
テンプレートマッチングシステムおよびテンプレートマッチング方法
【課題】テンプレートマッチングにより取得したテンプレートに基づいて、部品が載置されている姿勢が安定的か、否かを判定し、不安定な場合は警告を生成する。
【解決手段】テンプレートマッチング部100は、取得したワーク130の設計データに基づいて形状を抽出し、複数の姿勢で平面に射影した複数の射影像を生成し、それぞれの姿勢に応じて形状の姿勢を仮想的に変化させ、形状の姿勢が復元する結果に基づいて、姿勢毎に載置された場合の安定度を算出し、射影像のそれぞれに応じて生成したテンプレートと安定度と対応付けて記憶し、撮影したワーク130の撮影画像に対応するテンプレートをマッチングにより選択し、選択したテンプレートに対応した安定度に基づいて、ワーク130が載置された姿勢について警告するか、否かを判定し、警告すると判定した場合、警告を示す警告信号を生成する。
【解決手段】テンプレートマッチング部100は、取得したワーク130の設計データに基づいて形状を抽出し、複数の姿勢で平面に射影した複数の射影像を生成し、それぞれの姿勢に応じて形状の姿勢を仮想的に変化させ、形状の姿勢が復元する結果に基づいて、姿勢毎に載置された場合の安定度を算出し、射影像のそれぞれに応じて生成したテンプレートと安定度と対応付けて記憶し、撮影したワーク130の撮影画像に対応するテンプレートをマッチングにより選択し、選択したテンプレートに対応した安定度に基づいて、ワーク130が載置された姿勢について警告するか、否かを判定し、警告すると判定した場合、警告を示す警告信号を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、テンプレートマッチングシステムおよびテンプレートマッチング方法に関する。
【背景技術】
【0002】
組み立て工程が自動化された生産ラインにおいて、構成する部品を正確に把持して組み立てるために、供給される部品の位置と共に、部品が載置されている姿勢を正確に知る必要がある。この場合、下記特許文献1に示すように、基準パターンとなる部品のテンプレートを、種々の姿勢に対応して作成し、供給される部品の画像と、種々のテンプレートとを比較して、その一致度を判別し、一致度が最も高いテンプレートを取得することで、この部品が載置されている姿勢に関する情報を取得した。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−158626号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、部品がベルト搬送装置等で搬送されて所定の位置まで運ばれる場合、ベルト搬送装置に載置される部品の姿勢は種々の様態が想定できる。例えば、部品同士が重なった状態でベルト搬送装置に載置される場合、個々の部品は不安定な姿勢であったり、その部品の中で脆弱な箇所が底面側になり破損の危険性があったりした。従って、部品が載置されている姿勢によっては、ベルト搬送装置を停止させ、部品の姿勢を修正したり、重なった部品を並べ直したりする必要があった。
しかしながら、上述の方法により取得したテンプレートは、部品が載置されている姿勢の安定度に関する情報を持たないため、テンプレートから部品が載置されている姿勢は取得できるが、その姿勢が安定的な姿勢なのか、または不安定な姿勢なのかを知ることができなかった。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]
本適用例にかかるテンプレートマッチングシステムは、目標物の設計データを取得する取得手段と、取得した前記設計データに基づいて前記目標物の形状を抽出する抽出手段と、抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する射影手段と、前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する算出手段と、前記複数の射影像のそれぞれに応じたテンプレートを生成するテンプレート生成手段と、生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する記憶手段と、載置された前記目標物を撮影して撮影画像を出力する撮影手段と、前記記憶手段に記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択するマッチング手段と、選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する警告判定手段と、前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する警告信号生成手段と、を備えることを特徴とする。
【0007】
このような構成によれば、目標物の設計データに基づいて形状が抽出され、抽出された形状を複数の姿勢で射影された複数の射影像が生成され、それぞれの姿勢に応じて形状が仮想的に変化され、その形状の姿勢が復元する結果により、複数の姿勢毎に目標物が平面に載置された場合の安定度が算出されると共に、複数の射影像のそれぞれに応じたテンプレートが生成され、生成されたテンプレートは安定度と共に記憶される。更に、載置された目標物が撮影された撮影画像は、記憶されたテンプレートと比較されて一致度が判定されることにより、対応するテンプレートが選択され、選択されたテンプレートに応じた安定度に基づいて、目標物が載置された姿勢に関して警告するか、否かが判定され、警告すると判定された場合、警告信号が生成される。従って、安定度の情報を有するテンプレートを用いてテンプレートマッチングを行うため、目標物の姿勢に対応するテンプレートが選択されると共に、目標物の姿勢の安定度に応じて警告信号を生成することができる。
【0008】
[適用例2]
上記適用例にかかるテンプレートマッチングシステムにおいて、前記算出手段は、前記形状を前記複数の姿勢のそれぞれにおいて前記平面に近接させた場合、前記平面と最初に接触する前記形状の接触点を算出する接触点算出手段と、前記複数の姿勢のそれぞれにおいて算出した前記接触点を支点として、前記平面に載置された前記形状の姿勢を仮想的に微小に変化させた後、前記形状の姿勢が元に戻るか、否かにより、前記目標物が前記複数の姿勢毎に載置された場合の安定度を判定する安定性判定手段と、を備えることが好ましい。
【0009】
このような構成によれば、目標物のそれぞれの姿勢における安定度を力学的に算出できる。
【0010】
[適用例3]
上記適用例にかかるテンプレートマッチングシステムにおいて、前記警告判定手段は、前記テンプレートに応じた前記安定度に加え、前記目標物に関する情報に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定することが好ましい。
【0011】
このような構成によれば、姿勢の安定度に加えて、目標物に関する情報に応じて警告信号を生成できる。
【0012】
[適用例4]
上記適用例にかかるテンプレートマッチングシステムにおいて、前記警告信号は、表示手段に対して警告を示す情報を表示することが好ましい。
【0013】
このような構成によれば、目標物の載置された姿勢に関して、表示手段で警告を通知できる。
【0014】
[適用例5]
上記適用例にかかるテンプレートマッチングシステムは、前記目標物が載置された姿勢について警告しないと判定した場合、前記目標物を把持可能な姿勢変更手段に対して前記目標物の姿勢の変更を指示する姿勢変更指示手段を更に備えても良い。
【0015】
[適用例6]
本適用例にかかるテンプレートマッチング方法は、目標物の設計データを取得する工程と、取得した前記設計データに基づいて前記目標物の形状を抽出する工程と、抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する工程と、前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する工程と、前記複数の射影像のそれぞれに応じたテンプレートを生成する工程と、生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する工程と、載置された前記目標物を撮影して撮影画像を出力する工程と、記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択する工程と、選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する工程と、前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する工程と、を備えることを特徴とする。
【0016】
このような方法によれば、目標物の設計データに基づいて形状が抽出され、抽出された形状を複数の姿勢で射影された複数の射影像が生成され、それぞれの姿勢に応じて形状が仮想的に変化され、その形状の姿勢が復元する結果により、複数の姿勢毎に目標物が平面に載置された場合の安定度が算出されると共に、複数の射影像のそれぞれに応じたテンプレートが生成され、生成されたテンプレートは安定度と共に記憶される。更に、載置された目標物が撮影された撮影画像は、記憶されたテンプレートと比較されて一致度が判定されることにより、対応するテンプレートが選択され、選択されたテンプレートに応じた安定度に基づいて、目標物が載置された姿勢に関して警告するか、否かが判定され、警告すると判定された場合、警告信号が生成される。従って、安定度の情報を有するテンプレートを用いてテンプレートマッチングを行うため、目標物の姿勢に対応するテンプレートが選択されると共に、目標物の姿勢の安定度に応じて警告信号を生成することができる。
【図面の簡単な説明】
【0017】
【図1】本実施形態に係るワーク姿勢変更装置の概観を示す図。
【図2】本実施形態に係るワーク姿勢変更装置の機能構成を示す図。
【図3】ワークの安定度算出を説明する図。
【図4】本実施形態に係るワーク姿勢変更装置による処理の流れを示すフローチャート。
【発明を実施するための形態】
【0018】
以下、テンプレート生成システム装置を適用したワーク姿勢変更装置について図面を参照して説明する。
【0019】
(実施形態)
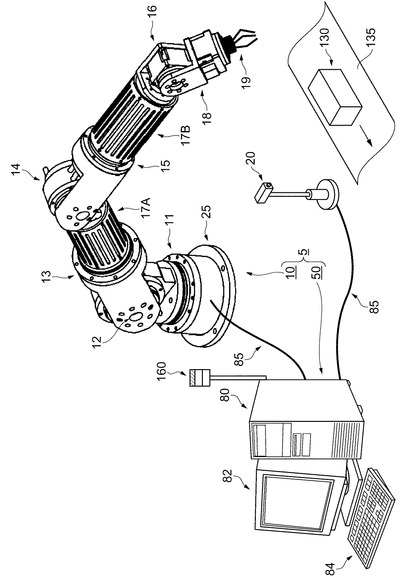
図1は、ワーク姿勢変更装置5の概観を示す図である。このワーク姿勢変更装置5は、ロボット10と、ワーク姿勢を変更すべくロボット10を制御する制御装置50を備え、ベルト搬送装置135により一定方向に搬送される目標物であるワーク130の載置姿勢をパターンマッチングにより検出し、必要に応じて、ロボット10がワーク130を把持して、ワーク130を所定の姿勢に変更し、床面に載置する機能を有する。
ロボット10は、目標物の姿勢を変更する姿勢変更手段であり、設置面に設置される基体であるロボットベース25、設置面との鉛直軸で回転する第一軸11、アーム17Aを水平軸で回転する第二軸12、アーム17Aの軸方向に回転する第三軸13、アーム17Aに固定され、アーム17Bを水平方向に回転する第四軸14、アーム17Bの軸方向に回転する第五軸15、および、アーム17Bに固定され、手首18を水平方向に回転する第六軸16のそれぞれを移動部とする六軸制御の多関節産業用ロボットである。この手首18の先端にはハンド19が装着される。このハンド19は、供給される部品を掴み、所定の姿勢に変更して所定の位置に搬送し、組み立て作業等を行うことができる。
【0020】
これらの駆動軸は、何れも図示を略したモーターや空圧機器等により動作する複数のアクチュエーター30(図2)の駆動により回動するように構成され、複数のアクチュエーター30は、制御装置50からケーブル85を介して送られる制御信号に基づいて駆動するように構成されている。
尚、本実施形態では、部品の位置や姿勢を変更して組み立てる手段として六軸制御の多関節産業用ロボットを採用したが、これに限定されるものではなく、スカラー型のロボットであっても良く、また、それぞれ一方向に駆動する駆動手段を多段に組み合わせた専用機、例えば、ピックアンドプレースユニットであっても良い。
【0021】
制御装置50は、コンピューター80、ディスプレイ82、キーボード84、デジタルカメラ20および表示灯160を備える。コンピューター80は、それぞれ図示を略したCPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)、HDD(Hard Disk Drive)、シーケンサー、ロボットコントローラーおよびドライブユニット等からなるハードウェア資源と、ROMやHDD等に記憶された種々のソフトウェアとが有機的に協働することにより、後述する各機能部の機能を実現している。
また、撮影手段であるデジタルカメラ20は、ワーク130を撮影可能な位置に設置され、図示を略したCCD(Charge Coupled Device)のような撮像素子によりワーク130に適した撮影条件で撮影し、撮影した画像信号はケーブル85を介してコンピューター80に送るように構成されている。尚、本実施形態では、デジタルカメラ20はロボット10と別々に設置されているが、ロボット10の手首18に設置された様態であっても良い。また、デジタルカメラ20の視点は、制御装置50からの指示に応じて、自在に変更できるように構成されても良い。また、表示灯160は、赤色、黄色および緑色のランプがコンピューター80の指示に応じて点灯する。尚、表示灯160は、このような様態には限定されず、赤色等の回転灯であっても良い。
【0022】
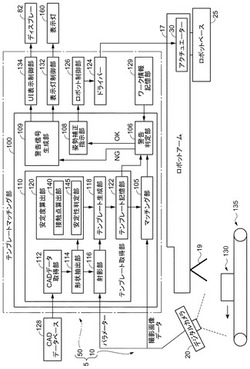
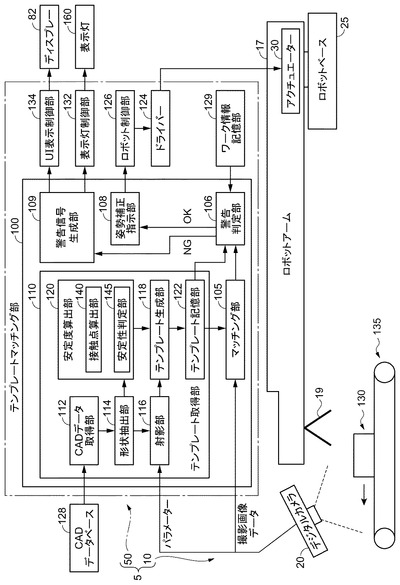
図2は、ワーク姿勢変更装置5の機能構成を示す図である。制御装置50は、テンプレートマッチング部100、ロボット制御部126、ドライバー124、ワーク情報記憶部129、表示灯制御部132およびUI表示制御部134を備える。また、テンプレートマッチング部100は、テンプレート取得部110、マッチング部105、警告判定部106、姿勢補正指示部108および警告信号生成部109を備えるテンプレートマッチングシステムである。
テンプレート取得部110は、ワーク130のCAD(Computer Aided Design)データに基づいて、このワーク130を2次元的に射影した場合に、取り得る可能性が有る全てのテンプレートを取得する。このテンプレート取得部110は、CADデータ取得部112、形状抽出部114、射影部116、テンプレート生成部118、安定度算出部120およびテンプレート記憶部122を備える。
CADデータ取得部112は、CADデータベース128からワーク130の設計データ(CADデータ)を取得する取得手段である。尚、CADデータベース128は、制御装置50のコンピューター80に保持されても良く、また、外部のサーバーに保持され、通信を介して取得されても良い。CADデータ取得部112により取得されたCADデータは、形状抽出部114に送られる。
【0023】
形状抽出部114は、CADデータ取得部112から送られるCADデータを解析し、ワーク130に関する3次元形状のCADモデル150(図3)を抽出する抽出手段である。本実施形態では、CADデータは、IGES(Initial Graphics Exchange Specification)やVRML(Virtual Reality Modeling Language)等でワーク130が記述されているデータを想定する。また、CADデータの解析に限定されず、CADデータを操作するアプリケーションを介して3次元形状を抽出しても良い。形状抽出部114で抽出されたCADモデル150に関する情報は、安定度算出部120および射影部116に送られる。
安定度算出部120は、接触点算出部140と安定性判定部145を備え、算出手段としてワーク130が載置された姿勢毎の安定度を算出する。この安定度算出部120の機能の詳細については、図3を参照して説明する。
【0024】
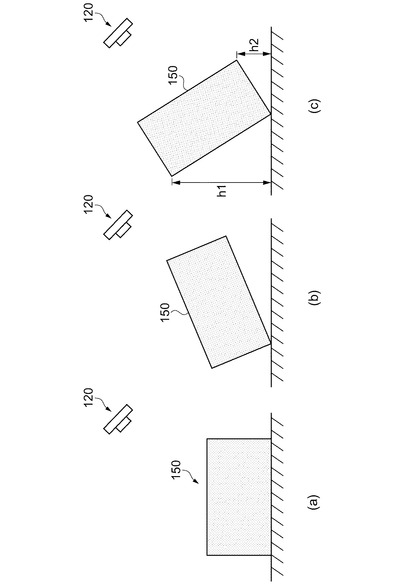
接触点算出部140は、CADモデル150を用いて、ワーク130が取り得る全ての姿勢を想定し、床面と接触する場合の接触点を算出する接触点算出手段である。具体的には、形状抽出部114が抽出したCADモデル150を3次元の種々な方向に回転させる。この際、回転するCADモデル150を平面である床面に並進させて近づけ、接触点を算出する。ここで、ワーク130の表面形状が平面のみで構成されている場合や、ワーク130のCADモデル150がVRMLで記述され、三角ポリゴンによる近似で表現されている場合は、図3(c)に示すように、CADモデル150の各頂点と平面との距離(h1,h2)を計算すれば良いため、接触点の算出を簡便に行うことができる。
安定性判定部145は、図3(b)や(c)に示すように、それぞれ算出した接触点を支点として、ワーク130のCADモデル150を仮想的に微小な角度だけずらして微小変化を与え、元の状態に復元するか、否かを接触点毎に判定する安定性判定手段である。詳細には、支点を通る軸(図示は略す。)を設定し、この軸を中心として重力によるモーメントを計算し、元の位置に戻るか、否かを判定する。また、CADモデル150に微小な変化を与えた場合のモーメントの大きさの変化を取得し、この変化の安定度に基づいて判定しても良い。安定度算出部120は、支点毎、即ち、ワーク130が載置される姿勢毎の安定度を保持する。ワーク130の姿勢毎の安定度に関する情報は、テンプレート生成部118が生成したテンプレートを記憶する際に参照される。
【0025】
射影部116は、予め取得されるデジタルカメラ20の内部パラメーターや、撮影方向等を示す外部パラメーターに基づいて、撮影画像を射影する射影手段である。即ち、外部パラメーターに基づき、CADモデル150から算出できるワーク130の種々な姿勢の3次元形状を、画像を拡大または縮小または回転する公知の変換方法であるアフィン変換等により、デジタルカメラ20のカメラ座標系に投射する。また、内部パラメーターに基づき、デジタルカメラ20の画像平面に射影する。また、ワーク130の姿勢が決定した場合、デジタルカメラ20の画像平面に射影する。ここで射影した射影像は、テンプレート生成部118に送られる。
テンプレート生成部118は、射影部116から送られる射影像からテンプレートを生成し、生成したテンプレートの情報をテンプレート記憶部122に記憶する生成手段である。このテンプレート生成部118は、生成したテンプレートに対応した安定度に関する情報を安定度算出部120から読み取って関連付けされ、テンプレート記憶部122に送られる。テンプレート記憶部122は記憶手段であり、テンプレート生成部118が生成したテンプレートと、このテンプレートに関連付けされた安定度に関する情報とを対応付けて記憶する。
【0026】
マッチング部105は、デジタルカメラ20が撮影したワーク130の撮影画像と、テンプレート記憶部122に記憶されている画像平面に射影されたテンプレートとのマッチングを行うマッチング手段である。この場合、撮影画像を平行に投射したテンプレートとマッチングしても良い。マッチング手法は、限定されず、撮影画像からエッジ画像を生成し、形状を合わせた後、予め設定した閾値を越えて合致すれば、姿勢を検出したと判定しても良い。また、テンプレートは、画像平面に射影したものが好ましいが、撮影したワーク130の世界座標系での姿勢が求めることができる場合は、撮影画像を世界座標系に変換してマッチングしても良い。尚、マッチング部105が検出した姿勢の情報は、警告判定部106に送られる。
【0027】
警告判定部106は、マッチング部105が検出した姿勢の情報から、マッチングしたテンプレートの安定度に関する情報をテンプレート記憶部122から取得し、更に、このワーク130に関する情報をワーク情報記憶部129から取得し、これらの情報に基づいて、ユーザーに警告を発するか、否かを判定する警告判定手段である。例えば、マッチング部105が検出したワーク130の姿勢が不安定である場合や、ワーク情報記憶部129に記憶された情報に基づきワーク130が保持されようとする領域が、ワーク130の保持禁止部分である場合、警告判定部106はユーザーへの警告の発信を判定する。
尚、ワーク130の保持禁止部分とは、例えば、ワーク130の内部や表面付近に電子回路や精密部品が実装され、ロボット10のハンド19が把持することで破壊されたり、精度が悪化したりする可能性が高い領域である。警告判定部106がユーザーへの警告の発信を判定した場合、警告信号生成部109に対して警告信号の生成を指示する。他方で、警告判定部106がユーザーへの警告の発信が不要であると判定した場合、姿勢補正指示部108に対してワーク130の姿勢補正を指示する。
【0028】
警告信号生成部109は、警告判定部106からの指示に応じて、ワーク130の姿勢が不良である旨の警告を表示手段に表示させ、ユーザーに通知する警告信号生成手段である。具体的には、警告信号生成部109は、UI(UserInterface)表示制御部134と表示灯制御部132に対して表示を指示する警告信号を生成する。この結果、UI表示制御部134は、警告を示すメッセージボックス(図示は略す)等をディスプレイ82上に表示させると共に、表示灯制御部132はランプを点灯させる。この結果、ユーザーはこれらの警告を視認し、ベルト搬送装置135を一時休止して、ワーク130姿勢の補正や、姿勢不良のワーク130の除外を行った後、ベルト搬送装置135の休止を解除する。尚、ユーザーへの警告は、上記した手段には限定されず、ユーザーに対して視聴覚的に警告する方法、例えば、音声等による警告を併用しても良い。
【0029】
姿勢補正指示部108は、警告判定部106からの指示に応じて、検出した姿勢に関する情報に基づき、ワーク130を所定の姿勢に変更すべく、ロボット10の駆動をロボット制御部126に指示する姿勢変更指示手段である。
ロボット制御部126とドライバー124は、アーム17等の稼動部の動作を制御する制御手段である。ロボット制御部126は、ワーク130の姿勢の変更指示に基づき、ロボット10を移動させるための複数のアクチュエーター30の駆動量を算出し、算出した駆動量に関する駆動情報をドライバー124に送る。ドライバー124は、ロボット制御部126から送られる駆動情報に基づいて、それぞれのアクチュエーター30毎に駆動信号を生成し、それぞれのアクチュエーター30に送る。この結果、アーム17が所定の位置まで移動し、ハンド19がワーク130を把持してワーク130を回転させたり、反転させたりして、ワーク130の姿勢を変更する。
【0030】
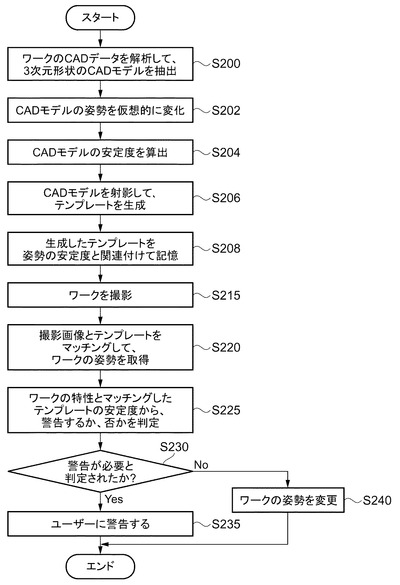
図4は、ワーク姿勢変更装置5によりロボット10がワーク130を把持して姿勢を変更する処理の流れを示すフローチャートである。この処理が実行されると、最初に、制御装置50は、取得したワーク130のCADデータを解析して、ワーク130の3次元形状のCADモデル150を抽出する(ステップS200)。
次に、制御装置50は、CADモデル150の姿勢を仮想的に変化させる(ステップS202)。次に、制御装置50は、変化させた姿勢毎の安定度を算出する(ステップS204)。
次に、制御装置50は、CADモデル150を射影して、テンプレートを生成する(ステップS206)。続いて、制御装置50は、生成したテンプレートを姿勢の安定度と関連付けて記憶する(ステップS208)。
次に、制御装置50は、ワーク130を撮影して撮影画像を取得する(ステップS215)。
【0031】
次に、制御装置50は、撮影画像と記憶されたテンプレートとをマッチングしてワーク130の姿勢を取得する(ステップS220)。
次に、制御装置50は、ワーク130の特性と取得した姿勢の安定度から、ユーザーに対して警告するか、否を判定する(ステップS225)。
ここで、制御装置50は、判定結果に応じた処理を指示する(ステップS230)。即ち、ユーザーに対して警告すると判定した場合(ステップS230でYes)、制御装置50は、ユーザーが注視すべくメッセージや光で警告し(ステップS235)、一連の処理を終了する。他方で、ユーザーに対して警告が不要であると判定した場合(ステップS230でNo)、制御装置50は、ロボット10にワーク130の姿勢の変更を指示し(ステップS240)、一連の処理を終了する。
上述した処理により、供給されるワーク130の取り得る姿勢の中から、それぞれの安定度を求め、ワーク130の撮影画像とのパターンマッチングを行ってワーク130が置かれた姿勢を認識し、その姿勢の安定度やワーク130の特性から、ワーク130の姿勢をロボット10に変更させるか、もしくは、ユーザーに対してワーク130の姿勢不良を警告するかが判定される。従って、例えば、ベルト搬送装置135上で他のワーク130と重なって不安定に載置されたワーク130を認識し、ユーザーに対して警告を通知するため、ユーザーは不安定な状態のワーク130をベルト搬送装置135上から除去したり、姿勢を矯正したりできるため、ロボット10のハンド19がワーク130の想定外の部分を把持することにより、ワーク130の外観が破壊されたり、ワーク130が有する機能が壊されたりすることを回避できる。
【符号の説明】
【0032】
5…ワーク姿勢変更装置、10…ロボット、11…第一軸、12…第二軸、13…第三軸、14…第四軸、15…第五軸、16…第六軸、17,17A,17B…アーム、18…手首、19…ハンド、20…デジタルカメラ、25…ロボットベース、30…アクチュエーター、50…制御装置、80…コンピューター、82…ディスプレイ、84…キーボード、85…ケーブル、100…テンプレートマッチング部、105…マッチング部、106…警告判定部、108…姿勢補正指示部、109…警告信号生成部、110…テンプレート取得部、112…CADデータ取得部、114…形状抽出部、116…射影部、118…テンプレート生成部、120…安定度算出部、122…テンプレート記憶部、124…ドライバー、126…ロボット制御部、128…CADデータベース、129…ワーク情報記憶部、130…ワーク、132…表示灯制御部、134…UI表示制御部、135…ベルト搬送装置、140…接触点算出部、145…安定性判定部、150…CADモデル、160…表示灯。
【技術分野】
【0001】
本発明は、テンプレートマッチングシステムおよびテンプレートマッチング方法に関する。
【背景技術】
【0002】
組み立て工程が自動化された生産ラインにおいて、構成する部品を正確に把持して組み立てるために、供給される部品の位置と共に、部品が載置されている姿勢を正確に知る必要がある。この場合、下記特許文献1に示すように、基準パターンとなる部品のテンプレートを、種々の姿勢に対応して作成し、供給される部品の画像と、種々のテンプレートとを比較して、その一致度を判別し、一致度が最も高いテンプレートを取得することで、この部品が載置されている姿勢に関する情報を取得した。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−158626号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、部品がベルト搬送装置等で搬送されて所定の位置まで運ばれる場合、ベルト搬送装置に載置される部品の姿勢は種々の様態が想定できる。例えば、部品同士が重なった状態でベルト搬送装置に載置される場合、個々の部品は不安定な姿勢であったり、その部品の中で脆弱な箇所が底面側になり破損の危険性があったりした。従って、部品が載置されている姿勢によっては、ベルト搬送装置を停止させ、部品の姿勢を修正したり、重なった部品を並べ直したりする必要があった。
しかしながら、上述の方法により取得したテンプレートは、部品が載置されている姿勢の安定度に関する情報を持たないため、テンプレートから部品が載置されている姿勢は取得できるが、その姿勢が安定的な姿勢なのか、または不安定な姿勢なのかを知ることができなかった。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]
本適用例にかかるテンプレートマッチングシステムは、目標物の設計データを取得する取得手段と、取得した前記設計データに基づいて前記目標物の形状を抽出する抽出手段と、抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する射影手段と、前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する算出手段と、前記複数の射影像のそれぞれに応じたテンプレートを生成するテンプレート生成手段と、生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する記憶手段と、載置された前記目標物を撮影して撮影画像を出力する撮影手段と、前記記憶手段に記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択するマッチング手段と、選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する警告判定手段と、前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する警告信号生成手段と、を備えることを特徴とする。
【0007】
このような構成によれば、目標物の設計データに基づいて形状が抽出され、抽出された形状を複数の姿勢で射影された複数の射影像が生成され、それぞれの姿勢に応じて形状が仮想的に変化され、その形状の姿勢が復元する結果により、複数の姿勢毎に目標物が平面に載置された場合の安定度が算出されると共に、複数の射影像のそれぞれに応じたテンプレートが生成され、生成されたテンプレートは安定度と共に記憶される。更に、載置された目標物が撮影された撮影画像は、記憶されたテンプレートと比較されて一致度が判定されることにより、対応するテンプレートが選択され、選択されたテンプレートに応じた安定度に基づいて、目標物が載置された姿勢に関して警告するか、否かが判定され、警告すると判定された場合、警告信号が生成される。従って、安定度の情報を有するテンプレートを用いてテンプレートマッチングを行うため、目標物の姿勢に対応するテンプレートが選択されると共に、目標物の姿勢の安定度に応じて警告信号を生成することができる。
【0008】
[適用例2]
上記適用例にかかるテンプレートマッチングシステムにおいて、前記算出手段は、前記形状を前記複数の姿勢のそれぞれにおいて前記平面に近接させた場合、前記平面と最初に接触する前記形状の接触点を算出する接触点算出手段と、前記複数の姿勢のそれぞれにおいて算出した前記接触点を支点として、前記平面に載置された前記形状の姿勢を仮想的に微小に変化させた後、前記形状の姿勢が元に戻るか、否かにより、前記目標物が前記複数の姿勢毎に載置された場合の安定度を判定する安定性判定手段と、を備えることが好ましい。
【0009】
このような構成によれば、目標物のそれぞれの姿勢における安定度を力学的に算出できる。
【0010】
[適用例3]
上記適用例にかかるテンプレートマッチングシステムにおいて、前記警告判定手段は、前記テンプレートに応じた前記安定度に加え、前記目標物に関する情報に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定することが好ましい。
【0011】
このような構成によれば、姿勢の安定度に加えて、目標物に関する情報に応じて警告信号を生成できる。
【0012】
[適用例4]
上記適用例にかかるテンプレートマッチングシステムにおいて、前記警告信号は、表示手段に対して警告を示す情報を表示することが好ましい。
【0013】
このような構成によれば、目標物の載置された姿勢に関して、表示手段で警告を通知できる。
【0014】
[適用例5]
上記適用例にかかるテンプレートマッチングシステムは、前記目標物が載置された姿勢について警告しないと判定した場合、前記目標物を把持可能な姿勢変更手段に対して前記目標物の姿勢の変更を指示する姿勢変更指示手段を更に備えても良い。
【0015】
[適用例6]
本適用例にかかるテンプレートマッチング方法は、目標物の設計データを取得する工程と、取得した前記設計データに基づいて前記目標物の形状を抽出する工程と、抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する工程と、前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する工程と、前記複数の射影像のそれぞれに応じたテンプレートを生成する工程と、生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する工程と、載置された前記目標物を撮影して撮影画像を出力する工程と、記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択する工程と、選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する工程と、前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する工程と、を備えることを特徴とする。
【0016】
このような方法によれば、目標物の設計データに基づいて形状が抽出され、抽出された形状を複数の姿勢で射影された複数の射影像が生成され、それぞれの姿勢に応じて形状が仮想的に変化され、その形状の姿勢が復元する結果により、複数の姿勢毎に目標物が平面に載置された場合の安定度が算出されると共に、複数の射影像のそれぞれに応じたテンプレートが生成され、生成されたテンプレートは安定度と共に記憶される。更に、載置された目標物が撮影された撮影画像は、記憶されたテンプレートと比較されて一致度が判定されることにより、対応するテンプレートが選択され、選択されたテンプレートに応じた安定度に基づいて、目標物が載置された姿勢に関して警告するか、否かが判定され、警告すると判定された場合、警告信号が生成される。従って、安定度の情報を有するテンプレートを用いてテンプレートマッチングを行うため、目標物の姿勢に対応するテンプレートが選択されると共に、目標物の姿勢の安定度に応じて警告信号を生成することができる。
【図面の簡単な説明】
【0017】
【図1】本実施形態に係るワーク姿勢変更装置の概観を示す図。
【図2】本実施形態に係るワーク姿勢変更装置の機能構成を示す図。
【図3】ワークの安定度算出を説明する図。
【図4】本実施形態に係るワーク姿勢変更装置による処理の流れを示すフローチャート。
【発明を実施するための形態】
【0018】
以下、テンプレート生成システム装置を適用したワーク姿勢変更装置について図面を参照して説明する。
【0019】
(実施形態)
図1は、ワーク姿勢変更装置5の概観を示す図である。このワーク姿勢変更装置5は、ロボット10と、ワーク姿勢を変更すべくロボット10を制御する制御装置50を備え、ベルト搬送装置135により一定方向に搬送される目標物であるワーク130の載置姿勢をパターンマッチングにより検出し、必要に応じて、ロボット10がワーク130を把持して、ワーク130を所定の姿勢に変更し、床面に載置する機能を有する。
ロボット10は、目標物の姿勢を変更する姿勢変更手段であり、設置面に設置される基体であるロボットベース25、設置面との鉛直軸で回転する第一軸11、アーム17Aを水平軸で回転する第二軸12、アーム17Aの軸方向に回転する第三軸13、アーム17Aに固定され、アーム17Bを水平方向に回転する第四軸14、アーム17Bの軸方向に回転する第五軸15、および、アーム17Bに固定され、手首18を水平方向に回転する第六軸16のそれぞれを移動部とする六軸制御の多関節産業用ロボットである。この手首18の先端にはハンド19が装着される。このハンド19は、供給される部品を掴み、所定の姿勢に変更して所定の位置に搬送し、組み立て作業等を行うことができる。
【0020】
これらの駆動軸は、何れも図示を略したモーターや空圧機器等により動作する複数のアクチュエーター30(図2)の駆動により回動するように構成され、複数のアクチュエーター30は、制御装置50からケーブル85を介して送られる制御信号に基づいて駆動するように構成されている。
尚、本実施形態では、部品の位置や姿勢を変更して組み立てる手段として六軸制御の多関節産業用ロボットを採用したが、これに限定されるものではなく、スカラー型のロボットであっても良く、また、それぞれ一方向に駆動する駆動手段を多段に組み合わせた専用機、例えば、ピックアンドプレースユニットであっても良い。
【0021】
制御装置50は、コンピューター80、ディスプレイ82、キーボード84、デジタルカメラ20および表示灯160を備える。コンピューター80は、それぞれ図示を略したCPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)、HDD(Hard Disk Drive)、シーケンサー、ロボットコントローラーおよびドライブユニット等からなるハードウェア資源と、ROMやHDD等に記憶された種々のソフトウェアとが有機的に協働することにより、後述する各機能部の機能を実現している。
また、撮影手段であるデジタルカメラ20は、ワーク130を撮影可能な位置に設置され、図示を略したCCD(Charge Coupled Device)のような撮像素子によりワーク130に適した撮影条件で撮影し、撮影した画像信号はケーブル85を介してコンピューター80に送るように構成されている。尚、本実施形態では、デジタルカメラ20はロボット10と別々に設置されているが、ロボット10の手首18に設置された様態であっても良い。また、デジタルカメラ20の視点は、制御装置50からの指示に応じて、自在に変更できるように構成されても良い。また、表示灯160は、赤色、黄色および緑色のランプがコンピューター80の指示に応じて点灯する。尚、表示灯160は、このような様態には限定されず、赤色等の回転灯であっても良い。
【0022】
図2は、ワーク姿勢変更装置5の機能構成を示す図である。制御装置50は、テンプレートマッチング部100、ロボット制御部126、ドライバー124、ワーク情報記憶部129、表示灯制御部132およびUI表示制御部134を備える。また、テンプレートマッチング部100は、テンプレート取得部110、マッチング部105、警告判定部106、姿勢補正指示部108および警告信号生成部109を備えるテンプレートマッチングシステムである。
テンプレート取得部110は、ワーク130のCAD(Computer Aided Design)データに基づいて、このワーク130を2次元的に射影した場合に、取り得る可能性が有る全てのテンプレートを取得する。このテンプレート取得部110は、CADデータ取得部112、形状抽出部114、射影部116、テンプレート生成部118、安定度算出部120およびテンプレート記憶部122を備える。
CADデータ取得部112は、CADデータベース128からワーク130の設計データ(CADデータ)を取得する取得手段である。尚、CADデータベース128は、制御装置50のコンピューター80に保持されても良く、また、外部のサーバーに保持され、通信を介して取得されても良い。CADデータ取得部112により取得されたCADデータは、形状抽出部114に送られる。
【0023】
形状抽出部114は、CADデータ取得部112から送られるCADデータを解析し、ワーク130に関する3次元形状のCADモデル150(図3)を抽出する抽出手段である。本実施形態では、CADデータは、IGES(Initial Graphics Exchange Specification)やVRML(Virtual Reality Modeling Language)等でワーク130が記述されているデータを想定する。また、CADデータの解析に限定されず、CADデータを操作するアプリケーションを介して3次元形状を抽出しても良い。形状抽出部114で抽出されたCADモデル150に関する情報は、安定度算出部120および射影部116に送られる。
安定度算出部120は、接触点算出部140と安定性判定部145を備え、算出手段としてワーク130が載置された姿勢毎の安定度を算出する。この安定度算出部120の機能の詳細については、図3を参照して説明する。
【0024】
接触点算出部140は、CADモデル150を用いて、ワーク130が取り得る全ての姿勢を想定し、床面と接触する場合の接触点を算出する接触点算出手段である。具体的には、形状抽出部114が抽出したCADモデル150を3次元の種々な方向に回転させる。この際、回転するCADモデル150を平面である床面に並進させて近づけ、接触点を算出する。ここで、ワーク130の表面形状が平面のみで構成されている場合や、ワーク130のCADモデル150がVRMLで記述され、三角ポリゴンによる近似で表現されている場合は、図3(c)に示すように、CADモデル150の各頂点と平面との距離(h1,h2)を計算すれば良いため、接触点の算出を簡便に行うことができる。
安定性判定部145は、図3(b)や(c)に示すように、それぞれ算出した接触点を支点として、ワーク130のCADモデル150を仮想的に微小な角度だけずらして微小変化を与え、元の状態に復元するか、否かを接触点毎に判定する安定性判定手段である。詳細には、支点を通る軸(図示は略す。)を設定し、この軸を中心として重力によるモーメントを計算し、元の位置に戻るか、否かを判定する。また、CADモデル150に微小な変化を与えた場合のモーメントの大きさの変化を取得し、この変化の安定度に基づいて判定しても良い。安定度算出部120は、支点毎、即ち、ワーク130が載置される姿勢毎の安定度を保持する。ワーク130の姿勢毎の安定度に関する情報は、テンプレート生成部118が生成したテンプレートを記憶する際に参照される。
【0025】
射影部116は、予め取得されるデジタルカメラ20の内部パラメーターや、撮影方向等を示す外部パラメーターに基づいて、撮影画像を射影する射影手段である。即ち、外部パラメーターに基づき、CADモデル150から算出できるワーク130の種々な姿勢の3次元形状を、画像を拡大または縮小または回転する公知の変換方法であるアフィン変換等により、デジタルカメラ20のカメラ座標系に投射する。また、内部パラメーターに基づき、デジタルカメラ20の画像平面に射影する。また、ワーク130の姿勢が決定した場合、デジタルカメラ20の画像平面に射影する。ここで射影した射影像は、テンプレート生成部118に送られる。
テンプレート生成部118は、射影部116から送られる射影像からテンプレートを生成し、生成したテンプレートの情報をテンプレート記憶部122に記憶する生成手段である。このテンプレート生成部118は、生成したテンプレートに対応した安定度に関する情報を安定度算出部120から読み取って関連付けされ、テンプレート記憶部122に送られる。テンプレート記憶部122は記憶手段であり、テンプレート生成部118が生成したテンプレートと、このテンプレートに関連付けされた安定度に関する情報とを対応付けて記憶する。
【0026】
マッチング部105は、デジタルカメラ20が撮影したワーク130の撮影画像と、テンプレート記憶部122に記憶されている画像平面に射影されたテンプレートとのマッチングを行うマッチング手段である。この場合、撮影画像を平行に投射したテンプレートとマッチングしても良い。マッチング手法は、限定されず、撮影画像からエッジ画像を生成し、形状を合わせた後、予め設定した閾値を越えて合致すれば、姿勢を検出したと判定しても良い。また、テンプレートは、画像平面に射影したものが好ましいが、撮影したワーク130の世界座標系での姿勢が求めることができる場合は、撮影画像を世界座標系に変換してマッチングしても良い。尚、マッチング部105が検出した姿勢の情報は、警告判定部106に送られる。
【0027】
警告判定部106は、マッチング部105が検出した姿勢の情報から、マッチングしたテンプレートの安定度に関する情報をテンプレート記憶部122から取得し、更に、このワーク130に関する情報をワーク情報記憶部129から取得し、これらの情報に基づいて、ユーザーに警告を発するか、否かを判定する警告判定手段である。例えば、マッチング部105が検出したワーク130の姿勢が不安定である場合や、ワーク情報記憶部129に記憶された情報に基づきワーク130が保持されようとする領域が、ワーク130の保持禁止部分である場合、警告判定部106はユーザーへの警告の発信を判定する。
尚、ワーク130の保持禁止部分とは、例えば、ワーク130の内部や表面付近に電子回路や精密部品が実装され、ロボット10のハンド19が把持することで破壊されたり、精度が悪化したりする可能性が高い領域である。警告判定部106がユーザーへの警告の発信を判定した場合、警告信号生成部109に対して警告信号の生成を指示する。他方で、警告判定部106がユーザーへの警告の発信が不要であると判定した場合、姿勢補正指示部108に対してワーク130の姿勢補正を指示する。
【0028】
警告信号生成部109は、警告判定部106からの指示に応じて、ワーク130の姿勢が不良である旨の警告を表示手段に表示させ、ユーザーに通知する警告信号生成手段である。具体的には、警告信号生成部109は、UI(UserInterface)表示制御部134と表示灯制御部132に対して表示を指示する警告信号を生成する。この結果、UI表示制御部134は、警告を示すメッセージボックス(図示は略す)等をディスプレイ82上に表示させると共に、表示灯制御部132はランプを点灯させる。この結果、ユーザーはこれらの警告を視認し、ベルト搬送装置135を一時休止して、ワーク130姿勢の補正や、姿勢不良のワーク130の除外を行った後、ベルト搬送装置135の休止を解除する。尚、ユーザーへの警告は、上記した手段には限定されず、ユーザーに対して視聴覚的に警告する方法、例えば、音声等による警告を併用しても良い。
【0029】
姿勢補正指示部108は、警告判定部106からの指示に応じて、検出した姿勢に関する情報に基づき、ワーク130を所定の姿勢に変更すべく、ロボット10の駆動をロボット制御部126に指示する姿勢変更指示手段である。
ロボット制御部126とドライバー124は、アーム17等の稼動部の動作を制御する制御手段である。ロボット制御部126は、ワーク130の姿勢の変更指示に基づき、ロボット10を移動させるための複数のアクチュエーター30の駆動量を算出し、算出した駆動量に関する駆動情報をドライバー124に送る。ドライバー124は、ロボット制御部126から送られる駆動情報に基づいて、それぞれのアクチュエーター30毎に駆動信号を生成し、それぞれのアクチュエーター30に送る。この結果、アーム17が所定の位置まで移動し、ハンド19がワーク130を把持してワーク130を回転させたり、反転させたりして、ワーク130の姿勢を変更する。
【0030】
図4は、ワーク姿勢変更装置5によりロボット10がワーク130を把持して姿勢を変更する処理の流れを示すフローチャートである。この処理が実行されると、最初に、制御装置50は、取得したワーク130のCADデータを解析して、ワーク130の3次元形状のCADモデル150を抽出する(ステップS200)。
次に、制御装置50は、CADモデル150の姿勢を仮想的に変化させる(ステップS202)。次に、制御装置50は、変化させた姿勢毎の安定度を算出する(ステップS204)。
次に、制御装置50は、CADモデル150を射影して、テンプレートを生成する(ステップS206)。続いて、制御装置50は、生成したテンプレートを姿勢の安定度と関連付けて記憶する(ステップS208)。
次に、制御装置50は、ワーク130を撮影して撮影画像を取得する(ステップS215)。
【0031】
次に、制御装置50は、撮影画像と記憶されたテンプレートとをマッチングしてワーク130の姿勢を取得する(ステップS220)。
次に、制御装置50は、ワーク130の特性と取得した姿勢の安定度から、ユーザーに対して警告するか、否を判定する(ステップS225)。
ここで、制御装置50は、判定結果に応じた処理を指示する(ステップS230)。即ち、ユーザーに対して警告すると判定した場合(ステップS230でYes)、制御装置50は、ユーザーが注視すべくメッセージや光で警告し(ステップS235)、一連の処理を終了する。他方で、ユーザーに対して警告が不要であると判定した場合(ステップS230でNo)、制御装置50は、ロボット10にワーク130の姿勢の変更を指示し(ステップS240)、一連の処理を終了する。
上述した処理により、供給されるワーク130の取り得る姿勢の中から、それぞれの安定度を求め、ワーク130の撮影画像とのパターンマッチングを行ってワーク130が置かれた姿勢を認識し、その姿勢の安定度やワーク130の特性から、ワーク130の姿勢をロボット10に変更させるか、もしくは、ユーザーに対してワーク130の姿勢不良を警告するかが判定される。従って、例えば、ベルト搬送装置135上で他のワーク130と重なって不安定に載置されたワーク130を認識し、ユーザーに対して警告を通知するため、ユーザーは不安定な状態のワーク130をベルト搬送装置135上から除去したり、姿勢を矯正したりできるため、ロボット10のハンド19がワーク130の想定外の部分を把持することにより、ワーク130の外観が破壊されたり、ワーク130が有する機能が壊されたりすることを回避できる。
【符号の説明】
【0032】
5…ワーク姿勢変更装置、10…ロボット、11…第一軸、12…第二軸、13…第三軸、14…第四軸、15…第五軸、16…第六軸、17,17A,17B…アーム、18…手首、19…ハンド、20…デジタルカメラ、25…ロボットベース、30…アクチュエーター、50…制御装置、80…コンピューター、82…ディスプレイ、84…キーボード、85…ケーブル、100…テンプレートマッチング部、105…マッチング部、106…警告判定部、108…姿勢補正指示部、109…警告信号生成部、110…テンプレート取得部、112…CADデータ取得部、114…形状抽出部、116…射影部、118…テンプレート生成部、120…安定度算出部、122…テンプレート記憶部、124…ドライバー、126…ロボット制御部、128…CADデータベース、129…ワーク情報記憶部、130…ワーク、132…表示灯制御部、134…UI表示制御部、135…ベルト搬送装置、140…接触点算出部、145…安定性判定部、150…CADモデル、160…表示灯。
【特許請求の範囲】
【請求項1】
目標物の設計データを取得する取得手段と、
取得した前記設計データに基づいて前記目標物の形状を抽出する抽出手段と、
抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する射影手段と、
前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する算出手段と、
前記複数の射影像のそれぞれに応じたテンプレートを生成するテンプレート生成手段と、
生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する記憶手段と、
載置された前記目標物を撮影して撮影画像を出力する撮影手段と、
前記記憶手段に記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択するマッチング手段と、
選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する警告判定手段と、
前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する警告信号生成手段と、を備えることを特徴とするテンプレートマッチングシステム。
【請求項2】
請求項1に記載のテンプレートマッチングシステムにおいて、
前記算出手段は、
前記形状を前記複数の姿勢のそれぞれにおいて前記平面に近接させた場合、前記平面と最初に接触する前記形状の接触点を算出する接触点算出手段と、
前記複数の姿勢のそれぞれにおいて算出した前記接触点を支点として、前記平面に載置された前記形状の姿勢を仮想的に微小に変化させた後、前記形状の姿勢が元に戻るか、否かにより、前記目標物が前記複数の姿勢毎に載置された場合の安定度を判定する安定性判定手段と、を備えることを特徴とするテンプレートマッチングシステム。
【請求項3】
請求項1乃至2のいずれかに記載のテンプレートマッチングシステムにおいて、
前記警告判定手段は、前記テンプレートに応じた前記安定度に加え、前記目標物に関する情報に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定することを特徴とするテンプレートマッチングシステム。
【請求項4】
請求項1乃至3のいずれか1項に記載のテンプレートマッチングシステムにおいて、
前記警告信号は、表示手段に対して警告を示す情報を表示することを特徴とするテンプレートマッチングシステム。
【請求項5】
請求項1乃至4のいずれか1項に記載のテンプレートマッチングシステムにおいて、
前記目標物が載置された姿勢について警告しないと判定した場合、前記目標物を把持可能な姿勢変更手段に対して前記目標物の姿勢の変更を指示する姿勢変更指示手段を更に備えることを特徴とするテンプレートマッチングシステム。
【請求項6】
目標物の設計データを取得する工程と、
取得した前記設計データに基づいて前記目標物の形状を抽出する工程と、
抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する工程と、
前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する工程と、
前記複数の射影像のそれぞれに応じたテンプレートを生成する工程と、
生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する工程と、
載置された前記目標物を撮影して撮影画像を出力する工程と、
記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択する工程と、
選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する工程と、
前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する工程と、を備えることを特徴とするテンプレートマッチング方法。
【請求項1】
目標物の設計データを取得する取得手段と、
取得した前記設計データに基づいて前記目標物の形状を抽出する抽出手段と、
抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する射影手段と、
前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する算出手段と、
前記複数の射影像のそれぞれに応じたテンプレートを生成するテンプレート生成手段と、
生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する記憶手段と、
載置された前記目標物を撮影して撮影画像を出力する撮影手段と、
前記記憶手段に記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択するマッチング手段と、
選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する警告判定手段と、
前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する警告信号生成手段と、を備えることを特徴とするテンプレートマッチングシステム。
【請求項2】
請求項1に記載のテンプレートマッチングシステムにおいて、
前記算出手段は、
前記形状を前記複数の姿勢のそれぞれにおいて前記平面に近接させた場合、前記平面と最初に接触する前記形状の接触点を算出する接触点算出手段と、
前記複数の姿勢のそれぞれにおいて算出した前記接触点を支点として、前記平面に載置された前記形状の姿勢を仮想的に微小に変化させた後、前記形状の姿勢が元に戻るか、否かにより、前記目標物が前記複数の姿勢毎に載置された場合の安定度を判定する安定性判定手段と、を備えることを特徴とするテンプレートマッチングシステム。
【請求項3】
請求項1乃至2のいずれかに記載のテンプレートマッチングシステムにおいて、
前記警告判定手段は、前記テンプレートに応じた前記安定度に加え、前記目標物に関する情報に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定することを特徴とするテンプレートマッチングシステム。
【請求項4】
請求項1乃至3のいずれか1項に記載のテンプレートマッチングシステムにおいて、
前記警告信号は、表示手段に対して警告を示す情報を表示することを特徴とするテンプレートマッチングシステム。
【請求項5】
請求項1乃至4のいずれか1項に記載のテンプレートマッチングシステムにおいて、
前記目標物が載置された姿勢について警告しないと判定した場合、前記目標物を把持可能な姿勢変更手段に対して前記目標物の姿勢の変更を指示する姿勢変更指示手段を更に備えることを特徴とするテンプレートマッチングシステム。
【請求項6】
目標物の設計データを取得する工程と、
取得した前記設計データに基づいて前記目標物の形状を抽出する工程と、
抽出した前記形状を複数の姿勢で平面に射影した複数の射影像を生成する工程と、
前記複数の姿勢のそれぞれに応じて前記形状の姿勢を仮想的に変化させ、前記形状の姿勢が復元する結果に基づいて、前記目標物が前記複数の姿勢毎に載置された場合の安定度を算出する工程と、
前記複数の射影像のそれぞれに応じたテンプレートを生成する工程と、
生成した前記テンプレートおよび前記テンプレートに応じた前記安定度を記憶する工程と、
載置された前記目標物を撮影して撮影画像を出力する工程と、
記憶された前記テンプレートと、前記撮影画像とを比較して一致度を判定することにより、前記撮影画像に対応する前記テンプレートを選択する工程と、
選択した前記テンプレートに応じて記憶された前記安定度に基づいて、前記目標物が載置された姿勢について警告するか、否かを判定する工程と、
前記目標物が載置された姿勢について警告すると判定した場合、警告を示す警告信号を生成する工程と、を備えることを特徴とするテンプレートマッチング方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−210376(P2010−210376A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−56040(P2009−56040)
【出願日】平成21年3月10日(2009.3.10)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月10日(2009.3.10)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]