
ダイナミック先験的画像制限画像再構成法
アンダーサンプルされた画像データから良質の画像を再構成する方法を提供する。該画像再構成法は多くの異なる撮像手段に用いることができる。特に、本発明は、適切な先験的画像を画像再構成プロセスに組み込む画像再構成法を提供する。従って、本発明の一側面は、圧縮センシング等の従来の方法よりも少ない数のデータサンプルを用いて所望の画像を正確に再構成する画像再構成法を提供することである。本発明の別の側面は、撮像システムを用いて通常達成することができるものよりも高い時間分解能を示す所望の画像の時系列画像を作成する画像再構成法を、提供することである。例えば、ガントリー回転速度が低速であるCT撮像システムを用いることにより、高い時間分解能(例えば20ミリ秒)を用いて、心拍フェーズ画像が作成される。

【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の参照)
本出願は、2007年12月20日に出願された「先験的画像制限圧縮センシング(prior image constrained compressed sensing)を用いた画像再構成法」と称する米国仮出願番号61/015,559、及び、2008年1月14日に出願された「先験的画像制限圧縮センシングを用いた画像再構成法」と称する米国仮出願番号61/020,847、及び、2008年6月9日に出願された「先験的画像制限圧縮センシングを用いた画像再構成法」と称する米国仮出願番号61/059,891の利益を主張する。
【0002】
(連邦政府の委託研究の記載)
本発明は、政府機関である国立衛生研究所NIH EB005712及びNIH EB007021により認められた政府支援によりなされたものである。米国政府は本発明に関し一定の権利を有する。
【0003】
本発明は、医用画像、特に取得された画像データから画像を再構成する方法に関する。
【背景技術】
【0004】
コンピュータ断層撮影システムにおいては、「画像面」と称されるデカルト座標系のXY平面内に位置するように視準された扇状のビームがX線源により投影される。このX線ビームは、患者などの撮像される対象を通り抜けて複数の配列された放射線検出器に作用する。透過した放射線の強度は前記対象によるX線の減衰に依存し、各検出器により、別々の電気信号がビームの減衰の測定結果として生成される。全ての検出からの減衰の測定結果が別々に取得され、いわゆる「透過プロファイル」又は「減衰プロファイル」又は「投影」が作成される。
【0005】
従来のCTシステムにおけるX線源及び検出器配列は、対象を横切るX線ビームの角度が常に変化するよう、画像平面内のガントリーの上で対象の周りに回転される。与えられた角度における検出器配列からの透過プロファイルは「ビュー」と呼ばれ、そして、対象の「スキャン」にはX線源及び検出器が一回転する間の異なる角度の向きにおいて得られる複数のビューのセットが含まれる。2次元スキャンにおいては、データが処理されて、対象に渡って得られる二次元的スライスに対応する画像が構成される。2次元データから画像を再構成するための一般的な方法は、この分野ではフィルタ補正逆投影法と称される。この画像再構成処理においては、スキャン中に取得された減衰測定結果が、「CT数」又は「ハウンズフィールド単位」と称される整数へと変換され、これらはディスプレイ上の対応する画素の輝度を調整するために用いられる。
【0006】
フィルタ補正逆投影画像再構成は、取得された透過プロファイルからCT画像を再構成するために用いられる最も一般的な技法である。図1に示されるように、プロファイル100における各レイサム(ray sum)104を、矢印106で示されるレイサム104を生成したX線経路と同じX線経路に沿ってFOV102を介して投影することにより、各取得されたX線透過プロファイル100が撮像領域(FOV)102上に逆投影される。FOV102内に各レイサム104を投影する時、我々は物体の先験的情報(priori knowledge)を有しておらず、FOV102内のX線の減衰は均一であり且つレイサムはX線経路が通る各画素内に平等に分配されると仮定している。例えば、一つの透過プロファイル100における単一のレイサム104のX線経路108が図1に図示されており、これがFOV102内のN個の画素を通っている。このレイサム104の減衰値PはこれらN個の画素の間で平等に分けられる。
【0007】
【数1】
【0008】
ここで、μnはN個の画素を有するX線経路内のn番目の画素に分配される減衰値である。
【0009】
明らかに、FOV102内の減衰が均一であるという仮定は正しくない。しかしながら、この分野で周知のように、特定の補正が各透過プロファイル100になされ、そして、充分な数のプロファイルが投影角の対応する数において取得されれば、上記の間違った仮定に起因するエラーは最小化されると共に画像アーチファクトも抑制される。画像再構成の典型的なフィルタ補正逆投影法においては、2次元CT画像における画像アーチファクトを適切に抑制するためには、400から1000ビューが通常必要とされる。
【0010】
X線CTの別の問題は、スキャン中に物体がさらされるX線の放射線量である。解像度のより高いアーチファクトのない画像を得るためには、所望の信号ノイズ比(SNR)で画像を再構成するために充分に高いX線強度において多くのビューを得る必要がある。放射線量のレベルは、ビームの強さを小さくする又は取得されたビューの数を減らすことにより小さくすることができるが、何れの方法も再構成された画像のSNRをも減少させてしまう。
【0011】
一般的に、心臓CT撮像は特に困難な課題である。例えば、冠動脈の細かい枝を画像化するためにはサブミリメーター等方性空間分解能が必要となる。心臓のコンピュータ断層撮影は、最初、電子ビームCT(EBCT)により心臓の硬化を評価する造影剤を用いることなく実施されていた。動くものがないことにより、EBCTによるスキャン時間は50ミリ秒以下となる。EBCTによる取得は、高い時間分解能を提供する一方、その空間分解能は、例えば、スライス厚3ミリメーターの面内分解能1.2ミリメーターと低い。近年、従来の回転ガントリーCTは大きく改善されている。最先端の64スライス又は320スライス多検出器型CT(MDCT)においては、0.6x0.6x0.6mm3等方性空間分解能が可能である。さらに、最先端のCTガントリーは、シングルX線源−検出器システムにおいて一回転0.27秒で回転し、これにより、心臓の撮像において150ミリ秒の時間分解能が達成される。
【0012】
磁気共鳴撮像(MRI)は、核磁気共鳴(NMR)現象を利用して画像を作成する。ヒト組織等の物質が均一な磁場(分極磁場B0)を受けると、その組織内におけるスピンの個々の磁気モーメントは、この分極磁場に沿って整列しようとするが、その周囲でそれらが有する固有ラーモア周波数でランダムに歳差運動を行う。この物質又は組織が、xy平面にあって且つラーモア周波数に近い磁場(励起磁場B1)を受けると、ネット整列モーメントMzは、そのxy平面に回転し、あるいは「傾いて」、ネット横磁気モーメントMxyを生成する。励起されたスピンにより信号が出力され、励起信号B1の終了後にこの信号が受信されて画像を形成するために処理される。
【0013】
これらの信号を利用して画像を作成する際には、磁場勾配(Gx、Gy、及びGz)が用いられる。通常、撮像される領域は、使用される特定の位置決め法にしたがってこれらの勾配が変動する連続的な測定サイクルによりスキャンされる。この分野では各測定が「ビュー」と称され、このビューの数でその画像の解像度が決定される。結果として生じる受信NMR信号またはビューまたはk空間サンプル数のセットは、デジタル化され、処理されて、周知の多くの再構成技法の一つを用いて画像が再構成される。合計スキャン時間は、一部においては、各測定サイクルまたは「パルスシーケンス」の長さにより決定され、そして一部においては、一つの画像に対して取得される測定サイクル数またはビューの数により決定される。多くの臨床的応用において既定の解像度を有する画像における合計スキャン時間及びSNRが重要視されていることから、それを念頭に置いた多くの改善がなされている。
【0014】
投影再構成法は、磁気共鳴撮像法の開始以来知られており、この方法は、米国特許第6,487,435号に開示されているように再び用いられている。図2(a)に示されるように、フーリエ・イメージング法で行われる直線的、又はカーテシアンの、スキャンパターンでk空間をサンプリングするのではなく、投影再構成法はむしろ、図2(b)に示されるように、k空間の中央から外向きに伸びる半径方向の線をサンプリングする一連のビューをとともにk空間をサンプリングする。k空間をサンプリングするのに必要とされるビューの数によりそのスキャンの長さが決定され、取得されたビューの数が不十分な場合には、その再構成画像にストリークアーチファクトが生じることとなる。米国特許第6,487,435号に開示された技法においては、インターリーブされたビューを伴う一連のアンダーサンプルされた画像を取得し、周縁k空間データを一連の画像フレーム間で共有することにより、そのようなストリーキングを減少させている。
【0015】
取得された投影ビューのセットから画像を再構成するために用いられる方法の2つの例が、例えば米国特許第6,710,686に開示されている。MRIにおいて最も一般的な方法は、k空間サンプルを半径方向サンプリング軌道上のそれらの位置をカーテシアングリッドに再グリッドすることである。その後、再グリッドされたk空間サンプルに対して二次元または三次元フーリエ変換を実行することで、画像が再構成される。MR画像を再構成する第二の方法は、半径方向のk空間投影ビューを、まず各投影ビューをフーリエ変換してからラドン空間に変換することである。これらの信号投影をフィルタ補正して撮像領域(FOV)へと逆投影することにより、それらの信号投影から画像が再構成される。この分野において周知のように、取得された信号投影の数が、ナイキストサンプリング理論(Nyquist sampling theorem)を満たすために必要とされる数よりも不十分な場合には、再構成画像にストリークアーチファクトが生じることとなる。
【0016】
用いられる技法により、医療用画像を作成するために現在用いされているMRスキャンの多くが、必要データを取得するまでに長い時間を要する。スキャン時間が短縮されると、患者数が増加し、患者への快適さが改善され、そして動きによるアーチファクトの減少による画質が向上することなどから、そのようなスキャン時間の短縮は重要な懸念事項である。このスキャン時間を短縮するための様々な方法が開発されている。
【0017】
そのような方法の一つには、一般的に「パラレル・イメージング」と呼ばれるものが挙げられる。パラレル・イメージング技法は、RFパルスと磁場勾配とを用いて順次取得しなければならないエンコーディング(位相エンコーディング又は周波数エンコーディング)の代わりに、RF受信コイルの配列からの空間情報を用いる。配列の空間的に独立した各受信コイルは、一定の空間情報を運ぶとともに、異なる感度プロフィールを有している。この情報は、別々のコイルから受信される同時に取得されたデータを組み合わせることにより受信されたMR信号の完全な位置エンコーディングを達成するために用いられる。具体的には、パラレル・イメージング技法においては、k空間内でカバーされる最大範囲を固定したままで、取得された位相エンコードk空間サンプリングの線の数を減らすことにより、k空間をサンプリングする。別々の受信コイルにより生成された別々のMR信号を組み合わせることにより、一つの画像に必要な取得時間が短縮され(従来のk空間データ取得との比較)、最も好ましい場合においては、受信コイルの数に倍数短縮される。したがって、複数の受信コイルを用いることで、勾配切替速度またはRFパワーを増加させることなく、撮像速度を倍増させることができる。
【0018】
生体内撮像用に開発され適用される、そのようなパラレル・イメージング技法の二つのカテゴリには、SENSE(SENSitivity Encoding)及びSMASH(SiMultaneous Acquisition of Spatial Harmonics)が含まれる。SENSEにおいては、アンダーサンプルされたk空間データが、まずフーリエ変換により各コイルからエイリアス画像が作成され、その後、重ね合わせられた画素値の線形変換によりそのエイリアス画像信号が展開される。SMASHにおいては、異なる受信コイルにより取得される近接する線の加重された組み合わせを構成することにより、省略されたk空間の線が埋められる又はフーリエ変換の前に再構成される。SMASHにおいては、コイルの空間的感度を決定することが必要とされ、その決定をする一つの方法は、可変な密度を有するk空間サンプリングの使用を伴う「オートキャリブレーション」である。
【0019】
上記の撮像手段の例においてはデータ取得方法が大きく異なる。即ち、一方ではMRデータ取得においてフーリエ係数を求めるためにk空間がサンプルされ、もう一方ではX線CTデータ取得において整数が測定される。それにもかかわらず、上記の両方の撮像手段のための画像再構成においては、アンダーサンプルされたデータのセットから質の高い画像を再構成する、という共通の課題がある。
【0020】
一般的な画像再構成理論によれば、エイリアシングアーチファクトのない画像を再構成するためには、画像データを取得するために用いられるサンプリングレートが、ナイキスト−シャノンのサンプリング定理に示されるいわゆるナイキスト基準を満たしている必要がある。さらに、一般的な画像再構成理論においては、画像に関する細かい事前情報は必要とされない。その一方で、所望又はターゲットとする画像に関するいくつかの事前情報が利用でき、それを画像再構成プロセスの中に適切に盛り込まれた場合には、ナイキスト基準が満たされていなくとも、画像は正確に再構成される。例えば、所望の目標画像が円対称性を有し且つ空間的に一様であることが分かっている場合には、平行ビーム投影のうちの一つのビューのみ(即ち一つの投影ビュー)が、対象の線形減衰係数を正確に再構成するために必要となる。別の例としては、所望のターゲット画像が単一の点でのみ構成されていることが分かっている場合には、その点で交差する、二つの直交する投影のみが、画像点を再構成するために必要となる。したがって、所望のターゲット画像がスパース的に分配された(sparsely distributed)点のセットであるなどの所望のターゲット画像に関する事前情報が分かっていれば、取得されたデータのセットがナイキスト基準を満たしていなくとも、そのデータのセットから画像を再構成することができる。より一般的に言い換えると、所望のターゲット画像のスパース性(sparsity)に関する情報を用いることでナイキスト基準を緩和することができる。しかしながら、そのような議論を一般化して厳密な画像再構成理論を定式化することは非常に重要な課題である。
【0021】
ナイキスト基準は情報科学の分野において最も重要な基礎の一つである。しかしながら、ナイキスト基準は、磁気共鳴撮像(MRI)やX線コンピュータ断層撮影(CT)などの現代の医療用撮像手段においても極めて重要な役割を果たす。撮像システムにより取得されたデータサンプルの数がナイキスト基準における要求よりも少ない場合、再構成画像にはアーチファクトが生じる。一般的には、そのような画像アーチファクトにはエイリアシング及びストリーキングアーチファクトが含まれる。実際には、意図的に又は避けられない状況により、ナイキスト基準はしばしば破られる。例えば、時間分解MR血管造影の研究においては、データ取得時間を短縮するためにアンダーサンプル投影再構成取得法又は放射線状取得法がしばしば意図的に用いられる。
【0022】
近年、「圧縮センシング」(CS)と呼ばれる画像再構成のための新しい数学的フレームワークが定式化された。圧縮センシングにおいては、スパースな画像に対する線形投影の小さなセットのみで良質な画像が再構成される。CSの理論は、E. Candes、J. Romberg、及びT. Taoによる「ロバスト不確定性原理:不完全性の高い周波数情報からの厳密な信号再構成」、IEEE Transactions on Information Theory 2006;52:489〜509ページ、及び、D. Donohoによる「圧縮センシング」、IEEE Transactions on Information Theory 2006;52:1289〜1306ページに記載されており、また、例えば米国特許出願番号第11/199,675号に開示されている。
【0023】
CSの数学的フレームワークは簡潔ではあるが、医用撮像分野への再構成法の適用性は、スパースな医用画像に大きく依存する。残念ながら、医用画像はしばしば一般的な画素表現においてスパースでない。それにもかかわらず、画像をスパース化するために、単一の画像に対して数学的変換を行うことができる。そのような変換は「スパース化変換(sparsifying transforms)」と呼ばれる。具体的には、スパース化変換、Ψ、が与えられた場合、CS画像再構成は次の目的関数を最小化することにより実施される。
【0024】
【数2】
【0025】
上式は以下を満たす。
【0026】
【数3】
【0027】
上記の目的関数において、Iは所望の画像を表すベクトルであり、Yは撮像システムにより取得されるデータを表すベクトルであり、Aは測定結果を記述するシステム行列である。
【0028】
また、以下を満たす。
【数4】
【0029】
上式は、N次元ベクトルxのL1ノルムと呼ばれる。即ち、CS画像再構成により、スパース化された画像のL1ノルムを最小化する画像が、物理的測定値AI=Yを満たす全ての画像において決定される。
【0030】
圧縮センシング画像再構成理論の基本的な考え方をまとめると次のようになる。即ち、画素表現における所望の画像を直接再構成する代わりに、所望の画像のスパース化されたバージョンが再構成される。スパース化された画像においては、実質的により少ない画像画素が重要な画像価値を有する。したがって、アンダーサンプルされたデータセットからスパース化された画像を再構成することが可能となる。スパース化された所望の画像が再構成されると、「逆スパース化変換」を用いて前記スパース化された画像が変換されて所望の画像に戻される。実際には、「逆」スパース化変換は明確なフォームを有する必要はない。実際、スパース化変換のみが画像再構成において必要とされる。
【発明の概要】
【0031】
本発明によれば、X線コンピュータ断層撮影(CT)、X線C−arm撮像、及び磁気共鳴撮像(MRI)、陽電子放出型断層撮影(PET)、及びシングルフォトン放出型コンピュータ断層撮影(SPECT)などの数々の異なる撮像手段に適用可能な画像再構成法が提供される。より詳細には、本発明によれば、画像再構成プロセスの中に対象の適切な事前情報を盛り込むことにより信号ノイズ比(SNR)が向上した、正確な再構成における様々なメリットを組み合わせた画像再構成法が提供される。向上したSNRに加え、与えられた所望の画像及び与えられた投影の数について、従来の圧縮センシング(CS)などの画像再構成法では成し得なかった正確な画像再構成が、本発明の方法により達成される。
【0032】
本発明の一側面によれば、対応する画像データが取得される際の時間解像度よりも高い時間解像度を示す画像の時系列画像を作成する方法が提供される。例えば、本発明により、高い時間分解能を有する心臓の撮像の方法が提供される。心臓CTにおいては、低速ガントリー回転データ取得が用いられる。より詳細には、心臓CT血管造影法及び心臓機能の測定における診断の正確性を顕著に向上させる高い時間分解能を達成することが可能となる。さらに、一回の息止め中に低速ガントリー回転を用いることにより、ビュー角の同期の問題が大幅に改善される。高い時間分解能はMR撮像応用においても実現可能である。
【0033】
本発明の別の側面によれば、高速ガントリー回転データ取得システムを用いた、従来の多検出器型CT(MDCT)スキャナにおいて時間分解能を向上させるための、根本的に異なる方法が提供される。より詳細には、フィルタ補正逆投影画像再構成における、心拍ゲーティングウィンドウなどのゲーティングウィンドウが、複数のサブウィンドウまたは「時間ウィンドウ」に分割される。本発明は、各サブウィンドウからのデータを用いて画像を再構成する方法を提供する。時間分解能を向上させるこの方法は、低速ガントリー回転CT撮像及びMR撮像応用においても実現可能である。
【0034】
本発明の別の側面によれば、ガントリー角を同期させることが不要とされる個別の投影が異なる心拍フェーズにセグメント化されるような根本的に異なるセグメント化された取得、又は、適切な心拍フェーズを用いるその他のデータ取得が、提供される。このようにして、セグメント化された取得の時間分解能を向上させて良質な画質を実現することができる。例えば、従来の多検出器型CT(MDCT)においては、不整脈によりデータギャップ及び異なるセクター間のオーバーラップが生じる。しかしながら、本発明の実施においては、不整脈は、各心拍フェーズにおける高度にアンダーサンプルされたデータセットの不均一な分布しか引き起こさない。このことは、用いられる特定の撮像手段に依存することなく、事実である。この不均一性は、本発明により再構成される画像に大きく影響することはない。
【0035】
本発明の別の側面によれば、患者の心拍数に制限されることのない心臓撮像における正確な画像再構成が提供される。通常、患者の心拍数が高いほど、各心拍フェーズにおいてより多くの取得された撮像が得られる。これにより、本発明の画像再構成法を用いて画質の向上を実現することができる。とりわけ、直接の医用重要性は、本発明の方法の実施にはベータブロッカーが不要であるという点である。
【0036】
本発明の別の側面によれば、カテーテルベースの介入手順中に用いられるものと同じ撮像システムを用いて、時間分解四次元心臓「ロードマップ」を作成することを提供する。これにより、介入手順中の長たらしい3Dから2Dへの画像レジストレーションの必要性が緩和される。このことは、撮像システムのスペース及び電源の配分の観点、さらに、より多くの患者を確実に診断し治療することができるとの観点から、病院側にとって有益となる。
【0037】
本発明の前述した側面及びその他の側面及び利点は、以下の記載の中で述べられる。本明細書においては、本明細書の一部を構成する添付された図面について記載され、図面の記載は本発明の好ましい実施形態である。しかしながらそのような実施形態は本発明の全ての範囲を表すものではなく、したがって本発明の範囲は請求の範囲及び本明細書の中に記載する。
【図面の簡単な説明】
【0038】
【図1】画像再構成プロセスにおける従来の逆投影ステップの図的記述である。
【図2】(a)はMRIシステムを用いた典型的なフーリエ又はスピンラップ画像取得中にk空間がサンプルされることを示す図解である。(b)はMRIシステムを用いた典型的な投影再構成画像取得中にk空間がサンプルされることを示す図解である。
【図3】本発明の画像再構成法の実施形態のフローチャートである。
【図4】本発明の画像再構成法の別の実施形態のフローチャートである。
【図5】本発明の画像再構成法のさらに別の実施形態のフローチャートである。
【図6】(a)はX線コンピュータ断層撮影(CT)撮像システムの図的記述である。(b)は図6(a)のCT撮像システムのブロックダイアグラムである。
【図7】(a)は図6(a)のCTシステムで用いられた本発明の実施形態のフローチャートである。(b)は図6(a)のCTシステムで用いられた本発明の別の実施形態のフローチャートである。
【図8】は心電図(ECG)信号の例の図解である。
【図9】(a)は本発明を用いるC−armX線システムの図的記述である。(b)は図9(a)のC−armX線システムのブロックダイアグラムである。
【図10】(a)は図9(a)のC−armX線システムのX線源及び検出器の図的記述である。(b)は図9(a)のC−armX線システムにより用いられるC−armスキャン経路の図的記述である。
【図11】図9(a)のC−armX線撮像システムにより実行されるスキャンにおける、本発明の別の実施形態のフローチャートである。
【図12】本発明の実施に用いられる磁気共鳴撮像(MRI)システムのブロックダイアグラムである。
【図13】本発明の一実施形態を実施するための、図12のMRIシステムに用いられるパルスシーケンスである。
【図14】図13のパルスシーケンスを用いてサンプルされるk空間データの図的表現である。
【図15】図11のパルスシーケンスを用いる、図10のMRIシステムに用いられる本発明の別の実施形態のフローチャートである。
【図16】インターリーブされた投影ビューの図的表現である。
【図17】陽電子放出型断層撮影(PET)撮像システムのブロックダイアグラムである。
【図18】図17の陽電子放出型断層撮影(PET)撮像システムの別の実施形態のフローチャートである。
【発明を実施するための形態】
【0039】
一般的に、データのセットから画像を再構成する方法には、測定されたデータサンプル、Y、から所望の画像、I、を見積るための数々のステップが含まれる。より詳細には、画像再構成は次の一貫性の条件を満たすべきである。
【0040】
【数5】
【0041】
上式において、Aはシステム行列である。一般的に、システム行列Aは所望の画像Iを取得されたデータサンプルYに関連付ける前進射影演算子(forward projection operator)とみなすことができる。コンピュータ断層撮影(CT)撮像を扱う場合、システム行列は再射影演算を含むことができ、一方で、磁気共鳴撮像(MRI)においては、システム行列はフーリエ変換演算を含むことができる。上式(1)の一貫性の条件は、言い換えると、画像が正確に再構成されたときに、測定された投影データの正しい見積もりを作成するために、前進射影演算子が実際のデータ取得過程を実質的に再現することを表している。
【0042】
本発明の方法は、良質な所望の画像を再構成する方法を提供する。通常、圧縮センシング(CS)の原理を利用した繰り返し画像再構成法を制限するために、「先験的画像」が用いられる。例えば、CSにおいて通常用いられるスパース化変換に加え、所望の画像から先験的画像を差し引くことにより、画像はさらにスパース化される。その結果、CS法で要求されるサンプルの数よりも実質的に少ないサンプルの数を用いて画像を正確に再構成することができる。
【0043】
より詳細には、先験的画像Ip及び再構成される所望の画像Iが与えられた時、画像再構成のための本発明の方法は次の目的関数を最小化することにより実行される。
【0044】
【数6】
【0045】
ここで、Ψ1及びΨ2はスパース化変換であり、
【数7】
はL1ノルム演算であり、αは上式(2)の目的関数の二つの項の相対的な重みを調節するために用いられる正規化パラメータ(regularization parameter)である。上述したとおり、以下の式が与えられる。
【0046】
【数8】
【0047】
上式は、N次元ベクトルxのL1ノルムを示す。より一般的には、所望の画像の適切な画質を維持しながら真のL1ノルムを変更することが可能である。例えば、式(2)の目的関数は、以下のように一般化することができる。
【0048】
【数9】
【0049】
ここで、
【数10】
は、Lpノルム演算を示し、以下のように表わされる。
【0050】
【数11】
【0051】
上述したとおり、好ましくはp=1.0であるものの、pは異なる値であってもよい。pの値がp=1.0から逸脱するほど、通常、再構成された所望の画像の品質が低下するということは、当業者に理解される。
【0052】
式(2)のスパース化変換、Ψ1及びΨ2は、通常は異なるものの、同じスパース化変換であってもよい。スパース化変換には、例えば、ウェーブレット変換、一次階差(first order finite difference)、二次階差(second order finite difference)、及び、例えば次式で表わされる離散グラデーション変換(discrete gradient transform)▽m,nなどの離散グラデーション変換が含まれる。
【0053】
【数12】
【0054】
ここで、指数m及びnは画像I内の画素の位置を示す。▽m,nI(m,n)で特定される画像は通常「勾配画像」と呼ばれる。
【0055】
式(2)の目的関数内の項は両方とも重要である。それらの重要性により、正規化パラメータαの選択により画像再構成処理全体が調節される。したがって、正規化パラメータαの選択は先験的画像Ipの選択に依存すると共に目の前の臨床における応用に依存する。例えば、式(2)の目的関数内の二番目の項、
【数13】
は、先験的画像Ipから潜在的に受け継がれたストリーキングアーチファクトを軽減する。さらなる例として、心臓の撮像における応用においては、正規化パラメータをα≒0.3〜0.7と選択すれば通常十分である。
【0056】
式(1)の一貫性の条件を、全体的な画像再構成により良く盛り込むために、ラグランジュの乗数法を利用する。そのようにして、上記一貫性の条件を用いて式(2)で定められた目的関数の最小化にさらなる制限を追加する。新しい目的関数は、したがって、以下の様な形となる。
【0057】
【数14】
【0058】
ここで、λはラグランジュ乗数であり、Xは差分行列であり、
【数15】
はL2ノルム演算の二乗であって、N次元ベクトルxについては以下のように表わされる。
【0059】
【数16】
【0060】
式(3)の差分行列は、式(1)の一貫性の条件を用いて以下のように表される。
【0061】
【数17】
【0062】
ラグランジュ乗数λは、本発明を実施する際に用いられる特定の撮像システムについて経験的に定められる。例えば、ラグランジュ乗数λは、所望のデータ一貫性要求と先験的画像Ipとの類似点との間のトレードオフにより決定される。大きなラグランジュ乗数λが選択された場合、再構成された画像のノイズ分散は小さくなる。しかしながら、これは、先験的画像の高い空間分解能特性の損失として達成された可能性がある。同様に、より小さなラグランジュ乗数λが用いられた場合には、先験的画像の高い空間分解能特性は良く維持されるものの、所望の画像におけるノイズ分散は高くなる可能性がある。そのような状態は、用いられる撮像システムにより達成され得るコントラスト対ノイズ比に影響を及ぼす。
【0063】
式(3)に示される目的関数は、撮像システムのノイズを考慮する目的でさらに変更することができる。そのようにして、次の目的関数が最小化される。
【0064】
【数18】
【0065】
ここで、XTは差分行列Xの転置であり、Dはシステムノイズ行列(system noise matrix)であって次式で決定される行列要素を有する対角行列である。
【0066】
【数19】
【0067】
ここで、σn2はノイズ分散であって本発明を実施する際に用いられる撮像システムにおけるノイズを示すパラメータである。例えば、X線撮像システムにおいては、ノイズパラメータσn2はn番目のX線検出器に関連するノイズ分散である。あるいは、MR撮像システムにおいては、ノイズパラメータσn2はn番目の受信コイルにおいて見積もられるノイズ分散である。
【0068】
本発明の方法においては、先験的画像Ipは二つの役割を果たす。第一に、全体的な画像再構成を加速する、繰り返し再構成における種画像(seed image)としての役割を果たす。さらに、前記先験的画像Ipは、所望の画像Iをさらにスパース化させるために用いられ、したがって別のスパース化変換としての役割を果たす。可能な先験的画像Ipについての簡単な議論を、異なる撮像手段を参照して以下に述べる。しかしながら、臨床における応用に依っては以下に特に記載されるもの以外の先験的画像Ipを用いることができることは、当業者には明らかであろう。本明細書に記載されるように、先験的画像Ipは、再構成される所望の画像を示す先験的情報が含まれた対象の画像である。先験的画像Ipは、これまで実施されてきた撮像研究から再構成され、又は、所望の画像のために取得された画像データと同じセッションにおいて取得された画像データから再構成される。通常、先験的画像Ipは、所望の画像と同じ撮像手段を用いて取得され、ここで、先験的画像Ipは所望の画像とは異なる撮像手段から得られる。
【0069】
図3を参照すると、本発明の方法の一実施は、式(2)の目的関数を用いて、ステップ300で示されるように、正規化パラメータαを初期化することから始める。正規化パラメータαを選択することにより、所望の画像のスパース性と先験的画像の所望の画像への影響間のトレードオフが決定される。したがって、正規化パラメータαの値は、目の前の臨床における応用に依って変化する。例えば、心臓撮像への応用においては、通常α≒0.3〜0.7の値で十分である。続いて、ステップ302及び304に示されるように、式(2)の目的関数における一番目と二番目の項がそれぞれ初期化される。一番目の項、
【0070】
【数20】
の初期化は、ステップ306で始まり、ここで、先験的画像Ipが所望の画像の見積り即ち「見積り画像」から差し引かれ、「差分画像」が作成される。通常、見積り画像は、所望の画像の強度の適切な近似である。先験的画像Ip及び所望の画像の見積りIの具体的な選択は、撮像手段及び具体的な臨床における応用に依存する。したがって、これらの選択の別の選択肢について以下で詳細に議論する。続いて、ステップ308に示されるように、スパース化変換Ψ1を用いることによって差分画像がスパース化される。上記のとおり、スパース化変換Ψ1は、ウェーブレット変換、一次階差、二次階差、及び、離散グラデーション変換を含む、数学的演算のどの様な数でも良い。このスパース化された差分画像のL1ノルムがその後ステップ310で算出される。その後、ステップ312で、この処理の結果が正規化パラメータαによって重み付けされる。
【0071】
式(2)の目的関数の二番目の項、
【数21】
の初期化は、ステップ314で始まり、ここで、所望の画像Iの見積りがスパース化変換Ψ2を用いることでスパース化される。続いて、このスパース化された所望の画像見積りのL1ノルムがステップ316で算出される。スパース化変換Ψ2として離散グラデーション変換▽m,nが選択された場合、ステップ314及び316は所望の画像見積りの合計変化、TV、の算出としてみることができ、これは以下のように表わされる。
【0072】
【数22】
【0073】
スパース化された所望の画像見積りのL1ノルムが算出されると、ステップ318において、その結果が(1−α)により重み付けされる。続いてステップ320で、前記一番目の項と二番目の項を足し合わせることにより、式(2)の目的関数が作成される。この目的関数は、その後ステップ322で例えば非線形共役勾配法を用いて最小化される。この最小化処理は停止基準が満たされるまで続く。停止基準としては、例えば、現時点の所望の画像の見積りを前回の繰り返しからの所望の画像の見積りと比較することが挙げられる。そのような停止基準は以下のように表わされる。
【0074】
【数23】
【0075】
ここで、Iij(k+1)は画素位置(i,j)における(k+1)番目の所望の画像の見積りの値であり、Iij(k)は画素位置(i,j)におけるk番目の所望の画像の見積りの値である。
【0076】
図4を参照すると、本発明の方法の別の実施は、ステップ400で示されるように、式(3)の目的関数を用いてまず正規化パラメータαを初期化することから始める。続いて、ステップ402及び404に示されるように、式(3)の目的関数における一番目と二番目の項がそれぞれ初期化される。この処理は上記の図3のステップ302及び304と同じように実施される。しかしながら、ここでは、式(1)の一貫性の条件が三番目の項、
【数24】
に盛り込まれ、これは、ステップ406で初期化される。まず、ステップ408で差分行列Xが作成される。上で詳細に述べたように、差分行列Xは式(1)の一貫性の条件に対応するとともに次のように表わされる。
【0077】
【数25】
【0078】
したがって、システム行列Aを所望の画像の見積りIに適用し、続いて所望の画像に対応する取得された画像データYを差し引くことにより、差分行列が決定される。差分行列XのL2ノルムの二乗が、次のステップ410で算出される。差分行列XのL2ノルムの二乗が算出された後、ラグランジュ乗数λが決定され、これが、ステップ412で差分行列Xに重みを付けるために用いられる。上記のとおり、ラグランジュ乗数は、経験的に決定されるとともに目の前の臨床における応用に基づいてユーザにより選択される値である。続いてステップ420で、一番目、二番目、三番目の項を足し合わせることにより、式(3)の目的関数が作成される。この目的関数は、その後ステップ422で例えば非線形共役勾配法を用いて最小化される。この最小化処理は、上記のとおり、停止基準が満たされるまで続く。
【0079】
図5を参照すると、本発明の方法の別の実施は、ステップ500で示されるように、式(4)の目的関数を用いてまず正規化パラメータαを初期化することから始める。続いて、ステップ502及び504に示されるように、式(4)の目的関数における一番目と二番目の項がそれぞれ初期化される。この処理は上記の図3のステップ302及び304と同じように実施される。しかしながら、ここでは、式(1)の一貫性の条件及び撮像システムにおけるノイズの影響が、三番目の項、λ(XTDX)に盛り込まれ、この項はステップ506で初期化される。まず、上記の図4のステップ408と同様に、ステップ508で差分行列Xが作成される次に、システムノイズ行列Dがステップ510で作成される。システムノイズ行列Dは、次式で決定される行列要素を有する対角行列である。
【0080】
【数26】
【0081】
ここで、σn2は、ノイズ変化であり、本発明を実施する際に用いられる撮像システムにおけるノイズを示すパラメータである。例えば、X線撮像システムにおいては、ノイズパラメータσn2はn番目のX線検出器に関連するノイズ変化である。あるいは、MR撮像システムにおいては、ノイズパラメータσn2はn番目の受信コイルのノイズ変化である。
【0082】
σnは、本発明を実施する際に用いられる撮像システムにおけるノイズを示すノイズパラメータである。例えば、X線撮像システムにおいては、ノイズパラメータσnはn番目のX線検出器に関連するノイズである。システムノイズ行列Dが作成された後に、次の行列乗法が実施される。
【0083】
【数27】
【0084】
この行列乗法はステップ512で実施される。続いてステップ514で、ラグランジュ乗数よりこの演算の結果が見積もられる。続いてステップ520で、一番目、二番目、三番目の項を足し合わせることにより式(4)の目的関数が作成される。この目的関数は、その後ステップ522で例えば非線形共役勾配法を用いて最小化される。この最小化処理は、上記のとおり、停止基準が満たされるまで続く。
【0085】
本発明は、上記したように、多くの異なる医用撮像手段に適用され得るとともに、多くの異なる臨床における応用に利用され得る。そのような臨床における応用の例のいくつかが、本発明の広い範囲を描写するために以下に記載される。しかしながら、それらの実施形態は必ずしも本発明の全ての範囲を表すものではなく、本発明の範囲を説明するために請求の範囲及び本明細書が参照される。
【0086】
X線コンピュータ断層撮影
X線コンピュータ断層撮影(CT)及び核医学心筋血流撮像(MPI)を含む医用撮像において用いられるイオン化放射線への被ばくに関するリスクは、近年、CT及び核医学MPIの研究の顕著な増加とともに、非常に大きな課題となっている。心臓CT血管造影セッションからの影響のある放射線量は、弾性の患者において約5〜20mSv、女性の患者においてはそれ以上と報告されている。この放射線量は、静脈内への造影剤注入の前にルーチン的に行われるカルシウム評価CTスキャンからの前記放射線量よりも小さな放射線量に加えての量である。CT−MPIを広範囲な心臓CT研究の一部として実施するためには、約20〜30回、心臓の同じ領域にわたって画像を取得することが必要とされ、結果として放射線量が約二十倍から三十倍の増加となり、これは放射線被ばくの許容範囲を超えるレベルとなる。
【0087】
現在の心臓血管CT撮像においては、さらに重要な制限がある。特に、現在の心臓CT撮像方法は、患者のサブセットの全てにおいて良質な心臓の画像を提供するには不適切な時間分解能が問題となる。したがって、CT心臓血管撮像を用いて時間分解能を向上させることにより、より正確な診断が可能となり、さらに、安全でより効果的な治療介入が可能となり得る。
【0088】
X線多検出器コンピュータ断層撮影
現在の最新式多検出器型CT(MDCT)撮像システムのガントリー回転時間が短いにもかかわらず、時間的開口は、グローバル機能(放出(ejection)機能)の正確な測定こと、壁運動異常の評価、又は弁異常を評価するための弁運動の停止には不適切である。通常、グローバル機能及び局所的な壁運動異常を正確に評価するには、時間的開口が40〜50ミリ秒以下とされるべきである。さらに、現在の短いガントリー回転時間にもかかわらず、動きアーチファクトのない画像を取得する目的で心拍数を充分に遅くするために、薬理学的介入(例えばベータブロッカーの導入)がしばしば必要とされる。このことから、心臓刺激伝導障害やぜんそくなどの肺疾患を持つ患者にはベータブロッカーが禁忌であることから、上記のような方法の使用においては制限があるということが示される。これらは心臓CT血管造影の幅広い実施の追加の障害となる。
【0089】
MDCTにおいては、時間分解能は主にガントリー回転速度により制限される。画像を正確に再構成するためには、典型的には180度以上の角度範囲にわたって投影データが取得される。この角度範囲は、完全な円の約三分の二をカバーする。用いられる画像再構成アルゴリズム中の適切な重み付けが組み込まれると、MDCTの典型的な時間的開口は完全な回転に対してガントリー回転時間の50パーセントに制限される。最新式MDCTスキャナにおける時間分解能及び対応するガントリー回転速度を、以下で表1にまとめた。
【0090】
【表1】
【0091】
心臓MDCT撮像においては、時間分解能20ms以上を実現するためには、ガントリー回転周期約50ミリ秒が必要とされるが、これは現時点ではCT撮像システム上の機械的な制限により実現可能ではない。ガントリー速度が制限されていることから、セグメント化された再構成が時間分解能を向上させるため研究されている。セグメント化された再構成においては、単一の再構成に必要とされるデータカバー範囲は、同一の心拍フェーズにおける異なる心拍から選択された投影データで満たされている。セグメント化された再構成を用いることにより、時間分解能を向上させることができ得る。
【0092】
最良のシナリオにおいては、時間分解能をN倍向上させることができる(Nは用いられるセクターの数)。しかしながら、セグメント化された再構成は、一サイクルから次のサイクルへの心臓の動きの一貫性に大きく依存する。ガントリーは一回の心臓の鼓動の間に何度も回転することに注意されたい。セグメント化された再構成において心臓の鼓動が複数必要とされる場合、投影データが多くのガントリー回転にわたって分散される。したがって、ガントリー回転と心臓の鼓動との間の同期が可能なことから、異なる心拍から選択されるセグメントは、ショートスキャンデータセットを作成するために、しばしば結合されない。したがって、セグメント化されたデータセットの結合は、正確な画像再構成のための完全な投影データセットを提供しない。その結果、セグメント化された再構成における時間分解能向上が確実に達成されることはなく、したがって、セグメント化された再構成法が臨床診療で用いられるのはまれである。
【0093】
X線コンピュータ断層撮影撮像システム
図6(a)及び図6(b)をまず参照すると、X線コンピュータ断層撮影(CT)撮像システム610は、「第三世代」CTスキャナであるガントリー612を有する。ガントリー612には、X線614のファンビーム又はコーンビームをガントリーの反対側の検出器配列616へ向けて照射するX線源613が設けられている。検出器配列616は、患者615を通過する照射されたX線を感知する、複数の検出器要素618から形成される。各検出器要素618は、作用しているX線ビームの強度を示す電気信号、即ち患者を通過するにつれ減衰するビームを示す電気信号を生成する。X線投影データを取得するためのスキャン中、ガントリー612及びそこに取り付けられた構成要素が患者615内に位置する回転中心619の周りに回転する。
【0094】
ガントリーの回転及びX線源613の操作は、CTシステムの制御機構620により制御される。制御システム620には、X線源613に電力及びタイミング信号を与えるX線コントローラ622と、ガントリー612の回転速度及び位置を制御するガントリーモータコントローラ623とが設けられている。制御機構620内のデータ取得システム(DAS)624により、検出器要素618からアナログデータがサンプルされるとともに該データが後続の処理のためにデジタル信号に変換される。画像再構成装置625はサンプルされデジタル化されたX線データをDAS624から受信し、高速画像再構成を実行する。再構成された画像は、画像を大容量記憶装置628に保存するコンピュータ626に入力される。
【0095】
コンピュータ626はまた、オペレーターから、キーボードを有するコンソール630を介して、命令及びスキャニングパラメータを受信する。関連するディスプレイ632により、オペレーターは、コンピュータ626から、再構成された画像及びその他のデータを観察することができる。オペレーターにより与えられた命令及びパラメータはコンピュータ626により用いられて、DAS624、X線コントローラ626、ガントリーモータコントローラ623に制御信号及び情報が提供される。さらに、コンピュータ626によりテーブルモータコントローラ634が操作され、これによりモータで動くテーブル636が制御されて患者615をガントリー615内に配置する。
【0096】
X線コンピュータ断層撮影画像再構成
特に図7(a)を参照すると、心臓X線CT撮像システムにおいて実施された場合、本発明の方法は、対象の心臓の生理的動作を示す信号を取得することから始める。例えば、ステップ700で示されるように、対象からの心電図(ECG)信号の取得が初期化される。このECG信号は、取得された画像データをMこの異なる心拍フェーズPMにレトロスペクティブにゲート(gate)するために用いられる。例えば、図8を参照すると、3つの心拍フェーズP1,P2及びP3を、ECG信号800内の時間点から選択することができる。この例においては、第一心拍フェーズP1が、P波802の最後において等容性収縮フェーズ中として選択され、第二心拍フェーズP2が、QRS群804のピークにおいて速い駆出フェーズの始まりとして選択され、そして、第三心拍フェーズP3が、T波806の始まりにおいて減少した駆出フェーズの始まりとして選択される。通常、心拍フェーズの数はいくつ選択されてもよく、そして、ECG信号内の何れの時間点から選択されても良い。
【0097】
再び図7(a)を参照すると、ステップ702に示されるとおり、第一ビュー角θnにおいて投影ビューのセットの形で画像を取得することからデータ取得が始まる。ガントリーは続いてステップ400において新しいビュー角へと回転される。続いて、より多くの画像データが新しいビュー角θn+1において取得され、このプロセスは、決定ブロック706に示されるように、ガントリーが最後のビュー角θNまで回転されるまで繰り返される。全ての所望の画像データが取得されると、ステップ708に示されるように、ECG信号の取得が停止する。取得された画像は、続いて、ステップ710において、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。例えば、再び図8を参照すると、第一ゲーティングウィンドウW1中に取得された画像データの全てが、第一心拍フェーズP1に対応するものとして選択される。例えば、ゲーティングウィンドウ内に実質的に一つのビュー角しか存在しないように、20ミリ秒以下の狭いゲーティングウィンドウW1が用いられる。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズのそれぞれについての「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットには、与えられる心拍フェーズPmに対応するゲーティングウィンドウWm中に取得された複数の投影ビューが含まれる。あるいは、ECG信号中の特定の時間点においてのみ画像データが取得さるように、オリジナルの画像データの取得がプロスベクティブにゲートされる。このデータ取得スキームにしたがって、選択された心拍フェーズ中に取得された画像データの全てが、同様にして心拍フェーズ画像データセットとして結合される。
【0098】
各心拍フェーズ画像データセットは高度にアンダーサンプルされるため、周知のフィルタ補正逆投影(FBP)法などのスタンダードな画像再構成アルゴリズムを用いて画像を再構成する試みは、深刻なストリーキングアーチファクトを生ずる結果となる。したがって、再度図7(a)を参照すると、本発明の方法は、ステップ712で示されるように、先験的画像Ipを再構成することにより開始する。先験的画像Ipはステップ712においてFBP法などの従来の画像再構成法を用いて再構成される。特に、先験的画像Ipは、N個のビュー角θnにわたって取得される画像データの全てから再構成される。そのような先験的画像は、画像データが複数の異なる心拍フェーズにわたって取得されたことから、鼓動する心臓に関連する力学的情報を本質的に失うものの、この力学的情報は、各心拍位相の所望の画像を再構成する際に復元することができる。しかしながら、あるいは、例えば、同時係属の米国特許出願第11/482,372号に記載の高度に制限された逆投影(HYPR)、同時係属の米国特許出願第12/032,240号に記載のHYPR局所再構成(HYPR−LR)、及び同時係属の米国特許出願第12/032,262号に記載の繰り返しHYPR(I−HYPR)などの、その他の画像再構成法を用いて先験的画像Ipを再構成することができる。HYPR−LR法を用いることにより、例えば、所望の画像における信号ノイズ比(SNR)をさらに向上させることが可能である。
【0099】
画像再構成法を進行させると、与えられた心拍フェーズPmにおける所望の画像の見積りが、続いてステップ714で作成される。例えば、この見積りは、適切な心拍フェーズ画像データセットからFBP法を用いて再構成された画像である。あるいは、しかしながら、先験的画像Ipを用いることもできる。選択された心拍フェーズPmの所望の画像Iは、続いて図3、4及び5を参照して記載された上記の本発明の方法にしたがって、ステップ716に示されるように、再構成される。先験的画像Ipが良質の画像でないことから、先験的画像Ipの低品質による影響を軽減させるために、正規化パラメータαが選択される。例えば、値α≒0.3〜0.7が用いられる。このようにして、プロセスブロック718で決定されるように、所望の心拍フェーズの全てについての画像が再構成されるまで、所望の画像Iが各心拍フェーズPmについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ720において次の心拍フェーズPmを選択して、画像再構成法を進行する。
【0100】
上記のデータ取得スキームの例として、X線CT画像データが一回のガントリー回転内及び約12秒の息止め中で取得される。心拍数の平均が毎分75回(bpm)である患者においては、そのような画像データが15回の鼓動にわたって取得される。したがって、取得された画像データは前記15回の鼓動及び一回のガントリー回転にわたって広がる。この取得された画像データはその後異なる心拍フェーズにレトロスペクティブにゲートされる。例えば、ゲーティングウィンドウ内に実質的に一つのビュー角のみが存在するよう、20ミリ秒以下の狭いゲーティングウィンドウが用いられる。したがって、ゲーティング後、各心拍フェーズには約15個のビュー角のみが含まれる。高速ガントリー回転速度の代わりに、本発明は、実質的に低下したガントリー回転速度を用いて取得されたデータから良質の画像を再構成する方法を提供する。上記のようにして本発明を実施する場合、時間分解能はガントリー回転速度によって決定されるのではない。その代わり、時間分解能は、一つのコーンビーム投影の取得のための時間ウィンドウにより決定され、各コーンビーム投影の検出器の読み取り速度により決定される。
【0101】
上記のX線コンピュータ断層撮影画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが当業者にとって明らかとなる。例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。したがって、通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。
【0102】
X線多検出器型コンピュータ断層撮影画像再構成
本発明の方法は、低速ガントリー回転速度を用いて取得された画像データから高い時間解像度の画像が再構成される状況のみでなく、高速ガントリー回転速度が用いられる状況でも適用可能である。このようにして、本発明により、最新式X線多検出器コンピュータ断層撮影(MDCT)撮像システムの時間分解能が増加する。図7(b)を参照すると、X線MDCT撮像システムで実施される場合、本発明の方法は、ステップ750に示されるように、対象の心電図(ECG)信号を取得することから始まる。このECG信号は、取得された画像データをM個の異なる心拍フェーズPMにレトロスペクティブにゲートするために用いられる。
【0103】
データ取得は、続いて、ステップ752に示されるように、第一ビュー角θnにおける投影ビューのセットの形で、画像データを取得することから始まる。ガントリーは続いてステップ754で新しいビュー角へと回転される。新しいビュー角θn+1においてより多くの画像データが取得され、そして、このプロセスは、決定ブロック756で決定されるように、ガントリーが最後のビュー角θNへと回転されるまで繰り返される。所望の画像の全てが取得されると、ステップ758で示されるように、ECG信号の取得が停止される。取得された画像データは、続いて、ステップ760で、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。例えば、再度図8を参照すると、第一ゲーティングウィンドウW1中に取得された画像データの全てが、第一心拍フェーズP1に対応するように選択される。例えば、最新式のMDCT撮像システムにおいては、150ミリ秒以下のゲーティングウィンドウW1が用いられる。そのようなゲーティングウィンドウは、例えば、いわゆるショートスキャン角度範囲と呼ばれる約240度(180度足すファン角)の角度範囲にわたってX線管が移動する継続時間に対応する結果となる。したがって、ゲートウィンドウ内にはN≒640個のビュー角が存在する。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズのそれぞれについて、「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットには、与えられた心拍フェーズPmに対応するゲーティングウィンドウWm中に取得される複数の投影ビューが含まれる。あるいは、画像データがECG信号中の特定の時間点においてのみ取得されるように、オリジナルの画像データ取得がプロスペクティブにゲートされる。このデータ取得スキームに従うと、選択された心拍フェーズ中に取得される画像データの全てが、沿うようにして、心拍フェーズ画像データセットとして結合される。
【0104】
各心拍フェーズ画像データセット(240度の角度範囲及び640個の投影ビュー角)が正確な画像再構成のため充分にサンプルされることから、スタンダードな画像再構成法、例えば周知のフィルタ補正逆投影(FBP)法が用いられて画像が再構成される。しかしながら、制限された心拍ウィンドウ幅W1に起因して、再構成された画像の時間解像度は、ガントリー回転時間の約半分に制限される。この事実は、上記の表1に示される時間分解能値の根本にある原因である。したがって、ガントリー回転速度を変更することなく時間分解能を何倍にも増加させるように、本発明が実施される。特に、再び図7(b)を参照すると、本発明の方法は、ステップ762に示されるように、先験的画像Ipを再構成することから開始する。先験的画像Ipはステップ762においてFBP法などの従来の画像再構成法を用いて再構成される。特に、先験的画像Ipは、ゲーティングウィンドウW1内でN個のビュー角θnにわたって取得される画像データの全てから再構成される。
【0105】
幅W1を有する通常のゲーティングウィンドウは、その後、各々が幅W1/Lを有する合計L個のより狭いサブウィンドウ又は「時間ウィンドウ」に分割され、そして、ステップ764で示されるように、心拍フェーズ画像データセットはこれらのサブウィンドウを用いてさらにゲートされる。例えば、ゲーティングウィンドウW1が2、3、又は4個の同等のセクションにそれぞれ分割されるように、Lの値を、2、3、又は4となるように選択することができる。さらに、これらの値は、時間分解能の、2、3、又は4倍の増加に対応する。各サブウィンドウについて、投影ビュー角範囲は、L倍減少する。例えば、通常の心拍ウィンドウ幅に対応する典型的な角度範囲は、約240度である。しかしながら、ゲーティングウィンドウを2つのサブウィンドウに分割すると、各サブ分割された心拍フェーズ画像データセット、又は「心拍サブフェーズ」画像データセットにおける角度範囲は120度となる。したがって、心拍サブフェーズ画像データセットから心拍画像を正確に再構成するためにFBPなどの従来の画像再構成法を用いることはできない。したがって、L個の心拍サブウィンドウについて心拍画像を正確に再構成するために、本発明が適用される。
【0106】
画像再構成法を進めると、ステップ766において、与えられた心拍サブフェーズPm,l(l=1,2,...L)についての所望の画像の見積りが続いて選択される。例えば、個の見積りは、FBP法を用いて適切な心拍フェーズ画像データセットから再構成される画像であり得る。あるいは、しかしながら、先験的画像Ipを用いることもできる。選択された心拍サブフェーズPm,lの所望の画像Iは、続いて、ステップ770において、図3、4及び5を参照して上記された本発明の方法に従って、再構成される。先験的画像Ipが時間解像度の高い画像ではないことから、いくつかの動きぼけ及び動きストリークが先験的画像Ipに現れる。したがって、先験的画像Ipの低品質による影響を軽減させるために正規化パラメータαが選択される。例えば、値α≒0.5〜0.8が用いられる。このようにして、プロセスブロック770で決定されるように、所望の心拍フェーズの全てについての画像が再構成されるまで、所望の画像Iが各心拍フェーズPm,lについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ772において次のサブ心拍フェーズPm,lを選択して、画像再構成法を進行する。与えられた心拍フェーズPmについて全ての心拍サブフェーズ画像が再構成されると、ステップ774において新たな心拍フェーズが選択され、そして、決定ブロック776で決定されるように、通常の心拍フェーズPmが全て用いられるまで、上記の処理が繰り返される。
【0107】
上記のX線多検出器型コンピュータ断層撮影画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが、当業者にとって明らかとなる。例えば、時間解像度の低い先験的画像を用いる、より高い時間解像度の画像を再構成するための上記方法を、よりさらに高い時間解像度を達成するために繰り返し実行することができる。また、例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。したがって、通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。さらに、時間ウィンドウに基づいて動きフェーズ画像データセットを分割することで「動きサブフェーズ画像データセット」を作成することができるように、各ゲーティングウィンドウを複数の「時間ウィンドウ」に分割することができる。
【0108】
C−Arm X線撮像
血管造影C−armシステムは、向上した画像ガイダンスのための軟組織造影を提供する、介入室内におけるコーンビームCTデータ取得を可能とするために、さまざまなベンダーにより修正されてきた。このことは、高コントラストのヨウ素入り血管のみが再構成されるような、従来の回転式血管造影データ取得に対する、重要な進歩を示す。ガントリー回転速度が低速であることにより、C−armコーンビームCTは主に神経介入的過程に適用される。
【0109】
良質な非侵襲的な心拍撮像は、安全で効果的なカテーテルベースの治療介入のため、特に、治療前プラニング、治療中ガイダンス、及び治療後フォローアップのために極めて重要である。カテーテルベースの治療の大部分は、制限された2D投影撮像により減少した情報を提供するX線透視(XRF)ガイダンスを用いて実施される。スタンダードなXRFを用いる場合のさらなる、そして重要な制限として、例えば血管や心室などの複雑な3D解剖学的構造の描写の質が低いことが挙げられる。この制限に対して、MRI、CT、3D超音波、及びXRFと組み合わされた電磁気ナビゲーションシステムなどの3D手段が、現在検討中である。この事実にもかかわらず、正確な3Dから2Dへの画像レジストレーションはいまだに重要なチャレンジとして残されている。2つの主な介入的応用が、その優れた画像ガイダンスのために、注目をあびている。一つ目は、閉塞性アテローム性動脈硬化のための経皮冠動脈インターベンション(PCI)であり、二つ目は、発作性心房細動のための肺静脈隔離(PVI)である。これらの状況下においては、良質の3D断層撮影画像を取得するものと同じ撮像システムの初期設定を実時間蛍光透視法モードにすることができ、即時カテーテルベース治療介入が可能となる。即時的に取得されるとともに自動的にレジスターされた時間分解3D断層撮影画像により、向上した治療ガイダンスが容易となり、イオン化された放射線量を大幅に減少させることができ、そして、特定の治療介入における腎毒性のある造影剤の量を大幅に減少させることができる。さらに、治療前、治療中、治療後の3D心臓コーンビームCT評価を容易に実施することができる。典型的な介入室におけるガントリー回転周期は遅く(5〜10秒)、したがって、従来の心臓CT撮像パラダイムを用いて高い時間分解能を得ることが防止される。
【0110】
C−Arm X線撮像システム
特に図9(a)及び9(b)を参照すると、画像再構成に用いられる本発明の実施形態は、介入手順に関連させて用いられるよう設計されたX線システムを用いる。前記X線システムの特徴として、X線源アセンブリ912を一端に有するとともにX線検出器配列アセンブリ914を他端に有するC−arm910が設けられたガントリーを有している。該ガントリーにより、X線源912及び検出器914がテーブル916上に配置された患者の周りの異なる位置に異なる角度で配向されるとともに、医師が患者に近づくことを可能としている。
【0111】
前記ガントリーは、テーブル916の下側に延びる水平レッグ920とテーブル916から離間し且つ該水平レッグ920の一端から上方に延びる鉛直レッグ922とが設けられたL型の台座918を有している。鉛直レッグ922の上端には、水平中心軸926の周りに回転するよう回転可能に取り付けられた支持アーム924が取り付けられている。中心軸926はテーブル916の中心線に沿うよう配され、アーム924は該中心軸926から半径方向に外側に延びているとともにその外側端にC−arm駆動アセンブリ927を支持している。C−arm910は、駆動アセンブリ927にスライド可能に取り付けられているとともに、矢印930で示されるようにC−arm910をスライドさせC軸928の周りに回転させる駆動モータ(図示せず)に連結されている。中心軸926及びC軸928は、テーブル916の上方に位置するアイソセンター936において互いに直角に交わる。
【0112】
C−arm910の一端にはX線源アセンブリ912が、他端には検出器配列アセンブリ914が搭載されている。以下で詳細に述べるように、X線源912から、検出器配列914に向けられたX線のコーンビームが放射される。このコーンビームの中心線がシステムのアイソセンター936を通過するように、アセンブリ912及び914の両方が中心軸926へ向けて半径方向内側に延びている。コーンビームの中心線は、従って、テーブル916上に配置された対象からX線減衰データを取得している間、システムのアイソセンターを中心として中心軸926の周り又はC軸928の周りの何れかもしくはその両方の周りに回転する。
【0113】
図10(a)に示されるとおり、X線源アセンブリ912には、励起されるとX線のコーンビーム933を放出するX線源932が設けられている。中心線934はシステムアイソセンター936を通過し、検出器アセンブリ914内に収容された二次元フラットパネルデジタル検出器938上に作用する。検出器938は、2048x2048画素の、41cmx41cmの寸法を有する検出器要素の二次元配列である。各検出器要素により、作用するX線の強度を示す電気信号を生成し、したがって患者を通過するにつれ減衰するX線の強度を示す電気信号を生成する。スキャン中、異なる角度からX線減衰投影データを取得するために、X線源932及び検出器配列938がシステムのアイソセンター936の周りを回転する。検出器配列は毎秒30個の投影又は30個のビューを取得することができ、これは、所定のスキャン経路及び速度においてビューがいくつ取得されるかを決定する、制限因子である。
【0114】
特に図9(b)を参照すると、アセンブリ912及び914の回転とX線源932の操作が、CTシステムの制御機構940により制御される。制御機構940には、電力を供給しX線源932にタイミング信号を提供するX線コントローラ942が含まれる。制御機構940内のデータ取得システム(DAS)944は、検出器要素938からデータをサンプルして該データを画像再構成装置945に提供する。画像再構成装置945は、デジタル化されたX線データをDAS944から受けとり、本発明の方法に従って高速画像再構成を実行する。再構成された画像は、大容量記憶装置949内に画像を保存又は画像をさらに処理するコンピュータ946に、入力される。
【0115】
制御機構940には、また、中心軸モータコントローラ947とC軸モータコントローラ948とが設けられている。モータコントローラ947、948は、コンピュータ946からの動作命令に応じて、中心軸926及びC軸928のそれぞれの周りの回転を生じさせる、X線システム内のモータに電力を与える。コンピュータ946により実行されるプログラムにより、アセンブリ912、914を所定のスキャン経路内で動かすモータドライブ947、948への動作命令が作成される。
【0116】
コンピュータ946はまたオペレーターから、キーボード及びその他の手動操作可能な制御部を有するコンソール950を介して、命令及びスキャンパラメータを受け取る。関連するブラウン管ディスプレイ952によって、オペレーターは、コンピュータ946からの再構成された画像及びその他のデータを観測することができる。オペレーターにより供給された命令は、コンピュータ946により用いられ、保存されたプログラムの指示に従ってDAS944に制御信号及び情報を与える。加えて、コンピュータ946は、モータ付きテーブル916を制御して患者をシステムアイソセンター936に対して位置決めするテーブルモータコントローラ954を操作する。
【0117】
図10(d)に示されるように、このスキャン経路の実行は、中心軸モータコントローラ847とC軸モータコントローラ849とを同時に操作して、アイソセンター936の下方でX線源832を円形軌道又は楕円軌道に動かすとともにアイソセンター936の上方の対応する円形軌道に検出器938を動かすことによりなされる。円形軌道の寸法は数々の因子により決定されるものの、経路の閉じた領域を可能な限り大きくすることが目的である。制限的因子は、造影剤の流入中に生じる動的変化をとらえるために必要なフレームレートで、単一の断層撮影された(tomosynthesis)データセットを取得するよう、ガントリーが円形軌道の全体に渡って動くべきである、ということである。本発明におけるこの実施形態においては、このようにして、最大10個の画像データセットが取得される。
【0118】
C−Arm X線画像再構成
上記したように、同じX線C−arm撮像システムを用いて良質な3Dの断層撮影された画像及びリアルタイム透視画像を取得することができ、直接的なカテーテルベースの治療介入が可能となり、この詳細は、例えば、米国特許第7,218,702号に記載されている。このようにして、時間分解された3D断層撮影画像がすぐに取得されるとともに自動的にレジスターされて、治療ガイダンスが改善される。これにより、イオン化放射線量が減少するだけでなく、特定の治療介入においては腎毒性の造影剤量が減少する。さらに、この可能性により、治療前、治療中、及び治療後の3D心臓コーンビームCT評価が、記載されるとおり可能となる。
【0119】
したがって、X線C−arm撮像システムにおいて実施された場合、本発明の方法は、特に図7(a)を参照して上に記載した様に進行する。特に図11を参照すると、3Dコンピュータ断層撮影モードにおける動作時、前記方法は、ステップ1100において、対象から心電図(ECG)信号を取得することから始まる。このECG信号は、取得された画像データをM個の異なる心拍フェーズPMにレトロスペクティブにゲートするために用いられる。続いてステップ1102において、第一ビュー角θnにおける投影ビューのセットの形で画像データを取得することによりデータの取得が始まる。続いてステップ1104において、ガントリーが新しいビュー角へと回転され、そこで画像データが取得される。このプロセスは、決定ブロック1106で示されるように、ガントリーが最後のビュー角θNにまで回転されるまで繰り返される。所望の画像データが全て取得されると、ステップ1110において、ECG信号の取得が停止する。取得された画像データは続いて、上に詳細に記載したように、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズの各々について「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットは、与えられた心拍フェーズPmに対応するゲーティングウィンドウWm中に取得される複数の投影ビューを含む。あるいは、画像データがECG信号中の特定の時間ポイントにおいてのみ取得されるよう、オリジナルの画像データ取得をプロスペクティブにデートすることが可能である。このデータ取得スキームに従うと、選択された心拍フェーズ中に取得された画像データの全てが、心拍フェーズ画像データセットに同様に結合される。
【0120】
各心拍フェーズ画像データセットは高度にアンダーサンプルされていることから、周知のフィルタ補正逆投影(FBP)法などのスタンダードな画像再構成アルゴリズムを用いて画像を再構成しようという試みは、顕著なストリーキングアーチファクトを生ずる結果となる。したがって、本発明の方法は、ステップ1110において先験的画像Ipを再構成することから始まる。先験的画像Ipはステップ1112においてFBP法などの従来の画像再構成法を用いることで再構成される。特に、先験的画像IpはN個のビュー角θnにわたって取得された画像データの全てから再構成される。そのような先験的画像は、画像データが複数の異なる心拍フェーズにわたって取得されるため、鼓動する心臓に関連する力学的情報を本質的に失うこととなる。しかしながら、この力学的情報は、各心拍フェーズの所望の画像を再構成する時にリカバーされる。しかしながらあるいは、その他の例えばHYPR、HYPR−LR及びI−HYPRなどの画像再構成法を用いて先験的画像Ipを再構成することが可能である。例えばHYPR−LR法を用いることにより、所望の画像における信号対ノイズ比(SNR)をさらに増加させることが可能となる。
【0121】
画像再構成法と並行して、与えられた心拍フェーズPmについての所望の画像の見積りが、ステップ1114において作成される。例えば、この見積りは、適切な心拍フェーズ画像データセットからFBP法を用いて再構成された画像であり得る。しかしながらあるいは、先験的画像Ipを用いることも可能である。ステップ1116において、選択された心拍フェーズPmの所望の画像Iが、続いて、図3、4及び5を参照して上記したように本発明の方法にしたがって再構成される。先験的画像Ipが良質の画像でないことから、先験的画像Ipの質の悪さによる影響を緩和するために正規化パラメータαが選択される。例えば、α≒0.3〜0.7の値が用いられる。プロセスブロック1118において決定されるように、所望の画像Iが、この様にして、所望の心拍フェーズの全ての画像が再構成されるまで、各心拍フェーズPmについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ1120において次の心拍フェーズPmを選択して画像再構成法を進行させる。
【0122】
3D断層撮影撮像が完了すると、ステップ1122においてX線C−arm撮像システムがX線透視モードに戻る。心臓カテーテル法工程などの治療介入工程が、続いて、本発明の方法を用いて再構成された良質の3D断層撮影画像からの増加した画像ガイダンスを用いて実施される。対象が一つの撮像システムから次の撮像システムへと物理的に移動されないことから、3D断層撮影画像の撮像ボリューム及び続いて取得される2DX線透視画像が自動的にレジスターされる。これにより、CT画像によりガイドされる治療介入工程の信頼性が向上する。
【0123】
上記のX線C−arm画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが当業者にとって明らかとなる。例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。したがって、通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。
【0124】
磁気共鳴撮像システム
本発明はまたその他の医用撮像手段にも特に適用することができる。そのような撮像手段の一つは磁気共鳴撮像(MRI)である。特に図12に示されるように、本発明の方法はMRIシステムにおいても用いることができる。MRIシステムには、ディスプレイ1212及びキーボード1214を有するワークステーション1210が設けられている。ワークステーション1210には、市販の演算システムを実行するプログラム可能な市販のプロセッサ1216が含まれる。ワークステーション1210により、オペレーターはスキャンに関する指示をMRIシステムに入力することができる。ワークステーション1210は4つのサーバを有し、それらは、パルスシーケンスサーバ1218、データ取得サーバ1220、データ処理サーバ1222、データ記憶サーバ1223である。ワークステーション1210と各サーバ1218、1220、1222、1223は互いに接続されて連通している。
【0125】
パルスシーケンスサーバ1218は、ワークステーション1210からダウンロードされた指示に応答して勾配システム1224及びRFシステム1226を動作させる役割をする。所定のスキャンを実行するために必要とされる勾配波形が作成されて、勾配システム1224に提供され、アセンブリ1228内の勾配コイルが励起されて、位置エンコードMR信号に用いられる磁場勾配Gx,Gy,Gzが作成される。勾配コイルアセンブリ1228は、分極磁石1232と全身RFコイル1334とを含む磁石アセンブリ1230の一部を形成する。
【0126】
RFシステム1226により、RFコイル1234にRF励起波形が与えられて、所定の磁気共鳴パルスシーケンスが実行される。RFコイル1234又は別個の局所コイル(図12には図示されない)により検出される応答MR信号は、パルスシーケンスサーバ1218により作成される命令に基づき、RFシステム1226により受信されて、増幅されて、復調されて、フィルタ処理されて、そして、デジタル化される。RFシステム1226は、MRパルスシーケンスに用いられる様々なRFパルスを作成するRFトランスミッターを備えている。RFトランスミッターは、スキャンに関する指示及びパルスシーケンスサーバ1218からの指示に応答して、所望の周波数、位相及びパルス振幅波形を有するRFパルスを作成する。発生したRFパルスは、全身RFコイル1234又は一以上の局所コイルまたはコイル配列(図12には図示されない)に与えられても良い。
【0127】
RFシステム1226にはまた一以上のRF受信チャンネルが設けられている。各RF受信チャンネルは、該RF受信チャンネルが接続されるコイルにより受信されるMR信号を増幅するRF増幅器と、受信されたMR信号の直角成分I及びQを検出してデジタル化する検出器と、を備える。したがって、受信されたMR信号の大きさは、サンプルされたどの点においても、下記のように成分I及びQの二乗の和のルートをとることにより結成される。
【0128】
【数28】
【0129】
さらに、受信されたMR信号の位相は下記のように決定される。
【0130】
【数29】
【0131】
パルスシーケンスサーバ1218はまた、生理的取得コントローラ1236から患者のデータを任意的に受信する。コントローラ1236は、患者に接続された数々の異なるセンサからの信号、例えば電極からのECG信号又は肺からの呼吸器官の信号、を受信する。そのような信号は通常パルスシーケンスサーバ1218により用いられて、対象の呼吸や心拍とスキャンの実行とがシンクロ又は「ゲート(gate)」される。
【0132】
パルスシーケンスサーバ1218はさらに、種々のセンサからの患者の状態に関する信号又はMRIシステムからの信号を受信するスキャン室インターフェース回路1238と接続する。さらに、スキャン中、患者位置決めシステム1240は患者を所望の位置に移動させるための命令を、スキャン室インターフェース回路1238を介して受信する。
【0133】
RFシステム1226により作成されたデジタル化されたMR信号サンプルは、データ取得サーバ1220によって受信される。このデータ取得サーバ1220は、ワークステーション1210からダウンロードされる指示に応答して動作し、リアルタイムのMRデータを受信し、そして、データのオーバーランによりデータが失われないようバッファー記憶装置を提供する。いくつかのスキャンにおいては、データ取得サーバ1220は、取得されたMRデータをデータ処置サーバ1222に渡すだけでなく、それ以上の機能も果たす。しかしながら、スキャンのさらなる実行を制御するために取得されたMRデータから得られる情報を要するスキャンにおいては、データ取得サーバ1220は、そのような情報を作成してパルスシーケンスサーバ1218に伝えるようプログラムされている。例えば、プレスキャン中、MRデータは取得され、そして、パルスシーケンスサーバ1218により実行されるパルスシーケンスを調整するために用いられる。また、スキャン中、ナビゲータ信号が取得され、RF又は勾配システム演算パラメータを調整するため、又は、k空間がサンプルされるビューのオーダーを制御するために用いられる。さらに、データ取得サーバ1220は、MRAスキャンにおける造影剤の到着を検出するために用いられるMR信号を処理するために用いられても良い。これらの例の全てにおいて、データ取得サーバ1220は、MRデータを取得し、それをリアルタイムで処理して、スキャンを制御するために用いられる情報を作成する。
【0134】
データ処理サーバ1222は、データ取得サーバ1220からMRデータを受信し、それをワークステーション1210からダウンロードした命令に基づいて処理する。そのような処理には、例えば、生のk空間MRデータのフーリエ変換をして二次元又は三次元画像を作成すること、再構成された画像にフィルタを適用すること、取得されたMRデータの逆投影画像再構成を実行すること、機能的MR画像の計算、そして、動作画像又は流動画像の計算など、が含まれる。
【0135】
データ処理サーバ1222により再構成された画像は、ワークステーション1210へと戻され、そこに保存される。リアルタイムの画像は、データベースキャッシュメモリ(図示せず)に保存され、そこから、オペレーターのディスプレイ1212又は磁性体アセンブリ1230の近くに配置される、看護する医師により用いられるためのディスプレイ1242に出力される。バッチモード画像又は選択されたリアルタイム画像は、ディスクストレージ1244のホストデータベースの中に保存される。そのような画像が再構成されてストレージに送られると、データ処理サーバ1222によりワークステーション1210のデータ記憶サーバ1223に通知される。ワークステーション1210は、画像をアーカイブに保管するため、フィルムを作成するため、またはネットワークを介して画像をその他の機関に送るためにオペレーターにより用いられてもよい。
【0136】
CTシステムのように、MRIシステムは、多くの異なる臨床における応用を有し、その中で二次元又は三次元何れかのセットの投影ビューが取得され、一又はそれ以上の患者の画像を再構成するために用いられる。CTシステムにより取得される投影ビューにはラドン空間サンプルが含まれる一方、MRIシステムにより取得される投影ビューにはk空間(又はフーリエ空間)サンプルが含まれる。MRIシステムにより取得されたデータを用いる画像再構成は、必要に応じて、k空間から実空間への変換が要求され、又は、中間のステップとして、ラドン空間への変換が要求される。
【0137】
磁気共鳴撮像パルスシーケンスの例
図12を参照して上記されたようなMR撮像システムを用いた本発明の実施においては、図13に示されるような投影再構成、又はラジアル、パルスシーケンスを用いて、アンダーサンプルされた画像が取得される。これは、選択的な非シンメトリー切断シンク(truncated sinc)RF励起パルス1300がスライス選択勾配1302の存在下で作成される高速勾配リコールエコー (fast gradient-recalled echo)パルスシーケンスである。このパルスシーケンスは、単一k空間円形平面内でサンプリングされることによってk空間平面単一の二次元スライスを取得するために用いられてもよく、又は、図14の1404、1406及び1408により示されるように複数の円形k空間平面をサンプルするために用いられても良い。複数の二次元スライスが取得されると、勾配1302はスラブ状の選択勾配(slab select gradient)となり、その後に位相エンコーディング勾配ローブ(phase encoding gradient lobe)1310及び逆の分極を有する巻き取り勾配ローブ(rewinder gradient lobe)1312が続く。この、軸の位相エンコーディング勾配1310は、スキャン中、各二次元k空間平面1404、1406及び1408からサンプルするために、値にわたってステップされる(stepped through values)。
【0138】
二つの面内読み出し勾配1314及び1316は、NMRエコー信号1318の取得中に再生されて、二次元平面1404、1406又は1408内のk空間が、放射線状のトラジェクトリに沿ってサンプルされる。これらの面内勾配1314及び1316は、軸勾配に対して垂直であるとともに互いに対して垂直である。スキャン中、これらは、放射線状のサンプリングトラジェクトリのビューアングルを回転するために、一連の値に渡ってステップされ、このことは後に詳細に記載する。プレ位相勾配ローブ(prephasing gradient lobe)1320及び1322が面内読み出し勾配のそれぞれに先行し、その後に巻き戻し勾配ローブ1324及び1326が続く。
【0139】
k空間縁境界上の一点からk空間の中心を通ってk空間縁境界上の反対側の点まで延びる好適な直線トラジェクトリとは別のサンプリングトラジェクトリが用いられても良いことは、当業者にとって明らかである。上記したとおり、一つのバリエーションには、サンプルされたk空間容積の全範囲に渡って延びていないトラジェクトリに沿ってサンプルを行う部分的NMRエコー信号1303を取得することが含まれる。直線投影再構成パルスシーケンスに相当する別のバリエーションでは、直線よりもむしろ屈曲した経路に沿ってサンプルが行われる。そのようなパルスシーケンスは、例えば、F.E.Boadaら著の「高速三次元ナトリウム撮像」、Magnetic Resonance in Medicine、1997;37:706−715、及び、K.V.Koladiaら著の「スパイラル投影撮像を用いた高速3D PC−MRA」、Proc.Intl.Soc.Magn.Reson.Med.13(2005)、及び、J.G.Pipe及びK.V.Koladia著の「スパイラル投影撮像:新しい高速3Dトラジェクトリ」、Proc.Intl.Soc.Mag.Reson.Med.13(2005)に記載されている。さらに、本発明を、これらのサンプリング方法の三次元及び二次元バージョンに用いても良いこともまた、明らかである。また、明細書中に用いられる「画素(pixel)」なる語は二次元又は三次元の何れかの場所を指すことを意図して用いられることも明らかである。さらに、多数のパルスシーケンス及びサンプリングパターンを用いて取得されるアンダーサンプルされた画像データから画像を再構成するために、本発明を用いることができ、このことは当業者にも理解される。
【0140】
上記したMRIシステムは、一以上の画像を再構成するために用いられ得る二次元又は三次元何れかの投影ビューのセットを取得するために、多岐にわたる臨床における応用に用いられることができる。本発明の画像再構成法は、取得される投影ビューの全てよりも少ない数を用いて一以上の画像フレームが再構成されるスキャンにおいて、特に有用である。
【0141】
磁気共鳴画像再構成
特に図15を参照すると、図12に示される上記したようなMR撮像システムにおいて実施される場合、本発明の方法は、ステップ1500において、対象から心電図(ECG)信号を取得することから始まる。このECG信号は、取得された画像データをM個の異なる心拍フェーズPMにレトロスペクティブにゲートするために用いられる。次に、ステップ1502において、一連のアンダーサンプルされたk空間データセットの形の画像データが取得される。上記したように、一連のアンダーサンプルされたラジアルインターリーブを用いてk空間をサンプルする図13に示されるようなパルスシーケンスを実行するようにMR撮像システムを指示することにより、アンダーサンプルされた画像データが取得される。例えば図16にはk空間サンプリングパターンの例が示されている。上記したように、各所望の画像フレームについて取得されるk空間データは、研究の時間分解能を高めるために高度にアンダーサンプルされる。さらに、各アンダーサンプルされた画像フレームについて取得された投影ビューは、その他の画像フレームについて取得された投影ビューを用いてインターリーブされる。例えば、点線1600で示されるk空間サンプリング、破線1602で示されるk空間サンプリング及び実線1604で示されるk空間サンプリングを用いて取得された投影は、k空間の同じ場租をサンプルしないよう、その全てが互いにインターリーブされる。これらのサンプリングパターンの各々は個別の画像フレームに対応する。データの取得が完了すると、ステップ1504において、ECG信号の取得が停止する。取得された画像データは続いて、ステップ1506に示されると共に上で詳細に記載したように、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズの各々について「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットは、与えられた心拍フェーズPmに対応するゲーティングウィンドウWm中に取得される複数の投影ビューを含む。あるいは、画像データがECG信号中の特定の時間ポイントにおいてのみ取得されるよう、オリジナルの画像データ取得をプロスペクティブにデートすることが可能である。このデータ取得スキームに従うと、選択された心拍フェーズ中に取得された画像データの全てが、心拍フェーズ画像データセットに同様に結合される。
【0142】
各心拍フェーズ画像データセットは高度にアンダーサンプルされていることから、上記の再グリッド法などのスタンダードな画像再構成アルゴリズムを用いて画像を再構成しようという試みは、顕著なストリーキングアーチファクトを生ずる結果となる。したがって、本発明の方法は、ステップ1508において先験的画像Ipを再構成することから始まる。
【0143】
先験的画像Ipは連続的なk空間インターリーブから取得されたデータを結合する画像データセットから作成される。さらに、先験的画像は、複数の異なるk空間インターリーブを累積する又は平均化することにより作成される。そのような先験的画像は、画像データが複数の異なる心拍フェーズにわたって取得されるため、鼓動する心臓に関連する力学的情報を本質的に失うこととなる。しかしながら、この力学的情報は、各心拍フェーズの所望の画像を再構成する時にリカバーされる。しかしながらあるいは、その他の例えばHYPR、HYPR−LR及びI−HYPRなどの画像再構成法を用いて先験的画像を再構成することが可能である。例えばHYPR−LR法を用いることにより、所望の画像における信号対ノイズ比(SNR)をさらに増加させることが可能となる。
【0144】
画像再構成法と並行して、与えられた心拍フェーズPmについての所望の画像の見積りが、ステップ1510において作成される。例えば、この見積りは、適切な心拍フェーズ画像データセットから再グリッド又はその他の従来のMR画像再構成法を用いて再構成された画像であり得る。しかしながらあるいは、先験的画像Ipを見積り画像として選択することも可能である。ステップ1512において、選択された心拍フェーズPmの所望の画像Iが、続いて、図3、4及び5を参照して上記したように本発明の方法にしたがって再構成される。先験的画像Ipが良質の画像でないことから、先験的画像Ipの質の悪さによる影響を緩和するために正規化パラメータαが選択される。例えば、α≒0.3〜0.7の値が用いられる。プロセスブロック1514において決定されるように、所望の画像Iが、この様にして、所望の心拍フェーズの全ての画像が再構成されるまで各心拍フェーズPmについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ1516において次の心拍フェーズPmを選択して画像再構成法を進行させる。
【0145】
上記の磁気共鳴画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが当業者にとって明らかとなる。例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。同様にして、対象の動きが、データ取得処理中にナビゲータ信号を取得することによりモニターされる。ナビゲータ信号中の情報を用いることにより、上記したように、画像データが続いてレトロスペクティブにゲートされる。さらに、対象の呼吸をモニターすることにより、過分極ヘリウム3MR撮像などの肺の撮像を、向上した時間分解能を用いて実行することができる。通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。
【0146】
陽電子放出型断層撮影システム
特に図17を参照すると、PETスキャナシステムには、検出器リングアセンブリ1711を中心開口又は穴部1712の周りで支持するガントリー1710が含まれる。ガントリーコントローラ1717は、ガントリー1710内に搭載されるとともに、オペレータワークステーション1715から第二シリアル通信リンク1718を介して受信される命令に応答してガントリーを操作する。
【0147】
検出器リング1711は検出器ブロック1720から構成される。各ブロック1720はシンチレータ結晶光電子増倍管のセットを含む。取得回路1725のセットはガントリー1710内に搭載されて検出器リング1711内の各モジュール1720から信号を受信する。取得回路1725によりシンチレータ結晶の各ブロック内の事象座標が決定され、これらの座標(x,z)は結晶ブロック信号の和とともにデジタル化され、ケーブル1726を介して別個のキャビネット1728内に収容された事象ロケータ回路1727に送られる。各取得回路1725はまた、シンチレーション事象が起きた正確な時点を示す事象検出パルス(EDP)を作成する。
【0148】
事象ロケータ回路1727は、取得回路1725により作成された信号を周期的にサンプルするデータ取得プロセッサ1730の一部を形成する。プロセッサ1730は、バックプレーンバス構造1731と、該バス1731上の通信を制御するとともにプロセッサ1730をローカルエリアネットワーク1718にリンクする取得CPU1729と、を有する。事象ロケータ1727は、各々がケーブル1726と接続すると共にガントリー1710内の対応する取得回路1725から信号を受信する、別個の回路基板のセットから構成される。事象ロケータ1727は、取得回路1725により作成される事象パルス(EDP)を検出して、それをそのサンプル周期内のシンチレーション事象が起きた時を示す8ビット時間指標に変換することにより、事象とプロセッサ1730の動作とを同期させる。また、この回路1727は、シンチレーションの総エネルギーが511keV±20%の範囲の外にある場合には検出された如何なる事象を破棄する。各サンプル周期中、各有効事象に関する情報は、事象が起きた時と該事象を検出したシンチレータ結晶の位置とを正確に示すデジタル数のセットに結集される。この事象データパケットは、データ取得プロセッサ1730の一部である同時検出器1732に伝えられる。
【0149】
同時検出器1732は、事象ロケータ1727からの事象データパケットを受け取るとともに、それらのうちのいずれかの二つが一致するかを決定する。ペアとして成立しない事象は破棄されるが、一致する事象のペアは、シリアルリンク1733を介して分類装置1734伝えられる一致データパケットとして位置決めされると共に記録される。各一致データパケットは、事象を検出した二つのシンシレータ結晶のアドレスを正確に特定するデジタル数のペアを含む。これらから、一致事象を作成した放射線経路の位置及び角度を決定することができる。
【0150】
分類装置1734は、画像再構成プロセッサ1740の一部を形成する回路である。画像再構成プロセッサ1740は、バックプレーンバス1741の周りに形成される。画像CPU1742はバックプレーンバス1741を制御すると共にプロセッサ1740をローカルエリアネットワークに418にリンクさせる。メモリモジュール1743もまたバックプレーン1741に接続するとともに以下に詳細に述べるように画像を再構成するために用いられるデータを保存する。アレイプロセッサ1745もまたバックプレーン1741に接続すると共にメモリモジュール1743内のデータを用いて画像再構成を実行するために画像CPU1742の指示の下で動作する。結果生じる画像アレイ1746はメモリモジュール1743内に保存されるとともに画像CPU1742によりオペレータワークステーション1715へと出力される。
【0151】
分類装置1734の機能は、一致データパケットを受信して、一致データの効率的な保存のために、それらからメモリアドレスを作成する。同じ方向(θ)を示すとともにスキャナの撮像領域を通る一致事象放射線全てのセットは、完全な投影又は「ビュー」である。投影ビュー内の特定の放射線経路と撮像視野の中心との間の距離(R)により該放射線がビュー内に位置決めされる。図17に示されるように、例えば、事象1760は、投影角θ及び距離Rにおけるビュー内に位置する投影放射線1762に沿って発生する。分類装置1734は、この投影放射線上に横たわる二つのシンチレータ結晶における事象を示す一致データパケットを分類し出すことにより、スキャン中にこの投影放射線(R,θ)上で生じる事象を全てカウントする。放出スキャン中、一致カウントは、各軸方向画像に対して一つ、メモリ1743内に二次元アレイのセットとしてまとめられ、各々が、その次元の一つとして投影角θをそしてその他の次元として距離Rを有する。この測定された一致事象のθxRマップはヒストグラム又はより一般的にはシノグラムアレイ(sinogram array)1748と呼ばれる。
【0152】
一致事象はランダムに起こり、分類装置1734は各位置データパケット内の二つのシンチレータ結晶のアドレスからθとRの値を素早く決定するとともに対応するシノグラムアレイ要素のカウントを増加させる。放出スキャンが完了すると、シノグラムアレイ1748は各放射線に沿って生じた消滅事象の総数を保存する。そのような消滅事象の数は、放出スキャン中に放射線(R,θ)に沿って生じた陽電子電子消滅事象の数を示し、数分の間に数百、数千の事象が典型的に記録される。これらの数は断層撮影画像を再構成するために用いられる。
【0153】
PET画像の画質は、シノグラム1748に蓄積されることを許されたシンチレーション事象の数に大きく依存する。スキャンが長く継続するほど検出されるシンチレーション事象の数は大きくなり、再構成された画像の画質は高くなる。
【0154】
陽電子放出型断層撮影画像再構成
特に図18を参照すると、本発明は、時間分解放出スキャンを実行するためにPETスキャナにより用いられる。放出スキャンは、プロセスブロック1800において、検査中の対象内に放射性核種を注入することにより開始される。診断用撮像に頻繁に用いられる放射性核種は、フッ素−18(18F)、炭素−11(11C)、窒素−13(13N)及び酸素−15(15O)である。これらは、これらをグルコース又は二酸化炭素などの薬物に含ませることにより「調合薬」と呼ばれる放射性トレーサーとして用いられる。調合薬は患者に注入され、グルコース代謝、脂肪酸の代謝及びタンパク質合成としてそのようなプロセスに関与することとなる。
【0155】
PETスキャナの穴部1712に患者が配置され、プロセスブロック1802でシンチレーション事象が検出されてカウントされる。上記したように、シンチレーション事象は、検出され、分類され、そして、投影ビューθ内の各放射線Rについてのカウントとしてシノグラム1748内に保存される。事象はカウントされるとともに、決定ブロック1804で決定されるように比較的短い時間間隔について蓄積される。プロセスブロック1806において、前記時間間隔が終了すると、蓄積されたシンチレーション事象カウントが時間間隔シノグラム1808として保存される。
【0156】
決定ブロック1810においてスキャンの終了が検出されるまで、放出スキャンは継続し、各時間間隔の後に蓄積されたシノグラムカウントが保存される。スキャンの終了は、プリセットされた時間またはプリセットされた時間間隔数でも良い。何れの場合においても、放出スキャン中に複数の時間間隔シノグラム1808が作成され、そして最後のシノグラム1808が放出スキャン全体における合計カウントを保存する。各時間間隔シノグラム1808は、上記したMR及びCT撮像システムを用いて取得された画像データセットに類似している。
【0157】
スキャンの画像再構成フェーズがここで開始され、このフェーズ中、各時間間隔の最後における調合際の摂取を示す画像フレームが再構成される。まず、プロセスブロック1812において、先験的画像Ipが再構成される。これは、放出スキャン中に保存された剤後のシノグラム1808を用いる、従来の逆投影再構成である。これには、放出スキャン全体における蓄積されたシンチレーション事象が含まれ、最高の画質となる。あるいは、前回取得された対象のX線コンピュータ断層画像を先験的画像Ipとして利用することも可能である。このコンピュータ断層撮影画像がPET/CT撮像システムの組み合わせを用いて取得される場合、取得された時間間隔シノグラム1808を伴う先験的画像Ipのレジストレーションは不要と考えられる。しかしながら、コンピュータ断層撮影画像が異なる撮像システムを用いて取得された場合には、画像レジストレーションが必要となる。
【0158】
1814においてループに入り、その中で時間分解画像フレームIが先験的画像Ipを用いて再構成される。寄り詳細には、プロセスブロック1816において所望の画像フレームの見積りがまず選択される、この見積り画像は、従来の逆投影再構成を所望の時間間隔シノグラム1808上で実行して作成されても良く、又あるいは、見積り画像は先験的画像Ipとして選択される。画像フレーム再構成プロセス1818は、続いて、図3、4及び5を参照して上に記載される本発明の方法にしたがって実行される。これは、決定ブロック1820で決定されるように、各時間間隔シノグラム1808に対応する画像フレームが作成されるまで繰り返される。結果として、放出スキャン中、各時間間隔における調合剤の摂取を示す一連の画像フレームが作成される。再構成中により良質の先験的画像を用いることにより、各画像フレームの画質は、小さな消滅事象カウントを有するシノグラムを用いる従来の画像再構成よりも、実質的に向上する。
【0159】
上記の画像再構成ストラテジーと同じものを、単光子放出型コンピュータ断層撮影(SPECT)システムを用いて取得される画像を再構成するために利用することができることは、当業者に容易に理解される。PETスキャナの場合と同様、SPECTは、異なる放射線経路に沿って対象から放出される光子の検出されたカウントを蓄積する。スキャン中、ガンマカメラがゆっくりと動かされて異なるビュー角におけるカウントを蓄積する。本は詰めを用いて、一連の画像フレームが、ガンマカメラをより素早く動かすことにより、同じ一連のビュー角にわたって繰り返し取得される。合計スキャン時間を増加させないように各ビュー角においてより少ないカウントが蓄積されるものの、各ビュー角におけるカウント全てを足し合わせることにより形成されるスパース化画像を用いることにより、各再構成された画像フレームのSNRが維持される。
【0160】
本発明は一以上の好ましい実施形態の形で記載されており、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることは明らかである。例えば、本発明の方法は、撮像システム内で取得された画像データの時間分解能を高めるために、何れの撮像システムにおいても実施可能である。
【技術分野】
【0001】
(関連出願の参照)
本出願は、2007年12月20日に出願された「先験的画像制限圧縮センシング(prior image constrained compressed sensing)を用いた画像再構成法」と称する米国仮出願番号61/015,559、及び、2008年1月14日に出願された「先験的画像制限圧縮センシングを用いた画像再構成法」と称する米国仮出願番号61/020,847、及び、2008年6月9日に出願された「先験的画像制限圧縮センシングを用いた画像再構成法」と称する米国仮出願番号61/059,891の利益を主張する。
【0002】
(連邦政府の委託研究の記載)
本発明は、政府機関である国立衛生研究所NIH EB005712及びNIH EB007021により認められた政府支援によりなされたものである。米国政府は本発明に関し一定の権利を有する。
【0003】
本発明は、医用画像、特に取得された画像データから画像を再構成する方法に関する。
【背景技術】
【0004】
コンピュータ断層撮影システムにおいては、「画像面」と称されるデカルト座標系のXY平面内に位置するように視準された扇状のビームがX線源により投影される。このX線ビームは、患者などの撮像される対象を通り抜けて複数の配列された放射線検出器に作用する。透過した放射線の強度は前記対象によるX線の減衰に依存し、各検出器により、別々の電気信号がビームの減衰の測定結果として生成される。全ての検出からの減衰の測定結果が別々に取得され、いわゆる「透過プロファイル」又は「減衰プロファイル」又は「投影」が作成される。
【0005】
従来のCTシステムにおけるX線源及び検出器配列は、対象を横切るX線ビームの角度が常に変化するよう、画像平面内のガントリーの上で対象の周りに回転される。与えられた角度における検出器配列からの透過プロファイルは「ビュー」と呼ばれ、そして、対象の「スキャン」にはX線源及び検出器が一回転する間の異なる角度の向きにおいて得られる複数のビューのセットが含まれる。2次元スキャンにおいては、データが処理されて、対象に渡って得られる二次元的スライスに対応する画像が構成される。2次元データから画像を再構成するための一般的な方法は、この分野ではフィルタ補正逆投影法と称される。この画像再構成処理においては、スキャン中に取得された減衰測定結果が、「CT数」又は「ハウンズフィールド単位」と称される整数へと変換され、これらはディスプレイ上の対応する画素の輝度を調整するために用いられる。
【0006】
フィルタ補正逆投影画像再構成は、取得された透過プロファイルからCT画像を再構成するために用いられる最も一般的な技法である。図1に示されるように、プロファイル100における各レイサム(ray sum)104を、矢印106で示されるレイサム104を生成したX線経路と同じX線経路に沿ってFOV102を介して投影することにより、各取得されたX線透過プロファイル100が撮像領域(FOV)102上に逆投影される。FOV102内に各レイサム104を投影する時、我々は物体の先験的情報(priori knowledge)を有しておらず、FOV102内のX線の減衰は均一であり且つレイサムはX線経路が通る各画素内に平等に分配されると仮定している。例えば、一つの透過プロファイル100における単一のレイサム104のX線経路108が図1に図示されており、これがFOV102内のN個の画素を通っている。このレイサム104の減衰値PはこれらN個の画素の間で平等に分けられる。
【0007】
【数1】
【0008】
ここで、μnはN個の画素を有するX線経路内のn番目の画素に分配される減衰値である。
【0009】
明らかに、FOV102内の減衰が均一であるという仮定は正しくない。しかしながら、この分野で周知のように、特定の補正が各透過プロファイル100になされ、そして、充分な数のプロファイルが投影角の対応する数において取得されれば、上記の間違った仮定に起因するエラーは最小化されると共に画像アーチファクトも抑制される。画像再構成の典型的なフィルタ補正逆投影法においては、2次元CT画像における画像アーチファクトを適切に抑制するためには、400から1000ビューが通常必要とされる。
【0010】
X線CTの別の問題は、スキャン中に物体がさらされるX線の放射線量である。解像度のより高いアーチファクトのない画像を得るためには、所望の信号ノイズ比(SNR)で画像を再構成するために充分に高いX線強度において多くのビューを得る必要がある。放射線量のレベルは、ビームの強さを小さくする又は取得されたビューの数を減らすことにより小さくすることができるが、何れの方法も再構成された画像のSNRをも減少させてしまう。
【0011】
一般的に、心臓CT撮像は特に困難な課題である。例えば、冠動脈の細かい枝を画像化するためにはサブミリメーター等方性空間分解能が必要となる。心臓のコンピュータ断層撮影は、最初、電子ビームCT(EBCT)により心臓の硬化を評価する造影剤を用いることなく実施されていた。動くものがないことにより、EBCTによるスキャン時間は50ミリ秒以下となる。EBCTによる取得は、高い時間分解能を提供する一方、その空間分解能は、例えば、スライス厚3ミリメーターの面内分解能1.2ミリメーターと低い。近年、従来の回転ガントリーCTは大きく改善されている。最先端の64スライス又は320スライス多検出器型CT(MDCT)においては、0.6x0.6x0.6mm3等方性空間分解能が可能である。さらに、最先端のCTガントリーは、シングルX線源−検出器システムにおいて一回転0.27秒で回転し、これにより、心臓の撮像において150ミリ秒の時間分解能が達成される。
【0012】
磁気共鳴撮像(MRI)は、核磁気共鳴(NMR)現象を利用して画像を作成する。ヒト組織等の物質が均一な磁場(分極磁場B0)を受けると、その組織内におけるスピンの個々の磁気モーメントは、この分極磁場に沿って整列しようとするが、その周囲でそれらが有する固有ラーモア周波数でランダムに歳差運動を行う。この物質又は組織が、xy平面にあって且つラーモア周波数に近い磁場(励起磁場B1)を受けると、ネット整列モーメントMzは、そのxy平面に回転し、あるいは「傾いて」、ネット横磁気モーメントMxyを生成する。励起されたスピンにより信号が出力され、励起信号B1の終了後にこの信号が受信されて画像を形成するために処理される。
【0013】
これらの信号を利用して画像を作成する際には、磁場勾配(Gx、Gy、及びGz)が用いられる。通常、撮像される領域は、使用される特定の位置決め法にしたがってこれらの勾配が変動する連続的な測定サイクルによりスキャンされる。この分野では各測定が「ビュー」と称され、このビューの数でその画像の解像度が決定される。結果として生じる受信NMR信号またはビューまたはk空間サンプル数のセットは、デジタル化され、処理されて、周知の多くの再構成技法の一つを用いて画像が再構成される。合計スキャン時間は、一部においては、各測定サイクルまたは「パルスシーケンス」の長さにより決定され、そして一部においては、一つの画像に対して取得される測定サイクル数またはビューの数により決定される。多くの臨床的応用において既定の解像度を有する画像における合計スキャン時間及びSNRが重要視されていることから、それを念頭に置いた多くの改善がなされている。
【0014】
投影再構成法は、磁気共鳴撮像法の開始以来知られており、この方法は、米国特許第6,487,435号に開示されているように再び用いられている。図2(a)に示されるように、フーリエ・イメージング法で行われる直線的、又はカーテシアンの、スキャンパターンでk空間をサンプリングするのではなく、投影再構成法はむしろ、図2(b)に示されるように、k空間の中央から外向きに伸びる半径方向の線をサンプリングする一連のビューをとともにk空間をサンプリングする。k空間をサンプリングするのに必要とされるビューの数によりそのスキャンの長さが決定され、取得されたビューの数が不十分な場合には、その再構成画像にストリークアーチファクトが生じることとなる。米国特許第6,487,435号に開示された技法においては、インターリーブされたビューを伴う一連のアンダーサンプルされた画像を取得し、周縁k空間データを一連の画像フレーム間で共有することにより、そのようなストリーキングを減少させている。
【0015】
取得された投影ビューのセットから画像を再構成するために用いられる方法の2つの例が、例えば米国特許第6,710,686に開示されている。MRIにおいて最も一般的な方法は、k空間サンプルを半径方向サンプリング軌道上のそれらの位置をカーテシアングリッドに再グリッドすることである。その後、再グリッドされたk空間サンプルに対して二次元または三次元フーリエ変換を実行することで、画像が再構成される。MR画像を再構成する第二の方法は、半径方向のk空間投影ビューを、まず各投影ビューをフーリエ変換してからラドン空間に変換することである。これらの信号投影をフィルタ補正して撮像領域(FOV)へと逆投影することにより、それらの信号投影から画像が再構成される。この分野において周知のように、取得された信号投影の数が、ナイキストサンプリング理論(Nyquist sampling theorem)を満たすために必要とされる数よりも不十分な場合には、再構成画像にストリークアーチファクトが生じることとなる。
【0016】
用いられる技法により、医療用画像を作成するために現在用いされているMRスキャンの多くが、必要データを取得するまでに長い時間を要する。スキャン時間が短縮されると、患者数が増加し、患者への快適さが改善され、そして動きによるアーチファクトの減少による画質が向上することなどから、そのようなスキャン時間の短縮は重要な懸念事項である。このスキャン時間を短縮するための様々な方法が開発されている。
【0017】
そのような方法の一つには、一般的に「パラレル・イメージング」と呼ばれるものが挙げられる。パラレル・イメージング技法は、RFパルスと磁場勾配とを用いて順次取得しなければならないエンコーディング(位相エンコーディング又は周波数エンコーディング)の代わりに、RF受信コイルの配列からの空間情報を用いる。配列の空間的に独立した各受信コイルは、一定の空間情報を運ぶとともに、異なる感度プロフィールを有している。この情報は、別々のコイルから受信される同時に取得されたデータを組み合わせることにより受信されたMR信号の完全な位置エンコーディングを達成するために用いられる。具体的には、パラレル・イメージング技法においては、k空間内でカバーされる最大範囲を固定したままで、取得された位相エンコードk空間サンプリングの線の数を減らすことにより、k空間をサンプリングする。別々の受信コイルにより生成された別々のMR信号を組み合わせることにより、一つの画像に必要な取得時間が短縮され(従来のk空間データ取得との比較)、最も好ましい場合においては、受信コイルの数に倍数短縮される。したがって、複数の受信コイルを用いることで、勾配切替速度またはRFパワーを増加させることなく、撮像速度を倍増させることができる。
【0018】
生体内撮像用に開発され適用される、そのようなパラレル・イメージング技法の二つのカテゴリには、SENSE(SENSitivity Encoding)及びSMASH(SiMultaneous Acquisition of Spatial Harmonics)が含まれる。SENSEにおいては、アンダーサンプルされたk空間データが、まずフーリエ変換により各コイルからエイリアス画像が作成され、その後、重ね合わせられた画素値の線形変換によりそのエイリアス画像信号が展開される。SMASHにおいては、異なる受信コイルにより取得される近接する線の加重された組み合わせを構成することにより、省略されたk空間の線が埋められる又はフーリエ変換の前に再構成される。SMASHにおいては、コイルの空間的感度を決定することが必要とされ、その決定をする一つの方法は、可変な密度を有するk空間サンプリングの使用を伴う「オートキャリブレーション」である。
【0019】
上記の撮像手段の例においてはデータ取得方法が大きく異なる。即ち、一方ではMRデータ取得においてフーリエ係数を求めるためにk空間がサンプルされ、もう一方ではX線CTデータ取得において整数が測定される。それにもかかわらず、上記の両方の撮像手段のための画像再構成においては、アンダーサンプルされたデータのセットから質の高い画像を再構成する、という共通の課題がある。
【0020】
一般的な画像再構成理論によれば、エイリアシングアーチファクトのない画像を再構成するためには、画像データを取得するために用いられるサンプリングレートが、ナイキスト−シャノンのサンプリング定理に示されるいわゆるナイキスト基準を満たしている必要がある。さらに、一般的な画像再構成理論においては、画像に関する細かい事前情報は必要とされない。その一方で、所望又はターゲットとする画像に関するいくつかの事前情報が利用でき、それを画像再構成プロセスの中に適切に盛り込まれた場合には、ナイキスト基準が満たされていなくとも、画像は正確に再構成される。例えば、所望の目標画像が円対称性を有し且つ空間的に一様であることが分かっている場合には、平行ビーム投影のうちの一つのビューのみ(即ち一つの投影ビュー)が、対象の線形減衰係数を正確に再構成するために必要となる。別の例としては、所望のターゲット画像が単一の点でのみ構成されていることが分かっている場合には、その点で交差する、二つの直交する投影のみが、画像点を再構成するために必要となる。したがって、所望のターゲット画像がスパース的に分配された(sparsely distributed)点のセットであるなどの所望のターゲット画像に関する事前情報が分かっていれば、取得されたデータのセットがナイキスト基準を満たしていなくとも、そのデータのセットから画像を再構成することができる。より一般的に言い換えると、所望のターゲット画像のスパース性(sparsity)に関する情報を用いることでナイキスト基準を緩和することができる。しかしながら、そのような議論を一般化して厳密な画像再構成理論を定式化することは非常に重要な課題である。
【0021】
ナイキスト基準は情報科学の分野において最も重要な基礎の一つである。しかしながら、ナイキスト基準は、磁気共鳴撮像(MRI)やX線コンピュータ断層撮影(CT)などの現代の医療用撮像手段においても極めて重要な役割を果たす。撮像システムにより取得されたデータサンプルの数がナイキスト基準における要求よりも少ない場合、再構成画像にはアーチファクトが生じる。一般的には、そのような画像アーチファクトにはエイリアシング及びストリーキングアーチファクトが含まれる。実際には、意図的に又は避けられない状況により、ナイキスト基準はしばしば破られる。例えば、時間分解MR血管造影の研究においては、データ取得時間を短縮するためにアンダーサンプル投影再構成取得法又は放射線状取得法がしばしば意図的に用いられる。
【0022】
近年、「圧縮センシング」(CS)と呼ばれる画像再構成のための新しい数学的フレームワークが定式化された。圧縮センシングにおいては、スパースな画像に対する線形投影の小さなセットのみで良質な画像が再構成される。CSの理論は、E. Candes、J. Romberg、及びT. Taoによる「ロバスト不確定性原理:不完全性の高い周波数情報からの厳密な信号再構成」、IEEE Transactions on Information Theory 2006;52:489〜509ページ、及び、D. Donohoによる「圧縮センシング」、IEEE Transactions on Information Theory 2006;52:1289〜1306ページに記載されており、また、例えば米国特許出願番号第11/199,675号に開示されている。
【0023】
CSの数学的フレームワークは簡潔ではあるが、医用撮像分野への再構成法の適用性は、スパースな医用画像に大きく依存する。残念ながら、医用画像はしばしば一般的な画素表現においてスパースでない。それにもかかわらず、画像をスパース化するために、単一の画像に対して数学的変換を行うことができる。そのような変換は「スパース化変換(sparsifying transforms)」と呼ばれる。具体的には、スパース化変換、Ψ、が与えられた場合、CS画像再構成は次の目的関数を最小化することにより実施される。
【0024】
【数2】
【0025】
上式は以下を満たす。
【0026】
【数3】
【0027】
上記の目的関数において、Iは所望の画像を表すベクトルであり、Yは撮像システムにより取得されるデータを表すベクトルであり、Aは測定結果を記述するシステム行列である。
【0028】
また、以下を満たす。
【数4】
【0029】
上式は、N次元ベクトルxのL1ノルムと呼ばれる。即ち、CS画像再構成により、スパース化された画像のL1ノルムを最小化する画像が、物理的測定値AI=Yを満たす全ての画像において決定される。
【0030】
圧縮センシング画像再構成理論の基本的な考え方をまとめると次のようになる。即ち、画素表現における所望の画像を直接再構成する代わりに、所望の画像のスパース化されたバージョンが再構成される。スパース化された画像においては、実質的により少ない画像画素が重要な画像価値を有する。したがって、アンダーサンプルされたデータセットからスパース化された画像を再構成することが可能となる。スパース化された所望の画像が再構成されると、「逆スパース化変換」を用いて前記スパース化された画像が変換されて所望の画像に戻される。実際には、「逆」スパース化変換は明確なフォームを有する必要はない。実際、スパース化変換のみが画像再構成において必要とされる。
【発明の概要】
【0031】
本発明によれば、X線コンピュータ断層撮影(CT)、X線C−arm撮像、及び磁気共鳴撮像(MRI)、陽電子放出型断層撮影(PET)、及びシングルフォトン放出型コンピュータ断層撮影(SPECT)などの数々の異なる撮像手段に適用可能な画像再構成法が提供される。より詳細には、本発明によれば、画像再構成プロセスの中に対象の適切な事前情報を盛り込むことにより信号ノイズ比(SNR)が向上した、正確な再構成における様々なメリットを組み合わせた画像再構成法が提供される。向上したSNRに加え、与えられた所望の画像及び与えられた投影の数について、従来の圧縮センシング(CS)などの画像再構成法では成し得なかった正確な画像再構成が、本発明の方法により達成される。
【0032】
本発明の一側面によれば、対応する画像データが取得される際の時間解像度よりも高い時間解像度を示す画像の時系列画像を作成する方法が提供される。例えば、本発明により、高い時間分解能を有する心臓の撮像の方法が提供される。心臓CTにおいては、低速ガントリー回転データ取得が用いられる。より詳細には、心臓CT血管造影法及び心臓機能の測定における診断の正確性を顕著に向上させる高い時間分解能を達成することが可能となる。さらに、一回の息止め中に低速ガントリー回転を用いることにより、ビュー角の同期の問題が大幅に改善される。高い時間分解能はMR撮像応用においても実現可能である。
【0033】
本発明の別の側面によれば、高速ガントリー回転データ取得システムを用いた、従来の多検出器型CT(MDCT)スキャナにおいて時間分解能を向上させるための、根本的に異なる方法が提供される。より詳細には、フィルタ補正逆投影画像再構成における、心拍ゲーティングウィンドウなどのゲーティングウィンドウが、複数のサブウィンドウまたは「時間ウィンドウ」に分割される。本発明は、各サブウィンドウからのデータを用いて画像を再構成する方法を提供する。時間分解能を向上させるこの方法は、低速ガントリー回転CT撮像及びMR撮像応用においても実現可能である。
【0034】
本発明の別の側面によれば、ガントリー角を同期させることが不要とされる個別の投影が異なる心拍フェーズにセグメント化されるような根本的に異なるセグメント化された取得、又は、適切な心拍フェーズを用いるその他のデータ取得が、提供される。このようにして、セグメント化された取得の時間分解能を向上させて良質な画質を実現することができる。例えば、従来の多検出器型CT(MDCT)においては、不整脈によりデータギャップ及び異なるセクター間のオーバーラップが生じる。しかしながら、本発明の実施においては、不整脈は、各心拍フェーズにおける高度にアンダーサンプルされたデータセットの不均一な分布しか引き起こさない。このことは、用いられる特定の撮像手段に依存することなく、事実である。この不均一性は、本発明により再構成される画像に大きく影響することはない。
【0035】
本発明の別の側面によれば、患者の心拍数に制限されることのない心臓撮像における正確な画像再構成が提供される。通常、患者の心拍数が高いほど、各心拍フェーズにおいてより多くの取得された撮像が得られる。これにより、本発明の画像再構成法を用いて画質の向上を実現することができる。とりわけ、直接の医用重要性は、本発明の方法の実施にはベータブロッカーが不要であるという点である。
【0036】
本発明の別の側面によれば、カテーテルベースの介入手順中に用いられるものと同じ撮像システムを用いて、時間分解四次元心臓「ロードマップ」を作成することを提供する。これにより、介入手順中の長たらしい3Dから2Dへの画像レジストレーションの必要性が緩和される。このことは、撮像システムのスペース及び電源の配分の観点、さらに、より多くの患者を確実に診断し治療することができるとの観点から、病院側にとって有益となる。
【0037】
本発明の前述した側面及びその他の側面及び利点は、以下の記載の中で述べられる。本明細書においては、本明細書の一部を構成する添付された図面について記載され、図面の記載は本発明の好ましい実施形態である。しかしながらそのような実施形態は本発明の全ての範囲を表すものではなく、したがって本発明の範囲は請求の範囲及び本明細書の中に記載する。
【図面の簡単な説明】
【0038】
【図1】画像再構成プロセスにおける従来の逆投影ステップの図的記述である。
【図2】(a)はMRIシステムを用いた典型的なフーリエ又はスピンラップ画像取得中にk空間がサンプルされることを示す図解である。(b)はMRIシステムを用いた典型的な投影再構成画像取得中にk空間がサンプルされることを示す図解である。
【図3】本発明の画像再構成法の実施形態のフローチャートである。
【図4】本発明の画像再構成法の別の実施形態のフローチャートである。
【図5】本発明の画像再構成法のさらに別の実施形態のフローチャートである。
【図6】(a)はX線コンピュータ断層撮影(CT)撮像システムの図的記述である。(b)は図6(a)のCT撮像システムのブロックダイアグラムである。
【図7】(a)は図6(a)のCTシステムで用いられた本発明の実施形態のフローチャートである。(b)は図6(a)のCTシステムで用いられた本発明の別の実施形態のフローチャートである。
【図8】は心電図(ECG)信号の例の図解である。
【図9】(a)は本発明を用いるC−armX線システムの図的記述である。(b)は図9(a)のC−armX線システムのブロックダイアグラムである。
【図10】(a)は図9(a)のC−armX線システムのX線源及び検出器の図的記述である。(b)は図9(a)のC−armX線システムにより用いられるC−armスキャン経路の図的記述である。
【図11】図9(a)のC−armX線撮像システムにより実行されるスキャンにおける、本発明の別の実施形態のフローチャートである。
【図12】本発明の実施に用いられる磁気共鳴撮像(MRI)システムのブロックダイアグラムである。
【図13】本発明の一実施形態を実施するための、図12のMRIシステムに用いられるパルスシーケンスである。
【図14】図13のパルスシーケンスを用いてサンプルされるk空間データの図的表現である。
【図15】図11のパルスシーケンスを用いる、図10のMRIシステムに用いられる本発明の別の実施形態のフローチャートである。
【図16】インターリーブされた投影ビューの図的表現である。
【図17】陽電子放出型断層撮影(PET)撮像システムのブロックダイアグラムである。
【図18】図17の陽電子放出型断層撮影(PET)撮像システムの別の実施形態のフローチャートである。
【発明を実施するための形態】
【0039】
一般的に、データのセットから画像を再構成する方法には、測定されたデータサンプル、Y、から所望の画像、I、を見積るための数々のステップが含まれる。より詳細には、画像再構成は次の一貫性の条件を満たすべきである。
【0040】
【数5】
【0041】
上式において、Aはシステム行列である。一般的に、システム行列Aは所望の画像Iを取得されたデータサンプルYに関連付ける前進射影演算子(forward projection operator)とみなすことができる。コンピュータ断層撮影(CT)撮像を扱う場合、システム行列は再射影演算を含むことができ、一方で、磁気共鳴撮像(MRI)においては、システム行列はフーリエ変換演算を含むことができる。上式(1)の一貫性の条件は、言い換えると、画像が正確に再構成されたときに、測定された投影データの正しい見積もりを作成するために、前進射影演算子が実際のデータ取得過程を実質的に再現することを表している。
【0042】
本発明の方法は、良質な所望の画像を再構成する方法を提供する。通常、圧縮センシング(CS)の原理を利用した繰り返し画像再構成法を制限するために、「先験的画像」が用いられる。例えば、CSにおいて通常用いられるスパース化変換に加え、所望の画像から先験的画像を差し引くことにより、画像はさらにスパース化される。その結果、CS法で要求されるサンプルの数よりも実質的に少ないサンプルの数を用いて画像を正確に再構成することができる。
【0043】
より詳細には、先験的画像Ip及び再構成される所望の画像Iが与えられた時、画像再構成のための本発明の方法は次の目的関数を最小化することにより実行される。
【0044】
【数6】
【0045】
ここで、Ψ1及びΨ2はスパース化変換であり、
【数7】
はL1ノルム演算であり、αは上式(2)の目的関数の二つの項の相対的な重みを調節するために用いられる正規化パラメータ(regularization parameter)である。上述したとおり、以下の式が与えられる。
【0046】
【数8】
【0047】
上式は、N次元ベクトルxのL1ノルムを示す。より一般的には、所望の画像の適切な画質を維持しながら真のL1ノルムを変更することが可能である。例えば、式(2)の目的関数は、以下のように一般化することができる。
【0048】
【数9】
【0049】
ここで、
【数10】
は、Lpノルム演算を示し、以下のように表わされる。
【0050】
【数11】
【0051】
上述したとおり、好ましくはp=1.0であるものの、pは異なる値であってもよい。pの値がp=1.0から逸脱するほど、通常、再構成された所望の画像の品質が低下するということは、当業者に理解される。
【0052】
式(2)のスパース化変換、Ψ1及びΨ2は、通常は異なるものの、同じスパース化変換であってもよい。スパース化変換には、例えば、ウェーブレット変換、一次階差(first order finite difference)、二次階差(second order finite difference)、及び、例えば次式で表わされる離散グラデーション変換(discrete gradient transform)▽m,nなどの離散グラデーション変換が含まれる。
【0053】
【数12】
【0054】
ここで、指数m及びnは画像I内の画素の位置を示す。▽m,nI(m,n)で特定される画像は通常「勾配画像」と呼ばれる。
【0055】
式(2)の目的関数内の項は両方とも重要である。それらの重要性により、正規化パラメータαの選択により画像再構成処理全体が調節される。したがって、正規化パラメータαの選択は先験的画像Ipの選択に依存すると共に目の前の臨床における応用に依存する。例えば、式(2)の目的関数内の二番目の項、
【数13】
は、先験的画像Ipから潜在的に受け継がれたストリーキングアーチファクトを軽減する。さらなる例として、心臓の撮像における応用においては、正規化パラメータをα≒0.3〜0.7と選択すれば通常十分である。
【0056】
式(1)の一貫性の条件を、全体的な画像再構成により良く盛り込むために、ラグランジュの乗数法を利用する。そのようにして、上記一貫性の条件を用いて式(2)で定められた目的関数の最小化にさらなる制限を追加する。新しい目的関数は、したがって、以下の様な形となる。
【0057】
【数14】
【0058】
ここで、λはラグランジュ乗数であり、Xは差分行列であり、
【数15】
はL2ノルム演算の二乗であって、N次元ベクトルxについては以下のように表わされる。
【0059】
【数16】
【0060】
式(3)の差分行列は、式(1)の一貫性の条件を用いて以下のように表される。
【0061】
【数17】
【0062】
ラグランジュ乗数λは、本発明を実施する際に用いられる特定の撮像システムについて経験的に定められる。例えば、ラグランジュ乗数λは、所望のデータ一貫性要求と先験的画像Ipとの類似点との間のトレードオフにより決定される。大きなラグランジュ乗数λが選択された場合、再構成された画像のノイズ分散は小さくなる。しかしながら、これは、先験的画像の高い空間分解能特性の損失として達成された可能性がある。同様に、より小さなラグランジュ乗数λが用いられた場合には、先験的画像の高い空間分解能特性は良く維持されるものの、所望の画像におけるノイズ分散は高くなる可能性がある。そのような状態は、用いられる撮像システムにより達成され得るコントラスト対ノイズ比に影響を及ぼす。
【0063】
式(3)に示される目的関数は、撮像システムのノイズを考慮する目的でさらに変更することができる。そのようにして、次の目的関数が最小化される。
【0064】
【数18】
【0065】
ここで、XTは差分行列Xの転置であり、Dはシステムノイズ行列(system noise matrix)であって次式で決定される行列要素を有する対角行列である。
【0066】
【数19】
【0067】
ここで、σn2はノイズ分散であって本発明を実施する際に用いられる撮像システムにおけるノイズを示すパラメータである。例えば、X線撮像システムにおいては、ノイズパラメータσn2はn番目のX線検出器に関連するノイズ分散である。あるいは、MR撮像システムにおいては、ノイズパラメータσn2はn番目の受信コイルにおいて見積もられるノイズ分散である。
【0068】
本発明の方法においては、先験的画像Ipは二つの役割を果たす。第一に、全体的な画像再構成を加速する、繰り返し再構成における種画像(seed image)としての役割を果たす。さらに、前記先験的画像Ipは、所望の画像Iをさらにスパース化させるために用いられ、したがって別のスパース化変換としての役割を果たす。可能な先験的画像Ipについての簡単な議論を、異なる撮像手段を参照して以下に述べる。しかしながら、臨床における応用に依っては以下に特に記載されるもの以外の先験的画像Ipを用いることができることは、当業者には明らかであろう。本明細書に記載されるように、先験的画像Ipは、再構成される所望の画像を示す先験的情報が含まれた対象の画像である。先験的画像Ipは、これまで実施されてきた撮像研究から再構成され、又は、所望の画像のために取得された画像データと同じセッションにおいて取得された画像データから再構成される。通常、先験的画像Ipは、所望の画像と同じ撮像手段を用いて取得され、ここで、先験的画像Ipは所望の画像とは異なる撮像手段から得られる。
【0069】
図3を参照すると、本発明の方法の一実施は、式(2)の目的関数を用いて、ステップ300で示されるように、正規化パラメータαを初期化することから始める。正規化パラメータαを選択することにより、所望の画像のスパース性と先験的画像の所望の画像への影響間のトレードオフが決定される。したがって、正規化パラメータαの値は、目の前の臨床における応用に依って変化する。例えば、心臓撮像への応用においては、通常α≒0.3〜0.7の値で十分である。続いて、ステップ302及び304に示されるように、式(2)の目的関数における一番目と二番目の項がそれぞれ初期化される。一番目の項、
【0070】
【数20】
の初期化は、ステップ306で始まり、ここで、先験的画像Ipが所望の画像の見積り即ち「見積り画像」から差し引かれ、「差分画像」が作成される。通常、見積り画像は、所望の画像の強度の適切な近似である。先験的画像Ip及び所望の画像の見積りIの具体的な選択は、撮像手段及び具体的な臨床における応用に依存する。したがって、これらの選択の別の選択肢について以下で詳細に議論する。続いて、ステップ308に示されるように、スパース化変換Ψ1を用いることによって差分画像がスパース化される。上記のとおり、スパース化変換Ψ1は、ウェーブレット変換、一次階差、二次階差、及び、離散グラデーション変換を含む、数学的演算のどの様な数でも良い。このスパース化された差分画像のL1ノルムがその後ステップ310で算出される。その後、ステップ312で、この処理の結果が正規化パラメータαによって重み付けされる。
【0071】
式(2)の目的関数の二番目の項、
【数21】
の初期化は、ステップ314で始まり、ここで、所望の画像Iの見積りがスパース化変換Ψ2を用いることでスパース化される。続いて、このスパース化された所望の画像見積りのL1ノルムがステップ316で算出される。スパース化変換Ψ2として離散グラデーション変換▽m,nが選択された場合、ステップ314及び316は所望の画像見積りの合計変化、TV、の算出としてみることができ、これは以下のように表わされる。
【0072】
【数22】
【0073】
スパース化された所望の画像見積りのL1ノルムが算出されると、ステップ318において、その結果が(1−α)により重み付けされる。続いてステップ320で、前記一番目の項と二番目の項を足し合わせることにより、式(2)の目的関数が作成される。この目的関数は、その後ステップ322で例えば非線形共役勾配法を用いて最小化される。この最小化処理は停止基準が満たされるまで続く。停止基準としては、例えば、現時点の所望の画像の見積りを前回の繰り返しからの所望の画像の見積りと比較することが挙げられる。そのような停止基準は以下のように表わされる。
【0074】
【数23】
【0075】
ここで、Iij(k+1)は画素位置(i,j)における(k+1)番目の所望の画像の見積りの値であり、Iij(k)は画素位置(i,j)におけるk番目の所望の画像の見積りの値である。
【0076】
図4を参照すると、本発明の方法の別の実施は、ステップ400で示されるように、式(3)の目的関数を用いてまず正規化パラメータαを初期化することから始める。続いて、ステップ402及び404に示されるように、式(3)の目的関数における一番目と二番目の項がそれぞれ初期化される。この処理は上記の図3のステップ302及び304と同じように実施される。しかしながら、ここでは、式(1)の一貫性の条件が三番目の項、
【数24】
に盛り込まれ、これは、ステップ406で初期化される。まず、ステップ408で差分行列Xが作成される。上で詳細に述べたように、差分行列Xは式(1)の一貫性の条件に対応するとともに次のように表わされる。
【0077】
【数25】
【0078】
したがって、システム行列Aを所望の画像の見積りIに適用し、続いて所望の画像に対応する取得された画像データYを差し引くことにより、差分行列が決定される。差分行列XのL2ノルムの二乗が、次のステップ410で算出される。差分行列XのL2ノルムの二乗が算出された後、ラグランジュ乗数λが決定され、これが、ステップ412で差分行列Xに重みを付けるために用いられる。上記のとおり、ラグランジュ乗数は、経験的に決定されるとともに目の前の臨床における応用に基づいてユーザにより選択される値である。続いてステップ420で、一番目、二番目、三番目の項を足し合わせることにより、式(3)の目的関数が作成される。この目的関数は、その後ステップ422で例えば非線形共役勾配法を用いて最小化される。この最小化処理は、上記のとおり、停止基準が満たされるまで続く。
【0079】
図5を参照すると、本発明の方法の別の実施は、ステップ500で示されるように、式(4)の目的関数を用いてまず正規化パラメータαを初期化することから始める。続いて、ステップ502及び504に示されるように、式(4)の目的関数における一番目と二番目の項がそれぞれ初期化される。この処理は上記の図3のステップ302及び304と同じように実施される。しかしながら、ここでは、式(1)の一貫性の条件及び撮像システムにおけるノイズの影響が、三番目の項、λ(XTDX)に盛り込まれ、この項はステップ506で初期化される。まず、上記の図4のステップ408と同様に、ステップ508で差分行列Xが作成される次に、システムノイズ行列Dがステップ510で作成される。システムノイズ行列Dは、次式で決定される行列要素を有する対角行列である。
【0080】
【数26】
【0081】
ここで、σn2は、ノイズ変化であり、本発明を実施する際に用いられる撮像システムにおけるノイズを示すパラメータである。例えば、X線撮像システムにおいては、ノイズパラメータσn2はn番目のX線検出器に関連するノイズ変化である。あるいは、MR撮像システムにおいては、ノイズパラメータσn2はn番目の受信コイルのノイズ変化である。
【0082】
σnは、本発明を実施する際に用いられる撮像システムにおけるノイズを示すノイズパラメータである。例えば、X線撮像システムにおいては、ノイズパラメータσnはn番目のX線検出器に関連するノイズである。システムノイズ行列Dが作成された後に、次の行列乗法が実施される。
【0083】
【数27】
【0084】
この行列乗法はステップ512で実施される。続いてステップ514で、ラグランジュ乗数よりこの演算の結果が見積もられる。続いてステップ520で、一番目、二番目、三番目の項を足し合わせることにより式(4)の目的関数が作成される。この目的関数は、その後ステップ522で例えば非線形共役勾配法を用いて最小化される。この最小化処理は、上記のとおり、停止基準が満たされるまで続く。
【0085】
本発明は、上記したように、多くの異なる医用撮像手段に適用され得るとともに、多くの異なる臨床における応用に利用され得る。そのような臨床における応用の例のいくつかが、本発明の広い範囲を描写するために以下に記載される。しかしながら、それらの実施形態は必ずしも本発明の全ての範囲を表すものではなく、本発明の範囲を説明するために請求の範囲及び本明細書が参照される。
【0086】
X線コンピュータ断層撮影
X線コンピュータ断層撮影(CT)及び核医学心筋血流撮像(MPI)を含む医用撮像において用いられるイオン化放射線への被ばくに関するリスクは、近年、CT及び核医学MPIの研究の顕著な増加とともに、非常に大きな課題となっている。心臓CT血管造影セッションからの影響のある放射線量は、弾性の患者において約5〜20mSv、女性の患者においてはそれ以上と報告されている。この放射線量は、静脈内への造影剤注入の前にルーチン的に行われるカルシウム評価CTスキャンからの前記放射線量よりも小さな放射線量に加えての量である。CT−MPIを広範囲な心臓CT研究の一部として実施するためには、約20〜30回、心臓の同じ領域にわたって画像を取得することが必要とされ、結果として放射線量が約二十倍から三十倍の増加となり、これは放射線被ばくの許容範囲を超えるレベルとなる。
【0087】
現在の心臓血管CT撮像においては、さらに重要な制限がある。特に、現在の心臓CT撮像方法は、患者のサブセットの全てにおいて良質な心臓の画像を提供するには不適切な時間分解能が問題となる。したがって、CT心臓血管撮像を用いて時間分解能を向上させることにより、より正確な診断が可能となり、さらに、安全でより効果的な治療介入が可能となり得る。
【0088】
X線多検出器コンピュータ断層撮影
現在の最新式多検出器型CT(MDCT)撮像システムのガントリー回転時間が短いにもかかわらず、時間的開口は、グローバル機能(放出(ejection)機能)の正確な測定こと、壁運動異常の評価、又は弁異常を評価するための弁運動の停止には不適切である。通常、グローバル機能及び局所的な壁運動異常を正確に評価するには、時間的開口が40〜50ミリ秒以下とされるべきである。さらに、現在の短いガントリー回転時間にもかかわらず、動きアーチファクトのない画像を取得する目的で心拍数を充分に遅くするために、薬理学的介入(例えばベータブロッカーの導入)がしばしば必要とされる。このことから、心臓刺激伝導障害やぜんそくなどの肺疾患を持つ患者にはベータブロッカーが禁忌であることから、上記のような方法の使用においては制限があるということが示される。これらは心臓CT血管造影の幅広い実施の追加の障害となる。
【0089】
MDCTにおいては、時間分解能は主にガントリー回転速度により制限される。画像を正確に再構成するためには、典型的には180度以上の角度範囲にわたって投影データが取得される。この角度範囲は、完全な円の約三分の二をカバーする。用いられる画像再構成アルゴリズム中の適切な重み付けが組み込まれると、MDCTの典型的な時間的開口は完全な回転に対してガントリー回転時間の50パーセントに制限される。最新式MDCTスキャナにおける時間分解能及び対応するガントリー回転速度を、以下で表1にまとめた。
【0090】
【表1】
【0091】
心臓MDCT撮像においては、時間分解能20ms以上を実現するためには、ガントリー回転周期約50ミリ秒が必要とされるが、これは現時点ではCT撮像システム上の機械的な制限により実現可能ではない。ガントリー速度が制限されていることから、セグメント化された再構成が時間分解能を向上させるため研究されている。セグメント化された再構成においては、単一の再構成に必要とされるデータカバー範囲は、同一の心拍フェーズにおける異なる心拍から選択された投影データで満たされている。セグメント化された再構成を用いることにより、時間分解能を向上させることができ得る。
【0092】
最良のシナリオにおいては、時間分解能をN倍向上させることができる(Nは用いられるセクターの数)。しかしながら、セグメント化された再構成は、一サイクルから次のサイクルへの心臓の動きの一貫性に大きく依存する。ガントリーは一回の心臓の鼓動の間に何度も回転することに注意されたい。セグメント化された再構成において心臓の鼓動が複数必要とされる場合、投影データが多くのガントリー回転にわたって分散される。したがって、ガントリー回転と心臓の鼓動との間の同期が可能なことから、異なる心拍から選択されるセグメントは、ショートスキャンデータセットを作成するために、しばしば結合されない。したがって、セグメント化されたデータセットの結合は、正確な画像再構成のための完全な投影データセットを提供しない。その結果、セグメント化された再構成における時間分解能向上が確実に達成されることはなく、したがって、セグメント化された再構成法が臨床診療で用いられるのはまれである。
【0093】
X線コンピュータ断層撮影撮像システム
図6(a)及び図6(b)をまず参照すると、X線コンピュータ断層撮影(CT)撮像システム610は、「第三世代」CTスキャナであるガントリー612を有する。ガントリー612には、X線614のファンビーム又はコーンビームをガントリーの反対側の検出器配列616へ向けて照射するX線源613が設けられている。検出器配列616は、患者615を通過する照射されたX線を感知する、複数の検出器要素618から形成される。各検出器要素618は、作用しているX線ビームの強度を示す電気信号、即ち患者を通過するにつれ減衰するビームを示す電気信号を生成する。X線投影データを取得するためのスキャン中、ガントリー612及びそこに取り付けられた構成要素が患者615内に位置する回転中心619の周りに回転する。
【0094】
ガントリーの回転及びX線源613の操作は、CTシステムの制御機構620により制御される。制御システム620には、X線源613に電力及びタイミング信号を与えるX線コントローラ622と、ガントリー612の回転速度及び位置を制御するガントリーモータコントローラ623とが設けられている。制御機構620内のデータ取得システム(DAS)624により、検出器要素618からアナログデータがサンプルされるとともに該データが後続の処理のためにデジタル信号に変換される。画像再構成装置625はサンプルされデジタル化されたX線データをDAS624から受信し、高速画像再構成を実行する。再構成された画像は、画像を大容量記憶装置628に保存するコンピュータ626に入力される。
【0095】
コンピュータ626はまた、オペレーターから、キーボードを有するコンソール630を介して、命令及びスキャニングパラメータを受信する。関連するディスプレイ632により、オペレーターは、コンピュータ626から、再構成された画像及びその他のデータを観察することができる。オペレーターにより与えられた命令及びパラメータはコンピュータ626により用いられて、DAS624、X線コントローラ626、ガントリーモータコントローラ623に制御信号及び情報が提供される。さらに、コンピュータ626によりテーブルモータコントローラ634が操作され、これによりモータで動くテーブル636が制御されて患者615をガントリー615内に配置する。
【0096】
X線コンピュータ断層撮影画像再構成
特に図7(a)を参照すると、心臓X線CT撮像システムにおいて実施された場合、本発明の方法は、対象の心臓の生理的動作を示す信号を取得することから始める。例えば、ステップ700で示されるように、対象からの心電図(ECG)信号の取得が初期化される。このECG信号は、取得された画像データをMこの異なる心拍フェーズPMにレトロスペクティブにゲート(gate)するために用いられる。例えば、図8を参照すると、3つの心拍フェーズP1,P2及びP3を、ECG信号800内の時間点から選択することができる。この例においては、第一心拍フェーズP1が、P波802の最後において等容性収縮フェーズ中として選択され、第二心拍フェーズP2が、QRS群804のピークにおいて速い駆出フェーズの始まりとして選択され、そして、第三心拍フェーズP3が、T波806の始まりにおいて減少した駆出フェーズの始まりとして選択される。通常、心拍フェーズの数はいくつ選択されてもよく、そして、ECG信号内の何れの時間点から選択されても良い。
【0097】
再び図7(a)を参照すると、ステップ702に示されるとおり、第一ビュー角θnにおいて投影ビューのセットの形で画像を取得することからデータ取得が始まる。ガントリーは続いてステップ400において新しいビュー角へと回転される。続いて、より多くの画像データが新しいビュー角θn+1において取得され、このプロセスは、決定ブロック706に示されるように、ガントリーが最後のビュー角θNまで回転されるまで繰り返される。全ての所望の画像データが取得されると、ステップ708に示されるように、ECG信号の取得が停止する。取得された画像は、続いて、ステップ710において、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。例えば、再び図8を参照すると、第一ゲーティングウィンドウW1中に取得された画像データの全てが、第一心拍フェーズP1に対応するものとして選択される。例えば、ゲーティングウィンドウ内に実質的に一つのビュー角しか存在しないように、20ミリ秒以下の狭いゲーティングウィンドウW1が用いられる。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズのそれぞれについての「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットには、与えられる心拍フェーズPmに対応するゲーティングウィンドウWm中に取得された複数の投影ビューが含まれる。あるいは、ECG信号中の特定の時間点においてのみ画像データが取得さるように、オリジナルの画像データの取得がプロスベクティブにゲートされる。このデータ取得スキームにしたがって、選択された心拍フェーズ中に取得された画像データの全てが、同様にして心拍フェーズ画像データセットとして結合される。
【0098】
各心拍フェーズ画像データセットは高度にアンダーサンプルされるため、周知のフィルタ補正逆投影(FBP)法などのスタンダードな画像再構成アルゴリズムを用いて画像を再構成する試みは、深刻なストリーキングアーチファクトを生ずる結果となる。したがって、再度図7(a)を参照すると、本発明の方法は、ステップ712で示されるように、先験的画像Ipを再構成することにより開始する。先験的画像Ipはステップ712においてFBP法などの従来の画像再構成法を用いて再構成される。特に、先験的画像Ipは、N個のビュー角θnにわたって取得される画像データの全てから再構成される。そのような先験的画像は、画像データが複数の異なる心拍フェーズにわたって取得されたことから、鼓動する心臓に関連する力学的情報を本質的に失うものの、この力学的情報は、各心拍位相の所望の画像を再構成する際に復元することができる。しかしながら、あるいは、例えば、同時係属の米国特許出願第11/482,372号に記載の高度に制限された逆投影(HYPR)、同時係属の米国特許出願第12/032,240号に記載のHYPR局所再構成(HYPR−LR)、及び同時係属の米国特許出願第12/032,262号に記載の繰り返しHYPR(I−HYPR)などの、その他の画像再構成法を用いて先験的画像Ipを再構成することができる。HYPR−LR法を用いることにより、例えば、所望の画像における信号ノイズ比(SNR)をさらに向上させることが可能である。
【0099】
画像再構成法を進行させると、与えられた心拍フェーズPmにおける所望の画像の見積りが、続いてステップ714で作成される。例えば、この見積りは、適切な心拍フェーズ画像データセットからFBP法を用いて再構成された画像である。あるいは、しかしながら、先験的画像Ipを用いることもできる。選択された心拍フェーズPmの所望の画像Iは、続いて図3、4及び5を参照して記載された上記の本発明の方法にしたがって、ステップ716に示されるように、再構成される。先験的画像Ipが良質の画像でないことから、先験的画像Ipの低品質による影響を軽減させるために、正規化パラメータαが選択される。例えば、値α≒0.3〜0.7が用いられる。このようにして、プロセスブロック718で決定されるように、所望の心拍フェーズの全てについての画像が再構成されるまで、所望の画像Iが各心拍フェーズPmについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ720において次の心拍フェーズPmを選択して、画像再構成法を進行する。
【0100】
上記のデータ取得スキームの例として、X線CT画像データが一回のガントリー回転内及び約12秒の息止め中で取得される。心拍数の平均が毎分75回(bpm)である患者においては、そのような画像データが15回の鼓動にわたって取得される。したがって、取得された画像データは前記15回の鼓動及び一回のガントリー回転にわたって広がる。この取得された画像データはその後異なる心拍フェーズにレトロスペクティブにゲートされる。例えば、ゲーティングウィンドウ内に実質的に一つのビュー角のみが存在するよう、20ミリ秒以下の狭いゲーティングウィンドウが用いられる。したがって、ゲーティング後、各心拍フェーズには約15個のビュー角のみが含まれる。高速ガントリー回転速度の代わりに、本発明は、実質的に低下したガントリー回転速度を用いて取得されたデータから良質の画像を再構成する方法を提供する。上記のようにして本発明を実施する場合、時間分解能はガントリー回転速度によって決定されるのではない。その代わり、時間分解能は、一つのコーンビーム投影の取得のための時間ウィンドウにより決定され、各コーンビーム投影の検出器の読み取り速度により決定される。
【0101】
上記のX線コンピュータ断層撮影画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが当業者にとって明らかとなる。例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。したがって、通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。
【0102】
X線多検出器型コンピュータ断層撮影画像再構成
本発明の方法は、低速ガントリー回転速度を用いて取得された画像データから高い時間解像度の画像が再構成される状況のみでなく、高速ガントリー回転速度が用いられる状況でも適用可能である。このようにして、本発明により、最新式X線多検出器コンピュータ断層撮影(MDCT)撮像システムの時間分解能が増加する。図7(b)を参照すると、X線MDCT撮像システムで実施される場合、本発明の方法は、ステップ750に示されるように、対象の心電図(ECG)信号を取得することから始まる。このECG信号は、取得された画像データをM個の異なる心拍フェーズPMにレトロスペクティブにゲートするために用いられる。
【0103】
データ取得は、続いて、ステップ752に示されるように、第一ビュー角θnにおける投影ビューのセットの形で、画像データを取得することから始まる。ガントリーは続いてステップ754で新しいビュー角へと回転される。新しいビュー角θn+1においてより多くの画像データが取得され、そして、このプロセスは、決定ブロック756で決定されるように、ガントリーが最後のビュー角θNへと回転されるまで繰り返される。所望の画像の全てが取得されると、ステップ758で示されるように、ECG信号の取得が停止される。取得された画像データは、続いて、ステップ760で、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。例えば、再度図8を参照すると、第一ゲーティングウィンドウW1中に取得された画像データの全てが、第一心拍フェーズP1に対応するように選択される。例えば、最新式のMDCT撮像システムにおいては、150ミリ秒以下のゲーティングウィンドウW1が用いられる。そのようなゲーティングウィンドウは、例えば、いわゆるショートスキャン角度範囲と呼ばれる約240度(180度足すファン角)の角度範囲にわたってX線管が移動する継続時間に対応する結果となる。したがって、ゲートウィンドウ内にはN≒640個のビュー角が存在する。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズのそれぞれについて、「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットには、与えられた心拍フェーズPmに対応するゲーティングウィンドウWm中に取得される複数の投影ビューが含まれる。あるいは、画像データがECG信号中の特定の時間点においてのみ取得されるように、オリジナルの画像データ取得がプロスペクティブにゲートされる。このデータ取得スキームに従うと、選択された心拍フェーズ中に取得される画像データの全てが、沿うようにして、心拍フェーズ画像データセットとして結合される。
【0104】
各心拍フェーズ画像データセット(240度の角度範囲及び640個の投影ビュー角)が正確な画像再構成のため充分にサンプルされることから、スタンダードな画像再構成法、例えば周知のフィルタ補正逆投影(FBP)法が用いられて画像が再構成される。しかしながら、制限された心拍ウィンドウ幅W1に起因して、再構成された画像の時間解像度は、ガントリー回転時間の約半分に制限される。この事実は、上記の表1に示される時間分解能値の根本にある原因である。したがって、ガントリー回転速度を変更することなく時間分解能を何倍にも増加させるように、本発明が実施される。特に、再び図7(b)を参照すると、本発明の方法は、ステップ762に示されるように、先験的画像Ipを再構成することから開始する。先験的画像Ipはステップ762においてFBP法などの従来の画像再構成法を用いて再構成される。特に、先験的画像Ipは、ゲーティングウィンドウW1内でN個のビュー角θnにわたって取得される画像データの全てから再構成される。
【0105】
幅W1を有する通常のゲーティングウィンドウは、その後、各々が幅W1/Lを有する合計L個のより狭いサブウィンドウ又は「時間ウィンドウ」に分割され、そして、ステップ764で示されるように、心拍フェーズ画像データセットはこれらのサブウィンドウを用いてさらにゲートされる。例えば、ゲーティングウィンドウW1が2、3、又は4個の同等のセクションにそれぞれ分割されるように、Lの値を、2、3、又は4となるように選択することができる。さらに、これらの値は、時間分解能の、2、3、又は4倍の増加に対応する。各サブウィンドウについて、投影ビュー角範囲は、L倍減少する。例えば、通常の心拍ウィンドウ幅に対応する典型的な角度範囲は、約240度である。しかしながら、ゲーティングウィンドウを2つのサブウィンドウに分割すると、各サブ分割された心拍フェーズ画像データセット、又は「心拍サブフェーズ」画像データセットにおける角度範囲は120度となる。したがって、心拍サブフェーズ画像データセットから心拍画像を正確に再構成するためにFBPなどの従来の画像再構成法を用いることはできない。したがって、L個の心拍サブウィンドウについて心拍画像を正確に再構成するために、本発明が適用される。
【0106】
画像再構成法を進めると、ステップ766において、与えられた心拍サブフェーズPm,l(l=1,2,...L)についての所望の画像の見積りが続いて選択される。例えば、個の見積りは、FBP法を用いて適切な心拍フェーズ画像データセットから再構成される画像であり得る。あるいは、しかしながら、先験的画像Ipを用いることもできる。選択された心拍サブフェーズPm,lの所望の画像Iは、続いて、ステップ770において、図3、4及び5を参照して上記された本発明の方法に従って、再構成される。先験的画像Ipが時間解像度の高い画像ではないことから、いくつかの動きぼけ及び動きストリークが先験的画像Ipに現れる。したがって、先験的画像Ipの低品質による影響を軽減させるために正規化パラメータαが選択される。例えば、値α≒0.5〜0.8が用いられる。このようにして、プロセスブロック770で決定されるように、所望の心拍フェーズの全てについての画像が再構成されるまで、所望の画像Iが各心拍フェーズPm,lについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ772において次のサブ心拍フェーズPm,lを選択して、画像再構成法を進行する。与えられた心拍フェーズPmについて全ての心拍サブフェーズ画像が再構成されると、ステップ774において新たな心拍フェーズが選択され、そして、決定ブロック776で決定されるように、通常の心拍フェーズPmが全て用いられるまで、上記の処理が繰り返される。
【0107】
上記のX線多検出器型コンピュータ断層撮影画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが、当業者にとって明らかとなる。例えば、時間解像度の低い先験的画像を用いる、より高い時間解像度の画像を再構成するための上記方法を、よりさらに高い時間解像度を達成するために繰り返し実行することができる。また、例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。したがって、通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。さらに、時間ウィンドウに基づいて動きフェーズ画像データセットを分割することで「動きサブフェーズ画像データセット」を作成することができるように、各ゲーティングウィンドウを複数の「時間ウィンドウ」に分割することができる。
【0108】
C−Arm X線撮像
血管造影C−armシステムは、向上した画像ガイダンスのための軟組織造影を提供する、介入室内におけるコーンビームCTデータ取得を可能とするために、さまざまなベンダーにより修正されてきた。このことは、高コントラストのヨウ素入り血管のみが再構成されるような、従来の回転式血管造影データ取得に対する、重要な進歩を示す。ガントリー回転速度が低速であることにより、C−armコーンビームCTは主に神経介入的過程に適用される。
【0109】
良質な非侵襲的な心拍撮像は、安全で効果的なカテーテルベースの治療介入のため、特に、治療前プラニング、治療中ガイダンス、及び治療後フォローアップのために極めて重要である。カテーテルベースの治療の大部分は、制限された2D投影撮像により減少した情報を提供するX線透視(XRF)ガイダンスを用いて実施される。スタンダードなXRFを用いる場合のさらなる、そして重要な制限として、例えば血管や心室などの複雑な3D解剖学的構造の描写の質が低いことが挙げられる。この制限に対して、MRI、CT、3D超音波、及びXRFと組み合わされた電磁気ナビゲーションシステムなどの3D手段が、現在検討中である。この事実にもかかわらず、正確な3Dから2Dへの画像レジストレーションはいまだに重要なチャレンジとして残されている。2つの主な介入的応用が、その優れた画像ガイダンスのために、注目をあびている。一つ目は、閉塞性アテローム性動脈硬化のための経皮冠動脈インターベンション(PCI)であり、二つ目は、発作性心房細動のための肺静脈隔離(PVI)である。これらの状況下においては、良質の3D断層撮影画像を取得するものと同じ撮像システムの初期設定を実時間蛍光透視法モードにすることができ、即時カテーテルベース治療介入が可能となる。即時的に取得されるとともに自動的にレジスターされた時間分解3D断層撮影画像により、向上した治療ガイダンスが容易となり、イオン化された放射線量を大幅に減少させることができ、そして、特定の治療介入における腎毒性のある造影剤の量を大幅に減少させることができる。さらに、治療前、治療中、治療後の3D心臓コーンビームCT評価を容易に実施することができる。典型的な介入室におけるガントリー回転周期は遅く(5〜10秒)、したがって、従来の心臓CT撮像パラダイムを用いて高い時間分解能を得ることが防止される。
【0110】
C−Arm X線撮像システム
特に図9(a)及び9(b)を参照すると、画像再構成に用いられる本発明の実施形態は、介入手順に関連させて用いられるよう設計されたX線システムを用いる。前記X線システムの特徴として、X線源アセンブリ912を一端に有するとともにX線検出器配列アセンブリ914を他端に有するC−arm910が設けられたガントリーを有している。該ガントリーにより、X線源912及び検出器914がテーブル916上に配置された患者の周りの異なる位置に異なる角度で配向されるとともに、医師が患者に近づくことを可能としている。
【0111】
前記ガントリーは、テーブル916の下側に延びる水平レッグ920とテーブル916から離間し且つ該水平レッグ920の一端から上方に延びる鉛直レッグ922とが設けられたL型の台座918を有している。鉛直レッグ922の上端には、水平中心軸926の周りに回転するよう回転可能に取り付けられた支持アーム924が取り付けられている。中心軸926はテーブル916の中心線に沿うよう配され、アーム924は該中心軸926から半径方向に外側に延びているとともにその外側端にC−arm駆動アセンブリ927を支持している。C−arm910は、駆動アセンブリ927にスライド可能に取り付けられているとともに、矢印930で示されるようにC−arm910をスライドさせC軸928の周りに回転させる駆動モータ(図示せず)に連結されている。中心軸926及びC軸928は、テーブル916の上方に位置するアイソセンター936において互いに直角に交わる。
【0112】
C−arm910の一端にはX線源アセンブリ912が、他端には検出器配列アセンブリ914が搭載されている。以下で詳細に述べるように、X線源912から、検出器配列914に向けられたX線のコーンビームが放射される。このコーンビームの中心線がシステムのアイソセンター936を通過するように、アセンブリ912及び914の両方が中心軸926へ向けて半径方向内側に延びている。コーンビームの中心線は、従って、テーブル916上に配置された対象からX線減衰データを取得している間、システムのアイソセンターを中心として中心軸926の周り又はC軸928の周りの何れかもしくはその両方の周りに回転する。
【0113】
図10(a)に示されるとおり、X線源アセンブリ912には、励起されるとX線のコーンビーム933を放出するX線源932が設けられている。中心線934はシステムアイソセンター936を通過し、検出器アセンブリ914内に収容された二次元フラットパネルデジタル検出器938上に作用する。検出器938は、2048x2048画素の、41cmx41cmの寸法を有する検出器要素の二次元配列である。各検出器要素により、作用するX線の強度を示す電気信号を生成し、したがって患者を通過するにつれ減衰するX線の強度を示す電気信号を生成する。スキャン中、異なる角度からX線減衰投影データを取得するために、X線源932及び検出器配列938がシステムのアイソセンター936の周りを回転する。検出器配列は毎秒30個の投影又は30個のビューを取得することができ、これは、所定のスキャン経路及び速度においてビューがいくつ取得されるかを決定する、制限因子である。
【0114】
特に図9(b)を参照すると、アセンブリ912及び914の回転とX線源932の操作が、CTシステムの制御機構940により制御される。制御機構940には、電力を供給しX線源932にタイミング信号を提供するX線コントローラ942が含まれる。制御機構940内のデータ取得システム(DAS)944は、検出器要素938からデータをサンプルして該データを画像再構成装置945に提供する。画像再構成装置945は、デジタル化されたX線データをDAS944から受けとり、本発明の方法に従って高速画像再構成を実行する。再構成された画像は、大容量記憶装置949内に画像を保存又は画像をさらに処理するコンピュータ946に、入力される。
【0115】
制御機構940には、また、中心軸モータコントローラ947とC軸モータコントローラ948とが設けられている。モータコントローラ947、948は、コンピュータ946からの動作命令に応じて、中心軸926及びC軸928のそれぞれの周りの回転を生じさせる、X線システム内のモータに電力を与える。コンピュータ946により実行されるプログラムにより、アセンブリ912、914を所定のスキャン経路内で動かすモータドライブ947、948への動作命令が作成される。
【0116】
コンピュータ946はまたオペレーターから、キーボード及びその他の手動操作可能な制御部を有するコンソール950を介して、命令及びスキャンパラメータを受け取る。関連するブラウン管ディスプレイ952によって、オペレーターは、コンピュータ946からの再構成された画像及びその他のデータを観測することができる。オペレーターにより供給された命令は、コンピュータ946により用いられ、保存されたプログラムの指示に従ってDAS944に制御信号及び情報を与える。加えて、コンピュータ946は、モータ付きテーブル916を制御して患者をシステムアイソセンター936に対して位置決めするテーブルモータコントローラ954を操作する。
【0117】
図10(d)に示されるように、このスキャン経路の実行は、中心軸モータコントローラ847とC軸モータコントローラ849とを同時に操作して、アイソセンター936の下方でX線源832を円形軌道又は楕円軌道に動かすとともにアイソセンター936の上方の対応する円形軌道に検出器938を動かすことによりなされる。円形軌道の寸法は数々の因子により決定されるものの、経路の閉じた領域を可能な限り大きくすることが目的である。制限的因子は、造影剤の流入中に生じる動的変化をとらえるために必要なフレームレートで、単一の断層撮影された(tomosynthesis)データセットを取得するよう、ガントリーが円形軌道の全体に渡って動くべきである、ということである。本発明におけるこの実施形態においては、このようにして、最大10個の画像データセットが取得される。
【0118】
C−Arm X線画像再構成
上記したように、同じX線C−arm撮像システムを用いて良質な3Dの断層撮影された画像及びリアルタイム透視画像を取得することができ、直接的なカテーテルベースの治療介入が可能となり、この詳細は、例えば、米国特許第7,218,702号に記載されている。このようにして、時間分解された3D断層撮影画像がすぐに取得されるとともに自動的にレジスターされて、治療ガイダンスが改善される。これにより、イオン化放射線量が減少するだけでなく、特定の治療介入においては腎毒性の造影剤量が減少する。さらに、この可能性により、治療前、治療中、及び治療後の3D心臓コーンビームCT評価が、記載されるとおり可能となる。
【0119】
したがって、X線C−arm撮像システムにおいて実施された場合、本発明の方法は、特に図7(a)を参照して上に記載した様に進行する。特に図11を参照すると、3Dコンピュータ断層撮影モードにおける動作時、前記方法は、ステップ1100において、対象から心電図(ECG)信号を取得することから始まる。このECG信号は、取得された画像データをM個の異なる心拍フェーズPMにレトロスペクティブにゲートするために用いられる。続いてステップ1102において、第一ビュー角θnにおける投影ビューのセットの形で画像データを取得することによりデータの取得が始まる。続いてステップ1104において、ガントリーが新しいビュー角へと回転され、そこで画像データが取得される。このプロセスは、決定ブロック1106で示されるように、ガントリーが最後のビュー角θNにまで回転されるまで繰り返される。所望の画像データが全て取得されると、ステップ1110において、ECG信号の取得が停止する。取得された画像データは続いて、上に詳細に記載したように、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズの各々について「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットは、与えられた心拍フェーズPmに対応するゲーティングウィンドウWm中に取得される複数の投影ビューを含む。あるいは、画像データがECG信号中の特定の時間ポイントにおいてのみ取得されるよう、オリジナルの画像データ取得をプロスペクティブにデートすることが可能である。このデータ取得スキームに従うと、選択された心拍フェーズ中に取得された画像データの全てが、心拍フェーズ画像データセットに同様に結合される。
【0120】
各心拍フェーズ画像データセットは高度にアンダーサンプルされていることから、周知のフィルタ補正逆投影(FBP)法などのスタンダードな画像再構成アルゴリズムを用いて画像を再構成しようという試みは、顕著なストリーキングアーチファクトを生ずる結果となる。したがって、本発明の方法は、ステップ1110において先験的画像Ipを再構成することから始まる。先験的画像Ipはステップ1112においてFBP法などの従来の画像再構成法を用いることで再構成される。特に、先験的画像IpはN個のビュー角θnにわたって取得された画像データの全てから再構成される。そのような先験的画像は、画像データが複数の異なる心拍フェーズにわたって取得されるため、鼓動する心臓に関連する力学的情報を本質的に失うこととなる。しかしながら、この力学的情報は、各心拍フェーズの所望の画像を再構成する時にリカバーされる。しかしながらあるいは、その他の例えばHYPR、HYPR−LR及びI−HYPRなどの画像再構成法を用いて先験的画像Ipを再構成することが可能である。例えばHYPR−LR法を用いることにより、所望の画像における信号対ノイズ比(SNR)をさらに増加させることが可能となる。
【0121】
画像再構成法と並行して、与えられた心拍フェーズPmについての所望の画像の見積りが、ステップ1114において作成される。例えば、この見積りは、適切な心拍フェーズ画像データセットからFBP法を用いて再構成された画像であり得る。しかしながらあるいは、先験的画像Ipを用いることも可能である。ステップ1116において、選択された心拍フェーズPmの所望の画像Iが、続いて、図3、4及び5を参照して上記したように本発明の方法にしたがって再構成される。先験的画像Ipが良質の画像でないことから、先験的画像Ipの質の悪さによる影響を緩和するために正規化パラメータαが選択される。例えば、α≒0.3〜0.7の値が用いられる。プロセスブロック1118において決定されるように、所望の画像Iが、この様にして、所望の心拍フェーズの全ての画像が再構成されるまで、各心拍フェーズPmについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ1120において次の心拍フェーズPmを選択して画像再構成法を進行させる。
【0122】
3D断層撮影撮像が完了すると、ステップ1122においてX線C−arm撮像システムがX線透視モードに戻る。心臓カテーテル法工程などの治療介入工程が、続いて、本発明の方法を用いて再構成された良質の3D断層撮影画像からの増加した画像ガイダンスを用いて実施される。対象が一つの撮像システムから次の撮像システムへと物理的に移動されないことから、3D断層撮影画像の撮像ボリューム及び続いて取得される2DX線透視画像が自動的にレジスターされる。これにより、CT画像によりガイドされる治療介入工程の信頼性が向上する。
【0123】
上記のX線C−arm画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが当業者にとって明らかとなる。例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。したがって、通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。
【0124】
磁気共鳴撮像システム
本発明はまたその他の医用撮像手段にも特に適用することができる。そのような撮像手段の一つは磁気共鳴撮像(MRI)である。特に図12に示されるように、本発明の方法はMRIシステムにおいても用いることができる。MRIシステムには、ディスプレイ1212及びキーボード1214を有するワークステーション1210が設けられている。ワークステーション1210には、市販の演算システムを実行するプログラム可能な市販のプロセッサ1216が含まれる。ワークステーション1210により、オペレーターはスキャンに関する指示をMRIシステムに入力することができる。ワークステーション1210は4つのサーバを有し、それらは、パルスシーケンスサーバ1218、データ取得サーバ1220、データ処理サーバ1222、データ記憶サーバ1223である。ワークステーション1210と各サーバ1218、1220、1222、1223は互いに接続されて連通している。
【0125】
パルスシーケンスサーバ1218は、ワークステーション1210からダウンロードされた指示に応答して勾配システム1224及びRFシステム1226を動作させる役割をする。所定のスキャンを実行するために必要とされる勾配波形が作成されて、勾配システム1224に提供され、アセンブリ1228内の勾配コイルが励起されて、位置エンコードMR信号に用いられる磁場勾配Gx,Gy,Gzが作成される。勾配コイルアセンブリ1228は、分極磁石1232と全身RFコイル1334とを含む磁石アセンブリ1230の一部を形成する。
【0126】
RFシステム1226により、RFコイル1234にRF励起波形が与えられて、所定の磁気共鳴パルスシーケンスが実行される。RFコイル1234又は別個の局所コイル(図12には図示されない)により検出される応答MR信号は、パルスシーケンスサーバ1218により作成される命令に基づき、RFシステム1226により受信されて、増幅されて、復調されて、フィルタ処理されて、そして、デジタル化される。RFシステム1226は、MRパルスシーケンスに用いられる様々なRFパルスを作成するRFトランスミッターを備えている。RFトランスミッターは、スキャンに関する指示及びパルスシーケンスサーバ1218からの指示に応答して、所望の周波数、位相及びパルス振幅波形を有するRFパルスを作成する。発生したRFパルスは、全身RFコイル1234又は一以上の局所コイルまたはコイル配列(図12には図示されない)に与えられても良い。
【0127】
RFシステム1226にはまた一以上のRF受信チャンネルが設けられている。各RF受信チャンネルは、該RF受信チャンネルが接続されるコイルにより受信されるMR信号を増幅するRF増幅器と、受信されたMR信号の直角成分I及びQを検出してデジタル化する検出器と、を備える。したがって、受信されたMR信号の大きさは、サンプルされたどの点においても、下記のように成分I及びQの二乗の和のルートをとることにより結成される。
【0128】
【数28】
【0129】
さらに、受信されたMR信号の位相は下記のように決定される。
【0130】
【数29】
【0131】
パルスシーケンスサーバ1218はまた、生理的取得コントローラ1236から患者のデータを任意的に受信する。コントローラ1236は、患者に接続された数々の異なるセンサからの信号、例えば電極からのECG信号又は肺からの呼吸器官の信号、を受信する。そのような信号は通常パルスシーケンスサーバ1218により用いられて、対象の呼吸や心拍とスキャンの実行とがシンクロ又は「ゲート(gate)」される。
【0132】
パルスシーケンスサーバ1218はさらに、種々のセンサからの患者の状態に関する信号又はMRIシステムからの信号を受信するスキャン室インターフェース回路1238と接続する。さらに、スキャン中、患者位置決めシステム1240は患者を所望の位置に移動させるための命令を、スキャン室インターフェース回路1238を介して受信する。
【0133】
RFシステム1226により作成されたデジタル化されたMR信号サンプルは、データ取得サーバ1220によって受信される。このデータ取得サーバ1220は、ワークステーション1210からダウンロードされる指示に応答して動作し、リアルタイムのMRデータを受信し、そして、データのオーバーランによりデータが失われないようバッファー記憶装置を提供する。いくつかのスキャンにおいては、データ取得サーバ1220は、取得されたMRデータをデータ処置サーバ1222に渡すだけでなく、それ以上の機能も果たす。しかしながら、スキャンのさらなる実行を制御するために取得されたMRデータから得られる情報を要するスキャンにおいては、データ取得サーバ1220は、そのような情報を作成してパルスシーケンスサーバ1218に伝えるようプログラムされている。例えば、プレスキャン中、MRデータは取得され、そして、パルスシーケンスサーバ1218により実行されるパルスシーケンスを調整するために用いられる。また、スキャン中、ナビゲータ信号が取得され、RF又は勾配システム演算パラメータを調整するため、又は、k空間がサンプルされるビューのオーダーを制御するために用いられる。さらに、データ取得サーバ1220は、MRAスキャンにおける造影剤の到着を検出するために用いられるMR信号を処理するために用いられても良い。これらの例の全てにおいて、データ取得サーバ1220は、MRデータを取得し、それをリアルタイムで処理して、スキャンを制御するために用いられる情報を作成する。
【0134】
データ処理サーバ1222は、データ取得サーバ1220からMRデータを受信し、それをワークステーション1210からダウンロードした命令に基づいて処理する。そのような処理には、例えば、生のk空間MRデータのフーリエ変換をして二次元又は三次元画像を作成すること、再構成された画像にフィルタを適用すること、取得されたMRデータの逆投影画像再構成を実行すること、機能的MR画像の計算、そして、動作画像又は流動画像の計算など、が含まれる。
【0135】
データ処理サーバ1222により再構成された画像は、ワークステーション1210へと戻され、そこに保存される。リアルタイムの画像は、データベースキャッシュメモリ(図示せず)に保存され、そこから、オペレーターのディスプレイ1212又は磁性体アセンブリ1230の近くに配置される、看護する医師により用いられるためのディスプレイ1242に出力される。バッチモード画像又は選択されたリアルタイム画像は、ディスクストレージ1244のホストデータベースの中に保存される。そのような画像が再構成されてストレージに送られると、データ処理サーバ1222によりワークステーション1210のデータ記憶サーバ1223に通知される。ワークステーション1210は、画像をアーカイブに保管するため、フィルムを作成するため、またはネットワークを介して画像をその他の機関に送るためにオペレーターにより用いられてもよい。
【0136】
CTシステムのように、MRIシステムは、多くの異なる臨床における応用を有し、その中で二次元又は三次元何れかのセットの投影ビューが取得され、一又はそれ以上の患者の画像を再構成するために用いられる。CTシステムにより取得される投影ビューにはラドン空間サンプルが含まれる一方、MRIシステムにより取得される投影ビューにはk空間(又はフーリエ空間)サンプルが含まれる。MRIシステムにより取得されたデータを用いる画像再構成は、必要に応じて、k空間から実空間への変換が要求され、又は、中間のステップとして、ラドン空間への変換が要求される。
【0137】
磁気共鳴撮像パルスシーケンスの例
図12を参照して上記されたようなMR撮像システムを用いた本発明の実施においては、図13に示されるような投影再構成、又はラジアル、パルスシーケンスを用いて、アンダーサンプルされた画像が取得される。これは、選択的な非シンメトリー切断シンク(truncated sinc)RF励起パルス1300がスライス選択勾配1302の存在下で作成される高速勾配リコールエコー (fast gradient-recalled echo)パルスシーケンスである。このパルスシーケンスは、単一k空間円形平面内でサンプリングされることによってk空間平面単一の二次元スライスを取得するために用いられてもよく、又は、図14の1404、1406及び1408により示されるように複数の円形k空間平面をサンプルするために用いられても良い。複数の二次元スライスが取得されると、勾配1302はスラブ状の選択勾配(slab select gradient)となり、その後に位相エンコーディング勾配ローブ(phase encoding gradient lobe)1310及び逆の分極を有する巻き取り勾配ローブ(rewinder gradient lobe)1312が続く。この、軸の位相エンコーディング勾配1310は、スキャン中、各二次元k空間平面1404、1406及び1408からサンプルするために、値にわたってステップされる(stepped through values)。
【0138】
二つの面内読み出し勾配1314及び1316は、NMRエコー信号1318の取得中に再生されて、二次元平面1404、1406又は1408内のk空間が、放射線状のトラジェクトリに沿ってサンプルされる。これらの面内勾配1314及び1316は、軸勾配に対して垂直であるとともに互いに対して垂直である。スキャン中、これらは、放射線状のサンプリングトラジェクトリのビューアングルを回転するために、一連の値に渡ってステップされ、このことは後に詳細に記載する。プレ位相勾配ローブ(prephasing gradient lobe)1320及び1322が面内読み出し勾配のそれぞれに先行し、その後に巻き戻し勾配ローブ1324及び1326が続く。
【0139】
k空間縁境界上の一点からk空間の中心を通ってk空間縁境界上の反対側の点まで延びる好適な直線トラジェクトリとは別のサンプリングトラジェクトリが用いられても良いことは、当業者にとって明らかである。上記したとおり、一つのバリエーションには、サンプルされたk空間容積の全範囲に渡って延びていないトラジェクトリに沿ってサンプルを行う部分的NMRエコー信号1303を取得することが含まれる。直線投影再構成パルスシーケンスに相当する別のバリエーションでは、直線よりもむしろ屈曲した経路に沿ってサンプルが行われる。そのようなパルスシーケンスは、例えば、F.E.Boadaら著の「高速三次元ナトリウム撮像」、Magnetic Resonance in Medicine、1997;37:706−715、及び、K.V.Koladiaら著の「スパイラル投影撮像を用いた高速3D PC−MRA」、Proc.Intl.Soc.Magn.Reson.Med.13(2005)、及び、J.G.Pipe及びK.V.Koladia著の「スパイラル投影撮像:新しい高速3Dトラジェクトリ」、Proc.Intl.Soc.Mag.Reson.Med.13(2005)に記載されている。さらに、本発明を、これらのサンプリング方法の三次元及び二次元バージョンに用いても良いこともまた、明らかである。また、明細書中に用いられる「画素(pixel)」なる語は二次元又は三次元の何れかの場所を指すことを意図して用いられることも明らかである。さらに、多数のパルスシーケンス及びサンプリングパターンを用いて取得されるアンダーサンプルされた画像データから画像を再構成するために、本発明を用いることができ、このことは当業者にも理解される。
【0140】
上記したMRIシステムは、一以上の画像を再構成するために用いられ得る二次元又は三次元何れかの投影ビューのセットを取得するために、多岐にわたる臨床における応用に用いられることができる。本発明の画像再構成法は、取得される投影ビューの全てよりも少ない数を用いて一以上の画像フレームが再構成されるスキャンにおいて、特に有用である。
【0141】
磁気共鳴画像再構成
特に図15を参照すると、図12に示される上記したようなMR撮像システムにおいて実施される場合、本発明の方法は、ステップ1500において、対象から心電図(ECG)信号を取得することから始まる。このECG信号は、取得された画像データをM個の異なる心拍フェーズPMにレトロスペクティブにゲートするために用いられる。次に、ステップ1502において、一連のアンダーサンプルされたk空間データセットの形の画像データが取得される。上記したように、一連のアンダーサンプルされたラジアルインターリーブを用いてk空間をサンプルする図13に示されるようなパルスシーケンスを実行するようにMR撮像システムを指示することにより、アンダーサンプルされた画像データが取得される。例えば図16にはk空間サンプリングパターンの例が示されている。上記したように、各所望の画像フレームについて取得されるk空間データは、研究の時間分解能を高めるために高度にアンダーサンプルされる。さらに、各アンダーサンプルされた画像フレームについて取得された投影ビューは、その他の画像フレームについて取得された投影ビューを用いてインターリーブされる。例えば、点線1600で示されるk空間サンプリング、破線1602で示されるk空間サンプリング及び実線1604で示されるk空間サンプリングを用いて取得された投影は、k空間の同じ場租をサンプルしないよう、その全てが互いにインターリーブされる。これらのサンプリングパターンの各々は個別の画像フレームに対応する。データの取得が完了すると、ステップ1504において、ECG信号の取得が停止する。取得された画像データは続いて、ステップ1506に示されると共に上で詳細に記載したように、M個の異なる心拍フェーズPmにレトロスペクティブにゲートされる。このレトロスペクティブなゲーティングにより、M個の異なる所望の心拍フェーズの各々について「心拍フェーズ画像データセット」が作成される。したがって、各心拍フェーズ画像データセットは、与えられた心拍フェーズPmに対応するゲーティングウィンドウWm中に取得される複数の投影ビューを含む。あるいは、画像データがECG信号中の特定の時間ポイントにおいてのみ取得されるよう、オリジナルの画像データ取得をプロスペクティブにデートすることが可能である。このデータ取得スキームに従うと、選択された心拍フェーズ中に取得された画像データの全てが、心拍フェーズ画像データセットに同様に結合される。
【0142】
各心拍フェーズ画像データセットは高度にアンダーサンプルされていることから、上記の再グリッド法などのスタンダードな画像再構成アルゴリズムを用いて画像を再構成しようという試みは、顕著なストリーキングアーチファクトを生ずる結果となる。したがって、本発明の方法は、ステップ1508において先験的画像Ipを再構成することから始まる。
【0143】
先験的画像Ipは連続的なk空間インターリーブから取得されたデータを結合する画像データセットから作成される。さらに、先験的画像は、複数の異なるk空間インターリーブを累積する又は平均化することにより作成される。そのような先験的画像は、画像データが複数の異なる心拍フェーズにわたって取得されるため、鼓動する心臓に関連する力学的情報を本質的に失うこととなる。しかしながら、この力学的情報は、各心拍フェーズの所望の画像を再構成する時にリカバーされる。しかしながらあるいは、その他の例えばHYPR、HYPR−LR及びI−HYPRなどの画像再構成法を用いて先験的画像を再構成することが可能である。例えばHYPR−LR法を用いることにより、所望の画像における信号対ノイズ比(SNR)をさらに増加させることが可能となる。
【0144】
画像再構成法と並行して、与えられた心拍フェーズPmについての所望の画像の見積りが、ステップ1510において作成される。例えば、この見積りは、適切な心拍フェーズ画像データセットから再グリッド又はその他の従来のMR画像再構成法を用いて再構成された画像であり得る。しかしながらあるいは、先験的画像Ipを見積り画像として選択することも可能である。ステップ1512において、選択された心拍フェーズPmの所望の画像Iが、続いて、図3、4及び5を参照して上記したように本発明の方法にしたがって再構成される。先験的画像Ipが良質の画像でないことから、先験的画像Ipの質の悪さによる影響を緩和するために正規化パラメータαが選択される。例えば、α≒0.3〜0.7の値が用いられる。プロセスブロック1514において決定されるように、所望の画像Iが、この様にして、所望の心拍フェーズの全ての画像が再構成されるまで各心拍フェーズPmについて再構成される。所望の画像の全てが再構成されていない場合、前記方法は、ステップ1516において次の心拍フェーズPmを選択して画像再構成法を進行させる。
【0145】
上記の磁気共鳴画像再構成法においては、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることが当業者にとって明らかとなる。例えば、呼吸ベルトなどの呼吸モニタリング装置及び測定された呼吸情報に基づきレトロスペクティブにゲートされた画像データにより、対象の呼吸をモニターすることができる。このようにして、画像再構成時に内臓の動きなどの動きが補正される。同様にして、対象の動きが、データ取得処理中にナビゲータ信号を取得することによりモニターされる。ナビゲータ信号中の情報を用いることにより、上記したように、画像データが続いてレトロスペクティブにゲートされる。さらに、対象の呼吸をモニターすることにより、過分極ヘリウム3MR撮像などの肺の撮像を、向上した時間分解能を用いて実行することができる。通常、本発明の方法は対象の動きを示す信号であればどのような信号を用いて、取得された画像データを、複数の「動きフェーズ画像データセット」にゲート又は分割することができる。
【0146】
陽電子放出型断層撮影システム
特に図17を参照すると、PETスキャナシステムには、検出器リングアセンブリ1711を中心開口又は穴部1712の周りで支持するガントリー1710が含まれる。ガントリーコントローラ1717は、ガントリー1710内に搭載されるとともに、オペレータワークステーション1715から第二シリアル通信リンク1718を介して受信される命令に応答してガントリーを操作する。
【0147】
検出器リング1711は検出器ブロック1720から構成される。各ブロック1720はシンチレータ結晶光電子増倍管のセットを含む。取得回路1725のセットはガントリー1710内に搭載されて検出器リング1711内の各モジュール1720から信号を受信する。取得回路1725によりシンチレータ結晶の各ブロック内の事象座標が決定され、これらの座標(x,z)は結晶ブロック信号の和とともにデジタル化され、ケーブル1726を介して別個のキャビネット1728内に収容された事象ロケータ回路1727に送られる。各取得回路1725はまた、シンチレーション事象が起きた正確な時点を示す事象検出パルス(EDP)を作成する。
【0148】
事象ロケータ回路1727は、取得回路1725により作成された信号を周期的にサンプルするデータ取得プロセッサ1730の一部を形成する。プロセッサ1730は、バックプレーンバス構造1731と、該バス1731上の通信を制御するとともにプロセッサ1730をローカルエリアネットワーク1718にリンクする取得CPU1729と、を有する。事象ロケータ1727は、各々がケーブル1726と接続すると共にガントリー1710内の対応する取得回路1725から信号を受信する、別個の回路基板のセットから構成される。事象ロケータ1727は、取得回路1725により作成される事象パルス(EDP)を検出して、それをそのサンプル周期内のシンチレーション事象が起きた時を示す8ビット時間指標に変換することにより、事象とプロセッサ1730の動作とを同期させる。また、この回路1727は、シンチレーションの総エネルギーが511keV±20%の範囲の外にある場合には検出された如何なる事象を破棄する。各サンプル周期中、各有効事象に関する情報は、事象が起きた時と該事象を検出したシンチレータ結晶の位置とを正確に示すデジタル数のセットに結集される。この事象データパケットは、データ取得プロセッサ1730の一部である同時検出器1732に伝えられる。
【0149】
同時検出器1732は、事象ロケータ1727からの事象データパケットを受け取るとともに、それらのうちのいずれかの二つが一致するかを決定する。ペアとして成立しない事象は破棄されるが、一致する事象のペアは、シリアルリンク1733を介して分類装置1734伝えられる一致データパケットとして位置決めされると共に記録される。各一致データパケットは、事象を検出した二つのシンシレータ結晶のアドレスを正確に特定するデジタル数のペアを含む。これらから、一致事象を作成した放射線経路の位置及び角度を決定することができる。
【0150】
分類装置1734は、画像再構成プロセッサ1740の一部を形成する回路である。画像再構成プロセッサ1740は、バックプレーンバス1741の周りに形成される。画像CPU1742はバックプレーンバス1741を制御すると共にプロセッサ1740をローカルエリアネットワークに418にリンクさせる。メモリモジュール1743もまたバックプレーン1741に接続するとともに以下に詳細に述べるように画像を再構成するために用いられるデータを保存する。アレイプロセッサ1745もまたバックプレーン1741に接続すると共にメモリモジュール1743内のデータを用いて画像再構成を実行するために画像CPU1742の指示の下で動作する。結果生じる画像アレイ1746はメモリモジュール1743内に保存されるとともに画像CPU1742によりオペレータワークステーション1715へと出力される。
【0151】
分類装置1734の機能は、一致データパケットを受信して、一致データの効率的な保存のために、それらからメモリアドレスを作成する。同じ方向(θ)を示すとともにスキャナの撮像領域を通る一致事象放射線全てのセットは、完全な投影又は「ビュー」である。投影ビュー内の特定の放射線経路と撮像視野の中心との間の距離(R)により該放射線がビュー内に位置決めされる。図17に示されるように、例えば、事象1760は、投影角θ及び距離Rにおけるビュー内に位置する投影放射線1762に沿って発生する。分類装置1734は、この投影放射線上に横たわる二つのシンチレータ結晶における事象を示す一致データパケットを分類し出すことにより、スキャン中にこの投影放射線(R,θ)上で生じる事象を全てカウントする。放出スキャン中、一致カウントは、各軸方向画像に対して一つ、メモリ1743内に二次元アレイのセットとしてまとめられ、各々が、その次元の一つとして投影角θをそしてその他の次元として距離Rを有する。この測定された一致事象のθxRマップはヒストグラム又はより一般的にはシノグラムアレイ(sinogram array)1748と呼ばれる。
【0152】
一致事象はランダムに起こり、分類装置1734は各位置データパケット内の二つのシンチレータ結晶のアドレスからθとRの値を素早く決定するとともに対応するシノグラムアレイ要素のカウントを増加させる。放出スキャンが完了すると、シノグラムアレイ1748は各放射線に沿って生じた消滅事象の総数を保存する。そのような消滅事象の数は、放出スキャン中に放射線(R,θ)に沿って生じた陽電子電子消滅事象の数を示し、数分の間に数百、数千の事象が典型的に記録される。これらの数は断層撮影画像を再構成するために用いられる。
【0153】
PET画像の画質は、シノグラム1748に蓄積されることを許されたシンチレーション事象の数に大きく依存する。スキャンが長く継続するほど検出されるシンチレーション事象の数は大きくなり、再構成された画像の画質は高くなる。
【0154】
陽電子放出型断層撮影画像再構成
特に図18を参照すると、本発明は、時間分解放出スキャンを実行するためにPETスキャナにより用いられる。放出スキャンは、プロセスブロック1800において、検査中の対象内に放射性核種を注入することにより開始される。診断用撮像に頻繁に用いられる放射性核種は、フッ素−18(18F)、炭素−11(11C)、窒素−13(13N)及び酸素−15(15O)である。これらは、これらをグルコース又は二酸化炭素などの薬物に含ませることにより「調合薬」と呼ばれる放射性トレーサーとして用いられる。調合薬は患者に注入され、グルコース代謝、脂肪酸の代謝及びタンパク質合成としてそのようなプロセスに関与することとなる。
【0155】
PETスキャナの穴部1712に患者が配置され、プロセスブロック1802でシンチレーション事象が検出されてカウントされる。上記したように、シンチレーション事象は、検出され、分類され、そして、投影ビューθ内の各放射線Rについてのカウントとしてシノグラム1748内に保存される。事象はカウントされるとともに、決定ブロック1804で決定されるように比較的短い時間間隔について蓄積される。プロセスブロック1806において、前記時間間隔が終了すると、蓄積されたシンチレーション事象カウントが時間間隔シノグラム1808として保存される。
【0156】
決定ブロック1810においてスキャンの終了が検出されるまで、放出スキャンは継続し、各時間間隔の後に蓄積されたシノグラムカウントが保存される。スキャンの終了は、プリセットされた時間またはプリセットされた時間間隔数でも良い。何れの場合においても、放出スキャン中に複数の時間間隔シノグラム1808が作成され、そして最後のシノグラム1808が放出スキャン全体における合計カウントを保存する。各時間間隔シノグラム1808は、上記したMR及びCT撮像システムを用いて取得された画像データセットに類似している。
【0157】
スキャンの画像再構成フェーズがここで開始され、このフェーズ中、各時間間隔の最後における調合際の摂取を示す画像フレームが再構成される。まず、プロセスブロック1812において、先験的画像Ipが再構成される。これは、放出スキャン中に保存された剤後のシノグラム1808を用いる、従来の逆投影再構成である。これには、放出スキャン全体における蓄積されたシンチレーション事象が含まれ、最高の画質となる。あるいは、前回取得された対象のX線コンピュータ断層画像を先験的画像Ipとして利用することも可能である。このコンピュータ断層撮影画像がPET/CT撮像システムの組み合わせを用いて取得される場合、取得された時間間隔シノグラム1808を伴う先験的画像Ipのレジストレーションは不要と考えられる。しかしながら、コンピュータ断層撮影画像が異なる撮像システムを用いて取得された場合には、画像レジストレーションが必要となる。
【0158】
1814においてループに入り、その中で時間分解画像フレームIが先験的画像Ipを用いて再構成される。寄り詳細には、プロセスブロック1816において所望の画像フレームの見積りがまず選択される、この見積り画像は、従来の逆投影再構成を所望の時間間隔シノグラム1808上で実行して作成されても良く、又あるいは、見積り画像は先験的画像Ipとして選択される。画像フレーム再構成プロセス1818は、続いて、図3、4及び5を参照して上に記載される本発明の方法にしたがって実行される。これは、決定ブロック1820で決定されるように、各時間間隔シノグラム1808に対応する画像フレームが作成されるまで繰り返される。結果として、放出スキャン中、各時間間隔における調合剤の摂取を示す一連の画像フレームが作成される。再構成中により良質の先験的画像を用いることにより、各画像フレームの画質は、小さな消滅事象カウントを有するシノグラムを用いる従来の画像再構成よりも、実質的に向上する。
【0159】
上記の画像再構成ストラテジーと同じものを、単光子放出型コンピュータ断層撮影(SPECT)システムを用いて取得される画像を再構成するために利用することができることは、当業者に容易に理解される。PETスキャナの場合と同様、SPECTは、異なる放射線経路に沿って対象から放出される光子の検出されたカウントを蓄積する。スキャン中、ガンマカメラがゆっくりと動かされて異なるビュー角におけるカウントを蓄積する。本は詰めを用いて、一連の画像フレームが、ガンマカメラをより素早く動かすことにより、同じ一連のビュー角にわたって繰り返し取得される。合計スキャン時間を増加させないように各ビュー角においてより少ないカウントが蓄積されるものの、各ビュー角におけるカウント全てを足し合わせることにより形成されるスパース化画像を用いることにより、各再構成された画像フレームのSNRが維持される。
【0160】
本発明は一以上の好ましい実施形態の形で記載されており、明示的に別段の定めがある場合を除き、多くの同等のもの、代替的なもの、バリエーション、修正が可能でありまた本発明の範囲に含まれることは明らかである。例えば、本発明の方法は、撮像システム内で取得された画像データの時間分解能を高めるために、何れの撮像システムにおいても実施可能である。
【特許請求の範囲】
【請求項1】
撮像システムを用いて対象の画像を再構成する方法において、
a)前記撮像システムを用いて、前記対象の画像データの時系列データを取得するステップと、
b)前記対象の見積り画像を選択するステップと、
c)前記ステップa)で取得された前記画像データの時系列データから、前記対象の先験的画像を再構成するステップと、
d)前記先験的画像と前記見積り画像とを用いて、前記対象のスパース化された画像を作成するステップと、
e)前記スパース化された画像と前記見積り画像と前記取得された画像データの時系列データとを用いて、前記対象の所望の画像を再構成するステップと、
を含むことを特徴とする対象の画像を再構成する方法。
【請求項2】
前記ステップb)〜e)が、所望の画像の時系列画像を作成するために繰り返されることを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項3】
前記画像データの時系列データが第一の時間分解能を用いて取得され、そして、前記所望の画像の時系列画像が前記第一の時間分解能よりも高い第二の時間分解能を示すことを特徴とする請求項2に記載の対象の画像を再構成する方法。
【請求項4】
f)対象の動きを示す信号を取得するステップと、
g)前記取得された画像データの時系列データから、動きフェーズ画像データのセットを作成するステップと、
をさらに含むことを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項5】
前記ステップg)が、
対象の動きを示す前記取得された信号中の時間周期を示すゲーティングウィンドウを選択すること、及び、
前記取得された画像データの時系列データから、前記ゲーティングウィンドウ中に取得された画像データを選択すること、
を含むことを特徴とする請求項4に記載の対象の画像を再構成する方法。
【請求項6】
前記ステップg)が、
前記選択されたゲーティングウィンドウを複数の時間ウィンドウに分割すること、及び、
前記複数の時間ウィンドウを用いて、前記動きフェーズ画像データセットを対応する複数の動きサブフェーズ画像データのセットに分割すること、
をさらに含むことを特徴とする請求項5に記載の対象の画像を再構成する方法。
【請求項7】
前記ステップb)が、前記動きフェーズ画像データのセットから前記見積り画像を再構成することを含むことを特徴とする請求項4に記載の対象の画像を再構成する方法。
【請求項8】
前記対象の動きが前記心臓の物理的な動きであり、前記対象の動きを示す前記信号が心電図(ECG)信号であり、そして、前記動きフェーズ画像データセットが心拍フェーズ画像データのセットであることを特徴とする請求項4に記載の対象の画像を再構成する方法。
【請求項9】
前記ステップd)が、前記見積り画像から前記先験的画像を差し引くことを含むことを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項10】
前記ステップe)が、
e)i)前記スパース化された画像と前記見積り画像と前記取得された画像データの時系列データとを用いて、目的関数を作成すること、及び、
e)ii)前記目的関数を繰り返し最小化することにより、前記所望の画像を再構成すること、
を含むことを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項11】
前記ステップe)i)が、
少なくとも第一の目的関数項と第二の目的関数項とを作成すること、及び、
前記少なくとも第一の目的関数項と第二の目的関数項とを足し合わせること、
を含み、
前記少なくとも第一の目的関数項が、前記スパース化された画像をスパース化変換することにより作成され、かつ、前記少なくとも第二の目的関数項が、前記見積り画像をスパース化変換することにより作成される
ことを特徴とする請求項10に記載の対象の画像を再構成する方法。
【請求項12】
前記ステップe)i)が、
前記少なくとも第一の目的関数項と第二の目的関数項とのノルムを計算すること、及び、
正規化パラメータを用いて前記計算されたノルムの重み付けを行うこと、
をさらに含むことを特徴とする請求項11に記載の対象の画像を再構成する方法。
【請求項13】
前記目的関数が、以下のフォームの内の少なくとも一つを有し、
該フォームは、
【数30】
であることを特徴とする請求項10に記載の対象の画像を再構成する方法。
【請求項14】
前記撮像システムが、磁気共鳴撮像(MRI)システム、X線コンピュータ断層撮影(CT)撮像システム、C−armX線撮像システム、陽電子放出型コンピュータ断層撮影(PET)撮像システム、及び単光子放出型コンピュータ断層撮影(SPECT)撮像システムのうちの一つとされることを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項1】
撮像システムを用いて対象の画像を再構成する方法において、
a)前記撮像システムを用いて、前記対象の画像データの時系列データを取得するステップと、
b)前記対象の見積り画像を選択するステップと、
c)前記ステップa)で取得された前記画像データの時系列データから、前記対象の先験的画像を再構成するステップと、
d)前記先験的画像と前記見積り画像とを用いて、前記対象のスパース化された画像を作成するステップと、
e)前記スパース化された画像と前記見積り画像と前記取得された画像データの時系列データとを用いて、前記対象の所望の画像を再構成するステップと、
を含むことを特徴とする対象の画像を再構成する方法。
【請求項2】
前記ステップb)〜e)が、所望の画像の時系列画像を作成するために繰り返されることを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項3】
前記画像データの時系列データが第一の時間分解能を用いて取得され、そして、前記所望の画像の時系列画像が前記第一の時間分解能よりも高い第二の時間分解能を示すことを特徴とする請求項2に記載の対象の画像を再構成する方法。
【請求項4】
f)対象の動きを示す信号を取得するステップと、
g)前記取得された画像データの時系列データから、動きフェーズ画像データのセットを作成するステップと、
をさらに含むことを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項5】
前記ステップg)が、
対象の動きを示す前記取得された信号中の時間周期を示すゲーティングウィンドウを選択すること、及び、
前記取得された画像データの時系列データから、前記ゲーティングウィンドウ中に取得された画像データを選択すること、
を含むことを特徴とする請求項4に記載の対象の画像を再構成する方法。
【請求項6】
前記ステップg)が、
前記選択されたゲーティングウィンドウを複数の時間ウィンドウに分割すること、及び、
前記複数の時間ウィンドウを用いて、前記動きフェーズ画像データセットを対応する複数の動きサブフェーズ画像データのセットに分割すること、
をさらに含むことを特徴とする請求項5に記載の対象の画像を再構成する方法。
【請求項7】
前記ステップb)が、前記動きフェーズ画像データのセットから前記見積り画像を再構成することを含むことを特徴とする請求項4に記載の対象の画像を再構成する方法。
【請求項8】
前記対象の動きが前記心臓の物理的な動きであり、前記対象の動きを示す前記信号が心電図(ECG)信号であり、そして、前記動きフェーズ画像データセットが心拍フェーズ画像データのセットであることを特徴とする請求項4に記載の対象の画像を再構成する方法。
【請求項9】
前記ステップd)が、前記見積り画像から前記先験的画像を差し引くことを含むことを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項10】
前記ステップe)が、
e)i)前記スパース化された画像と前記見積り画像と前記取得された画像データの時系列データとを用いて、目的関数を作成すること、及び、
e)ii)前記目的関数を繰り返し最小化することにより、前記所望の画像を再構成すること、
を含むことを特徴とする請求項1に記載の対象の画像を再構成する方法。
【請求項11】
前記ステップe)i)が、
少なくとも第一の目的関数項と第二の目的関数項とを作成すること、及び、
前記少なくとも第一の目的関数項と第二の目的関数項とを足し合わせること、
を含み、
前記少なくとも第一の目的関数項が、前記スパース化された画像をスパース化変換することにより作成され、かつ、前記少なくとも第二の目的関数項が、前記見積り画像をスパース化変換することにより作成される
ことを特徴とする請求項10に記載の対象の画像を再構成する方法。
【請求項12】
前記ステップe)i)が、
前記少なくとも第一の目的関数項と第二の目的関数項とのノルムを計算すること、及び、
正規化パラメータを用いて前記計算されたノルムの重み付けを行うこと、
をさらに含むことを特徴とする請求項11に記載の対象の画像を再構成する方法。
【請求項13】
前記目的関数が、以下のフォームの内の少なくとも一つを有し、
該フォームは、
【数30】
であることを特徴とする請求項10に記載の対象の画像を再構成する方法。
【請求項14】
前記撮像システムが、磁気共鳴撮像(MRI)システム、X線コンピュータ断層撮影(CT)撮像システム、C−armX線撮像システム、陽電子放出型コンピュータ断層撮影(PET)撮像システム、及び単光子放出型コンピュータ断層撮影(SPECT)撮像システムのうちの一つとされることを特徴とする請求項1に記載の対象の画像を再構成する方法。
【図1】

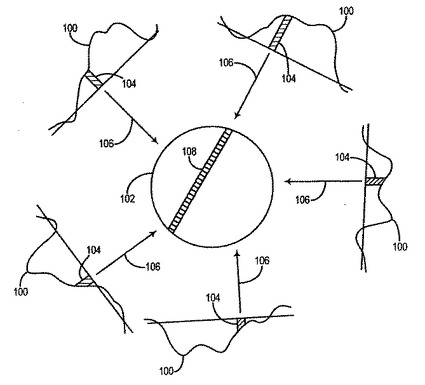
【図2】
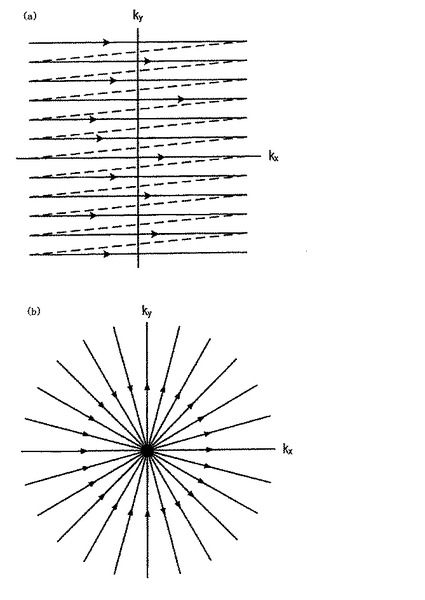
【図3】
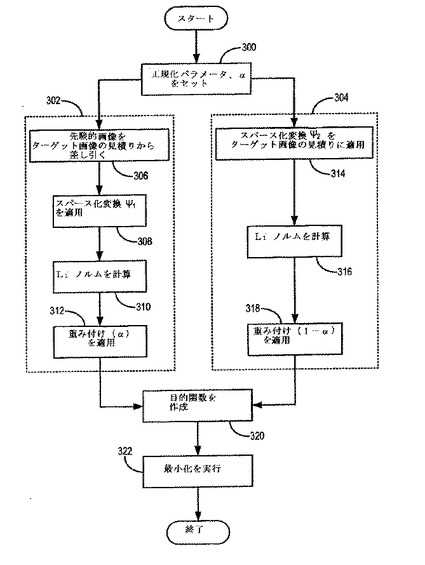
【図4】
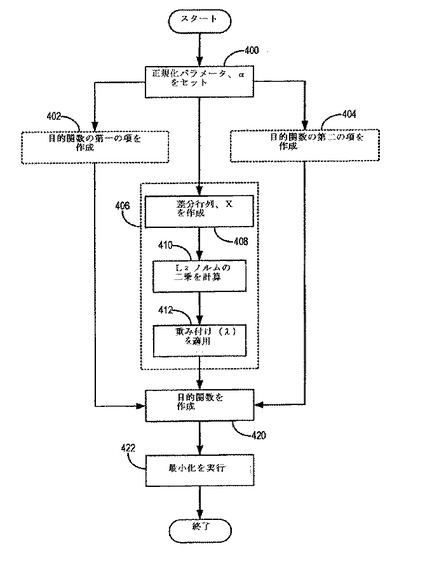
【図5】
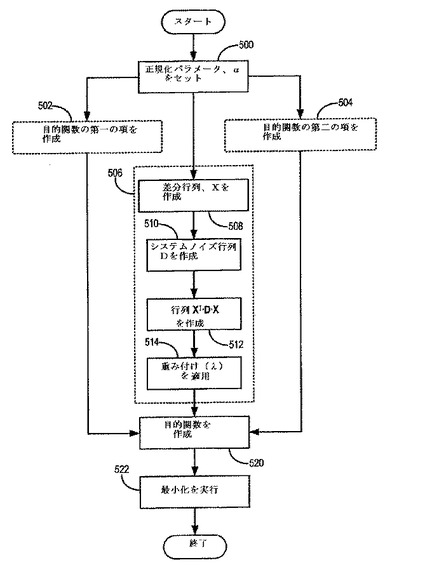
【図6】
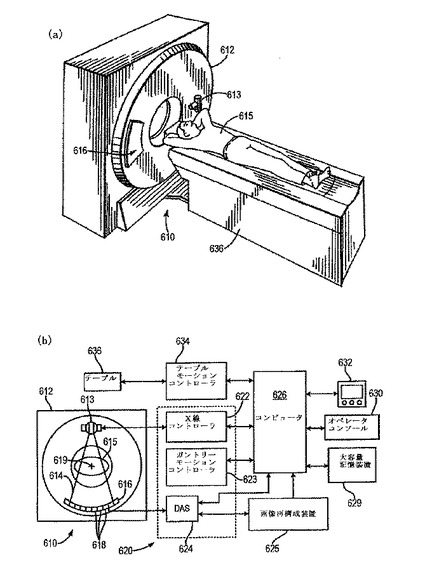
【図7】
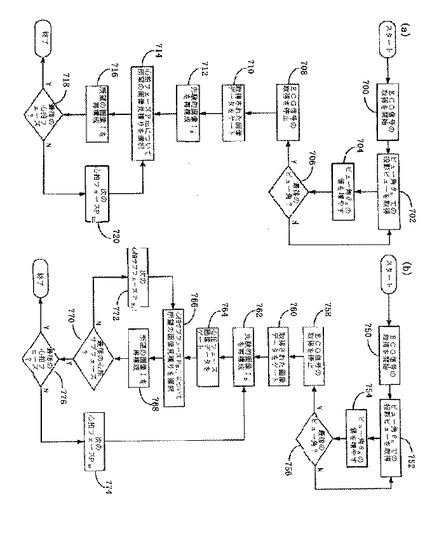
【図8】
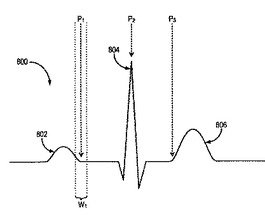
【図9】
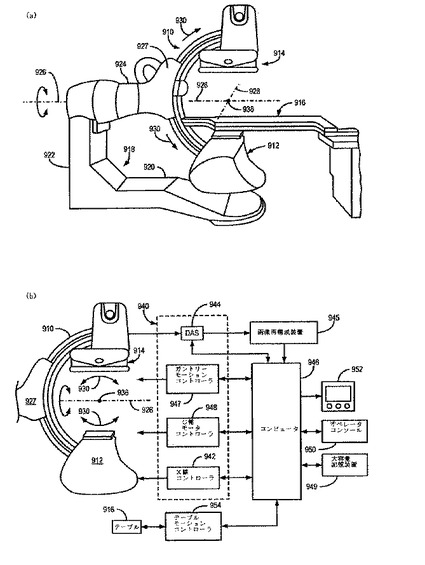
【図10】
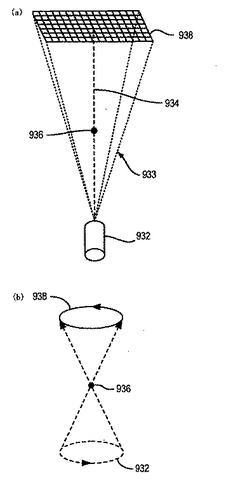
【図11】
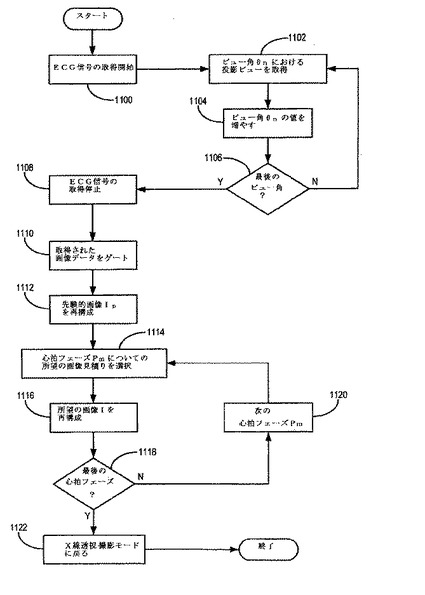
【図12】
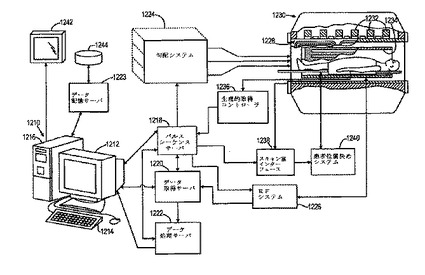
【図13】
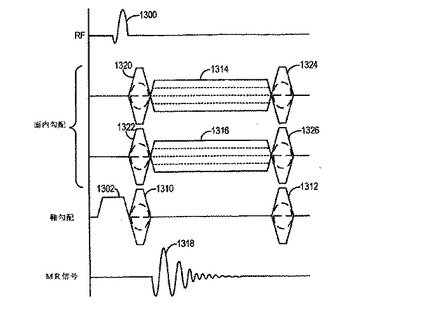
【図14】
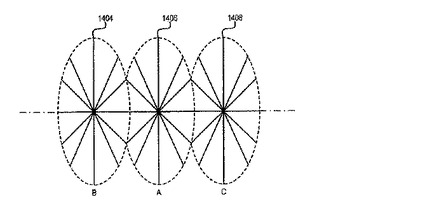
【図15】
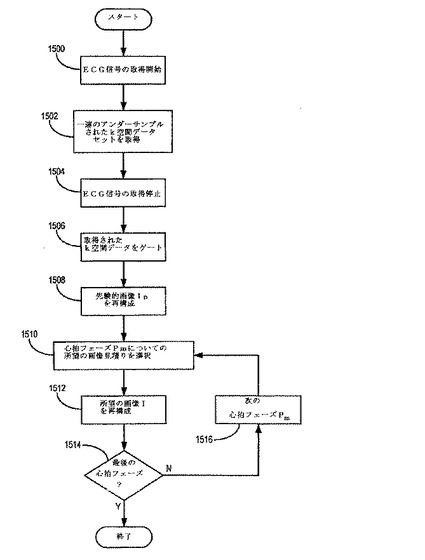
【図16】
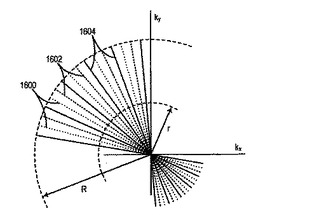
【図17】
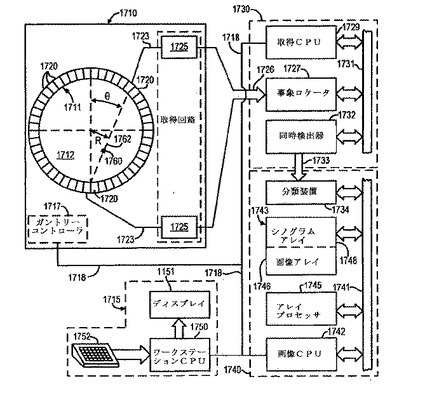
【図18】
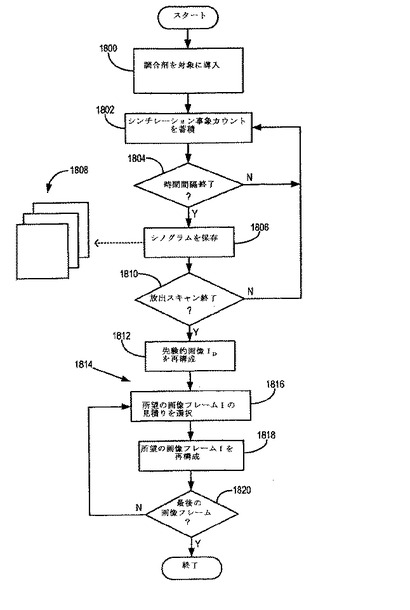
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公表番号】特表2011−511654(P2011−511654A)
【公表日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願番号】特願2010−539415(P2010−539415)
【出願日】平成20年10月17日(2008.10.17)
【国際出願番号】PCT/US2008/011850
【国際公開番号】WO2009/082419
【国際公開日】平成21年7月2日(2009.7.2)
【出願人】(390023641)ウイスコンシン アラムナイ リサーチ ファウンデーシヨン (61)
【氏名又は名称原語表記】WISCONSIN ALUMNI RESEARCH FOUNDATION
【Fターム(参考)】
【公表日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願日】平成20年10月17日(2008.10.17)
【国際出願番号】PCT/US2008/011850
【国際公開番号】WO2009/082419
【国際公開日】平成21年7月2日(2009.7.2)
【出願人】(390023641)ウイスコンシン アラムナイ リサーチ ファウンデーシヨン (61)
【氏名又は名称原語表記】WISCONSIN ALUMNI RESEARCH FOUNDATION
【Fターム(参考)】
[ Back to top ]