートウェイ等であってもよい。結合は、有線又は無線接続であってもよい。ネットワーク628は、インターネット、プライベートネットワーク、イントラネット等であってもよい。
【0066】
ユニット制御装置626は、ファイルシステム、ROM、RAM等を含み得るシステムメモリ632も含み得る。システムメモリ632は、通信装置602のオペレーティングシステム606と類似のオペレーティングシステム634を含み得る。システムメモリ632は更に、蒸気タービン102に流入する蒸気流を制限するためのデータ構造636も含み得る。データ構造636は、蒸気タービン102に流入する蒸気流を制限するための、及び発電所の操作柔軟性を向上させるための、方法500に関連して記載されたものと類似の動作を含み得る。サーバシステムメモリ632は、その他のファイル638、アプリケーション、モジュール等も含み得る。
【0067】
ユニット制御装置626は、ユニット制御装置626のその他の装置の動作を制御するための、プロセッサ又は処理ユニット642も含み得る。ユニット制御装置626は、入出力装置644も含み得る。入出力装置644は、通信装置602の入出力装置618と類似であってよい。ユニット制御装置626は、入出力装置644とともにユニット制御装置626にインターフェースを提供するための、モニタ等のその他の装置646も含み得る。ユニット制御装置626は、ハードディスクドライブ648も含み得る。システムバス650で、ユニット制御装置626の別々の部品を接続できる。ネットワークインターフェース652は、システムバス650を介して、ユニット制御装置626をネットワーク628に結合できる。
【0068】
図中のフローチャート及びステップ図は、本発明の様々な実施例によるシステム、方法、及びコンピュータプログラム製品に可能な実装のアーキテクチャ、機能性、及び動作を示す。この点に関して、フローチャート又はステップ図の各ステップは、明記した論理機能を実行するための1つ以上の実行可能な命令を含む、モジュール、セグメント、又はコードの一部を表し得る。なお、幾つかの代替的実装において、ステップに記載されている機能を、図示のものとは異なる順序で行ってもよい。例えば、連続して図示した2つのステップを、実際には、ほぼ同時に実行してもよく、或いは場合によっては、付随する機能性に応じて、ステップを逆の順序で実行してもよい。ブロック図及び/又はフローチャート解説の各ステップ、並びにブロック図及び/又はフローチャート解説のステップの組み合わせは、明記した機能又は作用を実行する専用のハードウェアベースシステム、又は専用のハードウェア及びコンピュータ命令の組み合わせによって実現可能である。
【0069】
本明細書では、特定の実施形態を図示及び記述したが、当業者には明らかなように、同一の目的を達成すると予測されるあらゆる配置で、提示した特定の実施形態を置換することができ、本発明は、その他の環境におけるその他の用途も有する。本願は、本発明のいかなる改変又は変形も包含することを意図している。添付の特許請求の範囲は、本発明の範囲を、本明細書に開示した特定の実施形態に限定することを決して意図していない。
【0070】
当業者には明らかなように、幾つかの実施形態に関連して上述した多数の様々な特徴及び構成を更に、本発明に可能なその他の実施形態を形成するべく選択的に適用することができる。また、下記の幾つかの請求項その他が包含するあらゆる組み合わせ及び可能性のある実施形態は、本願の一部分であることを意図しているとしても、本発明の、繰り返しとなり得るものは全て、詳細に提示又は論述されていないことは、当業者に理解できよう。また、本発明の幾つかの実施形態についての以上の記述から、当業者は改良、変更、及び修正を想到可能であろう。当業者に想到可能な、こうした改良、変更、及び修正も、添付の特許請求の範囲に含まれることを意図している。更に、明らかなように、上述の内容は、記述した本願の実施形態のみに関するもので、本明細書では、添付の特許請求の範囲に定義した本願の概念及び範囲、並びにその等価物の概念及び範囲から逸脱することなく、多数の変更及び修正が可能である。
【特許請求の範囲】
【請求項1】
ターボ機械に流入する蒸気流を制限する方法(500)であって、
第1段(112)及び第2段(114)の内部に設けられたロータ(115)を備えたターボ機械(102)を準備するステップであって、前記ロータ(115)の周りの流路は、蒸気を前記第1段(112)及び前記第2段(114)の間で流体的に連通させるステップと、
前記第1段(112)に流入する蒸気流を制御するように構成された第1弁(116)、及び前記第2段(114)に流入する蒸気流を制御するように構成された第2弁(118)を準備するステップと、
前記第1弁(116)及び前記第2弁(118)に基準ストロークを提供するコマンド(510)を受信するステップと、
操作パラメータ(520)を決定するステップであって、前記操作パラメータ(520)は前記コマンドに応じて前記基準ストロークを制限するステップと、を含み、
前記操作パラメータ(520)は、前記コマンドとは無関係に、前記第1段(112)又は前記第2段(114)のうち少なくとも1つへの前記蒸気流を制御する、方法(500)。
【請求項2】
前記コマンドと前記操作パラメータとの間の最小値を選択するステップ(530)を更に含み、前記最小値は、前記第1弁(116)及び前記第2弁(118)の基準ストロークを決定する、請求項1に記載の方法(500)。
【請求項3】
前記ターボ機械(102)が蒸気タービン(102)を含む、請求項2に記載の方法(500)。
【請求項4】
前記操作パラメータは、圧力、温度、流量、又はこれらを組み合わせたもののうち少なくとも1つを含む物理的要件に基づく、請求項3に記載の方法(500)。
【請求項5】
前記操作パラメータは、軸推力、ロータ応力、蒸気圧、又は物理的範囲のうち少なくとも1つを含む、請求項4に記載の方法(500)。
【請求項6】
前記操作パラメータの値は、前記第1段(112)又は前記第2段(114)のうち少なくとも1つへの前記蒸気流を個別に制限するように構成された伝達関数アルゴリズムによって決定される、請求項5に記載の方法(500)。
【請求項7】
前記伝達関数アルゴリズムは、過渡条件、プラント状態、又は物理的要件のうち少なくとも1つに基づいて前記蒸気流を制限する、請求項6に記載の方法(500)。
【請求項8】
前記第1段(112)がHP段(112)を含み、前記第2段(114)がIP段(114)を含む、請求項3に記載の方法(500)。
【請求項9】
発電所の操作柔軟性を向上させる方法(500)であって、
蒸気タービン(102)を備える発電所を準備するステップであって、前記蒸気タービン(102)は、HP段(112)及び該HP段の内部に部分的に設けられたロータ(115)を備え、ロータ(115)の周りの流路は、蒸気を前記HP段(112)内で流体的に連通させるとともに前記ロータ(115)を嵌合させる、ステップと、
前記HP段(112)に流入する蒸気流を制御するように構成された第1弁(116)を準備するステップと、
速度/負荷コマンド(510)を受信するステップであって、前記速度/負荷コマンドは、前記第1弁(112)に基準ストロークを提供するステップと、
操作パラメータ(520)を決定するステップであって、前記操作パラメータは、前記速度/負荷コマンドに応じて前記第1弁(112)の前記ストロークを制限するように構成されているステップと、を含み、
前記操作パラメータは、前記速度/負荷コマンドとは無関係に、前記HP段(112)への前記蒸気流を制御する、方法(500)。
【請求項10】
発電所の操作柔軟性を向上させるシステム(100)であって、
蒸気タービン(102)を備える発電所であって、前記蒸気タービン(102)は、ハウジング(112、114)及び該ハウジングの内部に部分的に設けられたロータ(115)を備え、前記ロータ(115)の周りの流路は、前記ハウジング内で蒸気を移動させるとともに前記ロータ(115)を嵌合させる、発電所と、
前記ハウジング(112、114)に流入する蒸気流を制御するように構成された第1弁(116)と、
制御システム(106)であって、
速度/負荷コマンド(510)を受信するステップであって、前記速度/負荷コマンドは、前記第1弁(116)に基準ストロークを提供するステップと、
操作パラメータ(520)を決定するステップであって、前記操作パラメータは、前記速度/負荷コマンドに応じて前記第1弁(116)の前記ストロークを制限するように構成されているステップと、を実行するように構成された制御システム(106)と、を含み、
前記操作パラメータは、前記速度/負荷コマンドとは無関係に、前記第1弁(118)の前記基準ストロークを制御する、システム(100)。
【請求項1】
ターボ機械に流入する蒸気流を制限する方法(500)であって、
第1段(112)及び第2段(114)の内部に設けられたロータ(115)を備えたターボ機械(102)を準備するステップであって、前記ロータ(115)の周りの流路は、蒸気を前記第1段(112)及び前記第2段(114)の間で流体的に連通させるステップと、
前記第1段(112)に流入する蒸気流を制御するように構成された第1弁(116)、及び前記第2段(114)に流入する蒸気流を制御するように構成された第2弁(118)を準備するステップと、
前記第1弁(116)及び前記第2弁(118)に基準ストロークを提供するコマンド(510)を受信するステップと、
操作パラメータ(520)を決定するステップであって、前記操作パラメータ(520)は前記コマンドに応じて前記基準ストロークを制限するステップと、を含み、
前記操作パラメータ(520)は、前記コマンドとは無関係に、前記第1段(112)又は前記第2段(114)のうち少なくとも1つへの前記蒸気流を制御する、方法(500)。
【請求項2】
前記コマンドと前記操作パラメータとの間の最小値を選択するステップ(530)を更に含み、前記最小値は、前記第1弁(116)及び前記第2弁(118)の基準ストロークを決定する、請求項1に記載の方法(500)。
【請求項3】
前記ターボ機械(102)が蒸気タービン(102)を含む、請求項2に記載の方法(500)。
【請求項4】
前記操作パラメータは、圧力、温度、流量、又はこれらを組み合わせたもののうち少なくとも1つを含む物理的要件に基づく、請求項3に記載の方法(500)。
【請求項5】
前記操作パラメータは、軸推力、ロータ応力、蒸気圧、又は物理的範囲のうち少なくとも1つを含む、請求項4に記載の方法(500)。
【請求項6】
前記操作パラメータの値は、前記第1段(112)又は前記第2段(114)のうち少なくとも1つへの前記蒸気流を個別に制限するように構成された伝達関数アルゴリズムによって決定される、請求項5に記載の方法(500)。
【請求項7】
前記伝達関数アルゴリズムは、過渡条件、プラント状態、又は物理的要件のうち少なくとも1つに基づいて前記蒸気流を制限する、請求項6に記載の方法(500)。
【請求項8】
前記第1段(112)がHP段(112)を含み、前記第2段(114)がIP段(114)を含む、請求項3に記載の方法(500)。
【請求項9】
発電所の操作柔軟性を向上させる方法(500)であって、
蒸気タービン(102)を備える発電所を準備するステップであって、前記蒸気タービン(102)は、HP段(112)及び該HP段の内部に部分的に設けられたロータ(115)を備え、ロータ(115)の周りの流路は、蒸気を前記HP段(112)内で流体的に連通させるとともに前記ロータ(115)を嵌合させる、ステップと、
前記HP段(112)に流入する蒸気流を制御するように構成された第1弁(116)を準備するステップと、
速度/負荷コマンド(510)を受信するステップであって、前記速度/負荷コマンドは、前記第1弁(112)に基準ストロークを提供するステップと、
操作パラメータ(520)を決定するステップであって、前記操作パラメータは、前記速度/負荷コマンドに応じて前記第1弁(112)の前記ストロークを制限するように構成されているステップと、を含み、
前記操作パラメータは、前記速度/負荷コマンドとは無関係に、前記HP段(112)への前記蒸気流を制御する、方法(500)。
【請求項10】
発電所の操作柔軟性を向上させるシステム(100)であって、
蒸気タービン(102)を備える発電所であって、前記蒸気タービン(102)は、ハウジング(112、114)及び該ハウジングの内部に部分的に設けられたロータ(115)を備え、前記ロータ(115)の周りの流路は、前記ハウジング内で蒸気を移動させるとともに前記ロータ(115)を嵌合させる、発電所と、
前記ハウジング(112、114)に流入する蒸気流を制御するように構成された第1弁(116)と、
制御システム(106)であって、
速度/負荷コマンド(510)を受信するステップであって、前記速度/負荷コマンドは、前記第1弁(116)に基準ストロークを提供するステップと、
操作パラメータ(520)を決定するステップであって、前記操作パラメータは、前記速度/負荷コマンドに応じて前記第1弁(116)の前記ストロークを制限するように構成されているステップと、を実行するように構成された制御システム(106)と、を含み、
前記操作パラメータは、前記速度/負荷コマンドとは無関係に、前記第1弁(118)の前記基準ストロークを制御する、システム(100)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−127350(P2012−127350A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−272982(P2011−272982)
【出願日】平成23年12月14日(2011.12.14)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2011−272982(P2011−272982)
【出願日】平成23年12月14日(2011.12.14)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]