
ターボ機械の温度制御
【課題】ターボ機械(15)の温度制御のための方法、システム、およびコンピュータプログラムを提供すること。
【解決手段】この方法は、計算装置(30)を使用して、作動中のターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップ(S1)と、計算装置(30)を使用して、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するステップ(S2)と、ユーザ(50)に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップ(S3)とを含む。
【解決手段】この方法は、計算装置(30)を使用して、作動中のターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップ(S1)と、計算装置(30)を使用して、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するステップ(S2)と、ユーザ(50)に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップ(S3)とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、ターボ機械の作動パラメータの監視に関する。より詳細には、本発明は、ターボ機械の作動中に温度制御を行うシステムおよび方法に関する。
【背景技術】
【0002】
ターボ機械システムは、複雑であり、通常、作動負荷の広い変化に亘って、多数のパラメータを自動的に制御する必要がある。たとえば、タービンシステムおよびターボ発電機を備える発電システムについて、タービン自体の様々な構造の温度を制御しなければならない。通常、ターボ機械システムおよびその部品は、ターボ機械の作動中に存在する過酷な環境による熱応力を受ける。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第7742904号公報
【発明の概要】
【課題を解決するための手段】
【0004】
本開示の第1の態様は、ターボ機械の温度を制御する方法であって、計算装置を使用して、作動中のターボ機械の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップと、計算装置を使用して、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械の対応するTexh、Tfire、およびTrise作動限界値と比較するステップと、ユーザに対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップとを含む方法を提供する。
【0005】
本開示の第2の態様は、ターボ機械用の温度制御システムであって、作動中のターボ機械の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取る受け取り部と、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械の対応するTexh、Tfire、およびTrise作動限界値と比較するコンパレータと、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成する処置生成部とを備える少なくとも1つの装置を具備する温度制御システムを提供する。
【0006】
本開示の第3の態様は、実行されると、コンピュータシステムがターボ機械の温度制御方法を実施できるようにする、少なくとも1つのコンピュータ可読媒体内で具体化されたプログラムコードを備えるコンピュータプログラムであって、その方法が、計算装置を使用して、作動中のターボ機械の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップと、計算装置を使用して、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械の対応するTexh、Tfire、およびTrise作動限界値と比較するステップと、ユーザに対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップとを含むコンピュータプログラムを提供する。
【0007】
本発明の他の態様は、本明細書に記載の機能の一部または全てを含み、かつ/または実行する方法、システム、プログラム製品、およびそれぞれを使用し生成する方法を提供する。本発明の例示的態様は、本明細書に記載の1つまたは複数の問題、および/または記載されていない1つまたは複数の他の問題を解決するように考えられている。
【0008】
本発明のこれらおよび他の特徴は、本発明の様々な実施形態を示す添付図面と併せて、本発明の様々な態様の以下の詳細な記述からより容易に理解されよう。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態による、ターボ機械の温度制御システムを実装するための例示的環境のブロックダイアグラムである。
【図2】本発明の実施形態による、ターボ機械の温度を制御する方法のフローダイアグラムである。
【図3】本発明の実施形態による、ターボ機械の温度を制御する方法に関するターボ機械作動領域のグラフである。
【図4】本発明の実施形態による、ターボ機械の温度を制御する方法に関するターボ機械作動領域の別のグラフである。
【図5】本発明の実施形態による、ターボ機械の温度を制御する方法に関するターボ機械作動領域の別のグラフである。
【図6】本発明の実施形態による制御システムを有するタービンの概略図である。
【図7】本発明の実施形態による、タービン、モデルおよびカルマンフィルタモデル修正推定機構の高位のブロックダイアグラムである。
【図8】本発明の実施形態によるカルマンフィルタモデル修正推定機構のより詳細なフローチャートのブロックダイアグラムである。
【発明を実施するための形態】
【0010】
図面は一定の縮尺とは限らないことに留意されたい。図面は、本発明の典型的な態様のみを描くように意図されており、したがって、本発明の範囲を限定するものと考えるべきではない。諸図面では、図面間で同様な番号は同様な要素を表す。
【0011】
ターボ機械システムは、複雑であり、通常、作動負荷の広い変化に亘って、多数のパラメータを自動的に制御する必要がある。たとえば、タービンの様々な構造の温度を制御する必要がある。従来、ターボ機械のパラメータが測定され、ターボ機械制御システムにフィードバックされ、ターボ機械制御システムが、測定されたパラメータに基づいてあらゆる必要な自動制御を行っている。その測定およびフィードバック体系は、多数のパラメータに適している。しかし、ターボ機械の複雑さのために、また、様々なパラメータが他のパラメータに直接または間接にいかに影響を及ぼすかによって、より様々なパラメータをより強固な態様で用いる制御システムの開発には多数の難題を伴う。
【0012】
本発明の実施形態が、方法、装置(システム)およびコンピュータプログラム製品のフローダイアグラム図および/またはブロックダイアグラムを参照しながら、本明細書に記載される。フローダイアグラム図および/またはブロックダイアグラムの各ブロック、ならびにフローダイアグラム図および/またはブロックダイアグラムのブロックの組合せは、コンピュータプログラム命令によって実行することができることが理解されるであろう。これらコンピュータプログラム命令は、汎用コンピュータ、特定用途コンピュータ、または他のプログラム可能なデータ処理装置の処理構成要素に発せられて一機構を創出し、それによって、コンピュータまたは他のプログラム可能なデータ処理装置の処理構成要素を介して実行される命令が、フローダイアグラムおよび/またはブロックダイアグラムの1つまたは複数のブロックに規定されている機能/働きを実行する手段を生成する。
【0013】
これらコンピュータプログラム命令はまた、コンピュータまたは他のプログラム可能なデータ処理装置を特定の態様で機能させることができるコンピュータ可読媒体に格納することもでき、それによって、コンピュータ可読媒体に格納された命令が、フローダイアグラムおよび/またはブロックダイアグラムの1つまたは複数のブロックの機能/働きを実行する命令手段を含む製品を作り出す。
【0014】
コンピュータプログラム命令はまた、それをコンピュータまたは他のプログラム可能なデータ処理装置にロードし、一連の作動ステップをコンピュータまたは他のプログラム可能な装置上で実行させるようにして、コンピュータ実行プロセスを生成することができ、それによって、コンピュータまたは他のプログラム可能な装置上で実行される命令が、フローダイアグラムおよび/またはブロックダイアグラムの1つまたは複数のブロックに規定されている機能/働きを実行するプロセスを形成する。
例示的環境
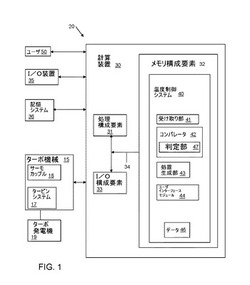
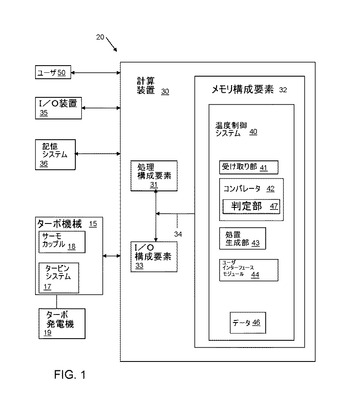
図1を参照すると、作動中のターボ機械15の温度の制御に関する例示的環境が、本発明の実施形態に従って示されている。この場合は、環境は、様々な制御システムに関し本明細書に記載されている様々な処理ステップを実行することができるコンピュータインフラストラクチャ20を備える。たとえば、コンピュータインフラストラクチャ20は、他の構成要素の中でも、温度制御システム40を備える計算装置30を備えるところが示されており、温度制御システム40は、計算装置30が、本明細書に記載される処理ステップを実行することによって、作動中にターボ機械15の温度制御を実施することを可能にする。
【0015】
計算装置30はターボ機械15と通信することが示されている。一実施形態では、ターボ機械15は、ターボ発電機19に結合されたタービンシステム17を備える。当業者は、タービンシステム17およびターボ発電機19が、タービンシステム17およびターボ発電機19の作動に必要な既知または今後開発されるあらゆる構造を備えることができることを理解するであろう。たとえば、タービンシステム17は、任意の数の低、中間、または高圧部を有するガスタービンおよび/または蒸気タービンなどを備え得る。
【0016】
タービンシステム17は、N.Y.州スケネクタディのGeneral Electric Companyから市販されている、9FBエンジンと呼称されることもあるMS9001FBエンジンのような燃焼タービンエンジンを備え得る。本発明は、いずれか1つの特定エンジンには限定されず、たとえば、General Electric CompanyのMS7001FA(7FA)およびMS9001FA(9FA)、GE 90ならびにLMS100エンジンモデルを含む他のエンジンに関して使用することもできる。他の例ではまた、F119Pratt and Whitney軍用エンジンならびに8000Hシーメンス機を含む。
【0017】
さらに、計算装置30はユーザ50と通信することが示されている。ユーザ50は、たとえば、プログラマ、運転者、または別のコンピュータシステムであり得る。前記と計算装置30との間の対話については本明細書で説明する。
【0018】
計算装置30は、処理構成要素31(たとえば1つまたは複数のプロセッサ)、メモリ構成要素32(たとえば記憶階層)、入力/出力(I/O)構成要素33(たとえば1つまたは複数のI/Oインターフェースおよび/または装置)、およびバスなどの通信経路34を備えるところが示されている。さらに、計算装置30は、外部I/O装置/リソース35および記憶システム36と通信することが示されている。一実施形態では、処理構成要素31は、メモリ構成要素32および/または記憶システム36に少なくとも部分的に格納することができる、温度制御システム40などのプログラムコードを実行することができる。
【0019】
温度制御システム40の実施形態の作業を実行させるコンピュータプログラムコードは、Java(商標)、Smalltalk、C++などのようなオブジェクト指向プログラム言語、および「C」プログラム言語または同様なプログラム言語のような従来の手続き型プログラム言語を含めて、1つまたは複数のプログラム言語のいかなる組合せででも書くことができる。プログラムコードは、完全にユーザのコンピュータ上、部分的にユーザのコンピュータ上、独立型のソフトウェアパッケージとして、部分的にユーザのコンピュータ上で部分的に遠隔コンピュータ上、または完全に遠隔コンピュータもしくはサーバ上で実行することができる。後者の場合には、遠隔コンピュータは、ローカルエリアネットワーク(LAN)または広域ネットワーク(WAN)を含む任意のタイプのネットワークを介してユーザのコンピュータに接続することができ、あるいは、外部コンピュータに接続を行うこともできる(たとえばインターネットサービスプロバイダを使用しインターネットを介して)。
【0020】
プログラムコードを実行している間、処理構成要素31はデータを処理することができ、その結果、その後の処理のために、ターボ機械15の排気温度データ、燃焼温度データ、燃焼器温度上昇データ、および対応する作動限界値データなどのデータを、メモリ構成要素32、記憶システム36、および/またはI/O構成要素33から/へ読取りおよび/または書き込むことができる。通信経路34は、計算装置30内のそれぞれの構成要素間に通信リンクを形成する。I/O構成要素33は、ユーザ50が計算装置30と対話することを可能にする1つまたは複数の対人I/O装置または記憶装置、および/または、ユーザ50が任意のタイプの通信リンクを使用して計算装置30と通信することを可能にする1つまたは複数の通信装置を備え得る。この場合、温度制御システム40は、人間および/またはユーザ50が温度制御システム40と対話することを可能にする1組のインターフェース(たとえばグラフィカルユーザインターフェース(複数可)、アプリケーションプログラムインターフェースなど)を管理することができる。さらに、温度制御システム40は、任意の手法を使用して、それらに限定されないがターボ機械15の排気温度データ、燃焼温度データ、燃焼器温度上昇データ、対応する作動限界値などのデータ46を管理(たとえば記憶、回収、生成、操作、組織化、表示など)することができる。
【0021】
I/O装置35は、ユーザ50が計算装置30と対話することを可能にするあらゆる装置、または計算装置30が1つまたは複数の他の計算装置と通信することを可能にするあらゆる装置を備え得る。I/O装置35(それらに限定されないが、キーボード、ディスプレイ、ポインティングデバイスなどを含む)は、直接にまたは介在するI/O制御部を介してのいずれかで計算装置30に結合することができる。
【0022】
少なくとも、計算装置30は、それにユーザ50によってインストールされた温度制御システム40などのプログラムコードを実行することができる1つまたは複数の汎用計算用製品(たとえば計算装置)を備え得る(たとえば、パーソナルコンピュータ、サーバ、携帯端末など)。本明細書に使用される限り、プログラムコードは、情報処理能力を有する計算装置に、直接または以下の事項の任意の組合せ後のいずれかで特定の機能を実行させる任意の言語、コード、または表記での命令のあらゆる集合体を意味し得ると理解されたい。以下の事項とは、(a)別の言語、コード、または表記への変換、(b)異なるマテリアル形態での再生、および/または(c)解凍である。この場合、温度制御システム40は、システムソフトウェア、および/またはアプリケーションソフトウェアのあらゆる組合せとして実現することができる。
【0023】
さらに、温度制御システム40、および本明細書に記載された様々な制御システムはまた、たとえばターボ機械の全体制御システムの一部として、方法(複数可)または計算プログラム製品(複数可)として実現することもできることを、当業者は理解するであろう。したがって、本発明の実施形態は、完全にハードウェアの実施形態、完全にソフトウェアの実施形態(ファームウェア、常駐ソフトウェア、マイクロコードなどを含む)、またはソフトウェアとハードウェア態様を組み合わせた実施形態の形を取ることができ、本明細書では、それらは全て一般に、回路、モジュール、またはシステムと呼称することができる。
【0024】
少なくとも、計算装置30の技術的効果は、作動中のターボ機械15の温度を制御する処理命令を発することである。計算装置30の別の実施形態では、計算装置30は、温度制御システム40を介し、それらには限定されないが、排気温度、燃焼温度、および燃焼器温度上昇データを含めて、ターボ機械15に関する作動パラメータを監視し、記録し、追跡することができる。
【0025】
さらに、温度制御システム40は、受け取り部41、コンパレータ42、および処置生成部43などの一連のモジュールを使用して実行され得る。この場合、モジュールは、計算装置30が、温度制御システム40によって用いられる一連のタスクを実行することを可能にすることができ、温度制御システム40の他の部分から離れて独立に展開および/または実行することができる。温度制御システム40は、特定用途機/ハードウェアおよび/またはソフトウェアを備えるモジュールを具備し得る。いずれにしても、2つ以上のモジュールおよび/またはシステムが、それらのそれぞれのハードウェアおよび/またはソフトウェアの一部/全てを共有することができることを理解されたい。
【0026】
本明細書で使用される用語「構成要素」は、あらゆる手法を用いてその形態に関して記載された機能を実行する、ソフトウェアを有しまたは有さない、ハードウェアのあらゆる形態を意味し、他方、モジュールという用語は、計算装置30が計算装置30に関して記載された機能をあらゆる手法を用いて実行することを可能にするプログラムコードを意味する。処理構成要素31を備える計算装置30のメモリ構成要素32内に格納されたとき、モジュールは、機能を実行する構成要素の実質的な一部分になる。いずれにしても、2つ以上の構成要素、モジュールおよび/またはシステムが、それらのそれぞれのハードウェアおよび/またはソフトウェアの一部/全てを共有することができることを理解されたい。さらに、本明細書で説明される機能の一部は、実行されないこともあり、あるいは、追加の機能を計算装置30の一部として備えることもあることを理解されたい。計算装置30が複数の計算装置を備えるとき、各計算装置は、温度制御システム40の一部分(たとえば1つまたは複数のモジュール)のみをそれに包含して有することもある。
【0027】
ただし、計算装置30および温度制御装置40は、本発明の様々な処理ステップを実行することができる様々な可能な等価の計算装置を単に表していることを理解されたい。これについて、他の実施形態では、計算装置30は、特定の機能を果たすためのハードウェアおよび/またはコンピュータプログラムコードを備える任意の特定用途計算用製品、特定用途ハードウェア/ソフトウェアと汎用ハードウェア/ソフトウェアとの組合せを備える任意の計算用製品などを備え得る。それぞれの場合、プログラムコードおよびハードウェアは、標準的なプログラム技法および技術的技法それぞれを用いて生成することができる。
【0028】
同様に、コンピュータインフラストラクチャ20は、本明細書に記載の発明(複数可)を実行するための様々なタイプのコンピュータインフラストラクチャの例示に過ぎない。たとえば、一実施形態では、コンピュータインフラストラクチャ20は、本明細書に記載の様々な処理ステップを実行するために、ネットワーク、共有メモリなどのあらゆるタイプの有線および/または無線通信リンク上で通信する2つ以上の計算装置(たとえばサーバクラスタ)を備え得る。通信リンクがネットワークを備えるとき、そのネットワークは、1つまたは複数のタイプのネットワーク(たとえばインターネット、広域ネットワーク、ローカルエリアネットワーク、仮想私設ネットワークなど)の任意の組合せを備え得る。
【0029】
また、介在する私設ネットワークまたはパブリックネットワークを介して他のデータ処理システムまたは遠隔プリンタもしくは記憶装置にデータ処理システムを結合することを可能にするために、ネットワークアダプタが、システムに結合され得る。モデム、ケーブルモデム、およびイーサーネットカードが、ほんのいくつかの現在利用可能なタイプのネットワークアダプタであり得る。いずれにしても、計算装置間の通信には、様々なタイプの伝送技法の任意の組合せを使用することができる。
【0030】
温度制御システム40は、計算装置30が、ターボ機械15の温度を制御する処理命令を発することを可能にする。温度制御システム40は、ターボ機械15、特にタービンシステム17のガスタービンを、ターボ機械15を損傷し得る温度制限値を超えることから保護するために設けられる。受け取り部41は、作動中のターボ機械15の温度パラメータを受け取る。たとえば、受け取り部41は、排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取ることができる。
【0031】
本発明の実施形態では、Texhは、ターボ機械15から出る排気ガスの直の温度を表し得る。Tfireは、ターボ機械15の燃焼器(図示せず)の燃焼温度を表し得る。Triseは、ターボ機械15の燃焼器を通しての温度上昇を表し得る。一実施形態では、受け取り部41はまた、作動中のターボ機械15の温度を制御するために使用することができる、作動中のターボ機械15の任意の数の追加の温度パラメータおよび対応する作動限界値を受け取ることができる。
【0032】
受け取り部41は、ターボ機械15の温度パラメータおよび対応する作動限界値を受け取る。一実施形態では、受け取り部41は、Texh、Tfire、およびTriseパラメータ、ならびに対応するTexh、Tfire、およびTrise作動限界値を受け取ることができる。受け取り部41はまた、ターボ機械15の作動、特に温度制御に関係し得る、既知または今後分かる任意の、ターボ機械15の温度パラメータデータおよび/または作動限界値データを受け取ることができる。
【0033】
受け取り部41は、温度パラメータおよび対応する作動限界値をユーザ50から受け取ることもできる。たとえば、ユーザ50は、Texh、Tfire、およびTrise作動限界値を別の計算用製品から計算装置30へ入力する運転者またはプログラマでもよい。あるいは、ユーザ50は、Texh、Tfire、およびTriseパラメータおよび対応する作動限界値をI/O構成要素33を介して計算装置30に送る別のコンピュータシステムの外部計算装置(複数可)でもよい。さらに、ユーザ50は、本明細書に記載のように計算装置30にリンクしてもよく、ターボ機械15の作動、特に温度制御に関係し得る、既知または今後分かる任意の、ターボ機械15の温度パラメータデータおよび/または作動限界値データを、任意の従来の態様で、提供することもできる。したがって、受け取り部41は、上記のいずれをも受け取ることができる。
【0034】
コンパレータ42は、Texh、Tfire、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較する。一実施形態では、コンパレータ42は、さらに判定部47を備え得、判定部47は、Texh、Tfire、およびTriseパラメータが、作動中のターボ機械15のTexh、Tfire、およびTrise作動限界値を超えるか否かを判定する。別の実施形態では、判定部47は、任意の温度パラメータが、ターボ機械15のその対応する作動限界値を超えるか否かを判定することができる。さらに別の実施形態では、判定部47は、任意の温度パラメータが、ターボ機械15のその対応する作動限界値を、所定の温度値だけ超えるか否かを判定することができる。その温度値は、たとえば5℃、10℃、15℃などの値であり得る。
【0035】
コンパレータ42はまた、ターボ機械15の作動、特に温度制御に関係し得る、既知または今後分かる任意の、ターボ機械15の温度パラメータデータおよび/または作動限界値データを比較することができる。続いて、判定部47もまた、既知または今後分かる任意の温度パラメータデータが、その対応する作動限界値を超えるか否か、および/またはその対応する作動限界値を所定の温度値だけ超えるか否かを判定することができる。
【0036】
処置生成部43は、ユーザ50に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して、アラームまたはトリップなどの処置を生成する。一実施形態では、アラームまたはトリップは、パラメータの1つが、作動限界値をある時間、たとえば0.5秒間超過すると生成され得る。ターボ機械15の温度制御を維持することができるように、アラームまたはトリップを起こすいかなる時間経過でも選択することができることを、当業者は理解するであろう。さらに、処置生成部43は、その対応する作動限界値を超過する既知または今後分かる任意の温度パラメータデータの少なくとも1つに応答して、アラームまたはトリップを生成することができる。
【0037】
温度制御システム40は、生成されたユーザ50に対するアラームおよびトリップを、たとえばユーザインターフェースモジュール44を介して送出することができる。一実施形態では、ユーザインターフェースモジュール44は、ターボ機械15制御室内にグラフィカルユーザインターフェースを設けることができる。
温度制御方法論
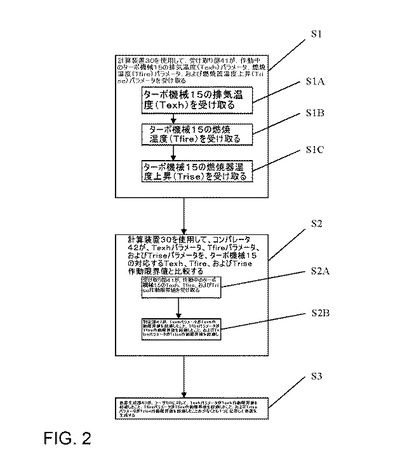
図2を参照すると、作動中のターボ機械15の温度を制御する方法の実施形態が示されている。ステップS1は、計算装置30を使用して、受け取り部41が、作動中のターボ機械15の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップを含む(図1参照)。
【0038】
図2のステップS1の一実施形態では、温度パラメータを受け取る受け取り部41は、ターボ機械15の排気温度(Texh)を受け取るステップS1Aと、ターボ機械15の燃焼温度(Tfire)を受け取るステップS1Bと、ターボ機械15の燃焼器温度上昇(Trise)を受け取るステップS1Cとを含む。一実施形態では、受け取り部41は、Texh、Tfire、およびTriseパラメータを計算用製品、または別のコンピュータシステム(図示せず)(そのコンピュータシステムはTexh、Tfire、およびTriseパラメータを独立に計算する)の外部計算装置(複数可)から本明細書に記載のようにI/O構成要素33を介して独立に受け取ることもできる。Texhパラメータは、たとえば、ターボ機械15の作動中、任意の所与の時点での複数のTexh測定値の平均を取ることによって計算することができることを当業者は理解するであろう。Texh測定値は、ターボ機械15が含むサーモカップル18によって取得することができる(図1参照)。
【0039】
一実施形態では、受け取り部41は、ターボ機械15の様々な作動状態に際して上記のパラメータの1つまたは複数の測定値を直接取得することによってTexh、Tfire、およびTriseパラメータを求めることができる計算用製品(複数可)、別のコンピュータシステム(複数可)の外部計算装置(複数可)などからTexh、Tfire、およびTriseパラメータを受け取ることができる。あるいは、Texh、Tfire、およびTriseパラメータは、様々な作動状態におけるターボ機械15の燃料流量、タービン速度、入口温度、パワー出力、圧縮機排出温度、圧縮機排出圧力などの様々な作動入力値および出力値を使用して上記の1つまたは複数の温度パラメータを求める外部コンピュータモデリングシステムによって推定することができる。
【0040】
Texh、Tfire、およびTriseパラメータならびにその他を求めるために使用することができる計算モデリングシステムおよび方法の例は、米国特許第7,742,904号に記載のモデルベース式制御システムでもよく、同特許は参照によりその全体が本明細書に援用される。明快さおよび便宜上の理由で、米国特許第7,742,904号からのある部分が、この出願の計算モデリングシステム節に説明されている。
【0041】
別の実施形態では、方法ステップS1は、受け取り部41が、作動中のターボ機械15の1つまたは複数の追加の温度パラメータを受け取るステップをさらに含むことができる。1つまたは複数の追加の温度パラメータは、積極的に制御することができる、作動中のターボ機械15の温度パラメータを直接または間接に表すことができる任意の温度パラメータでよい。
【0042】
一実施形態では、1つまたは複数の追加の温度パラメータは、ターボ機械15の様々な作動状態において上記のパラメータの1つまたは複数の測定値を直接取得することによって1つまたは複数の追加の温度パラメータを求めることができる計算用製品(複数可)、別のコンピュータシステム(複数可)の外部計算装置(複数可)などから受け取り部41によって受け取ることができる。あるいは、1つまたは複数の追加の温度パラメータは、様々な作動状態におけるターボ機械15の様々な作動入力値および出力値を使用して上記の1つまたは複数の温度パラメータを求める、外部コンピュータのモデリングシステム(この出願の計算モデリングシステム節に記載の米国特許第7,742,904号の一部分を参照)によって推定することができる。
【0043】
図2を参照すると、ステップS2は、計算装置30を使用して、コンパレータ42が、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較するステップを含む(図1参照)。図2の方法ステップS2の一実施形態では、コンパレータ42が温度パラメータを対応する作動限界値と比較するステップは、ステップS2Aを含み、このステップS2Aは、受け取り部41が、作動中のターボ機械15のTexh、Tfire、およびTrise作動限界値を受け取るステップを含む(図1参照)。
【0044】
受け取り部41は、本明細書に記載のようにI/O構成要素33を介して、それに限定されないが、作動限界値を入力する運転者またはプログラマなどのユーザ50から、別の計算用製品(複数可)から、または作動限界値を計算する別のコンピュータシステム(図示せず)の外部コンピュータ装置(複数可)から作動限界値を受け取ることができる(図1参照)。一実施形態では、Texh、Tfire、およびTrise作動限界値は個々に、複数の作動限界値を包含することができ、たとえば、Tfire作動限界値は、本明細書に記載のTfireアラーム限界値および/またはTfireトリップ限界値を包含することができる。
【0045】
方法ステップS2Aの別の実施形態では、受け取り部41は、ステップS1で受け取った1つまたは複数の温度パラメータにそれぞれ対応する、作動中のターボ機械15の1つまたは複数の追加の作動限界値をさらに受け取ることができる。1つまたは複数の追加の作動限界値は、本明細書で説明されるようにたとえば温度対パワーによって定義することができる、ターボ機械15の任意の作動領域に関するものであってよいことを当業者は理解するであろう。1つまたは複数の追加の作動限界値は、作動ベースロード曲線、アラーム限界値、トリップ限界値、絶対限界値などを含み得る(この出願の計算モデリングシステム節に記載の米国特許第7,742,904号の一部を参照のこと)。
【0046】
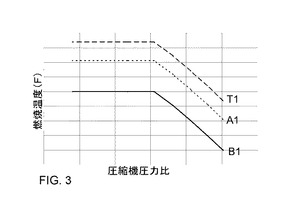
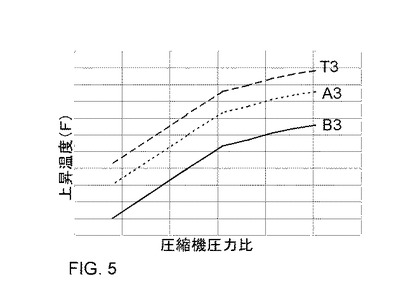
作動温度限界値の一実施形態において、図3〜5は、Texh、Tfire、およびTrise作動限界値を表す曲線を示す。各図において、y軸は、個々の作動領域に関し度C単位で増加する温度を表し、単位は下から上へ増加する。x軸は、増加する圧縮機圧力比を表し、左から右へ増加する。
【0047】
図3を参照すると、ターボ機械15のTfire作動領域を表すグラフが示されている。曲線B1は、Tfireの作動ベースロード曲線を表し得る。Tfireベースロード曲線は、ターボ機械15の正常作動状態が存在する領域を表すことができる。曲線A1は、Tfireアラーム限界値を表し得る。Tfireアラーム限界値は、ターボ機械15の作動状態が、正常状態を超え、注意を必要とし得るが、ターボ機械15のトリップ(停止)を行わなくてよい領域を表すことができる。曲線A1は、曲線A1が本明細書に記載のようなアラーム限界値を表すことができる、曲線B1より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。
【0048】
曲線T1は、Tfireトリップ限界値を表し得る。Tfireトリップ限界値は、ターボ機械15の作動状態が、正常状態を超え、ターボ機械15を損傷する可能性があり得、ターボ機械15のトリップを当然行い得る領域を表すことができる。曲線T1は、曲線T1が本明細書に記載のようなトリップ限界値を表すことができる、曲線B1より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。
【0049】
図4を参照すると、ターボ機械15のTexh作動領域を表すグラフが示されている。一実施形態では、Texh作動領域は、約260℃から約820℃の温度範囲にあり得る。曲線B2は、Texhの作動ベースロード曲線を表し得る。Texhベースロード曲線は、ターボ機械15の正常作動状態が存在する領域を表すことができる。曲線A2は、Texhアラーム限界値を表し得る。Texhアラーム限界値は、ターボ機械15の作動状態が、正常状態を超え得、注意を必要とし得るが、ターボ機械15のトリップを行わなくてよい領域を表すことができる。曲線A2は、曲線A2が本明細書に記載のようなアラーム限界値を表すことができる、曲線B2より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線A2は、曲線B2に沿った各点でそれより約3℃高くし得る。
【0050】
曲線T2は、Texhトリップ限界値を表し得る。Texhトリップ限界値は、ターボ機械15の作動状態が、正常状態を超え得、ターボ機械15を損傷する可能性があり得、ターボ機械15のトリップを当然行い得る領域を表すことができる。曲線T2は、曲線T2が本明細書に記載のようなトリップ限界値を表すことができる、曲線B2より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線T2は、曲線B2に沿った各点でそれより約6℃高くし得る。
【0051】
曲線F2は、Texh絶対限界値を表し得る。Texh絶対限界値は、ターボ機械15の作動状態が、危険であり得、トリップを開始しなければターボ機械15に最終的に損傷を生じさせ得る領域を表す。曲線F2は、曲線F2が本明細書に記載のような絶対限界値を表すことができる、曲線B2より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線F2は、各パワー装置に対して単一の温度、すなわち作動領域全体に亘る直線での限界値であり得る。
【0052】
図5を参照すると、ターボ機械15のTrise作動領域を表すグラフが示されている。曲線B3は、Triseの作動ベースロード曲線を表し得る。Triseベースロード曲線は、ターボ機械15の正常作動状態が存在する領域を表すことができる。曲線A3は、Triseアラーム限界値を表し得る。Triseアラーム限界値は、ターボ機械15の作動状態が、正常状態を超え、注意を必要とし得るが、ターボ機械15のトリップ(停止)を行わなくてよい領域を表すことができる。曲線A3は、曲線A3が本明細書に記載のようなアラーム限界値を表すことができる、曲線B3より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線A3は、曲線B3に沿った各点でそれより約3℃高くし得る。
【0053】
曲線T3は、Triseトリップ限界値を表し得る。Triseトリップ限界値は、ターボ機械15の作動状態が正常状態を超え、ターボ機械15を損傷する可能性があり得、ターボ機械15のトリップを当然行い得る領域を表すことができる。曲線T3は、曲線T3が本明細書に記載のようなトリップ限界値を表すことができる、曲線B3より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線T3は、曲線B3に沿った各点でそれより約6℃高くし得る。
【0054】
前述の実施形態では、作動限界値A1、T1、A2、T2、F2、A3、およびT3は、1つの入力変数、すなわち圧縮機圧力比の関数としてそれぞれ定義されていた。上述の作動限界値は、作動中のターボ機械15の作動領域を表す追加の入力変数または様々な入力変数によって定義することができることを当業者は理解するであろう(図1参照)。追加の入力変数は、直接測定し、計算し、または本明細書に記載のように推定することができる。
【0055】
図3〜5に示された作動領域に関する温度範囲、すなわち温度対圧縮機圧力比は、同じである必要はなく、図示の各作動領域に関して特有であり、類似し、または重なり合っていてもよいことを当業者は理解するであろう。本明細書に記載のターボ機械の温度を制御する方法のいくつかの実施形態を実施することにおいて実現し得る利点は、ターボ機械の複数の作動領域が定義されると、複数の作動領域が、ターボ機械15の対応する作動負荷での許容作動温度をより良く表すので、作動中のターボ機械15のより十分な温度制御を達成することができることであることが判明している。
【0056】
図2の方法ステップS2の実施形態では、計算装置30を使用して、コンパレータ42が、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較し、ステップS2はステップS2Bを含み、判定部47が、TexhパラメータがTexh作動限界値を超えるか否か、TfireパラメータがTfire作動限界値を超えるか否か、およびTriseパラメータがTrise作動限界値を超えるか否かの少なくとも1つを判定する(図1参照)。
【0057】
ステップS2Bの実施形態では、Texh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を超えているか否か判定するために、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、対応する作動限界値と比較することができる。たとえば、ステップS1からのTexh、Tfire、およびTriseパラメータを、図3〜5それぞれに示された対応するTexh、Tfire、およびTrise限界値に対してプロットすることができる。Texh、Tfire、およびTriseパラメータが対応するTexh、Tfire、およびTrise作動限界値より上に位置する場合には、Texh、Tfire、およびTriseパラメータはそれらの対応する作動限界値を超えていると考えられる。
【0058】
本明細書に記載のように、判定部47は、少なくとも1つのTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を超えているか否か判定することができる。別の実施形態では、判定部47はまた、少なくとも1つのTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を、それに限定されないが0.5秒などの時間、超えているか否か判定することができる。別の実施形態では、判定部47はまた、少なくとも1つのTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を、それに限定されないが3℃、6℃、および9℃などの所定の温度値だけ、超えているか否か判定することができる。
【0059】
本明細書に記載のターボ機械の温度を制御する方法のいくつかの実施形態を実施することにおいて実現し得る利点は、ターボ機械の複数の作動限界値が定義されると、その複数の作動温度限界値によって、実際の作動温度がターボ機械15の対応する作動負荷での正常作動温度を超えた可能性のあることを表す警告が増強されるので、作動中のターボ機械15のより十分な温度制御を達成することができることであることが判明している。
【0060】
本明細書に記載のターボ機械の温度を制御する方法のいくつかの実施形態を実施することにおいて実現し得る利点は、Texh、Tfire、およびTriseパラメータの少なくとも1つがそれらの対応する作動限界値をそれによって超え得る所定の温度値が定義されたとき、その所定の温度値によって、ユーザ50が、アラームおよび/またはトリップが生成される前にTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値をどの程度超え得るかに基づいて、正確な制御を行うことが可能になるので、作動中のターボ機械15のより十分な温度制御を達成することができることであることもまた判明している。
【0061】
一実施形態では、図2のステップS3は、処置生成部43が、ユーザ50に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップを含む(図1参照)。
【0062】
ステップS3の実施形態では、処置は、たとえば、少なくとも1つのTexh、Tfire、およびTriseパラメータが、ターボ機械15の作動中のいかなる時点でも、対応するTexh、Tfire、およびTrise作動限界値を超えたことに応答するアラームまたはトリップを含む。アラームは、コンピュータまたは携帯端末へのテキストメッセージなどの電子通知、制御パネル上の点滅ボタンおよび/または制御室内の点滅ライトなどの視覚表示、クラクションまたはサイレンなどの聴覚表示を含み得る。アラームは、ユーザインターフェースモジュール44、および/またはI/O構成要素33を介してユーザ50に通知することができる。トリップは、ターボ機械15の停止であり得る。
【0063】
ステップS3の別の実施形態では、トリップは、ターボ機械15の自動停止、またはアラームまたはトリップの表示後にユーザ50によって行われる手動停止を含み得る(図1参照)。
【0064】
ステップS3の別の実施形態では、処置の一例は、その対応する作動限界値を超え得た温度パラメータが作動限界値より下のレベルに戻るまで、ターボ機械15から負荷を取り除く、たとえばタービンのパワー出力を減らすことをさらに含み得る。
【0065】
あるいは、処置生成部43は、ターボ機械15の作動中、判定部47が判定するTexh、Tfire、およびTriseパラメータの少なくとも1つが、対応するTexh、Tfire、およびTrise作動限界値をある時間超過したことに応答するトリップを含み得る処置を生成し得る。その時間は、ターボ機械15の作動中の温度のスパイクまたは温度パラメータの外れ値によって生じる可能性のある不必要なトリップを排除するために用いることができる(図1参照)。一実施形態では、Tfireパラメータは、Tfireトリップ限界値を約0.5秒間超過した後に、処置生成部43が処置を起こし得る。別の実施形態では、Texhパラメータは、Texhトリップ限界値を約0.5秒間超過した後に、処置生成部43が処置を起こし得る。さらに別の実施形態では、Triseトリップ限界値を約0.5秒間超過した後に、Triseパラメータは、処置生成部43が処置を起こし得る。
【0066】
ステップS3の別の実施形態では、処置生成部43は、たとえば、Texh、Tfire、およびTriseパラメータの少なくとも1つが、ターボ機械15の作動中、判定部47によって判定される、ある時間それらの対応する作動限界値を、それに限定されないが3℃、6℃、または9℃の増分などの所定の温度値だけ超えたことに対応するアラームまたはトリップを含み得る処置を生成し得る。別の実施形態では、処置生成部43は、様々な所定の温度値に基づいて複数の処置を生成し得る。たとえば、TexhがそのTexh作動限界値を3℃だけ超えた場合、アラームが生成され得る。TexhがそのTexh作動限界値を6℃だけ超えた場合、トリップが生成され得る。
計算モデリングシステム
作動しているガスタービンの一部の作動パラメータを推定するために適応型ガスタービンモデルを用いることができるガスタービン制御システムを提示する。モデル化することができる作動パラメータには、たとえば、排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータ、ならびに/または対応するTexh、Tfire、およびTrise作動限界値、さらに加えて、追加のパラメータが含まれる。モデルは、制御アルゴリズムに使用するためにセンサによる検知、たとえば測定を直接行えない作動パラメータを推定することができる。モデルはまた、測定される作動パラメータを推定することもでき、それによって、推定された状態と測定された状態とを比較することができる。その比較は、ガスタービンが作動し続けている間に、モデルを自動的に調整するのに使用することができる。
【0067】
ガスタービンモデルは、たとえば周囲圧力、圧縮機入口案内静翼位置、燃料流量、入口ブリード熱流量、発電機パワー損失、入口および排気ダクト圧力損失、圧縮機入口温度など、測定された状態を入力パラメータとして受け取ることができる。モデルは、たとえば排出ガス温度、燃焼温度、燃焼器上昇温度、圧縮機排出圧力および温度、ならびにパワー出力など、推定作動パラメータを生成することができる。推定作動パラメータは、測定作動パラメータと共にガスタービンを制御するために使用することができる。たとえば、測定作動パラメータおよび推定作動パラメータは、ガスタービン作動状態、たとえば所望のタービン排出温度、燃焼器全体燃料流量、燃料分割スケジュール、および入口ブリード熱流量を設定するために制御スケジュールに入力することができる。さらに、測定作動パラメータおよび推定作動パラメータは、モデルの精度を評価し、モデルを調整するために使用することができる。
【0068】
ガスタービンモデルは、恒常的、自動的、およびリアルタイムに、カルマンフィルタを使用して調整することができる。カルマンフィルタは、様々なセンサからの測定ガスタービンパラメータとモデルから出力される推定パラメータとの差を示す入力信号を受け取ることができる。カルマンフィルタはまた、入力としてカルマンフィルタゲインマトリックス(KFGM)を受け取ることができ、カルマンフィルタゲインマトリックスは、モデルパフォーマンス乗数の修正に対するモデル推定パラメータの不確実性重み付け感度を表す数字の配列である。カルマンフィルタは、モデルを調整し、推定ガスタービンパラメータの精度を向上させるために用いることができるパフォーマンス乗数を生成するために、供給される入力を使用することができる。
【0069】
カルマンフィルタゲインマトリックス(KFGM)は、一連の数学方程式によって計算することができる。これらの方程式は、入力としてモデル感度マトリックス(MSM)およびモデルおよび測定の不確実性の推定値を受け取ることができる。MSMは、制御部常駐ガスタービンモデルの摂動および評価によってリアルタイムにオンラインで計算することができる。カルマンフィルタは、推定作動パラメータと測定作動パラメータとの差を最小化するように乗数値を最適化することができる。
【0070】
ガスタービンモデルは、実際のガスタービンの変化する効率、流れ容量、および他のパラメータに適合することができる。カルマンフィルタによって生成される出力パフォーマンス乗数は、測定されたガスタービンのパラメータにより良く対合するようにモデルを適合させることができる。カルマンフィルタはまた、たとえば、長期に亘る作動において生じるガスタービンの構成要素効率の劣化および空気流れ容量の変化を取り入れてモデルを調整することもできる。
【0071】
MSMおよびKFGMは、オンラインでリアルタイムに計算することができるので、カルマンフィルタ構造は、利用可能なセンサの数の変化、およびモデルの推定出力パラメータと比較するのに利用可能な測定出力パラメータのタイプの変化に適合することができる。センサの不具合などにより、ガスタービンのある作動パラメータがもはや測定されないとき、カルマンフィルタ構造は、測定パラメータの欠落を考慮に入れて変更され得、残りのガスタービンの測定状態に基づいてパフォーマンス乗数の生成を続け得る。
【0072】
図6を参照すると、ガスタービン110の実施形態が示されている。ガスタービン110は、圧縮機112、燃焼器114、圧縮機112に駆動的に結合されたタービン116、およびコンピュータ制御システム118(制御部)を備え得る。圧縮機112への入口ダクト120は、周囲の空気および場合によっては噴射水を圧縮機112へ供給することができる。入口ダクトは、入口ダクト120を通って圧縮機112の入口案内静翼(I.G.V.)121に流れ込む周囲空気の圧力損失の因になり得るダクト、フィルタ、スクリーン、および騒音吸収装置を有し得る。タービン116の排気ダクト122は、燃焼ガスをタービン116の出口から、たとえば排出物制御および騒音吸収装置を通って導く。排気ダクト122は、タービン116に背圧を加え得る騒音吸収材および排出物制御装置を備え得る。入口圧力損失および背圧の大きさは、ダクト120、122への構成要素の追加、ならびに入口および排気ダクトを塞ぐ埃や泥により、時間が経つと変化し得る。タービン116は、電力を発生する発電機124を駆動することができる。圧縮機112への入口損失およびタービン116排気圧力損失は、ガスタービン110を通る修正流量の関数になる傾向がある。
【0073】
ガスタービン110の作動は、タービン、発電機、および周囲環境の様々な観察可能な状態を検出する複数のセンサシステム126によって監視することができる。多くの場合、2つまたは3つの冗長センサで同じ被測定状態を測定することができる。たとえば、3つの冗長温度センサシステム126のグループが、ガスタービン110を取り巻く周囲温度、圧縮機排出温度、タービン排気ガス温度、およびガスタービン110を通るガス流れの他の温度測定値を監視することができる。同様に、3つの冗長圧力センサシステム126のグループが、周囲圧力、ならびに圧縮機入口および出口、タービン排気、ガスタービン110を通るガス流れの他の位置での静圧および動圧レベルを監視することができる。3つの冗長湿度センサシステム126、たとえば乾湿球温度計のグループが、圧縮機112の入口ダクト内の環境湿度を測定することができる。3つの冗長センサシステム126のグループはまた、ガスタービン110の作動に関する様々なパラメータを検知することができる流量センサ、速度センサ、火炎検出センサ、バルブ位置センサ、案内静翼角度センサなどを備え得る。
【0074】
本明細書で使用される限り、「パラメータ」は、タービン内の定められた位置での温度、圧力、ガス流量など、タービンの作動状態を定義するために使用することができる項目を意味する。一部のパラメータは測定することができ、すなわち検知し直接知ることができる。他のパラメータは、モデルによって推定することができ、間接的に知ることができる。測定および推定されたパラメータは、所与のタービン作動状態を表すために使用することができ、たとえば図3〜5を参照されたい。
【0075】
燃料制御システム128は、燃料供給源から燃焼器114へ流れる燃料、1次燃料ノズルと2次燃料ノズルへ流入する燃料間の分割、および燃焼チャンバに流入する2次空気と混合する燃料の量を調節することができる。燃料制御部はまた、燃焼器114に対する燃料のタイプを選択することもできる。燃料制御システム128は、独立した装置でもよく、あるいは主制御部118の構成要素でもよい。
【0076】
主制御部118は、N.Y.州スケネクタディのGE Industrial & Power Systemsによって刊行されたRowen,W.I.の「SPEEDTRONICTM Mark V Gas Turbine Control System」、GE−3658D、に記載されているような、General Electric SPEEDTRONIC(登録商標)ガスタービン制御システムでもよい。制御部118は、センサの入力および人間の運転者からの指令を用いてガスタービン110の作動を制御するプログラムを実行するプロセッサ(複数可)を有するコンピュータシステムでもよい。主制御部118によって実行されるプログラムは、燃焼器114への燃料流量を調節するスケジューリングアルゴリズムを含み得る。主制御部118によって生成される命令は、ガスタービン110のアクチュエータに、たとえば、燃焼器へ流れる燃料の流量、燃料分割、およびタイプを調節する、燃料供給源と燃焼器との間のバルブ(アクチュエータは図示せず)を調節させ、圧縮機の入口案内静翼121(アクチュエータ127)を調節させ、ガスタービンの他の制御設定を行わせる。
【0077】
スケジューリングアルゴリズムは、主制御部118が、たとえば、タービン排気中のNOXおよびCOの排出をある所定の排出物制限値内に保ち、燃焼器燃焼温度を所定の温度制限値内に保つことを可能にすることができる。スケジューリングアルゴリズムは、その時点の圧縮機圧力比、周囲の比湿、入口圧力損失、およびタービン排気背圧などのパラメータ変数に関する入力を有し得る。制御システム118は、ガスタービン110の作動可能限界値を守りながら性能目標を満足するように、たとえば所望のタービン排気温度および燃焼器燃料分割の設定など、ガスタービン110をスケジュールするためにアルゴリズムを適用することができる。
【0078】
図7を参照すると、ガスタービンおよび適応型リアルタイムエンジンシミュレーションモデル130(ARES)の実施形態の高位のブロックダイアグラムが示されている。ARESモデル130は、ガスタービン110の複数の作動パラメータをリアルタイムに電子的にモデル化することができる。ガスタービン110は、「基本的入力」(
【0079】
【数1】

)132と呼称される複数の観察可能なパラメータを有し得る。基本的入力(
【0080】
【数2】
)132は、センサによって直接計測することができ、周囲状態(A)、入口案内静翼(IGV)の角度、燃焼器114へ流れる燃料の量(FUEL)、およびガスタービン110の回転速度(SPEED)を含み得る(それらに限定されない)。列挙された基本的入力(
【0081】
【数3】
)132は、例示的実施形態としてよく、検知入力を収集することができることを単に例示するために示されている。特定の検知入力がこの開示に必須なのではなく、それは特定のガスタービン設備での制御システムおよび利用可能なセンサに依存する。
【0082】
用語「基本的」は、これら測定パラメータ132のそれぞれが、本明細書に開示されたモデル130の個々の実施形態に入力されなければならず、または、あらゆるそのようなガスタービンモデルがこれらの入力を有さなければならないことを意味するものではない。ガスタービンのリアルタイムモデル130への基本的入力(
【0083】
【数4】
)132は、一部、全て、および/または他の入力を含み得る。基本的入力という用語は、本明細書に開示された特定のモデルの実施形態に関して、これら入力が、実際の状態の測定値から取得され、モデルへの入力として用いられることを単に示す。
【0084】
基本的入力(
【0085】
【数5】
)132は、ガスタービン110のモデル130に入力することができる。これら入力は、モデル130によって、ガスタービン110の作動パラメータに対応する、モデル130の出力値(
【0086】
【数6】
)を生成するために用いられる。その出力は、1次モデル化出力(
【0087】
【数7】
)138を含み得、また、ガスタービン110の対応する測定作動パラメータ144と比較することができる。モデル化出力はまた、直接測定することができない、たとえば所望の燃料流量などのガスタービンパラメータを予測することができる拡張モデル化出力(
【0088】
【数8】
ext.)140も含み得る。拡張モデル化出力140は、所望の燃料流量を適用して燃焼器114への実際の燃料流量を制御することなどによって、ガスタービン110を作動させるために制御システムによって使用され得る。
【0089】
1次出力138およびそれらの対応する測定作動パラメータ(調整入力)144は、自動的、恒常的にモデル130を調整することができる誤差修正システム147に適用することができ、それにより、全てのモデル化出力(
【0090】
【数9】
および
【0091】
【数10】
ext.)がガスタービン110の作動状態を正確に予測することを保証する。モデル化出力138、140は、ガスタービン110の制御、メインテナンスの計画、およびガスタービン110の性能の予測を行うために使用することができる。モデル化出力の、ガスタービン110の制御、およびモデル130の調整以外の役割への応用法は、ガスタービン制御に関する当業者には周知である。
【0092】
モデル130の1次出力(
【0093】
【数11】
)138は、たとえば、発電機124などへのモデル化(M)パワー出力(POW_M)、モデル化タービン排気温度(EXHTEMP_MOD)、およびモデル化圧縮機状態(C_M)であり得る。1次出力(
【0094】
【数12】
)138に該当する数および個々のパラメータは、ガスタービンのモデルごとに変化し得る。さらに、1次出力(
【0095】
【数13】
)138は、ガスタービン110の作動中に変わることもあり、たとえば、センサが故障すれば、対応する測定パラメータが、1次出力の1つとの比較値としてそれ以上利用できなくなる。
【0096】
1次出力138は、測定され、たとえば検知された作動パラメータ(
【0097】
【数14】
)144、すなわち実際のパワー出力(POW_A)、タービン排気温度(EXHTEMP_A)、および圧縮機状態(C_A)などとそれぞれ対応し得る。測定パラメータ144は、ガスタービン110の対応する実際のパラメータを監視するセンサの出力信号に基づき得る。やはり複数の冗長センサが、測定パラメータ144のそれぞれを実測することができる。検知パラメータは、ガスタービンに対する特定の制御システムおよび利用可能なセンサに基づいて選択することができる。
【0098】
モデル130は、ガスタービン110のコンピュータ生成モデルであり得る。モデル130は、1次および拡張出力の数学的表現の配列であり得る。これらの表示のそれぞれは、モデル化出力パラメータ138、140の推定値を生成するために、入力値、たとえば基本的入力132に依拠し得る。数学的表現は、測定パラメータ値が取得できない状況で使用することができる代用出力パラメータ値138、140を生成することができる。ガスタービンのリアルタイムコンピュータモデルは、特に航空機用ガスタービンエンジンの制御に用いられる場合に周知である。産業用ガスタービンもまた、コンピュータモデルの対象になっている。たとえば、モデルは、1次出力のような検知される作動パラメータ、ならびに燃焼およびタービン入口温度、空気流量、および圧縮機ストールマージンのような検知されないパラメータの推定に使用することができる。モデル130は、物理学に基づく空気熱力学コンピュータモデル、回帰適合モデル、ニューラルネットモデル、または他の適切なガスタービンのコンピュータモデルであり得る。
【0099】
1次出力138は、測定パラメータ値144と比較することができる。測定値144は、モデル130を調整するために使用することができるので、調整入力と呼ぶことができる。1次出力138および測定パラメータ値144は、正規化モデル化出力(
【0100】
【数15】
)および正規化測定出力(
【0101】
【数16】
)を生成するために正規化146することができる。これら正規化出力は比較148することができ、たとえば、(Δ(POW_MOD,POW_A))のような差分信号(Δ(
【0102】
【数17】
,
【0103】
【数18】
))150を生成するために、POW_MODをPOW_Aと比較することができる。差分信号150は、測定された実際のパラメータに対するモデル化出力パラメータの誤差を示すことができる。一般に、1次出力138のそれぞれに対応する少なくとも1つの差分信号150が存在し得、個々のパラメータを測定する冗長センサのそれぞれに対応する差分信号が存在し得る。一般に、差分信号を生成するために、少なくとも1つの測定値144、たとえば調整入力が、各1次出力138に対して必要とされ得る。たとえばセンサの不具合のために、1つまたは複数の調整入力が取得できない場合、対応する差分信号(Δ(
【0104】
【数19】
,
【0105】
【数20】
))150は生成され得ないが、誤差修正システムはそれでも作動してモデル130を修正する。
【0106】
カルマンフィルタゲインマトリックス(KFGM−K)152が、差分信号150を入力として受け取ることができ、ガスタービンモデル130を調整するために使用される正規化修正係数調節値(
【0107】
【数21】
)160を生成することができる。図7に示すように、KFGMは、調整係数151を適用して差分信号150を調節することができ、正規化修正係数(
【0108】
【数22】
)160を生成することができる。比較的多数の差分信号150、たとえばPOW、EXHTEMP、およびCのそれぞれに関する冗長センサの出力によって、カルマンフィルタゲインマトリックスが、モデルを正確に調整するために使用することができ、モデルが正確な出力値(
【0109】
【数23】
および
【0110】
【数24】
ext)を生成することを保証することができる正規化修正係数160を生成することを可能にすることができる。
【0111】
差分信号150の欠落が、モデルを調整するカルマンフィルタゲインマトリックスの能力を減少させ得る(ただし消滅させはしない)。カルマンフィルタゲインマトリックス152の適応能力が、差分信号150の減少したセットを用いてカルマンフィルタゲインマトリックスがモデル130を調整し続けることを可能にすることができる。1つまたは複数の差分信号が取得できなくなったときモデルを自動的に調整するために、カルマンフィルタゲインマトリックス(K)152は、差分信号の欠落に対処するように修正することができる。したがって、ガスタービンは、センサが故障し、観察可能な作動状態に関する調整入力データが取得できないときでも、作動し続け、自動的に調整され得る。
【0112】
図8を参照すると、カルマンフィルタゲインマトリックス(KFGM)を生成することができる機構の実施形態が提示されている。波形線200は、図7を表しており、図7のK152を介して図8の線151に接続されている。図7および8を参照すると、モデル感度マトリックス(MSM)166は、一連の入力(基本的入力132、および一連の摂動パフォーマンス乗数、たとえば摂動修正および正規化差分信号164)をガスタービンモデル167(モデル130など)に適用することによって求めることができる。モデル167の1次出力の感度は、偏導関数解析168によって求めることができる。感度値を正規化169して、感度マトリックス(a,h)166を形成することができる。感度マトリックスを、オンラインフィルタゲイン計算165(たとえばカルマンフィルタ方程式)に適用して、最適調整値、たとえばゲイン値のマトリックス152を求めることができ、マトリックス152は、測定ガスタービン値とモデルによって予測された対応する値との差分信号(Δ(
【0113】
【数25】
,
【0114】
【数26】
))150に該当する差分信号に適用される。
【0115】
カルマンフィルタ方程式165は、1960年代にR.F.KalmanおよびBucyによって最初に公表され、図8に示されている。カルマンフィルタは当技術分野では知られており、制御システムの当業者はこれらのフィルタを熟知しているであろう。カルマンフィルタは、最適帰納的データ処理アルゴリズムである。
【0116】
カルマンフィルタゲインマトリックス(K)152は、差分信号(Δ(
【0117】
【数27】
,
【0118】
【数28】
))150に適用して正規化修正係数調節値160を生成することができる1つまたは複数の調整係数151を含み得る。正規化修正係数160は、現在の修正係数と事前の修正係数との差を平均化するために、事前の正規化修正係数(Z-1)158と加算156することができる。平均修正係数は、非正規化162され、それにより、たとえば構成要素効率および流れ容量を含み得るパフォーマンス乗数164(また、非正規化された修正係数)を生成することができる。非正規化修正係数164は、ガスタービンモデル130にたとえば乗数として適用することができ、その乗数は、ガスタービンをモデル化し、モデル化出力パラメータ値138、140を生成するアルゴリズムに適用される。乗数は、アルゴリズムを調節することによってモデルを調整し、それによって、ガスタービンの実際の作動を正確に表すモデル化パラメータ値を生成することができる。モデル化出力パラメータ値138、140は、ガスタービンへの燃料および空気流量を決定し、また、ガスタービンへの他の制御入力を決定するために用いることができる。
【0119】
用語「第1」「第2」などは、本明細書ではいかなる順序、量、または重要性をも意味するものではなく、ある要素を別の要素から区別するために使用され、また、用語「a」および「an」は、本明細書では量を限定することを意味するのではなく、言及されたアイテムが少なくとも1つ存在することを意味する。量と共に使用される修飾語「約」は、言及された数値を含み、文脈によって示される意味を有する(たとえば、特定の量の測定に伴う誤差の程度を含む)。本明細書で使用される接尾辞「(s)」は、それが修飾する語の単数および複数の両方を含むことを意味し、それによって、その語の1つまたは複数を含める(たとえば「metal(s)」は1つまたは複数の「metal」を含む)。本明細書で開示される範囲は、包括的であり、独立に組み合わせられる(たとえば、「約25重量%まで、または、より具体的には、約5重量%から約20重量%まで」という範囲は、両終端点および「約5重量%から約25重量%まで」の範囲の全ての中間値を含む、など)。
【0120】
本明細書では、ターボ機械の温度を制御する方法およびシステムとして示され説明されたが、本発明の態様は、様々な代替実施形態をさらに提供することを理解されたい。たとえば、一実施形態では、本発明は、少なくとも1つのコンピュータ可読媒体に格納されたコンピュータプログラムを提供し、そのプログラムは、実行されると、コンピュータシステムがターボ機械の温度を制御することを可能にする。この場合、コンピュータ可読媒体は、本明細書に記載のプロセスの一部または全てを実行する、温度制御システムプログラム40(図1)のようなプログラムコードを備える。用語「コンピュータ可読媒体」は、既知または今後開発される1つまたは複数の任意のタイプの実体的な表現用媒体を含み、その媒体から、プログラムコードのコピーが、計算装置によって読み取られ、再生され、または他の方法で伝送され得ることを理解されたい。たとえば、コンピュータ可読媒体は、1つまたは複数の携帯式記憶用製品、計算装置の1つまたは複数のメモリ/格納構成要素、紙などを含み得る。
【0121】
別の実施形態では、本発明は、本明細書に記載のプロセスの一部または全てを実行する、温度制御プログラム40(図1)のようなプログラムコードのコピーを生成する方法を提供する。この場合、コンピュータシステムは、本明細書に記載のプロセスの一部または全てを実行するプログラムコードのコピーを処理して、プログラムコードのコピーを一連のデータ信号内にエンコードするように、1つまたは複数のその特性が設定および/または変形された一連のデータ信号を生成し、第2の別の場所で受け取るように伝送することができる。同様に、本発明の実施形態は、本明細書に記載のプロセスの一部または全てを実行するプログラムコードのコピーを取得する方法を提供し、その方法は、本明細書に記載の一連のデータ信号を受け取り、その一連のデータ信号を、少なくとも1つのコンピュータ可読媒体に格納されるコンピュータプログラムのコピーに翻訳するコンピュータシステムを備える。いずれの場合も、一連のデータ信号は、任意のタイプの通信リンクを用いて送信/受信することができる。
【0122】
さらに別の実施形態では、本発明は、ターボ機械の温度を制御するシステムを生成する方法を提供する。この場合、コンピュータインフラストラクチャ20(図1)のようなコンピュータシステムを得る(たとえば、生成する、維持する、利用可能にする、など)ことができ、本明細書に記載のプロセスを実行する1つまたは複数の構成要素を得て(たとえば、生成する、取得する、使用する、修正する、など)、コンピュータシステムに配置することができる。この場合、配置は、(1)計算装置にプログラムコードをインストールすること、(2)コンピュータインフラストラクチャに1つまたは複数の計算装置および/またはI/O装置を付加すること、(3)コンピュータインフラストラクチャが本明細書に記載のプロセスを実行することができるようにコンピュータインフラストラクチャを組み込み、かつ/または修正すること、などの1つまたは複数を含み得る。
【0123】
本発明の態様は、予約購読、広告、および/または料金ベースにおいて本明細書に記載のプロセスを実行するビジネスメソドの一部分として実行することができることを理解されたい。すなわち、サービスプロバイダは、本明細書に記載されているような、ターボ機械の温度を制御することを提供することができる。この場合、サービスプロバイダは、1または複数の顧客に対して本明細書に記載のプロセスを実行する、コンピュータ構造20(図1)のようなコンピュータインフラストラクチャを運営(たとえば、生成、維持、支援など)することができる。報酬として、サービスプロバイダは、購読および/または料金契約の下に顧客(複数可)から支払いを受け、1または複数の第三者などへの広告の販売から支払いを受けることができる。
【0124】
本発明の様々な態様の前述の記載は、例示および説明のために提示されてきた。包括的であること、または本発明を開示された形態通りに限定することを意図するものではなく、明らかに、多くの修正および変更が可能である。当業者に明らかであり得るそのような修正および変更は、添付特許請求の範囲によって定義される本発明の範囲内に包含される。
【符号の説明】
【0125】
15 ターボ機械
17 タービンシステム
18 サーモカップル
19 ターボ発電機
20 コンピュータインフラストラクチャ
30 計算装置
31 処理構成要素
32 メモリ構成要素
33 I/O構成要素
34 通信経路
35 I/O装置
36 記憶システム
40 温度制御システム
41 受け取り部
42 コンパレータ
43 処置生成部
44 ユーザインターフェースモジュール
46 データ
47 判定部
50 ユーザ
110 ガスタービン
112 圧縮機
114 燃焼器
116 タービン
118 制御部
120 ダクト
121 入口案内静翼
122 ダクト
124 発電機
126 センサシステム
127 アクチュエータ
128 燃料制御システム
130 適応型リアルタイムエンジンシミュレーションモデル
132 基本的入力
138 1次モデル化出力
140 拡張モデル化出力
144 調整入力
146 正規化
147 誤差修正システム
148 比較
150 差分信号
151 調整係数
152 カルマンフィルタゲインマトリックス
156 加算
158 正規化修正係数
160 正規化修正係数調節値
162 非正規化
164 パフォーマンス乗数
165 オンラインフィルタゲイン計算
166 感度マトリックス
167 ガスタービンモデル
168 偏導関数解析
169 正規化
200 波形線
T1 Tfireトリップ限界値曲線
A1 Tfireアラーム限界値曲線
B1 Tfire作動ベースロード曲線
T2 Texhトリップ限界値曲線
A2 Texhアラーム限界値曲線
B2 Texh作動ベースロード曲線
F2 Texh絶対限界値曲線
T3 Triseトリップ限界値曲線
A3 Triseアラーム限界値曲線
B3 Trise作動ベースロード曲線
ステップS1 計算装置30を使用して、受け取り部41が、作動中のターボ機械15の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取る
ステップS1A ターボ機械15の排気温度(Texh)を受け取る
ステップS1B ターボ機械15の燃焼温度(Tfire)を受け取る
ステップS1C ターボ機械15の燃焼器温度上昇(Trise)を受け取る
ステップS2 計算装置30を使用して、コンパレータ42が、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較する
ステップS2A 受け取り部41が、作動中のターボ機械15のTexh、Tfire、およびTrise作動限界値を受け取る
ステップS2B 判定部47が、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つがあるか否かを判定する
ステップS3 処置生成部43が、ユーザ50に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成する
【技術分野】
【0001】
本発明は、一般に、ターボ機械の作動パラメータの監視に関する。より詳細には、本発明は、ターボ機械の作動中に温度制御を行うシステムおよび方法に関する。
【背景技術】
【0002】
ターボ機械システムは、複雑であり、通常、作動負荷の広い変化に亘って、多数のパラメータを自動的に制御する必要がある。たとえば、タービンシステムおよびターボ発電機を備える発電システムについて、タービン自体の様々な構造の温度を制御しなければならない。通常、ターボ機械システムおよびその部品は、ターボ機械の作動中に存在する過酷な環境による熱応力を受ける。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第7742904号公報
【発明の概要】
【課題を解決するための手段】
【0004】
本開示の第1の態様は、ターボ機械の温度を制御する方法であって、計算装置を使用して、作動中のターボ機械の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップと、計算装置を使用して、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械の対応するTexh、Tfire、およびTrise作動限界値と比較するステップと、ユーザに対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップとを含む方法を提供する。
【0005】
本開示の第2の態様は、ターボ機械用の温度制御システムであって、作動中のターボ機械の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取る受け取り部と、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械の対応するTexh、Tfire、およびTrise作動限界値と比較するコンパレータと、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成する処置生成部とを備える少なくとも1つの装置を具備する温度制御システムを提供する。
【0006】
本開示の第3の態様は、実行されると、コンピュータシステムがターボ機械の温度制御方法を実施できるようにする、少なくとも1つのコンピュータ可読媒体内で具体化されたプログラムコードを備えるコンピュータプログラムであって、その方法が、計算装置を使用して、作動中のターボ機械の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップと、計算装置を使用して、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械の対応するTexh、Tfire、およびTrise作動限界値と比較するステップと、ユーザに対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップとを含むコンピュータプログラムを提供する。
【0007】
本発明の他の態様は、本明細書に記載の機能の一部または全てを含み、かつ/または実行する方法、システム、プログラム製品、およびそれぞれを使用し生成する方法を提供する。本発明の例示的態様は、本明細書に記載の1つまたは複数の問題、および/または記載されていない1つまたは複数の他の問題を解決するように考えられている。
【0008】
本発明のこれらおよび他の特徴は、本発明の様々な実施形態を示す添付図面と併せて、本発明の様々な態様の以下の詳細な記述からより容易に理解されよう。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態による、ターボ機械の温度制御システムを実装するための例示的環境のブロックダイアグラムである。
【図2】本発明の実施形態による、ターボ機械の温度を制御する方法のフローダイアグラムである。
【図3】本発明の実施形態による、ターボ機械の温度を制御する方法に関するターボ機械作動領域のグラフである。
【図4】本発明の実施形態による、ターボ機械の温度を制御する方法に関するターボ機械作動領域の別のグラフである。
【図5】本発明の実施形態による、ターボ機械の温度を制御する方法に関するターボ機械作動領域の別のグラフである。
【図6】本発明の実施形態による制御システムを有するタービンの概略図である。
【図7】本発明の実施形態による、タービン、モデルおよびカルマンフィルタモデル修正推定機構の高位のブロックダイアグラムである。
【図8】本発明の実施形態によるカルマンフィルタモデル修正推定機構のより詳細なフローチャートのブロックダイアグラムである。
【発明を実施するための形態】
【0010】
図面は一定の縮尺とは限らないことに留意されたい。図面は、本発明の典型的な態様のみを描くように意図されており、したがって、本発明の範囲を限定するものと考えるべきではない。諸図面では、図面間で同様な番号は同様な要素を表す。
【0011】
ターボ機械システムは、複雑であり、通常、作動負荷の広い変化に亘って、多数のパラメータを自動的に制御する必要がある。たとえば、タービンの様々な構造の温度を制御する必要がある。従来、ターボ機械のパラメータが測定され、ターボ機械制御システムにフィードバックされ、ターボ機械制御システムが、測定されたパラメータに基づいてあらゆる必要な自動制御を行っている。その測定およびフィードバック体系は、多数のパラメータに適している。しかし、ターボ機械の複雑さのために、また、様々なパラメータが他のパラメータに直接または間接にいかに影響を及ぼすかによって、より様々なパラメータをより強固な態様で用いる制御システムの開発には多数の難題を伴う。
【0012】
本発明の実施形態が、方法、装置(システム)およびコンピュータプログラム製品のフローダイアグラム図および/またはブロックダイアグラムを参照しながら、本明細書に記載される。フローダイアグラム図および/またはブロックダイアグラムの各ブロック、ならびにフローダイアグラム図および/またはブロックダイアグラムのブロックの組合せは、コンピュータプログラム命令によって実行することができることが理解されるであろう。これらコンピュータプログラム命令は、汎用コンピュータ、特定用途コンピュータ、または他のプログラム可能なデータ処理装置の処理構成要素に発せられて一機構を創出し、それによって、コンピュータまたは他のプログラム可能なデータ処理装置の処理構成要素を介して実行される命令が、フローダイアグラムおよび/またはブロックダイアグラムの1つまたは複数のブロックに規定されている機能/働きを実行する手段を生成する。
【0013】
これらコンピュータプログラム命令はまた、コンピュータまたは他のプログラム可能なデータ処理装置を特定の態様で機能させることができるコンピュータ可読媒体に格納することもでき、それによって、コンピュータ可読媒体に格納された命令が、フローダイアグラムおよび/またはブロックダイアグラムの1つまたは複数のブロックの機能/働きを実行する命令手段を含む製品を作り出す。
【0014】
コンピュータプログラム命令はまた、それをコンピュータまたは他のプログラム可能なデータ処理装置にロードし、一連の作動ステップをコンピュータまたは他のプログラム可能な装置上で実行させるようにして、コンピュータ実行プロセスを生成することができ、それによって、コンピュータまたは他のプログラム可能な装置上で実行される命令が、フローダイアグラムおよび/またはブロックダイアグラムの1つまたは複数のブロックに規定されている機能/働きを実行するプロセスを形成する。
例示的環境
図1を参照すると、作動中のターボ機械15の温度の制御に関する例示的環境が、本発明の実施形態に従って示されている。この場合は、環境は、様々な制御システムに関し本明細書に記載されている様々な処理ステップを実行することができるコンピュータインフラストラクチャ20を備える。たとえば、コンピュータインフラストラクチャ20は、他の構成要素の中でも、温度制御システム40を備える計算装置30を備えるところが示されており、温度制御システム40は、計算装置30が、本明細書に記載される処理ステップを実行することによって、作動中にターボ機械15の温度制御を実施することを可能にする。
【0015】
計算装置30はターボ機械15と通信することが示されている。一実施形態では、ターボ機械15は、ターボ発電機19に結合されたタービンシステム17を備える。当業者は、タービンシステム17およびターボ発電機19が、タービンシステム17およびターボ発電機19の作動に必要な既知または今後開発されるあらゆる構造を備えることができることを理解するであろう。たとえば、タービンシステム17は、任意の数の低、中間、または高圧部を有するガスタービンおよび/または蒸気タービンなどを備え得る。
【0016】
タービンシステム17は、N.Y.州スケネクタディのGeneral Electric Companyから市販されている、9FBエンジンと呼称されることもあるMS9001FBエンジンのような燃焼タービンエンジンを備え得る。本発明は、いずれか1つの特定エンジンには限定されず、たとえば、General Electric CompanyのMS7001FA(7FA)およびMS9001FA(9FA)、GE 90ならびにLMS100エンジンモデルを含む他のエンジンに関して使用することもできる。他の例ではまた、F119Pratt and Whitney軍用エンジンならびに8000Hシーメンス機を含む。
【0017】
さらに、計算装置30はユーザ50と通信することが示されている。ユーザ50は、たとえば、プログラマ、運転者、または別のコンピュータシステムであり得る。前記と計算装置30との間の対話については本明細書で説明する。
【0018】
計算装置30は、処理構成要素31(たとえば1つまたは複数のプロセッサ)、メモリ構成要素32(たとえば記憶階層)、入力/出力(I/O)構成要素33(たとえば1つまたは複数のI/Oインターフェースおよび/または装置)、およびバスなどの通信経路34を備えるところが示されている。さらに、計算装置30は、外部I/O装置/リソース35および記憶システム36と通信することが示されている。一実施形態では、処理構成要素31は、メモリ構成要素32および/または記憶システム36に少なくとも部分的に格納することができる、温度制御システム40などのプログラムコードを実行することができる。
【0019】
温度制御システム40の実施形態の作業を実行させるコンピュータプログラムコードは、Java(商標)、Smalltalk、C++などのようなオブジェクト指向プログラム言語、および「C」プログラム言語または同様なプログラム言語のような従来の手続き型プログラム言語を含めて、1つまたは複数のプログラム言語のいかなる組合せででも書くことができる。プログラムコードは、完全にユーザのコンピュータ上、部分的にユーザのコンピュータ上、独立型のソフトウェアパッケージとして、部分的にユーザのコンピュータ上で部分的に遠隔コンピュータ上、または完全に遠隔コンピュータもしくはサーバ上で実行することができる。後者の場合には、遠隔コンピュータは、ローカルエリアネットワーク(LAN)または広域ネットワーク(WAN)を含む任意のタイプのネットワークを介してユーザのコンピュータに接続することができ、あるいは、外部コンピュータに接続を行うこともできる(たとえばインターネットサービスプロバイダを使用しインターネットを介して)。
【0020】
プログラムコードを実行している間、処理構成要素31はデータを処理することができ、その結果、その後の処理のために、ターボ機械15の排気温度データ、燃焼温度データ、燃焼器温度上昇データ、および対応する作動限界値データなどのデータを、メモリ構成要素32、記憶システム36、および/またはI/O構成要素33から/へ読取りおよび/または書き込むことができる。通信経路34は、計算装置30内のそれぞれの構成要素間に通信リンクを形成する。I/O構成要素33は、ユーザ50が計算装置30と対話することを可能にする1つまたは複数の対人I/O装置または記憶装置、および/または、ユーザ50が任意のタイプの通信リンクを使用して計算装置30と通信することを可能にする1つまたは複数の通信装置を備え得る。この場合、温度制御システム40は、人間および/またはユーザ50が温度制御システム40と対話することを可能にする1組のインターフェース(たとえばグラフィカルユーザインターフェース(複数可)、アプリケーションプログラムインターフェースなど)を管理することができる。さらに、温度制御システム40は、任意の手法を使用して、それらに限定されないがターボ機械15の排気温度データ、燃焼温度データ、燃焼器温度上昇データ、対応する作動限界値などのデータ46を管理(たとえば記憶、回収、生成、操作、組織化、表示など)することができる。
【0021】
I/O装置35は、ユーザ50が計算装置30と対話することを可能にするあらゆる装置、または計算装置30が1つまたは複数の他の計算装置と通信することを可能にするあらゆる装置を備え得る。I/O装置35(それらに限定されないが、キーボード、ディスプレイ、ポインティングデバイスなどを含む)は、直接にまたは介在するI/O制御部を介してのいずれかで計算装置30に結合することができる。
【0022】
少なくとも、計算装置30は、それにユーザ50によってインストールされた温度制御システム40などのプログラムコードを実行することができる1つまたは複数の汎用計算用製品(たとえば計算装置)を備え得る(たとえば、パーソナルコンピュータ、サーバ、携帯端末など)。本明細書に使用される限り、プログラムコードは、情報処理能力を有する計算装置に、直接または以下の事項の任意の組合せ後のいずれかで特定の機能を実行させる任意の言語、コード、または表記での命令のあらゆる集合体を意味し得ると理解されたい。以下の事項とは、(a)別の言語、コード、または表記への変換、(b)異なるマテリアル形態での再生、および/または(c)解凍である。この場合、温度制御システム40は、システムソフトウェア、および/またはアプリケーションソフトウェアのあらゆる組合せとして実現することができる。
【0023】
さらに、温度制御システム40、および本明細書に記載された様々な制御システムはまた、たとえばターボ機械の全体制御システムの一部として、方法(複数可)または計算プログラム製品(複数可)として実現することもできることを、当業者は理解するであろう。したがって、本発明の実施形態は、完全にハードウェアの実施形態、完全にソフトウェアの実施形態(ファームウェア、常駐ソフトウェア、マイクロコードなどを含む)、またはソフトウェアとハードウェア態様を組み合わせた実施形態の形を取ることができ、本明細書では、それらは全て一般に、回路、モジュール、またはシステムと呼称することができる。
【0024】
少なくとも、計算装置30の技術的効果は、作動中のターボ機械15の温度を制御する処理命令を発することである。計算装置30の別の実施形態では、計算装置30は、温度制御システム40を介し、それらには限定されないが、排気温度、燃焼温度、および燃焼器温度上昇データを含めて、ターボ機械15に関する作動パラメータを監視し、記録し、追跡することができる。
【0025】
さらに、温度制御システム40は、受け取り部41、コンパレータ42、および処置生成部43などの一連のモジュールを使用して実行され得る。この場合、モジュールは、計算装置30が、温度制御システム40によって用いられる一連のタスクを実行することを可能にすることができ、温度制御システム40の他の部分から離れて独立に展開および/または実行することができる。温度制御システム40は、特定用途機/ハードウェアおよび/またはソフトウェアを備えるモジュールを具備し得る。いずれにしても、2つ以上のモジュールおよび/またはシステムが、それらのそれぞれのハードウェアおよび/またはソフトウェアの一部/全てを共有することができることを理解されたい。
【0026】
本明細書で使用される用語「構成要素」は、あらゆる手法を用いてその形態に関して記載された機能を実行する、ソフトウェアを有しまたは有さない、ハードウェアのあらゆる形態を意味し、他方、モジュールという用語は、計算装置30が計算装置30に関して記載された機能をあらゆる手法を用いて実行することを可能にするプログラムコードを意味する。処理構成要素31を備える計算装置30のメモリ構成要素32内に格納されたとき、モジュールは、機能を実行する構成要素の実質的な一部分になる。いずれにしても、2つ以上の構成要素、モジュールおよび/またはシステムが、それらのそれぞれのハードウェアおよび/またはソフトウェアの一部/全てを共有することができることを理解されたい。さらに、本明細書で説明される機能の一部は、実行されないこともあり、あるいは、追加の機能を計算装置30の一部として備えることもあることを理解されたい。計算装置30が複数の計算装置を備えるとき、各計算装置は、温度制御システム40の一部分(たとえば1つまたは複数のモジュール)のみをそれに包含して有することもある。
【0027】
ただし、計算装置30および温度制御装置40は、本発明の様々な処理ステップを実行することができる様々な可能な等価の計算装置を単に表していることを理解されたい。これについて、他の実施形態では、計算装置30は、特定の機能を果たすためのハードウェアおよび/またはコンピュータプログラムコードを備える任意の特定用途計算用製品、特定用途ハードウェア/ソフトウェアと汎用ハードウェア/ソフトウェアとの組合せを備える任意の計算用製品などを備え得る。それぞれの場合、プログラムコードおよびハードウェアは、標準的なプログラム技法および技術的技法それぞれを用いて生成することができる。
【0028】
同様に、コンピュータインフラストラクチャ20は、本明細書に記載の発明(複数可)を実行するための様々なタイプのコンピュータインフラストラクチャの例示に過ぎない。たとえば、一実施形態では、コンピュータインフラストラクチャ20は、本明細書に記載の様々な処理ステップを実行するために、ネットワーク、共有メモリなどのあらゆるタイプの有線および/または無線通信リンク上で通信する2つ以上の計算装置(たとえばサーバクラスタ)を備え得る。通信リンクがネットワークを備えるとき、そのネットワークは、1つまたは複数のタイプのネットワーク(たとえばインターネット、広域ネットワーク、ローカルエリアネットワーク、仮想私設ネットワークなど)の任意の組合せを備え得る。
【0029】
また、介在する私設ネットワークまたはパブリックネットワークを介して他のデータ処理システムまたは遠隔プリンタもしくは記憶装置にデータ処理システムを結合することを可能にするために、ネットワークアダプタが、システムに結合され得る。モデム、ケーブルモデム、およびイーサーネットカードが、ほんのいくつかの現在利用可能なタイプのネットワークアダプタであり得る。いずれにしても、計算装置間の通信には、様々なタイプの伝送技法の任意の組合せを使用することができる。
【0030】
温度制御システム40は、計算装置30が、ターボ機械15の温度を制御する処理命令を発することを可能にする。温度制御システム40は、ターボ機械15、特にタービンシステム17のガスタービンを、ターボ機械15を損傷し得る温度制限値を超えることから保護するために設けられる。受け取り部41は、作動中のターボ機械15の温度パラメータを受け取る。たとえば、受け取り部41は、排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取ることができる。
【0031】
本発明の実施形態では、Texhは、ターボ機械15から出る排気ガスの直の温度を表し得る。Tfireは、ターボ機械15の燃焼器(図示せず)の燃焼温度を表し得る。Triseは、ターボ機械15の燃焼器を通しての温度上昇を表し得る。一実施形態では、受け取り部41はまた、作動中のターボ機械15の温度を制御するために使用することができる、作動中のターボ機械15の任意の数の追加の温度パラメータおよび対応する作動限界値を受け取ることができる。
【0032】
受け取り部41は、ターボ機械15の温度パラメータおよび対応する作動限界値を受け取る。一実施形態では、受け取り部41は、Texh、Tfire、およびTriseパラメータ、ならびに対応するTexh、Tfire、およびTrise作動限界値を受け取ることができる。受け取り部41はまた、ターボ機械15の作動、特に温度制御に関係し得る、既知または今後分かる任意の、ターボ機械15の温度パラメータデータおよび/または作動限界値データを受け取ることができる。
【0033】
受け取り部41は、温度パラメータおよび対応する作動限界値をユーザ50から受け取ることもできる。たとえば、ユーザ50は、Texh、Tfire、およびTrise作動限界値を別の計算用製品から計算装置30へ入力する運転者またはプログラマでもよい。あるいは、ユーザ50は、Texh、Tfire、およびTriseパラメータおよび対応する作動限界値をI/O構成要素33を介して計算装置30に送る別のコンピュータシステムの外部計算装置(複数可)でもよい。さらに、ユーザ50は、本明細書に記載のように計算装置30にリンクしてもよく、ターボ機械15の作動、特に温度制御に関係し得る、既知または今後分かる任意の、ターボ機械15の温度パラメータデータおよび/または作動限界値データを、任意の従来の態様で、提供することもできる。したがって、受け取り部41は、上記のいずれをも受け取ることができる。
【0034】
コンパレータ42は、Texh、Tfire、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較する。一実施形態では、コンパレータ42は、さらに判定部47を備え得、判定部47は、Texh、Tfire、およびTriseパラメータが、作動中のターボ機械15のTexh、Tfire、およびTrise作動限界値を超えるか否かを判定する。別の実施形態では、判定部47は、任意の温度パラメータが、ターボ機械15のその対応する作動限界値を超えるか否かを判定することができる。さらに別の実施形態では、判定部47は、任意の温度パラメータが、ターボ機械15のその対応する作動限界値を、所定の温度値だけ超えるか否かを判定することができる。その温度値は、たとえば5℃、10℃、15℃などの値であり得る。
【0035】
コンパレータ42はまた、ターボ機械15の作動、特に温度制御に関係し得る、既知または今後分かる任意の、ターボ機械15の温度パラメータデータおよび/または作動限界値データを比較することができる。続いて、判定部47もまた、既知または今後分かる任意の温度パラメータデータが、その対応する作動限界値を超えるか否か、および/またはその対応する作動限界値を所定の温度値だけ超えるか否かを判定することができる。
【0036】
処置生成部43は、ユーザ50に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して、アラームまたはトリップなどの処置を生成する。一実施形態では、アラームまたはトリップは、パラメータの1つが、作動限界値をある時間、たとえば0.5秒間超過すると生成され得る。ターボ機械15の温度制御を維持することができるように、アラームまたはトリップを起こすいかなる時間経過でも選択することができることを、当業者は理解するであろう。さらに、処置生成部43は、その対応する作動限界値を超過する既知または今後分かる任意の温度パラメータデータの少なくとも1つに応答して、アラームまたはトリップを生成することができる。
【0037】
温度制御システム40は、生成されたユーザ50に対するアラームおよびトリップを、たとえばユーザインターフェースモジュール44を介して送出することができる。一実施形態では、ユーザインターフェースモジュール44は、ターボ機械15制御室内にグラフィカルユーザインターフェースを設けることができる。
温度制御方法論
図2を参照すると、作動中のターボ機械15の温度を制御する方法の実施形態が示されている。ステップS1は、計算装置30を使用して、受け取り部41が、作動中のターボ機械15の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップを含む(図1参照)。
【0038】
図2のステップS1の一実施形態では、温度パラメータを受け取る受け取り部41は、ターボ機械15の排気温度(Texh)を受け取るステップS1Aと、ターボ機械15の燃焼温度(Tfire)を受け取るステップS1Bと、ターボ機械15の燃焼器温度上昇(Trise)を受け取るステップS1Cとを含む。一実施形態では、受け取り部41は、Texh、Tfire、およびTriseパラメータを計算用製品、または別のコンピュータシステム(図示せず)(そのコンピュータシステムはTexh、Tfire、およびTriseパラメータを独立に計算する)の外部計算装置(複数可)から本明細書に記載のようにI/O構成要素33を介して独立に受け取ることもできる。Texhパラメータは、たとえば、ターボ機械15の作動中、任意の所与の時点での複数のTexh測定値の平均を取ることによって計算することができることを当業者は理解するであろう。Texh測定値は、ターボ機械15が含むサーモカップル18によって取得することができる(図1参照)。
【0039】
一実施形態では、受け取り部41は、ターボ機械15の様々な作動状態に際して上記のパラメータの1つまたは複数の測定値を直接取得することによってTexh、Tfire、およびTriseパラメータを求めることができる計算用製品(複数可)、別のコンピュータシステム(複数可)の外部計算装置(複数可)などからTexh、Tfire、およびTriseパラメータを受け取ることができる。あるいは、Texh、Tfire、およびTriseパラメータは、様々な作動状態におけるターボ機械15の燃料流量、タービン速度、入口温度、パワー出力、圧縮機排出温度、圧縮機排出圧力などの様々な作動入力値および出力値を使用して上記の1つまたは複数の温度パラメータを求める外部コンピュータモデリングシステムによって推定することができる。
【0040】
Texh、Tfire、およびTriseパラメータならびにその他を求めるために使用することができる計算モデリングシステムおよび方法の例は、米国特許第7,742,904号に記載のモデルベース式制御システムでもよく、同特許は参照によりその全体が本明細書に援用される。明快さおよび便宜上の理由で、米国特許第7,742,904号からのある部分が、この出願の計算モデリングシステム節に説明されている。
【0041】
別の実施形態では、方法ステップS1は、受け取り部41が、作動中のターボ機械15の1つまたは複数の追加の温度パラメータを受け取るステップをさらに含むことができる。1つまたは複数の追加の温度パラメータは、積極的に制御することができる、作動中のターボ機械15の温度パラメータを直接または間接に表すことができる任意の温度パラメータでよい。
【0042】
一実施形態では、1つまたは複数の追加の温度パラメータは、ターボ機械15の様々な作動状態において上記のパラメータの1つまたは複数の測定値を直接取得することによって1つまたは複数の追加の温度パラメータを求めることができる計算用製品(複数可)、別のコンピュータシステム(複数可)の外部計算装置(複数可)などから受け取り部41によって受け取ることができる。あるいは、1つまたは複数の追加の温度パラメータは、様々な作動状態におけるターボ機械15の様々な作動入力値および出力値を使用して上記の1つまたは複数の温度パラメータを求める、外部コンピュータのモデリングシステム(この出願の計算モデリングシステム節に記載の米国特許第7,742,904号の一部分を参照)によって推定することができる。
【0043】
図2を参照すると、ステップS2は、計算装置30を使用して、コンパレータ42が、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較するステップを含む(図1参照)。図2の方法ステップS2の一実施形態では、コンパレータ42が温度パラメータを対応する作動限界値と比較するステップは、ステップS2Aを含み、このステップS2Aは、受け取り部41が、作動中のターボ機械15のTexh、Tfire、およびTrise作動限界値を受け取るステップを含む(図1参照)。
【0044】
受け取り部41は、本明細書に記載のようにI/O構成要素33を介して、それに限定されないが、作動限界値を入力する運転者またはプログラマなどのユーザ50から、別の計算用製品(複数可)から、または作動限界値を計算する別のコンピュータシステム(図示せず)の外部コンピュータ装置(複数可)から作動限界値を受け取ることができる(図1参照)。一実施形態では、Texh、Tfire、およびTrise作動限界値は個々に、複数の作動限界値を包含することができ、たとえば、Tfire作動限界値は、本明細書に記載のTfireアラーム限界値および/またはTfireトリップ限界値を包含することができる。
【0045】
方法ステップS2Aの別の実施形態では、受け取り部41は、ステップS1で受け取った1つまたは複数の温度パラメータにそれぞれ対応する、作動中のターボ機械15の1つまたは複数の追加の作動限界値をさらに受け取ることができる。1つまたは複数の追加の作動限界値は、本明細書で説明されるようにたとえば温度対パワーによって定義することができる、ターボ機械15の任意の作動領域に関するものであってよいことを当業者は理解するであろう。1つまたは複数の追加の作動限界値は、作動ベースロード曲線、アラーム限界値、トリップ限界値、絶対限界値などを含み得る(この出願の計算モデリングシステム節に記載の米国特許第7,742,904号の一部を参照のこと)。
【0046】
作動温度限界値の一実施形態において、図3〜5は、Texh、Tfire、およびTrise作動限界値を表す曲線を示す。各図において、y軸は、個々の作動領域に関し度C単位で増加する温度を表し、単位は下から上へ増加する。x軸は、増加する圧縮機圧力比を表し、左から右へ増加する。
【0047】
図3を参照すると、ターボ機械15のTfire作動領域を表すグラフが示されている。曲線B1は、Tfireの作動ベースロード曲線を表し得る。Tfireベースロード曲線は、ターボ機械15の正常作動状態が存在する領域を表すことができる。曲線A1は、Tfireアラーム限界値を表し得る。Tfireアラーム限界値は、ターボ機械15の作動状態が、正常状態を超え、注意を必要とし得るが、ターボ機械15のトリップ(停止)を行わなくてよい領域を表すことができる。曲線A1は、曲線A1が本明細書に記載のようなアラーム限界値を表すことができる、曲線B1より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。
【0048】
曲線T1は、Tfireトリップ限界値を表し得る。Tfireトリップ限界値は、ターボ機械15の作動状態が、正常状態を超え、ターボ機械15を損傷する可能性があり得、ターボ機械15のトリップを当然行い得る領域を表すことができる。曲線T1は、曲線T1が本明細書に記載のようなトリップ限界値を表すことができる、曲線B1より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。
【0049】
図4を参照すると、ターボ機械15のTexh作動領域を表すグラフが示されている。一実施形態では、Texh作動領域は、約260℃から約820℃の温度範囲にあり得る。曲線B2は、Texhの作動ベースロード曲線を表し得る。Texhベースロード曲線は、ターボ機械15の正常作動状態が存在する領域を表すことができる。曲線A2は、Texhアラーム限界値を表し得る。Texhアラーム限界値は、ターボ機械15の作動状態が、正常状態を超え得、注意を必要とし得るが、ターボ機械15のトリップを行わなくてよい領域を表すことができる。曲線A2は、曲線A2が本明細書に記載のようなアラーム限界値を表すことができる、曲線B2より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線A2は、曲線B2に沿った各点でそれより約3℃高くし得る。
【0050】
曲線T2は、Texhトリップ限界値を表し得る。Texhトリップ限界値は、ターボ機械15の作動状態が、正常状態を超え得、ターボ機械15を損傷する可能性があり得、ターボ機械15のトリップを当然行い得る領域を表すことができる。曲線T2は、曲線T2が本明細書に記載のようなトリップ限界値を表すことができる、曲線B2より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線T2は、曲線B2に沿った各点でそれより約6℃高くし得る。
【0051】
曲線F2は、Texh絶対限界値を表し得る。Texh絶対限界値は、ターボ機械15の作動状態が、危険であり得、トリップを開始しなければターボ機械15に最終的に損傷を生じさせ得る領域を表す。曲線F2は、曲線F2が本明細書に記載のような絶対限界値を表すことができる、曲線B2より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線F2は、各パワー装置に対して単一の温度、すなわち作動領域全体に亘る直線での限界値であり得る。
【0052】
図5を参照すると、ターボ機械15のTrise作動領域を表すグラフが示されている。曲線B3は、Triseの作動ベースロード曲線を表し得る。Triseベースロード曲線は、ターボ機械15の正常作動状態が存在する領域を表すことができる。曲線A3は、Triseアラーム限界値を表し得る。Triseアラーム限界値は、ターボ機械15の作動状態が、正常状態を超え、注意を必要とし得るが、ターボ機械15のトリップ(停止)を行わなくてよい領域を表すことができる。曲線A3は、曲線A3が本明細書に記載のようなアラーム限界値を表すことができる、曲線B3より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線A3は、曲線B3に沿った各点でそれより約3℃高くし得る。
【0053】
曲線T3は、Triseトリップ限界値を表し得る。Triseトリップ限界値は、ターボ機械15の作動状態が正常状態を超え、ターボ機械15を損傷する可能性があり得、ターボ機械15のトリップを当然行い得る領域を表すことができる。曲線T3は、曲線T3が本明細書に記載のようなトリップ限界値を表すことができる、曲線B3より上の任意の特定の温度範囲に来るように選定することができることを当業者は理解するであろう。一実施形態では、曲線T3は、曲線B3に沿った各点でそれより約6℃高くし得る。
【0054】
前述の実施形態では、作動限界値A1、T1、A2、T2、F2、A3、およびT3は、1つの入力変数、すなわち圧縮機圧力比の関数としてそれぞれ定義されていた。上述の作動限界値は、作動中のターボ機械15の作動領域を表す追加の入力変数または様々な入力変数によって定義することができることを当業者は理解するであろう(図1参照)。追加の入力変数は、直接測定し、計算し、または本明細書に記載のように推定することができる。
【0055】
図3〜5に示された作動領域に関する温度範囲、すなわち温度対圧縮機圧力比は、同じである必要はなく、図示の各作動領域に関して特有であり、類似し、または重なり合っていてもよいことを当業者は理解するであろう。本明細書に記載のターボ機械の温度を制御する方法のいくつかの実施形態を実施することにおいて実現し得る利点は、ターボ機械の複数の作動領域が定義されると、複数の作動領域が、ターボ機械15の対応する作動負荷での許容作動温度をより良く表すので、作動中のターボ機械15のより十分な温度制御を達成することができることであることが判明している。
【0056】
図2の方法ステップS2の実施形態では、計算装置30を使用して、コンパレータ42が、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較し、ステップS2はステップS2Bを含み、判定部47が、TexhパラメータがTexh作動限界値を超えるか否か、TfireパラメータがTfire作動限界値を超えるか否か、およびTriseパラメータがTrise作動限界値を超えるか否かの少なくとも1つを判定する(図1参照)。
【0057】
ステップS2Bの実施形態では、Texh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を超えているか否か判定するために、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、対応する作動限界値と比較することができる。たとえば、ステップS1からのTexh、Tfire、およびTriseパラメータを、図3〜5それぞれに示された対応するTexh、Tfire、およびTrise限界値に対してプロットすることができる。Texh、Tfire、およびTriseパラメータが対応するTexh、Tfire、およびTrise作動限界値より上に位置する場合には、Texh、Tfire、およびTriseパラメータはそれらの対応する作動限界値を超えていると考えられる。
【0058】
本明細書に記載のように、判定部47は、少なくとも1つのTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を超えているか否か判定することができる。別の実施形態では、判定部47はまた、少なくとも1つのTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を、それに限定されないが0.5秒などの時間、超えているか否か判定することができる。別の実施形態では、判定部47はまた、少なくとも1つのTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値を、それに限定されないが3℃、6℃、および9℃などの所定の温度値だけ、超えているか否か判定することができる。
【0059】
本明細書に記載のターボ機械の温度を制御する方法のいくつかの実施形態を実施することにおいて実現し得る利点は、ターボ機械の複数の作動限界値が定義されると、その複数の作動温度限界値によって、実際の作動温度がターボ機械15の対応する作動負荷での正常作動温度を超えた可能性のあることを表す警告が増強されるので、作動中のターボ機械15のより十分な温度制御を達成することができることであることが判明している。
【0060】
本明細書に記載のターボ機械の温度を制御する方法のいくつかの実施形態を実施することにおいて実現し得る利点は、Texh、Tfire、およびTriseパラメータの少なくとも1つがそれらの対応する作動限界値をそれによって超え得る所定の温度値が定義されたとき、その所定の温度値によって、ユーザ50が、アラームおよび/またはトリップが生成される前にTexh、Tfire、およびTriseパラメータがそれらの対応する作動限界値をどの程度超え得るかに基づいて、正確な制御を行うことが可能になるので、作動中のターボ機械15のより十分な温度制御を達成することができることであることもまた判明している。
【0061】
一実施形態では、図2のステップS3は、処置生成部43が、ユーザ50に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップを含む(図1参照)。
【0062】
ステップS3の実施形態では、処置は、たとえば、少なくとも1つのTexh、Tfire、およびTriseパラメータが、ターボ機械15の作動中のいかなる時点でも、対応するTexh、Tfire、およびTrise作動限界値を超えたことに応答するアラームまたはトリップを含む。アラームは、コンピュータまたは携帯端末へのテキストメッセージなどの電子通知、制御パネル上の点滅ボタンおよび/または制御室内の点滅ライトなどの視覚表示、クラクションまたはサイレンなどの聴覚表示を含み得る。アラームは、ユーザインターフェースモジュール44、および/またはI/O構成要素33を介してユーザ50に通知することができる。トリップは、ターボ機械15の停止であり得る。
【0063】
ステップS3の別の実施形態では、トリップは、ターボ機械15の自動停止、またはアラームまたはトリップの表示後にユーザ50によって行われる手動停止を含み得る(図1参照)。
【0064】
ステップS3の別の実施形態では、処置の一例は、その対応する作動限界値を超え得た温度パラメータが作動限界値より下のレベルに戻るまで、ターボ機械15から負荷を取り除く、たとえばタービンのパワー出力を減らすことをさらに含み得る。
【0065】
あるいは、処置生成部43は、ターボ機械15の作動中、判定部47が判定するTexh、Tfire、およびTriseパラメータの少なくとも1つが、対応するTexh、Tfire、およびTrise作動限界値をある時間超過したことに応答するトリップを含み得る処置を生成し得る。その時間は、ターボ機械15の作動中の温度のスパイクまたは温度パラメータの外れ値によって生じる可能性のある不必要なトリップを排除するために用いることができる(図1参照)。一実施形態では、Tfireパラメータは、Tfireトリップ限界値を約0.5秒間超過した後に、処置生成部43が処置を起こし得る。別の実施形態では、Texhパラメータは、Texhトリップ限界値を約0.5秒間超過した後に、処置生成部43が処置を起こし得る。さらに別の実施形態では、Triseトリップ限界値を約0.5秒間超過した後に、Triseパラメータは、処置生成部43が処置を起こし得る。
【0066】
ステップS3の別の実施形態では、処置生成部43は、たとえば、Texh、Tfire、およびTriseパラメータの少なくとも1つが、ターボ機械15の作動中、判定部47によって判定される、ある時間それらの対応する作動限界値を、それに限定されないが3℃、6℃、または9℃の増分などの所定の温度値だけ超えたことに対応するアラームまたはトリップを含み得る処置を生成し得る。別の実施形態では、処置生成部43は、様々な所定の温度値に基づいて複数の処置を生成し得る。たとえば、TexhがそのTexh作動限界値を3℃だけ超えた場合、アラームが生成され得る。TexhがそのTexh作動限界値を6℃だけ超えた場合、トリップが生成され得る。
計算モデリングシステム
作動しているガスタービンの一部の作動パラメータを推定するために適応型ガスタービンモデルを用いることができるガスタービン制御システムを提示する。モデル化することができる作動パラメータには、たとえば、排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータ、ならびに/または対応するTexh、Tfire、およびTrise作動限界値、さらに加えて、追加のパラメータが含まれる。モデルは、制御アルゴリズムに使用するためにセンサによる検知、たとえば測定を直接行えない作動パラメータを推定することができる。モデルはまた、測定される作動パラメータを推定することもでき、それによって、推定された状態と測定された状態とを比較することができる。その比較は、ガスタービンが作動し続けている間に、モデルを自動的に調整するのに使用することができる。
【0067】
ガスタービンモデルは、たとえば周囲圧力、圧縮機入口案内静翼位置、燃料流量、入口ブリード熱流量、発電機パワー損失、入口および排気ダクト圧力損失、圧縮機入口温度など、測定された状態を入力パラメータとして受け取ることができる。モデルは、たとえば排出ガス温度、燃焼温度、燃焼器上昇温度、圧縮機排出圧力および温度、ならびにパワー出力など、推定作動パラメータを生成することができる。推定作動パラメータは、測定作動パラメータと共にガスタービンを制御するために使用することができる。たとえば、測定作動パラメータおよび推定作動パラメータは、ガスタービン作動状態、たとえば所望のタービン排出温度、燃焼器全体燃料流量、燃料分割スケジュール、および入口ブリード熱流量を設定するために制御スケジュールに入力することができる。さらに、測定作動パラメータおよび推定作動パラメータは、モデルの精度を評価し、モデルを調整するために使用することができる。
【0068】
ガスタービンモデルは、恒常的、自動的、およびリアルタイムに、カルマンフィルタを使用して調整することができる。カルマンフィルタは、様々なセンサからの測定ガスタービンパラメータとモデルから出力される推定パラメータとの差を示す入力信号を受け取ることができる。カルマンフィルタはまた、入力としてカルマンフィルタゲインマトリックス(KFGM)を受け取ることができ、カルマンフィルタゲインマトリックスは、モデルパフォーマンス乗数の修正に対するモデル推定パラメータの不確実性重み付け感度を表す数字の配列である。カルマンフィルタは、モデルを調整し、推定ガスタービンパラメータの精度を向上させるために用いることができるパフォーマンス乗数を生成するために、供給される入力を使用することができる。
【0069】
カルマンフィルタゲインマトリックス(KFGM)は、一連の数学方程式によって計算することができる。これらの方程式は、入力としてモデル感度マトリックス(MSM)およびモデルおよび測定の不確実性の推定値を受け取ることができる。MSMは、制御部常駐ガスタービンモデルの摂動および評価によってリアルタイムにオンラインで計算することができる。カルマンフィルタは、推定作動パラメータと測定作動パラメータとの差を最小化するように乗数値を最適化することができる。
【0070】
ガスタービンモデルは、実際のガスタービンの変化する効率、流れ容量、および他のパラメータに適合することができる。カルマンフィルタによって生成される出力パフォーマンス乗数は、測定されたガスタービンのパラメータにより良く対合するようにモデルを適合させることができる。カルマンフィルタはまた、たとえば、長期に亘る作動において生じるガスタービンの構成要素効率の劣化および空気流れ容量の変化を取り入れてモデルを調整することもできる。
【0071】
MSMおよびKFGMは、オンラインでリアルタイムに計算することができるので、カルマンフィルタ構造は、利用可能なセンサの数の変化、およびモデルの推定出力パラメータと比較するのに利用可能な測定出力パラメータのタイプの変化に適合することができる。センサの不具合などにより、ガスタービンのある作動パラメータがもはや測定されないとき、カルマンフィルタ構造は、測定パラメータの欠落を考慮に入れて変更され得、残りのガスタービンの測定状態に基づいてパフォーマンス乗数の生成を続け得る。
【0072】
図6を参照すると、ガスタービン110の実施形態が示されている。ガスタービン110は、圧縮機112、燃焼器114、圧縮機112に駆動的に結合されたタービン116、およびコンピュータ制御システム118(制御部)を備え得る。圧縮機112への入口ダクト120は、周囲の空気および場合によっては噴射水を圧縮機112へ供給することができる。入口ダクトは、入口ダクト120を通って圧縮機112の入口案内静翼(I.G.V.)121に流れ込む周囲空気の圧力損失の因になり得るダクト、フィルタ、スクリーン、および騒音吸収装置を有し得る。タービン116の排気ダクト122は、燃焼ガスをタービン116の出口から、たとえば排出物制御および騒音吸収装置を通って導く。排気ダクト122は、タービン116に背圧を加え得る騒音吸収材および排出物制御装置を備え得る。入口圧力損失および背圧の大きさは、ダクト120、122への構成要素の追加、ならびに入口および排気ダクトを塞ぐ埃や泥により、時間が経つと変化し得る。タービン116は、電力を発生する発電機124を駆動することができる。圧縮機112への入口損失およびタービン116排気圧力損失は、ガスタービン110を通る修正流量の関数になる傾向がある。
【0073】
ガスタービン110の作動は、タービン、発電機、および周囲環境の様々な観察可能な状態を検出する複数のセンサシステム126によって監視することができる。多くの場合、2つまたは3つの冗長センサで同じ被測定状態を測定することができる。たとえば、3つの冗長温度センサシステム126のグループが、ガスタービン110を取り巻く周囲温度、圧縮機排出温度、タービン排気ガス温度、およびガスタービン110を通るガス流れの他の温度測定値を監視することができる。同様に、3つの冗長圧力センサシステム126のグループが、周囲圧力、ならびに圧縮機入口および出口、タービン排気、ガスタービン110を通るガス流れの他の位置での静圧および動圧レベルを監視することができる。3つの冗長湿度センサシステム126、たとえば乾湿球温度計のグループが、圧縮機112の入口ダクト内の環境湿度を測定することができる。3つの冗長センサシステム126のグループはまた、ガスタービン110の作動に関する様々なパラメータを検知することができる流量センサ、速度センサ、火炎検出センサ、バルブ位置センサ、案内静翼角度センサなどを備え得る。
【0074】
本明細書で使用される限り、「パラメータ」は、タービン内の定められた位置での温度、圧力、ガス流量など、タービンの作動状態を定義するために使用することができる項目を意味する。一部のパラメータは測定することができ、すなわち検知し直接知ることができる。他のパラメータは、モデルによって推定することができ、間接的に知ることができる。測定および推定されたパラメータは、所与のタービン作動状態を表すために使用することができ、たとえば図3〜5を参照されたい。
【0075】
燃料制御システム128は、燃料供給源から燃焼器114へ流れる燃料、1次燃料ノズルと2次燃料ノズルへ流入する燃料間の分割、および燃焼チャンバに流入する2次空気と混合する燃料の量を調節することができる。燃料制御部はまた、燃焼器114に対する燃料のタイプを選択することもできる。燃料制御システム128は、独立した装置でもよく、あるいは主制御部118の構成要素でもよい。
【0076】
主制御部118は、N.Y.州スケネクタディのGE Industrial & Power Systemsによって刊行されたRowen,W.I.の「SPEEDTRONICTM Mark V Gas Turbine Control System」、GE−3658D、に記載されているような、General Electric SPEEDTRONIC(登録商標)ガスタービン制御システムでもよい。制御部118は、センサの入力および人間の運転者からの指令を用いてガスタービン110の作動を制御するプログラムを実行するプロセッサ(複数可)を有するコンピュータシステムでもよい。主制御部118によって実行されるプログラムは、燃焼器114への燃料流量を調節するスケジューリングアルゴリズムを含み得る。主制御部118によって生成される命令は、ガスタービン110のアクチュエータに、たとえば、燃焼器へ流れる燃料の流量、燃料分割、およびタイプを調節する、燃料供給源と燃焼器との間のバルブ(アクチュエータは図示せず)を調節させ、圧縮機の入口案内静翼121(アクチュエータ127)を調節させ、ガスタービンの他の制御設定を行わせる。
【0077】
スケジューリングアルゴリズムは、主制御部118が、たとえば、タービン排気中のNOXおよびCOの排出をある所定の排出物制限値内に保ち、燃焼器燃焼温度を所定の温度制限値内に保つことを可能にすることができる。スケジューリングアルゴリズムは、その時点の圧縮機圧力比、周囲の比湿、入口圧力損失、およびタービン排気背圧などのパラメータ変数に関する入力を有し得る。制御システム118は、ガスタービン110の作動可能限界値を守りながら性能目標を満足するように、たとえば所望のタービン排気温度および燃焼器燃料分割の設定など、ガスタービン110をスケジュールするためにアルゴリズムを適用することができる。
【0078】
図7を参照すると、ガスタービンおよび適応型リアルタイムエンジンシミュレーションモデル130(ARES)の実施形態の高位のブロックダイアグラムが示されている。ARESモデル130は、ガスタービン110の複数の作動パラメータをリアルタイムに電子的にモデル化することができる。ガスタービン110は、「基本的入力」(
【0079】
【数1】
)132と呼称される複数の観察可能なパラメータを有し得る。基本的入力(
【0080】
【数2】
)132は、センサによって直接計測することができ、周囲状態(A)、入口案内静翼(IGV)の角度、燃焼器114へ流れる燃料の量(FUEL)、およびガスタービン110の回転速度(SPEED)を含み得る(それらに限定されない)。列挙された基本的入力(
【0081】
【数3】
)132は、例示的実施形態としてよく、検知入力を収集することができることを単に例示するために示されている。特定の検知入力がこの開示に必須なのではなく、それは特定のガスタービン設備での制御システムおよび利用可能なセンサに依存する。
【0082】
用語「基本的」は、これら測定パラメータ132のそれぞれが、本明細書に開示されたモデル130の個々の実施形態に入力されなければならず、または、あらゆるそのようなガスタービンモデルがこれらの入力を有さなければならないことを意味するものではない。ガスタービンのリアルタイムモデル130への基本的入力(
【0083】
【数4】
)132は、一部、全て、および/または他の入力を含み得る。基本的入力という用語は、本明細書に開示された特定のモデルの実施形態に関して、これら入力が、実際の状態の測定値から取得され、モデルへの入力として用いられることを単に示す。
【0084】
基本的入力(
【0085】
【数5】
)132は、ガスタービン110のモデル130に入力することができる。これら入力は、モデル130によって、ガスタービン110の作動パラメータに対応する、モデル130の出力値(
【0086】
【数6】
)を生成するために用いられる。その出力は、1次モデル化出力(
【0087】
【数7】
)138を含み得、また、ガスタービン110の対応する測定作動パラメータ144と比較することができる。モデル化出力はまた、直接測定することができない、たとえば所望の燃料流量などのガスタービンパラメータを予測することができる拡張モデル化出力(
【0088】
【数8】
ext.)140も含み得る。拡張モデル化出力140は、所望の燃料流量を適用して燃焼器114への実際の燃料流量を制御することなどによって、ガスタービン110を作動させるために制御システムによって使用され得る。
【0089】
1次出力138およびそれらの対応する測定作動パラメータ(調整入力)144は、自動的、恒常的にモデル130を調整することができる誤差修正システム147に適用することができ、それにより、全てのモデル化出力(
【0090】
【数9】
および
【0091】
【数10】
ext.)がガスタービン110の作動状態を正確に予測することを保証する。モデル化出力138、140は、ガスタービン110の制御、メインテナンスの計画、およびガスタービン110の性能の予測を行うために使用することができる。モデル化出力の、ガスタービン110の制御、およびモデル130の調整以外の役割への応用法は、ガスタービン制御に関する当業者には周知である。
【0092】
モデル130の1次出力(
【0093】
【数11】
)138は、たとえば、発電機124などへのモデル化(M)パワー出力(POW_M)、モデル化タービン排気温度(EXHTEMP_MOD)、およびモデル化圧縮機状態(C_M)であり得る。1次出力(
【0094】
【数12】
)138に該当する数および個々のパラメータは、ガスタービンのモデルごとに変化し得る。さらに、1次出力(
【0095】
【数13】
)138は、ガスタービン110の作動中に変わることもあり、たとえば、センサが故障すれば、対応する測定パラメータが、1次出力の1つとの比較値としてそれ以上利用できなくなる。
【0096】
1次出力138は、測定され、たとえば検知された作動パラメータ(
【0097】
【数14】
)144、すなわち実際のパワー出力(POW_A)、タービン排気温度(EXHTEMP_A)、および圧縮機状態(C_A)などとそれぞれ対応し得る。測定パラメータ144は、ガスタービン110の対応する実際のパラメータを監視するセンサの出力信号に基づき得る。やはり複数の冗長センサが、測定パラメータ144のそれぞれを実測することができる。検知パラメータは、ガスタービンに対する特定の制御システムおよび利用可能なセンサに基づいて選択することができる。
【0098】
モデル130は、ガスタービン110のコンピュータ生成モデルであり得る。モデル130は、1次および拡張出力の数学的表現の配列であり得る。これらの表示のそれぞれは、モデル化出力パラメータ138、140の推定値を生成するために、入力値、たとえば基本的入力132に依拠し得る。数学的表現は、測定パラメータ値が取得できない状況で使用することができる代用出力パラメータ値138、140を生成することができる。ガスタービンのリアルタイムコンピュータモデルは、特に航空機用ガスタービンエンジンの制御に用いられる場合に周知である。産業用ガスタービンもまた、コンピュータモデルの対象になっている。たとえば、モデルは、1次出力のような検知される作動パラメータ、ならびに燃焼およびタービン入口温度、空気流量、および圧縮機ストールマージンのような検知されないパラメータの推定に使用することができる。モデル130は、物理学に基づく空気熱力学コンピュータモデル、回帰適合モデル、ニューラルネットモデル、または他の適切なガスタービンのコンピュータモデルであり得る。
【0099】
1次出力138は、測定パラメータ値144と比較することができる。測定値144は、モデル130を調整するために使用することができるので、調整入力と呼ぶことができる。1次出力138および測定パラメータ値144は、正規化モデル化出力(
【0100】
【数15】
)および正規化測定出力(
【0101】
【数16】
)を生成するために正規化146することができる。これら正規化出力は比較148することができ、たとえば、(Δ(POW_MOD,POW_A))のような差分信号(Δ(
【0102】
【数17】
,
【0103】
【数18】
))150を生成するために、POW_MODをPOW_Aと比較することができる。差分信号150は、測定された実際のパラメータに対するモデル化出力パラメータの誤差を示すことができる。一般に、1次出力138のそれぞれに対応する少なくとも1つの差分信号150が存在し得、個々のパラメータを測定する冗長センサのそれぞれに対応する差分信号が存在し得る。一般に、差分信号を生成するために、少なくとも1つの測定値144、たとえば調整入力が、各1次出力138に対して必要とされ得る。たとえばセンサの不具合のために、1つまたは複数の調整入力が取得できない場合、対応する差分信号(Δ(
【0104】
【数19】
,
【0105】
【数20】
))150は生成され得ないが、誤差修正システムはそれでも作動してモデル130を修正する。
【0106】
カルマンフィルタゲインマトリックス(KFGM−K)152が、差分信号150を入力として受け取ることができ、ガスタービンモデル130を調整するために使用される正規化修正係数調節値(
【0107】
【数21】
)160を生成することができる。図7に示すように、KFGMは、調整係数151を適用して差分信号150を調節することができ、正規化修正係数(
【0108】
【数22】
)160を生成することができる。比較的多数の差分信号150、たとえばPOW、EXHTEMP、およびCのそれぞれに関する冗長センサの出力によって、カルマンフィルタゲインマトリックスが、モデルを正確に調整するために使用することができ、モデルが正確な出力値(
【0109】
【数23】
および
【0110】
【数24】
ext)を生成することを保証することができる正規化修正係数160を生成することを可能にすることができる。
【0111】
差分信号150の欠落が、モデルを調整するカルマンフィルタゲインマトリックスの能力を減少させ得る(ただし消滅させはしない)。カルマンフィルタゲインマトリックス152の適応能力が、差分信号150の減少したセットを用いてカルマンフィルタゲインマトリックスがモデル130を調整し続けることを可能にすることができる。1つまたは複数の差分信号が取得できなくなったときモデルを自動的に調整するために、カルマンフィルタゲインマトリックス(K)152は、差分信号の欠落に対処するように修正することができる。したがって、ガスタービンは、センサが故障し、観察可能な作動状態に関する調整入力データが取得できないときでも、作動し続け、自動的に調整され得る。
【0112】
図8を参照すると、カルマンフィルタゲインマトリックス(KFGM)を生成することができる機構の実施形態が提示されている。波形線200は、図7を表しており、図7のK152を介して図8の線151に接続されている。図7および8を参照すると、モデル感度マトリックス(MSM)166は、一連の入力(基本的入力132、および一連の摂動パフォーマンス乗数、たとえば摂動修正および正規化差分信号164)をガスタービンモデル167(モデル130など)に適用することによって求めることができる。モデル167の1次出力の感度は、偏導関数解析168によって求めることができる。感度値を正規化169して、感度マトリックス(a,h)166を形成することができる。感度マトリックスを、オンラインフィルタゲイン計算165(たとえばカルマンフィルタ方程式)に適用して、最適調整値、たとえばゲイン値のマトリックス152を求めることができ、マトリックス152は、測定ガスタービン値とモデルによって予測された対応する値との差分信号(Δ(
【0113】
【数25】
,
【0114】
【数26】
))150に該当する差分信号に適用される。
【0115】
カルマンフィルタ方程式165は、1960年代にR.F.KalmanおよびBucyによって最初に公表され、図8に示されている。カルマンフィルタは当技術分野では知られており、制御システムの当業者はこれらのフィルタを熟知しているであろう。カルマンフィルタは、最適帰納的データ処理アルゴリズムである。
【0116】
カルマンフィルタゲインマトリックス(K)152は、差分信号(Δ(
【0117】
【数27】
,
【0118】
【数28】
))150に適用して正規化修正係数調節値160を生成することができる1つまたは複数の調整係数151を含み得る。正規化修正係数160は、現在の修正係数と事前の修正係数との差を平均化するために、事前の正規化修正係数(Z-1)158と加算156することができる。平均修正係数は、非正規化162され、それにより、たとえば構成要素効率および流れ容量を含み得るパフォーマンス乗数164(また、非正規化された修正係数)を生成することができる。非正規化修正係数164は、ガスタービンモデル130にたとえば乗数として適用することができ、その乗数は、ガスタービンをモデル化し、モデル化出力パラメータ値138、140を生成するアルゴリズムに適用される。乗数は、アルゴリズムを調節することによってモデルを調整し、それによって、ガスタービンの実際の作動を正確に表すモデル化パラメータ値を生成することができる。モデル化出力パラメータ値138、140は、ガスタービンへの燃料および空気流量を決定し、また、ガスタービンへの他の制御入力を決定するために用いることができる。
【0119】
用語「第1」「第2」などは、本明細書ではいかなる順序、量、または重要性をも意味するものではなく、ある要素を別の要素から区別するために使用され、また、用語「a」および「an」は、本明細書では量を限定することを意味するのではなく、言及されたアイテムが少なくとも1つ存在することを意味する。量と共に使用される修飾語「約」は、言及された数値を含み、文脈によって示される意味を有する(たとえば、特定の量の測定に伴う誤差の程度を含む)。本明細書で使用される接尾辞「(s)」は、それが修飾する語の単数および複数の両方を含むことを意味し、それによって、その語の1つまたは複数を含める(たとえば「metal(s)」は1つまたは複数の「metal」を含む)。本明細書で開示される範囲は、包括的であり、独立に組み合わせられる(たとえば、「約25重量%まで、または、より具体的には、約5重量%から約20重量%まで」という範囲は、両終端点および「約5重量%から約25重量%まで」の範囲の全ての中間値を含む、など)。
【0120】
本明細書では、ターボ機械の温度を制御する方法およびシステムとして示され説明されたが、本発明の態様は、様々な代替実施形態をさらに提供することを理解されたい。たとえば、一実施形態では、本発明は、少なくとも1つのコンピュータ可読媒体に格納されたコンピュータプログラムを提供し、そのプログラムは、実行されると、コンピュータシステムがターボ機械の温度を制御することを可能にする。この場合、コンピュータ可読媒体は、本明細書に記載のプロセスの一部または全てを実行する、温度制御システムプログラム40(図1)のようなプログラムコードを備える。用語「コンピュータ可読媒体」は、既知または今後開発される1つまたは複数の任意のタイプの実体的な表現用媒体を含み、その媒体から、プログラムコードのコピーが、計算装置によって読み取られ、再生され、または他の方法で伝送され得ることを理解されたい。たとえば、コンピュータ可読媒体は、1つまたは複数の携帯式記憶用製品、計算装置の1つまたは複数のメモリ/格納構成要素、紙などを含み得る。
【0121】
別の実施形態では、本発明は、本明細書に記載のプロセスの一部または全てを実行する、温度制御プログラム40(図1)のようなプログラムコードのコピーを生成する方法を提供する。この場合、コンピュータシステムは、本明細書に記載のプロセスの一部または全てを実行するプログラムコードのコピーを処理して、プログラムコードのコピーを一連のデータ信号内にエンコードするように、1つまたは複数のその特性が設定および/または変形された一連のデータ信号を生成し、第2の別の場所で受け取るように伝送することができる。同様に、本発明の実施形態は、本明細書に記載のプロセスの一部または全てを実行するプログラムコードのコピーを取得する方法を提供し、その方法は、本明細書に記載の一連のデータ信号を受け取り、その一連のデータ信号を、少なくとも1つのコンピュータ可読媒体に格納されるコンピュータプログラムのコピーに翻訳するコンピュータシステムを備える。いずれの場合も、一連のデータ信号は、任意のタイプの通信リンクを用いて送信/受信することができる。
【0122】
さらに別の実施形態では、本発明は、ターボ機械の温度を制御するシステムを生成する方法を提供する。この場合、コンピュータインフラストラクチャ20(図1)のようなコンピュータシステムを得る(たとえば、生成する、維持する、利用可能にする、など)ことができ、本明細書に記載のプロセスを実行する1つまたは複数の構成要素を得て(たとえば、生成する、取得する、使用する、修正する、など)、コンピュータシステムに配置することができる。この場合、配置は、(1)計算装置にプログラムコードをインストールすること、(2)コンピュータインフラストラクチャに1つまたは複数の計算装置および/またはI/O装置を付加すること、(3)コンピュータインフラストラクチャが本明細書に記載のプロセスを実行することができるようにコンピュータインフラストラクチャを組み込み、かつ/または修正すること、などの1つまたは複数を含み得る。
【0123】
本発明の態様は、予約購読、広告、および/または料金ベースにおいて本明細書に記載のプロセスを実行するビジネスメソドの一部分として実行することができることを理解されたい。すなわち、サービスプロバイダは、本明細書に記載されているような、ターボ機械の温度を制御することを提供することができる。この場合、サービスプロバイダは、1または複数の顧客に対して本明細書に記載のプロセスを実行する、コンピュータ構造20(図1)のようなコンピュータインフラストラクチャを運営(たとえば、生成、維持、支援など)することができる。報酬として、サービスプロバイダは、購読および/または料金契約の下に顧客(複数可)から支払いを受け、1または複数の第三者などへの広告の販売から支払いを受けることができる。
【0124】
本発明の様々な態様の前述の記載は、例示および説明のために提示されてきた。包括的であること、または本発明を開示された形態通りに限定することを意図するものではなく、明らかに、多くの修正および変更が可能である。当業者に明らかであり得るそのような修正および変更は、添付特許請求の範囲によって定義される本発明の範囲内に包含される。
【符号の説明】
【0125】
15 ターボ機械
17 タービンシステム
18 サーモカップル
19 ターボ発電機
20 コンピュータインフラストラクチャ
30 計算装置
31 処理構成要素
32 メモリ構成要素
33 I/O構成要素
34 通信経路
35 I/O装置
36 記憶システム
40 温度制御システム
41 受け取り部
42 コンパレータ
43 処置生成部
44 ユーザインターフェースモジュール
46 データ
47 判定部
50 ユーザ
110 ガスタービン
112 圧縮機
114 燃焼器
116 タービン
118 制御部
120 ダクト
121 入口案内静翼
122 ダクト
124 発電機
126 センサシステム
127 アクチュエータ
128 燃料制御システム
130 適応型リアルタイムエンジンシミュレーションモデル
132 基本的入力
138 1次モデル化出力
140 拡張モデル化出力
144 調整入力
146 正規化
147 誤差修正システム
148 比較
150 差分信号
151 調整係数
152 カルマンフィルタゲインマトリックス
156 加算
158 正規化修正係数
160 正規化修正係数調節値
162 非正規化
164 パフォーマンス乗数
165 オンラインフィルタゲイン計算
166 感度マトリックス
167 ガスタービンモデル
168 偏導関数解析
169 正規化
200 波形線
T1 Tfireトリップ限界値曲線
A1 Tfireアラーム限界値曲線
B1 Tfire作動ベースロード曲線
T2 Texhトリップ限界値曲線
A2 Texhアラーム限界値曲線
B2 Texh作動ベースロード曲線
F2 Texh絶対限界値曲線
T3 Triseトリップ限界値曲線
A3 Triseアラーム限界値曲線
B3 Trise作動ベースロード曲線
ステップS1 計算装置30を使用して、受け取り部41が、作動中のターボ機械15の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取る
ステップS1A ターボ機械15の排気温度(Texh)を受け取る
ステップS1B ターボ機械15の燃焼温度(Tfire)を受け取る
ステップS1C ターボ機械15の燃焼器温度上昇(Trise)を受け取る
ステップS2 計算装置30を使用して、コンパレータ42が、Texhパラメータ、Tfireパラメータ、およびTriseパラメータを、ターボ機械15の対応するTexh、Tfire、およびTrise作動限界値と比較する
ステップS2A 受け取り部41が、作動中のターボ機械15のTexh、Tfire、およびTrise作動限界値を受け取る
ステップS2B 判定部47が、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つがあるか否かを判定する
ステップS3 処置生成部43が、ユーザ50に対して、TexhパラメータがTexh作動限界値を超過したこと、TfireパラメータがTfire作動限界値を超過したこと、およびTriseパラメータがTrise作動限界値を超過したことの少なくとも1つに応答して処置を生成する
【特許請求の範囲】
【請求項1】
ターボ機械(15)の温度を制御する方法であって、
計算装置(30)を使用して、作動中の前記ターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップ(S1)と、
前記計算装置(30)を使用して、前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータを、前記ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するステップ(S2)と、
ユーザ(50)に対して、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップ(S3)と
を含む方法。
【請求項2】
受け取る前記ステップが、前記計算装置(30)と通信する外部コンピュータシステムから前記Texh、Tfire、およびTriseパラメータを受け取るステップを含む、請求項1記載の方法。
【請求項3】
処置を生成する前記ステップが、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して前記ターボ機械(15)のアラームまたはトリップを生じるステップを含む、請求項1記載の方法。
【請求項4】
ターボ機械(15)用の温度制御システム(40)であって、
作動中の前記ターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取る受け取り部(41)と、
前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータを、前記ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するコンパレータ(42)と、
前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して処置を生成する処置生成部(43)と
を備える
少なくとも1つの装置
を具備する温度制御システム(40)。
【請求項5】
前記受け取り部(41)が、前記計算装置(30)と通信する外部コンピュータシステムから前記Texh、Tfire、およびTrise作動限界値をさらに受け取る、請求項4記載の温度制御システム(40)。
【請求項6】
前記コンパレータ(42)が、前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータがその対応するTexh、Tfire、およびTrise作動限界値を超過したか否かを判定する判定部(47)を備える、請求項4記載の温度制御システム(40)。
【請求項7】
前記処置生成部(43)が、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して前記ターボ機械(15)のアラームまたはトリップを生成する、請求項4記載の温度制御システム(40)。
【請求項8】
実行されると、コンピュータシステムがターボ機械(15)の温度制御方法を実施できるようにする、少なくとも1つのコンピュータ可読媒体内で具体化されたプログラムコードを備えるコンピュータプログラムであって、前記方法が、
計算装置(30)を使用して、作動中の前記ターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップ(S1)と、
前記計算装置(30)を使用して、前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータを、前記ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するステップ(S2)と、
ユーザ(50)に対して、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップ(S3)と
を含むコンピュータプログラム。
【請求項9】
処置を生成する前記ステップが、前記計算装置(30)を使用して、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して前記ターボ機械(15)のアラームまたはトリップを生成するステップを含む、請求項8記載のコンピュータプログラム。
【請求項10】
作動中の前記ターボ機械(15)の1つまたは複数の追加の温度パラメータを受け取るステップと、前記1つまたは複数の追加の温度パラメータを、対応する1つまたは複数の追加の作動限界値と比較するステップと、前記計算装置(30)を使用して、a)前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したこと、ならびにb)前記1つまたは複数の追加の温度パラメータが前記対応する1つまたは複数の追加の作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップとをさらに含む、請求項8記載のコンピュータプログラム。
【請求項1】
ターボ機械(15)の温度を制御する方法であって、
計算装置(30)を使用して、作動中の前記ターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップ(S1)と、
前記計算装置(30)を使用して、前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータを、前記ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するステップ(S2)と、
ユーザ(50)に対して、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップ(S3)と
を含む方法。
【請求項2】
受け取る前記ステップが、前記計算装置(30)と通信する外部コンピュータシステムから前記Texh、Tfire、およびTriseパラメータを受け取るステップを含む、請求項1記載の方法。
【請求項3】
処置を生成する前記ステップが、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して前記ターボ機械(15)のアラームまたはトリップを生じるステップを含む、請求項1記載の方法。
【請求項4】
ターボ機械(15)用の温度制御システム(40)であって、
作動中の前記ターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取る受け取り部(41)と、
前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータを、前記ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するコンパレータ(42)と、
前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して処置を生成する処置生成部(43)と
を備える
少なくとも1つの装置
を具備する温度制御システム(40)。
【請求項5】
前記受け取り部(41)が、前記計算装置(30)と通信する外部コンピュータシステムから前記Texh、Tfire、およびTrise作動限界値をさらに受け取る、請求項4記載の温度制御システム(40)。
【請求項6】
前記コンパレータ(42)が、前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータがその対応するTexh、Tfire、およびTrise作動限界値を超過したか否かを判定する判定部(47)を備える、請求項4記載の温度制御システム(40)。
【請求項7】
前記処置生成部(43)が、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して前記ターボ機械(15)のアラームまたはトリップを生成する、請求項4記載の温度制御システム(40)。
【請求項8】
実行されると、コンピュータシステムがターボ機械(15)の温度制御方法を実施できるようにする、少なくとも1つのコンピュータ可読媒体内で具体化されたプログラムコードを備えるコンピュータプログラムであって、前記方法が、
計算装置(30)を使用して、作動中の前記ターボ機械(15)の排気温度(Texh)パラメータ、燃焼温度(Tfire)パラメータ、および燃焼器温度上昇(Trise)パラメータを受け取るステップ(S1)と、
前記計算装置(30)を使用して、前記Texhパラメータ、前記Tfireパラメータ、および前記Triseパラメータを、前記ターボ機械(15)の対応するTexh、Tfire、およびTrise作動限界値と比較するステップ(S2)と、
ユーザ(50)に対して、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップ(S3)と
を含むコンピュータプログラム。
【請求項9】
処置を生成する前記ステップが、前記計算装置(30)を使用して、前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したことの少なくとも1つに応答して前記ターボ機械(15)のアラームまたはトリップを生成するステップを含む、請求項8記載のコンピュータプログラム。
【請求項10】
作動中の前記ターボ機械(15)の1つまたは複数の追加の温度パラメータを受け取るステップと、前記1つまたは複数の追加の温度パラメータを、対応する1つまたは複数の追加の作動限界値と比較するステップと、前記計算装置(30)を使用して、a)前記Texhパラメータが前記Texh作動限界値を超過したこと、前記Tfireパラメータが前記Tfire作動限界値を超過したこと、および前記Triseパラメータが前記Trise作動限界値を超過したこと、ならびにb)前記1つまたは複数の追加の温度パラメータが前記対応する1つまたは複数の追加の作動限界値を超過したことの少なくとも1つに応答して処置を生成するステップとをさらに含む、請求項8記載のコンピュータプログラム。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】

【図7】

【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−67748(P2012−67748A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−201243(P2011−201243)
【出願日】平成23年9月15日(2011.9.15)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2011−201243(P2011−201243)
【出願日】平成23年9月15日(2011.9.15)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]