
テンティングの検出
【課題】患者の組織にプローブが及ぼす力を測定することと、力の測定工程中のプローブの変位を測定することと、を含む、方法を提供する。
【解決手段】プローブ22を含み、このプローブは、患者の組織にプローブが及ぼす力を測定するように構成された力センサー48と、力センサーが力を測定している間にプローブの変位を測定するように構成された位置トランスデューサー38と、を含む、プローブと、測定された力と測定された変位との関係に対応する組織のテンティングを検出するように構成されたプロセッサーと、を含む。
【解決手段】プローブ22を含み、このプローブは、患者の組織にプローブが及ぼす力を測定するように構成された力センサー48と、力センサーが力を測定している間にプローブの変位を測定するように構成された位置トランスデューサー38と、を含む、プローブと、測定された力と測定された変位との関係に対応する組織のテンティングを検出するように構成されたプロセッサーと、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概して医療処置に関し、具体的には、処置の間のテンティング(tenting)の検出に関する。
【背景技術】
【0002】
カテーテルプローブを用いる侵襲的医療処置は、典型的には、処置を受けている患者の内部組織と接触するプローブに関連する。そのような接触は典型的には組織に力を付加するプローブに関連し、それによってその力は組織の不要なテンティングを引き起こす場合がある。
【0003】
参照により本明細書に組み込まれるZhangの特許出願第2006/0173480号に記載されているシステムは、その主張によれば、体腔、器官、又は潜在的空間を貫通する器具(例えば、トロカール、針など)の挿入をより正確に制御するものである。その開示は、貫通器具に加速度計を連結することによって制御を達成することを説明している。
【0004】
参照により本特許出願に組み込まれる文書は、いずれかの用語が、それらの組み込まれた文書内で、本明細書で明示的又は暗黙的に行なわれる定義と相反するように定義される場合を除き、本出願の一体部分と見なされるべきであり、本明細書における定義のみが考慮されるべきである。
【0005】
上記の説明は、当該技術分野における関連技術の一般的な概論として提示されるものであり、その説明に含まれる情報のいずれかが本特許出願に対する先行技術を構成することを容認するものとして解釈するべきではない。
【発明の概要】
【課題を解決するための手段】
【0006】
本発明の一実施形態は、方法を提供するものであり、この方法は、
患者の組織にプローブが及ぼす力を測定することと、
その力を測定する間にプローブの変位を測定することと、
測定された力と測定された変位との関係に応じた組織のテンティングを検出することと、を含む。
【0007】
典型的には、テンティングを検出することは、測定された力の変化である第1の規模と、測定された変位である第2の規模との間の数学的に直線関係を含む関係を確認することを含む。この方法は、更に、測定された変位によって定められる方向において測定された力の変化を測定することを含むことができる。
【0008】
開示される実施形態において、力を測定することは、力の変化を測定することを含み、テンティングを検出することは、その力の変化が既定の力の変化の範囲より大きいことを決定することを含む。
【0009】
更なる開示される実施形態において、テンティングを検出することは、変位が既定の変位範囲より大きいことを決定することを含む。
【0010】
この方法は、測定された変位に対応するテンティングのサイズを測定することを含んでもよい。
【0011】
典型的には、この方法は、テンティングの検出に応答してプローブの操作者への警告を発することを含む。
【0012】
代替実施形態において、この方法は、テンティングの検出に応答して組織の座標マップを調整することを含む。典型的には、組織のテンティングは組織における円錐形成物を含み、座標マップの調整は、円錐形成物の頂点の場所なしに座標マップを作成することを含む。典型的には、座標マップの作成は円錐形成物の基部の場所を決定すること、及び基部の場所の座標を用いて座標マップを作成することと、を含む。
【0013】
別の代替実施形態で、この方法は、患者の心拍及び呼吸のうち少なくとも1つに応答して、測定された力を補正することを含む。
【0014】
本発明の一実施形態により、更に、装置が提供され、この装置は、
プローブを含み、このプローブは、
患者の組織にプローブが及ぼす力を測定するように構成された力センサーと、
力センサーが力を測定している間にプローブの変位を測定するように構成された位置トランスデューサーと、を含む、プローブと、
測定された力と測定された変位との関係に対応する組織のテンティングを検出するように構成されたプロセッサーと、を含む。
【0015】
本発明の一実施形態により、コンピュータプログラム指示が内部に記録された非一時的なコンピュータプログラムを有する有形のコンピュータ読み取り可能な媒体を含むコンピュータソフトウェア製品が更に提供され、この指示がコンピュータによって読み取られると、コンピュータは、
患者の組織にプローブが及ぼす力を測定し、
その力を測定する間にプローブの変位を測定し、
測定された力と測定された変位との関係に対応する組織のテンティングを検出する。
【0016】
本開示は、以下の発明を実施するための形態を、以下の図面と併せ読むことによって、より完全に理解されよう。
【図面の簡単な説明】
【0017】
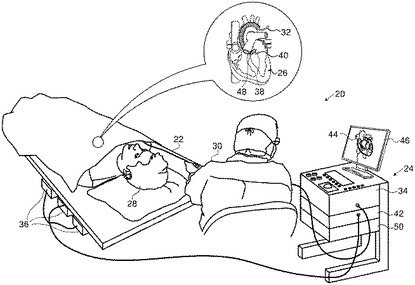
【図1】本発明の実施形態によるテンティング検出システムの略図。
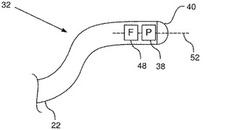
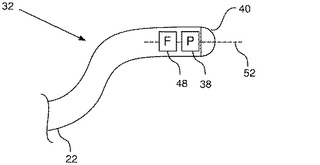
【図2】本発明の一実施形態によるシステムに使用されるプローブの遠位端部の略図。
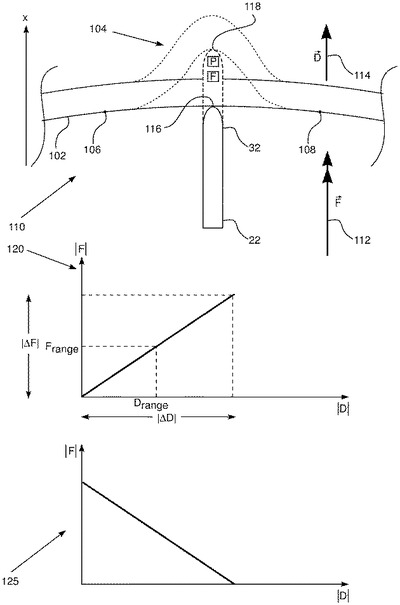
【図3】本発明の一実施形態による、プローブの操作中に生成され得るテンティング状態。
【図4】本発明の一実施形態による、プローブの操作中に生成され得る別のテンティング状態。
【図5】本発明の一実施形態による、テンティングを検出するためのプロセスのフローチャート。
【発明を実施するための形態】
【0018】
概論
本発明の一実施形態は、患者の体組織におけるテンティングを検出する方法を提供する。この方法は、典型的には、患者の心室へのプローブの挿入を含む医療処置を受けている患者に適用され得る。この方法は、体組織にプローブが及ぼす力を測定することを含む。この心臓処置のケースでは、組織は典型的には心内膜である。力が測定されている間、組織の変位もまた測定されるどちらの測定も、プローブ内のそれぞれ対応するセンサー、すなわちプローブの位置を測定するセンサー及び組織にプローブが及ぼす力を測定するセンサーを用いて行うことができる。
【0019】
テンティングは、測定された力の挙動を測定された変位の挙動と比較し、観察することによって、すなわち、それら2つのパラメーターがどのように関係するかを観察することによって検出され得る。典型的には、変位の方向において測定される力は変位が増加するにつれて増すならば、すなわち、力の規模と変位の規模との間に数学的な直線関係があるならば、テンティングが生じている。
【0020】
テンティングの間に生じる正比例の関係は、テンティングが生じない場合の典型的な関係と対照的である。心内膜にプローブが接触するケースでは、典型的には患者の心拍及び/又は呼吸はプローブの変位及びプローブによって測定される力の変化の両方を引き起こす。しかし、「正常」な、テンティングしていない状態では、力は典型的には変位が増加するにつれて減少するので、それら2つの数量は数学的に反比例の関係を有する。
【0021】
このように、力と、テンティングの間に生じる変位との間の直線関係は、テンティングの方向に関する明確で単純な指示を提供する。
【0022】
システムの説明
次に、本発明の実施形態による、テンティング検出システム20の略図である図1、及びそのシステムで使用されるプローブの遠位端部の略図である図2を参照する。システム20は、本例においては、カテーテルと仮定されるプローブ22、及び制御コンソール24を含む。本明細書に記載の実施形態において、プローブ22は、例えば、患者28の心臓26の電位図のマッピングのために使用され得るものと仮定する。代わりに又は加えて、プローブ22は、アブレーションのような、心臓又は別の体器官における他の治療及び/又は診察目的のためにも使用できる。
【0023】
コンソール24は、通常プローブ22からの信号を受信するため及び本明細書に記載のシステム20の他の構成要素を制御するためのフロントエンド及びインターフェース回路を有する、典型的には汎用コンピュータであるプロセッサー42を備える。プロセッサー42は、システムが使用する機能を実行するためにソフトウェアにプログラムされてもよく、プロセッサーはソフトウェアのためのデータをメモリ50に保存する。そのソフトウェアは、例えば、ネットワークを介して電子形式でコンソール24にダウンロードされてもよく、あるいは、光学的、磁気的又は電子的記憶メディアなどの非一時的な有形のメディア上に提供されてもよい。別法として、プロセッサー42の機能の一部又はすべてが、専用の又はプログラム可能なデジタルハードウェア構成要素によって実行されてもよい。
【0024】
操作者30が、プローブ22の遠位端部32が心臓26の心腔に進入するように、患者28の脈管系を通じてプローブ22を挿入する。システム20は通常、磁気位置検知を用いて、心臓26の内側における遠位端部の位置座標を決定する。この場合、コンソール24は駆動回路34を備えており、この駆動回路34は、患者28に対して外側の既知の位置、例えば、患者の胴体に配置された磁場発生器36を駆動する。プローブの遠位端部の内部の磁場センサー38は、コイルからの磁場に応答して電気位置信号を生成し、それによってプロセッサー42が心室内の遠位端部32の位置、すなわち場所及び典型的には配向もまた決定することを可能にする。本明細書でセンサー「P」とも呼ばれるセンサー38は、1つ以上であり通常は3つの、互いに直交するコイルを典型的には含む。この位置検知法は、例えば、Biosense Webster Inc.(カリフォルニア州Diamond Bar)が製造するCARTO(商標)システムにおいて実行されており、その詳細は米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT特許公開WO 96/05768、並びに米国特許出願公開第2002/0065455 A1号、同第2003/0120150 A1号及び同第2004/0068178 A1号に開示されており、その開示事項は参照により本願に組み込まれる。
【0025】
別の実施形態においては、位置センサー38及び磁場発生器36の役割は逆にされてもよい。換言すれば、駆動回路34が遠位端部32内の磁場発生器を駆動して、1つ以上の磁場を発生させてもよい。発生器36内のコイルは、磁場を検知し、それらの磁場の成分の振幅を示す信号を発生させるように構成されてもよい。心臓26内部の遠位端部32の位置を決定するために、プロセッサー42はこれらの信号を受信し、処理する。
【0026】
本例においてシステム20は磁気に基づくセンサーを用いて遠位端部32の位置を測定すると仮定されているが、本発明の実施形態は他の位置追跡技術(例えば、インピーダンス測定に基づく追跡システム)を用いてもよい。インピーダンスに基づく位置追跡技術については、例えば、同じくその開示内容を参照により本明細書に援用する米国特許第5,983,126号、同第6,456,864号、及び同第5,944,022号に述べられている。当業者に既知の他の位置追跡技術を使用して遠位端部32の位置を決定してもよい。したがって、本願では、「位置トランスデューサー」という用語は、コンソール24に対するプローブの又は例えばプローブ遠位端部のようなプローブの一部分の、場所及び配向にしたがって信号を提供する任意の要素を指すために用いられる。
【0027】
遠位端部32はまた、本明細書でセンサー「F」とも呼ばれる、遠位端部への力の規模及び方向を測定するためにプロセッサー42に電気的な力信号を提供することができる力センサー48もまた備える。力の方向は、典型的には、遠位端部の対称軸52に対して測定される。力の測定には様々な技法を用いることができる。この目的のために使用できる構成要素及び方法は、例えば、米国特許出願公開第2009/0093806号及び同第2009/0138007号に記載されており、それらの開示は参照により本願に組み込まれ、かつ本願の譲受人に譲渡される。これらの米国特許出願は、プローブの遠位末端にその遠位端部が、バネの充填されたジョイントにより連結された、プローブを開示し、バネの充填されたジョイントは遠位端部が組織に係合したときに加えられる圧力に対応して変形する。ジョイントの両側に送信コイル及び受信コイルを備える、プローブ内の磁気位置検知アセンブリは、プローブの遠位端部に対する遠位先端の位置を検知する。この相対的位置の変化はバネの変形を示すものであり、したがって、プローブ、すなわちその遠位先端への力の規模及び方向の指示を与える。
【0028】
心室26のマッピングをするために、操作者30は心室の内面上(又は内面のすぐ近く)の複数の場所に遠位端部32が置かれるようにプローブ22を操作する。各場所で、遠位端部に結合された電極40が、特定の生理学的特性(例えば、局所表面電位)を測定する。プロセッサー42は、センサー38の位置信号から導出された場所の測定値を電位測定値と相関する。したがって、システムは複数のマップポイントを収集し、各マップポイントは、内部の心室表面上の座標と、この座標におけるそれぞれの生理学的特性の測定値とを含んでいる。
【0029】
プロセッサー42はマップポイントの座標を用いて、問題の心室をシミュレートした表面を構成する疑似表面を構成する例示的な方法について、以下で更に説明する。次いで、プロセッサー42はそのシミュレートした表面とマップポイントの電位測定値を組み合わせて、そのシミュレートした表面と重なり合う電位マップを生成する。プロセッサー42は操作者30に対しマップの画像44をディスプレイ46に表示する。
【0030】
図3及び図4はそれぞれ、操作者30がプローブ22を操作中に生成され得る、本発明の実施形態にしたがった第1及び第2のテンティング状態を図示する。テンティングは、局所的な概ね円錐形成物の構造体、すなわち本明細書では心壁102と仮定する組織の「テント」であり、典型的には、組織の領域104への過度の力によって引き起こされて、その領域にテンティング円錐を形成する。過度の力は、典型的には、領域104を押すプローブの遠位端部によって引き起こされ、その領域と先端とが接触する場所がテントの頂点を形成する。領域の再構成の間、テンティング効果はその再構成でも円錐形成物すなわちテントとして観察され得る。
【0031】
プロセッサー42は、心壁のマップされた場所の最も外側のポイント一式を典型的には接続する表面再構成アルゴリズムを用いて壁の表面マップを生成することができる。例として、ポイント106及び108はマッピングされた一式のポイント内に含まれるものと仮定される。この場合、上述のように、領域104のようなテンティング領域はマップに有意な変形を引き起こす可能性がある。より深刻なのは、過度のテンティングがテンティング部位での心壁の穿孔に至る可能性である。本明細書に記載したように、本発明の実施形態はテンティングが生じていることを警告として操作者30に提供し、かつ、テンティングによって引き起こされた表面マップの変形の修正もまた行う。
【0032】
発明者らは、テンティングはプローブが力の方向に前進するにつれてプローブが接触する組織とプローブとの間の力が増加するときに典型的に生じることを観察した。そのようなシナリオは、プローブの遠位端部が組織と真正面から係合した場合に典型的に生じる。あるいは別のシナリオは、プローブの周囲のガイディングシースがプローブを拘束してプローブが真正面からではなく斜めの方向で組織と係合したときに生じる。この場合、組織に対するプローブの配向は斜めであり、プローブの運動方向は組織上の分解された力と同じ方向である。どちらの場合も、力の規模及び変位の規模は数学的に互いに直線的関係にあり、すなわち、力の規模が増加するにつれて変位の規模もまた増加する。
【0033】
後者の特性は、「正常な」心壁と接触しているプローブの典型的なケースと対照的であり、心臓の鼓動及び/又は呼吸によって心壁がプローブから離れるにつれて、プローブによって測定される力の規模は減少し、一方、変位の規模は増加する。そのような数学的反比例の関係、すなわち、変位が増加するにつれて力が減少する関係は、プローブと心壁の接触が真正面であるか斜めであるかにかかわらず生じる。
【0034】
線図110(図3)は、遠位端部32が心壁102と接触してそれに力を及ぼしている第1のテンティング状態を図示する。この状態で、プローブ22は壁102と真正面から係合している。矢印112は力センサーFによって測定される、領域104にプローブが及ぼす力ベクトルを表す。矢印114は、テンティングが生じ始める位置116から領域104のテンティングが終わる位置118までのプローブの変位ベクトルを表す。例として、変位の方向は領域104の局所x軸の方向を定めると仮定する。位置118は領域104内に形成されたテンティング円錐の頂点に対応し、変位ベクトルは位置センサーPによって測定される場所から導出することができる。線図に示されているように、力ベクトルと変位ベクトルは平行である。
【0035】
概略的グラフ120は、テンティング状態が発展するにつれての、すなわちプローブの遠位端部が位置116から位置118へ移動するにつれての力の規模|F|対変位の規模|D|のプロットである。右上方へ勾配するグラフが示すように、このテンティングでは2つの規模は正比例の関係にある。
【0036】
比較として、概略的グラフ125は、心臓の鼓動及び/又は呼吸による心壁の運動の間にテンティングが存在しないときの力の規模|F|対変位の規模|D|のプロットである。テンティングがないこのケースでは、変位の規模が増加するにつれて力の規模は減少し、したがってそれら2つの規模は反比例の関係にある。これは、右下方へ勾配するグラフによって図示されている。
【0037】
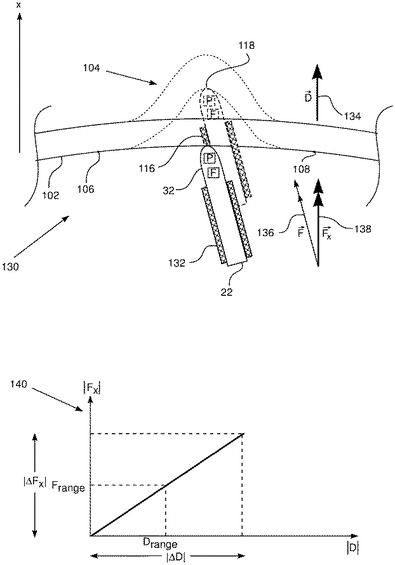
線図130(図4)は、遠位端部32が心壁102と接触してそれに力を及ぼしている第2のテンティング状態を図示する。この第2の状態で、プローブ22はシース132によって拘束されて、壁102と斜めに係合する。矢印114と実質的に同じ矢印134は、最初のテンティング位置116からのプローブの変位ベクトルを表す。矢印136はプローブによって領域104に及ぶ全体的な力ベクトルを表し、矢印138は変位の方向すなわちx軸に平行な方向における分解された力ベクトルを表す。第2のテンティング状態で、全体的な力の方向は変位と平行ではなく、一実施形態では、変位の方向において分解された力の規模は典型的には、傾斜の度に依存して、全体的な力の規模の値の約80%程度である。80%は約30度の傾斜に対応するが、本発明の実施形態は30度より大きくても小さくてもよく、例えば、45度であってもよい他の角度も包含する。
【0038】
概略的グラフ140は、第2のテンティング状態の発展につれた、分解された力の規模|FX|対変位の規模|D|のプロットである。グラフが示すように、第2のテンティング状態の2つの規模もまた正比例の関係である。
【0039】
図120及び140のグラフに示したFrange、Drange、|ΔD|、|ΔF|、|ΔFX|の数量について、図5のフローチャートを参照して以下に説明する。
【0040】
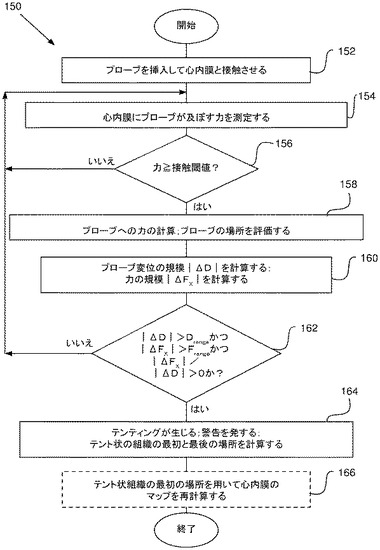
図5は、本発明の一実施形態による、テンティングを検出するためのプロセスのフローチャート150である。このプロセスは、力と変位との関係に関して図3及び4を参照して上述した特徴を用い、例えば、心内膜におけるテンティングを検出することを目的とする。
【0041】
第1の工程152で、操作者30は、プローブの遠位端部32が心室26に入るようにプローブ22を患者28に挿入する。心内膜に接触するまでプローブを挿入する。心内膜との接触は、電極40の電位が心内膜によって生成される電位に相当することを観察すること、力センサー48によって測定された力がセンサーのゼロレベルより高いかどうかを決定すること、及び/又は位置センサー38が記録した位置が心内膜の座標に相当するかを決定することなど、数々の異なる方法によって検出できる。心内膜の座標は、位置センサー38での先の測定を基に決定してもよく、及び/又は、超音波、蛍光法、又は磁気共鳴映像法を用いるシステムによる心臓26の撮像によって決定してもよい。
【0042】
工程152で、図3の略図が示すように、周囲を取り巻くシースのないプローブを心内膜と接触するように挿入することができる。あるいは、プローブは、図4に図示されるように周囲を取り巻くシースを有してもよい。
【0043】
力の測定工程154で、プロセッサー42は力センサー48からの信号を用い、プローブ22の遠位端部が心内膜の組織に及ぼす力の規模を計算する。プロセッサーはまた、その信号を基に遠位端部の対称軸52に対する力の方向(図2)も評価する。
【0044】
第1の比較工程156で、プロセッサーは力の規模が既定の接触閾値と同等又はそれ以上であるかを確認する。接触閾値の典型的な値は約3gである。規模が接触閾値未満であれば、プロセスは工程154に戻る。規模が閾値を超えていれば、プロセッサー42は力及び変位測定工程158に進む。
【0045】
力及び変位測定工程158で、プロセッサーは、力の規模が工程156で用いられた接触閾値より大きい間に、規模の値及び力の方向を計算する。同時にプロセッサー42は位置センサー38からの信号を用いてプローブの遠位端部の場所を評価する。本明細書で測定期間と呼ぶ時間にかけてそれらの値が測定されるものと仮定する。プロセッサーは力の規模及び方向の値及び場所の値をメモリ50に保存する。
【0046】
評価工程160で、プロセッサーはメモリ50内に保存された値を分析する。
【0047】
場所の値の分析を基に、プロセッサーは、測定期間の遠位端部の最後の場所と最初の場所との差から遠位端部の全体的な変位ベクトルを決定する。
【数1】

変位ベクトルは
【数2】
方向及び規模を有し、本明細書では方向は局所x軸の方向を画定するものと仮定する(図3及び4に図示)。プロセッサーは、全体的な変位の規模|ΔD|もまた計算する。グラフ120及び140では変位の規模|ΔD|を使用する。
【0048】
力の測定値の分析を基に、プロセッサーは測定期間中の力の方向を決定する。典型的には、シースのないプローブでは力の方向は全体的な変位の方向と平行であり、すなわち、図3に示すように局所x軸に平行である。典型的には、シースのあるプローブでは力の方向はシースと平行であり、図4に示すように局所x軸に対して斜めである。
【0049】
測定期間に得られたそれぞれの力の測定値に対して、プロセッサーは方向として及び規模|F|として力ベクトル
【数3】
を計算する。プロセッサーは局所x軸に沿って力ベクトル
【数4】
を分解し、力の分解の規模|FX|を決定する(図3の真正面のケースでは分解された力と分解されない力は等しいが、図4の斜めのケースでは分解された力は分解されない力より小さい)。遠位端部の最後の場所及び最初の場所にそれぞれ対応する最後及び最初の分解された力の規模を基に、プロセッサーは、分解された力の規模|ΔFX|の全体的な変化の値を計算する。グラフ140は、分解された力の規模|ΔFX|の変化を図示する。グラフ120は真正面での状態|ΔF|≡|ΔFX|に関するものであるので、全体的な力の規模|ΔF|の変化を図示する。
【0050】
第2の比較工程162で、プロセッサーは以下の不等式の有効性を確認する。
【数5】
【0051】
Drange及びFrangeは、プロセッサー42が用いる|ΔD|及び|ΔFX|の既定の最小範囲であり、グラフ120及び140に図示されている。典型的には、Drangeの値は約4mmであり、Frangeの値は約8gである。プロセッサーは、不等式(3)を確認するために用いる値が小さすぎないことを確認するために不等式(1)及び(2)を用いる。小さすぎる値を用いると、例えば、ノイズによって、不等式(3)の確認に悪い影響が及ぶ場合がある。
【0052】
不等式(3)の有効性は、|ΔD|と|ΔFX|の関係が数学的に直線関係であり、したがって変位の規模が増加するにつれて分解された力の規模もまた増加することを決定する。この正比例の関係をグラフ120及び140に図示する。
【0053】
不等式(3)は患者の心臓の鼓動及び呼吸の間は典型的には無効であり、この場合、変位の規模が増加するにつれて分解された力の規模は減少するので、反比例の関係である。そのような反比例の関係をグラフ125に図示する。したがって、不等式(3)が有効であることは、テンティングが生じていること及び、力及び変位の変化が心臓の正常な挙動に典型的なものではないことの確認である。
【0054】
不等式(1)、(2)、(3)のいずれかが無効であれば、フローチャートは工程154に戻る。
【0055】
不等式(1)、(2)、(3)のすべてが有効であれば、プロセッサーは警告工程164に進む。
【0056】
警告工程164で、プロセッサーはテンティングが生じている可能性があると仮定し、例えば、テンティングが生じている可能性があるという通知をディスプレイ46に表示することによって、可視及び/又は可聴の警告を操作者30に対して発する。プロセッサーはまた、テント状になった組織の最初の場所116(図3及び図4)(テンティングが始まるポイント)、テント状になった組織の最後の場所118及び、形成されたテントの頂点を見つけるために、メモリ50に保存された結果を用いてテンティングのサイズも計算することができる。このサイズを警告に含めてもよい。いくつかの実施形態で、テンティングのサイズが既定値より大きい場合は、危険である可能性のある状態を反映するために警告を強めてもよい。危険なテンティングのサイズは、典型的には、テンティングになっている組織の厚さに依存する。組織の厚さは、例えば場所116の知識から知ること又は予測することができる。あるいは、又は加えて、
【数6】
においてQが正の値であり典型的には2g/mmより大きい場合は危険な状態であると仮定することができる。
【0057】
任意選択的マッピング工程166(フローチャートで破線により任意選択であることを示している)は、典型的には、プロセッサーがマッピングアルゴリズムを用いて心内膜の場所のマップを生成しているならば実施される。工程166で、プロセッサーはテント頂点の場所118を、工程164で計算されたテント状態の組織の最初の場所116と置換し、組織の場所としてこの値を用いる。置換された場所は、マッピングアルゴリズムを用いるマップの再計算に用いられる。
【0058】
フローチャート150はここで終わる。
【0059】
フローチャート150の工程の説明は、力センサーFが測定した力が患者の心拍及び/又は呼吸のために補正を一切受けなかったものと仮定している。本発明のいくつかの実施形態は、例えば、力センサーに対する典型的な力対時間の関係を決定するために多数の心拍及び呼吸周期にかけて「典型的な」心臓から力センサーに付加される力を測定又は推定することによって、そのような補正を適用することができる。プロセッサーは、テンティングが生じている可能性があるときに期待される典型的な力の測定値を見出すためにその関係を用いて、力センサーによって測定された実際の力からそれらの典型的な力の測定値を減算することができる。次いで、補正された力を上記の不等式(2)及び(3)に用いることができる。
【0060】
上述した実施形態は一例として記載されたものであり、本発明は、本明細書において上に具体的に図示及び説明した内容に限定されないことが明らかとなろう。その逆に、本発明の範囲は、上記に述べた異なる特性のすべてのものの組み合わせ及び一部のものの組み合わせを含み、更に上記の説明文を読むことで当業者によって想到されるであろう、先行技術には開示されていない変形例及び改変例をも含むものである。
【0061】
〔実施の態様〕
(1) 方法であって、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を含む、方法。
(2) 前記テンティングを検出することが、前記測定された力の変化である第1の規模と、前記測定された変位である第2の規模との間の数学的な直線関係(mathematically direct relationship)を前記関係が含むことを確認することを含む、実施態様1に記載の方法。
(3) 前記測定された変位によって画定された方向における前記測定された力の変化を測定することを含む、実施態様2に記載の方法。
(4) 前記力を測定することが、前記力の変化を測定することを含み、前記テンティングを検出することが、前記力の変化が既定の力の変化の範囲より大きいことを決定することを含む、実施態様1に記載の方法。
(5) 前記テンティングを検出することが、前記変位が既定の変位の範囲より大きいことを決定することを含む、実施態様1に記載の方法。
(6) 前記測定された変位に対応する前記テンティングのサイズを測定することを含む、実施態様1に記載の方法。
(7) 前記テンティングの検出に応答して前記プローブの操作者に警告を発することを含む、実施態様1に記載の方法。
(8) 前記テンティングの検出に応答して前記組織の座標のマップを調整することを含む、実施態様1に記載の方法。
(9) 前記組織の前記テンティングが、前記組織の円錐形成物を含み、前記マップを調整することが、前記円錐形成物の頂点の場所なしに前記マップを作成することを含む、実施態様8に記載の方法。
(10) 前記マップを作成することが、前記円錐形成物の基部の場所を決定すること及び前記基部の場所の座標を用いて前記マップを作成することを含む、実施態様8に記載の方法。
【0062】
(11) 前記患者の心拍及び呼吸の少なくとも1つに応答して、前記測定された力を補正することを含む、実施態様1に記載の方法。
(12) 装置であって、
プローブであって、
患者の組織に前記プローブが及ぼす力を測定するように構成された力センサーと、
前記力センサーが前記力を測定している間に前記プローブの変位を測定するように構成された位置トランスデューサーと、を含む、プローブと、
前記測定された力と前記測定された変位との関係に対応する前記組織のテンティングを検出するように構成されたプロセッサーと、を含む、装置。
(13) 前記テンティングを検出することが、前記測定された力の変化である第1の規模と、前記測定された変位である第2の規模との間の数学的な直線関係を前記関係が含むことを確認することを含む、実施態様12に記載の装置。
(14) 前記プロセッサが、前記測定された変位によって画定された方向における前記測定された力の変化を測定するように構成される、実施態様13に記載の装置。
(15) 前記力を測定することが前記力の変化を測定することを含み、前記テンティングを検出することが、前記力の変化が既定の力の変化の範囲より大きいことを決定することを含む、実施態様12に記載の装置。
(16) 前記テンティングを検出することが、前記変位が既定の変位の範囲より大きいことを決定することを含む、実施態様12に記載の装置。
(17) 前記プロセッサが、前記測定された変位に対応する前記テンティングのサイズを測定するように構成される、実施態様12に記載の装置。
(18) 前記プロセッサが、前記テンティングの検出に応答して前記組織の座標のマップを調整するように構成される、実施態様12に記載の装置。
(19) 前記組織の前記テンティングが、前記組織の円錐形成物を含み、前記マップを調整することが、前記円錐形成物の頂点の場所なしに前記マップを作成することを含む、実施態様18に記載の装置。
(20) 前記マップを作成することが、前記円錐形成物の基部の場所を決定すること及び前記基部の場所の座標を用いて前記マップを作成することを含む、実施態様18に記載の装置。
【0063】
(21) 前記プロセッサが、前記患者の心拍及び呼吸の少なくとも1つに応答して前記測定された力を補正するように構成される、実施態様12に記載の装置。
(22) コンピュータソフトウェア製品であって、内部に記録された非一時的なコンピュータプログラム指示を有する有形のコンピュータ読み取り可能な媒体を備え、前記指示がコンピュータによって読み取られると、前記コンピュータが、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を実行する、コンピュータソフトウェア製品。
【技術分野】
【0001】
本発明は、概して医療処置に関し、具体的には、処置の間のテンティング(tenting)の検出に関する。
【背景技術】
【0002】
カテーテルプローブを用いる侵襲的医療処置は、典型的には、処置を受けている患者の内部組織と接触するプローブに関連する。そのような接触は典型的には組織に力を付加するプローブに関連し、それによってその力は組織の不要なテンティングを引き起こす場合がある。
【0003】
参照により本明細書に組み込まれるZhangの特許出願第2006/0173480号に記載されているシステムは、その主張によれば、体腔、器官、又は潜在的空間を貫通する器具(例えば、トロカール、針など)の挿入をより正確に制御するものである。その開示は、貫通器具に加速度計を連結することによって制御を達成することを説明している。
【0004】
参照により本特許出願に組み込まれる文書は、いずれかの用語が、それらの組み込まれた文書内で、本明細書で明示的又は暗黙的に行なわれる定義と相反するように定義される場合を除き、本出願の一体部分と見なされるべきであり、本明細書における定義のみが考慮されるべきである。
【0005】
上記の説明は、当該技術分野における関連技術の一般的な概論として提示されるものであり、その説明に含まれる情報のいずれかが本特許出願に対する先行技術を構成することを容認するものとして解釈するべきではない。
【発明の概要】
【課題を解決するための手段】
【0006】
本発明の一実施形態は、方法を提供するものであり、この方法は、
患者の組織にプローブが及ぼす力を測定することと、
その力を測定する間にプローブの変位を測定することと、
測定された力と測定された変位との関係に応じた組織のテンティングを検出することと、を含む。
【0007】
典型的には、テンティングを検出することは、測定された力の変化である第1の規模と、測定された変位である第2の規模との間の数学的に直線関係を含む関係を確認することを含む。この方法は、更に、測定された変位によって定められる方向において測定された力の変化を測定することを含むことができる。
【0008】
開示される実施形態において、力を測定することは、力の変化を測定することを含み、テンティングを検出することは、その力の変化が既定の力の変化の範囲より大きいことを決定することを含む。
【0009】
更なる開示される実施形態において、テンティングを検出することは、変位が既定の変位範囲より大きいことを決定することを含む。
【0010】
この方法は、測定された変位に対応するテンティングのサイズを測定することを含んでもよい。
【0011】
典型的には、この方法は、テンティングの検出に応答してプローブの操作者への警告を発することを含む。
【0012】
代替実施形態において、この方法は、テンティングの検出に応答して組織の座標マップを調整することを含む。典型的には、組織のテンティングは組織における円錐形成物を含み、座標マップの調整は、円錐形成物の頂点の場所なしに座標マップを作成することを含む。典型的には、座標マップの作成は円錐形成物の基部の場所を決定すること、及び基部の場所の座標を用いて座標マップを作成することと、を含む。
【0013】
別の代替実施形態で、この方法は、患者の心拍及び呼吸のうち少なくとも1つに応答して、測定された力を補正することを含む。
【0014】
本発明の一実施形態により、更に、装置が提供され、この装置は、
プローブを含み、このプローブは、
患者の組織にプローブが及ぼす力を測定するように構成された力センサーと、
力センサーが力を測定している間にプローブの変位を測定するように構成された位置トランスデューサーと、を含む、プローブと、
測定された力と測定された変位との関係に対応する組織のテンティングを検出するように構成されたプロセッサーと、を含む。
【0015】
本発明の一実施形態により、コンピュータプログラム指示が内部に記録された非一時的なコンピュータプログラムを有する有形のコンピュータ読み取り可能な媒体を含むコンピュータソフトウェア製品が更に提供され、この指示がコンピュータによって読み取られると、コンピュータは、
患者の組織にプローブが及ぼす力を測定し、
その力を測定する間にプローブの変位を測定し、
測定された力と測定された変位との関係に対応する組織のテンティングを検出する。
【0016】
本開示は、以下の発明を実施するための形態を、以下の図面と併せ読むことによって、より完全に理解されよう。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態によるテンティング検出システムの略図。
【図2】本発明の一実施形態によるシステムに使用されるプローブの遠位端部の略図。
【図3】本発明の一実施形態による、プローブの操作中に生成され得るテンティング状態。
【図4】本発明の一実施形態による、プローブの操作中に生成され得る別のテンティング状態。
【図5】本発明の一実施形態による、テンティングを検出するためのプロセスのフローチャート。
【発明を実施するための形態】
【0018】
概論
本発明の一実施形態は、患者の体組織におけるテンティングを検出する方法を提供する。この方法は、典型的には、患者の心室へのプローブの挿入を含む医療処置を受けている患者に適用され得る。この方法は、体組織にプローブが及ぼす力を測定することを含む。この心臓処置のケースでは、組織は典型的には心内膜である。力が測定されている間、組織の変位もまた測定されるどちらの測定も、プローブ内のそれぞれ対応するセンサー、すなわちプローブの位置を測定するセンサー及び組織にプローブが及ぼす力を測定するセンサーを用いて行うことができる。
【0019】
テンティングは、測定された力の挙動を測定された変位の挙動と比較し、観察することによって、すなわち、それら2つのパラメーターがどのように関係するかを観察することによって検出され得る。典型的には、変位の方向において測定される力は変位が増加するにつれて増すならば、すなわち、力の規模と変位の規模との間に数学的な直線関係があるならば、テンティングが生じている。
【0020】
テンティングの間に生じる正比例の関係は、テンティングが生じない場合の典型的な関係と対照的である。心内膜にプローブが接触するケースでは、典型的には患者の心拍及び/又は呼吸はプローブの変位及びプローブによって測定される力の変化の両方を引き起こす。しかし、「正常」な、テンティングしていない状態では、力は典型的には変位が増加するにつれて減少するので、それら2つの数量は数学的に反比例の関係を有する。
【0021】
このように、力と、テンティングの間に生じる変位との間の直線関係は、テンティングの方向に関する明確で単純な指示を提供する。
【0022】
システムの説明
次に、本発明の実施形態による、テンティング検出システム20の略図である図1、及びそのシステムで使用されるプローブの遠位端部の略図である図2を参照する。システム20は、本例においては、カテーテルと仮定されるプローブ22、及び制御コンソール24を含む。本明細書に記載の実施形態において、プローブ22は、例えば、患者28の心臓26の電位図のマッピングのために使用され得るものと仮定する。代わりに又は加えて、プローブ22は、アブレーションのような、心臓又は別の体器官における他の治療及び/又は診察目的のためにも使用できる。
【0023】
コンソール24は、通常プローブ22からの信号を受信するため及び本明細書に記載のシステム20の他の構成要素を制御するためのフロントエンド及びインターフェース回路を有する、典型的には汎用コンピュータであるプロセッサー42を備える。プロセッサー42は、システムが使用する機能を実行するためにソフトウェアにプログラムされてもよく、プロセッサーはソフトウェアのためのデータをメモリ50に保存する。そのソフトウェアは、例えば、ネットワークを介して電子形式でコンソール24にダウンロードされてもよく、あるいは、光学的、磁気的又は電子的記憶メディアなどの非一時的な有形のメディア上に提供されてもよい。別法として、プロセッサー42の機能の一部又はすべてが、専用の又はプログラム可能なデジタルハードウェア構成要素によって実行されてもよい。
【0024】
操作者30が、プローブ22の遠位端部32が心臓26の心腔に進入するように、患者28の脈管系を通じてプローブ22を挿入する。システム20は通常、磁気位置検知を用いて、心臓26の内側における遠位端部の位置座標を決定する。この場合、コンソール24は駆動回路34を備えており、この駆動回路34は、患者28に対して外側の既知の位置、例えば、患者の胴体に配置された磁場発生器36を駆動する。プローブの遠位端部の内部の磁場センサー38は、コイルからの磁場に応答して電気位置信号を生成し、それによってプロセッサー42が心室内の遠位端部32の位置、すなわち場所及び典型的には配向もまた決定することを可能にする。本明細書でセンサー「P」とも呼ばれるセンサー38は、1つ以上であり通常は3つの、互いに直交するコイルを典型的には含む。この位置検知法は、例えば、Biosense Webster Inc.(カリフォルニア州Diamond Bar)が製造するCARTO(商標)システムにおいて実行されており、その詳細は米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT特許公開WO 96/05768、並びに米国特許出願公開第2002/0065455 A1号、同第2003/0120150 A1号及び同第2004/0068178 A1号に開示されており、その開示事項は参照により本願に組み込まれる。
【0025】
別の実施形態においては、位置センサー38及び磁場発生器36の役割は逆にされてもよい。換言すれば、駆動回路34が遠位端部32内の磁場発生器を駆動して、1つ以上の磁場を発生させてもよい。発生器36内のコイルは、磁場を検知し、それらの磁場の成分の振幅を示す信号を発生させるように構成されてもよい。心臓26内部の遠位端部32の位置を決定するために、プロセッサー42はこれらの信号を受信し、処理する。
【0026】
本例においてシステム20は磁気に基づくセンサーを用いて遠位端部32の位置を測定すると仮定されているが、本発明の実施形態は他の位置追跡技術(例えば、インピーダンス測定に基づく追跡システム)を用いてもよい。インピーダンスに基づく位置追跡技術については、例えば、同じくその開示内容を参照により本明細書に援用する米国特許第5,983,126号、同第6,456,864号、及び同第5,944,022号に述べられている。当業者に既知の他の位置追跡技術を使用して遠位端部32の位置を決定してもよい。したがって、本願では、「位置トランスデューサー」という用語は、コンソール24に対するプローブの又は例えばプローブ遠位端部のようなプローブの一部分の、場所及び配向にしたがって信号を提供する任意の要素を指すために用いられる。
【0027】
遠位端部32はまた、本明細書でセンサー「F」とも呼ばれる、遠位端部への力の規模及び方向を測定するためにプロセッサー42に電気的な力信号を提供することができる力センサー48もまた備える。力の方向は、典型的には、遠位端部の対称軸52に対して測定される。力の測定には様々な技法を用いることができる。この目的のために使用できる構成要素及び方法は、例えば、米国特許出願公開第2009/0093806号及び同第2009/0138007号に記載されており、それらの開示は参照により本願に組み込まれ、かつ本願の譲受人に譲渡される。これらの米国特許出願は、プローブの遠位末端にその遠位端部が、バネの充填されたジョイントにより連結された、プローブを開示し、バネの充填されたジョイントは遠位端部が組織に係合したときに加えられる圧力に対応して変形する。ジョイントの両側に送信コイル及び受信コイルを備える、プローブ内の磁気位置検知アセンブリは、プローブの遠位端部に対する遠位先端の位置を検知する。この相対的位置の変化はバネの変形を示すものであり、したがって、プローブ、すなわちその遠位先端への力の規模及び方向の指示を与える。
【0028】
心室26のマッピングをするために、操作者30は心室の内面上(又は内面のすぐ近く)の複数の場所に遠位端部32が置かれるようにプローブ22を操作する。各場所で、遠位端部に結合された電極40が、特定の生理学的特性(例えば、局所表面電位)を測定する。プロセッサー42は、センサー38の位置信号から導出された場所の測定値を電位測定値と相関する。したがって、システムは複数のマップポイントを収集し、各マップポイントは、内部の心室表面上の座標と、この座標におけるそれぞれの生理学的特性の測定値とを含んでいる。
【0029】
プロセッサー42はマップポイントの座標を用いて、問題の心室をシミュレートした表面を構成する疑似表面を構成する例示的な方法について、以下で更に説明する。次いで、プロセッサー42はそのシミュレートした表面とマップポイントの電位測定値を組み合わせて、そのシミュレートした表面と重なり合う電位マップを生成する。プロセッサー42は操作者30に対しマップの画像44をディスプレイ46に表示する。
【0030】
図3及び図4はそれぞれ、操作者30がプローブ22を操作中に生成され得る、本発明の実施形態にしたがった第1及び第2のテンティング状態を図示する。テンティングは、局所的な概ね円錐形成物の構造体、すなわち本明細書では心壁102と仮定する組織の「テント」であり、典型的には、組織の領域104への過度の力によって引き起こされて、その領域にテンティング円錐を形成する。過度の力は、典型的には、領域104を押すプローブの遠位端部によって引き起こされ、その領域と先端とが接触する場所がテントの頂点を形成する。領域の再構成の間、テンティング効果はその再構成でも円錐形成物すなわちテントとして観察され得る。
【0031】
プロセッサー42は、心壁のマップされた場所の最も外側のポイント一式を典型的には接続する表面再構成アルゴリズムを用いて壁の表面マップを生成することができる。例として、ポイント106及び108はマッピングされた一式のポイント内に含まれるものと仮定される。この場合、上述のように、領域104のようなテンティング領域はマップに有意な変形を引き起こす可能性がある。より深刻なのは、過度のテンティングがテンティング部位での心壁の穿孔に至る可能性である。本明細書に記載したように、本発明の実施形態はテンティングが生じていることを警告として操作者30に提供し、かつ、テンティングによって引き起こされた表面マップの変形の修正もまた行う。
【0032】
発明者らは、テンティングはプローブが力の方向に前進するにつれてプローブが接触する組織とプローブとの間の力が増加するときに典型的に生じることを観察した。そのようなシナリオは、プローブの遠位端部が組織と真正面から係合した場合に典型的に生じる。あるいは別のシナリオは、プローブの周囲のガイディングシースがプローブを拘束してプローブが真正面からではなく斜めの方向で組織と係合したときに生じる。この場合、組織に対するプローブの配向は斜めであり、プローブの運動方向は組織上の分解された力と同じ方向である。どちらの場合も、力の規模及び変位の規模は数学的に互いに直線的関係にあり、すなわち、力の規模が増加するにつれて変位の規模もまた増加する。
【0033】
後者の特性は、「正常な」心壁と接触しているプローブの典型的なケースと対照的であり、心臓の鼓動及び/又は呼吸によって心壁がプローブから離れるにつれて、プローブによって測定される力の規模は減少し、一方、変位の規模は増加する。そのような数学的反比例の関係、すなわち、変位が増加するにつれて力が減少する関係は、プローブと心壁の接触が真正面であるか斜めであるかにかかわらず生じる。
【0034】
線図110(図3)は、遠位端部32が心壁102と接触してそれに力を及ぼしている第1のテンティング状態を図示する。この状態で、プローブ22は壁102と真正面から係合している。矢印112は力センサーFによって測定される、領域104にプローブが及ぼす力ベクトルを表す。矢印114は、テンティングが生じ始める位置116から領域104のテンティングが終わる位置118までのプローブの変位ベクトルを表す。例として、変位の方向は領域104の局所x軸の方向を定めると仮定する。位置118は領域104内に形成されたテンティング円錐の頂点に対応し、変位ベクトルは位置センサーPによって測定される場所から導出することができる。線図に示されているように、力ベクトルと変位ベクトルは平行である。
【0035】
概略的グラフ120は、テンティング状態が発展するにつれての、すなわちプローブの遠位端部が位置116から位置118へ移動するにつれての力の規模|F|対変位の規模|D|のプロットである。右上方へ勾配するグラフが示すように、このテンティングでは2つの規模は正比例の関係にある。
【0036】
比較として、概略的グラフ125は、心臓の鼓動及び/又は呼吸による心壁の運動の間にテンティングが存在しないときの力の規模|F|対変位の規模|D|のプロットである。テンティングがないこのケースでは、変位の規模が増加するにつれて力の規模は減少し、したがってそれら2つの規模は反比例の関係にある。これは、右下方へ勾配するグラフによって図示されている。
【0037】
線図130(図4)は、遠位端部32が心壁102と接触してそれに力を及ぼしている第2のテンティング状態を図示する。この第2の状態で、プローブ22はシース132によって拘束されて、壁102と斜めに係合する。矢印114と実質的に同じ矢印134は、最初のテンティング位置116からのプローブの変位ベクトルを表す。矢印136はプローブによって領域104に及ぶ全体的な力ベクトルを表し、矢印138は変位の方向すなわちx軸に平行な方向における分解された力ベクトルを表す。第2のテンティング状態で、全体的な力の方向は変位と平行ではなく、一実施形態では、変位の方向において分解された力の規模は典型的には、傾斜の度に依存して、全体的な力の規模の値の約80%程度である。80%は約30度の傾斜に対応するが、本発明の実施形態は30度より大きくても小さくてもよく、例えば、45度であってもよい他の角度も包含する。
【0038】
概略的グラフ140は、第2のテンティング状態の発展につれた、分解された力の規模|FX|対変位の規模|D|のプロットである。グラフが示すように、第2のテンティング状態の2つの規模もまた正比例の関係である。
【0039】
図120及び140のグラフに示したFrange、Drange、|ΔD|、|ΔF|、|ΔFX|の数量について、図5のフローチャートを参照して以下に説明する。
【0040】
図5は、本発明の一実施形態による、テンティングを検出するためのプロセスのフローチャート150である。このプロセスは、力と変位との関係に関して図3及び4を参照して上述した特徴を用い、例えば、心内膜におけるテンティングを検出することを目的とする。
【0041】
第1の工程152で、操作者30は、プローブの遠位端部32が心室26に入るようにプローブ22を患者28に挿入する。心内膜に接触するまでプローブを挿入する。心内膜との接触は、電極40の電位が心内膜によって生成される電位に相当することを観察すること、力センサー48によって測定された力がセンサーのゼロレベルより高いかどうかを決定すること、及び/又は位置センサー38が記録した位置が心内膜の座標に相当するかを決定することなど、数々の異なる方法によって検出できる。心内膜の座標は、位置センサー38での先の測定を基に決定してもよく、及び/又は、超音波、蛍光法、又は磁気共鳴映像法を用いるシステムによる心臓26の撮像によって決定してもよい。
【0042】
工程152で、図3の略図が示すように、周囲を取り巻くシースのないプローブを心内膜と接触するように挿入することができる。あるいは、プローブは、図4に図示されるように周囲を取り巻くシースを有してもよい。
【0043】
力の測定工程154で、プロセッサー42は力センサー48からの信号を用い、プローブ22の遠位端部が心内膜の組織に及ぼす力の規模を計算する。プロセッサーはまた、その信号を基に遠位端部の対称軸52に対する力の方向(図2)も評価する。
【0044】
第1の比較工程156で、プロセッサーは力の規模が既定の接触閾値と同等又はそれ以上であるかを確認する。接触閾値の典型的な値は約3gである。規模が接触閾値未満であれば、プロセスは工程154に戻る。規模が閾値を超えていれば、プロセッサー42は力及び変位測定工程158に進む。
【0045】
力及び変位測定工程158で、プロセッサーは、力の規模が工程156で用いられた接触閾値より大きい間に、規模の値及び力の方向を計算する。同時にプロセッサー42は位置センサー38からの信号を用いてプローブの遠位端部の場所を評価する。本明細書で測定期間と呼ぶ時間にかけてそれらの値が測定されるものと仮定する。プロセッサーは力の規模及び方向の値及び場所の値をメモリ50に保存する。
【0046】
評価工程160で、プロセッサーはメモリ50内に保存された値を分析する。
【0047】
場所の値の分析を基に、プロセッサーは、測定期間の遠位端部の最後の場所と最初の場所との差から遠位端部の全体的な変位ベクトルを決定する。
【数1】
変位ベクトルは
【数2】
方向及び規模を有し、本明細書では方向は局所x軸の方向を画定するものと仮定する(図3及び4に図示)。プロセッサーは、全体的な変位の規模|ΔD|もまた計算する。グラフ120及び140では変位の規模|ΔD|を使用する。
【0048】
力の測定値の分析を基に、プロセッサーは測定期間中の力の方向を決定する。典型的には、シースのないプローブでは力の方向は全体的な変位の方向と平行であり、すなわち、図3に示すように局所x軸に平行である。典型的には、シースのあるプローブでは力の方向はシースと平行であり、図4に示すように局所x軸に対して斜めである。
【0049】
測定期間に得られたそれぞれの力の測定値に対して、プロセッサーは方向として及び規模|F|として力ベクトル
【数3】
を計算する。プロセッサーは局所x軸に沿って力ベクトル
【数4】
を分解し、力の分解の規模|FX|を決定する(図3の真正面のケースでは分解された力と分解されない力は等しいが、図4の斜めのケースでは分解された力は分解されない力より小さい)。遠位端部の最後の場所及び最初の場所にそれぞれ対応する最後及び最初の分解された力の規模を基に、プロセッサーは、分解された力の規模|ΔFX|の全体的な変化の値を計算する。グラフ140は、分解された力の規模|ΔFX|の変化を図示する。グラフ120は真正面での状態|ΔF|≡|ΔFX|に関するものであるので、全体的な力の規模|ΔF|の変化を図示する。
【0050】
第2の比較工程162で、プロセッサーは以下の不等式の有効性を確認する。
【数5】
【0051】
Drange及びFrangeは、プロセッサー42が用いる|ΔD|及び|ΔFX|の既定の最小範囲であり、グラフ120及び140に図示されている。典型的には、Drangeの値は約4mmであり、Frangeの値は約8gである。プロセッサーは、不等式(3)を確認するために用いる値が小さすぎないことを確認するために不等式(1)及び(2)を用いる。小さすぎる値を用いると、例えば、ノイズによって、不等式(3)の確認に悪い影響が及ぶ場合がある。
【0052】
不等式(3)の有効性は、|ΔD|と|ΔFX|の関係が数学的に直線関係であり、したがって変位の規模が増加するにつれて分解された力の規模もまた増加することを決定する。この正比例の関係をグラフ120及び140に図示する。
【0053】
不等式(3)は患者の心臓の鼓動及び呼吸の間は典型的には無効であり、この場合、変位の規模が増加するにつれて分解された力の規模は減少するので、反比例の関係である。そのような反比例の関係をグラフ125に図示する。したがって、不等式(3)が有効であることは、テンティングが生じていること及び、力及び変位の変化が心臓の正常な挙動に典型的なものではないことの確認である。
【0054】
不等式(1)、(2)、(3)のいずれかが無効であれば、フローチャートは工程154に戻る。
【0055】
不等式(1)、(2)、(3)のすべてが有効であれば、プロセッサーは警告工程164に進む。
【0056】
警告工程164で、プロセッサーはテンティングが生じている可能性があると仮定し、例えば、テンティングが生じている可能性があるという通知をディスプレイ46に表示することによって、可視及び/又は可聴の警告を操作者30に対して発する。プロセッサーはまた、テント状になった組織の最初の場所116(図3及び図4)(テンティングが始まるポイント)、テント状になった組織の最後の場所118及び、形成されたテントの頂点を見つけるために、メモリ50に保存された結果を用いてテンティングのサイズも計算することができる。このサイズを警告に含めてもよい。いくつかの実施形態で、テンティングのサイズが既定値より大きい場合は、危険である可能性のある状態を反映するために警告を強めてもよい。危険なテンティングのサイズは、典型的には、テンティングになっている組織の厚さに依存する。組織の厚さは、例えば場所116の知識から知ること又は予測することができる。あるいは、又は加えて、
【数6】
においてQが正の値であり典型的には2g/mmより大きい場合は危険な状態であると仮定することができる。
【0057】
任意選択的マッピング工程166(フローチャートで破線により任意選択であることを示している)は、典型的には、プロセッサーがマッピングアルゴリズムを用いて心内膜の場所のマップを生成しているならば実施される。工程166で、プロセッサーはテント頂点の場所118を、工程164で計算されたテント状態の組織の最初の場所116と置換し、組織の場所としてこの値を用いる。置換された場所は、マッピングアルゴリズムを用いるマップの再計算に用いられる。
【0058】
フローチャート150はここで終わる。
【0059】
フローチャート150の工程の説明は、力センサーFが測定した力が患者の心拍及び/又は呼吸のために補正を一切受けなかったものと仮定している。本発明のいくつかの実施形態は、例えば、力センサーに対する典型的な力対時間の関係を決定するために多数の心拍及び呼吸周期にかけて「典型的な」心臓から力センサーに付加される力を測定又は推定することによって、そのような補正を適用することができる。プロセッサーは、テンティングが生じている可能性があるときに期待される典型的な力の測定値を見出すためにその関係を用いて、力センサーによって測定された実際の力からそれらの典型的な力の測定値を減算することができる。次いで、補正された力を上記の不等式(2)及び(3)に用いることができる。
【0060】
上述した実施形態は一例として記載されたものであり、本発明は、本明細書において上に具体的に図示及び説明した内容に限定されないことが明らかとなろう。その逆に、本発明の範囲は、上記に述べた異なる特性のすべてのものの組み合わせ及び一部のものの組み合わせを含み、更に上記の説明文を読むことで当業者によって想到されるであろう、先行技術には開示されていない変形例及び改変例をも含むものである。
【0061】
〔実施の態様〕
(1) 方法であって、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を含む、方法。
(2) 前記テンティングを検出することが、前記測定された力の変化である第1の規模と、前記測定された変位である第2の規模との間の数学的な直線関係(mathematically direct relationship)を前記関係が含むことを確認することを含む、実施態様1に記載の方法。
(3) 前記測定された変位によって画定された方向における前記測定された力の変化を測定することを含む、実施態様2に記載の方法。
(4) 前記力を測定することが、前記力の変化を測定することを含み、前記テンティングを検出することが、前記力の変化が既定の力の変化の範囲より大きいことを決定することを含む、実施態様1に記載の方法。
(5) 前記テンティングを検出することが、前記変位が既定の変位の範囲より大きいことを決定することを含む、実施態様1に記載の方法。
(6) 前記測定された変位に対応する前記テンティングのサイズを測定することを含む、実施態様1に記載の方法。
(7) 前記テンティングの検出に応答して前記プローブの操作者に警告を発することを含む、実施態様1に記載の方法。
(8) 前記テンティングの検出に応答して前記組織の座標のマップを調整することを含む、実施態様1に記載の方法。
(9) 前記組織の前記テンティングが、前記組織の円錐形成物を含み、前記マップを調整することが、前記円錐形成物の頂点の場所なしに前記マップを作成することを含む、実施態様8に記載の方法。
(10) 前記マップを作成することが、前記円錐形成物の基部の場所を決定すること及び前記基部の場所の座標を用いて前記マップを作成することを含む、実施態様8に記載の方法。
【0062】
(11) 前記患者の心拍及び呼吸の少なくとも1つに応答して、前記測定された力を補正することを含む、実施態様1に記載の方法。
(12) 装置であって、
プローブであって、
患者の組織に前記プローブが及ぼす力を測定するように構成された力センサーと、
前記力センサーが前記力を測定している間に前記プローブの変位を測定するように構成された位置トランスデューサーと、を含む、プローブと、
前記測定された力と前記測定された変位との関係に対応する前記組織のテンティングを検出するように構成されたプロセッサーと、を含む、装置。
(13) 前記テンティングを検出することが、前記測定された力の変化である第1の規模と、前記測定された変位である第2の規模との間の数学的な直線関係を前記関係が含むことを確認することを含む、実施態様12に記載の装置。
(14) 前記プロセッサが、前記測定された変位によって画定された方向における前記測定された力の変化を測定するように構成される、実施態様13に記載の装置。
(15) 前記力を測定することが前記力の変化を測定することを含み、前記テンティングを検出することが、前記力の変化が既定の力の変化の範囲より大きいことを決定することを含む、実施態様12に記載の装置。
(16) 前記テンティングを検出することが、前記変位が既定の変位の範囲より大きいことを決定することを含む、実施態様12に記載の装置。
(17) 前記プロセッサが、前記測定された変位に対応する前記テンティングのサイズを測定するように構成される、実施態様12に記載の装置。
(18) 前記プロセッサが、前記テンティングの検出に応答して前記組織の座標のマップを調整するように構成される、実施態様12に記載の装置。
(19) 前記組織の前記テンティングが、前記組織の円錐形成物を含み、前記マップを調整することが、前記円錐形成物の頂点の場所なしに前記マップを作成することを含む、実施態様18に記載の装置。
(20) 前記マップを作成することが、前記円錐形成物の基部の場所を決定すること及び前記基部の場所の座標を用いて前記マップを作成することを含む、実施態様18に記載の装置。
【0063】
(21) 前記プロセッサが、前記患者の心拍及び呼吸の少なくとも1つに応答して前記測定された力を補正するように構成される、実施態様12に記載の装置。
(22) コンピュータソフトウェア製品であって、内部に記録された非一時的なコンピュータプログラム指示を有する有形のコンピュータ読み取り可能な媒体を備え、前記指示がコンピュータによって読み取られると、前記コンピュータが、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を実行する、コンピュータソフトウェア製品。
【特許請求の範囲】
【請求項1】
装置であって、
プローブであって、
患者の組織に前記プローブが及ぼす力を測定するように構成された力センサーと、
前記力センサーが前記力を測定している間に前記プローブの変位を測定するように構成された位置トランスデューサーと、を含む、プローブと、
前記測定された力と前記測定された変位との関係に対応する前記組織のテンティングを検出するように構成されたプロセッサーと、を含む、装置。
【請求項2】
前記テンティングを検出することが、前記測定された力の変化である第1の規模と、前記測定された変位である第2の規模との間の数学的な直線関係を前記関係が含むことを確認することを含む、請求項1に記載の装置。
【請求項3】
前記プロセッサが、前記測定された変位によって画定された方向における前記測定された力の変化を測定するように構成される、請求項2に記載の装置。
【請求項4】
前記力を測定することが前記力の変化を測定することを含み、前記テンティングを検出することが、前記力の変化が既定の力の変化の範囲より大きいことを決定することを含む、請求項1に記載の装置。
【請求項5】
前記テンティングを検出することが、前記変位が既定の変位の範囲より大きいことを決定することを含む、請求項1に記載の装置。
【請求項6】
前記プロセッサが、前記測定された変位に対応する前記テンティングのサイズを測定するように構成される、請求項1に記載の装置。
【請求項7】
前記プロセッサが、前記テンティングの検出に応答して前記組織の座標のマップを調整するように構成される、請求項1に記載の装置。
【請求項8】
前記組織の前記テンティングが、前記組織の円錐形成物を含み、前記マップを調整することが、前記円錐形成物の頂点の場所なしに前記マップを作成することを含む、請求項7に記載の装置。
【請求項9】
前記マップを作成することが、前記円錐形成物の基部の場所を決定すること及び前記基部の場所の座標を用いて前記マップを作成することを含む、請求項7に記載の装置。
【請求項10】
前記プロセッサが、前記患者の心拍及び呼吸の少なくとも1つに応答して前記測定された力を補正するように構成される、請求項1に記載の装置。
【請求項11】
コンピュータソフトウェア製品であって、内部に記録された非一時的なコンピュータプログラム指示を有する有形のコンピュータ読み取り可能な媒体を備え、前記指示がコンピュータによって読み取られると、前記コンピュータが、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を実行する、コンピュータソフトウェア製品。
【請求項12】
方法であって、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を含む、方法。
【請求項1】
装置であって、
プローブであって、
患者の組織に前記プローブが及ぼす力を測定するように構成された力センサーと、
前記力センサーが前記力を測定している間に前記プローブの変位を測定するように構成された位置トランスデューサーと、を含む、プローブと、
前記測定された力と前記測定された変位との関係に対応する前記組織のテンティングを検出するように構成されたプロセッサーと、を含む、装置。
【請求項2】
前記テンティングを検出することが、前記測定された力の変化である第1の規模と、前記測定された変位である第2の規模との間の数学的な直線関係を前記関係が含むことを確認することを含む、請求項1に記載の装置。
【請求項3】
前記プロセッサが、前記測定された変位によって画定された方向における前記測定された力の変化を測定するように構成される、請求項2に記載の装置。
【請求項4】
前記力を測定することが前記力の変化を測定することを含み、前記テンティングを検出することが、前記力の変化が既定の力の変化の範囲より大きいことを決定することを含む、請求項1に記載の装置。
【請求項5】
前記テンティングを検出することが、前記変位が既定の変位の範囲より大きいことを決定することを含む、請求項1に記載の装置。
【請求項6】
前記プロセッサが、前記測定された変位に対応する前記テンティングのサイズを測定するように構成される、請求項1に記載の装置。
【請求項7】
前記プロセッサが、前記テンティングの検出に応答して前記組織の座標のマップを調整するように構成される、請求項1に記載の装置。
【請求項8】
前記組織の前記テンティングが、前記組織の円錐形成物を含み、前記マップを調整することが、前記円錐形成物の頂点の場所なしに前記マップを作成することを含む、請求項7に記載の装置。
【請求項9】
前記マップを作成することが、前記円錐形成物の基部の場所を決定すること及び前記基部の場所の座標を用いて前記マップを作成することを含む、請求項7に記載の装置。
【請求項10】
前記プロセッサが、前記患者の心拍及び呼吸の少なくとも1つに応答して前記測定された力を補正するように構成される、請求項1に記載の装置。
【請求項11】
コンピュータソフトウェア製品であって、内部に記録された非一時的なコンピュータプログラム指示を有する有形のコンピュータ読み取り可能な媒体を備え、前記指示がコンピュータによって読み取られると、前記コンピュータが、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を実行する、コンピュータソフトウェア製品。
【請求項12】
方法であって、
患者の組織にプローブが及ぼす力を測定することと、
前記力を測定する間に前記プローブの変位を測定することと、
前記測定された力と前記測定された変位との関係に応じた前記組織のテンティングを検出することと、を含む、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−254295(P2012−254295A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−125772(P2012−125772)
【出願日】平成24年6月1日(2012.6.1)
【出願人】(511099630)バイオセンス・ウエブスター・(イスラエル)・リミテッド (50)
【氏名又は名称原語表記】Biosense Webster (Israel), Ltd.
【住所又は居所原語表記】4 Hatnufa Street, Yokneam 20692, Israel
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2012−125772(P2012−125772)
【出願日】平成24年6月1日(2012.6.1)
【出願人】(511099630)バイオセンス・ウエブスター・(イスラエル)・リミテッド (50)
【氏名又は名称原語表記】Biosense Webster (Israel), Ltd.
【住所又は居所原語表記】4 Hatnufa Street, Yokneam 20692, Israel
[ Back to top ]