
チェーン式無段変速機
【課題】最小プーリ比でのチェーン騒音を低減し、かつ最大プーリ比でのチェーン強度を確保できるチェーン式無段変速機を提供する。
【解決手段】プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、プライマリプーリ11の固定シーブ11aのシーブ面の半径方向内側領域、及びセカンダリプーリ21の固定シーブ21aのシーブ面の半径方向外側領域の少なくとも一方にクラウニング11a1 ,21a1 を形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定した。
【解決手段】プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、プライマリプーリ11の固定シーブ11aのシーブ面の半径方向内側領域、及びセカンダリプーリ21の固定シーブ21aのシーブ面の半径方向外側領域の少なくとも一方にクラウニング11a1 ,21a1 を形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は伝動体としてチェーンを使用した車両用無段変速機の騒音低減装置に関するものである。
【背景技術】
【0002】
従来より、ベルトを使用した車両用無段変速機が開発され、一部実用化されているが、ベルトに代わる伝動体としてチェーンを使用した無段変速機も提案されている。チェーンは、複数のリンクとこれらを連結する複数のピンとを備え、プーリのシーブ面とピンの端面との間に働く接触摩擦力によって駆動力を発生させるものである。
【0003】
チェーンはベルトに比べて、最小変速比や最大変速比のように伝動体のプーリに対する巻き掛け径が小さい時の発熱量が少なく、動力損失が少ないという優れた特徴がある。その反面、チェーンはベルトに比べて騒音が大きいという欠点がある。そこで、プライマリプーリの中心位置とセカンダリプーリの中心位置との軸方向距離(ミスアライメント)を適切に設定することで、チェーン騒音を低減する試みがなされている。
【0004】
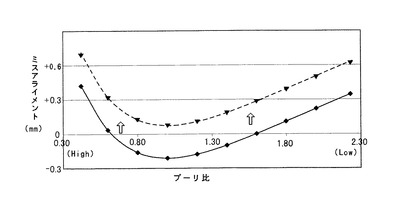
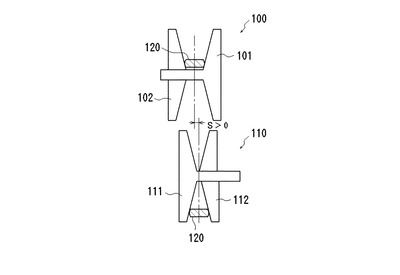
図8は、従来の無段変速機におけるミスアライメントの設定例を示す。ここでは、図9に示すように、セカンダリプーリ110の中心がプライマリプーリ100の中心に対しプライマリプーリ100の固定シーブ101側へずれている場合に、「正」のミスアライメントと定義している。図8から明らかなように、ミスアライメントはプーリ比によって変化し、最小及び最大プーリ比において正のミスアライメント、中間プーリ比において負のミスアライメントとなるように設定されている。なお、102は可動シーブ、111は固定シーブ、112は可動シーブ、120はチェーンである。
【0005】
図8の実線のようなミスアライメント設定の場合、最小プーリ比(High)でのミスアライメントが小さいため、暗騒音が小さい最小プーリ比での減速時において、チェーン騒音が耳障りになるという欠点がある。最小プーリ比でのチェーン騒音を抑制するため、図8の破線で示すように、ミスアライメントの特性カーブを全体的に正側へ移行させ、最小プーリ比におけるミスアライメントを大きくする方法が考えられる。この場合には、ミスアライメントの増大につれてチェーン120が固定シーブ101、111に強く押しつけられるので、最小プーリ比でのチェーン騒音を低減できると考えられる。
【0006】
しかし、図8の破線のような設定とした場合、最小プーリ比におけるミスアライメントだけでなく、最大プーリ比(Low)におけるミスアライメントも大きくなるので、プライマリプーリ100とセカンダリプーリ110に巻き掛けられたチェーン120の傾きが大きくなり、入力トルクが大きい最大プーリ比での発進/加速時に、チェーン負荷が大きくなり、耐久性を低下させるという問題がある。
【0007】
特許文献1には、円錐プーリにチェーンを巻きかけて無段変速する装置であって、円錐プーリに対してチェーン押し付け片の軌道ずれを防止するために、円錐プーリ面全体を膨らみ形状とするものが開示されている。
【0008】
特許文献2には、プーリ対の少なくとも一方の摩擦面が、断面でみて所定の半径Rの円弧状に形成されたものが開示されている。
【0009】
特許文献1では、プライマリプーリ及びセカンダリプーリの双方の円錐プーリ面全体を膨らみ形状としているが、プーリ比とミスアライメントとの関係について全く考慮していないため、最小プーリ比でのミスアライメントを大きくできるとは限らず、最小プーリ比でのチェーン騒音を低減できない。
【0010】
特許文献2では、プーリ対の摩擦面全体を半径方向で凸面状に形成しているが、特許文献1と同様に、プーリ比とミスアライメントとの関係については全く考慮していないため、最小プーリ比でのチェーン騒音を低減できない。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開昭61−157862号公報
【特許文献2】特開2000−314458号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明の目的は、最小プーリ比(High)でのチェーン騒音を低減し、かつ最大プーリ比(Low)でのチェーン負荷を軽減できるチェーン式無段変速機を提供することにある。
【課題を解決するための手段】
【0013】
前記目的を達成するため、本発明は、プライマリプーリとセカンダリプーリとの間に複数のリンクとこれらを連結する複数のピンとを有するチェーンを巻き掛けてなり、前記プライマリプーリはプライマリ軸に固定された固定シーブとプライマリ軸上に軸方向移動可能に支持された可動シーブとを備え、前記セカンダリプーリはセカンダリ軸に固定された固定シーブとセカンダリ軸上に軸方向移動可能に支持された可動シーブとを備え、前記プライマリプーリの固定シーブと前記セカンダリプーリの固定シーブとが前記チェーンを間にして軸方向反対側に配置されたチェーン式無段変速機において、前記プライマリプーリの固定シーブと可動シーブのシーブ面間の中心位置と前記セカンダリプーリの固定シーブと可動シーブのシーブ面間の中心位置との軸方向距離をミスアライメントとしたとき、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、前記プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及び前記セカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定したことを特徴とする、チェーン式無段変速機を提供する。
【0014】
High側でのチェーン騒音を低減し、かつLow側でのチェーン負荷を軽減するには、High側でのミスアライメントを大きくし、Low側でのミスアライメントを小さくすればよい。そこで、まず本発明では、プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及びセカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成している。半径方向内側領域とは半径方向中心より内周側を意味し、半径方向外側領域とは半径方向中心より外周側を意味する。クラウニングとは、固定シーブの断面からみて、半径方向に凸面状としたものである。クラウニングを形成することで、Low状態では、プライマリプーリに接触したチェーンがプライマリプーリの固定シーブ側へ偏位し、あるいはセカンダリプーリに接触したチェーンがセカンダリプーリの固定シーブ側へ偏位する。しかし、単にクラウニングを形成しただけでは、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるとは限らない。
【0015】
そこで、本発明では、クラウニングを形成すると同時に、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、プライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定している。Low側でのミスアライメントが小さくなるように両固定シーブの軸方向距離を設定すれば、入力トルクが大きな最大プーリ比でのチェーン負荷を軽減できる。一方、High側では、両方のプーリに巻き掛けられたチェーンがクラウニング以外の領域(円錐面)に接触するので、上述の軸方向距離の設定により、High側でのミスアライメントが自動的に大きくなり、High側でのチェーン騒音を低減できる。
【0016】
本発明のクラウニングは、プライマリプーリの固定シーブのシーブ面の半径方向内側領域と、セカンダリプーリの固定シーブのシーブ面の半径方向外側領域の一方だけに形成してもよいし、両方に形成してもよい。Low状態においてクラウニングを利用するには、プライマリプーリの固定シーブのシーブ面の最内径部のみにクラウニングを形成してもよいし、セカンダリプーリについても、固定シーブのシーブ面の最外径部のみにクラウニングを形成してもよい。また、可動シーブにも固定シーブのクラウニングと対向するクラウニングを形成してもよいが、可動シーブのクラウニングはミスアライメントに直接影響しないので、省略可能である。
【0017】
プーリ比γのミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなる領域としては、γが1を含む全領域であってもよいし、γが1より大きな所定値以上の領域であってもよい。また、Low状態でのミスアライメントは正負いずれでもよいが、望ましくは最大プーリ比(Low)のミスアライメントの絶対値を0近傍とするのがよい。これにより、Low状態におけるチェーン負荷を一層軽減できる。
【発明の効果】
【0018】
以上のように、本発明にかかるチェーン式無段変速機によれば、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及びセカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定したので、High状態でのチェーン騒音を低減できると共に、Low状態でのチェーン負荷を軽減でき、チェーンの耐久性を向上させることができる。
【図面の簡単な説明】
【0019】
【図1】本発明にかかるチェーン式無段変速機の一例のスケルトン図である。
【図2】図1に示す無段変速機の変速機構部分の詳細断面図である。
【図3】図1に示す無段変速機に使用されるチェーンの一例の斜視図である。
【図4】プライマリプーリの固定シーブとセカンダリプーリの固定シーブとを示す拡大断面図である。
【図5】本発明における最大プーリ比、最小プーリ比におけるミスアライメントを示すプーリの概略断面図である。
【図6】円錐シーブ、片側クラウニングシーブ、両側クラウニングシーブにおけるミスアライメント設定の比較図である。
【図7】ジャー音のレベルを入力軸トルクと挟圧との関係で示したマップ図である。
【図8】従来のチェーン式無段変速機におけるミスアライメント設定の例を示す特性図である。
【図9】ミスアライメントを示すプーリの概略断面図である。
【発明を実施するための形態】
【0020】
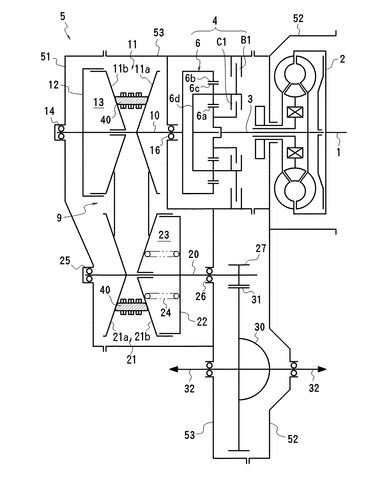
図1,図2は本発明に係るチェーン式無段変速機の一実施例を示す。この無段変速機はFF横置き式の車両用変速機であり、エンジン出力軸1によりトルクコンバータ2を介して駆動される入力軸(タービン軸)3、入力軸3の回転を正逆切り替えてプライマリ軸10に伝達する前後進切替装置4、プライマリプーリ11とセカンダリプーリ21との間にチェーン40を巻き掛けてなる無段変速装置9、セカンダリ軸20の動力をドライブ軸32に伝達するデファレンシャル装置30などで構成されている。
【0021】
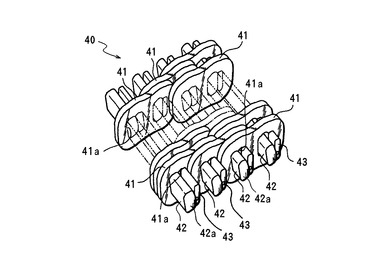
この実施例で用いられるチェーン40は、図3に示すように、複数の金属製リンク41と、これらリンク41を相互に連結する複数の金属製ピン42と、ピン42よりも長手方向の長さが若干短い複数の金属製ストリップ43とから構成されている。ピン42とストリップ43は、リンク41に形成された貫通穴41aに一本ずつ隣接して挿通されている。ピン42の端面42aはストリップ43の端面よりもチェーン幅方向外側に突出しており、その端面42aがプーリのシーブ面と接触することになる。ピン42の端面42aは、後述するシーブ面のクラウニングの曲率半径R1,R2より小径なR面となっている。そのため、ピン42の端面42aはシーブ面に対して常に点接触でき、クラウニングによる摩擦面の角度変化に対応できる。
【0022】
無段変速機を構成する各部品は変速機ケース5の中に収容されている。ここで、変速機ケース5は、後側(反エンジン側)のリヤカバー51と、前側(エンジン側)のコンバータハウジング52と、中間のトランスミッションケース53との3部品で構成されている。トルクコンバータ2はコンバータハウジング52内に収容され、前後進切替装置4はトランスミッションケース53とコンバータハウジング52との間の空間に収容されている。無段変速装置9はリヤカバー51とトランスミッションケース53との間の空間に収容され、出力ギヤ27及びデファレンシャル装置30はコンバータハウジング52とトランスミッションケース53との間の空間に収容されている。
【0023】
前後進切替装置4は、遊星歯車機構6と逆転ブレーキB1と直結クラッチC1とで構成されている。遊星歯車機構6のサンギヤ6aは入力軸3に連結され、リングギヤ6bはプライマリ軸10に連結されている。この実施例の遊星歯車機構6はシングルピニオン方式であり、逆転ブレーキB1はピニオンギヤ6cを支えるキャリア6dとトランスミッションケース53との間に設けられ、直結クラッチC1はキャリア6dとサンギヤ6aまたは入力軸3との間に設けられている。直結クラッチC1を解放して逆転ブレーキB1を締結すると、入力軸3の回転が逆転され、かつ減速されてプライマリ軸10へ伝えられ、前進走行状態となる。一方、逆転ブレーキB1を解放して直結クラッチC1を締結すると、遊星歯車機構6のキャリア6dとサンギヤ6aとが一体に回転するので、入力軸3とプライマリ軸10とが直結され、後進走行状態となる。
【0024】
無段変速装置9のプライマリプーリ11は、プライマリ軸10上に一体に形成された固定シーブ11aと、プライマリ軸10上に軸方向移動自在にかつ一体回転可能に支持された可動シーブ11bと、シリンダ12とを備え、可動シーブ11bとシリンダ12との間に油室13が形成され、この油室13への供給油量を制御することにより変速制御が実施される。セカンダリプーリ21は、セカンダリ軸20上に一体に形成された固定シーブ21aと、セカンダリ軸20上に軸方向移動自在かつ一体回転可能に支持された可動シーブ21bと、ピストン22とを備え、可動シーブ21bとピストン22との間に油室23が形成され、この油室23への供給油圧を制御することによりトルク伝達に必要な推力が与えられる。油室23内には、初期推力を与えるバイアススプリング24が収容されている。プライマリプーリ11の固定シーブ11aとセカンダリプーリ21の固定シーブ21aとがチェーン40を間にして軸方向反対側に配置されている。プライマリ軸10の両端部は、それぞれ軸受(ボールベアリング)14,16を介してリヤカバー51とトランスミッションケース53とによって回転自在に支持され、セカンダリ軸20の両端部も、それぞれ軸受(ボールベアリング)25,26を介してリヤカバー51とトランスミッションケース53とによって回転自在に支持されている。
【0025】
セカンダリ軸20の前側(エンジン側)端部は、トランスミッションケース53を貫通してエンジン側に向かって延び、この自由端部に出力ギヤ27が固定されている。出力ギヤ27はデファレンシャル装置30のリングギヤ31に噛み合っており、デファレンシャル装置30から左右に延びるドライブ軸32に動力が伝達され、車輪が駆動される。
【0026】
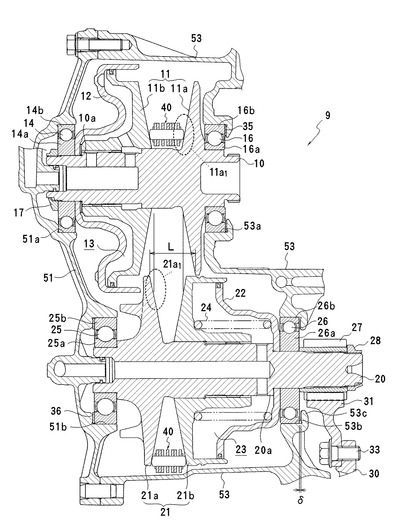
ここで、プライマリ軸10及びセカンダリ軸20の支持構造について、図2を参照しながら詳しく説明する。図2に示すように、プライマリ軸10の後側(反エンジン側)端部にはシリンダ12が圧入嵌合され、続いてボールベアリング14の内側レース14aが圧入嵌合され、プライマリ軸10の軸端にロックナット17を締結することにより、シリンダ12と内側レース14aとをプライマリ軸10の段差部10aに押しつけて固定している。これにより、プライマリ軸10に可動シーブ11b、シリンダ12、ボールベアリング14が一体的に組み付けられる。ボールベアリング14の外側レース14bはリヤカバー51のベアリング支持部51aに嵌合されている。ボールベアリング14は、リヤカバー51に対して軸方向移動不能に固定する必要はなく、外側レース14bをベアリング支持部51aの側面に当接するまで嵌合させるだけでよい。
【0027】
プライマリ軸10の前側(エンジン側)端部には、ボールベアリング16の内側レース16aが圧入嵌合され、外側レース16bがトランスミッションケース53のベアリング支持部53aに嵌合されて支持されている。このとき、ベアリング支持部53aの側面と外側レース16bの側面との隙間に第1シム35が挿入され、プライマリ軸10は軸方向に位置決めされる。このように、プライマリ軸10の両端部は、それぞれボールベアリング14,16を介してリヤカバー51とトランスミッションケース53とによって回転自在に支持されている。なお、プライマリ軸10を軸方向に位置決めするための第1シム35は、プライマリ軸10の前側のボールベアリング16の端面に配置する場合に限らず、後側のボールベアリング14の端面に配置してもよい。
【0028】
セカンダリ軸20の後側(反エンジン側)端部には、ボールベアリング25の内側レース25aが圧入嵌合され、外側レース25bがリヤカバー51のベアリング支持部51bに嵌合されている。このとき、ベアリング支持部51bの側面と外側レース25bの側面との隙間に、プライマリプーリ11とセカンダリプーリ21のミスアライメントを設定するための第2シム36が挿入されている。つまり、第2シム36は最小プーリ比(例えば0.4)におけるミスアライメントが、最大プーリ比(例えば2.3)におけるミスアライメントより大きくなるように設定するためのシムである。ボールベアリング25をリヤカバー51に対して軸方向移動不能に固定する必要はなく、単に外側レース25bをベアリング支持部51bに嵌合させるだけでよい。
【0029】
セカンダリ軸20の前側(エンジン側)にはピストン22が嵌合され、ピストン22の背後のセカンダリ軸20上にボールベアリング26の内側レース26aが圧入嵌合され、続いて出力ギヤ27がセカンダリ軸20にスプライン嵌合されている。セカンダリ軸20の軸端にロックナット28を締結することにより、出力ギヤ27、ボールベアリング26の内側レース26a及びピストン22を軸方向に押圧し、ピストン22をセカンダリ軸20の段差部20aに押し当てて固定している。これによって、セカンダリ軸20に対し、ピストン22、ボールベアリング26及び出力ギヤ27を一体的に組み付けることができる。トランスミッションケース53のベアリング支持部53bにボールベアリング26の外側レース26bを嵌合することにより、セカンダリ軸20の前側端部を回転自在に支持できる。ベアリング支持部53bの側面には壁部53cが形成されており、この壁部53cと外側レース26bとの間には、僅かな隙間δが設定されている。この隙間δは、リヤカバー51とトランスミッションケース53とを結合したとき、第1シム35をボールベアリング16の外側レース16bに確実に接触させるために設けられている。
【0030】
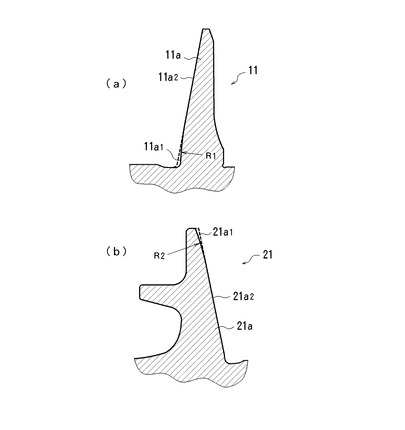
図4に示すように、プライマリプーリ11の固定シーブ11aのシーブ面の半径方向内側領域、及びセカンダリプーリ21の固定シーブ21aのシーブ面の半径方向外側領域にそれぞれクラウニング11a1 ,21a1 が形成されている。図4の破線は、クラウニングを設ける前のシーブ面を示す。クラウニング11a1 ,21a1 以外のシーブ面は、従来と同様に一定の傾斜角を持つ円錐面11a2 ,21a2 となっている。この実施例では、クラウニング11a1 は円錐面11a2 を接線とする曲率半径R1の凸曲面であり、クラウニング21a1 は円錐面21a2 を接線とする曲率半径R2の凸曲面である。なお、プライマリプーリ11の固定シーブ11aのクラウニング11a1 と対向する可動シーブ11bの部位にもクラウニングを形成し、セカンダリプーリ21の固定シーブ21aのクラウニング21a1 と対向する可動シーブ21bの部位にもクラウニングを形成してもよい。ここでは、円錐面11a2 ,21a2 の傾斜角が11°に設定され、クラウニング11a1 の曲率半径R1=600mm,クラウニング21a1 のR2=500mmに設定されている。
【0031】
さらに、最大プーリ比のミスアライメントの絶対値が最小プーリ比のミスアライメントの絶対値よりも小さくなるように、プライマリプーリ11の固定シーブ11aとセカンダリプーリ21の固定シーブ21aの軸方向距離L(図2参照)が設定されている。固定シーブ11a,21aの軸方向距離Lは上述のシム35、36によって設定されている。
【0032】
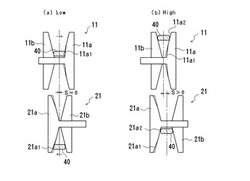
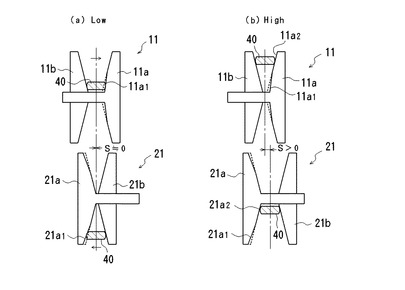
上述のようなミスアライメント設定にできる理由を図5を参照しながら説明する。図5は、クラウニングを誇張して示したプーリの断面図であり、ここでは直線状の円錐面としている。(a)は最大プーリ比、(b)は最小プーリ比を示す。(a)に示す最大プーリ比状態では、プライマリプーリ11に対するチェーン40の巻き掛け径は最小、セカンダリプーリ21に対するチェーン40の巻き掛け径は最大である。このとき、チェーン40はプライマリプーリ11のクラウニング11a1 とセカンダリプーリ21のクラウニング21a1 とに接触するため、矢印で示すようにプライマリプーリ11側についてはチェーン40は固定シーブ11a側へ偏位し、セカンダリプーリ21側についてはチェーン40は固定シーブ21a側へ偏位する。この時のミスアライメント量Sがほぼ0になるように、固定シーブ11a,21aの軸方向距離Lを設定する。一方、(b)に示す最小プーリ比状態では、プライマリプーリ11に対するチェーン40の巻き掛け径は最大、セカンダリプーリ21に対するチェーン40の巻き掛け径は最小である。このとき、チェーン40はプライマリプーリ11のクラウニング11a1 にもセカンダリプーリ21のクラウニング21a1 にも接触しない。上述のように固定シーブ11a、21aの軸方向距離Lは最大プーリ比においてミスアライメント量Sが0近傍になるように設定されているので、最小プーリ比では必然的にミスアライメント量Sは正の大きな値をとる。本実施例では、以下のようなミスアライメント量に設定した。
【0033】
【表1】

【0034】
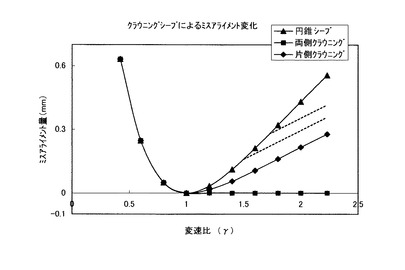
図6は、表1に示すミスアライメント設定をプーリ比との関係で示したものである。円錐シーブとはクラウニングのないシーブ面を有する場合であり、両側クラウニングとはプライマリプーリとセカンダリプーリの両方にクラウニングを形成した場合であり、片側クラウニングとはプライマリプーリとセカンダリプーリの一方にクラウニングを形成した場合である。図6からわかるように、円錐シーブでは、プーリ比γ(γ>1)のミスアライメントとプーリ比1/γのミスアライメントとが等しいが、片側クラウニング及び両側クラウニングでは、プーリ比1/γのミスアライメントがプーリ比γのミスアライメントより大きいので、暗騒音が小さい最小プーリ比での減速時において、耳障りになるチェーン騒音を効果的に低減できる。また、プーリ比γのミスアライメントがプーリ比1/γのミスアライメントより小さいので、入力トルクの大きな発進時や加速時のような最大プーリ比でのチェーン負荷を軽減でき、耐久性の向上を実現できる。特に、両側クラウニングの場合には、中間プーリ比及び最大プーリ比でのミスアライメントをほぼ0にできるので、伝達効率がよい無段変速機を実現できる。
【0035】
図6の両側クラウニング及び/又は片側クラウニングの特性は、プーリ比γが1より大きな全領域で、プーリ比1/γにおけるミスアライメントより小さくなる特性としたが、これに限るものではなく、破線で示すように、γが1より大きな所定値以上の領域において、プーリ比1/γにおけるミスアライメントより小さくなる特性としてもよい。
【0036】
図6では、両側クラウニングにおいて最大プーリ比を0近傍としたが、必ずしも0近傍である必要はなく、正の値又は負の値をとってもよい。また、中間プーリ比におけるミスアライメントを0近傍としたが、例えば図8と同様に中間プーリ比におけるミスアライメントが負の値をとってもよい。いずれにしても、最大プーリ比のミスアライメントの絶対値を最小プーリ比のミスアライメントの絶対値よりも小さくすることで、最小プーリ比でのチェーン騒音の低減と、最大プーリ比でのチェーン強度の向上とを両立できる。
【0037】
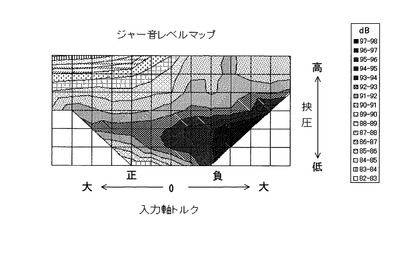
チェーン式無段変速機の場合、チェーン騒音には、ピン次数音とジャー音と呼ばれる音とがある。このうち、ピン次数音はピンとシーブ面との接触により発生する音であり、車速の変化につれて各次数音の周波数も変化する。一方、ジャー音はピン次数音とは異なり、低車速から高車速に至るまでほぼ一定した周波数成分(例えば2500〜4000Hz)を持つ騒音である。本発明者らが検討したところ、このジャー音は、図7に示すように、減速時の挟圧力(セカンダリプーリによるチェーンのクランプ力)が低い領域(High)で顕著に発生することが判明した。ジャー音は加速時にも発生していると考えられるが、加速時は暗騒音が高いので、ジャー音は目立たないのに対し、減速時は暗騒音が低いため、乗員にとって特に耳障りな騒音になる。挟圧力が低いHighでの減速時に、本発明のようなミスアライメントの設定によって、ジャー音を効果的に低減できる。
【0038】
本発明に係る無段変速機は前記実施例に限定されるものではない。チェーンとしては図3の構造に限らず、複数のリンクとこれらを連結する複数のピンとを有し、ピンの端面がシーブ面に接触するチェーンであれば、任意のものを使用できる。
【符号の説明】
【0039】
1 エンジン出力軸
3 入力軸
5 変速機ケース
9 無段変速装置
10 プライマリ軸
11 プライマリプーリ
11a 固定シーブ
11a1 クラウニング
11b 可動シーブ
20 セカンダリ軸
21 セカンダリプーリ
21a 固定シーブ
21a1 クラウニング
21b 可動シーブ
14,16,25,26 ボールベアリング
35 第1シム
36 第2シム
40 チェーン
41 リンク
42 ピン
51 リヤカバー
53 トランスミッションケース
【技術分野】
【0001】
本発明は伝動体としてチェーンを使用した車両用無段変速機の騒音低減装置に関するものである。
【背景技術】
【0002】
従来より、ベルトを使用した車両用無段変速機が開発され、一部実用化されているが、ベルトに代わる伝動体としてチェーンを使用した無段変速機も提案されている。チェーンは、複数のリンクとこれらを連結する複数のピンとを備え、プーリのシーブ面とピンの端面との間に働く接触摩擦力によって駆動力を発生させるものである。
【0003】
チェーンはベルトに比べて、最小変速比や最大変速比のように伝動体のプーリに対する巻き掛け径が小さい時の発熱量が少なく、動力損失が少ないという優れた特徴がある。その反面、チェーンはベルトに比べて騒音が大きいという欠点がある。そこで、プライマリプーリの中心位置とセカンダリプーリの中心位置との軸方向距離(ミスアライメント)を適切に設定することで、チェーン騒音を低減する試みがなされている。
【0004】
図8は、従来の無段変速機におけるミスアライメントの設定例を示す。ここでは、図9に示すように、セカンダリプーリ110の中心がプライマリプーリ100の中心に対しプライマリプーリ100の固定シーブ101側へずれている場合に、「正」のミスアライメントと定義している。図8から明らかなように、ミスアライメントはプーリ比によって変化し、最小及び最大プーリ比において正のミスアライメント、中間プーリ比において負のミスアライメントとなるように設定されている。なお、102は可動シーブ、111は固定シーブ、112は可動シーブ、120はチェーンである。
【0005】
図8の実線のようなミスアライメント設定の場合、最小プーリ比(High)でのミスアライメントが小さいため、暗騒音が小さい最小プーリ比での減速時において、チェーン騒音が耳障りになるという欠点がある。最小プーリ比でのチェーン騒音を抑制するため、図8の破線で示すように、ミスアライメントの特性カーブを全体的に正側へ移行させ、最小プーリ比におけるミスアライメントを大きくする方法が考えられる。この場合には、ミスアライメントの増大につれてチェーン120が固定シーブ101、111に強く押しつけられるので、最小プーリ比でのチェーン騒音を低減できると考えられる。
【0006】
しかし、図8の破線のような設定とした場合、最小プーリ比におけるミスアライメントだけでなく、最大プーリ比(Low)におけるミスアライメントも大きくなるので、プライマリプーリ100とセカンダリプーリ110に巻き掛けられたチェーン120の傾きが大きくなり、入力トルクが大きい最大プーリ比での発進/加速時に、チェーン負荷が大きくなり、耐久性を低下させるという問題がある。
【0007】
特許文献1には、円錐プーリにチェーンを巻きかけて無段変速する装置であって、円錐プーリに対してチェーン押し付け片の軌道ずれを防止するために、円錐プーリ面全体を膨らみ形状とするものが開示されている。
【0008】
特許文献2には、プーリ対の少なくとも一方の摩擦面が、断面でみて所定の半径Rの円弧状に形成されたものが開示されている。
【0009】
特許文献1では、プライマリプーリ及びセカンダリプーリの双方の円錐プーリ面全体を膨らみ形状としているが、プーリ比とミスアライメントとの関係について全く考慮していないため、最小プーリ比でのミスアライメントを大きくできるとは限らず、最小プーリ比でのチェーン騒音を低減できない。
【0010】
特許文献2では、プーリ対の摩擦面全体を半径方向で凸面状に形成しているが、特許文献1と同様に、プーリ比とミスアライメントとの関係については全く考慮していないため、最小プーリ比でのチェーン騒音を低減できない。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開昭61−157862号公報
【特許文献2】特開2000−314458号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明の目的は、最小プーリ比(High)でのチェーン騒音を低減し、かつ最大プーリ比(Low)でのチェーン負荷を軽減できるチェーン式無段変速機を提供することにある。
【課題を解決するための手段】
【0013】
前記目的を達成するため、本発明は、プライマリプーリとセカンダリプーリとの間に複数のリンクとこれらを連結する複数のピンとを有するチェーンを巻き掛けてなり、前記プライマリプーリはプライマリ軸に固定された固定シーブとプライマリ軸上に軸方向移動可能に支持された可動シーブとを備え、前記セカンダリプーリはセカンダリ軸に固定された固定シーブとセカンダリ軸上に軸方向移動可能に支持された可動シーブとを備え、前記プライマリプーリの固定シーブと前記セカンダリプーリの固定シーブとが前記チェーンを間にして軸方向反対側に配置されたチェーン式無段変速機において、前記プライマリプーリの固定シーブと可動シーブのシーブ面間の中心位置と前記セカンダリプーリの固定シーブと可動シーブのシーブ面間の中心位置との軸方向距離をミスアライメントとしたとき、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、前記プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及び前記セカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定したことを特徴とする、チェーン式無段変速機を提供する。
【0014】
High側でのチェーン騒音を低減し、かつLow側でのチェーン負荷を軽減するには、High側でのミスアライメントを大きくし、Low側でのミスアライメントを小さくすればよい。そこで、まず本発明では、プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及びセカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成している。半径方向内側領域とは半径方向中心より内周側を意味し、半径方向外側領域とは半径方向中心より外周側を意味する。クラウニングとは、固定シーブの断面からみて、半径方向に凸面状としたものである。クラウニングを形成することで、Low状態では、プライマリプーリに接触したチェーンがプライマリプーリの固定シーブ側へ偏位し、あるいはセカンダリプーリに接触したチェーンがセカンダリプーリの固定シーブ側へ偏位する。しかし、単にクラウニングを形成しただけでは、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるとは限らない。
【0015】
そこで、本発明では、クラウニングを形成すると同時に、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、プライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定している。Low側でのミスアライメントが小さくなるように両固定シーブの軸方向距離を設定すれば、入力トルクが大きな最大プーリ比でのチェーン負荷を軽減できる。一方、High側では、両方のプーリに巻き掛けられたチェーンがクラウニング以外の領域(円錐面)に接触するので、上述の軸方向距離の設定により、High側でのミスアライメントが自動的に大きくなり、High側でのチェーン騒音を低減できる。
【0016】
本発明のクラウニングは、プライマリプーリの固定シーブのシーブ面の半径方向内側領域と、セカンダリプーリの固定シーブのシーブ面の半径方向外側領域の一方だけに形成してもよいし、両方に形成してもよい。Low状態においてクラウニングを利用するには、プライマリプーリの固定シーブのシーブ面の最内径部のみにクラウニングを形成してもよいし、セカンダリプーリについても、固定シーブのシーブ面の最外径部のみにクラウニングを形成してもよい。また、可動シーブにも固定シーブのクラウニングと対向するクラウニングを形成してもよいが、可動シーブのクラウニングはミスアライメントに直接影響しないので、省略可能である。
【0017】
プーリ比γのミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなる領域としては、γが1を含む全領域であってもよいし、γが1より大きな所定値以上の領域であってもよい。また、Low状態でのミスアライメントは正負いずれでもよいが、望ましくは最大プーリ比(Low)のミスアライメントの絶対値を0近傍とするのがよい。これにより、Low状態におけるチェーン負荷を一層軽減できる。
【発明の効果】
【0018】
以上のように、本発明にかかるチェーン式無段変速機によれば、プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及びセカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定したので、High状態でのチェーン騒音を低減できると共に、Low状態でのチェーン負荷を軽減でき、チェーンの耐久性を向上させることができる。
【図面の簡単な説明】
【0019】
【図1】本発明にかかるチェーン式無段変速機の一例のスケルトン図である。
【図2】図1に示す無段変速機の変速機構部分の詳細断面図である。
【図3】図1に示す無段変速機に使用されるチェーンの一例の斜視図である。
【図4】プライマリプーリの固定シーブとセカンダリプーリの固定シーブとを示す拡大断面図である。
【図5】本発明における最大プーリ比、最小プーリ比におけるミスアライメントを示すプーリの概略断面図である。
【図6】円錐シーブ、片側クラウニングシーブ、両側クラウニングシーブにおけるミスアライメント設定の比較図である。
【図7】ジャー音のレベルを入力軸トルクと挟圧との関係で示したマップ図である。
【図8】従来のチェーン式無段変速機におけるミスアライメント設定の例を示す特性図である。
【図9】ミスアライメントを示すプーリの概略断面図である。
【発明を実施するための形態】
【0020】
図1,図2は本発明に係るチェーン式無段変速機の一実施例を示す。この無段変速機はFF横置き式の車両用変速機であり、エンジン出力軸1によりトルクコンバータ2を介して駆動される入力軸(タービン軸)3、入力軸3の回転を正逆切り替えてプライマリ軸10に伝達する前後進切替装置4、プライマリプーリ11とセカンダリプーリ21との間にチェーン40を巻き掛けてなる無段変速装置9、セカンダリ軸20の動力をドライブ軸32に伝達するデファレンシャル装置30などで構成されている。
【0021】
この実施例で用いられるチェーン40は、図3に示すように、複数の金属製リンク41と、これらリンク41を相互に連結する複数の金属製ピン42と、ピン42よりも長手方向の長さが若干短い複数の金属製ストリップ43とから構成されている。ピン42とストリップ43は、リンク41に形成された貫通穴41aに一本ずつ隣接して挿通されている。ピン42の端面42aはストリップ43の端面よりもチェーン幅方向外側に突出しており、その端面42aがプーリのシーブ面と接触することになる。ピン42の端面42aは、後述するシーブ面のクラウニングの曲率半径R1,R2より小径なR面となっている。そのため、ピン42の端面42aはシーブ面に対して常に点接触でき、クラウニングによる摩擦面の角度変化に対応できる。
【0022】
無段変速機を構成する各部品は変速機ケース5の中に収容されている。ここで、変速機ケース5は、後側(反エンジン側)のリヤカバー51と、前側(エンジン側)のコンバータハウジング52と、中間のトランスミッションケース53との3部品で構成されている。トルクコンバータ2はコンバータハウジング52内に収容され、前後進切替装置4はトランスミッションケース53とコンバータハウジング52との間の空間に収容されている。無段変速装置9はリヤカバー51とトランスミッションケース53との間の空間に収容され、出力ギヤ27及びデファレンシャル装置30はコンバータハウジング52とトランスミッションケース53との間の空間に収容されている。
【0023】
前後進切替装置4は、遊星歯車機構6と逆転ブレーキB1と直結クラッチC1とで構成されている。遊星歯車機構6のサンギヤ6aは入力軸3に連結され、リングギヤ6bはプライマリ軸10に連結されている。この実施例の遊星歯車機構6はシングルピニオン方式であり、逆転ブレーキB1はピニオンギヤ6cを支えるキャリア6dとトランスミッションケース53との間に設けられ、直結クラッチC1はキャリア6dとサンギヤ6aまたは入力軸3との間に設けられている。直結クラッチC1を解放して逆転ブレーキB1を締結すると、入力軸3の回転が逆転され、かつ減速されてプライマリ軸10へ伝えられ、前進走行状態となる。一方、逆転ブレーキB1を解放して直結クラッチC1を締結すると、遊星歯車機構6のキャリア6dとサンギヤ6aとが一体に回転するので、入力軸3とプライマリ軸10とが直結され、後進走行状態となる。
【0024】
無段変速装置9のプライマリプーリ11は、プライマリ軸10上に一体に形成された固定シーブ11aと、プライマリ軸10上に軸方向移動自在にかつ一体回転可能に支持された可動シーブ11bと、シリンダ12とを備え、可動シーブ11bとシリンダ12との間に油室13が形成され、この油室13への供給油量を制御することにより変速制御が実施される。セカンダリプーリ21は、セカンダリ軸20上に一体に形成された固定シーブ21aと、セカンダリ軸20上に軸方向移動自在かつ一体回転可能に支持された可動シーブ21bと、ピストン22とを備え、可動シーブ21bとピストン22との間に油室23が形成され、この油室23への供給油圧を制御することによりトルク伝達に必要な推力が与えられる。油室23内には、初期推力を与えるバイアススプリング24が収容されている。プライマリプーリ11の固定シーブ11aとセカンダリプーリ21の固定シーブ21aとがチェーン40を間にして軸方向反対側に配置されている。プライマリ軸10の両端部は、それぞれ軸受(ボールベアリング)14,16を介してリヤカバー51とトランスミッションケース53とによって回転自在に支持され、セカンダリ軸20の両端部も、それぞれ軸受(ボールベアリング)25,26を介してリヤカバー51とトランスミッションケース53とによって回転自在に支持されている。
【0025】
セカンダリ軸20の前側(エンジン側)端部は、トランスミッションケース53を貫通してエンジン側に向かって延び、この自由端部に出力ギヤ27が固定されている。出力ギヤ27はデファレンシャル装置30のリングギヤ31に噛み合っており、デファレンシャル装置30から左右に延びるドライブ軸32に動力が伝達され、車輪が駆動される。
【0026】
ここで、プライマリ軸10及びセカンダリ軸20の支持構造について、図2を参照しながら詳しく説明する。図2に示すように、プライマリ軸10の後側(反エンジン側)端部にはシリンダ12が圧入嵌合され、続いてボールベアリング14の内側レース14aが圧入嵌合され、プライマリ軸10の軸端にロックナット17を締結することにより、シリンダ12と内側レース14aとをプライマリ軸10の段差部10aに押しつけて固定している。これにより、プライマリ軸10に可動シーブ11b、シリンダ12、ボールベアリング14が一体的に組み付けられる。ボールベアリング14の外側レース14bはリヤカバー51のベアリング支持部51aに嵌合されている。ボールベアリング14は、リヤカバー51に対して軸方向移動不能に固定する必要はなく、外側レース14bをベアリング支持部51aの側面に当接するまで嵌合させるだけでよい。
【0027】
プライマリ軸10の前側(エンジン側)端部には、ボールベアリング16の内側レース16aが圧入嵌合され、外側レース16bがトランスミッションケース53のベアリング支持部53aに嵌合されて支持されている。このとき、ベアリング支持部53aの側面と外側レース16bの側面との隙間に第1シム35が挿入され、プライマリ軸10は軸方向に位置決めされる。このように、プライマリ軸10の両端部は、それぞれボールベアリング14,16を介してリヤカバー51とトランスミッションケース53とによって回転自在に支持されている。なお、プライマリ軸10を軸方向に位置決めするための第1シム35は、プライマリ軸10の前側のボールベアリング16の端面に配置する場合に限らず、後側のボールベアリング14の端面に配置してもよい。
【0028】
セカンダリ軸20の後側(反エンジン側)端部には、ボールベアリング25の内側レース25aが圧入嵌合され、外側レース25bがリヤカバー51のベアリング支持部51bに嵌合されている。このとき、ベアリング支持部51bの側面と外側レース25bの側面との隙間に、プライマリプーリ11とセカンダリプーリ21のミスアライメントを設定するための第2シム36が挿入されている。つまり、第2シム36は最小プーリ比(例えば0.4)におけるミスアライメントが、最大プーリ比(例えば2.3)におけるミスアライメントより大きくなるように設定するためのシムである。ボールベアリング25をリヤカバー51に対して軸方向移動不能に固定する必要はなく、単に外側レース25bをベアリング支持部51bに嵌合させるだけでよい。
【0029】
セカンダリ軸20の前側(エンジン側)にはピストン22が嵌合され、ピストン22の背後のセカンダリ軸20上にボールベアリング26の内側レース26aが圧入嵌合され、続いて出力ギヤ27がセカンダリ軸20にスプライン嵌合されている。セカンダリ軸20の軸端にロックナット28を締結することにより、出力ギヤ27、ボールベアリング26の内側レース26a及びピストン22を軸方向に押圧し、ピストン22をセカンダリ軸20の段差部20aに押し当てて固定している。これによって、セカンダリ軸20に対し、ピストン22、ボールベアリング26及び出力ギヤ27を一体的に組み付けることができる。トランスミッションケース53のベアリング支持部53bにボールベアリング26の外側レース26bを嵌合することにより、セカンダリ軸20の前側端部を回転自在に支持できる。ベアリング支持部53bの側面には壁部53cが形成されており、この壁部53cと外側レース26bとの間には、僅かな隙間δが設定されている。この隙間δは、リヤカバー51とトランスミッションケース53とを結合したとき、第1シム35をボールベアリング16の外側レース16bに確実に接触させるために設けられている。
【0030】
図4に示すように、プライマリプーリ11の固定シーブ11aのシーブ面の半径方向内側領域、及びセカンダリプーリ21の固定シーブ21aのシーブ面の半径方向外側領域にそれぞれクラウニング11a1 ,21a1 が形成されている。図4の破線は、クラウニングを設ける前のシーブ面を示す。クラウニング11a1 ,21a1 以外のシーブ面は、従来と同様に一定の傾斜角を持つ円錐面11a2 ,21a2 となっている。この実施例では、クラウニング11a1 は円錐面11a2 を接線とする曲率半径R1の凸曲面であり、クラウニング21a1 は円錐面21a2 を接線とする曲率半径R2の凸曲面である。なお、プライマリプーリ11の固定シーブ11aのクラウニング11a1 と対向する可動シーブ11bの部位にもクラウニングを形成し、セカンダリプーリ21の固定シーブ21aのクラウニング21a1 と対向する可動シーブ21bの部位にもクラウニングを形成してもよい。ここでは、円錐面11a2 ,21a2 の傾斜角が11°に設定され、クラウニング11a1 の曲率半径R1=600mm,クラウニング21a1 のR2=500mmに設定されている。
【0031】
さらに、最大プーリ比のミスアライメントの絶対値が最小プーリ比のミスアライメントの絶対値よりも小さくなるように、プライマリプーリ11の固定シーブ11aとセカンダリプーリ21の固定シーブ21aの軸方向距離L(図2参照)が設定されている。固定シーブ11a,21aの軸方向距離Lは上述のシム35、36によって設定されている。
【0032】
上述のようなミスアライメント設定にできる理由を図5を参照しながら説明する。図5は、クラウニングを誇張して示したプーリの断面図であり、ここでは直線状の円錐面としている。(a)は最大プーリ比、(b)は最小プーリ比を示す。(a)に示す最大プーリ比状態では、プライマリプーリ11に対するチェーン40の巻き掛け径は最小、セカンダリプーリ21に対するチェーン40の巻き掛け径は最大である。このとき、チェーン40はプライマリプーリ11のクラウニング11a1 とセカンダリプーリ21のクラウニング21a1 とに接触するため、矢印で示すようにプライマリプーリ11側についてはチェーン40は固定シーブ11a側へ偏位し、セカンダリプーリ21側についてはチェーン40は固定シーブ21a側へ偏位する。この時のミスアライメント量Sがほぼ0になるように、固定シーブ11a,21aの軸方向距離Lを設定する。一方、(b)に示す最小プーリ比状態では、プライマリプーリ11に対するチェーン40の巻き掛け径は最大、セカンダリプーリ21に対するチェーン40の巻き掛け径は最小である。このとき、チェーン40はプライマリプーリ11のクラウニング11a1 にもセカンダリプーリ21のクラウニング21a1 にも接触しない。上述のように固定シーブ11a、21aの軸方向距離Lは最大プーリ比においてミスアライメント量Sが0近傍になるように設定されているので、最小プーリ比では必然的にミスアライメント量Sは正の大きな値をとる。本実施例では、以下のようなミスアライメント量に設定した。
【0033】
【表1】
【0034】
図6は、表1に示すミスアライメント設定をプーリ比との関係で示したものである。円錐シーブとはクラウニングのないシーブ面を有する場合であり、両側クラウニングとはプライマリプーリとセカンダリプーリの両方にクラウニングを形成した場合であり、片側クラウニングとはプライマリプーリとセカンダリプーリの一方にクラウニングを形成した場合である。図6からわかるように、円錐シーブでは、プーリ比γ(γ>1)のミスアライメントとプーリ比1/γのミスアライメントとが等しいが、片側クラウニング及び両側クラウニングでは、プーリ比1/γのミスアライメントがプーリ比γのミスアライメントより大きいので、暗騒音が小さい最小プーリ比での減速時において、耳障りになるチェーン騒音を効果的に低減できる。また、プーリ比γのミスアライメントがプーリ比1/γのミスアライメントより小さいので、入力トルクの大きな発進時や加速時のような最大プーリ比でのチェーン負荷を軽減でき、耐久性の向上を実現できる。特に、両側クラウニングの場合には、中間プーリ比及び最大プーリ比でのミスアライメントをほぼ0にできるので、伝達効率がよい無段変速機を実現できる。
【0035】
図6の両側クラウニング及び/又は片側クラウニングの特性は、プーリ比γが1より大きな全領域で、プーリ比1/γにおけるミスアライメントより小さくなる特性としたが、これに限るものではなく、破線で示すように、γが1より大きな所定値以上の領域において、プーリ比1/γにおけるミスアライメントより小さくなる特性としてもよい。
【0036】
図6では、両側クラウニングにおいて最大プーリ比を0近傍としたが、必ずしも0近傍である必要はなく、正の値又は負の値をとってもよい。また、中間プーリ比におけるミスアライメントを0近傍としたが、例えば図8と同様に中間プーリ比におけるミスアライメントが負の値をとってもよい。いずれにしても、最大プーリ比のミスアライメントの絶対値を最小プーリ比のミスアライメントの絶対値よりも小さくすることで、最小プーリ比でのチェーン騒音の低減と、最大プーリ比でのチェーン強度の向上とを両立できる。
【0037】
チェーン式無段変速機の場合、チェーン騒音には、ピン次数音とジャー音と呼ばれる音とがある。このうち、ピン次数音はピンとシーブ面との接触により発生する音であり、車速の変化につれて各次数音の周波数も変化する。一方、ジャー音はピン次数音とは異なり、低車速から高車速に至るまでほぼ一定した周波数成分(例えば2500〜4000Hz)を持つ騒音である。本発明者らが検討したところ、このジャー音は、図7に示すように、減速時の挟圧力(セカンダリプーリによるチェーンのクランプ力)が低い領域(High)で顕著に発生することが判明した。ジャー音は加速時にも発生していると考えられるが、加速時は暗騒音が高いので、ジャー音は目立たないのに対し、減速時は暗騒音が低いため、乗員にとって特に耳障りな騒音になる。挟圧力が低いHighでの減速時に、本発明のようなミスアライメントの設定によって、ジャー音を効果的に低減できる。
【0038】
本発明に係る無段変速機は前記実施例に限定されるものではない。チェーンとしては図3の構造に限らず、複数のリンクとこれらを連結する複数のピンとを有し、ピンの端面がシーブ面に接触するチェーンであれば、任意のものを使用できる。
【符号の説明】
【0039】
1 エンジン出力軸
3 入力軸
5 変速機ケース
9 無段変速装置
10 プライマリ軸
11 プライマリプーリ
11a 固定シーブ
11a1 クラウニング
11b 可動シーブ
20 セカンダリ軸
21 セカンダリプーリ
21a 固定シーブ
21a1 クラウニング
21b 可動シーブ
14,16,25,26 ボールベアリング
35 第1シム
36 第2シム
40 チェーン
41 リンク
42 ピン
51 リヤカバー
53 トランスミッションケース
【特許請求の範囲】
【請求項1】
プライマリプーリとセカンダリプーリとの間に複数のリンクとこれらを連結する複数のピンとを有するチェーンを巻き掛けてなり、
前記プライマリプーリはプライマリ軸に固定された固定シーブとプライマリ軸上に軸方向移動可能に支持された可動シーブとを備え、
前記セカンダリプーリはセカンダリ軸に固定された固定シーブとセカンダリ軸上に軸方向移動可能に支持された可動シーブとを備え、
前記プライマリプーリの固定シーブと前記セカンダリプーリの固定シーブとが前記チェーンを間にして軸方向反対側に配置されたチェーン式無段変速機において、
前記プライマリプーリの固定シーブと可動シーブのシーブ面間の中心位置と前記セカンダリプーリの固定シーブと可動シーブのシーブ面間の中心位置との軸方向距離をミスアライメントとしたとき、
プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、前記プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及び前記セカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定したことを特徴とする、チェーン式無段変速機。
【請求項1】
プライマリプーリとセカンダリプーリとの間に複数のリンクとこれらを連結する複数のピンとを有するチェーンを巻き掛けてなり、
前記プライマリプーリはプライマリ軸に固定された固定シーブとプライマリ軸上に軸方向移動可能に支持された可動シーブとを備え、
前記セカンダリプーリはセカンダリ軸に固定された固定シーブとセカンダリ軸上に軸方向移動可能に支持された可動シーブとを備え、
前記プライマリプーリの固定シーブと前記セカンダリプーリの固定シーブとが前記チェーンを間にして軸方向反対側に配置されたチェーン式無段変速機において、
前記プライマリプーリの固定シーブと可動シーブのシーブ面間の中心位置と前記セカンダリプーリの固定シーブと可動シーブのシーブ面間の中心位置との軸方向距離をミスアライメントとしたとき、
プーリ比γ(γ>1)のミスアライメントの絶対値がプーリ比1/γのミスアライメントの絶対値よりも小さくなるように、前記プライマリプーリの固定シーブのシーブ面の半径方向内側領域、及び前記セカンダリプーリの固定シーブのシーブ面の半径方向外側領域の少なくとも一方にクラウニングを形成し、かつプライマリプーリの固定シーブとセカンダリプーリの固定シーブの軸方向距離を設定したことを特徴とする、チェーン式無段変速機。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−190823(P2011−190823A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−54970(P2010−54970)
【出願日】平成22年3月11日(2010.3.11)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月11日(2010.3.11)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]