
チャンネルインパルス応答の推定方法
時間に依存するチャンネルのインパルス応答を推定するために、超音波信号等の連続的なインパルス信号が送信され、上記チャンネルから受信される対応する信号がサンプリングされる。インパルス信号の行列の逆行列が計算され、上記受信信号のサンプルへ適用される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、その環境又はその内部の1つ以上のオブジェクト(対象物)のマッピングを可能にする、インパルスに対するチャンネル応答を推定することに関し、特に音響インパルスを使用したものに関するが、それに限定するものではない。本発明は、特に、環境におけるリアルタイムの変化を測定することに関する。
【背景技術】
【0002】
環境に関する情報を得るために音響信号を使用し得ることが望ましいアプリケーションは、多種多様に存在する。例としては、人の追跡、人間とコンピュータとのインターフェース、海底マッピング、医療用超音波画像化診断、音響スキャナ、セキュリティ装置、及びロボットビジョンが含まれる。光ではなく音響信号を使用することには、例えば、光の状態に反応しないこと、人間が感知し得ない周波数で良く動作すること、向上された、又は簡単化された遠近感をもたらすことができること、といったいくつかの優位点をもつことが可能である。
【0003】
音響マッピングの基本原理は、短いバースト又はインパルスを環境内へ送信し、環境内における関心が持たれたオブジェクトからの反射を測定してそれに関する何か、通常はそのサイズ、形状又は位置を決定するというものである。これは、当該技術においては、チャンネルのインパルス応答の推定、又は単にチャンネル推定として知られている。音響モニタリングのためのチャンネル推定において遭遇する主たる障害は、望ましくないエコーによるものであり、これは事実上すべての現実的なアプリケーションにおいて発生する。チャンネル及び観察者の双方が静的であれば、これは重大な問題ではない。しかしながら、システムにおいて時間的に変換する何らかの要素が存在していれば、その変化を測定するためにインパルスを繰り返し送信する必要がある。送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合は、問題が生じる。図1a乃至図1dを参照して、この問題を説明する。
【0004】
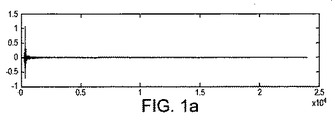
図1aは、所定の出力装置(例えば、ラウドスピーカ又はトランスデューサ)を介してインパルスが駆動され、結果的に生じる信号が所定の入力装置(例えば、マイクロホン、センサ)を介して受信される様子を示す。インパルス応答は時系列で示され、ここで、横軸は時間軸であり、縦軸は所定の時間における応答(例えば、圧力)を示す。推定されるインパルス応答は、チャンネルに関する重要な情報をもたらすことができ、従って、周囲環境、オブジェクト(「反射体」)の位置、変形及び形状に関する重要な情報をもたらすことができる。インパルス応答の推定は、無線通信から医療用画像化処理及び地震探査までに及ぶ、広範囲の信号処理アプリケーションの基礎である。
【0005】
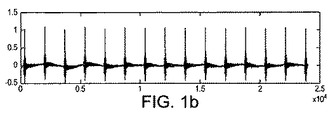
しかしながら、周囲環境が変化する可能性がある多数の状況が存在し、また、他の方法でもチャンネルは変化する。この変化は、モニタリング可能であることが望ましい。明らかに、最良の時間的分解能をもたらすためには、インパルス応答を可能な限り高頻度で測定する必要があるであろう。これを実行するための自明な方法は、図1(b)に示すようにインパルスをより高頻度で送信することであるようにも思われるが、これによって発生する問題がある。インパルスが先のインパルスのすぐ後で送信されると、図1(b)における主ピーク間の波状のパターンからわかるように、最初のインパルス応答からのエコーが次の推定に「影響を与える」。従って、チャンネルの推定のそれぞれは、その直前の推定によってある程度歪められる。これは、所望の信号をマスクするという点でノイズの一種ではあるが、信号強度を増大させたり、又は連続する推定値を平均化したりすることにより克服できるランダムな環境ノイズとは異なる。むしろこれは、これが信号自体から引き出されるものであって、当然ながら本来の目的であるチャンネルを完全に知ることなくしては訂正不可能であるという点で、「構造的」なノイズである。
【0006】
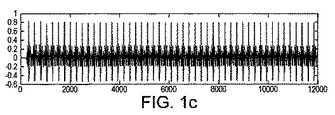
この問題の深刻さは、図1(c)に示すように、出力インパルスがさらに高頻度で送信される場合に増大する。図1(c)の波形からの単一の「インパルス応答スライス」(図1(d)参照)を見て、これを、ただ1つのインパルスが送信された場合である図1(a)における対応する応答に比較すると、この例では、物理的なチャンネルに変化はなかったものの、測定による推定は大幅に異なるものであり、よって著しく不正確な結果をもたらすであろうという点で、チャンネルを高頻度で推定するという試みは失敗していることがわかる。
【0007】
【特許文献1】米国特許出願公開US2005/0018539A1号。
【非特許文献1】クラホルドほか,「移動ミニロボットの連続的なソナー検知」,ロボティクスと情報に関するIEEE国際会議(ICRA0”)講演論文集,323−328ページ,2002年(Klahold et al., "Continuous Sonar Sensing for Mobile Mini-robots", Proceedings of the IEEE International Conference on Robotics and Information (ICRA0"), pp. 323-238, 2002)。
【非特許文献2】ティー.ハスティ,アール.ティブシラニ,ジェイ.フリードマン,「統計的学習の初歩」,シュプリンガー統計学シリーズ,シュプリンガー・フェアラーク(T. Hastie, R. Tibshirani and J. Friedman, "Elements of statistical learning", the Springer Series in Statistics, 1001, Springer Verlag)。
【発明の開示】
【発明が解決しようとする課題】
【0008】
上述の例は、チャンネル推定におけるジレンマを浮き彫りにするものである。チャンネルを正確に推定する(よって、例えば強い反射体の位置を発見する)ためには、「送信−受信−待機(send-receive-wait)」による方法を使用する必要がある。言いかえれば、送信信号を送り、戻り信号を受信し、そしてすべてのエコーが消滅するのを待ってから送信を繰り返すことが必要である。これにより、先のインパルスによる残存エコーから生じる構造的ノイズによって推定が損なわれることが回避される。しかしながら、これは、達成可能な時間的分解能を大幅に制限し、よって、多くのスキーム(海底マッピング装置、又は指の位置決め装置/コンピュータと人間とのインターフェース等)の時間的な追跡能力を大きく制限する。
【0009】
必要とされているのは、チャンネルのインパルス応答の正確な推定値を連続的(continuously)に、又は継続的かつ頻繁(continually and frequently)に取得する方法、又はそれに代わって、インパルス応答をモニタリングするか又は追跡する方法である。
【0010】
チャンネルの連続的な推定は、以前に、非特許文献1において提案されている。しかしながら、これらの方法は、いわゆる相互相関技術に基づくものである。その結果、これらには多大な欠点がある。特に、このような方法は、チャンネルのインパルス応答の推定値を継続的に更新するために送信信号及び受信信号のスライディングウィンドウとともに使用可能であるが、これらの技術の最適性能は、十分に長いウィンドウの使用に大きく依存するとともに、入力信号の完全な区分的直交性に依存することがわかる。言いかえれば、送信信号の各サンプルは他のサンプルのすべてに対して直交していなければならない。このことは、入力されるサンプル符号の各要素が1ウィンドウ分の長さだけ離れたその同じ符号の対応する要素と必ず直交するように、スライディングウィンドウ内において信号が単に増分的にシフトされるとみなされる場合には特に、達成が非常に困難である。相互相関に依存するスキームは、直交性要件を可能な限り十分に満足する系列(シーケンス)を発見するという上記のニーズによって左右される。このような符号におけるいくつかの試みの例は、カオス符号化、ゴールド系列、及びゴラン符号によって与えられる。しかしながら、これらのうちの何れも、満足のいく結果を出していない。
【0011】
本発明の目的は、チャンネルのインパルス応答の推定、特にその変化の推定を向上させることにある。
【課題を解決するための手段】
【0012】
本発明は、第1の態様を参照すると、チャンネルのインパルス応答の推定方法を提供し、上記方法は、インパルス信号を上記チャンネルへ送信することと、上記チャンネルから受信信号を検出することと、インパルス信号の計算された逆行列を受信信号へ適用して上記チャンネルのインパルス応答の推定値を計算することとを含む。
【0013】
本発明はさらに、チャンネル応答を推定する装置も包含し、本装置は、送信手段と受信手段と処理手段とを備え、上記処理手段は、上記送信手段により送信されたインパルス信号の計算された逆行列を、上記受信手段により受信された信号へ適用するように構成される。
【0014】
また本発明はさらに、送信信号を表す行列の計算された逆行列を、受信された応答信号の複数のサンプルへ適用する手段を備える、チャンネルのインパルス応答を推定するためのコンピュータソフトウェア製品と、このようなソフトウェアを有するキャリアとを包含する。
【発明の効果】
【0015】
従って、本発明によれば、送信されたインパルス信号の計算された逆行列が受信信号に適用される。これにより、連続して直交する符号を必要とすることなく、かつ粗雑な送信−受信−待機技術に頼る必要なしに、高い信頼性でのチャンネルの推定がもたらされることがわかる。さらに、逆行列は送信信号に基づくものであり、送信信号、延いては計算される逆行列は予め決定可能であるので、仮にその計算的要件が高いとしても、リアルタイムで計算される必要はない。
【発明を実施するための最良の形態】
【0016】
本明細書において使用される「計算された逆行列」という用語は、出力信号を表す行列、又は出力信号の特性を表す行列から、適切な逆行列演算技術を用いて計算される、一般化された逆行列を意味するものとして理解されるべきである。当業者には、これは信号自体の逆演算とは大きく異なるということが明らかであろう。
【0017】
このような行列を計算する適切な方法として可能なものは多数存在し、これらの方法は、相応に異なる計算された逆行列をもたらす。逆行列を計算する適切な方法として可能なものには、リッジ(ridge)回帰、部分最小二乗(partial least squares:PLS)の共役勾配(conjugate gradient:CG)に基づく方法、最大エントロピー(maximum entropy:MAXENT)原理に基づくもの等の情報理論的方法、Lpノルム等の他のノルム及び基準に基づく回帰、最尤回帰、及び変数の部分集合の選択(variable subset selection)に基づく回帰が含まれる。さらに、判別分析、最適スコアリング、(一般化された)正準相関分析、局所回帰法、関数解析回帰(functional analysis regression)、及び核関数法(kernel method)等、異なる性質の信号パラメータを異なるクラスに分離する目的で回帰モデルを使用して分類又はクラスタリングのような特性をエミュレートすることは、本発明の範囲内にあることが企図される。これらの方法に関するさらなる詳細は、非特許文献2に記述されている。
【0018】
しかしながら、好適な実施形態では、上記計算された逆行列は、擬似逆行列又はムーア・ペンローズの逆行列である。当該技術において知られているように、これは、関連付けられた線形方程式の一意的な最小ノルム最小二乗解である。
【0019】
本発明は、単一のインパルス信号バーストとともに使用されてもよい。しかしながら、好適には、インパルス信号は持続的なものであり、すなわち、インパルス信号は、連続的に、一定の間隔で、突発的に、又は別の継続的なモードで送信されることが可能である。このことは、当然ながら、送信−受信−待機パラダイムの制限なしに、チャンネルのインパルス応答の経時的変動のモニタリングを可能にし、ここにおいて、本発明が最大の恩恵をもたらすポイントが存在する。
【0020】
本発明は、任意の種類のインパルスに対する任意のチャンネルのインパルス応答を推定するために使用されてもよい。特に、インパルスは、例えばマイクロ波、可視光、紫外光又は赤外光、無線信号波、X線等のような、スペクトルの任意部分からの電磁波を含むことができる。現時点では、本願出願人は、本明細書の冒頭で言及したアプリケーションにおいて使用可能なもの等の音響インパルスに対する応答の推定において特定の恩恵を見出している。従って、好適な実施形態の中には、送信されるインパルスが音響インパルスを含むものがある。この実施形態の集合の中では、使用される周波数帯はアプリケーションに依存する。例えば、企図される1つの重要なアプリケーションは、(例えば、コンピュータと人間とのインターフェースの場合において)1メートル未満の程度の距離を介して空中のオブジェクトを追跡することである。このアプリケーション及び類似のアプリケーションの場合は、超音波信号が適切である。従って、本発明のある好適な実施形態の集合においては、インパルスは超音波であり、好適には、信号の帯域幅の中心は20kHzより高く、より好適には30kHzより高く、最も好適には30kHzから50kHzまでの範囲である。
【0021】
企図される別のアプリケーションは、地震探査にある。この場合、インパルスは、下限では数ヘルツの程度にまで広がる可能性がある広い帯域幅を有するであろう。
【0022】
次に、好適な擬似逆行列の例を用いて、計算された逆行列が有する、測定対象であるチャンネルに対する優れた近似をもたらす能力を実証する。
【0023】
まず、チャンネル上への信号の送信は、以下のモデルに従うことが仮定されてもよい。
【0024】
y(t)=h(t)*x(t)+n(t) 式(1)
【0025】
ここで、
x(t)は、送信信号であり、
y(t)は、受信信号であり、
h(t)は、チャンネルのインパルス応答であり、
n(t)は、環境ノイズ項であり、
*は、畳み込み演算子である。
【0026】
送信信号は、時系列として、換言すれば、一定の時間間隔での一連の離散信号値として表される。受信信号は、サンプリングされた信号であるので、やはり時系列として表される。インパルス応答h(t)は、測定されることが求められているものである。チャンネルh(t)は、少なくとも使用される任意の実際の時間ウィンドウ内では、一定であるか、あるいは、x(t)及びy(t)の変化に比べて非常にゆっくりと変化すると仮定される。これは、まさしく本発明の目的である時間的に変動するチャンネルの測定は不可能である、ということではなく、単に、チャンネル変動は信号の変動に比べてゆっくりである必要があるということを示す。
【0027】
チャンネルは、Qタップの有限インパルス応答(FIR)フィルタとして表されることが可能である。当該技術において公知であるように、このことは、チャンネルh(t)が、入力信号の先行するQ個の時間サンプルに適用される一連の重みとしてみなされる構造である。従って、式(1)は、次のように書きかえることができる。
【0028】
【数1】
【0029】
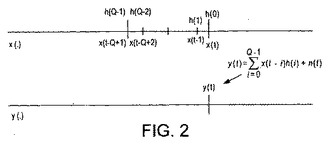
上記モデルは、次のように解釈される。与えられた時間tにおいて、最後のQ個の時間サンプルであるx(t−Q+1),…,x(t)は、h(0),…,h(Q−1)で与えられる重みに従って線形結合されて、現在の入力信号y(t)が与えられる。図2は、上記モデルを示したものである。計算の簡単化のために差し当たり、環境ノイズがない、すなわち、すべてのtについてn(t)=0であると仮定する。ノイズの問題については、後にさらに詳述する。
【0030】
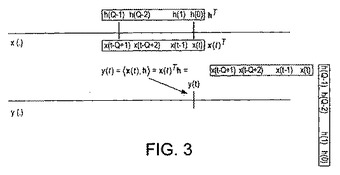
この過程は、ベクトル空間/内積の観点から捉えることもできる。図3に示すように、過程x(t)の最新のQ−1個の実現値の「スナップショット」はベクトルx(t)として構成され、このベクトルx(t)と、フィルタ係数h(0),…,h(Q−1)を含むベクトルhとの内積が、結果y(t)として取り出される。
【0031】
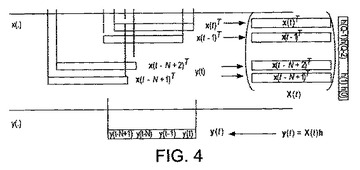
必要とされるものは、ベクトルhの推定である。このベクトルは、入力信号の単一の観察値y(t)と1つのベクトルx(t)とからだけでは、確定的に推定することができない。hに関して曖昧でない情報のために十分な情報を得るのに必要なものは、x(t)過程からの一連の「スナップショットベクトル」x(t),x(t−1),…と、y(t)過程の1つのスナップショットベクトルy(t)=[y(t−N+1),…,y(t)]とである。すると、応答スナップショットベクトルy(t)は、図4に示すように、hと「スナップショットベクトル」x(t),x(t−1),…の各々との内積によって書きかえることができる。
【0032】
行列のセットアップの最終バージョンは、X(t)の要素を次式のように書けることに注意することからわかる。
【0033】
X(t)ij=x(t−i−j) 0≦j≦Q−1,0≦i≦N−1 式(3)
【0034】
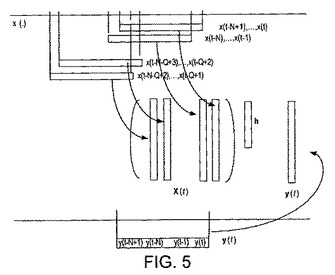
これで、X(t)の第1列が、上から下へ時間的に逆行するように、x(t−Q+1)からx(t−Q−N+2)までのx(t)の時間スライスを含むことがわかる。X(t)の第2列は、x(t−Q+2)からx(t−Q−N+3)までのx(t)の時間スライスを含み、以下同様に、最後の列は、x(t−N+1)から時間的に逆行するx(t)の時間スライスを含む。要約すると、行列X(t)の列は、図5に示すように、x(t)の連続的な時間スライスを含んでいる。
【0035】
これで、出力信号ベクトルy(t)が、x(t)の最新のQ個の時間スナップショットベクトルによる線形結合であることがわかる。これが、上記モデルの元の提示に対応するベクトル化されたバージョンである。
【0036】
行列X(t)が十分に条件付けられたものである限り、インパルス応答hは、
推定値
【数2】
を次式のような適切な基準に従って選ぶことにより、いくつもの異なる方法で推定することができる。
【0037】
【数3】
【0038】
ここで、αは、予測変数におけるノイズ及び/又は共線性(co-linearity)の存在下で解の候補を縮小させるために使用される正則化パラメータである。
【0039】
上の式4及び5の解は、公知である次式の通常最小二乗(ordinary least-squares:OLS)推定値及びリッジ又は最小平均二乗(LMS)推定値である。
【0040】
【数4】
【0041】
ここで、「+」演算子はムーア・ペンローズの逆行列を示す。これは当該技術において既知であり、極く簡単に言えば、これは、線形方程式の集合の解に対する、最小二乗アプローチを用いた最良の近似である。解が複数存在する場合は、L2ノルムが最小になるものが選ばれる。
【0042】
ノイズレベルが既知であれば、パラメータαは、統計的平均二乗誤差を最小化するように選定可能である。この技術は、信号処理の技術分野ではLMS法として知られている。ただしこのような場合、通常は、行列X(t)は単一の駆動信号又は圧縮パルスから受信されるサンプルのすべてを包含することが想定される。しかしながら、本発明によれば、駆動信号の部分集合のみを含む行列X(t)を使用することが提案される。このことは、最初の送信より前に信号が消滅するのを待機する必要なしに、hの推定値が経時的に更新されることを可能にする。これにより、スライディングサンプルウィンドウが効果的にもたらされる。
【0043】
LMS法による上述のスライディングウィンドウの定式化は、本質的には、単一のパルス又は重複を避けるように離隔された複数のパルスのみを使用するものとは対照的な、連続なLMS法である。これは、離散サンプルではなく信号の時間連続(すなわち、アナログ)表現を有していることを単に示している、時間連続なLMS法と混同されるべきではない。
【0044】
これまでに述べた分析から、送信信号の計算された逆行列、例えば擬似逆行列を受信信号へ適用すると、送信信号の全体にわたる相互の直交性を必要とすることなく、音響チャンネルの優れた推定が得られることがわかる。事実、性能を決定する重要なファクタは、送信信号の個々の部分が互いに線形独立になっている度合いである。これは、相互に直交していることよりも、条件の厳しさに関してははるかにゆるいものである。線形独立であることの重要性は式(5)から生じるが、ここでは、信号の複数の部分を可能な限り線形独立にすることでチャンネル推定の曖昧さが最小化される。このような曖昧さは行列X(t)の条件付けの品質を低下させ、結果的に、先の式(4)に対してより多くの可能な解をもたらしてしまう。さらに、X(t)の複数の列における共線性はX(t)がいくつかの小さな特異値を有することを含意するので、hの推定の分散は増大し、延いてはこれが、例えば擬似逆行列の演算の際に、付加的ノイズ成分を拡大させるように影響する。
【0045】
後に示すように、本発明の逆行列演算技術は、先に述べた構造的ノイズの問題から被る悪影響がはるかに少ない。その理由は、この構造的ノイズが受信信号の一部を形成していて、計算された逆行列がこれに適用されるということにある。これには、構造的ノイズをランダム化又は白色化し、よって平均化を容易にするという効果のあることがわかる。
【0046】
擬似逆行列等の逆行列の計算が計算集約的なタスクである点は、重要な考慮事項である。必要な逆行列は、受信信号へ当該逆行列を適用するのと同時に、又はその直前に計算可能である。簡単なアプリケーションでは、インパルス信号の送信時にこれをリアルタイムで行うことも可能である。しかしながら、これでは、達成可能な分解能(時間及び空間の双方)が制限される。これに対処するため、チャンネル推定は事後の遡及的分析として実行されてもよい。しかしながら、これは、多くのアプリケーションにとって不適切であろう。
【0047】
しかしながら、好適には、逆行列はインパルス信号の送信に先立って計算される。本願出願人は、これを行う能力が本発明に係る好適な方法の重要な優位点であると認識している。このことは、分解能の大幅な制限又は高価な処理パワーの要件なしにリアルタイム実装を可能にする。計算された逆行列、例えばX(t)+は、予め決められた信号x(t)から事前に計算されてメモリに格納され、次いでy(t)におけるサンプルのスナップショットベクトルと事前に乗算するためのルックアップ表として使用されることが可能である。リアルタイムの逆行列演算は、不要である。この利点の意義は、これを、特許文献1に記載されている最近の従来技術による教示と比較すればより良く理解することができる。特許文献1では、応答信号y(t)の時間サンプルから構成される行列の逆行列を演算することが必要であるようにモデルが構築され、この場合、測定後の逆行列演算が不可避である。従って、特許文献1における教示内容では、分散されたネットワーク上の多数のコンピュータ間で必要な処理を分割する方法に重点が置かれている。これに対して、本発明の一実施形態は、後述するように、標準的なデスクトップ型パーソナルコンピュータ上への実装に成功している。
【0048】
受信信号は、通常、環境におけるオブジェクトの表面からの反射と、信号が伝搬する媒体(例えば、音響信号の場合は空気)の影響との結果である。しかしながらまた、受信信号は、環境の一部を反射せずに通過している可能性もある。このことは、例えば、送信機(もしくは送信機が取り付けられたオブジェクト)を空間中で位置決めするための簡単なシステムの場合にあてはまる可能性がある。
【0049】
送信信号、延いては受信される応答は、使用されるハードウェアの制約内のブロードバンド信号である可能性がある。しかしながら、少なくともいくつかの好適な実施形態では、これらの帯域幅は意図的に制限される。制限なしであればブロードバンドである信号の帯域幅を制限することは、信号に冗長性を導入することに相当するので、これは、チャンネル推定の計算に要する計算量を削減する点で効果的である。
【0050】
一例を挙げると、帯域幅は、そのもとの範囲の3分の1まで制限されてもよい。行列演算に含まれる全内積との密接な相関を達成するには、本来必要とされたであろう内積における乗算回数の約3分の1で足りるので、完全なベクトルから抽出されるベクトル要素がエイリアシング効果を生じないように選定されていれば、送信されるインパルスx(t)及び受信される信号y(t)における後続の時間サンプルは所定の程度の冗長性を呈示する。
【0051】
さらに、送信信号x(t)及び受信信号y(t)の帯域が制限される場合は、チャンネル推定値
【数5】
も同じく制限される。従って、いくつかのアプリケーションでは、
【数6】
における削減された個数のタップを推定すれば(この場合もやはり、
【数7】
におけるフィルタタップがエイリアシングを回避するように選定されているとして)、他のタップを十分な予測品質で十分に予測することができる。この場合もやはり、必要な計算量は削減され、よって、可能なアプリケーションは広がり、かつ/又は、分析を実行し得る速度は高まり、これにより、より高い時間分解能の達成が可能になる。規則正しい間隔で行われる選択は単にサンプリングレートを削減することに等価になるので、サンプルの選定はランダムであること、又は擬似ランダムシーケンスに従うことが好ましい。
【0052】
ある好適な実施形態の集合では、チャンネル推定は、環境のあらゆる特徴をモニタリングするために使用される。例えば、これは、石油探査にとって大きな価値をもつ海底面を測定するために使用可能である。この場合の「チャンネル」は、海底と、介在する海水である。本発明に従って達成され得る優位点は、十分な分解能を保ちながら、従来技術を使用する場合よりはるかに迅速に海底を走査できることにある。これは、送信した信号が消滅するのを待つ必要がなくかつ可能な限り高度に相互に直交する複数の送信符号を構築する必要なしにチャンネル推定の連続的な更新をもたらす、本発明により与えられる能力の成果である。このような実施形態の他の例としては、医療法画像化処理、セキュリティのスキャン処理、ロボットビジョン等がある。
【0053】
さらなる態様から見ると、本発明は、環境をマッピングする方法を提供し、本方法は、インパルス信号を上記環境へ送信することと、上記環境からの戻り信号を検出することと、上記インパルス信号の計算された逆行列を上記戻り信号へ適用することとを含む。
【0054】
また、インパルス信号を環境へ送信する手段と、上記環境からの戻り信号を検出しかつ上記インパルス信号の計算された逆行列を上記戻り信号へ適用する手段とを備える、環境をマッピングするためのマッピング装置も提供される。
【0055】
本発明はまた、環境へ送信されるインパルス信号の計算された逆行列を上記環境からの戻り信号へ適用する手段と、これにより上記環境の表現を計算する手段とを備える、環境をマッピングするためのコンピュータソフトウェア製品を包含する。
【0056】
好適には、上記マッピング方法は、推定されたチャンネル応答に基づいて位置ダイアグラムを構築することを含む。これは、連続したインパルス応答推定値が互いに隣接して提示された表現である。このようなダイアグラム内の特徴部分、例えば反射体の端又は中心は、次に、標準的な画像処理技術を用いて識別可能である。例えば、海底等の地形上において定速で送信機を移動させることによって、海底のプロファイルがスキャンされる。
【0057】
別の好適な実施形態の集合では、チャンネル推定は、移動するオブジェクトの追跡に使用される。この場合の「チャンネル」は、オブジェクト及び周囲の空間である。ここでは、チャンネル推定を連続的に更新する能力が不可欠である。このようなアプリケーションは、オブジェクトが非常にゆっくりと移動しているか、非常に低い空間分解能で十分であるというのではない限り、従来技術の送信−受信−待機技術では当然ながら不可能である。以下の例でわかるように、本発明の一実施形態によれば、標準的なデスクトップPCと、一般的なPCラウドスピーカと、2つの一般的なマイクロホンとを用いて、指先の高速移動をミリメートル未満の精度で追跡し得ることが示されている。これは、物理的接触の必要性を取り除いた人間とマシンとのインターフェースにおいて、多くの可能なアプリケーションを有する。本願出願人が企図するこのようなアプリケーションのうちの特定の1つは、特に病院における、医療機器のためのインターフェースにおけるものであり、病院では、物理的接触の必要性の回避によって、機器を介した相互感染の危険性が低下する。
【0058】
さらに他の態様から見ると、本発明はオブジェクトを追跡する方法を提供し、本方法は、インパルス信号を送信することと、上記オブジェクトからの上記インパルス信号の反射を記録することと、上記インパルス信号の計算された逆行列を上記反射された信号へ適用することとを含む。
【0059】
好適には、上記方法はさらに、推定されたチャンネル応答に基づいて位置ダイアグラムを構築することと、例えば追跡されているオブジェクトの位置を計算するために適切な画像処理技術を用いて、上記位置ダイアグラムを解釈することとを含む。
【0060】
また、送信手段と、受信手段と、処理手段とを備える追跡装置も提供され、上記処理手段は、上記送信手段によって送信されたインパルス信号の計算された逆行列を、上記受信手段によって受信された信号へ適用するように構成される。
【0061】
本発明はまた、オブジェクトへ向けて環境内へ送信されるインパルス信号の計算された逆行列を、上記オブジェクトから反射される戻り信号へ適用する手段と、これにより、上記オブジェクトのロケーションを計算する手段とを備える、オブジェクトを追跡するためのコンピュータソフトウェア製品を包含する。
【0062】
一般に、組み合わされた一対の送信機及び受信機毎に、1次元での追跡が可能になる。従って、2次元の追跡を行う場合は、2つの受信機、又は好適には2つの送信機が必要である。これらの2つの場合において、共通の送信機又は受信機がそれぞれ使用可能である。しかしながら、このことは必須ではなく、代わりに別々のものが使用されてもよい。2つの送信機は、独立した信号によって駆動されてもよい。あるいは、これらは同じ信号によって駆動されてもよいが、ただし、このとき各信号には互いに時間遅延が付加されている。このことは、信号が互いに区別されることを可能にする。これと同じ効果は、送信機のうちの1つを追跡領域から物理的にオフセットすることによっても達成可能である。
【0063】
いくつかの企図される実施形態では、2つの送信機、例えばラウドスピーカは、同じ周波数帯からの信号のそれぞれによって駆動され、これらの信号は受信機において分離される。これは、以下の説明から理解することができる。
【0064】
受信機(例えば、マイクロホン)で受信される信号は、送信された(そして畳み込まれた)信号の合成信号である。
【0065】
y(t)=h1(t)*x1(t)+h2(t)*x2(t) 式(6a)
【0066】
これは、行列/ベクトル表記では次式になる。
【0067】
【数8】
【0068】
ここで、以下の表記を用いた。
【0069】
X(t)=[X1(t)X2(t)]
h(t)=[h1(t)Th2(t)T]T
【0070】
本発明に係る方法を使用すれば、誤差及び摂動に関して結果が安定であるように行列X(t)の大きさが選定されることを保証しながら、インパルス応答h1(t)及びh2(t)の双方を含むベクトルh(t)を推定することができる。
【0071】
当然ながら、3次元追跡では、余分な送信機又は受信機を追加することができる。本発明の方法は、理想的には、前述の分析から理解できるように、複数の送信機及び受信機とともに使用されることに適する。例えば、これらの複数の構成要素は、アレイ処理や、アレイ画像生成及び分析を実行するために使用されてもよい。実際に、本発明の方法は、本発明の方法を使用できるアプリケーションと音声及び画像生成技術との分野において大きな効力を有する。これは、実際の演算より前に信号行列の逆行列を演算することによりもたらされる、計算集約的な演算を実行する能力に由来する。
【0072】
オブジェクトを2次元又は3次元で位置決めするためには、異なる信号が適切に合成されなければならない。好適には、異なる信号に対応するインパルス応答推定を合成して、追跡されているオブジェクトを位置決めするためには、楕円の交差が使用される。言いかえれば、インパルス応答のピークを強い反射体によるものであると解釈することにより、反射体は、受信機/送信機を焦点として有し、送信機から反射体へ到達して戻る伝搬時間により与えられる径を有する楕円面上に存在するものとみなされる。複数の送信機/受信機が使用されれば、反射体は受信機−送信機の伝搬時間の3つ組に対応する楕円面の交点に存在し、これらの楕円面の共通の交点として識別されることが可能である。
【0073】
本発明に係る上述のマッピング及び追跡の用途は、共通する重要な特徴を有する。すなわち、受信機は送信機が生成するインパルスに対するチャンネルの応答のみを受信して分析するという意味で、これらは閉じたものである。実際に、本発明の場合は一般にはこのことは事実であり、送信機と受信機との間で情報は伝達されない。本発明は、送信される内容を、それが計算された逆行列に変形されているにしても、受信機が正確に認識しているということに基づくものである。「情報」は逆行列の計算に必要とされるので、論理的には情報は伝達可能ではない。
【0074】
好適には、送信される信号と受信される応答とに使用されるサンプリングレートは同じである。しかしながら、これは必須ではなく、異なる場合もある。サンプリングレートとしては、アプリケーション及び要求される分解能に依存して、数ヘルツからギガヘルツまでの何れかの値が使用可能である。
【0075】
本願出願人は、本発明に従って説明している連続なLMS法が、残存エコー及びノイズに対して頑健であるゆえに効果的であることを認識している。以下、このことを説明する。式(1)に残存エコー及びノイズの双方を包含させると、次式になる。
【0076】
【数9】
【0077】
ここで、n(t)はチャンネルノイズであり、s(t)は残存エコーからの寄与分である。このエコーは、明らかに、信号x(t)のうちの何らかの先行部分がフィルタリングされたものになる。言いかえれば、s(t)への寄与分は、前述の分析で検討したベクトル[x(t−Q+1),…,x(t)]に含まれるものよりも先行するx(t)のサンプルから生じるもののはずである。これらの先行するサンプルは、ベクトルh内に保持されるタップの外部にある障害又は影響に対応する別のフィルタタップと畳み込み演算される。これらの別のタップは、フィルタg(t)によって、次式のように表される。
【0078】
【数10】
【0079】
ここで、Mは最大残響時間(又はエコーの残存時間)である。行列表記に移行すると、式(7)及び(8)は、ブロック形式では次式のように表される。
【0080】
y(t)=X(t)h+X2(t)g+n(t) 式(9)
【0081】
ここで、X2(t)は、中心のQタップウィンドウの外側にある、上述の行列形式による信号の一部を含み、gは、「ウィンドウの外」のフィルタタップによるベクトルであり、n(t)は、付加的チャンネルノイズを含むベクトルである。
【0082】
本発明に係る逆行列演算技術を使用し、上述の式(9)に擬似逆行列X(t)+を左から乗算すると、次式が得られる。
【0083】
【数11】
【0084】
ここで、以下の表記を用いた。
【0085】
m(t)=X(t)+X2(t)g+X(t)+n(t)
【0086】
2行目の右辺の第1項に関して、X(t)+X(t)=Iであれば、
【数12】
であり、そうでなければ、これは、(ムーア・ペンローズの逆行列の定義により)hの最小二乗最小ノルム推定値になる。この行の第2項は、残存エコーに関連している。一般に、残存エコーX2(t)gは、冒頭で問題点について説明した「構造的」なノイズの形式になるが、X(t)+X2(t)gはこの構造をもたない。これは、X(t)及びX2(t)に含まれるx(t)の複数の信号が従属したものでなく、残存エコーX2(t)gにX(t)+を予め乗算することには残存エコーの時間的構造を歪める効果があるということに起因する。さらにこのことは、異なるスライディング行列の対X(t)及びX2(t)でも異なってくる。ゆえに、残存エコーは、経時的に蓄積される、やっかいな反復的ファクタにはならず、むしろ、成分n(t)に類似した一般的なノイズ成分のように作用する。言いかえると、残存エコーは一般的なノイズ源であるが、構造的であるか否かに関わらず、このノイズに、時間的に変化するランダム要素に基づく行列、すなわち逆行列X(t)+を予め乗算することにより、いかなる時間的な反復構造もノイズ源から除去される。その結果、真のhと同一であるかこれに近い値を有する可能性のある推定値
【数13】
が観察されて、時間的に変化する誤差項m(t)へ加算されるとき、
【数14】
を一定期間にわたって平均化することにより、このようなノイズ項の影響を最小化することができる。式(5)におけるように、リッジ回帰が使用される場合にも、同じことが言える。
【0087】
本発明を使用する方法及び装置は、相互相関を使用するものよりも効果的であることを先に述べた。以下、これについて説明するが、まずは、本明細書で言及した相互相関の動作方法について説明する。
【0088】
信号x(t)がラウドスピーカを介して送信されたと仮定すると、これは、マイクロホンを介して同じくy(t)として受信される。受信信号y(t)は、送信信号に対して、次式のように関連しているものと考えられる。
【0089】
【数15】
【0090】
すなわち、y(t)のあるサンプルは、x(t)における最後のK個のサンプルの線形結合であり、線形重みは「フィルタ係数」h(0),…,h(K−1)において与えられる。チャンネルを推定するためには、これらのフィルタ係数を推定することが必要である。この技術において、信号x(t)は、負の無限大から正の無限大までのすべてのtについて「白色」であると仮定される。言いかえれば、信号はすべての非ゼロシフトについて当該信号自体と無相関であると仮定されている。このことは次式のように表される。
【0091】
【数16】
【0092】
ここで、Pは正の実数である。
【0093】
信号と、その信号自体の時間反転したものとの畳み込み演算を行うことは、その信号自体との相関、すなわち信号の自動相関を計算することと同じである。よって、x(t)が実際に白色であることを仮定すれば、x(t)をそれ自体と相関させることにより、時間ラグ0の場合は正の値Pが生じ、その他のすべての場合ではゼロが生じる。これを別の方法で表記すると、次式になる。
【0094】
x(t)*x(−t)=P・∂(t) 式(C)
【0095】
ここで、∂(t)はディラックのデルタ関数である。
【0096】
ここで、次式のように、N+1個のサンプル長及びx(t)の時間ウィンドウで、時間軸上の点t0のほぼ周辺においても式(B)が成り立つと仮定する。
【0097】
【数17】
【0098】
t0の周囲でy(t)とx(−t)との畳み込みを行うと、次式が得られる。
【0099】
【数18】
【0100】
この和における内項を計算すると、次式が得られる。
【0101】
【数19】
【0102】
よって、次式が得られる。
【0103】
【数20】
【0104】
上記式(D)からわかるように、式(G)における括弧内の項は、l=iのとき、かつそのときに限り(およそ)Pであり、そうでなければ(およそ)0である。ゆえに、l=1を選ぶことにより、畳み込み
【数21】
は、P×h(1)になり、l=2であれば、P×h(2)、等となる。このようにして、フィルタ係数h(.)は、x(t)のウィンドウと、所定の「中心」の時間サンプルt0の周囲のl(t)のウィンドウとの畳み込みを行うことにより推定可能である。しかしながら、式(D)における近似は近似でしかない。実際には、局所的に連続して白色であるという特性を有するシーケンスx(t)を発見することは非常に困難であり、上述の式におけるN及びKの多くの望ましい選択の場合、これは不可能である。これにより、全体的な推定品質の性能は制限される。
【0105】
上述の相互相関法は、式(5及び6)において本発明の説明のために用いたものと同様の枠組みに当てはめることが可能である。この場合、推定量は、次式になるであろう。
【0106】
【数22】
【0107】
これは、低品質の推定量である。X(t)が直交行列である場合、解は、LS又はLMS又はリッジ推定量(スケーリング定数まで)と同一になる。しかしながら、一般には、関連したスライディングウィンドウ行列X(t)が一般に直交行列であるという特性を有する時系列x(t)を構築することは困難である。これは、直交符号の形式をとる比較的長さの短いシーケンスを発見するという問題点に起因する。その結果、相互相関に基づく方法では符号シーケンスの選択が不可欠であるが、連続なLMS法ではさほど重要ではない。
【0108】
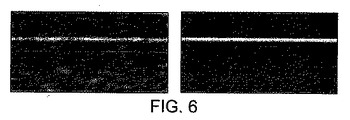
図6は、インパルス応答推定のシーケンスの例を示したものである。本例は、インパルス応答は変化しない人為的に作った場合の事例であるが、これは相対的な分解能の明確性を示そうとするためのものである。画像の縦のスライスは、連続した時点におけるインパルス応答推定値に対応し、すなわち、画像は先に述べた位置ダイアグラムである。左側のパネルには、相互相関法を用いて得られた結果が示され、右側のパネルでは、本発明に係る連続なLMS法が使用されている。相互相関の画像では望ましくないアーティファクトの存在が明らかであり、LMSに比べて、その後の追跡タスクはより困難になる。
【0109】
少なくともいくつかの好適な実施形態において述べたように、帯域幅は、使用されるハードウェアの制約を超えて意図的に制限される。これは、次に説明するように、必要な計算量の低減において優位点を有する。
【0110】
信号の帯域が制限される場合、信号x(t)には時間的な冗長度が存在し、よって、行列X(t)の行及び列も冗長性を帯びる。この影響で、行列X(t)の階数は下がる。これにより、真のインパルス応答hの推定精度は低下させられるが、計算量もずっと削減することができる。
【0111】
ここで、次式を、X(t)の節約された特異値分解であるとする。
【0112】
【数23】
【0113】
ここで、{σi}は非ゼロの特異値であり、{ui,vi}は左側及び右側の特異ベクトルである。行列U=(u1,u2,…,ur),V=(v1,v2,…,vr),及びS=diag(σ1,σ2,…,σr)は、個数r=rank(X(t))の左右の特異ベクトル及び特異値をそれぞれ含む。X(t)が高度に共線的であれば、特異値の多くはゼロに近くなる。このことは、以下の近似を可能にする。
【0114】
【数24】
【0115】
これは、X(t)のk成分近似である。行列Uk,Sk,Vkは、この行列の最初のk個の特異ベクトル及び特異値のみを含む。さらに、これで、X(t)の擬似逆行列推定を、次式で表すことができる。
【0116】
【数25】
【0117】
この時点で、行列Uk,Sk,Vkは削減された個数の列及び行を有するので、T及びPは、次式により表される。
【0118】
T=VkSk−1
P=UkT
【0119】
X(t)が(N×Q)行列であれば、X(t)+は(Q×N)になり、ゆえに、TはQ×Kになり、Pは(N×K)になる。チャンネルhを推定するためにX(t)の擬似逆行列を適用すると、次式になる。
【0120】
【数26】
【0121】
ここで、積Py(t)の計算にはN×K回の演算(乗算及び和演算)が必要であり、結果Py(t)とTとの積の計算にはQ×K回の演算が必要である。このことは、総演算回数が(N+Q)×Kであることを意味する。元の方法の代替方法は、直にX(t)+との乗算を行うため、N×Q回の演算が必要である。N=200,Q=70及びK=Q/3〜23が、X(t)に係るランクが削減されかつ十分に良好な推定をもたらす場合(典型的には、元の周波数帯の1/3に制限された信号を使用するとき)では、y(t)とX(t)+との乗算の総演算回数は200×70=14000になるが、これに対して、y(t)にまずPを乗算して次にTを乗算すると、合計の演算回数は(N+Q)×K=(200+70)*23=6210になる。このことは、演算時間の半分以上が節約されたことを意味する。提案している低減の実装は、各時間ウィンドウにつき、1つの(X(t)+)ではなく、2組の行列T,Pを格納することを含む。
【0122】
上記内容は、本発明のさらに好適な特徴をもたらす。本発明の方法に係る少なくともいくつかの好適な実装においては、計算された逆行列は、インパルス信号行列の特異値分解の部分集合から導出される一対の行列を含み、本方法は、これらの行列に、上記受信信号のサンプルを含むベクトルを乗算するステップを含む。好適には、本方法はさらに、上記受信信号のサンプルの部分集合を選択して部分集合ベクトルを生成することと、上記一対の行列に上記部分集合ベクトルを乗算することとを含む。
【0123】
別の好適な特徴によれば、本方法は、上記逆行列の行及び/又は列の部分集合を計算することと、上記部分集合間での補間演算を行って上記計算された逆行列を完成させることとを含む。
【0124】
次に、本発明の実装例について説明する。ただし、これは理解を助ける目的で行うものであり、本発明の範囲を限定するものとして理解されるべきではない。
【0125】
サウンドカードにより駆動される標準的なPCラウドスピーカを用いて、指先追跡システムを構築した。サウンドカードには、反射される信号を記録するために2つの標準的なPCマイクロホンも接続した。当然ながら、専用の超音波トランスデューサ又はハイドロホンを代わりに使用してもよい。
【0126】
0乃至20kHzの帯域におけるディジタル白色ノイズをディジタル信号プロセッサ(DSP)により生成し、ここで、各時間サンプルは区間[−1,1]から引き出され、上記ディジタル白色ノイズを、ディジタル−アナログ変換器を介してサウンドカードへ送り、よってラウドスピーカまで送った。マイクロホンから受信される信号は、サウンドカードを介してアナログ−ディジタル変換器(すなわち、サンプラ)へ向けて送った。約22kHzのサンプリングレートを使用した。サンプリングされた信号は、DSPへ送った。DSPはまた、送信信号の予め計算された擬似逆行列を保持するメモリ記憶装置にも接続されている。これは、次に、所定のウィンドウ内の受信される応答サンプルの行列を予め乗算するために使用される。
【0127】
典型的なパラメータは、以下の通りである。行列X(t)の大きさを200×70であるように選択し(x(t)信号の200個のスナップショットを用いて70個のフィルタタップを推定する)、インパルス応答推定の更新を毎秒100回行うと、合計で毎秒200×70×100=140万回の乗算及び加算演算、又は1.4メガフロップになる。これは、バックグラウンド演算としてソフトウェアで実装したり、又は安価なDSP上で実行したりすることが可能な、適度の演算回数である。演算回数は、整数演算になるように圧縮されてもよい。さらに、この目的のために、プロセッサの並列化と、単一命令複数データ命令(single instruction multiple data instructions)と、専用のコプロセッサを使用してもよい。
【0128】
結果としての計算されたタップは、図6の右側のパネルに示すものと同様の位置ダイアグラムにプロットされる。これは、実際上、時間(横軸)に対する送信機/受信機からの変位(縦軸)のプロットである。従って、図6におけるプロットは、静止した反射体に関するものである。位置ダイアグラムは、信号毎について、すなわちラウドスピーカ毎についてプロットされる。
【0129】
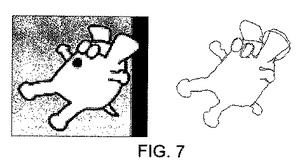
2次元トレースをプロットするためには、反射体の移動の概要をプロットできるようにするために、楕円の交差を用いて2つのダイアグラムが連続的に合成される。図7は、指の追跡に使用される画像の例と、上述の装置によって結果的に得られたプロットとを示す。反射体の非常に小さな移動も明確に解像されていることが観察されるであろう。例えば、右側のプロットは、事実上、左側の輪郭におけるいくつかの連続したトレーシングで構成されることもわかる。
【図面の簡単な説明】
【0130】
【図1a】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、所定の出力装置を介してインパルスが駆動され、結果的に生じる信号が所定の入力装置を介して受信される様子を示す図である。
【図1b】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、インパルスをより高頻度で送信したときを示す図である。
【図1c】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、出力インパルスがさらに高頻度で送信されたときを示す図である。
【図1d】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、図1(c)の波形からの単一の「インパルス応答スライス」を示す図である。
【図1e】
【図2】与えられた時間tにおいて、最後のQ個の時間サンプルであるx(t−Q+1),…,x(t)は、h(0),…,h(Q−1)で与えられる重みに従って線形結合されて、現在の入力信号y(t)が与えられるモデルを示す図である。
【図3】過程x(t)の最新のQ−1個の実現値の「スナップショット」はベクトルx(t)として構成され、このベクトルx(t)と、フィルタ係数h(0),…,h(Q−1)を含むベクトルhとの内積が、結果y(t)として取り出されることを示す図である。
【図4】hとスナップショットベクトルx(t),x(t−1),…の各々との内積を示す図である。
【図5】行列X(t)の列がx(t)の連続的な時間スライスを含んでいることを示す図である。
【図6】インパルス応答推定のシーケンスの例を示す図である。
【図7】指の追跡に使用される画像の例と、上述の装置によって結果的に得られたプロットとを示す図である。
【技術分野】
【0001】
本発明は、その環境又はその内部の1つ以上のオブジェクト(対象物)のマッピングを可能にする、インパルスに対するチャンネル応答を推定することに関し、特に音響インパルスを使用したものに関するが、それに限定するものではない。本発明は、特に、環境におけるリアルタイムの変化を測定することに関する。
【背景技術】
【0002】
環境に関する情報を得るために音響信号を使用し得ることが望ましいアプリケーションは、多種多様に存在する。例としては、人の追跡、人間とコンピュータとのインターフェース、海底マッピング、医療用超音波画像化診断、音響スキャナ、セキュリティ装置、及びロボットビジョンが含まれる。光ではなく音響信号を使用することには、例えば、光の状態に反応しないこと、人間が感知し得ない周波数で良く動作すること、向上された、又は簡単化された遠近感をもたらすことができること、といったいくつかの優位点をもつことが可能である。
【0003】
音響マッピングの基本原理は、短いバースト又はインパルスを環境内へ送信し、環境内における関心が持たれたオブジェクトからの反射を測定してそれに関する何か、通常はそのサイズ、形状又は位置を決定するというものである。これは、当該技術においては、チャンネルのインパルス応答の推定、又は単にチャンネル推定として知られている。音響モニタリングのためのチャンネル推定において遭遇する主たる障害は、望ましくないエコーによるものであり、これは事実上すべての現実的なアプリケーションにおいて発生する。チャンネル及び観察者の双方が静的であれば、これは重大な問題ではない。しかしながら、システムにおいて時間的に変換する何らかの要素が存在していれば、その変化を測定するためにインパルスを繰り返し送信する必要がある。送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合は、問題が生じる。図1a乃至図1dを参照して、この問題を説明する。
【0004】
図1aは、所定の出力装置(例えば、ラウドスピーカ又はトランスデューサ)を介してインパルスが駆動され、結果的に生じる信号が所定の入力装置(例えば、マイクロホン、センサ)を介して受信される様子を示す。インパルス応答は時系列で示され、ここで、横軸は時間軸であり、縦軸は所定の時間における応答(例えば、圧力)を示す。推定されるインパルス応答は、チャンネルに関する重要な情報をもたらすことができ、従って、周囲環境、オブジェクト(「反射体」)の位置、変形及び形状に関する重要な情報をもたらすことができる。インパルス応答の推定は、無線通信から医療用画像化処理及び地震探査までに及ぶ、広範囲の信号処理アプリケーションの基礎である。
【0005】
しかしながら、周囲環境が変化する可能性がある多数の状況が存在し、また、他の方法でもチャンネルは変化する。この変化は、モニタリング可能であることが望ましい。明らかに、最良の時間的分解能をもたらすためには、インパルス応答を可能な限り高頻度で測定する必要があるであろう。これを実行するための自明な方法は、図1(b)に示すようにインパルスをより高頻度で送信することであるようにも思われるが、これによって発生する問題がある。インパルスが先のインパルスのすぐ後で送信されると、図1(b)における主ピーク間の波状のパターンからわかるように、最初のインパルス応答からのエコーが次の推定に「影響を与える」。従って、チャンネルの推定のそれぞれは、その直前の推定によってある程度歪められる。これは、所望の信号をマスクするという点でノイズの一種ではあるが、信号強度を増大させたり、又は連続する推定値を平均化したりすることにより克服できるランダムな環境ノイズとは異なる。むしろこれは、これが信号自体から引き出されるものであって、当然ながら本来の目的であるチャンネルを完全に知ることなくしては訂正不可能であるという点で、「構造的」なノイズである。
【0006】
この問題の深刻さは、図1(c)に示すように、出力インパルスがさらに高頻度で送信される場合に増大する。図1(c)の波形からの単一の「インパルス応答スライス」(図1(d)参照)を見て、これを、ただ1つのインパルスが送信された場合である図1(a)における対応する応答に比較すると、この例では、物理的なチャンネルに変化はなかったものの、測定による推定は大幅に異なるものであり、よって著しく不正確な結果をもたらすであろうという点で、チャンネルを高頻度で推定するという試みは失敗していることがわかる。
【0007】
【特許文献1】米国特許出願公開US2005/0018539A1号。
【非特許文献1】クラホルドほか,「移動ミニロボットの連続的なソナー検知」,ロボティクスと情報に関するIEEE国際会議(ICRA0”)講演論文集,323−328ページ,2002年(Klahold et al., "Continuous Sonar Sensing for Mobile Mini-robots", Proceedings of the IEEE International Conference on Robotics and Information (ICRA0"), pp. 323-238, 2002)。
【非特許文献2】ティー.ハスティ,アール.ティブシラニ,ジェイ.フリードマン,「統計的学習の初歩」,シュプリンガー統計学シリーズ,シュプリンガー・フェアラーク(T. Hastie, R. Tibshirani and J. Friedman, "Elements of statistical learning", the Springer Series in Statistics, 1001, Springer Verlag)。
【発明の開示】
【発明が解決しようとする課題】
【0008】
上述の例は、チャンネル推定におけるジレンマを浮き彫りにするものである。チャンネルを正確に推定する(よって、例えば強い反射体の位置を発見する)ためには、「送信−受信−待機(send-receive-wait)」による方法を使用する必要がある。言いかえれば、送信信号を送り、戻り信号を受信し、そしてすべてのエコーが消滅するのを待ってから送信を繰り返すことが必要である。これにより、先のインパルスによる残存エコーから生じる構造的ノイズによって推定が損なわれることが回避される。しかしながら、これは、達成可能な時間的分解能を大幅に制限し、よって、多くのスキーム(海底マッピング装置、又は指の位置決め装置/コンピュータと人間とのインターフェース等)の時間的な追跡能力を大きく制限する。
【0009】
必要とされているのは、チャンネルのインパルス応答の正確な推定値を連続的(continuously)に、又は継続的かつ頻繁(continually and frequently)に取得する方法、又はそれに代わって、インパルス応答をモニタリングするか又は追跡する方法である。
【0010】
チャンネルの連続的な推定は、以前に、非特許文献1において提案されている。しかしながら、これらの方法は、いわゆる相互相関技術に基づくものである。その結果、これらには多大な欠点がある。特に、このような方法は、チャンネルのインパルス応答の推定値を継続的に更新するために送信信号及び受信信号のスライディングウィンドウとともに使用可能であるが、これらの技術の最適性能は、十分に長いウィンドウの使用に大きく依存するとともに、入力信号の完全な区分的直交性に依存することがわかる。言いかえれば、送信信号の各サンプルは他のサンプルのすべてに対して直交していなければならない。このことは、入力されるサンプル符号の各要素が1ウィンドウ分の長さだけ離れたその同じ符号の対応する要素と必ず直交するように、スライディングウィンドウ内において信号が単に増分的にシフトされるとみなされる場合には特に、達成が非常に困難である。相互相関に依存するスキームは、直交性要件を可能な限り十分に満足する系列(シーケンス)を発見するという上記のニーズによって左右される。このような符号におけるいくつかの試みの例は、カオス符号化、ゴールド系列、及びゴラン符号によって与えられる。しかしながら、これらのうちの何れも、満足のいく結果を出していない。
【0011】
本発明の目的は、チャンネルのインパルス応答の推定、特にその変化の推定を向上させることにある。
【課題を解決するための手段】
【0012】
本発明は、第1の態様を参照すると、チャンネルのインパルス応答の推定方法を提供し、上記方法は、インパルス信号を上記チャンネルへ送信することと、上記チャンネルから受信信号を検出することと、インパルス信号の計算された逆行列を受信信号へ適用して上記チャンネルのインパルス応答の推定値を計算することとを含む。
【0013】
本発明はさらに、チャンネル応答を推定する装置も包含し、本装置は、送信手段と受信手段と処理手段とを備え、上記処理手段は、上記送信手段により送信されたインパルス信号の計算された逆行列を、上記受信手段により受信された信号へ適用するように構成される。
【0014】
また本発明はさらに、送信信号を表す行列の計算された逆行列を、受信された応答信号の複数のサンプルへ適用する手段を備える、チャンネルのインパルス応答を推定するためのコンピュータソフトウェア製品と、このようなソフトウェアを有するキャリアとを包含する。
【発明の効果】
【0015】
従って、本発明によれば、送信されたインパルス信号の計算された逆行列が受信信号に適用される。これにより、連続して直交する符号を必要とすることなく、かつ粗雑な送信−受信−待機技術に頼る必要なしに、高い信頼性でのチャンネルの推定がもたらされることがわかる。さらに、逆行列は送信信号に基づくものであり、送信信号、延いては計算される逆行列は予め決定可能であるので、仮にその計算的要件が高いとしても、リアルタイムで計算される必要はない。
【発明を実施するための最良の形態】
【0016】
本明細書において使用される「計算された逆行列」という用語は、出力信号を表す行列、又は出力信号の特性を表す行列から、適切な逆行列演算技術を用いて計算される、一般化された逆行列を意味するものとして理解されるべきである。当業者には、これは信号自体の逆演算とは大きく異なるということが明らかであろう。
【0017】
このような行列を計算する適切な方法として可能なものは多数存在し、これらの方法は、相応に異なる計算された逆行列をもたらす。逆行列を計算する適切な方法として可能なものには、リッジ(ridge)回帰、部分最小二乗(partial least squares:PLS)の共役勾配(conjugate gradient:CG)に基づく方法、最大エントロピー(maximum entropy:MAXENT)原理に基づくもの等の情報理論的方法、Lpノルム等の他のノルム及び基準に基づく回帰、最尤回帰、及び変数の部分集合の選択(variable subset selection)に基づく回帰が含まれる。さらに、判別分析、最適スコアリング、(一般化された)正準相関分析、局所回帰法、関数解析回帰(functional analysis regression)、及び核関数法(kernel method)等、異なる性質の信号パラメータを異なるクラスに分離する目的で回帰モデルを使用して分類又はクラスタリングのような特性をエミュレートすることは、本発明の範囲内にあることが企図される。これらの方法に関するさらなる詳細は、非特許文献2に記述されている。
【0018】
しかしながら、好適な実施形態では、上記計算された逆行列は、擬似逆行列又はムーア・ペンローズの逆行列である。当該技術において知られているように、これは、関連付けられた線形方程式の一意的な最小ノルム最小二乗解である。
【0019】
本発明は、単一のインパルス信号バーストとともに使用されてもよい。しかしながら、好適には、インパルス信号は持続的なものであり、すなわち、インパルス信号は、連続的に、一定の間隔で、突発的に、又は別の継続的なモードで送信されることが可能である。このことは、当然ながら、送信−受信−待機パラダイムの制限なしに、チャンネルのインパルス応答の経時的変動のモニタリングを可能にし、ここにおいて、本発明が最大の恩恵をもたらすポイントが存在する。
【0020】
本発明は、任意の種類のインパルスに対する任意のチャンネルのインパルス応答を推定するために使用されてもよい。特に、インパルスは、例えばマイクロ波、可視光、紫外光又は赤外光、無線信号波、X線等のような、スペクトルの任意部分からの電磁波を含むことができる。現時点では、本願出願人は、本明細書の冒頭で言及したアプリケーションにおいて使用可能なもの等の音響インパルスに対する応答の推定において特定の恩恵を見出している。従って、好適な実施形態の中には、送信されるインパルスが音響インパルスを含むものがある。この実施形態の集合の中では、使用される周波数帯はアプリケーションに依存する。例えば、企図される1つの重要なアプリケーションは、(例えば、コンピュータと人間とのインターフェースの場合において)1メートル未満の程度の距離を介して空中のオブジェクトを追跡することである。このアプリケーション及び類似のアプリケーションの場合は、超音波信号が適切である。従って、本発明のある好適な実施形態の集合においては、インパルスは超音波であり、好適には、信号の帯域幅の中心は20kHzより高く、より好適には30kHzより高く、最も好適には30kHzから50kHzまでの範囲である。
【0021】
企図される別のアプリケーションは、地震探査にある。この場合、インパルスは、下限では数ヘルツの程度にまで広がる可能性がある広い帯域幅を有するであろう。
【0022】
次に、好適な擬似逆行列の例を用いて、計算された逆行列が有する、測定対象であるチャンネルに対する優れた近似をもたらす能力を実証する。
【0023】
まず、チャンネル上への信号の送信は、以下のモデルに従うことが仮定されてもよい。
【0024】
y(t)=h(t)*x(t)+n(t) 式(1)
【0025】
ここで、
x(t)は、送信信号であり、
y(t)は、受信信号であり、
h(t)は、チャンネルのインパルス応答であり、
n(t)は、環境ノイズ項であり、
*は、畳み込み演算子である。
【0026】
送信信号は、時系列として、換言すれば、一定の時間間隔での一連の離散信号値として表される。受信信号は、サンプリングされた信号であるので、やはり時系列として表される。インパルス応答h(t)は、測定されることが求められているものである。チャンネルh(t)は、少なくとも使用される任意の実際の時間ウィンドウ内では、一定であるか、あるいは、x(t)及びy(t)の変化に比べて非常にゆっくりと変化すると仮定される。これは、まさしく本発明の目的である時間的に変動するチャンネルの測定は不可能である、ということではなく、単に、チャンネル変動は信号の変動に比べてゆっくりである必要があるということを示す。
【0027】
チャンネルは、Qタップの有限インパルス応答(FIR)フィルタとして表されることが可能である。当該技術において公知であるように、このことは、チャンネルh(t)が、入力信号の先行するQ個の時間サンプルに適用される一連の重みとしてみなされる構造である。従って、式(1)は、次のように書きかえることができる。
【0028】
【数1】
【0029】
上記モデルは、次のように解釈される。与えられた時間tにおいて、最後のQ個の時間サンプルであるx(t−Q+1),…,x(t)は、h(0),…,h(Q−1)で与えられる重みに従って線形結合されて、現在の入力信号y(t)が与えられる。図2は、上記モデルを示したものである。計算の簡単化のために差し当たり、環境ノイズがない、すなわち、すべてのtについてn(t)=0であると仮定する。ノイズの問題については、後にさらに詳述する。
【0030】
この過程は、ベクトル空間/内積の観点から捉えることもできる。図3に示すように、過程x(t)の最新のQ−1個の実現値の「スナップショット」はベクトルx(t)として構成され、このベクトルx(t)と、フィルタ係数h(0),…,h(Q−1)を含むベクトルhとの内積が、結果y(t)として取り出される。
【0031】
必要とされるものは、ベクトルhの推定である。このベクトルは、入力信号の単一の観察値y(t)と1つのベクトルx(t)とからだけでは、確定的に推定することができない。hに関して曖昧でない情報のために十分な情報を得るのに必要なものは、x(t)過程からの一連の「スナップショットベクトル」x(t),x(t−1),…と、y(t)過程の1つのスナップショットベクトルy(t)=[y(t−N+1),…,y(t)]とである。すると、応答スナップショットベクトルy(t)は、図4に示すように、hと「スナップショットベクトル」x(t),x(t−1),…の各々との内積によって書きかえることができる。
【0032】
行列のセットアップの最終バージョンは、X(t)の要素を次式のように書けることに注意することからわかる。
【0033】
X(t)ij=x(t−i−j) 0≦j≦Q−1,0≦i≦N−1 式(3)
【0034】
これで、X(t)の第1列が、上から下へ時間的に逆行するように、x(t−Q+1)からx(t−Q−N+2)までのx(t)の時間スライスを含むことがわかる。X(t)の第2列は、x(t−Q+2)からx(t−Q−N+3)までのx(t)の時間スライスを含み、以下同様に、最後の列は、x(t−N+1)から時間的に逆行するx(t)の時間スライスを含む。要約すると、行列X(t)の列は、図5に示すように、x(t)の連続的な時間スライスを含んでいる。
【0035】
これで、出力信号ベクトルy(t)が、x(t)の最新のQ個の時間スナップショットベクトルによる線形結合であることがわかる。これが、上記モデルの元の提示に対応するベクトル化されたバージョンである。
【0036】
行列X(t)が十分に条件付けられたものである限り、インパルス応答hは、
推定値
【数2】
を次式のような適切な基準に従って選ぶことにより、いくつもの異なる方法で推定することができる。
【0037】
【数3】
【0038】
ここで、αは、予測変数におけるノイズ及び/又は共線性(co-linearity)の存在下で解の候補を縮小させるために使用される正則化パラメータである。
【0039】
上の式4及び5の解は、公知である次式の通常最小二乗(ordinary least-squares:OLS)推定値及びリッジ又は最小平均二乗(LMS)推定値である。
【0040】
【数4】
【0041】
ここで、「+」演算子はムーア・ペンローズの逆行列を示す。これは当該技術において既知であり、極く簡単に言えば、これは、線形方程式の集合の解に対する、最小二乗アプローチを用いた最良の近似である。解が複数存在する場合は、L2ノルムが最小になるものが選ばれる。
【0042】
ノイズレベルが既知であれば、パラメータαは、統計的平均二乗誤差を最小化するように選定可能である。この技術は、信号処理の技術分野ではLMS法として知られている。ただしこのような場合、通常は、行列X(t)は単一の駆動信号又は圧縮パルスから受信されるサンプルのすべてを包含することが想定される。しかしながら、本発明によれば、駆動信号の部分集合のみを含む行列X(t)を使用することが提案される。このことは、最初の送信より前に信号が消滅するのを待機する必要なしに、hの推定値が経時的に更新されることを可能にする。これにより、スライディングサンプルウィンドウが効果的にもたらされる。
【0043】
LMS法による上述のスライディングウィンドウの定式化は、本質的には、単一のパルス又は重複を避けるように離隔された複数のパルスのみを使用するものとは対照的な、連続なLMS法である。これは、離散サンプルではなく信号の時間連続(すなわち、アナログ)表現を有していることを単に示している、時間連続なLMS法と混同されるべきではない。
【0044】
これまでに述べた分析から、送信信号の計算された逆行列、例えば擬似逆行列を受信信号へ適用すると、送信信号の全体にわたる相互の直交性を必要とすることなく、音響チャンネルの優れた推定が得られることがわかる。事実、性能を決定する重要なファクタは、送信信号の個々の部分が互いに線形独立になっている度合いである。これは、相互に直交していることよりも、条件の厳しさに関してははるかにゆるいものである。線形独立であることの重要性は式(5)から生じるが、ここでは、信号の複数の部分を可能な限り線形独立にすることでチャンネル推定の曖昧さが最小化される。このような曖昧さは行列X(t)の条件付けの品質を低下させ、結果的に、先の式(4)に対してより多くの可能な解をもたらしてしまう。さらに、X(t)の複数の列における共線性はX(t)がいくつかの小さな特異値を有することを含意するので、hの推定の分散は増大し、延いてはこれが、例えば擬似逆行列の演算の際に、付加的ノイズ成分を拡大させるように影響する。
【0045】
後に示すように、本発明の逆行列演算技術は、先に述べた構造的ノイズの問題から被る悪影響がはるかに少ない。その理由は、この構造的ノイズが受信信号の一部を形成していて、計算された逆行列がこれに適用されるということにある。これには、構造的ノイズをランダム化又は白色化し、よって平均化を容易にするという効果のあることがわかる。
【0046】
擬似逆行列等の逆行列の計算が計算集約的なタスクである点は、重要な考慮事項である。必要な逆行列は、受信信号へ当該逆行列を適用するのと同時に、又はその直前に計算可能である。簡単なアプリケーションでは、インパルス信号の送信時にこれをリアルタイムで行うことも可能である。しかしながら、これでは、達成可能な分解能(時間及び空間の双方)が制限される。これに対処するため、チャンネル推定は事後の遡及的分析として実行されてもよい。しかしながら、これは、多くのアプリケーションにとって不適切であろう。
【0047】
しかしながら、好適には、逆行列はインパルス信号の送信に先立って計算される。本願出願人は、これを行う能力が本発明に係る好適な方法の重要な優位点であると認識している。このことは、分解能の大幅な制限又は高価な処理パワーの要件なしにリアルタイム実装を可能にする。計算された逆行列、例えばX(t)+は、予め決められた信号x(t)から事前に計算されてメモリに格納され、次いでy(t)におけるサンプルのスナップショットベクトルと事前に乗算するためのルックアップ表として使用されることが可能である。リアルタイムの逆行列演算は、不要である。この利点の意義は、これを、特許文献1に記載されている最近の従来技術による教示と比較すればより良く理解することができる。特許文献1では、応答信号y(t)の時間サンプルから構成される行列の逆行列を演算することが必要であるようにモデルが構築され、この場合、測定後の逆行列演算が不可避である。従って、特許文献1における教示内容では、分散されたネットワーク上の多数のコンピュータ間で必要な処理を分割する方法に重点が置かれている。これに対して、本発明の一実施形態は、後述するように、標準的なデスクトップ型パーソナルコンピュータ上への実装に成功している。
【0048】
受信信号は、通常、環境におけるオブジェクトの表面からの反射と、信号が伝搬する媒体(例えば、音響信号の場合は空気)の影響との結果である。しかしながらまた、受信信号は、環境の一部を反射せずに通過している可能性もある。このことは、例えば、送信機(もしくは送信機が取り付けられたオブジェクト)を空間中で位置決めするための簡単なシステムの場合にあてはまる可能性がある。
【0049】
送信信号、延いては受信される応答は、使用されるハードウェアの制約内のブロードバンド信号である可能性がある。しかしながら、少なくともいくつかの好適な実施形態では、これらの帯域幅は意図的に制限される。制限なしであればブロードバンドである信号の帯域幅を制限することは、信号に冗長性を導入することに相当するので、これは、チャンネル推定の計算に要する計算量を削減する点で効果的である。
【0050】
一例を挙げると、帯域幅は、そのもとの範囲の3分の1まで制限されてもよい。行列演算に含まれる全内積との密接な相関を達成するには、本来必要とされたであろう内積における乗算回数の約3分の1で足りるので、完全なベクトルから抽出されるベクトル要素がエイリアシング効果を生じないように選定されていれば、送信されるインパルスx(t)及び受信される信号y(t)における後続の時間サンプルは所定の程度の冗長性を呈示する。
【0051】
さらに、送信信号x(t)及び受信信号y(t)の帯域が制限される場合は、チャンネル推定値
【数5】
も同じく制限される。従って、いくつかのアプリケーションでは、
【数6】
における削減された個数のタップを推定すれば(この場合もやはり、
【数7】
におけるフィルタタップがエイリアシングを回避するように選定されているとして)、他のタップを十分な予測品質で十分に予測することができる。この場合もやはり、必要な計算量は削減され、よって、可能なアプリケーションは広がり、かつ/又は、分析を実行し得る速度は高まり、これにより、より高い時間分解能の達成が可能になる。規則正しい間隔で行われる選択は単にサンプリングレートを削減することに等価になるので、サンプルの選定はランダムであること、又は擬似ランダムシーケンスに従うことが好ましい。
【0052】
ある好適な実施形態の集合では、チャンネル推定は、環境のあらゆる特徴をモニタリングするために使用される。例えば、これは、石油探査にとって大きな価値をもつ海底面を測定するために使用可能である。この場合の「チャンネル」は、海底と、介在する海水である。本発明に従って達成され得る優位点は、十分な分解能を保ちながら、従来技術を使用する場合よりはるかに迅速に海底を走査できることにある。これは、送信した信号が消滅するのを待つ必要がなくかつ可能な限り高度に相互に直交する複数の送信符号を構築する必要なしにチャンネル推定の連続的な更新をもたらす、本発明により与えられる能力の成果である。このような実施形態の他の例としては、医療法画像化処理、セキュリティのスキャン処理、ロボットビジョン等がある。
【0053】
さらなる態様から見ると、本発明は、環境をマッピングする方法を提供し、本方法は、インパルス信号を上記環境へ送信することと、上記環境からの戻り信号を検出することと、上記インパルス信号の計算された逆行列を上記戻り信号へ適用することとを含む。
【0054】
また、インパルス信号を環境へ送信する手段と、上記環境からの戻り信号を検出しかつ上記インパルス信号の計算された逆行列を上記戻り信号へ適用する手段とを備える、環境をマッピングするためのマッピング装置も提供される。
【0055】
本発明はまた、環境へ送信されるインパルス信号の計算された逆行列を上記環境からの戻り信号へ適用する手段と、これにより上記環境の表現を計算する手段とを備える、環境をマッピングするためのコンピュータソフトウェア製品を包含する。
【0056】
好適には、上記マッピング方法は、推定されたチャンネル応答に基づいて位置ダイアグラムを構築することを含む。これは、連続したインパルス応答推定値が互いに隣接して提示された表現である。このようなダイアグラム内の特徴部分、例えば反射体の端又は中心は、次に、標準的な画像処理技術を用いて識別可能である。例えば、海底等の地形上において定速で送信機を移動させることによって、海底のプロファイルがスキャンされる。
【0057】
別の好適な実施形態の集合では、チャンネル推定は、移動するオブジェクトの追跡に使用される。この場合の「チャンネル」は、オブジェクト及び周囲の空間である。ここでは、チャンネル推定を連続的に更新する能力が不可欠である。このようなアプリケーションは、オブジェクトが非常にゆっくりと移動しているか、非常に低い空間分解能で十分であるというのではない限り、従来技術の送信−受信−待機技術では当然ながら不可能である。以下の例でわかるように、本発明の一実施形態によれば、標準的なデスクトップPCと、一般的なPCラウドスピーカと、2つの一般的なマイクロホンとを用いて、指先の高速移動をミリメートル未満の精度で追跡し得ることが示されている。これは、物理的接触の必要性を取り除いた人間とマシンとのインターフェースにおいて、多くの可能なアプリケーションを有する。本願出願人が企図するこのようなアプリケーションのうちの特定の1つは、特に病院における、医療機器のためのインターフェースにおけるものであり、病院では、物理的接触の必要性の回避によって、機器を介した相互感染の危険性が低下する。
【0058】
さらに他の態様から見ると、本発明はオブジェクトを追跡する方法を提供し、本方法は、インパルス信号を送信することと、上記オブジェクトからの上記インパルス信号の反射を記録することと、上記インパルス信号の計算された逆行列を上記反射された信号へ適用することとを含む。
【0059】
好適には、上記方法はさらに、推定されたチャンネル応答に基づいて位置ダイアグラムを構築することと、例えば追跡されているオブジェクトの位置を計算するために適切な画像処理技術を用いて、上記位置ダイアグラムを解釈することとを含む。
【0060】
また、送信手段と、受信手段と、処理手段とを備える追跡装置も提供され、上記処理手段は、上記送信手段によって送信されたインパルス信号の計算された逆行列を、上記受信手段によって受信された信号へ適用するように構成される。
【0061】
本発明はまた、オブジェクトへ向けて環境内へ送信されるインパルス信号の計算された逆行列を、上記オブジェクトから反射される戻り信号へ適用する手段と、これにより、上記オブジェクトのロケーションを計算する手段とを備える、オブジェクトを追跡するためのコンピュータソフトウェア製品を包含する。
【0062】
一般に、組み合わされた一対の送信機及び受信機毎に、1次元での追跡が可能になる。従って、2次元の追跡を行う場合は、2つの受信機、又は好適には2つの送信機が必要である。これらの2つの場合において、共通の送信機又は受信機がそれぞれ使用可能である。しかしながら、このことは必須ではなく、代わりに別々のものが使用されてもよい。2つの送信機は、独立した信号によって駆動されてもよい。あるいは、これらは同じ信号によって駆動されてもよいが、ただし、このとき各信号には互いに時間遅延が付加されている。このことは、信号が互いに区別されることを可能にする。これと同じ効果は、送信機のうちの1つを追跡領域から物理的にオフセットすることによっても達成可能である。
【0063】
いくつかの企図される実施形態では、2つの送信機、例えばラウドスピーカは、同じ周波数帯からの信号のそれぞれによって駆動され、これらの信号は受信機において分離される。これは、以下の説明から理解することができる。
【0064】
受信機(例えば、マイクロホン)で受信される信号は、送信された(そして畳み込まれた)信号の合成信号である。
【0065】
y(t)=h1(t)*x1(t)+h2(t)*x2(t) 式(6a)
【0066】
これは、行列/ベクトル表記では次式になる。
【0067】
【数8】
【0068】
ここで、以下の表記を用いた。
【0069】
X(t)=[X1(t)X2(t)]
h(t)=[h1(t)Th2(t)T]T
【0070】
本発明に係る方法を使用すれば、誤差及び摂動に関して結果が安定であるように行列X(t)の大きさが選定されることを保証しながら、インパルス応答h1(t)及びh2(t)の双方を含むベクトルh(t)を推定することができる。
【0071】
当然ながら、3次元追跡では、余分な送信機又は受信機を追加することができる。本発明の方法は、理想的には、前述の分析から理解できるように、複数の送信機及び受信機とともに使用されることに適する。例えば、これらの複数の構成要素は、アレイ処理や、アレイ画像生成及び分析を実行するために使用されてもよい。実際に、本発明の方法は、本発明の方法を使用できるアプリケーションと音声及び画像生成技術との分野において大きな効力を有する。これは、実際の演算より前に信号行列の逆行列を演算することによりもたらされる、計算集約的な演算を実行する能力に由来する。
【0072】
オブジェクトを2次元又は3次元で位置決めするためには、異なる信号が適切に合成されなければならない。好適には、異なる信号に対応するインパルス応答推定を合成して、追跡されているオブジェクトを位置決めするためには、楕円の交差が使用される。言いかえれば、インパルス応答のピークを強い反射体によるものであると解釈することにより、反射体は、受信機/送信機を焦点として有し、送信機から反射体へ到達して戻る伝搬時間により与えられる径を有する楕円面上に存在するものとみなされる。複数の送信機/受信機が使用されれば、反射体は受信機−送信機の伝搬時間の3つ組に対応する楕円面の交点に存在し、これらの楕円面の共通の交点として識別されることが可能である。
【0073】
本発明に係る上述のマッピング及び追跡の用途は、共通する重要な特徴を有する。すなわち、受信機は送信機が生成するインパルスに対するチャンネルの応答のみを受信して分析するという意味で、これらは閉じたものである。実際に、本発明の場合は一般にはこのことは事実であり、送信機と受信機との間で情報は伝達されない。本発明は、送信される内容を、それが計算された逆行列に変形されているにしても、受信機が正確に認識しているということに基づくものである。「情報」は逆行列の計算に必要とされるので、論理的には情報は伝達可能ではない。
【0074】
好適には、送信される信号と受信される応答とに使用されるサンプリングレートは同じである。しかしながら、これは必須ではなく、異なる場合もある。サンプリングレートとしては、アプリケーション及び要求される分解能に依存して、数ヘルツからギガヘルツまでの何れかの値が使用可能である。
【0075】
本願出願人は、本発明に従って説明している連続なLMS法が、残存エコー及びノイズに対して頑健であるゆえに効果的であることを認識している。以下、このことを説明する。式(1)に残存エコー及びノイズの双方を包含させると、次式になる。
【0076】
【数9】
【0077】
ここで、n(t)はチャンネルノイズであり、s(t)は残存エコーからの寄与分である。このエコーは、明らかに、信号x(t)のうちの何らかの先行部分がフィルタリングされたものになる。言いかえれば、s(t)への寄与分は、前述の分析で検討したベクトル[x(t−Q+1),…,x(t)]に含まれるものよりも先行するx(t)のサンプルから生じるもののはずである。これらの先行するサンプルは、ベクトルh内に保持されるタップの外部にある障害又は影響に対応する別のフィルタタップと畳み込み演算される。これらの別のタップは、フィルタg(t)によって、次式のように表される。
【0078】
【数10】
【0079】
ここで、Mは最大残響時間(又はエコーの残存時間)である。行列表記に移行すると、式(7)及び(8)は、ブロック形式では次式のように表される。
【0080】
y(t)=X(t)h+X2(t)g+n(t) 式(9)
【0081】
ここで、X2(t)は、中心のQタップウィンドウの外側にある、上述の行列形式による信号の一部を含み、gは、「ウィンドウの外」のフィルタタップによるベクトルであり、n(t)は、付加的チャンネルノイズを含むベクトルである。
【0082】
本発明に係る逆行列演算技術を使用し、上述の式(9)に擬似逆行列X(t)+を左から乗算すると、次式が得られる。
【0083】
【数11】
【0084】
ここで、以下の表記を用いた。
【0085】
m(t)=X(t)+X2(t)g+X(t)+n(t)
【0086】
2行目の右辺の第1項に関して、X(t)+X(t)=Iであれば、
【数12】
であり、そうでなければ、これは、(ムーア・ペンローズの逆行列の定義により)hの最小二乗最小ノルム推定値になる。この行の第2項は、残存エコーに関連している。一般に、残存エコーX2(t)gは、冒頭で問題点について説明した「構造的」なノイズの形式になるが、X(t)+X2(t)gはこの構造をもたない。これは、X(t)及びX2(t)に含まれるx(t)の複数の信号が従属したものでなく、残存エコーX2(t)gにX(t)+を予め乗算することには残存エコーの時間的構造を歪める効果があるということに起因する。さらにこのことは、異なるスライディング行列の対X(t)及びX2(t)でも異なってくる。ゆえに、残存エコーは、経時的に蓄積される、やっかいな反復的ファクタにはならず、むしろ、成分n(t)に類似した一般的なノイズ成分のように作用する。言いかえると、残存エコーは一般的なノイズ源であるが、構造的であるか否かに関わらず、このノイズに、時間的に変化するランダム要素に基づく行列、すなわち逆行列X(t)+を予め乗算することにより、いかなる時間的な反復構造もノイズ源から除去される。その結果、真のhと同一であるかこれに近い値を有する可能性のある推定値
【数13】
が観察されて、時間的に変化する誤差項m(t)へ加算されるとき、
【数14】
を一定期間にわたって平均化することにより、このようなノイズ項の影響を最小化することができる。式(5)におけるように、リッジ回帰が使用される場合にも、同じことが言える。
【0087】
本発明を使用する方法及び装置は、相互相関を使用するものよりも効果的であることを先に述べた。以下、これについて説明するが、まずは、本明細書で言及した相互相関の動作方法について説明する。
【0088】
信号x(t)がラウドスピーカを介して送信されたと仮定すると、これは、マイクロホンを介して同じくy(t)として受信される。受信信号y(t)は、送信信号に対して、次式のように関連しているものと考えられる。
【0089】
【数15】
【0090】
すなわち、y(t)のあるサンプルは、x(t)における最後のK個のサンプルの線形結合であり、線形重みは「フィルタ係数」h(0),…,h(K−1)において与えられる。チャンネルを推定するためには、これらのフィルタ係数を推定することが必要である。この技術において、信号x(t)は、負の無限大から正の無限大までのすべてのtについて「白色」であると仮定される。言いかえれば、信号はすべての非ゼロシフトについて当該信号自体と無相関であると仮定されている。このことは次式のように表される。
【0091】
【数16】
【0092】
ここで、Pは正の実数である。
【0093】
信号と、その信号自体の時間反転したものとの畳み込み演算を行うことは、その信号自体との相関、すなわち信号の自動相関を計算することと同じである。よって、x(t)が実際に白色であることを仮定すれば、x(t)をそれ自体と相関させることにより、時間ラグ0の場合は正の値Pが生じ、その他のすべての場合ではゼロが生じる。これを別の方法で表記すると、次式になる。
【0094】
x(t)*x(−t)=P・∂(t) 式(C)
【0095】
ここで、∂(t)はディラックのデルタ関数である。
【0096】
ここで、次式のように、N+1個のサンプル長及びx(t)の時間ウィンドウで、時間軸上の点t0のほぼ周辺においても式(B)が成り立つと仮定する。
【0097】
【数17】
【0098】
t0の周囲でy(t)とx(−t)との畳み込みを行うと、次式が得られる。
【0099】
【数18】
【0100】
この和における内項を計算すると、次式が得られる。
【0101】
【数19】
【0102】
よって、次式が得られる。
【0103】
【数20】
【0104】
上記式(D)からわかるように、式(G)における括弧内の項は、l=iのとき、かつそのときに限り(およそ)Pであり、そうでなければ(およそ)0である。ゆえに、l=1を選ぶことにより、畳み込み
【数21】
は、P×h(1)になり、l=2であれば、P×h(2)、等となる。このようにして、フィルタ係数h(.)は、x(t)のウィンドウと、所定の「中心」の時間サンプルt0の周囲のl(t)のウィンドウとの畳み込みを行うことにより推定可能である。しかしながら、式(D)における近似は近似でしかない。実際には、局所的に連続して白色であるという特性を有するシーケンスx(t)を発見することは非常に困難であり、上述の式におけるN及びKの多くの望ましい選択の場合、これは不可能である。これにより、全体的な推定品質の性能は制限される。
【0105】
上述の相互相関法は、式(5及び6)において本発明の説明のために用いたものと同様の枠組みに当てはめることが可能である。この場合、推定量は、次式になるであろう。
【0106】
【数22】
【0107】
これは、低品質の推定量である。X(t)が直交行列である場合、解は、LS又はLMS又はリッジ推定量(スケーリング定数まで)と同一になる。しかしながら、一般には、関連したスライディングウィンドウ行列X(t)が一般に直交行列であるという特性を有する時系列x(t)を構築することは困難である。これは、直交符号の形式をとる比較的長さの短いシーケンスを発見するという問題点に起因する。その結果、相互相関に基づく方法では符号シーケンスの選択が不可欠であるが、連続なLMS法ではさほど重要ではない。
【0108】
図6は、インパルス応答推定のシーケンスの例を示したものである。本例は、インパルス応答は変化しない人為的に作った場合の事例であるが、これは相対的な分解能の明確性を示そうとするためのものである。画像の縦のスライスは、連続した時点におけるインパルス応答推定値に対応し、すなわち、画像は先に述べた位置ダイアグラムである。左側のパネルには、相互相関法を用いて得られた結果が示され、右側のパネルでは、本発明に係る連続なLMS法が使用されている。相互相関の画像では望ましくないアーティファクトの存在が明らかであり、LMSに比べて、その後の追跡タスクはより困難になる。
【0109】
少なくともいくつかの好適な実施形態において述べたように、帯域幅は、使用されるハードウェアの制約を超えて意図的に制限される。これは、次に説明するように、必要な計算量の低減において優位点を有する。
【0110】
信号の帯域が制限される場合、信号x(t)には時間的な冗長度が存在し、よって、行列X(t)の行及び列も冗長性を帯びる。この影響で、行列X(t)の階数は下がる。これにより、真のインパルス応答hの推定精度は低下させられるが、計算量もずっと削減することができる。
【0111】
ここで、次式を、X(t)の節約された特異値分解であるとする。
【0112】
【数23】
【0113】
ここで、{σi}は非ゼロの特異値であり、{ui,vi}は左側及び右側の特異ベクトルである。行列U=(u1,u2,…,ur),V=(v1,v2,…,vr),及びS=diag(σ1,σ2,…,σr)は、個数r=rank(X(t))の左右の特異ベクトル及び特異値をそれぞれ含む。X(t)が高度に共線的であれば、特異値の多くはゼロに近くなる。このことは、以下の近似を可能にする。
【0114】
【数24】
【0115】
これは、X(t)のk成分近似である。行列Uk,Sk,Vkは、この行列の最初のk個の特異ベクトル及び特異値のみを含む。さらに、これで、X(t)の擬似逆行列推定を、次式で表すことができる。
【0116】
【数25】
【0117】
この時点で、行列Uk,Sk,Vkは削減された個数の列及び行を有するので、T及びPは、次式により表される。
【0118】
T=VkSk−1
P=UkT
【0119】
X(t)が(N×Q)行列であれば、X(t)+は(Q×N)になり、ゆえに、TはQ×Kになり、Pは(N×K)になる。チャンネルhを推定するためにX(t)の擬似逆行列を適用すると、次式になる。
【0120】
【数26】
【0121】
ここで、積Py(t)の計算にはN×K回の演算(乗算及び和演算)が必要であり、結果Py(t)とTとの積の計算にはQ×K回の演算が必要である。このことは、総演算回数が(N+Q)×Kであることを意味する。元の方法の代替方法は、直にX(t)+との乗算を行うため、N×Q回の演算が必要である。N=200,Q=70及びK=Q/3〜23が、X(t)に係るランクが削減されかつ十分に良好な推定をもたらす場合(典型的には、元の周波数帯の1/3に制限された信号を使用するとき)では、y(t)とX(t)+との乗算の総演算回数は200×70=14000になるが、これに対して、y(t)にまずPを乗算して次にTを乗算すると、合計の演算回数は(N+Q)×K=(200+70)*23=6210になる。このことは、演算時間の半分以上が節約されたことを意味する。提案している低減の実装は、各時間ウィンドウにつき、1つの(X(t)+)ではなく、2組の行列T,Pを格納することを含む。
【0122】
上記内容は、本発明のさらに好適な特徴をもたらす。本発明の方法に係る少なくともいくつかの好適な実装においては、計算された逆行列は、インパルス信号行列の特異値分解の部分集合から導出される一対の行列を含み、本方法は、これらの行列に、上記受信信号のサンプルを含むベクトルを乗算するステップを含む。好適には、本方法はさらに、上記受信信号のサンプルの部分集合を選択して部分集合ベクトルを生成することと、上記一対の行列に上記部分集合ベクトルを乗算することとを含む。
【0123】
別の好適な特徴によれば、本方法は、上記逆行列の行及び/又は列の部分集合を計算することと、上記部分集合間での補間演算を行って上記計算された逆行列を完成させることとを含む。
【0124】
次に、本発明の実装例について説明する。ただし、これは理解を助ける目的で行うものであり、本発明の範囲を限定するものとして理解されるべきではない。
【0125】
サウンドカードにより駆動される標準的なPCラウドスピーカを用いて、指先追跡システムを構築した。サウンドカードには、反射される信号を記録するために2つの標準的なPCマイクロホンも接続した。当然ながら、専用の超音波トランスデューサ又はハイドロホンを代わりに使用してもよい。
【0126】
0乃至20kHzの帯域におけるディジタル白色ノイズをディジタル信号プロセッサ(DSP)により生成し、ここで、各時間サンプルは区間[−1,1]から引き出され、上記ディジタル白色ノイズを、ディジタル−アナログ変換器を介してサウンドカードへ送り、よってラウドスピーカまで送った。マイクロホンから受信される信号は、サウンドカードを介してアナログ−ディジタル変換器(すなわち、サンプラ)へ向けて送った。約22kHzのサンプリングレートを使用した。サンプリングされた信号は、DSPへ送った。DSPはまた、送信信号の予め計算された擬似逆行列を保持するメモリ記憶装置にも接続されている。これは、次に、所定のウィンドウ内の受信される応答サンプルの行列を予め乗算するために使用される。
【0127】
典型的なパラメータは、以下の通りである。行列X(t)の大きさを200×70であるように選択し(x(t)信号の200個のスナップショットを用いて70個のフィルタタップを推定する)、インパルス応答推定の更新を毎秒100回行うと、合計で毎秒200×70×100=140万回の乗算及び加算演算、又は1.4メガフロップになる。これは、バックグラウンド演算としてソフトウェアで実装したり、又は安価なDSP上で実行したりすることが可能な、適度の演算回数である。演算回数は、整数演算になるように圧縮されてもよい。さらに、この目的のために、プロセッサの並列化と、単一命令複数データ命令(single instruction multiple data instructions)と、専用のコプロセッサを使用してもよい。
【0128】
結果としての計算されたタップは、図6の右側のパネルに示すものと同様の位置ダイアグラムにプロットされる。これは、実際上、時間(横軸)に対する送信機/受信機からの変位(縦軸)のプロットである。従って、図6におけるプロットは、静止した反射体に関するものである。位置ダイアグラムは、信号毎について、すなわちラウドスピーカ毎についてプロットされる。
【0129】
2次元トレースをプロットするためには、反射体の移動の概要をプロットできるようにするために、楕円の交差を用いて2つのダイアグラムが連続的に合成される。図7は、指の追跡に使用される画像の例と、上述の装置によって結果的に得られたプロットとを示す。反射体の非常に小さな移動も明確に解像されていることが観察されるであろう。例えば、右側のプロットは、事実上、左側の輪郭におけるいくつかの連続したトレーシングで構成されることもわかる。
【図面の簡単な説明】
【0130】
【図1a】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、所定の出力装置を介してインパルスが駆動され、結果的に生じる信号が所定の入力装置を介して受信される様子を示す図である。
【図1b】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、インパルスをより高頻度で送信したときを示す図である。
【図1c】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、出力インパルスがさらに高頻度で送信されたときを示す図である。
【図1d】送信されるパルスと先行パルスからのエコーとの間に干渉が存在する場合の問題を示す図であり、図1(c)の波形からの単一の「インパルス応答スライス」を示す図である。
【図1e】
【図2】与えられた時間tにおいて、最後のQ個の時間サンプルであるx(t−Q+1),…,x(t)は、h(0),…,h(Q−1)で与えられる重みに従って線形結合されて、現在の入力信号y(t)が与えられるモデルを示す図である。
【図3】過程x(t)の最新のQ−1個の実現値の「スナップショット」はベクトルx(t)として構成され、このベクトルx(t)と、フィルタ係数h(0),…,h(Q−1)を含むベクトルhとの内積が、結果y(t)として取り出されることを示す図である。
【図4】hとスナップショットベクトルx(t),x(t−1),…の各々との内積を示す図である。
【図5】行列X(t)の列がx(t)の連続的な時間スライスを含んでいることを示す図である。
【図6】インパルス応答推定のシーケンスの例を示す図である。
【図7】指の追跡に使用される画像の例と、上述の装置によって結果的に得られたプロットとを示す図である。
【特許請求の範囲】
【請求項1】
チャンネルのインパルス応答を推定する方法であって、インパルス信号を上記チャンネルへ送信することと、上記チャンネルからの受信信号を検出することと、上記インパルス信号の計算された逆行列を上記受信信号へ適用して上記チャンネルのインパルス応答の推定値を計算することとを含む方法。
【請求項2】
環境をマッピングする方法であって、インパルス信号を上記環境へ送信することと、上記環境からの戻り信号を検出することと、上記インパルス信号の計算された逆行列を上記戻り信号へ適用することとを含む方法。
【請求項3】
オブジェクトを追跡する方法であって、インパルス信号を送信することと、上記オブジェクトからの上記インパルス信号の反射を記録することと、上記インパルス信号の計算された逆行列を上記反射された信号へ適用することとを含む方法。
【請求項4】
上記インパルス信号を連続して送信することを含む請求項1、2又は3記載の方法。
【請求項5】
上記インパルス信号を連続的又は継続的に送信することを含む請求項4記載の方法。
【請求項6】
上記逆行列を計算するステップを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項7】
上記計算された逆行列はリッジ逆行列を含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項8】
上記計算された逆行列はムーア・ペンローズの逆行列を含む、請求項1乃至6のうちのいずれか1つに記載の方法。
【請求項9】
上記インパルスは音響インパルスである、先行する請求項のうちのいずれか1つに記載の方法。
【請求項10】
上記インパルスは超音波である請求項9記載の方法。
【請求項11】
上記インパルスの帯域幅の中心は20kHzから50kHzの間にある請求項10記載の方法。
【請求項12】
スライディングウィンドウを用いて上記受信信号をサンプリングすることを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項13】
上記インパルス信号を非反復符号から生成することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項14】
上記インパルス信号を、互いに線形独立な少なくともいくつかの個々の部分を有する符号から生成することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項15】
上記インパルス信号は白色ノイズを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項16】
上記インパルス信号の送信より前に上記逆行列を計算することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項17】
上記インパルス信号の帯域幅を送信機及び受信機サブシステムの帯域幅の一部へ制限することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項18】
上記逆行列の行及び/又は列の部分集合を計算することと、上記部分集合間での補間演算を行って上記計算された逆行列を完成させることとを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項19】
上記計算された逆行列は、インパルス信号行列の特異値分解の部分集合から導出される一対の行列を含み、上記方法は、上記行列に、上記受信信号のサンプルを含むベクトルを乗算するステップを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項20】
上記受信信号のサンプルの部分集合を選択して部分集合ベクトルを生成することと、上記一対の行列に上記部分集合ベクトルを乗算することとを含む請求項19記載の方法。
【請求項21】
上記インパルス信号の計算された逆行列を上記戻り信号へ適用する上記ステップの結果として生じる推定されたチャンネル応答に基づいて、位置ダイアグラムを構築することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項22】
同じ周波数帯からの個々の信号によって複数の送信機を駆動することと、複数の受信信号を受信機において分離することとを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項23】
楕円又は楕円面の交差を用いて複数の推定されたチャンネル応答を合成することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項24】
上記インパルス信号と上記受信される応答信号を同じレートでサンプリングすることを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項25】
チャンネル応答を推定するための装置であって、送信手段と、受信手段と、処理手段とを備え、上記処理手段は、上記送信手段により送信されたインパルス信号の計算された逆行列を上記受信手段により受信された信号へ適用するように構成される装置。
【請求項26】
送信手段と、受信手段と、処理手段とを備える追跡装置であって、上記処理手段は、上記送信手段によって送信されたインパルス信号の計算された逆行列を、上記受信手段によって受信された信号へ適用するように構成される追跡装置。
【請求項27】
環境をマッピングするためのマッピング装置であって、インパルス信号を上記環境へ送信する手段と、上記環境からの戻り信号を検出して、上記インパルス信号の計算された逆行列を上記戻り信号へ適用する手段とを備えるマッピング装置。
【請求項28】
上記送信手段は上記インパルス信号を連続して送信するように構成される請求項25、26又は27記載の装置。
【請求項29】
上記送信手段は上記インパルス信号を連続的又は継続的に送信するように構成される請求項28記載の装置。
【請求項30】
上記逆行列を計算する手段を備える、請求項25乃至29のうちのいずれか1つに記載の装置。
【請求項31】
上記計算された逆行列はリッジ逆行列を含む、請求項25乃至30のうちのいずれか1つに記載の装置。
【請求項32】
上記計算された逆行列はムーア・ペンローズの逆行列を含む、請求項25乃至30のうちのいずれか1つに記載の装置。
【請求項33】
音響インパルスを生成する手段を備える、請求項25乃至31のうちのいずれか1つに記載の装置。
【請求項34】
上記インパルスは超音波である請求項33記載の装置。
【請求項35】
上記インパルスの帯域幅の中心は20kHz乃至50kHzの間にある請求項28記載の装置。
【請求項36】
スライディングウィンドウを用いて上記受信信号をサンプリングする手段を備える、請求項25乃至35のうちのいずれか1つに記載の装置。
【請求項37】
上記インパルス信号を非反復符号から生成する手段を備える、請求項25乃至36のうちのいずれか1つに記載の装置。
【請求項38】
上記インパルス信号を、互いに線形独立な少なくともいくつかの個々の部分を有する符号から生成する手段を備える、請求項25乃至37のうちのいずれか1つに記載の装置。
【請求項39】
上記インパルス信号は白色ノイズを含む、請求項25乃至28のうちのいずれか1つに記載の装置。
【請求項40】
上記インパルス信号の送信より前に上記逆行列を計算するように構成される、請求項25乃至30のうちのいずれか1つに記載の装置。
【請求項41】
上記インパルス信号を、上記送信機及び受信機サブシステムの帯域幅の一部である帯域幅で生成する手段を備える、請求項25乃至39のうちのいずれか1つに記載の装置。
【請求項42】
上記逆行列の行及び/又は列の部分集合を計算すべく選択するように適応化されたセレクタ手段を備える、請求項25乃至41のうちのいずれか1つに記載の装置。
【請求項43】
上記計算された逆行列における行及び/又は列の上記部分集合間を補間する手段を備える請求項42記載の装置。
【請求項44】
上記計算された逆行列を、上記インパルス信号行列の特異値分解の部分集合から導出される一対の行列に分解する手段を備える、請求項25乃至43のうちのいずれか1つに記載の装置。
【請求項45】
上記受信信号のサンプルの部分集合を選択して部分集合ベクトルを生成し、上記一対の行列に上記部分集合ベクトルを乗算する手段を備える請求項44記載の装置。
【請求項46】
上記インパルス信号の計算された逆行列を上記戻り信号へ適用することから結果的に生じる推定されたチャンネル応答に基づいて、位置ダイアグラムを構築する手段を備える、請求項25乃至45のうちのいずれか1つに記載の装置。
【請求項47】
同じ周波数帯からの個々の信号によって駆動されるように構成される複数の送信機を備え、上記受信機は各受信信号を分離するように構成される、請求項25乃至46のうちのいずれか1つに記載の装置。
【請求項48】
楕円又は楕円面の交差を用いて複数の推定されたチャンネル応答を合成する手段を備える、請求項25乃至47のうちのいずれか1つに記載の装置。
【請求項49】
上記インパルス信号と上記受信される応答信号を同じレートでサンプリングする手段を備える、請求項25乃至48のうちのいずれか1つに記載の装置。
【請求項50】
実行される場合は、請求項1乃至24のうちのいずれか1つに記載の方法を実行するように適応化されたコンピュータソフトウェア製品。
【請求項51】
チャンネルのインパルス応答を推定するためのコンピュータソフトウェア製品であって、送信信号を表す行列の計算された逆行列を、受信される応答信号の複数のサンプルへ適用する手段を備えるコンピュータソフトウェア製品。
【請求項52】
環境をマッピングするためのコンピュータソフトウェア製品であって、上記環境へ送信されるインパルス信号の計算された逆行列を、上記環境からの戻り信号へ適用する手段と、これにより上記環境の表現を計算する手段とを備えるコンピュータソフトウェア製品。
【請求項53】
オブジェクトを追跡するためのコンピュータソフトウェア製品であって、上記オブジェクトへ向かって上記環境へと送信されるインパルス信号の計算された逆行列を、上記オブジェクトから反射される戻り信号へ適用する手段と、これにより上記オブジェクトのロケーションを計算する手段とを備えるコンピュータソフトウェア製品。
【請求項54】
請求項50乃至53のうちのいずれか1つに記載のコンピュータソフトウェア製品を担うキャリア。
【請求項1】
チャンネルのインパルス応答を推定する方法であって、インパルス信号を上記チャンネルへ送信することと、上記チャンネルからの受信信号を検出することと、上記インパルス信号の計算された逆行列を上記受信信号へ適用して上記チャンネルのインパルス応答の推定値を計算することとを含む方法。
【請求項2】
環境をマッピングする方法であって、インパルス信号を上記環境へ送信することと、上記環境からの戻り信号を検出することと、上記インパルス信号の計算された逆行列を上記戻り信号へ適用することとを含む方法。
【請求項3】
オブジェクトを追跡する方法であって、インパルス信号を送信することと、上記オブジェクトからの上記インパルス信号の反射を記録することと、上記インパルス信号の計算された逆行列を上記反射された信号へ適用することとを含む方法。
【請求項4】
上記インパルス信号を連続して送信することを含む請求項1、2又は3記載の方法。
【請求項5】
上記インパルス信号を連続的又は継続的に送信することを含む請求項4記載の方法。
【請求項6】
上記逆行列を計算するステップを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項7】
上記計算された逆行列はリッジ逆行列を含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項8】
上記計算された逆行列はムーア・ペンローズの逆行列を含む、請求項1乃至6のうちのいずれか1つに記載の方法。
【請求項9】
上記インパルスは音響インパルスである、先行する請求項のうちのいずれか1つに記載の方法。
【請求項10】
上記インパルスは超音波である請求項9記載の方法。
【請求項11】
上記インパルスの帯域幅の中心は20kHzから50kHzの間にある請求項10記載の方法。
【請求項12】
スライディングウィンドウを用いて上記受信信号をサンプリングすることを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項13】
上記インパルス信号を非反復符号から生成することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項14】
上記インパルス信号を、互いに線形独立な少なくともいくつかの個々の部分を有する符号から生成することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項15】
上記インパルス信号は白色ノイズを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項16】
上記インパルス信号の送信より前に上記逆行列を計算することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項17】
上記インパルス信号の帯域幅を送信機及び受信機サブシステムの帯域幅の一部へ制限することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項18】
上記逆行列の行及び/又は列の部分集合を計算することと、上記部分集合間での補間演算を行って上記計算された逆行列を完成させることとを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項19】
上記計算された逆行列は、インパルス信号行列の特異値分解の部分集合から導出される一対の行列を含み、上記方法は、上記行列に、上記受信信号のサンプルを含むベクトルを乗算するステップを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項20】
上記受信信号のサンプルの部分集合を選択して部分集合ベクトルを生成することと、上記一対の行列に上記部分集合ベクトルを乗算することとを含む請求項19記載の方法。
【請求項21】
上記インパルス信号の計算された逆行列を上記戻り信号へ適用する上記ステップの結果として生じる推定されたチャンネル応答に基づいて、位置ダイアグラムを構築することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項22】
同じ周波数帯からの個々の信号によって複数の送信機を駆動することと、複数の受信信号を受信機において分離することとを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項23】
楕円又は楕円面の交差を用いて複数の推定されたチャンネル応答を合成することを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項24】
上記インパルス信号と上記受信される応答信号を同じレートでサンプリングすることを含む、先行する請求項のうちのいずれか1つに記載の方法。
【請求項25】
チャンネル応答を推定するための装置であって、送信手段と、受信手段と、処理手段とを備え、上記処理手段は、上記送信手段により送信されたインパルス信号の計算された逆行列を上記受信手段により受信された信号へ適用するように構成される装置。
【請求項26】
送信手段と、受信手段と、処理手段とを備える追跡装置であって、上記処理手段は、上記送信手段によって送信されたインパルス信号の計算された逆行列を、上記受信手段によって受信された信号へ適用するように構成される追跡装置。
【請求項27】
環境をマッピングするためのマッピング装置であって、インパルス信号を上記環境へ送信する手段と、上記環境からの戻り信号を検出して、上記インパルス信号の計算された逆行列を上記戻り信号へ適用する手段とを備えるマッピング装置。
【請求項28】
上記送信手段は上記インパルス信号を連続して送信するように構成される請求項25、26又は27記載の装置。
【請求項29】
上記送信手段は上記インパルス信号を連続的又は継続的に送信するように構成される請求項28記載の装置。
【請求項30】
上記逆行列を計算する手段を備える、請求項25乃至29のうちのいずれか1つに記載の装置。
【請求項31】
上記計算された逆行列はリッジ逆行列を含む、請求項25乃至30のうちのいずれか1つに記載の装置。
【請求項32】
上記計算された逆行列はムーア・ペンローズの逆行列を含む、請求項25乃至30のうちのいずれか1つに記載の装置。
【請求項33】
音響インパルスを生成する手段を備える、請求項25乃至31のうちのいずれか1つに記載の装置。
【請求項34】
上記インパルスは超音波である請求項33記載の装置。
【請求項35】
上記インパルスの帯域幅の中心は20kHz乃至50kHzの間にある請求項28記載の装置。
【請求項36】
スライディングウィンドウを用いて上記受信信号をサンプリングする手段を備える、請求項25乃至35のうちのいずれか1つに記載の装置。
【請求項37】
上記インパルス信号を非反復符号から生成する手段を備える、請求項25乃至36のうちのいずれか1つに記載の装置。
【請求項38】
上記インパルス信号を、互いに線形独立な少なくともいくつかの個々の部分を有する符号から生成する手段を備える、請求項25乃至37のうちのいずれか1つに記載の装置。
【請求項39】
上記インパルス信号は白色ノイズを含む、請求項25乃至28のうちのいずれか1つに記載の装置。
【請求項40】
上記インパルス信号の送信より前に上記逆行列を計算するように構成される、請求項25乃至30のうちのいずれか1つに記載の装置。
【請求項41】
上記インパルス信号を、上記送信機及び受信機サブシステムの帯域幅の一部である帯域幅で生成する手段を備える、請求項25乃至39のうちのいずれか1つに記載の装置。
【請求項42】
上記逆行列の行及び/又は列の部分集合を計算すべく選択するように適応化されたセレクタ手段を備える、請求項25乃至41のうちのいずれか1つに記載の装置。
【請求項43】
上記計算された逆行列における行及び/又は列の上記部分集合間を補間する手段を備える請求項42記載の装置。
【請求項44】
上記計算された逆行列を、上記インパルス信号行列の特異値分解の部分集合から導出される一対の行列に分解する手段を備える、請求項25乃至43のうちのいずれか1つに記載の装置。
【請求項45】
上記受信信号のサンプルの部分集合を選択して部分集合ベクトルを生成し、上記一対の行列に上記部分集合ベクトルを乗算する手段を備える請求項44記載の装置。
【請求項46】
上記インパルス信号の計算された逆行列を上記戻り信号へ適用することから結果的に生じる推定されたチャンネル応答に基づいて、位置ダイアグラムを構築する手段を備える、請求項25乃至45のうちのいずれか1つに記載の装置。
【請求項47】
同じ周波数帯からの個々の信号によって駆動されるように構成される複数の送信機を備え、上記受信機は各受信信号を分離するように構成される、請求項25乃至46のうちのいずれか1つに記載の装置。
【請求項48】
楕円又は楕円面の交差を用いて複数の推定されたチャンネル応答を合成する手段を備える、請求項25乃至47のうちのいずれか1つに記載の装置。
【請求項49】
上記インパルス信号と上記受信される応答信号を同じレートでサンプリングする手段を備える、請求項25乃至48のうちのいずれか1つに記載の装置。
【請求項50】
実行される場合は、請求項1乃至24のうちのいずれか1つに記載の方法を実行するように適応化されたコンピュータソフトウェア製品。
【請求項51】
チャンネルのインパルス応答を推定するためのコンピュータソフトウェア製品であって、送信信号を表す行列の計算された逆行列を、受信される応答信号の複数のサンプルへ適用する手段を備えるコンピュータソフトウェア製品。
【請求項52】
環境をマッピングするためのコンピュータソフトウェア製品であって、上記環境へ送信されるインパルス信号の計算された逆行列を、上記環境からの戻り信号へ適用する手段と、これにより上記環境の表現を計算する手段とを備えるコンピュータソフトウェア製品。
【請求項53】
オブジェクトを追跡するためのコンピュータソフトウェア製品であって、上記オブジェクトへ向かって上記環境へと送信されるインパルス信号の計算された逆行列を、上記オブジェクトから反射される戻り信号へ適用する手段と、これにより上記オブジェクトのロケーションを計算する手段とを備えるコンピュータソフトウェア製品。
【請求項54】
請求項50乃至53のうちのいずれか1つに記載のコンピュータソフトウェア製品を担うキャリア。
【図1a】

【図1b】
【図1c】
【図1d】

【図1e】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図1b】
【図1c】
【図1d】
【図1e】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2008−524623(P2008−524623A)
【公表日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願番号】特願2007−547637(P2007−547637)
【出願日】平成17年12月21日(2005.12.21)
【国際出願番号】PCT/GB2005/004968
【国際公開番号】WO2006/067436
【国際公開日】平成18年6月29日(2006.6.29)
【出願人】(507208510)ウニヴェルシテテート・イ・オスロ (1)
【氏名又は名称原語表記】UNIVERSITETET I OSLO
【Fターム(参考)】
【公表日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願日】平成17年12月21日(2005.12.21)
【国際出願番号】PCT/GB2005/004968
【国際公開番号】WO2006/067436
【国際公開日】平成18年6月29日(2006.6.29)
【出願人】(507208510)ウニヴェルシテテート・イ・オスロ (1)
【氏名又は名称原語表記】UNIVERSITETET I OSLO
【Fターム(参考)】
[ Back to top ]