
ツールセンタポイント調整方法
【課題】ツールセンタポイントの座標位置の調整を短時間でかつ効率良く行うこと。
【解決手段】各運動軸C1,C2,C3をツールセンタポイントVPを支点にして円運動させつつ、実際のツールセンタポイントの停止を視認できるまで、各運動軸C1,C2,C3の軸方向におけるツールセンタポイントVPの位置を調整する。
【解決手段】各運動軸C1,C2,C3をツールセンタポイントVPを支点にして円運動させつつ、実際のツールセンタポイントの停止を視認できるまで、各運動軸C1,C2,C3の軸方向におけるツールセンタポイントVPの位置を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、産業用ロボットを制御するロボット制御装置に記憶されたツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整するツールセンタポイント調整方法に関する。
【背景技術】
【0002】
ツールセンタポイント調整方法について種々の技術が開発されており、先行技術として特許文献1に示すものがある。そして、先行技術に係るツールセンタポイント調整方法について説明すると、次のようになる。
【0003】
即ち、産業用ロボットにおけるフランジ面のツール座標系の原点とツールセンタポイントを通る所定の仮想線を第1の回転軸として選定する。そして、第1の回転軸を中心としてツールセンタポイントを回転させ、実際のツールセンタポイントが第1の回転軸を中心として弧を描かなくなるまで、ツールセンタポイントの座標位置を調整する(第1の調整工程)。
【0004】
第1の調整工程の終了後に、ツールセンタポイントを通りかつツール座標系のZ軸と第1の回転軸を含む平面に垂直な所定の仮想線を第2の回転軸として選定する。そして、第2の回転軸を中心としてツールセンタポイントを回転させ、実際のツールセンタポイントが第2の回転軸を中心として弧を描かなくなるまで、ツールセンタポイントの座標位置を調整する(第2の調整工程)。
【0005】
以上により、ツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第265618号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、前述の先行技術に係るツールセンタポイント調整方法にあっては、各調整工程においてツールセンタポイントの座標位置を調整しており、換言すれば、各調整工程における調整パラメータ(調整要素)は2つであるため、各調整工程の処理が複雑化して、ツールセンタポイントの座標位置の調整に多くの時間を要するという問題がある。
【0008】
また、各回転軸は条件付けされた所定の仮想軸であるため、各回転軸の選定の自由度が低く、各回転軸を中心としてツールセンタポイントを回転させる際に、産業用ロボットにおけるロボットアームが特異姿勢になって、ツールセンタポイントの座標位置の調整が中断することがあるという問題がある。
【0009】
そこで、本発明は、前述の問題を解決することができる、新規な構成のツールセンタポイント調整方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の特徴は、産業用ロボットを制御するロボット制御装置に記憶されたツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整するツールセンタポイント調整方法において、前記ツールセンタポイントを通る任意の仮想軸を第1の運動軸として、前記第1の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第1の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第1の調整工程と、前記第1の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と異なる任意の仮想軸を第2の運動軸として、前記第2の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第2の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第2の調整工程と、前記第2の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と前記第2の運動軸を含む仮想平面に交わる任意の仮想軸を第3の運動軸として、前記第3の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第3の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第3の調整工程と、を備えたことを要旨とする。
【0011】
なお、座標位置とは、前記産業用ロボットにおけるフランジ面(フランジの面)のツール座標系の原点を基準とした位置のことであって、特定運動とは、円運動、円弧運動、直線運動、円運動以外のループ運動等を含む意である。
【0012】
本発明の特徴によると、各運動軸(前記第1の運動軸、前記第2の運動軸、及び前記第3の運動軸)の軸方向、換言すれば、異なる3方向における前記ツールセンタポイントの位置と前記実際のツールセンタポイントの位置を同じにすることができ、前記ツールセンタポイントの座標位置を前記実際のツールセンタポイントの座標位置に一致させるように調整することができる。
【発明の効果】
【0013】
本発明によれば、各調整工程(前記第1の調整工程、前記第2の調整工程、及び前記第3の調整工程)における調整パラメータ(調整要素)は1つであるため、各調整工程の処理の複雑化を抑えることができる。また、各運動軸は任意の仮想軸であるため、各運動軸の選定の自由度が高くなって、前記産業用ロボットにおけるロボットアームの特異姿勢を容易に回避しつつ、各運動軸を特定運動させることができる。よって、前記ツールセンタポイントの座標位置の調整を短時間でかつ効率良く行うことができる。
【図面の簡単な説明】
【0014】
【図1】第1の実施形態に係るツールセンタポイント調整方法における第1調整工程を説明する図である。
【図2】第1の実施形態に係るツールセンタポイント調整方法における第1調整工程を説明する図である。
【図3】第1の実施形態に係るツールセンタポイント調整方法における第2調整工程を説明する図である。
【図4】第1の実施形態に係るツールセンタポイント調整方法における第3調整工程を説明する図である。
【図5】ツールセンタポイントの座標位置を調整する前におけるツールセンタポイントと実際のツールセンタポイントの位置ずれを示す図である。
【図6】第1の実施形態に係る産業用ロボットの周辺構成を示す概略的な図である。
【図7】第2の実施形態に係るツールセンタポイント調整方法の特有の構成を説明する図である。
【図8】第2の実施形態に係る産業用ロボットの周辺構成を示す概略的な図である。
【発明を実施するための形態】
【0015】
(第1の実施形態)
第1の実施形態について図1から図6を参照して説明する。
【0016】
まず、第1の実施形態に係るツールセンタポイント調整方法について説明する前に、第1の実施形態に係る産業用ロボットの構成等について簡単に説明する。
【0017】
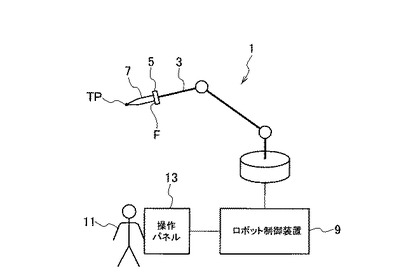
図6に示すように、第1の実施形態に係る産業用ロボット1は、多関節構造のロボットアーム3を備えており、このロボットアーム3の先端側のフランジ5には、ツール7が着脱可能に設けられている。また、産業用ロボット1の近傍には、産業用ロボット1の動作を制御するロボット制御装置9が配設されており、このロボット制御装置9には、オペレータ11の操作によって産業用ロボット1の動作を教示する操作パネル13が電気的に接続されている。
【0018】
続いて、第1の実施形態に係るツールセンタポイント調整方法について説明する。
【0019】
第1の実施形態に係るツールセンタポイント調整方法は、ロボット制御装置9に記憶されたツールセンタポイント(ツール7の先端位置)VP(図5参照)の座標位置を実際のツールセンタポイントTP(図5参照)の座標位置に一致させるように調整する方法であって、第1の調整工程、第2の調整工程、及び第3の調整工程を備えている。そして、各調整工程の具体的な内容は、次のようになる。なお、座標位置とは、産業用ロボット1におけるフランジ面F(フランジ5の面)のツール座標系の原点を基準とした位置のことである。
【0020】
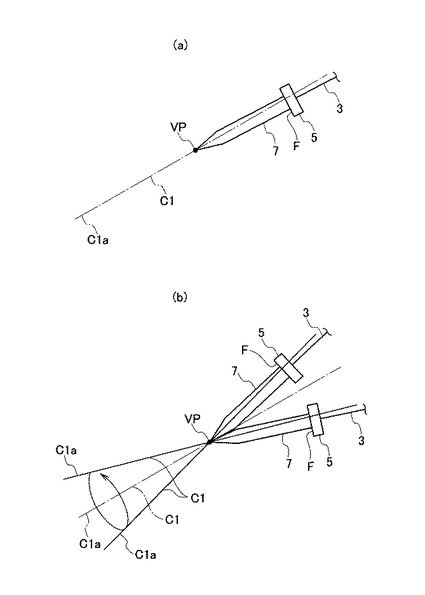
(i)第1の調整工程
図1(a)に示すように、ツールセンタポイントVPを通る任意の仮想軸を第1の運動軸C1として選定する。そして、図1(b)に示すように、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第1の運動軸C1をツールセンタポイントVPを支点にして回転運動(特定運動の一例)させつつ、オペレータ11が実際のツールセンタポイントTPの停止を視認できるまで、第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置を調整する。
【0021】
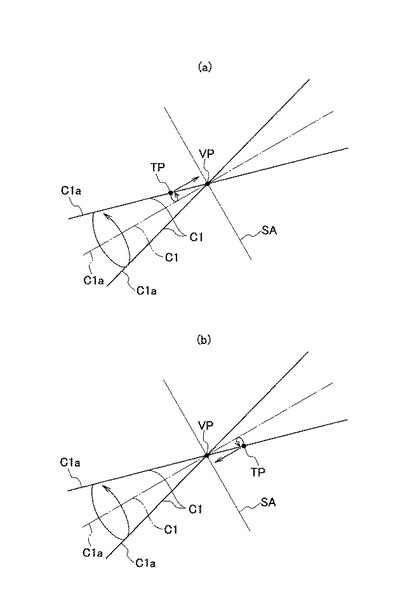
具体的には、図2(a)に示すように、実際のツールセンタポイントTPの回転運動の位相と第1の運動軸C1の先端部分C1aの回転運動の位相が同じである(換言すれば、実際のツールセンタポイントTPの回転運動の位相とフランジ面Fの回転運動の位相が異なる)とオペレータ11が視認した場合には、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をオペレータ11側に調整する。一方、図2(b)に示すように、実際のツールセンタポイントTPの回転運動の位相と第1の運動軸C1の先端部分C1aの回転運動の位相が異なる(換言すれば、実際のツールセンタポイントTPの回転運動の位相とフランジ面Fの回転運動の位相が同じである)とオペレータ11が視認した場合には、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をフランジ面F側に調整する。これにより、第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができ、換言すれば、実際のツールセンタポイントTPをツールセンタポイントVPを通りかつ第1の運動軸C1に直交する仮想平面SA上に位置させることができる。なお、第1の運動軸C1を回転運動させる際に、第1の運動軸C1は軸心周りに回転させない。
【0022】
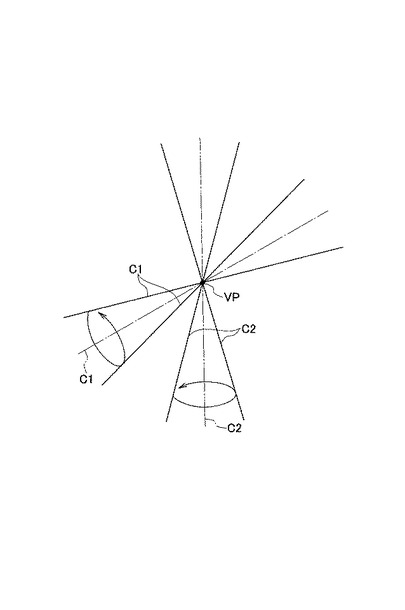
(ii)第2の調整工程
第1の調整工程の終了後に、図3に示すように、ツールセンタポイントVPを通りかつ第1の運動軸C1と異なる任意の仮想軸を第2の運動軸C2として選定する。そして、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第2の運動軸C2をツールセンタポイントVPを支点にして回転運動させつつ、オペレータ11が実際のツールセンタポイントTPの停止を視認できるまで、第2の運動軸C2の軸方向におけるツールセンタポイントVPの位置を調整する。これにより、第2の運動軸C2の軸方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができる。
【0023】
なお、第2の運動軸C2の軸方向におけるツールセンタポイントVPの位置の具体的な調整は、前述の第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置の具体的な調整と同様に行う。
【0024】
(iii)第3の調整工程
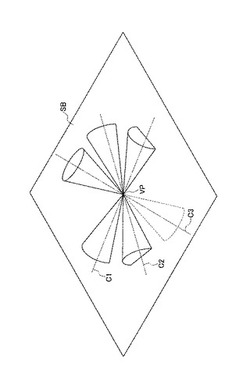
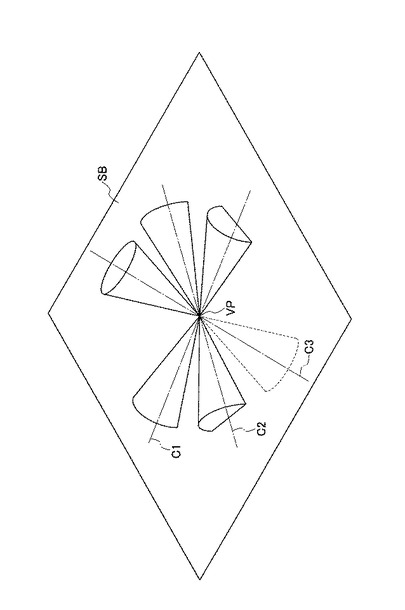
第2の調整工程の終了後に、図4に示すように、ツールセンタポイントVPを通りかつ第1の運動軸C1と第2の運動軸C2を含む仮想平面SBに交わる任意の仮想軸を第3の運動軸C3として設定する。そして、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第3の運動軸C3をツールセンタポイントを支点にして回転運動させつつ、実際のツールセンタポイントTPの停止を視認できるまで、第3の運動軸C3の軸方向におけるツールセンタポイントVPの位置を調整する。これにより、第3の運動軸C3の軸方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができる。
【0025】
なお、第3の運動軸C3の軸方向におけるツールセンタポイントVPの位置の具体的な調整は、前述の第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置の具体的な調整と同様に行う。
【0026】
以上により、各運動軸(第1の運動軸C1、第2の運動軸C2、及び第3の運動軸C3)の軸方向、換言すれば、異なる3方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができ、ツールセンタポイントVPの座標位置を実際のツールセンタポイントTPの座標位置に一致させるように調整することができる。
【0027】
従って、第1の実施形態によれば、各調整工程(第1の調整工程、第2の調整工程、及び第3の調整工程)における調整パラメータ(調整要素)は1つであるため、各調整工程の処理の複雑化を抑えることができる。また、各運動軸C1,C2,C3は任意の仮想軸であるため、各運動軸C1,C2,C3の選定の自由度が高くなって、ロボットアーム3の特異姿勢を容易に回避しつつ、各運動軸C1,C2,C3を特定運動させることができる。よって、ツールセンタポイントVPの座標位置の調整を短時間でかつ効率良く行うことができる。
【0028】
(第2の実施形態)
第2の実施形態について図7及び図8を参照して説明する。
【0029】
第2の実施形態に係るツールセンタポイント調整方法は、第1の実施形態に係るツールセンタポイント調整方法と同様に、ロボット制御装置9に記憶されたツールセンタポイントVPの座標位置を実際のツールセンタポイントTPの座標位置に一致させるように調整する方法であって、第1の調整工程、第2の調整工程、及び第3の調整工程を備えている。そして、第2の実施形態に係るツールセンタポイント調整方法については、第1の実施形態に係るツールセンタポイント調整方法と異なる点のみ説明する。
【0030】
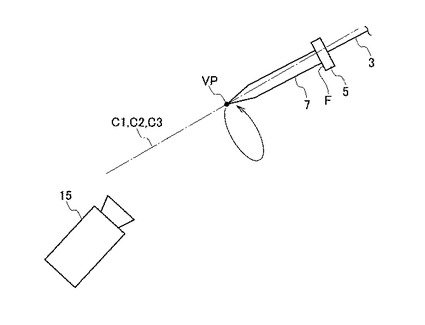
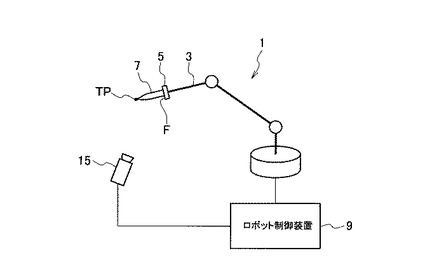
まず、第2の実施形態に係るツールセンタポイント調整方法は、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって各運動軸C1,C2,C3をツールセンタポイントVPを支点にして回転運動させるのではなく、図8に示すように、ロボットアーム3の下方に設置されたCCDカメラ等のカメラ15を用いて、カメラ15からの画像信号に基づいてロボット制御装置9によって各運動軸C1,C2,C3をツールセンタポイントVPを支点にして自動的に回転運動させるものである。
【0031】
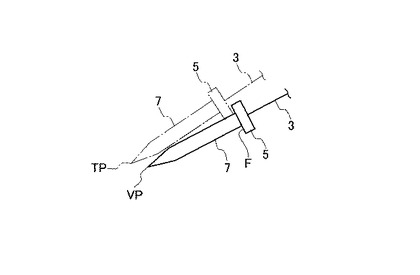
また、図7に示すように、各調整工程中において、各運動軸C1,C2,C3をツールセンタポイントVPを支点にして回転運動させる前に、ツールセンタポイントVPを各運動軸C1,C2,C3の回転運動を模擬した模擬運動をさせて、カメラ15に各運動軸C1,C2,C3の回転運動の基準位相(基準状態)を視認させるようにしており、実際のツールセンタポイントの停止を視認する主体はカメラ15である。そして、実際のツールセンタポイントTPの回転運動の位相と各運動軸C1,C2,C3の回転運動の基準位相が同じであるとカメラ15によって視認された場合には、ロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をオペレータ11側に調整する。一方、実際のツールセンタポイントTPの回転運動の位相と各運動軸C1,C2,C3の回転運動の基準位相が異なるとカメラ15によって視認された場合には、ロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をフランジ面F側に調整する。
【0032】
なお、第2の実施形態によれば、第1の実施形態による効果と同様の効果を奏するものである。
【0033】
本発明は、前述の実施形態の説明に限られるものではなく、例えば各運動軸C1,C2,C3を特定運動として円運動させる代わりに、別の特定運動として円弧運動、直線運動、円運動以外のループ運動等をさせる等、その他、種々の態様で実施可能である。また、本発明に包含される権利範囲は、これらの実施形態に限定されないものである。
【符号の説明】
【0034】
C1 第1の運動軸
C2 第2の運動軸
C3 第3の運動軸
F フランジ面
SA 仮想平面面
SB 仮想平面
TP 実際のツールセンタポイント
VP ツールセンタポイント
1 産業用ロボット
3 ロボットアーム
5 フランジ
7 ツール
9 ロボット制御装置
11 オペレータ
13 操作パネル
15 カメラ
【技術分野】
【0001】
本発明は、産業用ロボットを制御するロボット制御装置に記憶されたツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整するツールセンタポイント調整方法に関する。
【背景技術】
【0002】
ツールセンタポイント調整方法について種々の技術が開発されており、先行技術として特許文献1に示すものがある。そして、先行技術に係るツールセンタポイント調整方法について説明すると、次のようになる。
【0003】
即ち、産業用ロボットにおけるフランジ面のツール座標系の原点とツールセンタポイントを通る所定の仮想線を第1の回転軸として選定する。そして、第1の回転軸を中心としてツールセンタポイントを回転させ、実際のツールセンタポイントが第1の回転軸を中心として弧を描かなくなるまで、ツールセンタポイントの座標位置を調整する(第1の調整工程)。
【0004】
第1の調整工程の終了後に、ツールセンタポイントを通りかつツール座標系のZ軸と第1の回転軸を含む平面に垂直な所定の仮想線を第2の回転軸として選定する。そして、第2の回転軸を中心としてツールセンタポイントを回転させ、実際のツールセンタポイントが第2の回転軸を中心として弧を描かなくなるまで、ツールセンタポイントの座標位置を調整する(第2の調整工程)。
【0005】
以上により、ツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第265618号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、前述の先行技術に係るツールセンタポイント調整方法にあっては、各調整工程においてツールセンタポイントの座標位置を調整しており、換言すれば、各調整工程における調整パラメータ(調整要素)は2つであるため、各調整工程の処理が複雑化して、ツールセンタポイントの座標位置の調整に多くの時間を要するという問題がある。
【0008】
また、各回転軸は条件付けされた所定の仮想軸であるため、各回転軸の選定の自由度が低く、各回転軸を中心としてツールセンタポイントを回転させる際に、産業用ロボットにおけるロボットアームが特異姿勢になって、ツールセンタポイントの座標位置の調整が中断することがあるという問題がある。
【0009】
そこで、本発明は、前述の問題を解決することができる、新規な構成のツールセンタポイント調整方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の特徴は、産業用ロボットを制御するロボット制御装置に記憶されたツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整するツールセンタポイント調整方法において、前記ツールセンタポイントを通る任意の仮想軸を第1の運動軸として、前記第1の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第1の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第1の調整工程と、前記第1の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と異なる任意の仮想軸を第2の運動軸として、前記第2の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第2の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第2の調整工程と、前記第2の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と前記第2の運動軸を含む仮想平面に交わる任意の仮想軸を第3の運動軸として、前記第3の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第3の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第3の調整工程と、を備えたことを要旨とする。
【0011】
なお、座標位置とは、前記産業用ロボットにおけるフランジ面(フランジの面)のツール座標系の原点を基準とした位置のことであって、特定運動とは、円運動、円弧運動、直線運動、円運動以外のループ運動等を含む意である。
【0012】
本発明の特徴によると、各運動軸(前記第1の運動軸、前記第2の運動軸、及び前記第3の運動軸)の軸方向、換言すれば、異なる3方向における前記ツールセンタポイントの位置と前記実際のツールセンタポイントの位置を同じにすることができ、前記ツールセンタポイントの座標位置を前記実際のツールセンタポイントの座標位置に一致させるように調整することができる。
【発明の効果】
【0013】
本発明によれば、各調整工程(前記第1の調整工程、前記第2の調整工程、及び前記第3の調整工程)における調整パラメータ(調整要素)は1つであるため、各調整工程の処理の複雑化を抑えることができる。また、各運動軸は任意の仮想軸であるため、各運動軸の選定の自由度が高くなって、前記産業用ロボットにおけるロボットアームの特異姿勢を容易に回避しつつ、各運動軸を特定運動させることができる。よって、前記ツールセンタポイントの座標位置の調整を短時間でかつ効率良く行うことができる。
【図面の簡単な説明】
【0014】
【図1】第1の実施形態に係るツールセンタポイント調整方法における第1調整工程を説明する図である。
【図2】第1の実施形態に係るツールセンタポイント調整方法における第1調整工程を説明する図である。
【図3】第1の実施形態に係るツールセンタポイント調整方法における第2調整工程を説明する図である。
【図4】第1の実施形態に係るツールセンタポイント調整方法における第3調整工程を説明する図である。
【図5】ツールセンタポイントの座標位置を調整する前におけるツールセンタポイントと実際のツールセンタポイントの位置ずれを示す図である。
【図6】第1の実施形態に係る産業用ロボットの周辺構成を示す概略的な図である。
【図7】第2の実施形態に係るツールセンタポイント調整方法の特有の構成を説明する図である。
【図8】第2の実施形態に係る産業用ロボットの周辺構成を示す概略的な図である。
【発明を実施するための形態】
【0015】
(第1の実施形態)
第1の実施形態について図1から図6を参照して説明する。
【0016】
まず、第1の実施形態に係るツールセンタポイント調整方法について説明する前に、第1の実施形態に係る産業用ロボットの構成等について簡単に説明する。
【0017】
図6に示すように、第1の実施形態に係る産業用ロボット1は、多関節構造のロボットアーム3を備えており、このロボットアーム3の先端側のフランジ5には、ツール7が着脱可能に設けられている。また、産業用ロボット1の近傍には、産業用ロボット1の動作を制御するロボット制御装置9が配設されており、このロボット制御装置9には、オペレータ11の操作によって産業用ロボット1の動作を教示する操作パネル13が電気的に接続されている。
【0018】
続いて、第1の実施形態に係るツールセンタポイント調整方法について説明する。
【0019】
第1の実施形態に係るツールセンタポイント調整方法は、ロボット制御装置9に記憶されたツールセンタポイント(ツール7の先端位置)VP(図5参照)の座標位置を実際のツールセンタポイントTP(図5参照)の座標位置に一致させるように調整する方法であって、第1の調整工程、第2の調整工程、及び第3の調整工程を備えている。そして、各調整工程の具体的な内容は、次のようになる。なお、座標位置とは、産業用ロボット1におけるフランジ面F(フランジ5の面)のツール座標系の原点を基準とした位置のことである。
【0020】
(i)第1の調整工程
図1(a)に示すように、ツールセンタポイントVPを通る任意の仮想軸を第1の運動軸C1として選定する。そして、図1(b)に示すように、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第1の運動軸C1をツールセンタポイントVPを支点にして回転運動(特定運動の一例)させつつ、オペレータ11が実際のツールセンタポイントTPの停止を視認できるまで、第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置を調整する。
【0021】
具体的には、図2(a)に示すように、実際のツールセンタポイントTPの回転運動の位相と第1の運動軸C1の先端部分C1aの回転運動の位相が同じである(換言すれば、実際のツールセンタポイントTPの回転運動の位相とフランジ面Fの回転運動の位相が異なる)とオペレータ11が視認した場合には、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をオペレータ11側に調整する。一方、図2(b)に示すように、実際のツールセンタポイントTPの回転運動の位相と第1の運動軸C1の先端部分C1aの回転運動の位相が異なる(換言すれば、実際のツールセンタポイントTPの回転運動の位相とフランジ面Fの回転運動の位相が同じである)とオペレータ11が視認した場合には、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をフランジ面F側に調整する。これにより、第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができ、換言すれば、実際のツールセンタポイントTPをツールセンタポイントVPを通りかつ第1の運動軸C1に直交する仮想平面SA上に位置させることができる。なお、第1の運動軸C1を回転運動させる際に、第1の運動軸C1は軸心周りに回転させない。
【0022】
(ii)第2の調整工程
第1の調整工程の終了後に、図3に示すように、ツールセンタポイントVPを通りかつ第1の運動軸C1と異なる任意の仮想軸を第2の運動軸C2として選定する。そして、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第2の運動軸C2をツールセンタポイントVPを支点にして回転運動させつつ、オペレータ11が実際のツールセンタポイントTPの停止を視認できるまで、第2の運動軸C2の軸方向におけるツールセンタポイントVPの位置を調整する。これにより、第2の運動軸C2の軸方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができる。
【0023】
なお、第2の運動軸C2の軸方向におけるツールセンタポイントVPの位置の具体的な調整は、前述の第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置の具体的な調整と同様に行う。
【0024】
(iii)第3の調整工程
第2の調整工程の終了後に、図4に示すように、ツールセンタポイントVPを通りかつ第1の運動軸C1と第2の運動軸C2を含む仮想平面SBに交わる任意の仮想軸を第3の運動軸C3として設定する。そして、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって第3の運動軸C3をツールセンタポイントを支点にして回転運動させつつ、実際のツールセンタポイントTPの停止を視認できるまで、第3の運動軸C3の軸方向におけるツールセンタポイントVPの位置を調整する。これにより、第3の運動軸C3の軸方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができる。
【0025】
なお、第3の運動軸C3の軸方向におけるツールセンタポイントVPの位置の具体的な調整は、前述の第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置の具体的な調整と同様に行う。
【0026】
以上により、各運動軸(第1の運動軸C1、第2の運動軸C2、及び第3の運動軸C3)の軸方向、換言すれば、異なる3方向におけるツールセンタポイントVPの位置と実際のツールセンタポイントTPの位置を同じにすることができ、ツールセンタポイントVPの座標位置を実際のツールセンタポイントTPの座標位置に一致させるように調整することができる。
【0027】
従って、第1の実施形態によれば、各調整工程(第1の調整工程、第2の調整工程、及び第3の調整工程)における調整パラメータ(調整要素)は1つであるため、各調整工程の処理の複雑化を抑えることができる。また、各運動軸C1,C2,C3は任意の仮想軸であるため、各運動軸C1,C2,C3の選定の自由度が高くなって、ロボットアーム3の特異姿勢を容易に回避しつつ、各運動軸C1,C2,C3を特定運動させることができる。よって、ツールセンタポイントVPの座標位置の調整を短時間でかつ効率良く行うことができる。
【0028】
(第2の実施形態)
第2の実施形態について図7及び図8を参照して説明する。
【0029】
第2の実施形態に係るツールセンタポイント調整方法は、第1の実施形態に係るツールセンタポイント調整方法と同様に、ロボット制御装置9に記憶されたツールセンタポイントVPの座標位置を実際のツールセンタポイントTPの座標位置に一致させるように調整する方法であって、第1の調整工程、第2の調整工程、及び第3の調整工程を備えている。そして、第2の実施形態に係るツールセンタポイント調整方法については、第1の実施形態に係るツールセンタポイント調整方法と異なる点のみ説明する。
【0030】
まず、第2の実施形態に係るツールセンタポイント調整方法は、オペレータ11の操作パネル13の操作に基づきロボット制御装置9によって各運動軸C1,C2,C3をツールセンタポイントVPを支点にして回転運動させるのではなく、図8に示すように、ロボットアーム3の下方に設置されたCCDカメラ等のカメラ15を用いて、カメラ15からの画像信号に基づいてロボット制御装置9によって各運動軸C1,C2,C3をツールセンタポイントVPを支点にして自動的に回転運動させるものである。
【0031】
また、図7に示すように、各調整工程中において、各運動軸C1,C2,C3をツールセンタポイントVPを支点にして回転運動させる前に、ツールセンタポイントVPを各運動軸C1,C2,C3の回転運動を模擬した模擬運動をさせて、カメラ15に各運動軸C1,C2,C3の回転運動の基準位相(基準状態)を視認させるようにしており、実際のツールセンタポイントの停止を視認する主体はカメラ15である。そして、実際のツールセンタポイントTPの回転運動の位相と各運動軸C1,C2,C3の回転運動の基準位相が同じであるとカメラ15によって視認された場合には、ロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をオペレータ11側に調整する。一方、実際のツールセンタポイントTPの回転運動の位相と各運動軸C1,C2,C3の回転運動の基準位相が異なるとカメラ15によって視認された場合には、ロボット制御装置9によって第1の運動軸C1の軸方向におけるツールセンタポイントVPの位置をフランジ面F側に調整する。
【0032】
なお、第2の実施形態によれば、第1の実施形態による効果と同様の効果を奏するものである。
【0033】
本発明は、前述の実施形態の説明に限られるものではなく、例えば各運動軸C1,C2,C3を特定運動として円運動させる代わりに、別の特定運動として円弧運動、直線運動、円運動以外のループ運動等をさせる等、その他、種々の態様で実施可能である。また、本発明に包含される権利範囲は、これらの実施形態に限定されないものである。
【符号の説明】
【0034】
C1 第1の運動軸
C2 第2の運動軸
C3 第3の運動軸
F フランジ面
SA 仮想平面面
SB 仮想平面
TP 実際のツールセンタポイント
VP ツールセンタポイント
1 産業用ロボット
3 ロボットアーム
5 フランジ
7 ツール
9 ロボット制御装置
11 オペレータ
13 操作パネル
15 カメラ
【特許請求の範囲】
【請求項1】
産業用ロボットを制御するロボット制御装置に記憶されたツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整するツールセンタポイント調整方法において、
前記ツールセンタポイントを通る任意の仮想軸を第1の運動軸として、前記第1の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第1の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第1の調整工程と、
前記第1の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と異なる任意の仮想軸を第2の運動軸として、前記第2の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第2の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第2の調整工程と、
前記第2の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と前記第2の運動軸を含む仮想平面に交わる任意の仮想軸を第3の運動軸として、前記第3の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第3の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第3の調整工程と、を備えたことを特徴とするツールセンタポイント調整方法。
【請求項2】
前記実際のツールセンタポイントの停止を視認する主体がオペレータであることを特徴とする請求項1に記載のツールセンタポイント調整方法。
【請求項3】
前記実際のツールセンタポイントの停止を視認する主体がカメラであることを特徴とする請求項1に記載のツールセンタポイント調整方法。
【請求項4】
各調整工程中において、各運動軸を前記ツールセンタポイントを支点にして特定運動させる前に、前記ツールセンタポイントを各運動軸の特定運動を模擬した模擬運動をさせて、前記カメラに各運動軸の特定運動の基準位相を視認させることを特徴とする請求項3に記載のツールセンタポイント。
【請求項1】
産業用ロボットを制御するロボット制御装置に記憶されたツールセンタポイントの座標位置を実際のツールセンタポイントの座標位置に一致させるように調整するツールセンタポイント調整方法において、
前記ツールセンタポイントを通る任意の仮想軸を第1の運動軸として、前記第1の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第1の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第1の調整工程と、
前記第1の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と異なる任意の仮想軸を第2の運動軸として、前記第2の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第2の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第2の調整工程と、
前記第2の調整工程の終了後に、前記ツールセンタポイントを通りかつ前記第1の運動軸と前記第2の運動軸を含む仮想平面に交わる任意の仮想軸を第3の運動軸として、前記第3の運動軸を前記ツールセンタポイントを支点にして特定運動させつつ、前記実際のツールセンタポイントの停止を視認できるまで、前記第3の運動軸の軸方向における前記ツールセンタポイントの位置を調整する第3の調整工程と、を備えたことを特徴とするツールセンタポイント調整方法。
【請求項2】
前記実際のツールセンタポイントの停止を視認する主体がオペレータであることを特徴とする請求項1に記載のツールセンタポイント調整方法。
【請求項3】
前記実際のツールセンタポイントの停止を視認する主体がカメラであることを特徴とする請求項1に記載のツールセンタポイント調整方法。
【請求項4】
各調整工程中において、各運動軸を前記ツールセンタポイントを支点にして特定運動させる前に、前記ツールセンタポイントを各運動軸の特定運動を模擬した模擬運動をさせて、前記カメラに各運動軸の特定運動の基準位相を視認させることを特徴とする請求項3に記載のツールセンタポイント。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−240804(P2010−240804A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2009−94738(P2009−94738)
【出願日】平成21年4月9日(2009.4.9)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成21年4月9日(2009.4.9)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]