
ダイバー用ナビゲーション支援
ダイバー・ユニットは特定の目標物への距離と方向とを算出する。目標物が障害に遮られている場合、ダイバー・ユニットは別のダイバー・ユニットからナビゲーション支援データを受け取る。ナビゲーション支援データは両ダイバー・ユニットを結んだ共通の基準に対する方向の情報を含む。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は一般に水中でのナビゲーション支援に関し、さらに詳しくは、障害に遮られた目標物への方向と距離とを算出する方法と装置に関する。
【背景技術】
【0002】
レクリエーションのダイビングは人気のあるスポーツであり、急速に成長している。レクリエーションのダイバーがしばしば遭遇する問題に、水中でのナビゲーションがある。ダイバーはしばしば、停泊したダイブ・ボートや水中のアトラクション(例えばさんご礁や沈没船)のような特定の場所にどうにかしてたどり着く必要がある。さらに、水中のダイバーがダイビング仲間の場所を探す必要があることもある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
視覚によるナビゲーションが常に役に立つとは限らない。例えばダイバーが、視界の悪い水域にいるかもしれないし、関心対象の人や物からとても遠い位置にいるかもしれない。さらに、ダイバーと所望の目標物との間に障害物があるかもしれない。これらのような状況では、ダイバーは方向を知るために浮上する必要があるかもしれない。浮上には減圧が必要となるため不便かもしれない。
【課題を解決するための手段】
【0004】
本発明は浮上を必要としない水中でのナビゲーションを容易にするダイバー用ナビゲーション支援を提供する。ナビゲーション支援(以下、ダイバー・ユニットとも言う)はダイバーの腕に装着されてもよい。ダイバー・ユニットはソナー周波数を通じてボート・ユニット、ビーコン・ユニット、又はその他のダイバー・ユニットと通信する。ボート・ユニット、ビーコン・ユニット、又はその他のダイバー・ユニットは同じ周波数と時分割多元接続方式とを使用して通信する。目標物への距離と方向とを獲得するために、さまざまな技術が使用され得る。目標物はダイブ・ボートかもしれないし、水中アトラクションに位置するビーコンかもしれないし、仲間のダイバーかもしれない。
【0005】
発明の一つの態様では、2個のダイバー・ユニット間で方向情報を通信するためのプロトコルが確立される。2個のダイバー・ユニット間で方向情報を通信できるため、第1のダイバー・ユニットは第2のダイバー・ユニットに対してナビゲーション支援を提供することが可能となる。現在のところ、角度の測定における共通の基準が欠けているため、1個のダイバー・ユニットからもう1個のダイバー・ユニットへ方向情報を伝達する有効な方法は存在しない。本発明によれば、目標物に対して視界か障害に遮られていない第1のダイバー・ユニットは、第2のダイバー・ユニットの目標物への距離と方向とを算出することができ、その距離と方向との情報を第2のダイバー・ユニットに伝達することができる。第1のダイバー・ユニットから第2のダイバー・ユニットに伝達される方向情報は、第1のダイバー・ユニットと第2のダイバー・ユニットとの両方にすでに知られているか決定することができる、共通の基準線に関連する。ある実施態様では、1個のダイバー・ユニットから別のダイバー・ユニットに伝達される方向情報は、第1のダイバー・ユニットの現在地点と第2のダイバー・ユニットの現在地点とを結んだ直線を基準とする。両ダイバー・ユニットは自己の内部の角度基準に対する共通の基準線の方向を測定できるため、受信ダイバー・ユニットは受信した方向情報を自己の内部の基準に合わせて変換することができる。
【発明を実施するための最良の形態】
【0006】
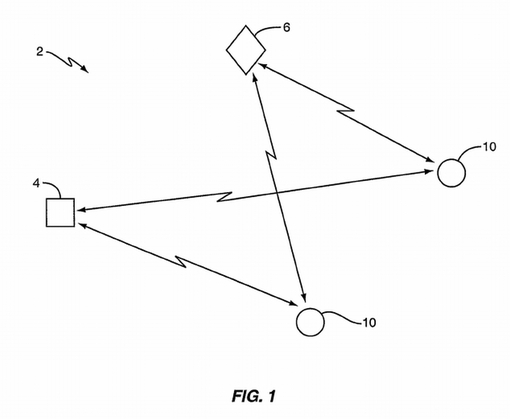
添付の図を参照すると、図1は、ボート・ユニット4、1個以上のビーコン・ユニット6、多数のダイバー・ユニット10を備える通信システム2を説明したものである。ボート・ユニット4は通常、「マスター・ユニット」として機能し、通信システム2内の様々なエンティティ間の通信を制御する。ビーコン・ユニット6は主に指標として使用され、後述のとおりダイバー・ユニット10へナビゲーション支援を提供できる。ビーコン・ユニット6は水面に位置していてもよいし、水中に位置していてもよい。ボート・ユニット4が存在しない場合には、ビーコン・ユニット6はマスター・ユニットとして機能することもできる。ビーコン・ユニット6が2個以上ある場合には、最も大きい(または、最も小さい)アドレスのビーコン・ユニット6をマスター・ユニットとして動作させるために選択してもよい。ダイバー・ユニット10はダイバーに装着され又は持ち運ばれ、水中での通信とナビゲーションとに使用される。ボート・ユニット4もビーコン・ユニット6も存在しない場合、ダイバー・ユニット10はマスター・ユニットとして機能することができる。ダイバー・ユニット10が2以上ある場合には、最も大きい(または、最も小さい)アドレスのダイバー・ユニット10をマスター・ユニットとして動作させるために選択してもよい。
【0007】
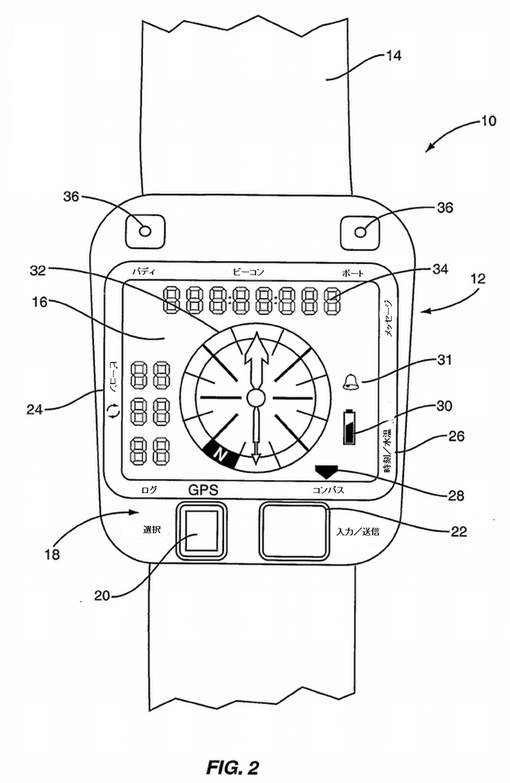
図2は好適なダイバー・ユニット10の一例を説明したものである。ダイバー・ユニット10は、リストバンド14に搭載された防水筐体12を備える。ダイバー・ユニット10は、液晶ディスプレイのような電子ディスプレイ16、一つ以上の入力装置18を含む。図1に示される好適な実施形態では、スクロールホイール20と入力/送信ボタン22とを含む。当業者であれば、ジョイスティック・コントローラーやキーボード、タッチパッドのようなその他の入力装置が、ユーザ入力のために使用可能であることを認識するであろう。さらに、ディスプレイ16はユーザ入力を受けるためにタッチスクリーン・ディスプレイを備えてもよい。
【0008】
ディスプレイ16の外縁24は、「バディ」や「ビーコン」など、ダイバー・ユニット10の様々な機能を表示する一連のラベル26を含む。機能表示器28は現在選択中の機能を指す。図2において、機能表示器28はコンパス機能が選択されていることを表す。さらに、ディスプレイ16は、状態情報をユーザに提供するために、電力表示器30、アラーム表示器31のような、その他の状態表示器を表示してもよい。スクロールホイール20を回転することや入力/送信ボタン22を押すことで機能表示器28を動かして機能を選択することができる。
【0009】
スクロールホイール20の回転の作用は、状況に依存してもよい。例えば、スクロールホイール20を回転して所望の機能に指針28を移動することができる。それから、入力/送信ボタン22を押すことで機能を選択してもよい。ひとたび機能が選択されたなら、選択した機能に関連するメニューやオプション全体をスクロールするのにスクロールホイール20の回転を使用することができる。例えば、ユーザが「バディ」を選択したとすると、スクロールホイール20はバディの一覧全体をスクロールして、一人のバディを選択するために使用してもよい。
【0010】
状態表示器に加えて、ディスプレイ16はダイバーの鑑賞のための有益な情報を出力するために使用される。好適な実施態様では、ディスプレイ16は方向指示器32を表示することができる。詳細は後述するが、方向指示器32は水中でナビゲーションするために目標物への方向を表すことができる。ディスプレイ16はさらに、ダイバーに数値データ及び英数字データを表示するために、数字表示領域又は英数字表示領域を含んでもよい。表示される数値データの例は、現在の水深、特定の目標物への距離、現在の時刻、現在の緯度経度を含む。これらの例は表示され得るすべての情報の包括的な一覧を意図したものではなく、表示されてよい情報の種類を単に説明したものである。
【0011】
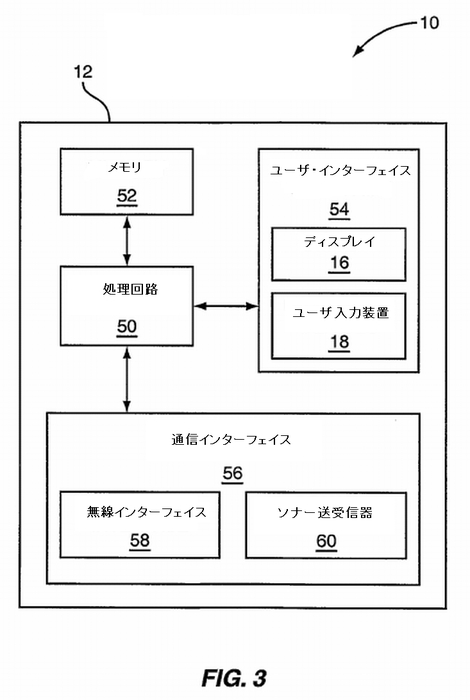
図3はダイバー・ユニット10の主な構成要素を説明した機能ブロック図である。主な構成要素として、ダイバー・ユニット10のデータ処理と動作制御とのための処理回路50、処理回路50によって使用される符号とデータとを蓄えるメモリ52、ディスプレイ16とユーザ入力装置18とを含むユーザ・インターフェイス54、通信インターフェイス56を備える。処理回路50は一つ以上のプログラム可能なプロセッサを備えてもよく、それらは汎用マイクロプロセッサやマイクロコントローラ、デジタル信号プロセッサ、又はこれらの組合せでもよい。メモリ52はダイバー・ユニット10のメモリの全階層を代表し、分散したメモリ装置を備えてもよいし、一つ以上のマイクロプロセッサの内部メモリを備えてもよい。通信インターフェイス56は、水上で使用する無線インターフェイス58と水中通信のためのソナー送受信器60を備える。無線インターフェイスは例えば標準化されたBluetooth、802.11b、802.11gインターフェイスを備えてもよい。
【0012】
ボート・ユニット4とビーコン・ユニット6とは図3で示されるのと同じ機能の構成要素を備えてもよい。しかし、ボート・ユニット4は異なるユーザ・インターフェイス54を備えてもよい。ビーコン・ユニット6からはユーザ・インターフェイス54を削除することができる。
【0013】
別の実施態様では、ダイバー・ユニット10は、ダイバーがいつ潜水したかを検知するために接触点(contact)36を含んでもよい。ダイバーが潜水するとき、少しの量の水流が接触点36の間を流れ、それがダイバーの着水を表す。それに応じて、処理回路50は無線送受信器58を無効にして、ソナー送受信器60を有効にしてもよい。
【0014】
ダイバー・ユニット10はダイバーに水中での通信とナビゲーション機能とを提供する。水中での通信は約5kHzから約200kHzの範囲のソナー周波数で発生する。採用され得る水中での通信のための比較的単純で強固な通信システムを以下に記述する。しかし、当業者は、どの既知の通信システムであっても以下に記述するシステムと置換可能であることが分かるだろう。
【0015】
ある好適な実施態様では、すべての水中の装置は時分割多元接続方式(TDMA)を使用して同じ周波数で通信するが、符号分割多重接続方式を採用してもよい。TDMAは通信帯域を送信データ及び受信データとの内、少なくともいずれかに使用される連続した時間スロットに分割する。装置は自分に割り当てられた時間スロットでだけ送信及び受信との内、少なくともいずれかを行う。非繰り返し(non−repeating)時間スロットの集合はフレームを構成する。標準化されたTDMAシステムでは、フレームは固定長を持ち、フレーム・タイミングはすべてのユニットに既知である。本発明では、フレームはダイバー・ユニット10間の伝播遅延に対応した可変長フレームであり、所定のフレーム・タイミングは有さないとする。
【0016】
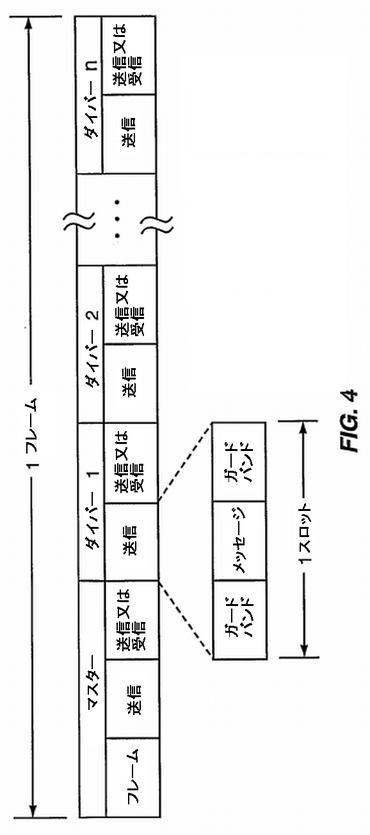
図4は、マスター・ユニットの役割をする1個のボート・ユニット4とn個のダイバー・ユニット10とに対応するTDMAフレームのフレーム構造を説明したものである。図4に示されるn人のダイバーのシナリオの例では、各ダイバー・ユニット10は2個の時間スロットを割り当てられる。従って、20ミリ秒の各区間ごとにフレームは2n+m個のスロットを含む。ここで、nはダイバーの数であり、mはボート・ユニット4に割り当てられたスロット数である。図4に示される実施態様では、フレーム内の先頭の3個の時間スロットがボート・ユニット4に割り当てられ、このボート・ユニット4がマスター・ユニットとして機能する。各ダイバー・ユニット10には連続した2個の時間スロットが割り当てられる。しかし、ダイバー・ユニット10に連続した時間スロットが割り当てられる必要はない。ボート・ユニット4や他のマスター・ユニットは8個のアドレスまで持ってもよく、各アドレスに時間スロットを割り当ててもよい。当業者は1個以上のボート・ユニットが存在し得ることを正しく理解できるだろう。この場合、ボート・ユニットの一つがマスター・ユニットとして機能するために選択される。さらに、図4には図示されていないが、ビーコン・ユニット6が存在してもよいし、このビーコン・ユニット6に後述するのと同様に時間スロットを割り当ててもよい。
【0017】
各ダイバー・ユニット10は割り当てられた時間スロットの使用を制御する。ダイバー・ユニット10は第1の時間スロットで送信してもよいし、第2の時間スロットを送信又は受信に使用してもよい。例えば、第1のダイバー・ユニット10は自己の第1の時間スロットで第2のダイバー・ユニット10にメッセージを送信して、第2のダイバー・ユニット10が第1のダイバー・ユニット10に、第1のダイバー・ユニット10の第2の時間スロットを使って応答を送信してもよい。従って、送信と受信とのための連続した時間スロットの使用は、別のユニットとメッセージを交換する便利な方法を提供する。
【0018】
図4はまた、スロットの書式を説明する。各時間スロット内に、時間スロットの先頭と末尾とにガードバンドがある。各時間スロットの残りの時間はメッセージ・データの送信に使用される。発明のある実施態様では、各時間スロットは一つのメッセージの送信又は受信に使用される。しかし、当業者はメッセージの継続期間がスロットの幅と比較して短いときは、一つの時間スロットで複数のメッセージを送信できるだろうことを正当に理解できるだろう。反対に、メッセージ長がスロットの幅よりも長い場合には、メッセージは分割され、複数のスロットで送信できるだろう。
【0019】
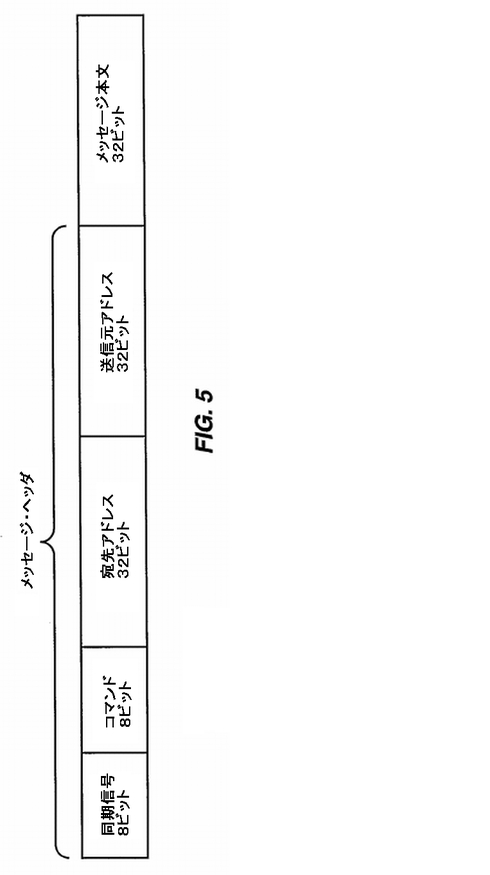
図5に好適なメッセージの書式の一例が示される。メッセージは、メッセージ・ヘッダとメッセージ本文を含む。好適な実施態様では、メッセージ・ヘッダは同期信号(8ビット)、コマンド(8ビット)、宛先アドレス(32ビット)、及び送信元アドレス(32ビット)を含む。同期信号はメッセージの開始を表すのに使用される既知のビットパターンである。コマンド要素は受信ユニットにメッセージの種類を示す。メッセージが複数の時間スロットにわたる場合には、現在のスロットのメッセージデータが直前のスロットで送信されたメッセージに連続するかを表すためにコマンド要素を使用できるだろう。宛先アドレス要素は所望のメッセージの受信者を表す。送信元アドレス要素はメッセージの送信者を表す。各ユニットは、メッセージの宛名となるアドレスとして使用される固有のユニットIDを有する。例えば、送信元アドレス欄にダイバー・ユニットA用のユニットIDを設定し、宛先アドレス欄にダイバー・ユニットB用のユニットIDを設定することで、ユニットAからユニットBへのメッセージの宛先を指定できる。ユニットIDとアドレスとの両用語は、以下では同義語として使用される。
【0020】
補遺Aの表は、水中での通信システム2で使用され得る好適なメッセージの一覧の一例を含む。これらのメッセージを以下に簡潔に記述する。用法とメッセージ構文とに関するさらなる詳細は補遺にて与えられる。
【0021】
メッセージは大まかに五つのカテゴリーに分類できる。これらの五つのカテゴリーは、クロック同期化メッセージ、距離・方向メッセージ、通信メッセージ、初期化メッセージ、雑メッセージを含む。クロック同期化メッセージは異なるユニット間のクロックを同期するために使用される。距離・方向メッセージは2個のユニット間の距離と方向とを測定するために使用される。通信メッセージはメッセージの送信に使用される。初期化メッセージは通信の確立に使用される。雑メッセージはその他の機能に使用される。
【0022】
クロック同期化メッセージは、クロック同期メッセージ、クロック同期要求メッセージ、クロック同期応答メッセージ、クロック同期検証メッセージを含む。クロック同期要求メッセージは、2個のユニット間のクロックの同期を要求するために、要求ユニットから応答ユニットに対して送信される。クロック同期要求はオプションとして、周辺の水温と現在の水深とを含めてもよい。これが可能ならば、距離と時間との算出の精度が向上する。
【0023】
クロック同期メッセージは、クロック同期要求メッセージの応答として送信される。クロック同期メッセージは送信ユニットの現在のクロックを含む。送信ユニットのクロックは初期化手続きにおいて、マスター・クロックとして使用される。受信ユニットは、クロック同期メッセージから得た現在のクロックと、送信ユニットからの距離とを使用して、自己のクロックを更新することができる。受信ユニットが送信ユニットへの距離を知らない場合は、送信ユニットは、クロック同期メッセージの直前に、後述するピング応答メッセージを送信してもよい。その結果、受信ユニットは送信ユニットへの距離を算出できる。クロック同期応答メッセージはクロック同期メッセージの応答として送信される。クロック同期応答メッセージには、クロック同期応答メッセージを受信する時点の受信ユニットのクロックの予想値を含めることができる。受信ユニットは、予想時刻とクロック同期応答メッセージを受信した時点の受信ユニットのクロックとを比較する。その時間が所定の許容誤差内であれば、クロックは同期している。同期していない場合は、受信ユニットはさらにクロック同期メッセージを送信してもよい。クロック同期検証メッセージはあるユニットから別のユニットに、それらのクロックが同期していることを検証するため送信される。
【0024】
距離・方向メッセージは、ピング・メッセージ、ピング応答メッセージ、ロケーション支援要求メッセージ、ロケーション支援応答メッセージ、確認メッセージ、及び確認応答メッセージを含む。ピング・メッセージとピング応答メッセージとは、2個のユニット間の距離と方向とを測定するために使用される。ピング応答メッセージは前述のとおり、クロック同期要求の応答としても送信することができる。第1のユニットは第2のユニットにピング・メッセージを送信する。ピング・メッセージは、ピング・メッセージが送信されたときの送信ユニットの現在クロックを表すクロック値を含む。第2のユニットは応答としてピング応答メッセージを送信する。ピング応答メッセージは、処理遅延を算出するために、ピング・メッセージの受信とピング応答メッセージの送信との間の経過時間を表すクロック値を含む。その結果、第1のユニットは、到達時刻方法又は伝播時間方法を使用して、2個のユニット間の距離を算出できる。
【0025】
ロケーション支援要求メッセージは、ナビゲーション支援の要求に使用される。ロケーション支援要求メッセージは、典型的に、1個のダイバー・ユニットからビーコン・ユニット6か別のダイバー・ユニット10に送信されるが、ボート・ユニット4やその他のマスター・ユニットに送信されてもよい。ロケーション支援要求メッセージは、メッセージ本文に、要求ユニットが場所を知りたい目標物のユニットIDを指定する。ロケーション支援応答メッセージは、ロケーション支援メッセージの応答として送信される。ロケーション支援応答メッセージは、ロケーション支援要求メッセージを送信したユニットからの、ロケーション支援要求メッセージで指定された目標物への距離と方向を含む。ロケーション支援応答メッセージはオプションとしてターゲットの水深を含んでもよい。
【0026】
確認メッセージと確認応答メッセージとは距離と方向との測定の検証に使用される。確認メッセージは、送信ユニットの水深と、その指定した目標物への距離及び方向とを含む。そして、応答ユニットは、第1のユニットから受信した値を比較することで、第1のユニットにとっての指定したターゲットへの距離と方向とを算出することができる。確認応答メッセージは、距離と方向との測定の検証が完了したかどうかを表す。
【0027】
通信メッセージはポイント・ツー・ポイント・メッセージ、ポイント・ツー・マルチポイント・メッセージ、通信リレー要求メッセージ、及び再送要求メッセージを含む。ポイント・ツー・ポイント・メッセージは、あるユニットから別のユニットにメッセージを送信するのに使用される。所望の受信者はメッセージの宛先アドレスのよって指定される。ポイント・ツー・マルチポイント・メッセージはメッセージをユーザのグループへマルチキャストするのに使用される。ポイント・ツー・マルチポイント・メッセージは、メッセージの宛先アドレス欄にグループIDを設定することによって表される。所定のグループIDはすべてのユニットを含むマスター・グループを表すのに使用してもよい。緊急メッセージは緊急な状況を表すために使用される。通信リレー要求メッセージは、第1のユニットから第2のユニットに対して、特定の目標ユニットへの一つ以上のメッセージを第2のユニットに中継するように要求するために送信される。これは、所望の受信者が障害に遮られているときに有効である。このメッセージは、メッセージの中継を中止するためにも送信される。
【0028】
初期化メッセージは、初期化フレーム・メッセージ、ユニット順列メッセージ、及びユニット順列肯定応答メッセージを含む。初期化フレーム・メッセージは初期化手続きの開始に使用される。初期化手続きは送信順列を確立するための手続きである。初期化フレーム・メッセージは、ボート・ユニット4又はその他のマスター・ユニットから、自身以外のすべてのユニットに対して送信される。ユニット順列メッセージは、特定のダイバー・ユニット10に送信順列での自身の位置を表すために、ボート・ユニット4又は他のマスター・ユニットからその特定のダイバー・ユニット10に送信される。送信順列での位置は、ユニット順列メッセージの本文に、直前のダイバー・ユニット10のユニットIDを含めることで表す。例えば、ダイバーBに送信されるユニット順列メッセージは、そのメッセージ本文にダイバーA用ユニットIDを含めてもよい。その結果、ダイバー・ユニットBは、ダイバー・ユニットAの後に送信することがわかる。ユニット順列肯定応答メッセージは、ユニット順列メッセージの受信を確認するために、ダイバー・ユニット10からボート・ユニット4又は他のマスター・ユニットに送信される。
【0029】
雑メッセージは、ウェイポイント・メッセージ、フレーム・メッセージ、支援調査メッセージ、及び調査応答メッセージを含む。ウェイポイント・メッセージは、ビーコン・ユニットを始動又は停止するため、ダイバー・ユニット10からビーコン・ユニット6に送信される。ウェイポイント・メッセージは、31ビットの認証符号と、ビーコン・ユニット6を始動又は停止するための1ビットのコマンドとを含む。フレーム・メッセージは、フレームの開始を表すために、ボート・ユニット4又はその他のマスター・ユニットからダイバー・ユニット10に送信されるブロードキャスト・メッセージである。フレーム・メッセージはフレーム・メッセージが送信されたときの現在時刻を含む。ダイバー・ユニット10がマスター・ユニットとクロックの同期がされているなら、フレーム・メッセージはマスター・ユニットまでの距離を測定し、クロックを同期するために使用できる。支援調査メッセージは、ナビゲーション支援と通信支援とを要求するために、ダイバー・ユニット10から送信される。支援調査メッセージは、要求された支援の種類を表す種類パラメータを含み、オプションとして特定の種類のユニット(例えば、ボート・ユニット、ビーコン・ユニット、ダイバー・ユニットなど)だけを調査するために、ユニット種類のマスクを含んでもよい。調査応答メッセージは、要求の受諾又は拒絶を表すために、支援調査メッセージの応答として送信される。
【0030】
図4に示すn人のダイバーの例を参照すると、マスター・ユニットとして機能するボート・ユニット4とn個のダイバー・ユニットとが、所定の順列で送信する。通信を開始する前に、マスター・ユニット(例えばボート・ユニット4)は送信順序を規定して、他のすべてのユニット(例えば、ダイバー・ユニット10、存在する場合にはその他のボート・ユニット4やビーコン・ユニット6)にその送信順序の中でのそれらの順番を通知する。初期化手続きの間、ボート・ユニット4又はその他のマスター・ユニットは、各ダイバー・ユニット10又は存在するその他のユニットに、ユニット順列メッセージを送信する。このメッセージは、転送順列における自己の直前のダイバー・ユニット10又はその他のユニットを特定する。ダイバー・ユニット1の場合、直前のダイバー・ユニット10は、ボート・ユニット4となる。各ダイバー・ユニット10がユニット順列メッセージの受信を確認した場合、初期化手続きは完了する。通常の操作の間、各ダイバー・ユニット10は直前のダイバー・ユニット10を起点とする送信を探知する。これは、特定のユニットのスロット1を使用して送信されたメッセージのヘッダに含まれる送信元アドレスと、スロット2を使用して送信されたメッセージの送信元アドレス又は宛先アドレスとによって決定できる。直前のダイバー・ユニット10又は他のユニットが転送を終了したとの検知した後、後続のダイバー・ユニット10又はその他のユニットは、所定の時間を待ってから送信を行う。所定の時間の長さは衝突を防ぐための長さが選択される。従って、フレーム長はダイバー・ユニット10の個数とダイバー・ユニット10間の伝送遅延とに依存するだろう。
【0031】
送信順序が連続する2個のダイバー・ユニット10の間に障害物がある場合に問題が生じるかもしれない。この状況では、第2のダイバー・ユニット10は、第1のダイバー・ユニット10からの通信を聞き取ることができないかもしれない。一つの結末では、第2のダイバー・ユニット10が送信しないため、通信は行き詰るだろう。この状況では、ボート・ユニット4は、所定の時間の範囲内に何の信号も検知しない場合には、新たなフレーム・メッセージを送信することによって、送信順列を再開してもよい。通信が引き続き行き詰った場合、ボート・ユニット4は送信順序を変更するために初期化手続きを行使することができる。送信順序を変更してもこの問題が解決しない場合は、通信を行き詰らせているダイバー・ユニット10は送信順列から外され得る。
【0032】
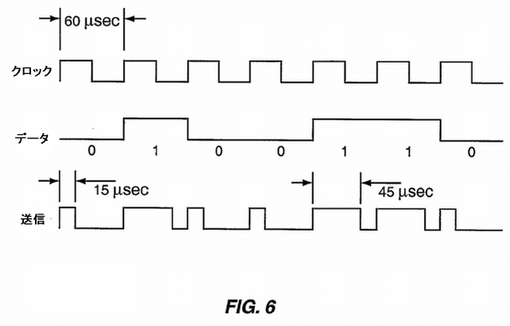
好適な実施態様では、搬送周波数は200キロヘルツで、ビット間隔は0.06ミリ秒(60マイクロ秒)であり、これは約16.67キロbpsのデータ転送速度に等しい。一つのメッセージは合計112ビットを備える。従って、一つのメッセージを送信するのに6.72ミリ秒かかる。
【0033】
図6はどのようにデータを搬送周波数に変調するかを説明したものである。図6でクロック信号、データ信号、及び変調信号を説明する。クロック信号は60マイクロ秒周期であり、これはビット周期に等しい。データ信号は送信される2値データを表す。変調信号は、クロック信号と同じ周波数のパルス列を備える。変調信号で既定のパルスのパルス幅は、データ信号の状態によって決定される。データ信号がローの場合、比較的短いパルスが「0」ビットを表すために生成される。逆に、データ信号がハイの場合、比較的長いパルスが「1」ビットを表すために生成される。好適な実施態様では、0ビットを表す短いパルスは15マイクロ秒の期間で、1ビットを表す長いパルスは45マイクロ秒である。オン/オフ・キーイングは搬送波を変調するのに使用される。搬送波は、変調信号がハイの場合にオンになり、変調信号がローの場合にオフになる。受信機は、信号を検知するために、パルスの立ち上がりを検知してから37マイクロ秒後に信号をサンプリングする。別の実施態様では、送信機のクロック速度の変化を補正するために、立ち上がりの検知の後に様々なサンプリング時間が使用されてもよい。さらに詳しくは、受信ユニットは、送信機のクロック周期を決定してそれに応じてサンプリング時間を調整するために、パルスの立ち上がりの時間間隔を測定してもよい。同期信号が送信されたときにクロック周期の測定を実施してもよい。好適な実施態様では、サンプリング時間Tsは送信クロック周期に0.625を乗じることで決定される。
【0034】
前述したとおり、ダイバー・ユニット10はナビゲーション支援を提供する。特に、ダイバー・ユニット10は方向表示器32を通じて特定の目標物への距離と方向とを表示できる。特定の目標物は、ダイブ・ボート、ビーコン(水面ビーコンや水中ビーコンかもしれない)、他のダイバー(以下、バディ)を含んでもよい。目標物を選択するためのスクロールホイール20とボタン22とを使用して表示器28を動かすことによって、所望の目標物を選択できる。例えば、ユーザは、スクロールを回転することで表示器28を「バディ」に動かして、入力ボタン22を押してもよい。バディがメモリに記憶されている場合、バディの名前がディスプレイに表示されるだろう。複数のバディがメモリに記憶されている場合には、ユーザはスクロールホイール20を回転することでバディの一覧をスクロールすることができる。所望のバディの名前がディスプレイに表示されたときに、入力ボタン22を押すことでバディが選択される。同じ方法をボートやビーコンの選択に使用できる。
【0035】
ひとたび特定の目標物が選択されると、ダイバー・ユニット10は目標物への距離と方向とを算出する。距離と方向とはディスプレイ16上でダイバーに表示してもよい。距離と方向とを算出する様々な方法が以下に記載されるが、当業者は本発明がこれらの方法に制限されず、いかなる既存の方法も使用され得ることを正しく理解できるだろう。
【0036】
距離と方法とを算出する一つの方法は、ここでは到達時刻方法と称される。この方法はダイバー・ユニット10と目標物との間でクロックの同期が要求される。目標物は別のダイバー・ユニット10や、ボート・ユニット4、ビーコン・ユニット6であってもよい。この方法では、ダイバー・ユニット10は、ダイバー・ユニット10に既知の時刻に目標物がピング・メッセージを送信することを要求する。この要求メッセージは、送信時刻を指定してもよいし、送信時刻はプロトコルによって指定されてもよい。例えば、クロックの最下位20ビットがすべて0の場合にだけ距離を測定するためのピング・メッセージを目標ユニットが送信するように、プロトコルで指定してもよい。目標物とダイバー・ユニット10とのクロックは同期されているので、ダイバー・ユニット10はピング・メッセージの到達時刻を目標物への距離の算出に使用できる。または、20LSBがすべて0の場合にダイバー・ユニット10が目標物にピング・メッセージを送信して、目標物がピング・メッセージの到達時刻か算出した距離かのどちらか一方を応答メッセージで返してもよい。
【0037】
目標物への距離の算出に使用してもよい別の技術は、ここでは伝播時間方法と称される。この方法はダイバー・ユニット10と目標物とが同期されていない場合に有効である。この方法では、ダイバー・ユニット10は目標物に対してピング・メッセージを送信する。目標物はピング・メッセージの応答として、ダイバー・ユニット10へのピング応答メッセージを生成して送信する。ピング応答メッセージには、ピング・メッセージの受信とピング応答メッセージの送信との間の遅延を表す遅延値が含まれる。ダイバー・ユニット10は目標物への距離を算出するために、ラウンドトリップタイムとターンアラウンド遅延とを使用してもよい。
【0038】
距離を測定する第3の方法は、ここでは二重トーン方法と称される。この方法では、ダイバー・ユニット10は目標物に対して、目標物への距離の測定を支援するための二重トーン信号を送信することを要求する。応答として、目標物は、等しい電圧と出力比とを持つ二つの異なるトーンを含む二重トーンを送信する。各トーンの電圧は移動した距離の既知の関数に従って減衰する。各トーン要素の減衰比の知見により、ダイバー・ユニット10はトーン要素の受信電圧の差に基づいて目標物への距離を算出できる。
【0039】
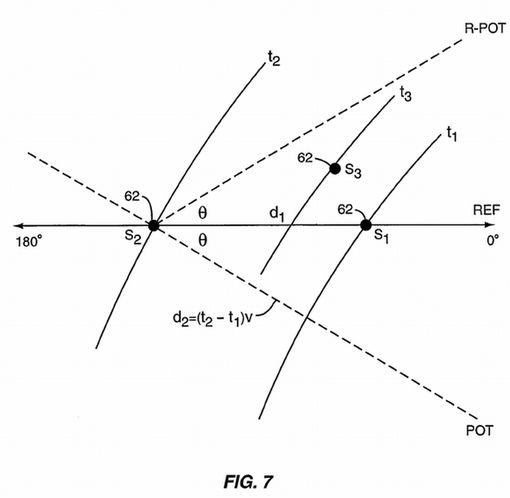
目標物への方向を測定するために、ソナー送受信器はソナー送受信器62の配列を含む。水中での信号の伝達速度が既知であると仮定すると、図7に示すように2個以上の送受波器で信号の到達の時間差に基づいてダイバー・ユニット10は目標方向を測定できる。図7で、第1、第2のソナー送受波器はそれぞれS1,S2で表される。REFで示されるS1とS2とを結んだ直線は、方向についての角度基準の役割をする。目標物からの信号は、時刻T1にソナーS1に到達し、時刻T2にソナーS2に到達する。ソナーS1とS2との基準線REF上での距離d1は既知である。信号の伝達経路に沿った距離d2は、ソナーS1とS2とにおける信号の到達時刻に基づいて、時刻の差に信号の速度vを乗じることによって算出してもよい。比の値d2/d1のアークコサインにより、基準線REFと伝達経路(POT:path of travel)とがなす角度を算出する。
【0040】
2次元での方向を明確に示すためには、実際の伝達経路(POT)と、REFについての反射伝達経路(R−POT)を区別するための第3のソナーS3が必要となる。当業者は、反射伝達経路(R−POT)に対応する線に沿って伝達する信号は、ソナーS1とS2とで、同じ到達時間の差を生み出すだろうことを正しく理解するだろう。第3のソナーによって、ナビゲーション支援装置10が実際の伝達経路(POT)とその反射(R−POT)とを区別できる。ソナーS3は、ソナーS1とソナーS2とを結ぶ基準線REF上から外れた位置にある。3次元での方向を測定するためには、少なくとも4個のソナー送受波器62が必要であり、そのうちの1個はその他3個を通る平面の外になければならない。
【0041】
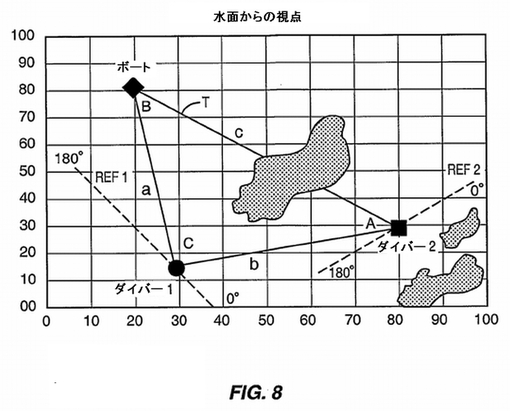
図8は障害に遮られている目標物への距離と方向とを測定する方法を説明したものである。図8は2人のダイバーとダイブ・ボートとの位置を示した俯瞰図である。ダイバー・ユニット1はダイブ・ボートに対して開けた視界を有するが、ダイバー・ユニット2のダイブ・ボートへの視界はさんご礁や陸の塊で遮られている。ダイバー・ユニット2はダイブ・ボートへの距離と方向とを獲得したいが、ダイブ・ボートと直接に通信することはできない。この状況では、ダイバー・ユニット2は、ロケーション支援要求メッセージを送信することで、ダイバー・ユニット1にナビゲーション支援を要求することができる。ダイバー・ユニット1はREF1に対するダイブ・ボートへの距離と方向とを算出できる。さらに、ダイバー・ユニット1はREF1に対するダイバー・ユニット2への距離と方向とを算出できる。従って、基準三角形Tのうち、距離a、bと角度Cはダイバー1に既知である。余弦定理を使って、ダイバー・ユニット1はダイバー・ユニット2とダイブ・ボートとの距離cを算出できる。ひとたび距離cが既知となれば、ダイバー・ユニット1は正弦定理を使って、ダイバー・ユニット1の現在地点とダイバー・ユニット2の現在地点とを結んだ第1の直線と、ダイバー・ユニット2の現在地点とダイブ・ボートの現在地点とを結んだ第2の直線との挟角Aを算出できる。その後、ダイバー・ユニット1は、ダイバー・ユニット2の現在地点からダイブ・ボートへの距離cと、ダイバー・ユニット2との挟角とを送信できる。ダイバー・ユニット2は自己の基準線REF2に対する基準三角形Tの直線b、cの方向を知らないため、ダイバー・ユニット2にとって挟角Aが方向を示さないのが問題となる。
【0042】
ダイブ・ボートへの方向を測定するために、ダイバー・ユニット2は、直線cと自己の角度基準REF2とを関連付ける必要がある。ダイブ・ボートとREF2との方向を関連付けるために、ダイバー・ユニット2はREF2に対するダイバー・ユニット1の方向を算出できる。挟角Aは、ダイバー・ユニット1の現在地点とダイバー・ユニット2の現在地点とを結ぶ直線を基準としているため、REF2に対するダイブ・ボートの方向を測定するために、ダイバー・ユニット2は、ダイバー・ユニット1の方向に挟角Aを加えることでダイブ・ボートの方向を算出できる。
【0043】
以下は図8に基づいた実施例である。単純のために、計算は2次元だけを考慮する。当業者はこの方法を容易に3次元に拡張できる。
【0044】
この例では、ダイバー・ユニット2は、ダイバー1にロケーション支援要求メッセージを送信することで、ダイバー1からのナビゲーション支援を要求したところである。ダイバー・ユニット1は、ダイブ・ボートへの自己の距離と方向とを測定する。ダイブ・ボートへの方向は、ダイバー・ユニット1の自己の角度基準REF1に対して測定される。この例では、方向はREF1に対して216度で、距離は約65.75mである。次に、ダイバー・ユニット1は、ダイバー・ユニット2への距離(約52.20m)と方向(REF1に対して約298度)を測定する。ダイバー・ユニット1は基準三角形Tの挟角Cを算出して、約82度とわかる。現時点で、ダイバー・ユニット1は基準三角形Tの距離a、bと挟角Cとを知る。そこで、ダイバー・ユニット1は、余弦定理(式1)によって、ダイバー・ユニット2からダイブ・ボートへの距離cを算出できる。
c2=a2+b2−2abcosC (式1)
ダイバー・ユニット2からダイブ・ボートへの距離cを算出した結果、約78mである。挟角Aは正弦定理(式2)によって算出できる。
a/sinA=b/sinB=c/sinC (式2)
挟角Aは算出された結果、約56.6度である。ダイバー・ユニット1は距離c(78.1m)と挟角A(56.6度)とをダイバー・ユニット2に送信する。挟角Aに自身からダイバー・ユニット1への方向を加えることで、ダイバー・ユニット2はダイブ・ボートの基準REF2に対する方向を算出でき、その結果は約255度である。別の実施態様では、ダイバー・ユニット2は、2個のユニットを結ぶ直線のREF2に対する角度をダイバー・ユニット1に送信することもできるだろう。この場合、ダイバー・ユニット1は、ダイバー・ユニット2の自己の内部基準に対するダイブ・ボートへのダイバー・ユニット2の方向を算出できるだろう。
【0045】
上記で与えられた例では、ダイバー・ユニット1がダイバー・ユニット2からダイブ・ボートへの距離cと基準三角形Tの挟角Aとを算出して、その結果をダイバー・ユニット2に送信する。その代わりに、ダイバー・ユニット1がダイバー・ユニット1からダイブ・ボートへの距離aと基準三角形Tの挟角Cとをダイバー・ユニット2に送信して、ダイバー・ユニット2が上述したその後のすべての計算を実行することができるだろう。この場合、ダイバー・ユニット2は前述の距離測定技術のいずれか使用してもダイバー・ユニット1との距離を算出できるだろう。距離a、bと挟角Aとを知っている。その結果、ダイバー・ユニット2はダイブ・ボートへの距離cと挟角Aを算出できるだろう。基準REF2に対するダイブ・ボートへの方向を算出するための残りの計算は、前述したものと同じである。
【0046】
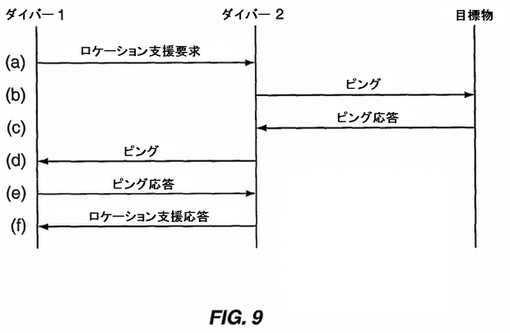
図9は障害に遮られた目標物への距離と方向とを獲得する好適な手続きを説明するものである。ダイバー1は、目標物への距離と方向との算出の支援を要求するために、ダイバー2にロケーション支援要求メッセージを送信する(ステップa)。ロケーション支援要求メッセージの応答として、ダイバー2はピング・メッセージを目標物に送信する(ステップb)。その応答として、目標物はピング応答メッセージをダイバー2に送信する(ステップc)。つぎに、ダイバー2はピング・メッセージをダイバー1に送信して(ステップd)、その応答として、ダイバー1はピング応答メッセージをダイバー2に送信する(ステップe)。距離がすでに既知の場合には、ステップ(b)、(c)、(d)及び(e)を省略できる。この時点でダイバー2は、ダイバー1から目標物への距離と方向とを算出するために必要な情報をすべて取得している。ダイバー2は、ダイバー1から目標物への距離と方向とを算出して、ロケーション支援応答メッセージでその情報をダイバー1に送信する。
【0047】
当然のことながら、本発明の範囲と本質的な特徴とを逸脱することなしに、ここで説明した方法とは異なる特定の方法で本発明を実行できるだろう。従って、本実施態様は、すべての観点で例示的であり、非制限的であると考えられるべきで、添付の特許請求の範囲の意味と均等な範囲とに付随するすべての変形はそこに包含されることを意図している。
【0048】
補遺A
【図面の簡単な説明】
【0049】
【図1】本発明に係る通信システムの一例を説明したものである。
【図2】本発明の好適な一実施態様に係るダイバー・ユニットの一例を説明したものである。
【図3】ダイバー・ユニットの主な構成要素を説明した機能ブロック図の一例である。
【図4】水中での通信のための好適な時分割多元接続方式の一例を説明したものである。
【図5】水中での通信のための好適なメッセージ書式の一例を説明したものである。
【図6】水中での通信のための好適な変調の一例を説明したものである。
【図7】目標物への方向を測定する方法の一例を説明したものである。
【図8】障害に遮られたダイバーが目標物への距離と方向を測定する技術の一例を説明した俯瞰図である。
【図9】障害に遮られたダイバーが目標物への距離と方向とを測定する好適な手続きの一例を説明したフローチャートである。
【技術分野】
【0001】
本発明は一般に水中でのナビゲーション支援に関し、さらに詳しくは、障害に遮られた目標物への方向と距離とを算出する方法と装置に関する。
【背景技術】
【0002】
レクリエーションのダイビングは人気のあるスポーツであり、急速に成長している。レクリエーションのダイバーがしばしば遭遇する問題に、水中でのナビゲーションがある。ダイバーはしばしば、停泊したダイブ・ボートや水中のアトラクション(例えばさんご礁や沈没船)のような特定の場所にどうにかしてたどり着く必要がある。さらに、水中のダイバーがダイビング仲間の場所を探す必要があることもある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
視覚によるナビゲーションが常に役に立つとは限らない。例えばダイバーが、視界の悪い水域にいるかもしれないし、関心対象の人や物からとても遠い位置にいるかもしれない。さらに、ダイバーと所望の目標物との間に障害物があるかもしれない。これらのような状況では、ダイバーは方向を知るために浮上する必要があるかもしれない。浮上には減圧が必要となるため不便かもしれない。
【課題を解決するための手段】
【0004】
本発明は浮上を必要としない水中でのナビゲーションを容易にするダイバー用ナビゲーション支援を提供する。ナビゲーション支援(以下、ダイバー・ユニットとも言う)はダイバーの腕に装着されてもよい。ダイバー・ユニットはソナー周波数を通じてボート・ユニット、ビーコン・ユニット、又はその他のダイバー・ユニットと通信する。ボート・ユニット、ビーコン・ユニット、又はその他のダイバー・ユニットは同じ周波数と時分割多元接続方式とを使用して通信する。目標物への距離と方向とを獲得するために、さまざまな技術が使用され得る。目標物はダイブ・ボートかもしれないし、水中アトラクションに位置するビーコンかもしれないし、仲間のダイバーかもしれない。
【0005】
発明の一つの態様では、2個のダイバー・ユニット間で方向情報を通信するためのプロトコルが確立される。2個のダイバー・ユニット間で方向情報を通信できるため、第1のダイバー・ユニットは第2のダイバー・ユニットに対してナビゲーション支援を提供することが可能となる。現在のところ、角度の測定における共通の基準が欠けているため、1個のダイバー・ユニットからもう1個のダイバー・ユニットへ方向情報を伝達する有効な方法は存在しない。本発明によれば、目標物に対して視界か障害に遮られていない第1のダイバー・ユニットは、第2のダイバー・ユニットの目標物への距離と方向とを算出することができ、その距離と方向との情報を第2のダイバー・ユニットに伝達することができる。第1のダイバー・ユニットから第2のダイバー・ユニットに伝達される方向情報は、第1のダイバー・ユニットと第2のダイバー・ユニットとの両方にすでに知られているか決定することができる、共通の基準線に関連する。ある実施態様では、1個のダイバー・ユニットから別のダイバー・ユニットに伝達される方向情報は、第1のダイバー・ユニットの現在地点と第2のダイバー・ユニットの現在地点とを結んだ直線を基準とする。両ダイバー・ユニットは自己の内部の角度基準に対する共通の基準線の方向を測定できるため、受信ダイバー・ユニットは受信した方向情報を自己の内部の基準に合わせて変換することができる。
【発明を実施するための最良の形態】
【0006】
添付の図を参照すると、図1は、ボート・ユニット4、1個以上のビーコン・ユニット6、多数のダイバー・ユニット10を備える通信システム2を説明したものである。ボート・ユニット4は通常、「マスター・ユニット」として機能し、通信システム2内の様々なエンティティ間の通信を制御する。ビーコン・ユニット6は主に指標として使用され、後述のとおりダイバー・ユニット10へナビゲーション支援を提供できる。ビーコン・ユニット6は水面に位置していてもよいし、水中に位置していてもよい。ボート・ユニット4が存在しない場合には、ビーコン・ユニット6はマスター・ユニットとして機能することもできる。ビーコン・ユニット6が2個以上ある場合には、最も大きい(または、最も小さい)アドレスのビーコン・ユニット6をマスター・ユニットとして動作させるために選択してもよい。ダイバー・ユニット10はダイバーに装着され又は持ち運ばれ、水中での通信とナビゲーションとに使用される。ボート・ユニット4もビーコン・ユニット6も存在しない場合、ダイバー・ユニット10はマスター・ユニットとして機能することができる。ダイバー・ユニット10が2以上ある場合には、最も大きい(または、最も小さい)アドレスのダイバー・ユニット10をマスター・ユニットとして動作させるために選択してもよい。
【0007】
図2は好適なダイバー・ユニット10の一例を説明したものである。ダイバー・ユニット10は、リストバンド14に搭載された防水筐体12を備える。ダイバー・ユニット10は、液晶ディスプレイのような電子ディスプレイ16、一つ以上の入力装置18を含む。図1に示される好適な実施形態では、スクロールホイール20と入力/送信ボタン22とを含む。当業者であれば、ジョイスティック・コントローラーやキーボード、タッチパッドのようなその他の入力装置が、ユーザ入力のために使用可能であることを認識するであろう。さらに、ディスプレイ16はユーザ入力を受けるためにタッチスクリーン・ディスプレイを備えてもよい。
【0008】
ディスプレイ16の外縁24は、「バディ」や「ビーコン」など、ダイバー・ユニット10の様々な機能を表示する一連のラベル26を含む。機能表示器28は現在選択中の機能を指す。図2において、機能表示器28はコンパス機能が選択されていることを表す。さらに、ディスプレイ16は、状態情報をユーザに提供するために、電力表示器30、アラーム表示器31のような、その他の状態表示器を表示してもよい。スクロールホイール20を回転することや入力/送信ボタン22を押すことで機能表示器28を動かして機能を選択することができる。
【0009】
スクロールホイール20の回転の作用は、状況に依存してもよい。例えば、スクロールホイール20を回転して所望の機能に指針28を移動することができる。それから、入力/送信ボタン22を押すことで機能を選択してもよい。ひとたび機能が選択されたなら、選択した機能に関連するメニューやオプション全体をスクロールするのにスクロールホイール20の回転を使用することができる。例えば、ユーザが「バディ」を選択したとすると、スクロールホイール20はバディの一覧全体をスクロールして、一人のバディを選択するために使用してもよい。
【0010】
状態表示器に加えて、ディスプレイ16はダイバーの鑑賞のための有益な情報を出力するために使用される。好適な実施態様では、ディスプレイ16は方向指示器32を表示することができる。詳細は後述するが、方向指示器32は水中でナビゲーションするために目標物への方向を表すことができる。ディスプレイ16はさらに、ダイバーに数値データ及び英数字データを表示するために、数字表示領域又は英数字表示領域を含んでもよい。表示される数値データの例は、現在の水深、特定の目標物への距離、現在の時刻、現在の緯度経度を含む。これらの例は表示され得るすべての情報の包括的な一覧を意図したものではなく、表示されてよい情報の種類を単に説明したものである。
【0011】
図3はダイバー・ユニット10の主な構成要素を説明した機能ブロック図である。主な構成要素として、ダイバー・ユニット10のデータ処理と動作制御とのための処理回路50、処理回路50によって使用される符号とデータとを蓄えるメモリ52、ディスプレイ16とユーザ入力装置18とを含むユーザ・インターフェイス54、通信インターフェイス56を備える。処理回路50は一つ以上のプログラム可能なプロセッサを備えてもよく、それらは汎用マイクロプロセッサやマイクロコントローラ、デジタル信号プロセッサ、又はこれらの組合せでもよい。メモリ52はダイバー・ユニット10のメモリの全階層を代表し、分散したメモリ装置を備えてもよいし、一つ以上のマイクロプロセッサの内部メモリを備えてもよい。通信インターフェイス56は、水上で使用する無線インターフェイス58と水中通信のためのソナー送受信器60を備える。無線インターフェイスは例えば標準化されたBluetooth、802.11b、802.11gインターフェイスを備えてもよい。
【0012】
ボート・ユニット4とビーコン・ユニット6とは図3で示されるのと同じ機能の構成要素を備えてもよい。しかし、ボート・ユニット4は異なるユーザ・インターフェイス54を備えてもよい。ビーコン・ユニット6からはユーザ・インターフェイス54を削除することができる。
【0013】
別の実施態様では、ダイバー・ユニット10は、ダイバーがいつ潜水したかを検知するために接触点(contact)36を含んでもよい。ダイバーが潜水するとき、少しの量の水流が接触点36の間を流れ、それがダイバーの着水を表す。それに応じて、処理回路50は無線送受信器58を無効にして、ソナー送受信器60を有効にしてもよい。
【0014】
ダイバー・ユニット10はダイバーに水中での通信とナビゲーション機能とを提供する。水中での通信は約5kHzから約200kHzの範囲のソナー周波数で発生する。採用され得る水中での通信のための比較的単純で強固な通信システムを以下に記述する。しかし、当業者は、どの既知の通信システムであっても以下に記述するシステムと置換可能であることが分かるだろう。
【0015】
ある好適な実施態様では、すべての水中の装置は時分割多元接続方式(TDMA)を使用して同じ周波数で通信するが、符号分割多重接続方式を採用してもよい。TDMAは通信帯域を送信データ及び受信データとの内、少なくともいずれかに使用される連続した時間スロットに分割する。装置は自分に割り当てられた時間スロットでだけ送信及び受信との内、少なくともいずれかを行う。非繰り返し(non−repeating)時間スロットの集合はフレームを構成する。標準化されたTDMAシステムでは、フレームは固定長を持ち、フレーム・タイミングはすべてのユニットに既知である。本発明では、フレームはダイバー・ユニット10間の伝播遅延に対応した可変長フレームであり、所定のフレーム・タイミングは有さないとする。
【0016】
図4は、マスター・ユニットの役割をする1個のボート・ユニット4とn個のダイバー・ユニット10とに対応するTDMAフレームのフレーム構造を説明したものである。図4に示されるn人のダイバーのシナリオの例では、各ダイバー・ユニット10は2個の時間スロットを割り当てられる。従って、20ミリ秒の各区間ごとにフレームは2n+m個のスロットを含む。ここで、nはダイバーの数であり、mはボート・ユニット4に割り当てられたスロット数である。図4に示される実施態様では、フレーム内の先頭の3個の時間スロットがボート・ユニット4に割り当てられ、このボート・ユニット4がマスター・ユニットとして機能する。各ダイバー・ユニット10には連続した2個の時間スロットが割り当てられる。しかし、ダイバー・ユニット10に連続した時間スロットが割り当てられる必要はない。ボート・ユニット4や他のマスター・ユニットは8個のアドレスまで持ってもよく、各アドレスに時間スロットを割り当ててもよい。当業者は1個以上のボート・ユニットが存在し得ることを正しく理解できるだろう。この場合、ボート・ユニットの一つがマスター・ユニットとして機能するために選択される。さらに、図4には図示されていないが、ビーコン・ユニット6が存在してもよいし、このビーコン・ユニット6に後述するのと同様に時間スロットを割り当ててもよい。
【0017】
各ダイバー・ユニット10は割り当てられた時間スロットの使用を制御する。ダイバー・ユニット10は第1の時間スロットで送信してもよいし、第2の時間スロットを送信又は受信に使用してもよい。例えば、第1のダイバー・ユニット10は自己の第1の時間スロットで第2のダイバー・ユニット10にメッセージを送信して、第2のダイバー・ユニット10が第1のダイバー・ユニット10に、第1のダイバー・ユニット10の第2の時間スロットを使って応答を送信してもよい。従って、送信と受信とのための連続した時間スロットの使用は、別のユニットとメッセージを交換する便利な方法を提供する。
【0018】
図4はまた、スロットの書式を説明する。各時間スロット内に、時間スロットの先頭と末尾とにガードバンドがある。各時間スロットの残りの時間はメッセージ・データの送信に使用される。発明のある実施態様では、各時間スロットは一つのメッセージの送信又は受信に使用される。しかし、当業者はメッセージの継続期間がスロットの幅と比較して短いときは、一つの時間スロットで複数のメッセージを送信できるだろうことを正当に理解できるだろう。反対に、メッセージ長がスロットの幅よりも長い場合には、メッセージは分割され、複数のスロットで送信できるだろう。
【0019】
図5に好適なメッセージの書式の一例が示される。メッセージは、メッセージ・ヘッダとメッセージ本文を含む。好適な実施態様では、メッセージ・ヘッダは同期信号(8ビット)、コマンド(8ビット)、宛先アドレス(32ビット)、及び送信元アドレス(32ビット)を含む。同期信号はメッセージの開始を表すのに使用される既知のビットパターンである。コマンド要素は受信ユニットにメッセージの種類を示す。メッセージが複数の時間スロットにわたる場合には、現在のスロットのメッセージデータが直前のスロットで送信されたメッセージに連続するかを表すためにコマンド要素を使用できるだろう。宛先アドレス要素は所望のメッセージの受信者を表す。送信元アドレス要素はメッセージの送信者を表す。各ユニットは、メッセージの宛名となるアドレスとして使用される固有のユニットIDを有する。例えば、送信元アドレス欄にダイバー・ユニットA用のユニットIDを設定し、宛先アドレス欄にダイバー・ユニットB用のユニットIDを設定することで、ユニットAからユニットBへのメッセージの宛先を指定できる。ユニットIDとアドレスとの両用語は、以下では同義語として使用される。
【0020】
補遺Aの表は、水中での通信システム2で使用され得る好適なメッセージの一覧の一例を含む。これらのメッセージを以下に簡潔に記述する。用法とメッセージ構文とに関するさらなる詳細は補遺にて与えられる。
【0021】
メッセージは大まかに五つのカテゴリーに分類できる。これらの五つのカテゴリーは、クロック同期化メッセージ、距離・方向メッセージ、通信メッセージ、初期化メッセージ、雑メッセージを含む。クロック同期化メッセージは異なるユニット間のクロックを同期するために使用される。距離・方向メッセージは2個のユニット間の距離と方向とを測定するために使用される。通信メッセージはメッセージの送信に使用される。初期化メッセージは通信の確立に使用される。雑メッセージはその他の機能に使用される。
【0022】
クロック同期化メッセージは、クロック同期メッセージ、クロック同期要求メッセージ、クロック同期応答メッセージ、クロック同期検証メッセージを含む。クロック同期要求メッセージは、2個のユニット間のクロックの同期を要求するために、要求ユニットから応答ユニットに対して送信される。クロック同期要求はオプションとして、周辺の水温と現在の水深とを含めてもよい。これが可能ならば、距離と時間との算出の精度が向上する。
【0023】
クロック同期メッセージは、クロック同期要求メッセージの応答として送信される。クロック同期メッセージは送信ユニットの現在のクロックを含む。送信ユニットのクロックは初期化手続きにおいて、マスター・クロックとして使用される。受信ユニットは、クロック同期メッセージから得た現在のクロックと、送信ユニットからの距離とを使用して、自己のクロックを更新することができる。受信ユニットが送信ユニットへの距離を知らない場合は、送信ユニットは、クロック同期メッセージの直前に、後述するピング応答メッセージを送信してもよい。その結果、受信ユニットは送信ユニットへの距離を算出できる。クロック同期応答メッセージはクロック同期メッセージの応答として送信される。クロック同期応答メッセージには、クロック同期応答メッセージを受信する時点の受信ユニットのクロックの予想値を含めることができる。受信ユニットは、予想時刻とクロック同期応答メッセージを受信した時点の受信ユニットのクロックとを比較する。その時間が所定の許容誤差内であれば、クロックは同期している。同期していない場合は、受信ユニットはさらにクロック同期メッセージを送信してもよい。クロック同期検証メッセージはあるユニットから別のユニットに、それらのクロックが同期していることを検証するため送信される。
【0024】
距離・方向メッセージは、ピング・メッセージ、ピング応答メッセージ、ロケーション支援要求メッセージ、ロケーション支援応答メッセージ、確認メッセージ、及び確認応答メッセージを含む。ピング・メッセージとピング応答メッセージとは、2個のユニット間の距離と方向とを測定するために使用される。ピング応答メッセージは前述のとおり、クロック同期要求の応答としても送信することができる。第1のユニットは第2のユニットにピング・メッセージを送信する。ピング・メッセージは、ピング・メッセージが送信されたときの送信ユニットの現在クロックを表すクロック値を含む。第2のユニットは応答としてピング応答メッセージを送信する。ピング応答メッセージは、処理遅延を算出するために、ピング・メッセージの受信とピング応答メッセージの送信との間の経過時間を表すクロック値を含む。その結果、第1のユニットは、到達時刻方法又は伝播時間方法を使用して、2個のユニット間の距離を算出できる。
【0025】
ロケーション支援要求メッセージは、ナビゲーション支援の要求に使用される。ロケーション支援要求メッセージは、典型的に、1個のダイバー・ユニットからビーコン・ユニット6か別のダイバー・ユニット10に送信されるが、ボート・ユニット4やその他のマスター・ユニットに送信されてもよい。ロケーション支援要求メッセージは、メッセージ本文に、要求ユニットが場所を知りたい目標物のユニットIDを指定する。ロケーション支援応答メッセージは、ロケーション支援メッセージの応答として送信される。ロケーション支援応答メッセージは、ロケーション支援要求メッセージを送信したユニットからの、ロケーション支援要求メッセージで指定された目標物への距離と方向を含む。ロケーション支援応答メッセージはオプションとしてターゲットの水深を含んでもよい。
【0026】
確認メッセージと確認応答メッセージとは距離と方向との測定の検証に使用される。確認メッセージは、送信ユニットの水深と、その指定した目標物への距離及び方向とを含む。そして、応答ユニットは、第1のユニットから受信した値を比較することで、第1のユニットにとっての指定したターゲットへの距離と方向とを算出することができる。確認応答メッセージは、距離と方向との測定の検証が完了したかどうかを表す。
【0027】
通信メッセージはポイント・ツー・ポイント・メッセージ、ポイント・ツー・マルチポイント・メッセージ、通信リレー要求メッセージ、及び再送要求メッセージを含む。ポイント・ツー・ポイント・メッセージは、あるユニットから別のユニットにメッセージを送信するのに使用される。所望の受信者はメッセージの宛先アドレスのよって指定される。ポイント・ツー・マルチポイント・メッセージはメッセージをユーザのグループへマルチキャストするのに使用される。ポイント・ツー・マルチポイント・メッセージは、メッセージの宛先アドレス欄にグループIDを設定することによって表される。所定のグループIDはすべてのユニットを含むマスター・グループを表すのに使用してもよい。緊急メッセージは緊急な状況を表すために使用される。通信リレー要求メッセージは、第1のユニットから第2のユニットに対して、特定の目標ユニットへの一つ以上のメッセージを第2のユニットに中継するように要求するために送信される。これは、所望の受信者が障害に遮られているときに有効である。このメッセージは、メッセージの中継を中止するためにも送信される。
【0028】
初期化メッセージは、初期化フレーム・メッセージ、ユニット順列メッセージ、及びユニット順列肯定応答メッセージを含む。初期化フレーム・メッセージは初期化手続きの開始に使用される。初期化手続きは送信順列を確立するための手続きである。初期化フレーム・メッセージは、ボート・ユニット4又はその他のマスター・ユニットから、自身以外のすべてのユニットに対して送信される。ユニット順列メッセージは、特定のダイバー・ユニット10に送信順列での自身の位置を表すために、ボート・ユニット4又は他のマスター・ユニットからその特定のダイバー・ユニット10に送信される。送信順列での位置は、ユニット順列メッセージの本文に、直前のダイバー・ユニット10のユニットIDを含めることで表す。例えば、ダイバーBに送信されるユニット順列メッセージは、そのメッセージ本文にダイバーA用ユニットIDを含めてもよい。その結果、ダイバー・ユニットBは、ダイバー・ユニットAの後に送信することがわかる。ユニット順列肯定応答メッセージは、ユニット順列メッセージの受信を確認するために、ダイバー・ユニット10からボート・ユニット4又は他のマスター・ユニットに送信される。
【0029】
雑メッセージは、ウェイポイント・メッセージ、フレーム・メッセージ、支援調査メッセージ、及び調査応答メッセージを含む。ウェイポイント・メッセージは、ビーコン・ユニットを始動又は停止するため、ダイバー・ユニット10からビーコン・ユニット6に送信される。ウェイポイント・メッセージは、31ビットの認証符号と、ビーコン・ユニット6を始動又は停止するための1ビットのコマンドとを含む。フレーム・メッセージは、フレームの開始を表すために、ボート・ユニット4又はその他のマスター・ユニットからダイバー・ユニット10に送信されるブロードキャスト・メッセージである。フレーム・メッセージはフレーム・メッセージが送信されたときの現在時刻を含む。ダイバー・ユニット10がマスター・ユニットとクロックの同期がされているなら、フレーム・メッセージはマスター・ユニットまでの距離を測定し、クロックを同期するために使用できる。支援調査メッセージは、ナビゲーション支援と通信支援とを要求するために、ダイバー・ユニット10から送信される。支援調査メッセージは、要求された支援の種類を表す種類パラメータを含み、オプションとして特定の種類のユニット(例えば、ボート・ユニット、ビーコン・ユニット、ダイバー・ユニットなど)だけを調査するために、ユニット種類のマスクを含んでもよい。調査応答メッセージは、要求の受諾又は拒絶を表すために、支援調査メッセージの応答として送信される。
【0030】
図4に示すn人のダイバーの例を参照すると、マスター・ユニットとして機能するボート・ユニット4とn個のダイバー・ユニットとが、所定の順列で送信する。通信を開始する前に、マスター・ユニット(例えばボート・ユニット4)は送信順序を規定して、他のすべてのユニット(例えば、ダイバー・ユニット10、存在する場合にはその他のボート・ユニット4やビーコン・ユニット6)にその送信順序の中でのそれらの順番を通知する。初期化手続きの間、ボート・ユニット4又はその他のマスター・ユニットは、各ダイバー・ユニット10又は存在するその他のユニットに、ユニット順列メッセージを送信する。このメッセージは、転送順列における自己の直前のダイバー・ユニット10又はその他のユニットを特定する。ダイバー・ユニット1の場合、直前のダイバー・ユニット10は、ボート・ユニット4となる。各ダイバー・ユニット10がユニット順列メッセージの受信を確認した場合、初期化手続きは完了する。通常の操作の間、各ダイバー・ユニット10は直前のダイバー・ユニット10を起点とする送信を探知する。これは、特定のユニットのスロット1を使用して送信されたメッセージのヘッダに含まれる送信元アドレスと、スロット2を使用して送信されたメッセージの送信元アドレス又は宛先アドレスとによって決定できる。直前のダイバー・ユニット10又は他のユニットが転送を終了したとの検知した後、後続のダイバー・ユニット10又はその他のユニットは、所定の時間を待ってから送信を行う。所定の時間の長さは衝突を防ぐための長さが選択される。従って、フレーム長はダイバー・ユニット10の個数とダイバー・ユニット10間の伝送遅延とに依存するだろう。
【0031】
送信順序が連続する2個のダイバー・ユニット10の間に障害物がある場合に問題が生じるかもしれない。この状況では、第2のダイバー・ユニット10は、第1のダイバー・ユニット10からの通信を聞き取ることができないかもしれない。一つの結末では、第2のダイバー・ユニット10が送信しないため、通信は行き詰るだろう。この状況では、ボート・ユニット4は、所定の時間の範囲内に何の信号も検知しない場合には、新たなフレーム・メッセージを送信することによって、送信順列を再開してもよい。通信が引き続き行き詰った場合、ボート・ユニット4は送信順序を変更するために初期化手続きを行使することができる。送信順序を変更してもこの問題が解決しない場合は、通信を行き詰らせているダイバー・ユニット10は送信順列から外され得る。
【0032】
好適な実施態様では、搬送周波数は200キロヘルツで、ビット間隔は0.06ミリ秒(60マイクロ秒)であり、これは約16.67キロbpsのデータ転送速度に等しい。一つのメッセージは合計112ビットを備える。従って、一つのメッセージを送信するのに6.72ミリ秒かかる。
【0033】
図6はどのようにデータを搬送周波数に変調するかを説明したものである。図6でクロック信号、データ信号、及び変調信号を説明する。クロック信号は60マイクロ秒周期であり、これはビット周期に等しい。データ信号は送信される2値データを表す。変調信号は、クロック信号と同じ周波数のパルス列を備える。変調信号で既定のパルスのパルス幅は、データ信号の状態によって決定される。データ信号がローの場合、比較的短いパルスが「0」ビットを表すために生成される。逆に、データ信号がハイの場合、比較的長いパルスが「1」ビットを表すために生成される。好適な実施態様では、0ビットを表す短いパルスは15マイクロ秒の期間で、1ビットを表す長いパルスは45マイクロ秒である。オン/オフ・キーイングは搬送波を変調するのに使用される。搬送波は、変調信号がハイの場合にオンになり、変調信号がローの場合にオフになる。受信機は、信号を検知するために、パルスの立ち上がりを検知してから37マイクロ秒後に信号をサンプリングする。別の実施態様では、送信機のクロック速度の変化を補正するために、立ち上がりの検知の後に様々なサンプリング時間が使用されてもよい。さらに詳しくは、受信ユニットは、送信機のクロック周期を決定してそれに応じてサンプリング時間を調整するために、パルスの立ち上がりの時間間隔を測定してもよい。同期信号が送信されたときにクロック周期の測定を実施してもよい。好適な実施態様では、サンプリング時間Tsは送信クロック周期に0.625を乗じることで決定される。
【0034】
前述したとおり、ダイバー・ユニット10はナビゲーション支援を提供する。特に、ダイバー・ユニット10は方向表示器32を通じて特定の目標物への距離と方向とを表示できる。特定の目標物は、ダイブ・ボート、ビーコン(水面ビーコンや水中ビーコンかもしれない)、他のダイバー(以下、バディ)を含んでもよい。目標物を選択するためのスクロールホイール20とボタン22とを使用して表示器28を動かすことによって、所望の目標物を選択できる。例えば、ユーザは、スクロールを回転することで表示器28を「バディ」に動かして、入力ボタン22を押してもよい。バディがメモリに記憶されている場合、バディの名前がディスプレイに表示されるだろう。複数のバディがメモリに記憶されている場合には、ユーザはスクロールホイール20を回転することでバディの一覧をスクロールすることができる。所望のバディの名前がディスプレイに表示されたときに、入力ボタン22を押すことでバディが選択される。同じ方法をボートやビーコンの選択に使用できる。
【0035】
ひとたび特定の目標物が選択されると、ダイバー・ユニット10は目標物への距離と方向とを算出する。距離と方向とはディスプレイ16上でダイバーに表示してもよい。距離と方向とを算出する様々な方法が以下に記載されるが、当業者は本発明がこれらの方法に制限されず、いかなる既存の方法も使用され得ることを正しく理解できるだろう。
【0036】
距離と方法とを算出する一つの方法は、ここでは到達時刻方法と称される。この方法はダイバー・ユニット10と目標物との間でクロックの同期が要求される。目標物は別のダイバー・ユニット10や、ボート・ユニット4、ビーコン・ユニット6であってもよい。この方法では、ダイバー・ユニット10は、ダイバー・ユニット10に既知の時刻に目標物がピング・メッセージを送信することを要求する。この要求メッセージは、送信時刻を指定してもよいし、送信時刻はプロトコルによって指定されてもよい。例えば、クロックの最下位20ビットがすべて0の場合にだけ距離を測定するためのピング・メッセージを目標ユニットが送信するように、プロトコルで指定してもよい。目標物とダイバー・ユニット10とのクロックは同期されているので、ダイバー・ユニット10はピング・メッセージの到達時刻を目標物への距離の算出に使用できる。または、20LSBがすべて0の場合にダイバー・ユニット10が目標物にピング・メッセージを送信して、目標物がピング・メッセージの到達時刻か算出した距離かのどちらか一方を応答メッセージで返してもよい。
【0037】
目標物への距離の算出に使用してもよい別の技術は、ここでは伝播時間方法と称される。この方法はダイバー・ユニット10と目標物とが同期されていない場合に有効である。この方法では、ダイバー・ユニット10は目標物に対してピング・メッセージを送信する。目標物はピング・メッセージの応答として、ダイバー・ユニット10へのピング応答メッセージを生成して送信する。ピング応答メッセージには、ピング・メッセージの受信とピング応答メッセージの送信との間の遅延を表す遅延値が含まれる。ダイバー・ユニット10は目標物への距離を算出するために、ラウンドトリップタイムとターンアラウンド遅延とを使用してもよい。
【0038】
距離を測定する第3の方法は、ここでは二重トーン方法と称される。この方法では、ダイバー・ユニット10は目標物に対して、目標物への距離の測定を支援するための二重トーン信号を送信することを要求する。応答として、目標物は、等しい電圧と出力比とを持つ二つの異なるトーンを含む二重トーンを送信する。各トーンの電圧は移動した距離の既知の関数に従って減衰する。各トーン要素の減衰比の知見により、ダイバー・ユニット10はトーン要素の受信電圧の差に基づいて目標物への距離を算出できる。
【0039】
目標物への方向を測定するために、ソナー送受信器はソナー送受信器62の配列を含む。水中での信号の伝達速度が既知であると仮定すると、図7に示すように2個以上の送受波器で信号の到達の時間差に基づいてダイバー・ユニット10は目標方向を測定できる。図7で、第1、第2のソナー送受波器はそれぞれS1,S2で表される。REFで示されるS1とS2とを結んだ直線は、方向についての角度基準の役割をする。目標物からの信号は、時刻T1にソナーS1に到達し、時刻T2にソナーS2に到達する。ソナーS1とS2との基準線REF上での距離d1は既知である。信号の伝達経路に沿った距離d2は、ソナーS1とS2とにおける信号の到達時刻に基づいて、時刻の差に信号の速度vを乗じることによって算出してもよい。比の値d2/d1のアークコサインにより、基準線REFと伝達経路(POT:path of travel)とがなす角度を算出する。
【0040】
2次元での方向を明確に示すためには、実際の伝達経路(POT)と、REFについての反射伝達経路(R−POT)を区別するための第3のソナーS3が必要となる。当業者は、反射伝達経路(R−POT)に対応する線に沿って伝達する信号は、ソナーS1とS2とで、同じ到達時間の差を生み出すだろうことを正しく理解するだろう。第3のソナーによって、ナビゲーション支援装置10が実際の伝達経路(POT)とその反射(R−POT)とを区別できる。ソナーS3は、ソナーS1とソナーS2とを結ぶ基準線REF上から外れた位置にある。3次元での方向を測定するためには、少なくとも4個のソナー送受波器62が必要であり、そのうちの1個はその他3個を通る平面の外になければならない。
【0041】
図8は障害に遮られている目標物への距離と方向とを測定する方法を説明したものである。図8は2人のダイバーとダイブ・ボートとの位置を示した俯瞰図である。ダイバー・ユニット1はダイブ・ボートに対して開けた視界を有するが、ダイバー・ユニット2のダイブ・ボートへの視界はさんご礁や陸の塊で遮られている。ダイバー・ユニット2はダイブ・ボートへの距離と方向とを獲得したいが、ダイブ・ボートと直接に通信することはできない。この状況では、ダイバー・ユニット2は、ロケーション支援要求メッセージを送信することで、ダイバー・ユニット1にナビゲーション支援を要求することができる。ダイバー・ユニット1はREF1に対するダイブ・ボートへの距離と方向とを算出できる。さらに、ダイバー・ユニット1はREF1に対するダイバー・ユニット2への距離と方向とを算出できる。従って、基準三角形Tのうち、距離a、bと角度Cはダイバー1に既知である。余弦定理を使って、ダイバー・ユニット1はダイバー・ユニット2とダイブ・ボートとの距離cを算出できる。ひとたび距離cが既知となれば、ダイバー・ユニット1は正弦定理を使って、ダイバー・ユニット1の現在地点とダイバー・ユニット2の現在地点とを結んだ第1の直線と、ダイバー・ユニット2の現在地点とダイブ・ボートの現在地点とを結んだ第2の直線との挟角Aを算出できる。その後、ダイバー・ユニット1は、ダイバー・ユニット2の現在地点からダイブ・ボートへの距離cと、ダイバー・ユニット2との挟角とを送信できる。ダイバー・ユニット2は自己の基準線REF2に対する基準三角形Tの直線b、cの方向を知らないため、ダイバー・ユニット2にとって挟角Aが方向を示さないのが問題となる。
【0042】
ダイブ・ボートへの方向を測定するために、ダイバー・ユニット2は、直線cと自己の角度基準REF2とを関連付ける必要がある。ダイブ・ボートとREF2との方向を関連付けるために、ダイバー・ユニット2はREF2に対するダイバー・ユニット1の方向を算出できる。挟角Aは、ダイバー・ユニット1の現在地点とダイバー・ユニット2の現在地点とを結ぶ直線を基準としているため、REF2に対するダイブ・ボートの方向を測定するために、ダイバー・ユニット2は、ダイバー・ユニット1の方向に挟角Aを加えることでダイブ・ボートの方向を算出できる。
【0043】
以下は図8に基づいた実施例である。単純のために、計算は2次元だけを考慮する。当業者はこの方法を容易に3次元に拡張できる。
【0044】
この例では、ダイバー・ユニット2は、ダイバー1にロケーション支援要求メッセージを送信することで、ダイバー1からのナビゲーション支援を要求したところである。ダイバー・ユニット1は、ダイブ・ボートへの自己の距離と方向とを測定する。ダイブ・ボートへの方向は、ダイバー・ユニット1の自己の角度基準REF1に対して測定される。この例では、方向はREF1に対して216度で、距離は約65.75mである。次に、ダイバー・ユニット1は、ダイバー・ユニット2への距離(約52.20m)と方向(REF1に対して約298度)を測定する。ダイバー・ユニット1は基準三角形Tの挟角Cを算出して、約82度とわかる。現時点で、ダイバー・ユニット1は基準三角形Tの距離a、bと挟角Cとを知る。そこで、ダイバー・ユニット1は、余弦定理(式1)によって、ダイバー・ユニット2からダイブ・ボートへの距離cを算出できる。
c2=a2+b2−2abcosC (式1)
ダイバー・ユニット2からダイブ・ボートへの距離cを算出した結果、約78mである。挟角Aは正弦定理(式2)によって算出できる。
a/sinA=b/sinB=c/sinC (式2)
挟角Aは算出された結果、約56.6度である。ダイバー・ユニット1は距離c(78.1m)と挟角A(56.6度)とをダイバー・ユニット2に送信する。挟角Aに自身からダイバー・ユニット1への方向を加えることで、ダイバー・ユニット2はダイブ・ボートの基準REF2に対する方向を算出でき、その結果は約255度である。別の実施態様では、ダイバー・ユニット2は、2個のユニットを結ぶ直線のREF2に対する角度をダイバー・ユニット1に送信することもできるだろう。この場合、ダイバー・ユニット1は、ダイバー・ユニット2の自己の内部基準に対するダイブ・ボートへのダイバー・ユニット2の方向を算出できるだろう。
【0045】
上記で与えられた例では、ダイバー・ユニット1がダイバー・ユニット2からダイブ・ボートへの距離cと基準三角形Tの挟角Aとを算出して、その結果をダイバー・ユニット2に送信する。その代わりに、ダイバー・ユニット1がダイバー・ユニット1からダイブ・ボートへの距離aと基準三角形Tの挟角Cとをダイバー・ユニット2に送信して、ダイバー・ユニット2が上述したその後のすべての計算を実行することができるだろう。この場合、ダイバー・ユニット2は前述の距離測定技術のいずれか使用してもダイバー・ユニット1との距離を算出できるだろう。距離a、bと挟角Aとを知っている。その結果、ダイバー・ユニット2はダイブ・ボートへの距離cと挟角Aを算出できるだろう。基準REF2に対するダイブ・ボートへの方向を算出するための残りの計算は、前述したものと同じである。
【0046】
図9は障害に遮られた目標物への距離と方向とを獲得する好適な手続きを説明するものである。ダイバー1は、目標物への距離と方向との算出の支援を要求するために、ダイバー2にロケーション支援要求メッセージを送信する(ステップa)。ロケーション支援要求メッセージの応答として、ダイバー2はピング・メッセージを目標物に送信する(ステップb)。その応答として、目標物はピング応答メッセージをダイバー2に送信する(ステップc)。つぎに、ダイバー2はピング・メッセージをダイバー1に送信して(ステップd)、その応答として、ダイバー1はピング応答メッセージをダイバー2に送信する(ステップe)。距離がすでに既知の場合には、ステップ(b)、(c)、(d)及び(e)を省略できる。この時点でダイバー2は、ダイバー1から目標物への距離と方向とを算出するために必要な情報をすべて取得している。ダイバー2は、ダイバー1から目標物への距離と方向とを算出して、ロケーション支援応答メッセージでその情報をダイバー1に送信する。
【0047】
当然のことながら、本発明の範囲と本質的な特徴とを逸脱することなしに、ここで説明した方法とは異なる特定の方法で本発明を実行できるだろう。従って、本実施態様は、すべての観点で例示的であり、非制限的であると考えられるべきで、添付の特許請求の範囲の意味と均等な範囲とに付随するすべての変形はそこに包含されることを意図している。
【0048】
補遺A
【図面の簡単な説明】
【0049】
【図1】本発明に係る通信システムの一例を説明したものである。
【図2】本発明の好適な一実施態様に係るダイバー・ユニットの一例を説明したものである。
【図3】ダイバー・ユニットの主な構成要素を説明した機能ブロック図の一例である。
【図4】水中での通信のための好適な時分割多元接続方式の一例を説明したものである。
【図5】水中での通信のための好適なメッセージ書式の一例を説明したものである。
【図6】水中での通信のための好適な変調の一例を説明したものである。
【図7】目標物への方向を測定する方法の一例を説明したものである。
【図8】障害に遮られたダイバーが目標物への距離と方向を測定する技術の一例を説明した俯瞰図である。
【図9】障害に遮られたダイバーが目標物への距離と方向とを測定する好適な手続きの一例を説明したフローチャートである。
【特許請求の範囲】
【請求項1】
水中でのナビゲーション方法であって、
第1の水中装置が、該第1の水中装置に既知である第1の角度基準に対する目標物への方向を測定する工程と、
前記第1の水中装置、第2の水中装置、及び前記目標物を頂点とする基準三角形の辺を形成する、前記第1の水中装置と前記第2の水中装置とを結ぶ基準線を設定する工程と、
前記第1の水中装置が、該第1の水中装置から前記目標物への方向に基づき前記基準線と前記第1の水中装置から前記目標物へ引いた線とに挟まれる前記基準三角形の第1の挟角を算出する工程と、
前記第1の水中装置が、該第1の水中装置と前記目標物との間の第1の距離を測定する工程と、
前記第1の水中装置が、該第1の水中装置と前記第2の水中装置との間の第2の距離を測定する工程と、
前記第1の水中装置が、前記第1の挟角、前記第1の距離、及び前記第2の距離に基づいて、前記第2の水中装置から前記目標物への第3の距離を算出する工程と、
前記第2の水中装置が前記目標物の位置を探知することを支援するために、前記第3の距離を該第2の水中装置に送信する工程と
を備えることを特徴とする水中でのナビゲーション方法。
【請求項2】
前記第1の水中装置が、前記第2の水中装置から前記目標物への方向を算出する工程と、
前記第2の水中装置から前記目標物への方向を前記第1の水中装置から該第2の水中装置へ送信する工程と
をさらに備えることを特徴とする請求項1に記載の方法。
【請求項3】
前記第2の水中装置から前記目標物への方向は、前記第1の水中装置と該第2の水中装置とを結ぶ前記基準線に対して算出されることを特徴とする請求項2に記載の方法。
【請求項4】
前記第2の水中装置から前記目標物への方向は、該第2の水中装置によって前記第1の水中装置に与えられる角度基準に対して算出されることを特徴とする請求項2に記載の方法。
【請求項5】
前記第1の水中装置が、前記基準線と前記第2の水中装置から前記目標物へ引いた線とに挟まれる前記基準三角形の第2の挟角を算出する工程と、
前記第2の挟角を前記第2の水中装置に送信する工程と
をさらに備えることを特徴とする請求項1に記載の方法。
【請求項6】
前記第2の水中装置が、前記第2の挟角と該第2の水中装置から前記第1の水中装置への方向とに基づいて、該第2の水中装置に既知である第2の角度基準に対する前記目標物への方向を算出する工程をさらに備えることを特徴とする請求項5に記載の方法。
【請求項7】
前記基準線と前記第1の水中装置が方向の算出において基準とする前記第2の水中装置に使用される角度基準との間の角度を、該第2の水中装置が該第1の水中装置に送信する工程をさらに備えることを特徴とする請求項6に記載の方法。
【請求項8】
前記第1の挟角を前記第2の水中装置に送信する工程をさらに含むことを特徴とする請求項1に記載の方法。
【請求項9】
前記第2の水中装置が、前記基準線と該第2の水中装置から前記目標物へ引いた線との間の第2の挟角を算出する工程をさらに含むことを特徴とする請求項8に記載の方法。
【請求項10】
前記第2の水中装置が、前記第2の挟角と該第2の水中装置から前記第1の水中装置への方向とに基づいて、該第2の水中装置に既知である角度基準に対する前記目標物の方向を算出する工程をさらに備えることを特徴とする請求項9に記載の方法。
【請求項11】
第1の挟角を算出する工程が、
前記第1の水中装置から前記第2の水中装置への方向を算出する工程と、
前記第1の挟角を算出するために、前記目標物への方向と前記第2の水中装置への方向とを使用する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項12】
距離を測定する工程が、
信号を受信する工程と、
前記信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項13】
距離を測定する工程が、
信号を送信する工程と、
応答信号を受信する工程と、
前記応答信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項14】
前記目標物への距離を測定する工程が、
前記目標物から二重トーン信号を受信する工程と、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号の強度の差に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項15】
水中でのナビゲーション方法であって、
第1の水中装置が、該第1の水中装置に既知である第1の角度基準に対する目標物への方向を測定する工程と、
前記第1の水中装置、第2の水中装置、及び前記目標物を頂点とする基準三角形の辺を形成する、前記第1の水中装置と前記第2の水中装置とを結ぶ基準線を設定する工程と、
前記第1の水中装置が、該第1の水中装置から前記目標物への方向に基づいて、前記基準線と前記第1の水中装置から前記目標物へ引いた線とに挟まれる前記基準三角形の第1の挟角を算出する工程と、
前記第1の水中装置が、該第1の水中装置と前記目標物との間の第1の距離を測定する工程と、
前記第2の水中装置が前記目標物の位置を探知することを支援するために、前記第1の挟角と前記第1の距離とを該第2の水中装置に送信する工程と
を備えることを特徴とする水中でのナビゲーション方法。
【請求項16】
前記第2の水中装置が、前記第1の水中装置と該第2の水中装置との間の第2の距離を測定する工程と、
前記第2の水中装置が、前記第1の挟角、前記第1の距離、及び前記第2の距離に基づいて、前記目標物への第3の距離を算出する工程と
をさらに備えることを特徴とする請求項15に記載の方法。
【請求項17】
前記第2の水中装置が、前記第1の挟角、前記第1の距離、及び前記第3の距離に基づいて、該第2の水中装置から前記目標物への方向を算出する工程をさらに備えることを特徴とする請求項16に記載の方法。
【請求項18】
距離を測定する工程が、
信号を受信する工程と、
前記信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項15に記載の方法。
【請求項19】
距離を測定する工程が、
信号を送信する工程と、
応答信号を受信する工程と、
前記応答信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項15に記載の方法。
【請求項20】
前記目標物への距離を測定する工程が、
二重トーン信号を受信する工程と、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号の強度の差に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項21】
水中でのナビゲーション支援装置であって、
水中で信号を送信及び受信するソナー送受信器と、
前記ソナー送受信器と協働する処理回路であって、
目標物からの受信信号に基づいて、現在地点から前記目標物への方向を測定し、
前記現在地点、遠隔の水中装置に関連する遠隔地点、及び目標地点を頂点とする基準三角形の辺を形成する、前記現在地点と前記遠隔地点とを結ぶ基準線を設定し、
前記基準線と、前記現在地点と前記目標地点との間の線と、に挟まれる前記基準三角形の第1の挟角を算出し、
前記現在地点と前記目標地点との間の第1の距離を測定し、
前記現在地点と前記遠隔地点との間の第2の距離を測定し、
前記第1の挟角、前記第1の距離、及び前記第2の距離に基づいて、前記遠隔地点から前記目標地点への第3の距離を算出し、
前記遠隔の水中装置が前記目標の位置を探知することを支援するために、前記第3の距離を前記遠隔の水中装置に送信するように前記ソナー送受信器を制御する
ように機能する処理回路と
を備えることを特徴とする水中でのナビゲーション支援装置。
【請求項22】
前記処理回路は、
前記遠隔の水中装置から前記目標物への方向を算出し、
前記遠隔の水中装置への方向を送信するように送信機を制御する
ことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項23】
前記遠隔地点から前記目標物への距離は、前記現在地点と前記遠隔地点とを結ぶ前記基準線に対して算出されることを特徴とする請求項22に記載のナビゲーション支援装置。
【請求項24】
前記遠隔の水中装置から前記目標物への方向は、前記遠隔の水中装置によって、前記第1の角度基準に対して算出されることを特徴とする請求項22に記載のナビゲーション支援装置。
【請求項25】
前記処理回路はさらに、
前記基準線と前記現在地点から前記目標物へ引いた線とに挟まれる第2の挟角を算出し、
前記遠隔の水中装置に前記第2の挟角を送信するように前記送受信器を制御する
ように機能することを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項26】
前記処理回路はさらに、前記第1の挟角を前記遠隔の水中装置に送信するようにソナー送受信器を制御することを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項27】
前記処理回路は、前記目標物への方向と前記遠隔の水中装置への方向とに基づいて、前記第1の挟角を算出することを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項28】
前記処理回路は、
信号を受信し、
前記信号の到達時刻に基づいて前記距離を算出する
ことにより距離の測定を行うことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項29】
前記処理回路は、
信号を送信し、
応答信号を受信し、
前記応答信号の到達時刻に基づいて前記距離を算出する
ことにより距離の測定を行うことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項30】
前記処理回路は、
二重トーン信号を受信し、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号強度の差に基づいて前記距離を算出する
ことにより距離の測定を行うことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項31】
水中でのナビゲーション支援装置であって、
水中で信号を送信及び受信するソナー送受信器と、
前記ソナー送受信器と協働する処理回路であって、
前記ナビゲーション支援に既知である第1の基準線に対する現在地点から目標物への方向を測定し、
前記現在地点、遠隔の水中装置に関連する遠隔地点、及び目標地点を頂点とする基準三角形の辺を形成する、前記現在地点と前記遠隔地点と結ぶ基準線を設定し、
前記現在地点から前記目標物への方向に基づいて、前記基準線と、前記現在地点と前記目標地点とを結んだ線と、に挟まれる前記基準三角形の第1の挟角を算出し、
前記現在地点と前記目標地点との間の第1の距離を測定し、
前記遠隔の水中装置が前記目標物の位置を探知することを支援するために、前記第1の挟角と前記第1の距離とを前記遠隔の水中装置に送信するように前記ソナー送受信器を制御する
ように機能する処理回路と
を備えることを特徴とする水中でのナビゲーション支援装置。
【請求項32】
前記処理回路は、
前記目標物から信号を受信し、
前記信号の到達時刻に基づいて前記距離を算出する
ことにより前記目標物への距離の測定を行うことを特徴とする請求項31に記載のナビゲーション支援装置。
【請求項33】
前記処理回路は、
前記目標物へ信号を送信し、
前記目標物から応答信号を受信し、
前記応答信号の到達時刻に基づいて前記距離を算出する
ことにより前記目標物への距離の測定を行うことを特徴とする請求項31に記載のナビゲーション支援装置。
【請求項34】
前記処理回路は、
前記目標物から二重トーン信号を受信し、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号強度の差に基づいて前記距離を算出する
ことにより前記目標物への距離の測定を行うことを特徴とする請求項31に記載のナビゲーション支援装置。
【請求項35】
水中でのナビゲーション支援装置であって、
第1の水中装置から目標物への第1の距離と、前記第1の水中装置に関連した第1の地点から現在地点へ引いた基準線に対する方向である第1の方向と、を受信するソナー送受信器と、
前記ソナー送受信器と協働する処理回路であって、
前記現在地点から前記第1の地点への第2の距離を測定し、
前記第1の距離、前記第2の距離、及び前記第1の方向に基づいて、前記現在地点から前記目標物への第3の距離を算出し、
前記第1の方向、前記第1の距離、及び前記第3の距離に基づいて、前記現在地点から前記目標への第2の方向を算出する
ように機能する処理回路と
を備えることを特徴とする水中でのナビゲーション支援装置。
【請求項1】
水中でのナビゲーション方法であって、
第1の水中装置が、該第1の水中装置に既知である第1の角度基準に対する目標物への方向を測定する工程と、
前記第1の水中装置、第2の水中装置、及び前記目標物を頂点とする基準三角形の辺を形成する、前記第1の水中装置と前記第2の水中装置とを結ぶ基準線を設定する工程と、
前記第1の水中装置が、該第1の水中装置から前記目標物への方向に基づき前記基準線と前記第1の水中装置から前記目標物へ引いた線とに挟まれる前記基準三角形の第1の挟角を算出する工程と、
前記第1の水中装置が、該第1の水中装置と前記目標物との間の第1の距離を測定する工程と、
前記第1の水中装置が、該第1の水中装置と前記第2の水中装置との間の第2の距離を測定する工程と、
前記第1の水中装置が、前記第1の挟角、前記第1の距離、及び前記第2の距離に基づいて、前記第2の水中装置から前記目標物への第3の距離を算出する工程と、
前記第2の水中装置が前記目標物の位置を探知することを支援するために、前記第3の距離を該第2の水中装置に送信する工程と
を備えることを特徴とする水中でのナビゲーション方法。
【請求項2】
前記第1の水中装置が、前記第2の水中装置から前記目標物への方向を算出する工程と、
前記第2の水中装置から前記目標物への方向を前記第1の水中装置から該第2の水中装置へ送信する工程と
をさらに備えることを特徴とする請求項1に記載の方法。
【請求項3】
前記第2の水中装置から前記目標物への方向は、前記第1の水中装置と該第2の水中装置とを結ぶ前記基準線に対して算出されることを特徴とする請求項2に記載の方法。
【請求項4】
前記第2の水中装置から前記目標物への方向は、該第2の水中装置によって前記第1の水中装置に与えられる角度基準に対して算出されることを特徴とする請求項2に記載の方法。
【請求項5】
前記第1の水中装置が、前記基準線と前記第2の水中装置から前記目標物へ引いた線とに挟まれる前記基準三角形の第2の挟角を算出する工程と、
前記第2の挟角を前記第2の水中装置に送信する工程と
をさらに備えることを特徴とする請求項1に記載の方法。
【請求項6】
前記第2の水中装置が、前記第2の挟角と該第2の水中装置から前記第1の水中装置への方向とに基づいて、該第2の水中装置に既知である第2の角度基準に対する前記目標物への方向を算出する工程をさらに備えることを特徴とする請求項5に記載の方法。
【請求項7】
前記基準線と前記第1の水中装置が方向の算出において基準とする前記第2の水中装置に使用される角度基準との間の角度を、該第2の水中装置が該第1の水中装置に送信する工程をさらに備えることを特徴とする請求項6に記載の方法。
【請求項8】
前記第1の挟角を前記第2の水中装置に送信する工程をさらに含むことを特徴とする請求項1に記載の方法。
【請求項9】
前記第2の水中装置が、前記基準線と該第2の水中装置から前記目標物へ引いた線との間の第2の挟角を算出する工程をさらに含むことを特徴とする請求項8に記載の方法。
【請求項10】
前記第2の水中装置が、前記第2の挟角と該第2の水中装置から前記第1の水中装置への方向とに基づいて、該第2の水中装置に既知である角度基準に対する前記目標物の方向を算出する工程をさらに備えることを特徴とする請求項9に記載の方法。
【請求項11】
第1の挟角を算出する工程が、
前記第1の水中装置から前記第2の水中装置への方向を算出する工程と、
前記第1の挟角を算出するために、前記目標物への方向と前記第2の水中装置への方向とを使用する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項12】
距離を測定する工程が、
信号を受信する工程と、
前記信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項13】
距離を測定する工程が、
信号を送信する工程と、
応答信号を受信する工程と、
前記応答信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項14】
前記目標物への距離を測定する工程が、
前記目標物から二重トーン信号を受信する工程と、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号の強度の差に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項15】
水中でのナビゲーション方法であって、
第1の水中装置が、該第1の水中装置に既知である第1の角度基準に対する目標物への方向を測定する工程と、
前記第1の水中装置、第2の水中装置、及び前記目標物を頂点とする基準三角形の辺を形成する、前記第1の水中装置と前記第2の水中装置とを結ぶ基準線を設定する工程と、
前記第1の水中装置が、該第1の水中装置から前記目標物への方向に基づいて、前記基準線と前記第1の水中装置から前記目標物へ引いた線とに挟まれる前記基準三角形の第1の挟角を算出する工程と、
前記第1の水中装置が、該第1の水中装置と前記目標物との間の第1の距離を測定する工程と、
前記第2の水中装置が前記目標物の位置を探知することを支援するために、前記第1の挟角と前記第1の距離とを該第2の水中装置に送信する工程と
を備えることを特徴とする水中でのナビゲーション方法。
【請求項16】
前記第2の水中装置が、前記第1の水中装置と該第2の水中装置との間の第2の距離を測定する工程と、
前記第2の水中装置が、前記第1の挟角、前記第1の距離、及び前記第2の距離に基づいて、前記目標物への第3の距離を算出する工程と
をさらに備えることを特徴とする請求項15に記載の方法。
【請求項17】
前記第2の水中装置が、前記第1の挟角、前記第1の距離、及び前記第3の距離に基づいて、該第2の水中装置から前記目標物への方向を算出する工程をさらに備えることを特徴とする請求項16に記載の方法。
【請求項18】
距離を測定する工程が、
信号を受信する工程と、
前記信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項15に記載の方法。
【請求項19】
距離を測定する工程が、
信号を送信する工程と、
応答信号を受信する工程と、
前記応答信号の到着時刻に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項15に記載の方法。
【請求項20】
前記目標物への距離を測定する工程が、
二重トーン信号を受信する工程と、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号の強度の差に基づいて前記距離を算出する工程と
を含むことを特徴とする請求項1に記載の方法。
【請求項21】
水中でのナビゲーション支援装置であって、
水中で信号を送信及び受信するソナー送受信器と、
前記ソナー送受信器と協働する処理回路であって、
目標物からの受信信号に基づいて、現在地点から前記目標物への方向を測定し、
前記現在地点、遠隔の水中装置に関連する遠隔地点、及び目標地点を頂点とする基準三角形の辺を形成する、前記現在地点と前記遠隔地点とを結ぶ基準線を設定し、
前記基準線と、前記現在地点と前記目標地点との間の線と、に挟まれる前記基準三角形の第1の挟角を算出し、
前記現在地点と前記目標地点との間の第1の距離を測定し、
前記現在地点と前記遠隔地点との間の第2の距離を測定し、
前記第1の挟角、前記第1の距離、及び前記第2の距離に基づいて、前記遠隔地点から前記目標地点への第3の距離を算出し、
前記遠隔の水中装置が前記目標の位置を探知することを支援するために、前記第3の距離を前記遠隔の水中装置に送信するように前記ソナー送受信器を制御する
ように機能する処理回路と
を備えることを特徴とする水中でのナビゲーション支援装置。
【請求項22】
前記処理回路は、
前記遠隔の水中装置から前記目標物への方向を算出し、
前記遠隔の水中装置への方向を送信するように送信機を制御する
ことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項23】
前記遠隔地点から前記目標物への距離は、前記現在地点と前記遠隔地点とを結ぶ前記基準線に対して算出されることを特徴とする請求項22に記載のナビゲーション支援装置。
【請求項24】
前記遠隔の水中装置から前記目標物への方向は、前記遠隔の水中装置によって、前記第1の角度基準に対して算出されることを特徴とする請求項22に記載のナビゲーション支援装置。
【請求項25】
前記処理回路はさらに、
前記基準線と前記現在地点から前記目標物へ引いた線とに挟まれる第2の挟角を算出し、
前記遠隔の水中装置に前記第2の挟角を送信するように前記送受信器を制御する
ように機能することを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項26】
前記処理回路はさらに、前記第1の挟角を前記遠隔の水中装置に送信するようにソナー送受信器を制御することを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項27】
前記処理回路は、前記目標物への方向と前記遠隔の水中装置への方向とに基づいて、前記第1の挟角を算出することを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項28】
前記処理回路は、
信号を受信し、
前記信号の到達時刻に基づいて前記距離を算出する
ことにより距離の測定を行うことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項29】
前記処理回路は、
信号を送信し、
応答信号を受信し、
前記応答信号の到達時刻に基づいて前記距離を算出する
ことにより距離の測定を行うことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項30】
前記処理回路は、
二重トーン信号を受信し、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号強度の差に基づいて前記距離を算出する
ことにより距離の測定を行うことを特徴とする請求項21に記載のナビゲーション支援装置。
【請求項31】
水中でのナビゲーション支援装置であって、
水中で信号を送信及び受信するソナー送受信器と、
前記ソナー送受信器と協働する処理回路であって、
前記ナビゲーション支援に既知である第1の基準線に対する現在地点から目標物への方向を測定し、
前記現在地点、遠隔の水中装置に関連する遠隔地点、及び目標地点を頂点とする基準三角形の辺を形成する、前記現在地点と前記遠隔地点と結ぶ基準線を設定し、
前記現在地点から前記目標物への方向に基づいて、前記基準線と、前記現在地点と前記目標地点とを結んだ線と、に挟まれる前記基準三角形の第1の挟角を算出し、
前記現在地点と前記目標地点との間の第1の距離を測定し、
前記遠隔の水中装置が前記目標物の位置を探知することを支援するために、前記第1の挟角と前記第1の距離とを前記遠隔の水中装置に送信するように前記ソナー送受信器を制御する
ように機能する処理回路と
を備えることを特徴とする水中でのナビゲーション支援装置。
【請求項32】
前記処理回路は、
前記目標物から信号を受信し、
前記信号の到達時刻に基づいて前記距離を算出する
ことにより前記目標物への距離の測定を行うことを特徴とする請求項31に記載のナビゲーション支援装置。
【請求項33】
前記処理回路は、
前記目標物へ信号を送信し、
前記目標物から応答信号を受信し、
前記応答信号の到達時刻に基づいて前記距離を算出する
ことにより前記目標物への距離の測定を行うことを特徴とする請求項31に記載のナビゲーション支援装置。
【請求項34】
前記処理回路は、
前記目標物から二重トーン信号を受信し、
前記二重トーン信号の第1のトーンと第2のトーンとの間の信号強度の差に基づいて前記距離を算出する
ことにより前記目標物への距離の測定を行うことを特徴とする請求項31に記載のナビゲーション支援装置。
【請求項35】
水中でのナビゲーション支援装置であって、
第1の水中装置から目標物への第1の距離と、前記第1の水中装置に関連した第1の地点から現在地点へ引いた基準線に対する方向である第1の方向と、を受信するソナー送受信器と、
前記ソナー送受信器と協働する処理回路であって、
前記現在地点から前記第1の地点への第2の距離を測定し、
前記第1の距離、前記第2の距離、及び前記第1の方向に基づいて、前記現在地点から前記目標物への第3の距離を算出し、
前記第1の方向、前記第1の距離、及び前記第3の距離に基づいて、前記現在地点から前記目標への第2の方向を算出する
ように機能する処理回路と
を備えることを特徴とする水中でのナビゲーション支援装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2008−547024(P2008−547024A)
【公表日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願番号】特願2008−518366(P2008−518366)
【出願日】平成18年6月22日(2006.6.22)
【国際出願番号】PCT/US2006/024234
【国際公開番号】WO2007/002246
【国際公開日】平成19年1月4日(2007.1.4)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(507416311)
【氏名又は名称原語表記】BASILICO, Albert, R.
【住所又は居所原語表記】14025 Bingham Drive, Raliegh, North Carolina 27614 U.S.A.
【Fターム(参考)】
【公表日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願日】平成18年6月22日(2006.6.22)
【国際出願番号】PCT/US2006/024234
【国際公開番号】WO2007/002246
【国際公開日】平成19年1月4日(2007.1.4)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(507416311)
【氏名又は名称原語表記】BASILICO, Albert, R.
【住所又は居所原語表記】14025 Bingham Drive, Raliegh, North Carolina 27614 U.S.A.
【Fターム(参考)】
[ Back to top ]