
ターボ機械
【課題】回転側の部分と固定側の部分との間のクリアランスを種々の運転状態に合わせて最適化し、高められた効率を達成する。
【解決手段】固定側の構成部分と回転側の構成部分12との間に、摩擦接触を回避するためにクリアランスが設けられており、該クリアランスが、機械の休止状態では第1の値をとり、機械の定常運転では第2の値をとり、さらに該クリアランスが、休止状態と定常運転との間の過渡的な運転段階では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」;gt)を有する曲線に沿って変化するようになっており、過渡的な運転段階における前記極値を減少させるか、もしくは補償するための非線形の補償メカニズムを備えた自己調節装置20が設けられている。
【解決手段】固定側の構成部分と回転側の構成部分12との間に、摩擦接触を回避するためにクリアランスが設けられており、該クリアランスが、機械の休止状態では第1の値をとり、機械の定常運転では第2の値をとり、さらに該クリアランスが、休止状態と定常運転との間の過渡的な運転段階では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」;gt)を有する曲線に沿って変化するようになっており、過渡的な運転段階における前記極値を減少させるか、もしくは補償するための非線形の補償メカニズムを備えた自己調節装置20が設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、たとえばガスタービン、蒸気タービン、航空機推進装置、定置式の圧縮機またはターボチャージャのようなターボ機械の分野に関する。本発明は、高められた運転温度で作動するターボ機械であって、定位置の固定の構成部分(以下「固定側の構成部分」と呼ぶ)と、回転する構成部分(以下「回転側の構成部分」と呼ぶ)とが設けられており、固定側の構成部分と回転側の構成部分との間に、摩擦接触を回避するためにクリアランスが設けられており、該クリアランスが、機械の休止状態では第1の値をとり、機械の定常運転では第2の値をとり、さらに該クリアランスが、休止状態と定常運転との間の過渡的な運転段階では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」)を有する曲線に沿って変化するようになっている形式のターボ機械に関する。
【背景技術】
【0002】
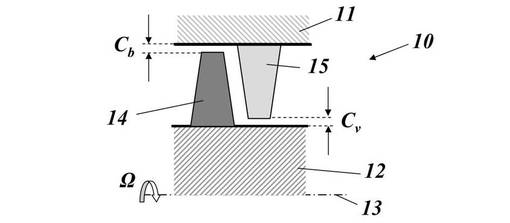
運転中にターボ機械の定位置に固定の部分、すなわち固定側の部分と、回転する部分、すなわち回転側の部分との間のクリアランス、特に半径方向のクリアランスを最小化することは、流れ損失を最小限に抑え、ひいてはこのような機械の効率を最大化するために重要となる。説明のために、図1には、圧縮機配置の形のターボ機械10が図示されている。このターボ機械10は、(軸線13を中心にして)回転するシャフト12に装着された動翼14と、ケーシング11に固定された静翼15とを備えている。動翼14の先端と、動翼先端に向かい合って位置するケーシング11との間の半径方向のクリアランスCbもしくは静翼15の先端と、静翼先端に向かい合って位置するシャフト12との間の半径方向のクリアランスCvを最小化することにより、流れ損失を減少させることができる。
【0003】
たとえば動翼14の翼先端とケーシング11との間の相対運動に基づき、半径方向のクリアランスをゼロに設定することは不可能である。運転中に両部分の間に接触が生じると、この接触により両部分の損傷またはそれどころか両部分の完全な破壊が生ぜしめられる恐れがある。
【0004】
原則的には、運転時の半径方向のクリアランス(いわゆる「ホット時クリアランス」)は、組立て時クリアランス(いわゆる「コールド時クリアランス」、低温の機械の休止状態)が規定される場合に、このような機械の構造において考慮されなければならない一連の要因により決定されると云える:
・ 個々の構成部分の製造誤差;
・ 組立て誤差;
・ 熱効果および遠心力に基づいた、運転時における翼の伸び;
・ 定常運転におけるシャフトおよびケーシングの変形(たとえば「楕円化変形」);
・ たとえば機械の起動時または遮断時のような過渡的な機械運転(機械の運転上の移行段階)時における全ての構成部分の、時間に関連した変形および相対運動。
【0005】
特に、過渡的な運転時における主コンポーネントの、時間に関連した変形および相対運動は、コールド時クリアランスを決定し、そしてその結果生ぜしめられるホット時クリアランスを決定するために重要となる。その目的は、定常運転中に生ぜしめられるホット時クリアランスが最小となるようにコールド時クリアランスを決定することである。機械の加熱時または冷却時における翼、ケーシング部分およびシャフトの機械的および熱的な変形における時定数が互いに異なることに基づき、最小のホット時クリアランスは必ずしも、最小クリアランスが望まれている高温の定常運転において出現するとは限らない。特に機械が、迅速な負荷交番をも受けていること、または先行した運転周期の主要コンポーネントがまだ高温である場合に機械が始動され得ることを考慮すると、生じ得る最も小さなクリアランス(いわゆる「ピンチポイント」)は一般に過渡的な運転段階において出現する。このような場合には、過渡的な運転時における固定側の部分と回転側の部分との間での硬い接触が回避される程度にコールド時クリアランスを大きく拡大させることが必要となる。その場合、このことは当然ながら、定常の条件下では、望まれたものよりも大きく形成されたホット時クリアランスを生ぜしめる。
【0006】
残留ホット時クリアランスが原因で生ぜしめられる流れ損失を最小限に抑えるための公知の手段は、たとえば動翼ブレードおよび静翼ブレードの先端(チップ)にシュラウドを導入することである。シュラウドとケーシングまたはロータとの間の環状ギャップを通る流れを最小限にまで減少させるために、しばしば、回転側の部分には周方向で1つまたは複数のリブが設けられ、固定側の部分の表面は平坦であるかまたは段付けされ、これにより全体的に1つのラビリンス状のシールが形成される。さらに、固定側の部分の表面には、いわゆる「ハニカム(蜂の巣状の材料)」を配置することができる。これにより、リブに、過渡的な運転状態中での切込みを可能にさせ、こうして硬い接触を回避することができる。この場合に得られる、回転側の部分と、切り込まれたハニカムとから成る構成は、段付けされたラビリンスシールに似ていて、ハニカムなしの構成に比べて流れ損失を減少させるために役立つ。ホット時クリアランスを最小化するための別の公知の手段は、固定側の部分にリーフシール(Blattdichtung)またはブラシシール(Buerstendichtung)を設けることにある。リーフシールまたはブラシシールは、運転上の移行段階におけるクリアランスの変化をある程度までは補償することができる。
【0007】
さらに、たとえば摩耗作用を持ったエレメントと、反対側に設けられたアブレイダブル被膜とから成る組合せを使用することもできる。これにより、たとえば構造的な部分の楕円化変形またはケーシング内でのシャフトのある程度の偏心性により生ぜしめられる恐れのある、全周にわたって生じるクリアランス変動の負の効果を弱めることができる。
【0008】
これまで説明した全ての解決手段が、運転時にジオメトリ(幾何学的形状)の何らかのアクティブな調整を行うことなしにホット時クリアランスの最小化を可能にする「純パッシブ」な性質のものであるのに対して、クリアランスを減少させるためのアクティブな手段も多数知られている。
【0009】
すなわち、たとえば機械がその定常の運転状態に達した場合にロータ全体を軸方向に移動させるシステムが知られている。このことは、円錐状の流れ通路との協働において、高温のタービンにおける半径方向のクリアランスをアクティブに最小化することを可能にする。この場合、上で説明したパッシブな手段との組合せも原則的に可能である。しかし、ロータ全体が運動させられなければならないので、圧縮機側における半径方向のクリアランスの拡大が生ぜしめられる。したがって、このような手段は、タービンにおける損失の低減が、コンプレッサ側における付加的な損失を上回る場合にのみ有効となる。
【0010】
シャフトを移動させる代わりに、別の解決手段では、各タービン段において翼の半径方向の熱膨張を制御するか、または予め規定された限界温度が超過されると熱シールドの付加的な半径方向運動を可能にするばねシステムを使用することが提案されている。
【0011】
クリアランスを線形に、つまり一次に調節するための調節手段を使用すること、あるいはまたばね弾性的にフレキシブルな支承手段を使用することが知られている。ばね弾性的にフレキシブルな支承手段は、たとえば欧州特許出願公開第1467066号明細書に記載されている。しかし、これらの技術的な解決手段を用いても、機械の運転上の移行段階におけるクリアランスの極値を補償することは不可能である。
【0012】
米国特許出願公開第2009/0226327号明細書には、ロータディスク内に組み込まれている形状記憶合金から製造された絞りスリーブが記載されている。局所的な温度に関連して、この絞りスリーブはタービン翼内への冷却媒体流の量を制御する。冷却媒体流が減少されると、これにより翼は熱膨張するので、こうして翼先端と、これに向かい合って位置する固定側の構成部分との間の半径方向のギャップが小さくされる。冷却媒体流が増大されると、これにより、翼長さが短くなり、こうして半径方向のギャップが大きくされる。
【0013】
英国特許第2354290号明細書には、ガスタービン翼の冷却通路内に組み込まれた形状記憶合金から製造された弁が記載されている。この弁は構成部分の温度に関連して冷却媒体の消費量を調節する。動翼および静翼のための半径方向のクリアランスの制御については、上記英国特許明細書には何ら記載されていない。
【0014】
米国特許第7686569号明細書には、翼リングの軸方向運動のためのシステムが記載されている。翼リングの軸方向運動は、翼リングに加えられる圧力差、結合部の熱膨張または熱収縮またはピストンにより生ぜしめられる。同じく、形状記憶合金により、所要の運動を生ぜしめることができる。
【0015】
基本的には、回転側の構成部分と固定側の構成部分との間のクリアランスのコントロールのための種々異なるパッシブ型、セミアクティブ型またはアクティブ型のシステムならびにこれらのシステムから成る組合せを考えることができる。回転側のコンポーネントと固定側のコンポーネントとの間の相対的な間隔を表すクリアランスCbまたはCv(図1)は、過渡的な運転状態の間、これらのコンポーネントの、時間に関連した互いに異なる熱的および機械的な変形に基づいて変化する。実際の時間的な経過は、コンポーネントの体積、高温または低温の媒体との接触および使用された合金の熱的な特性のような多数の要因に関連している。
【0016】
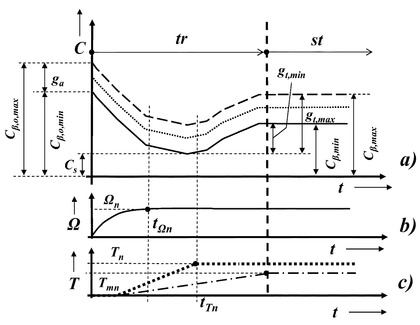
これらの時間的に互いに異なる変形に基づき、図2の(a)に示したように、高温時のホット時クリアランスCb(動翼)またはCv(静翼)は安全クリアランスCsの他に、過渡的な成分gt,minを有しなければならない。この過渡的な成分は、低温の組み立てられた状態におけるクリアランスCβ,o,minおよびCβ,o,maxを規定する際に一緒に考慮されなければならない。
【0017】
図2の部分図(a)には、定常の運転段階(st)および過渡的な運転段階(tr)に関して、回転側の高温の部分と固定側の高温の部分との間のクリアランスの変化を時間との関係で示す一例が示されている。この場合、既に述べたように、Csは安全クリアランスを表し、gaは構成部分の製造誤差および組立て誤差に基づいた誤差幅を表し、gt,minおよびgt,maxは、定常の状態におけるクリアランスと、最小クリアランスとの間の最小差および最大差を表し、Cβ,minおよびCβ,maxは公称(「高温」)の運転条件のための最小クリアランスおよび最大クリアランスを表し、Cβ,o,minおよびCβ,o,maxは休止状態(「低温」の運転条件)における相応する最小クリアランスおよび最大クリアランスを表す(添え字βは「b」もしくは動翼、または「v」もしくは静翼を表す、図1参照)。
【0018】
図2の(b)および(c)には、シャフト12の回転速度Ω、駆動媒体(熱ガス)の温度Tおよび金属温度Tmnの、生じ得る変化を時間との関係で示す線図が示されており、この場合、ΩnおよびTnは相応して、公称回転速度および機械における公称熱ガス温度を意味する。金属温度Tmnは、機械の定常運転時におけるシャフトおよび/または別の機械的なコンポーネントの公称温度を表す。tΩnおよびtTnは、定常値ΩnおよびTnが達成される時点である。
【0019】
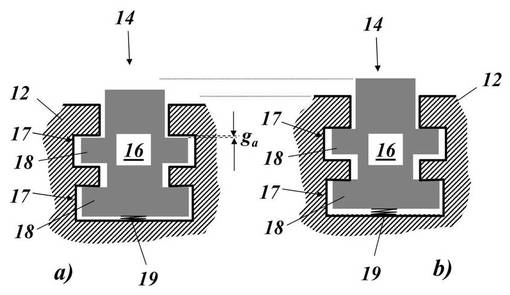
図3には、ベースもしくは根元16によって、ロータ(シャフト12)に設けられた相応する収容部内に取り付けられている、回転側の構成部分(図示の例では動翼14)が、機械の休止状態(図3のa)における横断面図と、公称の定常運転条件(図3のb)下での横断面図とで示されている。図示の根元16はそれぞれ任意の根元ジオメトリ(根元幾何学的形状)、たとえばクリスマスツリー形根元、ダブテイル形根元またはハンマヘッド形根元であってよい。
【0020】
遠心力は根元16に設けられた複数のフィンガ18の1つまたは幾つかをロータ12と接触させる(図3のb)。低い回転速度では、ばねエレメント19により、根元16が収容部内で、ゆっくりとした回転速度の際にがたつくことが阻止される。公称回転速度において、かつ機械の全てのコンポーネントの熱平衡が達成された後に、図1に示したクリアランスCbまたはCvが達成される。gaはこの場合、やはり製作誤差および組立て誤差からの誤差幅を表し、機械の休止状態におけるフィンガ18とロータ収容部との間に例示的に示されている。
【0021】
機械の始動時に、翼列の熱膨張は典型的には、その大きな質量に基づいて翼よりも高い熱慣性もしくは熱容量を有しているケーシング部分またはロータシャフトの熱膨張よりも著しく迅速である。このことは、駆動媒体が既に公称運転温度Tnに到達した後でも(図2のcの時点tTn)、シャフトまたは別の構造部分の加熱、ひいては熱膨張が継続することを意味する。この事情はいわゆる「ピンチポイント」の発生を招き、すなわち加熱段階において、半径方向のクリアランスがその最小値に達する時点の発生を招く(図2のa参照)。この理由から、公称の定常運転条件のためには、生ぜしめられた最小クリアランススCb,min(またはCv,min)が安全クリアランスCsとギャップに対する最小の過渡的な寄与量(Beitrag)、gt,minとを含んでいなければならない。この寄与量は機械の設計時に分析により決定されなければならず、かつ回転側の構成部分および固定側の構成部分の熱的な境界条件、寸法および材料特性に関連している。ギャップに対する過渡的な寄与量、gt,minおよびgt,maxは、翼先端が、固定側のケーシングまたは固定側の熱シールドもしくはロータまたはロータ熱シールドを擦ることを阻止する。
【0022】
公称の定常運転条件下に、全ての回転側の部分および固定側の部分がその最大の熱的および機械的な変形量に達した場合に、「ピンチポイント」ギャップに対する過渡的な寄与量(gt)は、「高温」の定常状態におけるクリアランスCb,min(またはCv,min)の重要な部分となる。
【先行技術文献】
【特許文献】
【0023】
【特許文献1】欧州特許出願公開第1467066号明細書
【特許文献2】米国特許出願公開第2009/0226327号明細書
【特許文献3】英国特許第2354290号明細書
【特許文献4】米国特許第7686569号明細書
【発明の概要】
【発明が解決しようとする課題】
【0024】
本発明の課題は、冒頭で述べた形式のターボ機械を改良して、回転側の部分と固定側の部分との間のクリアランスが、種々の運転状態に合わせて簡単に最適化されて、高められた効率が達成されるようなターボ機械を提供することである。
【課題を解決するための手段】
【0025】
この課題を解決するために本発明の構成では、高められた運転温度で作動するターボ機械であって、固定側の構成部分と回転側の構成部分とが設けられており、固定側の構成部分と回転側の構成部分との間に、摩擦接触を回避するためにクリアランスが設けられており、該クリアランスが、機械の休止状態では第1の値をとり、機械の定常運転では第2の値をとり、さらに該クリアランスが、休止状態と定常運転との間の過渡的な運転段階では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」)を有する曲線に沿って変化するようになっている形式のターボ機械において、過渡的な運転段階における前記極値を減少させるか、もしくは補償するための非線形の補償メカニズムを備えた補償手段が設けられているようにした。
【発明の効果】
【0026】
本発明の根底を成す問題である、ターボ機械の運転上の移行段階におけるクリアランスに極値が発生するという問題は、設けられた補償手段が、移行の開始時または移行の終了時にその最大変位を有するのではなく、移行範囲自体において、しかもクリアランスの極値が発生する場所にその最大変位を有していることにより解決される。このためには、補償手段において、非線形の補償メカニズムが使用される。この補償メカニズムは、たとえば2つの逆向き運動から重畳されている。
【0027】
本発明によるターボ機械の有利な構成では、補償手段が、外部パラメータに関連してクリアランスを増減させる自己調節装置である。
【0028】
特に、自己調節装置は、クリアランスを増大または減少させるためにその形状を変化させるようになっている。
【0029】
本発明のさらに別の構成では、自己調節装置が、規定された高さを有しており、自己調節装置が、クリアランスを増大または減少させるためにその高さを変化させるようになっている。
【0030】
本発明のさらに別の構成では、自己調節装置が、その温度に関連してクリアランスを増大または減少させるようになっている。
【0031】
本発明のさらに別の有利な構成では、自己調節装置が、その温度特性においてヒステリシスを有している。
【0032】
本発明のさらに別の有利な構成では、自己調節装置が、バイメタルを有している。
【0033】
また、自己調節装置が、形状記憶合金を有していることも考えられる。
【0034】
本発明のさらに別の有利な構成は、回転側のコンポーネントが、動翼であり、影響を与えたいクリアランスが、動翼の先端もしくはチップと、これに向かい合って位置する固定側のケーシングとの間に存在することにより特徴付けられている。
【0035】
本発明のさらに別の有利な構成は、固定側のコンポーネントが、静翼であり、影響を与えたいクリアランスが、静翼の先端もしくはチップと、これに向かい合って位置するロータとの間に存在することにより特徴付けられている。
【0036】
本発明のさらに別の有利な構成は、動翼が、それぞれ翼根元によって、ロータに設けられた収容部内に嵌め込まれていて、支持手段によって、作用する遠心力に抗してロータに支持されており、自己調節装置が、前記支持手段とロータとの間に配置されていることにより特徴付けられている。
【0037】
本発明のさらに別の有利な構成は、自己調節装置がその半径方向の高さを、温度制御することにより、第1の値と第2の値との間で変化させるようになっており、第1と第2の両値の差が、クリアランスの曲線の極値に対応することにより特徴付けられている。
【図面の簡単な説明】
【0038】
【図1】公知先行技術による汎用形式のターボ機械の回転側の部分と固定側の部分との間の機械的なクリアランスを示す概略的な断面図である。
【図2】定常の運転状態に到達するまでの過渡的な始動過程を通過する際のターボ機械におけるクリアランスを時間との関係で示す部分図(a)と、対応する回転速度と時間との関係を示す部分図(b)と、熱ガス温度および金属温度と時間との関係を示す部分図(c)とから成る線図である。
【図3】ロータに設けられた回転側の構成部分(動翼)のアンカ固定部を休止状態で示す部分図(a)と、公称の定常運転条件下で示す部分図(b)とから成る断面図である。
【図4】本発明の1実施形態による、図3に示したアンカ固定部におけるクリアランスを制御するための自己調節式のシステムを示す断面図である。
【図5】本発明における自己調節システムの熱機械的なヒステリシスのための1例を示す線図である。
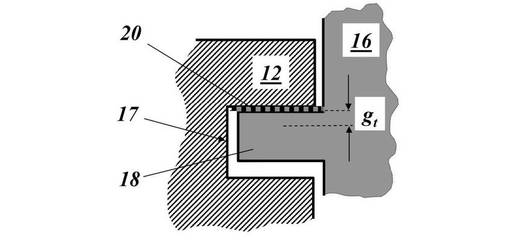
【図6】図4に示した自己調節システムを、公称回転速度において示す断面図である。
【図7】図4および図6に示した自己調節システムを備えたターボ機械におけるクリアランスと時間との関係を示す線図である。
【発明を実施するための形態】
【0039】
以下に、本発明を実施するための形態を図面につき詳しく説明する。
【0040】
本発明は、バイメタルエレメントおよび/または形状記憶合金エレメントおよび/または別の材料から成るエレメントを有する自己調節装置の使用に関する。このエレメントは、温度、圧力または機械的な負荷の限界値よりも上で弾性的、超弾性的または擬弾性的(pseudoelastisch)にその形状を変化させる。このエレメントはアクティブにまたはパッシブに活性化される。このエレメントは、運転時にかつ種々の運転条件下にクリアランスを最小化するために、ターボ機械に配置されている。この自己調節装置はタービンの構成ユニット、圧縮機翼、ステータ熱シールドまたはロータ熱シールド、静翼支持体またはロータあるいはケーシングに取り付けられている別の回転側の構成部分または固定側の構成部分に収納されていてよい。
【0041】
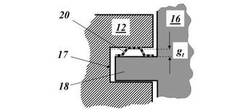
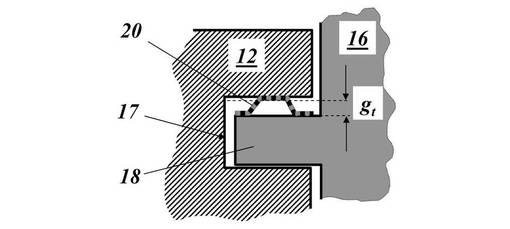
以下に、本発明を使用するための例として、タービンのロータにおける動翼の取付けについて説明する。図4には、自己調節装置20が図示されている。この自己調節装置20は翼根元16に設けられたフィンガ18と、ロータ12に設けられた対応する溝17との間に配置されている。自己調節装置20の変形は、以下に挙げるものとして特徴付けることができる:
a. 外力、たとえば遠心力の作用により開始される外部の2方向効果(2-Wege-Effekt)により生ぜしめられるもの、および/または
b. 系の所望の変形を惹起するために外力を必要としない形状記憶合金におけるような内部の2方向効果により生ぜしめられるもの。
【0042】
自己調節装置20の形状は十分に任意であってよく、一般に提供されているスペースに関連している。形状を決定する際に重要となるのは、図4に図示されているように高さである。図4に図示の実施形態では、自己調節装置20の高さが、機械の休止状態の条件下において、自己調節装置20の使用なしの場合に存在する最小差gt,min(過渡的なギャップ寄与量)に対応している。機械の増速運転時では、翼に作用する遠心力が、フィンガ18を介して自己調節装置20によって、ロータ12に設けられた溝17へ伝達される。この遠心力は回転速度が増大するにつれて高まる。高さgtにおける自己調節装置20の弾性的な特性に基づき、当該装置が扁平に押し潰されることは阻止される。その結果、翼先端におけるクリアランスは翼長さが同じであるとすると、自己調節装置20なしの場合よりも大きいままとなる。しかし、機械的な負荷に基づいた自己調節装置20のある程度の押し潰れによる平坦化は許容され得る。
【0043】
アイドリングから全負荷へ向かって出力が増大するにつれて、機械内の温度は上昇する。回転速度に関して、この昇温プロセスは、より多くの時間を必要とし(図2のb、c)、機械の種々の部分は種々異なる時点に定常温度Tnに到達する。典型的には、昇温の際に「最も遅い」構成部分はロータである。翼根元16およびロータ12の温度が上昇するにつれて、接触面における熱伝導および翼根元16を巡る何らかの熱ガス流による対流式の熱伝達に基づき、自己調節装置20の温度も増大する。
【0044】
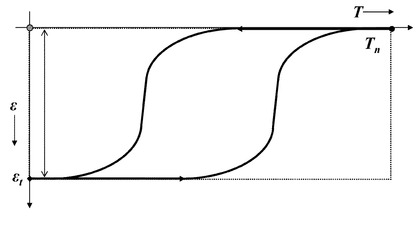
自己調節装置20の材料は、図5に図示されているように、その機械的な特性がその温度Tの関数として、ヒステリシス特性と一致して変化するように状態調節(トレーニング)されている。休止状態および周辺温度においては、自己調節装置20はその扁平な状態から、過渡的なギャップ寄与量gtに対応するεt=σt/Eを有する伸び(歪み)εtにより最大に変形されている(図4)。温度Tが増大するにつれて、自己調節装置20は、トレーニングにより付与されたヒステリシスと一致してその剛性を変化させ、そして予め規定された温度Tnが達成されると、図6に示したように完全に扁平となる。機械の遮断時に、自己調節装置20の熱機械的な特性は、前プログラミングされたヒステリシスの上側の曲線に従う(図5の矢印参照)。
【0045】
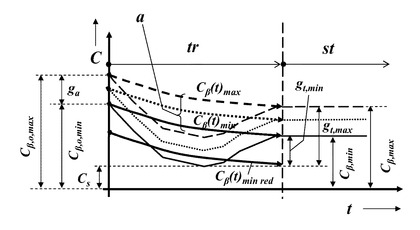
自己調節装置20に適正な高さ(gt)が与えられ、かつこの自己調節装置20が、遠心力負荷および隣接した構成部分の加熱および冷却に適応する、所要の弾性的または超弾性的または擬弾性的な特性および熱ヒステリシスにもたらされると、過渡的な「ピンチポイント」クリアランスの発生を最小限に抑えるか、またはそれどころか完全に回避することが可能となる。その結果、定常の高温状態においてクリアランスは、所要の最小安全クリアランスを考慮して、その可能な限り小さな最小値をとる。理想的には、翼の長さを、自己調節装置20なしの事例に合わせて値gtだけ増大させることができるので、得られる最小クリアランスCβ,o,minはCsに等しくなる(図2のaおよび図7参照)。
【0046】
図7には、(図2のaに比べて)、組み込まれた自己調節装置20を備えた動翼の先端におけるクリアランスの時間的な変化が示されている(曲線a)。曲線Cβ(t)min redは、クリアランスgt,minを除去することにより、組み立てられた低温の状態でも、温かい状態でもクリアランスを減少させることが可能であることを表している。
【0047】
同じ原理が、動翼先端に対向するステータ熱シールドの半径方向運動に対しても適用され得ることを考えると、機械の設計者は、過渡的な運転状態および定常の運転状態の間にクリアランスを調節しかつ制御するための大きな自由度を持っている。
【0048】
さらに、ロータを通流したりロータ部分およびステータ部分を巡って流れる冷却空気流および漏れ空気流に影響を与えることも可能であることを考えると、自己調節装置20の特性をアクティブに制御することも可能である。
【0049】
本発明の枠内では、種々の形状記憶合金、バイメタルおよび/または比較可能な特性を有する別の材料が考慮されている。その製造および構成部分内への組込みについては詳しく説明されていない。なぜならば、その製造および構成部分内への組込みは、形状記憶合金およびバイメタルの分野の当業者に十分に既知であるからである。すなわち、たとえばNiTiを主体とした形状記憶合金は、ガスタービン内に二次空気を用いた冷却が提供されている場合に、最大200℃までに達する許容作業温度を有する高温の翼根元の範囲において考慮され得る。高温NiTiX三元合金および元素XとしてハフニウムHf、パラジウムPdおよび/または白金Ptを含有する別の合金は、作業温度範囲を最大800℃以上にまで拡張する。当然ながら、本発明の枠内では、所望および所要の特性を有する限りは、別の材料/合金を使用することもできる。
【符号の説明】
【0050】
10 ターボ機械
11 ケーシング
12 シャフト(ロータ)
13 軸線
14 動翼
15 静翼
16 根元(翼根元)
17 溝
18 フィンガ
19 ばねエレメント
20 自己調節装置
C クリアランス
Cb 動翼クリアランス
Cs 安全クリアランス
Cv 静翼クリアランス
Cβ,o,max 最大クリアランス(コールド時)
Cβ,o,min 最小クリアランス(コールド時)
Cβ,max 最大クリアランス(ホット時)
Cβ,min 最小クリアランス(ホット時)
Cβ(t)min 最小クリアランス変化を表す曲線
Cβ(t)max 最大クリアランス変化を表す曲線
Cβ(t)min red 自己調節装置を用いた最小クリアランス変化を表す曲線
ga 誤差幅
gt 過渡的なギャップ寄与量
gt,max 最大差(過渡的なギャップ寄与量)
gt,min 再小差(過渡的なギャップ寄与量)
Ω 回転速度
Ωn 回転速度(公称)
st 定常運転段階
tr 過渡的な運転段階
Tn 熱ガス温度(公称)
Tmn 金属温度(公称)
t 時間
T 温度
ε 伸び
σ 応力
E 弾性率
【技術分野】
【0001】
本発明は、たとえばガスタービン、蒸気タービン、航空機推進装置、定置式の圧縮機またはターボチャージャのようなターボ機械の分野に関する。本発明は、高められた運転温度で作動するターボ機械であって、定位置の固定の構成部分(以下「固定側の構成部分」と呼ぶ)と、回転する構成部分(以下「回転側の構成部分」と呼ぶ)とが設けられており、固定側の構成部分と回転側の構成部分との間に、摩擦接触を回避するためにクリアランスが設けられており、該クリアランスが、機械の休止状態では第1の値をとり、機械の定常運転では第2の値をとり、さらに該クリアランスが、休止状態と定常運転との間の過渡的な運転段階では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」)を有する曲線に沿って変化するようになっている形式のターボ機械に関する。
【背景技術】
【0002】
運転中にターボ機械の定位置に固定の部分、すなわち固定側の部分と、回転する部分、すなわち回転側の部分との間のクリアランス、特に半径方向のクリアランスを最小化することは、流れ損失を最小限に抑え、ひいてはこのような機械の効率を最大化するために重要となる。説明のために、図1には、圧縮機配置の形のターボ機械10が図示されている。このターボ機械10は、(軸線13を中心にして)回転するシャフト12に装着された動翼14と、ケーシング11に固定された静翼15とを備えている。動翼14の先端と、動翼先端に向かい合って位置するケーシング11との間の半径方向のクリアランスCbもしくは静翼15の先端と、静翼先端に向かい合って位置するシャフト12との間の半径方向のクリアランスCvを最小化することにより、流れ損失を減少させることができる。
【0003】
たとえば動翼14の翼先端とケーシング11との間の相対運動に基づき、半径方向のクリアランスをゼロに設定することは不可能である。運転中に両部分の間に接触が生じると、この接触により両部分の損傷またはそれどころか両部分の完全な破壊が生ぜしめられる恐れがある。
【0004】
原則的には、運転時の半径方向のクリアランス(いわゆる「ホット時クリアランス」)は、組立て時クリアランス(いわゆる「コールド時クリアランス」、低温の機械の休止状態)が規定される場合に、このような機械の構造において考慮されなければならない一連の要因により決定されると云える:
・ 個々の構成部分の製造誤差;
・ 組立て誤差;
・ 熱効果および遠心力に基づいた、運転時における翼の伸び;
・ 定常運転におけるシャフトおよびケーシングの変形(たとえば「楕円化変形」);
・ たとえば機械の起動時または遮断時のような過渡的な機械運転(機械の運転上の移行段階)時における全ての構成部分の、時間に関連した変形および相対運動。
【0005】
特に、過渡的な運転時における主コンポーネントの、時間に関連した変形および相対運動は、コールド時クリアランスを決定し、そしてその結果生ぜしめられるホット時クリアランスを決定するために重要となる。その目的は、定常運転中に生ぜしめられるホット時クリアランスが最小となるようにコールド時クリアランスを決定することである。機械の加熱時または冷却時における翼、ケーシング部分およびシャフトの機械的および熱的な変形における時定数が互いに異なることに基づき、最小のホット時クリアランスは必ずしも、最小クリアランスが望まれている高温の定常運転において出現するとは限らない。特に機械が、迅速な負荷交番をも受けていること、または先行した運転周期の主要コンポーネントがまだ高温である場合に機械が始動され得ることを考慮すると、生じ得る最も小さなクリアランス(いわゆる「ピンチポイント」)は一般に過渡的な運転段階において出現する。このような場合には、過渡的な運転時における固定側の部分と回転側の部分との間での硬い接触が回避される程度にコールド時クリアランスを大きく拡大させることが必要となる。その場合、このことは当然ながら、定常の条件下では、望まれたものよりも大きく形成されたホット時クリアランスを生ぜしめる。
【0006】
残留ホット時クリアランスが原因で生ぜしめられる流れ損失を最小限に抑えるための公知の手段は、たとえば動翼ブレードおよび静翼ブレードの先端(チップ)にシュラウドを導入することである。シュラウドとケーシングまたはロータとの間の環状ギャップを通る流れを最小限にまで減少させるために、しばしば、回転側の部分には周方向で1つまたは複数のリブが設けられ、固定側の部分の表面は平坦であるかまたは段付けされ、これにより全体的に1つのラビリンス状のシールが形成される。さらに、固定側の部分の表面には、いわゆる「ハニカム(蜂の巣状の材料)」を配置することができる。これにより、リブに、過渡的な運転状態中での切込みを可能にさせ、こうして硬い接触を回避することができる。この場合に得られる、回転側の部分と、切り込まれたハニカムとから成る構成は、段付けされたラビリンスシールに似ていて、ハニカムなしの構成に比べて流れ損失を減少させるために役立つ。ホット時クリアランスを最小化するための別の公知の手段は、固定側の部分にリーフシール(Blattdichtung)またはブラシシール(Buerstendichtung)を設けることにある。リーフシールまたはブラシシールは、運転上の移行段階におけるクリアランスの変化をある程度までは補償することができる。
【0007】
さらに、たとえば摩耗作用を持ったエレメントと、反対側に設けられたアブレイダブル被膜とから成る組合せを使用することもできる。これにより、たとえば構造的な部分の楕円化変形またはケーシング内でのシャフトのある程度の偏心性により生ぜしめられる恐れのある、全周にわたって生じるクリアランス変動の負の効果を弱めることができる。
【0008】
これまで説明した全ての解決手段が、運転時にジオメトリ(幾何学的形状)の何らかのアクティブな調整を行うことなしにホット時クリアランスの最小化を可能にする「純パッシブ」な性質のものであるのに対して、クリアランスを減少させるためのアクティブな手段も多数知られている。
【0009】
すなわち、たとえば機械がその定常の運転状態に達した場合にロータ全体を軸方向に移動させるシステムが知られている。このことは、円錐状の流れ通路との協働において、高温のタービンにおける半径方向のクリアランスをアクティブに最小化することを可能にする。この場合、上で説明したパッシブな手段との組合せも原則的に可能である。しかし、ロータ全体が運動させられなければならないので、圧縮機側における半径方向のクリアランスの拡大が生ぜしめられる。したがって、このような手段は、タービンにおける損失の低減が、コンプレッサ側における付加的な損失を上回る場合にのみ有効となる。
【0010】
シャフトを移動させる代わりに、別の解決手段では、各タービン段において翼の半径方向の熱膨張を制御するか、または予め規定された限界温度が超過されると熱シールドの付加的な半径方向運動を可能にするばねシステムを使用することが提案されている。
【0011】
クリアランスを線形に、つまり一次に調節するための調節手段を使用すること、あるいはまたばね弾性的にフレキシブルな支承手段を使用することが知られている。ばね弾性的にフレキシブルな支承手段は、たとえば欧州特許出願公開第1467066号明細書に記載されている。しかし、これらの技術的な解決手段を用いても、機械の運転上の移行段階におけるクリアランスの極値を補償することは不可能である。
【0012】
米国特許出願公開第2009/0226327号明細書には、ロータディスク内に組み込まれている形状記憶合金から製造された絞りスリーブが記載されている。局所的な温度に関連して、この絞りスリーブはタービン翼内への冷却媒体流の量を制御する。冷却媒体流が減少されると、これにより翼は熱膨張するので、こうして翼先端と、これに向かい合って位置する固定側の構成部分との間の半径方向のギャップが小さくされる。冷却媒体流が増大されると、これにより、翼長さが短くなり、こうして半径方向のギャップが大きくされる。
【0013】
英国特許第2354290号明細書には、ガスタービン翼の冷却通路内に組み込まれた形状記憶合金から製造された弁が記載されている。この弁は構成部分の温度に関連して冷却媒体の消費量を調節する。動翼および静翼のための半径方向のクリアランスの制御については、上記英国特許明細書には何ら記載されていない。
【0014】
米国特許第7686569号明細書には、翼リングの軸方向運動のためのシステムが記載されている。翼リングの軸方向運動は、翼リングに加えられる圧力差、結合部の熱膨張または熱収縮またはピストンにより生ぜしめられる。同じく、形状記憶合金により、所要の運動を生ぜしめることができる。
【0015】
基本的には、回転側の構成部分と固定側の構成部分との間のクリアランスのコントロールのための種々異なるパッシブ型、セミアクティブ型またはアクティブ型のシステムならびにこれらのシステムから成る組合せを考えることができる。回転側のコンポーネントと固定側のコンポーネントとの間の相対的な間隔を表すクリアランスCbまたはCv(図1)は、過渡的な運転状態の間、これらのコンポーネントの、時間に関連した互いに異なる熱的および機械的な変形に基づいて変化する。実際の時間的な経過は、コンポーネントの体積、高温または低温の媒体との接触および使用された合金の熱的な特性のような多数の要因に関連している。
【0016】
これらの時間的に互いに異なる変形に基づき、図2の(a)に示したように、高温時のホット時クリアランスCb(動翼)またはCv(静翼)は安全クリアランスCsの他に、過渡的な成分gt,minを有しなければならない。この過渡的な成分は、低温の組み立てられた状態におけるクリアランスCβ,o,minおよびCβ,o,maxを規定する際に一緒に考慮されなければならない。
【0017】
図2の部分図(a)には、定常の運転段階(st)および過渡的な運転段階(tr)に関して、回転側の高温の部分と固定側の高温の部分との間のクリアランスの変化を時間との関係で示す一例が示されている。この場合、既に述べたように、Csは安全クリアランスを表し、gaは構成部分の製造誤差および組立て誤差に基づいた誤差幅を表し、gt,minおよびgt,maxは、定常の状態におけるクリアランスと、最小クリアランスとの間の最小差および最大差を表し、Cβ,minおよびCβ,maxは公称(「高温」)の運転条件のための最小クリアランスおよび最大クリアランスを表し、Cβ,o,minおよびCβ,o,maxは休止状態(「低温」の運転条件)における相応する最小クリアランスおよび最大クリアランスを表す(添え字βは「b」もしくは動翼、または「v」もしくは静翼を表す、図1参照)。
【0018】
図2の(b)および(c)には、シャフト12の回転速度Ω、駆動媒体(熱ガス)の温度Tおよび金属温度Tmnの、生じ得る変化を時間との関係で示す線図が示されており、この場合、ΩnおよびTnは相応して、公称回転速度および機械における公称熱ガス温度を意味する。金属温度Tmnは、機械の定常運転時におけるシャフトおよび/または別の機械的なコンポーネントの公称温度を表す。tΩnおよびtTnは、定常値ΩnおよびTnが達成される時点である。
【0019】
図3には、ベースもしくは根元16によって、ロータ(シャフト12)に設けられた相応する収容部内に取り付けられている、回転側の構成部分(図示の例では動翼14)が、機械の休止状態(図3のa)における横断面図と、公称の定常運転条件(図3のb)下での横断面図とで示されている。図示の根元16はそれぞれ任意の根元ジオメトリ(根元幾何学的形状)、たとえばクリスマスツリー形根元、ダブテイル形根元またはハンマヘッド形根元であってよい。
【0020】
遠心力は根元16に設けられた複数のフィンガ18の1つまたは幾つかをロータ12と接触させる(図3のb)。低い回転速度では、ばねエレメント19により、根元16が収容部内で、ゆっくりとした回転速度の際にがたつくことが阻止される。公称回転速度において、かつ機械の全てのコンポーネントの熱平衡が達成された後に、図1に示したクリアランスCbまたはCvが達成される。gaはこの場合、やはり製作誤差および組立て誤差からの誤差幅を表し、機械の休止状態におけるフィンガ18とロータ収容部との間に例示的に示されている。
【0021】
機械の始動時に、翼列の熱膨張は典型的には、その大きな質量に基づいて翼よりも高い熱慣性もしくは熱容量を有しているケーシング部分またはロータシャフトの熱膨張よりも著しく迅速である。このことは、駆動媒体が既に公称運転温度Tnに到達した後でも(図2のcの時点tTn)、シャフトまたは別の構造部分の加熱、ひいては熱膨張が継続することを意味する。この事情はいわゆる「ピンチポイント」の発生を招き、すなわち加熱段階において、半径方向のクリアランスがその最小値に達する時点の発生を招く(図2のa参照)。この理由から、公称の定常運転条件のためには、生ぜしめられた最小クリアランススCb,min(またはCv,min)が安全クリアランスCsとギャップに対する最小の過渡的な寄与量(Beitrag)、gt,minとを含んでいなければならない。この寄与量は機械の設計時に分析により決定されなければならず、かつ回転側の構成部分および固定側の構成部分の熱的な境界条件、寸法および材料特性に関連している。ギャップに対する過渡的な寄与量、gt,minおよびgt,maxは、翼先端が、固定側のケーシングまたは固定側の熱シールドもしくはロータまたはロータ熱シールドを擦ることを阻止する。
【0022】
公称の定常運転条件下に、全ての回転側の部分および固定側の部分がその最大の熱的および機械的な変形量に達した場合に、「ピンチポイント」ギャップに対する過渡的な寄与量(gt)は、「高温」の定常状態におけるクリアランスCb,min(またはCv,min)の重要な部分となる。
【先行技術文献】
【特許文献】
【0023】
【特許文献1】欧州特許出願公開第1467066号明細書
【特許文献2】米国特許出願公開第2009/0226327号明細書
【特許文献3】英国特許第2354290号明細書
【特許文献4】米国特許第7686569号明細書
【発明の概要】
【発明が解決しようとする課題】
【0024】
本発明の課題は、冒頭で述べた形式のターボ機械を改良して、回転側の部分と固定側の部分との間のクリアランスが、種々の運転状態に合わせて簡単に最適化されて、高められた効率が達成されるようなターボ機械を提供することである。
【課題を解決するための手段】
【0025】
この課題を解決するために本発明の構成では、高められた運転温度で作動するターボ機械であって、固定側の構成部分と回転側の構成部分とが設けられており、固定側の構成部分と回転側の構成部分との間に、摩擦接触を回避するためにクリアランスが設けられており、該クリアランスが、機械の休止状態では第1の値をとり、機械の定常運転では第2の値をとり、さらに該クリアランスが、休止状態と定常運転との間の過渡的な運転段階では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」)を有する曲線に沿って変化するようになっている形式のターボ機械において、過渡的な運転段階における前記極値を減少させるか、もしくは補償するための非線形の補償メカニズムを備えた補償手段が設けられているようにした。
【発明の効果】
【0026】
本発明の根底を成す問題である、ターボ機械の運転上の移行段階におけるクリアランスに極値が発生するという問題は、設けられた補償手段が、移行の開始時または移行の終了時にその最大変位を有するのではなく、移行範囲自体において、しかもクリアランスの極値が発生する場所にその最大変位を有していることにより解決される。このためには、補償手段において、非線形の補償メカニズムが使用される。この補償メカニズムは、たとえば2つの逆向き運動から重畳されている。
【0027】
本発明によるターボ機械の有利な構成では、補償手段が、外部パラメータに関連してクリアランスを増減させる自己調節装置である。
【0028】
特に、自己調節装置は、クリアランスを増大または減少させるためにその形状を変化させるようになっている。
【0029】
本発明のさらに別の構成では、自己調節装置が、規定された高さを有しており、自己調節装置が、クリアランスを増大または減少させるためにその高さを変化させるようになっている。
【0030】
本発明のさらに別の構成では、自己調節装置が、その温度に関連してクリアランスを増大または減少させるようになっている。
【0031】
本発明のさらに別の有利な構成では、自己調節装置が、その温度特性においてヒステリシスを有している。
【0032】
本発明のさらに別の有利な構成では、自己調節装置が、バイメタルを有している。
【0033】
また、自己調節装置が、形状記憶合金を有していることも考えられる。
【0034】
本発明のさらに別の有利な構成は、回転側のコンポーネントが、動翼であり、影響を与えたいクリアランスが、動翼の先端もしくはチップと、これに向かい合って位置する固定側のケーシングとの間に存在することにより特徴付けられている。
【0035】
本発明のさらに別の有利な構成は、固定側のコンポーネントが、静翼であり、影響を与えたいクリアランスが、静翼の先端もしくはチップと、これに向かい合って位置するロータとの間に存在することにより特徴付けられている。
【0036】
本発明のさらに別の有利な構成は、動翼が、それぞれ翼根元によって、ロータに設けられた収容部内に嵌め込まれていて、支持手段によって、作用する遠心力に抗してロータに支持されており、自己調節装置が、前記支持手段とロータとの間に配置されていることにより特徴付けられている。
【0037】
本発明のさらに別の有利な構成は、自己調節装置がその半径方向の高さを、温度制御することにより、第1の値と第2の値との間で変化させるようになっており、第1と第2の両値の差が、クリアランスの曲線の極値に対応することにより特徴付けられている。
【図面の簡単な説明】
【0038】
【図1】公知先行技術による汎用形式のターボ機械の回転側の部分と固定側の部分との間の機械的なクリアランスを示す概略的な断面図である。
【図2】定常の運転状態に到達するまでの過渡的な始動過程を通過する際のターボ機械におけるクリアランスを時間との関係で示す部分図(a)と、対応する回転速度と時間との関係を示す部分図(b)と、熱ガス温度および金属温度と時間との関係を示す部分図(c)とから成る線図である。
【図3】ロータに設けられた回転側の構成部分(動翼)のアンカ固定部を休止状態で示す部分図(a)と、公称の定常運転条件下で示す部分図(b)とから成る断面図である。
【図4】本発明の1実施形態による、図3に示したアンカ固定部におけるクリアランスを制御するための自己調節式のシステムを示す断面図である。
【図5】本発明における自己調節システムの熱機械的なヒステリシスのための1例を示す線図である。
【図6】図4に示した自己調節システムを、公称回転速度において示す断面図である。
【図7】図4および図6に示した自己調節システムを備えたターボ機械におけるクリアランスと時間との関係を示す線図である。
【発明を実施するための形態】
【0039】
以下に、本発明を実施するための形態を図面につき詳しく説明する。
【0040】
本発明は、バイメタルエレメントおよび/または形状記憶合金エレメントおよび/または別の材料から成るエレメントを有する自己調節装置の使用に関する。このエレメントは、温度、圧力または機械的な負荷の限界値よりも上で弾性的、超弾性的または擬弾性的(pseudoelastisch)にその形状を変化させる。このエレメントはアクティブにまたはパッシブに活性化される。このエレメントは、運転時にかつ種々の運転条件下にクリアランスを最小化するために、ターボ機械に配置されている。この自己調節装置はタービンの構成ユニット、圧縮機翼、ステータ熱シールドまたはロータ熱シールド、静翼支持体またはロータあるいはケーシングに取り付けられている別の回転側の構成部分または固定側の構成部分に収納されていてよい。
【0041】
以下に、本発明を使用するための例として、タービンのロータにおける動翼の取付けについて説明する。図4には、自己調節装置20が図示されている。この自己調節装置20は翼根元16に設けられたフィンガ18と、ロータ12に設けられた対応する溝17との間に配置されている。自己調節装置20の変形は、以下に挙げるものとして特徴付けることができる:
a. 外力、たとえば遠心力の作用により開始される外部の2方向効果(2-Wege-Effekt)により生ぜしめられるもの、および/または
b. 系の所望の変形を惹起するために外力を必要としない形状記憶合金におけるような内部の2方向効果により生ぜしめられるもの。
【0042】
自己調節装置20の形状は十分に任意であってよく、一般に提供されているスペースに関連している。形状を決定する際に重要となるのは、図4に図示されているように高さである。図4に図示の実施形態では、自己調節装置20の高さが、機械の休止状態の条件下において、自己調節装置20の使用なしの場合に存在する最小差gt,min(過渡的なギャップ寄与量)に対応している。機械の増速運転時では、翼に作用する遠心力が、フィンガ18を介して自己調節装置20によって、ロータ12に設けられた溝17へ伝達される。この遠心力は回転速度が増大するにつれて高まる。高さgtにおける自己調節装置20の弾性的な特性に基づき、当該装置が扁平に押し潰されることは阻止される。その結果、翼先端におけるクリアランスは翼長さが同じであるとすると、自己調節装置20なしの場合よりも大きいままとなる。しかし、機械的な負荷に基づいた自己調節装置20のある程度の押し潰れによる平坦化は許容され得る。
【0043】
アイドリングから全負荷へ向かって出力が増大するにつれて、機械内の温度は上昇する。回転速度に関して、この昇温プロセスは、より多くの時間を必要とし(図2のb、c)、機械の種々の部分は種々異なる時点に定常温度Tnに到達する。典型的には、昇温の際に「最も遅い」構成部分はロータである。翼根元16およびロータ12の温度が上昇するにつれて、接触面における熱伝導および翼根元16を巡る何らかの熱ガス流による対流式の熱伝達に基づき、自己調節装置20の温度も増大する。
【0044】
自己調節装置20の材料は、図5に図示されているように、その機械的な特性がその温度Tの関数として、ヒステリシス特性と一致して変化するように状態調節(トレーニング)されている。休止状態および周辺温度においては、自己調節装置20はその扁平な状態から、過渡的なギャップ寄与量gtに対応するεt=σt/Eを有する伸び(歪み)εtにより最大に変形されている(図4)。温度Tが増大するにつれて、自己調節装置20は、トレーニングにより付与されたヒステリシスと一致してその剛性を変化させ、そして予め規定された温度Tnが達成されると、図6に示したように完全に扁平となる。機械の遮断時に、自己調節装置20の熱機械的な特性は、前プログラミングされたヒステリシスの上側の曲線に従う(図5の矢印参照)。
【0045】
自己調節装置20に適正な高さ(gt)が与えられ、かつこの自己調節装置20が、遠心力負荷および隣接した構成部分の加熱および冷却に適応する、所要の弾性的または超弾性的または擬弾性的な特性および熱ヒステリシスにもたらされると、過渡的な「ピンチポイント」クリアランスの発生を最小限に抑えるか、またはそれどころか完全に回避することが可能となる。その結果、定常の高温状態においてクリアランスは、所要の最小安全クリアランスを考慮して、その可能な限り小さな最小値をとる。理想的には、翼の長さを、自己調節装置20なしの事例に合わせて値gtだけ増大させることができるので、得られる最小クリアランスCβ,o,minはCsに等しくなる(図2のaおよび図7参照)。
【0046】
図7には、(図2のaに比べて)、組み込まれた自己調節装置20を備えた動翼の先端におけるクリアランスの時間的な変化が示されている(曲線a)。曲線Cβ(t)min redは、クリアランスgt,minを除去することにより、組み立てられた低温の状態でも、温かい状態でもクリアランスを減少させることが可能であることを表している。
【0047】
同じ原理が、動翼先端に対向するステータ熱シールドの半径方向運動に対しても適用され得ることを考えると、機械の設計者は、過渡的な運転状態および定常の運転状態の間にクリアランスを調節しかつ制御するための大きな自由度を持っている。
【0048】
さらに、ロータを通流したりロータ部分およびステータ部分を巡って流れる冷却空気流および漏れ空気流に影響を与えることも可能であることを考えると、自己調節装置20の特性をアクティブに制御することも可能である。
【0049】
本発明の枠内では、種々の形状記憶合金、バイメタルおよび/または比較可能な特性を有する別の材料が考慮されている。その製造および構成部分内への組込みについては詳しく説明されていない。なぜならば、その製造および構成部分内への組込みは、形状記憶合金およびバイメタルの分野の当業者に十分に既知であるからである。すなわち、たとえばNiTiを主体とした形状記憶合金は、ガスタービン内に二次空気を用いた冷却が提供されている場合に、最大200℃までに達する許容作業温度を有する高温の翼根元の範囲において考慮され得る。高温NiTiX三元合金および元素XとしてハフニウムHf、パラジウムPdおよび/または白金Ptを含有する別の合金は、作業温度範囲を最大800℃以上にまで拡張する。当然ながら、本発明の枠内では、所望および所要の特性を有する限りは、別の材料/合金を使用することもできる。
【符号の説明】
【0050】
10 ターボ機械
11 ケーシング
12 シャフト(ロータ)
13 軸線
14 動翼
15 静翼
16 根元(翼根元)
17 溝
18 フィンガ
19 ばねエレメント
20 自己調節装置
C クリアランス
Cb 動翼クリアランス
Cs 安全クリアランス
Cv 静翼クリアランス
Cβ,o,max 最大クリアランス(コールド時)
Cβ,o,min 最小クリアランス(コールド時)
Cβ,max 最大クリアランス(ホット時)
Cβ,min 最小クリアランス(ホット時)
Cβ(t)min 最小クリアランス変化を表す曲線
Cβ(t)max 最大クリアランス変化を表す曲線
Cβ(t)min red 自己調節装置を用いた最小クリアランス変化を表す曲線
ga 誤差幅
gt 過渡的なギャップ寄与量
gt,max 最大差(過渡的なギャップ寄与量)
gt,min 再小差(過渡的なギャップ寄与量)
Ω 回転速度
Ωn 回転速度(公称)
st 定常運転段階
tr 過渡的な運転段階
Tn 熱ガス温度(公称)
Tmn 金属温度(公称)
t 時間
T 温度
ε 伸び
σ 応力
E 弾性率
【特許請求の範囲】
【請求項1】
高められた運転温度で作動するターボ機械(10)であって、固定側の構成部分(11,15)と回転側の構成部分(12,14)とが設けられており、固定側の構成部分(11,15)と回転側の構成部分(12,14)との間に、摩擦接触を回避するためにクリアランス(C)が設けられており、該クリアランス(C)が、機械の休止状態では第1の値(Cβ,o,min;Cβ,o,max)をとり、機械の定常運転(St)では第2の値(Cβ,min;Cβ,max)をとり、さらに該クリアランス(C)が、休止状態と定常運転(st)との間の過渡的な運転段階(tr)では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」;gt)を有する曲線に沿って変化するようになっている形式のターボ機械において、過渡的な運転段階(tr)における前記極値を減少させるか、もしくは補償するための非線形の補償メカニズムを備えた補償手段(20)が設けられていることを特徴とするターボ機械。
【請求項2】
補償手段が、外部パラメータに関連してクリアランス(C)を増大または減少させる自己調節装置(20)である、請求項1記載のターボ機械。
【請求項3】
自己調節装置(20)が、クリアランス(C)を増大または減少させるためにその形状を変化させる、請求項2記載のターボ機械。
【請求項4】
自己調節装置(20)が、規定された高さを有しており、自己調節装置(20)が、クリアランス(C)を増大または減少させるためにその高さを変化させる、請求項3記載のターボ機械。
【請求項5】
自己調節装置(20)が、その温度に関連してクリアランス(C)を増大させるか、または減少させる、請求項2から4までのいずれか1項記載のターボ機械。
【請求項6】
自己調節装置(20)が、その温度特性においてヒステリシスを有している、請求項5記載のターボ機械。
【請求項7】
自己調節装置(20)が、バイメタルを有している、請求項5または6記載のターボ機械。
【請求項8】
自己調節装置(20)が、形状記憶合金を有している、請求項5または6記載のターボ機械。
【請求項9】
回転側のコンポーネントが、動翼(14)であり、影響を与えたいクリアランス(Cb)が、動翼(14)の先端と、向かい合って位置する固定側のケーシング(11)との間に存在する、請求項1から8までのいずれか1項記載のターボ機械。
【請求項10】
固定側のコンポーネントが、静翼(15)であり、影響を与えたいクリアランス(Cv)が、静翼(15)の先端と、向かい合って位置するロータ(12)との間に存在する、請求項1から8までのいずれか1項記載のターボ機械。
【請求項11】
動翼(14)が、それぞれ翼根元(16)によって、ロータ(12)に設けられた収容部内に嵌め込まれていて、支持手段(18)によって、作用する遠心力に抗してロータ(17)に支持されており、自己調節装置(20)が、前記支持手段(18)とロータ(12,17)との間に配置されている、請求項9記載のターボ機械。
【請求項12】
自己調節装置(20)がその半径方向の高さを、温度制御することにより、第1の値と第2の値との間で変化させるようになっており、第1と第2の両値の差が、クリアランス(C)の曲線の極値(gt)に対応する、請求項11記載のターボ機械。
【請求項1】
高められた運転温度で作動するターボ機械(10)であって、固定側の構成部分(11,15)と回転側の構成部分(12,14)とが設けられており、固定側の構成部分(11,15)と回転側の構成部分(12,14)との間に、摩擦接触を回避するためにクリアランス(C)が設けられており、該クリアランス(C)が、機械の休止状態では第1の値(Cβ,o,min;Cβ,o,max)をとり、機械の定常運転(St)では第2の値(Cβ,min;Cβ,max)をとり、さらに該クリアランス(C)が、休止状態と定常運転(st)との間の過渡的な運転段階(tr)では、種々異なるコンポーネントの回転速度および熱膨張の、互いに異なる時間的な変化に基づいて、極値(「ピンチポイント」;gt)を有する曲線に沿って変化するようになっている形式のターボ機械において、過渡的な運転段階(tr)における前記極値を減少させるか、もしくは補償するための非線形の補償メカニズムを備えた補償手段(20)が設けられていることを特徴とするターボ機械。
【請求項2】
補償手段が、外部パラメータに関連してクリアランス(C)を増大または減少させる自己調節装置(20)である、請求項1記載のターボ機械。
【請求項3】
自己調節装置(20)が、クリアランス(C)を増大または減少させるためにその形状を変化させる、請求項2記載のターボ機械。
【請求項4】
自己調節装置(20)が、規定された高さを有しており、自己調節装置(20)が、クリアランス(C)を増大または減少させるためにその高さを変化させる、請求項3記載のターボ機械。
【請求項5】
自己調節装置(20)が、その温度に関連してクリアランス(C)を増大させるか、または減少させる、請求項2から4までのいずれか1項記載のターボ機械。
【請求項6】
自己調節装置(20)が、その温度特性においてヒステリシスを有している、請求項5記載のターボ機械。
【請求項7】
自己調節装置(20)が、バイメタルを有している、請求項5または6記載のターボ機械。
【請求項8】
自己調節装置(20)が、形状記憶合金を有している、請求項5または6記載のターボ機械。
【請求項9】
回転側のコンポーネントが、動翼(14)であり、影響を与えたいクリアランス(Cb)が、動翼(14)の先端と、向かい合って位置する固定側のケーシング(11)との間に存在する、請求項1から8までのいずれか1項記載のターボ機械。
【請求項10】
固定側のコンポーネントが、静翼(15)であり、影響を与えたいクリアランス(Cv)が、静翼(15)の先端と、向かい合って位置するロータ(12)との間に存在する、請求項1から8までのいずれか1項記載のターボ機械。
【請求項11】
動翼(14)が、それぞれ翼根元(16)によって、ロータ(12)に設けられた収容部内に嵌め込まれていて、支持手段(18)によって、作用する遠心力に抗してロータ(17)に支持されており、自己調節装置(20)が、前記支持手段(18)とロータ(12,17)との間に配置されている、請求項9記載のターボ機械。
【請求項12】
自己調節装置(20)がその半径方向の高さを、温度制御することにより、第1の値と第2の値との間で変化させるようになっており、第1と第2の両値の差が、クリアランス(C)の曲線の極値(gt)に対応する、請求項11記載のターボ機械。
【図2】


【図5】
【図7】
【図1】
【図3】
【図4】
【図6】
【図5】
【図7】
【図1】
【図3】
【図4】
【図6】
【公開番号】特開2012−246923(P2012−246923A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2012−118739(P2012−118739)
【出願日】平成24年5月24日(2012.5.24)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5400 Baden, Switzerland
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成24年5月24日(2012.5.24)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5400 Baden, Switzerland
【Fターム(参考)】
[ Back to top ]