
チューナブルフィルタ
【課題】広い可変周波数範囲を実現できるチューナブルフィルタを提供すること。
【解決手段】固定の共振周波数frsを有する直列腕共振器と、固定の共振周波数frpを有する並列腕共振器と、前記直列腕共振器、及び前記並列腕共振器に接続されたバリアブルキャパシタとを備えるチューナブルフィルタが提供される。このチューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.0<frs/frp<1.1である。
【解決手段】固定の共振周波数frsを有する直列腕共振器と、固定の共振周波数frpを有する並列腕共振器と、前記直列腕共振器、及び前記並列腕共振器に接続されたバリアブルキャパシタとを備えるチューナブルフィルタが提供される。このチューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.0<frs/frp<1.1である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、チューナブルフィルタに関する。
【背景技術】
【0002】
近年、複数の通信規格又は通信モードに対応する移動体通信システムの開発が進められている。その移動体通信システムにおいて、搭載されるフィルタデバイスは複数の帯域に対応した複数のフィルタからなるフィルタバンクを備え、求められる周波数帯域毎に使用するフィルタを切替えるようになっている。例えば、欧州の第3世代移動体通信システムであるUMTS(Universal Mobile Telecommunications System)において利用されるDCS/RXモードの場合、移動体端末に搭載されるフィルタの通過帯域は、1805MHz〜1880MHzに設定される。同様に、PCS/RXモードの場合、フィルタの通過帯域は、1930MHz〜1990MHzに設定される。また、2.1GHz帯を用いるW−CDMA方式の場合、フィルタの通過帯域は、2110MHz〜2170MHzに設定される。しかしながら、フィルタバンクによるデバイスは、当然にデバイスサイズが大きくなることや、切換制御が複雑化するなどの問題点を有しているため、これらのモード/方式で要求される通過帯域の切り替えを実現するために、広い可変通過帯域を有するチューナブルフィルタが求められている。
【0003】
通過帯域が可変なフィルタに関し、例えば、下記の特許文献1には、ラダー型のバリアブルフィルタが記載されている。同文献に記載のバリアブルフィルタは、バリアブルキャパシタ、又はインダクタ素子の回路定数をモニタリングし、当該回路定数に関する情報に基づいてバリアブルキャパシタの容量を制御するフィードバック構成に特徴がある。つまり、フィードバックに基づいて容量制御することにより、通過帯域を可変している。
【0004】
【特許文献1】特開2005−217852号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、複数の通信規格に適応できる次世代無線通信(Multi−band Multi−mode、Software無線等)のRFフロントエンドに用いるフィルタには、通過帯域の広い可変範囲を実現するための工夫が必要である。そのため、広い帯域幅、急峻な遮断特性、広い周波数可変範囲を有するチューナブルフィルタの実現が切に求められている。
【0006】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、通過帯域の可変周波数範囲を広く維持することが可能な、新規かつ改良されたチューナブルフィルタを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある観点によれば、固定の共振周波数frsを有する直列腕共振器と、固定の共振周波数frpを有する並列腕共振器と、前記直列腕共振器、及び前記並列腕共振器に接続されたバリアブルキャパシタとを備えたチューナブルフィルタが提供される。特に、当該チューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.0<frs/frp<1.1であってもよい。
【0008】
また、前記チューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.025<frs/frp<1.1であってもよい。
【0009】
また、前記チューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.07<frs/frp<1.08であってもよい。
【0010】
また、前記チューナブルフィルタは、1の前記直列腕共振器、1の前記並列腕共振器、及び前記バリアブルキャパシタにより形成される基本区間が2以上接続されて複数段に形成されていてもよい。但し、各基本区間において、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが、1.0<frs/frp<1.1、1.025<frs/frp<1.1、或いは、1.07<frs/frp<1.08であってもよい。また、複数の基本区画の全てで、前記のいずれかの範囲に属する比frs/frpが共通に設定されていてもよいし、或いは、個々の基本区画毎に前記のいずれかの範囲に属する比frs/frpが設定されていてもよい。もちろん、複数の基本区画の一部のみが前記のいずれかの範囲に属する比frs/frpであってもよい。
【0011】
上記のように、直列腕共振器の固定された共振周波数frsと並列腕共振器の固定された共振周波数frpとの比率が上記のように設定されることで、所定の通過特性(低損失)を維持しつつ、広い可変周波数範囲を実現することができる。特に、上記の共振周波数比率の範囲は、この比率の上昇に伴う可変周波数範囲の減少が考慮されたものである。つまり、上限値を上記の通りに規定することで所定の通過特性を維持しつつ、広い可変周波数範囲の実現しているのである。例えば、上記技術は、複数の通信規格で規定される通信帯域をカバーすることが可能な移動体端末又は基地局に適用されうる。また、上記共振器の構成は、例えば、表面弾性波デバイスや弾性境界波デバイス等を利用して実現することも可能である。
【発明の効果】
【0012】
以上説明したように本発明によれば、通過帯域の広い可変周波数範囲を実現することが可能になる。
【発明を実施するための最良の形態】
【0013】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0014】
[梯子型フィルタの周波数特性]
まず、本発明に係る実施形態について説明するに先立ち、以下で説明する実施形態の技術的事項に関係する梯子型フィルタの周波数特性について簡単に説明する。
【0015】
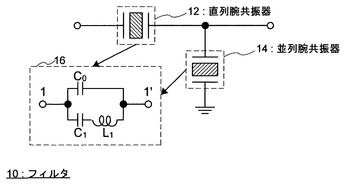
図1に梯子型のフィルタ10の回路構成を示す。図1に示すように、フィルタ10は、当該回路構成の中で直列腕、及び並列腕を成す複数の共振器(直列腕共振器12、並列腕共振器14)により構成される。また、直列腕共振器12、及び並列腕共振器14は、例えば、図1の符号16に示すように、並列接続された2つのキャパシタ(C0,C1)と、当該キャパシタの一方(C1)に直列接続されたインダクタ素子(L1)とにより形成される。尚、符号16の回路構成は、説明の都合上、非常に簡略化して表現されたものである。従って、実際には抵抗成分や他の成分を含んでいる点に注意されたい。また、以下の実施形態において説明される共振器の構成は、これに限定されるものではない。
【0016】
例えば、端子1から端子1’に周波数fのRF信号を印加し、その周波数fを増加させる場合を考える。RF信号の周波数fが増加すると、図1の符号16の回路構成で説明される共振器が共振状態となり、交流的に導通状態になる。以下の説明において、この共振周波数frを共振点と呼ぶ場合がある。さらに周波数fを増加させると、図1の符号16の回路構成で説明される共振器が反共振状態となり、高インピーダンスの状態になる。そのため、この共振周波数fa付近でRF信号の減衰極が形成される。以下の説明において、この共振周波数faを反共振点、又は反共振周波数と呼ぶ場合がある。
【0017】
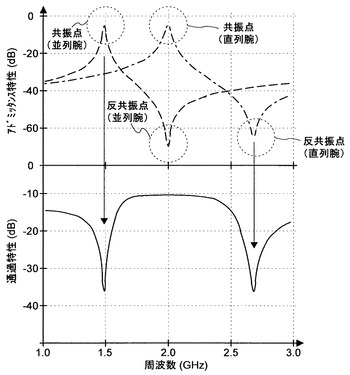
さらに、バンドパス特性を得るため、符号16の回路構成を直列腕、及び並列腕として図1に示したフィルタ10のような回路を組成する。この回路構成によると、図2に示すようなアドミッタンス特性、及び通過特性が得られる。但し、良好な通過特性や急峻な遮断特性を得るために直列腕共振器12の共振周波数(frs)と並列腕共振器14の反共振周波数(fap)とが一致するように設定されている。
【0018】
例えば、入力端子から印加されたRF信号の周波数fを上昇させる場合について考える。この周波数fが並列腕共振器14の共振周波数(frp)に到達すると、並列腕共振器14が共振状態となり、そのインピーダンスが0になる。すると、並列腕共振器14が短絡され、出力端子にRF信号が到達しなくなる。その結果、並列腕共振器14の共振周波数frpで低周波数側の減衰極が形成される。
【0019】
さらにRF信号の周波数を上昇させ、並列腕共振器14の反共振周波数fapに到達すると、並列腕共振器14が反共振状態となり、高インピーダンスの状態になる。また、直列腕共振器12の共振周波数frsと並列腕共振器14の反共振周波数fapとが一致しているため、直列腕共振器12が共振状態となって導通状態となる。さらにRF信号の周波数fを上昇させ、直列腕共振器12の反共振周波数(fas)に到達すると、直列腕共振器12が反共振状態となり、高インピーダンスの状態になる。そのため、出力端子に対するRF信号の伝達が阻止され、直列腕共振器12の反共振周波数fasで高周波数側の減衰極が形成される。
【0020】
以上説明した原理に基づき、図2に示すような通過特性が得られる。上記の説明を踏まえ、以下、本発明に係る実施形態について説明する。
【0021】
<第1実施形態>
まず、図3を参照しながら、本発明の第1実施形態に係るチューナブルフィルタ100の構成、及び可変周波数範囲の制御方法について説明する。図3は、本実施形態に係るチューナブルフィルタ100の構成を示す説明図である。
【0022】
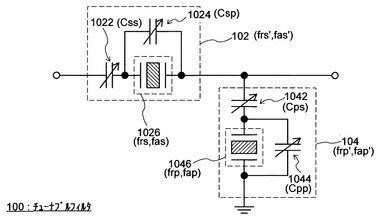
図3に示すように、チューナブルフィルタ100は、可変直列腕共振器102と、可変並列腕共振器104とにより構成される。また、可変直列腕共振器102は、バリアブルキャパシタ1022、1024と、共振器1026とにより構成される。さらに、可変並列腕共振器104は、バリアブルキャパシタ1042、1044と、共振器1046とにより構成される。尚、共振器1026は、直列腕共振器の一例である。また、共振器1046は、並列腕共振器の一例である。
【0023】
図3に示すように、バリアブルキャパシタ1022は、共振器1026に対して直列に接続されている。バリアブルキャパシタ1024は、共振器1026に対して並列に接続されている。また、バリアブルキャパシタ1042は、共振器1046に対して直列に接続されている。バリアブルキャパシタ1044は、共振器1046に対して並列に接続されている。尚、バリアブルキャパシタ1022、1024、1042、1044は、例えば、図示しない制御手段により容量が制御される。
【0024】
(可変直列腕共振器102)
可変直列腕共振器102は、チューナブルフィルタ100の直列腕を成し、可変の共振周波数frs’、及び可変の反共振周波数fas’を有する。可変直列腕共振器102を構成する共振器1026は、固定の共振周波数frs、及び固定の反共振周波数fasを有する。また、バリアブルキャパシタ1022、1024の容量をそれぞれCss、Cspと表記する。尚、共振器1026は、固定の共振周波数frs、及び固定の反共振周波数fasを有する共振器であれば足り、上記の符号16で示した構成に限定されない。
【0025】
尚、可変直列腕共振器102の共振周波数frs’は、バリアブルキャパシタ1022の容量Cssが増加するに連れて増加する。一方、可変直列腕共振器102の反共振周波数fas’は、バリアブルキャパシタ1024の容量Cspが増加するに連れて減少する。但し、共振器1026の共振周波数frs、及び反共振周波数fasはバリアブルキャパシタ1022、1024の容量変化に関わらず変化しない点に注意されたい。
【0026】
(可変並列腕共振器104)
可変並列腕共振器104は、チューナブルフィルタ100の並列腕を成し、可変の共振周波数frp’、及び可変の反共振周波数fap’を有する。可変並列腕共振器104を構成する共振器1046は、固定の共振周波数frp、及び固定の反共振周波数fapを有する。また、バリアブルキャパシタ1022、1024の容量をそれぞれCps、Cppと表記する。尚、共振器1046は、固定の共振周波数frp、及び固定の反共振周波数fapを有する共振器であれば足り、上記の符号16で示した構成に限定されない。
【0027】
尚、可変並列腕共振器104の共振周波数frp’は、バリアブルキャパシタ1042の容量Cpsが増加するに連れて増加する。一方、可変並列腕共振器104の反共振周波数fap’は、バリアブルキャパシタ1044の容量Cppが増加するに連れて減少する。但し、共振器1046の共振周波数frp、及び反共振周波数fapはバリアブルキャパシタ1042、1044の容量変化に関わらず変化しない点に注意されたい。
【0028】
(通過帯域特性について)
上記の通り、チューナブルフィルタ100は、可変直列腕共振器102、及び可変並列腕共振器104が有する共振特性を可変することができる。そこで、既に説明したフィルタ10の通過特性に関する知識を踏まえ、チューナブルフィルタ100の通過特性について説明する。
【0029】
チューナブルフィルタ100の通過帯域は、可変直列腕共振器102、及び可変並列腕共振器104の共振特性を可変することにより調整することが可能である。このとき、通過帯域は、可変並列腕共振器104の共振周波数frp’と、可変直列腕共振器102の反共振周波数fas’との間に形成される。但し、可変並列腕共振器104の反共振周波数fap’、及び可変直列腕共振器102の共振周波数frs’に通過特性(減衰量)が依存するため、共振器1026、1046の共振周波数frs,frp及び反共振周波数fas,fapの設定値が重要になる。以下、この点について説明する。
【0030】
まず、図4を参照しながら、チューナブルフィルタ100の通過特性について説明する。図4は、チューナブルフィルタ100のアドミッタンス特性、及び通過特性を示す説明図である。尚、周波数の減少方向をA方向、増加方向をB方向と表記する。また、図中の鎖線は、可変並列腕共振器104のアドミッタンス特性を表す。一点鎖線は、可変直列腕共振器102のアドミッタンス特性を表す。さらに、図中の実線は、チューナブルフィルタ100によるRF信号の通過特性を表す。
【0031】
図4には、Case1として、共振器1026の固定の共振周波数frsと、共振器1046の固定の共振周波数frpとが一致するように調整された場合(frs=frp)のアドミッタンス特性、及び通過特性が示されている。また、Case2として、可変直列腕共振器102の共振周波数frs’と、可変並列腕共振器104の反共振周波数fap’とが一致するように調整された場合(frs’=fap’)のアドミッタンス特性、及び通過特性が示されている。
【0032】
まず、Case1(frs=frp)に注目する。可変直列腕共振器102の共振周波数frs’は、バリアブルキャパシタ1022の容量Cssを増加させることにより、B方向にシフトさせることができる。同様に、バリアブルキャパシタ1042の容量Cpsを増加させることによって可変並列腕共振器104の共振周波数frp’もB方向にシフトさせることができる。また、バリアブルキャパシタ1024の容量Cspを減少させることによって可変直列腕共振器102の反共振周波数fas’をA方向にシフトさせることができる。同様に、バリアブルキャパシタ1044の容量Cppを減少させることによって可変並列腕共振器104の反共振周波数frs’をA方向にシフトさせることができる。
【0033】
そのため、Case1のように、共振器1046の固定の共振周波数frpと、共振器1026の固定の共振周波数frsとを一致させると、広い周波数範囲にわたって可変直列腕共振器102、及び可変並列腕共振器104の共振/反共振周波数を可変することができる。このことは、低損失のチューナブルフィルタを実現するためには、通過帯域の中心周波数付近で可変直列腕共振器102の共振周波数frs’と可変並列腕共振器104の反共振周波数fap’とを一致させる必要があるが、可変直列腕共振器102の共振周波数frs’、及び可変並列腕共振器104の反共振周波数fap’の可変周波数範囲が広く調整できることで、通過帯域の中心周波数の可変範囲を広く調整できることを示している。その一例として、図中のCase2は、共振周波数frs’と反共振周波数fap’とが一致するように調整した後の状態を示したものである。
【0034】
また、可変直列腕共振器102の反共振周波数fas’及び/又は可変並列腕共振器104の共振周波数frp’を調整することで、通過帯域の帯域幅を調整することができる。ここで、通過帯域とは通過時の損失が2dB以下の値をとる周波数帯域のことをいう。また、帯域幅とは、通過帯域の幅のことをいう。
【0035】
上記と比較するために再び図2に注目する。既に述べたように、図2は、固定の共振周波数及び反共振周波数がfrs=fapの状態を示したものである。これは従来より用いられている梯子型フィルタの一般的な設定である。図2のように、共振器1046の固定の反共振周波数fapと、共振器1026の固定の共振周波数frsとが一致している場合、可変直列腕共振器102の共振周波数frs’は周波数の大きくなる方向(図4のB方向に対応)にしかシフトできず、可変並列腕共振器104の反共振周波数fap’は周波数が小さくなる方向(図4のA方向に対応)にしかシフトできない。
【0036】
そのため、本実施形態のように通過帯域の中心周波数付近で可変直列腕共振器102の共振周波数frs’と可変並列腕共振器104の反共振周波数fap’とを一致させて調整することができない。尚、それぞれの共振周波数、反共振周波数を調整することで、通過スペクトルの中心周波数を調整することは可能かもしれないが、その通過損失は非常に大きなものとなる。つまり、低損失の通過帯域に関する実効的な可変周波数範囲が非常に限定されてしまうのである。
【0037】
このように、通過帯域の可変周波数範囲は、所定値以下の損失量が実現される実効的な可変周波数範囲でなければならない。そこで、共振器1026の共振周波数frs、及び共振器1046の共振周波数frpの関係に注目して更なる考察を進める。
【0038】
ところで、通過帯域の可変周波数範囲は、上記以外のパラメータにも依存する場合がある。例えば、通過帯域の可変周波数範囲は、共振器の結合係数K2を大きくすることで広げることができる。しかしながら、共振器の結合係数K2を大きくすると、遮断特性が劣化してしまう。また、結合係数K2が大きい共振器が非常に限定されているという問題もある。そこで、現実的な状況下で良好な特性が得られる条件について考察する。
【0039】
(固定の共振周波数比に対する依存性)
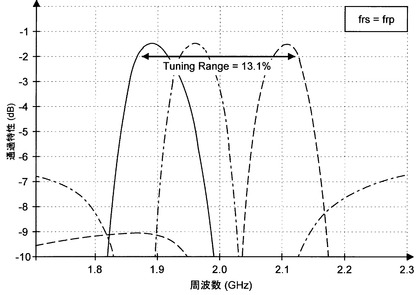
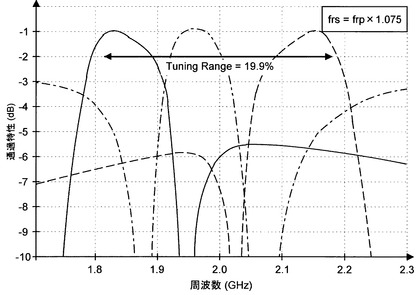
まず、図5及び図6を比較しながら、共振周波数比(frs/frp)に応じた通過帯域の可変周波数範囲の変化について述べる。図5は、直列腕共振器1026の共振周波数frsと並列腕共振器1046の共振周波数frpとが一致する場合(共振周波数比frs/frp=1.0の場合)の通過帯域の可変周波数範囲を示す説明図である。一方、図6は、共振周波数比が1.075の場合における通過帯域の可変周波数範囲を示す説明図である。
【0040】
図5の例(frs/frp=1.0)では、通過帯域の可変周波数範囲が約13.1%程度の幅を有している。一方、図6の例(frs/frp=1.075)では、通過帯域の可変周波数範囲が約19.9%程度の幅を有している。つまり、可変直列腕共振器102の反共振周波数fap’や可変並列腕共振器104の共振周波数frs’の可変周波数範囲を最大限広げる条件(図4:Case1を参照)よりも、その範囲をやや狭める方が実効的な可変周波数範囲を広げることができるという結果が得られたことになる。ここで、図中にTuning Rangeとして記載した可変周波数範囲とは、特定の規格化された帯域幅(以下、帯域幅BWと表記する。)で通過帯域を変化させた際に、最も低周波数側に位置する通過帯域の2dBにおける最低周波数と、最も高周波数側に位置する通過帯域の2dBにおける最高周波数との周波数差を2GHzで規格化したものである。また、上記の帯域幅BWとは、帯域幅を通過帯域の中心周波数で規格化したものである。
【0041】
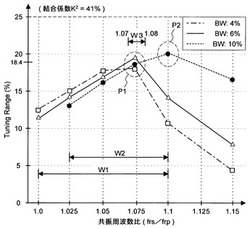
そこで、可変周波数範囲の共振周波数比(frs/frp)依存性について、より詳細な評価を行った。その結果を図7に示す。
【0042】
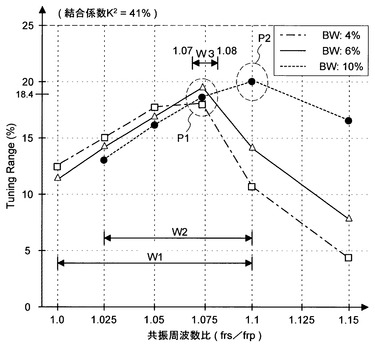
図7は、可変周波数範囲の共振周波数比(frs/frp)特性を示す説明図である。尚、帯域幅BWに対する依存性があるため、図7には、通常の帯域幅BW=6%の条件に加えて、帯域幅BW=4%、10%の条件に関する評価結果も示されている。また、図7の結果は、共振器の結合係数K2=41%の条件下で評価されたものである。
【0043】
図7を参照すると、所定の共振周波数比に至るまで、共振周波数比(frs/frp)が増加するにつれて可変周波数範囲が拡大していることが分かる。しかしながら、所定の共振周波数比を超えると、急速に可変周波数範囲が縮小することが分かる。
【0044】
例えば、帯域幅BW=6%の場合(実線)、共振周波数比(frs/frp)=1.075を超えたところ(P1)で可変周波数範囲が急速に縮小している。帯域幅BW=4%の場合(一点鎖線)も同様に、P1以降、急激に可変周波数範囲が縮小している。さらに、帯域幅BW=10%の場合(鎖線)、共振周波数比(frs/frp)=1.1を超えたところ(P2)で可変周波数範囲が縮小している。
【0045】
このように、帯域幅BWに依存するものの、少なくとも帯域幅BW=4%、6%、10%の場合に、所定の共振周波数比(frs/frp)を超えたところから、可変周波数範囲が縮小してしまうことが分かる。そのため、所望の実効的な可変周波数範囲を維持するためには、共振周波数比(frs/frp)を所定の範囲内に設定する必要がある。
【0046】
例えば、帯域幅BW=10%の場合、可変周波数範囲が増加する範囲W1に共振周波数比(frs/frp)を制限することが好ましい。また、この条件では、図中に示された全ての帯域幅BWについて、約10%以上の可変周波数範囲が維持されている。このとき、範囲W1は、1.0≦frs/frp≦1.1である。
【0047】
他の例として、実用的な帯域幅BW=6%を想定し、約13%以上の可変周波数範囲が維持できる範囲W2に共振周波数比(frs/frp)を制限することが好ましいと考えられる。このとき、範囲W2は、1.025≦frs/frp≦1.1である。また、共振周波数比(frs/frp)を1.05≦frs/frp≦1.08の範囲に設定すると、帯域幅4%〜10%の全ての条件で15%以上の可変周波数範囲が確保できるため、さらに好ましいと考えられる。
【0048】
また、既に述べたUMTSの3方式をカバーするためには、少なくとも18.4%程度の可変周波数範囲が要求される。この条件を満たすためには、例えば、実用的な帯域幅BW=6%を想定して、共振周波数比(frs/frp)を範囲W3の中に納まるように設定することが好ましい。尚、範囲W3は、1.07≦frs/frp≦1.08である。
【0049】
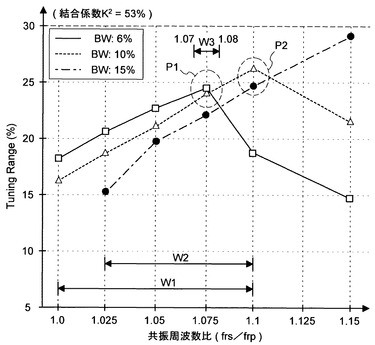
以上の評価結果は、共振器の結合係数K2=41%の条件下で得られたものである。上記の特性は、共振器の結合係数K2に若干依存する。そのため、結合係数K2=53%の条件下で評価した結果も示した(図8)。図8は、共振器の結合係数K2=53%の場合における可変周波数範囲の共振周波数比(frs/frp)特性である。
【0050】
図8を参照すると、共振器の結合係数K2が53%の場合であっても、各可変周波数範囲の共振周波数比(frs/frp)特性は図7の場合と同様の傾向を示しており、ある共振周波数比でピーク(P1、P2)が見られる場合がある。
【0051】
帯域幅BW=6%について範囲W1〜W3の特性を参照すると、共振器の結合係数K2=53%の場合、範囲W2に含まれるように共振周波数比が設定された条件下において、UMTSの3方式をカバーするために必要な18.4%程度の可変周波数範囲をほぼ超えていることが分かる。誤差を考慮しても、共振周波数比(frs/frp)を1.025≦frs/frp≦1.08の範囲に設定すれば、ほぼ確実に3方式をカバーすることが可能になる。
【0052】
既に述べた通り、共振器の結合係数K2が増加するにつれて可変周波数範囲が増加するため、上記のような結果が得られる。従って、結合係数K2=41%の条件下で好適な範囲W1〜W3を満たすように設定すれば、結合係数K2≧41%の条件下で可変周波数範囲に関する所望の特性が得られる。尚、上記のような結合係数を実現可能な共振器としては、例えば、KNbO3を用いた弾性境界波素子(特願2007−252925号)、公知の弾性表面波素子等が挙げられる。
【0053】
以上、本実施形態に係るチューナブルフィルタ100の回路構成、及び可変周波数範囲の制御方法について説明した。上記の特性は、図3に示した一区画の構成に関するものであり、これを多段接続した梯子型のチューナブルフィルタに構成を拡張してもよい。以下、第2実施形態として、当該拡張に係る技術について述べる。
【0054】
<第2実施形態>
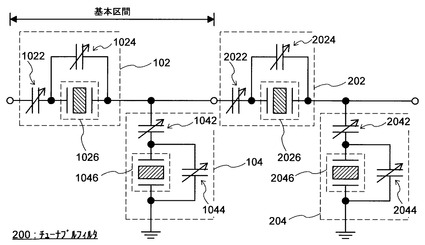
次に、図9を参照しながら、本発明の第2実施形態に係るチューナブルフィルタ200の構成、及び可変周波数範囲の制御方法について説明する。図9は、本実施形態に係るチューナブルフィルタ200の構成を示す説明図である。尚、本実施形態は、上記の第1実施形態に係るチューナブルフィルタ100を多段構成に拡張したものである。従って、実質的に同一の機能構成を有する構成要素については詳細な説明を省略する。
【0055】
図9に示すように、チューナブルフィルタ200は、可変直列腕共振器102、202と、可変並列腕共振器104、204とにより構成される。また、可変直列腕共振器102は、バリアブルキャパシタ1022、1024と、共振器1026とにより構成される。可変直列腕共振器202は、バリアブルキャパシタ2022、2024と、共振器2026とにより構成される。さらに、可変並列腕共振器104は、バリアブルキャパシタ1042、1044と、共振器1046とにより構成される。可変並列腕共振器204は、バリアブルキャパシタ2042、2044と、共振器2046とにより構成される。尚、共振器1026、2026は、直列腕共振器の一例である。また、共振器1046、2046は、並列腕共振器の一例である。さらに、1の可変直列腕共振器、及び1の可変並列腕共振器で構成される単位を基本区間と表現する。
【0056】
尚、上記の第1実施形態と同様の理由から、共振器1026が有する固定の共振周波数frs1と共振器1046が有する固定の共振周波数frp1との比frs1/frp1が、1.0<frs1/frp1<1.1、1.025<frs1/frp1<1.1、或いは、1.07<frs1/frp1<1.08であることが好ましい。さらに、共振器2026が有する固定の共振周波数frs2と共振器2046が有する固定の共振周波数frp2との比frs2/frp2が、1.0<frs2/frp2<1.1、1.025<frs2/frp2<1.1、或いは、1.07<frs2/frp2<1.08であることが好ましい。
【0057】
図9に示すように、バリアブルキャパシタ2022は、共振器2026に対して直列に接続されている。バリアブルキャパシタ2024は、共振器2026に対して並列に接続されている。また、バリアブルキャパシタ2042は、共振器2046に対して直列に接続されている。バリアブルキャパシタ2044は、共振器2046に対して並列に接続されている。尚、バリアブルキャパシタ1022、1024、1042、1044、2022、2024、2042、2044の容量は、図示しない制御手段により制御される。
【0058】
(チューナブルフィルタ200の周波数特性)
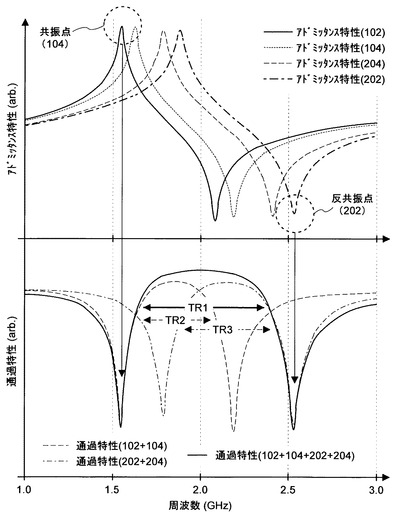
次に、図10を参照しながら、本実施形態に係るチューナブルフィルタ200の周波数特性について説明する。図10は、本実施形態に係るチューナブルフィルタ200の周波数特性を示す説明図である。
【0059】
基本的には、上記の第1実施形態と同様であるが、可変周波数範囲を決定する共振点、反共振点の位置が異なる。図9に示した構成の場合、共振器1046の固定の共振周波数frs(104)と共振器2026の固定の反共振周波数fap(202)との間が可変周波数範囲TR1となる。図10には、可変直列腕共振器102と可変並列腕共振器104とにより実現される可変周波数範囲TR2、及び、可変直列腕共振器202と可変並列腕共振器204とにより実現される可変周波数範囲TR3も示した。当然、これらの可変周波数範囲TR2、TR3に比べて多段構成の可変周波数範囲TR1の方が広い範囲となる。従って、上記の第1実施形態で示した範囲W1〜W3の条件を適用すれば、当然に所望の可変周波数範囲を確保することができるようになる。
【0060】
(変形例)
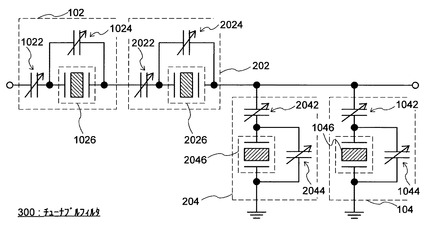
本実施形態に係るチューナブルフィルタ200を変形して、図11に示すチューナブルフィルタ300のような構成にすることも可能である。図11は、本実施形態の変形例に係るチューナブルフィルタ300の構成を示す説明図である。基本的な構成要素はチューナブルフィルタ200と実質的に同一であるが、可変直列腕共振器102、202、及び可変並列腕共振器104、204の並び順が変更されている。チューナブルフィルタ300のように、可変直列腕共振器102、202、及び可変並列腕共振器104、204の並び順が変更されていても、例えば、図10に示すような通過特性と実質的に同一の特性が得られるため、こうした変形例も本実施形態の技術的範囲に含まれる。当然、可変直列腕共振器102、202、及び可変並列腕共振器104、204の並び順を他の順序に変更しても実質的に同一であるし、基本区間を3段以上接続する変形例も本実施形態の技術的範囲に含まれる。
【0061】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は係る例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【図面の簡単な説明】
【0062】
【図1】梯子型チューナブルフィルタの構成を示す説明図である。
【図2】梯子型チューナブルフィルタの周波数特性を示す説明図である。
【図3】本発明の第1実施形態に係るチューナブルフィルタを示す説明図である。
【図4】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図5】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図6】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図7】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図8】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図9】本発明の第2実施形態に係るチューナブルフィルタを示す説明図である。
【図10】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図11】同実施形態の変形例に係るチューナブルフィルタを示す説明図である。
【符号の説明】
【0063】
100、200、300 チューナブルフィルタ
102、202 可変直列腕共振器
104、204 可変並列腕共振器
1022、1024、1042、1044、2022、2024、2042、2044 バリアブルキャパシタ
1026、1046、2026、2046 共振器
【技術分野】
【0001】
本発明は、チューナブルフィルタに関する。
【背景技術】
【0002】
近年、複数の通信規格又は通信モードに対応する移動体通信システムの開発が進められている。その移動体通信システムにおいて、搭載されるフィルタデバイスは複数の帯域に対応した複数のフィルタからなるフィルタバンクを備え、求められる周波数帯域毎に使用するフィルタを切替えるようになっている。例えば、欧州の第3世代移動体通信システムであるUMTS(Universal Mobile Telecommunications System)において利用されるDCS/RXモードの場合、移動体端末に搭載されるフィルタの通過帯域は、1805MHz〜1880MHzに設定される。同様に、PCS/RXモードの場合、フィルタの通過帯域は、1930MHz〜1990MHzに設定される。また、2.1GHz帯を用いるW−CDMA方式の場合、フィルタの通過帯域は、2110MHz〜2170MHzに設定される。しかしながら、フィルタバンクによるデバイスは、当然にデバイスサイズが大きくなることや、切換制御が複雑化するなどの問題点を有しているため、これらのモード/方式で要求される通過帯域の切り替えを実現するために、広い可変通過帯域を有するチューナブルフィルタが求められている。
【0003】
通過帯域が可変なフィルタに関し、例えば、下記の特許文献1には、ラダー型のバリアブルフィルタが記載されている。同文献に記載のバリアブルフィルタは、バリアブルキャパシタ、又はインダクタ素子の回路定数をモニタリングし、当該回路定数に関する情報に基づいてバリアブルキャパシタの容量を制御するフィードバック構成に特徴がある。つまり、フィードバックに基づいて容量制御することにより、通過帯域を可変している。
【0004】
【特許文献1】特開2005−217852号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、複数の通信規格に適応できる次世代無線通信(Multi−band Multi−mode、Software無線等)のRFフロントエンドに用いるフィルタには、通過帯域の広い可変範囲を実現するための工夫が必要である。そのため、広い帯域幅、急峻な遮断特性、広い周波数可変範囲を有するチューナブルフィルタの実現が切に求められている。
【0006】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、通過帯域の可変周波数範囲を広く維持することが可能な、新規かつ改良されたチューナブルフィルタを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある観点によれば、固定の共振周波数frsを有する直列腕共振器と、固定の共振周波数frpを有する並列腕共振器と、前記直列腕共振器、及び前記並列腕共振器に接続されたバリアブルキャパシタとを備えたチューナブルフィルタが提供される。特に、当該チューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.0<frs/frp<1.1であってもよい。
【0008】
また、前記チューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.025<frs/frp<1.1であってもよい。
【0009】
また、前記チューナブルフィルタは、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.07<frs/frp<1.08であってもよい。
【0010】
また、前記チューナブルフィルタは、1の前記直列腕共振器、1の前記並列腕共振器、及び前記バリアブルキャパシタにより形成される基本区間が2以上接続されて複数段に形成されていてもよい。但し、各基本区間において、前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが、1.0<frs/frp<1.1、1.025<frs/frp<1.1、或いは、1.07<frs/frp<1.08であってもよい。また、複数の基本区画の全てで、前記のいずれかの範囲に属する比frs/frpが共通に設定されていてもよいし、或いは、個々の基本区画毎に前記のいずれかの範囲に属する比frs/frpが設定されていてもよい。もちろん、複数の基本区画の一部のみが前記のいずれかの範囲に属する比frs/frpであってもよい。
【0011】
上記のように、直列腕共振器の固定された共振周波数frsと並列腕共振器の固定された共振周波数frpとの比率が上記のように設定されることで、所定の通過特性(低損失)を維持しつつ、広い可変周波数範囲を実現することができる。特に、上記の共振周波数比率の範囲は、この比率の上昇に伴う可変周波数範囲の減少が考慮されたものである。つまり、上限値を上記の通りに規定することで所定の通過特性を維持しつつ、広い可変周波数範囲の実現しているのである。例えば、上記技術は、複数の通信規格で規定される通信帯域をカバーすることが可能な移動体端末又は基地局に適用されうる。また、上記共振器の構成は、例えば、表面弾性波デバイスや弾性境界波デバイス等を利用して実現することも可能である。
【発明の効果】
【0012】
以上説明したように本発明によれば、通過帯域の広い可変周波数範囲を実現することが可能になる。
【発明を実施するための最良の形態】
【0013】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0014】
[梯子型フィルタの周波数特性]
まず、本発明に係る実施形態について説明するに先立ち、以下で説明する実施形態の技術的事項に関係する梯子型フィルタの周波数特性について簡単に説明する。
【0015】
図1に梯子型のフィルタ10の回路構成を示す。図1に示すように、フィルタ10は、当該回路構成の中で直列腕、及び並列腕を成す複数の共振器(直列腕共振器12、並列腕共振器14)により構成される。また、直列腕共振器12、及び並列腕共振器14は、例えば、図1の符号16に示すように、並列接続された2つのキャパシタ(C0,C1)と、当該キャパシタの一方(C1)に直列接続されたインダクタ素子(L1)とにより形成される。尚、符号16の回路構成は、説明の都合上、非常に簡略化して表現されたものである。従って、実際には抵抗成分や他の成分を含んでいる点に注意されたい。また、以下の実施形態において説明される共振器の構成は、これに限定されるものではない。
【0016】
例えば、端子1から端子1’に周波数fのRF信号を印加し、その周波数fを増加させる場合を考える。RF信号の周波数fが増加すると、図1の符号16の回路構成で説明される共振器が共振状態となり、交流的に導通状態になる。以下の説明において、この共振周波数frを共振点と呼ぶ場合がある。さらに周波数fを増加させると、図1の符号16の回路構成で説明される共振器が反共振状態となり、高インピーダンスの状態になる。そのため、この共振周波数fa付近でRF信号の減衰極が形成される。以下の説明において、この共振周波数faを反共振点、又は反共振周波数と呼ぶ場合がある。
【0017】
さらに、バンドパス特性を得るため、符号16の回路構成を直列腕、及び並列腕として図1に示したフィルタ10のような回路を組成する。この回路構成によると、図2に示すようなアドミッタンス特性、及び通過特性が得られる。但し、良好な通過特性や急峻な遮断特性を得るために直列腕共振器12の共振周波数(frs)と並列腕共振器14の反共振周波数(fap)とが一致するように設定されている。
【0018】
例えば、入力端子から印加されたRF信号の周波数fを上昇させる場合について考える。この周波数fが並列腕共振器14の共振周波数(frp)に到達すると、並列腕共振器14が共振状態となり、そのインピーダンスが0になる。すると、並列腕共振器14が短絡され、出力端子にRF信号が到達しなくなる。その結果、並列腕共振器14の共振周波数frpで低周波数側の減衰極が形成される。
【0019】
さらにRF信号の周波数を上昇させ、並列腕共振器14の反共振周波数fapに到達すると、並列腕共振器14が反共振状態となり、高インピーダンスの状態になる。また、直列腕共振器12の共振周波数frsと並列腕共振器14の反共振周波数fapとが一致しているため、直列腕共振器12が共振状態となって導通状態となる。さらにRF信号の周波数fを上昇させ、直列腕共振器12の反共振周波数(fas)に到達すると、直列腕共振器12が反共振状態となり、高インピーダンスの状態になる。そのため、出力端子に対するRF信号の伝達が阻止され、直列腕共振器12の反共振周波数fasで高周波数側の減衰極が形成される。
【0020】
以上説明した原理に基づき、図2に示すような通過特性が得られる。上記の説明を踏まえ、以下、本発明に係る実施形態について説明する。
【0021】
<第1実施形態>
まず、図3を参照しながら、本発明の第1実施形態に係るチューナブルフィルタ100の構成、及び可変周波数範囲の制御方法について説明する。図3は、本実施形態に係るチューナブルフィルタ100の構成を示す説明図である。
【0022】
図3に示すように、チューナブルフィルタ100は、可変直列腕共振器102と、可変並列腕共振器104とにより構成される。また、可変直列腕共振器102は、バリアブルキャパシタ1022、1024と、共振器1026とにより構成される。さらに、可変並列腕共振器104は、バリアブルキャパシタ1042、1044と、共振器1046とにより構成される。尚、共振器1026は、直列腕共振器の一例である。また、共振器1046は、並列腕共振器の一例である。
【0023】
図3に示すように、バリアブルキャパシタ1022は、共振器1026に対して直列に接続されている。バリアブルキャパシタ1024は、共振器1026に対して並列に接続されている。また、バリアブルキャパシタ1042は、共振器1046に対して直列に接続されている。バリアブルキャパシタ1044は、共振器1046に対して並列に接続されている。尚、バリアブルキャパシタ1022、1024、1042、1044は、例えば、図示しない制御手段により容量が制御される。
【0024】
(可変直列腕共振器102)
可変直列腕共振器102は、チューナブルフィルタ100の直列腕を成し、可変の共振周波数frs’、及び可変の反共振周波数fas’を有する。可変直列腕共振器102を構成する共振器1026は、固定の共振周波数frs、及び固定の反共振周波数fasを有する。また、バリアブルキャパシタ1022、1024の容量をそれぞれCss、Cspと表記する。尚、共振器1026は、固定の共振周波数frs、及び固定の反共振周波数fasを有する共振器であれば足り、上記の符号16で示した構成に限定されない。
【0025】
尚、可変直列腕共振器102の共振周波数frs’は、バリアブルキャパシタ1022の容量Cssが増加するに連れて増加する。一方、可変直列腕共振器102の反共振周波数fas’は、バリアブルキャパシタ1024の容量Cspが増加するに連れて減少する。但し、共振器1026の共振周波数frs、及び反共振周波数fasはバリアブルキャパシタ1022、1024の容量変化に関わらず変化しない点に注意されたい。
【0026】
(可変並列腕共振器104)
可変並列腕共振器104は、チューナブルフィルタ100の並列腕を成し、可変の共振周波数frp’、及び可変の反共振周波数fap’を有する。可変並列腕共振器104を構成する共振器1046は、固定の共振周波数frp、及び固定の反共振周波数fapを有する。また、バリアブルキャパシタ1022、1024の容量をそれぞれCps、Cppと表記する。尚、共振器1046は、固定の共振周波数frp、及び固定の反共振周波数fapを有する共振器であれば足り、上記の符号16で示した構成に限定されない。
【0027】
尚、可変並列腕共振器104の共振周波数frp’は、バリアブルキャパシタ1042の容量Cpsが増加するに連れて増加する。一方、可変並列腕共振器104の反共振周波数fap’は、バリアブルキャパシタ1044の容量Cppが増加するに連れて減少する。但し、共振器1046の共振周波数frp、及び反共振周波数fapはバリアブルキャパシタ1042、1044の容量変化に関わらず変化しない点に注意されたい。
【0028】
(通過帯域特性について)
上記の通り、チューナブルフィルタ100は、可変直列腕共振器102、及び可変並列腕共振器104が有する共振特性を可変することができる。そこで、既に説明したフィルタ10の通過特性に関する知識を踏まえ、チューナブルフィルタ100の通過特性について説明する。
【0029】
チューナブルフィルタ100の通過帯域は、可変直列腕共振器102、及び可変並列腕共振器104の共振特性を可変することにより調整することが可能である。このとき、通過帯域は、可変並列腕共振器104の共振周波数frp’と、可変直列腕共振器102の反共振周波数fas’との間に形成される。但し、可変並列腕共振器104の反共振周波数fap’、及び可変直列腕共振器102の共振周波数frs’に通過特性(減衰量)が依存するため、共振器1026、1046の共振周波数frs,frp及び反共振周波数fas,fapの設定値が重要になる。以下、この点について説明する。
【0030】
まず、図4を参照しながら、チューナブルフィルタ100の通過特性について説明する。図4は、チューナブルフィルタ100のアドミッタンス特性、及び通過特性を示す説明図である。尚、周波数の減少方向をA方向、増加方向をB方向と表記する。また、図中の鎖線は、可変並列腕共振器104のアドミッタンス特性を表す。一点鎖線は、可変直列腕共振器102のアドミッタンス特性を表す。さらに、図中の実線は、チューナブルフィルタ100によるRF信号の通過特性を表す。
【0031】
図4には、Case1として、共振器1026の固定の共振周波数frsと、共振器1046の固定の共振周波数frpとが一致するように調整された場合(frs=frp)のアドミッタンス特性、及び通過特性が示されている。また、Case2として、可変直列腕共振器102の共振周波数frs’と、可変並列腕共振器104の反共振周波数fap’とが一致するように調整された場合(frs’=fap’)のアドミッタンス特性、及び通過特性が示されている。
【0032】
まず、Case1(frs=frp)に注目する。可変直列腕共振器102の共振周波数frs’は、バリアブルキャパシタ1022の容量Cssを増加させることにより、B方向にシフトさせることができる。同様に、バリアブルキャパシタ1042の容量Cpsを増加させることによって可変並列腕共振器104の共振周波数frp’もB方向にシフトさせることができる。また、バリアブルキャパシタ1024の容量Cspを減少させることによって可変直列腕共振器102の反共振周波数fas’をA方向にシフトさせることができる。同様に、バリアブルキャパシタ1044の容量Cppを減少させることによって可変並列腕共振器104の反共振周波数frs’をA方向にシフトさせることができる。
【0033】
そのため、Case1のように、共振器1046の固定の共振周波数frpと、共振器1026の固定の共振周波数frsとを一致させると、広い周波数範囲にわたって可変直列腕共振器102、及び可変並列腕共振器104の共振/反共振周波数を可変することができる。このことは、低損失のチューナブルフィルタを実現するためには、通過帯域の中心周波数付近で可変直列腕共振器102の共振周波数frs’と可変並列腕共振器104の反共振周波数fap’とを一致させる必要があるが、可変直列腕共振器102の共振周波数frs’、及び可変並列腕共振器104の反共振周波数fap’の可変周波数範囲が広く調整できることで、通過帯域の中心周波数の可変範囲を広く調整できることを示している。その一例として、図中のCase2は、共振周波数frs’と反共振周波数fap’とが一致するように調整した後の状態を示したものである。
【0034】
また、可変直列腕共振器102の反共振周波数fas’及び/又は可変並列腕共振器104の共振周波数frp’を調整することで、通過帯域の帯域幅を調整することができる。ここで、通過帯域とは通過時の損失が2dB以下の値をとる周波数帯域のことをいう。また、帯域幅とは、通過帯域の幅のことをいう。
【0035】
上記と比較するために再び図2に注目する。既に述べたように、図2は、固定の共振周波数及び反共振周波数がfrs=fapの状態を示したものである。これは従来より用いられている梯子型フィルタの一般的な設定である。図2のように、共振器1046の固定の反共振周波数fapと、共振器1026の固定の共振周波数frsとが一致している場合、可変直列腕共振器102の共振周波数frs’は周波数の大きくなる方向(図4のB方向に対応)にしかシフトできず、可変並列腕共振器104の反共振周波数fap’は周波数が小さくなる方向(図4のA方向に対応)にしかシフトできない。
【0036】
そのため、本実施形態のように通過帯域の中心周波数付近で可変直列腕共振器102の共振周波数frs’と可変並列腕共振器104の反共振周波数fap’とを一致させて調整することができない。尚、それぞれの共振周波数、反共振周波数を調整することで、通過スペクトルの中心周波数を調整することは可能かもしれないが、その通過損失は非常に大きなものとなる。つまり、低損失の通過帯域に関する実効的な可変周波数範囲が非常に限定されてしまうのである。
【0037】
このように、通過帯域の可変周波数範囲は、所定値以下の損失量が実現される実効的な可変周波数範囲でなければならない。そこで、共振器1026の共振周波数frs、及び共振器1046の共振周波数frpの関係に注目して更なる考察を進める。
【0038】
ところで、通過帯域の可変周波数範囲は、上記以外のパラメータにも依存する場合がある。例えば、通過帯域の可変周波数範囲は、共振器の結合係数K2を大きくすることで広げることができる。しかしながら、共振器の結合係数K2を大きくすると、遮断特性が劣化してしまう。また、結合係数K2が大きい共振器が非常に限定されているという問題もある。そこで、現実的な状況下で良好な特性が得られる条件について考察する。
【0039】
(固定の共振周波数比に対する依存性)
まず、図5及び図6を比較しながら、共振周波数比(frs/frp)に応じた通過帯域の可変周波数範囲の変化について述べる。図5は、直列腕共振器1026の共振周波数frsと並列腕共振器1046の共振周波数frpとが一致する場合(共振周波数比frs/frp=1.0の場合)の通過帯域の可変周波数範囲を示す説明図である。一方、図6は、共振周波数比が1.075の場合における通過帯域の可変周波数範囲を示す説明図である。
【0040】
図5の例(frs/frp=1.0)では、通過帯域の可変周波数範囲が約13.1%程度の幅を有している。一方、図6の例(frs/frp=1.075)では、通過帯域の可変周波数範囲が約19.9%程度の幅を有している。つまり、可変直列腕共振器102の反共振周波数fap’や可変並列腕共振器104の共振周波数frs’の可変周波数範囲を最大限広げる条件(図4:Case1を参照)よりも、その範囲をやや狭める方が実効的な可変周波数範囲を広げることができるという結果が得られたことになる。ここで、図中にTuning Rangeとして記載した可変周波数範囲とは、特定の規格化された帯域幅(以下、帯域幅BWと表記する。)で通過帯域を変化させた際に、最も低周波数側に位置する通過帯域の2dBにおける最低周波数と、最も高周波数側に位置する通過帯域の2dBにおける最高周波数との周波数差を2GHzで規格化したものである。また、上記の帯域幅BWとは、帯域幅を通過帯域の中心周波数で規格化したものである。
【0041】
そこで、可変周波数範囲の共振周波数比(frs/frp)依存性について、より詳細な評価を行った。その結果を図7に示す。
【0042】
図7は、可変周波数範囲の共振周波数比(frs/frp)特性を示す説明図である。尚、帯域幅BWに対する依存性があるため、図7には、通常の帯域幅BW=6%の条件に加えて、帯域幅BW=4%、10%の条件に関する評価結果も示されている。また、図7の結果は、共振器の結合係数K2=41%の条件下で評価されたものである。
【0043】
図7を参照すると、所定の共振周波数比に至るまで、共振周波数比(frs/frp)が増加するにつれて可変周波数範囲が拡大していることが分かる。しかしながら、所定の共振周波数比を超えると、急速に可変周波数範囲が縮小することが分かる。
【0044】
例えば、帯域幅BW=6%の場合(実線)、共振周波数比(frs/frp)=1.075を超えたところ(P1)で可変周波数範囲が急速に縮小している。帯域幅BW=4%の場合(一点鎖線)も同様に、P1以降、急激に可変周波数範囲が縮小している。さらに、帯域幅BW=10%の場合(鎖線)、共振周波数比(frs/frp)=1.1を超えたところ(P2)で可変周波数範囲が縮小している。
【0045】
このように、帯域幅BWに依存するものの、少なくとも帯域幅BW=4%、6%、10%の場合に、所定の共振周波数比(frs/frp)を超えたところから、可変周波数範囲が縮小してしまうことが分かる。そのため、所望の実効的な可変周波数範囲を維持するためには、共振周波数比(frs/frp)を所定の範囲内に設定する必要がある。
【0046】
例えば、帯域幅BW=10%の場合、可変周波数範囲が増加する範囲W1に共振周波数比(frs/frp)を制限することが好ましい。また、この条件では、図中に示された全ての帯域幅BWについて、約10%以上の可変周波数範囲が維持されている。このとき、範囲W1は、1.0≦frs/frp≦1.1である。
【0047】
他の例として、実用的な帯域幅BW=6%を想定し、約13%以上の可変周波数範囲が維持できる範囲W2に共振周波数比(frs/frp)を制限することが好ましいと考えられる。このとき、範囲W2は、1.025≦frs/frp≦1.1である。また、共振周波数比(frs/frp)を1.05≦frs/frp≦1.08の範囲に設定すると、帯域幅4%〜10%の全ての条件で15%以上の可変周波数範囲が確保できるため、さらに好ましいと考えられる。
【0048】
また、既に述べたUMTSの3方式をカバーするためには、少なくとも18.4%程度の可変周波数範囲が要求される。この条件を満たすためには、例えば、実用的な帯域幅BW=6%を想定して、共振周波数比(frs/frp)を範囲W3の中に納まるように設定することが好ましい。尚、範囲W3は、1.07≦frs/frp≦1.08である。
【0049】
以上の評価結果は、共振器の結合係数K2=41%の条件下で得られたものである。上記の特性は、共振器の結合係数K2に若干依存する。そのため、結合係数K2=53%の条件下で評価した結果も示した(図8)。図8は、共振器の結合係数K2=53%の場合における可変周波数範囲の共振周波数比(frs/frp)特性である。
【0050】
図8を参照すると、共振器の結合係数K2が53%の場合であっても、各可変周波数範囲の共振周波数比(frs/frp)特性は図7の場合と同様の傾向を示しており、ある共振周波数比でピーク(P1、P2)が見られる場合がある。
【0051】
帯域幅BW=6%について範囲W1〜W3の特性を参照すると、共振器の結合係数K2=53%の場合、範囲W2に含まれるように共振周波数比が設定された条件下において、UMTSの3方式をカバーするために必要な18.4%程度の可変周波数範囲をほぼ超えていることが分かる。誤差を考慮しても、共振周波数比(frs/frp)を1.025≦frs/frp≦1.08の範囲に設定すれば、ほぼ確実に3方式をカバーすることが可能になる。
【0052】
既に述べた通り、共振器の結合係数K2が増加するにつれて可変周波数範囲が増加するため、上記のような結果が得られる。従って、結合係数K2=41%の条件下で好適な範囲W1〜W3を満たすように設定すれば、結合係数K2≧41%の条件下で可変周波数範囲に関する所望の特性が得られる。尚、上記のような結合係数を実現可能な共振器としては、例えば、KNbO3を用いた弾性境界波素子(特願2007−252925号)、公知の弾性表面波素子等が挙げられる。
【0053】
以上、本実施形態に係るチューナブルフィルタ100の回路構成、及び可変周波数範囲の制御方法について説明した。上記の特性は、図3に示した一区画の構成に関するものであり、これを多段接続した梯子型のチューナブルフィルタに構成を拡張してもよい。以下、第2実施形態として、当該拡張に係る技術について述べる。
【0054】
<第2実施形態>
次に、図9を参照しながら、本発明の第2実施形態に係るチューナブルフィルタ200の構成、及び可変周波数範囲の制御方法について説明する。図9は、本実施形態に係るチューナブルフィルタ200の構成を示す説明図である。尚、本実施形態は、上記の第1実施形態に係るチューナブルフィルタ100を多段構成に拡張したものである。従って、実質的に同一の機能構成を有する構成要素については詳細な説明を省略する。
【0055】
図9に示すように、チューナブルフィルタ200は、可変直列腕共振器102、202と、可変並列腕共振器104、204とにより構成される。また、可変直列腕共振器102は、バリアブルキャパシタ1022、1024と、共振器1026とにより構成される。可変直列腕共振器202は、バリアブルキャパシタ2022、2024と、共振器2026とにより構成される。さらに、可変並列腕共振器104は、バリアブルキャパシタ1042、1044と、共振器1046とにより構成される。可変並列腕共振器204は、バリアブルキャパシタ2042、2044と、共振器2046とにより構成される。尚、共振器1026、2026は、直列腕共振器の一例である。また、共振器1046、2046は、並列腕共振器の一例である。さらに、1の可変直列腕共振器、及び1の可変並列腕共振器で構成される単位を基本区間と表現する。
【0056】
尚、上記の第1実施形態と同様の理由から、共振器1026が有する固定の共振周波数frs1と共振器1046が有する固定の共振周波数frp1との比frs1/frp1が、1.0<frs1/frp1<1.1、1.025<frs1/frp1<1.1、或いは、1.07<frs1/frp1<1.08であることが好ましい。さらに、共振器2026が有する固定の共振周波数frs2と共振器2046が有する固定の共振周波数frp2との比frs2/frp2が、1.0<frs2/frp2<1.1、1.025<frs2/frp2<1.1、或いは、1.07<frs2/frp2<1.08であることが好ましい。
【0057】
図9に示すように、バリアブルキャパシタ2022は、共振器2026に対して直列に接続されている。バリアブルキャパシタ2024は、共振器2026に対して並列に接続されている。また、バリアブルキャパシタ2042は、共振器2046に対して直列に接続されている。バリアブルキャパシタ2044は、共振器2046に対して並列に接続されている。尚、バリアブルキャパシタ1022、1024、1042、1044、2022、2024、2042、2044の容量は、図示しない制御手段により制御される。
【0058】
(チューナブルフィルタ200の周波数特性)
次に、図10を参照しながら、本実施形態に係るチューナブルフィルタ200の周波数特性について説明する。図10は、本実施形態に係るチューナブルフィルタ200の周波数特性を示す説明図である。
【0059】
基本的には、上記の第1実施形態と同様であるが、可変周波数範囲を決定する共振点、反共振点の位置が異なる。図9に示した構成の場合、共振器1046の固定の共振周波数frs(104)と共振器2026の固定の反共振周波数fap(202)との間が可変周波数範囲TR1となる。図10には、可変直列腕共振器102と可変並列腕共振器104とにより実現される可変周波数範囲TR2、及び、可変直列腕共振器202と可変並列腕共振器204とにより実現される可変周波数範囲TR3も示した。当然、これらの可変周波数範囲TR2、TR3に比べて多段構成の可変周波数範囲TR1の方が広い範囲となる。従って、上記の第1実施形態で示した範囲W1〜W3の条件を適用すれば、当然に所望の可変周波数範囲を確保することができるようになる。
【0060】
(変形例)
本実施形態に係るチューナブルフィルタ200を変形して、図11に示すチューナブルフィルタ300のような構成にすることも可能である。図11は、本実施形態の変形例に係るチューナブルフィルタ300の構成を示す説明図である。基本的な構成要素はチューナブルフィルタ200と実質的に同一であるが、可変直列腕共振器102、202、及び可変並列腕共振器104、204の並び順が変更されている。チューナブルフィルタ300のように、可変直列腕共振器102、202、及び可変並列腕共振器104、204の並び順が変更されていても、例えば、図10に示すような通過特性と実質的に同一の特性が得られるため、こうした変形例も本実施形態の技術的範囲に含まれる。当然、可変直列腕共振器102、202、及び可変並列腕共振器104、204の並び順を他の順序に変更しても実質的に同一であるし、基本区間を3段以上接続する変形例も本実施形態の技術的範囲に含まれる。
【0061】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は係る例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【図面の簡単な説明】
【0062】
【図1】梯子型チューナブルフィルタの構成を示す説明図である。
【図2】梯子型チューナブルフィルタの周波数特性を示す説明図である。
【図3】本発明の第1実施形態に係るチューナブルフィルタを示す説明図である。
【図4】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図5】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図6】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図7】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図8】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図9】本発明の第2実施形態に係るチューナブルフィルタを示す説明図である。
【図10】同実施形態に係るチューナブルフィルタの周波数特性を示す説明図である。
【図11】同実施形態の変形例に係るチューナブルフィルタを示す説明図である。
【符号の説明】
【0063】
100、200、300 チューナブルフィルタ
102、202 可変直列腕共振器
104、204 可変並列腕共振器
1022、1024、1042、1044、2022、2024、2042、2044 バリアブルキャパシタ
1026、1046、2026、2046 共振器
【特許請求の範囲】
【請求項1】
固定の共振周波数frsを有する直列腕共振器と、
固定の共振周波数frpを有する並列腕共振器と、
前記直列腕共振器、及び前記並列腕共振器に接続されたバリアブルキャパシタと、
を備え、
前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.0<frs/frp<1.1であることを特徴とする、チューナブルフィルタ。
【請求項2】
前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.025<frs/frp<1.1であることを特徴とする、請求項1に記載のチューナブルフィルタ。
【請求項3】
前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.07<frs/frp<1.08であることを特徴とする、請求項2に記載のチューナブルフィルタ。
【請求項4】
1の前記直列腕共振器、1の前記並列腕共振器、及び前記バリアブルキャパシタにより形成される基本区間が2以上接続されて複数段に形成されることを特徴とする、請求項1〜3のいずれかに記載のチューナブルフィルタ。
【請求項1】
固定の共振周波数frsを有する直列腕共振器と、
固定の共振周波数frpを有する並列腕共振器と、
前記直列腕共振器、及び前記並列腕共振器に接続されたバリアブルキャパシタと、
を備え、
前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.0<frs/frp<1.1であることを特徴とする、チューナブルフィルタ。
【請求項2】
前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.025<frs/frp<1.1であることを特徴とする、請求項1に記載のチューナブルフィルタ。
【請求項3】
前記直列腕共振器が有する固定の共振周波数frsと前記並列腕共振器が有する固定の共振周波数frpとの比frs/frpが1.07<frs/frp<1.08であることを特徴とする、請求項2に記載のチューナブルフィルタ。
【請求項4】
1の前記直列腕共振器、1の前記並列腕共振器、及び前記バリアブルキャパシタにより形成される基本区間が2以上接続されて複数段に形成されることを特徴とする、請求項1〜3のいずれかに記載のチューナブルフィルタ。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−130831(P2009−130831A)
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願番号】特願2007−306114(P2007−306114)
【出願日】平成19年11月27日(2007.11.27)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】SAMSUNG ELECTRONICS CO.,LTD.
【住所又は居所原語表記】416,Maetan−dong,Yeongtong−gu,Suwon−si,Gyeonggi−do 442−742(KR)
【Fターム(参考)】
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願日】平成19年11月27日(2007.11.27)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】SAMSUNG ELECTRONICS CO.,LTD.
【住所又は居所原語表記】416,Maetan−dong,Yeongtong−gu,Suwon−si,Gyeonggi−do 442−742(KR)
【Fターム(参考)】
[ Back to top ]