
ダブルピストンロッド
評価電子装置と、センサー装置とを有する測距計が記載されており、前記センサー装置は反射体を有するライン状構造物へ伝送信号を送るための少なくとも一つの結合プローブを備え、前記反射体は、シリンダー、例えばピストンシリンダーの、ピストンの下側にある。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ダブルピストンロッドに関する。
【背景技術】
【0002】
食品や薬品産業の固定パイププロセスプラントにおいて、空気バルブが
(a)パイプラインの交差部での簡単な閉鎖のための単座閉塞バルブとして
(b)二つのパイプラインからの生成物を一つのパイプラインに流させるための、および、一つのパイプラインを二つのパイプラインに分割するための単座二方向バルブとして
(c)パイプラインの交差部での好ましくない生成物の混合防止の分離のための両座バルブとして、使用される。
バルブの正確な機能は、例えば、GEA/TuchenhagenやAlfa Lavalといった会社の会社パンフレットに記載されている。
【0003】
プロセスを制御するためには、バルブの位置を検知することが必要である。この目的のため、電位差計、線形可変差動変成器、又は、単にシンプルなリードスイッチなどのセンサーが用いられている。これらのセンサーは何れも取り付けが複雑であり、機械的な磨耗を部分的に受けやすく、追加の外部空間を必要とする。
【0004】
これとは逆に、提案されているマイクロ波センサーは、ピストン空間に完全に組み込むことができ、接触なしに、そして、非常に高い精度でバルブの位置を測定する。
【図面の簡単な説明】
【0005】
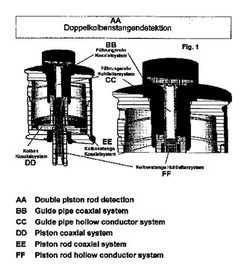
【図1】ダブルピストンロッドの検知を示す図である。
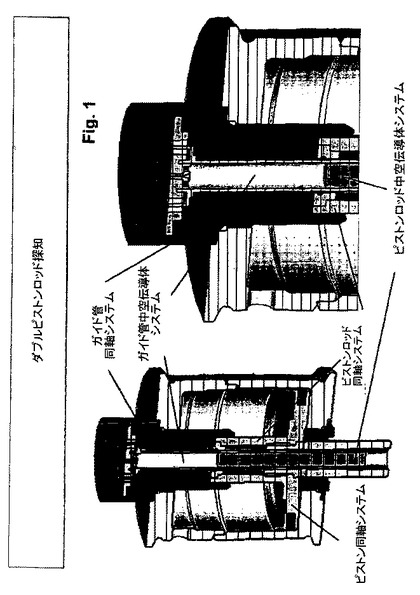
【図2】測距計の概略図である。
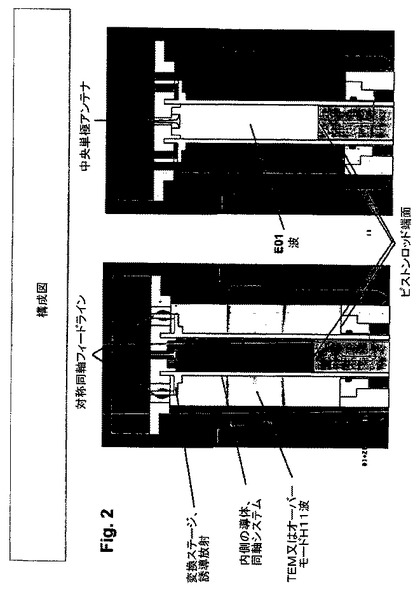
【図3】ダブルピストンロッドの検知を示す図である。
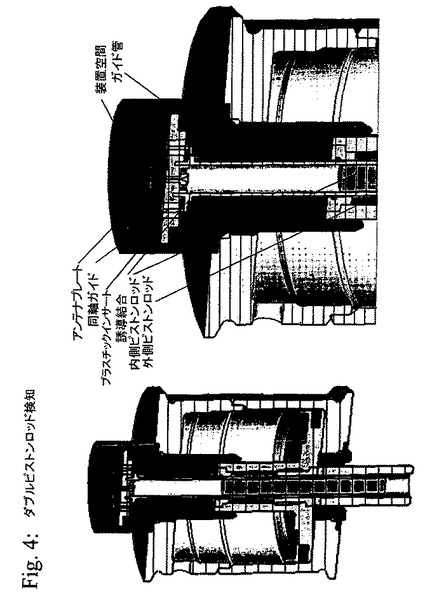
【図4】ダブルピストンロッドの検知を示す図である。
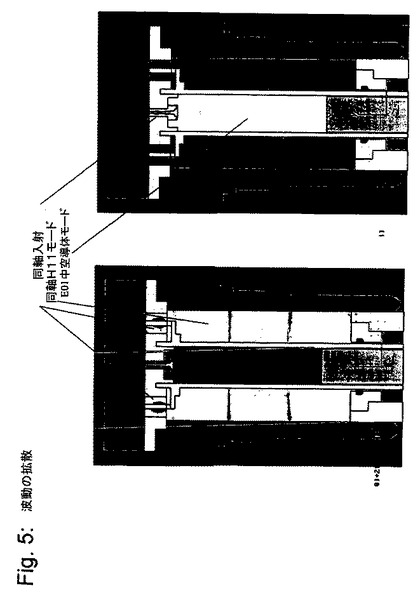
【図5】波の拡大図である。
【発明を実施するための形態】
【0006】
図1は、検知される必要がある、ただ一つのピストン(遮断バルブ、ダブルシートバルブ)への全適用に用いられるセンサーの機械的構造を示す。ピストンロッドは、いわゆるガイドパイプ内を通過している。ガイドパイプは端カバーに強固に連結されている。ガイドパイプの端には、独国特許出願公開102 05 904.7号明細書に記載されているようにアンテナが存在する。例えばプラスチックインサートにより、同軸波がアンテナ(結合プローブ)に送られ、プローブを経由して、ガイドパイプ(図2参照)へ放射され、例えばEモードの中空導体波に送り込まれる。電磁波は、ピストンロッドで反射され、アンテナで再び受信され、ここで再び同軸波へと変換され、かくしてピストンロッドの位置を決定するために、下流信号プロセスによって、送信された電磁波と、受信した電磁波との位相が評価される。ピストンロッド6の端には、高周波短絡がPPS40材などの誘電性のフィラーをともなった2枚の円盤17の形態で設けられる。さらに、例えばE01など、電磁波のフィールドタイプを適切に選択することによって、例えば、圧縮空気を下流側のシステムに伝えるために、ピストンロッドの中央に孔を設けることが可能である。
【0007】
二重着座バルブでは、互いに入り込む二つのピストンロッドの位置が同時に検知される。図1はその形態を示す。ここで、すでに単着座バルブについて既に記載したように、内側のピストンロッドはガイドパイプ内を通る。マイクロ波センサー及びアンテナを経由した電磁波の注入は同様である。第2の外側のピストンロッドを検知するため、同軸システムが実現されている。ここでは、ガイドパイプは同軸システムの内側の導体として役立つ。そして、この内側の導体との誘導結合によって電磁波が注入される。この目的のため、最善の可能な高周波の適用を達成するために、二つのステージ(図2に示す)又はそれ以上のステージの交差が実現されている。誘導結合は、その外径が徐々に小さくなり、例えば、ねじ止めにより、ガイドパイプに強固にかつ導電的に連結された、二又はそれ以上の円盤からなる。誘導性の交点、すなわち、最大直径の円盤は、同軸のフィードラインによって、外側が直接接触されている。この接触は、対称に行われなければならないから、少なくとも2つのフィードラインが必要である。もちろん、4つ、8つ、16つなどの接触を360°に亘って対称的に配置することもできる。TEMモード又は好ましくは、同軸H11モードは波タイプとして作られる。図2は、両センサーへの波の進行を示す。ここで、送受信モジュールからの電磁波の同軸のフィードラインも、例えば、圧縮ガラス又は、プラスチックインサートにより実現されている。
【0008】
送受信電子装置は、注入プレートの後の空間に配置されている。注入プレートを貫く同軸アンテナフィードラインは、送受信装置に直接接続されている。一般的に、送受信電子装置は、例えば、表面実装部品の形で導電板に固定される。
伝送周波数は、ドライブの機械的な設計に応じて数百MHz乃至約100GHzの範囲である。しかしながら、このシステムの大きな利点は、十分確立したバルブのサイズの非常に広範囲にわたって、ピストンロッド及びガイドパイプの直径は一定のままにすることができるため、センサーを例外なく使用することができることである。
【0009】
食品や薬品産業の固定パイプの加工プラントにおいて、空気バルブが
(a)パイプラインの交差部での単純な閉鎖のための単座閉塞バルブとして
(b)二つのパイプラインからの生成物を一つのパイプラインに合流させるための、および、一つのパイプラインを二つのパイプラインに分割するための二方向単座バルブとして
(c)パイプラインの交差部での好ましくない生成物の混合防止の分離のための両座バルブとして使用される。
バルブの正確な機能は、例えば、GEA/TuchenhagenやAlfa Lavalといった会社の会社パンフレットに記載されている。
【0010】
工程を制御するためには、バルブの位置を検知することが必要である。このため、電位差計、線形可変差動変成器、又は、単なるリードスイッチなどのセンサーが用いられている。これらのセンサーは何れも取り付けが複雑であり、機械的な磨耗を部分的に受け、追加の外部空間を必要とする。
【0011】
これとは逆に、提案されているマイクロ波センサーは、ピストン空間に完全に組み込むことができ、いかなる接触もなく、非常に高い精度でバルブの位置を測定する。
【0012】
図3は、検知される必要がある、ただ一つのピストン(遮断バルブ、ダブルシートバルブ)への全適用に用いられるセンサーの機械的構造を示す。ピストンロッドは、いわゆるガイドパイプ内を通る。ガイドパイプは端カバーに強固に連結されている。ガイドパイプの端には、独国特許出願公開102 05 904.7号明細書に記載されているようなアンテナが存在する。同軸波が、例えば、プラスチックインサートにより、アンテナ(結合プローブ)に送られ、このアンテナを経由して、ガイドパイプへと注入された(図2参照)、例えば、Eモードの中空導体波へ送られる。電磁波は、ピストンロッドで反射され、アンテナで再び受信され、ここで再び同軸波へと変換され、かくしてピストンロッドの位置を決定するために、下流信号プロセスによって、伝達された電磁波と、受信した電磁波との位相差が評価される。ピストンロッド6の端には、高周波短絡が、誘電性のフィラー、例えば、PPS40材での2枚の円盤17の形態で設けられる。さらに、電磁波のフィールドタイプ、例えばE01を適切に選択することによって、例えば、圧縮空気を下流側のシステムへ伝えるために、孔をピストンロッドの中央に設けることが可能である。
【0013】
両座バルブでは、互いに通る二つのピストンロッドの位置が同時に検知される。図4は形態を示す。ここで、すでに単座バルブについて既に記載したように、内側のピストンロッドはガイドパイプ内を通る。マイクロ波センサー及びアンテナを経由したマイクロ波の注入は等しい。第2の外側のピストンロッドを検知するため、同軸システムが実現されている。ここでは、ガイドパイプは同軸システムの内側の導体として機能する。そして、この内側の導体との誘導結合によって電磁波が注入される。この目的のため、最善の可能な高周波の適用を達成するために、二つのステージ(図2に示す)又は三つ以上のステージの交差が実現されている。誘導結合は、例えば、ねじ止めにより、外径が徐々に小さくなり、ガイドパイプに強固にかつ導電性をもって連結された、二又はそれ以上の円盤からなる。誘導性の交点、すなわち、最大直径の円盤は、同軸のフィードラインによって、外側が直接接触されている。この接触は、対称に行わなければならないから、少なくとも2つのフィードラインが必要である。しかしながら、4つ、8つ、16つなどの接続を360°に亘って対称的に配置することもできる。TEMモード、好ましい同軸H11モードが波タイプとして形成される。図5は、両センサーについての波の進行を示す。ここで、送受信モジュールからの電磁波の同軸のフィードラインも、例えば、圧縮ガラスや、プラスチックインサートにより実施されている。
【0014】
送受信電子装置は、注入プレートの後の空間に配置されている。注入プレートを挿通する同軸アンテナフィードラインは、送受信電子装置に直接接続される。一般的に、送受信電子装置は、フィードラインは、例えば、表面実装部品の形態で導体板に固定される。
【0015】
伝送周波数は、ドライブの機械的な設計によるが数百MHz乃至約100GHzの範囲である。しかしながら、このシステムの大きな利点は、うまく確立したバルブのサイズの広い範囲にわたって、ピストンロッド及びガイドパイプの直径が一定のままにすることができるため、センサーが例外なく使用することができることである。
【技術分野】
【0001】
本発明は、ダブルピストンロッドに関する。
【背景技術】
【0002】
食品や薬品産業の固定パイププロセスプラントにおいて、空気バルブが
(a)パイプラインの交差部での簡単な閉鎖のための単座閉塞バルブとして
(b)二つのパイプラインからの生成物を一つのパイプラインに流させるための、および、一つのパイプラインを二つのパイプラインに分割するための単座二方向バルブとして
(c)パイプラインの交差部での好ましくない生成物の混合防止の分離のための両座バルブとして、使用される。
バルブの正確な機能は、例えば、GEA/TuchenhagenやAlfa Lavalといった会社の会社パンフレットに記載されている。
【0003】
プロセスを制御するためには、バルブの位置を検知することが必要である。この目的のため、電位差計、線形可変差動変成器、又は、単にシンプルなリードスイッチなどのセンサーが用いられている。これらのセンサーは何れも取り付けが複雑であり、機械的な磨耗を部分的に受けやすく、追加の外部空間を必要とする。
【0004】
これとは逆に、提案されているマイクロ波センサーは、ピストン空間に完全に組み込むことができ、接触なしに、そして、非常に高い精度でバルブの位置を測定する。
【図面の簡単な説明】
【0005】
【図1】ダブルピストンロッドの検知を示す図である。
【図2】測距計の概略図である。
【図3】ダブルピストンロッドの検知を示す図である。
【図4】ダブルピストンロッドの検知を示す図である。
【図5】波の拡大図である。
【発明を実施するための形態】
【0006】
図1は、検知される必要がある、ただ一つのピストン(遮断バルブ、ダブルシートバルブ)への全適用に用いられるセンサーの機械的構造を示す。ピストンロッドは、いわゆるガイドパイプ内を通過している。ガイドパイプは端カバーに強固に連結されている。ガイドパイプの端には、独国特許出願公開102 05 904.7号明細書に記載されているようにアンテナが存在する。例えばプラスチックインサートにより、同軸波がアンテナ(結合プローブ)に送られ、プローブを経由して、ガイドパイプ(図2参照)へ放射され、例えばEモードの中空導体波に送り込まれる。電磁波は、ピストンロッドで反射され、アンテナで再び受信され、ここで再び同軸波へと変換され、かくしてピストンロッドの位置を決定するために、下流信号プロセスによって、送信された電磁波と、受信した電磁波との位相が評価される。ピストンロッド6の端には、高周波短絡がPPS40材などの誘電性のフィラーをともなった2枚の円盤17の形態で設けられる。さらに、例えばE01など、電磁波のフィールドタイプを適切に選択することによって、例えば、圧縮空気を下流側のシステムに伝えるために、ピストンロッドの中央に孔を設けることが可能である。
【0007】
二重着座バルブでは、互いに入り込む二つのピストンロッドの位置が同時に検知される。図1はその形態を示す。ここで、すでに単着座バルブについて既に記載したように、内側のピストンロッドはガイドパイプ内を通る。マイクロ波センサー及びアンテナを経由した電磁波の注入は同様である。第2の外側のピストンロッドを検知するため、同軸システムが実現されている。ここでは、ガイドパイプは同軸システムの内側の導体として役立つ。そして、この内側の導体との誘導結合によって電磁波が注入される。この目的のため、最善の可能な高周波の適用を達成するために、二つのステージ(図2に示す)又はそれ以上のステージの交差が実現されている。誘導結合は、その外径が徐々に小さくなり、例えば、ねじ止めにより、ガイドパイプに強固にかつ導電的に連結された、二又はそれ以上の円盤からなる。誘導性の交点、すなわち、最大直径の円盤は、同軸のフィードラインによって、外側が直接接触されている。この接触は、対称に行われなければならないから、少なくとも2つのフィードラインが必要である。もちろん、4つ、8つ、16つなどの接触を360°に亘って対称的に配置することもできる。TEMモード又は好ましくは、同軸H11モードは波タイプとして作られる。図2は、両センサーへの波の進行を示す。ここで、送受信モジュールからの電磁波の同軸のフィードラインも、例えば、圧縮ガラス又は、プラスチックインサートにより実現されている。
【0008】
送受信電子装置は、注入プレートの後の空間に配置されている。注入プレートを貫く同軸アンテナフィードラインは、送受信装置に直接接続されている。一般的に、送受信電子装置は、例えば、表面実装部品の形で導電板に固定される。
伝送周波数は、ドライブの機械的な設計に応じて数百MHz乃至約100GHzの範囲である。しかしながら、このシステムの大きな利点は、十分確立したバルブのサイズの非常に広範囲にわたって、ピストンロッド及びガイドパイプの直径は一定のままにすることができるため、センサーを例外なく使用することができることである。
【0009】
食品や薬品産業の固定パイプの加工プラントにおいて、空気バルブが
(a)パイプラインの交差部での単純な閉鎖のための単座閉塞バルブとして
(b)二つのパイプラインからの生成物を一つのパイプラインに合流させるための、および、一つのパイプラインを二つのパイプラインに分割するための二方向単座バルブとして
(c)パイプラインの交差部での好ましくない生成物の混合防止の分離のための両座バルブとして使用される。
バルブの正確な機能は、例えば、GEA/TuchenhagenやAlfa Lavalといった会社の会社パンフレットに記載されている。
【0010】
工程を制御するためには、バルブの位置を検知することが必要である。このため、電位差計、線形可変差動変成器、又は、単なるリードスイッチなどのセンサーが用いられている。これらのセンサーは何れも取り付けが複雑であり、機械的な磨耗を部分的に受け、追加の外部空間を必要とする。
【0011】
これとは逆に、提案されているマイクロ波センサーは、ピストン空間に完全に組み込むことができ、いかなる接触もなく、非常に高い精度でバルブの位置を測定する。
【0012】
図3は、検知される必要がある、ただ一つのピストン(遮断バルブ、ダブルシートバルブ)への全適用に用いられるセンサーの機械的構造を示す。ピストンロッドは、いわゆるガイドパイプ内を通る。ガイドパイプは端カバーに強固に連結されている。ガイドパイプの端には、独国特許出願公開102 05 904.7号明細書に記載されているようなアンテナが存在する。同軸波が、例えば、プラスチックインサートにより、アンテナ(結合プローブ)に送られ、このアンテナを経由して、ガイドパイプへと注入された(図2参照)、例えば、Eモードの中空導体波へ送られる。電磁波は、ピストンロッドで反射され、アンテナで再び受信され、ここで再び同軸波へと変換され、かくしてピストンロッドの位置を決定するために、下流信号プロセスによって、伝達された電磁波と、受信した電磁波との位相差が評価される。ピストンロッド6の端には、高周波短絡が、誘電性のフィラー、例えば、PPS40材での2枚の円盤17の形態で設けられる。さらに、電磁波のフィールドタイプ、例えばE01を適切に選択することによって、例えば、圧縮空気を下流側のシステムへ伝えるために、孔をピストンロッドの中央に設けることが可能である。
【0013】
両座バルブでは、互いに通る二つのピストンロッドの位置が同時に検知される。図4は形態を示す。ここで、すでに単座バルブについて既に記載したように、内側のピストンロッドはガイドパイプ内を通る。マイクロ波センサー及びアンテナを経由したマイクロ波の注入は等しい。第2の外側のピストンロッドを検知するため、同軸システムが実現されている。ここでは、ガイドパイプは同軸システムの内側の導体として機能する。そして、この内側の導体との誘導結合によって電磁波が注入される。この目的のため、最善の可能な高周波の適用を達成するために、二つのステージ(図2に示す)又は三つ以上のステージの交差が実現されている。誘導結合は、例えば、ねじ止めにより、外径が徐々に小さくなり、ガイドパイプに強固にかつ導電性をもって連結された、二又はそれ以上の円盤からなる。誘導性の交点、すなわち、最大直径の円盤は、同軸のフィードラインによって、外側が直接接触されている。この接触は、対称に行わなければならないから、少なくとも2つのフィードラインが必要である。しかしながら、4つ、8つ、16つなどの接続を360°に亘って対称的に配置することもできる。TEMモード、好ましい同軸H11モードが波タイプとして形成される。図5は、両センサーについての波の進行を示す。ここで、送受信モジュールからの電磁波の同軸のフィードラインも、例えば、圧縮ガラスや、プラスチックインサートにより実施されている。
【0014】
送受信電子装置は、注入プレートの後の空間に配置されている。注入プレートを挿通する同軸アンテナフィードラインは、送受信電子装置に直接接続される。一般的に、送受信電子装置は、フィードラインは、例えば、表面実装部品の形態で導体板に固定される。
【0015】
伝送周波数は、ドライブの機械的な設計によるが数百MHz乃至約100GHzの範囲である。しかしながら、このシステムの大きな利点は、うまく確立したバルブのサイズの広い範囲にわたって、ピストンロッド及びガイドパイプの直径が一定のままにすることができるため、センサーが例外なく使用することができることである。
【特許請求の範囲】
【請求項1】
評価電子装置及びセンサー装置を含む測距計であって、
前記センサー装置は、伝送信号を反射体を含むライン構造物へ送るための少なくとも一つの結合プローブと、を有し、
前記反射体は、例えば、空気シリンダーなどのシリンダーのピストンロッドの下側であることを特徴とする測距計。
【請求項2】
互いに通る2以上のピストンロッドが、同時に又は互いに独立して検知されることを特徴とする請求項1記載の測距計。
【請求項3】
前記最も内側のピストンロッドを探知するために、電磁波が、前記ピストンロッドの直径に応じて数MHzから100GHzの周波数範囲で、円形中空導体モード、好ましくはE01モードで、前記ライン構造物へ送り込まれる請求項1又は2に記載の測距計。
【請求項4】
前記最も内側のピストンロッドの前記ガイドパイプは、次のピストンロッドを探知するための同軸構造の内側の伝導体として機能する請求項1から3のうち何れかに記載の測距計。
【請求項5】
請求項3記載の前記同軸構造は、次のピストンロッドなどを探知するための同軸構造の内側の導体として機能する請求項1から4のうち何れかに記載の測距計。
【請求項6】
外側のピストンロッドを探知するために、電磁波が、ピストンロッドの直径に応じて、数MHz乃至100GHzの周波数帯域で、TEM又はオーバーモードのH11モードで前記同軸システムへ送り込まれる請求項1及び2に記載の測距計。
【請求項7】
前記最も内側のピストンロッドを探知するための前記電磁波のシリンダーへの注入は、独国特許出願第102 05 904.7号に記載されているように機械的ステップ(電気変換ステージ)である請求項1から6のうち何れかに記載の測距計。
【請求項8】
前記同軸システムへの電磁波の注入は、誘導的に、かつ、外径が小さくなる複数の金属リングにより行われ、直径が小さくなるリングは、電磁波が同軸システムへ注入された際に最小の反射係数を達成するために電気変換ステージとして機能する請求項1から6のうち何れか1項に記載の測距計。
【請求項9】
最大の外径を有する前記リングの接触は対称的に実行され、すなわち、180°だけ隔てられた少なくとも2箇所、または、各接触の間が夫々90°だけ隔てられた4箇所、各接点の間が夫々45°だけ隔てられた8箇所である請求項8記載の測距計。
【請求項10】
前記ピストンロッドは、下流システムを制御するための圧縮空気を伝えるために一以上の孔を有する請求項1から9のうち何れかに記載の測距計。
【請求項11】
同軸システムへの電磁波の注入は、静電的に、又は結合スロットにより実行される請求項1から6のうち何れかに記載の測距計。
【請求項12】
前記ピストンロッドの表面に、間に誘電性のフィラーを介装させた二つ以上の金属円盤の形態の電磁波のための短絡を設けることができる請求項1から10のうち何れかに記載の測距計。
【請求項13】
両モード、すなわち、円形中空導体及び同軸システムのための、より正確である独国特許出願第102 05 904.7号記載の信号評価の記述。
【請求項1】
評価電子装置及びセンサー装置を含む測距計であって、
前記センサー装置は、伝送信号を反射体を含むライン構造物へ送るための少なくとも一つの結合プローブと、を有し、
前記反射体は、例えば、空気シリンダーなどのシリンダーのピストンロッドの下側であることを特徴とする測距計。
【請求項2】
互いに通る2以上のピストンロッドが、同時に又は互いに独立して検知されることを特徴とする請求項1記載の測距計。
【請求項3】
前記最も内側のピストンロッドを探知するために、電磁波が、前記ピストンロッドの直径に応じて数MHzから100GHzの周波数範囲で、円形中空導体モード、好ましくはE01モードで、前記ライン構造物へ送り込まれる請求項1又は2に記載の測距計。
【請求項4】
前記最も内側のピストンロッドの前記ガイドパイプは、次のピストンロッドを探知するための同軸構造の内側の伝導体として機能する請求項1から3のうち何れかに記載の測距計。
【請求項5】
請求項3記載の前記同軸構造は、次のピストンロッドなどを探知するための同軸構造の内側の導体として機能する請求項1から4のうち何れかに記載の測距計。
【請求項6】
外側のピストンロッドを探知するために、電磁波が、ピストンロッドの直径に応じて、数MHz乃至100GHzの周波数帯域で、TEM又はオーバーモードのH11モードで前記同軸システムへ送り込まれる請求項1及び2に記載の測距計。
【請求項7】
前記最も内側のピストンロッドを探知するための前記電磁波のシリンダーへの注入は、独国特許出願第102 05 904.7号に記載されているように機械的ステップ(電気変換ステージ)である請求項1から6のうち何れかに記載の測距計。
【請求項8】
前記同軸システムへの電磁波の注入は、誘導的に、かつ、外径が小さくなる複数の金属リングにより行われ、直径が小さくなるリングは、電磁波が同軸システムへ注入された際に最小の反射係数を達成するために電気変換ステージとして機能する請求項1から6のうち何れか1項に記載の測距計。
【請求項9】
最大の外径を有する前記リングの接触は対称的に実行され、すなわち、180°だけ隔てられた少なくとも2箇所、または、各接触の間が夫々90°だけ隔てられた4箇所、各接点の間が夫々45°だけ隔てられた8箇所である請求項8記載の測距計。
【請求項10】
前記ピストンロッドは、下流システムを制御するための圧縮空気を伝えるために一以上の孔を有する請求項1から9のうち何れかに記載の測距計。
【請求項11】
同軸システムへの電磁波の注入は、静電的に、又は結合スロットにより実行される請求項1から6のうち何れかに記載の測距計。
【請求項12】
前記ピストンロッドの表面に、間に誘電性のフィラーを介装させた二つ以上の金属円盤の形態の電磁波のための短絡を設けることができる請求項1から10のうち何れかに記載の測距計。
【請求項13】
両モード、すなわち、円形中空導体及び同軸システムのための、より正確である独国特許出願第102 05 904.7号記載の信号評価の記述。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2010−537159(P2010−537159A)
【公表日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願番号】特願2010−520503(P2010−520503)
【出願日】平成20年8月18日(2008.8.18)
【国際出願番号】PCT/EP2008/006778
【国際公開番号】WO2009/021755
【国際公開日】平成21年2月19日(2009.2.19)
【出願人】(504310102)アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング (6)
【Fターム(参考)】
【公表日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願日】平成20年8月18日(2008.8.18)
【国際出願番号】PCT/EP2008/006778
【国際公開番号】WO2009/021755
【国際公開日】平成21年2月19日(2009.2.19)
【出願人】(504310102)アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング (6)
【Fターム(参考)】
[ Back to top ]