
ディスクリートトラックメディアの偏芯検出方法および偏芯検出装置
【課題】TDMにおいて、サーボパターンを参照することなくトラックの偏芯量および偏芯方向を検出できるトラック偏芯検出方法および偏芯検出装置を得る。
【解決手段】磁性体が存在するトラックと磁性材が存在しない溝を有するDTMのトラック中心とスピンドルモータの回転中心の偏芯を検出する偏芯検出方法であって、前記DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、前記所定領域に静止させたヘッドによって前記所定領域に書き込んだデータを読み出す段階と、前記読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出して偏芯量および偏芯方向を検出する静止検出段階と、を含む。
【解決手段】磁性体が存在するトラックと磁性材が存在しない溝を有するDTMのトラック中心とスピンドルモータの回転中心の偏芯を検出する偏芯検出方法であって、前記DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、前記所定領域に静止させたヘッドによって前記所定領域に書き込んだデータを読み出す段階と、前記読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出して偏芯量および偏芯方向を検出する静止検出段階と、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁性体が存在するトラックと磁性材が存在しない溝を有するディスクリートトラックメディアの偏芯検出方法および偏芯検出装置に関する。
【背景技術】
【0002】
近年、ハードディスク装置において、ディスク上に予め磁性層がトラックとして離散的に形成されているディスクリートトラックメディア(Discrete Track Media、以下「DTM」という)が開発されている。図1にDTM10の基本構造の概要を示した。DTM10は、基板11上にデータを記録する記録トラック13が形成されていて、記録トラック13と記録トラック13の間は溝(隙間)15になっている。そうして記録トラック13上にのみ磁性層14が形成されていて、溝15には磁性層がない。この構成により、磁気ヘッド23が磁性層14(記録トラック13)の上を飛んでいるときは信号が再生されるが、記録トラック13間(溝15)上にあるときは信号が出力されない。
【0003】
DTM10に予め形成された記録トラック13は、トラックピッチが概ね100nm以下と狭いため、DTM10をスピンドルモータに取り付ける場合、その記録トラック13の同心円中心Oと、スピンドルモータの回転中心Osを一致させるのは非常に困難である。そのため、装着精度を高めても、僅かながら偏芯を生じている(図2参照)。図2には、偏芯量Δdだけ偏芯した状態を示してある。磁性層が存在しないトラックに対する偏芯を測定、補正する方法、装置として、光ディスクに対するものは種々開発されている(特許文献1、特許文献2)。
【特許文献1】特開昭57-195337号公報
【特許文献2】特開昭61-11940号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このように偏芯したDTM10に対して磁気ヘッドを用いてデータの読み書きを行う場合、磁気ヘッドを動かすアクチュエータとその制御器を用いて磁気ヘッドを偏芯に追従させなければならない。しかしながら、ハードディスク装置の製品化における最終段階以降は、DTM上に何らかのサーボパターンが埋め込まれ、それに基づいて磁気ヘッドを位置決めするが、サーボパターンを埋め込む前や、埋め込んだ後も製造初期においてはサーボパターンの精度が不明なため、サーボパターンに基づく位置決めおよび追従は困難である。しかも前記偏芯状態で静止させた磁気ヘッド23によりDTM10の記録トラック13から信号を読み出すと、DTM10が1回転する間に磁気ヘッド23がトラック14を複数回横切ってしまい、間隙15と対向している間は信号を読み出すことができない(図2)。図2において、符号17は磁気ヘッドの移動軌跡である。そのため、DTM10上のサーボパターンを参照することなく偏芯量と偏芯方向を検出して磁気ヘッド23の位置決めおよび追従制御することが必要になる。しかし従来の光ディスク用の偏芯測定方法、装置は、光学ピックアップが必須であり、しかもDTMのトラックピッチは光ディスクのトラックピッチよりも遙かに狭いためDTMには適用できなかった。
【0005】
かかる従来技術の課題に基づいてなされた本発明は、TDMにおいて、サーボパターンを参照することなくトラックの偏芯量および偏芯方向を検出できるトラック偏芯検出方法および偏芯検出装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
かかる課題を解決する本発明は、磁性体が存在するトラックと磁性材が存在しない溝を有するDTMのトラック中心とスピンドルモータの回転中心の偏芯を検出する偏芯検出方法であって、前記DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、前記所定領域に静止させたヘッドによって前記所定領域に書き込んだデータを読み出す段階と、前記読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出して偏芯量および偏芯方向を検出する静止検出段階と、を含むことに特徴を有する。
【0007】
好ましくは、前記粗検出段階ではさらに、トラックオフセットも検出する。
より実際的には、前記検出段階の後に、前記静止させたヘッドで検出した偏芯量の所定分の一の偏芯量および偏芯方向を複数方向に設定して追従目標値として設定する段階と、該追従目標値に基づいて前記ヘッドを追従させながら読み出す段階と、該追従させながら読み出した読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出する追従検出段階と、前記追従検出段階で得られた最小回数を選択し、そのときの偏心量の所定分の一の偏心量を前記追従段階で設定した偏心量に加算して前記追従検出段階の再実行を複数回繰り返す段階とを含む。
前記繰り返し段階は、前記最小回数が所定値未満になるまで繰り返すことが好ましい。
【0008】
実際的には、ディスクリートメディアの偏芯検出方法によって検出した偏芯量、偏芯方向およびトラックオフセットに基づいてヘッドを追従制御させながら前記トラックの前記所定領域からデータを読み出す読み出し段階と、該読み出し信号のエンベロープ波形から偏芯量および偏芯方向を検出する精密検出段階と、を含むことに特徴有する。
【0009】
さらに、偏芯量をa、偏芯の方向をθ、トラック中心からのオフセットをεとしたときに、一周に渡るエンベロープ波形を下記式1によって表し、
y(t,a,θ,ε)=f(a cos(2πt+θ)+ε) ・・・(式1)
但し、0≦t≦k
kは周回
さらに式1で表されるエンベロープ波形および前記読み出し信号による実エンベロープ波形のデータを正規化してから内積を演算し、この内積値を最大化するパラメータa、θ、εの組を求めて、その組の各値を前記DTMの偏芯量、偏芯方向およびトラックオフセットとする。
より実際的には、前記パラメータa、θ、εの値を前記粗検出処理によって求めた値に基づいて複数の範囲に細分化し、各細分化した値ごとに前記(式1)からベクトルを算出し、全体のノルムで割って正規化する段階と、正規化した実エンベロープのサンプリングデータのベクトルとの内積をとる段階と、前記正規化する段階を前記全範囲に渡って実行する段階を含む。
【0010】
装置にかかる本発明は、磁性体が存在するトラックと磁性材が存在しない溝を有するDTMの偏芯測定装置であって、該DTMが装着されたスピンドルの回転に同期した信号を出力する同期手段と、前記DTMのトラックにデータを書き込み、書き込まれたデータを読み出すヘッドと、前記同期手段の出力に基づいて、前記DTMが1回転する間に前記ヘッドが読み出した読み出し信号の振幅を検出して磁性体が存在するトラック上と磁性体が存在しない溝をそれぞれヘッドが横切った回数を検出する横断検出手段と、前記読み出し信号の振幅を検出する振幅検出手段と、該振幅検出手段が検出した振幅の変化から偏芯量、偏芯方向およびトラック中心からのオフセットを算出する演算手段と、前記算出した偏芯の大きさ、方向およびオフセットに基づいて前記ヘッドを追従させるアクチュエータ制御手段と、前記アクチュエータ制御手段により追従制御しながら前記ヘッドで読み出した読み出し信号のエンベロープ波形を取り込み、該エンベロープ波形から偏芯方向、偏芯方向およびトラックオフセットを検出する検出手段と、を備えたことに特徴を有する。
【発明の効果】
【0011】
本発明によれば、偏芯量が不明な場合や偏芯量が大きいDTMであっても、サーボパターンを読み込むことなく、トラックカウントによって偏芯量、偏芯方向およびトラックオフセットを検出することができる。
さらにこの検出結果に基づいて磁気ヘッドを追従制御することにより、読み出し信号のエンベロープ波形を検出して、より精度の高い偏芯量、偏芯方向およびトラックオフセットを検出することができる。
【発明を実施するための最良の形態】
【0012】
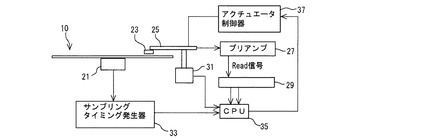
本発明について添付の図面に示した実施形態を参照して説明する。図3は、本発明にかかるトラック偏芯検出装置の実施形態の主要回路構成をブロックで示す図である。
【0013】
DTM10は、スピンドルモータ21に装着されている。磁気ヘッド23は、アクチュエータ25の先端部に支持されていて、このアクチュエータ25によって、DTM10に対してロード/アンロードされ、さらにトラック13に対して追従制御される。このトラック偏芯検出装置はさらに、磁気ヘッド23からの信号を増幅するプリアンプ27と、プリアンプ27の出力信号である読み出し信号から、磁気ヘッド23がトラック13を横断した回数および読み出し信号のエンベロープを検出するトラック/振幅波形検出器29と、アクチュエータ25の絶対位置(絶対角度)を検出するエンコーダ31と、スピンドルモータ21またはDTM10の回転に同期して、エンコーダ31の出力をサンプリングするタイミングを決定するサンプリングタイミング発生器33と、トラック/振幅波形検出器29の出力およびエンコーダ31の出力を読み込み、偏芯量、偏芯方向およびトラックオフセットを求めるCPU35を備えている。なお、アクチュエータ25は、アクチュエータ制御器37を介してCPU35により制御される。
【0014】
「振幅波形検出器」
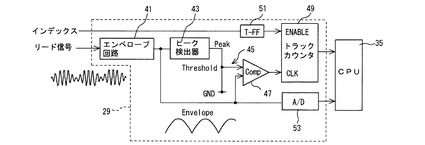
図4には、トラック/振幅波形検出器29のさらに詳細なブロックダイアグラムを示した。このトラック/振幅波形検出器29は、磁気ヘッド23から出力された読み出し信号(プリアンプ27で増幅された読み出し信号)の振幅のエンベロープを検出するエンベロープ回路41と、該エンベロープ回路41が検出したエンベロープの最大値を保持するピーク保持回路43と、ピーク保持回路43が保持した最大値を参照して信号の有無を判定するしきい値を決めるしきい値設定回路45と、しきい値設定回路45が設定したしきい値とエンベロープ回路41が検出したエンベロープを比較して信号(トラック)の有無を検出するコンパレータ47と、コンパレータ47の出力をカウントするトラックカウンタ49と、トラックカウンタ49がカウントするタイミングを一周と規定するためのインデックス信号の入力を受けるとイネーブル信号を出力するトグルフリップフロップ51と、エンベロープ回路41が出力したエンベロープを直接取り込むA/Dコンバータ53とを備えている。A/Dコンバータ53の出力およびトラックカウンタ49の出力はCPU35に出力され、これらの出力に基づいてCPU35は所定の演算を実行する。
なお、インデックス信号は、記録トラック13上に記録されたインデックス信号領域19に記録されたインデックス信号を磁気ヘッド23に読み出される。もしくは、スピンドルに取り付けられたサンプリングタイミング発生器(図3−33)から出力される。
【0015】
DTM10には、最初に書き込み用磁気ヘッド23により、偏芯を無視して、想定される偏芯の量以上に相当するトラック数(N1-Nmax)に渡り、一様にデータを書き込んでおく。書き込むデータは、ピーク検出器43のディケイ時定数より十分高周波であれば制限はないが、通常は数十MHzから数百MHzとする。
【0016】
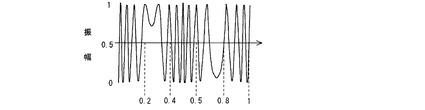
磁気ヘッド23を、書き込んだトラック数(N1-Nmax)の中央の記録トラック13上に静止させてデータを読み出し、一周に渡りその振幅の時間変化を検出する。図5にその様子をグラフで示した。同グラフにおいて、横軸は経過時間、縦軸は振幅である。このグラフは、偏芯量Δdが3.3トラック、偏芯方向が、一周に一回出力されるインデックス信号(インデックス信号領域19)に対してπ/2回転した方向であり、また磁気ヘッド23のトラック中心に対するオフセット量が半径方向に1/4トラック分ずれた例である。
【0017】
磁気ヘッド23が磁性層14(記録トラック13)と対向しているときは強い信号が出力されるので大きな振幅が検出されるが、磁性層14(記録トラック13)と対向していないときは信号が出力されないため、振幅はゼロである。偏芯がある状態で回転するDTM10を静止した磁気ヘッド23が読み取ると、磁性層14と対向している状態と磁性層14がない部分(間隙15)に対向している状態が交番的に現れるため、図5に示した振幅波形が得られる。グラフでは、振幅波形が中間の横軸を横切るときに、記録トラック13の内周または外周エッジを超えている。また、一周は2πであるから、π/2と3π/2の前後、図5では正規化時刻0.25と0.75の前後では振幅変化が少なく、逆に0とπの前後、正規化時刻0と0.5の前後では振幅変化が激しくなっている。ここで、振幅変化が少ない領域は横切るトラック数が少ないことを現し、振幅変化が激しい領域は横切るトラックが多数であることを現している。
【0018】
したがって、振幅変化が激しい二つの回転角の略中間、または振幅変化が小さい二つの回転角の略中心角方向にトラック円の中心Oが存在することが分かる。言い替えると、振幅変化が最小となるときに、スピンドルの回転中心Odとトラック円の中心Oを通る半径方向の仮想線が磁気ヘッド23を横切ることが分かるので、およその偏芯方向が分かる。つまり、一周分のトラックカウンタ49のカウント値に基づいて、およその偏芯方向および偏芯量が分かる。
【0019】
「制御方法」
本実施形態のトラック偏芯検出方法は、読み出し波形から、図5の波形に相当する振幅波形を検出する段階と、検出した振幅波形から偏芯量、偏芯の方向、およびトラックオフセット量を絞り込み、または推定する段階を含む推定方法、および絞り込んだ、または推定した偏芯トラックに対して追従させる追従方法から構成される。
【0020】
前記推定方法はさらに、偏芯量が非常に大きい場合にある程度まで絞り込む段階(偏芯粗検出段階)と、このように絞り込んだ後に、より高精度に偏芯量と偏芯の方向とトラックオフセット量を推定する段階(偏芯精密検出段階)の二段階から構成され、各段階において絞り込んだ、または推定した偏芯トラックに対して追従させる。
【0021】
図6に、エンベロープ回路41により検出されたエンベロープ波形とトラックカウンタ49から出力されるトラックパルスの関係をグラフで示した。このグラフおよび図5に示したグラフからも分かるように、このトラック/振幅波形検出器29によれば、偏芯量が多い場合は横断するトラック13の数をトラックカウンタ49により検出し、偏芯量が少ない場合はA/Dコンバータ53により直接エンベロープを取り込むことが可能になる。つまり、偏芯量が多い場合はリード信号から横断するトラック数を検出(粗検出)することによっておおよその偏芯を測定(粗測定)し、偏芯量が少ない場合はリード信号のエンベロープを取り込んでエンベロープに基づいて偏芯を精密測定する。
【0022】
「偏芯量が多い場合」
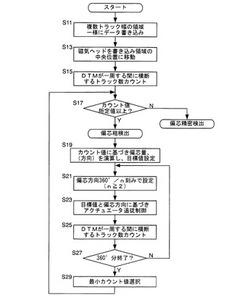
次に、偏芯量が多い場合のトラック偏芯検出方法(偏芯粗検出方法)について、さらに図10に示したフローチャートを参照して説明する。なお、この実施形態では、通常、最初は偏芯量が未知なので、偏芯量にかかわらず、磁気ヘッド23を横断するトラック数を検出する処理を最初に実行する。
【0023】
まず、磁気ヘッド23により、偏芯を無視して、想定される偏芯の量以上に相当するトラック数(N1-Nmax)に渡り、書き込み領域がオーバーラップする間隔となるようにアクチュエータ25を駆動制御しながら一様にデータを書き込む(ステップS11)。
【0024】
次に、アクチュエータ25を駆動して磁気ヘッド23を前記書き込み領域の半径方向中央位置まで移動させてアクチュエータ25を停止させる(ステップS13)。この静止状態でDTM10が一周する間に磁気ヘッド23が横断するトラック数をカウントする静止検出処理を実行する(ステップS15)。カウント値が所定値よりも大きい場合(ステップS17:Y)、つまり偏芯量が多い場合は横断するトラック数が多く、A/Dコンバータ53でエンベロープを取り込むことが困難なため、カウント値が所定値以上、例えば、100以上の場合は、偏芯粗検出処理により、トラックカウンタ49の値に基づいて大まかな偏芯の方向を求める偏芯粗検出処理に進む。この偏芯粗検出処理は、磁気ヘッド23を追従させながら検出する追従検出処理である。
【0025】
アクチュエータ25が静止した状態で一周に渡り測定したトラックカウンタ49のカウント値により、偏芯量のおよその値が分かる。例えば、カウント値が8の場合は、カウント値8の四分の一、つまり2本のトラックピッチ分がおよその偏芯量となる。そこで、その偏芯量に基づいた偏芯量、例えば半分に相当する量の偏芯量をアクチュエータ制御の目標値に設定する(ステップS21)。アクチュエータ制御器37には、アクチュエータ25に取り付けられたエンコーダ31の出力値を参照させて、偏芯が重畳された目標値に対して追従させる。
【0026】
十分な精度で偏芯目標値に追従させるためには、エンコーダ31の出力をサンプリングするタイミングがスピンドルモータ21の回転に同期していなければならない。そこで、一周に渡る偏芯の方向を360゜/n以下(但し、n≧2の整数)、つまり、180゜以下、例えば30゜刻みで設定する(ステップS23)。設定した偏芯方向および測定した偏芯量の半分からなる目標値に基づいてアクチュエータ25を追従制御させながら(ステップS23)、一周分のカウント値を各角度について測定する(ステップS25)。以上のカウント処理を、360゜分繰り返す(ステップS27:N、ステップS21)。
【0027】
以上のトラックパルス数のカウント処理によれば、実際の偏芯方向に近い角度におけるカウント値が他の角度におけるカウント値に比べて小さくなる。そこで、360゜分のカウント処理が終了すると(ステップS27、Y)、取得した測定値に基づいて偏芯の方向を絞り込み、例えば最小のカウント値を選択し(ステップS29)、新たな偏芯量に相当するトラックパルス数以下、例えば、半数分に相当する量の偏芯をアクチュエータ制御の目標値に加えて、ステップS17に戻る。
【0028】
以上のステップS17乃至S29の処理を繰り返すと、アクチュエータ制御の目標値が徐々にDTM10の偏芯の量と方向に近づく。このようにしてトラックパルスのカウント値が十分に小さくなると、エンベロープ波形の周波数が低くなるので、A/Dコンバータ53によってエンベロープ波形の取り込みが可能になり、以降の偏芯量が少ない場合の偏芯精密検出処理に引き継ぐことができる。つまり、カウント値が所定値以上でなくなったら(ステップS15:N)、偏芯精密検出処理に進む。この実施形態では、カウント値が100未満まで絞り込めた後に、エンベロープ波形の取り込みに移行する。
なお、この実施形態では一周を等分割して各角度を偏芯方向と設定してトラック数をカウントしたが、ステップS15における一周分のカウント値の出力タイミングからおよその偏芯方向が分かっているので、その偏芯方向を含む所定範囲に絞って横断するトラック数のカウントを実施してもよい。
【0029】
「偏芯量が少ない場合」
カウント値が所定値以上でない場合(ステップS17:N)、つまり偏芯量が少なく、アクチュエータ制御器37が偏芯に追従できるほど偏芯量が絞り込まれると、偏芯精密検出処理に進む。偏芯精密検出処理では、A/Dコンバータ53によりエンベロープ波形を取り込み、エンベロープ波形から偏芯量と偏芯の方向、およびトラックオフセット値を直接算出する。偏芯量が少ない場合の偏芯精密検出処理を、図11に示したフローチャートを参照して説明する。
【0030】
磁気ヘッド23によりDTM10の記録トラック13をリードし、A/D変換して得たエンベロープ波形の振幅の変化をf(x)として得る(ステップS101)。変数xは磁気ヘッド23の半径方向の位置を表していて、整数部がトラック番号、小数部はトラック中心からのオフセットを示している。このようにして得た振幅f(x)は、図7に示したようなプロファイルを示す。図7において、縦軸は振幅、横軸は半径方向位置を示している。なお、偏芯量が少な過ぎて有効な振幅変化が得られない場合には最大、最小振幅を一周で捕らえるのに十分な偏芯量、例えばトラックピッチの数倍程度の偏芯を与える。
【0031】
偏芯は一周に渡る正弦波のトラックずれなので、
偏芯量をa、
偏芯の方向をθ、
トラック中心からのオフセットをε、
として、一周に渡るエンベロープ波形yを下記(式1)に示した関数として表すことができる。
y(t,a,θ,ε)=f(a cos(2πt+θ)+ε) ・・・(式1)
但し、0≦t≦k
kは周回を表している。
【0032】
ここで、(式1)により表されるエンベロープ波形と、A/D変換された実エンベロープ波形のデータをベクトルと考えると、それぞれ正規化してから内積を演算し、この内積値を最大化するパラメータa、θ、εの組を求めるとその組の各値がそのときの偏芯量、偏芯の方向およびトラックオフセットを表している。そこで本実施形態では、この内積値を最大化するパラメータa、θ、εの組をサーチする。
【0033】
ここで、パラメータaとθは、前述の偏芯粗検出処理においてカウントしたトラックパルスによりおおよその値が求められているので、各パラメータa、θ、εの範囲を事前に、下記(条件1)のように絞り込む(ステップS103)。
(条件1) a0≦a≦a1、θ0≦θ≦θ1、-0.5≦ε≦0.5
ここで、範囲[a0,a1]、[θ0,θ1]は、事前に絞り込まれた範囲である。なお、トラックオフセットεはもう少し範囲を拡げ、例えば-1≦ε≦1としてもよい。
【0034】
以上の(条件1)の範囲をそれぞれ細分化し、例えば100分割して、細分化したパラメータ値毎に(式1)からデータのベクトルを算出し(ステップS105)、全体のノルムで割ることで正規化する(ステップS107)。その後同様に全値から求めたノルムで正規化した実エンベロープのサンプリングデータのベクトルとの内積をとる(ステップS109)。
【0035】
これを(条件1)の全範囲に渡って実行する。このようにして求めた内積を最大にするパラメータの組が、求めるパラメータa、θ、εの推定値となるので、その偏芯量a、偏芯方向θ、オフセットεを制御目標に設定し(ステップS111)、トラック偏芯検出処理を終了する。
【0036】
「有効性の検証」
以上の本発明のDTMトラック偏芯検出方法の有効性を実証するために、
f(x)=0.5cos(x)+0.5
としたときのシミュレーション結果について説明する。この実証例では、偏芯の振幅の最大値から最大値までの振幅値aを3.3、偏芯の方向θを0.2π、トラックオフセットを0.1として、10周に渡ってエンベロープ波形を取得する。すなわちエンベロープ波形は、次の(式2)によって表すことができる。
0.5cos(3.3πcos(2πt+0.2π)+0.1π)+0.5 ・・・(式2)
ただし、t:(0,10)
【0037】
ここで、10周のうち、3周分(t:(0,3))を図8にグラフとして示した。ただし、一周当たりのサンプル数は100個である。
【0038】
式(2)より、100(サンプル/周)×10周=1000サンプルのデータ列を得られる。これをベクトルLとし、ベクトルLのノルム(各要素の自乗和の平方根(自乗平均平方根:Root Mean Square (RMS))をとり、絶対値|L|とする。
【0039】
一方、偏芯量が多い場合のトラック偏芯粗検出処理により得たトラック横断パルス状況から、偏芯の量はほぼ3トラック前後、すなわち3-1=2から、3+1=4トラックの間にあると推定できる。また、同様にトラック偏芯粗検出処理からθが0〜π/6であると推定できる。トラックオフセットεについては情報がないので、その範囲を前述のように-0.5から0.5の間に設定する。
【0040】
(式1)において、tを0.01ステップで0から10まで変化させながら測定し、下記の(式3)からなるベクトルm(a,θ,ε)を作る。
m(a,θ,ε)={y(0,a,θ,ε)、y(0.01,a,θ,ε)、・・・y(9.99,a,θ,ε)、y(10,a,θ,ε)} ・・・(式3)
そうして偏芯量aを2から4まで0.01ステップで、偏芯方向θを0からπ/6まで1゜刻みで、トラックオフセットεを-1から1まで0.01ステップで変化させて全ての組についてノルム|m(a,θ,ε)|を求め、下記(式4)を演算する。
P(a,θ,ε)=Lm(a,θ,ε)/{|L||m(a,θ,ε)|} ・・・(式4)
(式4)において、P(a,θ,ε)が最大値をとるときのa、θ、εの値が、推定値となる。
【0041】
以上の様子を図9(A)乃至(C)に三次元グラフ化して示した。ここでは理解を容易にする視覚化のために、上記の(条件1)に若干の幅を加え、偏芯量aを1から5、εを-1から1に変化させたときのP(a,θ,ε)を、偏芯方向θを0.1、0.2、0.3と変化させてそれぞれプロットしてある。
【0042】
以上の結果から、(a,θ,ε)=(3.3,0.2,0.1)のときに最大値1をとる大きな山があり、パラメータは元の偏芯の各値と一致することが分かる。
また、この最大値以外の点では、
P(a,θ,ε)<0.5
満足しており、推定値として十分なSNが得られている。
【0043】
以上の通りDTMのトラック偏芯検出方法および検出装置の実施形態によれば、偏芯量が複数のトラックピッチ以上あっても、磁気ヘッドの読み出し信号から磁気ヘッドがトラックを横断する数、そのタイミングを検出しておおよその偏芯量、偏芯方向およびトラックオフセットを検出することができるので、サーボパターンが書き込まれる前のDTMについて偏芯量、偏芯方向およびトラックオフセットを検出し、磁気ヘッドを追従制御させることが可能になる。さらに磁気ヘッドを追従制御させることが可能になると、追従制御させながら読み出して読み出し信号のエンベロープを検出して、精密な偏芯量、偏芯方向およびトラックオフセットを検出することが可能になるので、検出した偏芯量、偏芯方向およびトラックオフセットを設定することができる。このように本実施形態によれば、トラックピッチが非常に狭いDTMであっても、サーボパターンを書き込む前に偏芯量、偏芯方向およびトラックオフセットを検出して、磁気ヘッドを追従制御させることができる。
【図面の簡単な説明】
【0044】
【図1】本発明の偏芯検出装置および偏芯検出方法により偏芯を検出するディスクリートトラックメディア(DTM)の基本構造の概要を示す図である。
【図2】偏芯したDTMの記録トラックと磁気ヘッドの移動軌跡との関係を示す図である。
【図3】本発明にかかるトラック偏芯検出装置の実施形態の主要回路構成をブロックで示す図である。
【図4】同トラック偏芯検出装置に含まれるトラック/振幅波形検出器の主要回路構成をブロックで示す図である。
【図5】磁気ヘッドを静止させて読み込んだデータ信号の振幅の時間変化をグラフで示す図である。
【図6】トラック偏芯検出装置のエンベロープ回路により検出されたエンベロープ波形とトラックカウンタから出力されるトラックパルスの関係をグラフで示す図である。
【図7】磁気ヘッドによる読み出し信号の振幅とトラック位置との関係をグラフで示す図である。
【図8】シミュレーションによる3周分の振幅の時間変化をグラフで示す図である。
【図9】シミュレーションによる偏芯の量、偏芯の方向およびトラックオフセットを三次元グラフによって示す図である。
【図10】本発明のトラック偏芯検出装置の動作である偏芯粗検出方法をフローチャートで示す図である。
【図11】本発明のトラック偏芯検出装置の動作である偏芯精密検出方法をフローチャートで示す図である。
【符号の説明】
【0045】
10 DTM
11 基板
13 記録トラック
14 磁性層
15 溝
17 磁気ヘッドの移動軌跡
21 スピンドルモータ
23 磁気ヘッド
25 アクチュエータ
27 プリアンプ
29 トラック/振幅波形検出器
31 エンコーダ
33 サンプリングタイミング発生器
35 CPU(検出手段)
37 アクチュエータ制御回路
41 エンベロープ回路
43 ピーク保持回路
45 しきい値設定回路
47 コンパレータ
49 トラックカウンタ
51 トグルフリップフロップ
53 A/Dコンバータ
【技術分野】
【0001】
本発明は、磁性体が存在するトラックと磁性材が存在しない溝を有するディスクリートトラックメディアの偏芯検出方法および偏芯検出装置に関する。
【背景技術】
【0002】
近年、ハードディスク装置において、ディスク上に予め磁性層がトラックとして離散的に形成されているディスクリートトラックメディア(Discrete Track Media、以下「DTM」という)が開発されている。図1にDTM10の基本構造の概要を示した。DTM10は、基板11上にデータを記録する記録トラック13が形成されていて、記録トラック13と記録トラック13の間は溝(隙間)15になっている。そうして記録トラック13上にのみ磁性層14が形成されていて、溝15には磁性層がない。この構成により、磁気ヘッド23が磁性層14(記録トラック13)の上を飛んでいるときは信号が再生されるが、記録トラック13間(溝15)上にあるときは信号が出力されない。
【0003】
DTM10に予め形成された記録トラック13は、トラックピッチが概ね100nm以下と狭いため、DTM10をスピンドルモータに取り付ける場合、その記録トラック13の同心円中心Oと、スピンドルモータの回転中心Osを一致させるのは非常に困難である。そのため、装着精度を高めても、僅かながら偏芯を生じている(図2参照)。図2には、偏芯量Δdだけ偏芯した状態を示してある。磁性層が存在しないトラックに対する偏芯を測定、補正する方法、装置として、光ディスクに対するものは種々開発されている(特許文献1、特許文献2)。
【特許文献1】特開昭57-195337号公報
【特許文献2】特開昭61-11940号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このように偏芯したDTM10に対して磁気ヘッドを用いてデータの読み書きを行う場合、磁気ヘッドを動かすアクチュエータとその制御器を用いて磁気ヘッドを偏芯に追従させなければならない。しかしながら、ハードディスク装置の製品化における最終段階以降は、DTM上に何らかのサーボパターンが埋め込まれ、それに基づいて磁気ヘッドを位置決めするが、サーボパターンを埋め込む前や、埋め込んだ後も製造初期においてはサーボパターンの精度が不明なため、サーボパターンに基づく位置決めおよび追従は困難である。しかも前記偏芯状態で静止させた磁気ヘッド23によりDTM10の記録トラック13から信号を読み出すと、DTM10が1回転する間に磁気ヘッド23がトラック14を複数回横切ってしまい、間隙15と対向している間は信号を読み出すことができない(図2)。図2において、符号17は磁気ヘッドの移動軌跡である。そのため、DTM10上のサーボパターンを参照することなく偏芯量と偏芯方向を検出して磁気ヘッド23の位置決めおよび追従制御することが必要になる。しかし従来の光ディスク用の偏芯測定方法、装置は、光学ピックアップが必須であり、しかもDTMのトラックピッチは光ディスクのトラックピッチよりも遙かに狭いためDTMには適用できなかった。
【0005】
かかる従来技術の課題に基づいてなされた本発明は、TDMにおいて、サーボパターンを参照することなくトラックの偏芯量および偏芯方向を検出できるトラック偏芯検出方法および偏芯検出装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
かかる課題を解決する本発明は、磁性体が存在するトラックと磁性材が存在しない溝を有するDTMのトラック中心とスピンドルモータの回転中心の偏芯を検出する偏芯検出方法であって、前記DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、前記所定領域に静止させたヘッドによって前記所定領域に書き込んだデータを読み出す段階と、前記読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出して偏芯量および偏芯方向を検出する静止検出段階と、を含むことに特徴を有する。
【0007】
好ましくは、前記粗検出段階ではさらに、トラックオフセットも検出する。
より実際的には、前記検出段階の後に、前記静止させたヘッドで検出した偏芯量の所定分の一の偏芯量および偏芯方向を複数方向に設定して追従目標値として設定する段階と、該追従目標値に基づいて前記ヘッドを追従させながら読み出す段階と、該追従させながら読み出した読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出する追従検出段階と、前記追従検出段階で得られた最小回数を選択し、そのときの偏心量の所定分の一の偏心量を前記追従段階で設定した偏心量に加算して前記追従検出段階の再実行を複数回繰り返す段階とを含む。
前記繰り返し段階は、前記最小回数が所定値未満になるまで繰り返すことが好ましい。
【0008】
実際的には、ディスクリートメディアの偏芯検出方法によって検出した偏芯量、偏芯方向およびトラックオフセットに基づいてヘッドを追従制御させながら前記トラックの前記所定領域からデータを読み出す読み出し段階と、該読み出し信号のエンベロープ波形から偏芯量および偏芯方向を検出する精密検出段階と、を含むことに特徴有する。
【0009】
さらに、偏芯量をa、偏芯の方向をθ、トラック中心からのオフセットをεとしたときに、一周に渡るエンベロープ波形を下記式1によって表し、
y(t,a,θ,ε)=f(a cos(2πt+θ)+ε) ・・・(式1)
但し、0≦t≦k
kは周回
さらに式1で表されるエンベロープ波形および前記読み出し信号による実エンベロープ波形のデータを正規化してから内積を演算し、この内積値を最大化するパラメータa、θ、εの組を求めて、その組の各値を前記DTMの偏芯量、偏芯方向およびトラックオフセットとする。
より実際的には、前記パラメータa、θ、εの値を前記粗検出処理によって求めた値に基づいて複数の範囲に細分化し、各細分化した値ごとに前記(式1)からベクトルを算出し、全体のノルムで割って正規化する段階と、正規化した実エンベロープのサンプリングデータのベクトルとの内積をとる段階と、前記正規化する段階を前記全範囲に渡って実行する段階を含む。
【0010】
装置にかかる本発明は、磁性体が存在するトラックと磁性材が存在しない溝を有するDTMの偏芯測定装置であって、該DTMが装着されたスピンドルの回転に同期した信号を出力する同期手段と、前記DTMのトラックにデータを書き込み、書き込まれたデータを読み出すヘッドと、前記同期手段の出力に基づいて、前記DTMが1回転する間に前記ヘッドが読み出した読み出し信号の振幅を検出して磁性体が存在するトラック上と磁性体が存在しない溝をそれぞれヘッドが横切った回数を検出する横断検出手段と、前記読み出し信号の振幅を検出する振幅検出手段と、該振幅検出手段が検出した振幅の変化から偏芯量、偏芯方向およびトラック中心からのオフセットを算出する演算手段と、前記算出した偏芯の大きさ、方向およびオフセットに基づいて前記ヘッドを追従させるアクチュエータ制御手段と、前記アクチュエータ制御手段により追従制御しながら前記ヘッドで読み出した読み出し信号のエンベロープ波形を取り込み、該エンベロープ波形から偏芯方向、偏芯方向およびトラックオフセットを検出する検出手段と、を備えたことに特徴を有する。
【発明の効果】
【0011】
本発明によれば、偏芯量が不明な場合や偏芯量が大きいDTMであっても、サーボパターンを読み込むことなく、トラックカウントによって偏芯量、偏芯方向およびトラックオフセットを検出することができる。
さらにこの検出結果に基づいて磁気ヘッドを追従制御することにより、読み出し信号のエンベロープ波形を検出して、より精度の高い偏芯量、偏芯方向およびトラックオフセットを検出することができる。
【発明を実施するための最良の形態】
【0012】
本発明について添付の図面に示した実施形態を参照して説明する。図3は、本発明にかかるトラック偏芯検出装置の実施形態の主要回路構成をブロックで示す図である。
【0013】
DTM10は、スピンドルモータ21に装着されている。磁気ヘッド23は、アクチュエータ25の先端部に支持されていて、このアクチュエータ25によって、DTM10に対してロード/アンロードされ、さらにトラック13に対して追従制御される。このトラック偏芯検出装置はさらに、磁気ヘッド23からの信号を増幅するプリアンプ27と、プリアンプ27の出力信号である読み出し信号から、磁気ヘッド23がトラック13を横断した回数および読み出し信号のエンベロープを検出するトラック/振幅波形検出器29と、アクチュエータ25の絶対位置(絶対角度)を検出するエンコーダ31と、スピンドルモータ21またはDTM10の回転に同期して、エンコーダ31の出力をサンプリングするタイミングを決定するサンプリングタイミング発生器33と、トラック/振幅波形検出器29の出力およびエンコーダ31の出力を読み込み、偏芯量、偏芯方向およびトラックオフセットを求めるCPU35を備えている。なお、アクチュエータ25は、アクチュエータ制御器37を介してCPU35により制御される。
【0014】
「振幅波形検出器」
図4には、トラック/振幅波形検出器29のさらに詳細なブロックダイアグラムを示した。このトラック/振幅波形検出器29は、磁気ヘッド23から出力された読み出し信号(プリアンプ27で増幅された読み出し信号)の振幅のエンベロープを検出するエンベロープ回路41と、該エンベロープ回路41が検出したエンベロープの最大値を保持するピーク保持回路43と、ピーク保持回路43が保持した最大値を参照して信号の有無を判定するしきい値を決めるしきい値設定回路45と、しきい値設定回路45が設定したしきい値とエンベロープ回路41が検出したエンベロープを比較して信号(トラック)の有無を検出するコンパレータ47と、コンパレータ47の出力をカウントするトラックカウンタ49と、トラックカウンタ49がカウントするタイミングを一周と規定するためのインデックス信号の入力を受けるとイネーブル信号を出力するトグルフリップフロップ51と、エンベロープ回路41が出力したエンベロープを直接取り込むA/Dコンバータ53とを備えている。A/Dコンバータ53の出力およびトラックカウンタ49の出力はCPU35に出力され、これらの出力に基づいてCPU35は所定の演算を実行する。
なお、インデックス信号は、記録トラック13上に記録されたインデックス信号領域19に記録されたインデックス信号を磁気ヘッド23に読み出される。もしくは、スピンドルに取り付けられたサンプリングタイミング発生器(図3−33)から出力される。
【0015】
DTM10には、最初に書き込み用磁気ヘッド23により、偏芯を無視して、想定される偏芯の量以上に相当するトラック数(N1-Nmax)に渡り、一様にデータを書き込んでおく。書き込むデータは、ピーク検出器43のディケイ時定数より十分高周波であれば制限はないが、通常は数十MHzから数百MHzとする。
【0016】
磁気ヘッド23を、書き込んだトラック数(N1-Nmax)の中央の記録トラック13上に静止させてデータを読み出し、一周に渡りその振幅の時間変化を検出する。図5にその様子をグラフで示した。同グラフにおいて、横軸は経過時間、縦軸は振幅である。このグラフは、偏芯量Δdが3.3トラック、偏芯方向が、一周に一回出力されるインデックス信号(インデックス信号領域19)に対してπ/2回転した方向であり、また磁気ヘッド23のトラック中心に対するオフセット量が半径方向に1/4トラック分ずれた例である。
【0017】
磁気ヘッド23が磁性層14(記録トラック13)と対向しているときは強い信号が出力されるので大きな振幅が検出されるが、磁性層14(記録トラック13)と対向していないときは信号が出力されないため、振幅はゼロである。偏芯がある状態で回転するDTM10を静止した磁気ヘッド23が読み取ると、磁性層14と対向している状態と磁性層14がない部分(間隙15)に対向している状態が交番的に現れるため、図5に示した振幅波形が得られる。グラフでは、振幅波形が中間の横軸を横切るときに、記録トラック13の内周または外周エッジを超えている。また、一周は2πであるから、π/2と3π/2の前後、図5では正規化時刻0.25と0.75の前後では振幅変化が少なく、逆に0とπの前後、正規化時刻0と0.5の前後では振幅変化が激しくなっている。ここで、振幅変化が少ない領域は横切るトラック数が少ないことを現し、振幅変化が激しい領域は横切るトラックが多数であることを現している。
【0018】
したがって、振幅変化が激しい二つの回転角の略中間、または振幅変化が小さい二つの回転角の略中心角方向にトラック円の中心Oが存在することが分かる。言い替えると、振幅変化が最小となるときに、スピンドルの回転中心Odとトラック円の中心Oを通る半径方向の仮想線が磁気ヘッド23を横切ることが分かるので、およその偏芯方向が分かる。つまり、一周分のトラックカウンタ49のカウント値に基づいて、およその偏芯方向および偏芯量が分かる。
【0019】
「制御方法」
本実施形態のトラック偏芯検出方法は、読み出し波形から、図5の波形に相当する振幅波形を検出する段階と、検出した振幅波形から偏芯量、偏芯の方向、およびトラックオフセット量を絞り込み、または推定する段階を含む推定方法、および絞り込んだ、または推定した偏芯トラックに対して追従させる追従方法から構成される。
【0020】
前記推定方法はさらに、偏芯量が非常に大きい場合にある程度まで絞り込む段階(偏芯粗検出段階)と、このように絞り込んだ後に、より高精度に偏芯量と偏芯の方向とトラックオフセット量を推定する段階(偏芯精密検出段階)の二段階から構成され、各段階において絞り込んだ、または推定した偏芯トラックに対して追従させる。
【0021】
図6に、エンベロープ回路41により検出されたエンベロープ波形とトラックカウンタ49から出力されるトラックパルスの関係をグラフで示した。このグラフおよび図5に示したグラフからも分かるように、このトラック/振幅波形検出器29によれば、偏芯量が多い場合は横断するトラック13の数をトラックカウンタ49により検出し、偏芯量が少ない場合はA/Dコンバータ53により直接エンベロープを取り込むことが可能になる。つまり、偏芯量が多い場合はリード信号から横断するトラック数を検出(粗検出)することによっておおよその偏芯を測定(粗測定)し、偏芯量が少ない場合はリード信号のエンベロープを取り込んでエンベロープに基づいて偏芯を精密測定する。
【0022】
「偏芯量が多い場合」
次に、偏芯量が多い場合のトラック偏芯検出方法(偏芯粗検出方法)について、さらに図10に示したフローチャートを参照して説明する。なお、この実施形態では、通常、最初は偏芯量が未知なので、偏芯量にかかわらず、磁気ヘッド23を横断するトラック数を検出する処理を最初に実行する。
【0023】
まず、磁気ヘッド23により、偏芯を無視して、想定される偏芯の量以上に相当するトラック数(N1-Nmax)に渡り、書き込み領域がオーバーラップする間隔となるようにアクチュエータ25を駆動制御しながら一様にデータを書き込む(ステップS11)。
【0024】
次に、アクチュエータ25を駆動して磁気ヘッド23を前記書き込み領域の半径方向中央位置まで移動させてアクチュエータ25を停止させる(ステップS13)。この静止状態でDTM10が一周する間に磁気ヘッド23が横断するトラック数をカウントする静止検出処理を実行する(ステップS15)。カウント値が所定値よりも大きい場合(ステップS17:Y)、つまり偏芯量が多い場合は横断するトラック数が多く、A/Dコンバータ53でエンベロープを取り込むことが困難なため、カウント値が所定値以上、例えば、100以上の場合は、偏芯粗検出処理により、トラックカウンタ49の値に基づいて大まかな偏芯の方向を求める偏芯粗検出処理に進む。この偏芯粗検出処理は、磁気ヘッド23を追従させながら検出する追従検出処理である。
【0025】
アクチュエータ25が静止した状態で一周に渡り測定したトラックカウンタ49のカウント値により、偏芯量のおよその値が分かる。例えば、カウント値が8の場合は、カウント値8の四分の一、つまり2本のトラックピッチ分がおよその偏芯量となる。そこで、その偏芯量に基づいた偏芯量、例えば半分に相当する量の偏芯量をアクチュエータ制御の目標値に設定する(ステップS21)。アクチュエータ制御器37には、アクチュエータ25に取り付けられたエンコーダ31の出力値を参照させて、偏芯が重畳された目標値に対して追従させる。
【0026】
十分な精度で偏芯目標値に追従させるためには、エンコーダ31の出力をサンプリングするタイミングがスピンドルモータ21の回転に同期していなければならない。そこで、一周に渡る偏芯の方向を360゜/n以下(但し、n≧2の整数)、つまり、180゜以下、例えば30゜刻みで設定する(ステップS23)。設定した偏芯方向および測定した偏芯量の半分からなる目標値に基づいてアクチュエータ25を追従制御させながら(ステップS23)、一周分のカウント値を各角度について測定する(ステップS25)。以上のカウント処理を、360゜分繰り返す(ステップS27:N、ステップS21)。
【0027】
以上のトラックパルス数のカウント処理によれば、実際の偏芯方向に近い角度におけるカウント値が他の角度におけるカウント値に比べて小さくなる。そこで、360゜分のカウント処理が終了すると(ステップS27、Y)、取得した測定値に基づいて偏芯の方向を絞り込み、例えば最小のカウント値を選択し(ステップS29)、新たな偏芯量に相当するトラックパルス数以下、例えば、半数分に相当する量の偏芯をアクチュエータ制御の目標値に加えて、ステップS17に戻る。
【0028】
以上のステップS17乃至S29の処理を繰り返すと、アクチュエータ制御の目標値が徐々にDTM10の偏芯の量と方向に近づく。このようにしてトラックパルスのカウント値が十分に小さくなると、エンベロープ波形の周波数が低くなるので、A/Dコンバータ53によってエンベロープ波形の取り込みが可能になり、以降の偏芯量が少ない場合の偏芯精密検出処理に引き継ぐことができる。つまり、カウント値が所定値以上でなくなったら(ステップS15:N)、偏芯精密検出処理に進む。この実施形態では、カウント値が100未満まで絞り込めた後に、エンベロープ波形の取り込みに移行する。
なお、この実施形態では一周を等分割して各角度を偏芯方向と設定してトラック数をカウントしたが、ステップS15における一周分のカウント値の出力タイミングからおよその偏芯方向が分かっているので、その偏芯方向を含む所定範囲に絞って横断するトラック数のカウントを実施してもよい。
【0029】
「偏芯量が少ない場合」
カウント値が所定値以上でない場合(ステップS17:N)、つまり偏芯量が少なく、アクチュエータ制御器37が偏芯に追従できるほど偏芯量が絞り込まれると、偏芯精密検出処理に進む。偏芯精密検出処理では、A/Dコンバータ53によりエンベロープ波形を取り込み、エンベロープ波形から偏芯量と偏芯の方向、およびトラックオフセット値を直接算出する。偏芯量が少ない場合の偏芯精密検出処理を、図11に示したフローチャートを参照して説明する。
【0030】
磁気ヘッド23によりDTM10の記録トラック13をリードし、A/D変換して得たエンベロープ波形の振幅の変化をf(x)として得る(ステップS101)。変数xは磁気ヘッド23の半径方向の位置を表していて、整数部がトラック番号、小数部はトラック中心からのオフセットを示している。このようにして得た振幅f(x)は、図7に示したようなプロファイルを示す。図7において、縦軸は振幅、横軸は半径方向位置を示している。なお、偏芯量が少な過ぎて有効な振幅変化が得られない場合には最大、最小振幅を一周で捕らえるのに十分な偏芯量、例えばトラックピッチの数倍程度の偏芯を与える。
【0031】
偏芯は一周に渡る正弦波のトラックずれなので、
偏芯量をa、
偏芯の方向をθ、
トラック中心からのオフセットをε、
として、一周に渡るエンベロープ波形yを下記(式1)に示した関数として表すことができる。
y(t,a,θ,ε)=f(a cos(2πt+θ)+ε) ・・・(式1)
但し、0≦t≦k
kは周回を表している。
【0032】
ここで、(式1)により表されるエンベロープ波形と、A/D変換された実エンベロープ波形のデータをベクトルと考えると、それぞれ正規化してから内積を演算し、この内積値を最大化するパラメータa、θ、εの組を求めるとその組の各値がそのときの偏芯量、偏芯の方向およびトラックオフセットを表している。そこで本実施形態では、この内積値を最大化するパラメータa、θ、εの組をサーチする。
【0033】
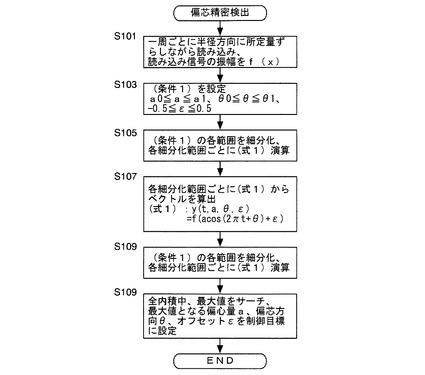
ここで、パラメータaとθは、前述の偏芯粗検出処理においてカウントしたトラックパルスによりおおよその値が求められているので、各パラメータa、θ、εの範囲を事前に、下記(条件1)のように絞り込む(ステップS103)。
(条件1) a0≦a≦a1、θ0≦θ≦θ1、-0.5≦ε≦0.5
ここで、範囲[a0,a1]、[θ0,θ1]は、事前に絞り込まれた範囲である。なお、トラックオフセットεはもう少し範囲を拡げ、例えば-1≦ε≦1としてもよい。
【0034】
以上の(条件1)の範囲をそれぞれ細分化し、例えば100分割して、細分化したパラメータ値毎に(式1)からデータのベクトルを算出し(ステップS105)、全体のノルムで割ることで正規化する(ステップS107)。その後同様に全値から求めたノルムで正規化した実エンベロープのサンプリングデータのベクトルとの内積をとる(ステップS109)。
【0035】
これを(条件1)の全範囲に渡って実行する。このようにして求めた内積を最大にするパラメータの組が、求めるパラメータa、θ、εの推定値となるので、その偏芯量a、偏芯方向θ、オフセットεを制御目標に設定し(ステップS111)、トラック偏芯検出処理を終了する。
【0036】
「有効性の検証」
以上の本発明のDTMトラック偏芯検出方法の有効性を実証するために、
f(x)=0.5cos(x)+0.5
としたときのシミュレーション結果について説明する。この実証例では、偏芯の振幅の最大値から最大値までの振幅値aを3.3、偏芯の方向θを0.2π、トラックオフセットを0.1として、10周に渡ってエンベロープ波形を取得する。すなわちエンベロープ波形は、次の(式2)によって表すことができる。
0.5cos(3.3πcos(2πt+0.2π)+0.1π)+0.5 ・・・(式2)
ただし、t:(0,10)
【0037】
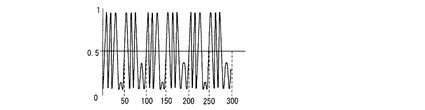
ここで、10周のうち、3周分(t:(0,3))を図8にグラフとして示した。ただし、一周当たりのサンプル数は100個である。
【0038】
式(2)より、100(サンプル/周)×10周=1000サンプルのデータ列を得られる。これをベクトルLとし、ベクトルLのノルム(各要素の自乗和の平方根(自乗平均平方根:Root Mean Square (RMS))をとり、絶対値|L|とする。
【0039】
一方、偏芯量が多い場合のトラック偏芯粗検出処理により得たトラック横断パルス状況から、偏芯の量はほぼ3トラック前後、すなわち3-1=2から、3+1=4トラックの間にあると推定できる。また、同様にトラック偏芯粗検出処理からθが0〜π/6であると推定できる。トラックオフセットεについては情報がないので、その範囲を前述のように-0.5から0.5の間に設定する。
【0040】
(式1)において、tを0.01ステップで0から10まで変化させながら測定し、下記の(式3)からなるベクトルm(a,θ,ε)を作る。
m(a,θ,ε)={y(0,a,θ,ε)、y(0.01,a,θ,ε)、・・・y(9.99,a,θ,ε)、y(10,a,θ,ε)} ・・・(式3)
そうして偏芯量aを2から4まで0.01ステップで、偏芯方向θを0からπ/6まで1゜刻みで、トラックオフセットεを-1から1まで0.01ステップで変化させて全ての組についてノルム|m(a,θ,ε)|を求め、下記(式4)を演算する。
P(a,θ,ε)=Lm(a,θ,ε)/{|L||m(a,θ,ε)|} ・・・(式4)
(式4)において、P(a,θ,ε)が最大値をとるときのa、θ、εの値が、推定値となる。
【0041】
以上の様子を図9(A)乃至(C)に三次元グラフ化して示した。ここでは理解を容易にする視覚化のために、上記の(条件1)に若干の幅を加え、偏芯量aを1から5、εを-1から1に変化させたときのP(a,θ,ε)を、偏芯方向θを0.1、0.2、0.3と変化させてそれぞれプロットしてある。
【0042】
以上の結果から、(a,θ,ε)=(3.3,0.2,0.1)のときに最大値1をとる大きな山があり、パラメータは元の偏芯の各値と一致することが分かる。
また、この最大値以外の点では、
P(a,θ,ε)<0.5
満足しており、推定値として十分なSNが得られている。
【0043】
以上の通りDTMのトラック偏芯検出方法および検出装置の実施形態によれば、偏芯量が複数のトラックピッチ以上あっても、磁気ヘッドの読み出し信号から磁気ヘッドがトラックを横断する数、そのタイミングを検出しておおよその偏芯量、偏芯方向およびトラックオフセットを検出することができるので、サーボパターンが書き込まれる前のDTMについて偏芯量、偏芯方向およびトラックオフセットを検出し、磁気ヘッドを追従制御させることが可能になる。さらに磁気ヘッドを追従制御させることが可能になると、追従制御させながら読み出して読み出し信号のエンベロープを検出して、精密な偏芯量、偏芯方向およびトラックオフセットを検出することが可能になるので、検出した偏芯量、偏芯方向およびトラックオフセットを設定することができる。このように本実施形態によれば、トラックピッチが非常に狭いDTMであっても、サーボパターンを書き込む前に偏芯量、偏芯方向およびトラックオフセットを検出して、磁気ヘッドを追従制御させることができる。
【図面の簡単な説明】
【0044】
【図1】本発明の偏芯検出装置および偏芯検出方法により偏芯を検出するディスクリートトラックメディア(DTM)の基本構造の概要を示す図である。
【図2】偏芯したDTMの記録トラックと磁気ヘッドの移動軌跡との関係を示す図である。
【図3】本発明にかかるトラック偏芯検出装置の実施形態の主要回路構成をブロックで示す図である。
【図4】同トラック偏芯検出装置に含まれるトラック/振幅波形検出器の主要回路構成をブロックで示す図である。
【図5】磁気ヘッドを静止させて読み込んだデータ信号の振幅の時間変化をグラフで示す図である。
【図6】トラック偏芯検出装置のエンベロープ回路により検出されたエンベロープ波形とトラックカウンタから出力されるトラックパルスの関係をグラフで示す図である。
【図7】磁気ヘッドによる読み出し信号の振幅とトラック位置との関係をグラフで示す図である。
【図8】シミュレーションによる3周分の振幅の時間変化をグラフで示す図である。
【図9】シミュレーションによる偏芯の量、偏芯の方向およびトラックオフセットを三次元グラフによって示す図である。
【図10】本発明のトラック偏芯検出装置の動作である偏芯粗検出方法をフローチャートで示す図である。
【図11】本発明のトラック偏芯検出装置の動作である偏芯精密検出方法をフローチャートで示す図である。
【符号の説明】
【0045】
10 DTM
11 基板
13 記録トラック
14 磁性層
15 溝
17 磁気ヘッドの移動軌跡
21 スピンドルモータ
23 磁気ヘッド
25 アクチュエータ
27 プリアンプ
29 トラック/振幅波形検出器
31 エンコーダ
33 サンプリングタイミング発生器
35 CPU(検出手段)
37 アクチュエータ制御回路
41 エンベロープ回路
43 ピーク保持回路
45 しきい値設定回路
47 コンパレータ
49 トラックカウンタ
51 トグルフリップフロップ
53 A/Dコンバータ
【特許請求の範囲】
【請求項1】
磁性体が存在するトラックと磁性材が存在しない溝を有するディスクリートトラックメディア(以下「DTM」という)のトラック中心とスピンドルモータの回転中心の偏芯を検出する偏芯検出方法であって、
前記DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、
前記所定領域に静止させたヘッドによって前記所定領域に書き込んだデータを読み出す段階と、
前記読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出して偏芯量および偏芯方向を検出する静止検出段階と、を含むことを特徴とするディスクリートメディアの偏芯検出方法。
【請求項2】
請求項1記載のディスクリートメディアの偏芯検出方法において、前記粗検出段階ではさらに、トラックオフセットも検出するディスクリートメディアの偏芯検出方法。
【請求項3】
請求項1または2記載のディスクリートメディアの偏芯検出方法はさらに、前記検出段階の後に、前記静止させたヘッドで検出した偏芯量の所定分の一の偏芯量および偏芯方向を複数方向に設定して追従目標値として設定する段階と、
該追従目標値に基づいて前記ヘッドを追従させながら読み出す段階と、
該追従させながら読み出した読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出する追従検出段階と、
前記追従検出段階で得られた最小回数を選択し、そのときの偏心量の所定分の一の偏心量を前記追従段階で設定した偏心量に加算して前記追従検出段階の再実行を複数回繰り返す段階とを含むディスクリートメディアの偏芯検出方法。
【請求項4】
請求項3記載のディスクリートメディアの偏芯検出方法において、前記繰り返し段階は、前記最小回数が所定値未満になるまで繰り返すディスクリートメディアの偏芯検出方法。
【請求項5】
請求項1乃至請求項4記載のディスクリートメディアの偏芯検出方法によって検出した偏芯量、偏芯方向およびトラックオフセットに基づいてヘッドを追従制御させながら前記トラックの前記所定領域からデータを読み出す読み出し段階と、
該読み出し信号のエンベロープ波形から偏芯量および偏芯方向を検出する精密検出段階と、を含むことを特徴とするディスクリートメディアの偏芯検出方法。
【請求項6】
請求項5記載のディスクリートメディアの偏芯検出方法において、偏芯量をa、偏芯の方向をθ、トラック中心からのオフセットをεとしたときに、一周に渡るエンベロープ波形を下記式1によって表し、
y(t,a,θ,ε)=f(a cos(2πt+θ)+ε) ・・・(式1)
但し、0≦t≦k
kは周回
さらに式1で表されるエンベロープ波形および前記読み出し信号による実エンベロープ波形のデータを正規化してから内積を演算し、この内積値を最大化するパラメータa、θ、εの組を求めて、その組の各値を前記DTMの偏芯量、偏芯方向およびトラックオフセットとするディスクリートメディアの偏芯検出方法。
【請求項7】
請求項6記載のディスクリートメディアの偏芯検出方法において、前記パラメータa、θ、εの値を前記粗検出処理によって求めた値に基づいて複数の範囲に細分化し、各細分化した値ごとに前記(式1)からベクトルを算出し、全体のノルムで割って正規化する段階と、
正規化した実エンベロープのサンプリングデータのベクトルとの内積をとる段階と、
前記正規化する段階を前記全範囲に渡って実行する段階を含むディスクリートメディアの偏芯検出方法。
【請求項8】
磁性体が存在するトラックと磁性材が存在しない溝を有するDTMの偏芯測定装置であって、
該DTMが装着されたスピンドルの回転に同期した信号を出力する同期手段と、
前記DTMのトラックにデータを書き込み、書き込まれたデータを読み出すヘッドと、
前記同期手段の出力に基づいて、前記DTMが1回転する間に前記ヘッドが読み出した読み出し信号の振幅を検出して磁性体が存在するトラック上と磁性体が存在しない溝をそれぞれヘッドが横切った回数を検出する横断検出手段と、
前記読み出し信号の振幅を検出する振幅検出手段と、
該振幅検出手段が検出した振幅の変化から偏芯量、偏芯方向およびトラック中心からのオフセットを算出する演算手段と、
前記算出した偏芯の大きさ、方向およびオフセットに基づいて前記ヘッドを追従させるアクチュエータ制御手段と、
前記アクチュエータ制御手段により追従制御しながら前記ヘッドで読み出した読み出し信号のエンベロープ波形を取り込み、該エンベロープ波形から偏芯方向、偏芯方向およびトラックオフセットを検出する検出手段と、を備えたことを特徴とする偏芯検出装置。
【請求項1】
磁性体が存在するトラックと磁性材が存在しない溝を有するディスクリートトラックメディア(以下「DTM」という)のトラック中心とスピンドルモータの回転中心の偏芯を検出する偏芯検出方法であって、
前記DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、
前記所定領域に静止させたヘッドによって前記所定領域に書き込んだデータを読み出す段階と、
前記読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出して偏芯量および偏芯方向を検出する静止検出段階と、を含むことを特徴とするディスクリートメディアの偏芯検出方法。
【請求項2】
請求項1記載のディスクリートメディアの偏芯検出方法において、前記粗検出段階ではさらに、トラックオフセットも検出するディスクリートメディアの偏芯検出方法。
【請求項3】
請求項1または2記載のディスクリートメディアの偏芯検出方法はさらに、前記検出段階の後に、前記静止させたヘッドで検出した偏芯量の所定分の一の偏芯量および偏芯方向を複数方向に設定して追従目標値として設定する段階と、
該追従目標値に基づいて前記ヘッドを追従させながら読み出す段階と、
該追従させながら読み出した読み出し信号に基づき、前記DTMが所定量回転する間に前記ヘッドが前記トラックを横切る回数およびそのタイミングを検出する追従検出段階と、
前記追従検出段階で得られた最小回数を選択し、そのときの偏心量の所定分の一の偏心量を前記追従段階で設定した偏心量に加算して前記追従検出段階の再実行を複数回繰り返す段階とを含むディスクリートメディアの偏芯検出方法。
【請求項4】
請求項3記載のディスクリートメディアの偏芯検出方法において、前記繰り返し段階は、前記最小回数が所定値未満になるまで繰り返すディスクリートメディアの偏芯検出方法。
【請求項5】
請求項1乃至請求項4記載のディスクリートメディアの偏芯検出方法によって検出した偏芯量、偏芯方向およびトラックオフセットに基づいてヘッドを追従制御させながら前記トラックの前記所定領域からデータを読み出す読み出し段階と、
該読み出し信号のエンベロープ波形から偏芯量および偏芯方向を検出する精密検出段階と、を含むことを特徴とするディスクリートメディアの偏芯検出方法。
【請求項6】
請求項5記載のディスクリートメディアの偏芯検出方法において、偏芯量をa、偏芯の方向をθ、トラック中心からのオフセットをεとしたときに、一周に渡るエンベロープ波形を下記式1によって表し、
y(t,a,θ,ε)=f(a cos(2πt+θ)+ε) ・・・(式1)
但し、0≦t≦k
kは周回
さらに式1で表されるエンベロープ波形および前記読み出し信号による実エンベロープ波形のデータを正規化してから内積を演算し、この内積値を最大化するパラメータa、θ、εの組を求めて、その組の各値を前記DTMの偏芯量、偏芯方向およびトラックオフセットとするディスクリートメディアの偏芯検出方法。
【請求項7】
請求項6記載のディスクリートメディアの偏芯検出方法において、前記パラメータa、θ、εの値を前記粗検出処理によって求めた値に基づいて複数の範囲に細分化し、各細分化した値ごとに前記(式1)からベクトルを算出し、全体のノルムで割って正規化する段階と、
正規化した実エンベロープのサンプリングデータのベクトルとの内積をとる段階と、
前記正規化する段階を前記全範囲に渡って実行する段階を含むディスクリートメディアの偏芯検出方法。
【請求項8】
磁性体が存在するトラックと磁性材が存在しない溝を有するDTMの偏芯測定装置であって、
該DTMが装着されたスピンドルの回転に同期した信号を出力する同期手段と、
前記DTMのトラックにデータを書き込み、書き込まれたデータを読み出すヘッドと、
前記同期手段の出力に基づいて、前記DTMが1回転する間に前記ヘッドが読み出した読み出し信号の振幅を検出して磁性体が存在するトラック上と磁性体が存在しない溝をそれぞれヘッドが横切った回数を検出する横断検出手段と、
前記読み出し信号の振幅を検出する振幅検出手段と、
該振幅検出手段が検出した振幅の変化から偏芯量、偏芯方向およびトラック中心からのオフセットを算出する演算手段と、
前記算出した偏芯の大きさ、方向およびオフセットに基づいて前記ヘッドを追従させるアクチュエータ制御手段と、
前記アクチュエータ制御手段により追従制御しながら前記ヘッドで読み出した読み出し信号のエンベロープ波形を取り込み、該エンベロープ波形から偏芯方向、偏芯方向およびトラックオフセットを検出する検出手段と、を備えたことを特徴とする偏芯検出装置。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】

【図7】

【図8】
【図9】

【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−210451(P2008−210451A)
【公開日】平成20年9月11日(2008.9.11)
【国際特許分類】
【出願番号】特願2007−45922(P2007−45922)
【出願日】平成19年2月26日(2007.2.26)
【出願人】(593191350)株式会社アイメス (17)
【Fターム(参考)】
【公開日】平成20年9月11日(2008.9.11)
【国際特許分類】
【出願日】平成19年2月26日(2007.2.26)
【出願人】(593191350)株式会社アイメス (17)
【Fターム(参考)】
[ Back to top ]