
チルトステージ装置及びステージ調整方法

【課題】単純な構造で安価に製造できるチルトステージにより試料片等比較的小さな対象物を観察する際、微細な角度でチルティングと回転が可能な、かつ操作性の優れた機能を提供する。
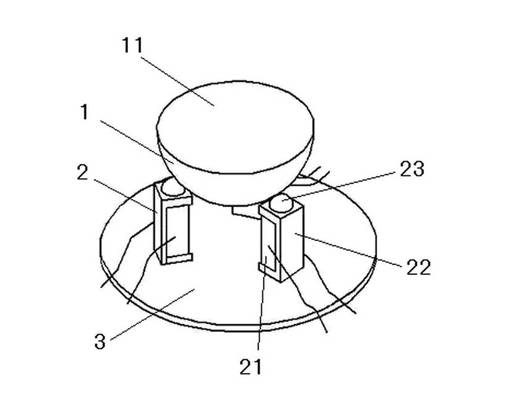
【解決手段】頂部に小球を配し、内部に圧電素子21を有し、外部を与圧ホルダー22によって補強された3本の支持脚2、観察物を搭載するステージ部11を有し、該支持脚上に載った球体1、より主に構成され、該支持脚を伸縮し上下に位置移動することにより該球体(ステージ半球)をあらゆる方向に傾斜可能で、かつθ回転可能な、物体或いは観察対象試料を該ステージ部上に載せて観察、操作、検討することを目的としたチルティング装置及びステージ部調整方法。
【解決手段】頂部に小球を配し、内部に圧電素子21を有し、外部を与圧ホルダー22によって補強された3本の支持脚2、観察物を搭載するステージ部11を有し、該支持脚上に載った球体1、より主に構成され、該支持脚を伸縮し上下に位置移動することにより該球体(ステージ半球)をあらゆる方向に傾斜可能で、かつθ回転可能な、物体或いは観察対象試料を該ステージ部上に載せて観察、操作、検討することを目的としたチルティング装置及びステージ部調整方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料片等比較的小さな対象物を観察する際に使用され、操作される
チルトステージ装置に関するものである。該チルトステージは構造が簡単で容易
に小型化が可能であり、マイクロロボットと共に或いは電子顕微鏡(SEM)或
いは各種顕微鏡と共に使用されることが可能である。
【背景技術】
【0002】
或る物体を観察、検討するために観察対象試料をステージ上に乗せ、該ステー
ジを様々な角度に傾斜させステージ上の物体或いは試料を観察、検討することは
広く研究、開発、産業分野にて行われて来た。
【0003】
例えばゴニオステージといった構造を持つ、嵌合する凸円柱部分面と凹円柱部
分面を摺動させ凸円柱部分上の台を一方向に傾斜させる方式が有り、この台構造
を2段にし上段と下段の台の摺動方向を互いに直角にすることによりあらゆる方
向に傾斜可能な2軸方式ゴニオステージも提供されている。軸数が増えるとその
分機構寸法が大きくなり、構造も複雑となり製造コストアップに繋がる。
【0004】
ゴニオステージの改良について、例えば特許文献1に述べられゴニオステージ
が広く使用されていることが知られている。
【特許文献1】特開平11−161337
【0005】
ゴニオステージにおける操作はネジ歯車とハスバ歯車の組み合わせ等による駆
動が一般的であり、その微調整には熟練を要する等の問題があり歯車を使用して
の調整には自ずとその限界があった。歯車により構成されるために構造が小さく
出きず同様に限界があった。因みに角度分解能は従来のゴニオステージ等におい
ては約1度、本発明によるチルトステージでは傾き角度及び回転角度は2/1000度である。
【0006】
走査型電子顕微鏡(SEM)内で観察対象試料を観察、検討する場合、観察時
のチャンバー内は真空を引くためチャンバーの開閉回数を減らしたいという理由、
また焦点深度を深くとって様々な角度より対象試料を観察したいという理由から、
観察対象試料を微細にチルティング及び回転させての観察がより効率的な作業と
なる。
【0007】
チルティング機能については一部の電子顕微鏡には実装されているが角度分解
能はゴニオステージ同様約1度であって良好ではない。簡易電子顕微鏡やその他
の顕微鏡など小規模型に微少ステップのチルティング及び回転機能は実装されて
いない。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明の目的は、単純な構造で安価に製造できるチルトステージにより試料片
等比較的小さな対象物を観察する際、微細な角度でチルティングと回転が可能な、
かつ操作性の優れた機能を提供することである。また本チルトステージは小型化
が容易であるためにマイクロロボットにも搭載可能で、小規模なシステムにおい
ても有効に機能する。
【課題を解決するための手段】
【0009】
本発明を具現化するための3点支持式チルトステージを詳述する。該チルトス
テージは3本の圧電素子を主要部とする3本の支持脚、該支持脚頂部に固定され
た球状部位を有する支持体、該支持体上に載るステージ半球(以下「球体」と称
する)、及び該支持脚が固定配置されたベースを主要構成要素とする。またベース
上にさらにクランプ機構が固定配置され構成されることもある。
【0010】
3点支持式チルトステージでは支持脚の頂部(上部先端)に固定された球状部
位を有する支持体により球状部位を有する球体を搭載支持している。なお支持体
は該球体と接触する部分が球状であることが好ましく他の部分はいかなる形状で
あってよい。したがって3点の支持体間隔と球体のサイズ(大きさ)により決定
される接点位置により駆動効率および最小分解能が変化することとなる。本発明
の目指す小型化のためにサイズと最小分解能のトレードオフ点を探す必要がある。
【0011】
観察サンプルを搭載する場合には最大半径面で切断された半球が、最も好まし
い。何故ならば最大面積でサンプルを載せ易いこと、及び球体の中心と支持体接
点の関係が常に一定の距離となるため、該支持接点回りのチルティングが可能と
なる理由による。
【0012】
以下、3本の支持脚と該支持脚に載る球体を例にとり位置関係に着目し考察す
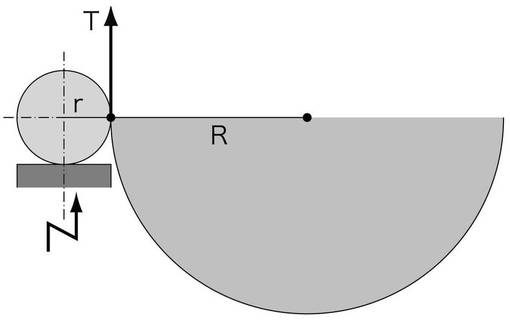
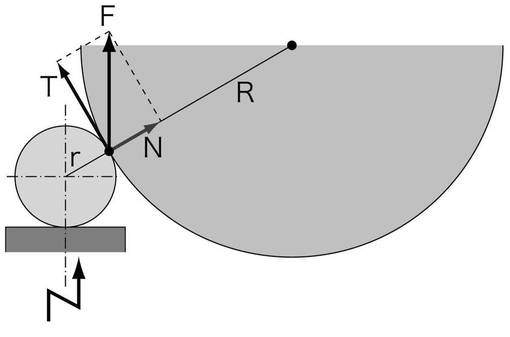
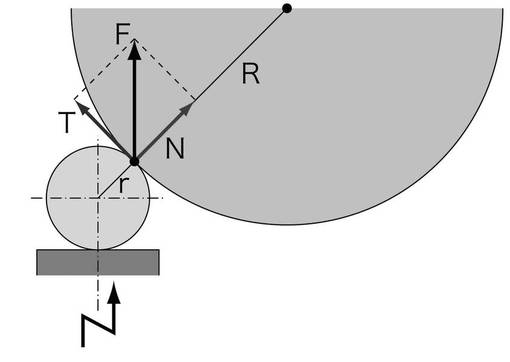
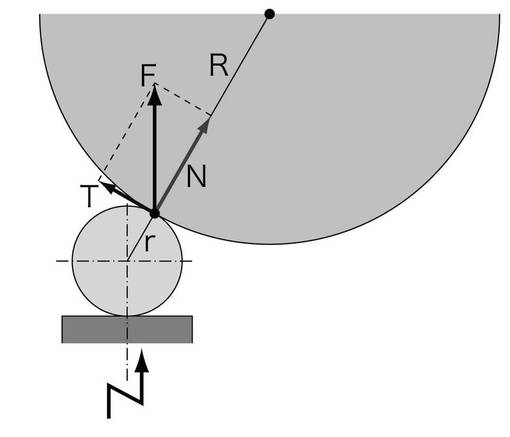
る。図1、図2、図3、図4に示すとおり、一点鎖線で示される支持体の直径断
面と球状部位を有する球体(ステージ半球)の接点が、それぞれ0度、30度、
45度、60度を為す位置関係に存在する場合、図3に示す45度の位置関係に
おいて駆動効率、分解能共にバランスの取れている均衡点である。すなわち接点
角45度での3点接触が最も扱いやすいと考えられる。
【0013】
しかしながら本発明の一つの使用目的、すなわち電子顕微鏡内での使用を考慮
した場合、機構および観察面を含めた最大高さをできる限り低くする必要がある。
なぜならば、電子顕微鏡の狭いチャンバー内においては高さ及び横方向の広がり
(WD)が最大ネックであることは研究に従事する関係者間での共通の認識とな
っているからである。
【0014】
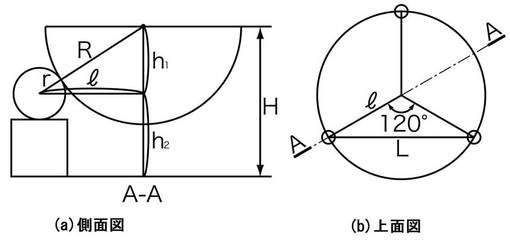
図5に示す機構のパラメータをそれぞれ取る。(a)は機構を側面から見た図、
(b)は機構を上面から見た状態である。AA断面が(a)の図となる。図5(a)
から接点角度を、図5(b)から支持点間距離を求めることができる。圧電素子
を小さくし駆動効率とサイズを考慮し、ステージ部を含む球体の最大高さ、接点
間距離および接点角度は、H12.7mm、L18.2mm、θ24.1度とし
た。表1に最大高さと接点角度の関係を示す。
【表1】

接点角度と最大高さの関係図
【0015】
機構および観察面を含めた最大高さをできる限り低くするための一方策として
支持脚を伸縮するための圧電素子自体もより小さなサイズを採用することが好ま
しい。図6に示すとおり、圧電素子に引張り応力を加えないためにヒンジ構造を
持ち圧電素子に与圧を付加するホルダーを予め組み付けてある。
【0016】
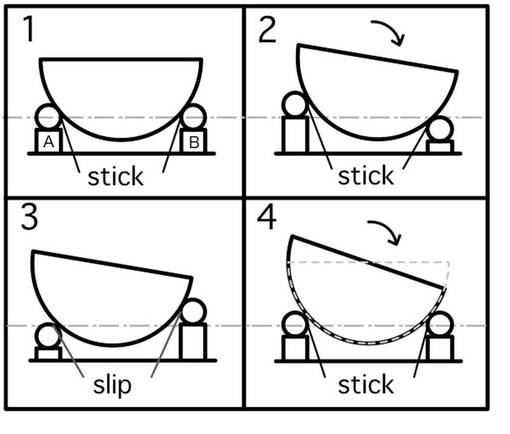
球体の駆動について、図7に移動サイクルを示す。3点支持状況を側面より見
ているため圧電素子PZT−A、PZT−Bのみ図7に示されているが、PZT
−Bの図面奥の重なる位置に圧電素子PZT−Cが存在している。PZT−Bお
よびPZT−Cには同位相の波形を印加するため、以下にPZT−Bと記述する
が実際にはPZT−Cも同様である。
【0017】
(1)初期状態PZT−AおよびPZT−Bは自然長に対し50%の伸び位置に
て静止している。支持体と球体の接点は静止摩擦力により固定されている。
【0018】
(2)PZT−Aは伸長動作を、PZT−Bは収縮動作を行いこのとき静止摩擦
力を越えない範囲で伸縮動作をさせることにより、球体は支持体の上を転
がりステージ部が時計回りに回転する。
【0019】
(3)それぞれの素子が最大変位に達したところで急激に逆位相の波形を印加す
ることによりPZT−Aは急激な収縮動作を、PZT−Bは急激な伸長動
作を行う。このため支持体と球体の接点は滑り、球体は8時方向にPZT
−B側支持点に沿うように落下する。このためこの状態では観察対象面(
回転中心)がずれることとなる。
【0020】
(4)それぞれの素子が最大変位に達したところで再び緩やかに自然長に対して
50%の伸び位置になるまでPZT−Aを伸長動作、PZT−Bは収縮動
作を行う。このとき静止摩擦力を超えない範囲で伸縮動作をさせることに
より、再び球体は支持体の上をころがりステージ部が時計回りに回転する。
圧電素子の変位量が初期状態と等しくなり回転中心が元の位置に戻りス
テージ部は時計回り回転変位を残していることがわかる。
【0021】
以上(1)〜(4)のサイクルを繰り返すことによりステージ部はチルティン
グ動作を行う。
【0022】
以上チルトステージ機構について記したが、支持体と球体は摩擦力のみで保持
されているため姿勢の保持が困難であるという問題を抱えていた。これを解決す
るためのクランプ機構を提供する。
【0023】
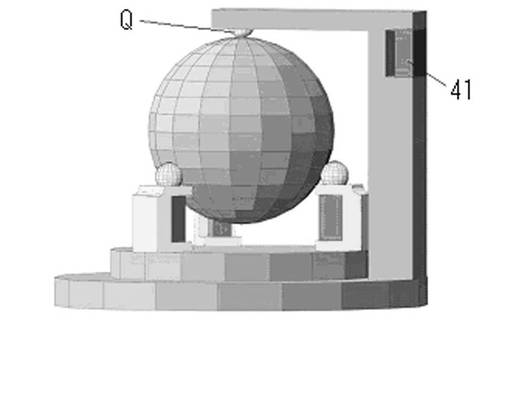
クランプ機構を図8に示す。このクランプ機構はてこの原理を用いた変位拡大
機構であって、力点の駆動には圧電素子41を使用している。球体を押さえる作
用点QのZ方向の変位量は圧電素子の変位を拡大して得られる。また球体中心に
点接触でコンタクトできるように作用点Qにはボールを埋め込んでいる。球体中
心へ点接触するため、てこの原理で球体を押さえ込んだ際に球体を遥動させるこ
とがない。
【0024】
クランプ先端部の変位は、一例として圧電素子変位の4.7倍程度になるよう
設計され推奨駆動電圧100Vで駆動させた場合、圧電素子の変位が2.6μm
に対しクランプ先端部は13.2μmの変位を示した。10〜110Vまで駆動
電圧を変化させた場合、5倍程度の比率を確認した。設計によりクランプ先端部
変位量と圧電素子変位量を任意に設計可能であり、有効に作動させるには作動時
のクランプ先端部の変位量が、支持脚内部の圧電素子変位量よりも多ければ良い。
【0025】
当該クランプ機構を採用することにより、チルト動作時の或る状態を保持する
ことが可能となり、ステージ上の例えばサンプル操作を安定した状態で行うこと
が出来ることとなった。
【0026】
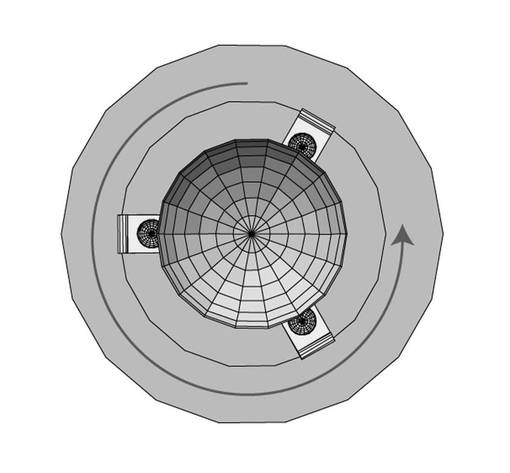
チルトステージの制御動作の回転制御については、それぞれの圧電素子に位相
をずらし、例えば700Hzの波形を入力すると目視できる速度での回転を提供
可能となった。又この回転は一方向の回転を特定可能であることが解った。θ回
転制御モデル図を図9に示す。
【発明の効果】
【0027】
球体を3点支持することにより常に安定して球体を支えることが可能であり、
又該3点支持点位置を独立して上下方向に変化させることにより、球体をあらゆ
る方向に傾斜させ、球体上に設けられた平面或いは所定の面によるステージ部が
結果としてあらゆる方向に傾斜され、該ステージ部上の物体或いは観察対象試料
を仔細に角度をつけて観察、操作、検討することが可能となった。
【発明を実施するための最良の形態】
【0028】
本発明の特徴ある特色と利点は、添付図面に関して提供される以下の実施例の
記述から更に明白となるであろう。
【0029】
図10において、3本の支持脚2は内部に圧電素子21を、外部にヒンジ構造
より成る与圧ホルダー22にて構成され、該与圧ホルダー22にて与圧補強され、
その頂部(先端)に支持体23が固定配置されている。支持体23上には球体1
が載っている。図10においては2個の与圧ホルダーが主に手前に描かれている
が第3の与圧ホルダーは奥側に存在しその下部の一部が僅かに見える。3本の支
持脚はベース3上に正三角形の位置関係にて固定配置されている。図に示すよう
にそれぞれの圧電素子21には外部より信号が印加されるケーブルが繋がれてい
る。
【0030】
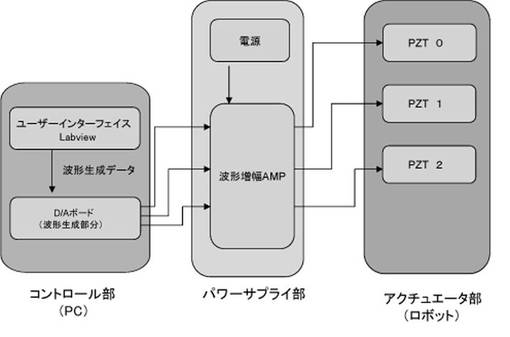
次に駆動方法を主にした実施例を説明する。チルトのシステム構成図を図11
に示す。チルトステージは主要部として与圧ホルダー22内に収められた3本の
圧電素子21から構成されており、該圧電素子21へ印加する電圧の指令波形(デ
ジタル)はPCで作成される。このとき指令波形は波形分割数を設定してデジタ
ルデータとして作成される。
【0031】
チルトステージは慣性駆動で駆動されており、その波形を簡略化するために、
のこぎり波や三角波が用いられる。この時ののこぎり波や三角波の波形の分割数
を高くすればするほどなめらかな波形を作成可能だが、この波形のデジタルデー
タをD/A(デジタル/アナログ)ボードを介してアンプ(アナログ)へ出力する場
合には、D/Aボードの応答速度と1波形を出力する速度(駆動周波数)によって
波形分割数は制限される。
【0032】
この波形形状の電圧をアンプが出力するために、もとの指令波形がなめらかで
あるほど電圧値がなめらかに上昇、或いは下降するので、圧電素子の変位も滑ら
かに変化する。電圧(圧電素子変位)の滑らかな変化にこだわる理由は、チルト
ステージが慣性駆動によって動作しているためである。
【0033】
このため、圧電素子の変位の急激な変化は慣性力を得たい場合にのみ必要で、
慣性力を必要としない(時間的)部分については圧電素子の変位が急激に変化す
るのではなく、滑らかに変化する必要があり、そのためには圧電素子に印加する
電圧が滑らかに変化する必要がある。
【0034】
チルトステージではD/Aボード応答速度や駆動周波数、波形分割数などを考慮
して指令波形を簡略化しつつ慣性駆動ができるようにするために、のこぎり波や
三角波を使用している。
【0035】
のこぎり波の指令波形をPCから出力したときに圧電素子の変位を図12に示
す。しかしこの変位の場合圧電素子の変位が急激に変化して図12のA、B、C点
で それぞれ慣性力が発生する。本来はB点でのみ慣性力を期待するがA、C点
でも発生してしまう。そのため、D/Aボード応答速度や駆動周波数、波形分割数
などの制限がなければ、C点もA点のように滑らかに図12に示すように2次曲
線を描いてゼロへ接続するとさらによくなり、期待されるB点でのみ慣性力を発
生させる慣性駆動が実現される。
【0036】
上述のように、慣性力を利用した駆動方式を使っている為に、駆動した際の移
動体の移動量は、主に与えられる慣性力の変化によって変化する。そのため慣性
力を変化させる原因となるパラメータを変化させることで、移動体の移動量を制
御可能となる。
【0037】
たとえば、駆動周波数を変化させると慣性力のもととなる衝撃力の大きさが変
化する。また、電圧値を変化させても、衝撃力が変化する。(さらに、静止摩擦係
数や移動体や慣性体(錘)質量を変化させることでも可能である。) このため、
このようなパラメータを変化させたり、指令波形を生成する部分、波形の形状や
波形分割数を設定可能なオペレーションプログラムとなっている。
【0038】
駆動動作については[0017]より[0020]に述べられているとおりで
ある。
【図面の簡単な説明】
【0039】
【図1】球体と支持点の接点確度が0度である球体及び支持点断面図 。 <最大回転力となる理想状態(接点角0deg)>
【図2】球体と支持点の接点角度が30度である球体及び支持点断面図。 <駆動力がT>Nとなる場合(接点角30deg)>
【図3】球体と支持点の接点角度が45度である球体及び支持点断面図。 <駆動力がT=Nとなる場合(接点角45deg)>
【図4】球体と支持点の接点角度が60度である球体及び支持点断面図。 <駆動力がT<Nとなる場合(接点角60deg)>
【図5】パラメータ算出用記号関係図。
【図6】ヒンジ構造ホルダー図
【図7】チルトステージの移動サイクル図
【図8】クランプ機構図
【図9】θ回転制御モデル図
【図10】実施例見取図
【図11】チルトのシステム構成図
【図12】クランプ機構図
【符号の説明】
【0040】
1 球体(ステージ半球)
11 ステージ部
2 支持脚
21 圧電素子
22 与圧ホルダー
23 支持体
3 ベース
41 圧電素子
A 圧電素子変位の急激変加点
B 圧電素子変位の急激変加点
C 圧電素子変位の急激変加点
Q 作用点
【技術分野】
【0001】
本発明は、試料片等比較的小さな対象物を観察する際に使用され、操作される
チルトステージ装置に関するものである。該チルトステージは構造が簡単で容易
に小型化が可能であり、マイクロロボットと共に或いは電子顕微鏡(SEM)或
いは各種顕微鏡と共に使用されることが可能である。
【背景技術】
【0002】
或る物体を観察、検討するために観察対象試料をステージ上に乗せ、該ステー
ジを様々な角度に傾斜させステージ上の物体或いは試料を観察、検討することは
広く研究、開発、産業分野にて行われて来た。
【0003】
例えばゴニオステージといった構造を持つ、嵌合する凸円柱部分面と凹円柱部
分面を摺動させ凸円柱部分上の台を一方向に傾斜させる方式が有り、この台構造
を2段にし上段と下段の台の摺動方向を互いに直角にすることによりあらゆる方
向に傾斜可能な2軸方式ゴニオステージも提供されている。軸数が増えるとその
分機構寸法が大きくなり、構造も複雑となり製造コストアップに繋がる。
【0004】
ゴニオステージの改良について、例えば特許文献1に述べられゴニオステージ
が広く使用されていることが知られている。
【特許文献1】特開平11−161337
【0005】
ゴニオステージにおける操作はネジ歯車とハスバ歯車の組み合わせ等による駆
動が一般的であり、その微調整には熟練を要する等の問題があり歯車を使用して
の調整には自ずとその限界があった。歯車により構成されるために構造が小さく
出きず同様に限界があった。因みに角度分解能は従来のゴニオステージ等におい
ては約1度、本発明によるチルトステージでは傾き角度及び回転角度は2/1000度である。
【0006】
走査型電子顕微鏡(SEM)内で観察対象試料を観察、検討する場合、観察時
のチャンバー内は真空を引くためチャンバーの開閉回数を減らしたいという理由、
また焦点深度を深くとって様々な角度より対象試料を観察したいという理由から、
観察対象試料を微細にチルティング及び回転させての観察がより効率的な作業と
なる。
【0007】
チルティング機能については一部の電子顕微鏡には実装されているが角度分解
能はゴニオステージ同様約1度であって良好ではない。簡易電子顕微鏡やその他
の顕微鏡など小規模型に微少ステップのチルティング及び回転機能は実装されて
いない。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明の目的は、単純な構造で安価に製造できるチルトステージにより試料片
等比較的小さな対象物を観察する際、微細な角度でチルティングと回転が可能な、
かつ操作性の優れた機能を提供することである。また本チルトステージは小型化
が容易であるためにマイクロロボットにも搭載可能で、小規模なシステムにおい
ても有効に機能する。
【課題を解決するための手段】
【0009】
本発明を具現化するための3点支持式チルトステージを詳述する。該チルトス
テージは3本の圧電素子を主要部とする3本の支持脚、該支持脚頂部に固定され
た球状部位を有する支持体、該支持体上に載るステージ半球(以下「球体」と称
する)、及び該支持脚が固定配置されたベースを主要構成要素とする。またベース
上にさらにクランプ機構が固定配置され構成されることもある。
【0010】
3点支持式チルトステージでは支持脚の頂部(上部先端)に固定された球状部
位を有する支持体により球状部位を有する球体を搭載支持している。なお支持体
は該球体と接触する部分が球状であることが好ましく他の部分はいかなる形状で
あってよい。したがって3点の支持体間隔と球体のサイズ(大きさ)により決定
される接点位置により駆動効率および最小分解能が変化することとなる。本発明
の目指す小型化のためにサイズと最小分解能のトレードオフ点を探す必要がある。
【0011】
観察サンプルを搭載する場合には最大半径面で切断された半球が、最も好まし
い。何故ならば最大面積でサンプルを載せ易いこと、及び球体の中心と支持体接
点の関係が常に一定の距離となるため、該支持接点回りのチルティングが可能と
なる理由による。
【0012】
以下、3本の支持脚と該支持脚に載る球体を例にとり位置関係に着目し考察す
る。図1、図2、図3、図4に示すとおり、一点鎖線で示される支持体の直径断
面と球状部位を有する球体(ステージ半球)の接点が、それぞれ0度、30度、
45度、60度を為す位置関係に存在する場合、図3に示す45度の位置関係に
おいて駆動効率、分解能共にバランスの取れている均衡点である。すなわち接点
角45度での3点接触が最も扱いやすいと考えられる。
【0013】
しかしながら本発明の一つの使用目的、すなわち電子顕微鏡内での使用を考慮
した場合、機構および観察面を含めた最大高さをできる限り低くする必要がある。
なぜならば、電子顕微鏡の狭いチャンバー内においては高さ及び横方向の広がり
(WD)が最大ネックであることは研究に従事する関係者間での共通の認識とな
っているからである。
【0014】
図5に示す機構のパラメータをそれぞれ取る。(a)は機構を側面から見た図、
(b)は機構を上面から見た状態である。AA断面が(a)の図となる。図5(a)
から接点角度を、図5(b)から支持点間距離を求めることができる。圧電素子
を小さくし駆動効率とサイズを考慮し、ステージ部を含む球体の最大高さ、接点
間距離および接点角度は、H12.7mm、L18.2mm、θ24.1度とし
た。表1に最大高さと接点角度の関係を示す。
【表1】
接点角度と最大高さの関係図
【0015】
機構および観察面を含めた最大高さをできる限り低くするための一方策として
支持脚を伸縮するための圧電素子自体もより小さなサイズを採用することが好ま
しい。図6に示すとおり、圧電素子に引張り応力を加えないためにヒンジ構造を
持ち圧電素子に与圧を付加するホルダーを予め組み付けてある。
【0016】
球体の駆動について、図7に移動サイクルを示す。3点支持状況を側面より見
ているため圧電素子PZT−A、PZT−Bのみ図7に示されているが、PZT
−Bの図面奥の重なる位置に圧電素子PZT−Cが存在している。PZT−Bお
よびPZT−Cには同位相の波形を印加するため、以下にPZT−Bと記述する
が実際にはPZT−Cも同様である。
【0017】
(1)初期状態PZT−AおよびPZT−Bは自然長に対し50%の伸び位置に
て静止している。支持体と球体の接点は静止摩擦力により固定されている。
【0018】
(2)PZT−Aは伸長動作を、PZT−Bは収縮動作を行いこのとき静止摩擦
力を越えない範囲で伸縮動作をさせることにより、球体は支持体の上を転
がりステージ部が時計回りに回転する。
【0019】
(3)それぞれの素子が最大変位に達したところで急激に逆位相の波形を印加す
ることによりPZT−Aは急激な収縮動作を、PZT−Bは急激な伸長動
作を行う。このため支持体と球体の接点は滑り、球体は8時方向にPZT
−B側支持点に沿うように落下する。このためこの状態では観察対象面(
回転中心)がずれることとなる。
【0020】
(4)それぞれの素子が最大変位に達したところで再び緩やかに自然長に対して
50%の伸び位置になるまでPZT−Aを伸長動作、PZT−Bは収縮動
作を行う。このとき静止摩擦力を超えない範囲で伸縮動作をさせることに
より、再び球体は支持体の上をころがりステージ部が時計回りに回転する。
圧電素子の変位量が初期状態と等しくなり回転中心が元の位置に戻りス
テージ部は時計回り回転変位を残していることがわかる。
【0021】
以上(1)〜(4)のサイクルを繰り返すことによりステージ部はチルティン
グ動作を行う。
【0022】
以上チルトステージ機構について記したが、支持体と球体は摩擦力のみで保持
されているため姿勢の保持が困難であるという問題を抱えていた。これを解決す
るためのクランプ機構を提供する。
【0023】
クランプ機構を図8に示す。このクランプ機構はてこの原理を用いた変位拡大
機構であって、力点の駆動には圧電素子41を使用している。球体を押さえる作
用点QのZ方向の変位量は圧電素子の変位を拡大して得られる。また球体中心に
点接触でコンタクトできるように作用点Qにはボールを埋め込んでいる。球体中
心へ点接触するため、てこの原理で球体を押さえ込んだ際に球体を遥動させるこ
とがない。
【0024】
クランプ先端部の変位は、一例として圧電素子変位の4.7倍程度になるよう
設計され推奨駆動電圧100Vで駆動させた場合、圧電素子の変位が2.6μm
に対しクランプ先端部は13.2μmの変位を示した。10〜110Vまで駆動
電圧を変化させた場合、5倍程度の比率を確認した。設計によりクランプ先端部
変位量と圧電素子変位量を任意に設計可能であり、有効に作動させるには作動時
のクランプ先端部の変位量が、支持脚内部の圧電素子変位量よりも多ければ良い。
【0025】
当該クランプ機構を採用することにより、チルト動作時の或る状態を保持する
ことが可能となり、ステージ上の例えばサンプル操作を安定した状態で行うこと
が出来ることとなった。
【0026】
チルトステージの制御動作の回転制御については、それぞれの圧電素子に位相
をずらし、例えば700Hzの波形を入力すると目視できる速度での回転を提供
可能となった。又この回転は一方向の回転を特定可能であることが解った。θ回
転制御モデル図を図9に示す。
【発明の効果】
【0027】
球体を3点支持することにより常に安定して球体を支えることが可能であり、
又該3点支持点位置を独立して上下方向に変化させることにより、球体をあらゆ
る方向に傾斜させ、球体上に設けられた平面或いは所定の面によるステージ部が
結果としてあらゆる方向に傾斜され、該ステージ部上の物体或いは観察対象試料
を仔細に角度をつけて観察、操作、検討することが可能となった。
【発明を実施するための最良の形態】
【0028】
本発明の特徴ある特色と利点は、添付図面に関して提供される以下の実施例の
記述から更に明白となるであろう。
【0029】
図10において、3本の支持脚2は内部に圧電素子21を、外部にヒンジ構造
より成る与圧ホルダー22にて構成され、該与圧ホルダー22にて与圧補強され、
その頂部(先端)に支持体23が固定配置されている。支持体23上には球体1
が載っている。図10においては2個の与圧ホルダーが主に手前に描かれている
が第3の与圧ホルダーは奥側に存在しその下部の一部が僅かに見える。3本の支
持脚はベース3上に正三角形の位置関係にて固定配置されている。図に示すよう
にそれぞれの圧電素子21には外部より信号が印加されるケーブルが繋がれてい
る。
【0030】
次に駆動方法を主にした実施例を説明する。チルトのシステム構成図を図11
に示す。チルトステージは主要部として与圧ホルダー22内に収められた3本の
圧電素子21から構成されており、該圧電素子21へ印加する電圧の指令波形(デ
ジタル)はPCで作成される。このとき指令波形は波形分割数を設定してデジタ
ルデータとして作成される。
【0031】
チルトステージは慣性駆動で駆動されており、その波形を簡略化するために、
のこぎり波や三角波が用いられる。この時ののこぎり波や三角波の波形の分割数
を高くすればするほどなめらかな波形を作成可能だが、この波形のデジタルデー
タをD/A(デジタル/アナログ)ボードを介してアンプ(アナログ)へ出力する場
合には、D/Aボードの応答速度と1波形を出力する速度(駆動周波数)によって
波形分割数は制限される。
【0032】
この波形形状の電圧をアンプが出力するために、もとの指令波形がなめらかで
あるほど電圧値がなめらかに上昇、或いは下降するので、圧電素子の変位も滑ら
かに変化する。電圧(圧電素子変位)の滑らかな変化にこだわる理由は、チルト
ステージが慣性駆動によって動作しているためである。
【0033】
このため、圧電素子の変位の急激な変化は慣性力を得たい場合にのみ必要で、
慣性力を必要としない(時間的)部分については圧電素子の変位が急激に変化す
るのではなく、滑らかに変化する必要があり、そのためには圧電素子に印加する
電圧が滑らかに変化する必要がある。
【0034】
チルトステージではD/Aボード応答速度や駆動周波数、波形分割数などを考慮
して指令波形を簡略化しつつ慣性駆動ができるようにするために、のこぎり波や
三角波を使用している。
【0035】
のこぎり波の指令波形をPCから出力したときに圧電素子の変位を図12に示
す。しかしこの変位の場合圧電素子の変位が急激に変化して図12のA、B、C点
で それぞれ慣性力が発生する。本来はB点でのみ慣性力を期待するがA、C点
でも発生してしまう。そのため、D/Aボード応答速度や駆動周波数、波形分割数
などの制限がなければ、C点もA点のように滑らかに図12に示すように2次曲
線を描いてゼロへ接続するとさらによくなり、期待されるB点でのみ慣性力を発
生させる慣性駆動が実現される。
【0036】
上述のように、慣性力を利用した駆動方式を使っている為に、駆動した際の移
動体の移動量は、主に与えられる慣性力の変化によって変化する。そのため慣性
力を変化させる原因となるパラメータを変化させることで、移動体の移動量を制
御可能となる。
【0037】
たとえば、駆動周波数を変化させると慣性力のもととなる衝撃力の大きさが変
化する。また、電圧値を変化させても、衝撃力が変化する。(さらに、静止摩擦係
数や移動体や慣性体(錘)質量を変化させることでも可能である。) このため、
このようなパラメータを変化させたり、指令波形を生成する部分、波形の形状や
波形分割数を設定可能なオペレーションプログラムとなっている。
【0038】
駆動動作については[0017]より[0020]に述べられているとおりで
ある。
【図面の簡単な説明】
【0039】
【図1】球体と支持点の接点確度が0度である球体及び支持点断面図 。 <最大回転力となる理想状態(接点角0deg)>
【図2】球体と支持点の接点角度が30度である球体及び支持点断面図。 <駆動力がT>Nとなる場合(接点角30deg)>
【図3】球体と支持点の接点角度が45度である球体及び支持点断面図。 <駆動力がT=Nとなる場合(接点角45deg)>
【図4】球体と支持点の接点角度が60度である球体及び支持点断面図。 <駆動力がT<Nとなる場合(接点角60deg)>
【図5】パラメータ算出用記号関係図。
【図6】ヒンジ構造ホルダー図
【図7】チルトステージの移動サイクル図
【図8】クランプ機構図
【図9】θ回転制御モデル図
【図10】実施例見取図
【図11】チルトのシステム構成図
【図12】クランプ機構図
【符号の説明】
【0040】
1 球体(ステージ半球)
11 ステージ部
2 支持脚
21 圧電素子
22 与圧ホルダー
23 支持体
3 ベース
41 圧電素子
A 圧電素子変位の急激変加点
B 圧電素子変位の急激変加点
C 圧電素子変位の急激変加点
Q 作用点
【特許請求の範囲】
【請求項1】
観察物を搭載する搭載面を規定しステージ部を有する球状部位を備えた球体と、
前記球体と点接触した状態で伸縮する3本の支持脚とを備え、前記各支持脚は圧
電素子によって伸縮することを特徴とするチルトステージ装置。
【請求項2】
請求項1において、前記ステージ部は球状部位を規定する球体を備え、球体の
端面によって前記搭載面を形成していることを特徴とするチルトステージ装置。
【請求項3】
請求項1〜2のいずれか一つにおいて、圧電素子を主要部とする3本の支持脚
の頂部に支持体が設けられ、接触点において搭載される球体と良好な摩擦関係を
維持することを特徴とするチルトステージ装置。
【請求項4】
請求項1〜3のいずれか一つにおいて、3本の支持脚内部に圧電素子を有し外
側部をヒンジ構造等による与圧ホルダーによって与圧されたことを特徴とするチ
ルトステージ装置。
【請求項5】
請求項1〜4のいずれか一つにおいて、前記ステージ部或いは球状部位を規定
する球体に部分接触する、クランプ支持脚内部に圧電素子を包含したクランプ機
構を備えたことを特徴とするチルトステージ装置。
【請求項6】
請求項1〜5のいずれか一つにおいて、作動時のクランプ先端部の変位量が、
クランプ支持脚内部の圧電素子変位量よりも多いことを特徴とするチルトステー
ジ装置。
【請求項7】
請求項1〜6のいずれか一つにおいて、駆動時支持脚内部の圧電素子に、位相
をずらした波形を入力することにより、球体が一方向に回転することを特徴とす
るチルトステージ装置。
【請求項8】
請求項1〜7のいずれか一つに記載された前記チルトステージ装置を含む電子
顕微鏡。
【請求項9】
観察物搭載面を規定し、球状部位を備えた球体に、圧電素子を有する支持脚の
頂部に位置する支持体を点接触させ、前記圧電素子を伸縮させることにより、前
記観察物搭載面を変位させることを特徴とする搭載面調整方法。
【請求項1】
観察物を搭載する搭載面を規定しステージ部を有する球状部位を備えた球体と、
前記球体と点接触した状態で伸縮する3本の支持脚とを備え、前記各支持脚は圧
電素子によって伸縮することを特徴とするチルトステージ装置。
【請求項2】
請求項1において、前記ステージ部は球状部位を規定する球体を備え、球体の
端面によって前記搭載面を形成していることを特徴とするチルトステージ装置。
【請求項3】
請求項1〜2のいずれか一つにおいて、圧電素子を主要部とする3本の支持脚
の頂部に支持体が設けられ、接触点において搭載される球体と良好な摩擦関係を
維持することを特徴とするチルトステージ装置。
【請求項4】
請求項1〜3のいずれか一つにおいて、3本の支持脚内部に圧電素子を有し外
側部をヒンジ構造等による与圧ホルダーによって与圧されたことを特徴とするチ
ルトステージ装置。
【請求項5】
請求項1〜4のいずれか一つにおいて、前記ステージ部或いは球状部位を規定
する球体に部分接触する、クランプ支持脚内部に圧電素子を包含したクランプ機
構を備えたことを特徴とするチルトステージ装置。
【請求項6】
請求項1〜5のいずれか一つにおいて、作動時のクランプ先端部の変位量が、
クランプ支持脚内部の圧電素子変位量よりも多いことを特徴とするチルトステー
ジ装置。
【請求項7】
請求項1〜6のいずれか一つにおいて、駆動時支持脚内部の圧電素子に、位相
をずらした波形を入力することにより、球体が一方向に回転することを特徴とす
るチルトステージ装置。
【請求項8】
請求項1〜7のいずれか一つに記載された前記チルトステージ装置を含む電子
顕微鏡。
【請求項9】
観察物搭載面を規定し、球状部位を備えた球体に、圧電素子を有する支持脚の
頂部に位置する支持体を点接触させ、前記圧電素子を伸縮させることにより、前
記観察物搭載面を変位させることを特徴とする搭載面調整方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−15840(P2010−15840A)
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願番号】特願2008−175219(P2008−175219)
【出願日】平成20年7月4日(2008.7.4)
【出願人】(505246066)株式会社アプライド・マイクロシステム (7)
【Fターム(参考)】
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願日】平成20年7月4日(2008.7.4)
【出願人】(505246066)株式会社アプライド・マイクロシステム (7)
【Fターム(参考)】
[ Back to top ]