
ディスク再生装置
【課題】光ディスクをクランプ又はアンクランプするときに生じる、光ピックアップのホルダとベース部との衝突による叩き音を抑えること。
【解決手段】対物レンズを保持するホルダと、ホルダをフォーカス軸方向に変位させるアクチュエータと、ホルダを支持するベース部とを有する光ピックアップと、アクチュエータの駆動を制御する駆動制御部とを備えるディスク再生装置であって、光ディスクがクランプ又はアンクランプされるとき、駆動制御部が、光ディスクから遠ざかる方向へホルダを変位させるようアクチュエータの駆動を制御し、ホルダの底部をベース部に当接させる。
【解決手段】対物レンズを保持するホルダと、ホルダをフォーカス軸方向に変位させるアクチュエータと、ホルダを支持するベース部とを有する光ピックアップと、アクチュエータの駆動を制御する駆動制御部とを備えるディスク再生装置であって、光ディスクがクランプ又はアンクランプされるとき、駆動制御部が、光ディスクから遠ざかる方向へホルダを変位させるようアクチュエータの駆動を制御し、ホルダの底部をベース部に当接させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はディスク再生装置に関し、さらに詳しくは、光ディスクをクランプ又はアンクランプするときに生じる動作音が小さいディスク再生装置に関する。
【背景技術】
【0002】
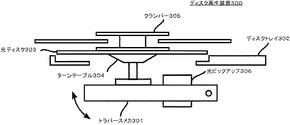
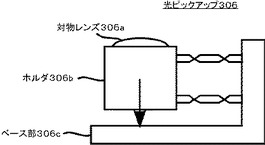
一般にディスク再生装置300は、図7に示すように、光ピックアップ306が搭載されたトラバースメカ301がカム機構(図示せず)によって持ち上げられて、ディスクトレイ302に積載されている光ディスク303をターンテーブル304上に載せ、クランパー305が磁力によってターンテーブル304を吸着することで、光ディスク303がクランプされる構造になっている。しかし、光ディスクをクランプ又はアンクランプするときに動作音が生じ、ユーザにとって非常に不愉快である。この動作音の要因のひとつに、光ピックアップ306の構造によるものが挙げられる。具体的には、図8に示すように、光ピックアップ306では、ディスク再生時に直ちにディスク記録面へレンズ焦点を合わせるために、対物レンズ306aが可動範囲(光ディスク面に対して垂直方向)の所定位置に配置されており、宙に浮いた状態である。一方、ターンテーブル304がクランパー305の磁力によって吸着されるため、吸着される瞬間と離れる瞬間に衝撃が生じる。その衝撃が光ピックアップ306に伝わり、対物レンズ306aを保持するホルダ306bが、図8中の矢印の方向へ動いてしまい、光ピックアップ306のベース部材306cに衝突してしまうことで、叩き音が発生するという問題がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−362675号
【特許文献2】特開2005−100633号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は上記従来の課題を解決するためになされたものであり、その目的とするところは、光ディスクをクランプ又はアンクランプするときに生じる動作音が小さいディスク再生装置を提供することである。
【課題を解決するための手段】
【0005】
本発明の好ましい実施形態によるディスク再生装置は、対物レンズを保持するホルダと、該ホルダをフォーカス軸方向に変位させるアクチュエータと、該ホルダを支持するベース部とを有する光ピックアップと、該アクチュエータの駆動を制御する駆動制御部とを備えるディスク再生装置であって、光ディスクがクランプ又はアンクランプされるとき、該駆動制御部が、該光ディスクから遠ざかる方向へ該ホルダを変位させるよう該アクチュエータの駆動を制御し、該ホルダの底部を該ベース部に当接させる。
【0006】
光ディスクがクランプ又はアンクランプされるとき、駆動制御部は光ディスクからフォーカス軸方向に遠ざかる方向へホルダを変位させ、ホルダの底部をベース部に当接させる。これにより、光ディスクがクランプ又はアンクランプされるときに生じる衝撃が光ピックアップに伝わっても、ホルダとベース部との衝突を防ぎ、叩き音を抑えることができる。
【0007】
好ましい実施形態においては、上記光ディスクを積載するディスクトレイを有し、該ディスクトレイを搬入及び搬出するディスクローディング部をさらに備え;該駆動制御部が、搬入又は搬出の指示信号が入力されたとき、該光ディスクから遠ざかる方向へ上記ホルダを変位させるよう上記アクチュエータの駆動を制御して、該ホルダの底部を上記ベース部に当接させるとともに、該ディスクローディング部に該ディスクトレイの搬入又は搬出を開始させ、該ディスクトレイの搬入又は搬出が完了したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する。
【0008】
駆動制御部は、ディスクトレイの搬入又は搬出の開始から完了まで、光ディスクからフォーカス軸方向に遠ざかる方向へホルダを変位させ、ホルダの底部をベース部に当接させる。これにより、ディスクトレイの搬入又は搬出に連動して光ディスクがクランプ又はアンクランプされる場合に、ディスクトレイの搬入又は搬出に合わせてホルダの底部がベース部に当接され、光ディスクがクランプ又はアンクランプのときのホルダとベース部との衝突による叩き音を抑えることができる。
【0009】
好ましい実施形態においては、上記駆動制御部が、搬入又は搬出の指示信号が入力されたとき、計時を開始し、上記光ディスクから遠ざかる方向へ上記ホルダを変位させるよう上記アクチュエータの駆動を制御して、該ホルダの底部を上記ベース部に当接させ、計時開始から所定時間が経過したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する。
【0010】
駆動制御部は、入力部から搬入又は搬出の指示信号が入力されたとき、計時を開始し、光ディスクから遠ざかる方向へホルダを変位するようアクチュエータの駆動を制御して、ホルダの底部をベース部に当接させる。計時する所定時間として、計時開始からクランプ又はアンクランプが完了するまでに必要な時間を設定すれば、ディスクトレイの搬入又は搬出動作中に光ディスクのクランプ又はアンクランプが完了しない場合であっても、光ディスクがクランプ又はアンクランプされるときにホルダの底部がベース部に当接されているので、叩き音の発生を抑えることができる。
【発明の効果】
【0011】
本発明のディスク再生装置は、光ディスクがクランプ又はアンクランプされるとき、光ディスクからフォーカス軸方向に遠ざかる方向へホルダを変位させ、ホルダの底部をベース部に当接させることで、ホルダとベース部の衝突による叩き音を抑えることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の好ましい実施形態によるディスク再生装置を示すブロック図である。
【図2】本発明の好ましい実施形態における光ピックアップの構造を示す側面図である。
【図3】ディスクトレイの搬入が指示されたときのマイクロコンピュータの処理を示すフローチャートである。
【図4】クランプ又はアンクランプ中におけるホルダの位置を示す、光ピックアップの側面図である。
【図5】ディスクトレイの搬出が指示されたときのマイクロコンピュータの処理を示すフローチャートである。
【図6】ディスクトレイの搬入又は搬出が指示されたときのマイクロコンピュータの処理を示すフローチャートである。
【図7】従来のディスク再生装置を示す側面図である。
【図8】従来の光ピックアップの構造を示す側面図である。
【発明を実施するための形態】
【0013】
以下、本発明の好ましい実施形態によるディスク再生装置100について、図を参照して説明するが、本発明はこれらの実施形態には限定されない。なお、図中同一又は相当部分には同一符号を付してその説明を援用する。
【0014】
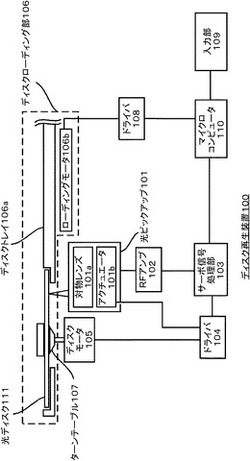
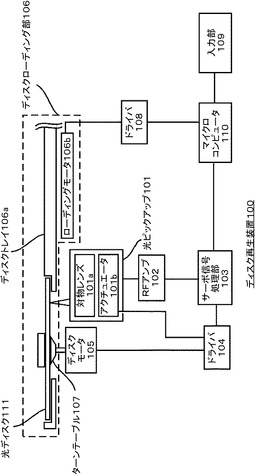
図1は、本発明の好ましい実施形態によるディスク再生装置100を示すブロック図である。図2は、光ピックアップ101の構造を示す側面図である。ディスク再生装置100は、CD、DVD、BDといった光ディスク111が再生可能な装置であり、図1に示すように光ピックアップ101と、RFアンプ102と、サーボ信号処理部103と、ドライバ104と、ディスクモータ105と、ディスクローディング部106と、ターンテーブル107と、ドライバ108と、入力部109と、マイクロコンピュータ110とを備える。
【0015】
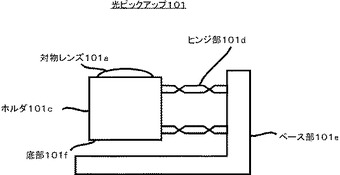
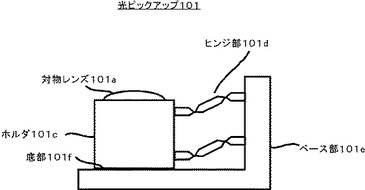
光ピックアップ101は、光ディスク111へレーザ光を照射し、光ディスク111で反射された反射光から、映像や音楽などを含むRF信号やフォーカスエラー信号などを生成し、RFアンプ102へ出力する。光ピックアップ101は、光ディスク111へレーザ光を照射するための対物レンズ101aと、対物レンズ101aをフォーカス軸方向(光ディスク面に対して垂直方向)に駆動するアクチュエータ101bとを備える。また、図2で示すように、光ピックアップ101は対物レンズ101aを保持するホルダ101cを有する。ホルダ101cがアクチュエータ101bによって駆動されることによって、対物レンズ101aはフォーカス軸方向に駆動される。なお、ホルダ101cはヒンジ部101dを介してベース部101eに接続される。
【0016】
RFアンプ102は、光ピックアップ101から入力される信号を所定の値に増幅し、サーボ信号処理部103へ出力する。
【0017】
サーボ信号処理部103は、RFアンプ102から入力されるフォーカスエラー信号や、後述するマイクロコンピュータ110から入力される制御信号に基づいて、アクチュエータ101bを駆動させる。また、サーボ信号処理部103は、RF信号をアナログ/デジタル変換して音声/映像信号処理部(図示せず)へ出力する。音声/映像信号処理部へ入力された信号は復調や復号が行われ、DAコンバータでデジタル/アナログ変換されて音声/映像信号として出力される。
【0018】
ドライバ104は、サーボ信号処理部103から入力された信号から光ピックアップ101のアクチュエータ101b及びディスクモータ105への駆動信号を生成し出力する。ディスクモータ105は、ディスク再生装置100にセットされた光ディスク111を回転させるためのモータであり、スピンドルモータなどで構成されている。
【0019】
ディスクローディング部106は、光ディスクを積載するディスクトレイ106aとローディングモータ106bとを有し、ローディングモータ106bによってディスクトレイ106aをディスク再生装置100へ搬入又は搬出する。光ディスク111は、このディスクローディング部106によるディスクトレイ106aの搬入と連動してターンテーブル107とクランパー(図示せず)とでクランプされ、ディスクトレイ106aの搬出と連動してアンクランプされる。
【0020】
ドライバ108は、マイクロコンピュータ110から入力された信号からローディングモータ106aへの駆動信号を生成し出力する。
【0021】
入力部109は、ユーザからの指示を受け付け、ディスクトレイ106aの搬入又は搬出の指示があった場合に、指示信号をマイクロコンピュータ110へ出力する。この指示信号は、搬入及び搬出共通の信号であっても、それぞれ別の信号であってもよい。
【0022】
マイクロコンピュータ110は、入力部109から指示信号が入力されると、ドライバ108へ制御信号を出力し、ローディングモータ106bを駆動させてディスクトレイ106aを搬入又は排出させる。また、マイクロコンピュータ110は、光ディスク111がクランプ又はアンプランプされるとき、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bによってホルダ101cの底部101fをベース部101eに当接させる。ここで、光ディスク111がクランプされるときとは、例えば、マイクロコンピュータ110がローディングモータ106bを駆動させているときである。なぜなら、本実施例においては、ディスクトレイ106aの搬入又は搬出と連動して光ディスク111がクランプ又はアンクランプされるからである。さらに、マイクロコンピュータ110は、クランプ又はアンクランプ動作中でない場合、ディスク再生時に直ちにディスク記録面へレンズ焦点を合わせるために、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bによって光ピックアップ101を基準位置に配置させる。ここで、光ディスク111のクランプ/アンクランプ動作中でない場合とは、本実施例では、マイクロコンピュータ110がローディングモータ106bを駆動させていないときである。
【0023】
なお、本実施例において、マイクロコンピュータ110、サーボ信号処理部103、ドライバ104及びドライバ108が、アクチュエータ101b又はローディングモータ106bの駆動を制御する駆動制御部として働き、駆動制御部は、搬入又は搬出の指示信号が入力されたとき、光ディスク111から遠ざかる方向へホルダ101cを変位させるようアクチュエータ101bの駆動を制御して、ホルダ101cの底部101fをベース部101eに当接させるとともに、ローディングモータ106bの駆動を制御して、ディスクローディング部106にディスクトレイ106aの搬入又は搬出を開始させる。また、駆動制御部は、ディスクトレイ106aの搬入又は搬出が完了したとき、ホルダ101cが基準位置へ配置されるようアクチュエータ101bの駆動を制御する。
【0024】
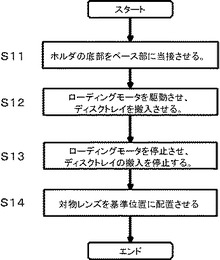
次に、本発明の好ましい実施形態によるディスク再生装置100の動作について説明する。図3は、ディスクトレイ106aの搬入が指示されたときのマイクロコンピュータ110の処理を示すフローチャートである。図4は、クランプ又はアンクランプ動作中におけるホルダ101cの位置状態を示す、光ピックアップ101の側面図である。図5は、ディスクトレイ106aの搬出が指示されたときのマイクロコンピュータ110の処理を示すフローチャートである。
【0025】
まず、ディスクトレイ106aが搬入されるときのマイクロコンピュータ110の処理について説明する。入力部109からディスクトレイ106a搬入の指示信号が入力されると、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、アクチュエータ101bを駆動させて、図4に示すように、ホルダ101cを光ディスク111からフォーカス軸方向に遠ざけて底部101fをベース部101eに当接させる(S11)。そして、マイクロコンピュータ110は、制御信号をローディングモータ106bへ出力し、ローディングモータ106bを駆動させて、ディスクトレイ106aをディスク再生装置100へ搬入させる(S12)。このとき、ディスクトレイ106aの搬入動作に連動して光ディスク111がクランプされるので、クランプによって生じる衝撃が光ピックアップ101に伝わる。しかし、ホルダ101cがすでにベース部101eに当接されているため、ホルダ2bとベース部101eとの衝突による叩き音を抑えることができる。次に、マイクロコンピュータ110は、ディスクトレイ106aがディスク再生装置100へ完全に搬入されると、ローディングモータ106bを停止させ、ディスクトレイ106aの搬入を完了する(S13)。そして、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、図2で示すように、対物レンズ101aが基準位置に配置されるよう、アクチュエータ101bを駆動させる(S14)。
【0026】
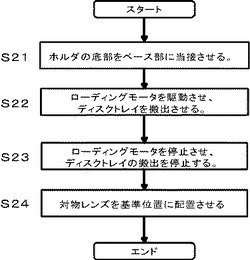
次に、ディスクトレイ106aが搬出されるときのマイクロコンピュータ110の処理について説明する。入力部109からディスクトレイ106a搬出の指示信号が入力されると、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、アクチュエータ101bを駆動させて、図4に示すように、ホルダ101cを光ディスク111からフォーカス軸方向に遠ざけて底部101fをベース部101eに当接させる(S21)。そして、マイクロコンピュータ110は、制御信号をローディングモータ106bへ出力し、ローディングモータ106bを駆動させて、ディスクトレイ106aをディスク再生装置100から搬出させる(S22)。このとき、ディスクトレイ106aの搬出動作に連動して光ディスク111がアンクランプされるので、アンクランプによって生じる衝撃が光ピックアップ101に伝わる。しかし、ホルダ101cがすでにベース部101eに当接されているため、ホルダ2bとベース部101eとの衝突による叩き音を抑えることができる。次に、マイクロコンピュータ110は、ディスクトレイ106aがディスク再生装置100から完全に搬出されると、ローディングモータ106bを停止させ、ディスクトレイ106aの搬出を完了する(S23)。そして、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、図2で示すように、対物レンズ101aが基準位置に配置されるよう、アクチュエータ101bを駆動させる(S24)。
【0027】
次に、本発明の別の好ましい実施形態によるディスク再生装置200について説明する。上述のディスク再生装置100と同一部分については、その説明を省略または簡略する。ディスク再生装置200では、入力部109からディスクトレイ106aの搬入又は搬出の指示信号が入力されると、マイクロコンピュータ110が計時を開始する。そして、マイクロコンピュータ110は、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bを駆動させて、所定時間が経過するまで、ホルダ101cの底部101fをベース部101eに当接させる。所定時間が経過すれば、マイクロコンピュータ110は、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bを駆動させて、対物レンズ101aを基準位置に配置させる。
【0028】
次に、本発明の別の好ましい実施形態によるディスク再生装置200の動作について説明する。図6は、ディスクトレイ106aの搬入又は搬出が指示されたときのマイクロコンピュータ110の処理を示すフローチャートである。
【0029】
マイクロコンピュータ110は、入力部109からディスクトレイ106aの搬入又は搬出の指示信号が入力されると、制御信号をサーボ信号処理部103へ出力し、アクチュエータ101bを駆動させて、図4に示すように、ホルダ101cを光ディスク111からフォーカス軸方向に遠ざけて底部101fをベース部101eに当接させる(S31)。そして、マイクロコンピュータ110は、計時を開始する(S32)。次に、マイクロコンピュータ110は、制御信号をローディングモータ106bへ出力し、ローディングモータ106bを駆動させ、ディスクトレイ106aを搬入又は排出させる(S33)。次に、マイクロコンピュータ110は、所定時間が経過したか否かを判断する(S34)。ここでいう所定時間とは、計時開始からクランプ又はアンクランプが完了するまでに必要な充分な時間である。ステップ34で所定時間が経過したと判断した場合(S34:YES)、マイクロコンピュータ110は、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bを駆動させて、対物レンズ101aを基準位置に配置させる(S14)。光ディスク111がクランプ又はアンプランプされる間、ホルダ101cがベース部101eに当接されているため、ホルダ2bとベース部101eとの衝突による叩き音を抑えることができる。また、ディスクトレイ106aの搬入又は搬出動作期間内に光ディスク111のクランプ又はアンクランプが終了しない場合であっても、計時開始からクランプ又はアンクランプが完了するまでに必要な充分な期間を計時する所定時間として設定しているので、光ディスク111がクランプ又はアンプランプされる間、ホルダ101cがベース部101eに当接され、叩き音の発生を抑えることができる。なお、ステップ34で所定時間が経過していないと判断した場合(S34:NO)、マイクロコンピュータ110は、ステップ33に戻り、計時及びディスクトレイ106aの搬入を継続する。
【0030】
以上、本発明に係るディスク再生装置の好ましい実施形態の例について説明したが、上述した実施の形態は本発明を実施するための例示に過ぎない。例えば、ディスクローディング部106がセンサを有し、このセンサによって、ディスクトレイ106aのローディング動作又はアンローディング動作を検出し、ローディング中又はアンローディング中であることを示す検出信号をマイクロコンピュータ110へ出力するようにしても良い。ここでいうセンサとは、例えば、ディスクトレイ106aの位置に応じてオンオフされる1又は複数の機械的スイッチ又は光学的スイッチである。マイクロコンピュータ110は、入力される検出信号に基づいてローディング中又はアンローディング中を判断し、ローディング中又はアンローディング中である場合に、サーボ信号処理部103に制御信号を出力し、アクチュエータ101bを駆動させて、光ピックアップ101をベース部101eに当接させる。
【0031】
また、本発明の好ましい実施例であるディスク再生装置100において、入力部109からディスクトレイ106aの搬入又は排出の指示信号が入力されてから、ディスクトレイ106aが完全に搬入又は搬出されるまで、底部101fをベース部101eに当接させるようにしたが、その限りではない。例えば、ディスク再生装置100が、クランプ完了又はアンクランプ完了したことを検出してその検出信号をマイクロコンピュータ110へ出力するセンサをさらに有し、マイクロコンピュータ110が、当該センサから検出信号が入力されるまで、底部101fをベース部101eに当接させるようにしても良い。
【産業上の利用可能性】
【0032】
本発明は、ディスク再生装置に好適に採用され得る。
【符号の説明】
【0033】
100 ディスク再生装置
101 光ピックアップ
101a 対物レンズ
101b アクチュエータ
101c ホルダ
101d ベース部
101e 底部
102 RFアンプ
103 サーボ信号処理部
104 ドライバ
105 ディスクモータ
106 ディスクローディング部
106a ディスクトレイ
106b ローディングモータ
107 ターンテーブル
108 ドライバ
109 入力部
110 マイクロコンピュータ
111 光ディスク
【技術分野】
【0001】
本発明はディスク再生装置に関し、さらに詳しくは、光ディスクをクランプ又はアンクランプするときに生じる動作音が小さいディスク再生装置に関する。
【背景技術】
【0002】
一般にディスク再生装置300は、図7に示すように、光ピックアップ306が搭載されたトラバースメカ301がカム機構(図示せず)によって持ち上げられて、ディスクトレイ302に積載されている光ディスク303をターンテーブル304上に載せ、クランパー305が磁力によってターンテーブル304を吸着することで、光ディスク303がクランプされる構造になっている。しかし、光ディスクをクランプ又はアンクランプするときに動作音が生じ、ユーザにとって非常に不愉快である。この動作音の要因のひとつに、光ピックアップ306の構造によるものが挙げられる。具体的には、図8に示すように、光ピックアップ306では、ディスク再生時に直ちにディスク記録面へレンズ焦点を合わせるために、対物レンズ306aが可動範囲(光ディスク面に対して垂直方向)の所定位置に配置されており、宙に浮いた状態である。一方、ターンテーブル304がクランパー305の磁力によって吸着されるため、吸着される瞬間と離れる瞬間に衝撃が生じる。その衝撃が光ピックアップ306に伝わり、対物レンズ306aを保持するホルダ306bが、図8中の矢印の方向へ動いてしまい、光ピックアップ306のベース部材306cに衝突してしまうことで、叩き音が発生するという問題がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−362675号
【特許文献2】特開2005−100633号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は上記従来の課題を解決するためになされたものであり、その目的とするところは、光ディスクをクランプ又はアンクランプするときに生じる動作音が小さいディスク再生装置を提供することである。
【課題を解決するための手段】
【0005】
本発明の好ましい実施形態によるディスク再生装置は、対物レンズを保持するホルダと、該ホルダをフォーカス軸方向に変位させるアクチュエータと、該ホルダを支持するベース部とを有する光ピックアップと、該アクチュエータの駆動を制御する駆動制御部とを備えるディスク再生装置であって、光ディスクがクランプ又はアンクランプされるとき、該駆動制御部が、該光ディスクから遠ざかる方向へ該ホルダを変位させるよう該アクチュエータの駆動を制御し、該ホルダの底部を該ベース部に当接させる。
【0006】
光ディスクがクランプ又はアンクランプされるとき、駆動制御部は光ディスクからフォーカス軸方向に遠ざかる方向へホルダを変位させ、ホルダの底部をベース部に当接させる。これにより、光ディスクがクランプ又はアンクランプされるときに生じる衝撃が光ピックアップに伝わっても、ホルダとベース部との衝突を防ぎ、叩き音を抑えることができる。
【0007】
好ましい実施形態においては、上記光ディスクを積載するディスクトレイを有し、該ディスクトレイを搬入及び搬出するディスクローディング部をさらに備え;該駆動制御部が、搬入又は搬出の指示信号が入力されたとき、該光ディスクから遠ざかる方向へ上記ホルダを変位させるよう上記アクチュエータの駆動を制御して、該ホルダの底部を上記ベース部に当接させるとともに、該ディスクローディング部に該ディスクトレイの搬入又は搬出を開始させ、該ディスクトレイの搬入又は搬出が完了したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する。
【0008】
駆動制御部は、ディスクトレイの搬入又は搬出の開始から完了まで、光ディスクからフォーカス軸方向に遠ざかる方向へホルダを変位させ、ホルダの底部をベース部に当接させる。これにより、ディスクトレイの搬入又は搬出に連動して光ディスクがクランプ又はアンクランプされる場合に、ディスクトレイの搬入又は搬出に合わせてホルダの底部がベース部に当接され、光ディスクがクランプ又はアンクランプのときのホルダとベース部との衝突による叩き音を抑えることができる。
【0009】
好ましい実施形態においては、上記駆動制御部が、搬入又は搬出の指示信号が入力されたとき、計時を開始し、上記光ディスクから遠ざかる方向へ上記ホルダを変位させるよう上記アクチュエータの駆動を制御して、該ホルダの底部を上記ベース部に当接させ、計時開始から所定時間が経過したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する。
【0010】
駆動制御部は、入力部から搬入又は搬出の指示信号が入力されたとき、計時を開始し、光ディスクから遠ざかる方向へホルダを変位するようアクチュエータの駆動を制御して、ホルダの底部をベース部に当接させる。計時する所定時間として、計時開始からクランプ又はアンクランプが完了するまでに必要な時間を設定すれば、ディスクトレイの搬入又は搬出動作中に光ディスクのクランプ又はアンクランプが完了しない場合であっても、光ディスクがクランプ又はアンクランプされるときにホルダの底部がベース部に当接されているので、叩き音の発生を抑えることができる。
【発明の効果】
【0011】
本発明のディスク再生装置は、光ディスクがクランプ又はアンクランプされるとき、光ディスクからフォーカス軸方向に遠ざかる方向へホルダを変位させ、ホルダの底部をベース部に当接させることで、ホルダとベース部の衝突による叩き音を抑えることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の好ましい実施形態によるディスク再生装置を示すブロック図である。
【図2】本発明の好ましい実施形態における光ピックアップの構造を示す側面図である。
【図3】ディスクトレイの搬入が指示されたときのマイクロコンピュータの処理を示すフローチャートである。
【図4】クランプ又はアンクランプ中におけるホルダの位置を示す、光ピックアップの側面図である。
【図5】ディスクトレイの搬出が指示されたときのマイクロコンピュータの処理を示すフローチャートである。
【図6】ディスクトレイの搬入又は搬出が指示されたときのマイクロコンピュータの処理を示すフローチャートである。
【図7】従来のディスク再生装置を示す側面図である。
【図8】従来の光ピックアップの構造を示す側面図である。
【発明を実施するための形態】
【0013】
以下、本発明の好ましい実施形態によるディスク再生装置100について、図を参照して説明するが、本発明はこれらの実施形態には限定されない。なお、図中同一又は相当部分には同一符号を付してその説明を援用する。
【0014】
図1は、本発明の好ましい実施形態によるディスク再生装置100を示すブロック図である。図2は、光ピックアップ101の構造を示す側面図である。ディスク再生装置100は、CD、DVD、BDといった光ディスク111が再生可能な装置であり、図1に示すように光ピックアップ101と、RFアンプ102と、サーボ信号処理部103と、ドライバ104と、ディスクモータ105と、ディスクローディング部106と、ターンテーブル107と、ドライバ108と、入力部109と、マイクロコンピュータ110とを備える。
【0015】
光ピックアップ101は、光ディスク111へレーザ光を照射し、光ディスク111で反射された反射光から、映像や音楽などを含むRF信号やフォーカスエラー信号などを生成し、RFアンプ102へ出力する。光ピックアップ101は、光ディスク111へレーザ光を照射するための対物レンズ101aと、対物レンズ101aをフォーカス軸方向(光ディスク面に対して垂直方向)に駆動するアクチュエータ101bとを備える。また、図2で示すように、光ピックアップ101は対物レンズ101aを保持するホルダ101cを有する。ホルダ101cがアクチュエータ101bによって駆動されることによって、対物レンズ101aはフォーカス軸方向に駆動される。なお、ホルダ101cはヒンジ部101dを介してベース部101eに接続される。
【0016】
RFアンプ102は、光ピックアップ101から入力される信号を所定の値に増幅し、サーボ信号処理部103へ出力する。
【0017】
サーボ信号処理部103は、RFアンプ102から入力されるフォーカスエラー信号や、後述するマイクロコンピュータ110から入力される制御信号に基づいて、アクチュエータ101bを駆動させる。また、サーボ信号処理部103は、RF信号をアナログ/デジタル変換して音声/映像信号処理部(図示せず)へ出力する。音声/映像信号処理部へ入力された信号は復調や復号が行われ、DAコンバータでデジタル/アナログ変換されて音声/映像信号として出力される。
【0018】
ドライバ104は、サーボ信号処理部103から入力された信号から光ピックアップ101のアクチュエータ101b及びディスクモータ105への駆動信号を生成し出力する。ディスクモータ105は、ディスク再生装置100にセットされた光ディスク111を回転させるためのモータであり、スピンドルモータなどで構成されている。
【0019】
ディスクローディング部106は、光ディスクを積載するディスクトレイ106aとローディングモータ106bとを有し、ローディングモータ106bによってディスクトレイ106aをディスク再生装置100へ搬入又は搬出する。光ディスク111は、このディスクローディング部106によるディスクトレイ106aの搬入と連動してターンテーブル107とクランパー(図示せず)とでクランプされ、ディスクトレイ106aの搬出と連動してアンクランプされる。
【0020】
ドライバ108は、マイクロコンピュータ110から入力された信号からローディングモータ106aへの駆動信号を生成し出力する。
【0021】
入力部109は、ユーザからの指示を受け付け、ディスクトレイ106aの搬入又は搬出の指示があった場合に、指示信号をマイクロコンピュータ110へ出力する。この指示信号は、搬入及び搬出共通の信号であっても、それぞれ別の信号であってもよい。
【0022】
マイクロコンピュータ110は、入力部109から指示信号が入力されると、ドライバ108へ制御信号を出力し、ローディングモータ106bを駆動させてディスクトレイ106aを搬入又は排出させる。また、マイクロコンピュータ110は、光ディスク111がクランプ又はアンプランプされるとき、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bによってホルダ101cの底部101fをベース部101eに当接させる。ここで、光ディスク111がクランプされるときとは、例えば、マイクロコンピュータ110がローディングモータ106bを駆動させているときである。なぜなら、本実施例においては、ディスクトレイ106aの搬入又は搬出と連動して光ディスク111がクランプ又はアンクランプされるからである。さらに、マイクロコンピュータ110は、クランプ又はアンクランプ動作中でない場合、ディスク再生時に直ちにディスク記録面へレンズ焦点を合わせるために、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bによって光ピックアップ101を基準位置に配置させる。ここで、光ディスク111のクランプ/アンクランプ動作中でない場合とは、本実施例では、マイクロコンピュータ110がローディングモータ106bを駆動させていないときである。
【0023】
なお、本実施例において、マイクロコンピュータ110、サーボ信号処理部103、ドライバ104及びドライバ108が、アクチュエータ101b又はローディングモータ106bの駆動を制御する駆動制御部として働き、駆動制御部は、搬入又は搬出の指示信号が入力されたとき、光ディスク111から遠ざかる方向へホルダ101cを変位させるようアクチュエータ101bの駆動を制御して、ホルダ101cの底部101fをベース部101eに当接させるとともに、ローディングモータ106bの駆動を制御して、ディスクローディング部106にディスクトレイ106aの搬入又は搬出を開始させる。また、駆動制御部は、ディスクトレイ106aの搬入又は搬出が完了したとき、ホルダ101cが基準位置へ配置されるようアクチュエータ101bの駆動を制御する。
【0024】
次に、本発明の好ましい実施形態によるディスク再生装置100の動作について説明する。図3は、ディスクトレイ106aの搬入が指示されたときのマイクロコンピュータ110の処理を示すフローチャートである。図4は、クランプ又はアンクランプ動作中におけるホルダ101cの位置状態を示す、光ピックアップ101の側面図である。図5は、ディスクトレイ106aの搬出が指示されたときのマイクロコンピュータ110の処理を示すフローチャートである。
【0025】
まず、ディスクトレイ106aが搬入されるときのマイクロコンピュータ110の処理について説明する。入力部109からディスクトレイ106a搬入の指示信号が入力されると、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、アクチュエータ101bを駆動させて、図4に示すように、ホルダ101cを光ディスク111からフォーカス軸方向に遠ざけて底部101fをベース部101eに当接させる(S11)。そして、マイクロコンピュータ110は、制御信号をローディングモータ106bへ出力し、ローディングモータ106bを駆動させて、ディスクトレイ106aをディスク再生装置100へ搬入させる(S12)。このとき、ディスクトレイ106aの搬入動作に連動して光ディスク111がクランプされるので、クランプによって生じる衝撃が光ピックアップ101に伝わる。しかし、ホルダ101cがすでにベース部101eに当接されているため、ホルダ2bとベース部101eとの衝突による叩き音を抑えることができる。次に、マイクロコンピュータ110は、ディスクトレイ106aがディスク再生装置100へ完全に搬入されると、ローディングモータ106bを停止させ、ディスクトレイ106aの搬入を完了する(S13)。そして、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、図2で示すように、対物レンズ101aが基準位置に配置されるよう、アクチュエータ101bを駆動させる(S14)。
【0026】
次に、ディスクトレイ106aが搬出されるときのマイクロコンピュータ110の処理について説明する。入力部109からディスクトレイ106a搬出の指示信号が入力されると、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、アクチュエータ101bを駆動させて、図4に示すように、ホルダ101cを光ディスク111からフォーカス軸方向に遠ざけて底部101fをベース部101eに当接させる(S21)。そして、マイクロコンピュータ110は、制御信号をローディングモータ106bへ出力し、ローディングモータ106bを駆動させて、ディスクトレイ106aをディスク再生装置100から搬出させる(S22)。このとき、ディスクトレイ106aの搬出動作に連動して光ディスク111がアンクランプされるので、アンクランプによって生じる衝撃が光ピックアップ101に伝わる。しかし、ホルダ101cがすでにベース部101eに当接されているため、ホルダ2bとベース部101eとの衝突による叩き音を抑えることができる。次に、マイクロコンピュータ110は、ディスクトレイ106aがディスク再生装置100から完全に搬出されると、ローディングモータ106bを停止させ、ディスクトレイ106aの搬出を完了する(S23)。そして、マイクロコンピュータ110は、制御信号をサーボ信号処理部103へ出力し、図2で示すように、対物レンズ101aが基準位置に配置されるよう、アクチュエータ101bを駆動させる(S24)。
【0027】
次に、本発明の別の好ましい実施形態によるディスク再生装置200について説明する。上述のディスク再生装置100と同一部分については、その説明を省略または簡略する。ディスク再生装置200では、入力部109からディスクトレイ106aの搬入又は搬出の指示信号が入力されると、マイクロコンピュータ110が計時を開始する。そして、マイクロコンピュータ110は、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bを駆動させて、所定時間が経過するまで、ホルダ101cの底部101fをベース部101eに当接させる。所定時間が経過すれば、マイクロコンピュータ110は、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bを駆動させて、対物レンズ101aを基準位置に配置させる。
【0028】
次に、本発明の別の好ましい実施形態によるディスク再生装置200の動作について説明する。図6は、ディスクトレイ106aの搬入又は搬出が指示されたときのマイクロコンピュータ110の処理を示すフローチャートである。
【0029】
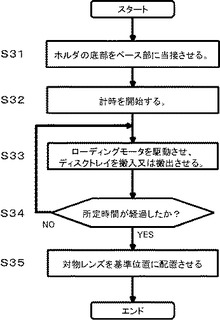
マイクロコンピュータ110は、入力部109からディスクトレイ106aの搬入又は搬出の指示信号が入力されると、制御信号をサーボ信号処理部103へ出力し、アクチュエータ101bを駆動させて、図4に示すように、ホルダ101cを光ディスク111からフォーカス軸方向に遠ざけて底部101fをベース部101eに当接させる(S31)。そして、マイクロコンピュータ110は、計時を開始する(S32)。次に、マイクロコンピュータ110は、制御信号をローディングモータ106bへ出力し、ローディングモータ106bを駆動させ、ディスクトレイ106aを搬入又は排出させる(S33)。次に、マイクロコンピュータ110は、所定時間が経過したか否かを判断する(S34)。ここでいう所定時間とは、計時開始からクランプ又はアンクランプが完了するまでに必要な充分な時間である。ステップ34で所定時間が経過したと判断した場合(S34:YES)、マイクロコンピュータ110は、サーボ信号処理部103へ制御信号を出力し、アクチュエータ101bを駆動させて、対物レンズ101aを基準位置に配置させる(S14)。光ディスク111がクランプ又はアンプランプされる間、ホルダ101cがベース部101eに当接されているため、ホルダ2bとベース部101eとの衝突による叩き音を抑えることができる。また、ディスクトレイ106aの搬入又は搬出動作期間内に光ディスク111のクランプ又はアンクランプが終了しない場合であっても、計時開始からクランプ又はアンクランプが完了するまでに必要な充分な期間を計時する所定時間として設定しているので、光ディスク111がクランプ又はアンプランプされる間、ホルダ101cがベース部101eに当接され、叩き音の発生を抑えることができる。なお、ステップ34で所定時間が経過していないと判断した場合(S34:NO)、マイクロコンピュータ110は、ステップ33に戻り、計時及びディスクトレイ106aの搬入を継続する。
【0030】
以上、本発明に係るディスク再生装置の好ましい実施形態の例について説明したが、上述した実施の形態は本発明を実施するための例示に過ぎない。例えば、ディスクローディング部106がセンサを有し、このセンサによって、ディスクトレイ106aのローディング動作又はアンローディング動作を検出し、ローディング中又はアンローディング中であることを示す検出信号をマイクロコンピュータ110へ出力するようにしても良い。ここでいうセンサとは、例えば、ディスクトレイ106aの位置に応じてオンオフされる1又は複数の機械的スイッチ又は光学的スイッチである。マイクロコンピュータ110は、入力される検出信号に基づいてローディング中又はアンローディング中を判断し、ローディング中又はアンローディング中である場合に、サーボ信号処理部103に制御信号を出力し、アクチュエータ101bを駆動させて、光ピックアップ101をベース部101eに当接させる。
【0031】
また、本発明の好ましい実施例であるディスク再生装置100において、入力部109からディスクトレイ106aの搬入又は排出の指示信号が入力されてから、ディスクトレイ106aが完全に搬入又は搬出されるまで、底部101fをベース部101eに当接させるようにしたが、その限りではない。例えば、ディスク再生装置100が、クランプ完了又はアンクランプ完了したことを検出してその検出信号をマイクロコンピュータ110へ出力するセンサをさらに有し、マイクロコンピュータ110が、当該センサから検出信号が入力されるまで、底部101fをベース部101eに当接させるようにしても良い。
【産業上の利用可能性】
【0032】
本発明は、ディスク再生装置に好適に採用され得る。
【符号の説明】
【0033】
100 ディスク再生装置
101 光ピックアップ
101a 対物レンズ
101b アクチュエータ
101c ホルダ
101d ベース部
101e 底部
102 RFアンプ
103 サーボ信号処理部
104 ドライバ
105 ディスクモータ
106 ディスクローディング部
106a ディスクトレイ
106b ローディングモータ
107 ターンテーブル
108 ドライバ
109 入力部
110 マイクロコンピュータ
111 光ディスク
【特許請求の範囲】
【請求項1】
対物レンズを保持するホルダと、該ホルダをフォーカス軸方向に変位させるアクチュエータと、該ホルダを支持するベース部とを有する光ピックアップと、
該アクチュエータの駆動を制御する駆動制御部とを備えるディスク再生装置であって、
光ディスクがクランプ又はアンクランプされるとき、該駆動制御部が、該光ディスクから遠ざかる方向へ該ホルダを変位させるよう該アクチュエータの駆動を制御し、該ホルダの底部を該ベース部に当接させる、ディスク再生装置。
【請求項2】
前記光ディスクを積載するディスクトレイを有し、該ディスクトレイを搬入及び搬出するディスクローディング部をさらに備え;
該駆動制御部が、
搬入又は搬出の指示信号が入力されたとき、該光ディスクから遠ざかる方向へ前記ホルダを変位させるよう前記アクチュエータの駆動を制御して、該ホルダの底部を前記ベース部に当接させるとともに、該ディスクローディング部に該ディスクトレイの搬入又は搬出を開始させ、
該ディスクトレイの搬入又は搬出が完了したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する、請求項1に記載のディスク再生装置。
【請求項3】
前記駆動制御部が、
搬入又は搬出の指示信号が入力されたとき、計時を開始し、前記光ディスクから遠ざかる方向へ前記ホルダを変位させるよう前記アクチュエータの駆動を制御して、該ホルダの底部を前記ベース部に当接させ、
計時開始から所定時間が経過したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する、請求項1に記載のディスク再生装置。
【請求項1】
対物レンズを保持するホルダと、該ホルダをフォーカス軸方向に変位させるアクチュエータと、該ホルダを支持するベース部とを有する光ピックアップと、
該アクチュエータの駆動を制御する駆動制御部とを備えるディスク再生装置であって、
光ディスクがクランプ又はアンクランプされるとき、該駆動制御部が、該光ディスクから遠ざかる方向へ該ホルダを変位させるよう該アクチュエータの駆動を制御し、該ホルダの底部を該ベース部に当接させる、ディスク再生装置。
【請求項2】
前記光ディスクを積載するディスクトレイを有し、該ディスクトレイを搬入及び搬出するディスクローディング部をさらに備え;
該駆動制御部が、
搬入又は搬出の指示信号が入力されたとき、該光ディスクから遠ざかる方向へ前記ホルダを変位させるよう前記アクチュエータの駆動を制御して、該ホルダの底部を前記ベース部に当接させるとともに、該ディスクローディング部に該ディスクトレイの搬入又は搬出を開始させ、
該ディスクトレイの搬入又は搬出が完了したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する、請求項1に記載のディスク再生装置。
【請求項3】
前記駆動制御部が、
搬入又は搬出の指示信号が入力されたとき、計時を開始し、前記光ディスクから遠ざかる方向へ前記ホルダを変位させるよう前記アクチュエータの駆動を制御して、該ホルダの底部を前記ベース部に当接させ、
計時開始から所定時間が経過したとき、該ホルダが基準位置へ配置されるよう該アクチュエータの駆動を制御する、請求項1に記載のディスク再生装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−70708(P2011−70708A)
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願番号】特願2009−218258(P2009−218258)
【出願日】平成21年9月22日(2009.9.22)
【出願人】(000000273)オンキヨーサウンド&ビジョン株式会社 (502)
【Fターム(参考)】
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願日】平成21年9月22日(2009.9.22)
【出願人】(000000273)オンキヨーサウンド&ビジョン株式会社 (502)
【Fターム(参考)】
[ Back to top ]