
テニスのスイング動作の分析装置、分析システム及び分析プログラム
【課題】ユーザによるテニスラケットのスイング動作に関連する指標をユーザが直感的に理解可能な態様で表示するGUIを提示する分析装置、分析システム及び分析プログラムを提供する。
【解決手段】本発明のテニスのスイング動作の分析装置は、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成する画面作成部とを備える。
【解決手段】本発明のテニスのスイング動作の分析装置は、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成する画面作成部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ユーザによるテニスラケットのスイング動作を分析する分析装置、分析システム及び分析プログラムに関する。
【背景技術】
【0002】
従来より、ユーザによるテニスラケットのスイング動作を改善したり、ユーザに適したテニスラケットを選択したりするのに役立てるべく、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータに基づいて、テニスラケットの速度等を分析する技術が公知である(特許文献1,2参照)。具体的には、特許文献1では、ユーザによりスイングされたラケットの速度を測定し、この測定値とともに、この測定値に応じて選択される、ユーザに適したラケットの候補をユーザに向けて表示部に表示する装置が開示されている。また、特許文献2では、スイングの速度の他、ラケットの軌道やラケット面の向き等を検出し、これらの検出値とともに、これらの検出値に応じて判断される、スイング動作の良し悪しや、スイング動作をどのように改善すべきか等の情報をユーザに向けて表示部に表示する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−263340号公報
【特許文献2】特開2009−125499号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1,2は、ラケットの速度等の値及びこれらの値から導出される各種情報の具体的な表示の方法については、特に言及していない。しかしながら、これらの情報は、テニスラケットのスイング動作を改善したり、ユーザに適したテニスラケットを選択したりするに当たり、ユーザが把握しておく価値のある情報である。従って、これらの情報をユーザが直感的に理解可能なGUI(グラフィカル・ユーザーインターフェース)を用意することが重要である。
【0005】
本発明は、ユーザによるテニスラケットのスイング動作に関連する指標をユーザが直感的に理解可能な態様で表示するGUIを提示する分析装置、分析システム及び分析プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1観点に係るテニスのスイング動作の分析装置は、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成する画面作成部とを備える。
【0007】
本発明の第2観点に係る分析装置は、第1観点に係る分析装置であって、前記GUI画面は、前記グラフ領域上に、前記複数の領域の境界を示すための補助線を表示する。
本発明の第3観点に係る分析装置は、第1観点又は第2観点に係る分析装置であって、前記GUI画面は、前記グラフ領域に含まれる前記複数の領域を異なる表示形式で表示する。
【0008】
本発明の第4観点に係る分析装置は、第1観点から第3観点のいずれかに係る分析装置であって、前記グラフ領域は、前記指標の第1方向の成分を第1軸とし、前記指標の前記第1方向と直交する第2方向の成分を前記第1軸と直交する第2軸とする領域である。
本発明の第5観点に係る分析装置は、第4観点に係る分析装置であって、前記指標は、前記テニスラケットの速度である。
【0009】
本発明の第6観点に係る分析装置は、第1観点から第5観点のいずれかに係る分析装置であって、前記算出部は、第1指標及び第2指標を含む複数の種類の前記指標を算出し、前記グラフ領域は、前記第1指標を第1軸とし、前記第2指標を前記第1軸と直交する第2軸とする領域である。
【0010】
本発明の第7観点に係る分析装置は、第1観点から第6観点のいずれかに係る分析装置であって、前記算出部は、前記スイング動作の単位毎に、前記指標を算出し、前記GUI画面は、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示する。
【0011】
本発明の第8観点に係る分析装置は、第7観に係る分析装置であって、前記取得部は、前記ユーザによる異なる前記テニスラケットの前記スイング動作をサンプリングした前記サンプリングデータを取得する。前記算出部は、前記サンプリングデータに基づいて、前記異なるテニスラケットに属する前記スイング動作の単位毎に、前記指標を算出する。
【0012】
本発明の第9観点に係るテニスのスイング動作の分析システムは、第1観点から第8観点のいずれかに記載の分析装置と、前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置とを備える。
【0013】
本発明の第10観点に係るテニスのスイング動作の分析装置は、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成する画面作成部とを備える。
【0014】
本発明の第11観点に係るテニスのスイング動作の分析システムは、第10観点に記載の分析装置と、前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置とを備える。
【0015】
本発明の第12観点に係るテニスのスイング動作の分析プログラムは、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成するステップとをコンピュータに実行させる。
【0016】
本発明の第13観点に係るテニスのスイング動作の分析プログラムは、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成するステップとをコンピュータに実行させる。
【発明の効果】
【0017】
本発明によれば、ユーザによるテニスラケットのスイング動作に関連する指標をユーザが直感的に理解可能な態様で表示するGUIを提示することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る分析システムの構成を示すブロック図である。
【図2】計測デバイスの構成を示す図である。
【図3】テニスコートを示す斜視図である。
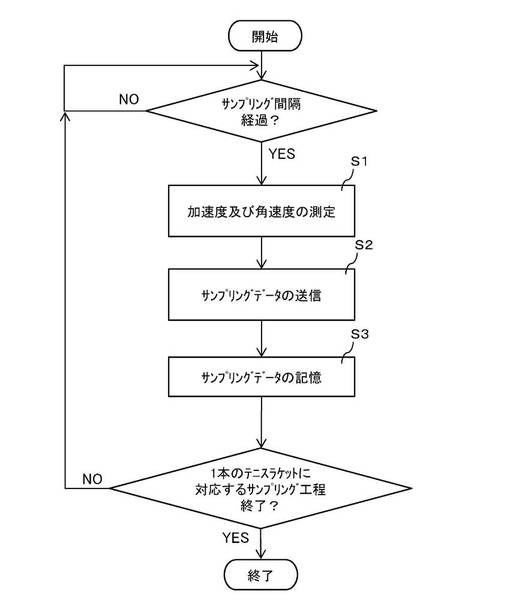
【図4】スイング動作のサンプリング工程の処理の流れを示すフローチャートである。
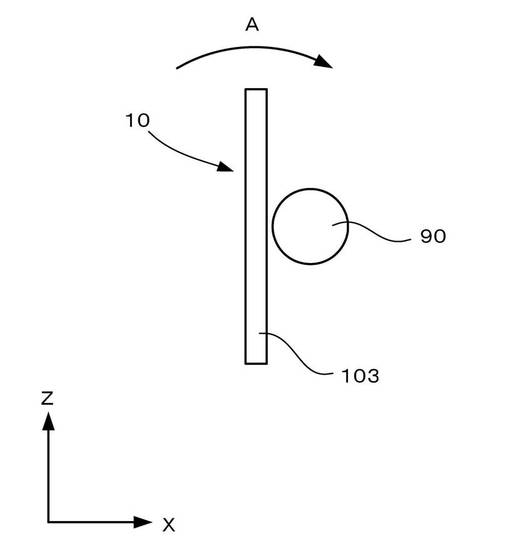
【図5】ラケット角速度の計測に供されるテニスラケットがテニスボールとともに示された図である。
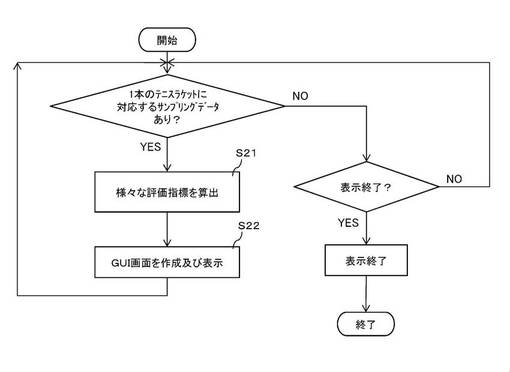
【図6】評価指標の算出工程及びGUI画面の作成工程の処理の流れを示すフローチャートである。
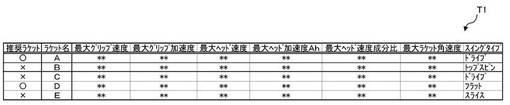
【図7】様々な評価指標の一覧表を示す図。
【図8】スイング軌道のグラフを示す図。
【図9】最大ヘッド速度成分比のグラフを示す図。
【図10】最大ヘッド速度成分比のバラツキを示すグラフを示す図。
【図11】最大ヘッド速度成分比のバラツキを示すグラフを示す別の図。
【図12】最大ヘッド速度成分比のバラツキを示すグラフを示す別の図。
【図13】最大ヘッド速度成分比のバラツキを示すグラフを示す別の図。
【図14】最大ラケット角速度のグラフを示す図。
【発明を実施するための形態】
【0019】
以下、図面を参照しつつ、本発明の一実施形態に係るユーザによるテニスラケットのスイング動作を分析する分析装置、分析システム及び分析プログラムについて説明する。
【0020】
<1.分析システムの構成>
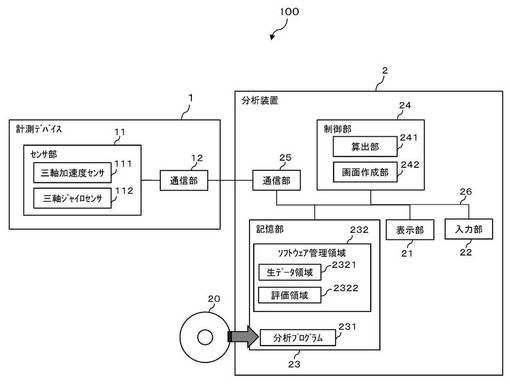
図1に示すとおり、本発明の一実施形態に係る分析システム100は、ユーザによるテニスラケット10のスイング動作をサンプリングする計測デバイス1と、計測デバイス1から送られてくるサンプリングデータに基づいて、ユーザによるテニスラケット10のスイング動作を分析する分析装置2とを備えている。分析装置2は、ユーザによるテニスラケット10のスイング動作を分析することにより、主として、ユーザがテニスラケット10のフィッティングを行うのを支援すべく、スイング動作に関連する評価指標をユーザが直感的に理解可能な態様で表示するGUI画面を提示する。すなわち、分析システム1は、ユーザが様々なテニスラケット10の中から自分に適したテニスラケット10を選択するのを支援するためのシステムであり、主として、テニスラケット10の販売を行うテニス用品店や、テニススクール等に導入される。なお、「スイング」という用語には、グラウンドストロークのみならず、ボレーやサーブ等、テニスラケット10を振る任意の行為が含まれる。グラウンドストロークとは、一度テニスコートの地面でバウンドしたテニスボールを打撃することをいう。
【0021】
<1−1.計測デバイス>
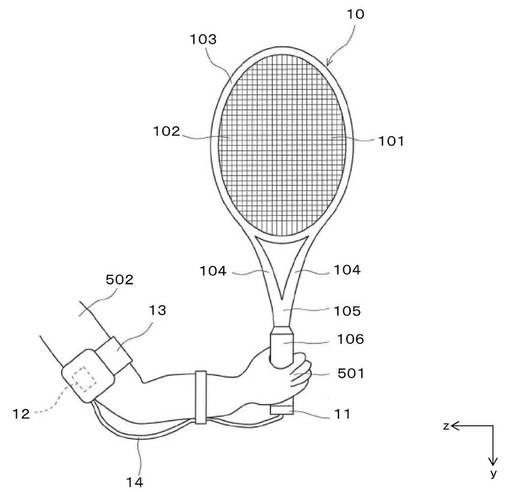
まず、計測デバイス1について、図2も参照しつつ説明する。図2に示すように、この計測デバイス1は、テニスラケット10に取り付けられるセンサ部11と、このセンサ部11でサンプリングされる計測データ(サンプリングデータ)を分析装置2に送信するための通信部12とを備えている。ここで用いられるテニスラケット10は、一般的なものではあるが、縦横にガット101が張り渡されてフェース102が形成されたヘッド103を有しており、このヘッド103の一端から左右一対のスロート104が延びて一本のシャフト105に連結されている。また、シャフト105には、プレーヤーが把持するグリップ106が連結されている。
【0022】
そして、計測デバイス1のセンサ部11は、スイング動作の妨げにならないようにグリップ106の端部に取り付けられ、通信部12はグリップ106を把持する手501の上腕502に取り付けられる(図2の例では右手)。センサ部11には、三軸加速度センサ111及び三軸ジャイロセンサ112が内蔵されており、それぞれラケット10を基準とした相対座標(x、y、z)におけるグリップ106の加速度及び角速度が計測される。ここで、xyz相対座標系について説明すると、ラケット10のシャフト105の長手方向が、y軸の方向と一致している。y軸の方向は、フェース102と平行でもある。そして、ヘッド103からグリップ106に向かう方向が、y軸の正の方向である。z軸の方向も、フェース102に平行であるが、z軸は、y軸と直交しており、図2に示されたフェース102が時計の文字盤とみなされたとき、3時の位置から9時の位置へ向かう方向が、z軸の正の方向である。また、図2には示されていないが、x軸の方向は、y軸及びz軸と直交しており、フェース102に対して垂直である。また、ヘッド103の厚み方向における、裏側から表側に向かう方向が、x軸の正の方向である。表側は、フォアハンドのストロークのときにテニスボールと接触する側である。このように規定されたx軸、y軸及びz軸は、ラケット10を基準とした相対軸であり、x軸、y軸及びz軸の方向は、ラケット10の姿勢に応じて変動する。
【0023】
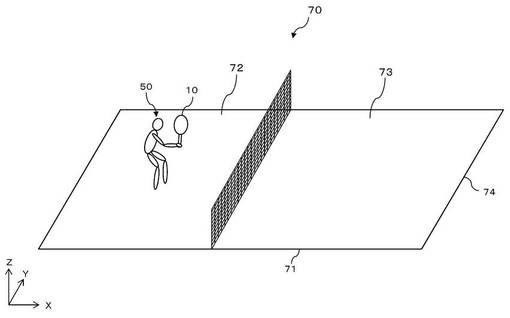
ところで、正面から飛んでくるテニスボールを打ち返すテニスラケット10のスイング動作を分析するためには、分析の対象となるラケット10の速度等の評価指標は、テニスコート等の固定された地面及び空間を基準としたものである必要がある。すなわち、ラケット10の速度等は、上述の相対座標(x,y,z)ではなく、固定された地面及び空間を基準とした絶対座標(X,Y,Z)に基づくべきである。そのため、本実施形態では、テニスコートを基準としたXYZ絶対座標系も規定されている。図3は、分析システム100が導入されるテニスコート70が示された斜視図である。図3には、スイング動作を行うプレーヤー50が示されている。このプレーヤー50は、右利きであり、右手501でラケット10を握っている。
【0024】
図3に示されるように、テニスコート70のサイドライン71の方向は、X軸の方向と一致している。プレーヤー50にとっての自陣72から相手陣73に向かう方向が、X軸の正の方向である。テニスコート70のエンドライン74の方向は、Y軸の方向と一致しており、相手陣73を向いたプレーヤー50にとっての右から左に向かう方向が、Y軸の正の方向である。また、Z軸の方向は、鉛直方向であり、上向きの方向が、Z軸の正の方向である。このX軸、Y軸及びZ軸は、テニスコート70が基準とされた絶対軸である。
【0025】
図1及び図2に戻って、計測デバイス1の説明を続ける。図2に示されるように、通信部12は、プレーヤー50のスイング動作の妨げとならないように、バンド13によって上腕502に固定されている。センサ部11と通信部12とは、ケーブル14によって接続されており、これにより、通信部12は、三軸加速度センサ111及び三軸ジャイロセンサ112での計測データを、ケーブル14を通じてセンサ部11から受け取る。通信部12は、このサンプリングデータを、分析装置2に向けて無線送信するが、その通信方式は、種々のものを適用可能である。例えば、いわゆるブルートゥース(BlueTooth:登録商標)方式、UWB(Ultra Wide Band)方式、無線LAN(Local Area Network)などによる近距離無線通信などを利用することができる。なお、センサ部11及び通信部12を駆動させるためのバッテリー(図示されず)も、バンド13によって上腕502に固定されている。
【0026】
<1−2.分析装置>
続いて、分析装置2について説明する。分析装置2は、CD−ROM、DVD−ROM、ブルーレイディスク、USBメモリ等のコンピュータで読み取り可能な記録媒体20に格納された分析プログラム231を汎用のパーソナルコンピュータにインストールすることにより製造される。分析プログラム231は、計測システム1から送られてくるサンプリングデータを加工することにより後述するGUI画面を作成し、これを表示部21に表示させるためのソフトウェアである。分析プログラム231は、分析装置2に後述する動作を実行させる。
【0027】
分析装置2は、表示部21、入力部22、記憶部23、制御部24、及び通信部25を有している。そして、これらは、互いにバス線26で接続されており、相互に通信可能である。本実施形態では、表示部21を、液晶ディスプレイ等で構成することができ、後述する画面等をプレーヤー50や分析装置2のオペレータに対し表示するユーザーインターフェースである。また、入力部22は、マウス、キーボード、タッチパネル等で構成することができ、分析装置2に対するユーザからの操作を受け付けるユーザーインターフェースである。
【0028】
記憶部23は、ハードディスク等の記憶装置から構成され、分析プログラム231が格納されているほか、ソフトウェア管理領域232が確保されている。ソフトウェア管理領域232は、分析プログラム231が使用する領域である。ソフトウェア管理領域232内には、生データ領域2321及び評価領域2322が確保されている。各領域2321,2322の役割については、後述する。
【0029】
また、制御部24は、CPU、ROMおよびRAM等から構成することができる。制御部24は、記憶部23内に格納されている分析プログラム231を読み出して実行することにより、図1に示すように、仮想的に算出部241及び画面作成部242として動作する。各部241,242の動作については、後述する。
【0030】
また、通信部25は、計測デバイス1の通信部12からデータを受信するほか、USBメモリなどの外部記憶装置からのデータを受け取る通信インターフェースとしても機能する。その他、必要に応じて、プリンタ、プロッタ等を接続することができる。
【0031】
<2.分析方法>
続いて、分析システム100による、主としてテニスラケット10のフィッティングのためのスイング動作の分析処理について説明する。本実施形態に係る分析処理は、3つの工程から構成されている。すなわち、計測デバイス1によりラケット10の加速度及び角速度の計測値をサンプリングするサンプリング工程、サンプリング工程によるサンプリングデータに基づいて、分析装置2によりスイング動作の評価指標を算出する算出工程、分析装置2により評価指標をグラフ表示するGUI画面を作成する画面作成工程の3つの工程である。以下、これらの工程を順に説明する。
【0032】
<2−1.サンプリング工程>
まず、サンプリング工程について説明すると、自分に適したテニスラケット10を探しているユーザ自身が、プレーヤー50としてテニスコート70に配置される。そして、このプレーヤー50に対し、相手陣73に配置されたもう一人のプレーヤー又はテニスボールマシーンからテニスボールが連続的に供給される。なお、プレーヤー50に対するボールの供給は、一定方向かつ一定速度とされることが好ましい。プレーヤー50は、ボールを相手陣73に打ち返すように心がけながら、手に持ったラケット10をスイングして、飛んできたボールを連続的に打ち返す。すなわち、分析システム100による分析の対象となるプレーヤー50のスイング動作は、いわゆる素振りではない。
【0033】
そして、プレーヤー50が上述のスイング動作を行っている間、計測デバイス1により、テニスラケット10のグリップ11の加速度及び角速度が計測される。具体的には、図4に示すとおり、所定のサンプリング間隔で、三軸加速度センサ111が、xyz相対座標系におけるグリップ11の加速度のx軸、y軸及びz軸成分であるA(gx),A(gy)及びA(gz)を計測するとともに、三軸ジャイロセンサ112が、グリップ11の角速度のx軸、y軸及びz軸成分であるω(gx),ω(gy)及びω(gz)を計測する(ステップS1)。サンプリング間隔は、特に限定されないが、例えば、1/1000〜1/500秒毎に、データを得ることができる。こうして計測されたグリップ加速度A(gx),A(gy)及びA(gz)並びにグリップ角速度ω(gx),ω(gy)及びω(gz)のデータは、通信部12から、分析装置2の通信部25へと、刻々と送信される(ステップS2)。また、こうして送信されたデータは、制御部24により、記憶部23の生データ領域2321に記憶される(ステップS3)。
【0034】
なお、上述のスイング動作は、通常、候補となる異なる種類の複数のラケット10に対し、繰り返し行われる。ここでいう異なる種類のラケット10とは、例えば、フレームの大きさや質量等が異なるラケット10や、ガット101の種類が異なるラケット10等である。本実施形態では、各ラケット10に対し、所定のサンプル数(例えば、5)ずつスイング動作が行われ、所定のサンプル数のスイング動作分のグリップ加速度A(gx),A(gy)及びA(gz)並びにグリップ角速度ω(gx),ω(gy)及びω(gz)のデータがサンプリングされる。これは、同じラケット10での複数回のスイング動作に関するデータを平均化することにより、ユーザとそのラケット10との相性を正確に評価するためである。また、これにより、特定のラケット10でのスイング動作の安定性を評価することも可能になる。従って、サンプル数は、例えば、3〜10回程度であることが好ましい。なお、本実施形態では、打撃したボールが相手陣73に入らなかったときは、当該スイング動作はサンプル数のカウントから外され、その後の分析の対象とならない。同様に、打撃したテニスボールが相手陣52に入ったとしても、明らかなミスショットであれば、当該スイング動作はサンプル数のカウントから外され、その後の分析の対象とならない。
【0035】
制御部24は、1本のラケット10に対応する所定のサンプル数のスイング動作の開始及び終了のタイミングを判断し、センサ部11から送信されてくるサンプリングデータをラケット10毎に区別して、生データ領域2321に格納する。分析装置2においては、1本のラケット10に対応するサンプリングデータが、スイング動作の分析単位となるからである。なお、図4の処理は、1本のラケット10に対応するスイング動作が開始するタイミングで開始し、これが終了するタイミングで終了する。すなわち、図4の処理は、スイング動作の分析単位毎に、繰り返し実行される。なお、分析装置2が1本のラケット10に対応するスイング動作の開始及び終了のタイミングを判断する方法は、特に限定されないが、例えば、オペレータが入力部22を介して開始/終了のタイミングを入力する方法が考えられる。なお、ここでいうオペレータとは、プレーヤー50自身であってもよいし、テニス用品店の店員や、テニススクールのコーチ等であってもよい。なお、サンプリングデータは、計測されるにつれてセンサ部11から刻々と分析装置2へ送信されるのではなく、センサ部11に設けられている所定の記憶部内に一時保存しておき、1本又は複数本のラケット10に対応するスイング動作が終了した段階でまとめて分析装置2へ送信するようにしてもよい。
【0036】
<2−2.評価指標の算出工程>
続いて、評価指標の算出工程について説明する。制御部24の算出部241は、1本のラケット10に対応するサンプリング工程が終了する度に、記憶部23の生データ領域2321に記憶されているグリップ加速度A(gx),A(gy)及びA(gz)並びにグリップ角速度ω(gx),ω(gy)及びω(gz)のデータの全て又は一部を参照することにより、スイング動作の評価指標を算出する。ここでいう評価指標とは、テニスラケット10の速度、加速度、角速度又は位置、或いはこれらの値を任意に組み合わせて定義される変数であり、定量的に表されるものであってもよいし、「大」「中」「小」等、定性的に表されるものであってもよい。また、「任意の組み合わせ」とは、係数の掛け合わせや1又は複数回の加減乗除等の演算を行いながら、任意の態様で物理量を組み合わせることを意味する。すなわち、評価指標とは、スイング動作時のテニスラケット10の挙動を示す物理量を用いて定義される変数であると考えることもできる。本実施形態における評価指標は、XYZ絶対座標系におけるグリップ加速度、グリップ速度、ヘッド速度、ヘッド加速度、ヘッド速度成分比及びスイング軌道、並びにxyz相対座標系におけるラケット角速度である。以下、各評価指標について説明する。
【0037】
[グリップ加速度]
XYZ絶対座標系におけるグリップ加速度は、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、並びにxyz相対座標系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)のデータに基づいて算出される。より具体的には、算出部241により、時刻毎のグリップ加速度A(gx),A(gy)及びA(gz)が、時刻毎のグリップ角速度ω(gx),ω(gy)及びω(gz)に基づいて、時刻毎のグリップ加速度のX軸、Y軸及びZ軸成分であるA(gX),A(gY)及びA(gZ)に変換される。変換に用いられるクォータニオンは、下記数式によって表される。
Q=[cos(θ);ω(gx)/θ*sin(θ/2),ω(gy)/θ*sin(θ/2),ω(gz)/θ*sin(θ/2)]
R=[cos(θ);-ω(gx)/θ*sin(θ/2),-ω(gy)/θ*sin(θ/2),-ω(gz)/θ*sin(θ/2)]
上記数式におけるθは、下記数式によって求められる。
θ=SQRT(ω(gx)2+ω(gy)2+ω(gz)2)
【0038】
続いて、算出部241により、XYZ絶対座標系における時刻毎のグリップ加速度A(gX),A(gY)及びA(gZ)から、XYZ絶対座標系における時刻毎のグリップ加速度の大きさA(g)が算出される。算出は、下記数式に基づいてなされる。
A(g)=SQRT(A(gx)2+A(gy)2+A(gz)2)
【0039】
そして、算出部241は、この時刻毎のグリップ加速度の大きさA(g)の中から、後述するヘッド速度の大きさV(h)が最大となる時刻のものを、最大グリップ加速度AA(g)として選択する。そして、算出部241は、時刻毎のグリップ加速度A(gX),A(gY)及びA(gZ)、時刻毎のグリップ加速度の大きさA(g)、及び最大グリップ加速度AA(g)を評価指標として評価領域2322に記憶する。
【0040】
[グリップ速度]
XYZ絶対座標系におけるグリップ速度は、XYZ絶対座標系におけるグリップ加速度A(gX),A(gY)及びA(gZ)のデータに基づいて算出される。より具体的には、算出部241により、時刻毎のグリップ速度のX軸、Y軸及びZ軸成分であるV(gX)、V(gY)及びV(gZ)が、下記数式に基づいて算出される。
ΔV(gX)=A(gX)*ΔT
ΔV(gY)=A(gY)*ΔT
ΔV(gZ)=A(gZ)*ΔT
上記数式において、ΔTは、微小時間(上述のサンプリング間隔)であり、ΔV(gX)、ΔV(gY)及びΔV(gZ)は、微小時間ΔTにおけるV(gX)、V(gY)及びV(gZ)の増分である。ΔTの値は、オペレータにより分析装置2に適宜入力される。
【0041】
続いて、算出部241により、XYZ絶対座標系における時刻毎のグリップ速度V(gX)、V(gY)及びV(gZ)から、XYZ絶対座標系における時刻毎のグリップ速度V(g)の大きさが算出される。算出は、下記数式に基づいてなされる。
V(g)=SQRT(V(gX)2+V(gY)2+V(gZ)2)
【0042】
そして、算出部241は、この時刻毎のグリップ速度の大きさV(g)の中から、後述するヘッド速度の大きさV(h)が最大となる時刻のものを、最大グリップ速度VV(g)として選択する。そして、算出部241は、時刻毎のグリップ速度V(gX)、V(gY)及びV(gZ)、時刻毎のグリップ速度の大きさV(g)、及び最大グリップ速度VV(g)を評価指標として評価領域2322に記憶する。
【0043】
[ヘッド速度]
XYZ絶対座標系におけるヘッド速度は、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、xyz相対座標軸系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)、並びにラケット長のデータに基づいて算出される。ラケット長のデータは、オペレータにより分析装置2に適宜入力される。具体的には、まず、算出部241が、前述の数式により、XYZ絶対座標系における時刻毎のグリップ速度V(gX)、V(gY)及びV(gZ)を算出する。一方、前述のクォータニオンから、算出部241が回転行列RMを算出する。算出部241はさらに、XYZ絶対座標系における時刻毎の回転による速度ベクトルVrを、下記数式に基づいて算出する。
Vr=cross(ω,tV)*RM
この数式において、cross(ω,tV)は、xyz相対座標系における時刻毎の角速度ベクトルωとラケット長ベクトルtVとの外積である。
【0044】
続いて、算出部241により、時刻毎のヘッド速度のX軸、Y軸及びZ軸成分であるV(hX),V(hY)及びV(hZ)が、下記数式によって算出される。
V(hX)=V(gX)+Vr(X)
V(hY)=V(gY)+Vr(Y)
V(hZ)=V(gZ)+Vr(Z)
【0045】
続いて、算出部241により、XYZ絶対座標系における時刻毎のヘッド速度V(hX),V(hY)及びV(hZ)から、XYZ絶対座標系における時刻毎のヘッド速度の大きさV(h)が算出される。算出は、下記数式に基づいてなされる。
V(h)=SQRT(V(hX)2+V(hY)2+V(hZ)2)
【0046】
そして、算出部241は、この時刻毎のヘッド速度の大きさV(h)の中から最大のものを、最大ヘッド速度VV(h)として選択する。そして、算出部241は、時刻毎のヘッド速度V(hX)、V(hY)及びV(hZ)、時刻毎のヘッド速度の大きさV(h)、及び最大ヘッド速度VV(h)を評価指標として評価領域2322に記憶する。なお、スイング動作の開始以降、ヘッド速度は徐々に上昇するが、テニスラケット10とテニスボールとのインパクトによって急激に減速する。従って、最大ヘッド速度VV(h)が得られる時刻は、インパクトの直前の時刻であり、プレーヤー50とラケット10との相性を判定するのに適した時刻と考えられる。なお、絶対座標系におけるヘッド速度は、相対座標系におけるグリップ速度及びグリップ角速度の計測値に基づいて算出されるが、センサ部11をヘッド103の先端に取り付けて相対座標系におけるヘッド加速度を計測し、このヘッド加速度を絶対座標系に変換した値から絶対座標系におけるヘッド速度を求めることもできる。
【0047】
[ヘッド加速度]
XYZ絶対座標系におけるヘッド加速度は、XYZ絶対座標系におけるヘッド速度V(hX),V(hY)及びV(hZ)に基づいて算出される。より具体的には、算出部241は、時刻毎のヘッド速度のX軸、Y軸及びZ軸成分であるV(hX),V(hY)及びV(hZ)をそれぞれ時間で微分することにより、時刻毎のヘッド加速度のX軸、Y軸及びZ軸成分であるA(hX)、A(hY)及びA(hZ)を算出する。
【0048】
続いて、算出部241により、XYZ絶対座標系における時刻毎のヘッド加速度A(hX)、A(hY)及びA(hZ)から、XYZ絶対座標系における時刻毎のヘッド加速度の大きさA(h)が算出される。算出は、下記数式に基づいてなされる。
A(h)=SQRT(A(hX)2+A(hY)2+A(hZ)2)
【0049】
そして、算出部241は、この時刻毎のヘッド加速度の大きさA(h)の中から、ヘッド速度の大きさV(h)が最大となる時刻(インパクト直前)のものを、最大ヘッド加速度AA(h)として選択する。そして、算出部241は、時刻毎のヘッド加速度A(hX)、A(hY)及びA(hZ)、時刻毎のヘッド加速度の大きさA(h)、及び最大ヘッド加速度AA(h)を評価指標として評価領域2322に記憶する。なお、絶対座標系におけるヘッド加速度は、相対座標系におけるグリップ速度及びグリップ角速度の計測値に基づいて算出されるが、センサ部11をヘッド103の先端に取り付けて相対座標系におけるヘッド加速度を計測し、このヘッド加速度を絶対座標系に変換することもできる。
[ヘッド速度成分比]
XYZ絶対座標系におけるヘッド速度成分比Iは、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、xyz相対座標軸系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)、並びにラケット長のデータに基づいて算出される。具体的には、まず、算出部241が、前述の数式により、XYZ絶対座標系における時刻毎のヘッド速度のX軸及びZ軸成分であるV(hX)及びV(hZ)を算出する。続いて、算出部241は、XYZ絶対座標系における時刻毎のヘッド速度成分比Iを下記数式に基づいて算出する。
I=V(hZ)/V(hX)
【0050】
そして、算出部241は、この時刻毎のヘッド速度成分比Iの中から、ヘッド速度の大きさV(h)が最大となる時刻(インパクト直前)のものを、最大ヘッド速度成分比IIとして選択する。そして、算出部241は、時刻毎のヘッド速度成分比I、及び最大ヘッド加速度IIを評価指標として評価領域2322に記憶する。なお、ヘッド速度成分比は、相対座標系におけるグリップ速度及びグリップ角速度の計測値に基づいて算出されるが、センサ部11をヘッド103の先端に取り付けて相対座標系におけるヘッド加速度を計測し、このヘッド加速度を絶対座標系に変換した値からヘッド速度成分比Iを求めることもできる。
【0051】
[スイング軌道]
XYZ絶対座標系におけるスイング軌道は、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、xyz相対座標軸系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)、並びにラケット長のデータに基づいて算出される。具体的には、まず、算出部241が、前述の数式により、XYZ絶対座標系における時刻毎のグリップ速度V(gX),V(gY)及びV(gZ)を算出する。続いて、算出部241は、このグリップ速度V(gX),V(gY)及びV(gZ)から、下記数式に基づいて、時刻毎のグリップ11の位置のX軸、Y軸及びZ軸成分であるP(gX),P(gY)及びP(gZ)を算出する。
ΔP(gX)=V(gX)*ΔT
ΔP(gY)=V(gY)*ΔT
ΔP(gZ)=V(gZ)*ΔT
上記数式において、ΔTは、微小時間(上述のサンプリング間隔)であり、ΔP(gX),ΔP(gY)及びΔP(gZ)は、微小時間ΔTにおけるP(gX),P(gY)及びP(gZ)の増分である。
【0052】
また、算出部241は、グリップ11に対する時刻毎のヘッド103のトップの相対位置P(h)を、下記数式によって算出する。
P(h)=tV*RM
上記数式において、tVは前述のラケット長ベクトルであり、RMは前述の回転行列である。算出部241は、下記数式により、時刻毎のヘッド103のトップの絶対座標(Xt,Yt,Zt)を算出し、評価指標として評価領域2322に記憶する。時刻毎の絶対座標(Xt,Yt,Zt)は、ラケット12の軌道を意味している。
(Xt,Yt,Zt)=P(g)+P(h)
【0053】
算出部241は、時刻toからtまでの絶対座標軸X方向のヘッド103の移動距離JXを、下記数式によって算出する。
JX=(Xt−Xto)
算出部241は、時刻toからtまでの絶対座標軸Y方向のヘッド103の移動距離JYを、下記数式によって算出する。
JY=(Yt−Yto)
算出部241は、時刻toからtまでの絶対座標軸Z方向のヘッド103の移動距離JZを、下記数式によって算出する。
JZ=(Zt−Zto)
移動距離JX,JY及びJZは、評価指標として評価領域2322に記憶される。
【0054】
様々な時間帯における移動距離JX,JY及びJZが算出され得る。例えば、インパクトのt秒前と、インパクトとの間の移動距離JX,JY及びJZが算出され得る。また、インパクトと、インパクトからt秒後との間の移動距離JX,JY及びJZが算出され得る。
【0055】
[ラケット角速度]
xyz相対座標系におけるラケット角速度は、三軸ジャイロセンサ112の計測値である、y軸の回りのグリップ角速度ω(gy)である。
図5には、サンプリング工程におけるテニスラケット10が示されている。図5には、相対座標軸yの方向に沿って見たヘッド103が示されている。図5には、ラケット10とインパクトする直前のテニスボール90も示されている。この図において矢印Aで示されているのは、ヘッド103の回転方向である。この回転の角速度が、前述のグリップ角速度ω(gy)である。時刻毎のグリップ角速度ω(gy)は、評価指標である時刻毎のラケット角速度として評価領域2322に記憶される。また、算出部241は、この時刻毎のグリップ角速度ω(gy)の中から、ヘッド速度の大きさV(h)が最大となる時刻のものを、最大ラケット角速度ωωとして選択し、評価指標として評価領域2322に記憶する。
【0056】
なお、既に述べたとおり、サンプリング工程では、各ラケット10に対し、所定のサンプル数のスイング動作が行われる。従って、サンプル数が複数である場合には、上述の各評価指標も、各ラケット10に対し、複数個ずつ算出されることになる。この場合には、算出部241は、ラケット10単位で、評価指標の種類毎に複数個の評価指標を平均化し、これらの平均値も評価指標として評価領域2322に記憶する。
【0057】
<2−3.GUI画面の作成工程>
続いて、GUI画面の作成工程について、上述の評価指標の算出工程を含め、図6を参照しつつ説明する。図6に示す処理は、最初の1本のラケット10に対応するサンプリング工程が終了したタイミングで開始する。
【0058】
まず、制御部24の画面作成部242は、ステップS21として、1本のラケット10に対応するサンプリングデータに基づいて、上述の様々な評価指標を算出する。
続いて、画面作成部242は、ステップS22として、ステップS21で算出された後、評価領域2322に記憶されている様々な評価指標をそのままで、或いは適宜加工したものを、表形式やグラフ形式等の様々な形式で表示するGUI画面を作成し、表示部21上に表示させる。GUI画面に表示される各種項目の例については、後述する。
【0059】
図6に示すとおり、上述のステップS21,S22は、オペレータにより入力部20を介してGUI画面の表示の終了の命令が入力されるまで、各ラケット10に対応するサンプリングデータに対し、繰り返し実行される。一方、オペレータにより入力部20を介してGUI画面の表示の終了の命令が入力をされると、制御部21は、表示部21上におけるGUI画面の表示を終了し、図6に示す処理を終了させる。これにより、スイング動作の分析処理も、終了する。
【0060】
なお、最初の1本のラケット10に対応するサンプリングデータに対するステップS22が実行された直後のGUI画面は、ラケット10の1本分のサンプリングデータに対応する様々な評価指標が表形式やグラフ形式で表示されたものである。そして、その後、ステップS22が繰り返される度に、表示部21上のGUI画面は、新たな画面へと更新される。すなわち、GUI画面が更新される度に、GUI画面上では、後述する一覧表T1内の行データが増え、後述するグラフ領域G1,G2上にプロットされる太線が増え、後述するグラフ領域G3自体が増え、さらに、後述するグラフ領域G4上にプロットされる点も増えてゆくことになる。従って、1本のラケット10のスイング動作のみをサンプリングした場合には、後述する一覧表T1内の行は1行となり、後述するグラフ領域G1,G2上にプロットされる太線は1本のみとなり、後述するグラフ領域G3も1つだけとなり、グラフ領域G4上にプロットされる点も1つのみとなる。このように、1本のラケット10に対するスイング動作のみをサンプリングすることは、特定のラケット(例えば、マイラケット)によるプレーヤー50のスイング動作を分析し、これを改善してゆくのに役立つ。
【0061】
<3.GUI画面上の各種項目>
以下、GUI画面上に表示される各種項目について説明する。
<3−1.評価指標の一覧表>
画面作成部242は、評価領域232内に記憶されている評価指標を適宜参照することにより、GUI画面上に図7に示す一覧表T1を表示させる。一覧表T1には、最大グリップ速度VV(g)、最大グリップ加速度AA(g)、最大ヘッド速度VV(h)、最大ヘッド加速度AA(h)、最大ヘッド速度成分比II、及び最大ラケット角速度ωωを表示する欄が設けられている。上記したとおり、これらの各評価指標は、各ラケット10に対しサンプル数ずつ導出されるが、一覧表T1内では、これらの平均値が表示される。
【0062】
ここで、最大グリップ速度VV(g)が大きいことは、プレーヤー50の腕の力みや手の緩みが少ないことを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大グリップ速度VV(g)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大グリップ速度VV(g)が基準ラケットの最大グリップ速度Vgよりも大きくなるラケット10が、プレーヤー50に推奨される。基準ラケットは、例えば、プレーヤー50が日頃使用しているラケットである。従って、プレーヤー50によるスイング動作の計測時に使用される複数のテニスラケット10(以下、対象ラケット群という)の1つをマイラケットとしておけば、新しいラケット10を現在のマイラケットとの比較により選択することが可能になる。GUI画面上に表示されるその他の項目についても、同様である。
【0063】
また、最大グリップ加速度AA(g)が大きいことは、プレーヤー50の腕の力みや手の緩みが少なく、しかも、テニスボールに強い打撃を与え得ることを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大グリップ加速度AA(g)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大グリップ加速度AA(g)が基準ラケットの最大グリップ加速度AA(g)よりも大きくなるラケット10が、プレーヤー50に推奨される。
【0064】
また、最大ヘッド速度VV(h)が大きいことは、プレーヤー50がテニスボールを強く打撃できていることを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大ヘッド速度VV(h)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大ヘッド速度VV(h)が基準ラケットの最大ヘッド速度VV(h)よりも大きくなるラケット10が、プレーヤー50に推奨される。
【0065】
また、最大ヘッド加速度AA(h)が大きいことは、プレーヤー50がテニスボールにより大きい運動エネルギーを与え、強く打撃できていることを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大ヘッド加速度AA(h)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大ヘッド加速度AA(h)が基準ラケットの最大ヘッド加速度AA(h)よりも大きくなるラケット10が、プレーヤー50に推奨される。
【0066】
また、最大ヘッド速度成分比IIは、プレーヤー50のスイングタイプと相関する。ここで、一般的に、以下のことが言える。すなわち、最大ヘッド速度成分比IIの絶対値が大きくかつ正の値であるスイングでは、テニスボールにトップスピンがかかりやすい。最大ヘッド速度成分比IIの絶対値が大きくかつ負の値であるスイングでは、テニスボールにスライススピンがかかりやすい。最大ヘッド速度成分比IIの絶対値がゼロに近いスイングでは、テニスボールにスピンがかかりにくい。
【0067】
図7に示すとおり、一覧表T1には、最大ヘッド速度成分比IIそのものを示す欄に加え、最大ヘッド速度成分比IIから判断可能なスイングタイプを示す欄が設けられている。従って、一覧表T1を見れば、プレーヤー50のスイングタイプに適したラケット10を選択することが可能になる。なお、スイングタイプは、算出部241により、以下のアルゴリズムにより判定される。すなわち、算出部241は、最大ヘッド速度成分比IIが0.60以上、0.25以上かつ0.60未満、0.00以上かつ0.25未満、又は0.00未満のいずれの範囲内であるかを判断する。そして、最大ヘッド速度成分比IIが0.60以上であれば、スイングタイプがトップスピンタイプであると判定され、0.25以上かつ0.60未満であれば、ドライブタイプであると判定され、0.00以上かつ0.25未満であれば、フラットタイプと判定され、0.00未満であれば、スライスタイプと判定される。
【0068】
また、最大ラケット角速度ωωが正の値であることは、フェース11を閉じつつテニスボールを打撃するスイングタイプであることを意味する。なお、最大ラケット角速度ωωは、グリップ12の軸に沿ってヘッド14からグリップ12に向かう方向からラケット10を見た場合の時計回りを、正の方向とする。また、最大ラケット角速度ωωが負の値であることは、フェース11を開きつつテニスボールを打撃するスイングタイプであることを意味する。従って、一覧表T1の最大ラケット角速度ωωの値を見れば、プレーヤー50のスイングタイプに適したラケット10を選択することが可能になる。また、一覧表T1には、最大ヘッド速度成分比IIに基づくスイングタイプの場合と同様に、最大ラケット角速度ωωそのものを示す欄に加え、最大ラケット角速度ωωに基づくスイングタイプを示す欄を設けてもよい。なお、最大ヘッド速度成分比II及び最大ラケット角速度ωωに基づくスイングタイプは、最大ヘッド速度成分比II及び最大ラケット角速度ωωを定性的に評価したものであるから、この意味で、これらのスイングタイプも、スイング動作の評価指標であると言える。
【0069】
また、最大ラケット角速度ωωが大きいことは、プレーヤー50によるラケット10の面の操作が多いことを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていないことを意味する。よって、最大ラケット角速度ωωは、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大ラケット角速度ωωが基準ラケットの最大ラケット角速度ωωよりも小さくなるラケット10が、プレーヤー50に推奨される。
【0070】
ところで、一覧表T1に含まれる行(図7では、5つ)は、対象ラケット群に1対1で対応している。すなわち、一覧表T1の各行は、スイング動作の分析単位に対応しており、各行には、対応するラケット名を表示する欄が設けられている。従って、一覧表T1は、複数の評価指標を、それぞれに対応するテニスラケット10に関連付けて同時に表示するデータとなる。その結果、一覧表T1を縦に見ることにより、オペレータは、対象ラケット群の間で、特定の種類の評価指標どうしを容易に比較することができる。また、オペレータは、一覧表T1を横に見ることにより、特定のテニスラケット10とプレーヤー50との相性を、複数の種類の評価指標から総合的に判断することができる。
【0071】
また、図7に示すとおり、一覧表T1には、各行に対応するラケット10がプレーヤー50に適しているか否かを示す「推奨ラケット」欄が設けられている。より具体的には、記憶部23のソフトウェア管理領域232内には、各種評価指標及び後述されるバラツキの値をパラメータとする総合指標の式が記憶されている。そして、画面作成部242は、各ラケット10に対応する各種評価指標及び後述されるバラツキの値を総合指標の式に代入することにより、各ラケット10に対応する総合指標の値を得る。そして、画面作成部242は、これらの総合指標の値を所定の閾値と比較することにより、対象ラケット群の中からプレーヤー50に適した1又は複数の特定のラケット10を選択する。そして、画面作成部242は、一覧表T1上で、選択された1又は複数のラケット10に対応する行の「推奨ラケット」欄に「〇」の記号を付与し、残りの行の同欄に「×」の記号を付与する。言い換えると、ここでは、画面作成部242は、対象ラケット群の間で、各種評価指標及び後述されるバラツキどうしを閾値を介して間接的に比較し、その比較の結果を表示している。しかしながら、この態様に代えて又は加えて、対象ラケット群に含まれるラケット10にそれぞれ対応する総合指標の値どうしを直接比較し、その比較の結果として、GUI画面上に対象ラケット群に含まれるラケット10のランキング等を表示するようにしてもよい。
【0072】
また、画面作成部242は、対象ラケット群に含まれるラケット10どうしを総合指標を用いて比較する上述の態様に代えて又は加えて、対象ラケット群に含まれるラケット10どうしを評価指標の種類毎に比較してもよい。この場合も、画面作成部242は、比較の結果として、GUI画面上に対象ラケット群に含まれるラケット10のランキング等を表示することができる。
【0073】
<3−2.スイング軌道>
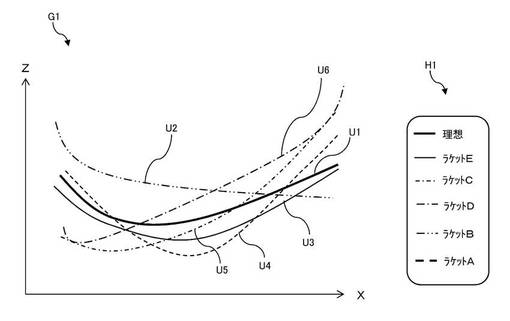
図8に示すように、画面作成部242は、GUI画面上にグラフ領域G1を表示する。また、画面作成部242は、このグラフ領域G1上に、対象ラケット群に含まれるラケット10にそれぞれ対応する複数のスイング軌道の線図U2〜U6のオブジェクトと、理想的なスイング軌道の線図U1のオブジェクトとを同時に表示する。上記したとおり、スイング軌道は、各ラケット10に対しサンプル数ずつ導出されるが、グラフ領域G1上では、これらの平均値が表示される。線図U2〜U6は、スイング軌道のX軸及びZ軸成分をプロットしたものである。なお、グラフ領域G1は、X軸及びZ軸を互いに直交する横軸及び縦軸として表示する二次元的な領域であるが、X軸及びZ軸の組み合わせだけでなく、X軸、Y軸及びZ軸から選択される任意の2つの軸を互いに直交する横軸及び縦軸として表示するようにしてもよい。また、X軸、Y軸及びZ軸を三次元的に表示してもよい。
【0074】
また、画面作成部242は、グラフ領域G1の傍に、線図U1〜U6とラケット10の名称(製品番号等)とを対応付ける凡例H12を同時に表示する。従って、オペレータは、どの線図U2〜U6がどのラケット10に対応しているかを容易に知ることができる。また、これにより、このグラフは、複数の評価指標(スイング軌道)を、それぞれに対応するラケット10に関連付けて同時に表示するデータであると言える。その結果、線図U1〜U6を見たオペレータは、各ラケット10でのスイングの軌道を知ることができる。また、オペレータは、線図U1〜U6を見ることにより、スイング軌道の観点から、対象ラケット群に含まれるラケット10どうしを容易に比較することができる。
【0075】
また、画面作成部242は、対象ラケット群に含まれる各ラケット10に対するスイング軌道を理想的なスイング軌道と比較することにより、当該ラケット10がこのプレーヤー50に適しているか否かを判定し、その比較の結果として、GUI画面上に対象ラケット群に含まれるラケット10のランキング等を表示してもよい。
【0076】
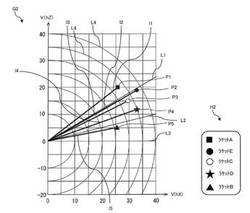
<3−3.最大ヘッド速度成分比IIのグラフ>
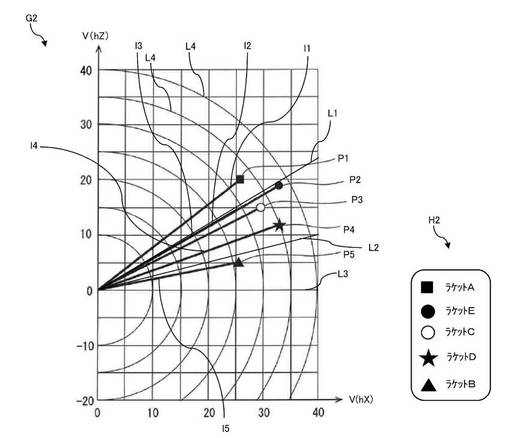
図9に示すように、画面作成部242は、GUI画面上にグラフ領域G2を表示する。また、画面作成部242は、このグラフ領域G2上に、対象ラケット群に含まれるラケット10にそれぞれ対応する太線l1〜l5のオブジェクトを同時に表示する。ここで、グラフ領域G2の横軸は、最大ヘッド速度VV(h)が得られる時刻における、X軸方向のヘッド速度V(hX)であり、縦軸は、最大ヘッド速度VV(h)が得られる時刻における、Z軸方向のヘッド速度V(hZ)である。従って、グラフ領域G2上の太線l1〜l5の傾きは、最大ヘッド速度成分比IIを示している。なお、上記したとおり、最大ヘッド速度VV(h)が得られる時刻におけるヘッド速度V(hX)及びヘッド速度V(hZ)は、各ラケット10に対しサンプル数ずつ導出されるが、グラフ領域G2上では、これらの平均値が表示される。
【0077】
太線l1〜l5は、対象ラケット群に1対1で対応している。すなわち、太線l1〜l5はそれぞれ、スイング動作の分析単位に対応している。ここで、図9に示すとおり、画面作成部242は、太線l1〜l5のそれぞれの先端に、点P1〜P5のオブジェクトを表示するとともに、グラフ領域G2の傍に、点P1〜P5とラケット10の名称(製品番号等)とを対応付ける凡例H2を同時に表示する。点P1〜P5は、色やパターン等に関し異なる表示形式で表示される。従って、オペレータは、どの太線l1〜l5がどのラケット10に対応しているかを容易に知ることができる。また、これにより、このグラフは、複数の評価指標(最大ヘッド速度成分比II)を、それぞれに対応するラケット10に関連付けて同時にグラフ表示するデータであると言える。その結果、太線l1〜l5を見たオペレータは、スイングタイプの観点から、対象ラケット群に含まれるラケット10どうしを容易に比較することができる。
【0078】
ところで、画面作成部242は、グラフ領域G2上にさらに、3本の直線L1〜L3のオブジェクトを同時に表示する。ここで、これらの直線L1〜L3は、以下の式で表される。
直線L1: V(hZ)=0.60*V(hX)
直線L2: V(hZ)=0.25*V(hX)
直線L3: V(hZ)=0.00
【0079】
すなわち、直線L1よりも上側の領域は、ヘッド速度成分比Iが0.60以上(トップスピンタイプ)の領域であり、直線L1と直線L2との間の領域は、ヘッド速度成分比Iが0.25以上かつ0.60未満(ドライブタイプ)の領域であり、直線L2と直線L3との間の領域は、ヘッド速度成分比Iが0.00以上かつ0.25未満(フラットタイプ)の領域であり、直線L3よりも下側の領域は、ヘッド速度成分比Iが0.00未満(スライスタイプ)の領域である。すなわち、直線L1〜L3は、グラフ領域G2をスイングタイプを示す複数の領域に分割し、スイングタイプの境界を示すための補助線となる。これにより、グラフG1を見たオペレータは、各ラケット10でのプレーヤー50のスイングタイプを容易に理解できるようになる。また、図9からは明らかではないが、かかる理解がより容易になるように、直線L1〜L3により分割される4つの領域は、色やパターン等に関し異なる表示形式で表示される。
【0080】
また、グラフ領域G2上において、原点から任意の点(V(hX),V(hZ))までの距離は、Y軸方向のヘッド速度V(hY)がゼロであると仮定されたときのヘッド速度の大きさV(h)(以下、ヘッド速度V’と呼ぶ)を意味する。従って、図9に示すように、グラフ領域G2上では、画面作成部242により、原点(0,0)を中心とする多数の円弧L4,L4,・・・のオブジェクトが表示される。これらの円弧L4,L4,・・・は、このグラフを見たオペレータが、各ラケット10に対応するヘッド速度V’の大きさを容易に理解できるようにするための補助線となる。
【0081】
<3−4.最大ヘッド速度成分比IIのバラツキのグラフ>
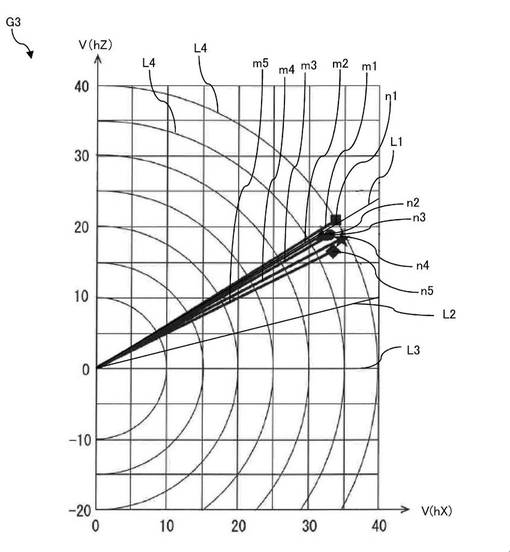
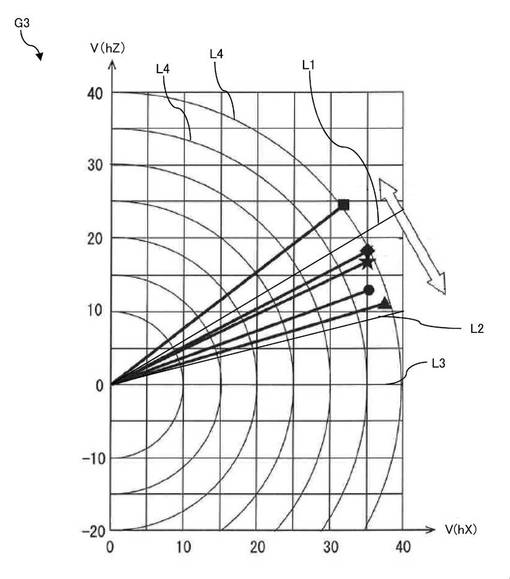
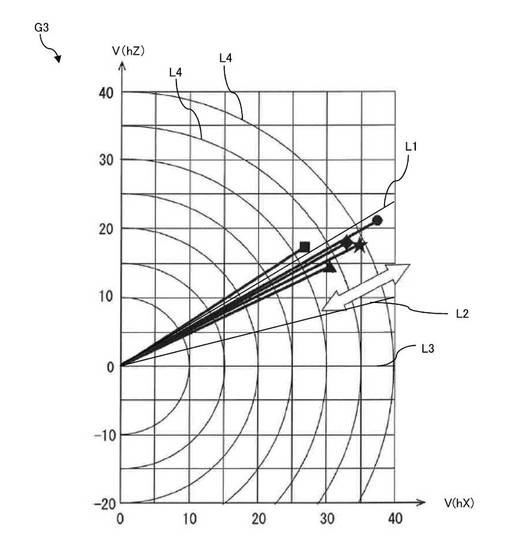
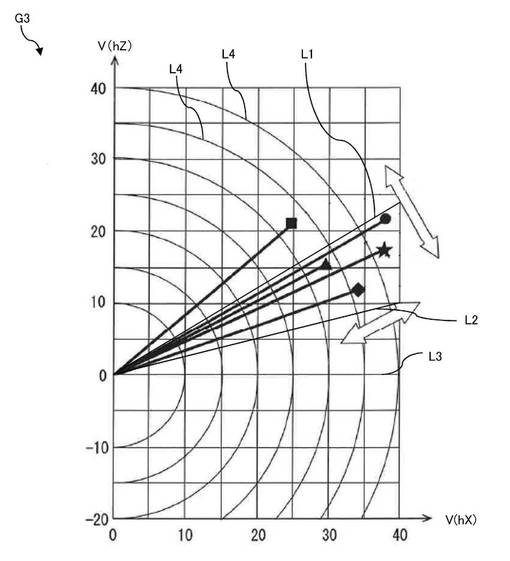
画面作成部242は、特定のラケット10でのユーザのスイング動作の安定性を評価するべく、GUI画面上に、図10〜図13に示すような最大ヘッド速度成分比IIのバラツキを示すグラフを同時に表示させる。このグラフは、対象ラケット群に含まれるラケット10の数だけ表示される。ここで、このグラフ領域G3の縦軸及び横軸の性質は、グラフ領域G1と同様である。また、グラフ領域G3上には、グラフ領域G1と同様の補助線L1〜L4が表示される。また、直線L1〜L3により分割されるグラフ領域G3上の4つの領域も、グラフ領域G1と同様に、色やパターン等に関し異なる表示形式で表示される。
【0082】
ここで、既に述べたとおり、最大ヘッド速度成分比IIは、各ラケット10に対し、所定のサンプル数だけ導出される。そのため、グラフ領域G1上では、同じラケット10に対し、サンプル数分の最大ヘッド速度成分比IIの平均値が表示されたが、グラフ領域G3上では、平均化する前のサンプル数の最大ヘッド速度成分比IIが表示される。従って、各グラフ領域G3上には、サンプル数と同数の太線m1〜m5及び点n1〜n5のオブジェクトが示される。図10〜図13は、サンプル数が5の場合を示している。従って、これらのグラフは、同じラケット10によるスイング動作の記録であるサンプル数の評価指標(最大ヘッド速度成分比II)を、同時にグラフ表示するデータである。その結果、グラフを見たオペレータは、そのグラフに対応するラケット10によるスイング動作のバラツキを直感的に判断することができる。
【0083】
また、画面作成部242は、各ラケット10に対するバラツキの値を定量的に算出し、グラフ領域G3の横に同時に表示させてもよい。この場合、オペレータは、定量的にもバラツキの度合いを容易に知ることができる。なお、定量的なバラツキの値とは、分散や標準偏差等である。
【0084】
ここで、図10では、太線m1〜m5が、原点を中心として半径方向にも、周方向にも集まっている。図11では、太線m1〜m5が、原点を中心として半径方向に集まっているが、周方向にはばらついている。図12では、太線m1〜m5が、原点を中心として半径方向にばらついているが、周方向に集まっている。図13では、太線m1〜m5が、原点を中心として半径方向にも、周方向にもばらついている。
【0085】
従って、図10〜図13により、以下のことが判断可能である。
(1)図10に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキが小さく、スイングタイプのバラツキも小さい。
(2)図11に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキは小さいが、スイングタイプのバラツキが大きい。
(3)図12に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキは大きいが、スイングタイプのバラツキが小さい。
(4)図13に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキが大きく、スイングタイプのバラツキも大きい。
【0086】
以上より、オペレータは、図10〜図13のグラフを見比べることにより、バラツキの観点から、複数のラケット10どうしを容易に比較することができる。フィッティングでは、ヘッド速度V’のバラツキについても、スイングタイプのバラツキについてもともに小さい、図10に対応するラケット10が推奨される。
【0087】
<3−5.最大ラケット角速度ωωのグラフ>
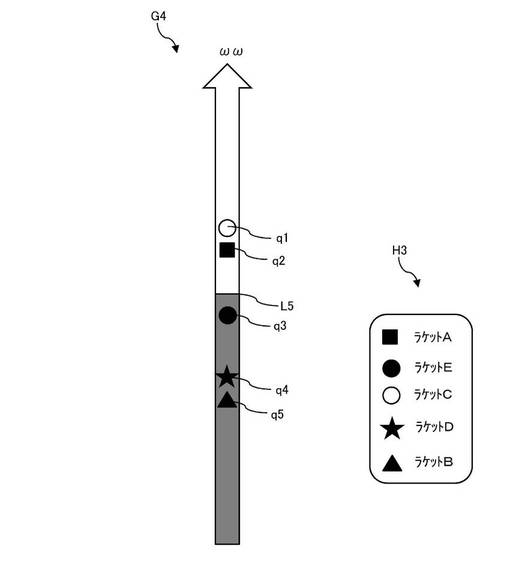
図14に示すように、画面作成部242は、GUI画面上にグラフ領域G4を表示する。また、画面作成部242は、このグラフ領域G4上に、対象ラケット群に含まれるラケット10にそれぞれ対応する点q1〜q5のオブジェクトを同時に表示する。点q1〜q5は、色やパターン等に関し異なる表示形式で表示される。ここで、グラフ領域G4は、1次元のグラフであり、唯一の軸である縦軸は、最大ラケット角速度ωωを示している。
【0088】
点q1〜q5は、対象ラケット群に1対1で対応している。すなわち、点q1〜q5はそれぞれ、スイング動作の分析単位に対応している。ここで、図14に示すとおり、画面作成部242は、グラフ領域G4の傍に、点q1〜q5とラケット10の名称(製品番号等)とを対応付ける凡例H3を同時に表示する。従って、オペレータは、どの点q1〜q5がどのラケット10に対応しているかを容易に知ることができる。また、これにより、このグラフは、複数の評価指標(最大ラケット角速度ωω)を、それぞれに対応するラケット10に関連付けて同時にグラフ表示するデータであると言える。その結果、点q1〜q5を見たオペレータは、スイングタイプの観点から、対象ラケット群に含まれるラケット10どうしを容易に比較することができる。
【0089】
ところで、画面作成部242は、グラフ領域G4上にさらに、1本の線分L5のオブジェクトを表示する。ここで、この線分L5は、以下の式で表される。
線分L5: ωω=0.00
【0090】
すなわち、線分L5よりも上側の領域は、最大ラケット角速度ωωが0.00以上(フェース11を閉じつつテニスボールを打撃するスイングタイプ)の領域であり、線分L5よりも下側の領域は、最大ラケット角速度ωωが0.00未満(フェース11を開きつつテニスボールを打撃するスイングタイプ)の領域である。すなわち、線分L5は、グラフ領域G4をスイングタイプを示す複数の領域に分割し、スイングタイプの境界を示すための補助線となる。これにより、グラフG4を見たオペレータは、各ラケット10でのプレーヤー50のスイングタイプを容易に理解できるようになる。また、かかる理解がより容易になるように、図14に示すとおり、線分L5により分割される2つの領域は、色やパターン等に関し異なる表示形式で表示される。
【0091】
<4.変形例>
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて、種々の変更が可能である。例えば、以下の変更が可能である。
<4−1>
本発明に係る分析システムは、上記実施形態のようなテニスラケットのフィッティングの場面だけでなく、ガットの張力のフィッティング、テニスのコーチング等の場面にも適用され得る。前者の例としては、サンプリングデータを、異なる種類のテニスラケットではなく、ガットの張力の異なる複数のテニスラケットに関するものとすればよい。
【0092】
<4−2>
サンプリングデータをサンプリングする方法は、上述したものに限られず、例えば、計測システム1を導入することに加えて又は代えて、テニスコート70の適所に1又は複数台のカメラを設置してもよい。カメラが利用される場合、分析装置2は、時系列の画像データを順次画像処理することにより、必要なパラメータを算出することができる。これらのセンサの出力値から各種指標を算出するようにしてもよい。
【0093】
<4−3>
計測システム1から分析装置2へサンプリングデータを送る方法は、上述した態様に限られない。例えば、計測中、サンプリングデータを計測システム1に付属のメモリ内に保存しておき、計測後、適当なタイミングで、このメモリを分析装置2に接続し、サンプリングデータを分析装置2へ取り込むようにしてもよい。
【0094】
<4−4>
GUI画面を出力する出力部は、ディスプレイの形態に限られず、プロッタ及び/又はプリンタ等であってもよい。
<4−5>
評価指標の種類は、上述したものに限られず、例えば、スイング動作により打ち返されたテニスボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせであってもよい。また、上記実施形態では、時刻毎のグリップ速度、グリップ加速度、ヘッド速度、ヘッド加速度、ヘッド速度成分比、及びラケット角速度の中から、評価指標として特に、ヘッド速度が最大となる時刻での値が選択された。しかしながら、別の特定のタイミング、例えば、それぞれの値が最大になる時刻におけるグリップ速度、グリップ加速度、ヘッド速度、ヘッド加速度、ヘッド速度成分比、及びラケット角速度等が選択されてもよい。
【0095】
<4−6>
サンプリングデータとして、素振りのデータを収集してもよい。
<4−7>
サンプル数は、適宜選択される値であり、例えば、1であってもよい。
【符号の説明】
【0096】
1 計測システム(サンプリング装置)
2 分析装置
50 プレーヤー(ユーザ)
10 テニスラケット
25 通信部(取得部)
231 分析プログラム
241 算出部
242 画面作成部(作成部)
100 分析システム
G1〜G4 グラフ領域
【技術分野】
【0001】
本発明は、ユーザによるテニスラケットのスイング動作を分析する分析装置、分析システム及び分析プログラムに関する。
【背景技術】
【0002】
従来より、ユーザによるテニスラケットのスイング動作を改善したり、ユーザに適したテニスラケットを選択したりするのに役立てるべく、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータに基づいて、テニスラケットの速度等を分析する技術が公知である(特許文献1,2参照)。具体的には、特許文献1では、ユーザによりスイングされたラケットの速度を測定し、この測定値とともに、この測定値に応じて選択される、ユーザに適したラケットの候補をユーザに向けて表示部に表示する装置が開示されている。また、特許文献2では、スイングの速度の他、ラケットの軌道やラケット面の向き等を検出し、これらの検出値とともに、これらの検出値に応じて判断される、スイング動作の良し悪しや、スイング動作をどのように改善すべきか等の情報をユーザに向けて表示部に表示する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−263340号公報
【特許文献2】特開2009−125499号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1,2は、ラケットの速度等の値及びこれらの値から導出される各種情報の具体的な表示の方法については、特に言及していない。しかしながら、これらの情報は、テニスラケットのスイング動作を改善したり、ユーザに適したテニスラケットを選択したりするに当たり、ユーザが把握しておく価値のある情報である。従って、これらの情報をユーザが直感的に理解可能なGUI(グラフィカル・ユーザーインターフェース)を用意することが重要である。
【0005】
本発明は、ユーザによるテニスラケットのスイング動作に関連する指標をユーザが直感的に理解可能な態様で表示するGUIを提示する分析装置、分析システム及び分析プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1観点に係るテニスのスイング動作の分析装置は、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成する画面作成部とを備える。
【0007】
本発明の第2観点に係る分析装置は、第1観点に係る分析装置であって、前記GUI画面は、前記グラフ領域上に、前記複数の領域の境界を示すための補助線を表示する。
本発明の第3観点に係る分析装置は、第1観点又は第2観点に係る分析装置であって、前記GUI画面は、前記グラフ領域に含まれる前記複数の領域を異なる表示形式で表示する。
【0008】
本発明の第4観点に係る分析装置は、第1観点から第3観点のいずれかに係る分析装置であって、前記グラフ領域は、前記指標の第1方向の成分を第1軸とし、前記指標の前記第1方向と直交する第2方向の成分を前記第1軸と直交する第2軸とする領域である。
本発明の第5観点に係る分析装置は、第4観点に係る分析装置であって、前記指標は、前記テニスラケットの速度である。
【0009】
本発明の第6観点に係る分析装置は、第1観点から第5観点のいずれかに係る分析装置であって、前記算出部は、第1指標及び第2指標を含む複数の種類の前記指標を算出し、前記グラフ領域は、前記第1指標を第1軸とし、前記第2指標を前記第1軸と直交する第2軸とする領域である。
【0010】
本発明の第7観点に係る分析装置は、第1観点から第6観点のいずれかに係る分析装置であって、前記算出部は、前記スイング動作の単位毎に、前記指標を算出し、前記GUI画面は、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示する。
【0011】
本発明の第8観点に係る分析装置は、第7観に係る分析装置であって、前記取得部は、前記ユーザによる異なる前記テニスラケットの前記スイング動作をサンプリングした前記サンプリングデータを取得する。前記算出部は、前記サンプリングデータに基づいて、前記異なるテニスラケットに属する前記スイング動作の単位毎に、前記指標を算出する。
【0012】
本発明の第9観点に係るテニスのスイング動作の分析システムは、第1観点から第8観点のいずれかに記載の分析装置と、前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置とを備える。
【0013】
本発明の第10観点に係るテニスのスイング動作の分析装置は、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成する画面作成部とを備える。
【0014】
本発明の第11観点に係るテニスのスイング動作の分析システムは、第10観点に記載の分析装置と、前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置とを備える。
【0015】
本発明の第12観点に係るテニスのスイング動作の分析プログラムは、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成するステップとをコンピュータに実行させる。
【0016】
本発明の第13観点に係るテニスのスイング動作の分析プログラムは、ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成するステップとをコンピュータに実行させる。
【発明の効果】
【0017】
本発明によれば、ユーザによるテニスラケットのスイング動作に関連する指標をユーザが直感的に理解可能な態様で表示するGUIを提示することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る分析システムの構成を示すブロック図である。
【図2】計測デバイスの構成を示す図である。
【図3】テニスコートを示す斜視図である。
【図4】スイング動作のサンプリング工程の処理の流れを示すフローチャートである。
【図5】ラケット角速度の計測に供されるテニスラケットがテニスボールとともに示された図である。
【図6】評価指標の算出工程及びGUI画面の作成工程の処理の流れを示すフローチャートである。
【図7】様々な評価指標の一覧表を示す図。
【図8】スイング軌道のグラフを示す図。
【図9】最大ヘッド速度成分比のグラフを示す図。
【図10】最大ヘッド速度成分比のバラツキを示すグラフを示す図。
【図11】最大ヘッド速度成分比のバラツキを示すグラフを示す別の図。
【図12】最大ヘッド速度成分比のバラツキを示すグラフを示す別の図。
【図13】最大ヘッド速度成分比のバラツキを示すグラフを示す別の図。
【図14】最大ラケット角速度のグラフを示す図。
【発明を実施するための形態】
【0019】
以下、図面を参照しつつ、本発明の一実施形態に係るユーザによるテニスラケットのスイング動作を分析する分析装置、分析システム及び分析プログラムについて説明する。
【0020】
<1.分析システムの構成>
図1に示すとおり、本発明の一実施形態に係る分析システム100は、ユーザによるテニスラケット10のスイング動作をサンプリングする計測デバイス1と、計測デバイス1から送られてくるサンプリングデータに基づいて、ユーザによるテニスラケット10のスイング動作を分析する分析装置2とを備えている。分析装置2は、ユーザによるテニスラケット10のスイング動作を分析することにより、主として、ユーザがテニスラケット10のフィッティングを行うのを支援すべく、スイング動作に関連する評価指標をユーザが直感的に理解可能な態様で表示するGUI画面を提示する。すなわち、分析システム1は、ユーザが様々なテニスラケット10の中から自分に適したテニスラケット10を選択するのを支援するためのシステムであり、主として、テニスラケット10の販売を行うテニス用品店や、テニススクール等に導入される。なお、「スイング」という用語には、グラウンドストロークのみならず、ボレーやサーブ等、テニスラケット10を振る任意の行為が含まれる。グラウンドストロークとは、一度テニスコートの地面でバウンドしたテニスボールを打撃することをいう。
【0021】
<1−1.計測デバイス>
まず、計測デバイス1について、図2も参照しつつ説明する。図2に示すように、この計測デバイス1は、テニスラケット10に取り付けられるセンサ部11と、このセンサ部11でサンプリングされる計測データ(サンプリングデータ)を分析装置2に送信するための通信部12とを備えている。ここで用いられるテニスラケット10は、一般的なものではあるが、縦横にガット101が張り渡されてフェース102が形成されたヘッド103を有しており、このヘッド103の一端から左右一対のスロート104が延びて一本のシャフト105に連結されている。また、シャフト105には、プレーヤーが把持するグリップ106が連結されている。
【0022】
そして、計測デバイス1のセンサ部11は、スイング動作の妨げにならないようにグリップ106の端部に取り付けられ、通信部12はグリップ106を把持する手501の上腕502に取り付けられる(図2の例では右手)。センサ部11には、三軸加速度センサ111及び三軸ジャイロセンサ112が内蔵されており、それぞれラケット10を基準とした相対座標(x、y、z)におけるグリップ106の加速度及び角速度が計測される。ここで、xyz相対座標系について説明すると、ラケット10のシャフト105の長手方向が、y軸の方向と一致している。y軸の方向は、フェース102と平行でもある。そして、ヘッド103からグリップ106に向かう方向が、y軸の正の方向である。z軸の方向も、フェース102に平行であるが、z軸は、y軸と直交しており、図2に示されたフェース102が時計の文字盤とみなされたとき、3時の位置から9時の位置へ向かう方向が、z軸の正の方向である。また、図2には示されていないが、x軸の方向は、y軸及びz軸と直交しており、フェース102に対して垂直である。また、ヘッド103の厚み方向における、裏側から表側に向かう方向が、x軸の正の方向である。表側は、フォアハンドのストロークのときにテニスボールと接触する側である。このように規定されたx軸、y軸及びz軸は、ラケット10を基準とした相対軸であり、x軸、y軸及びz軸の方向は、ラケット10の姿勢に応じて変動する。
【0023】
ところで、正面から飛んでくるテニスボールを打ち返すテニスラケット10のスイング動作を分析するためには、分析の対象となるラケット10の速度等の評価指標は、テニスコート等の固定された地面及び空間を基準としたものである必要がある。すなわち、ラケット10の速度等は、上述の相対座標(x,y,z)ではなく、固定された地面及び空間を基準とした絶対座標(X,Y,Z)に基づくべきである。そのため、本実施形態では、テニスコートを基準としたXYZ絶対座標系も規定されている。図3は、分析システム100が導入されるテニスコート70が示された斜視図である。図3には、スイング動作を行うプレーヤー50が示されている。このプレーヤー50は、右利きであり、右手501でラケット10を握っている。
【0024】
図3に示されるように、テニスコート70のサイドライン71の方向は、X軸の方向と一致している。プレーヤー50にとっての自陣72から相手陣73に向かう方向が、X軸の正の方向である。テニスコート70のエンドライン74の方向は、Y軸の方向と一致しており、相手陣73を向いたプレーヤー50にとっての右から左に向かう方向が、Y軸の正の方向である。また、Z軸の方向は、鉛直方向であり、上向きの方向が、Z軸の正の方向である。このX軸、Y軸及びZ軸は、テニスコート70が基準とされた絶対軸である。
【0025】
図1及び図2に戻って、計測デバイス1の説明を続ける。図2に示されるように、通信部12は、プレーヤー50のスイング動作の妨げとならないように、バンド13によって上腕502に固定されている。センサ部11と通信部12とは、ケーブル14によって接続されており、これにより、通信部12は、三軸加速度センサ111及び三軸ジャイロセンサ112での計測データを、ケーブル14を通じてセンサ部11から受け取る。通信部12は、このサンプリングデータを、分析装置2に向けて無線送信するが、その通信方式は、種々のものを適用可能である。例えば、いわゆるブルートゥース(BlueTooth:登録商標)方式、UWB(Ultra Wide Band)方式、無線LAN(Local Area Network)などによる近距離無線通信などを利用することができる。なお、センサ部11及び通信部12を駆動させるためのバッテリー(図示されず)も、バンド13によって上腕502に固定されている。
【0026】
<1−2.分析装置>
続いて、分析装置2について説明する。分析装置2は、CD−ROM、DVD−ROM、ブルーレイディスク、USBメモリ等のコンピュータで読み取り可能な記録媒体20に格納された分析プログラム231を汎用のパーソナルコンピュータにインストールすることにより製造される。分析プログラム231は、計測システム1から送られてくるサンプリングデータを加工することにより後述するGUI画面を作成し、これを表示部21に表示させるためのソフトウェアである。分析プログラム231は、分析装置2に後述する動作を実行させる。
【0027】
分析装置2は、表示部21、入力部22、記憶部23、制御部24、及び通信部25を有している。そして、これらは、互いにバス線26で接続されており、相互に通信可能である。本実施形態では、表示部21を、液晶ディスプレイ等で構成することができ、後述する画面等をプレーヤー50や分析装置2のオペレータに対し表示するユーザーインターフェースである。また、入力部22は、マウス、キーボード、タッチパネル等で構成することができ、分析装置2に対するユーザからの操作を受け付けるユーザーインターフェースである。
【0028】
記憶部23は、ハードディスク等の記憶装置から構成され、分析プログラム231が格納されているほか、ソフトウェア管理領域232が確保されている。ソフトウェア管理領域232は、分析プログラム231が使用する領域である。ソフトウェア管理領域232内には、生データ領域2321及び評価領域2322が確保されている。各領域2321,2322の役割については、後述する。
【0029】
また、制御部24は、CPU、ROMおよびRAM等から構成することができる。制御部24は、記憶部23内に格納されている分析プログラム231を読み出して実行することにより、図1に示すように、仮想的に算出部241及び画面作成部242として動作する。各部241,242の動作については、後述する。
【0030】
また、通信部25は、計測デバイス1の通信部12からデータを受信するほか、USBメモリなどの外部記憶装置からのデータを受け取る通信インターフェースとしても機能する。その他、必要に応じて、プリンタ、プロッタ等を接続することができる。
【0031】
<2.分析方法>
続いて、分析システム100による、主としてテニスラケット10のフィッティングのためのスイング動作の分析処理について説明する。本実施形態に係る分析処理は、3つの工程から構成されている。すなわち、計測デバイス1によりラケット10の加速度及び角速度の計測値をサンプリングするサンプリング工程、サンプリング工程によるサンプリングデータに基づいて、分析装置2によりスイング動作の評価指標を算出する算出工程、分析装置2により評価指標をグラフ表示するGUI画面を作成する画面作成工程の3つの工程である。以下、これらの工程を順に説明する。
【0032】
<2−1.サンプリング工程>
まず、サンプリング工程について説明すると、自分に適したテニスラケット10を探しているユーザ自身が、プレーヤー50としてテニスコート70に配置される。そして、このプレーヤー50に対し、相手陣73に配置されたもう一人のプレーヤー又はテニスボールマシーンからテニスボールが連続的に供給される。なお、プレーヤー50に対するボールの供給は、一定方向かつ一定速度とされることが好ましい。プレーヤー50は、ボールを相手陣73に打ち返すように心がけながら、手に持ったラケット10をスイングして、飛んできたボールを連続的に打ち返す。すなわち、分析システム100による分析の対象となるプレーヤー50のスイング動作は、いわゆる素振りではない。
【0033】
そして、プレーヤー50が上述のスイング動作を行っている間、計測デバイス1により、テニスラケット10のグリップ11の加速度及び角速度が計測される。具体的には、図4に示すとおり、所定のサンプリング間隔で、三軸加速度センサ111が、xyz相対座標系におけるグリップ11の加速度のx軸、y軸及びz軸成分であるA(gx),A(gy)及びA(gz)を計測するとともに、三軸ジャイロセンサ112が、グリップ11の角速度のx軸、y軸及びz軸成分であるω(gx),ω(gy)及びω(gz)を計測する(ステップS1)。サンプリング間隔は、特に限定されないが、例えば、1/1000〜1/500秒毎に、データを得ることができる。こうして計測されたグリップ加速度A(gx),A(gy)及びA(gz)並びにグリップ角速度ω(gx),ω(gy)及びω(gz)のデータは、通信部12から、分析装置2の通信部25へと、刻々と送信される(ステップS2)。また、こうして送信されたデータは、制御部24により、記憶部23の生データ領域2321に記憶される(ステップS3)。
【0034】
なお、上述のスイング動作は、通常、候補となる異なる種類の複数のラケット10に対し、繰り返し行われる。ここでいう異なる種類のラケット10とは、例えば、フレームの大きさや質量等が異なるラケット10や、ガット101の種類が異なるラケット10等である。本実施形態では、各ラケット10に対し、所定のサンプル数(例えば、5)ずつスイング動作が行われ、所定のサンプル数のスイング動作分のグリップ加速度A(gx),A(gy)及びA(gz)並びにグリップ角速度ω(gx),ω(gy)及びω(gz)のデータがサンプリングされる。これは、同じラケット10での複数回のスイング動作に関するデータを平均化することにより、ユーザとそのラケット10との相性を正確に評価するためである。また、これにより、特定のラケット10でのスイング動作の安定性を評価することも可能になる。従って、サンプル数は、例えば、3〜10回程度であることが好ましい。なお、本実施形態では、打撃したボールが相手陣73に入らなかったときは、当該スイング動作はサンプル数のカウントから外され、その後の分析の対象とならない。同様に、打撃したテニスボールが相手陣52に入ったとしても、明らかなミスショットであれば、当該スイング動作はサンプル数のカウントから外され、その後の分析の対象とならない。
【0035】
制御部24は、1本のラケット10に対応する所定のサンプル数のスイング動作の開始及び終了のタイミングを判断し、センサ部11から送信されてくるサンプリングデータをラケット10毎に区別して、生データ領域2321に格納する。分析装置2においては、1本のラケット10に対応するサンプリングデータが、スイング動作の分析単位となるからである。なお、図4の処理は、1本のラケット10に対応するスイング動作が開始するタイミングで開始し、これが終了するタイミングで終了する。すなわち、図4の処理は、スイング動作の分析単位毎に、繰り返し実行される。なお、分析装置2が1本のラケット10に対応するスイング動作の開始及び終了のタイミングを判断する方法は、特に限定されないが、例えば、オペレータが入力部22を介して開始/終了のタイミングを入力する方法が考えられる。なお、ここでいうオペレータとは、プレーヤー50自身であってもよいし、テニス用品店の店員や、テニススクールのコーチ等であってもよい。なお、サンプリングデータは、計測されるにつれてセンサ部11から刻々と分析装置2へ送信されるのではなく、センサ部11に設けられている所定の記憶部内に一時保存しておき、1本又は複数本のラケット10に対応するスイング動作が終了した段階でまとめて分析装置2へ送信するようにしてもよい。
【0036】
<2−2.評価指標の算出工程>
続いて、評価指標の算出工程について説明する。制御部24の算出部241は、1本のラケット10に対応するサンプリング工程が終了する度に、記憶部23の生データ領域2321に記憶されているグリップ加速度A(gx),A(gy)及びA(gz)並びにグリップ角速度ω(gx),ω(gy)及びω(gz)のデータの全て又は一部を参照することにより、スイング動作の評価指標を算出する。ここでいう評価指標とは、テニスラケット10の速度、加速度、角速度又は位置、或いはこれらの値を任意に組み合わせて定義される変数であり、定量的に表されるものであってもよいし、「大」「中」「小」等、定性的に表されるものであってもよい。また、「任意の組み合わせ」とは、係数の掛け合わせや1又は複数回の加減乗除等の演算を行いながら、任意の態様で物理量を組み合わせることを意味する。すなわち、評価指標とは、スイング動作時のテニスラケット10の挙動を示す物理量を用いて定義される変数であると考えることもできる。本実施形態における評価指標は、XYZ絶対座標系におけるグリップ加速度、グリップ速度、ヘッド速度、ヘッド加速度、ヘッド速度成分比及びスイング軌道、並びにxyz相対座標系におけるラケット角速度である。以下、各評価指標について説明する。
【0037】
[グリップ加速度]
XYZ絶対座標系におけるグリップ加速度は、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、並びにxyz相対座標系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)のデータに基づいて算出される。より具体的には、算出部241により、時刻毎のグリップ加速度A(gx),A(gy)及びA(gz)が、時刻毎のグリップ角速度ω(gx),ω(gy)及びω(gz)に基づいて、時刻毎のグリップ加速度のX軸、Y軸及びZ軸成分であるA(gX),A(gY)及びA(gZ)に変換される。変換に用いられるクォータニオンは、下記数式によって表される。
Q=[cos(θ);ω(gx)/θ*sin(θ/2),ω(gy)/θ*sin(θ/2),ω(gz)/θ*sin(θ/2)]
R=[cos(θ);-ω(gx)/θ*sin(θ/2),-ω(gy)/θ*sin(θ/2),-ω(gz)/θ*sin(θ/2)]
上記数式におけるθは、下記数式によって求められる。
θ=SQRT(ω(gx)2+ω(gy)2+ω(gz)2)
【0038】
続いて、算出部241により、XYZ絶対座標系における時刻毎のグリップ加速度A(gX),A(gY)及びA(gZ)から、XYZ絶対座標系における時刻毎のグリップ加速度の大きさA(g)が算出される。算出は、下記数式に基づいてなされる。
A(g)=SQRT(A(gx)2+A(gy)2+A(gz)2)
【0039】
そして、算出部241は、この時刻毎のグリップ加速度の大きさA(g)の中から、後述するヘッド速度の大きさV(h)が最大となる時刻のものを、最大グリップ加速度AA(g)として選択する。そして、算出部241は、時刻毎のグリップ加速度A(gX),A(gY)及びA(gZ)、時刻毎のグリップ加速度の大きさA(g)、及び最大グリップ加速度AA(g)を評価指標として評価領域2322に記憶する。
【0040】
[グリップ速度]
XYZ絶対座標系におけるグリップ速度は、XYZ絶対座標系におけるグリップ加速度A(gX),A(gY)及びA(gZ)のデータに基づいて算出される。より具体的には、算出部241により、時刻毎のグリップ速度のX軸、Y軸及びZ軸成分であるV(gX)、V(gY)及びV(gZ)が、下記数式に基づいて算出される。
ΔV(gX)=A(gX)*ΔT
ΔV(gY)=A(gY)*ΔT
ΔV(gZ)=A(gZ)*ΔT
上記数式において、ΔTは、微小時間(上述のサンプリング間隔)であり、ΔV(gX)、ΔV(gY)及びΔV(gZ)は、微小時間ΔTにおけるV(gX)、V(gY)及びV(gZ)の増分である。ΔTの値は、オペレータにより分析装置2に適宜入力される。
【0041】
続いて、算出部241により、XYZ絶対座標系における時刻毎のグリップ速度V(gX)、V(gY)及びV(gZ)から、XYZ絶対座標系における時刻毎のグリップ速度V(g)の大きさが算出される。算出は、下記数式に基づいてなされる。
V(g)=SQRT(V(gX)2+V(gY)2+V(gZ)2)
【0042】
そして、算出部241は、この時刻毎のグリップ速度の大きさV(g)の中から、後述するヘッド速度の大きさV(h)が最大となる時刻のものを、最大グリップ速度VV(g)として選択する。そして、算出部241は、時刻毎のグリップ速度V(gX)、V(gY)及びV(gZ)、時刻毎のグリップ速度の大きさV(g)、及び最大グリップ速度VV(g)を評価指標として評価領域2322に記憶する。
【0043】
[ヘッド速度]
XYZ絶対座標系におけるヘッド速度は、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、xyz相対座標軸系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)、並びにラケット長のデータに基づいて算出される。ラケット長のデータは、オペレータにより分析装置2に適宜入力される。具体的には、まず、算出部241が、前述の数式により、XYZ絶対座標系における時刻毎のグリップ速度V(gX)、V(gY)及びV(gZ)を算出する。一方、前述のクォータニオンから、算出部241が回転行列RMを算出する。算出部241はさらに、XYZ絶対座標系における時刻毎の回転による速度ベクトルVrを、下記数式に基づいて算出する。
Vr=cross(ω,tV)*RM
この数式において、cross(ω,tV)は、xyz相対座標系における時刻毎の角速度ベクトルωとラケット長ベクトルtVとの外積である。
【0044】
続いて、算出部241により、時刻毎のヘッド速度のX軸、Y軸及びZ軸成分であるV(hX),V(hY)及びV(hZ)が、下記数式によって算出される。
V(hX)=V(gX)+Vr(X)
V(hY)=V(gY)+Vr(Y)
V(hZ)=V(gZ)+Vr(Z)
【0045】
続いて、算出部241により、XYZ絶対座標系における時刻毎のヘッド速度V(hX),V(hY)及びV(hZ)から、XYZ絶対座標系における時刻毎のヘッド速度の大きさV(h)が算出される。算出は、下記数式に基づいてなされる。
V(h)=SQRT(V(hX)2+V(hY)2+V(hZ)2)
【0046】
そして、算出部241は、この時刻毎のヘッド速度の大きさV(h)の中から最大のものを、最大ヘッド速度VV(h)として選択する。そして、算出部241は、時刻毎のヘッド速度V(hX)、V(hY)及びV(hZ)、時刻毎のヘッド速度の大きさV(h)、及び最大ヘッド速度VV(h)を評価指標として評価領域2322に記憶する。なお、スイング動作の開始以降、ヘッド速度は徐々に上昇するが、テニスラケット10とテニスボールとのインパクトによって急激に減速する。従って、最大ヘッド速度VV(h)が得られる時刻は、インパクトの直前の時刻であり、プレーヤー50とラケット10との相性を判定するのに適した時刻と考えられる。なお、絶対座標系におけるヘッド速度は、相対座標系におけるグリップ速度及びグリップ角速度の計測値に基づいて算出されるが、センサ部11をヘッド103の先端に取り付けて相対座標系におけるヘッド加速度を計測し、このヘッド加速度を絶対座標系に変換した値から絶対座標系におけるヘッド速度を求めることもできる。
【0047】
[ヘッド加速度]
XYZ絶対座標系におけるヘッド加速度は、XYZ絶対座標系におけるヘッド速度V(hX),V(hY)及びV(hZ)に基づいて算出される。より具体的には、算出部241は、時刻毎のヘッド速度のX軸、Y軸及びZ軸成分であるV(hX),V(hY)及びV(hZ)をそれぞれ時間で微分することにより、時刻毎のヘッド加速度のX軸、Y軸及びZ軸成分であるA(hX)、A(hY)及びA(hZ)を算出する。
【0048】
続いて、算出部241により、XYZ絶対座標系における時刻毎のヘッド加速度A(hX)、A(hY)及びA(hZ)から、XYZ絶対座標系における時刻毎のヘッド加速度の大きさA(h)が算出される。算出は、下記数式に基づいてなされる。
A(h)=SQRT(A(hX)2+A(hY)2+A(hZ)2)
【0049】
そして、算出部241は、この時刻毎のヘッド加速度の大きさA(h)の中から、ヘッド速度の大きさV(h)が最大となる時刻(インパクト直前)のものを、最大ヘッド加速度AA(h)として選択する。そして、算出部241は、時刻毎のヘッド加速度A(hX)、A(hY)及びA(hZ)、時刻毎のヘッド加速度の大きさA(h)、及び最大ヘッド加速度AA(h)を評価指標として評価領域2322に記憶する。なお、絶対座標系におけるヘッド加速度は、相対座標系におけるグリップ速度及びグリップ角速度の計測値に基づいて算出されるが、センサ部11をヘッド103の先端に取り付けて相対座標系におけるヘッド加速度を計測し、このヘッド加速度を絶対座標系に変換することもできる。
[ヘッド速度成分比]
XYZ絶対座標系におけるヘッド速度成分比Iは、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、xyz相対座標軸系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)、並びにラケット長のデータに基づいて算出される。具体的には、まず、算出部241が、前述の数式により、XYZ絶対座標系における時刻毎のヘッド速度のX軸及びZ軸成分であるV(hX)及びV(hZ)を算出する。続いて、算出部241は、XYZ絶対座標系における時刻毎のヘッド速度成分比Iを下記数式に基づいて算出する。
I=V(hZ)/V(hX)
【0050】
そして、算出部241は、この時刻毎のヘッド速度成分比Iの中から、ヘッド速度の大きさV(h)が最大となる時刻(インパクト直前)のものを、最大ヘッド速度成分比IIとして選択する。そして、算出部241は、時刻毎のヘッド速度成分比I、及び最大ヘッド加速度IIを評価指標として評価領域2322に記憶する。なお、ヘッド速度成分比は、相対座標系におけるグリップ速度及びグリップ角速度の計測値に基づいて算出されるが、センサ部11をヘッド103の先端に取り付けて相対座標系におけるヘッド加速度を計測し、このヘッド加速度を絶対座標系に変換した値からヘッド速度成分比Iを求めることもできる。
【0051】
[スイング軌道]
XYZ絶対座標系におけるスイング軌道は、xyz相対座標系におけるグリップ加速度A(gx),A(gy)及びA(gz)、xyz相対座標軸系におけるグリップ角速度ω(gx),ω(gy)及びω(gz)、並びにラケット長のデータに基づいて算出される。具体的には、まず、算出部241が、前述の数式により、XYZ絶対座標系における時刻毎のグリップ速度V(gX),V(gY)及びV(gZ)を算出する。続いて、算出部241は、このグリップ速度V(gX),V(gY)及びV(gZ)から、下記数式に基づいて、時刻毎のグリップ11の位置のX軸、Y軸及びZ軸成分であるP(gX),P(gY)及びP(gZ)を算出する。
ΔP(gX)=V(gX)*ΔT
ΔP(gY)=V(gY)*ΔT
ΔP(gZ)=V(gZ)*ΔT
上記数式において、ΔTは、微小時間(上述のサンプリング間隔)であり、ΔP(gX),ΔP(gY)及びΔP(gZ)は、微小時間ΔTにおけるP(gX),P(gY)及びP(gZ)の増分である。
【0052】
また、算出部241は、グリップ11に対する時刻毎のヘッド103のトップの相対位置P(h)を、下記数式によって算出する。
P(h)=tV*RM
上記数式において、tVは前述のラケット長ベクトルであり、RMは前述の回転行列である。算出部241は、下記数式により、時刻毎のヘッド103のトップの絶対座標(Xt,Yt,Zt)を算出し、評価指標として評価領域2322に記憶する。時刻毎の絶対座標(Xt,Yt,Zt)は、ラケット12の軌道を意味している。
(Xt,Yt,Zt)=P(g)+P(h)
【0053】
算出部241は、時刻toからtまでの絶対座標軸X方向のヘッド103の移動距離JXを、下記数式によって算出する。
JX=(Xt−Xto)
算出部241は、時刻toからtまでの絶対座標軸Y方向のヘッド103の移動距離JYを、下記数式によって算出する。
JY=(Yt−Yto)
算出部241は、時刻toからtまでの絶対座標軸Z方向のヘッド103の移動距離JZを、下記数式によって算出する。
JZ=(Zt−Zto)
移動距離JX,JY及びJZは、評価指標として評価領域2322に記憶される。
【0054】
様々な時間帯における移動距離JX,JY及びJZが算出され得る。例えば、インパクトのt秒前と、インパクトとの間の移動距離JX,JY及びJZが算出され得る。また、インパクトと、インパクトからt秒後との間の移動距離JX,JY及びJZが算出され得る。
【0055】
[ラケット角速度]
xyz相対座標系におけるラケット角速度は、三軸ジャイロセンサ112の計測値である、y軸の回りのグリップ角速度ω(gy)である。
図5には、サンプリング工程におけるテニスラケット10が示されている。図5には、相対座標軸yの方向に沿って見たヘッド103が示されている。図5には、ラケット10とインパクトする直前のテニスボール90も示されている。この図において矢印Aで示されているのは、ヘッド103の回転方向である。この回転の角速度が、前述のグリップ角速度ω(gy)である。時刻毎のグリップ角速度ω(gy)は、評価指標である時刻毎のラケット角速度として評価領域2322に記憶される。また、算出部241は、この時刻毎のグリップ角速度ω(gy)の中から、ヘッド速度の大きさV(h)が最大となる時刻のものを、最大ラケット角速度ωωとして選択し、評価指標として評価領域2322に記憶する。
【0056】
なお、既に述べたとおり、サンプリング工程では、各ラケット10に対し、所定のサンプル数のスイング動作が行われる。従って、サンプル数が複数である場合には、上述の各評価指標も、各ラケット10に対し、複数個ずつ算出されることになる。この場合には、算出部241は、ラケット10単位で、評価指標の種類毎に複数個の評価指標を平均化し、これらの平均値も評価指標として評価領域2322に記憶する。
【0057】
<2−3.GUI画面の作成工程>
続いて、GUI画面の作成工程について、上述の評価指標の算出工程を含め、図6を参照しつつ説明する。図6に示す処理は、最初の1本のラケット10に対応するサンプリング工程が終了したタイミングで開始する。
【0058】
まず、制御部24の画面作成部242は、ステップS21として、1本のラケット10に対応するサンプリングデータに基づいて、上述の様々な評価指標を算出する。
続いて、画面作成部242は、ステップS22として、ステップS21で算出された後、評価領域2322に記憶されている様々な評価指標をそのままで、或いは適宜加工したものを、表形式やグラフ形式等の様々な形式で表示するGUI画面を作成し、表示部21上に表示させる。GUI画面に表示される各種項目の例については、後述する。
【0059】
図6に示すとおり、上述のステップS21,S22は、オペレータにより入力部20を介してGUI画面の表示の終了の命令が入力されるまで、各ラケット10に対応するサンプリングデータに対し、繰り返し実行される。一方、オペレータにより入力部20を介してGUI画面の表示の終了の命令が入力をされると、制御部21は、表示部21上におけるGUI画面の表示を終了し、図6に示す処理を終了させる。これにより、スイング動作の分析処理も、終了する。
【0060】
なお、最初の1本のラケット10に対応するサンプリングデータに対するステップS22が実行された直後のGUI画面は、ラケット10の1本分のサンプリングデータに対応する様々な評価指標が表形式やグラフ形式で表示されたものである。そして、その後、ステップS22が繰り返される度に、表示部21上のGUI画面は、新たな画面へと更新される。すなわち、GUI画面が更新される度に、GUI画面上では、後述する一覧表T1内の行データが増え、後述するグラフ領域G1,G2上にプロットされる太線が増え、後述するグラフ領域G3自体が増え、さらに、後述するグラフ領域G4上にプロットされる点も増えてゆくことになる。従って、1本のラケット10のスイング動作のみをサンプリングした場合には、後述する一覧表T1内の行は1行となり、後述するグラフ領域G1,G2上にプロットされる太線は1本のみとなり、後述するグラフ領域G3も1つだけとなり、グラフ領域G4上にプロットされる点も1つのみとなる。このように、1本のラケット10に対するスイング動作のみをサンプリングすることは、特定のラケット(例えば、マイラケット)によるプレーヤー50のスイング動作を分析し、これを改善してゆくのに役立つ。
【0061】
<3.GUI画面上の各種項目>
以下、GUI画面上に表示される各種項目について説明する。
<3−1.評価指標の一覧表>
画面作成部242は、評価領域232内に記憶されている評価指標を適宜参照することにより、GUI画面上に図7に示す一覧表T1を表示させる。一覧表T1には、最大グリップ速度VV(g)、最大グリップ加速度AA(g)、最大ヘッド速度VV(h)、最大ヘッド加速度AA(h)、最大ヘッド速度成分比II、及び最大ラケット角速度ωωを表示する欄が設けられている。上記したとおり、これらの各評価指標は、各ラケット10に対しサンプル数ずつ導出されるが、一覧表T1内では、これらの平均値が表示される。
【0062】
ここで、最大グリップ速度VV(g)が大きいことは、プレーヤー50の腕の力みや手の緩みが少ないことを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大グリップ速度VV(g)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大グリップ速度VV(g)が基準ラケットの最大グリップ速度Vgよりも大きくなるラケット10が、プレーヤー50に推奨される。基準ラケットは、例えば、プレーヤー50が日頃使用しているラケットである。従って、プレーヤー50によるスイング動作の計測時に使用される複数のテニスラケット10(以下、対象ラケット群という)の1つをマイラケットとしておけば、新しいラケット10を現在のマイラケットとの比較により選択することが可能になる。GUI画面上に表示されるその他の項目についても、同様である。
【0063】
また、最大グリップ加速度AA(g)が大きいことは、プレーヤー50の腕の力みや手の緩みが少なく、しかも、テニスボールに強い打撃を与え得ることを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大グリップ加速度AA(g)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大グリップ加速度AA(g)が基準ラケットの最大グリップ加速度AA(g)よりも大きくなるラケット10が、プレーヤー50に推奨される。
【0064】
また、最大ヘッド速度VV(h)が大きいことは、プレーヤー50がテニスボールを強く打撃できていることを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大ヘッド速度VV(h)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大ヘッド速度VV(h)が基準ラケットの最大ヘッド速度VV(h)よりも大きくなるラケット10が、プレーヤー50に推奨される。
【0065】
また、最大ヘッド加速度AA(h)が大きいことは、プレーヤー50がテニスボールにより大きい運動エネルギーを与え、強く打撃できていることを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていることを意味する。よって、最大ヘッド加速度AA(h)は、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大ヘッド加速度AA(h)が基準ラケットの最大ヘッド加速度AA(h)よりも大きくなるラケット10が、プレーヤー50に推奨される。
【0066】
また、最大ヘッド速度成分比IIは、プレーヤー50のスイングタイプと相関する。ここで、一般的に、以下のことが言える。すなわち、最大ヘッド速度成分比IIの絶対値が大きくかつ正の値であるスイングでは、テニスボールにトップスピンがかかりやすい。最大ヘッド速度成分比IIの絶対値が大きくかつ負の値であるスイングでは、テニスボールにスライススピンがかかりやすい。最大ヘッド速度成分比IIの絶対値がゼロに近いスイングでは、テニスボールにスピンがかかりにくい。
【0067】
図7に示すとおり、一覧表T1には、最大ヘッド速度成分比IIそのものを示す欄に加え、最大ヘッド速度成分比IIから判断可能なスイングタイプを示す欄が設けられている。従って、一覧表T1を見れば、プレーヤー50のスイングタイプに適したラケット10を選択することが可能になる。なお、スイングタイプは、算出部241により、以下のアルゴリズムにより判定される。すなわち、算出部241は、最大ヘッド速度成分比IIが0.60以上、0.25以上かつ0.60未満、0.00以上かつ0.25未満、又は0.00未満のいずれの範囲内であるかを判断する。そして、最大ヘッド速度成分比IIが0.60以上であれば、スイングタイプがトップスピンタイプであると判定され、0.25以上かつ0.60未満であれば、ドライブタイプであると判定され、0.00以上かつ0.25未満であれば、フラットタイプと判定され、0.00未満であれば、スライスタイプと判定される。
【0068】
また、最大ラケット角速度ωωが正の値であることは、フェース11を閉じつつテニスボールを打撃するスイングタイプであることを意味する。なお、最大ラケット角速度ωωは、グリップ12の軸に沿ってヘッド14からグリップ12に向かう方向からラケット10を見た場合の時計回りを、正の方向とする。また、最大ラケット角速度ωωが負の値であることは、フェース11を開きつつテニスボールを打撃するスイングタイプであることを意味する。従って、一覧表T1の最大ラケット角速度ωωの値を見れば、プレーヤー50のスイングタイプに適したラケット10を選択することが可能になる。また、一覧表T1には、最大ヘッド速度成分比IIに基づくスイングタイプの場合と同様に、最大ラケット角速度ωωそのものを示す欄に加え、最大ラケット角速度ωωに基づくスイングタイプを示す欄を設けてもよい。なお、最大ヘッド速度成分比II及び最大ラケット角速度ωωに基づくスイングタイプは、最大ヘッド速度成分比II及び最大ラケット角速度ωωを定性的に評価したものであるから、この意味で、これらのスイングタイプも、スイング動作の評価指標であると言える。
【0069】
また、最大ラケット角速度ωωが大きいことは、プレーヤー50によるラケット10の面の操作が多いことを意味し、従って、当該ラケット10がこのプレーヤー50にマッチしていないことを意味する。よって、最大ラケット角速度ωωは、当該ラケット10がこのプレーヤー50に適しているか否かの判断材料となる。フィッティングでは、その最大ラケット角速度ωωが基準ラケットの最大ラケット角速度ωωよりも小さくなるラケット10が、プレーヤー50に推奨される。
【0070】
ところで、一覧表T1に含まれる行(図7では、5つ)は、対象ラケット群に1対1で対応している。すなわち、一覧表T1の各行は、スイング動作の分析単位に対応しており、各行には、対応するラケット名を表示する欄が設けられている。従って、一覧表T1は、複数の評価指標を、それぞれに対応するテニスラケット10に関連付けて同時に表示するデータとなる。その結果、一覧表T1を縦に見ることにより、オペレータは、対象ラケット群の間で、特定の種類の評価指標どうしを容易に比較することができる。また、オペレータは、一覧表T1を横に見ることにより、特定のテニスラケット10とプレーヤー50との相性を、複数の種類の評価指標から総合的に判断することができる。
【0071】
また、図7に示すとおり、一覧表T1には、各行に対応するラケット10がプレーヤー50に適しているか否かを示す「推奨ラケット」欄が設けられている。より具体的には、記憶部23のソフトウェア管理領域232内には、各種評価指標及び後述されるバラツキの値をパラメータとする総合指標の式が記憶されている。そして、画面作成部242は、各ラケット10に対応する各種評価指標及び後述されるバラツキの値を総合指標の式に代入することにより、各ラケット10に対応する総合指標の値を得る。そして、画面作成部242は、これらの総合指標の値を所定の閾値と比較することにより、対象ラケット群の中からプレーヤー50に適した1又は複数の特定のラケット10を選択する。そして、画面作成部242は、一覧表T1上で、選択された1又は複数のラケット10に対応する行の「推奨ラケット」欄に「〇」の記号を付与し、残りの行の同欄に「×」の記号を付与する。言い換えると、ここでは、画面作成部242は、対象ラケット群の間で、各種評価指標及び後述されるバラツキどうしを閾値を介して間接的に比較し、その比較の結果を表示している。しかしながら、この態様に代えて又は加えて、対象ラケット群に含まれるラケット10にそれぞれ対応する総合指標の値どうしを直接比較し、その比較の結果として、GUI画面上に対象ラケット群に含まれるラケット10のランキング等を表示するようにしてもよい。
【0072】
また、画面作成部242は、対象ラケット群に含まれるラケット10どうしを総合指標を用いて比較する上述の態様に代えて又は加えて、対象ラケット群に含まれるラケット10どうしを評価指標の種類毎に比較してもよい。この場合も、画面作成部242は、比較の結果として、GUI画面上に対象ラケット群に含まれるラケット10のランキング等を表示することができる。
【0073】
<3−2.スイング軌道>
図8に示すように、画面作成部242は、GUI画面上にグラフ領域G1を表示する。また、画面作成部242は、このグラフ領域G1上に、対象ラケット群に含まれるラケット10にそれぞれ対応する複数のスイング軌道の線図U2〜U6のオブジェクトと、理想的なスイング軌道の線図U1のオブジェクトとを同時に表示する。上記したとおり、スイング軌道は、各ラケット10に対しサンプル数ずつ導出されるが、グラフ領域G1上では、これらの平均値が表示される。線図U2〜U6は、スイング軌道のX軸及びZ軸成分をプロットしたものである。なお、グラフ領域G1は、X軸及びZ軸を互いに直交する横軸及び縦軸として表示する二次元的な領域であるが、X軸及びZ軸の組み合わせだけでなく、X軸、Y軸及びZ軸から選択される任意の2つの軸を互いに直交する横軸及び縦軸として表示するようにしてもよい。また、X軸、Y軸及びZ軸を三次元的に表示してもよい。
【0074】
また、画面作成部242は、グラフ領域G1の傍に、線図U1〜U6とラケット10の名称(製品番号等)とを対応付ける凡例H12を同時に表示する。従って、オペレータは、どの線図U2〜U6がどのラケット10に対応しているかを容易に知ることができる。また、これにより、このグラフは、複数の評価指標(スイング軌道)を、それぞれに対応するラケット10に関連付けて同時に表示するデータであると言える。その結果、線図U1〜U6を見たオペレータは、各ラケット10でのスイングの軌道を知ることができる。また、オペレータは、線図U1〜U6を見ることにより、スイング軌道の観点から、対象ラケット群に含まれるラケット10どうしを容易に比較することができる。
【0075】
また、画面作成部242は、対象ラケット群に含まれる各ラケット10に対するスイング軌道を理想的なスイング軌道と比較することにより、当該ラケット10がこのプレーヤー50に適しているか否かを判定し、その比較の結果として、GUI画面上に対象ラケット群に含まれるラケット10のランキング等を表示してもよい。
【0076】
<3−3.最大ヘッド速度成分比IIのグラフ>
図9に示すように、画面作成部242は、GUI画面上にグラフ領域G2を表示する。また、画面作成部242は、このグラフ領域G2上に、対象ラケット群に含まれるラケット10にそれぞれ対応する太線l1〜l5のオブジェクトを同時に表示する。ここで、グラフ領域G2の横軸は、最大ヘッド速度VV(h)が得られる時刻における、X軸方向のヘッド速度V(hX)であり、縦軸は、最大ヘッド速度VV(h)が得られる時刻における、Z軸方向のヘッド速度V(hZ)である。従って、グラフ領域G2上の太線l1〜l5の傾きは、最大ヘッド速度成分比IIを示している。なお、上記したとおり、最大ヘッド速度VV(h)が得られる時刻におけるヘッド速度V(hX)及びヘッド速度V(hZ)は、各ラケット10に対しサンプル数ずつ導出されるが、グラフ領域G2上では、これらの平均値が表示される。
【0077】
太線l1〜l5は、対象ラケット群に1対1で対応している。すなわち、太線l1〜l5はそれぞれ、スイング動作の分析単位に対応している。ここで、図9に示すとおり、画面作成部242は、太線l1〜l5のそれぞれの先端に、点P1〜P5のオブジェクトを表示するとともに、グラフ領域G2の傍に、点P1〜P5とラケット10の名称(製品番号等)とを対応付ける凡例H2を同時に表示する。点P1〜P5は、色やパターン等に関し異なる表示形式で表示される。従って、オペレータは、どの太線l1〜l5がどのラケット10に対応しているかを容易に知ることができる。また、これにより、このグラフは、複数の評価指標(最大ヘッド速度成分比II)を、それぞれに対応するラケット10に関連付けて同時にグラフ表示するデータであると言える。その結果、太線l1〜l5を見たオペレータは、スイングタイプの観点から、対象ラケット群に含まれるラケット10どうしを容易に比較することができる。
【0078】
ところで、画面作成部242は、グラフ領域G2上にさらに、3本の直線L1〜L3のオブジェクトを同時に表示する。ここで、これらの直線L1〜L3は、以下の式で表される。
直線L1: V(hZ)=0.60*V(hX)
直線L2: V(hZ)=0.25*V(hX)
直線L3: V(hZ)=0.00
【0079】
すなわち、直線L1よりも上側の領域は、ヘッド速度成分比Iが0.60以上(トップスピンタイプ)の領域であり、直線L1と直線L2との間の領域は、ヘッド速度成分比Iが0.25以上かつ0.60未満(ドライブタイプ)の領域であり、直線L2と直線L3との間の領域は、ヘッド速度成分比Iが0.00以上かつ0.25未満(フラットタイプ)の領域であり、直線L3よりも下側の領域は、ヘッド速度成分比Iが0.00未満(スライスタイプ)の領域である。すなわち、直線L1〜L3は、グラフ領域G2をスイングタイプを示す複数の領域に分割し、スイングタイプの境界を示すための補助線となる。これにより、グラフG1を見たオペレータは、各ラケット10でのプレーヤー50のスイングタイプを容易に理解できるようになる。また、図9からは明らかではないが、かかる理解がより容易になるように、直線L1〜L3により分割される4つの領域は、色やパターン等に関し異なる表示形式で表示される。
【0080】
また、グラフ領域G2上において、原点から任意の点(V(hX),V(hZ))までの距離は、Y軸方向のヘッド速度V(hY)がゼロであると仮定されたときのヘッド速度の大きさV(h)(以下、ヘッド速度V’と呼ぶ)を意味する。従って、図9に示すように、グラフ領域G2上では、画面作成部242により、原点(0,0)を中心とする多数の円弧L4,L4,・・・のオブジェクトが表示される。これらの円弧L4,L4,・・・は、このグラフを見たオペレータが、各ラケット10に対応するヘッド速度V’の大きさを容易に理解できるようにするための補助線となる。
【0081】
<3−4.最大ヘッド速度成分比IIのバラツキのグラフ>
画面作成部242は、特定のラケット10でのユーザのスイング動作の安定性を評価するべく、GUI画面上に、図10〜図13に示すような最大ヘッド速度成分比IIのバラツキを示すグラフを同時に表示させる。このグラフは、対象ラケット群に含まれるラケット10の数だけ表示される。ここで、このグラフ領域G3の縦軸及び横軸の性質は、グラフ領域G1と同様である。また、グラフ領域G3上には、グラフ領域G1と同様の補助線L1〜L4が表示される。また、直線L1〜L3により分割されるグラフ領域G3上の4つの領域も、グラフ領域G1と同様に、色やパターン等に関し異なる表示形式で表示される。
【0082】
ここで、既に述べたとおり、最大ヘッド速度成分比IIは、各ラケット10に対し、所定のサンプル数だけ導出される。そのため、グラフ領域G1上では、同じラケット10に対し、サンプル数分の最大ヘッド速度成分比IIの平均値が表示されたが、グラフ領域G3上では、平均化する前のサンプル数の最大ヘッド速度成分比IIが表示される。従って、各グラフ領域G3上には、サンプル数と同数の太線m1〜m5及び点n1〜n5のオブジェクトが示される。図10〜図13は、サンプル数が5の場合を示している。従って、これらのグラフは、同じラケット10によるスイング動作の記録であるサンプル数の評価指標(最大ヘッド速度成分比II)を、同時にグラフ表示するデータである。その結果、グラフを見たオペレータは、そのグラフに対応するラケット10によるスイング動作のバラツキを直感的に判断することができる。
【0083】
また、画面作成部242は、各ラケット10に対するバラツキの値を定量的に算出し、グラフ領域G3の横に同時に表示させてもよい。この場合、オペレータは、定量的にもバラツキの度合いを容易に知ることができる。なお、定量的なバラツキの値とは、分散や標準偏差等である。
【0084】
ここで、図10では、太線m1〜m5が、原点を中心として半径方向にも、周方向にも集まっている。図11では、太線m1〜m5が、原点を中心として半径方向に集まっているが、周方向にはばらついている。図12では、太線m1〜m5が、原点を中心として半径方向にばらついているが、周方向に集まっている。図13では、太線m1〜m5が、原点を中心として半径方向にも、周方向にもばらついている。
【0085】
従って、図10〜図13により、以下のことが判断可能である。
(1)図10に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキが小さく、スイングタイプのバラツキも小さい。
(2)図11に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキは小さいが、スイングタイプのバラツキが大きい。
(3)図12に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキは大きいが、スイングタイプのバラツキが小さい。
(4)図13に対応するラケット10によるスイングでは、ヘッド速度V’のバラツキが大きく、スイングタイプのバラツキも大きい。
【0086】
以上より、オペレータは、図10〜図13のグラフを見比べることにより、バラツキの観点から、複数のラケット10どうしを容易に比較することができる。フィッティングでは、ヘッド速度V’のバラツキについても、スイングタイプのバラツキについてもともに小さい、図10に対応するラケット10が推奨される。
【0087】
<3−5.最大ラケット角速度ωωのグラフ>
図14に示すように、画面作成部242は、GUI画面上にグラフ領域G4を表示する。また、画面作成部242は、このグラフ領域G4上に、対象ラケット群に含まれるラケット10にそれぞれ対応する点q1〜q5のオブジェクトを同時に表示する。点q1〜q5は、色やパターン等に関し異なる表示形式で表示される。ここで、グラフ領域G4は、1次元のグラフであり、唯一の軸である縦軸は、最大ラケット角速度ωωを示している。
【0088】
点q1〜q5は、対象ラケット群に1対1で対応している。すなわち、点q1〜q5はそれぞれ、スイング動作の分析単位に対応している。ここで、図14に示すとおり、画面作成部242は、グラフ領域G4の傍に、点q1〜q5とラケット10の名称(製品番号等)とを対応付ける凡例H3を同時に表示する。従って、オペレータは、どの点q1〜q5がどのラケット10に対応しているかを容易に知ることができる。また、これにより、このグラフは、複数の評価指標(最大ラケット角速度ωω)を、それぞれに対応するラケット10に関連付けて同時にグラフ表示するデータであると言える。その結果、点q1〜q5を見たオペレータは、スイングタイプの観点から、対象ラケット群に含まれるラケット10どうしを容易に比較することができる。
【0089】
ところで、画面作成部242は、グラフ領域G4上にさらに、1本の線分L5のオブジェクトを表示する。ここで、この線分L5は、以下の式で表される。
線分L5: ωω=0.00
【0090】
すなわち、線分L5よりも上側の領域は、最大ラケット角速度ωωが0.00以上(フェース11を閉じつつテニスボールを打撃するスイングタイプ)の領域であり、線分L5よりも下側の領域は、最大ラケット角速度ωωが0.00未満(フェース11を開きつつテニスボールを打撃するスイングタイプ)の領域である。すなわち、線分L5は、グラフ領域G4をスイングタイプを示す複数の領域に分割し、スイングタイプの境界を示すための補助線となる。これにより、グラフG4を見たオペレータは、各ラケット10でのプレーヤー50のスイングタイプを容易に理解できるようになる。また、かかる理解がより容易になるように、図14に示すとおり、線分L5により分割される2つの領域は、色やパターン等に関し異なる表示形式で表示される。
【0091】
<4.変形例>
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて、種々の変更が可能である。例えば、以下の変更が可能である。
<4−1>
本発明に係る分析システムは、上記実施形態のようなテニスラケットのフィッティングの場面だけでなく、ガットの張力のフィッティング、テニスのコーチング等の場面にも適用され得る。前者の例としては、サンプリングデータを、異なる種類のテニスラケットではなく、ガットの張力の異なる複数のテニスラケットに関するものとすればよい。
【0092】
<4−2>
サンプリングデータをサンプリングする方法は、上述したものに限られず、例えば、計測システム1を導入することに加えて又は代えて、テニスコート70の適所に1又は複数台のカメラを設置してもよい。カメラが利用される場合、分析装置2は、時系列の画像データを順次画像処理することにより、必要なパラメータを算出することができる。これらのセンサの出力値から各種指標を算出するようにしてもよい。
【0093】
<4−3>
計測システム1から分析装置2へサンプリングデータを送る方法は、上述した態様に限られない。例えば、計測中、サンプリングデータを計測システム1に付属のメモリ内に保存しておき、計測後、適当なタイミングで、このメモリを分析装置2に接続し、サンプリングデータを分析装置2へ取り込むようにしてもよい。
【0094】
<4−4>
GUI画面を出力する出力部は、ディスプレイの形態に限られず、プロッタ及び/又はプリンタ等であってもよい。
<4−5>
評価指標の種類は、上述したものに限られず、例えば、スイング動作により打ち返されたテニスボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせであってもよい。また、上記実施形態では、時刻毎のグリップ速度、グリップ加速度、ヘッド速度、ヘッド加速度、ヘッド速度成分比、及びラケット角速度の中から、評価指標として特に、ヘッド速度が最大となる時刻での値が選択された。しかしながら、別の特定のタイミング、例えば、それぞれの値が最大になる時刻におけるグリップ速度、グリップ加速度、ヘッド速度、ヘッド加速度、ヘッド速度成分比、及びラケット角速度等が選択されてもよい。
【0095】
<4−6>
サンプリングデータとして、素振りのデータを収集してもよい。
<4−7>
サンプル数は、適宜選択される値であり、例えば、1であってもよい。
【符号の説明】
【0096】
1 計測システム(サンプリング装置)
2 分析装置
50 プレーヤー(ユーザ)
10 テニスラケット
25 通信部(取得部)
231 分析プログラム
241 算出部
242 画面作成部(作成部)
100 分析システム
G1〜G4 グラフ領域
【特許請求の範囲】
【請求項1】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、
前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、
スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成する画面作成部と
を備える、
テニスのスイング動作の分析装置。
【請求項2】
前記GUI画面は、前記グラフ領域上に、前記複数の領域の境界を示すための補助線を表示する、
請求項1に記載の分析装置。
【請求項3】
前記GUI画面は、前記グラフ領域に含まれる前記複数の領域を異なる表示形式で表示する、
請求項1又は2に記載の分析装置。
【請求項4】
前記グラフ領域は、前記指標の第1方向の成分を第1軸とし、前記指標の前記第1方向と直交する第2方向の成分を前記第1軸と直交する第2軸とする領域である、
請求項1から3のいずれかに記載の分析装置。
【請求項5】
前記指標は、前記テニスラケットの速度である、
請求項4に記載に記載の分析装置。
【請求項6】
前記算出部は、第1指標及び第2指標を含む複数の種類の前記指標を算出し、
前記グラフ領域は、前記第1指標を第1軸とし、前記第2指標を前記第1軸と直交する第2軸とする領域である、
請求項1から5のいずれかに記載の分析装置。
【請求項7】
前記算出部は、前記スイング動作の単位毎に、前記指標を算出し、
前記GUI画面は、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示する、
請求項1から6のいずれかに記載の分析装置。
【請求項8】
前記取得部は、前記ユーザによる異なる前記テニスラケットの前記スイング動作をサンプリングした前記サンプリングデータを取得し、
前記算出部は、前記サンプリングデータに基づいて、前記異なるテニスラケットに属する前記スイング動作の単位毎に、前記指標を算出する、
請求項7に記載の分析装置。
【請求項9】
請求項1から8のいずれかに記載の分析装置と、
前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置と
を備える、テニスのスイング動作の分析システム。
【請求項10】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、
前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、
グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成する画面作成部と
を備える、
テニスのスイング動作の分析装置。
【請求項11】
請求項10に記載の分析装置と、
前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置と
を備える、テニスのスイング動作の分析システム。
【請求項12】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、
前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、
スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成するステップと
をコンピュータに実行させる、分析プログラム。
【請求項13】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、
前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、
グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成するステップと
をコンピュータに実行させる、分析プログラム。
【請求項1】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、
前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、
スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成する画面作成部と
を備える、
テニスのスイング動作の分析装置。
【請求項2】
前記GUI画面は、前記グラフ領域上に、前記複数の領域の境界を示すための補助線を表示する、
請求項1に記載の分析装置。
【請求項3】
前記GUI画面は、前記グラフ領域に含まれる前記複数の領域を異なる表示形式で表示する、
請求項1又は2に記載の分析装置。
【請求項4】
前記グラフ領域は、前記指標の第1方向の成分を第1軸とし、前記指標の前記第1方向と直交する第2方向の成分を前記第1軸と直交する第2軸とする領域である、
請求項1から3のいずれかに記載の分析装置。
【請求項5】
前記指標は、前記テニスラケットの速度である、
請求項4に記載に記載の分析装置。
【請求項6】
前記算出部は、第1指標及び第2指標を含む複数の種類の前記指標を算出し、
前記グラフ領域は、前記第1指標を第1軸とし、前記第2指標を前記第1軸と直交する第2軸とする領域である、
請求項1から5のいずれかに記載の分析装置。
【請求項7】
前記算出部は、前記スイング動作の単位毎に、前記指標を算出し、
前記GUI画面は、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示する、
請求項1から6のいずれかに記載の分析装置。
【請求項8】
前記取得部は、前記ユーザによる異なる前記テニスラケットの前記スイング動作をサンプリングした前記サンプリングデータを取得し、
前記算出部は、前記サンプリングデータに基づいて、前記異なるテニスラケットに属する前記スイング動作の単位毎に、前記指標を算出する、
請求項7に記載の分析装置。
【請求項9】
請求項1から8のいずれかに記載の分析装置と、
前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置と
を備える、テニスのスイング動作の分析システム。
【請求項10】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得する取得部と、
前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出する算出部と、
グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成する画面作成部と
を備える、
テニスのスイング動作の分析装置。
【請求項11】
請求項10に記載の分析装置と、
前記スイング動作をサンプリングして前記サンプリングデータを生成し、前記サンプリングデータを前記取得部に送信するサンプリング装置と
を備える、テニスのスイング動作の分析システム。
【請求項12】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、
前記サンプリングデータに基づいて、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、
スイングタイプを示す複数の領域に分割されたグラフ領域を表示するとともに、前記グラフ領域上に、前記指標を表示するGUI画面を作成するステップと
をコンピュータに実行させる、分析プログラム。
【請求項13】
ユーザによるテニスラケットのスイング動作をサンプリングしたサンプリングデータを取得するステップと、
前記サンプリングデータに基づいて、前記スイング動作の単位毎に、前記テニスラケット又は前記テニスラケットにより打たれたボールの速度、加速度、角速度及び位置、並びにこれらの任意の組み合わせの中から選択される指標を算出するステップと、
グラフ領域を表示するとともに、前記グラフ領域上に、複数の前記スイング動作の単位にそれぞれ対応する複数の前記指標を同時に表示するGUI画面を作成するステップと
をコンピュータに実行させる、分析プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−99524(P2013−99524A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−227271(P2012−227271)
【出願日】平成24年10月12日(2012.10.12)
【出願人】(504017809)ダンロップスポーツ株式会社 (701)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成24年10月12日(2012.10.12)
【出願人】(504017809)ダンロップスポーツ株式会社 (701)
[ Back to top ]