
チェーンの異常検出方法と、その装置
【課題】駆動走行中のチェーンの異常を検出して警報する。
【解決手段】チェーンを巻き掛けるスプロケット22に加速度センサ11、マイクロコンピュータ12を装着し、加速度センサ11の出力信号S1 を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいてチェーンの異常を判定する。
【解決手段】チェーンを巻き掛けるスプロケット22に加速度センサ11、マイクロコンピュータ12を装着し、加速度センサ11の出力信号S1 を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいてチェーンの異常を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、たとえば走行中のオートバイにおいて、走行用のチェーンの異常を適確に検出することができるチェーンの異常検出方法と、その装置に関する。
【背景技術】
【0002】
駆動走行中のチェーンの異常を検出するために、アコースチックエミッションセンサ(以下、AEセンサという)を利用することが知られている。
【0003】
たとえば、無端のチェーンを巻き掛ける駆動プーリ、従動プーリの有効径を制御して変速比を連続的に可変するV型プーリ無段変速機において、圧電素子を使用するAEセンサを駆動プーリ、従動プーリに装着する(特許文献1、2)。チェーンの劣化が進行すると、破断の前兆としてリンクプレートや連結ピンから弾性波が発生するので、AEセンサを介して弾性波を検出することにより、チェーンの破断事故を事前に予知することができる。
【特許文献1】特開2006−250236号公報
【特許文献2】特開2007−212226号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
かかる従来技術によるときは、AEセンサによって検出される弾性波の信号は、微少なパルス状の単発波形信号であることが少なくなく、駆動走行中のチェーンをチェック対象とする場合、弾性波の信号が雑音信号に埋没しがちであって、適確な異常判定を実現することが容易でないという問題があった。また、AEセンサによって弾性波が検出されてから破断事故に至るまでの時間が極く僅かであることが珍しくないため、異常警報システムとして必ずしも適切でないという問題もあった。
【0005】
そこで、この発明の目的は、かかる従来技術の問題に鑑み、AEセンサに代えて加速度センサを採用することによって、駆動走行中のチェーンの異常を適確に検出して警報することができるチェーンの異常検出方法と、その装置を提供することにある。
【課題を解決するための手段】
【0006】
かかる目的を達成するためのこの出願に係る第1発明(請求項1に係る発明をいう、以下同じ)の構成は、駆動用、従動用のスプロケットに巻き掛けて駆動走行中のチェーンの異常を検出するに際し、一方のスプロケットに装着する加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいてチェーンの異常を判定することをその要旨とする。
【0007】
なお、加速度センサにより、スプロケットの軸方向の加速度を検出してもよく、スプロケットの周方向の加速度を検出してもよい。
【0008】
また、チェーンの駆動走行速度が設定範囲内にあることを条件にして加速度センサの出力信号をサンプリングすることができる。
【0009】
第2発明(請求項5に係る発明をいう、以下同じ)の構成は、加速度センサと、加速度センサの出力信号をサンプリングするマイクロコンピュータとを備えてなり、加速度センサ、マイクロコンピュータは、無端のチェーンを巻き掛ける駆動用、従動用の各スプロケットの一方に装着し、マイクロコンピュータは、加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいて駆動走行中のチェーンの異常を判定することをその要旨とする。
【発明の効果】
【0010】
かかる第1発明の構成によるときは、加速度センサは、駆動用のスプロケット、従動用のスプロケットの一方に装着することにより、スプロケットの振動に起因する加速度を検出し、出力信号として出力することができる。そこで、加速度センサからの出力信号を所定回数サンプリングし、設定値以上の信号値のサンプリング回数、すなわち設定値以上の出力信号の出現頻度をチェックすることにより、駆動用のスプロケット、従動用のスプロケットに巻き掛けて駆動走行中のチェーンの異常を適切に判定して警報することができる。チェーンのリンクプレートや連結ピンが衝撃で変形したり、オイルが不足したりしてチェーンの長さ方向に局部伸びが生じると、チェーンの駆動走行によりスプロケットの軸方向、周方向に異常な振動を生じ、加速度センサは、それに起因する加速度を検出するからである。
【0011】
なお、このようなチェーンの異常によるスプロケットの振動は、スプロケットの径が大きい方が顕著であるから、加速度センサは、駆動用、従動用の各スプロケットのうち、大径側に装着することが好ましく、チェーンとの機械的な干渉を生じない限り、スプロケットの外周の歯に近い位置に装着することが好ましい。また、加速度センサは、振動に起因する加速度を検出するから、単なる振動センサよりも高感度であり、たとえば日立金属(株)製ピエゾ抵抗型3軸加速度センサH48Dなどが好適に使用可能である。
【0012】
加速度センサは、スプロケットの軸方向の加速度、周方向の加速度のいずれを検出するようにしてもよい。一般に、スプロケットは、薄肉の円板状の回転体であるから、その振動は、両面に平行な周方向(いわゆる面内方向)よりも、両面に垂直な軸方向(いわゆる面外方向)に顕著に生じ易い。一方、チェーンの局部伸びは、スプロケットの歯に対して周期的な衝撃力を加え、スプロケットの周方向の振動を発生させる。そこで、直交する3軸方向の加速度を個別に検出して出力する3軸加速度センサを使用することにより、必要に応じて、スプロケットの軸方向の加速度、周方向の加速度の各出力信号の一方または双方を簡単にサンプリングすることができる。
【0013】
加速度センサによって検出される加速度は、チェーンの異常に伴って発生するスプロケットの振動に起因し、チェーンの駆動走行速度に影響される。そこで、チェーンの駆動走行速度が所定の設定範囲内にあることを条件にして加速度センサの出力信号をサンプリングすることにより、チェーンの異常の有無を一層適確に判定することができる。
【0014】
第2発明の構成によるときは、駆動用、従動用の各スプロケットの一方に装着する加速度センサ、マイクロコンピュータを使用することにより、第1発明を円滑に実施することができる。加速度センサは、スプロケットの振動に起因する加速度を検出し、マイクロコンピュータは、加速度センサの出力信号をサンプリングしてチェーンの異常の有無を判定することができるからである。
【発明を実施するための最良の形態】
【0015】
以下、図面を以って発明の実施の形態を説明する。
【0016】
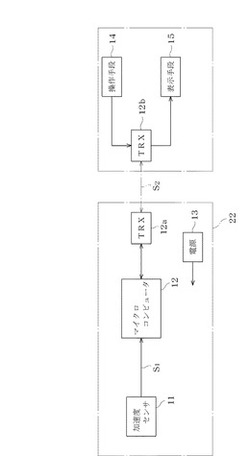
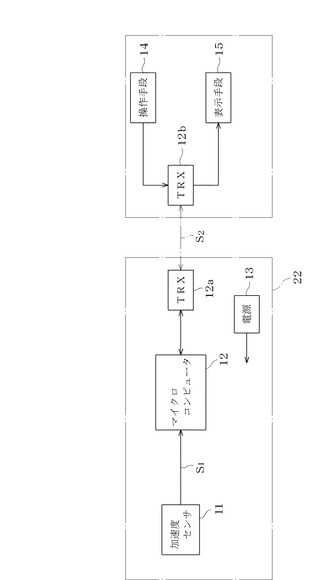
チェーンの異常検出装置は、スプロケット22に装着する加速度センサ11、マイクロコンピュータ12を備えてなる(図1、図2)。
【0017】
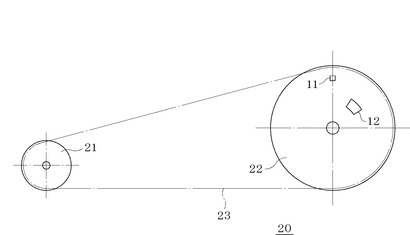
スプロケット22は、大径の従動用のスプロケットであり、小径の駆動用のスプロケット21との間に無端のチェーン23を巻き掛けることにより、チェーン23による動力伝達機構20を形成している。動力伝達機構20は、たとえばオートバイの走行用のチェーン機構であり、そのときの駆動用のスプロケット21は、クラッチを介してエンジンに連結する変速機構の出力軸に装着されており、従動用のスプロケット22は、後輪に付設されている。
【0018】
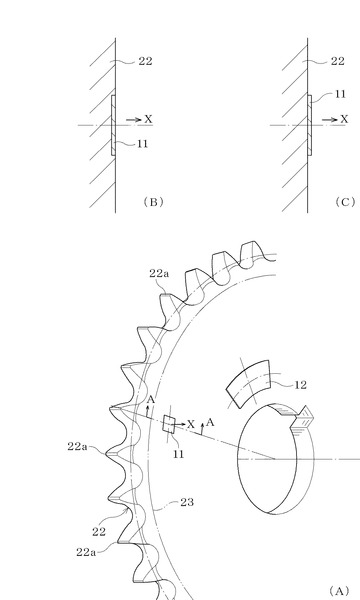
加速度センサ11は、スプロケット22の外周の歯22a、22a…に最も近く、チェーン23に干渉しない位置において、スプロケット22の片面に装着されている(図2、図3(A))。ただし、図3(A)において、一点鎖線は、スプロケット22上のチェーン23のピッチ円の位置を示し、二点鎖線は、チェーン23のリンクプレートの外形の最内側の位置を示している。加速度センサ11は、3軸加速度センサであり、スプロケット22の径方向、周方向、軸方向の加速度を個別に検出して出力することができる。加速度センサ11は、スプロケット22の表面に埋め込んでもよく(図3(B))、表面に接着してもよい(同図(C))。ただし、図3(B)、(C)は、同図(A)のA−A線矢視相当の拡大断面図である。マイクロコンピュータ12は、他の必要な部品とともに適当なプリント基板上に組み立て、スプロケット22上に固定されている。
【0019】
加速度センサ11の出力信号S1 は、マイクロコンピュータ12に入力されている(図1)。なお、出力信号S1 は、たとえばスプロケット22の軸方向(図3の矢印X方向)の加速度に対応するものとする。
【0020】
スプロケット22上の加速度センサ11、マイクロコンピュータ12は、スプロケット22に搭載する電源13によって給電されている。電源13は、たとえば独立の電池電源であってもよく、スプロケット22が回転することによって発電する発電機形式であってもよい。また、電源13は、たとえば外部からの光によって発電するソーラパネルや、電磁結合によって外部からの電気エネルギを伝達する誘導コイル形式であってもよい。
【0021】
マイクロコンピュータ12には、送受信回路12aが双方向に付設されている。送受信回路12aは、外部の送受信回路12bと双方向に組み合わせることにより、電波、赤外線、光、電磁誘導などの任意の無線信号S2 を介して、外部の操作手段14、表示手段15と、マイクロコンピュータ12との間に双方向のデータ交信を実現することができる。
【0022】
スプロケット21、22を介してチェーン23が駆動走行しているとき、操作手段14の図示しない操作スイッチを手動操作して開始指令を発生させると、開始指令は、無線信号S2 を介して送受信回路12bから送受信回路12aを経てマイクロコンピュータ12に伝達される。そこで、マイクロコンピュータ12は、たとえば図4のプログラムフローチャートに従って作動し、チェーン23の異常の有無を判定する。
【0023】
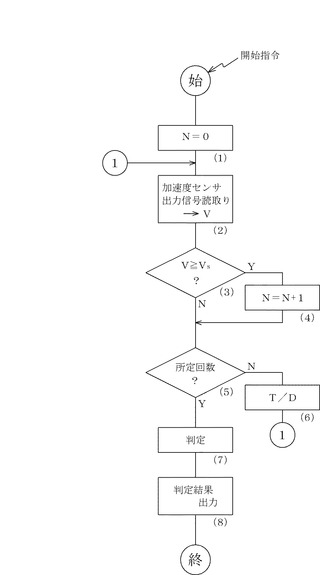
プログラムは、まず、マイクロコンピュータ12のメモリ内に設定するカウンタを計数値N=0にクリアする(図4のプログラムステップ(1)、以下、単に(1)のように記す)。つづいて、プログラムは、加速度センサ11の出力信号S1 をサンプリングして読み取り(2)、その信号値Vを設定値Vs と比較する(3)。V≧Vs であれば(3)、カウンタの計数値N=N+1に更新した上(4)、サンプリング回数が所定回数に達するまで、一定のサンプリング周期ごとに同様の動作を繰り返す((5)、(6)、(2)…(5))。ただし、プログラムステップ(3)の設定値Vs 、プログラムステップ(5)の所定回数は、それぞれあらかじめ設定され、記憶されているものとする。また、プログラムステップ(6)は、サンプリング周期を定める遅延要素である。
【0024】
サンプリング回数が所定回数に達すると(5)、プログラムは、カウンタに更新されている計数値Nに基づいて、チェーン23の異常の有無を判定し(7)、その結果を出力する(8)。たとえば、プログラムは、計数値N=0のとき、チェーン23を正常と判定し、計数値N>0のとき、チェーン23を異常と判定して外部に警報することができる。なお、プログラムステップ(8)の出力結果は、送受信回路12a、12bを介して外部の表示手段15に伝達され、たとえば表示手段15のランプ表示器により、チェーン23の異常の有無が表示される。
【0025】
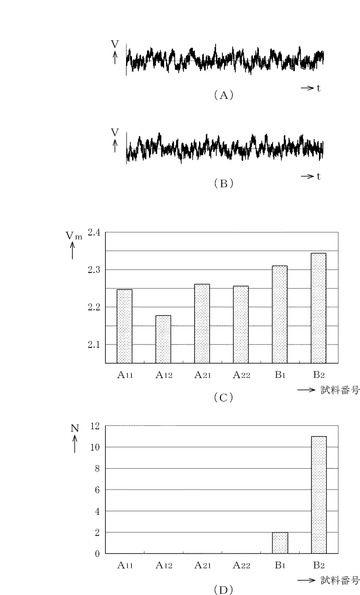
プログラムステップ(6)による判定内容は、実験によって定める。たとえば、チェーン23としてオートバイの走行用チェーンを対象とし、正常なチェーンと、0.8%の局部伸びを有する異常なチェーンとについて、オートバイの走行速度60km/h相当で駆動走行させると、加速度センサ11が検出するスプロケット22の軸方向の加速度の信号波形は、一例として図5(A)、(B)に示すとおりであった。ただし、図5(A)、(B)は、それぞれチェーン23が正常なチェーン、異常なチェーンであるとき、時間t=1秒間における加速度センサ11からの出力信号S1 の信号値Vを示している。
【0026】
図5(A)、(B)の信号波形を直接対比しても、その異同を判定することは困難である。しかし、加速度センサ11の出力信号S1 を多数回サンプリングし、サンプリングされた信号値Vの最大値Vm に着目すると、異常なチェーンの最大値Vm は、正常なチェーンのそれより明らかに大きい(図5(C))。また、適切な設定値Vs を設定すると、所定回数のサンプリング回数当りに出現するV≧Vs のサンプリング回数Nは、異常なチェーンについてN>0となり、正常なチェーンについてN=0となって(同図(D))、チェーンの異常を明確に判定することができる。
【0027】
ただし、図5(C)、(D)の横軸のAij(i=1、2、j=1、2)、Bi (i=1、2)は、それぞれ正常なチェーン、異常なチェーンの試料番号であり、i=1、2は、チェーンの駆動走行速度がそれぞれオートバイの走行速度40km/h相当、50km/h相当であることを示す。なお、図5(C)、(D)は、サンプリング周期100μSごとに15600回サンプリングしたときの実データの一例である。
【0028】
そこで、図4のプログラムステップ(7)は、プログラムステップ(3)で適切な設定値Vs を設定することにより、所定回数のサンプリング後において、プログラムステップ(4)で更新するカウンタの計数値N=0ならチェーン23が正常であり、N>0ならチェーン23が異常であると判定することができる。カウンタの計数値Nの最終値は、設定値Vs 以上の信号値Vのサンプリング回数Nに相当するからである。ただし、プログラムステップ(5)の所定回数は、たとえば5000回程度としても十分であり、プログラムステップ(6)のサンプリング周期は、たとえば50〜500μS程度であってもよいことが分かっている。
【0029】
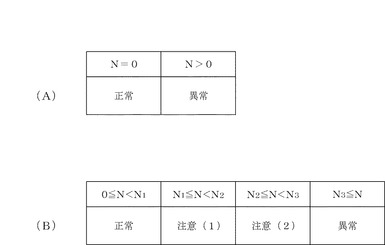
以上の説明において、図4のプログラムステップ(7)の判定は、所定回数のサンプリング後のカウンタの計数値Nに対して複数の基準値Ni (i=1、2…)を設定し、計数値Nに基づき、チェーン23に対して複数段階の判定結果を得ることも可能である(図6(B))。ちなみに、同図(A)は、前述の単一の基準値N1 =0を設定した場合を示している。
【0030】
また、加速度センサ11は、スプロケット22の軸方向の加速度を出力信号S1 としてマイクロコンピュータ12に出力するに代えて、スプロケット22の周方向の加速度を出力してもよい。さらに、加速度センサ11は、スプロケット22の軸方向、周方向の加速度を個別の出力信号S1 、S1 としてマイクロコンピュータ12に併せて出力し、マイクロコンピュータ12は、必要に応じて出力信号S1 、S1 の一方をサンプリングし、あるいは、出力信号S1 、S1 の双方をサンプリングした上でチェーン23の判定結果が明確な方を採用することも可能である。
【0031】
なお、加速度センサ11、マイクロコンピュータ12は、チェーン23を巻き掛けるスプロケット21、22のうち、大径側の一方に装着することが好ましい。
【0032】
また、図4のプログラムステップ(7)の判定は、加速度センサ11の出力信号S1 の信号値Vに対して、時間・周波数解析(離散ウェーブレット解析)を適用してもよい。異常なチェーンでは、正常なチェーンに見られない固有の振動成分が解析結果に見出されることがわかっているからである。
【他の実施の形態】
【0033】
図1の操作手段14は、図示しない速度センサからのチェーン23の駆動走行速度を示す速度信号を組み合わせることができる。操作手段14の操作スイッチを手動操作すると、操作手段14は、チェーン23の駆動走行速度が設定範囲内にあることを確認して、マイクロコンピュータ12に対して開始指令を送出する。そこで、マイクロコンピュータ12は、設定範囲内の駆動走行速度で駆動走行中のチェーン23を対象にして、図4の異常判定用のプログラムを作動させることができる。なお、チェーン23の駆動走行速度は、たとえばスプロケット22の回転速度を検出する回転センサにより検知する。
【0034】
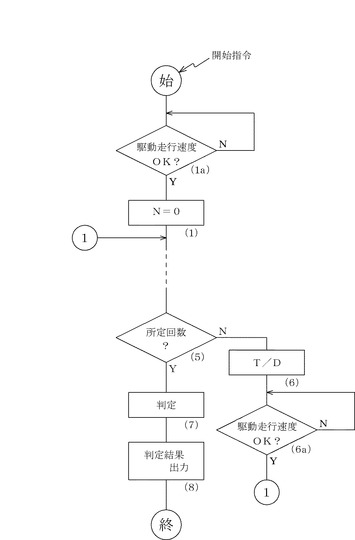
また、スプロケット22に図示しない回転センサを搭載し、回転センサの出力信号をマイクロコンピュータ12に入力させることにより、図4の異常判定用のプログラム中においてチェーン23の駆動走行速度をチェックすることができる(図7)。すなわち、図7のプログラムステップ(1a)は、加速度センサ11の出力信号S1 のサンプリング動作を開始する際にチェーン23の駆動走行速度をチェックすることを示し、プログラムステップ(6a)は、出力信号S1 のサンプリングごとにチェーン23の駆動走行速度をチェックしながら、所定回数のサンプリング動作を実行することを示す。ただし、図7は、図4の変更箇所を示す要部プログラムフローチャートである。
【0035】
なお、マイクロコンピュータ12により図7のプログラムを実行するとき、操作手段14は、操作スイッチを手動操作するに代えて、チェーン23の稼働中において、常時、一定時間ごとに定期的に開始指令を発生するようにしてもよい。
【0036】
また、オートバイの走行用のチェーンに適用するとき、操作手段14、表示手段15は、オートバイの運転手の目視範囲内に搭載することが好ましい。ただし、この発明は、オートバイの走行用のチェーン以外の任意の動力伝達機構のチェーンに対して適用可能である。
【図面の簡単な説明】
【0037】
【図1】全体構成ブロック系統図
【図2】チェーンの駆動走行状態模式図
【図3】図2の要部構成拡大説明図
【図4】プログラムフローチャート
【図5】動作説明図(1)
【図6】動作説明図(2)
【図7】他の実施の形態を示す要部プログラムフローチャート
【符号の説明】
【0038】
S1 …出力信号
V…信号値
Vs …設定値
N…サンプリング回数
11…加速度センサ
12…マイクロコンピュータ
21、22…スプロケット
23…チェーン
特許出願人 株式会社 江沼チヱン製作所
代理人 弁理士 松 田 忠 秋
【技術分野】
【0001】
この発明は、たとえば走行中のオートバイにおいて、走行用のチェーンの異常を適確に検出することができるチェーンの異常検出方法と、その装置に関する。
【背景技術】
【0002】
駆動走行中のチェーンの異常を検出するために、アコースチックエミッションセンサ(以下、AEセンサという)を利用することが知られている。
【0003】
たとえば、無端のチェーンを巻き掛ける駆動プーリ、従動プーリの有効径を制御して変速比を連続的に可変するV型プーリ無段変速機において、圧電素子を使用するAEセンサを駆動プーリ、従動プーリに装着する(特許文献1、2)。チェーンの劣化が進行すると、破断の前兆としてリンクプレートや連結ピンから弾性波が発生するので、AEセンサを介して弾性波を検出することにより、チェーンの破断事故を事前に予知することができる。
【特許文献1】特開2006−250236号公報
【特許文献2】特開2007−212226号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
かかる従来技術によるときは、AEセンサによって検出される弾性波の信号は、微少なパルス状の単発波形信号であることが少なくなく、駆動走行中のチェーンをチェック対象とする場合、弾性波の信号が雑音信号に埋没しがちであって、適確な異常判定を実現することが容易でないという問題があった。また、AEセンサによって弾性波が検出されてから破断事故に至るまでの時間が極く僅かであることが珍しくないため、異常警報システムとして必ずしも適切でないという問題もあった。
【0005】
そこで、この発明の目的は、かかる従来技術の問題に鑑み、AEセンサに代えて加速度センサを採用することによって、駆動走行中のチェーンの異常を適確に検出して警報することができるチェーンの異常検出方法と、その装置を提供することにある。
【課題を解決するための手段】
【0006】
かかる目的を達成するためのこの出願に係る第1発明(請求項1に係る発明をいう、以下同じ)の構成は、駆動用、従動用のスプロケットに巻き掛けて駆動走行中のチェーンの異常を検出するに際し、一方のスプロケットに装着する加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいてチェーンの異常を判定することをその要旨とする。
【0007】
なお、加速度センサにより、スプロケットの軸方向の加速度を検出してもよく、スプロケットの周方向の加速度を検出してもよい。
【0008】
また、チェーンの駆動走行速度が設定範囲内にあることを条件にして加速度センサの出力信号をサンプリングすることができる。
【0009】
第2発明(請求項5に係る発明をいう、以下同じ)の構成は、加速度センサと、加速度センサの出力信号をサンプリングするマイクロコンピュータとを備えてなり、加速度センサ、マイクロコンピュータは、無端のチェーンを巻き掛ける駆動用、従動用の各スプロケットの一方に装着し、マイクロコンピュータは、加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいて駆動走行中のチェーンの異常を判定することをその要旨とする。
【発明の効果】
【0010】
かかる第1発明の構成によるときは、加速度センサは、駆動用のスプロケット、従動用のスプロケットの一方に装着することにより、スプロケットの振動に起因する加速度を検出し、出力信号として出力することができる。そこで、加速度センサからの出力信号を所定回数サンプリングし、設定値以上の信号値のサンプリング回数、すなわち設定値以上の出力信号の出現頻度をチェックすることにより、駆動用のスプロケット、従動用のスプロケットに巻き掛けて駆動走行中のチェーンの異常を適切に判定して警報することができる。チェーンのリンクプレートや連結ピンが衝撃で変形したり、オイルが不足したりしてチェーンの長さ方向に局部伸びが生じると、チェーンの駆動走行によりスプロケットの軸方向、周方向に異常な振動を生じ、加速度センサは、それに起因する加速度を検出するからである。
【0011】
なお、このようなチェーンの異常によるスプロケットの振動は、スプロケットの径が大きい方が顕著であるから、加速度センサは、駆動用、従動用の各スプロケットのうち、大径側に装着することが好ましく、チェーンとの機械的な干渉を生じない限り、スプロケットの外周の歯に近い位置に装着することが好ましい。また、加速度センサは、振動に起因する加速度を検出するから、単なる振動センサよりも高感度であり、たとえば日立金属(株)製ピエゾ抵抗型3軸加速度センサH48Dなどが好適に使用可能である。
【0012】
加速度センサは、スプロケットの軸方向の加速度、周方向の加速度のいずれを検出するようにしてもよい。一般に、スプロケットは、薄肉の円板状の回転体であるから、その振動は、両面に平行な周方向(いわゆる面内方向)よりも、両面に垂直な軸方向(いわゆる面外方向)に顕著に生じ易い。一方、チェーンの局部伸びは、スプロケットの歯に対して周期的な衝撃力を加え、スプロケットの周方向の振動を発生させる。そこで、直交する3軸方向の加速度を個別に検出して出力する3軸加速度センサを使用することにより、必要に応じて、スプロケットの軸方向の加速度、周方向の加速度の各出力信号の一方または双方を簡単にサンプリングすることができる。
【0013】
加速度センサによって検出される加速度は、チェーンの異常に伴って発生するスプロケットの振動に起因し、チェーンの駆動走行速度に影響される。そこで、チェーンの駆動走行速度が所定の設定範囲内にあることを条件にして加速度センサの出力信号をサンプリングすることにより、チェーンの異常の有無を一層適確に判定することができる。
【0014】
第2発明の構成によるときは、駆動用、従動用の各スプロケットの一方に装着する加速度センサ、マイクロコンピュータを使用することにより、第1発明を円滑に実施することができる。加速度センサは、スプロケットの振動に起因する加速度を検出し、マイクロコンピュータは、加速度センサの出力信号をサンプリングしてチェーンの異常の有無を判定することができるからである。
【発明を実施するための最良の形態】
【0015】
以下、図面を以って発明の実施の形態を説明する。
【0016】
チェーンの異常検出装置は、スプロケット22に装着する加速度センサ11、マイクロコンピュータ12を備えてなる(図1、図2)。
【0017】
スプロケット22は、大径の従動用のスプロケットであり、小径の駆動用のスプロケット21との間に無端のチェーン23を巻き掛けることにより、チェーン23による動力伝達機構20を形成している。動力伝達機構20は、たとえばオートバイの走行用のチェーン機構であり、そのときの駆動用のスプロケット21は、クラッチを介してエンジンに連結する変速機構の出力軸に装着されており、従動用のスプロケット22は、後輪に付設されている。
【0018】
加速度センサ11は、スプロケット22の外周の歯22a、22a…に最も近く、チェーン23に干渉しない位置において、スプロケット22の片面に装着されている(図2、図3(A))。ただし、図3(A)において、一点鎖線は、スプロケット22上のチェーン23のピッチ円の位置を示し、二点鎖線は、チェーン23のリンクプレートの外形の最内側の位置を示している。加速度センサ11は、3軸加速度センサであり、スプロケット22の径方向、周方向、軸方向の加速度を個別に検出して出力することができる。加速度センサ11は、スプロケット22の表面に埋め込んでもよく(図3(B))、表面に接着してもよい(同図(C))。ただし、図3(B)、(C)は、同図(A)のA−A線矢視相当の拡大断面図である。マイクロコンピュータ12は、他の必要な部品とともに適当なプリント基板上に組み立て、スプロケット22上に固定されている。
【0019】
加速度センサ11の出力信号S1 は、マイクロコンピュータ12に入力されている(図1)。なお、出力信号S1 は、たとえばスプロケット22の軸方向(図3の矢印X方向)の加速度に対応するものとする。
【0020】
スプロケット22上の加速度センサ11、マイクロコンピュータ12は、スプロケット22に搭載する電源13によって給電されている。電源13は、たとえば独立の電池電源であってもよく、スプロケット22が回転することによって発電する発電機形式であってもよい。また、電源13は、たとえば外部からの光によって発電するソーラパネルや、電磁結合によって外部からの電気エネルギを伝達する誘導コイル形式であってもよい。
【0021】
マイクロコンピュータ12には、送受信回路12aが双方向に付設されている。送受信回路12aは、外部の送受信回路12bと双方向に組み合わせることにより、電波、赤外線、光、電磁誘導などの任意の無線信号S2 を介して、外部の操作手段14、表示手段15と、マイクロコンピュータ12との間に双方向のデータ交信を実現することができる。
【0022】
スプロケット21、22を介してチェーン23が駆動走行しているとき、操作手段14の図示しない操作スイッチを手動操作して開始指令を発生させると、開始指令は、無線信号S2 を介して送受信回路12bから送受信回路12aを経てマイクロコンピュータ12に伝達される。そこで、マイクロコンピュータ12は、たとえば図4のプログラムフローチャートに従って作動し、チェーン23の異常の有無を判定する。
【0023】
プログラムは、まず、マイクロコンピュータ12のメモリ内に設定するカウンタを計数値N=0にクリアする(図4のプログラムステップ(1)、以下、単に(1)のように記す)。つづいて、プログラムは、加速度センサ11の出力信号S1 をサンプリングして読み取り(2)、その信号値Vを設定値Vs と比較する(3)。V≧Vs であれば(3)、カウンタの計数値N=N+1に更新した上(4)、サンプリング回数が所定回数に達するまで、一定のサンプリング周期ごとに同様の動作を繰り返す((5)、(6)、(2)…(5))。ただし、プログラムステップ(3)の設定値Vs 、プログラムステップ(5)の所定回数は、それぞれあらかじめ設定され、記憶されているものとする。また、プログラムステップ(6)は、サンプリング周期を定める遅延要素である。
【0024】
サンプリング回数が所定回数に達すると(5)、プログラムは、カウンタに更新されている計数値Nに基づいて、チェーン23の異常の有無を判定し(7)、その結果を出力する(8)。たとえば、プログラムは、計数値N=0のとき、チェーン23を正常と判定し、計数値N>0のとき、チェーン23を異常と判定して外部に警報することができる。なお、プログラムステップ(8)の出力結果は、送受信回路12a、12bを介して外部の表示手段15に伝達され、たとえば表示手段15のランプ表示器により、チェーン23の異常の有無が表示される。
【0025】
プログラムステップ(6)による判定内容は、実験によって定める。たとえば、チェーン23としてオートバイの走行用チェーンを対象とし、正常なチェーンと、0.8%の局部伸びを有する異常なチェーンとについて、オートバイの走行速度60km/h相当で駆動走行させると、加速度センサ11が検出するスプロケット22の軸方向の加速度の信号波形は、一例として図5(A)、(B)に示すとおりであった。ただし、図5(A)、(B)は、それぞれチェーン23が正常なチェーン、異常なチェーンであるとき、時間t=1秒間における加速度センサ11からの出力信号S1 の信号値Vを示している。
【0026】
図5(A)、(B)の信号波形を直接対比しても、その異同を判定することは困難である。しかし、加速度センサ11の出力信号S1 を多数回サンプリングし、サンプリングされた信号値Vの最大値Vm に着目すると、異常なチェーンの最大値Vm は、正常なチェーンのそれより明らかに大きい(図5(C))。また、適切な設定値Vs を設定すると、所定回数のサンプリング回数当りに出現するV≧Vs のサンプリング回数Nは、異常なチェーンについてN>0となり、正常なチェーンについてN=0となって(同図(D))、チェーンの異常を明確に判定することができる。
【0027】
ただし、図5(C)、(D)の横軸のAij(i=1、2、j=1、2)、Bi (i=1、2)は、それぞれ正常なチェーン、異常なチェーンの試料番号であり、i=1、2は、チェーンの駆動走行速度がそれぞれオートバイの走行速度40km/h相当、50km/h相当であることを示す。なお、図5(C)、(D)は、サンプリング周期100μSごとに15600回サンプリングしたときの実データの一例である。
【0028】
そこで、図4のプログラムステップ(7)は、プログラムステップ(3)で適切な設定値Vs を設定することにより、所定回数のサンプリング後において、プログラムステップ(4)で更新するカウンタの計数値N=0ならチェーン23が正常であり、N>0ならチェーン23が異常であると判定することができる。カウンタの計数値Nの最終値は、設定値Vs 以上の信号値Vのサンプリング回数Nに相当するからである。ただし、プログラムステップ(5)の所定回数は、たとえば5000回程度としても十分であり、プログラムステップ(6)のサンプリング周期は、たとえば50〜500μS程度であってもよいことが分かっている。
【0029】
以上の説明において、図4のプログラムステップ(7)の判定は、所定回数のサンプリング後のカウンタの計数値Nに対して複数の基準値Ni (i=1、2…)を設定し、計数値Nに基づき、チェーン23に対して複数段階の判定結果を得ることも可能である(図6(B))。ちなみに、同図(A)は、前述の単一の基準値N1 =0を設定した場合を示している。
【0030】
また、加速度センサ11は、スプロケット22の軸方向の加速度を出力信号S1 としてマイクロコンピュータ12に出力するに代えて、スプロケット22の周方向の加速度を出力してもよい。さらに、加速度センサ11は、スプロケット22の軸方向、周方向の加速度を個別の出力信号S1 、S1 としてマイクロコンピュータ12に併せて出力し、マイクロコンピュータ12は、必要に応じて出力信号S1 、S1 の一方をサンプリングし、あるいは、出力信号S1 、S1 の双方をサンプリングした上でチェーン23の判定結果が明確な方を採用することも可能である。
【0031】
なお、加速度センサ11、マイクロコンピュータ12は、チェーン23を巻き掛けるスプロケット21、22のうち、大径側の一方に装着することが好ましい。
【0032】
また、図4のプログラムステップ(7)の判定は、加速度センサ11の出力信号S1 の信号値Vに対して、時間・周波数解析(離散ウェーブレット解析)を適用してもよい。異常なチェーンでは、正常なチェーンに見られない固有の振動成分が解析結果に見出されることがわかっているからである。
【他の実施の形態】
【0033】
図1の操作手段14は、図示しない速度センサからのチェーン23の駆動走行速度を示す速度信号を組み合わせることができる。操作手段14の操作スイッチを手動操作すると、操作手段14は、チェーン23の駆動走行速度が設定範囲内にあることを確認して、マイクロコンピュータ12に対して開始指令を送出する。そこで、マイクロコンピュータ12は、設定範囲内の駆動走行速度で駆動走行中のチェーン23を対象にして、図4の異常判定用のプログラムを作動させることができる。なお、チェーン23の駆動走行速度は、たとえばスプロケット22の回転速度を検出する回転センサにより検知する。
【0034】
また、スプロケット22に図示しない回転センサを搭載し、回転センサの出力信号をマイクロコンピュータ12に入力させることにより、図4の異常判定用のプログラム中においてチェーン23の駆動走行速度をチェックすることができる(図7)。すなわち、図7のプログラムステップ(1a)は、加速度センサ11の出力信号S1 のサンプリング動作を開始する際にチェーン23の駆動走行速度をチェックすることを示し、プログラムステップ(6a)は、出力信号S1 のサンプリングごとにチェーン23の駆動走行速度をチェックしながら、所定回数のサンプリング動作を実行することを示す。ただし、図7は、図4の変更箇所を示す要部プログラムフローチャートである。
【0035】
なお、マイクロコンピュータ12により図7のプログラムを実行するとき、操作手段14は、操作スイッチを手動操作するに代えて、チェーン23の稼働中において、常時、一定時間ごとに定期的に開始指令を発生するようにしてもよい。
【0036】
また、オートバイの走行用のチェーンに適用するとき、操作手段14、表示手段15は、オートバイの運転手の目視範囲内に搭載することが好ましい。ただし、この発明は、オートバイの走行用のチェーン以外の任意の動力伝達機構のチェーンに対して適用可能である。
【図面の簡単な説明】
【0037】
【図1】全体構成ブロック系統図
【図2】チェーンの駆動走行状態模式図
【図3】図2の要部構成拡大説明図
【図4】プログラムフローチャート
【図5】動作説明図(1)
【図6】動作説明図(2)
【図7】他の実施の形態を示す要部プログラムフローチャート
【符号の説明】
【0038】
S1 …出力信号
V…信号値
Vs …設定値
N…サンプリング回数
11…加速度センサ
12…マイクロコンピュータ
21、22…スプロケット
23…チェーン
特許出願人 株式会社 江沼チヱン製作所
代理人 弁理士 松 田 忠 秋
【特許請求の範囲】
【請求項1】
駆動用、従動用のスプロケットに巻き掛けて駆動走行中のチェーンの異常を検出するに際し、一方のスプロケットに装着する加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいてチェーンの異常を判定することを特徴とするチェーンの異常検出方法。
【請求項2】
加速度センサにより、スプロケットの軸方向の加速度を検出することを特徴とする請求項1記載のチェーンの異常検出方法。
【請求項3】
加速度センサにより、スプロケットの周方向の加速度を検出することを特徴とする請求項1記載のチェーンの異常検出方法。
【請求項4】
チェーンの駆動走行速度が設定範囲内にあることを条件にして加速度センサの出力信号をサンプリングすることを特徴とする請求項1ないし請求項3のいずれか記載のチェーンの異常検出方法。
【請求項5】
加速度センサと、該加速度センサの出力信号をサンプリングするマイクロコンピュータとを備えてなり、前記加速度センサ、マイクロコンピュータは、無端のチェーンを巻き掛ける駆動用、従動用の各スプロケットの一方に装着し、前記マイクロコンピュータは、前記加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいて駆動走行中のチェーンの異常を判定することを特徴とするチェーンの異常検出装置。
【請求項1】
駆動用、従動用のスプロケットに巻き掛けて駆動走行中のチェーンの異常を検出するに際し、一方のスプロケットに装着する加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいてチェーンの異常を判定することを特徴とするチェーンの異常検出方法。
【請求項2】
加速度センサにより、スプロケットの軸方向の加速度を検出することを特徴とする請求項1記載のチェーンの異常検出方法。
【請求項3】
加速度センサにより、スプロケットの周方向の加速度を検出することを特徴とする請求項1記載のチェーンの異常検出方法。
【請求項4】
チェーンの駆動走行速度が設定範囲内にあることを条件にして加速度センサの出力信号をサンプリングすることを特徴とする請求項1ないし請求項3のいずれか記載のチェーンの異常検出方法。
【請求項5】
加速度センサと、該加速度センサの出力信号をサンプリングするマイクロコンピュータとを備えてなり、前記加速度センサ、マイクロコンピュータは、無端のチェーンを巻き掛ける駆動用、従動用の各スプロケットの一方に装着し、前記マイクロコンピュータは、前記加速度センサの出力信号を一定のサンプリング周期ごとに所定回数サンプリングし、設定値以上の信号値のサンプリング回数に基づいて駆動走行中のチェーンの異常を判定することを特徴とするチェーンの異常検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−300243(P2009−300243A)
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願番号】特願2008−154830(P2008−154830)
【出願日】平成20年6月13日(2008.6.13)
【出願人】(000143260)株式会社江沼チヱン製作所 (14)
【Fターム(参考)】
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願日】平成20年6月13日(2008.6.13)
【出願人】(000143260)株式会社江沼チヱン製作所 (14)
【Fターム(参考)】
[ Back to top ]