
チェーン状態判定装置
【課題】巻掛け伝動機構のチェーンの伸び状態を判定可能なチェーン状態判定装置において、チェーンの伸び状態の判定の容易化、およびチェーン状態判定装置を適用可能な巻掛け伝動機構の範囲の拡大を図る。
【解決手段】チェーン状態判定装置50は、駆動スプロケットが設けられた駆動軸の回転角θを検出する回転角検出手段42と、駆動軸の回転速度Nを検出する回転速度検出手段43と、チェーンの伸びに起因して回転角信号S1に現れる特定信号の周波数を決定する周波数決定手段51と、回転角信号S1に基づくサンプル信号S2から前記周波数の信号をフィルタ手段53で抽出した抽出信号S3に基づいてチェーンの伸び状態の指標となる伸び指標値Hを算出する指標値算出手段54と、伸び状態判定閾値Lを算出する判定閾値算出手段55と、伸び指標値Hと伸び状態判定閾値Lとを比較して伸び状態を判定する伸び状態判定手段56とを備える。
【解決手段】チェーン状態判定装置50は、駆動スプロケットが設けられた駆動軸の回転角θを検出する回転角検出手段42と、駆動軸の回転速度Nを検出する回転速度検出手段43と、チェーンの伸びに起因して回転角信号S1に現れる特定信号の周波数を決定する周波数決定手段51と、回転角信号S1に基づくサンプル信号S2から前記周波数の信号をフィルタ手段53で抽出した抽出信号S3に基づいてチェーンの伸び状態の指標となる伸び指標値Hを算出する指標値算出手段54と、伸び状態判定閾値Lを算出する判定閾値算出手段55と、伸び指標値Hと伸び状態判定閾値Lとを比較して伸び状態を判定する伸び状態判定手段56とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動スプロケットと被動スプロケットとに掛け渡されたチェーンを備えるチェーン式巻掛け伝動機構を備える機械に関し、より詳細には、チェーンに伸びが発生したときの伸び状態を判定するチェーン状態判定装置に関する。そして、前記機械は、例えば内燃機関である。
【背景技術】
【0002】
駆動スプロケットと被動スプロケットとに掛け渡されたチェーンを備える巻掛け伝動機構を備える機械において、該機械の振動を検出するセンサの検出信号に基づいて、チェーンの摩耗やスプロケットの破損などに起因する異常を診断することは知られている(例えば、特許文献1参照)。
また、動弁装置を駆動するチェーン式巻掛け伝動機構を備える内燃機関において、筒内圧を検出するセンサの検出信号に基づいてチェーンに伸びが生じたか否かを判定することも知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−115635号公報
【特許文献2】特許4228664号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
チェーン式巻掛け伝動機構を備える機械、例えば内燃機関において、内燃機関の運転中に、該巻掛け伝動機構のチェーンの摩耗等に起因してチェーンの伸びが発生したとき、該伸びが正常な範囲であるか、または異常であるかを判定するために、内燃機関の振動を検出する手法では、例えば該振動に基づいて検出された異常がチェーンの伸びに起因する異常であると直ちに特定することは困難である。
また、内燃機関においてチェーンの伸びを筒内圧に基づいて検出する場合、燃焼状態に直接依存する筒内圧の変化に、したがって燃焼に、直接関与する作動装置(例えば動弁装置)以外の作動装置を駆動させる巻掛け伝動機構のチェーンの伸び状態を検出することができないので、その適用範囲が制限される。
さらに、前記した技術では、1つの駆動軸により駆動される複数のチェーン式巻掛け伝動機構が備えられる場合、複数のチェーンのそれぞれの伸び状態を判定することは困難である。
【0005】
本発明は、このような事情に鑑みてなされたものであり、チェーン式巻掛け伝動機構を備える機械の運転中に、該巻掛け伝動機構のチェーンの伸び状態を判定可能なチェーン状態判定装置において、チェーンの伸び状態の判定の容易化を図ると共に、チェーン状態判定装置を適用可能な巻掛け伝動機構の範囲の拡大を図ることを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載の発明は、駆動軸(10)に設けられた駆動スプロケット(20)と被動軸(11,12)に設けられた被動スプロケット(21)とに掛け渡されたチェーン(22)とを備える少なくとも1つの巻掛け伝動機構(T)を備える機械(E)における前記チェーン(22)の伸び状態を判定するチェーン状態判定装置において、前記駆動軸(10)または前記被動軸(11,12)の一方である基準回転軸の回転角(θ)を検出する回転角検出手段(42)と、前記基準回転軸の回転速度(N)を検出する回転速度検出手段(43)と、前記チェーン(22)の伸びに起因して前記回転角検出手段(42)が出力する回転角信号(S1)に現れる特定信号(S1e)の周波数である判定用周波数(F)を、任意の前記回転速度(N)である判定用回転速度(Nf)での周波数として前記回転速度(N)に基づいて決定する周波数決定手段(51)と、前記回転角信号(S1)に基づく判定対象信号から前記判定用周波数(F)の信号を抽出信号(S3)として抽出するフィルタ手段(53)と、前記抽出信号(S3)に基づいて前記チェーン(22)の伸び状態の指標となる伸び指標値(H)を算出する指標値算出手段(54)と、伸び状態判定閾値(L)を前記判定用回転速度(Nf)に基づいて算出する判定閾値算出手段(55)と、前記伸び指標値(H)と前記伸び状態判定閾値(L)とを比較して前記伸び状態を判定する伸び状態判定手段(56)とを備えるチェーン状態判定装置である。
【0007】
これによれば、チェーン式巻掛け伝動機構が備えるチェーンの伸びに起因して基準回転軸の回転角信号に現れる特定信号から得られる判定用周波数を利用して、機械の運転中にチェーンの伸び状態が判定される。この結果、伸び状態が異常である場合を含めて伸びが発生したチェーンを特定できる。また、巻掛け伝動機構により作動する作動装置の種類に依存することなく、チェーンの伸び状態を判定でき、さらに、共通の駆動軸に設けられた複数の駆動スプロケットをそれぞれ備える複数の巻掛け伝動機構についても、チェーン毎の伸び状態の判定が可能になるので、チェーン状態判定装置の適用範囲を拡大できる。
さらに、伸び指標値は、基準回転軸の回転角信号および回転速度から得られ、しかも判定用周波数は任意の回転速度に対応して決定されるので、機械の運転中でのチェーンの伸び状態の判定が容易になる。
【0008】
請求項2記載の発明は、請求項1記載のチェーン状態判定装置において、前記回転角信号(S1)の大きさを一定の時間間隔(T1)毎に検出してサンプル信号(S2m)を出力する信号収集手段(52)を備え、前記判定対象信号は前記サンプル信号(S2m)であるものである。
これによれば、チェーンの伸びに起因する特定信号が現れる回転角信号を一定の時間間隔での信号の大きさに加工したサンプル信号から判定用周波数の抽出信号を得るので、回転角信号自体からフィルタ手段により抽出信号を得る場合に比べてチェーン状態判定装置の演算負荷を低減でき、その結果としてフィルタ手段による判定用周波数の抽出信号の生成が容易になる。
【0009】
請求項3記載の発明は、請求項1記載のチェーン状態判定装置において、前記回転角信号(S1)の大きさが一定の所定値(M)となる時間間隔(T2)を検出してサンプル信号(S2t)を出力する信号収集手段(52)を備え、前記判定対象信号は前記サンプル信号(S2t)であるものである。
これによれば、伸びに起因する特定信号が現れる回転角信号をその大きさが一定となるときの時間間隔に加工したサンプル信号から、判定用周波数の抽出信号を得るので、回転角信号自体からフィルタ手段により抽出信号を得る場合に比べてチェーン状態判定装置の演算負荷を低減でき、その結果としてフィルタ手段による判定用周波数の抽出信号の生成が容易になる。
【0010】
請求項4記載の発明は、請求項1から3のいずれか1項記載のチェーン状態判定装置において、前記回転速度をN、前記チェーン(22)の駒(32)の数をA、前記基準回転軸に設けられた前記駆動スプロケット(20)または前記被動スプロケット(21)の歯(30,31)の数をBとするとき、前記判定用周波数Fは、次式
F=(N/60)*(B/A)
により算出されるものである。
これによれば、伸び状態を検出する対象となるチェーンに固有な判定用周波数を利用すると共に、該判定用周波数は巻掛け伝動機構の構成部品の構造から簡単に算出できる。この結果、巻掛け伝動機構の構造に基づいて、チェーンの伸び状態の判定が容易になり、しかも、複数の巻掛け伝動機構の場合に、伸びが発生したチェーンの特定が容易になる。
【0011】
請求項5記載の発明は、請求項1から4のいずれか1項記載のチェーン状態判定装置において、伸び指標値(H)は、前記抽出信号(S3)の大きさの絶対値に基づく特性値を積算した積算値(Si)であるものである。
これによれば、伸び状態判定閾値と比較される伸び指標値が、抽出信号の絶対値に基づく特性値から算出された正の値となるので、伸び状態判定閾値の設定が容易になる。
【0012】
請求項6記載の発明は、請求項1から5のいずれか1項記載のチェーン状態判定装置において、前記伸び状態判定閾値(L)は、前記伸び状態の異常を判定するための異常判定閾値(La)であり、前記伸び状態判定手段(56)により前記伸び状態が異常であると判定されたときに異常を報知する警告手段(57a)を備えるものである。
これによれば、伸び状態が異常であるときには警告手段により異常が報知されることから、チェーンの伸び状態の異常を直ちに認識することができるので、チェーンの異常状態での機械の運転継続を防止する契機となる。
【0013】
請求項7記載の発明は、請求項1から6のいずれか1項記載のチェーン状態判定装置において、前記基準回転軸は、1つの前記駆動軸(10)であり、前記巻掛け伝動機構(T)は、前記1つの駆動軸(10)を共通の駆動軸とした第1巻掛け伝動機構および第2巻掛け伝動機構であり、前記チェーン(22)は、前記第1巻掛け伝動機構が備える第1チェーンおよび前記第2巻掛け伝動機構が備える第2チェーンであり、前記駆動スプロケット(20)は、前記第1巻掛け伝動機構が備える第1駆動スプロケットおよび前記第2巻掛け伝動機構が備える第2駆動スプロケットであり、前記被動軸(11,12)は、前記第1巻掛け伝動機構が備える第1被動軸および前記第2巻掛け伝動機構が備える第2被動軸であり、前記被動スプロケット(21)は、前記第1巻掛け伝動機構が備える第1被動スプロケットおよび前記第2巻掛け伝動機構が備える第2被動スプロケットであるものである。
これによれば、共通の駆動軸に設けられた第1,第2駆動スプロケットをそれぞれ備える第1,第2巻掛け伝動機構についても、第1,第2巻掛け伝動機構が同時に作動している状態で、各巻掛け伝動機構のチェーンの伸び状態を容易に判定できる。
【発明の効果】
【0014】
本発明によれば、チェーン式巻掛け伝動機構を備える機械の運転中に、該巻掛け伝動機構のチェーンの伸び状態を判定可能なチェーン状態判定装置において、チェーンの伸び状態の判定を容易化できると共に、チェーン状態判定装置を適用可能な巻掛け伝動機構の範囲を拡大できる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態を示し、チェーン状態判定装置を備える内燃機関の模式図である。
【図2】図1の内燃機関の巻掛け伝動機構のチェーンの要部断面図である。
【図3】図1のチェーン状態判定装置を中心としたブロック図である。
【図4】図1のチェーン状態判定装置の回転角検出手段が出力する回転角信号から、信号収集手段によるサンプル信号の生成を説明する模式図である。
【図5】図1のチェーン状態判定装置のフィルタ手段によるサンプル信号からの判定用周波数の抽出信号の抽出を説明する模式図である。
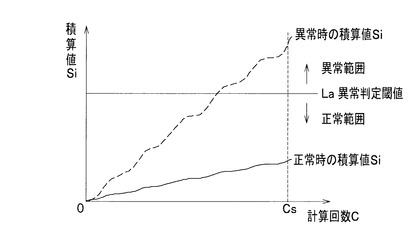
【図6】図1のチェーン状態判定装置の指標値算出手段による計算回数、積算値および異常判定閾値との関係を模式的に示すグラフである。
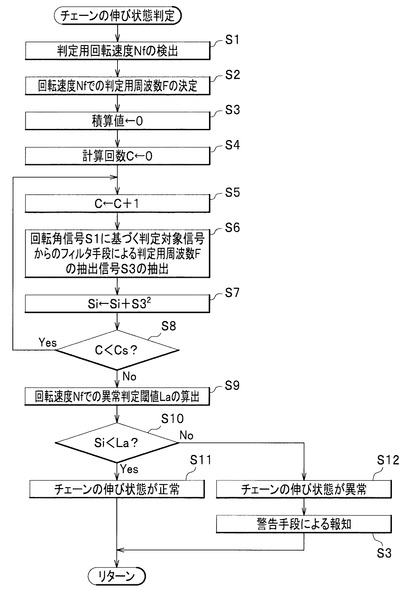
【図7】図1のチェーン状態判定装置によるチェーンの伸び状態の判定手順を説明するフローチャートである。
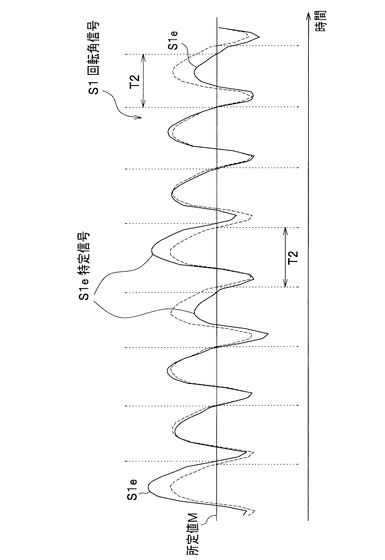
【図8】本発明の第2実施形態での信号収集手段によるサンプル信号の生成を説明する模式図であり、図4に対応する図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を図1〜図8を参照して説明する。
図1〜図7は、本発明の第1実施形態を説明するための図である。
図1に示される第1実施形態において、機械としての内燃機関Eは、単気筒または多気筒の、ここでは直列4気筒の4ストローク内燃機関であり、搭載対象である車両に搭載される。
【0017】
内燃機関Eは、ピストン(図示されず)が往復運動可能に嵌合するシリンダブロック1を備える本体としての機関本体と、該機関本体に回転可能に支持される駆動軸としてのクランク軸10および該クランク軸10により回転駆動される1以上の所定数の、ここでは複数としての2つの被動軸であるカム軸11およびバランサ軸12と、クランク軸10の動力をカム軸11およびバランサ軸12にそれぞれ伝達する前記所定数としての2つのチェーン式巻掛け伝動機構Ta,Tbと、内燃機関Eの運転を制御する制御装置としてのエンジン制御装置40と、各巻掛け伝動機構Ta,Tbのチェーン22a,22bの伸び状態を判定するチェーン状態判定装置50とを備える。
【0018】
前記機関本体は、シリンダブロック1と、シリンダブロック1に結合されたシリンダヘッド2と、シリンダヘッド2に結合されたヘッドカバー3と、シリンダヘッド2とは反対側でシリンダブロック1に結合されたロアブロック4と、ロアブロック4に結合されたオイルパン5とから構成される。
燃焼室で発生する燃焼ガスにより駆動されて往復運動する前記ピストンにより回転駆動されるクランク軸10は、シリンダブロック1におけるロアブロック4側部分1cとロアブロック4とに回転可能に支持される。また、前記部分1c、ロアブロック4およびオイルパン5は、クランク軸10およびバランサ装置8が収納されるクランク室6を形成するクランクケースを構成する。
【0019】
前記燃焼室に対する吸排気を制御する吸気弁および排気弁を開閉する動弁装置(図示されず)が備えるカム軸11は、シリンダヘッド2に回転可能に支持されて、該カム軸11に設けられたカムにより吸気弁および排気弁の開閉時期を規定する。
前記動弁装置を作動させる巻掛け伝動機構Taは、シリンダブロック1およびロアブロック4により支持されるクランク軸10の軸端部に設けられてクランク軸10と共に回転する駆動スプロケット20aと、カム軸11の軸端部に設けられてカム軸11と共に回転する被動スプロケット21aと、多数の歯30a,31aをそれぞれ有する両スプロケット20a,21aおよびアイドルスプロケット25に巻き掛けられた無端のチェーン22aとを備え、カム軸11を、クランク軸10の回転速度Nに対して所定の変速比である1/2倍の変速比で回転駆動する。
【0020】
前記ピストンの往復運動に起因して発生する2次振動を低減するバランサ装置8が備える1対の第1,第2バランサ軸12,13は、ロアブロック4に固定されて設けられるハウジング15に回転可能に支持され、したがって該ハウジング15を介してロアブロック4に回転可能に支持される。第1バランサ軸12は、互いに噛合する1対の歯車から構成される軸間伝動機構16を介して第2バランサ軸13を回転駆動し、それぞれバランスウエイト17が設けられた両バランサ軸12,13が、互いに等速で、逆方向に回転する。
【0021】
バランサ装置8を作動させる巻掛け伝動機構Tbは、クランク軸10の軸端部に設けられてクランク軸10と共に回転する駆動スプロケット20bと、第1バランサ軸12の軸端部に設けられて第1バランサ軸12と共に回転する被動スプロケット21bと、多数の歯30b,31bをそれぞれ有する両スプロケット20b,21bに巻き掛けられた無端のチェーン22bとを備え、両バランサ軸12,13をクランク軸10の回転速度Nに対して別の所定の変速比である2倍の変速比で回転駆動する。
【0022】
内燃機関Eが備える前記動弁装置およびバランサ装置8はいずれも作動装置であり、カム軸11は、被作動部材としての前記吸気弁および前記排気弁の開閉時期である作動時期を規定し、各バランサ軸12,13は、被作動部材としてのバランスウエイト17によるバランス力の発生時期である作動時期を規定する。
なお、以下の説明において、両巻掛け伝動機構Ta,Tbおよびその構成部材について、区別をしない場合、添え字「a」,「b」が付かない符号が使用される。そして、内燃機関Eは、少なくとも1つの巻掛け伝動機構Tを備える。
【0023】
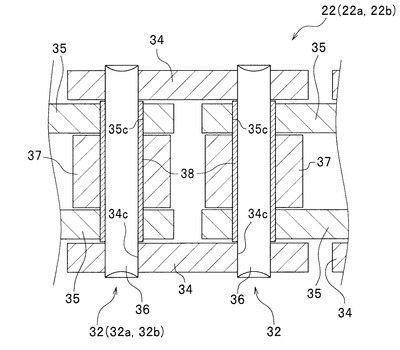
ローラチェーンである各チェーン22a,22bはいずれも多数の駒32a,32bから構成される同様の構造であり、図2に示されるように、第1リンクプレートとしての外側リンクプレート34と、第2リンクプレートとしての内側リンクプレート35と、両リンクプレート34,35を連結するリンクピン36と、リンクピン36に回転可能に支持されているローラ37と、さらにリンクピン36とローラ37および内側リンクプレート35との間に配置されたスリーブ38とを備える。
【0024】
ここで、チェーン22の駒32とは、チェーン22において、1つのリンクピン36と該1つのリンクピン36で結合された各リンクプレート34,35とで構成される部分であるとし、この実施形態では、該駒32には、さらに前記1つのリンクピン36に挿入されたスリーブ38が含まれる。したがって、チェーン22において、駒32の数はリンクピン36の数と一致し、各リンクプレート34,35は、チェーン22の走行方向で隣接する駒32と共有される。
【0025】
カム軸11および第1バランサ軸12において、一方が第1被動軸であるとき、他方は第2被動軸であるとする。また、いずれもタイミングチェーン機構である動弁用巻掛け伝動機構Taおよびバランサ用巻掛け伝動機構Tbにおいて、一方が第1巻掛け伝動機構であるとき、他方は第2巻掛け伝動機構であるとする。そして、両被動スプロケット20a,20bにおいて、一方が第1被動スプロケットであるとき、他方は第2被動スプロケットであるとする。
そして、両巻掛け伝動機構Ta,Tbに関して、両チェーン22a,22bの駒32a,32bの数は異なり、両駆動スプロケット20a,20bの歯30a,30bの数は異なる。
【0026】
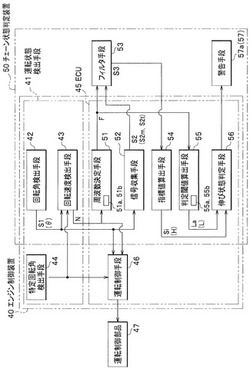
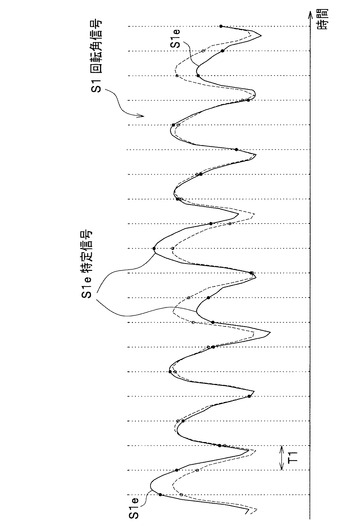
図3を参照すると、エンジン制御装置40は、内燃機関Eの運転状態を検出する運転状態検出手段41と、運転状態検出手段41の検出信号が入力されると共に該運転状態検出手段41により検出された各運転状態に基づいて内燃機関Eの作動状態としての運転状態を制御する運転制御部品47である燃料噴射弁等を制御する電子制御ユニット(以下、「ECU」という。)45とを備える。
内燃機関Eが備える運転制御部品47を制御する運転制御手段46を備えるECU45は、入出力インターフェース、中央演算処理装置、各種の制御プログラムなどが記憶されたROMおよび各種のデータなどが一時的に記憶されるRAMを有する記憶装置を備えるコンピュータである。そして、前記記憶装置には、後記する各種マップ51a,51b,55a,55bが格納されている。
【0027】
運転状態検出手段41は、基準回転軸としてのクランク軸10の回転角θであるクランク角を検出する回転角検出手段42と、回転角検出手段42により検出された回転角θに基づいてクランク軸10の回転速度Nをエンジン回転速度として検出する回転速度検出手段43と、クランク軸10の特定回転角として前記各ピストンの上死点位置を検出する特定回転角検出手段44とを含む。
【0028】
回転角検出手段42は、クランク軸10と一体に回転するパルサである被検出部と、パルサの回転方向に所定角度毎に等間隔に設けられた多数の突起の位置を磁束の変化を通じて検出してパルス状の検出信号を出力する検出部とを備える。別の例として、回転角検出手段42が、前記した磁気式検出手段のほかに、光学式検出手段で構成されてもよい。
回転速度Nは、回転角検出手段42により検出された回転角θに基づいて算出される角速度の複数の値の平均値、ここでは回転方向で隣接する前記上死点位置の間での複数の角速度の平均値として算出される。
【0029】
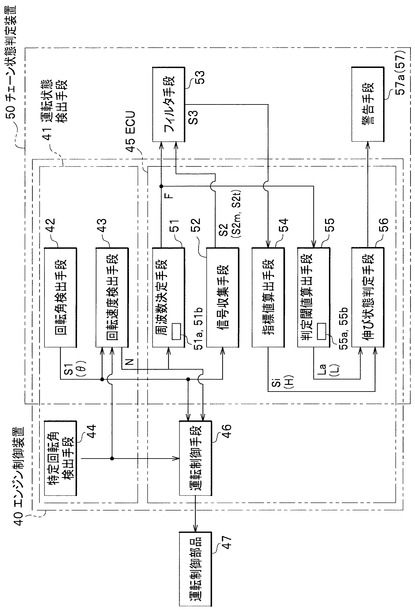
図3,図4を参照すると、チェーン状態判定装置50は、いずれも運転状態検出手段41である回転角検出手段42および回転速度検出手段43と、チェーン22の伸びに起因して回転角検出手段42が出力する検出信号としてのクランク角信号である回転角信号S1に現れる特定信号S1eの周波数である判定用周波数Fを回転速度Nに基づいて決定する周波数決定手段51と、回転角信号S1の大きさを一定の時間間隔T1毎に検出することによりサンプル信号S2としての振幅サンプル信号S2mを生成する振幅信号収集手段である信号収集手段52と、回転角信号S1に基づく判定対象信号としての振幅サンプル信号S2mから判定用周波数Fの信号を抽出信号S3として抽出する信号抽出手段としてのフィルタ手段53と、フィルタ手段53から出力された抽出信号S3に基づいてチェーン22の伸び状態(または伸び量)の指標となる伸び指標値Hを算出する指標値算出手段54と、周波数決定手段51が判定用周波数Fを決定するときの回転速度Nである判定用回転速度Nfに対応した伸び状態判定閾値Lとしての異常判定閾値Laを算出する判定閾値算出手段55と、伸び指標値Hと異常判定閾値Laとを比較してチェーン22の伸び状態を判定する伸び状態判定手段56と、チェーン22の伸び状態が特定の伸び状態にあることを報知する報知手段57としての警告手段57aとを備える。
【0030】
チェーン状態判定装置50は、運転者により操作される判定対象切換手段としてのスイッチ(図示されず)により、伸び状態の判定対象となるチェーン22を、巻掛け伝動機構T単位で切り換えることができる。それゆえ、チェーン状態判定装置50は、各チェーン22a,22bの伸び状態を判定できる。
【0031】
周波数決定手段51、信号収集手段52、指標値算出手段54、判定閾値算出手段55、および伸び状態判定手段56は、ECU45にその機能として備えられるが、ECU45とは別の電子制御ユニットに備えられてもよい。
この実施形態では、伸び状態判定手段56は、チェーン22の伸び状態が、正常な範囲にあるか、該正常範囲から外れて異常の範囲にあるかを判定し、また伸び状態判定手段56により作動させられる警告手段57a(例えば、ランプなどの表示手段)は、チェーン22の伸び状態が異常の範囲にあることを報知する、すなわちチェーン22の伸びの異常を報知する。
【0032】
図2を参照すると、チェーン22の伸びは、チェーン22において接触部であるリンクピン36、スリーブ38、外側リンクプレート34におけるリンクピン36の挿入部34c、内側リンクプレート35におけるリンクピン36およびスリーブ38の挿入部35cが摩耗して隙間(以下、「チェーン隙間」という。)が形成されることで発生する。
【0033】
図1,図3を参照すると、周波数決定手段51は、チェーン22の伸び状態を判定するための判定用周波数Fを、任意の回転速度Nである判定用回転速度Nfでの周波数として、回転速度Nに基づいて決定する。
具体的には、ECU45には、巻掛け伝動機構Ta,Tb毎に、回転速度Nに対応する判定用周波数Fが設定された巻掛け伝動機構Ta用の周波数マップ51aまたは巻掛け伝動機構Tb用の周波数マップ51bが記憶されている。そして、周波数決定手段51は、伸び状態の判定対象となるチェーン22a,22bを備える巻掛け伝動機構Ta,Tbに対応して、回転速度検出手段43により検出された回転速度Nに基づいて周波数マップ51a,51bを検索することにより、判定用回転速度Nfに対応する判定用周波数Fを決定する。別の例として、周波数マップ51a,51bを作成することなく、判定用周波数Fが後記の計算式である式(1)により、回転速度Nに基づいて算出されてもよい。
このように、周波数決定手段51により、チェーン22の伸び状態の判定が行われる任意の回転速度Nを判定用回転速度Nfとしたときの判定用周波数Fが決定される。
【0034】
一方、チェーン22の伸びは、チェーン22を構成する各駒32の伸びの合計値であることから、1つずつの駒32の伸びに起因する現象を、チェーン22のすべての駒32に関して収集することで、チェーン22の伸び状態を検出することができる。
具体的には、各駒32が駆動スプロケット20と係合する(または、噛合する)ときに、伸びがほとんどない正常な駒32とは異なり、伸びが生じた駒32には、前記チェーン隙間が形成されているために、伸びが生じた駒32と係合する駆動スプロケット20に作用する負荷の変化に起因するクランク軸10の角速度の変化が発生し、この角速度変化が、回転角検出手段42の検出信号である回転角信号S1に現れる。
したがって、1つずつの駒32の伸びに起因する現象は、特定信号S1e(図4参照)として、回転角信号S1に現れ、この特定信号S1eを解析または加工することにより、チェーン22の伸び状態を検出することができる。
【0035】
そして、判定用周波数Fは、例えば、チェーン22の駒32の1つに伸びが発生したときに、該駒32の伸びに基づいて発生する特定信号S1eの周波数として、次式で算出される。
F=(N/60)*(B/A) (1)
ここで、
N:回転速度
A:チェーン22の駒32の数
B:基準回転軸(この実施形態では、クランク軸10である。)に設けられたス
プロケット(この実施形態では、駆動スプロケット20である。)の歯30
の数
である。
【0036】
このように、判定用周波数Fは、クランク軸10(基準回転軸)の回転速度N、駆動スプロケット20(基準回転軸に設けられたスプロケット)およびチェーン22に基づいて定まる周波数であり、同一回転速度Nにおいて各巻掛け伝動機構Ta,Tbに固有の周波数である。
【0037】
図4を併せて参照すると、信号収集手段52は、この特定信号S1eを含む回転角信号S1からチェーン22a,22bの伸び状態の判定に使用される判定対象信号である振幅サンプル信号S2mを生成するために、回転角信号S1において、一定の時間間隔T1毎に、回転角信号S1の大きさを、所定の信号収集時間に渡って検出し、かつ時系列に収集して、振幅サンプル信号S2mを出力する。
なお、図4において、チェーン22に伸びが殆ど発生していないチェーン状態であるチェーン正常時の回転角信号S1が破線で示され、前記チェーン隙間に起因するチェーン22の伸びが発生したときのチェーン状態であるチェーン伸び時、図示の例では後記許容範囲を超える伸びが発生したときの回転角信号S1が実線で示されている。
そして、図5には、前記チェーン正常時の振幅サンプル信号S2mおよび前記チェーン伸び時の振幅サンプル信号S2mが示されている。
【0038】
ここで、時間間隔T1は、例えば判定用周波数Fの関数として、サンプリング定理を満たすように次式により設定される。
T1<1/(2F) (2)
また、前記信号収集時間は、回転角信号S1の大きさに関連する信号である振幅サンプル信号S2mがチェーン22の伸びを検出するための信頼性のあるデータとなるように設定されると共に、回転速度Nと関連して、該回転速度Nが大きいほど短く設定される。例えば、回転速度Nが800rpmであるとき、信号収集時間は5秒程度である。
【0039】
バンドパスフィルタにより構成されるフィルタ手段53は、この実施形態では複数の異なる周波数の通過を許容する1以上の可変周波数バンドパスフィルタまたは1以上の、ここでは複数の固定周波数バンドパスフィルタにより構成される。
フィルタ手段53は、入力された振幅サンプル信号S2mのうち、判定用周波数Fの信号を通過させて、該通過信号を抽出信号S3として出力する。前記チェーン正常時の振幅サンプル信号S2mには判定用周波数Fの信号成分が殆ど含まれていないため、抽出信号S3は、図5に示されるように、振幅が0(ゼロ)付近の信号となる一方で、前記チェーン伸び時の振幅サンプル信号S2mには判定用周波数Fの信号成分が含まれているため、抽出信号S3は、チェーン正常時に比べて大きな振幅の信号となる。そして、抽出信号S3の振幅は、チェーン22の伸びが大きくなるほど大きくなる。
【0040】
指標値算出手段54は、抽出信号S3の大きさの絶対値に基づく特性値、この実施形態では抽出信号S3の大きさを2乗した値である特性値を求め、該特性値を所定の計算回数Cだけ積算した積算値Siを伸び指標値Hとして算出する。
計算回数Cは、異常時での抽出信号S3の積算値Siの変動幅が、正常時での積算値Siの変動幅と重なることなく、正常時の積算値Siと異常時の積算値Siとが明確に分離されるように、シミュレーション等により予め設定される。この計算回数Cは、例えば4000回である。
【0041】
判定閾値算出手段55は、チェーン22の伸び状態の判定基準となる伸び状態判定閾値Lとしての異常判定閾値Laを判定用回転速度Nf毎に算出する。具体的には、ECU45には、伝動機構Ta,Tb毎に、回転速度Nに対応する異常判定閾値Laが設定された閾値マップ55a,55bが記憶されている。そして、判定閾値算出手段55は、伸び状態の判定対象となるチェーン22a,22bを備える巻掛け伝動機構Ta,Tbに対応して、回転速度Nに基づいて巻掛け伝動機構Ta用の閾値マップ55aまたは巻掛け伝動機構Tb用の閾値マップ55bを検索することにより、判定用回転速度Nfに対応する異常判定閾値Laを算出する。
【0042】
伸び状態判定手段56は、図6に示されるように、積算値Siと異常判定閾値Laとを比較して、積算値Siの全体が、異常判定閾値Laを境に、正常の範囲にあるとき、チェーン22の伸びが正常であると判定し、異常の範囲にあるとき、チェーン22の伸びが異常であると判定する。
【0043】
必要に応じて図3を参照しながら図7を参照して、チェーン状態判定装置50により実行されるチェーン22の伸び状態の判定方法を説明する。
ステップS1では、チェーン22の伸び状態の判定を開始する際のクランク軸10の回転速度Nが、判定用回転速度Nfとして検出される。その後、ステップS2で、周波数決定手段51により、周波数マップ51a,51bから判定用回転速度Nfに対応する判定用周波数Fが決定される。次いで、ステップS3で、伸び指標値Hである積算値Siがリセットされて初期値としての0に設定され、ステップS4で、積算値Siを算出するための計算回数Cがリセットされて0にされた後、ステップS5で、今までカウントされた計算回数Cに1を加算して今回の計算回数Cを算出する。
【0044】
次いで、ステップS6で、回転角信号S1が読み込まれて、信号収集手段52により、時間間隔T1毎の回転角信号S1の大きさが前記所定信号収集時間に渡って検出され、かつ時系列に収集されて、振幅サンプル信号S2mが生成される。次いで、振幅サンプル信号S2mが判定用周波数Fの信号を通過させるフィルタ手段53に入力されて、抽出信号S3が抽出される。
【0045】
その後、ステップS7で、抽出信号S3の大きさの2乗が今までの積算値Siに加算されて最新の積算値Siが算出された後、ステップS8で、計算回数Cが予め設定された所定回数Csに達したか否かが判定される。計算回数Cが所定回数Csに達していないときは、ステップS5〜ステップS8までの処理が繰り返し実行されて、計算回数Cが所定回数Csになるまで積算される。
このように、ステップS5〜ステップS8において、抽出信号S3の2乗を特性値として算出し、該特性値を所定回数Csだけ加算して積算値Siを算出する処理は、指標値算出手段54により行われる。
そして、計算回数Cが所定回数Csに達したとき、ステップS9で、判定閾値算出手段55により、閾値マップ55a,55bから判定用回転速度Nfに対応する異常判定閾値Laが算出された後、ステップS10で積算値Siと異常判定閾値Laとが比較される。
【0046】
ステップS10で、積算値Siが異常判定閾値La未満であるとき、ステップS11で、伸び状態判定手段56により伸び状態が正常の範囲にある、すなわちチェーン22の伸びが予め設定された許容範囲であると判定される。また、ステップS10で、積算値Siが異常判定閾値La以上であるとき、ステップS12で伸び状態判定手段56により伸び状態が異常である、すなわちチェーン22の伸びが前記許容範囲を超えると判定されて、ステップS13で警告手段57aが警告を発生して、運転者にその異常を知らせる。
【0047】
ここで、チェーン状態判定装置50によるチェーン22の伸び状態の判定は、クランク軸10または駆動スプロケット20が実質的に同一の回転速度N(すなわち、判定用回転速度Nf)であるときに実行され、特に、ステップS5からステップS8までの一連の処理は、回転速度Nが実質的に判定用回転速度Nfであるときに実行される。
ここで、「実質的に同一」とは、回転速度Nが同一である場合のほかに、チェーン状態判定装置50によるチェーン22の伸び状態の判定に関して所要の信頼性が維持できる程度に、回転速度Nが変化してもよいことを意味する。
【0048】
次に、前述のように構成された実施形態の作用および効果について説明する。
チェーン式巻掛け伝動機構Tを備える内燃機関Eにおけるチェーン22の伸び状態を判定するチェーン状態判定装置50は、チェーン22の伸びに起因して回転角検出手段42が出力する回転角信号S1に現れる特定信号S1eの周波数である判定用周波数Fを、任意の回転速度Nである判定用回転速度Nfでの周波数として回転速度Nに基づいて決定する周波数決定手段51と、回転角信号S1に基づく判定対象信号である振幅サンプル信号S2mから判定用周波数Fの信号を抽出信号S3として抽出するフィルタ手段53と、抽出信号S3に基づいてチェーン22a,22bの伸び状態の指標となる伸び指標値Hを算出する指標値算出手段54と、伸び状態判定閾値Lを判定用回転速度Nfに基づいて算出する判定閾値算出手段55と、伸び指標値Hと伸び状態判定閾値Lとを比較してチェーン22の伸び状態を判定する伸び状態判定手56とを備える。
この構造により、巻掛け伝動機構Tが備えるチェーン22の伸びに起因してクランク軸10の回転角信号S1に現れる特定信号S1eから得られる判定用周波数Fを利用して、内燃機関Eの運転中にチェーン22の伸び状態が判定される。この結果、伸び状態が異常である場合を含めて伸びが発生したチェーン22を特定できる。また、巻掛け伝動機構Tにより作動する作動装置の種類、ここでは前記動弁装置およびバランサ装置8に依存することなく、チェーン22の伸び状態を判定でき、さらに、共通のクランク軸10に設けられた駆動スプロケット20a,20bをそれぞれ備える複数の巻掛け伝動機構Ta,Tbについて、チェーン22a,22b毎の伸び状態の判定が可能になるので、チェーン状態判定装置50の適用範囲を拡大できる。
さらに、伸び指標値Hは、クランク軸10の回転角信号S1および回転速度Nから得られ、しかも判定用周波数Fは任意の回転速度Nに対応して決定されるので、内燃機関Eの運転中でのチェーン22の伸び状態の判定が容易になる。
【0049】
さらに、回転角検出手段42、回転速度検出手段43およびECU45は、内燃機関Eの運転に必須のエンジン制御装置40が備えるものを利用するので、チェーン状態判定装置50に専用の回転角検出手段および回転速度検出手段が不要になって、チェーン状態判定装置50のコストを削減できる。
また、判定用周波数Fを変更することにより、任意の回転速度Nでチェーン状態の判定が可能であり、さらに駒32の数が異なるチェーン22a,22bを備える複数の伝動機構Ta,Tbにおけるチェーン状態の判定にも容易に適用できる。
【0050】
判定用周波数Fが、前記式(1)で算出されることにより、伸び状態を検出する対象となるチェーン22に固有な判定用周波数Fを利用すると共に、該判定用周波数Fは巻掛け伝動機構Tの構成部品の構造から簡単に算出できる。この結果、巻掛け伝動機構Tの構造に基づいて、チェーン22の伸び状態の判定が容易になり、しかも、複数の巻掛け伝動機構Ta,Tbの場合に、伸びが発生したチェーン22a,22bの特定が容易になる。
【0051】
回転角信号S1の大きさを一定の時間間隔T1毎に検出して振幅サンプル信号S2mを出力する信号収集手段52を備え、前記判定対象信号は振幅サンプル信号S2mであることにより、チェーン22の伸びに起因する特定信号S1eが現れる回転角信号S1を一定の時間間隔T1での信号の大きさに加工した振幅サンプル信号S2mから判定用周波数Fの抽出信号S3を得るので、回転角信号S1自体からフィルタ手段53により抽出信号S3を得る場合に比べてチェーン状態判定装置50を構成するECU45の演算負荷を低減でき、その結果としてフィルタ手段53による判定用周波数Fの抽出信号S3の生成が容易になる。
【0052】
伸び指標値Hは、抽出信号S3の大きさの絶対値に基づく特性値として抽出信号S3の2乗を積算した積算値Siであることにより、伸び状態判定閾値Lと比較される伸び指標値Hが、抽出信号S3の2乗に基づく特性値から算出された正の値となるので、伸び状態判定閾値Lの設定が容易になる。
【0053】
判定閾値算出手段55により算出される伸び状態判定閾値Lは、前記伸び状態の異常を判定するための異常判定閾値Laであり、チェーン状態判定装置50が伸び状態判定手段56により伸び状態が異常であると判定されたときに異常を報知する警告手段57aを備えることにより、伸び状態が異常であるときには警告手段57aにより異常が報知されることから、チェーン22の伸び状態の異常を直ちに認識することができるので、チェーン22の異常状態での内燃機関Eの運転継続を防止する契機となる。
【0054】
2つの巻掛け伝動機構Ta,Tbは、クランク軸10を共通の1つの駆動軸としていることにより、共通の駆動軸に設けられた駆動スプロケット20a,20bをそれぞれ備える両巻掛け伝動機構Ta,Tbについて、各巻掛け伝動機構Ta,Tbが同時に作動している状態で、各巻掛け伝動機構Ta,Tbのチェーン22a,22bの伸び状態を容易に判定できる。
【0055】
次に、一部に第2実施形態が示される図3と、図7,図8を参照して、本発明の第2実施形態を説明する。この第2実施形態は、第1実施形態とは、サンプル信号S2を出力する信号収集手段52が相違し、その他は基本的に同一の構成を有するものである。そのため、同一の部分についての説明は省略または簡略にし、異なる点を中心に説明する。
【0056】
第2実施形態において時間間隔信号収集手段である信号収集手段52は、図8に示されるように、回転角信号S1の大きさが一定の所定値Mとなる時間間隔T2を所定の信号収集時間に渡って検出して間隔時間サンプル信号S2t(図3参照)を生成する。
具体的には、信号収集手段52は、判定対象信号である間隔時間サンプル信号S2tを生成するために、図8に示されるように、回転角信号S1が増減方向で同じ方向(図8に示された例では減少方向)に変化するときの回転角信号S1の大きさが一定の所定値Mとなる時間間隔T2を、所定の信号収集時間に渡って検出し、かつ時系列に収集してサンプル信号S2としての間隔時間サンプル信号S2t(第1実施形態の振幅サンプル信号S2m(図4参照)に対応する。)を出力する。
【0057】
ここで、所定値Mは、チェーン22に伸びが殆どないときの回転角信号S1の振幅および特定信号S1eの振幅に依存して、チェーン22の伸び状態の変化に応じた特定信号S1eの振幅の変化を検出できる値に設定される。
また、前記信号収集時間は、例えば第1実施形態での信号収集時間と同様に設定される。
【0058】
そして、第1実施形態と同様に、フィルタ手段53は、入力された時間間隔サンプル信号S2tのうち、判定用周波数Fの信号を通過させる。このため、図5に示される第1実施形態の抽出信号S3と同様の抽出信号が、前記チェーン正常時および前記チェーン伸び時のそれぞれに対応して抽出される。
また、第2実施形態では、チェーン状態判定装置50によるチェーン22の伸び状態の判定方法は、ステップS6での処理を除いて同様である。第2実施形態では、図7のステップS6において、回転角信号S1が読み込まれて、信号収集手段52により、回転角信号S1の大きさが所定値Mとなる時間間隔T2が前記信号収集時間に渡って検出され、かつ時系列に収集されて、時間間隔サンプル信号S2tが生成され、次いで、該時間間隔サンプル信号S2tが判定用周波数Fの信号を通過させるフィルタ手段53に入力されて、抽出信号S3が抽出される。
【0059】
この第2実施形態によれば、判定対象信号の形成手段が異なることによる作用効果を除いて、第1実施形態と同様の作用効果が奏されるほか、次の作用効果が奏される。
回転角信号S1の大きさが一定の所定値Mとなる時間間隔T2を前記信号収集時間に渡って検出して時間間隔サンプル信号S2tを出力する信号収集手段52を備えることにより、伸びに起因する特定信号S1eが現れる回転角信号S1をその大きさが一定となるときの時間間隔T2に加工した時間間隔サンプル信号S2tから、判定用周波数Fの抽出信号S3を得るので、判定用周波数Fの抽出信号S3の生成に関して、第1実施形態と同様の効果が奏される。
【0060】
以下、前述した実施形態の一部の構成を変更した実施形態について、変更した構成に関して説明する。
チェーン状態判定装置50は、1つの巻掛け伝動機構のチェーンの伸び状態、または3以上の巻掛け伝動機構のチェーンの伸び状態を判定するものであってもよい。
チェーン状態判定装置50は信号収集手段52を備えることなく、前記判定対象信号が回転角信号S1自体であってもよい。
回転角検出手段42および回転速度検出手段43により回転角および回転速度Nが検出される基準回転軸は、駆動軸の代わりに被動軸であってもよい。この場合、判定用周波数Fを算出する式(1)のスプロケットは、被動スプロケットである。また、回転角検出手段42および回転速度検出手段43は、駆動スプロケットまたは被動スプロケットの回転角および回転角速度をそれぞれ検出するものであってもよい。
3以上のチェーン式巻掛け伝動機構が、1つの共通の駆動軸に設けられた3以上の駆動スプロケットをそれぞれ備えていてもよい。
【0061】
チェーン状態判定装置50は、この実施形態では、チェーン22の伸びが、正常の範囲であるか、または異常であるかを判定するものであったが、チェーン22の伸び状態が正常な範囲で、異常に至るまでの伸び状態を段階的に判定するものであってもよい。この場合、伸び状態判定閾値Lは、異常判定閾値Laよりも小さい複数の判定閾値が設定される。さらに、この場合に、報知手段57が設けられることなく、前記判定閾値が機関状態の制御に使用されてもよい。
報知手段57は、異常時の報知に加えて、チェーン22の伸び状態が正常であることを報知するものであってもよい。
【0062】
駆動軸は、複数の巻掛け伝動機構について、別々の軸であってもよい。
被動軸は、内燃機関Eにおいて、カム軸11、バランサ軸12以外の回転軸、例えば発電機、コンプレッサ、冷却水ポンプなどの補機の回転軸であってもよい。
抽出信号S3の大きさの絶対値に基づく特性値は、抽出信号S3の大きさの絶対値であってもよく、この場合にも特性値が抽出信号S3の2乗であるときと同様の効果が奏される。
【0063】
チェーンは、サイレントチェーンであってもよい。
内燃機関Eが搭載される対象は、車両以外のもの、例えば船外機等の船舶推進装置、または発電装置などの、作業用装置であってもよい。
機械は、内燃機関以外の、駆動軸および被動軸間で動力を伝達するチェーン式巻掛け伝動機構を備える機械、例えば電動モータなどの駆動モータにより駆動軸が回転駆動されるもの(一例として、搬送装置)であってもよい。
【符号の説明】
【0064】
10 クランク軸
11 カム軸
12 バランサ軸
20 駆動スプロケット
21 被動スプロケット
22 チェーン
42 回転角検出手段
43 回転速度検出手段
50 チェーン状態判定装置
51 周波数決定手段
52 信号収集手段
53 フィルタ手段
54 指標値算出手段
55 判定閾値算出手段
56 伸び状態判定手段
T 巻掛け伝動機構
Nf 判定用回転速度
S1 回転角信号
S1e 特定信号
S2 サンプル信号
S3 抽出信号
H 伸び指標値
Si 積算値
La 異常判定閾値
F 判定用周波数
【技術分野】
【0001】
本発明は、駆動スプロケットと被動スプロケットとに掛け渡されたチェーンを備えるチェーン式巻掛け伝動機構を備える機械に関し、より詳細には、チェーンに伸びが発生したときの伸び状態を判定するチェーン状態判定装置に関する。そして、前記機械は、例えば内燃機関である。
【背景技術】
【0002】
駆動スプロケットと被動スプロケットとに掛け渡されたチェーンを備える巻掛け伝動機構を備える機械において、該機械の振動を検出するセンサの検出信号に基づいて、チェーンの摩耗やスプロケットの破損などに起因する異常を診断することは知られている(例えば、特許文献1参照)。
また、動弁装置を駆動するチェーン式巻掛け伝動機構を備える内燃機関において、筒内圧を検出するセンサの検出信号に基づいてチェーンに伸びが生じたか否かを判定することも知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−115635号公報
【特許文献2】特許4228664号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
チェーン式巻掛け伝動機構を備える機械、例えば内燃機関において、内燃機関の運転中に、該巻掛け伝動機構のチェーンの摩耗等に起因してチェーンの伸びが発生したとき、該伸びが正常な範囲であるか、または異常であるかを判定するために、内燃機関の振動を検出する手法では、例えば該振動に基づいて検出された異常がチェーンの伸びに起因する異常であると直ちに特定することは困難である。
また、内燃機関においてチェーンの伸びを筒内圧に基づいて検出する場合、燃焼状態に直接依存する筒内圧の変化に、したがって燃焼に、直接関与する作動装置(例えば動弁装置)以外の作動装置を駆動させる巻掛け伝動機構のチェーンの伸び状態を検出することができないので、その適用範囲が制限される。
さらに、前記した技術では、1つの駆動軸により駆動される複数のチェーン式巻掛け伝動機構が備えられる場合、複数のチェーンのそれぞれの伸び状態を判定することは困難である。
【0005】
本発明は、このような事情に鑑みてなされたものであり、チェーン式巻掛け伝動機構を備える機械の運転中に、該巻掛け伝動機構のチェーンの伸び状態を判定可能なチェーン状態判定装置において、チェーンの伸び状態の判定の容易化を図ると共に、チェーン状態判定装置を適用可能な巻掛け伝動機構の範囲の拡大を図ることを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載の発明は、駆動軸(10)に設けられた駆動スプロケット(20)と被動軸(11,12)に設けられた被動スプロケット(21)とに掛け渡されたチェーン(22)とを備える少なくとも1つの巻掛け伝動機構(T)を備える機械(E)における前記チェーン(22)の伸び状態を判定するチェーン状態判定装置において、前記駆動軸(10)または前記被動軸(11,12)の一方である基準回転軸の回転角(θ)を検出する回転角検出手段(42)と、前記基準回転軸の回転速度(N)を検出する回転速度検出手段(43)と、前記チェーン(22)の伸びに起因して前記回転角検出手段(42)が出力する回転角信号(S1)に現れる特定信号(S1e)の周波数である判定用周波数(F)を、任意の前記回転速度(N)である判定用回転速度(Nf)での周波数として前記回転速度(N)に基づいて決定する周波数決定手段(51)と、前記回転角信号(S1)に基づく判定対象信号から前記判定用周波数(F)の信号を抽出信号(S3)として抽出するフィルタ手段(53)と、前記抽出信号(S3)に基づいて前記チェーン(22)の伸び状態の指標となる伸び指標値(H)を算出する指標値算出手段(54)と、伸び状態判定閾値(L)を前記判定用回転速度(Nf)に基づいて算出する判定閾値算出手段(55)と、前記伸び指標値(H)と前記伸び状態判定閾値(L)とを比較して前記伸び状態を判定する伸び状態判定手段(56)とを備えるチェーン状態判定装置である。
【0007】
これによれば、チェーン式巻掛け伝動機構が備えるチェーンの伸びに起因して基準回転軸の回転角信号に現れる特定信号から得られる判定用周波数を利用して、機械の運転中にチェーンの伸び状態が判定される。この結果、伸び状態が異常である場合を含めて伸びが発生したチェーンを特定できる。また、巻掛け伝動機構により作動する作動装置の種類に依存することなく、チェーンの伸び状態を判定でき、さらに、共通の駆動軸に設けられた複数の駆動スプロケットをそれぞれ備える複数の巻掛け伝動機構についても、チェーン毎の伸び状態の判定が可能になるので、チェーン状態判定装置の適用範囲を拡大できる。
さらに、伸び指標値は、基準回転軸の回転角信号および回転速度から得られ、しかも判定用周波数は任意の回転速度に対応して決定されるので、機械の運転中でのチェーンの伸び状態の判定が容易になる。
【0008】
請求項2記載の発明は、請求項1記載のチェーン状態判定装置において、前記回転角信号(S1)の大きさを一定の時間間隔(T1)毎に検出してサンプル信号(S2m)を出力する信号収集手段(52)を備え、前記判定対象信号は前記サンプル信号(S2m)であるものである。
これによれば、チェーンの伸びに起因する特定信号が現れる回転角信号を一定の時間間隔での信号の大きさに加工したサンプル信号から判定用周波数の抽出信号を得るので、回転角信号自体からフィルタ手段により抽出信号を得る場合に比べてチェーン状態判定装置の演算負荷を低減でき、その結果としてフィルタ手段による判定用周波数の抽出信号の生成が容易になる。
【0009】
請求項3記載の発明は、請求項1記載のチェーン状態判定装置において、前記回転角信号(S1)の大きさが一定の所定値(M)となる時間間隔(T2)を検出してサンプル信号(S2t)を出力する信号収集手段(52)を備え、前記判定対象信号は前記サンプル信号(S2t)であるものである。
これによれば、伸びに起因する特定信号が現れる回転角信号をその大きさが一定となるときの時間間隔に加工したサンプル信号から、判定用周波数の抽出信号を得るので、回転角信号自体からフィルタ手段により抽出信号を得る場合に比べてチェーン状態判定装置の演算負荷を低減でき、その結果としてフィルタ手段による判定用周波数の抽出信号の生成が容易になる。
【0010】
請求項4記載の発明は、請求項1から3のいずれか1項記載のチェーン状態判定装置において、前記回転速度をN、前記チェーン(22)の駒(32)の数をA、前記基準回転軸に設けられた前記駆動スプロケット(20)または前記被動スプロケット(21)の歯(30,31)の数をBとするとき、前記判定用周波数Fは、次式
F=(N/60)*(B/A)
により算出されるものである。
これによれば、伸び状態を検出する対象となるチェーンに固有な判定用周波数を利用すると共に、該判定用周波数は巻掛け伝動機構の構成部品の構造から簡単に算出できる。この結果、巻掛け伝動機構の構造に基づいて、チェーンの伸び状態の判定が容易になり、しかも、複数の巻掛け伝動機構の場合に、伸びが発生したチェーンの特定が容易になる。
【0011】
請求項5記載の発明は、請求項1から4のいずれか1項記載のチェーン状態判定装置において、伸び指標値(H)は、前記抽出信号(S3)の大きさの絶対値に基づく特性値を積算した積算値(Si)であるものである。
これによれば、伸び状態判定閾値と比較される伸び指標値が、抽出信号の絶対値に基づく特性値から算出された正の値となるので、伸び状態判定閾値の設定が容易になる。
【0012】
請求項6記載の発明は、請求項1から5のいずれか1項記載のチェーン状態判定装置において、前記伸び状態判定閾値(L)は、前記伸び状態の異常を判定するための異常判定閾値(La)であり、前記伸び状態判定手段(56)により前記伸び状態が異常であると判定されたときに異常を報知する警告手段(57a)を備えるものである。
これによれば、伸び状態が異常であるときには警告手段により異常が報知されることから、チェーンの伸び状態の異常を直ちに認識することができるので、チェーンの異常状態での機械の運転継続を防止する契機となる。
【0013】
請求項7記載の発明は、請求項1から6のいずれか1項記載のチェーン状態判定装置において、前記基準回転軸は、1つの前記駆動軸(10)であり、前記巻掛け伝動機構(T)は、前記1つの駆動軸(10)を共通の駆動軸とした第1巻掛け伝動機構および第2巻掛け伝動機構であり、前記チェーン(22)は、前記第1巻掛け伝動機構が備える第1チェーンおよび前記第2巻掛け伝動機構が備える第2チェーンであり、前記駆動スプロケット(20)は、前記第1巻掛け伝動機構が備える第1駆動スプロケットおよび前記第2巻掛け伝動機構が備える第2駆動スプロケットであり、前記被動軸(11,12)は、前記第1巻掛け伝動機構が備える第1被動軸および前記第2巻掛け伝動機構が備える第2被動軸であり、前記被動スプロケット(21)は、前記第1巻掛け伝動機構が備える第1被動スプロケットおよび前記第2巻掛け伝動機構が備える第2被動スプロケットであるものである。
これによれば、共通の駆動軸に設けられた第1,第2駆動スプロケットをそれぞれ備える第1,第2巻掛け伝動機構についても、第1,第2巻掛け伝動機構が同時に作動している状態で、各巻掛け伝動機構のチェーンの伸び状態を容易に判定できる。
【発明の効果】
【0014】
本発明によれば、チェーン式巻掛け伝動機構を備える機械の運転中に、該巻掛け伝動機構のチェーンの伸び状態を判定可能なチェーン状態判定装置において、チェーンの伸び状態の判定を容易化できると共に、チェーン状態判定装置を適用可能な巻掛け伝動機構の範囲を拡大できる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態を示し、チェーン状態判定装置を備える内燃機関の模式図である。
【図2】図1の内燃機関の巻掛け伝動機構のチェーンの要部断面図である。
【図3】図1のチェーン状態判定装置を中心としたブロック図である。
【図4】図1のチェーン状態判定装置の回転角検出手段が出力する回転角信号から、信号収集手段によるサンプル信号の生成を説明する模式図である。
【図5】図1のチェーン状態判定装置のフィルタ手段によるサンプル信号からの判定用周波数の抽出信号の抽出を説明する模式図である。
【図6】図1のチェーン状態判定装置の指標値算出手段による計算回数、積算値および異常判定閾値との関係を模式的に示すグラフである。
【図7】図1のチェーン状態判定装置によるチェーンの伸び状態の判定手順を説明するフローチャートである。
【図8】本発明の第2実施形態での信号収集手段によるサンプル信号の生成を説明する模式図であり、図4に対応する図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を図1〜図8を参照して説明する。
図1〜図7は、本発明の第1実施形態を説明するための図である。
図1に示される第1実施形態において、機械としての内燃機関Eは、単気筒または多気筒の、ここでは直列4気筒の4ストローク内燃機関であり、搭載対象である車両に搭載される。
【0017】
内燃機関Eは、ピストン(図示されず)が往復運動可能に嵌合するシリンダブロック1を備える本体としての機関本体と、該機関本体に回転可能に支持される駆動軸としてのクランク軸10および該クランク軸10により回転駆動される1以上の所定数の、ここでは複数としての2つの被動軸であるカム軸11およびバランサ軸12と、クランク軸10の動力をカム軸11およびバランサ軸12にそれぞれ伝達する前記所定数としての2つのチェーン式巻掛け伝動機構Ta,Tbと、内燃機関Eの運転を制御する制御装置としてのエンジン制御装置40と、各巻掛け伝動機構Ta,Tbのチェーン22a,22bの伸び状態を判定するチェーン状態判定装置50とを備える。
【0018】
前記機関本体は、シリンダブロック1と、シリンダブロック1に結合されたシリンダヘッド2と、シリンダヘッド2に結合されたヘッドカバー3と、シリンダヘッド2とは反対側でシリンダブロック1に結合されたロアブロック4と、ロアブロック4に結合されたオイルパン5とから構成される。
燃焼室で発生する燃焼ガスにより駆動されて往復運動する前記ピストンにより回転駆動されるクランク軸10は、シリンダブロック1におけるロアブロック4側部分1cとロアブロック4とに回転可能に支持される。また、前記部分1c、ロアブロック4およびオイルパン5は、クランク軸10およびバランサ装置8が収納されるクランク室6を形成するクランクケースを構成する。
【0019】
前記燃焼室に対する吸排気を制御する吸気弁および排気弁を開閉する動弁装置(図示されず)が備えるカム軸11は、シリンダヘッド2に回転可能に支持されて、該カム軸11に設けられたカムにより吸気弁および排気弁の開閉時期を規定する。
前記動弁装置を作動させる巻掛け伝動機構Taは、シリンダブロック1およびロアブロック4により支持されるクランク軸10の軸端部に設けられてクランク軸10と共に回転する駆動スプロケット20aと、カム軸11の軸端部に設けられてカム軸11と共に回転する被動スプロケット21aと、多数の歯30a,31aをそれぞれ有する両スプロケット20a,21aおよびアイドルスプロケット25に巻き掛けられた無端のチェーン22aとを備え、カム軸11を、クランク軸10の回転速度Nに対して所定の変速比である1/2倍の変速比で回転駆動する。
【0020】
前記ピストンの往復運動に起因して発生する2次振動を低減するバランサ装置8が備える1対の第1,第2バランサ軸12,13は、ロアブロック4に固定されて設けられるハウジング15に回転可能に支持され、したがって該ハウジング15を介してロアブロック4に回転可能に支持される。第1バランサ軸12は、互いに噛合する1対の歯車から構成される軸間伝動機構16を介して第2バランサ軸13を回転駆動し、それぞれバランスウエイト17が設けられた両バランサ軸12,13が、互いに等速で、逆方向に回転する。
【0021】
バランサ装置8を作動させる巻掛け伝動機構Tbは、クランク軸10の軸端部に設けられてクランク軸10と共に回転する駆動スプロケット20bと、第1バランサ軸12の軸端部に設けられて第1バランサ軸12と共に回転する被動スプロケット21bと、多数の歯30b,31bをそれぞれ有する両スプロケット20b,21bに巻き掛けられた無端のチェーン22bとを備え、両バランサ軸12,13をクランク軸10の回転速度Nに対して別の所定の変速比である2倍の変速比で回転駆動する。
【0022】
内燃機関Eが備える前記動弁装置およびバランサ装置8はいずれも作動装置であり、カム軸11は、被作動部材としての前記吸気弁および前記排気弁の開閉時期である作動時期を規定し、各バランサ軸12,13は、被作動部材としてのバランスウエイト17によるバランス力の発生時期である作動時期を規定する。
なお、以下の説明において、両巻掛け伝動機構Ta,Tbおよびその構成部材について、区別をしない場合、添え字「a」,「b」が付かない符号が使用される。そして、内燃機関Eは、少なくとも1つの巻掛け伝動機構Tを備える。
【0023】
ローラチェーンである各チェーン22a,22bはいずれも多数の駒32a,32bから構成される同様の構造であり、図2に示されるように、第1リンクプレートとしての外側リンクプレート34と、第2リンクプレートとしての内側リンクプレート35と、両リンクプレート34,35を連結するリンクピン36と、リンクピン36に回転可能に支持されているローラ37と、さらにリンクピン36とローラ37および内側リンクプレート35との間に配置されたスリーブ38とを備える。
【0024】
ここで、チェーン22の駒32とは、チェーン22において、1つのリンクピン36と該1つのリンクピン36で結合された各リンクプレート34,35とで構成される部分であるとし、この実施形態では、該駒32には、さらに前記1つのリンクピン36に挿入されたスリーブ38が含まれる。したがって、チェーン22において、駒32の数はリンクピン36の数と一致し、各リンクプレート34,35は、チェーン22の走行方向で隣接する駒32と共有される。
【0025】
カム軸11および第1バランサ軸12において、一方が第1被動軸であるとき、他方は第2被動軸であるとする。また、いずれもタイミングチェーン機構である動弁用巻掛け伝動機構Taおよびバランサ用巻掛け伝動機構Tbにおいて、一方が第1巻掛け伝動機構であるとき、他方は第2巻掛け伝動機構であるとする。そして、両被動スプロケット20a,20bにおいて、一方が第1被動スプロケットであるとき、他方は第2被動スプロケットであるとする。
そして、両巻掛け伝動機構Ta,Tbに関して、両チェーン22a,22bの駒32a,32bの数は異なり、両駆動スプロケット20a,20bの歯30a,30bの数は異なる。
【0026】
図3を参照すると、エンジン制御装置40は、内燃機関Eの運転状態を検出する運転状態検出手段41と、運転状態検出手段41の検出信号が入力されると共に該運転状態検出手段41により検出された各運転状態に基づいて内燃機関Eの作動状態としての運転状態を制御する運転制御部品47である燃料噴射弁等を制御する電子制御ユニット(以下、「ECU」という。)45とを備える。
内燃機関Eが備える運転制御部品47を制御する運転制御手段46を備えるECU45は、入出力インターフェース、中央演算処理装置、各種の制御プログラムなどが記憶されたROMおよび各種のデータなどが一時的に記憶されるRAMを有する記憶装置を備えるコンピュータである。そして、前記記憶装置には、後記する各種マップ51a,51b,55a,55bが格納されている。
【0027】
運転状態検出手段41は、基準回転軸としてのクランク軸10の回転角θであるクランク角を検出する回転角検出手段42と、回転角検出手段42により検出された回転角θに基づいてクランク軸10の回転速度Nをエンジン回転速度として検出する回転速度検出手段43と、クランク軸10の特定回転角として前記各ピストンの上死点位置を検出する特定回転角検出手段44とを含む。
【0028】
回転角検出手段42は、クランク軸10と一体に回転するパルサである被検出部と、パルサの回転方向に所定角度毎に等間隔に設けられた多数の突起の位置を磁束の変化を通じて検出してパルス状の検出信号を出力する検出部とを備える。別の例として、回転角検出手段42が、前記した磁気式検出手段のほかに、光学式検出手段で構成されてもよい。
回転速度Nは、回転角検出手段42により検出された回転角θに基づいて算出される角速度の複数の値の平均値、ここでは回転方向で隣接する前記上死点位置の間での複数の角速度の平均値として算出される。
【0029】
図3,図4を参照すると、チェーン状態判定装置50は、いずれも運転状態検出手段41である回転角検出手段42および回転速度検出手段43と、チェーン22の伸びに起因して回転角検出手段42が出力する検出信号としてのクランク角信号である回転角信号S1に現れる特定信号S1eの周波数である判定用周波数Fを回転速度Nに基づいて決定する周波数決定手段51と、回転角信号S1の大きさを一定の時間間隔T1毎に検出することによりサンプル信号S2としての振幅サンプル信号S2mを生成する振幅信号収集手段である信号収集手段52と、回転角信号S1に基づく判定対象信号としての振幅サンプル信号S2mから判定用周波数Fの信号を抽出信号S3として抽出する信号抽出手段としてのフィルタ手段53と、フィルタ手段53から出力された抽出信号S3に基づいてチェーン22の伸び状態(または伸び量)の指標となる伸び指標値Hを算出する指標値算出手段54と、周波数決定手段51が判定用周波数Fを決定するときの回転速度Nである判定用回転速度Nfに対応した伸び状態判定閾値Lとしての異常判定閾値Laを算出する判定閾値算出手段55と、伸び指標値Hと異常判定閾値Laとを比較してチェーン22の伸び状態を判定する伸び状態判定手段56と、チェーン22の伸び状態が特定の伸び状態にあることを報知する報知手段57としての警告手段57aとを備える。
【0030】
チェーン状態判定装置50は、運転者により操作される判定対象切換手段としてのスイッチ(図示されず)により、伸び状態の判定対象となるチェーン22を、巻掛け伝動機構T単位で切り換えることができる。それゆえ、チェーン状態判定装置50は、各チェーン22a,22bの伸び状態を判定できる。
【0031】
周波数決定手段51、信号収集手段52、指標値算出手段54、判定閾値算出手段55、および伸び状態判定手段56は、ECU45にその機能として備えられるが、ECU45とは別の電子制御ユニットに備えられてもよい。
この実施形態では、伸び状態判定手段56は、チェーン22の伸び状態が、正常な範囲にあるか、該正常範囲から外れて異常の範囲にあるかを判定し、また伸び状態判定手段56により作動させられる警告手段57a(例えば、ランプなどの表示手段)は、チェーン22の伸び状態が異常の範囲にあることを報知する、すなわちチェーン22の伸びの異常を報知する。
【0032】
図2を参照すると、チェーン22の伸びは、チェーン22において接触部であるリンクピン36、スリーブ38、外側リンクプレート34におけるリンクピン36の挿入部34c、内側リンクプレート35におけるリンクピン36およびスリーブ38の挿入部35cが摩耗して隙間(以下、「チェーン隙間」という。)が形成されることで発生する。
【0033】
図1,図3を参照すると、周波数決定手段51は、チェーン22の伸び状態を判定するための判定用周波数Fを、任意の回転速度Nである判定用回転速度Nfでの周波数として、回転速度Nに基づいて決定する。
具体的には、ECU45には、巻掛け伝動機構Ta,Tb毎に、回転速度Nに対応する判定用周波数Fが設定された巻掛け伝動機構Ta用の周波数マップ51aまたは巻掛け伝動機構Tb用の周波数マップ51bが記憶されている。そして、周波数決定手段51は、伸び状態の判定対象となるチェーン22a,22bを備える巻掛け伝動機構Ta,Tbに対応して、回転速度検出手段43により検出された回転速度Nに基づいて周波数マップ51a,51bを検索することにより、判定用回転速度Nfに対応する判定用周波数Fを決定する。別の例として、周波数マップ51a,51bを作成することなく、判定用周波数Fが後記の計算式である式(1)により、回転速度Nに基づいて算出されてもよい。
このように、周波数決定手段51により、チェーン22の伸び状態の判定が行われる任意の回転速度Nを判定用回転速度Nfとしたときの判定用周波数Fが決定される。
【0034】
一方、チェーン22の伸びは、チェーン22を構成する各駒32の伸びの合計値であることから、1つずつの駒32の伸びに起因する現象を、チェーン22のすべての駒32に関して収集することで、チェーン22の伸び状態を検出することができる。
具体的には、各駒32が駆動スプロケット20と係合する(または、噛合する)ときに、伸びがほとんどない正常な駒32とは異なり、伸びが生じた駒32には、前記チェーン隙間が形成されているために、伸びが生じた駒32と係合する駆動スプロケット20に作用する負荷の変化に起因するクランク軸10の角速度の変化が発生し、この角速度変化が、回転角検出手段42の検出信号である回転角信号S1に現れる。
したがって、1つずつの駒32の伸びに起因する現象は、特定信号S1e(図4参照)として、回転角信号S1に現れ、この特定信号S1eを解析または加工することにより、チェーン22の伸び状態を検出することができる。
【0035】
そして、判定用周波数Fは、例えば、チェーン22の駒32の1つに伸びが発生したときに、該駒32の伸びに基づいて発生する特定信号S1eの周波数として、次式で算出される。
F=(N/60)*(B/A) (1)
ここで、
N:回転速度
A:チェーン22の駒32の数
B:基準回転軸(この実施形態では、クランク軸10である。)に設けられたス
プロケット(この実施形態では、駆動スプロケット20である。)の歯30
の数
である。
【0036】
このように、判定用周波数Fは、クランク軸10(基準回転軸)の回転速度N、駆動スプロケット20(基準回転軸に設けられたスプロケット)およびチェーン22に基づいて定まる周波数であり、同一回転速度Nにおいて各巻掛け伝動機構Ta,Tbに固有の周波数である。
【0037】
図4を併せて参照すると、信号収集手段52は、この特定信号S1eを含む回転角信号S1からチェーン22a,22bの伸び状態の判定に使用される判定対象信号である振幅サンプル信号S2mを生成するために、回転角信号S1において、一定の時間間隔T1毎に、回転角信号S1の大きさを、所定の信号収集時間に渡って検出し、かつ時系列に収集して、振幅サンプル信号S2mを出力する。
なお、図4において、チェーン22に伸びが殆ど発生していないチェーン状態であるチェーン正常時の回転角信号S1が破線で示され、前記チェーン隙間に起因するチェーン22の伸びが発生したときのチェーン状態であるチェーン伸び時、図示の例では後記許容範囲を超える伸びが発生したときの回転角信号S1が実線で示されている。
そして、図5には、前記チェーン正常時の振幅サンプル信号S2mおよび前記チェーン伸び時の振幅サンプル信号S2mが示されている。
【0038】
ここで、時間間隔T1は、例えば判定用周波数Fの関数として、サンプリング定理を満たすように次式により設定される。
T1<1/(2F) (2)
また、前記信号収集時間は、回転角信号S1の大きさに関連する信号である振幅サンプル信号S2mがチェーン22の伸びを検出するための信頼性のあるデータとなるように設定されると共に、回転速度Nと関連して、該回転速度Nが大きいほど短く設定される。例えば、回転速度Nが800rpmであるとき、信号収集時間は5秒程度である。
【0039】
バンドパスフィルタにより構成されるフィルタ手段53は、この実施形態では複数の異なる周波数の通過を許容する1以上の可変周波数バンドパスフィルタまたは1以上の、ここでは複数の固定周波数バンドパスフィルタにより構成される。
フィルタ手段53は、入力された振幅サンプル信号S2mのうち、判定用周波数Fの信号を通過させて、該通過信号を抽出信号S3として出力する。前記チェーン正常時の振幅サンプル信号S2mには判定用周波数Fの信号成分が殆ど含まれていないため、抽出信号S3は、図5に示されるように、振幅が0(ゼロ)付近の信号となる一方で、前記チェーン伸び時の振幅サンプル信号S2mには判定用周波数Fの信号成分が含まれているため、抽出信号S3は、チェーン正常時に比べて大きな振幅の信号となる。そして、抽出信号S3の振幅は、チェーン22の伸びが大きくなるほど大きくなる。
【0040】
指標値算出手段54は、抽出信号S3の大きさの絶対値に基づく特性値、この実施形態では抽出信号S3の大きさを2乗した値である特性値を求め、該特性値を所定の計算回数Cだけ積算した積算値Siを伸び指標値Hとして算出する。
計算回数Cは、異常時での抽出信号S3の積算値Siの変動幅が、正常時での積算値Siの変動幅と重なることなく、正常時の積算値Siと異常時の積算値Siとが明確に分離されるように、シミュレーション等により予め設定される。この計算回数Cは、例えば4000回である。
【0041】
判定閾値算出手段55は、チェーン22の伸び状態の判定基準となる伸び状態判定閾値Lとしての異常判定閾値Laを判定用回転速度Nf毎に算出する。具体的には、ECU45には、伝動機構Ta,Tb毎に、回転速度Nに対応する異常判定閾値Laが設定された閾値マップ55a,55bが記憶されている。そして、判定閾値算出手段55は、伸び状態の判定対象となるチェーン22a,22bを備える巻掛け伝動機構Ta,Tbに対応して、回転速度Nに基づいて巻掛け伝動機構Ta用の閾値マップ55aまたは巻掛け伝動機構Tb用の閾値マップ55bを検索することにより、判定用回転速度Nfに対応する異常判定閾値Laを算出する。
【0042】
伸び状態判定手段56は、図6に示されるように、積算値Siと異常判定閾値Laとを比較して、積算値Siの全体が、異常判定閾値Laを境に、正常の範囲にあるとき、チェーン22の伸びが正常であると判定し、異常の範囲にあるとき、チェーン22の伸びが異常であると判定する。
【0043】
必要に応じて図3を参照しながら図7を参照して、チェーン状態判定装置50により実行されるチェーン22の伸び状態の判定方法を説明する。
ステップS1では、チェーン22の伸び状態の判定を開始する際のクランク軸10の回転速度Nが、判定用回転速度Nfとして検出される。その後、ステップS2で、周波数決定手段51により、周波数マップ51a,51bから判定用回転速度Nfに対応する判定用周波数Fが決定される。次いで、ステップS3で、伸び指標値Hである積算値Siがリセットされて初期値としての0に設定され、ステップS4で、積算値Siを算出するための計算回数Cがリセットされて0にされた後、ステップS5で、今までカウントされた計算回数Cに1を加算して今回の計算回数Cを算出する。
【0044】
次いで、ステップS6で、回転角信号S1が読み込まれて、信号収集手段52により、時間間隔T1毎の回転角信号S1の大きさが前記所定信号収集時間に渡って検出され、かつ時系列に収集されて、振幅サンプル信号S2mが生成される。次いで、振幅サンプル信号S2mが判定用周波数Fの信号を通過させるフィルタ手段53に入力されて、抽出信号S3が抽出される。
【0045】
その後、ステップS7で、抽出信号S3の大きさの2乗が今までの積算値Siに加算されて最新の積算値Siが算出された後、ステップS8で、計算回数Cが予め設定された所定回数Csに達したか否かが判定される。計算回数Cが所定回数Csに達していないときは、ステップS5〜ステップS8までの処理が繰り返し実行されて、計算回数Cが所定回数Csになるまで積算される。
このように、ステップS5〜ステップS8において、抽出信号S3の2乗を特性値として算出し、該特性値を所定回数Csだけ加算して積算値Siを算出する処理は、指標値算出手段54により行われる。
そして、計算回数Cが所定回数Csに達したとき、ステップS9で、判定閾値算出手段55により、閾値マップ55a,55bから判定用回転速度Nfに対応する異常判定閾値Laが算出された後、ステップS10で積算値Siと異常判定閾値Laとが比較される。
【0046】
ステップS10で、積算値Siが異常判定閾値La未満であるとき、ステップS11で、伸び状態判定手段56により伸び状態が正常の範囲にある、すなわちチェーン22の伸びが予め設定された許容範囲であると判定される。また、ステップS10で、積算値Siが異常判定閾値La以上であるとき、ステップS12で伸び状態判定手段56により伸び状態が異常である、すなわちチェーン22の伸びが前記許容範囲を超えると判定されて、ステップS13で警告手段57aが警告を発生して、運転者にその異常を知らせる。
【0047】
ここで、チェーン状態判定装置50によるチェーン22の伸び状態の判定は、クランク軸10または駆動スプロケット20が実質的に同一の回転速度N(すなわち、判定用回転速度Nf)であるときに実行され、特に、ステップS5からステップS8までの一連の処理は、回転速度Nが実質的に判定用回転速度Nfであるときに実行される。
ここで、「実質的に同一」とは、回転速度Nが同一である場合のほかに、チェーン状態判定装置50によるチェーン22の伸び状態の判定に関して所要の信頼性が維持できる程度に、回転速度Nが変化してもよいことを意味する。
【0048】
次に、前述のように構成された実施形態の作用および効果について説明する。
チェーン式巻掛け伝動機構Tを備える内燃機関Eにおけるチェーン22の伸び状態を判定するチェーン状態判定装置50は、チェーン22の伸びに起因して回転角検出手段42が出力する回転角信号S1に現れる特定信号S1eの周波数である判定用周波数Fを、任意の回転速度Nである判定用回転速度Nfでの周波数として回転速度Nに基づいて決定する周波数決定手段51と、回転角信号S1に基づく判定対象信号である振幅サンプル信号S2mから判定用周波数Fの信号を抽出信号S3として抽出するフィルタ手段53と、抽出信号S3に基づいてチェーン22a,22bの伸び状態の指標となる伸び指標値Hを算出する指標値算出手段54と、伸び状態判定閾値Lを判定用回転速度Nfに基づいて算出する判定閾値算出手段55と、伸び指標値Hと伸び状態判定閾値Lとを比較してチェーン22の伸び状態を判定する伸び状態判定手56とを備える。
この構造により、巻掛け伝動機構Tが備えるチェーン22の伸びに起因してクランク軸10の回転角信号S1に現れる特定信号S1eから得られる判定用周波数Fを利用して、内燃機関Eの運転中にチェーン22の伸び状態が判定される。この結果、伸び状態が異常である場合を含めて伸びが発生したチェーン22を特定できる。また、巻掛け伝動機構Tにより作動する作動装置の種類、ここでは前記動弁装置およびバランサ装置8に依存することなく、チェーン22の伸び状態を判定でき、さらに、共通のクランク軸10に設けられた駆動スプロケット20a,20bをそれぞれ備える複数の巻掛け伝動機構Ta,Tbについて、チェーン22a,22b毎の伸び状態の判定が可能になるので、チェーン状態判定装置50の適用範囲を拡大できる。
さらに、伸び指標値Hは、クランク軸10の回転角信号S1および回転速度Nから得られ、しかも判定用周波数Fは任意の回転速度Nに対応して決定されるので、内燃機関Eの運転中でのチェーン22の伸び状態の判定が容易になる。
【0049】
さらに、回転角検出手段42、回転速度検出手段43およびECU45は、内燃機関Eの運転に必須のエンジン制御装置40が備えるものを利用するので、チェーン状態判定装置50に専用の回転角検出手段および回転速度検出手段が不要になって、チェーン状態判定装置50のコストを削減できる。
また、判定用周波数Fを変更することにより、任意の回転速度Nでチェーン状態の判定が可能であり、さらに駒32の数が異なるチェーン22a,22bを備える複数の伝動機構Ta,Tbにおけるチェーン状態の判定にも容易に適用できる。
【0050】
判定用周波数Fが、前記式(1)で算出されることにより、伸び状態を検出する対象となるチェーン22に固有な判定用周波数Fを利用すると共に、該判定用周波数Fは巻掛け伝動機構Tの構成部品の構造から簡単に算出できる。この結果、巻掛け伝動機構Tの構造に基づいて、チェーン22の伸び状態の判定が容易になり、しかも、複数の巻掛け伝動機構Ta,Tbの場合に、伸びが発生したチェーン22a,22bの特定が容易になる。
【0051】
回転角信号S1の大きさを一定の時間間隔T1毎に検出して振幅サンプル信号S2mを出力する信号収集手段52を備え、前記判定対象信号は振幅サンプル信号S2mであることにより、チェーン22の伸びに起因する特定信号S1eが現れる回転角信号S1を一定の時間間隔T1での信号の大きさに加工した振幅サンプル信号S2mから判定用周波数Fの抽出信号S3を得るので、回転角信号S1自体からフィルタ手段53により抽出信号S3を得る場合に比べてチェーン状態判定装置50を構成するECU45の演算負荷を低減でき、その結果としてフィルタ手段53による判定用周波数Fの抽出信号S3の生成が容易になる。
【0052】
伸び指標値Hは、抽出信号S3の大きさの絶対値に基づく特性値として抽出信号S3の2乗を積算した積算値Siであることにより、伸び状態判定閾値Lと比較される伸び指標値Hが、抽出信号S3の2乗に基づく特性値から算出された正の値となるので、伸び状態判定閾値Lの設定が容易になる。
【0053】
判定閾値算出手段55により算出される伸び状態判定閾値Lは、前記伸び状態の異常を判定するための異常判定閾値Laであり、チェーン状態判定装置50が伸び状態判定手段56により伸び状態が異常であると判定されたときに異常を報知する警告手段57aを備えることにより、伸び状態が異常であるときには警告手段57aにより異常が報知されることから、チェーン22の伸び状態の異常を直ちに認識することができるので、チェーン22の異常状態での内燃機関Eの運転継続を防止する契機となる。
【0054】
2つの巻掛け伝動機構Ta,Tbは、クランク軸10を共通の1つの駆動軸としていることにより、共通の駆動軸に設けられた駆動スプロケット20a,20bをそれぞれ備える両巻掛け伝動機構Ta,Tbについて、各巻掛け伝動機構Ta,Tbが同時に作動している状態で、各巻掛け伝動機構Ta,Tbのチェーン22a,22bの伸び状態を容易に判定できる。
【0055】
次に、一部に第2実施形態が示される図3と、図7,図8を参照して、本発明の第2実施形態を説明する。この第2実施形態は、第1実施形態とは、サンプル信号S2を出力する信号収集手段52が相違し、その他は基本的に同一の構成を有するものである。そのため、同一の部分についての説明は省略または簡略にし、異なる点を中心に説明する。
【0056】
第2実施形態において時間間隔信号収集手段である信号収集手段52は、図8に示されるように、回転角信号S1の大きさが一定の所定値Mとなる時間間隔T2を所定の信号収集時間に渡って検出して間隔時間サンプル信号S2t(図3参照)を生成する。
具体的には、信号収集手段52は、判定対象信号である間隔時間サンプル信号S2tを生成するために、図8に示されるように、回転角信号S1が増減方向で同じ方向(図8に示された例では減少方向)に変化するときの回転角信号S1の大きさが一定の所定値Mとなる時間間隔T2を、所定の信号収集時間に渡って検出し、かつ時系列に収集してサンプル信号S2としての間隔時間サンプル信号S2t(第1実施形態の振幅サンプル信号S2m(図4参照)に対応する。)を出力する。
【0057】
ここで、所定値Mは、チェーン22に伸びが殆どないときの回転角信号S1の振幅および特定信号S1eの振幅に依存して、チェーン22の伸び状態の変化に応じた特定信号S1eの振幅の変化を検出できる値に設定される。
また、前記信号収集時間は、例えば第1実施形態での信号収集時間と同様に設定される。
【0058】
そして、第1実施形態と同様に、フィルタ手段53は、入力された時間間隔サンプル信号S2tのうち、判定用周波数Fの信号を通過させる。このため、図5に示される第1実施形態の抽出信号S3と同様の抽出信号が、前記チェーン正常時および前記チェーン伸び時のそれぞれに対応して抽出される。
また、第2実施形態では、チェーン状態判定装置50によるチェーン22の伸び状態の判定方法は、ステップS6での処理を除いて同様である。第2実施形態では、図7のステップS6において、回転角信号S1が読み込まれて、信号収集手段52により、回転角信号S1の大きさが所定値Mとなる時間間隔T2が前記信号収集時間に渡って検出され、かつ時系列に収集されて、時間間隔サンプル信号S2tが生成され、次いで、該時間間隔サンプル信号S2tが判定用周波数Fの信号を通過させるフィルタ手段53に入力されて、抽出信号S3が抽出される。
【0059】
この第2実施形態によれば、判定対象信号の形成手段が異なることによる作用効果を除いて、第1実施形態と同様の作用効果が奏されるほか、次の作用効果が奏される。
回転角信号S1の大きさが一定の所定値Mとなる時間間隔T2を前記信号収集時間に渡って検出して時間間隔サンプル信号S2tを出力する信号収集手段52を備えることにより、伸びに起因する特定信号S1eが現れる回転角信号S1をその大きさが一定となるときの時間間隔T2に加工した時間間隔サンプル信号S2tから、判定用周波数Fの抽出信号S3を得るので、判定用周波数Fの抽出信号S3の生成に関して、第1実施形態と同様の効果が奏される。
【0060】
以下、前述した実施形態の一部の構成を変更した実施形態について、変更した構成に関して説明する。
チェーン状態判定装置50は、1つの巻掛け伝動機構のチェーンの伸び状態、または3以上の巻掛け伝動機構のチェーンの伸び状態を判定するものであってもよい。
チェーン状態判定装置50は信号収集手段52を備えることなく、前記判定対象信号が回転角信号S1自体であってもよい。
回転角検出手段42および回転速度検出手段43により回転角および回転速度Nが検出される基準回転軸は、駆動軸の代わりに被動軸であってもよい。この場合、判定用周波数Fを算出する式(1)のスプロケットは、被動スプロケットである。また、回転角検出手段42および回転速度検出手段43は、駆動スプロケットまたは被動スプロケットの回転角および回転角速度をそれぞれ検出するものであってもよい。
3以上のチェーン式巻掛け伝動機構が、1つの共通の駆動軸に設けられた3以上の駆動スプロケットをそれぞれ備えていてもよい。
【0061】
チェーン状態判定装置50は、この実施形態では、チェーン22の伸びが、正常の範囲であるか、または異常であるかを判定するものであったが、チェーン22の伸び状態が正常な範囲で、異常に至るまでの伸び状態を段階的に判定するものであってもよい。この場合、伸び状態判定閾値Lは、異常判定閾値Laよりも小さい複数の判定閾値が設定される。さらに、この場合に、報知手段57が設けられることなく、前記判定閾値が機関状態の制御に使用されてもよい。
報知手段57は、異常時の報知に加えて、チェーン22の伸び状態が正常であることを報知するものであってもよい。
【0062】
駆動軸は、複数の巻掛け伝動機構について、別々の軸であってもよい。
被動軸は、内燃機関Eにおいて、カム軸11、バランサ軸12以外の回転軸、例えば発電機、コンプレッサ、冷却水ポンプなどの補機の回転軸であってもよい。
抽出信号S3の大きさの絶対値に基づく特性値は、抽出信号S3の大きさの絶対値であってもよく、この場合にも特性値が抽出信号S3の2乗であるときと同様の効果が奏される。
【0063】
チェーンは、サイレントチェーンであってもよい。
内燃機関Eが搭載される対象は、車両以外のもの、例えば船外機等の船舶推進装置、または発電装置などの、作業用装置であってもよい。
機械は、内燃機関以外の、駆動軸および被動軸間で動力を伝達するチェーン式巻掛け伝動機構を備える機械、例えば電動モータなどの駆動モータにより駆動軸が回転駆動されるもの(一例として、搬送装置)であってもよい。
【符号の説明】
【0064】
10 クランク軸
11 カム軸
12 バランサ軸
20 駆動スプロケット
21 被動スプロケット
22 チェーン
42 回転角検出手段
43 回転速度検出手段
50 チェーン状態判定装置
51 周波数決定手段
52 信号収集手段
53 フィルタ手段
54 指標値算出手段
55 判定閾値算出手段
56 伸び状態判定手段
T 巻掛け伝動機構
Nf 判定用回転速度
S1 回転角信号
S1e 特定信号
S2 サンプル信号
S3 抽出信号
H 伸び指標値
Si 積算値
La 異常判定閾値
F 判定用周波数
【特許請求の範囲】
【請求項1】
駆動軸に設けられた駆動スプロケットと被動軸に設けられた被動スプロケットとに掛け渡されたチェーンとを備える少なくとも1つの巻掛け伝動機構を備える機械における前記チェーンの伸び状態を判定するチェーン状態判定装置において、
前記駆動軸または前記被動軸の一方である基準回転軸の回転角を検出する回転角検出手段と、
前記基準回転軸の回転速度を検出する回転速度検出手段と、
前記チェーンの伸びに起因して前記回転角検出手段が出力する回転角信号に現れる特定信号の周波数である判定用周波数を、任意の前記回転速度である判定用回転速度での周波数として前記回転速度に基づいて決定する周波数決定手段と、
前記回転角信号に基づく判定対象信号から前記判定用周波数の信号を抽出信号として抽出するフィルタ手段と、
前記抽出信号に基づいて前記チェーンの伸び状態の指標となる伸び指標値を算出する指標値算出手段と、
伸び状態判定閾値を前記判定用回転速度に基づいて算出する判定閾値算出手段と、
前記伸び指標値と前記伸び状態判定閾値とを比較して前記伸び状態を判定する伸び状態判定手段とを備えることを特徴とするチェーン状態判定装置。
【請求項2】
請求項1記載のチェーン状態判定装置において、
前記回転角信号の大きさを一定の時間間隔毎に検出してサンプル信号を出力する信号収集手段を備え、
前記判定対象信号は前記サンプル信号であることを特徴とするチェーン状態判定装置。
【請求項3】
請求項1記載のチェーン状態判定装置において、
前記回転角信号の大きさが一定の所定値となる時間間隔を検出してサンプル信号を出力する信号収集手段を備え、
前記判定対象信号は前記サンプル信号であることを特徴とするチェーン状態判定装置。
【請求項4】
請求項1から3のいずれか1項記載のチェーン状態判定装置において、
前記回転速度をN、前記チェーンの駒の数をA、前記基準回転軸に設けられた前記駆動スプロケットまたは前記被動スプロケットの歯の数をBとするとき、前記判定用周波数Fは、次式
F=(N/60)*(B/A)
により算出されることを特徴とするチェーン状態判定装置。
【請求項5】
請求項1から4のいずれか1項記載のチェーン状態判定装置において、
前記伸び指標値は、前記抽出信号の大きさの絶対値に基づく特性値を積算した積算値であることを特徴とするチェーン状態判定装置。
【請求項6】
請求項1から5のいずれか1項記載のチェーン状態判定装置において、
前記伸び状態判定閾値は、前記伸び状態の異常を判定するための異常判定閾値であり、
前記伸び状態判定手段により前記伸び状態が異常であると判定されたときに異常を報知する警告手段を備えることを特徴とするチェーン状態判定装置。
【請求項7】
請求項1から6のいずれか1項記載のチェーン状態判定装置において、
前記基準回転軸は、1つの前記駆動軸であり、
前記巻掛け伝動機構は、前記1つの駆動軸を共通の駆動軸とした第1巻掛け伝動機構および第2巻掛け伝動機構であり、
前記チェーンは、前記第1巻掛け伝動機構が備える第1チェーンおよび前記第2巻掛け伝動機構が備える第2チェーンであり、
前記駆動スプロケットは、前記第1巻掛け伝動機構が備える第1駆動スプロケットおよび前記第2巻掛け伝動機構が備える第2駆動スプロケットであり、
前記被動軸は、前記第1巻掛け伝動機構が備える第1被動軸および前記第2巻掛け伝動機構が備える第2被動軸であり、
前記被動スプロケットは、前記第1巻掛け伝動機構が備える第1被動スプロケットおよび前記第2巻掛け伝動機構が備える第2被動スプロケットであることを特徴とするチェーン状態判定装置。
【請求項1】
駆動軸に設けられた駆動スプロケットと被動軸に設けられた被動スプロケットとに掛け渡されたチェーンとを備える少なくとも1つの巻掛け伝動機構を備える機械における前記チェーンの伸び状態を判定するチェーン状態判定装置において、
前記駆動軸または前記被動軸の一方である基準回転軸の回転角を検出する回転角検出手段と、
前記基準回転軸の回転速度を検出する回転速度検出手段と、
前記チェーンの伸びに起因して前記回転角検出手段が出力する回転角信号に現れる特定信号の周波数である判定用周波数を、任意の前記回転速度である判定用回転速度での周波数として前記回転速度に基づいて決定する周波数決定手段と、
前記回転角信号に基づく判定対象信号から前記判定用周波数の信号を抽出信号として抽出するフィルタ手段と、
前記抽出信号に基づいて前記チェーンの伸び状態の指標となる伸び指標値を算出する指標値算出手段と、
伸び状態判定閾値を前記判定用回転速度に基づいて算出する判定閾値算出手段と、
前記伸び指標値と前記伸び状態判定閾値とを比較して前記伸び状態を判定する伸び状態判定手段とを備えることを特徴とするチェーン状態判定装置。
【請求項2】
請求項1記載のチェーン状態判定装置において、
前記回転角信号の大きさを一定の時間間隔毎に検出してサンプル信号を出力する信号収集手段を備え、
前記判定対象信号は前記サンプル信号であることを特徴とするチェーン状態判定装置。
【請求項3】
請求項1記載のチェーン状態判定装置において、
前記回転角信号の大きさが一定の所定値となる時間間隔を検出してサンプル信号を出力する信号収集手段を備え、
前記判定対象信号は前記サンプル信号であることを特徴とするチェーン状態判定装置。
【請求項4】
請求項1から3のいずれか1項記載のチェーン状態判定装置において、
前記回転速度をN、前記チェーンの駒の数をA、前記基準回転軸に設けられた前記駆動スプロケットまたは前記被動スプロケットの歯の数をBとするとき、前記判定用周波数Fは、次式
F=(N/60)*(B/A)
により算出されることを特徴とするチェーン状態判定装置。
【請求項5】
請求項1から4のいずれか1項記載のチェーン状態判定装置において、
前記伸び指標値は、前記抽出信号の大きさの絶対値に基づく特性値を積算した積算値であることを特徴とするチェーン状態判定装置。
【請求項6】
請求項1から5のいずれか1項記載のチェーン状態判定装置において、
前記伸び状態判定閾値は、前記伸び状態の異常を判定するための異常判定閾値であり、
前記伸び状態判定手段により前記伸び状態が異常であると判定されたときに異常を報知する警告手段を備えることを特徴とするチェーン状態判定装置。
【請求項7】
請求項1から6のいずれか1項記載のチェーン状態判定装置において、
前記基準回転軸は、1つの前記駆動軸であり、
前記巻掛け伝動機構は、前記1つの駆動軸を共通の駆動軸とした第1巻掛け伝動機構および第2巻掛け伝動機構であり、
前記チェーンは、前記第1巻掛け伝動機構が備える第1チェーンおよび前記第2巻掛け伝動機構が備える第2チェーンであり、
前記駆動スプロケットは、前記第1巻掛け伝動機構が備える第1駆動スプロケットおよび前記第2巻掛け伝動機構が備える第2駆動スプロケットであり、
前記被動軸は、前記第1巻掛け伝動機構が備える第1被動軸および前記第2巻掛け伝動機構が備える第2被動軸であり、
前記被動スプロケットは、前記第1巻掛け伝動機構が備える第1被動スプロケットおよび前記第2巻掛け伝動機構が備える第2被動スプロケットであることを特徴とするチェーン状態判定装置。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−149445(P2011−149445A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2010−8703(P2010−8703)
【出願日】平成22年1月19日(2010.1.19)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成22年1月19日(2010.1.19)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]