
ダイ突き上げ動作管理システム
【課題】ダイ供給装置の突き上げポットと突き上げピンの突き上げ高さ位置や突き上げピンのXY方向の位置を自動的に計測できるようにする。
【解決手段】突き上げ高さ検出時に突き上げユニット18の上方にウエハパレットをセットせずに突き上げ動作を行って、突き上げポット27を上昇させて該突き上げポット27の上面から突き上げピンを突出させた状態で、ダイ供給装置のカメラをX方向のプリズム35の上方に移動させて突き上げポット27と突き上げピンのX方向の側面を該プリズム35を介して該カメラで撮像すると共に、該カメラをY方向のプリズム36の上方に移動させて突き上げポット27と突き上げピンのY方向の側面を該プリズム36を介して該カメラで撮像し、撮像した突き上げポット27と突き上げピン29の側面画像を画像処理して突き上げ動作時の突き上げポット27の上面の高さ位置と突き上げピン29の上端の高さ位置を検出する。
【解決手段】突き上げ高さ検出時に突き上げユニット18の上方にウエハパレットをセットせずに突き上げ動作を行って、突き上げポット27を上昇させて該突き上げポット27の上面から突き上げピンを突出させた状態で、ダイ供給装置のカメラをX方向のプリズム35の上方に移動させて突き上げポット27と突き上げピンのX方向の側面を該プリズム35を介して該カメラで撮像すると共に、該カメラをY方向のプリズム36の上方に移動させて突き上げポット27と突き上げピンのY方向の側面を該プリズム36を介して該カメラで撮像し、撮像した突き上げポット27と突き上げピン29の側面画像を画像処理して突き上げ動作時の突き上げポット27の上面の高さ位置と突き上げピン29の上端の高さ位置を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットを備えたダイ供給装置におけるダイ突き上げ動作を管理するダイ突き上げ動作管理システムに関する発明である。
【背景技術】
【0002】
近年、特許文献1(特開2010−129949号公報)に記載されているように、ダイを供給するダイ供給装置を部品実装機にセットして、部品実装機でダイを回路基板に実装するようにしたものがある。ダイ供給装置は、複数のダイに分割するようにダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットと、前記ダイシングシートの下方に配置された突き上げポットとを備え、吸着ノズルを下降させて前記ダイシングシート上のダイを吸着してピックアップする際に、突き上げポットをダイシングシートの下面に接触する所定の吸着位置まで上昇させて該ダイシングシートを該突き上げポットの上面に吸着した状態で、該突き上げポット内の突き上げピンを該突き上げポットの上面から上方に突出させることで、該ダイシングシートのうちの吸着しようとするダイの貼着部分を該突き上げピンで突き上げて該ダイの貼着部分を該ダイシングシートから部分的に剥離させながら、該吸着ノズルに該ダイを吸着して該ダイシングシートからピックアップするようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−129949号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、吸着ノズルを下降させてダイシングシート上のダイを吸着する際に、突き上げポット(突き上げピン)の突き上げ高さ位置が高くなり過ぎると、吸着ノズルの下端がダイシングシート上のダイに強く当たり過ぎてダイが傷付いたり、割れてしまう可能性があり、反対に、突き上げポット(突き上げピン)の突き上げ高さ位置が低くなり過ぎると、吸着ノズルにダイを安定して吸着できない。従って、吸着ノズルにダイを傷付けずに安定して吸着するためには、突き上げポット(突き上げピン)の突き上げ高さ位置を厳重に管理する必要がある。また、微小なダイを突き上げピンで突き上げる場合は、突き上げピンの水平方向(XY方向)の位置も厳重に管理する必要がある。
【0005】
しかし、突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置は、突き上げユニットの各部品の組付精度や突き上げピンの取り付け具合に影響され、要求される位置精度を確保するのが難しい。そのため、生産開始前に、突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置を計測して、それらの位置ずれ量が許容範囲を越えていることが判明すれば、部品を組み付け直すなどして再び計測するという作業が必要となるが、その際、作業者が突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置を手作業で計測するようにしていたため、多くの時間を費やすことがあった。
【0006】
そこで、本発明が解決しようとする課題は、突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置を自動的に計測する機能を備えたダイ突き上げ動作管理システムを提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、請求項1に係る発明は、複数のダイに分割するようにダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットと、前記ダイシングシートの下方に配置された突き上げポットを上下動させる突き上げ機構とを備え、吸着ノズルを下降させて前記ダイシングシート上のダイを吸着してピックアップする際に、前記突き上げポットを上昇させて該突き上げポットの上面に前記ダイシングシートを吸着した状態で、該突き上げポット内の突き上げピンを該突き上げポットの上面から上方に突出させることで、該ダイシングシートのうちの吸着しようとするダイの貼着部分を該突き上げピンで突き上げて該ダイの貼着部分を該ダイシングシートから部分的に剥離させながら、該吸着ノズルに該ダイを吸着して該ダイシングシートからピックアップするダイ供給装置に適用され、撮像対象物を上方から撮像するカメラと、前記カメラを移動させるカメラ移動機構と、前記カメラで撮像した画像を処理する画像処理手段と、突き上げ高さ検出時に前記突き上げポットの上方に前記ウエハパレットをセットせずに突き上げ動作を行って該突き上げポットを上昇させた状態で該突き上げポットの側面を撮像するために該突き上げポットの側方に配置された光軸方向転換手段(プリズム、ミラー等)とを備え、前記突き上げ高さ検出時に前記カメラ移動機構により前記カメラを前記光軸方向転換手段の上方に移動させて前記突き上げポットの側面を該光軸方向転換手段を介して該カメラで撮像し、撮像した該突き上げポットの側面画像を前記画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置を検出するようにしたものである。
【0008】
この構成によれば、突き上げ動作時の突き上げポットの側面を光軸方向転換手段を介してカメラで撮像し、撮像した突き上げポットの側面画像を画像処理して突き上げポットの突き上げ高さ位置を検出する機能を備えているため、突き上げポットの突き上げ高さ位置を自動的に計測することができる。しかも、突き上げ高さ検出に用いるカメラは、ダイシングシート上のダイを撮像するカメラ等、突き上げ高さ検出以外の用途に使用されていたカメラを兼用できるため、専用のカメラを増設する必要がなく、低コスト化の要求も満たすことができる。
【0009】
本発明は、光軸方向転換手段をウエハパレットのセット(出し入れ)に邪魔にならない位置に固定して設けた構成としても良いが、ダイ供給装置の構造上、ウエハパレットのセットに邪魔にならない位置に光軸方向転換手段を固定して設けることがスペース的に困難な場合がある。
【0010】
そこで、請求項2のように、光軸方向転換手段を上下動させる上下動機構を設け、突き上げ高さ検出時に上下動機構により光軸方向転換手段を突き上げポットの側面を撮像する位置へ上昇させ、突き上げ高さ検出終了後に突き上げポットの上方にウエハパレットをセットする前に、該光軸方向転換手段を該ウエハパレットのセットに邪魔にならない位置へ下降させるようにすると良い。このようにすれば、ウエハパレットのセットに邪魔にならない位置に光軸方向転換手段を固定する構成を採用することがスペース的に困難な構造のダイ供給装置であっても、本発明を実施することができる。
【0011】
また、請求項3のように、突き上げ高さ検出時に突き上げポットの上面から突出した突き上げピンの側面を該突き上げポットの側面と一緒にカメラで撮像し、撮像した該突き上げポットの側面画像及び該突き上げピンの側面画像を画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置及び該突き上げピンの上端の高さ位置を検出するようにしても良い。このようにすれば、突き上げ高さ検出時に突き上げピンの側面画像を用いて突き上げピンの上端の高さ位置を検出することができ、突き上げピンの突き上げ量(突き上げピンの上端の高さ位置と突き上げポットの上面の高さ位置との差分値)も計測することができる。
【0012】
本発明は、突き上げポットや突き上げポットの突き上げ高さを検出するだけであれば、光軸方向転換手段を1個のみ設ければ良いが、突き上げピンのXY方向の位置を検出する機能を付加する場合は、光軸方向転換手段を2個設ける構成とすれば良い。
【0013】
具体的には、請求項4のように、突き上げピンに対してX方向とY方向の位置にそれぞれ光軸方向転換手段を配置し、突き上げ高さ検出時にカメラ移動機構によりカメラをX方向の光軸方向転換手段の上方に移動させて突き上げピンのX方向の側面を撮像すると共に、該カメラをY方向の光軸方向転換手段の上方に移動させて該突き上げピンのY方向の側面を撮像し、撮像した該突き上げピンのX方向の側面画像とY方向の側面画像を画像処理手段により画像処理して該突き上げピンのXY方向の位置を検出するようにしても良い。このようにすれば、X方向とY方向の2つの側面画像を用いて、突き上げピンのXY方向の位置を自動的に計測することができる。
【0014】
また、請求項5のように、突き上げピンの側面画像の画像処理結果に基づいて該突き上げピンの破損、曲りの少なくとも一方の有無を判定するようにしても良い。このようにすれば、突き上げピンの側面画像を用いて、突き上げピンの破損や曲りも自動的に検出することができる。
【図面の簡単な説明】
【0015】
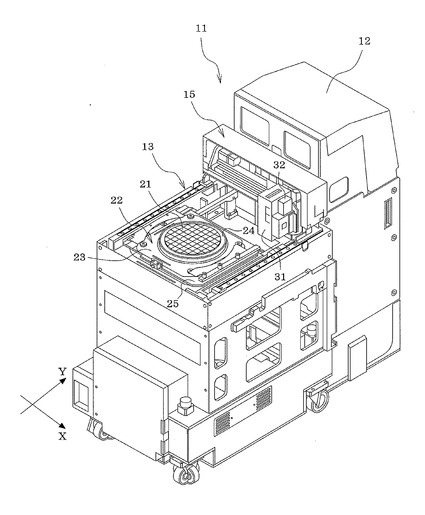
【図1】図1は本発明の実施例1におけるウエハパレットをセットした状態を示す部品供給装置の外観斜視図である。
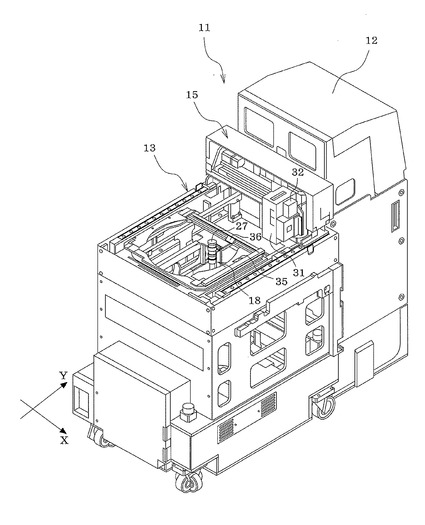
【図2】図2はウエハパレットをセットする前の状態を示す部品供給装置の外観斜視図である。
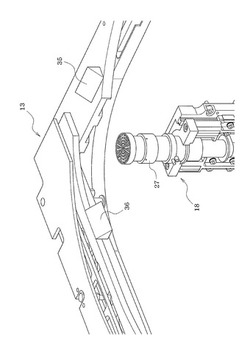
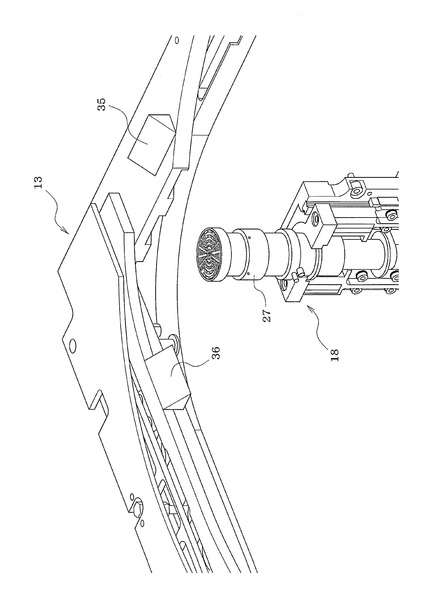
【図3】図3は実施例1の突き上げポットとプリズムとの位置関係を示す外観斜視図である。
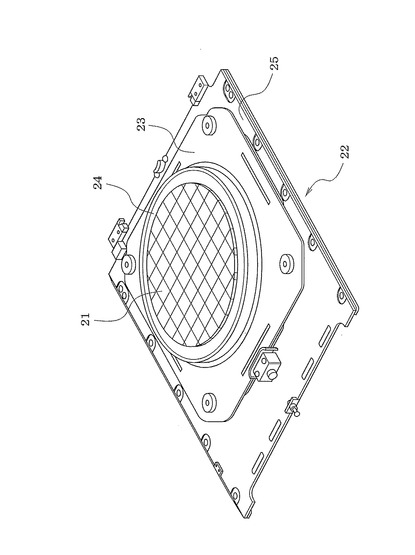
【図4】図4はウエハパレットの外観斜視図である。
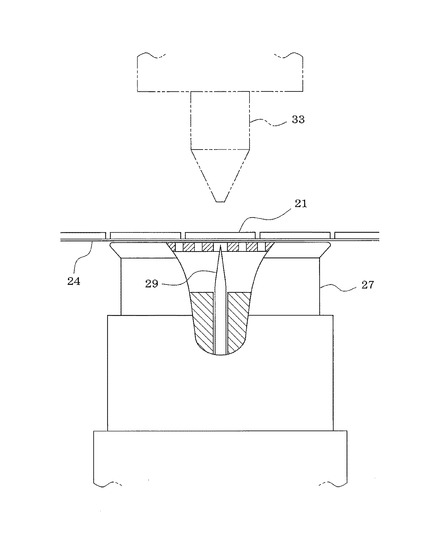
【図5】図5は突き上げ動作時に突き上げポットを吸着位置まで上昇させた状態を示す一部破断拡大図である。
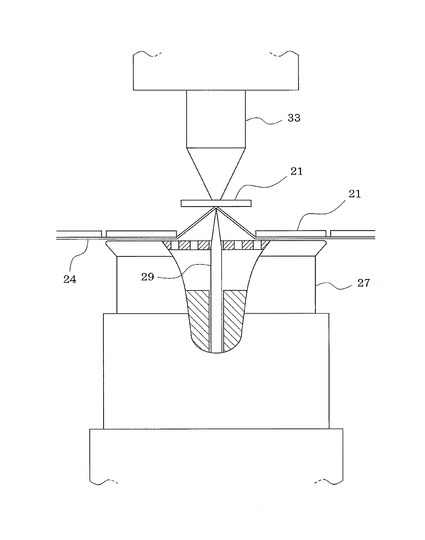
【図6】図6は突き上げ動作時に突き上げポットから突き上げピンを突出させた状態を示す一部破断拡大図である。
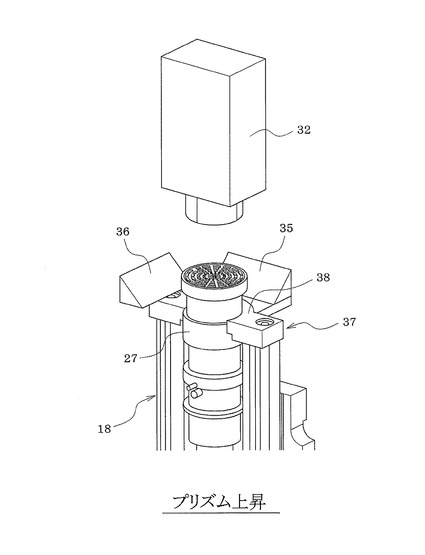
【図7】図7は実施例2におけるプリズムを突き上げポットの側面を撮像する位置へ上昇させた状態を示す斜視図である。
【図8】図8は実施例2におけるウエハパレットのセットに邪魔にならない位置へプリズムを下降させた状態を示す斜視図である。
【発明を実施するための形態】
【0016】
以下、本発明を実施するための形態を具体化した2つの実施例1,2を説明する。
【実施例1】
【0017】
以下、本発明の実施例1を図1乃至図6に基づいて説明する。
まず、部品供給装置11(ダイ供給装置)の構成を概略的に説明する。
図1に示すように、部品供給装置11は、マガジン保持部12(トレイタワー)、パレット引き出しテーブル13、XY移動機構15(カメラ移動機構)、突き上げユニット18(図3参照)等を備え、部品実装機(図示せず)にパレット引き出しテーブル13を差し込んだ状態にセットされる。
【0018】
部品供給装置11のマガジン保持部12内に上下動可能に収納されたマガジン(図示せず)には、ダイ21(ウエハ部品)を載せたウエハパレット22と、トレイ部品を載せたトレイパレット(図示せず)とを多段に混載できるように構成され、部品実装機の稼働中にマガジンからウエハパレット22とトレイパレットのいずれか一方のパレットが選択されてパレット引き出しテーブル13上に引き出されるようになっている。図4に示すように、ウエハパレット22は、ウエハを碁盤目状にダイシングして形成したダイ21を貼着した伸縮可能なダイシングシート24を、円形の開口部を有するウエハ装着板23にエキスパンドした状態で装着し、該ウエハ装着板23をパレット本体25にねじ止め等により取り付けた構成となっている。
【0019】
突き上げユニット18(図3参照)は、ウエハパレット22のダイシングシート24下方の空間領域をXY方向に移動可能に構成されている。そして、ダイシングシート24のうちのピックアップ(吸着)しようとするダイ21の貼着部分をその下方から突き上げポット27の突き上げピン29(図5、図6参照)で局所的に突き上げることで、当該ダイ21の貼着部分をダイシングシート24から部分的に剥離させてダイ21をピックアップしやすい状態に浮き上がらせるようにしている。
【0020】
この突き上げユニット18は、サーボモータ(図示せず)を駆動源として突き上げユニット18全体が上下動するように構成されている。ダイピックアップ動作時には、突き上げユニット18が上昇して突き上げポット27の上面がウエハパレット22のダイシングシート24にほぼ接触する所定のシート吸着位置まで上昇すると、ストッパ機構(図示せず)によって突き上げユニット18の上昇が止まり、更に上昇動作を続けると、突き上げポット27の上面から突き上げピン29(図5、図6参照)が上方に突出して、ダイシングシート24のうちのピックアップしようとするダイ21の貼着部分を突き上げるようになっている。この場合、駆動源となるサーボモータの回転量を調整することで、突き上げピン29の突き上げ高さ位置(突き上げ量)を調整できるようになっている。
【0021】
図1に示すように、XY移動機構15には、吸着ヘッド31とカメラ32とが組み付けられ、該XY移動機構15によって吸着ヘッド31とカメラ32が一体的にXY方向に移動するように構成されている。吸着ヘッド31には、ダイシングシート24上のダイ21を吸着する吸着ノズル33(図5、図6参照)が上下動するように設けられている。カメラ32は、ダイシングシート24上のダイ21を上方から撮像してその撮像画像を画像処理することで、吸着ノズル33で吸着するダイ21の位置を確認できるようになっている。
【0022】
ところで、吸着ノズル33でウエハパレット22のダイシングシート24上のダイ21を吸着する際に、突き上げポット27(突き上げピン29)の突き上げ高さ位置が高くなり過ぎると、吸着ノズル33の下端がダイシングシート24上のダイ21に強く当たり過ぎてダイ21が傷付いたり、割れたり、ダイ21の内部回路が損傷してしまう可能性があり、反対に、突き上げポット27(突き上げピン29)の突き上げ高さ位置が低くなり過ぎると、吸着ノズル33でダイ21を安定して吸着できない。従って、吸着ノズル33でダイ21を傷付けずに安定して吸着するためには、突き上げポット27(突き上げピン29)の突き上げ高さ位置を厳重に管理する必要がある。また、微小なダイ21を突き上げピン29で突き上げる場合は、突き上げピン29の水平方向(XY方向)の位置も厳重に管理する必要がある。
【0023】
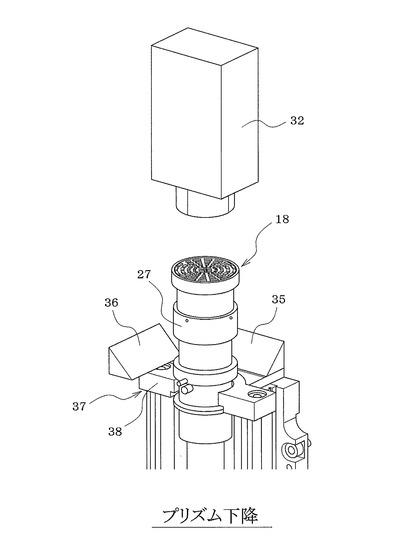
そこで、本実施例1では、突き上げユニット18に対してX方向とY方向の位置にそれぞれ光軸方向転換手段であるプリズム35,36を配置し、突き上げポット27の上面から突出した突き上げピン29のX方向の側面画像とY方向の側面画像を各プリズム35,36を介してカメラ32で撮像できるようにしている。各プリズム35,36は、ウエハパレット22のセット(出し入れ)に邪魔にならない位置に固定されている。突き上げ高さ検出時に、XY移動機構15によりカメラ32をX方向のプリズム35の上方に移動させて突き上げピン29のX方向の側面を該プリズム35を介して該カメラ32で撮像すると共に、該カメラ32をY方向のプリズム36の上方に移動させて該突き上げピン29のY方向の側面を該プリズム36を介して該カメラ32で撮像し、撮像した突き上げピン29のX方向の側面画像とY方向の側面画像を画像処理して該突き上げピン29のXY方向の位置を検出すると共に、該突き上げピン29の側面画像の画像処理結果に基づいて該突き上げピン29の破損や曲りの有無を判定するようにしている。
【0024】
更に、カメラ32で撮像した突き上げポット27及び突き上げピン29のX方向又はY方向の側面画像を画像処理して突き上げ動作時の突き上げポット27の上面の高さ位置と突き上げピン29の上端の高さ位置を検出し、該突き上げピン29の突き上げ量(突き上げピン29の上端の高さ位置と突き上げポット27の上面の高さ位置との差分値)を算出するようにしている。
【0025】
部品供給装置11の制御装置(図示せず)は、特許請求の範囲でいう画像処理手段として機能し、生産開始前の突き上げ高さ検出時に、突き上げユニット18の上方にウエハパレット22をセットせずに突き上げ動作を行って、突き上げポット27を上昇させて該突き上げポット27の上面から突き上げピン29を突出させた状態で、XY移動機構15によりカメラ32をX方向のプリズム35の上方に移動させて突き上げポット27と突き上げピン29のX方向の側面を該プリズム35を介して該カメラ32で撮像すると共に、該カメラ32をY方向のプリズム36の上方に移動させて突き上げポット27と突き上げピン29のY方向の側面を該プリズム36を介して該カメラ32で撮像し、該カメラ32から出力された突き上げポット27と突き上げピン29の側面画像を画像処理して突き上げ動作時の突き上げポット27の上面の高さ位置(突き上げ高さ位置)と突き上げピン29の上端の高さ位置(突き上げ高さ位置)を検出する。
【0026】
この際、各カメラ32の視野内に基準高さ位置を示す指標を撮像対象物と一緒に収めて撮像することで、当該基準高さ位置を基準にして突き上げポット27の上面の高さ位置や突き上げピン29の上端の高さ位置を検出するようにしても良いし、或は、カメラ32の視野の高さ位置を基準にして突き上げポット27の上面の高さ位置や突き上げピン29の上端の高さ位置を検出するようにしても良い。尚、高さ位置を検出する場合は、X方向の側面画像とY方向の側面画像から求めた高さ位置を平均して最終的な高さ位置を求めるようにしても良いし、X方向とY方向のいずれか一方向の側面画像のみから高さ位置を求めるようにしても良い。
【0027】
部品供給装置11の制御装置は、突き上げ動作時の突き上げポット27の上面の高さ位置や突き上げピン29の上端の高さ位置(突き上げ量)の検出結果に基づいて、それらの位置ずれ量が許容範囲を越えているか否かを判定し、それらの位置ずれ量が許容範囲を越えていると判定されれば、表示装置(図示せず)等に警告表示したり、警告音を発生したりして、作業者に警告するようにしている。
【0028】
また、部品供給装置11の制御装置は、突き上げピン29のX方向の側面画像とY方向の側面画像を画像処理して突き上げピン29のXY方向の位置を検出すると共に、突き上げピン29の側面画像の画像処理結果に基づいて該突き上げピン29の破損、曲りの少なくとも一方の有無を判定し、突き上げピン29の破損や曲りを検出した場合は、表示装置等に警告表示したり、警告音を発生したりして、作業者に警告するようにしている。
【0029】
以上説明した本実施例1によれば、突き上げ動作時の突き上げポット27の側面をプリズム35又は36を介してカメラ32で撮像し、撮像した突き上げポット27の側面画像を画像処理して突き上げポット27の突き上げ高さ位置を検出する機能を備えているため、突き上げポット27の突き上げ高さ位置を自動的に計測することができる。しかも、突き上げ高さ検出に用いるカメラ32は、ダイシングシート24上のダイ21を撮像するカメラ32等、突き上げ高さ検出以外の用途に使用されていたカメラを兼用できるため、専用のカメラを増設する必要がなく、低コスト化の要求も満たすことができる。
【0030】
更に、本実施例1では、突き上げ動作時に突き上げポット27の上面から突出した突き上げピン29の側面画像を用いて、突き上げ動作時の突き上げピン29の突き上げ高さ位置を自動的に計測することができる。これにより、突き上げポット27や突き上げピン29の突き上げ高さ位置の位置ずれ量が許容範囲を越えているか否かを自動的に判定することが可能となり、突き上げポット27や突き上げピン29の突き上げ高さ位置の位置ずれを修正する作業を容易に行うことができる。
【0031】
しかも、本実施例1では、突き上げピン29のX方向の側面画像とY方向の側面画像を画像処理して突き上げピン29のXY方向の位置を検出するようにしたので、突き上げピン29のXY方向の位置を自動的に計測することができる。これにより、突き上げピン29のXY方向の位置ずれ量が許容範囲を越えているか否かを自動的に判定することが可能となり、突き上げピン29のXY方向の位置ずれを修正する作業を容易に行うことができる。
【0032】
更に、本実施例1では、突き上げピン29の側面画像の画像処理結果に基づいて該突き上げピン29の破損や曲りの有無を判定するようにしたので、突き上げピン29の破損や曲りも自動的に検出することができる。
【0033】
尚、本実施例1では、突き上げポット27の突き上げ高さ位置と突き上げピン29の突き上げ高さ位置と突き上げピン29の破損・曲りを全て検出するように構成したが、これらの中から、いずれか1つ又は2つを検出するようにしても良い。
【実施例2】
【0034】
上記実施例1では、2つのプリズム35,36をウエハパレット22のセット(出し入れ)に邪魔にならない位置に固定して設けた構成としたが、部品供給装置11の構造上、ウエハパレット22のセットに邪魔にならない位置にプリズム35,36を固定して設けることがスペース的に困難な場合がある。
【0035】
そこで、本発明の実施例2では、図7及び図8に示すように、2つのプリズム35,36を一体的に上下動させる上下動機構37を設け、突き上げ高さ検出時に上下動機構37によりプリズム35,36を突き上げポット27の側面を撮像する位置へ上昇させ、突き上げ高さ検出終了後に突き上げポット27の上方にウエハパレット22をセットする前に、該ウエハパレット22のセットに邪魔にならない位置へ該プリズム35,36を下降させて退避させるようにしている。上下動機構37は、プリズム35,36を固定したスライド昇降部材38をモータ(図示せず)等のアクチュエータによって上下動させるように構成されている。その他の構成は、前記実施例1と同じである。
【0036】
以上のように構成すれば、ウエハパレット22のセットに邪魔にならない位置にプリズム35,36を固定する構成を採用することがスペース的に困難な構造の部品供給装置11であっても、本発明を実施することができる。
【0037】
尚、本発明は、部品供給装置11に装備されたカメラ32を用いて突き上げポット27と突き上げピン29の側面画像を撮像する構成に限定されず、部品実装機に装備されたカメラを用いて突き上げポット27と突き上げピン29の側面画像を撮像するようにしても良い。この場合でも、専用のカメラを増設する必要がなく、低コスト化や省スペース化の要求を満たすことができる。
【0038】
また、突き上げポット27と突き上げピン29の側面画像を部品供給装置11の制御装置で画像処理する構成に限定されず、この画像処理を部品実装機の制御装置で行うようにしても良い。
また、突き上げポット27の側方に配置する光軸方向転換手段は、プリズム35,36に限定されず、ミラー等の他の光軸方向転換手段を用いても良い。
【0039】
その他、本発明は、ウエハパレット22とトレイパレットとを混載した部品供給装置11を部品実装機にセットする構成に限定されず、ウエハパレット22のみを積載したダイ供給装置を部品実装機にセットした構成としても良い等、要旨を逸脱しない範囲内で種々変更して実施することができる。
【符号の説明】
【0040】
11…部品供給装置(ダイ供給装置)、12…マガジン保持部、13…パレット引き出しテーブル、15…XY移動機構(カメラ移動機構)、18…突き上げユニット、21…ダイ、22…ウエハパレット、23…ウエハ装着板、24…ダイシングシート、25…パレット本体、27…突き上げポット、29…突き上げピン、31…吸着ヘッド、32…カメラ、33…吸着ノズル、35,36…プリズム(光軸方向転換手段)、37…上下動機構、38…スライド昇降部材
【技術分野】
【0001】
本発明は、ダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットを備えたダイ供給装置におけるダイ突き上げ動作を管理するダイ突き上げ動作管理システムに関する発明である。
【背景技術】
【0002】
近年、特許文献1(特開2010−129949号公報)に記載されているように、ダイを供給するダイ供給装置を部品実装機にセットして、部品実装機でダイを回路基板に実装するようにしたものがある。ダイ供給装置は、複数のダイに分割するようにダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットと、前記ダイシングシートの下方に配置された突き上げポットとを備え、吸着ノズルを下降させて前記ダイシングシート上のダイを吸着してピックアップする際に、突き上げポットをダイシングシートの下面に接触する所定の吸着位置まで上昇させて該ダイシングシートを該突き上げポットの上面に吸着した状態で、該突き上げポット内の突き上げピンを該突き上げポットの上面から上方に突出させることで、該ダイシングシートのうちの吸着しようとするダイの貼着部分を該突き上げピンで突き上げて該ダイの貼着部分を該ダイシングシートから部分的に剥離させながら、該吸着ノズルに該ダイを吸着して該ダイシングシートからピックアップするようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−129949号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、吸着ノズルを下降させてダイシングシート上のダイを吸着する際に、突き上げポット(突き上げピン)の突き上げ高さ位置が高くなり過ぎると、吸着ノズルの下端がダイシングシート上のダイに強く当たり過ぎてダイが傷付いたり、割れてしまう可能性があり、反対に、突き上げポット(突き上げピン)の突き上げ高さ位置が低くなり過ぎると、吸着ノズルにダイを安定して吸着できない。従って、吸着ノズルにダイを傷付けずに安定して吸着するためには、突き上げポット(突き上げピン)の突き上げ高さ位置を厳重に管理する必要がある。また、微小なダイを突き上げピンで突き上げる場合は、突き上げピンの水平方向(XY方向)の位置も厳重に管理する必要がある。
【0005】
しかし、突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置は、突き上げユニットの各部品の組付精度や突き上げピンの取り付け具合に影響され、要求される位置精度を確保するのが難しい。そのため、生産開始前に、突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置を計測して、それらの位置ずれ量が許容範囲を越えていることが判明すれば、部品を組み付け直すなどして再び計測するという作業が必要となるが、その際、作業者が突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置を手作業で計測するようにしていたため、多くの時間を費やすことがあった。
【0006】
そこで、本発明が解決しようとする課題は、突き上げポット(突き上げピン)の突き上げ高さ位置や突き上げピンのXY方向の位置を自動的に計測する機能を備えたダイ突き上げ動作管理システムを提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、請求項1に係る発明は、複数のダイに分割するようにダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットと、前記ダイシングシートの下方に配置された突き上げポットを上下動させる突き上げ機構とを備え、吸着ノズルを下降させて前記ダイシングシート上のダイを吸着してピックアップする際に、前記突き上げポットを上昇させて該突き上げポットの上面に前記ダイシングシートを吸着した状態で、該突き上げポット内の突き上げピンを該突き上げポットの上面から上方に突出させることで、該ダイシングシートのうちの吸着しようとするダイの貼着部分を該突き上げピンで突き上げて該ダイの貼着部分を該ダイシングシートから部分的に剥離させながら、該吸着ノズルに該ダイを吸着して該ダイシングシートからピックアップするダイ供給装置に適用され、撮像対象物を上方から撮像するカメラと、前記カメラを移動させるカメラ移動機構と、前記カメラで撮像した画像を処理する画像処理手段と、突き上げ高さ検出時に前記突き上げポットの上方に前記ウエハパレットをセットせずに突き上げ動作を行って該突き上げポットを上昇させた状態で該突き上げポットの側面を撮像するために該突き上げポットの側方に配置された光軸方向転換手段(プリズム、ミラー等)とを備え、前記突き上げ高さ検出時に前記カメラ移動機構により前記カメラを前記光軸方向転換手段の上方に移動させて前記突き上げポットの側面を該光軸方向転換手段を介して該カメラで撮像し、撮像した該突き上げポットの側面画像を前記画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置を検出するようにしたものである。
【0008】
この構成によれば、突き上げ動作時の突き上げポットの側面を光軸方向転換手段を介してカメラで撮像し、撮像した突き上げポットの側面画像を画像処理して突き上げポットの突き上げ高さ位置を検出する機能を備えているため、突き上げポットの突き上げ高さ位置を自動的に計測することができる。しかも、突き上げ高さ検出に用いるカメラは、ダイシングシート上のダイを撮像するカメラ等、突き上げ高さ検出以外の用途に使用されていたカメラを兼用できるため、専用のカメラを増設する必要がなく、低コスト化の要求も満たすことができる。
【0009】
本発明は、光軸方向転換手段をウエハパレットのセット(出し入れ)に邪魔にならない位置に固定して設けた構成としても良いが、ダイ供給装置の構造上、ウエハパレットのセットに邪魔にならない位置に光軸方向転換手段を固定して設けることがスペース的に困難な場合がある。
【0010】
そこで、請求項2のように、光軸方向転換手段を上下動させる上下動機構を設け、突き上げ高さ検出時に上下動機構により光軸方向転換手段を突き上げポットの側面を撮像する位置へ上昇させ、突き上げ高さ検出終了後に突き上げポットの上方にウエハパレットをセットする前に、該光軸方向転換手段を該ウエハパレットのセットに邪魔にならない位置へ下降させるようにすると良い。このようにすれば、ウエハパレットのセットに邪魔にならない位置に光軸方向転換手段を固定する構成を採用することがスペース的に困難な構造のダイ供給装置であっても、本発明を実施することができる。
【0011】
また、請求項3のように、突き上げ高さ検出時に突き上げポットの上面から突出した突き上げピンの側面を該突き上げポットの側面と一緒にカメラで撮像し、撮像した該突き上げポットの側面画像及び該突き上げピンの側面画像を画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置及び該突き上げピンの上端の高さ位置を検出するようにしても良い。このようにすれば、突き上げ高さ検出時に突き上げピンの側面画像を用いて突き上げピンの上端の高さ位置を検出することができ、突き上げピンの突き上げ量(突き上げピンの上端の高さ位置と突き上げポットの上面の高さ位置との差分値)も計測することができる。
【0012】
本発明は、突き上げポットや突き上げポットの突き上げ高さを検出するだけであれば、光軸方向転換手段を1個のみ設ければ良いが、突き上げピンのXY方向の位置を検出する機能を付加する場合は、光軸方向転換手段を2個設ける構成とすれば良い。
【0013】
具体的には、請求項4のように、突き上げピンに対してX方向とY方向の位置にそれぞれ光軸方向転換手段を配置し、突き上げ高さ検出時にカメラ移動機構によりカメラをX方向の光軸方向転換手段の上方に移動させて突き上げピンのX方向の側面を撮像すると共に、該カメラをY方向の光軸方向転換手段の上方に移動させて該突き上げピンのY方向の側面を撮像し、撮像した該突き上げピンのX方向の側面画像とY方向の側面画像を画像処理手段により画像処理して該突き上げピンのXY方向の位置を検出するようにしても良い。このようにすれば、X方向とY方向の2つの側面画像を用いて、突き上げピンのXY方向の位置を自動的に計測することができる。
【0014】
また、請求項5のように、突き上げピンの側面画像の画像処理結果に基づいて該突き上げピンの破損、曲りの少なくとも一方の有無を判定するようにしても良い。このようにすれば、突き上げピンの側面画像を用いて、突き上げピンの破損や曲りも自動的に検出することができる。
【図面の簡単な説明】
【0015】
【図1】図1は本発明の実施例1におけるウエハパレットをセットした状態を示す部品供給装置の外観斜視図である。
【図2】図2はウエハパレットをセットする前の状態を示す部品供給装置の外観斜視図である。
【図3】図3は実施例1の突き上げポットとプリズムとの位置関係を示す外観斜視図である。
【図4】図4はウエハパレットの外観斜視図である。
【図5】図5は突き上げ動作時に突き上げポットを吸着位置まで上昇させた状態を示す一部破断拡大図である。
【図6】図6は突き上げ動作時に突き上げポットから突き上げピンを突出させた状態を示す一部破断拡大図である。
【図7】図7は実施例2におけるプリズムを突き上げポットの側面を撮像する位置へ上昇させた状態を示す斜視図である。
【図8】図8は実施例2におけるウエハパレットのセットに邪魔にならない位置へプリズムを下降させた状態を示す斜視図である。
【発明を実施するための形態】
【0016】
以下、本発明を実施するための形態を具体化した2つの実施例1,2を説明する。
【実施例1】
【0017】
以下、本発明の実施例1を図1乃至図6に基づいて説明する。
まず、部品供給装置11(ダイ供給装置)の構成を概略的に説明する。
図1に示すように、部品供給装置11は、マガジン保持部12(トレイタワー)、パレット引き出しテーブル13、XY移動機構15(カメラ移動機構)、突き上げユニット18(図3参照)等を備え、部品実装機(図示せず)にパレット引き出しテーブル13を差し込んだ状態にセットされる。
【0018】
部品供給装置11のマガジン保持部12内に上下動可能に収納されたマガジン(図示せず)には、ダイ21(ウエハ部品)を載せたウエハパレット22と、トレイ部品を載せたトレイパレット(図示せず)とを多段に混載できるように構成され、部品実装機の稼働中にマガジンからウエハパレット22とトレイパレットのいずれか一方のパレットが選択されてパレット引き出しテーブル13上に引き出されるようになっている。図4に示すように、ウエハパレット22は、ウエハを碁盤目状にダイシングして形成したダイ21を貼着した伸縮可能なダイシングシート24を、円形の開口部を有するウエハ装着板23にエキスパンドした状態で装着し、該ウエハ装着板23をパレット本体25にねじ止め等により取り付けた構成となっている。
【0019】
突き上げユニット18(図3参照)は、ウエハパレット22のダイシングシート24下方の空間領域をXY方向に移動可能に構成されている。そして、ダイシングシート24のうちのピックアップ(吸着)しようとするダイ21の貼着部分をその下方から突き上げポット27の突き上げピン29(図5、図6参照)で局所的に突き上げることで、当該ダイ21の貼着部分をダイシングシート24から部分的に剥離させてダイ21をピックアップしやすい状態に浮き上がらせるようにしている。
【0020】
この突き上げユニット18は、サーボモータ(図示せず)を駆動源として突き上げユニット18全体が上下動するように構成されている。ダイピックアップ動作時には、突き上げユニット18が上昇して突き上げポット27の上面がウエハパレット22のダイシングシート24にほぼ接触する所定のシート吸着位置まで上昇すると、ストッパ機構(図示せず)によって突き上げユニット18の上昇が止まり、更に上昇動作を続けると、突き上げポット27の上面から突き上げピン29(図5、図6参照)が上方に突出して、ダイシングシート24のうちのピックアップしようとするダイ21の貼着部分を突き上げるようになっている。この場合、駆動源となるサーボモータの回転量を調整することで、突き上げピン29の突き上げ高さ位置(突き上げ量)を調整できるようになっている。
【0021】
図1に示すように、XY移動機構15には、吸着ヘッド31とカメラ32とが組み付けられ、該XY移動機構15によって吸着ヘッド31とカメラ32が一体的にXY方向に移動するように構成されている。吸着ヘッド31には、ダイシングシート24上のダイ21を吸着する吸着ノズル33(図5、図6参照)が上下動するように設けられている。カメラ32は、ダイシングシート24上のダイ21を上方から撮像してその撮像画像を画像処理することで、吸着ノズル33で吸着するダイ21の位置を確認できるようになっている。
【0022】
ところで、吸着ノズル33でウエハパレット22のダイシングシート24上のダイ21を吸着する際に、突き上げポット27(突き上げピン29)の突き上げ高さ位置が高くなり過ぎると、吸着ノズル33の下端がダイシングシート24上のダイ21に強く当たり過ぎてダイ21が傷付いたり、割れたり、ダイ21の内部回路が損傷してしまう可能性があり、反対に、突き上げポット27(突き上げピン29)の突き上げ高さ位置が低くなり過ぎると、吸着ノズル33でダイ21を安定して吸着できない。従って、吸着ノズル33でダイ21を傷付けずに安定して吸着するためには、突き上げポット27(突き上げピン29)の突き上げ高さ位置を厳重に管理する必要がある。また、微小なダイ21を突き上げピン29で突き上げる場合は、突き上げピン29の水平方向(XY方向)の位置も厳重に管理する必要がある。
【0023】
そこで、本実施例1では、突き上げユニット18に対してX方向とY方向の位置にそれぞれ光軸方向転換手段であるプリズム35,36を配置し、突き上げポット27の上面から突出した突き上げピン29のX方向の側面画像とY方向の側面画像を各プリズム35,36を介してカメラ32で撮像できるようにしている。各プリズム35,36は、ウエハパレット22のセット(出し入れ)に邪魔にならない位置に固定されている。突き上げ高さ検出時に、XY移動機構15によりカメラ32をX方向のプリズム35の上方に移動させて突き上げピン29のX方向の側面を該プリズム35を介して該カメラ32で撮像すると共に、該カメラ32をY方向のプリズム36の上方に移動させて該突き上げピン29のY方向の側面を該プリズム36を介して該カメラ32で撮像し、撮像した突き上げピン29のX方向の側面画像とY方向の側面画像を画像処理して該突き上げピン29のXY方向の位置を検出すると共に、該突き上げピン29の側面画像の画像処理結果に基づいて該突き上げピン29の破損や曲りの有無を判定するようにしている。
【0024】
更に、カメラ32で撮像した突き上げポット27及び突き上げピン29のX方向又はY方向の側面画像を画像処理して突き上げ動作時の突き上げポット27の上面の高さ位置と突き上げピン29の上端の高さ位置を検出し、該突き上げピン29の突き上げ量(突き上げピン29の上端の高さ位置と突き上げポット27の上面の高さ位置との差分値)を算出するようにしている。
【0025】
部品供給装置11の制御装置(図示せず)は、特許請求の範囲でいう画像処理手段として機能し、生産開始前の突き上げ高さ検出時に、突き上げユニット18の上方にウエハパレット22をセットせずに突き上げ動作を行って、突き上げポット27を上昇させて該突き上げポット27の上面から突き上げピン29を突出させた状態で、XY移動機構15によりカメラ32をX方向のプリズム35の上方に移動させて突き上げポット27と突き上げピン29のX方向の側面を該プリズム35を介して該カメラ32で撮像すると共に、該カメラ32をY方向のプリズム36の上方に移動させて突き上げポット27と突き上げピン29のY方向の側面を該プリズム36を介して該カメラ32で撮像し、該カメラ32から出力された突き上げポット27と突き上げピン29の側面画像を画像処理して突き上げ動作時の突き上げポット27の上面の高さ位置(突き上げ高さ位置)と突き上げピン29の上端の高さ位置(突き上げ高さ位置)を検出する。
【0026】
この際、各カメラ32の視野内に基準高さ位置を示す指標を撮像対象物と一緒に収めて撮像することで、当該基準高さ位置を基準にして突き上げポット27の上面の高さ位置や突き上げピン29の上端の高さ位置を検出するようにしても良いし、或は、カメラ32の視野の高さ位置を基準にして突き上げポット27の上面の高さ位置や突き上げピン29の上端の高さ位置を検出するようにしても良い。尚、高さ位置を検出する場合は、X方向の側面画像とY方向の側面画像から求めた高さ位置を平均して最終的な高さ位置を求めるようにしても良いし、X方向とY方向のいずれか一方向の側面画像のみから高さ位置を求めるようにしても良い。
【0027】
部品供給装置11の制御装置は、突き上げ動作時の突き上げポット27の上面の高さ位置や突き上げピン29の上端の高さ位置(突き上げ量)の検出結果に基づいて、それらの位置ずれ量が許容範囲を越えているか否かを判定し、それらの位置ずれ量が許容範囲を越えていると判定されれば、表示装置(図示せず)等に警告表示したり、警告音を発生したりして、作業者に警告するようにしている。
【0028】
また、部品供給装置11の制御装置は、突き上げピン29のX方向の側面画像とY方向の側面画像を画像処理して突き上げピン29のXY方向の位置を検出すると共に、突き上げピン29の側面画像の画像処理結果に基づいて該突き上げピン29の破損、曲りの少なくとも一方の有無を判定し、突き上げピン29の破損や曲りを検出した場合は、表示装置等に警告表示したり、警告音を発生したりして、作業者に警告するようにしている。
【0029】
以上説明した本実施例1によれば、突き上げ動作時の突き上げポット27の側面をプリズム35又は36を介してカメラ32で撮像し、撮像した突き上げポット27の側面画像を画像処理して突き上げポット27の突き上げ高さ位置を検出する機能を備えているため、突き上げポット27の突き上げ高さ位置を自動的に計測することができる。しかも、突き上げ高さ検出に用いるカメラ32は、ダイシングシート24上のダイ21を撮像するカメラ32等、突き上げ高さ検出以外の用途に使用されていたカメラを兼用できるため、専用のカメラを増設する必要がなく、低コスト化の要求も満たすことができる。
【0030】
更に、本実施例1では、突き上げ動作時に突き上げポット27の上面から突出した突き上げピン29の側面画像を用いて、突き上げ動作時の突き上げピン29の突き上げ高さ位置を自動的に計測することができる。これにより、突き上げポット27や突き上げピン29の突き上げ高さ位置の位置ずれ量が許容範囲を越えているか否かを自動的に判定することが可能となり、突き上げポット27や突き上げピン29の突き上げ高さ位置の位置ずれを修正する作業を容易に行うことができる。
【0031】
しかも、本実施例1では、突き上げピン29のX方向の側面画像とY方向の側面画像を画像処理して突き上げピン29のXY方向の位置を検出するようにしたので、突き上げピン29のXY方向の位置を自動的に計測することができる。これにより、突き上げピン29のXY方向の位置ずれ量が許容範囲を越えているか否かを自動的に判定することが可能となり、突き上げピン29のXY方向の位置ずれを修正する作業を容易に行うことができる。
【0032】
更に、本実施例1では、突き上げピン29の側面画像の画像処理結果に基づいて該突き上げピン29の破損や曲りの有無を判定するようにしたので、突き上げピン29の破損や曲りも自動的に検出することができる。
【0033】
尚、本実施例1では、突き上げポット27の突き上げ高さ位置と突き上げピン29の突き上げ高さ位置と突き上げピン29の破損・曲りを全て検出するように構成したが、これらの中から、いずれか1つ又は2つを検出するようにしても良い。
【実施例2】
【0034】
上記実施例1では、2つのプリズム35,36をウエハパレット22のセット(出し入れ)に邪魔にならない位置に固定して設けた構成としたが、部品供給装置11の構造上、ウエハパレット22のセットに邪魔にならない位置にプリズム35,36を固定して設けることがスペース的に困難な場合がある。
【0035】
そこで、本発明の実施例2では、図7及び図8に示すように、2つのプリズム35,36を一体的に上下動させる上下動機構37を設け、突き上げ高さ検出時に上下動機構37によりプリズム35,36を突き上げポット27の側面を撮像する位置へ上昇させ、突き上げ高さ検出終了後に突き上げポット27の上方にウエハパレット22をセットする前に、該ウエハパレット22のセットに邪魔にならない位置へ該プリズム35,36を下降させて退避させるようにしている。上下動機構37は、プリズム35,36を固定したスライド昇降部材38をモータ(図示せず)等のアクチュエータによって上下動させるように構成されている。その他の構成は、前記実施例1と同じである。
【0036】
以上のように構成すれば、ウエハパレット22のセットに邪魔にならない位置にプリズム35,36を固定する構成を採用することがスペース的に困難な構造の部品供給装置11であっても、本発明を実施することができる。
【0037】
尚、本発明は、部品供給装置11に装備されたカメラ32を用いて突き上げポット27と突き上げピン29の側面画像を撮像する構成に限定されず、部品実装機に装備されたカメラを用いて突き上げポット27と突き上げピン29の側面画像を撮像するようにしても良い。この場合でも、専用のカメラを増設する必要がなく、低コスト化や省スペース化の要求を満たすことができる。
【0038】
また、突き上げポット27と突き上げピン29の側面画像を部品供給装置11の制御装置で画像処理する構成に限定されず、この画像処理を部品実装機の制御装置で行うようにしても良い。
また、突き上げポット27の側方に配置する光軸方向転換手段は、プリズム35,36に限定されず、ミラー等の他の光軸方向転換手段を用いても良い。
【0039】
その他、本発明は、ウエハパレット22とトレイパレットとを混載した部品供給装置11を部品実装機にセットする構成に限定されず、ウエハパレット22のみを積載したダイ供給装置を部品実装機にセットした構成としても良い等、要旨を逸脱しない範囲内で種々変更して実施することができる。
【符号の説明】
【0040】
11…部品供給装置(ダイ供給装置)、12…マガジン保持部、13…パレット引き出しテーブル、15…XY移動機構(カメラ移動機構)、18…突き上げユニット、21…ダイ、22…ウエハパレット、23…ウエハ装着板、24…ダイシングシート、25…パレット本体、27…突き上げポット、29…突き上げピン、31…吸着ヘッド、32…カメラ、33…吸着ノズル、35,36…プリズム(光軸方向転換手段)、37…上下動機構、38…スライド昇降部材
【特許請求の範囲】
【請求項1】
複数のダイに分割するようにダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットと、前記ダイシングシートの下方に配置された突き上げポットを上下動させる突き上げ機構とを備え、吸着ノズルを下降させて前記ダイシングシート上のダイを吸着してピックアップする際に、前記突き上げポットを上昇させて該突き上げポットの上面に前記ダイシングシートを吸着した状態で、該突き上げポット内の突き上げピンを該突き上げポットの上面から上方に突出させることで、該ダイシングシートのうちの吸着しようとするダイの貼着部分を該突き上げピンで突き上げて該ダイの貼着部分を該ダイシングシートから部分的に剥離させながら、該吸着ノズルに該ダイを吸着して該ダイシングシートからピックアップするダイ供給装置に適用され、
撮像対象物を上方から撮像するカメラと、
前記カメラを移動させるカメラ移動機構と、
前記カメラで撮像した画像を処理する画像処理手段と、
突き上げ高さ検出時に前記突き上げポットの上方に前記ウエハパレットをセットせずに突き上げ動作を行って該突き上げポットを上昇させた状態で該突き上げポットの側面を撮像するために該突き上げポットの側方に配置された光軸方向転換手段とを備え、
前記突き上げ高さ検出時に前記カメラ移動機構により前記カメラを前記光軸方向転換手段の上方に移動させて前記突き上げポットの側面を該光軸方向転換手段を介して該カメラで撮像し、撮像した該突き上げポットの側面画像を前記画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置を検出することを特徴とするダイ突き上げ動作管理システム。
【請求項2】
前記光軸方向転換手段を上下動させる上下動機構を備え、前記突き上げ高さ検出時に前記上下動機構により前記光軸方向転換手段を前記突き上げポットの側面を撮像する位置へ上昇させ、前記突き上げポットの上方に前記ウエハパレットをセットする前に、該光軸方向転換手段を該ウエハパレットのセットに邪魔にならない位置へ下降させることを特徴とする請求項1に記載のダイ突き上げ動作管理システム。
【請求項3】
前記突き上げ高さ検出時に前記突き上げポットの上面から突出した前記突き上げピンの側面を該突き上げポットの側面と一緒に前記カメラで撮像し、撮像した該突き上げポットの側面画像及び該突き上げピンの側面画像を前記画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置及び該突き上げピンの上端の高さ位置を検出することを特徴とする請求項1又は2に記載のダイ突き上げ動作管理システム。
【請求項4】
前記突き上げピンに対してX方向とY方向の位置にそれぞれ光軸方向転換手段が配置され、
前記突き上げ高さ検出時に前記カメラ移動機構により前記カメラをX方向の光軸方向転換手段の上方に移動させて前記突き上げピンのX方向の側面を撮像すると共に、該カメラをY方向の光軸方向転換手段の上方に移動させて該突き上げピンのY方向の側面を撮像し、撮像した該突き上げピンのX方向の側面画像とY方向の側面画像を前記画像処理手段により画像処理して該突き上げピンのXY方向の位置を検出することを特徴とする請求項3に記載のダイ突き上げ動作管理システム。
【請求項5】
前記画像処理手段による前記突き上げピンの側面画像の画像処理結果に基づいて該突き上げピンの破損、曲りの少なくとも一方の有無を判定する手段を備えていることを特徴とする請求項3又は4に記載のダイ突き上げ動作管理システム。
【請求項1】
複数のダイに分割するようにダイシングされたウエハが貼着された伸縮可能なダイシングシートを張ったウエハパレットと、前記ダイシングシートの下方に配置された突き上げポットを上下動させる突き上げ機構とを備え、吸着ノズルを下降させて前記ダイシングシート上のダイを吸着してピックアップする際に、前記突き上げポットを上昇させて該突き上げポットの上面に前記ダイシングシートを吸着した状態で、該突き上げポット内の突き上げピンを該突き上げポットの上面から上方に突出させることで、該ダイシングシートのうちの吸着しようとするダイの貼着部分を該突き上げピンで突き上げて該ダイの貼着部分を該ダイシングシートから部分的に剥離させながら、該吸着ノズルに該ダイを吸着して該ダイシングシートからピックアップするダイ供給装置に適用され、
撮像対象物を上方から撮像するカメラと、
前記カメラを移動させるカメラ移動機構と、
前記カメラで撮像した画像を処理する画像処理手段と、
突き上げ高さ検出時に前記突き上げポットの上方に前記ウエハパレットをセットせずに突き上げ動作を行って該突き上げポットを上昇させた状態で該突き上げポットの側面を撮像するために該突き上げポットの側方に配置された光軸方向転換手段とを備え、
前記突き上げ高さ検出時に前記カメラ移動機構により前記カメラを前記光軸方向転換手段の上方に移動させて前記突き上げポットの側面を該光軸方向転換手段を介して該カメラで撮像し、撮像した該突き上げポットの側面画像を前記画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置を検出することを特徴とするダイ突き上げ動作管理システム。
【請求項2】
前記光軸方向転換手段を上下動させる上下動機構を備え、前記突き上げ高さ検出時に前記上下動機構により前記光軸方向転換手段を前記突き上げポットの側面を撮像する位置へ上昇させ、前記突き上げポットの上方に前記ウエハパレットをセットする前に、該光軸方向転換手段を該ウエハパレットのセットに邪魔にならない位置へ下降させることを特徴とする請求項1に記載のダイ突き上げ動作管理システム。
【請求項3】
前記突き上げ高さ検出時に前記突き上げポットの上面から突出した前記突き上げピンの側面を該突き上げポットの側面と一緒に前記カメラで撮像し、撮像した該突き上げポットの側面画像及び該突き上げピンの側面画像を前記画像処理手段により画像処理して突き上げ動作時の該突き上げポットの上面の高さ位置及び該突き上げピンの上端の高さ位置を検出することを特徴とする請求項1又は2に記載のダイ突き上げ動作管理システム。
【請求項4】
前記突き上げピンに対してX方向とY方向の位置にそれぞれ光軸方向転換手段が配置され、
前記突き上げ高さ検出時に前記カメラ移動機構により前記カメラをX方向の光軸方向転換手段の上方に移動させて前記突き上げピンのX方向の側面を撮像すると共に、該カメラをY方向の光軸方向転換手段の上方に移動させて該突き上げピンのY方向の側面を撮像し、撮像した該突き上げピンのX方向の側面画像とY方向の側面画像を前記画像処理手段により画像処理して該突き上げピンのXY方向の位置を検出することを特徴とする請求項3に記載のダイ突き上げ動作管理システム。
【請求項5】
前記画像処理手段による前記突き上げピンの側面画像の画像処理結果に基づいて該突き上げピンの破損、曲りの少なくとも一方の有無を判定する手段を備えていることを特徴とする請求項3又は4に記載のダイ突き上げ動作管理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−105773(P2013−105773A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246440(P2011−246440)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000237271)富士機械製造株式会社 (775)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000237271)富士機械製造株式会社 (775)
【Fターム(参考)】
[ Back to top ]