
チャック装置
【課題】チャック装置において爪部の可動範囲の変更を容易に行う。
【解決手段】チャック装置5は、進退部材73を進退させる進退駆動部60、および、複数の爪部820を有する把持機構8を有する。把持機構8は、複数の爪部820に接続される複数の板カム部82、および、複数の爪部820の移動をガイドするガイド部を有する。板カム部82にはカム孔821が形成され、進退部材73に設けられたピン732がカム孔821に係合し、進退部材73の移動により、複数の爪部820のそれぞれが進退部材73の移動方向に垂直な方向に移動する。チャック装置5では、複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換可能である。これにより、チャック装置5において爪部の可動範囲の変更を容易に行うことができる。
【解決手段】チャック装置5は、進退部材73を進退させる進退駆動部60、および、複数の爪部820を有する把持機構8を有する。把持機構8は、複数の爪部820に接続される複数の板カム部82、および、複数の爪部820の移動をガイドするガイド部を有する。板カム部82にはカム孔821が形成され、進退部材73に設けられたピン732がカム孔821に係合し、進退部材73の移動により、複数の爪部820のそれぞれが進退部材73の移動方向に垂直な方向に移動する。チャック装置5では、複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換可能である。これにより、チャック装置5において爪部の可動範囲の変更を容易に行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークを把持するチャック装置に関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより、ロボットハンドが3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いたチャック装置の駆動により、ワークの把持および解放が行われる。特許文献1では、樹脂で形成される挟持体(爪部)と、金属で形成される挟持体とで、被把持物を安定して把持するチャック装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−237343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、特許文献1のように複数の爪部にてワークを把持するチャック装置として、様々なものが市販されており、把持対象のワークの形状やサイズ等に応じた可動範囲および個数の爪部を有するチャック装置がロボットハンドにて使用される。しかしながら、把持対象のワークが変更された場合には、チャック装置の全体を交換する必要があり、様々な形状やサイズのワークに対応するには、多数のチャック装置を準備する必要がある。
【0005】
本発明は上記課題に鑑みなされたものであり、チャック装置において爪部の可動範囲または爪部の個数の変更を容易に行うことを目的としている。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、ワークを把持するチャック装置であって、進退部材を進退させる進退駆動部と、複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構とを備え、前記把持機構が、前記進退駆動部に対して他の把持機構と交換可能であり、前記把持機構の前記他の把持機構への交換により、前記複数の爪部の可動範囲または前記複数の爪部の個数が変更される。
【0007】
請求項2に記載の発明は、請求項1に記載のチャック装置であって、前記把持機構が、前記複数の爪部に接続され、カム孔を有する複数の板カム部と、前記複数の爪部の移動をガイドするガイド部とを備え、前記進退部材が、前記カム孔に係合するピンを備え、前記把持機構の交換において、少なくとも前記複数の板カム部が、カム孔の形状が異なる他の複数の板カム部に交換される。
【0008】
請求項3に記載の発明は、請求項1に記載のチャック装置であって、前記把持機構および前記他の把持機構が、前記進退部材に対して連結および分離可能であるとともに前記進退駆動部からの力が伝達される部材を備える。
【0009】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載のチャック装置であって、前記進退駆動部が、前記進退部材の可動範囲が異なる他の進退駆動部に交換可能である。
【0010】
請求項5に記載の発明は、ワークを把持するチャック装置であって、進退部材を進退させる進退駆動部と、複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構とを備え、前記把持機構が、前記進退駆動部に対して着脱可能であり、前記進退駆動部を、前記進退部材の可動範囲が異なる他の進退駆動部に交換することにより、前記複数の爪部の可動範囲が変更される。
【発明の効果】
【0011】
請求項1ないし4の発明では、チャック装置において爪部の可動範囲または爪部の個数の変更を容易に行うことができ、請求項3の発明では、把持機構の交換をさらに容易に行うことができる。
【0012】
請求項5の発明では、チャック装置において爪部の可動範囲の変更を容易に行うことができる。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態に係る組立ロボットの側面図である。
【図2】ハンド先端部の側面図である。
【図3】チャック装置を示す図である。
【図4】チャック装置を示す図である。
【図5】チャック装置の分解図である。
【図6】チャック装置の動作を説明するための図である。
【図7】チャック装置の動作を説明するための図である。
【図8】他の板カム部を示す図である。
【図9】第2の実施の形態に係るチャック装置を示す図である。
【図10】他の進退駆動部を有するチャック装置を示す図である。
【図11】第3の実施の形態に係るチャック装置を示す図である。
【図12】チャック装置を示す図である。
【図13】第4の実施の形態に係るチャック装置を示す図である。
【図14】移動部材および係合端部を示す断面図である。
【図15】チャックユニットの他の例を示す図である。
【発明を実施するための形態】
【0014】
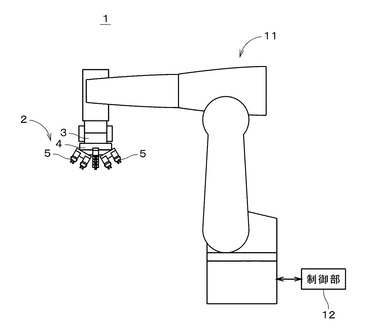
図1は、本発明の第1の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に着脱可能に取り付けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が自在に移動可能となる。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備え、ハンド先端部4にはワークを把持する複数のチャック装置5が設けられる。
【0015】
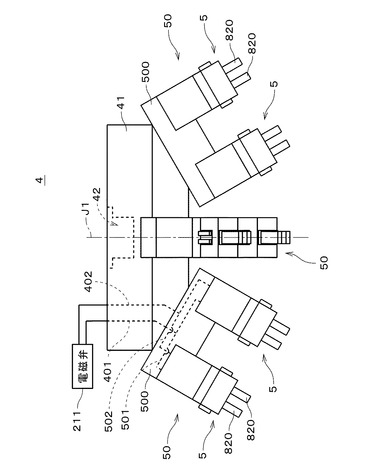
図2はハンド先端部4の側面図である。ハンド先端部4は、所定の中心軸J1を中心とする厚い略円板状の先端部本体41を有し、先端部本体41において図2中の上側(重力方向の上側であるとは限らない。以下同様。)の面の中央には、中心軸J1を中心とする結合穴42が形成される。ハンド先端部4がハンド本体部3に装着される際には、ハンド本体部3に設けられる結合機構の一部が、結合穴42内に挿入されてハンド先端部4とハンド本体部3とが結合される。
【0016】
先端部本体41において図2中の下側の部位には、複数のチャックユニット50が中心軸J1を中心とする周方向に等角度間隔にて取り付けられる。本実施の形態では、4個のチャックユニット50が90度間隔にて設けられる。各チャックユニット50は先端部本体41に接続されるベースブロック500を有し、各ベースブロック500に2つのチャック装置5が設けられる。各チャック装置5は複数の爪部820を有し、爪部820を図2中の下側に配置して、チャック装置5が図示省略のボルトによりベースブロック500に着脱可能に固定される。ベースブロック500の内部には圧縮エアの複数の流路501,502(1つのベースブロック500においてのみ破線にて図示している。)が形成されており、各流路501,502の一端はチャック装置5に接続され、他端はハンド先端部4(およびハンド本体部3)内に設けられた流路401,402を介して電磁弁211に接続される。ここでは、電磁弁211として5ポート2ポジションのシングルソレノイドが用いられる。
【0017】
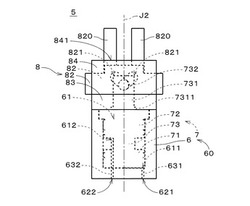
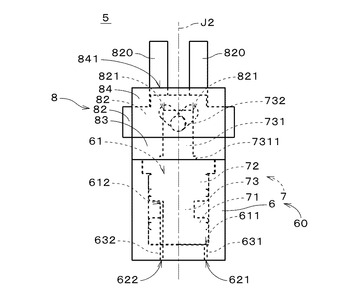
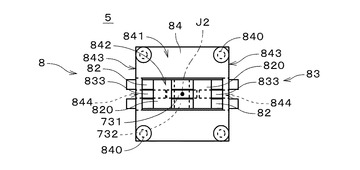
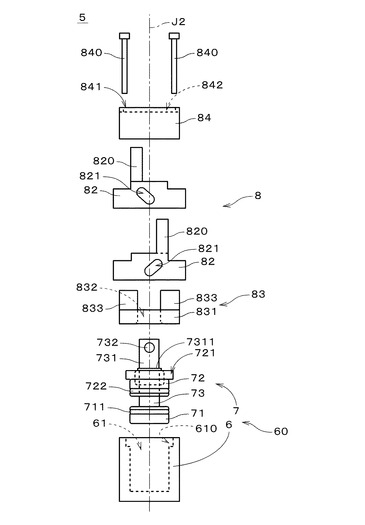
図3および図4はベースブロック500から取り外した状態における1つのチャック装置5の外観を示す図であり、図3は側方から見たチャック装置5を示し、図4は爪部820側から見たチャック装置5を示す。図5はチャック装置5の分解図である。図3および図5では爪部820を上側に配置してチャック装置5を図示している。
【0018】
把持部であるチャック装置5は、図3に示すように、把持本体部6、および、複数の爪部820を有する把持機構8を有する。把持本体部6の外形は直方体であり、内部には有底の穴部61が形成される。穴部61の側面は所定の中心軸J2を中心とする円筒面であり、図5に示すように、穴部61内にはピストンユニット7が挿入される。ピストンユニット7は、中心軸J2を中心とする円板状のピストン部71を有し、ピストン部71の爪部820側(図5中の上側)の主面上には中心軸J2を中心とする円柱状の軸部73が設けられる。ピストン部71の外周面にはパッキン711が設けられ、ピストン部71の外周面と穴部61の側面との間が密閉される。
【0019】
ピストンユニット7は、中心軸J2を中心とする円環状の環状部材72をさらに有し、軸部73が環状部材72に挿入される。環状部材72の爪部820側の部位は環状部材72の他の部位よりも直径が大きいフランジ部721となる。また、把持本体部6において穴部61の開口縁には穴部61の他の部位よりも直径が大きくなるように環状の切欠部610が形成され、環状部材72のフランジ部721が切欠部610に嵌合されて固定される。また、環状部材72の内周面側には、軸部73に設けられた後述のパッキン7311が位置しており、軸部73を中心軸J2に沿って移動可能としつつ、環状部材72の内周面と軸部73との間が密閉される。また、環状部材72の外周面にもパッキン722が設けられ、環状部材72の外周面と穴部61の側面との間が密閉される。このようにして、穴部61の開口が閉塞される。
【0020】
把持本体部6において、図3中の下側の面には2つの開口621,622が形成される。一方の開口621は把持本体部6内の内部流路631を介して穴部61の底面に設けられた内部開口611に連通する。他方の開口622は穴部61の側面上にて軸部73に対向する内部開口612に内部流路632を介して連通する。各開口621,622はベースブロック500内の流路501,502を介して電磁弁211に接続され(図2参照)、当該電磁弁211をONまたはOFFにすることにより一方の開口621,622に対応する内部開口611,612から穴部61内に圧縮エアが供給され、他方の内部開口612,611近傍が大気圧に戻される。
【0021】
実際には、ピストン部71に対向する内部開口611から穴部61内に圧縮エアを供給する際には、内部開口612近傍が大気圧とされ、ピストン部71が爪部820側(図3中の上側)へと移動する。内部開口612から穴部61内に圧縮エアを供給する際には、内部開口611近傍が大気圧とされ、ピストン部71が内部開口611側(図3中の下側)へと移動する。既述のようにピストン部71には軸部73が設けられており、電磁弁211のON/OFFを制御することにより、軸部73が中心軸J2に沿って進退する。以上のように、把持本体部6およびピストンユニット7は軸部73を進退させる進退駆動部である。以下の説明では、把持本体部6およびピストンユニット7の組合せを「進退駆動部60」と呼び、軸部73を「進退部材73」と呼ぶ。
【0022】
進退部材73の爪部820側の端部731(後述するように板カム部82と係合するため、以下、「係合端部731」という。)は薄い板状である。軸部73において、係合端部731の根元の周囲にはパッキン7311が設けられる。後述の中間部83(図5参照)には、パッキン7311の先端との干渉を避ける環状の切欠部が形成されており、パッキン7311の先端が当該切欠部内に収容可能となっている。係合端部731には貫通孔が形成されており、ピン732が当該貫通孔内に挿入される。ピン732の両端は係合端部731の両主面から突出する。
【0023】
把持機構8は、2つの爪部820、2つの爪部820にそれぞれ接続される2つの板カム部82、板カム部82と把持本体部6との間に設けられる中間部83、および、蓋部材84を備える。図5に示すように、中間部83は、ピストンユニット7の環状部材72上に設けられる板状部材831を有し、板状部材831の中央には係合端部731との干渉を避ける貫通孔832が形成される。また、板状部材831の爪部820側の主面上には、薄板状の2つのスペーサ板833が直立した状態で貫通孔832の周囲に配置される。チャック装置5では、図4に示すように、係合端部731が2つのスペーサ板833の間に配置され、板状の係合端部731および2つのスペーサ板833は中心軸J2を含む同一平面上に位置する。図5の中間部83の板状部材831および2つのスペーサ板833は一体的に形成される。
【0024】
2つの板カム部82は同形状であり、図5に示すように、一方の板カム部82を表裏反転し、進退部材73および2つのスペーサ板833を間に介在させて2つの板カム部82が向かい合うように(図4参照)、直立した状態で板状部材831上に配置される。また、各板カム部82にはカム孔821が形成されており、2つの板カム部82のカム孔821に進退部材73のピン732の両端が挿入される。
【0025】
蓋部材84は、ブロック状の部材において2つの板カム部82が配置される部位をくり貫いた形状であり、板カム部82に垂直かつ中心軸J2を含む断面が2つの板カム部82を跨ぐような形状となる。図4に示す蓋部材84において、板カム部82に垂直な2つの側面843のそれぞれには、板カム部82との干渉を避ける開口844が形成される。既述のように、各板カム部82において図3中の上側には、中心軸J2に沿って伸びる爪部820が接続され、蓋部材84における図3中の上側の面841(以下、「蓋面841」という。)には、図4に示すように爪部820との干渉を避ける開口842が形成される。開口842は図4中の横方向に長い矩形である。各板カム部82の爪部820は他方の板カム部82側に突出した形状であり、板カム部82の主面に垂直な方向における爪部820の厚さは、スペーサ板833および2つの板カム部82の厚さの和におよそ等しい。
【0026】
後述するように、図3のチャック装置5では進退部材73の中心軸J2に沿う移動により、ピン732が係合されたカム孔821に従って各板カム部82が爪部820と共に、図3中の横方向(以下、「爪移動方向」という。)に移動する。このとき、板カム部82および板カム部82に接続された爪部820の爪移動方向への移動は、中間部83の2つのスペーサ板833および板状部材831(図5参照)、並びに、蓋部材84の内面(すなわち、板カム部82に対向する面)および開口844の縁(図4参照)によりガイドされる。換言すれば、中間部83および蓋部材84は、複数の板カム部82および複数の爪部820の爪移動方向への移動をガイドするガイド部となる。
【0027】
爪部820側から中心軸J2に沿ってチャック装置5を見た場合に、図5に示す蓋部材84、中間部83の板状部材831および把持本体部6の外形は同じ大きさの矩形である。蓋部材84および板状部材831において、当該矩形の各角部に相当する位置にはボルト840が挿入される貫通孔が形成され、把持本体部6の対応する位置に形成されたねじ穴にてボルト840が締結されて蓋部材84および中間部83が進退駆動部60の把持本体部6に対して固定される。好ましくは、蓋部材84、中間部83および把持本体部6のそれぞれは樹脂の射出成形により形成され、これにより、これらの部材の軽量化および作製コストの削減が図られる。この場合に、ねじ穴等は必要に応じてインサート成形が行われ、一定の強度が確保されてよい。
【0028】
チャック装置5を組み立てる際には、図5に示すように、把持本体部6の穴部61内にピストンユニット7のピストン部71が挿入されて、環状部材72により穴部61の開口が閉塞される。続いて、ピストンユニット7の係合端部731を板状部材831の貫通孔832内に配置しつつ中間部83が環状部材72上に載置される。また、係合端部731のピン732をカム孔821に挿入しつつ、スペーサ板833の両主面側に2つの板カム部82が直立した状態で載置される。このとき、板カム部82の主面に垂直な方向に関して、各板カム部82に接続された爪部820が他方の板カム部82側に突出するように、2つの板カム部82が配置される。そして、爪部820を蓋面841の開口842内に配置しつつ蓋部材84が中間部83上に載置され、ボルト840にて蓋部材84および中間部83が進退駆動部60に対して固定される。以上の作業により、チャック装置5が容易に組み立てられる。
【0029】
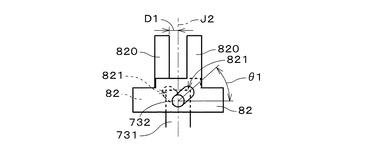
次に、チャック装置5の動作について述べる。図6および図7はチャック装置5の動作を説明するための図であり、図6および図7では説明の便宜上、係合端部731、板カム部82および爪部820のみを図示している。
【0030】
図6に示すように、各板カム部82では、爪移動方向(図6中の横方向)に関して爪部820が板カム部82の中央からずれた位置に配置される。カム孔821は板カム部82のおよそ中央から爪部820の根元に向かって伸びる形状とされ、その長手方向は爪移動方向および中心軸J2方向に対して傾斜する。既述のように、2つの板カム部82は同形状であり、チャック装置5では一方の板カム部82を表裏反転して配置されるため、係合端部731のピン732が最も爪部820から離れた状態を示す図6では、一方の板カム部82のカム孔821はピン732から図6中の右上に向かって伸びており、他方の板カム部82のカム孔821はピン732から図6中の左上に向かって伸びる。
【0031】
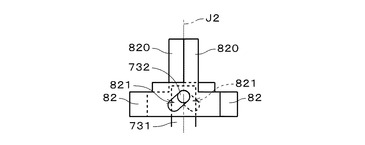
図3に示すピストン部71に対向する内部開口611から穴部61内に圧縮エアを供給すると、ピストン部71および進退部材73が爪部820側に向かって中心軸J2に沿って移動する。これにより、係合端部731のピン732が係合するカム孔821に従って、各板カム部82が進退部材73の移動方向に垂直な爪移動方向に移動し、図7に示すように2つの爪部820がほぼ接触する(近接を含む。)。また、図3に示す穴部61の側面に形成された内部開口612から穴部61内に圧縮エアを供給すると、ピストン部71および進退部材73が穴部61の底面側に向かって中心軸J2に沿って移動する。これにより、2つの爪部820が互いに離間するように、各板カム部82が爪移動方向に移動し、図6に示す状態に戻される。
【0032】
実際には、2つの爪部820が最も離れた図6に示す位置(以下、「全開位置」という。)から、最も接近した図7に示す位置(以下、「閉位置」という。)へと移動する途中に、2つの爪部820の間にワークが挟まれるため、正常にワークが把持される際には、爪部820は図7に示す閉位置まで移動しない(以下同様)。また、ワークを把持した状態にて、係合端部731を爪部820から離れるように中心軸J2に沿って移動する(すなわち、ピストン部71を穴部61の底面側に向かって移動する)ことにより、各爪部820が図6に示す全開位置へと移動し、ワークが解放される。
【0033】
図1に示す組立ロボット1では、ロボットアーム11によりロボットハンド2がワーク近傍に位置する際に、制御部12からの制御によりハンド本体部3の結合機構を含む部位が回転する。これにより、図2に示すハンド先端部4が複数のチャックユニット50と共に中心軸J1を中心として回転して1つのチャックユニット50がワークに対向する。このとき、各チャック装置5の爪部820は全開位置となっており、続いて、電磁弁211をONにすることにより、当該チャックユニット50の2つのチャック装置5にて2つのワークが同時に把持される。そして、ロボットアーム11によりロボットハンド2が組立体の近傍へと配置され、電磁弁211をOFFにすることにより2つのチャック装置5にて2つのワークが同時に解放される。
【0034】
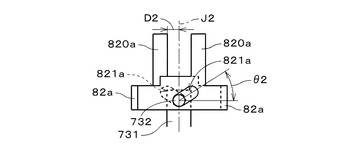
本実施の形態におけるチャック装置5では、把持機構8における板カム部82を他の板カム部に交換することにより、把持対象のワークに合わせて2つの爪部の全開位置を変更することが可能となっている。図8は他の板カム部82aを示す図であり、爪部820の全開位置を示す図6に対応する図である。
【0035】
図8に示す2つの板カム部82aは同形状であり、チャック装置5では、一方の板カム部82aを表裏反転し、両者が向かい合うように配置される。板カム部82aでは、カム孔821aの形状が図6および図7に示すカム孔821と相違している。詳細には、板カム部82aのカム孔821aの長手方向の長さは、板カム部82のカム孔821の長手方向の長さよりも大きく、カム孔821aの長手方向の爪移動方向(図8中の横方向)に対する傾斜角θ2は、図6のカム孔821の長手方向の爪移動方向に対する傾斜角θ1よりも小さい。板カム部82aでは、カム孔821aの進退駆動部60側(図8中の下側)の端部と爪部820aとの間の爪移動方向の距離が、図6の板カム部82における当該距離よりも長い。
【0036】
図3のチャック装置5において板カム部82を板カム部82aに交換する際には、ボルト840(図5参照)による締結を解除した後、蓋部材84が進退駆動部60から取り外され、板カム部82が爪部820と共に図8の板カム部82aおよび爪部820aに交換される。このとき、係合端部731のピン732が板カム部82aのカム孔821a内に係合される。そして、爪部820aを蓋面841の開口842(図4参照)内に配置しつつ蓋部材84が中間部83上に載置され、ボルト840にて蓋部材84および中間部83が進退駆動部60に対して固定される。以上の作業により、チャック装置5において板カム部が容易に交換される。把持機構8において板カム部82を、カム孔の形状が異なる他の板カム部82aに交換することは、把持機構8を進退駆動部60に対して他の把持機構に交換することと等価である。
【0037】
図8に示す2つの板カム部82aを用いるチャック装置5では、板カム部82aが上記形状のカム孔821aを有することにより、ピン732がカム孔821aの進退駆動部60側の端部に位置して2つの爪部820aが全開位置に配置された際の爪部820a間の距離が、図6に示す2つの板カム部82を用いる場合における全開位置での爪部820間の距離よりも大きくなる。また、ピン732がカム孔821aの爪部820a側の端部に位置して2つの爪部820aが閉位置に配置された際には、2つの爪部820aはほぼ接触する。したがって、図8の板カム部82aを用いるチャック装置5では、全開位置と閉位置との間における爪部820aの移動範囲(以下、「可動範囲」という。)D2が、図6の板カム部82における爪部820の可動範囲D1よりも大きくなる。
【0038】
以上に説明したように、進退駆動部60および把持機構8を有するチャック装置5では、把持機構8が進退駆動部60に対して他の把持機構と交換可能とされ、把持機構8の当該他の把持機構への交換により、複数の爪部の可動範囲(または、可動距離)が変更される。このように、チャック装置5では、進退駆動部60を維持しつつ(すなわち、交換することなく)、把持機構の交換のみにより爪部の可動範囲の変更を容易に行うことができる。
【0039】
ここで、把持機構や進退駆動部の交換が不能なチャック装置を比較例として想定する。比較例のチャック装置を用いるロボットハンドの設計および製作の際には、把持対象のワークの形状やサイズ等に応じた可動範囲および個数の爪部を有するチャック装置が選定される。しかしながら、把持対象のワークが変更された場合には、チャック装置を再度選定する必要があり、当該チャック装置の変更に伴ってロボットハンドにおいて当該チャック装置の支持部材(ベースブロック)の設計変更も必要となる。
【0040】
これに対し、図3のチャック装置5では、把持機構8と進退駆動部60とが分離可能とされ、把持機構8を他の把持機構に交換することにより、爪部の可動範囲が変更される。これにより、共通の進退駆動部60を用いることができ、把持対象のワークが変更された場合でも、把持機構のみを交換して対応することができ、ベースブロックの設計変更を行う必要もない。なお、爪部の個数を変更する場合については後述の第3の実施の形態にて説明する。
【0041】
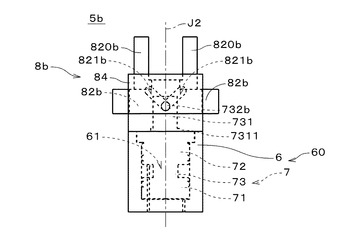
図9は、本発明の第2の実施の形態に係るチャック装置5bを示す図であり、図3に対応する図である。図9のチャック装置5bでは、図3のチャック装置5と同様に、把持機構8bの板カム部82bが爪部820bと一体的に形成されており、チャック装置5と比較して板カム部82bにおけるカム孔821bの形状、および、係合端部731に設けられるピン732bの大きさ(直径)のみが相違している。他の構成は図3と同様であり、同符号を付す。
【0042】
図9に示す係合端部731のピン732bの直径は、図3のピン732に比べて小さく、カム孔821bの長手方向に垂直な幅も、ピン732bの直径に合わせて図3のカム孔821よりも細い。カム孔821bは、板カム部82bの中央近傍から爪部820bの根元に向かって伸びる形状であり、長手方向の長さはカム孔821よりも長い。チャック装置5bでは、図9に示す状態が2つの爪部820bが最も離れた全開位置であり、このとき、係合端部731のピン732bがカム孔821bの進退駆動部60側の端部に位置する。また、閉位置では、ピン732bがカム孔821bの爪部820b側の端部に位置し、2つの爪部820bがほぼ接触する。
【0043】
チャック装置5bでは、把持本体部6およびピストンユニット7を有する進退駆動部60が進退部材73の中心軸J2方向における可動範囲が異なる他の進退駆動部に交換可能である。具体的には、図5のチャック装置5と同様に、ボルト840(図5参照)による締結を解除して、蓋部材84が進退駆動部60から取り外される。また、板カム部82bが係合端部731のピン732bから取り外され、進退駆動部60と、把持機構8bの各構成要素とが分離される。続いて、他の進退駆動部(後述の進退駆動部60b)が準備され、図5のチャック装置5の場合と同様にして、当該他の進退駆動部と把持機構8bとを用いてチャック装置が組み立てられる。
【0044】
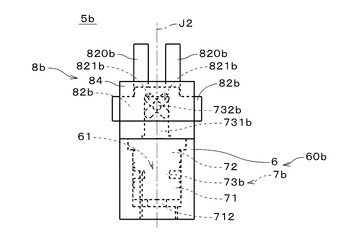
図10は、他の進退駆動部60bを有するチャック装置5bを示す図である。図10に示す進退駆動部60bにおけるピストンユニット7bでは、ピストン部71の底面に突起部712が形成される。ピストン部71の穴部61の底面側への移動時には、突起部712が穴部61の底面と当接して、ピストン部71と穴部61の底面との間に、図9のピストンユニット7に比べて広い隙間が形成される。換言すれば、ピストンユニット7bでは、ピストン部71の穴部61の底面側への移動完了時におけるピストン部71と環状部材72との間の中心軸J2方向の距離が、ピストンユニット7よりも狭い。これにより、進退部材73bの中心軸J2方向における可動範囲が、ピストンユニット7よりも短くなる。
【0045】
図10のチャック装置5bでは、ピストン部71が最も穴部61の底面に近接する際に、2つの爪部820bが全開位置となる。このとき、係合端部731bのピン732bがカム孔821bの長手方向における中央近傍に位置するため、全開位置における2つの爪部820b間の距離が、図9のチャック装置5bよりも短くなる。また、ピストン部71が環状部材72とおよそ当接する際に、2つの爪部820bが閉位置となる。このとき、係合端部731bのピン732bがカム孔821bの爪部820b側の端部に位置し、図9のチャック装置5bと同様に、2つの爪部820bがほぼ接触する。以上のように、図10のチャック装置5bでは、図9のチャック装置5bよりも爪部820bの可動範囲が短くなる。
【0046】
なお、図9の進退駆動部60の把持本体部6と、図10の進退駆動部60bの把持本体部6は同形状であるため、進退駆動部の交換に伴ってチャック装置5bを保持するベースブロック500(図2参照)を交換する必要はない。また、進退駆動部60においてピストンユニット7のみがピストンユニット7bに交換されてもよく、この場合も、進退駆動部60を他の進退駆動部に交換することと等価である。
【0047】
以上に説明したように、チャック装置5bでは、把持機構8bが進退駆動部60に対して着脱可能とされ、進退駆動部60を、進退部材の可動範囲が異なる他の進退駆動部60bに交換することにより、複数の爪部820bの可動範囲が変更される。このように、チャック装置5では、把持機構8bを維持しつつ、進退駆動部の交換のみにより爪部820bの可動範囲の変更を容易に行うことができる。
【0048】
進退駆動部を進退部材の可動範囲が異なる他の進退駆動部に交換する上記手法は、把持機構を他の把持機構に交換することにより複数の爪部の可動範囲を変更する図3のチャック装置5にて用いられてもよい。このようなチャック装置5では、進退駆動部60が他の進退駆動部に交換可能であることにより、複数の把持機構および複数の進退駆動部を様々に組み合わせることができ、爪部の様々な可動範囲および開閉動作特性を実現することができる。
【0049】
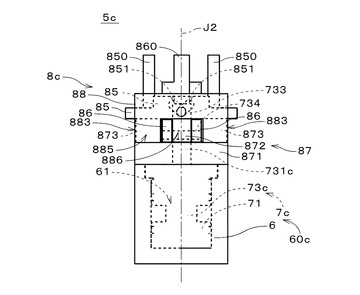
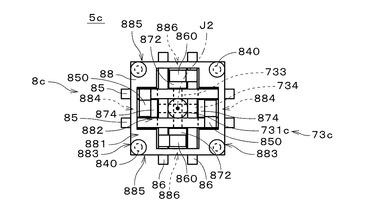
図11および図12は、本発明の第3の実施の形態に係るチャック装置5cを示す図であり、それぞれ図3および図4に対応する図である。図12に示すように、チャック装置5cでは、進退部材73cにおける係合端部731cの中心軸J2に垂直な断面が円であり、係合端部731cから図12中の縦方向の両側に突出する第1ピン733、および、係合端部731cから図12中の横方向の両側に突出する第2ピン734が係合端部731cに設けられる。図11に示すように、第1ピン733は係合端部731cの先端近傍に設けられ、第2ピン734は第1ピン733と把持本体部6との間に設けられる。
【0050】
図11および図12に示すように、第1ピン733の両端部は2つの第1板カム部85のカム孔851に係合し、係合端部731cを挟んで2つの第1板カム部85が互いに対向して配置される。また、第2ピン734の両端部は2つの第2板カム部86のカム孔(第1板カム部85のカム孔851と同形状である。)に係合し、係合端部731cを挟んで2つの第2板カム部86が互いに対向して配置される。
【0051】
蓋部材88は、ブロック状の部材において2つの第1板カム部85および2つの第2板カム部86が配置される部位をくり貫いた形状であり、中心軸J2に垂直な断面形状が図12に示す蓋部材88の蓋面811(後述の十字状の開口882が形成された蓋面811)とおよそ同形状である(すなわち、矩形から十字状の部位を除いた形状である。)。蓋部材88において、第1板カム部85に垂直な2つの側面883のそれぞれには、第1板カム部85との干渉を避ける開口884が形成され、第2板カム部86に垂直な2つの側面885のそれぞれには、第2板カム部86との干渉を避ける開口886が形成される。図11に示すように、開口886の把持本体部6側の縁は蓋部材88には形成されておらず、蓋部材88の側面885は門形状である。図12に示す蓋部材88の側面883の開口884も同様に門形状である。蓋部材88の蓋面881には、第1板カム部85に接続された爪部850、および、第2板カム部86に接続された爪部860との干渉を避ける十字状の開口882が形成される。
【0052】
図11に示す中間部87は板状部材871を有し、板状部材871上には、図4のスペーサ板833と同様に、係合端部731cを挟みつつ2つの第2板カム部86の間に配置される2つのスペーサ部872が設けられる(図12参照)。また、図11に示す板状部材871上には、2つの第2板カム部86を挟むようにして、2つの支持ブロック873が形成される。爪部860および第2板カム部86は、板状部材871、スペーサ部872、支持ブロック873、並びに、蓋部材88の内面(第2板カム部86に対向する部分)および開口886の縁(図12参照)により、蓋部材88の側面885に垂直な方向への移動がガイドされる。
【0053】
また、図11の各支持ブロック873上には、2つの第1板カム部85の間に配置されるスペーサ部874(図12参照)が設けられる。爪部850および第1板カム部85は、支持ブロック873、スペーサ部874、並びに、蓋部材88の内面(第1板カム部85に対向する部分)および開口884の縁(図12参照)により、蓋部材88の側面883に垂直な方向への移動がガイドされる。なお、各支持ブロック873には、後述のチャック装置5cの分解および組立作業において、第2ピン734の取り外しおよび取り付けを行うための貫通孔が形成されている。
【0054】
チャック装置5cでは、ピストン部71が爪部850,860側に向かって移動することにより、4つの爪部850,860が互いに最も近接する閉位置へと到達する。また、ピストン部71が穴部61の底面に向かって移動することにより、4つの爪部850,860が互いに最も離れた全開位置へと位置する。
【0055】
図11のチャック装置5cでは、爪部の個数を変更することが可能となっている。具体的には、図5のチャック装置5と同様に、ボルト840(図12参照)による締結を解除して、蓋部材88が進退駆動部60c(すなわち、ピストンユニット7cおよび把持本体部6)から取り外される。続いて、2つの第1板カム部85および2つの第2板カム部86が係合端部731c(の第1ピン733および第2ピン734)から取り外された後、2つの第1板カム部85のみが再度、係合端部731cに取り付けられる。そして、蓋部材88が中間部87上に載置され、ボルト840にて蓋部材88および中間部87が進退駆動部60cに対して固定される。以上の作業により、チャック装置5cにおいて爪部の個数が2つに変更される。
【0056】
チャック装置5cの把持機構8cにおいて2つの第2板カム部86および爪部860を取り除くことは、把持機構8cを進退駆動部60cに対して他の把持機構に交換することと等価である。把持機構8cにおいて2つの第2板カム部86を省略した他の把持機構が予め準備され、図11の把持機構8cが当該他の把持機構に交換されることにより、爪部の個数が変更されてもよい。
【0057】
以上に説明したように、図11のチャック装置5cでは、把持機構8cが進退駆動部60cに対して他の把持機構と交換可能とされ、把持機構8cの他の把持機構への交換により、複数の爪部の個数が変更される。これにより、チャック装置5では、進退駆動部60cを維持しつつ、把持機構の交換のみにより爪部の個数の変更を容易に行うことができる。
【0058】
図11のチャック装置5cにおいてピストンユニット7cおよび把持機構8cを、図3のピストンユニット7および把持機構8に交換することにより、チャック装置5と同様のチャック装置が構成され、把持本体部6を維持しつつ、爪部820の個数が変更されてもよい。なお、図3の蓋部材84と図11の蓋部材88は外形が同じであるため、樹脂成形の際に中子を取り替えるのみで容易に作製可能である。また、図11のチャック装置5cにおいて、板カム部85,86をカム孔の形状が異なる他の板カム部に交換することにより、複数の爪部の可動範囲が変更されてもよい。
【0059】
進退駆動部を進退部材の可動範囲が異なる他の進退駆動部に交換する第2の実施の形態に係る手法が、把持機構を他の把持機構に交換することにより複数の爪部の個数を変更する図11のチャック装置5cにて用いられてもよい。複数の把持機構および複数の進退駆動部を様々に組み合わせることにより、様々な個数の爪部にて様々な可動範囲を実現することができる。
【0060】
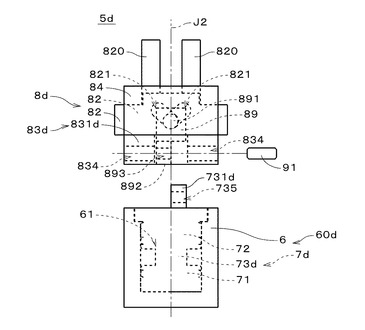
図13は、本発明の第4の実施の形態に係るチャック装置5dを示す図である。図13では、進退駆動部60dと把持機構8dとを分離して図示している。図13のチャック装置5dでは、図3のチャック装置5と比較して、把持機構8dに後述の移動部材89が追加されるとともに、中間部83dおよびピストンユニット7dの進退部材73dの構造が相違する。他の構成は図3と同様であり同符号を付す。
【0061】
チャック装置5dでは、進退部材73dの係合端部731dが中心軸J2に対して図13中の右側にずれた位置に形成される。また、把持機構8dでは、板カム部82のカム孔821に係合するピン891を有する部材89(後述するように、進退駆動部60dからの力が伝達されて移動する部材であるため、以下、「移動部材89」という。)が設けられる。移動部材89は進退駆動部60d側に突出する突出部892を有し、突出部892は中心軸J2に対して図13中の左側にずれた位置に形成される。
【0062】
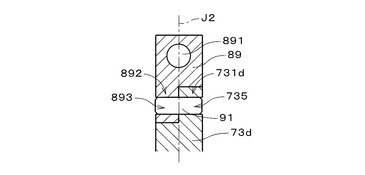
図14は、移動部材89および係合端部731dを示す図であり、これらの部材を中心軸J2を含む面にて切断した断面図である。図14では、移動部材89と進退部材73dとが連結した状態を示している。
【0063】
移動部材89の突出部892には中心軸J2に垂直な方向に伸びる貫通孔893が形成され、進退部材73dの係合端部731dにも中心軸J2に垂直な方向に伸びる貫通孔735が形成される。把持機構8dと進退駆動部60dとが連結した状態では、突出部892における図14中の右側の面と、係合端部731dにおける図14中の左側の面とが当接し、貫通孔893および貫通孔735に1つの連結ピン91が嵌合される。これにより、図13の進退駆動部60dにおける進退部材73dの移動に合わせて、把持機構8dの移動部材89が移動し、爪部820が中心軸J2に垂直な方向へと移動する。このように、チャック装置5dでは、進退駆動部60dからの力が移動部材89に伝達され、ワークの把持および解放が行われる。
【0064】
チャック装置5dにおいて把持機構8dを爪部の可動範囲または爪部の個数が異なる他の把持機構に交換する際には、ボルト840(図5参照)による締結を解除した後、中間部83dの板状部材831dに設けられた連絡孔834から連結ピン91の端面を押すことにより、連結ピン91が貫通孔893および貫通孔735から抜かれて進退駆動部60dと把持機構8dとが分離される。続いて、当該他の把持機構(ただし、把持機構8dと同様の移動部材89および中間部83dを有する。)が進退駆動部60d上に載置され、連絡孔834から連結ピン91を貫通孔893および貫通孔735内に挿入することにより、当該他の把持機構が進退駆動部60dに連結される。当該他の把持機構はボルト840にて進退駆動部60dに対して固定される。なお、連絡孔834を閉塞する部材を設けることにより、チャック装置の駆動時における連結ピン91の脱落が防止されてよい。
【0065】
以上に説明したように、図13のチャック装置5dでは、把持機構8dおよび交換後の把持機構が、進退部材73dに対して連結および分離可能であるとともに進退駆動部60dからの力が伝達される移動部材89を有する。これにより、把持機構の交換をさらに容易に行うことができ、爪部の可動範囲または爪部の個数の変更を短時間にて行うことが可能となる。チャック装置5dにおいて、進退駆動部を進退部材の可動範囲が異なる他の進退駆動部に交換する第2の実施の形態に係る手法が用いられてもよく、これにより、進退駆動部の交換をさらに容易に行うことができる。
【0066】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0067】
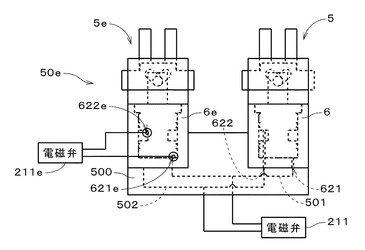
図2に示すチャックユニット50では、2つのチャック装置5にて同時にワークの把持または解放動作が行われるが、チャックユニット50の2つのチャック装置5にて個別にワークの把持または解放動作が行われてもよい。例えば、図15に示すように、チャックユニット50eに設けられる2つのチャック装置5,5eのうち一方のチャック装置5eの把持本体部6eにおいて、一の側面に2つの開口621e,622eが形成され、チューブ等を介して電磁弁211eに接続される。また、ベースブロック500の流路501,502におけるチャック装置5e側の分岐流路は把持本体部6eにおける図15中の下側の面により閉塞される。これにより、図15のチャックユニット50eでは、一方のチャック装置5eにおけるワークの把持および解放動作が電磁弁211eのON/OFFにより制御され、他方のチャック装置5におけるワークの把持および解放動作が電磁弁211のON/OFFにより制御される。なお、ロボットハンド2の設計によっては、各チャック装置5,5eの2つの開口が2つの電磁弁にそれぞれ接続されて、ワークの把持および解放動作が実現されてもよい。
【0068】
図3のチャック装置5では、爪部の可動範囲の変更において、板カム部82と共に、把持機構8における他の構成要素(蓋部材84および中間部83)が同様のものに交換されてもよい(すなわち、把持機構8の全体が交換されてよい。)。また、板カム部82と爪部820とが分離可能とされ、板カム部82のみが交換されてもよい。チャック装置5では、把持機構の交換において、少なくとも複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換されることにより、爪部の可動範囲を変更することが可能となる。
【0069】
また、図3、図9および図13のチャック装置5,5b,5dでは、閉位置において爪部が完全に閉じなくてもよい。この場合に、把持機構または進退駆動部の交換前後において、必ずしも爪部の可動距離が変更される必要はなく、爪部の可動距離は同じであるが、爪移動方向における爪部の移動範囲が相違する(すなわち、全開位置および閉位置が相違する)ようにして、爪部の可動範囲が変更されてもよい。
【0070】
上記第1ないし第4の実施の形態では、チャック装置5,5b〜5dが板カム部を有することにより、把持機構の構成を簡素化することができるが、チャック装置の設計によっては、他の機構(例えば、リンク機構)により、進退部材の中心軸J2方向への移動による爪部の爪移動方向への移動が実現されてもよい。
【0071】
図9および図10のチャック装置5bにおいて、例えば、共通のピストンユニット7を用いつつ、一方の進退駆動部において、把持本体部の穴部内にピストン部71の移動を制限する部位を形成することにより、進退部材の可動範囲が異なる2つの進退駆動部が作製されてもよい。すなわち、進退部材の可動範囲が相違する複数の進退駆動部は、様々な態様にて実現されてよい。
【0072】
図13のチャック装置5dにおいて、進退駆動部60dと把持機構8dとの連結は他の手法により行われてもよい。例えば、円柱状の係合端部の先端にて両側に突出する突出部が形成される。また、把持機構における移動部材が係合端部よりも直径が大きい円筒状であり、その内周面において、進退駆動部側の端部から連続する結合用の案内溝が形成される。そして、進退駆動部と把持機構とを連結する際に、進退駆動部における係合端部の突出部が、把持機構における移動部材の案内溝の奥へと導かれ、進退駆動部と把持機構とが着脱可能に連結される。
【0073】
チャック装置5,5b〜5dでは、把持機構が異なる形状の爪部を有する他の把持機構に交換されてもよい。また、チャック装置5,5b〜5dにおける爪部および板カム部の個数は、2および4以外に、3あるいは5以上であってもよい。
【0074】
進退駆動部における進退部材の駆動は、圧縮エア以外の水や油等の流体により実現されてもよく、また、ソレノイドやモータにより進退部材が進退してもよい。
【0075】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0076】
5,5b〜5e チャック装置
8,8b〜8d 把持機構
60,60b〜60d 進退駆動部
73,73b〜73d 進退部材
82,85,86,82a,82b 板カム部
83,87,83d 中間部
84,88 蓋部材
89 移動部材
732〜734,732b,891 ピン
820,850,860,820a,820b 爪部
821,851,821a,821b カム孔
D1,D2 可動範囲
【技術分野】
【0001】
本発明は、ワークを把持するチャック装置に関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより、ロボットハンドが3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いたチャック装置の駆動により、ワークの把持および解放が行われる。特許文献1では、樹脂で形成される挟持体(爪部)と、金属で形成される挟持体とで、被把持物を安定して把持するチャック装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−237343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、特許文献1のように複数の爪部にてワークを把持するチャック装置として、様々なものが市販されており、把持対象のワークの形状やサイズ等に応じた可動範囲および個数の爪部を有するチャック装置がロボットハンドにて使用される。しかしながら、把持対象のワークが変更された場合には、チャック装置の全体を交換する必要があり、様々な形状やサイズのワークに対応するには、多数のチャック装置を準備する必要がある。
【0005】
本発明は上記課題に鑑みなされたものであり、チャック装置において爪部の可動範囲または爪部の個数の変更を容易に行うことを目的としている。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、ワークを把持するチャック装置であって、進退部材を進退させる進退駆動部と、複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構とを備え、前記把持機構が、前記進退駆動部に対して他の把持機構と交換可能であり、前記把持機構の前記他の把持機構への交換により、前記複数の爪部の可動範囲または前記複数の爪部の個数が変更される。
【0007】
請求項2に記載の発明は、請求項1に記載のチャック装置であって、前記把持機構が、前記複数の爪部に接続され、カム孔を有する複数の板カム部と、前記複数の爪部の移動をガイドするガイド部とを備え、前記進退部材が、前記カム孔に係合するピンを備え、前記把持機構の交換において、少なくとも前記複数の板カム部が、カム孔の形状が異なる他の複数の板カム部に交換される。
【0008】
請求項3に記載の発明は、請求項1に記載のチャック装置であって、前記把持機構および前記他の把持機構が、前記進退部材に対して連結および分離可能であるとともに前記進退駆動部からの力が伝達される部材を備える。
【0009】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載のチャック装置であって、前記進退駆動部が、前記進退部材の可動範囲が異なる他の進退駆動部に交換可能である。
【0010】
請求項5に記載の発明は、ワークを把持するチャック装置であって、進退部材を進退させる進退駆動部と、複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構とを備え、前記把持機構が、前記進退駆動部に対して着脱可能であり、前記進退駆動部を、前記進退部材の可動範囲が異なる他の進退駆動部に交換することにより、前記複数の爪部の可動範囲が変更される。
【発明の効果】
【0011】
請求項1ないし4の発明では、チャック装置において爪部の可動範囲または爪部の個数の変更を容易に行うことができ、請求項3の発明では、把持機構の交換をさらに容易に行うことができる。
【0012】
請求項5の発明では、チャック装置において爪部の可動範囲の変更を容易に行うことができる。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態に係る組立ロボットの側面図である。
【図2】ハンド先端部の側面図である。
【図3】チャック装置を示す図である。
【図4】チャック装置を示す図である。
【図5】チャック装置の分解図である。
【図6】チャック装置の動作を説明するための図である。
【図7】チャック装置の動作を説明するための図である。
【図8】他の板カム部を示す図である。
【図9】第2の実施の形態に係るチャック装置を示す図である。
【図10】他の進退駆動部を有するチャック装置を示す図である。
【図11】第3の実施の形態に係るチャック装置を示す図である。
【図12】チャック装置を示す図である。
【図13】第4の実施の形態に係るチャック装置を示す図である。
【図14】移動部材および係合端部を示す断面図である。
【図15】チャックユニットの他の例を示す図である。
【発明を実施するための形態】
【0014】
図1は、本発明の第1の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に着脱可能に取り付けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が自在に移動可能となる。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備え、ハンド先端部4にはワークを把持する複数のチャック装置5が設けられる。
【0015】
図2はハンド先端部4の側面図である。ハンド先端部4は、所定の中心軸J1を中心とする厚い略円板状の先端部本体41を有し、先端部本体41において図2中の上側(重力方向の上側であるとは限らない。以下同様。)の面の中央には、中心軸J1を中心とする結合穴42が形成される。ハンド先端部4がハンド本体部3に装着される際には、ハンド本体部3に設けられる結合機構の一部が、結合穴42内に挿入されてハンド先端部4とハンド本体部3とが結合される。
【0016】
先端部本体41において図2中の下側の部位には、複数のチャックユニット50が中心軸J1を中心とする周方向に等角度間隔にて取り付けられる。本実施の形態では、4個のチャックユニット50が90度間隔にて設けられる。各チャックユニット50は先端部本体41に接続されるベースブロック500を有し、各ベースブロック500に2つのチャック装置5が設けられる。各チャック装置5は複数の爪部820を有し、爪部820を図2中の下側に配置して、チャック装置5が図示省略のボルトによりベースブロック500に着脱可能に固定される。ベースブロック500の内部には圧縮エアの複数の流路501,502(1つのベースブロック500においてのみ破線にて図示している。)が形成されており、各流路501,502の一端はチャック装置5に接続され、他端はハンド先端部4(およびハンド本体部3)内に設けられた流路401,402を介して電磁弁211に接続される。ここでは、電磁弁211として5ポート2ポジションのシングルソレノイドが用いられる。
【0017】
図3および図4はベースブロック500から取り外した状態における1つのチャック装置5の外観を示す図であり、図3は側方から見たチャック装置5を示し、図4は爪部820側から見たチャック装置5を示す。図5はチャック装置5の分解図である。図3および図5では爪部820を上側に配置してチャック装置5を図示している。
【0018】
把持部であるチャック装置5は、図3に示すように、把持本体部6、および、複数の爪部820を有する把持機構8を有する。把持本体部6の外形は直方体であり、内部には有底の穴部61が形成される。穴部61の側面は所定の中心軸J2を中心とする円筒面であり、図5に示すように、穴部61内にはピストンユニット7が挿入される。ピストンユニット7は、中心軸J2を中心とする円板状のピストン部71を有し、ピストン部71の爪部820側(図5中の上側)の主面上には中心軸J2を中心とする円柱状の軸部73が設けられる。ピストン部71の外周面にはパッキン711が設けられ、ピストン部71の外周面と穴部61の側面との間が密閉される。
【0019】
ピストンユニット7は、中心軸J2を中心とする円環状の環状部材72をさらに有し、軸部73が環状部材72に挿入される。環状部材72の爪部820側の部位は環状部材72の他の部位よりも直径が大きいフランジ部721となる。また、把持本体部6において穴部61の開口縁には穴部61の他の部位よりも直径が大きくなるように環状の切欠部610が形成され、環状部材72のフランジ部721が切欠部610に嵌合されて固定される。また、環状部材72の内周面側には、軸部73に設けられた後述のパッキン7311が位置しており、軸部73を中心軸J2に沿って移動可能としつつ、環状部材72の内周面と軸部73との間が密閉される。また、環状部材72の外周面にもパッキン722が設けられ、環状部材72の外周面と穴部61の側面との間が密閉される。このようにして、穴部61の開口が閉塞される。
【0020】
把持本体部6において、図3中の下側の面には2つの開口621,622が形成される。一方の開口621は把持本体部6内の内部流路631を介して穴部61の底面に設けられた内部開口611に連通する。他方の開口622は穴部61の側面上にて軸部73に対向する内部開口612に内部流路632を介して連通する。各開口621,622はベースブロック500内の流路501,502を介して電磁弁211に接続され(図2参照)、当該電磁弁211をONまたはOFFにすることにより一方の開口621,622に対応する内部開口611,612から穴部61内に圧縮エアが供給され、他方の内部開口612,611近傍が大気圧に戻される。
【0021】
実際には、ピストン部71に対向する内部開口611から穴部61内に圧縮エアを供給する際には、内部開口612近傍が大気圧とされ、ピストン部71が爪部820側(図3中の上側)へと移動する。内部開口612から穴部61内に圧縮エアを供給する際には、内部開口611近傍が大気圧とされ、ピストン部71が内部開口611側(図3中の下側)へと移動する。既述のようにピストン部71には軸部73が設けられており、電磁弁211のON/OFFを制御することにより、軸部73が中心軸J2に沿って進退する。以上のように、把持本体部6およびピストンユニット7は軸部73を進退させる進退駆動部である。以下の説明では、把持本体部6およびピストンユニット7の組合せを「進退駆動部60」と呼び、軸部73を「進退部材73」と呼ぶ。
【0022】
進退部材73の爪部820側の端部731(後述するように板カム部82と係合するため、以下、「係合端部731」という。)は薄い板状である。軸部73において、係合端部731の根元の周囲にはパッキン7311が設けられる。後述の中間部83(図5参照)には、パッキン7311の先端との干渉を避ける環状の切欠部が形成されており、パッキン7311の先端が当該切欠部内に収容可能となっている。係合端部731には貫通孔が形成されており、ピン732が当該貫通孔内に挿入される。ピン732の両端は係合端部731の両主面から突出する。
【0023】
把持機構8は、2つの爪部820、2つの爪部820にそれぞれ接続される2つの板カム部82、板カム部82と把持本体部6との間に設けられる中間部83、および、蓋部材84を備える。図5に示すように、中間部83は、ピストンユニット7の環状部材72上に設けられる板状部材831を有し、板状部材831の中央には係合端部731との干渉を避ける貫通孔832が形成される。また、板状部材831の爪部820側の主面上には、薄板状の2つのスペーサ板833が直立した状態で貫通孔832の周囲に配置される。チャック装置5では、図4に示すように、係合端部731が2つのスペーサ板833の間に配置され、板状の係合端部731および2つのスペーサ板833は中心軸J2を含む同一平面上に位置する。図5の中間部83の板状部材831および2つのスペーサ板833は一体的に形成される。
【0024】
2つの板カム部82は同形状であり、図5に示すように、一方の板カム部82を表裏反転し、進退部材73および2つのスペーサ板833を間に介在させて2つの板カム部82が向かい合うように(図4参照)、直立した状態で板状部材831上に配置される。また、各板カム部82にはカム孔821が形成されており、2つの板カム部82のカム孔821に進退部材73のピン732の両端が挿入される。
【0025】
蓋部材84は、ブロック状の部材において2つの板カム部82が配置される部位をくり貫いた形状であり、板カム部82に垂直かつ中心軸J2を含む断面が2つの板カム部82を跨ぐような形状となる。図4に示す蓋部材84において、板カム部82に垂直な2つの側面843のそれぞれには、板カム部82との干渉を避ける開口844が形成される。既述のように、各板カム部82において図3中の上側には、中心軸J2に沿って伸びる爪部820が接続され、蓋部材84における図3中の上側の面841(以下、「蓋面841」という。)には、図4に示すように爪部820との干渉を避ける開口842が形成される。開口842は図4中の横方向に長い矩形である。各板カム部82の爪部820は他方の板カム部82側に突出した形状であり、板カム部82の主面に垂直な方向における爪部820の厚さは、スペーサ板833および2つの板カム部82の厚さの和におよそ等しい。
【0026】
後述するように、図3のチャック装置5では進退部材73の中心軸J2に沿う移動により、ピン732が係合されたカム孔821に従って各板カム部82が爪部820と共に、図3中の横方向(以下、「爪移動方向」という。)に移動する。このとき、板カム部82および板カム部82に接続された爪部820の爪移動方向への移動は、中間部83の2つのスペーサ板833および板状部材831(図5参照)、並びに、蓋部材84の内面(すなわち、板カム部82に対向する面)および開口844の縁(図4参照)によりガイドされる。換言すれば、中間部83および蓋部材84は、複数の板カム部82および複数の爪部820の爪移動方向への移動をガイドするガイド部となる。
【0027】
爪部820側から中心軸J2に沿ってチャック装置5を見た場合に、図5に示す蓋部材84、中間部83の板状部材831および把持本体部6の外形は同じ大きさの矩形である。蓋部材84および板状部材831において、当該矩形の各角部に相当する位置にはボルト840が挿入される貫通孔が形成され、把持本体部6の対応する位置に形成されたねじ穴にてボルト840が締結されて蓋部材84および中間部83が進退駆動部60の把持本体部6に対して固定される。好ましくは、蓋部材84、中間部83および把持本体部6のそれぞれは樹脂の射出成形により形成され、これにより、これらの部材の軽量化および作製コストの削減が図られる。この場合に、ねじ穴等は必要に応じてインサート成形が行われ、一定の強度が確保されてよい。
【0028】
チャック装置5を組み立てる際には、図5に示すように、把持本体部6の穴部61内にピストンユニット7のピストン部71が挿入されて、環状部材72により穴部61の開口が閉塞される。続いて、ピストンユニット7の係合端部731を板状部材831の貫通孔832内に配置しつつ中間部83が環状部材72上に載置される。また、係合端部731のピン732をカム孔821に挿入しつつ、スペーサ板833の両主面側に2つの板カム部82が直立した状態で載置される。このとき、板カム部82の主面に垂直な方向に関して、各板カム部82に接続された爪部820が他方の板カム部82側に突出するように、2つの板カム部82が配置される。そして、爪部820を蓋面841の開口842内に配置しつつ蓋部材84が中間部83上に載置され、ボルト840にて蓋部材84および中間部83が進退駆動部60に対して固定される。以上の作業により、チャック装置5が容易に組み立てられる。
【0029】
次に、チャック装置5の動作について述べる。図6および図7はチャック装置5の動作を説明するための図であり、図6および図7では説明の便宜上、係合端部731、板カム部82および爪部820のみを図示している。
【0030】
図6に示すように、各板カム部82では、爪移動方向(図6中の横方向)に関して爪部820が板カム部82の中央からずれた位置に配置される。カム孔821は板カム部82のおよそ中央から爪部820の根元に向かって伸びる形状とされ、その長手方向は爪移動方向および中心軸J2方向に対して傾斜する。既述のように、2つの板カム部82は同形状であり、チャック装置5では一方の板カム部82を表裏反転して配置されるため、係合端部731のピン732が最も爪部820から離れた状態を示す図6では、一方の板カム部82のカム孔821はピン732から図6中の右上に向かって伸びており、他方の板カム部82のカム孔821はピン732から図6中の左上に向かって伸びる。
【0031】
図3に示すピストン部71に対向する内部開口611から穴部61内に圧縮エアを供給すると、ピストン部71および進退部材73が爪部820側に向かって中心軸J2に沿って移動する。これにより、係合端部731のピン732が係合するカム孔821に従って、各板カム部82が進退部材73の移動方向に垂直な爪移動方向に移動し、図7に示すように2つの爪部820がほぼ接触する(近接を含む。)。また、図3に示す穴部61の側面に形成された内部開口612から穴部61内に圧縮エアを供給すると、ピストン部71および進退部材73が穴部61の底面側に向かって中心軸J2に沿って移動する。これにより、2つの爪部820が互いに離間するように、各板カム部82が爪移動方向に移動し、図6に示す状態に戻される。
【0032】
実際には、2つの爪部820が最も離れた図6に示す位置(以下、「全開位置」という。)から、最も接近した図7に示す位置(以下、「閉位置」という。)へと移動する途中に、2つの爪部820の間にワークが挟まれるため、正常にワークが把持される際には、爪部820は図7に示す閉位置まで移動しない(以下同様)。また、ワークを把持した状態にて、係合端部731を爪部820から離れるように中心軸J2に沿って移動する(すなわち、ピストン部71を穴部61の底面側に向かって移動する)ことにより、各爪部820が図6に示す全開位置へと移動し、ワークが解放される。
【0033】
図1に示す組立ロボット1では、ロボットアーム11によりロボットハンド2がワーク近傍に位置する際に、制御部12からの制御によりハンド本体部3の結合機構を含む部位が回転する。これにより、図2に示すハンド先端部4が複数のチャックユニット50と共に中心軸J1を中心として回転して1つのチャックユニット50がワークに対向する。このとき、各チャック装置5の爪部820は全開位置となっており、続いて、電磁弁211をONにすることにより、当該チャックユニット50の2つのチャック装置5にて2つのワークが同時に把持される。そして、ロボットアーム11によりロボットハンド2が組立体の近傍へと配置され、電磁弁211をOFFにすることにより2つのチャック装置5にて2つのワークが同時に解放される。
【0034】
本実施の形態におけるチャック装置5では、把持機構8における板カム部82を他の板カム部に交換することにより、把持対象のワークに合わせて2つの爪部の全開位置を変更することが可能となっている。図8は他の板カム部82aを示す図であり、爪部820の全開位置を示す図6に対応する図である。
【0035】
図8に示す2つの板カム部82aは同形状であり、チャック装置5では、一方の板カム部82aを表裏反転し、両者が向かい合うように配置される。板カム部82aでは、カム孔821aの形状が図6および図7に示すカム孔821と相違している。詳細には、板カム部82aのカム孔821aの長手方向の長さは、板カム部82のカム孔821の長手方向の長さよりも大きく、カム孔821aの長手方向の爪移動方向(図8中の横方向)に対する傾斜角θ2は、図6のカム孔821の長手方向の爪移動方向に対する傾斜角θ1よりも小さい。板カム部82aでは、カム孔821aの進退駆動部60側(図8中の下側)の端部と爪部820aとの間の爪移動方向の距離が、図6の板カム部82における当該距離よりも長い。
【0036】
図3のチャック装置5において板カム部82を板カム部82aに交換する際には、ボルト840(図5参照)による締結を解除した後、蓋部材84が進退駆動部60から取り外され、板カム部82が爪部820と共に図8の板カム部82aおよび爪部820aに交換される。このとき、係合端部731のピン732が板カム部82aのカム孔821a内に係合される。そして、爪部820aを蓋面841の開口842(図4参照)内に配置しつつ蓋部材84が中間部83上に載置され、ボルト840にて蓋部材84および中間部83が進退駆動部60に対して固定される。以上の作業により、チャック装置5において板カム部が容易に交換される。把持機構8において板カム部82を、カム孔の形状が異なる他の板カム部82aに交換することは、把持機構8を進退駆動部60に対して他の把持機構に交換することと等価である。
【0037】
図8に示す2つの板カム部82aを用いるチャック装置5では、板カム部82aが上記形状のカム孔821aを有することにより、ピン732がカム孔821aの進退駆動部60側の端部に位置して2つの爪部820aが全開位置に配置された際の爪部820a間の距離が、図6に示す2つの板カム部82を用いる場合における全開位置での爪部820間の距離よりも大きくなる。また、ピン732がカム孔821aの爪部820a側の端部に位置して2つの爪部820aが閉位置に配置された際には、2つの爪部820aはほぼ接触する。したがって、図8の板カム部82aを用いるチャック装置5では、全開位置と閉位置との間における爪部820aの移動範囲(以下、「可動範囲」という。)D2が、図6の板カム部82における爪部820の可動範囲D1よりも大きくなる。
【0038】
以上に説明したように、進退駆動部60および把持機構8を有するチャック装置5では、把持機構8が進退駆動部60に対して他の把持機構と交換可能とされ、把持機構8の当該他の把持機構への交換により、複数の爪部の可動範囲(または、可動距離)が変更される。このように、チャック装置5では、進退駆動部60を維持しつつ(すなわち、交換することなく)、把持機構の交換のみにより爪部の可動範囲の変更を容易に行うことができる。
【0039】
ここで、把持機構や進退駆動部の交換が不能なチャック装置を比較例として想定する。比較例のチャック装置を用いるロボットハンドの設計および製作の際には、把持対象のワークの形状やサイズ等に応じた可動範囲および個数の爪部を有するチャック装置が選定される。しかしながら、把持対象のワークが変更された場合には、チャック装置を再度選定する必要があり、当該チャック装置の変更に伴ってロボットハンドにおいて当該チャック装置の支持部材(ベースブロック)の設計変更も必要となる。
【0040】
これに対し、図3のチャック装置5では、把持機構8と進退駆動部60とが分離可能とされ、把持機構8を他の把持機構に交換することにより、爪部の可動範囲が変更される。これにより、共通の進退駆動部60を用いることができ、把持対象のワークが変更された場合でも、把持機構のみを交換して対応することができ、ベースブロックの設計変更を行う必要もない。なお、爪部の個数を変更する場合については後述の第3の実施の形態にて説明する。
【0041】
図9は、本発明の第2の実施の形態に係るチャック装置5bを示す図であり、図3に対応する図である。図9のチャック装置5bでは、図3のチャック装置5と同様に、把持機構8bの板カム部82bが爪部820bと一体的に形成されており、チャック装置5と比較して板カム部82bにおけるカム孔821bの形状、および、係合端部731に設けられるピン732bの大きさ(直径)のみが相違している。他の構成は図3と同様であり、同符号を付す。
【0042】
図9に示す係合端部731のピン732bの直径は、図3のピン732に比べて小さく、カム孔821bの長手方向に垂直な幅も、ピン732bの直径に合わせて図3のカム孔821よりも細い。カム孔821bは、板カム部82bの中央近傍から爪部820bの根元に向かって伸びる形状であり、長手方向の長さはカム孔821よりも長い。チャック装置5bでは、図9に示す状態が2つの爪部820bが最も離れた全開位置であり、このとき、係合端部731のピン732bがカム孔821bの進退駆動部60側の端部に位置する。また、閉位置では、ピン732bがカム孔821bの爪部820b側の端部に位置し、2つの爪部820bがほぼ接触する。
【0043】
チャック装置5bでは、把持本体部6およびピストンユニット7を有する進退駆動部60が進退部材73の中心軸J2方向における可動範囲が異なる他の進退駆動部に交換可能である。具体的には、図5のチャック装置5と同様に、ボルト840(図5参照)による締結を解除して、蓋部材84が進退駆動部60から取り外される。また、板カム部82bが係合端部731のピン732bから取り外され、進退駆動部60と、把持機構8bの各構成要素とが分離される。続いて、他の進退駆動部(後述の進退駆動部60b)が準備され、図5のチャック装置5の場合と同様にして、当該他の進退駆動部と把持機構8bとを用いてチャック装置が組み立てられる。
【0044】
図10は、他の進退駆動部60bを有するチャック装置5bを示す図である。図10に示す進退駆動部60bにおけるピストンユニット7bでは、ピストン部71の底面に突起部712が形成される。ピストン部71の穴部61の底面側への移動時には、突起部712が穴部61の底面と当接して、ピストン部71と穴部61の底面との間に、図9のピストンユニット7に比べて広い隙間が形成される。換言すれば、ピストンユニット7bでは、ピストン部71の穴部61の底面側への移動完了時におけるピストン部71と環状部材72との間の中心軸J2方向の距離が、ピストンユニット7よりも狭い。これにより、進退部材73bの中心軸J2方向における可動範囲が、ピストンユニット7よりも短くなる。
【0045】
図10のチャック装置5bでは、ピストン部71が最も穴部61の底面に近接する際に、2つの爪部820bが全開位置となる。このとき、係合端部731bのピン732bがカム孔821bの長手方向における中央近傍に位置するため、全開位置における2つの爪部820b間の距離が、図9のチャック装置5bよりも短くなる。また、ピストン部71が環状部材72とおよそ当接する際に、2つの爪部820bが閉位置となる。このとき、係合端部731bのピン732bがカム孔821bの爪部820b側の端部に位置し、図9のチャック装置5bと同様に、2つの爪部820bがほぼ接触する。以上のように、図10のチャック装置5bでは、図9のチャック装置5bよりも爪部820bの可動範囲が短くなる。
【0046】
なお、図9の進退駆動部60の把持本体部6と、図10の進退駆動部60bの把持本体部6は同形状であるため、進退駆動部の交換に伴ってチャック装置5bを保持するベースブロック500(図2参照)を交換する必要はない。また、進退駆動部60においてピストンユニット7のみがピストンユニット7bに交換されてもよく、この場合も、進退駆動部60を他の進退駆動部に交換することと等価である。
【0047】
以上に説明したように、チャック装置5bでは、把持機構8bが進退駆動部60に対して着脱可能とされ、進退駆動部60を、進退部材の可動範囲が異なる他の進退駆動部60bに交換することにより、複数の爪部820bの可動範囲が変更される。このように、チャック装置5では、把持機構8bを維持しつつ、進退駆動部の交換のみにより爪部820bの可動範囲の変更を容易に行うことができる。
【0048】
進退駆動部を進退部材の可動範囲が異なる他の進退駆動部に交換する上記手法は、把持機構を他の把持機構に交換することにより複数の爪部の可動範囲を変更する図3のチャック装置5にて用いられてもよい。このようなチャック装置5では、進退駆動部60が他の進退駆動部に交換可能であることにより、複数の把持機構および複数の進退駆動部を様々に組み合わせることができ、爪部の様々な可動範囲および開閉動作特性を実現することができる。
【0049】
図11および図12は、本発明の第3の実施の形態に係るチャック装置5cを示す図であり、それぞれ図3および図4に対応する図である。図12に示すように、チャック装置5cでは、進退部材73cにおける係合端部731cの中心軸J2に垂直な断面が円であり、係合端部731cから図12中の縦方向の両側に突出する第1ピン733、および、係合端部731cから図12中の横方向の両側に突出する第2ピン734が係合端部731cに設けられる。図11に示すように、第1ピン733は係合端部731cの先端近傍に設けられ、第2ピン734は第1ピン733と把持本体部6との間に設けられる。
【0050】
図11および図12に示すように、第1ピン733の両端部は2つの第1板カム部85のカム孔851に係合し、係合端部731cを挟んで2つの第1板カム部85が互いに対向して配置される。また、第2ピン734の両端部は2つの第2板カム部86のカム孔(第1板カム部85のカム孔851と同形状である。)に係合し、係合端部731cを挟んで2つの第2板カム部86が互いに対向して配置される。
【0051】
蓋部材88は、ブロック状の部材において2つの第1板カム部85および2つの第2板カム部86が配置される部位をくり貫いた形状であり、中心軸J2に垂直な断面形状が図12に示す蓋部材88の蓋面811(後述の十字状の開口882が形成された蓋面811)とおよそ同形状である(すなわち、矩形から十字状の部位を除いた形状である。)。蓋部材88において、第1板カム部85に垂直な2つの側面883のそれぞれには、第1板カム部85との干渉を避ける開口884が形成され、第2板カム部86に垂直な2つの側面885のそれぞれには、第2板カム部86との干渉を避ける開口886が形成される。図11に示すように、開口886の把持本体部6側の縁は蓋部材88には形成されておらず、蓋部材88の側面885は門形状である。図12に示す蓋部材88の側面883の開口884も同様に門形状である。蓋部材88の蓋面881には、第1板カム部85に接続された爪部850、および、第2板カム部86に接続された爪部860との干渉を避ける十字状の開口882が形成される。
【0052】
図11に示す中間部87は板状部材871を有し、板状部材871上には、図4のスペーサ板833と同様に、係合端部731cを挟みつつ2つの第2板カム部86の間に配置される2つのスペーサ部872が設けられる(図12参照)。また、図11に示す板状部材871上には、2つの第2板カム部86を挟むようにして、2つの支持ブロック873が形成される。爪部860および第2板カム部86は、板状部材871、スペーサ部872、支持ブロック873、並びに、蓋部材88の内面(第2板カム部86に対向する部分)および開口886の縁(図12参照)により、蓋部材88の側面885に垂直な方向への移動がガイドされる。
【0053】
また、図11の各支持ブロック873上には、2つの第1板カム部85の間に配置されるスペーサ部874(図12参照)が設けられる。爪部850および第1板カム部85は、支持ブロック873、スペーサ部874、並びに、蓋部材88の内面(第1板カム部85に対向する部分)および開口884の縁(図12参照)により、蓋部材88の側面883に垂直な方向への移動がガイドされる。なお、各支持ブロック873には、後述のチャック装置5cの分解および組立作業において、第2ピン734の取り外しおよび取り付けを行うための貫通孔が形成されている。
【0054】
チャック装置5cでは、ピストン部71が爪部850,860側に向かって移動することにより、4つの爪部850,860が互いに最も近接する閉位置へと到達する。また、ピストン部71が穴部61の底面に向かって移動することにより、4つの爪部850,860が互いに最も離れた全開位置へと位置する。
【0055】
図11のチャック装置5cでは、爪部の個数を変更することが可能となっている。具体的には、図5のチャック装置5と同様に、ボルト840(図12参照)による締結を解除して、蓋部材88が進退駆動部60c(すなわち、ピストンユニット7cおよび把持本体部6)から取り外される。続いて、2つの第1板カム部85および2つの第2板カム部86が係合端部731c(の第1ピン733および第2ピン734)から取り外された後、2つの第1板カム部85のみが再度、係合端部731cに取り付けられる。そして、蓋部材88が中間部87上に載置され、ボルト840にて蓋部材88および中間部87が進退駆動部60cに対して固定される。以上の作業により、チャック装置5cにおいて爪部の個数が2つに変更される。
【0056】
チャック装置5cの把持機構8cにおいて2つの第2板カム部86および爪部860を取り除くことは、把持機構8cを進退駆動部60cに対して他の把持機構に交換することと等価である。把持機構8cにおいて2つの第2板カム部86を省略した他の把持機構が予め準備され、図11の把持機構8cが当該他の把持機構に交換されることにより、爪部の個数が変更されてもよい。
【0057】
以上に説明したように、図11のチャック装置5cでは、把持機構8cが進退駆動部60cに対して他の把持機構と交換可能とされ、把持機構8cの他の把持機構への交換により、複数の爪部の個数が変更される。これにより、チャック装置5では、進退駆動部60cを維持しつつ、把持機構の交換のみにより爪部の個数の変更を容易に行うことができる。
【0058】
図11のチャック装置5cにおいてピストンユニット7cおよび把持機構8cを、図3のピストンユニット7および把持機構8に交換することにより、チャック装置5と同様のチャック装置が構成され、把持本体部6を維持しつつ、爪部820の個数が変更されてもよい。なお、図3の蓋部材84と図11の蓋部材88は外形が同じであるため、樹脂成形の際に中子を取り替えるのみで容易に作製可能である。また、図11のチャック装置5cにおいて、板カム部85,86をカム孔の形状が異なる他の板カム部に交換することにより、複数の爪部の可動範囲が変更されてもよい。
【0059】
進退駆動部を進退部材の可動範囲が異なる他の進退駆動部に交換する第2の実施の形態に係る手法が、把持機構を他の把持機構に交換することにより複数の爪部の個数を変更する図11のチャック装置5cにて用いられてもよい。複数の把持機構および複数の進退駆動部を様々に組み合わせることにより、様々な個数の爪部にて様々な可動範囲を実現することができる。
【0060】
図13は、本発明の第4の実施の形態に係るチャック装置5dを示す図である。図13では、進退駆動部60dと把持機構8dとを分離して図示している。図13のチャック装置5dでは、図3のチャック装置5と比較して、把持機構8dに後述の移動部材89が追加されるとともに、中間部83dおよびピストンユニット7dの進退部材73dの構造が相違する。他の構成は図3と同様であり同符号を付す。
【0061】
チャック装置5dでは、進退部材73dの係合端部731dが中心軸J2に対して図13中の右側にずれた位置に形成される。また、把持機構8dでは、板カム部82のカム孔821に係合するピン891を有する部材89(後述するように、進退駆動部60dからの力が伝達されて移動する部材であるため、以下、「移動部材89」という。)が設けられる。移動部材89は進退駆動部60d側に突出する突出部892を有し、突出部892は中心軸J2に対して図13中の左側にずれた位置に形成される。
【0062】
図14は、移動部材89および係合端部731dを示す図であり、これらの部材を中心軸J2を含む面にて切断した断面図である。図14では、移動部材89と進退部材73dとが連結した状態を示している。
【0063】
移動部材89の突出部892には中心軸J2に垂直な方向に伸びる貫通孔893が形成され、進退部材73dの係合端部731dにも中心軸J2に垂直な方向に伸びる貫通孔735が形成される。把持機構8dと進退駆動部60dとが連結した状態では、突出部892における図14中の右側の面と、係合端部731dにおける図14中の左側の面とが当接し、貫通孔893および貫通孔735に1つの連結ピン91が嵌合される。これにより、図13の進退駆動部60dにおける進退部材73dの移動に合わせて、把持機構8dの移動部材89が移動し、爪部820が中心軸J2に垂直な方向へと移動する。このように、チャック装置5dでは、進退駆動部60dからの力が移動部材89に伝達され、ワークの把持および解放が行われる。
【0064】
チャック装置5dにおいて把持機構8dを爪部の可動範囲または爪部の個数が異なる他の把持機構に交換する際には、ボルト840(図5参照)による締結を解除した後、中間部83dの板状部材831dに設けられた連絡孔834から連結ピン91の端面を押すことにより、連結ピン91が貫通孔893および貫通孔735から抜かれて進退駆動部60dと把持機構8dとが分離される。続いて、当該他の把持機構(ただし、把持機構8dと同様の移動部材89および中間部83dを有する。)が進退駆動部60d上に載置され、連絡孔834から連結ピン91を貫通孔893および貫通孔735内に挿入することにより、当該他の把持機構が進退駆動部60dに連結される。当該他の把持機構はボルト840にて進退駆動部60dに対して固定される。なお、連絡孔834を閉塞する部材を設けることにより、チャック装置の駆動時における連結ピン91の脱落が防止されてよい。
【0065】
以上に説明したように、図13のチャック装置5dでは、把持機構8dおよび交換後の把持機構が、進退部材73dに対して連結および分離可能であるとともに進退駆動部60dからの力が伝達される移動部材89を有する。これにより、把持機構の交換をさらに容易に行うことができ、爪部の可動範囲または爪部の個数の変更を短時間にて行うことが可能となる。チャック装置5dにおいて、進退駆動部を進退部材の可動範囲が異なる他の進退駆動部に交換する第2の実施の形態に係る手法が用いられてもよく、これにより、進退駆動部の交換をさらに容易に行うことができる。
【0066】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0067】
図2に示すチャックユニット50では、2つのチャック装置5にて同時にワークの把持または解放動作が行われるが、チャックユニット50の2つのチャック装置5にて個別にワークの把持または解放動作が行われてもよい。例えば、図15に示すように、チャックユニット50eに設けられる2つのチャック装置5,5eのうち一方のチャック装置5eの把持本体部6eにおいて、一の側面に2つの開口621e,622eが形成され、チューブ等を介して電磁弁211eに接続される。また、ベースブロック500の流路501,502におけるチャック装置5e側の分岐流路は把持本体部6eにおける図15中の下側の面により閉塞される。これにより、図15のチャックユニット50eでは、一方のチャック装置5eにおけるワークの把持および解放動作が電磁弁211eのON/OFFにより制御され、他方のチャック装置5におけるワークの把持および解放動作が電磁弁211のON/OFFにより制御される。なお、ロボットハンド2の設計によっては、各チャック装置5,5eの2つの開口が2つの電磁弁にそれぞれ接続されて、ワークの把持および解放動作が実現されてもよい。
【0068】
図3のチャック装置5では、爪部の可動範囲の変更において、板カム部82と共に、把持機構8における他の構成要素(蓋部材84および中間部83)が同様のものに交換されてもよい(すなわち、把持機構8の全体が交換されてよい。)。また、板カム部82と爪部820とが分離可能とされ、板カム部82のみが交換されてもよい。チャック装置5では、把持機構の交換において、少なくとも複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換されることにより、爪部の可動範囲を変更することが可能となる。
【0069】
また、図3、図9および図13のチャック装置5,5b,5dでは、閉位置において爪部が完全に閉じなくてもよい。この場合に、把持機構または進退駆動部の交換前後において、必ずしも爪部の可動距離が変更される必要はなく、爪部の可動距離は同じであるが、爪移動方向における爪部の移動範囲が相違する(すなわち、全開位置および閉位置が相違する)ようにして、爪部の可動範囲が変更されてもよい。
【0070】
上記第1ないし第4の実施の形態では、チャック装置5,5b〜5dが板カム部を有することにより、把持機構の構成を簡素化することができるが、チャック装置の設計によっては、他の機構(例えば、リンク機構)により、進退部材の中心軸J2方向への移動による爪部の爪移動方向への移動が実現されてもよい。
【0071】
図9および図10のチャック装置5bにおいて、例えば、共通のピストンユニット7を用いつつ、一方の進退駆動部において、把持本体部の穴部内にピストン部71の移動を制限する部位を形成することにより、進退部材の可動範囲が異なる2つの進退駆動部が作製されてもよい。すなわち、進退部材の可動範囲が相違する複数の進退駆動部は、様々な態様にて実現されてよい。
【0072】
図13のチャック装置5dにおいて、進退駆動部60dと把持機構8dとの連結は他の手法により行われてもよい。例えば、円柱状の係合端部の先端にて両側に突出する突出部が形成される。また、把持機構における移動部材が係合端部よりも直径が大きい円筒状であり、その内周面において、進退駆動部側の端部から連続する結合用の案内溝が形成される。そして、進退駆動部と把持機構とを連結する際に、進退駆動部における係合端部の突出部が、把持機構における移動部材の案内溝の奥へと導かれ、進退駆動部と把持機構とが着脱可能に連結される。
【0073】
チャック装置5,5b〜5dでは、把持機構が異なる形状の爪部を有する他の把持機構に交換されてもよい。また、チャック装置5,5b〜5dにおける爪部および板カム部の個数は、2および4以外に、3あるいは5以上であってもよい。
【0074】
進退駆動部における進退部材の駆動は、圧縮エア以外の水や油等の流体により実現されてもよく、また、ソレノイドやモータにより進退部材が進退してもよい。
【0075】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0076】
5,5b〜5e チャック装置
8,8b〜8d 把持機構
60,60b〜60d 進退駆動部
73,73b〜73d 進退部材
82,85,86,82a,82b 板カム部
83,87,83d 中間部
84,88 蓋部材
89 移動部材
732〜734,732b,891 ピン
820,850,860,820a,820b 爪部
821,851,821a,821b カム孔
D1,D2 可動範囲
【特許請求の範囲】
【請求項1】
ワークを把持するチャック装置であって、
進退部材を進退させる進退駆動部と、
複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構と、
を備え、
前記把持機構が、前記進退駆動部に対して他の把持機構と交換可能であり、
前記把持機構の前記他の把持機構への交換により、前記複数の爪部の可動範囲または前記複数の爪部の個数が変更されることを特徴とするチャック装置。
【請求項2】
請求項1に記載のチャック装置であって、
前記把持機構が、
前記複数の爪部に接続され、カム孔を有する複数の板カム部と、
前記複数の爪部の移動をガイドするガイド部と、
を備え、
前記進退部材が、前記カム孔に係合するピンを備え、
前記把持機構の交換において、少なくとも前記複数の板カム部が、カム孔の形状が異なる他の複数の板カム部に交換されることを特徴とするチャック装置。
【請求項3】
請求項1に記載のチャック装置であって、
前記把持機構および前記他の把持機構が、前記進退部材に対して連結および分離可能であるとともに前記進退駆動部からの力が伝達される部材を備えることを特徴とするチャック装置。
【請求項4】
請求項1ないし3のいずれかに記載のチャック装置であって、
前記進退駆動部が、前記進退部材の可動範囲が異なる他の進退駆動部に交換可能であることを特徴とするチャック装置。
【請求項5】
ワークを把持するチャック装置であって、
進退部材を進退させる進退駆動部と、
複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構と、
を備え、
前記把持機構が、前記進退駆動部に対して着脱可能であり、
前記進退駆動部を、前記進退部材の可動範囲が異なる他の進退駆動部に交換することにより、前記複数の爪部の可動範囲が変更されることを特徴とするチャック装置。
【請求項1】
ワークを把持するチャック装置であって、
進退部材を進退させる進退駆動部と、
複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構と、
を備え、
前記把持機構が、前記進退駆動部に対して他の把持機構と交換可能であり、
前記把持機構の前記他の把持機構への交換により、前記複数の爪部の可動範囲または前記複数の爪部の個数が変更されることを特徴とするチャック装置。
【請求項2】
請求項1に記載のチャック装置であって、
前記把持機構が、
前記複数の爪部に接続され、カム孔を有する複数の板カム部と、
前記複数の爪部の移動をガイドするガイド部と、
を備え、
前記進退部材が、前記カム孔に係合するピンを備え、
前記把持機構の交換において、少なくとも前記複数の板カム部が、カム孔の形状が異なる他の複数の板カム部に交換されることを特徴とするチャック装置。
【請求項3】
請求項1に記載のチャック装置であって、
前記把持機構および前記他の把持機構が、前記進退部材に対して連結および分離可能であるとともに前記進退駆動部からの力が伝達される部材を備えることを特徴とするチャック装置。
【請求項4】
請求項1ないし3のいずれかに記載のチャック装置であって、
前記進退駆動部が、前記進退部材の可動範囲が異なる他の進退駆動部に交換可能であることを特徴とするチャック装置。
【請求項5】
ワークを把持するチャック装置であって、
進退部材を進退させる進退駆動部と、
複数の爪部を有し、前記進退部材の移動により、前記複数の爪部のそれぞれを前記進退部材の移動方向に垂直な方向に移動する把持機構と、
を備え、
前記把持機構が、前記進退駆動部に対して着脱可能であり、
前記進退駆動部を、前記進退部材の可動範囲が異なる他の進退駆動部に交換することにより、前記複数の爪部の可動範囲が変更されることを特徴とするチャック装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−101299(P2012−101299A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−250101(P2010−250101)
【出願日】平成22年11月8日(2010.11.8)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月8日(2010.11.8)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
[ Back to top ]