
ターボ機械
【課題】ターボ機械での定格負荷運転時の流体性能の低下を防止すると共に、部分回転速度運転時での静翼の後流に起因する動翼への振動応力を低減する。
【解決手段】ターボ機械は、複数の径方向に伸びた動翼をその外周に有するロータと、前記ロータを、その内部に回転自由に保持すると共に、流体を当該ロータの動翼に導くための流路を形成するケーシングと、前記ケーシングに形成された前記流路内において、その円周方向に分布して複数配置され、かつ、部分回転速度運転時にはその取付角が変更可能な可変静翼を供えており、前記可変静翼は、前記ケーシングの円周方向において一様に分布しており、かつ、部分回転速度運転時における取付角の変更量が円周方向に非一様である。
【解決手段】ターボ機械は、複数の径方向に伸びた動翼をその外周に有するロータと、前記ロータを、その内部に回転自由に保持すると共に、流体を当該ロータの動翼に導くための流路を形成するケーシングと、前記ケーシングに形成された前記流路内において、その円周方向に分布して複数配置され、かつ、部分回転速度運転時にはその取付角が変更可能な可変静翼を供えており、前記可変静翼は、前記ケーシングの円周方向において一様に分布しており、かつ、部分回転速度運転時における取付角の変更量が円周方向に非一様である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、圧縮機やタービンなどにおいて利用されるターボ機械に係り、特に、部分回転速度運転時における可変静翼後流の変動流体力による動翼の共振破壊防止に好適な構造のターボ機械に関する。
【背景技術】
【0002】
一般に、ターボ機械は、回転する動翼を有するロータと、当該ロータを回転自由に保持し、もって、その間に流体の流路を形成する、所謂、ケーシング7とにより構成されている。また、例えば、圧縮機における静圧回復やタービンにおける流れの加速などを目的として、ケーシングの流路内において、その円周方向に一定間隔で静翼が配置される構造が採用されることがある。更に、部分回転速度運転時や部分負荷運転時においては、ターボ機械の出力特性や流路特性などが不平衡となるため、ターボ機械の出力特性を調整することを目的として、その運転時に、上記静翼の取付角度を変更とした、所謂、可変静翼を採用するものも既に知られている。
【0003】
なお、かかる可変静翼の構造としては、例えば、以下の特許文献1、特に、その図4に開示されており、この従来の可変静翼の構造では、駆動リングを回転させることにより、取付角変更アームを介して駆動リングに結合された当該可変静翼の取付角を変更することが可能となっている。
【0004】
ところで、一般に、静翼の下流側では、当該静翼が存在する部分と存在しない部分とでは、その流れの特性が異なり、そして、上流側に当該静翼が存在する部分の流れを「後流」と呼ぶ。この静翼の下流側に配置された回転する動翼は、「後流」を繰り返し通過することから、当該動翼の回転周波数と静翼枚数との積で表される周波数の流体加振力によって加振される。そして、この加振周波数と動翼の固有振動数が一致した場合、所謂、共振により動翼に過大な変動応力が発生し、そのため、動翼が疲労破壊してしまう可能性がある。従来では、かかる動翼の疲労破壊を防止するために、定格回転速度における加振周波数と動翼の固有振動数を離調させる、所謂、共振回避設計が行われている。しかしながら、当該加振周波数はロータの回転速度に比例して変化するため、部分回転速度運転時における共振を全て回避することは困難である。
【0005】
そこで、かかる共振時には、一定周期の流体加振力を受けることによって振動応力が増大してしまうことから、静翼の円周方向ピッチを非一様(不均一)とすることにより流体加振力の周期を分散させ、もって、動翼の共振応力低減する構造が、以下の特許文献2の図3に開示されている。
【0006】
【特許文献1】特開2003−13748号公報
【特許文献2】特開2001−214705号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記の従来技術によれば、例えば、円周方向に一定間隔で静翼を配置すると、上述したように、部分回転速度運転時における静翼の「後流」による流体加振力との共振により、動翼に過大な振動応力が発生する可能性がある。これに対し、上述したように、静翼の円周方向ピッチを非一様(不均一)にすることによれば、共振時の動翼振動応力を低減することはできるが、しかしながら、定格負荷運転時の流体性能が低下する可能性がある。
【0008】
そこで、本発明は、上述した従来技術における問題点に鑑みてなされたものであり、その目的は、部分回転速度運転時の可変静翼後流に起因する流体加振力との共振による動翼の振動応力を低減する共に、定格負荷運転時の流体性能低下をも防止すること可能な構造を備えてターボ機械を提供することにある。
【課題を解決するための手段】
【0009】
上記の目的を達成するため、本発明では、まず、複数の径方向に伸びた動翼をその外周に有するロータと、前記ロータを、その内部に回転自由に保持すると共に、流体を当該ロータの動翼に導くための流路を形成するケーシングと、前記ケーシングに形成された前記流路内において、その円周方向に分布して複数配置され、かつ、部分回転速度運転時にはその取付角が変更可能な可変静翼を有するターボ機械において、前記可変静翼は、前記ケーシングの円周方向において一様に分布しており、かつ、部分回転速度運転時における取付角の変更量が円周方向に非一様であるターボ機械が提供される。
【0010】
また、本発明によれば、前記に記載したターボ機械において、前記可変静翼の取付角の変更量が、複数の隣接する可変静翼を対として、それぞれ、異なっていることが好ましく、更には、前記可変静翼の取付角の変更量が、2枚の隣接する可変静翼を対として、それぞれ、異なっていることが好ましい。また、本発明では、前記可変静翼の取付角の変更量が、正弦波状に変化していることが、又は、ランダムに変化していることが好ましい。
【0011】
加えて、本発明では、前記に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定したピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する複数の駆動ラックとを有しており、もって、前記複数の駆動ラックは、それぞれ、異なる前記可変静翼の取付角を制御することが好ましく、又は、前記可変静翼は、更に、当該可変静翼に固定した前記ピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する駆動ラックとを有しており、もって、当該駆動ラックはそれぞれ異なる前記可変静翼の取付角を制御することが好ましい。更には、前記に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定した取付角制御アームと、当該取付角制御アームを円周方向に拘束し、かつ、円周方向に揺動することにより前記可変静翼の取付角を制御する駆動リングを有しており、さらに、前記取付角制御アームにおける前記可変静翼側固定点と前記駆動リング側拘束点との間の距離が円周方向の各静翼に対して非一様であることが好ましい。
【発明の効果】
【0012】
以上に述べた本発明によれば、ターボ機械において、可変静翼の取付角の変更量が円周方向に非一様であることにより、可変静翼の取付角変更時(部分回転速度運転時)において、可変静翼の取付角が非一様となり、下流側の動翼部において静翼後流の円周方向ピッチが非一様となるため、動翼に作用する流体加振力の周期を分散することから、動翼の共振応力を低減することができる。他方、定格負荷運転時には、可変静翼の取付角を一様な状態に戻すことができるため、可変静翼の取付角が非一様になることによる定格負荷運転時の流体性能低下を防止することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明を実施するための最良の形態について、実施例1及び2として、添付の図面を参照しながら説明する。
【実施例1】
【0014】
まず、本発明の実施例1になるターボ機械1の内部構造を、その縦断面により、添付の図1に示す。
【0015】
図にも示すように、本実施例1のターボ機械1は、その途中に径方向に伸びた動翼3を複数有する棒状のロータ4と、当該ロータ4をその両端に設けた軸受5を介して内部に回転自由に保持し、かつ、その一部、特に、その外周(前記ロータ4の動翼3の部分)に流体(図中の矢印を参照)を流すための円筒状の流路6を形成したケーシング7とから構成されている。そして、当該ケーシング7の流路6の内においては、上記ロータ4の動翼3の上流において、複数の可変静翼8が円周方向に一様(均等、一定間隔)に分布して配置されており、かつ、各可変静翼8は、その運転時において、その取付角を自由に変更することが出来るようになっている。
【0016】
即ち、各可変静翼8の一端から伸びた取付ロッド9が設けられており、当該取付ロッド9を介して、ケーシング7に対して揺動自由に取り付けられている。なお、図中における符号10a、11、12、13は、以下にもその詳細を述べるが、上記可変静翼8の取付角を制御するための機構である、可変静翼取付角制御機構を構成する要素を示している。
【0017】
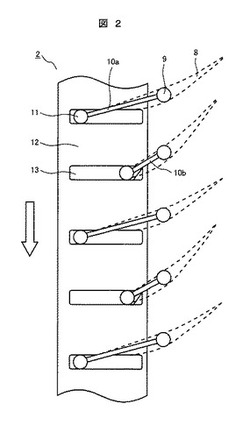
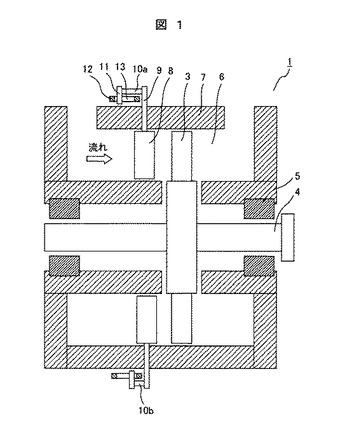
続いて、上記図1にその全体構成を示した本実施例1になるターボ機械1における上記可変静翼取付角制御機構2の外観を、添付の図2に示す。なお、この図2は、上記ターボ機械1の外周面において、特に、上記可変静翼8が取り付けられた近傍の一部を、湾曲面から平面に展開して示した図である。
【0018】
この図2にも示すように、各可変静翼8の一端から伸びた取付ロッド9の先端には、取付角制御アーム10aの一端が固定され、更に、当該取付角制御アーム10aの他端には、結合ピン11が固定されている。そして、当該結合ピン11を、上記ターボ機械1の外周面に沿って移動可能に設けられた(図の矢印を参照)駆動リング12に形成された結合スリット13内に挿入することにより、当該ピン11と駆動リング12とが、円周方向に、一体となって揺動可能になっている。
【0019】
即ち、上述した可変静翼取付角制御機構2の構成によれば、駆動リング12を円周方向に移動させることにより(図の矢印を参照)、結合ピン11の上記取付ロッド9に対する位置(角度)を変更し、もって、結合ピン11がその一端に固定された可変静翼8の取付角が変化するようになっている(図中の破線を参照)。
【0020】
なお、この図2に示した例では、可変静翼8の一枚おきに長い取付角制御アーム10aと短い取付角制御アーム10bとが用いられている。これによれば、取付角制御アーム10a、10bの可変静翼8側における固定点(即ち、取付ロッド9の位置)と、その駆動リング12側における拘束点(即ち、結合ピン11の位置であり、駆動リング12に形成された結合スリット13内の位置)との間の距離が非一様(不均一:但し、この場合には、隣接する可変静翼の一対毎に、一枚おきに異なる)となり、駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量は、長い取付角制御アーム10aを用いた可変静翼8では小さく、他方、短い取付角制御アーム10bを用いた可変静翼8では大きくなる。即ち、この図では、駆動リング12を移動(揺動)させたとき、可変静翼8の取付角が可変静翼8の一枚おきに異なるものとなることがわかる。
【0021】
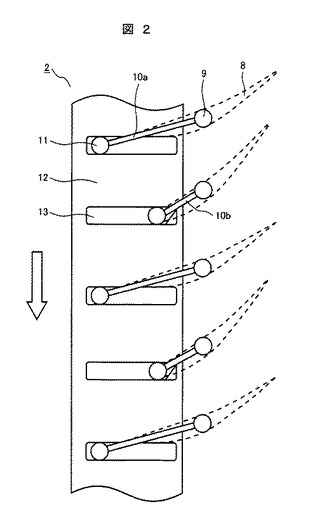
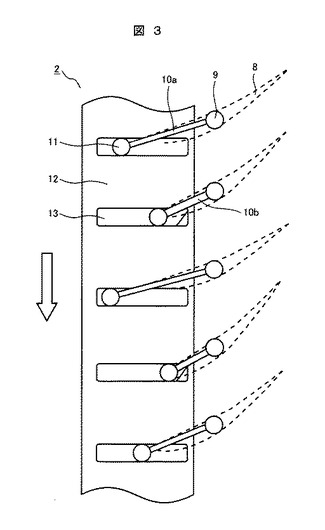
更に、添付の図3には、上記ターボ機械1における可変静翼取付角制御機構2の他の例を示す。この例では、可変静翼8の一枚おきに、それぞれ、その長さが異なる(即ち、ランダムな)取付角制御アーム10a、10b…が用いられている。即ち、これによれば、駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量を、それぞれ、一枚毎に異なるようにすることが出来る。又は、ここでは図示しないが、上述した取付角制御アーム10a、10b…の長さを、例えば、正弦波状など、所望のパターンにより設定することも可能である。なお、その場合には、駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量を、正弦波状など、所望のパターンにすることが可能となる。
【0022】
以上にその詳細を説明した可変静翼取付角制御機構2を備えたターボ機械1では、その部分回転速度運転時や部分負荷運転時においては、駆動リング12を円周方向に移動(揺動)させ、もって、上記ロータ4の動翼3の上流に位置する可変静翼8の取付角を変更するが、その際、上述した可変静翼取付角制御機構2によれば、ケーシング7の流路6の内において配置された複数の可変静翼8は、その円周方向に一様(均等)に分布しているが、しかしながら、当該可変静翼8の取付角の変更量が円周方向に非一様(不均一)であることから、その下流側に位置するロータ4の動翼3においては、当該静翼8により生じる「後流」の円周方向ピッチが非一様(不均一)となるため、当該動翼3に作用する流体加振力の周期を分散することができ、もって、動翼の共振応力を低減することが可能となる。
【0023】
他方、定格負荷運転時においては、ケーシング7の流路6の内においてその円周方向に一様(均等)に分布して配置された複数の可変静翼8を、その取付角が一様な状態に戻すことができることから、当該静翼8による流体性能の低下を防止することが出来る。即ち、部分回転速度運転時の可変静翼後流に起因する流体加振力との共振による動翼の振動応力を低減する共に、定格負荷運転時の流体性能低下をも防止することが可能となる。
【0024】
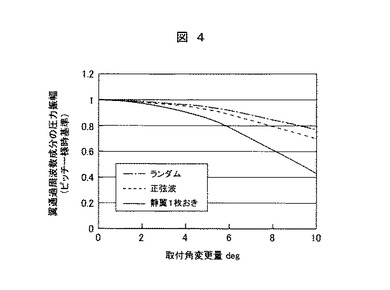
ここで、添付の図4のグラフは、上述した可変静翼取付角制御機構2を備えたターボ機械1における、特に、部分回転速度運転時や部分負荷運転時における効果を確認するため、取付角制御アーム10a、10b…の長さを、「ランダム(図3を参照)」、「正弦波」、「静翼1枚おき(図2を参照)」に設定した場合における、上流側可変静翼8を通過して動翼3に作用する周波数成分の圧力振幅「翼通過周波数成分の圧力振幅」(但し、ピッチ(静翼8の単位変化量)が一様の場合を基準とする)の変化(縦軸)を示している。なお、横軸には、上記駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量「取付角変更量」が示されている。
【0025】
図4のグラフからも明らかなように、ピッチ誤差(静翼8の単位変化のパターン)を円周方向に「ランダム(図3を参照)」に分布させた結果、「正弦波状」に分布させた結果、及び、「静翼1枚おき(図2を参照)」に変化させた結果を示している。いずれのピッチ誤差分布においても、その「取付角変更量」(最大ピッチ誤差)を大きくすると、流体加振力を低減できることがわかる。また、特に、互いに隣接する一対の静翼8において「静翼一枚おき」にそのピッチ誤差を変化させるパターンによる流体加振力低減効果が、最も高いことがわかる。
【0026】
以上のように、本実施例1になるターボ機械1によれば、可変静翼に固定した取付角制御アームと駆動リングとを用いて可変静翼の取付角を制御し、かつ、取付角制御アームにおける可変静翼側固定点と駆動リング側拘束点との間の距離を円周方向の各可変静翼に対して非一様(不均一)となるようにしたことにより、各可変静翼の取付角の変更量を任意に設定できることから、上述した効果が、より確実に得られることとなる。
【実施例2】
【0027】
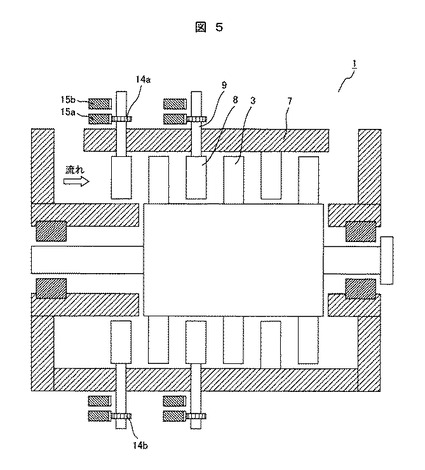
次に、添付の図5には、本発明のターボ機械1の他の例である、実施例2をその断面により示す。本実施例2では、可変静翼8の取付ロッド9には、上述した取付角制御アーム10a、10b…に代えて、ピニオンギア14を固定し、更に、当該ピニオンギア14と対向する面にギアを形成し、かつ、当該ピニオンギア14とかみ合いながら円周方向に揺動(移動)することにより、上記可変静翼8の各々の取付角を制御するための複数(本例では、2本)の駆動ラック15a、15bが設けられている。
【0028】
そして、図の上部に示すピニオンギア14aは、内周側の駆動ラック15aと、そして、下部に示すピニオンギア14bは、外周側の駆動ラック15bと、それぞれ、かみ合っている。かかる構成によれば、2本の駆動ラック15の揺動(移動)量が異なるように制御することにより、各可変静翼8(但し、隣接する一対の静翼)の取付角の変更量を、上記2本の駆動ラック15毎に異なるよう制御することが出来る。駆動ラック15の揺動制御方法としては、各駆動ラック15に対し、独立のアクチュエータを取り付けることにより、個別に制御しても良く、あるいは、例えば、ここでは図示しないリンク機構などを用いることにより、個々の駆動ラック15の揺動量を変更しても良い。
【0029】
また、図示のように、上述したピニオンギア14a、14bと複数(本例では、2本)の駆動ラック15a、15bを、上記ケーシング7の軸方向(図の横方向)に複数設けることによれば、径方向に複数伸びた動翼3を複数段有するロータ4に対しても、各段の動翼3に対して、その取付角の変更量が非一様(不均一)な静翼8を、比較的容易に、設けることが出来る。また、上述した駆動ラック15a、15bを2本に限らず、更に多くの駆動ラックを設けることによれば、隣接する一対の静翼の取付角だけに限られず、より多くの数の動翼3の取付角の変更量を、個別に制御することが可能となることは、当業者であれば明らかであろう。
【0030】
このように、本発明の実施例2になるターボ機械1では、可変静翼8に固定されたピニオンギアピニオンギア14a、14bと、これらにかみ合う複数の駆動ラック15a、15bが、それぞれ、異なる可変静翼8(但し、隣接する一対の静翼)の取付角を制御し、もって、取付角の変更量を駆動ラック毎に異ならせることによれば、上記の実施例1と同様に、可変静翼8の取付角を非一様に制御できるため、上記と同様の効果が得られる。
【実施例3】
【0031】
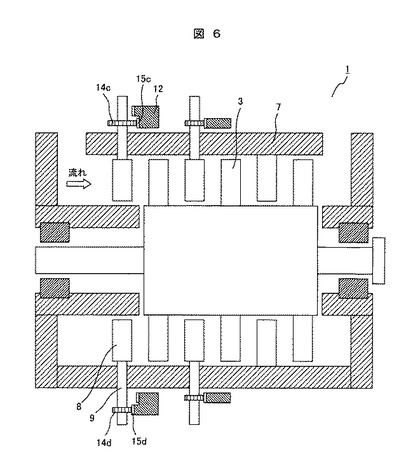
更に、添付の図6には、本発明のターボ機械1の他の例である、実施例3の断面を示す。図からも明らかなように、本実施例3においては、最上流側(図の左側)の可変静翼8では、1本の駆動リング12中には、2本の駆動ラック15c、15dが設けられており、それ故、駆動リング12の回転に伴うこれら2本のラック15c、15dの揺動角は、同一となっている。なお、より具体的には、図の可変静翼8において、その上方の可変静翼8には、そのピッチ円直径の大きいピニオンギア14cが、他方、その下部の可変静翼8には、そのピッチ円直径の小さいピニオンギア14dが、それぞれ、固定されている。そのため、上記駆動リング12の回転に伴う駆動ラック15c、15dの揺動時において、複数の可変静翼8の取付角の変化量が異なることとなる。なお、この実施例3では、駆動リング12が1本であることから、駆動ラック15の揺動制御機構が単純化できるという効果がある。また、上記のように、複数の駆動ラックの揺動角を共通とし、ピニオンギアのピッチ円直径をかみ合う駆動ラック毎に変更したことにより、簡易な構造で上記と同様の効果が得られる。
【0032】
なお、以上には、本発明を実施するための最良の形態として、上記の実施例1〜3について述べたが、本発明では、これらに限定されることなく、例えば、動翼3と静翼8との組で表される段の数は、上記図1のように1段であっても、又は、上記図5や図6に示すように、複数段であっても良い。
【0033】
また、上記の図5に示すように、可変静翼8の全てに、本発明の構造を適用しても良く、又は、上記の図5にも示すように、動翼の共振が特に問題となる一部の段の可変静翼8のみに、本発明の構造を適用して良い。なお、一部の段の可変静翼8に本発明の構造を適用する場合は、当該適用する段の位置は任意である。また、上述した取付角の変更量の分布パターンは、上記図2にも示すように、隣接する一対の静翼8の1本おきとしても良く、又は、上記図3にも示すように、その他の任意の分布パターンとしても良い。加えて、上記の図5では2本の駆動リングを、また、上記の図6では2種類のピニオンギアを用いたが、これらは3又はそれ以上の種類のピニオンギアを用いても良い。
【図面の簡単な説明】
【0034】
【図1】本発明の実施例1になるターボ機械の内部構成を示す断面図である。
【図2】上記ターボ機械における可変静翼取付角制御機構の要部を示す平面図である。
【図3】上記ターボ機械における変形例になる可変静翼取付角制御機構の要部を示す平面図である。
【図4】上記ターボ機械における部分回転速度運転時又は部分負荷運転時における効果を確認するためのグラフを示す図である。
【図5】本発明の実施例2になるターボ機械の内部構成を示す断面図である。
【図6】本発明の実施例2になるターボ機械の内部構成を示す断面図である。
【符号の説明】
【0035】
1…ターボ機械、2…可変静翼取付角制御機構、3…動翼、4…ロータ、5…軸受、6…流路、7…ケーシング7、8…可変静翼、9…取付ロッド、10a、10b…取付角制御アーム、11…結合ピン、12…駆動リング、13…結合スリット、14a、15b…ピニオンギア、15a、15b…駆動ラック。
【技術分野】
【0001】
本発明は、例えば、圧縮機やタービンなどにおいて利用されるターボ機械に係り、特に、部分回転速度運転時における可変静翼後流の変動流体力による動翼の共振破壊防止に好適な構造のターボ機械に関する。
【背景技術】
【0002】
一般に、ターボ機械は、回転する動翼を有するロータと、当該ロータを回転自由に保持し、もって、その間に流体の流路を形成する、所謂、ケーシング7とにより構成されている。また、例えば、圧縮機における静圧回復やタービンにおける流れの加速などを目的として、ケーシングの流路内において、その円周方向に一定間隔で静翼が配置される構造が採用されることがある。更に、部分回転速度運転時や部分負荷運転時においては、ターボ機械の出力特性や流路特性などが不平衡となるため、ターボ機械の出力特性を調整することを目的として、その運転時に、上記静翼の取付角度を変更とした、所謂、可変静翼を採用するものも既に知られている。
【0003】
なお、かかる可変静翼の構造としては、例えば、以下の特許文献1、特に、その図4に開示されており、この従来の可変静翼の構造では、駆動リングを回転させることにより、取付角変更アームを介して駆動リングに結合された当該可変静翼の取付角を変更することが可能となっている。
【0004】
ところで、一般に、静翼の下流側では、当該静翼が存在する部分と存在しない部分とでは、その流れの特性が異なり、そして、上流側に当該静翼が存在する部分の流れを「後流」と呼ぶ。この静翼の下流側に配置された回転する動翼は、「後流」を繰り返し通過することから、当該動翼の回転周波数と静翼枚数との積で表される周波数の流体加振力によって加振される。そして、この加振周波数と動翼の固有振動数が一致した場合、所謂、共振により動翼に過大な変動応力が発生し、そのため、動翼が疲労破壊してしまう可能性がある。従来では、かかる動翼の疲労破壊を防止するために、定格回転速度における加振周波数と動翼の固有振動数を離調させる、所謂、共振回避設計が行われている。しかしながら、当該加振周波数はロータの回転速度に比例して変化するため、部分回転速度運転時における共振を全て回避することは困難である。
【0005】
そこで、かかる共振時には、一定周期の流体加振力を受けることによって振動応力が増大してしまうことから、静翼の円周方向ピッチを非一様(不均一)とすることにより流体加振力の周期を分散させ、もって、動翼の共振応力低減する構造が、以下の特許文献2の図3に開示されている。
【0006】
【特許文献1】特開2003−13748号公報
【特許文献2】特開2001−214705号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記の従来技術によれば、例えば、円周方向に一定間隔で静翼を配置すると、上述したように、部分回転速度運転時における静翼の「後流」による流体加振力との共振により、動翼に過大な振動応力が発生する可能性がある。これに対し、上述したように、静翼の円周方向ピッチを非一様(不均一)にすることによれば、共振時の動翼振動応力を低減することはできるが、しかしながら、定格負荷運転時の流体性能が低下する可能性がある。
【0008】
そこで、本発明は、上述した従来技術における問題点に鑑みてなされたものであり、その目的は、部分回転速度運転時の可変静翼後流に起因する流体加振力との共振による動翼の振動応力を低減する共に、定格負荷運転時の流体性能低下をも防止すること可能な構造を備えてターボ機械を提供することにある。
【課題を解決するための手段】
【0009】
上記の目的を達成するため、本発明では、まず、複数の径方向に伸びた動翼をその外周に有するロータと、前記ロータを、その内部に回転自由に保持すると共に、流体を当該ロータの動翼に導くための流路を形成するケーシングと、前記ケーシングに形成された前記流路内において、その円周方向に分布して複数配置され、かつ、部分回転速度運転時にはその取付角が変更可能な可変静翼を有するターボ機械において、前記可変静翼は、前記ケーシングの円周方向において一様に分布しており、かつ、部分回転速度運転時における取付角の変更量が円周方向に非一様であるターボ機械が提供される。
【0010】
また、本発明によれば、前記に記載したターボ機械において、前記可変静翼の取付角の変更量が、複数の隣接する可変静翼を対として、それぞれ、異なっていることが好ましく、更には、前記可変静翼の取付角の変更量が、2枚の隣接する可変静翼を対として、それぞれ、異なっていることが好ましい。また、本発明では、前記可変静翼の取付角の変更量が、正弦波状に変化していることが、又は、ランダムに変化していることが好ましい。
【0011】
加えて、本発明では、前記に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定したピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する複数の駆動ラックとを有しており、もって、前記複数の駆動ラックは、それぞれ、異なる前記可変静翼の取付角を制御することが好ましく、又は、前記可変静翼は、更に、当該可変静翼に固定した前記ピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する駆動ラックとを有しており、もって、当該駆動ラックはそれぞれ異なる前記可変静翼の取付角を制御することが好ましい。更には、前記に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定した取付角制御アームと、当該取付角制御アームを円周方向に拘束し、かつ、円周方向に揺動することにより前記可変静翼の取付角を制御する駆動リングを有しており、さらに、前記取付角制御アームにおける前記可変静翼側固定点と前記駆動リング側拘束点との間の距離が円周方向の各静翼に対して非一様であることが好ましい。
【発明の効果】
【0012】
以上に述べた本発明によれば、ターボ機械において、可変静翼の取付角の変更量が円周方向に非一様であることにより、可変静翼の取付角変更時(部分回転速度運転時)において、可変静翼の取付角が非一様となり、下流側の動翼部において静翼後流の円周方向ピッチが非一様となるため、動翼に作用する流体加振力の周期を分散することから、動翼の共振応力を低減することができる。他方、定格負荷運転時には、可変静翼の取付角を一様な状態に戻すことができるため、可変静翼の取付角が非一様になることによる定格負荷運転時の流体性能低下を防止することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明を実施するための最良の形態について、実施例1及び2として、添付の図面を参照しながら説明する。
【実施例1】
【0014】
まず、本発明の実施例1になるターボ機械1の内部構造を、その縦断面により、添付の図1に示す。
【0015】
図にも示すように、本実施例1のターボ機械1は、その途中に径方向に伸びた動翼3を複数有する棒状のロータ4と、当該ロータ4をその両端に設けた軸受5を介して内部に回転自由に保持し、かつ、その一部、特に、その外周(前記ロータ4の動翼3の部分)に流体(図中の矢印を参照)を流すための円筒状の流路6を形成したケーシング7とから構成されている。そして、当該ケーシング7の流路6の内においては、上記ロータ4の動翼3の上流において、複数の可変静翼8が円周方向に一様(均等、一定間隔)に分布して配置されており、かつ、各可変静翼8は、その運転時において、その取付角を自由に変更することが出来るようになっている。
【0016】
即ち、各可変静翼8の一端から伸びた取付ロッド9が設けられており、当該取付ロッド9を介して、ケーシング7に対して揺動自由に取り付けられている。なお、図中における符号10a、11、12、13は、以下にもその詳細を述べるが、上記可変静翼8の取付角を制御するための機構である、可変静翼取付角制御機構を構成する要素を示している。
【0017】
続いて、上記図1にその全体構成を示した本実施例1になるターボ機械1における上記可変静翼取付角制御機構2の外観を、添付の図2に示す。なお、この図2は、上記ターボ機械1の外周面において、特に、上記可変静翼8が取り付けられた近傍の一部を、湾曲面から平面に展開して示した図である。
【0018】
この図2にも示すように、各可変静翼8の一端から伸びた取付ロッド9の先端には、取付角制御アーム10aの一端が固定され、更に、当該取付角制御アーム10aの他端には、結合ピン11が固定されている。そして、当該結合ピン11を、上記ターボ機械1の外周面に沿って移動可能に設けられた(図の矢印を参照)駆動リング12に形成された結合スリット13内に挿入することにより、当該ピン11と駆動リング12とが、円周方向に、一体となって揺動可能になっている。
【0019】
即ち、上述した可変静翼取付角制御機構2の構成によれば、駆動リング12を円周方向に移動させることにより(図の矢印を参照)、結合ピン11の上記取付ロッド9に対する位置(角度)を変更し、もって、結合ピン11がその一端に固定された可変静翼8の取付角が変化するようになっている(図中の破線を参照)。
【0020】
なお、この図2に示した例では、可変静翼8の一枚おきに長い取付角制御アーム10aと短い取付角制御アーム10bとが用いられている。これによれば、取付角制御アーム10a、10bの可変静翼8側における固定点(即ち、取付ロッド9の位置)と、その駆動リング12側における拘束点(即ち、結合ピン11の位置であり、駆動リング12に形成された結合スリット13内の位置)との間の距離が非一様(不均一:但し、この場合には、隣接する可変静翼の一対毎に、一枚おきに異なる)となり、駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量は、長い取付角制御アーム10aを用いた可変静翼8では小さく、他方、短い取付角制御アーム10bを用いた可変静翼8では大きくなる。即ち、この図では、駆動リング12を移動(揺動)させたとき、可変静翼8の取付角が可変静翼8の一枚おきに異なるものとなることがわかる。
【0021】
更に、添付の図3には、上記ターボ機械1における可変静翼取付角制御機構2の他の例を示す。この例では、可変静翼8の一枚おきに、それぞれ、その長さが異なる(即ち、ランダムな)取付角制御アーム10a、10b…が用いられている。即ち、これによれば、駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量を、それぞれ、一枚毎に異なるようにすることが出来る。又は、ここでは図示しないが、上述した取付角制御アーム10a、10b…の長さを、例えば、正弦波状など、所望のパターンにより設定することも可能である。なお、その場合には、駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量を、正弦波状など、所望のパターンにすることが可能となる。
【0022】
以上にその詳細を説明した可変静翼取付角制御機構2を備えたターボ機械1では、その部分回転速度運転時や部分負荷運転時においては、駆動リング12を円周方向に移動(揺動)させ、もって、上記ロータ4の動翼3の上流に位置する可変静翼8の取付角を変更するが、その際、上述した可変静翼取付角制御機構2によれば、ケーシング7の流路6の内において配置された複数の可変静翼8は、その円周方向に一様(均等)に分布しているが、しかしながら、当該可変静翼8の取付角の変更量が円周方向に非一様(不均一)であることから、その下流側に位置するロータ4の動翼3においては、当該静翼8により生じる「後流」の円周方向ピッチが非一様(不均一)となるため、当該動翼3に作用する流体加振力の周期を分散することができ、もって、動翼の共振応力を低減することが可能となる。
【0023】
他方、定格負荷運転時においては、ケーシング7の流路6の内においてその円周方向に一様(均等)に分布して配置された複数の可変静翼8を、その取付角が一様な状態に戻すことができることから、当該静翼8による流体性能の低下を防止することが出来る。即ち、部分回転速度運転時の可変静翼後流に起因する流体加振力との共振による動翼の振動応力を低減する共に、定格負荷運転時の流体性能低下をも防止することが可能となる。
【0024】
ここで、添付の図4のグラフは、上述した可変静翼取付角制御機構2を備えたターボ機械1における、特に、部分回転速度運転時や部分負荷運転時における効果を確認するため、取付角制御アーム10a、10b…の長さを、「ランダム(図3を参照)」、「正弦波」、「静翼1枚おき(図2を参照)」に設定した場合における、上流側可変静翼8を通過して動翼3に作用する周波数成分の圧力振幅「翼通過周波数成分の圧力振幅」(但し、ピッチ(静翼8の単位変化量)が一様の場合を基準とする)の変化(縦軸)を示している。なお、横軸には、上記駆動リング12を円周方向に移動(揺動)させたときの可変静翼8の取付角の変更量「取付角変更量」が示されている。
【0025】
図4のグラフからも明らかなように、ピッチ誤差(静翼8の単位変化のパターン)を円周方向に「ランダム(図3を参照)」に分布させた結果、「正弦波状」に分布させた結果、及び、「静翼1枚おき(図2を参照)」に変化させた結果を示している。いずれのピッチ誤差分布においても、その「取付角変更量」(最大ピッチ誤差)を大きくすると、流体加振力を低減できることがわかる。また、特に、互いに隣接する一対の静翼8において「静翼一枚おき」にそのピッチ誤差を変化させるパターンによる流体加振力低減効果が、最も高いことがわかる。
【0026】
以上のように、本実施例1になるターボ機械1によれば、可変静翼に固定した取付角制御アームと駆動リングとを用いて可変静翼の取付角を制御し、かつ、取付角制御アームにおける可変静翼側固定点と駆動リング側拘束点との間の距離を円周方向の各可変静翼に対して非一様(不均一)となるようにしたことにより、各可変静翼の取付角の変更量を任意に設定できることから、上述した効果が、より確実に得られることとなる。
【実施例2】
【0027】
次に、添付の図5には、本発明のターボ機械1の他の例である、実施例2をその断面により示す。本実施例2では、可変静翼8の取付ロッド9には、上述した取付角制御アーム10a、10b…に代えて、ピニオンギア14を固定し、更に、当該ピニオンギア14と対向する面にギアを形成し、かつ、当該ピニオンギア14とかみ合いながら円周方向に揺動(移動)することにより、上記可変静翼8の各々の取付角を制御するための複数(本例では、2本)の駆動ラック15a、15bが設けられている。
【0028】
そして、図の上部に示すピニオンギア14aは、内周側の駆動ラック15aと、そして、下部に示すピニオンギア14bは、外周側の駆動ラック15bと、それぞれ、かみ合っている。かかる構成によれば、2本の駆動ラック15の揺動(移動)量が異なるように制御することにより、各可変静翼8(但し、隣接する一対の静翼)の取付角の変更量を、上記2本の駆動ラック15毎に異なるよう制御することが出来る。駆動ラック15の揺動制御方法としては、各駆動ラック15に対し、独立のアクチュエータを取り付けることにより、個別に制御しても良く、あるいは、例えば、ここでは図示しないリンク機構などを用いることにより、個々の駆動ラック15の揺動量を変更しても良い。
【0029】
また、図示のように、上述したピニオンギア14a、14bと複数(本例では、2本)の駆動ラック15a、15bを、上記ケーシング7の軸方向(図の横方向)に複数設けることによれば、径方向に複数伸びた動翼3を複数段有するロータ4に対しても、各段の動翼3に対して、その取付角の変更量が非一様(不均一)な静翼8を、比較的容易に、設けることが出来る。また、上述した駆動ラック15a、15bを2本に限らず、更に多くの駆動ラックを設けることによれば、隣接する一対の静翼の取付角だけに限られず、より多くの数の動翼3の取付角の変更量を、個別に制御することが可能となることは、当業者であれば明らかであろう。
【0030】
このように、本発明の実施例2になるターボ機械1では、可変静翼8に固定されたピニオンギアピニオンギア14a、14bと、これらにかみ合う複数の駆動ラック15a、15bが、それぞれ、異なる可変静翼8(但し、隣接する一対の静翼)の取付角を制御し、もって、取付角の変更量を駆動ラック毎に異ならせることによれば、上記の実施例1と同様に、可変静翼8の取付角を非一様に制御できるため、上記と同様の効果が得られる。
【実施例3】
【0031】
更に、添付の図6には、本発明のターボ機械1の他の例である、実施例3の断面を示す。図からも明らかなように、本実施例3においては、最上流側(図の左側)の可変静翼8では、1本の駆動リング12中には、2本の駆動ラック15c、15dが設けられており、それ故、駆動リング12の回転に伴うこれら2本のラック15c、15dの揺動角は、同一となっている。なお、より具体的には、図の可変静翼8において、その上方の可変静翼8には、そのピッチ円直径の大きいピニオンギア14cが、他方、その下部の可変静翼8には、そのピッチ円直径の小さいピニオンギア14dが、それぞれ、固定されている。そのため、上記駆動リング12の回転に伴う駆動ラック15c、15dの揺動時において、複数の可変静翼8の取付角の変化量が異なることとなる。なお、この実施例3では、駆動リング12が1本であることから、駆動ラック15の揺動制御機構が単純化できるという効果がある。また、上記のように、複数の駆動ラックの揺動角を共通とし、ピニオンギアのピッチ円直径をかみ合う駆動ラック毎に変更したことにより、簡易な構造で上記と同様の効果が得られる。
【0032】
なお、以上には、本発明を実施するための最良の形態として、上記の実施例1〜3について述べたが、本発明では、これらに限定されることなく、例えば、動翼3と静翼8との組で表される段の数は、上記図1のように1段であっても、又は、上記図5や図6に示すように、複数段であっても良い。
【0033】
また、上記の図5に示すように、可変静翼8の全てに、本発明の構造を適用しても良く、又は、上記の図5にも示すように、動翼の共振が特に問題となる一部の段の可変静翼8のみに、本発明の構造を適用して良い。なお、一部の段の可変静翼8に本発明の構造を適用する場合は、当該適用する段の位置は任意である。また、上述した取付角の変更量の分布パターンは、上記図2にも示すように、隣接する一対の静翼8の1本おきとしても良く、又は、上記図3にも示すように、その他の任意の分布パターンとしても良い。加えて、上記の図5では2本の駆動リングを、また、上記の図6では2種類のピニオンギアを用いたが、これらは3又はそれ以上の種類のピニオンギアを用いても良い。
【図面の簡単な説明】
【0034】
【図1】本発明の実施例1になるターボ機械の内部構成を示す断面図である。
【図2】上記ターボ機械における可変静翼取付角制御機構の要部を示す平面図である。
【図3】上記ターボ機械における変形例になる可変静翼取付角制御機構の要部を示す平面図である。
【図4】上記ターボ機械における部分回転速度運転時又は部分負荷運転時における効果を確認するためのグラフを示す図である。
【図5】本発明の実施例2になるターボ機械の内部構成を示す断面図である。
【図6】本発明の実施例2になるターボ機械の内部構成を示す断面図である。
【符号の説明】
【0035】
1…ターボ機械、2…可変静翼取付角制御機構、3…動翼、4…ロータ、5…軸受、6…流路、7…ケーシング7、8…可変静翼、9…取付ロッド、10a、10b…取付角制御アーム、11…結合ピン、12…駆動リング、13…結合スリット、14a、15b…ピニオンギア、15a、15b…駆動ラック。
【特許請求の範囲】
【請求項1】
複数の径方向に伸びた動翼をその外周に有するロータと、
前記ロータを、その内部に回転自由に保持すると共に、流体を当該ロータの動翼に導くための流路を形成するケーシングと、
前記ケーシングに形成された前記流路内において、その円周方向に分布して複数配置され、かつ、部分回転速度運転時にはその取付角が変更可能な可変静翼を有するターボ機械において、
前記可変静翼は、前記ケーシングの円周方向において一様に分布しており、かつ、部分回転速度運転時における取付角の変更量が円周方向に非一様であることを特徴とするターボ機械。
【請求項2】
前記請求項1に記載したターボ機械において、前記可変静翼の取付角の変更量が、複数の隣接する可変静翼を対として、それぞれ、異なっていることを特徴とするターボ機械。
【請求項3】
前記請求項2に記載したターボ機械において、前記可変静翼の取付角の変更量が、2枚の隣接する可変静翼を対として、それぞれ、異なっていることを特徴とするターボ機械。
【請求項4】
前記請求項1に記載したターボ機械において、前記可変静翼の取付角の変更量が、正弦波状に変化していることを特徴とするターボ機械。
【請求項5】
前記請求項1に記載したターボ機械において、前記可変静翼の取付角の変更量が、ランダムに変化していることを特徴とするターボ機械。
【請求項6】
前記請求項2に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定したピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する複数の駆動ラックとを有しており、もって、前記複数の駆動ラックは、それぞれ、異なる前記可変静翼の取付角を制御することを特徴とするターボ機械。
【請求項7】
前記請求項2に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定した前記ピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する駆動ラックとを有しており、もって、当該駆動ラックはそれぞれ異なる前記可変静翼の取付角を制御することを特徴とするターボ機械。
【請求項8】
前記請求項1に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定した取付角制御アームと、当該取付角制御アームを円周方向に拘束し、かつ、円周方向に揺動することにより前記可変静翼の取付角を制御する駆動リングを有しており、さらに、前記取付角制御アームにおける前記可変静翼側固定点と前記駆動リング側拘束点との間の距離が円周方向の各静翼に対して非一様であることを特徴とするターボ機械。
【請求項1】
複数の径方向に伸びた動翼をその外周に有するロータと、
前記ロータを、その内部に回転自由に保持すると共に、流体を当該ロータの動翼に導くための流路を形成するケーシングと、
前記ケーシングに形成された前記流路内において、その円周方向に分布して複数配置され、かつ、部分回転速度運転時にはその取付角が変更可能な可変静翼を有するターボ機械において、
前記可変静翼は、前記ケーシングの円周方向において一様に分布しており、かつ、部分回転速度運転時における取付角の変更量が円周方向に非一様であることを特徴とするターボ機械。
【請求項2】
前記請求項1に記載したターボ機械において、前記可変静翼の取付角の変更量が、複数の隣接する可変静翼を対として、それぞれ、異なっていることを特徴とするターボ機械。
【請求項3】
前記請求項2に記載したターボ機械において、前記可変静翼の取付角の変更量が、2枚の隣接する可変静翼を対として、それぞれ、異なっていることを特徴とするターボ機械。
【請求項4】
前記請求項1に記載したターボ機械において、前記可変静翼の取付角の変更量が、正弦波状に変化していることを特徴とするターボ機械。
【請求項5】
前記請求項1に記載したターボ機械において、前記可変静翼の取付角の変更量が、ランダムに変化していることを特徴とするターボ機械。
【請求項6】
前記請求項2に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定したピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する複数の駆動ラックとを有しており、もって、前記複数の駆動ラックは、それぞれ、異なる前記可変静翼の取付角を制御することを特徴とするターボ機械。
【請求項7】
前記請求項2に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定した前記ピニオンギアと、当該ピニオンギアとかみ合いながら円周方向に揺動することにより前記可変静翼の取付角を制御する駆動ラックとを有しており、もって、当該駆動ラックはそれぞれ異なる前記可変静翼の取付角を制御することを特徴とするターボ機械。
【請求項8】
前記請求項1に記載したターボ機械において、前記可変静翼は、更に、当該可変静翼に固定した取付角制御アームと、当該取付角制御アームを円周方向に拘束し、かつ、円周方向に揺動することにより前記可変静翼の取付角を制御する駆動リングを有しており、さらに、前記取付角制御アームにおける前記可変静翼側固定点と前記駆動リング側拘束点との間の距離が円周方向の各静翼に対して非一様であることを特徴とするターボ機械。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−299528(P2009−299528A)
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願番号】特願2008−153016(P2008−153016)
【出願日】平成20年6月11日(2008.6.11)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願日】平成20年6月11日(2008.6.11)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]