
ディスク装置

【課題】 ディスクの搬入時や排出時に、挿入口から別のディスクが挿入されたときに、搬入又は排出されていたディスクと、新たな別のディスクの双方を排出でき、ディスクが筐体内部に残ることを防止できる「ディスク装置」を提供する。
【解決手段】 ディスクを搬入しているとき又は搬出しているときに、ディスクの外周検知部材が2回ディスクを検知したときは、1枚のディスクが排出された後に、ST22において、光学検知素子F1,F2を使用して、筐体の内部に他のディスクが存在しているかの確認を行う。光学検知素子F1,F2がディスクを検知したら、筐体の内部にディスクが残っていると判断し、ST26に移行してディスクの排出動作を行う。
【解決手段】 ディスクを搬入しているとき又は搬出しているときに、ディスクの外周検知部材が2回ディスクを検知したときは、1枚のディスクが排出された後に、ST22において、光学検知素子F1,F2を使用して、筐体の内部に他のディスクが存在しているかの確認を行う。光学検知素子F1,F2がディスクを検知したら、筐体の内部にディスクが残っていると判断し、ST26に移行してディスクの排出動作を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、筐体の挿入口から挿入されたディスクが搬送機構によって装填完了位置に移送され、また装填完了位置のディスクが搬送機構によって挿入口から排出されるディスク装置に係り、特に、誤ってディスクが二重挿入されたことを検知できるディスク装置に関する。
【背景技術】
【0002】
車載用などのディスク装置は、筐体の前面にスリット状の挿入口が開口しており、挿入口の内側には移送ローラを有する搬送機構が設けられている。挿入口から挿入されたディスクは、移送ローラの回転力によって筐体の内部に移送され、筐体の内部に設けられた回転駆動部にクランプされる。
【0003】
あるいは、特許文献1に記載のディスク収納型ディスク装置では、筐体内に、それぞれがディスクを保持する支持体(トレイ)がディスクの厚み方向に重ねられて配置されている。筐体内には、支持体選択手段が設けられ、この支持体選択手段によっていずれかの支持体が選択される。挿入口から挿入されたディスクは、移送ローラによって筐体内に搬入されて、選択された支持体に供給されて保持される。
【0004】
この種のディスク装置では、挿入口から挿入されたディスクや筐体内のディスクを検知するために、センサやスイッチが設けられている。特許文献2に記載のディスク装置では、筐体内に、挿入口から挿入されるディスクを検知する複数のセンサおよびスイッチが設けられている。
【特許文献1】特開2001−307406号公報
【特許文献2】特開2002−279716号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
筐体にスリット状の挿入口が開口した、いわゆるスロットインタイプのディスク装置は、ディスクが筐体の内部に搬入されている途中で、誤って他のディスクが挿入口から挿入されると、最初のディスクと共に後続のディスクが搬送機構に挟持されて筐体の内部に向けて一緒に搬入されることがあり得る。このとき、センサやスイッチが二枚のディスクを途切れることなく検知すると、制御部は1枚のディスクが搬入されているのと同じ制御動作を行うことになり、先行するディスクが既に筐体内の所定位置に搬入されているにもかかわらず搬送機構が搬入動作を継続するという問題がある。
【0006】
逆に、筐体内から挿入口へディスクを搬出している途中で、誤って他のディスクが挿入口から挿入され、他のディスクが搬出中のディスクと共に搬送機構で挟持されると、移送ローラに接しているいずれか一方のディスクだけが挿入口に送り出され、他方のディスクが筐体の内部に取り残されることがある。この場合に、送り出された一方のディスクが挿入口から抜き出されたことがセンサやスイッチで検知された時点で、制御部がディスクの排出を完了したと判断し、制御動作がリセットされてしまう。よって、その後に、筐体内にディスクが存在しているにもかかわらず、さらに他のディスクを受け付けてしまったり、あるいは筐体内で他のディスクを選択する選択動作が開始されるなどの問題がある。
【0007】
本発明は上記従来の課題を解決するものであり、ディスクの搬入時や搬出時に、挿入口から別のディスクが挿入されたときに、その異常を正確に認識でき、全てのディスクを排出するなどの対処が可能なディスク装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
第1の本発明は、筐体に開口する挿入口と、前記挿入口から挿入されたディスクを前記筐体内の装填完了位置へ向けて搬送する搬送機構とを有するディスク装置において、
前記挿入口から挿入されたディスクが前記装填完了位置に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬入動作を開始した後に、前記外周検知部材が2回検知状態となったときに、前記搬送機構を逆転させてディスクの排出動作に移行することを特徴とするものである。
【0009】
本発明のディスク装置は、ディスクの外周位置を検知する外周検知部材を使用して、ディスクの二重挿入を検知している。外周検知部材は、挿入口から挿入されたディスクの直径が所定の値を超えているか否かを判断することで、直径が規定よりも小さいディスクが筐体の内部に入り込むことを防止するための機能も分担している。制御部がこの外周検知部材の検知動作を監視し、ディスクの挿入動作中に2回検知状態となったらディスクの二重挿入であると判断する。この判断により、ディスクの二重挿入を高い確率で認識でき、直ちにディスクを搬出させる動作に移行できる。
【0010】
また、第1の本発明は、ディスクの搬出動作が完了した後に、他のディスクが前記筐体内に残っているか否かの確認動作を行うものである。
【0011】
この確認動作を行うことにより、二重挿入が行われたときに、筐体の内部にディスクが残る現象をさらに確実に防止できるようになる。
【0012】
第2の本発明は、筐体に開口する挿入口と、前記筐体内の装填完了位置に有るディスクを前記挿入口へ向けて搬送する搬送機構とを有するディスク装置において、
ディスクが前記装填完了位置から前記挿入口に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬出動作を開始した後に、前記外周検知部材が2回検知状態となったときに、ディスクの搬出動作を完了させるとともに、その完了後に、他のディスクが前記筐体内に残っているか否かの確認動作を行うことを特徴とするものである。
【0013】
第2の本発明では、ディスクを搬出しているときに他のディスクが挿入口から挿入されたときに、二枚のディスクが搬出されたか否かを確認できる。
【0014】
また、第1の本発明および第2の本発明において、前記確認動作により、前記筐体内に他のディスクが残っていることが検知されたときに、再度搬出動作が行われることが好ましい。
【0015】
上記制御により、二重挿入があったときに二枚のディスクを確実に搬出できる。
本発明は、前記確認動作は、前記外周検知部材以外の他の検知部材を用いて行われる。
【0016】
例えば、前記挿入口の内側に、ディスクが前記筐体の外へ取り出されたことを検知する挿入口側検知部材が設けられており、
前記挿入口側検知部材が前記他の検知部材として使用され、この挿入口側検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われる。
【0017】
この場合に、前記挿入口側検知部材は、移動するユニットに搭載されており、前記確認動作では、前記ユニットと共に前記挿入口側検知部材が、前記挿入口側から前記装填完了位置に向けて移動することが好ましい。
【0018】
あるいは、本発明は、前記装填完了位置に、ディスクを検知する装填完了検知部材が設けられており、
前記装填完了検知部材が前記他の検知部材として使用され、この装填完了検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われるものであってもよい。
【発明の効果】
【0019】
本発明のディスク装置は、ディスクの搬入時や搬出時に、挿入口から別のディスクが挿入されたときに、二重挿入が行われたことを高い精度で検知できる。また、二重挿入が行われたと判断した後は、排出すべき二枚のディスクを確実に排出して、ディスク装置の制御動作を正常な状態に戻すことが可能になる。
【発明を実施するための最良の形態】
【0020】
図1は本発明のディスク装置の全体構造を示す分解斜視図、図2と図3は第2の動力伝達部の構造を動作別に示す平面図、図4は移送ユニットの部分斜視図、図5はディスク装置に搭載されている種々の検知機構を示す平面図である。図6以下は動作説明図、図11は回路ブロック図である。
【0021】
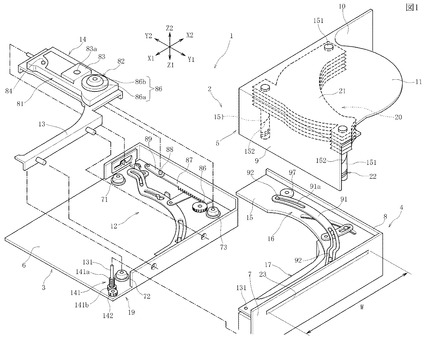
図1に示すディスク装置1は箱型の筐体2を有している。図1において、筐体2の基準方向は、図示Z1側が下側、Z2側が上側、X1側が左側、X2側が右側、Y1側が手前側、Y2側が奥側である。また、図示X1−X2方向が横方向、Y1−Y2方向が奥行き方向(前後方向)である。
【0022】
筐体2は下側から上側に向けて下部筐体3、中間筐体4および上部筐体5が順に重ねられて組み立てられている。下部筐体3は筐体2の底面6を有し、中間筐体4は筐体2の前面7と右側面8を有している。上部筐体5は筐体2の左側面9と後面10および天井面11を有している。
【0023】
下部筐体3の底面6の上面には第1の動力伝達部12が設けられている。第1の動力伝達部12の上にはユニット支持ベース13が支持され、ユニット支持ベース13の上に駆動ユニット14が搭載されている。中間筐体4の上部には、底面6と平行な機構ベース15が設けられ、機構ベース15の上に第2の動力伝達部16が設けられている。
【0024】
上部筐体5は、左側面9と後面10および天井面11で囲まれた領域がディスク収納領域20となっており、ディスク収納領域20に、それぞれがディスクDを支持可能な複数の支持体21が厚み方向(図示Z1−Z2方向)に6枚重ねられて配置されている。上部筐体5には支持体選択手段22が設けられており、支持体選択手段22の動作により、6枚の支持体21のいずれかが選択されて選択位置に移動させられるとともに、選択された支持体21とその下に隣接する支持体21との間隔が広げられる。
【0025】
ディスクDは、直径が12cmであり、例えばCD(コンパクト・ディスク)、CD−ROM、DVD(ディジタル・バーサタイル・ディスク)などである。
【0026】
図1に示すように、筐体2の前面7には挿入口23が開口している。挿入口23はスリット状であり、上下方向の幅寸法がディスクDの厚み寸法よりもわずかに大きく、横方向の開口幅寸法WがディスクDの直径よりもわずかに広い。
【0027】
中間筐体4には、機構ベース15の下側で且つ前面7の内側に移送ユニット17が設けられている。図1と図4に示すように、移送ユニット17の図示X1側の端部と、下部筐体3の底面6との間に、第3の動力伝達部19が設けられている。第3の動力伝達部19はローラ駆動手段として機能している。
【0028】
移送ユニット17は挿入口23と同じ高さ位置にあり、挿入口23から挿入されたディスクDが、移送ユニット17によってディスク収納領域20に向けて移送される。複数枚の支持体21のうちの、選択位置に至った支持体21は、挿入口23と同じ高さ位置となり、挿入口23から挿入されたディスクDは、移送ユニット17で移送されて、選択位置にある支持体21の下面に供給されて保持される。この実施の形態では、選択位置にある支持体21にディスクDが保持されたときが、ディスクDの装填完了位置である。
【0029】
図1に示すように、下部筐体3の底面6上の3箇所に、弾性支持部材であるダンパー71,72,73が固定されている。ダンパー71,72,73は、ゴムなどの可撓性の袋体の内部に、オイルなどの液体または気体が封入されているものである。
【0030】
ユニット支持ベース13の底面には支持軸が下方に向けて垂直に固定されており、各支持軸がダンパー71,72,73に支持されて、ユニット支持ベース13は、各ダンパー71,72,73によって、筐体2の底面6上で弾性支持可能となっている。
【0031】
図1に示すように、駆動ユニット14は、細長い駆動ベース81を有している。ユニット支持ベース13の奥側には支持軸84が上向きに垂直に突出しており、駆動ベース81が支持軸84に支持されて、駆動ユニット14がX−Y平面に沿って回動自在となっている。
【0032】
下部筐体3の底面6の上面には、第1の動力伝達部12を動作させる第1のモータM1(図11参照)が設けられている。第1の動力伝達部12では、第1のモータM1の動力がピニオン歯車85を介してラック部材87に伝達されて、ラック部材87がY1−Y2方向へ移動する。ラック部材87のY1方向への移動力はユニット駆動部材89に伝達される。ユニット駆動部材89にはZ2方向へ起立した駆動ピン88が設けられている。ラック部材87およびユニット駆動部材89と共に駆動ピン88がY1方向へ移動するときに、駆動ピン88の移動力によって、駆動ユニット14が、図6において点線で示す退避位置から、同じく図6において実線で示す介入位置まで回動させられる。
【0033】
図1に示すように、駆動ユニット14の回動自由端側には回転駆動部82が設けられている。回転駆動部82は、駆動ベース81の回動自由端側の上面にスピンドルモータが固定され、このスピンドルモータのモータ軸に回転テーブル86が固定されている。回転テーブル86には、ディスクDの下面が設置される円盤状の支持面86aと、この支持面86aの中心部から上方へ突出してディスクDの中心穴内に介入する凸部86bとが一体に形成されている。駆動ベース81には光ヘッド83が設けられており、光ヘッド83の上面に対物レンズ83aが設けられている。光ヘッド83は互いに平行に配置された一対の案内部材(図示せず)によって案内されて移動し、このとき対物レンズ83aが、回転テーブル86に支持されたディスクDの記録面に沿って移動する。
【0034】
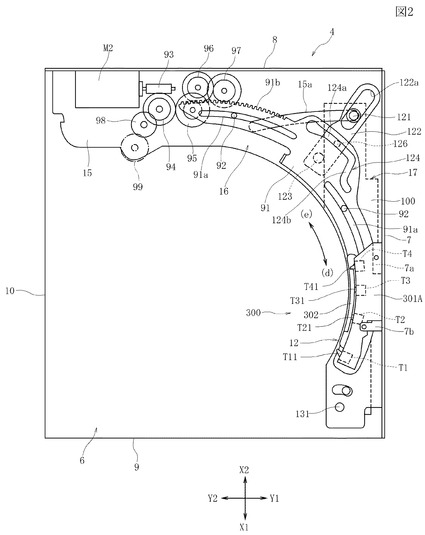
図2と図3に示す第2の動力伝達部16は、機構ベース15の上に、円弧形状の切換え部材91が設けられている。切換え部材91には、円弧軌跡に沿って延びる一対の案内長穴91a,91aが形成されている。機構ベース15上には一対の案内軸92,92が上向きに突出して固定されており、それぞれの案内軸92が案内長穴91a内に挿入されている。この支持機構により、切換え部材91は円弧軌跡に沿って図示(d)方向および(e)方向へ摺動自在に案内されている。また、切換え部材91の外周側の縁部には円弧軌跡に沿ってラック歯91bが形成されている。
【0035】
機構ベース15上には、第2のモータM2が設けられている。第2のモータM2の回転軸にはウォーム歯車93が固定されている。機構ベース15上には出力歯車94が設けられ、出力歯車94がウォーム歯車93に常に噛み合っている。
【0036】
第2のモータM2の回転動力は、出力歯車94から歯車95,96を経てピニオン歯車97に減速して伝達される。ピニオン歯車97は、切換え部材91のラック歯91bと常に噛み合っている。
【0037】
出力歯車94の側方には伝達歯車99および切換え歯車98が設けられている。機構ベース15上には、切換え歯車98を、出力歯車94および伝達歯車99の双方に噛み合う位置と、伝達歯車99から離れる位置との間で切換える切換え手段(図示せず)が設けられている。この切換え手段は、第1の動力伝達部12に設けられた第1のモータM1の動力によって動作させられる。切換え歯車98が出力歯車94と伝達歯車99の双方に噛み合ったときに、第2のモータM2の動力は、伝達歯車99を経て、図1に示す支持体選択手段22に伝達される。
【0038】
機構ベース15の下には、ディスクの搬送機構として機能する移送ユニット17が設けられている。移送ユニット17は、図示X1−X2方向へ向けて細長く延びる金属製のユニット枠100を有している。
【0039】
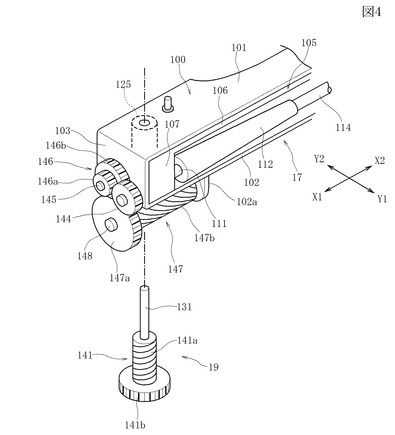
図4に示すように、ユニット枠100は、上面101と下面102および支点側の側面103と自由端側の側面を有し、ユニット枠100の内部は図示Y1−Y2方向に貫通している。ユニット枠100の内部には、低摩擦係数の合成樹脂で形成された摺動部材105が設けられている。摺動部材105は、ユニット枠100の上面101の内面に沿って延びる挟持部106と、支点側の側面103の内側に位置する側部案内部107と、自由端側の側面の内側に位置する側部案内部とを有している。側部案内部どうしの対向間隔は、ディスクDの直径よりも広く、挿入口23の開口幅寸法とほぼ同じか、それよりもやや広く形成されている。
【0040】
図4に示すように、移送ユニット17では、ユニット枠100内にローラ軸111が設けられている。ローラ軸111は、ユニット枠100の上面101と平行に延び、その両端は支点側の側面103と自由端側の側面に回転自在に支持されている。図4と図5にも示されるように、ローラ軸111の外周に合成ゴムや天然ゴムなどの摩擦係数の高い材料で形成された第1の移送ローラ112と第2の移送ローラ113が設けられている。移送ローラ112と移送ローラ113は、軸方向に間隔を空けて配置されている。移送ユニット17が図2と図6に示す待機位置にあるとき、移送ローラ112と113は、筐体2の前面7とほぼ平行で、且つディスク挿入中心から左右に等距離離れた位置に配置されている。
【0041】
第1の移送ローラ112と第2の移送ローラ113との中間に位置する中間部114は、ディスクDに対して実質的に移送力を与えない部分である。中間部114は、ローラ軸111が直接に露出して形成されている。
【0042】
第1の移送ローラ112と第2の移送ローラ113は、摺動部材105の挟持部106に対向している。移送ローラ112,113と挟持部106の少なくとも一方がばねで付勢されて、移送ローラ112,113と挟持部106とが互いに弾性的に圧接されている。よって、移送ローラ112と挟持部106、および移送ローラ113と挟持部106とでディスクDを挟持可能である。なお、この圧接状態では、中間部114と挟持部106との隙間が、ディスクDの厚み寸法よりも広くなっており、中間部114と挟持部106との間でディスクDが挟持されることはない。
【0043】
第1の移送ローラ112および第2の移送ローラ113は、ローラ軸111の外周に接着することなくローラ軸111の外周に回転自在に挿通されている。ディスクDに対する挟持圧が移送ローラ112,113に作用しているときには、移送ローラ112,113とローラ軸111との摩擦力が増大して、ローラ軸111と移送ローラ112,113が一体となって回転する。また、挟持中のディスクDが人の指で掴まれたときのように、移送されるディスクDに大きな抵抗力が与えられると、移送ローラ112,113に対してローラ軸111がスリップ回転できるように構成されている。
【0044】
図1と図4に示すように、移送ユニット17の回動支点となる支点軸131は、下部筐体3の底面6において、上方へ垂直に延びるように固定されている。図4に示すように、移送ユニット17には、図示X1側の端部にローラ軸111と直交する方向に延びる軸受部125が設けられており、軸受部125が支点軸131に回動自在に支持されている。
【0045】
図2と図3に示すように、移送ユニット17のY2側の端部には、ユニット枠100の上面からZ2方向へ突出する駆動ピン121が固定されている。機構ベース15には、支点軸131を中心とする円弧軌跡に沿って形成された案内長穴15aが開口しており、駆動ピン121は、案内長穴15aを通過して機構ベース15の上方へ突出している。
【0046】
第2の動力伝達部16は、機構ベース15の上に、軸123を支点として回動する回動レバー122が設けられている。回動レバー122は機構ベース15と切換え部材91との間に挟まれて位置している。回動レバー122には駆動長穴122aが開口しており、駆動ピン121は駆動長穴122a内に摺動自在に挿通されている。
【0047】
図2と図3に示すように、切換え部材91には切換えカム穴124が形成されている。回動レバー122の上面には、軸123と駆動長穴122aとの間に制御ピン126が固定されており、この制御ピン126が切換えカム穴124内に摺動自在に挿通されている。
【0048】
切換えカム穴124には、切換え部材91の移動軌跡である円弧軌跡に沿って延びる逃げ部124aと、この逃げ部124aの(d)側の端部からX1方向へ屈曲する駆動部124bとが一体に形成されている。
【0049】
第2の動力伝達部16では、切換え部材91が(d)側の移動始端に位置している状態から(e)方向へ移動する移動行程の前半において、切換えカム穴124の逃げ部124aが制御ピン126と摺動するために、移送ユニット17が待機位置に停止している。図2および図6に示すように、待機位置では、ユニット枠100が、筐体2の前面7の内側に位置し、ローラ軸111がほぼ図示X1−X2方向へ延びている。また、待機位置にある移送ユニット17は、ユニット枠100が、支持体21に支持されているディスクDの外周縁からY1方向へわずかに離れている。
【0050】
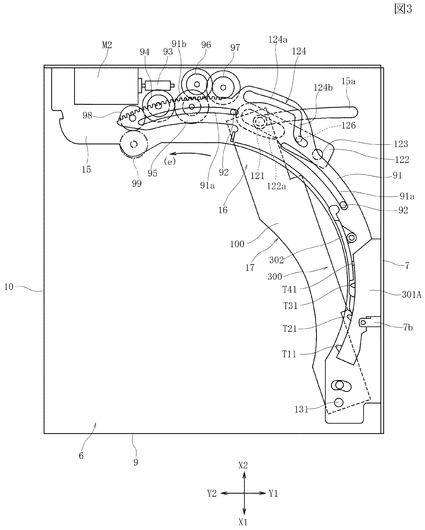
切換え部材91が、図2に示す位置からさらに(e)方向へ回動すると、切換えカム穴124の駆動部124bによって、制御ピン126が(e)方向へ押され、図3および図5に示すように、移送ユニット17が待機位置から反時計方向へ回動して、移送動作位置に至る。
【0051】
図1と図4に示すように、第3の動力伝達部19では、下部筐体3の底面6に固定された支点軸131の下方に、一体ギヤ141が回転自在に挿通されている。一体ギヤ141は、上方部分が垂直に延びるウォーム歯車141aであり、下方部分が下部歯車141bである。図1に示すように、底面6には中間歯車142が回転自在に設けられ、中間歯車142が下部歯車141bに噛み合っている。底面6には第3のモータM3(図11参照)が設けられており、その回転軸に固定されたウォーム歯車が中間歯車142と噛み合っている。
【0052】
図4に示すように、移送ユニット17は、ローラ軸111の一端が、ユニット枠100の支点側の側面103から外方へ突出しており、側面103から突出したローラ軸111の端部に平歯車であるローラ歯車144が固定されている。側面103には軸145が固定され、軸145に一体ギヤ146が回転自在に支持されている。一体ギヤ146は、小径平歯車146aと大径平歯車146bとが一体化されたものであり、小径平歯車146aがローラ歯車144と噛み合っている。
【0053】
ユニット枠100の下面102に、下方へ突出する支持片102aが一体に折り曲げ形成されており、支持片102aに軸148が固定されている。軸148はローラ軸111と平行に延びている。軸148には一体ギヤ147が回転自在に支持されている。一体ギヤ147は平歯車147aとウォームホイール147bとが一体化されたものである。平歯車147aが大径平歯車146bと噛み合っている。
【0054】
移送ユニット17に設けられた軸受部125が支点軸131に回動自在に挿通された状態で、ウォームホイール147bとウォーム歯車141aとが噛み合う。第3のモータM3の回転動力は、中間歯車142から下部歯車141bおよびウォーム歯車141aに伝達され、さらにウォーム歯車141aからウォームホイール147bに伝達される。その動力は、平歯車147aから一体ギヤ146の大径平歯車146bに伝達され、さらに小径平歯車146aからローラ歯車144に伝達される。
【0055】
第3のモータM3の回転動力が、支点軸131と同軸に回転する一体ギヤ141を介してローラ歯車144に伝達されるため、移送ユニット17を、支点軸131を支点として待機位置から移送動作位置へ回動させる動作と独立させて、ローラ軸111を駆動することができる。
【0056】
図2と図3に示すように、機構ベース15上には、切換え部材91の摺動位置を検知するための摺動検知手段300が設けられている。
【0057】
摺動検知手段300は検知基板301Aを有し、検知基板301Aに検知スイッチ(検知部材)T1,T2,T3,T4が取り付けられている。筐体2の前面7から図示Y2側へ曲げられた取り付け部7a,7bが設けられ、検知基板301Aは、取り付け部7a,7bにねじで固定されている。検知基板301Aはプリント基板であり、その表面に所定の配線パターンがスクリーン印刷等により形成されている。検知スイッチT1〜T4の動作信号が、配線パターンを経てCPUなどの制御部401(図11参照)に与えられる。検知スイッチT1,T2,T3,T4は、Y2方向へ突出する押圧式のアクチュエータT11,T21,T31,T41を有している。
【0058】
切換え部材91の上面には、その円弧形状に沿って延びる検知カム302が固定されて、検知カム302が切換え部材91とともに円弧軌跡に沿って(d)―(e)方向に移動する。
【0059】
切換え部材91が(d)方向の移動終端にあるとき、検知カム302によって、全てのアクチュエータT11〜T41が押され、検知スイッチT1,T2,T3,T4は全てONである。切換え部材91が(d)方向の移動終端から(e)方向へ向けて移動すると、検知カム302が、アクチュエータT11,T21,T31,T41から順番に離れ、検知スイッチがT1,T2,T3,T4の順にONからOFFに切り換わる。
【0060】
図11に示すように、検知スイッチT1ないしT4の検知出力は、スイッチ検出回路402で個別に検知されて制御部401に与えられる。制御部401では、検知スイッチT1がONのときに切換え部材91が(d)方向の移動終端に至ったと認識する。その後、切換え部材91が(e)方向へ移動するときに、検知スイッチT2がONからOFFとなったときに、移送ユニット17が図2と図6に示す待機位置から、反時計方向へ回動し始めたことを認識し、検知スイッチT3がONからOFFとなったときに、移送ユニット17が図3と図5に示す移送動作位置に至ったものと認識する。検知スイッチT4がONからOFFになったときに、切換え部材91が(e)方向の移動終端に至ったと判断する。
【0061】
図1に示すディスク収納領域20に設けられた支持体選択手段22では、上部筐体5の天井面11に、互いに平行に下方へ向けて延びる3本の選択軸151が回転自在に支持されている。天井面11には、全ての選択軸151を同期して回転させる大径歯車(図示せず)が設けられており、図2と図3に示す伝達歯車99がこの大径歯車に噛み合っている。第2の動力伝達部16において切換え歯車98が出力歯車94と伝達歯車99に噛み合っているときに、第2のモータM2が動作すると、その回転力が伝達歯車99から大径歯車に伝達され、3本の選択軸151が駆動される。この間、切換え部材91に形成された切換えカム穴124の逃げ部124aが制御ピン126と摺動するため、移送ユニット17が回動させられることはない。逆に、切換えカム穴124の駆動部124bで回動レバー122が駆動され、移送ユニット17が回動させられるときは、切換え歯車98が伝達歯車99から離れ、第2のモータM2の動力は伝達歯車99に伝達されない。
【0062】
3本の選択軸151には、それぞれ螺旋状の選択溝152が形成されており、それぞれの選択溝152は、選択軸151の上端と下端で螺旋ピッチが密になり、選択軸151の中間部で螺旋ピッチが疎になっている。個々の支持体21には3個ずつの軸受部が設けられ、それぞれの軸受部が選択軸151の外周に摺動自在に装着されている。そして、軸受部に設けられた係合部が選択溝152に摺動自在に挿通されている。3本の選択軸151が同期して回転すると、それぞれの支持体21が順番にZ1方向へ送られ、または順番にZ2方向へ送られる。選択された支持体21が選択軸151のほぼ中央部に至ったときに選択動作が終了し第2のモータM2が停止する。このとき、選択された支持体21は、挿入口23と同じ高さ位置で停止し、選択された支持体21とその下の支持体21との間隔が広げられ、上下の支持体21の間に駆動ユニット14が入り込めるようになる。
【0063】
図6に示すように、個々の支持体21には、保持爪155,156,157が設けられている。この保持爪155,156,157は、支持体21に設けられた前記軸受部の周囲を回動できるように支持されている。保持爪155,156,157は支持体21の下面に設けられ、それぞれが、図6に示すようにディスクを保持できる姿勢に向けてばねで付勢されている。挿入口23に挿入され、移送ユニット17によって移送されたディスクDは、選択位置にある支持体21の下面に供給され、この下面と保持爪155,156,157とで保持される。筐体2の内部には保持解除機能が設けられており、選択位置の支持体21に支持されたディスクDの中心穴Daが、駆動ユニット14の回転テーブル86にクランプされると、前記保持解除機構によってそれぞれの保持爪155,156,157が退避位置に回動させられて、支持体21でのディスクDの保持が解除される。
【0064】
筐体1の前面7の内側には、挿入口23を開閉する蓋部材であるシャッタが摺動自在に設けられている。切換え部材91に形成された切換えカム穴124の逃げ部124aが制御ピン126と摺動している範囲で、切換え部材91が(d)−(e)方向へ移動して、支持体21の選択動作が行われているときは、シャッタで挿入口23が閉鎖されている。選択された支持体21が選択位置へ移動すると、切換え歯車98が伝達歯車99から離れて、支持体21の選択動作が完了するが、その後に、切換え部材91が(e)方向へ移動すると、切換えカム穴124の駆動部124bが制御ピン126と係合する直前に、切換え部材91の移動力によりシャッタが駆動され、挿入口23が開放される。
【0065】
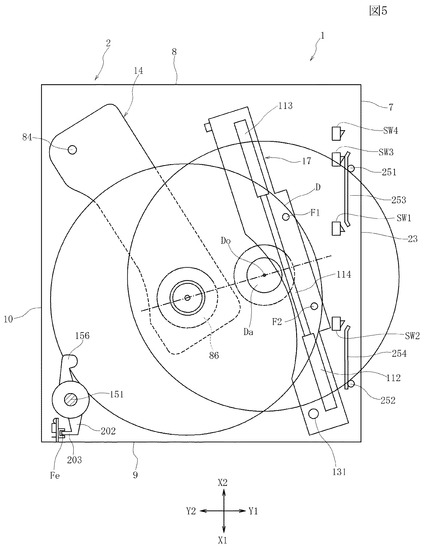
図5に示すように、筐体2の内部では、左側面9と後面10との角部に装填完了検知部材である検知素子Feが設けられている。この検知素子Feは、筐体2内に1箇所だけ設けられ、選択位置に移動した支持体21と同じ高さ位置に配置されている。検知素子Feは、発光素子と受光素子とが対向して設けられている。
【0066】
図5に示すように、それぞれの支持体21に設けられた保持爪156には、腕部202が一体に形成され、その先部に遮光部203が設けられている。保持爪156は前記ばねにより時計方向へ付勢され、ディスクDを保持していないときは時計方向へ回動している。よって、選択位置に至った支持体21がディスクDを保持していないときは、遮光部203が、発光素子と受光素子との間に介入し、受光素子に向かう光が遮られる。また、選択位置の支持体21の下面にディスクDが供給されると、ディスクDの外周縁によって保持爪156が反時計方向へ回動させられ、遮光部203が発光素子と受光素子との間から抜き出て、受光素子が受光状態となる。
【0067】
図11に示すように、検知素子Feの検知出力は光学検出回路403で検出されて制御部401に与えられる。制御部401では、検知素子Feからの検出信号によって、選択位置に至った支持体21にディスクDが装填されているか否かを認識できる。また、空の支持体21が選択位置で停止しているときに、挿入口23から挿入されたディスクDが、支持体21に保持されたか否か、すなわち、ディスクDが装填完了位置に至ったか否かを認識できる。
【0068】
図5と図6に示すように、移送ユニット17のユニット枠100には、挿入口側検知部材である一対の光学検知素子F1,F2が設けられている。光学検知素子F1,F2は、移送ユニット17のX1−X2方向の寸法の中心を挟んでX1側とX2側に等距離を空けて設けられている。すなわち、図6に示すように、光学検知素子F1と光学検知素子F2は、挿入口23から挿入されたディスクDの中心D0が通過する通過線Oから左右に均等に離れて位置している。
【0069】
それぞれの光学検知素子F1,F2は、図4に示すユニット枠100の上面101と下面102の一方に発光素子が他方に受光素子が設けられたものである。ディスクDが移送ユニット17内に入り込んでいないときは、発光素子からの光が受光素子で受光される。図6に示すように、挿入口23からディスクDが挿入されると、ディスクDが移送ローラ112,113に当たる前に、ディスクDのY2側の先端が光学検知素子F1,F2と重なる位置となり、受光素子への光が遮られる。
【0070】
図11に示すように、光学検知素子F1,F2の検知出力は、光学検出回路403で検知されて制御部401に与えられる。図6に示すように、移送ユニット17が待機位置にあるときに、光学検知素子F1,F2の少なくとも一方がディスクを検知したときに、制御部401はディスクDが挿入されたと認識し、ディスクの搬入動作に移行する。
【0071】
図5に示すように、筐体2の前面7と、待機位置にある移送ユニット17との間に、一対の検知部材251と252が設けられている。検知部材251と252は、垂直に延びる検知ピンであり、それぞれの検知部材251,252は、筐体2の内側において、挿入口23を上下に横断している。一方の検知部材251は、X1−X2方向に延びる検知板253に固定され、他方の検知部材252は、X1−X2方向に延びる検知板254に固定されている。検知板253と検知板254は、筐体2の前板7の内面に沿ってX1−X2方向へ互いに独立して移動可能である。そして、検知板253と検知板254は互いに接近する方向へばねで付勢されている。
【0072】
図6に示すように、ディスクDが挿入口23から挿入されていないとき、検知部材251と検知部材252は、挿入されるディスクDの中心D0の通過線OからX1方向とX2方向へ同じ距離だけ離れている。このときの検知部材251と検知部材252の間隔は、8cmよりもやや広く設定されている。よって、挿入口23から、誤って直径が8cmの小径ディスクが挿入されたときに、検知部材251と検知部材252が同時に互いに離れる方向へ移動させられることがない。そして、直径が12cmのディスクDが挿入口23から挿入されると、このディスクDの外周縁が検知部材251と検知部材252と摺動し、検知部材251と検知部材252が、通過線Oから離れる方向へ移動させられる。
【0073】
筐体2内には、一方の検知板253によって動作させられる機械動作式の検知スイッチSW1,SW3,SW4と、他方の検知板254によって動作させられる同じく機械動作式の検知スイッチSW2が設けられている。図11に示すように、検知スイッチSW1,SW2,SW3,SW4の切換え出力は、スイッチ検出回路402で個別に検出されて制御部401に与えられる。
【0074】
挿入口23からディスクDが挿入される前は、検知部材251と検知部材252が、前記ばねによって最も接近した初期位置にある。このとき、検知板253によって検知スイッチSW1がONに切換えられており、検知板254によって検知スイッチSW2がONに切換えられている。
【0075】
直径が12cmのディスクDが筐体2内に搬入されると、ディスクDの外周縁によって、検知部材251がX2方向へ押され、検知部材252がX1方向へ押されて、検知スイッチSW1とSW2が直ちにOFFになる。制御部401では、光学検知素子F1,F2がディスクの挿入を検知したときに搬入動作を開始するが、その後の所定時間以内に検知スイッチSW1とSW2が共にOFFになったことを検出することで、直径が8cmの小径ディスクではなく、直径が12cmのディスクDが搬入されている確率が高いものと判断して、そのまま搬入動作を継続する。
【0076】
搬入されているのが直径が12cmの正規のディスクDであるときは、ディスクDの中心D0が、検知部材251と検知部材252とを結ぶ線上に至ると、検知部材251がX2方向へ最も長い距離移動させられ、検知板253によって検知スイッチSW4が短時間だけOFFからONに切換えられる。制御部401は、光学検知素子F1,F2がディスクの挿入を検知し、搬入動作に移行してから所定時間以内に検知スイッチSW4が短時間だけON(ディスク検知状態)となったときに、搬入されているのが直径12cmの正規のディスクである確率がさらに高いと判断し、ディスクの搬入動作を継続する。
【0077】
なお、前記所定時間以内に検知スイッチSW4がONにならなかったときは、ディスクの搬入動作を中止し、搬出動作に移行して、ディスクなどを挿入口23から排出する。
【0078】
よって、検知スイッチSW4は、挿入されるディスクDの中心D0が通過する通過線Oから一番離れた位置にある外周検知部材である。この実施の形態では、検知スイッチSW4によって、搬入時や搬出時にディスクDが二重挿入されたか否かを検知できるようにしている。
【0079】
ディスクDが選択された支持体21に保持される装填完了位置に至ると、ディスクDは検知部材251,252から離れ、検知部材251と検知部材252が初期位置へ復帰する。そして、検知スイッチSW1とSW2が再びOFFからONに切換えられる。
【0080】
筐体2内にあるディスクDが挿入口23から排出されるときは、ディスクDのY1側に向く外周縁によって検知部材251がX2方向へ移動させられ、検知部材252がX1方向へ移動させられる。このとき、検知スイッチSW1とSW2がONからOFFになり、さらにディスクDが搬出される過程で、検知スイッチSW3がONになり、検知スイッチSW4が短時間ONになる。ディスクDの中心D0が、検知部材251と検知部材252を結ぶ線よりもY1側へ移動すると、検知スイッチSW4が直ちにOFFになり、さらにディスクDがY1方向へ移動すると、検知スイッチSW3がONからOFFに切り換わる。
【0081】
制御部401は、ディスクの搬出過程において、検知スイッチSW3がONからOFFに切り換わったときに、搬出動作を停止させる。移送ローラ112,113の回転を停止させることにより、ディスクDはその一部が筐体2の内部に保持されている状態で、排出動作を停止させることができる。
【0082】
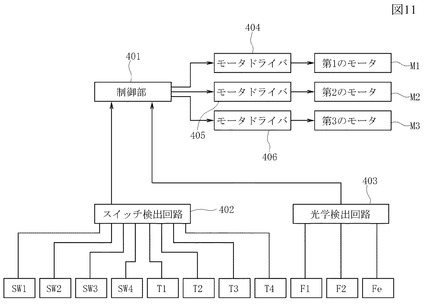
図11に示すように、各検知スイッチSW1,SW2,SW3,SW4および各検知スイッチT1,T2,T3,T4の検知出力はスイッチ検出回路402で個別に検出されて制御部401に与えられる。また、光学検知素子F1,F2および検知素子Feの検知出力は、光学検出回路403で個別に検出されて制御部401に与えられる。
【0083】
図1に示す第1の動力伝達部12の駆動源である第1のモータM1を駆動するモータドライバ404は制御部401で制御される。図2に示す第2の動力伝達部16の動力源である第2のモータM2を駆動するモータドライバ405、および図4に示す第3の動力伝達部19の駆動源である第3のモータM3を駆動するモータドライバ406も制御部401で制御される。
【0084】
次に、本発明のディスク装置1の動作について説明する。
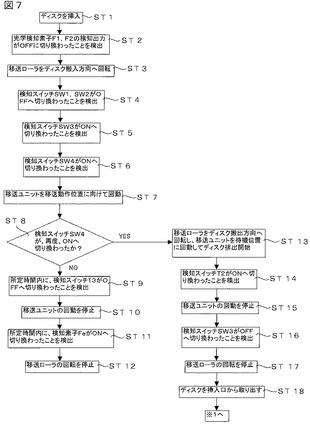
図6は、ディスクの搬入動作を示す平面図、図7と図8は、ディスクの搬入動作時の制御フローを示すフローチャートである。図9は、ディスクの搬出動作を示す平面図、図10は、ディスクの排出動作時の制御フローを示すフローチャートである。図7,図8,図10に示すフローチャートでは、各制御動作のステップを「ST」で示している。
【0085】
(ディスク挿入待機モード)
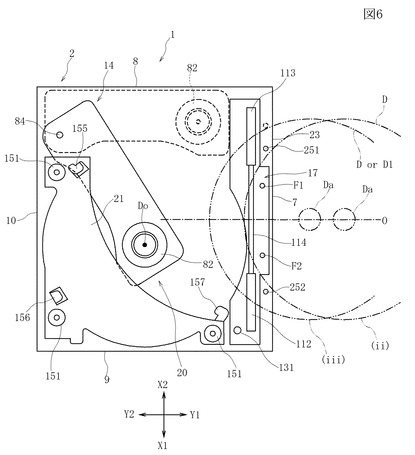
ディスクDの挿入を待機するホームポジションは、図6にて実線で示すように、駆動ユニット14がディスク収納領域20内に介入する介入位置にあり、移送ユニット17が筐体2の前面7の内側に沿う待機位置にある。
【0086】
筐体2の前面7を覆う化粧部に設けられた操作部を操作し、あるいはリモートコントローラを操作して、複数の支持体21のいずれかを指定する操作を行うと、制御部401によってモータドライバ404が制御され、図1に示す第1の動力伝達部12の駆動源である第1のモータM1が始動し、ラック部材87がY2方向へ駆動される。ラック部材87およびユニット駆動部材89がY2方向へ移動すると、ユニット駆動部材89に設けられた駆動ピン88によって、駆動ユニット14が、図6において実線で示す介入位置から点線で示す退避位置へ回動させられる。
【0087】
そして、図2に示す第2の動力伝達部16の駆動源である第2のモータM2が始動して、支持体21の選択動作が行われる。このとき、第2のモータM2の回転力は出力歯車94から歯車95,96を介してピニオン歯車97に与えられるため、切換え部材91が(d)方向または(e)方向へ回動する。ただし、このとき、回動レバー122に設けられた制御ピン126が切換えカム穴124の逃げ部124a内を摺動するため、回動レバー122が動くことなく、第2のモータM2の動力は、出力歯車94から切換え歯車98を介して伝達歯車99に伝達され、図1に示す支持体選択手段22の3本の選択軸151が駆動される。
【0088】
選択軸151が時計方向または反時計へ回転すると、選択軸151に形成された螺旋状の選択溝152によって、支持体21が上方向または下方向へに移動させられ、指定した空の支持体21が選択位置に至る。支持体21が選択位置に至ったときに、第2のモータM2が停止して支持体21の選択動作を終了する。その後、第1のモータM1の動力によって、第1の動力伝達部12のラック部材87がY1方向へ移動させられ、駆動ピン88によって、図6において、駆動ユニット14が、点線で示す退避位置から実線で示す介入位置へ回動させられて、再びホームポジションが設定される。
【0089】
このホームポジションでは、ユニット支持ベース13は、筐体2の底面6に接近するように下降した姿勢で保持されている。よって、ユニット支持ベース13に搭載されている駆動ユニット14の回転駆動部82が、選択位置にある支持体21から下方へ離れた位置で停止している。
【0090】
なお、切換え部材91が(d)−(e)方向へ移動して支持体21の選択動作が行われているときは、挿入口23はシャッタで閉鎖されている。指定した支持体21が選択位置へ移動した後に、図2に示す切換え歯車98が伝達歯車99から離れて支持体選択手段22への動力が絶たれた後に、第2のモータM2によって、切換え部材91が(e)方向へ駆動される。このとき、制御ピン126が切換えカム穴124の逃げ部124aの(d)側の端部に至り且つ検知スイッチT2がONからOFFに切換えられた時点で、切換え部材91によってシャッタが移動させられて、挿入口23が開放される。
【0091】
また、ディスクDが挿入される前は、検知部材251と検知部材252がばねの力で互いに最も接近した初期位置に設定されている。このとき、検知板253によって検知スイッチSW1がONに切換えられ、検知板254によって検知スイッチSW2がONに切換えられているが、検知スイッチSW3,SW4は共にOFFである。
【0092】
(正常なディスク搬入動作)
図7のST1において、挿入口23からディスクDが挿入されると、図6において(ii)で示すように、ディスクDのY2に向く周縁部が第1の移送ローラ112と第2の移送ローラ113に当たる前に、ディスクDによって光学検知素子F1,F2が遮られる。ST2では、光学検知素子F1と光学検知素子F2の少なくと一方の検知出力がONからOFFに切り換わったときにST3に移行し、ディスクDの搬入動作を開始する。
【0093】
ST3のディスク搬入動作では、まず、モータドライバ406が制御され、第3のモータM3が始動して、ローラ軸111がディスク搬入方向へ回転させられる。ディスクDが図6において(ii)で示す位置からさらにY2方向へ押し込まれると、ディスクDが、第1の移送ローラ112および第2の移送ローラ113と図4に示す挟持部106との間に挟まれ、移送ローラ112,113の回転力によってディスクDがY2方向へ搬入される。
【0094】
搬入されているのが、直径が8cm以上のディスクDであれば、ST4において、ディスクDの外周縁によって、検知部材251がX2方向へ押され、検知部材252がX1方向へ押されるため、検知スイッチSW1とSW2が共にONからOFFに切り換わる。制御部401は、検知スイッチSW1とSW2が共にOFFになったことを確認できたら、第3のモータM3の駆動を継続する。ディスクDが筐体2内に向けて搬入され続けると、ディスクDの外周縁で検知部材251がさらにX2方向へ押され、ST5において、検知スイッチSW3がOFFからONに切り換えられ、さらに、ST6において、外周検知部材である検知スイッチSW4がOFFからONに切り換えられる。
【0095】
光学検知素子F1とF2でディスクDの挿入が検知されてから所定時間が経過する前に、検知スイッチSW4がOFFからONに切り換わると、制御部401は、搬入されているのが直径12cmの正規のディスクDである確率が高いと判断し、ST7に移行する。なお、光学検知素子F1とF2でディスクDの挿入が検知されてから所定時間が経過する前に、ST4で検知スイッチSW1とSW2が共にOFFに切り換わらないときは第3のモータM3を逆転させて、ディスクDを挿入口23に向けて搬出する。また、所定時間以内にST6において検知スイッチSW4がONにならないときも、第3のモータM3を逆転させ、ディスクDを搬出する。
【0096】
ST7では、制御部401からモータドライバ405に指令が与えられて、第2の動力伝達部16の第2のモータM2が始動する。第2のモータM2によって図2に示す切換え部材91が(e)方向へ移動させられ、切換え部材91の切換えカム穴124の駆動部124bによって回動レバー122が反時計方向へ回動させられる。よって、それまで待機位置にあった移送ユニット17が図3に示す移送動作位置へ向けて回動させられる。なお、ディスクDの搬入に伴って、検知部材251は、ばねの力によってディスクDの外周縁を摺動してX1方向へ復帰するため、ST6においてONに切り換わった検知スイッチSW4は直ちにOFFに切り換わる。
【0097】
その後、制御部401は、ST8において、外周検知部材である検知スイッチSW4が再度OFFからONに切り換わるか否かを監視する。検知スイッチSW4が二度目のONにならないときは、ST9に移行して通常の搬入動作を続行する。
【0098】
ST9では、光学検知素子F1,F2がディスクDの挿入を検知してから所定時間以内に、検知スイッチT3がONからOFFに切換えられたか否かを確認する。ディスクDの搬入動作が継続し、第2のモータM2の動力によって第2の動力伝達部16の切換え部材91が(e)方向へ移動すると、図3に示すように、移送ユニット17が移送動作位置に正常に移行し、このときに、検知カム302がアクチュエータT31から離れ、検知スイッチSW3がONからOFFに切り換わる。制御部401は、検知スイッチSW3がONからOFFに切り換わった時点で、ST10に移行し、第2のモータM2を停止する。
【0099】
移送ユニット17が反時計方向へ回動している間は、第3のモータM3によってローラ軸111がディスク搬入方向へ回転させられている。そのため、ディスクDは移送ユニット17の回動力と、移送ローラ112,113の回転力の双方の力で筐体2内に送り込まれ、移送ユニット17が図3に示す移送動作位置に至った時点で、ディスクDは、選択位置にある支持体21の下面に供給されて装填完了位置となる。
【0100】
正常なディスクDが選択位置の支持体21の下面に移動して装填完了位置に移行すると、ディスクDが、支持体21の下面と図6に示す3個の保持爪155,156,157との間に保持されるとともに、図5に示す保持爪156がディスクDの外周縁によって反時計方向へ押され、遮光部203が検知素子Feから抜け出て、検知素子Feの受光素子が受光状態(ON)に切り換わる。制御部401は、ST11で検知素子Feの出力がONに切り換わったときに、ディスクDが装填完了位置に移動したと判断し、ST12に移行して第3のモータM3を停止し、ディスクDの搬入動作を完了する。
【0101】
その後、ユニット支持ベース13が持ち上げられ、駆動ユニット14が上昇して、回転駆動部82の回転テーブル86の中心凸部86bが選択位置の支持体21に保持されたディスクDの中心穴Daに嵌合し、中心穴Daが回転テーブル86にクランプされる。そして、第2のモータM2が逆転し、図3に示す切換え部材91が(d)方向へ移動させられ、同時に第3のモータM3が始動してローラ軸111がディスク搬入方向へ回転させられる。よって、移送ローラ112,113がディスクDの表面を転動しながら、移送ユニット17が時計方向へ回動して図2に示す待機位置に戻る。この時点で、切換え部材91によってシャッタが動作させられて、挿入口23が閉鎖される。
【0102】
そして、保持解除機構によって、図6に示す保持爪155,156,157が回動させられ、支持体21の下面でのディスクDの保持が解除される。さらに、ユニット支持ベース13が下降し、駆動ユニット14が底面6に向けて下降させられ、回転テーブル86に保持されたディスクDが選択位置の支持体21の下面から離される。そして、回転テーブル86と共にディスクDが回転駆動され、光ヘッド83によりディスクDに記録された情報が再生され、あるいはディスクDに情報が記録される。
【0103】
(ディスク搬入中の二重挿入)
図7のST8において、検知スイッチSW4が、再度、OFFからONに切り換わった場合にはST13に移行する。
【0104】
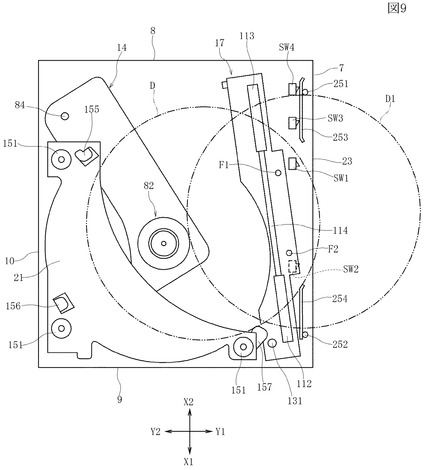
ディスクの搬入動作中に、検知スイッチSW4が、OFF−ONとなるのが2回発生する原因として、ディスクの二重挿入がある。移送ユニット17が移送動作位置に向けて回動してディスクDが支持体21に向けて搬入されている途中で、図9に示すように、別のディスクD1が、挿入口23から筐体2の内部に向けて挿入されると、移送ローラ112,113によって先行するディスクDと共に別のディスクD1が筐体2の内部に搬入され、ディスクD1の外周縁によって、検知部材251が再度X2方向へ移動させられ、検知板253によって、検知スイッチSW4が、再度、OFFからONに切り換えられる。
【0105】
このとき、制御部401は、搬送異常が発生していると判断し、ST13に移行してディスク搬出動作に移行する。ST13では、第3のモータM3を逆回転して移送ローラ112,113をディスク搬出方向に回転させ、同時に、第2のモータM2を逆転し、切換え部材91を(d)方向へ移動させて、移送ユニット17を待機位置に向けて時計方向へ回動させる。
【0106】
ST14で、検知スイッチT2がOFFからONに切り換えられると、制御部401は、図2に示すように、移送ユニット17が待機位置に移動したと判断され、ST15において、第2のモータM2を停止し、移送ユニット17の時計方向への回動を停止する。
【0107】
その後、ST16において、検知スイッチSW3がONからOFFに切り換わるかを監視する。ディスクの搬出動作で、少なくとも1枚のディスクが挿入口23に向けて搬出され、その中心が検知部材251と検知部材252を結ぶ線よりもY1側へ移動すると、その後は、ディスクの外周縁を摺動する検知部材251がばねの力でX1方向へ復帰し、検知板253が検知スイッチSW3から外れて、検知スイッチSW3がONからOFFになる。このとき、ST17に移行して、第3のモータM3を停止し、ローラ軸111の回転を停止させる。これにより、少なくとも1枚のディスクは、その一部が挿入口23から外部に突出した位置で停止する。
【0108】
なお、ST13において、搬出動作を開始した後の所定時間以内にST14において検知スイッチT2がONに切り換わらないとき、あるいはST13において、搬出動作を開始した後の所定時間以内にST16において検知スイッチSW3がOFFに切り換わらないときは、搬出動作異常と判断し、搬出動作を停止させるか、または再度ディスクを筐体内に送り込んでから排出動作に移行するリトライ処理が行われる。
【0109】
制御部401は、ST17において第3のモータM3を停止させ、搬出動作を終了した後に、ST18において光学検知素子F1,F2の検知出力を監視する。ST17においてローラ軸111の回転を停止させた時点では、少なくとも1枚のディスクがその一部を挿入口23から突出させた状態で停止しているため、光学検知素子F1,F2はディスクを検知している。このディスクが挿入口23から筐体2の外へ引き抜かれると、光学検知素子F1,F2がディスクを検知しない状態となる。
【0110】
制御部401はST18において光学検知素子F1,F2がディスクを検知しない状態となったら、少なくとも1枚のディスクが筐体2の外に取り出されたと判断する。
【0111】
ただし、図9に示すように、2枚のディスクが、移送ローラ112,113と挟持部106とで挟持されているときに、移送ローラ112,113をディスク搬出方向へ回転させると、移送ローラ112,113に接している下側のディスクに搬出力が作用するが、挟持部106に接している上側ディスクには搬出力が直接に作用しない。そのため、ST17の時点で、下側のディスクのみ搬出完了位置に移行し、上側のディスクが筐体2の内部に取り残されている可能性がある。
【0112】
そこで、制御部401は、ST8を経過してST18に移行したときには、他の検知スイッチや光学検知素子の検知状態を確認して、筐体2の内部にまだディスクが残っているか否かを検査する動作を行う。
【0113】
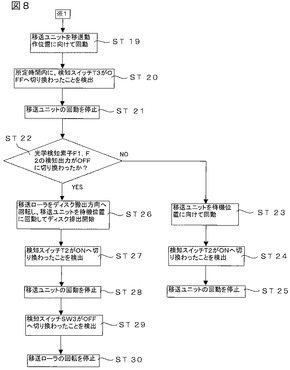
この検査動作は、まず、図5に示す検知素子Feの検知状態を確認する。検知素子Feの受光素子が光を検知していれば、選択位置の支持体21に1枚のディスクが残っており、このディスクDによって保持爪156が反時計方向へ回動させられていると判断できる。また、ST8においてディスクが取り出されたにもかかわらず、図5に示す検知部材251,252が初期位置へ復帰できずに検知スイッチSW1,SW2が共にONに切り換わらないときも、筐体2の内部にディスクが残っていると判断する。ディスクが残っていると判断したら、図8に示すST26に移行して、再度ディスクの搬出動作を行う。
【0114】
ST18においてディスクが取り出された後に、他の検知スイッチや検知素子の検知状態に異常がないとき、すなわち、筐体2の内部にディスクが残っていると明確に判断できないときは、ST19に移行して光学検知素子F1,F2を使用した検査動作を行う。
【0115】
ST19では、再度第2のモータM2を始動して図2に示す切換え部材91を(e)方向へ移動させて、移送ユニット17を反時計方向へ回動させるとともに、第3のモータM3を始動してローラ軸111をディスク搬出方向へ回動させる。もし、筐体2の内部にディスクが残っていたら、移送ユニット17の反時計方向への回動に伴って、移送ローラ112,113がディスクの表面を転動して、ディスクが移送ローラ112,113と挟持部106とで挟持される。ST20において、図3に示すように、検知スイッチSW3がONからOFFに切り換わったら、ST21で第2のモータM2を停止させる。このとき、移送ユニット17は、図3に示すように再び移送動作位置に移動して停止する。
【0116】
そして、ST22において、光学検知素子F1,F2の検知出力がONからOFFに切り換わったか否か、すなわち光学検知素子F1,F2がディスクを検知したか否か判断する。
【0117】
ST22において、光学検知素子F1,F2の検知出力がONのままであり、ディスクを検知しないときは、制御部401において筐体2の内部にディスクが残っていないと判断し、ST23において、第2のモータM2を始動し、移送ユニット17を時計方向へ回動させる。移送ユニット17が図2に示す待機位置へ復帰し、ST24において検知スイッチT2がONに切り換わったら、ST25において第2のモータM2を停止させ、次のディスクの搬入動作を待つ。
【0118】
ST22において、光学検知素子F1,F2がディスクDを検知したら、制御部401は筐体2の内部にディスクが残っていると判断し、ST26に移行する。
【0119】
ST26からST30までの搬出動作は、ST13からST18までの動作と同じである。ST26で移送ユニット17を時計方向へ回動させ、且つ移送ローラ112,113を搬出方向へ移動させ、ST27で検知スイッチT2がONになったら、移送ユニット17が待機位置に復帰したと判断して第2のモータM2を停止する。さらに、ST29において検知スイッチSW3がONからOFFに切り換わったら、第3のモータM3を停止し、ローラ軸111の回転を停止させる。
【0120】
なお、図7に示すフローチャートでは、ST7において移動ユニット17を反時計方向へ回動させている途中で、且つST9で移送ユニット17が移送動作位置に至る前の時点で、ST8で検知スイッチSW4が二度目のONになるかを監視しているが、ディスクの搬入動作中は、ST11において検知素子FeがONに切り換わるまでの間、検知スイッチSW4が二度ONになるかを監視し続けて、二度ONになったら、ST13に移行する制御を行うことが好ましい。
【0121】
(ディスク排出動作)
駆動ユニット14で駆動が完了したディスクDを、挿入口23から排出するときは次の排出動作を行う。
【0122】
図10に示すST31においてディスク排出指令31が制御部401に与えられると、駆動ユニット14の回転テーブル86の回転が停止させられる。そして、ユニット支持ベース13が持ち上げられて、回転テーブル86にクランプされているディスクDが、選択位置にある支持体21の下面に押し付けられる。その直後に、保持爪155,156,157が回動させられて、ディスクDが、支持体21の下面と保持爪155,156,157との間で保持される。
【0123】
ST32で、第2のモータM2が駆動され、切換え部材91が(e)方向へ移動させられて、移送ユニット17が待機位置から反時計方向へ回動させられ、第3のモータM3によってローラ軸111がディスク搬出方向へ回転させられる。よって、移送ローラ112,113がディスクDの面を転動しながら、移送ユニット17が図3に示す移送動作位置に向けて回動する。
【0124】
ディスクを駆動しているときは、挿入口23がシャッタで閉じられているが、移送ユニット17が待機位置から反時計方向へ回動し始めたときに、切換え部材91の(e)方向への移動に伴って、シャッタが移動させられ、挿入口23が開放される。
【0125】
移送ユニット17が図2に示す移動動作位置へ移動すると、ST33で、検知スイッチT3がONからOFFに切り換わり、第2のモータM2が停止する。このとき、回転テーブル86と支持体21の下面との間で挟まれているディスクDのY1側の端部が、移送ローラ112,113と挟持部106との間で挟持される。そして、回転テーブル86におけるディスクDのクランプが解除され、ユニット支持ベース13と駆動ユニット14が底面6に向けて下降させられて、回転テーブル86の中心凸部86bが、ディスクDの中心穴DaからZ1方向へ抜き出される。
【0126】
その後、ST34に移行して、第3のモータM3を逆回転して移送ローラ112,113をディスク搬出方向に回転させ、同時に、第2のモータM2を逆転して、切換え部材91を(d)方向へ移動させて、移送ユニット17を時計方向へ回動させる。移送ローラ112,113のディスク搬出方向への回転と、移送ユニット17の待機位置方向への回動とによって、ディスクDが挿入口23に向けて搬出される。
【0127】
ディスクDが排出される前は、検知部材251と検知部材252が、ばねによって最も接近した位置に戻っている。ディスクDが、挿入口23に向けて搬出されると、ST35において、ディスクDの外周縁によって、検知部材251がX2方向へ押され、検知部材252がX1方向へ押されて、検知スイッチSW1とSW2がONからOFFに切り換わる。ディスクDがさらにY1方向に搬出されると、ST36において、検知スイッチSW3がOFFからONに切り換わり、ST37において、検知スイッチSW4がOFFからONに切り換わる。ST37では、ディスクDの中心D0が検知部材251と検知部材252とを結ぶ線をY1方向へ通過するときに、検知スイッチSW4が短時間だけONになり、その直後にOFFになる。
【0128】
ST38では、搬出動作において検知スイッチSW4が2回ONになったか否か監視する。まず、ディスクDが搬出され、ST37において検知スイッチSW4がONになったら、これがST31以降の1回目のONなのか、2回目のONなのかを確認する。ST38において、検知スイッチSW4のONが2回目のときは、ST31で搬出動作が開始されてST37に至る前に、図9に示すように別のディスクD1が挿入口23から挿入され、そのディスクD1によって検知スイッチSW4がONに切り換えられた可能性がある。このときには、図7に示すST14に移行し、ディスクが少なくとも1枚取り出された後に、他のディスクが筐体2の内部に残っているか否かの検査が行われる。
【0129】
この検査は、ST18において、少なくとも1枚のディスクが取り出された後に、検知素子Feおよび検知スイッチSW1,SW2の出力などを確認することで行われる。あるいはST19以下の動作に移行し、移送ユニット17を反時計方向へ回動させて、光学検知素子F1,F2でディスクが残っているか否かの検査を行う。
【0130】
ST37において検知スイッチSW4のONへの切り換わりが、搬出動作を開始してから1回目である場合には、ST39以降の搬出動作を継続する。ただし、その後も、搬出動作中に、ST38において、検知スイッチSW4が2回目のONになるか否か監視する。
【0131】
SW4が2回目のONにならないときは、1枚のディスクDが正常に搬出されていると判断し、ST39において検知スイッチT2がONになったら、移送ユニット17が図2に示す待機位置に復帰したと判断し、ST40で第2のモータM2を停止する。また、ST41において、検知スイッチSW3がOFFとなったら、ディスクが搬出完了位置に至ったと判断し、ST42で第3のモータM3を停止する。
【0132】
なお、図10では、ST39において検知スイッチT2がONになるまでの間、ST38において検知スイッチSW4が2回ONになるかを監視するように図示されているが、ST38の監視は、ST41において検知スイッチSW3がOFFになるまで継続し、検知スイッチSW4が2回ONになったら、何時でもST14へ移行することが好ましい。
【0133】
なお、ディスク収納領域20内に移動している支持体21に保持されたディスクを排出するときの動作は、駆動ユニット14を図6において破線で示す退避位置へ移動させ、支持体選択手段22を動作させていずれかの支持体21を選択位置へ移動させる。そしてST31以下の動作を行う。
【0134】
なお、上記実施の形態は、筐体2の内部に複数の支持体21が収納されたディスク収納型ディスク装置について説明したが、本発明はこれには限定されず、筐体の内部に1枚のディスクのみが挿入されるディスク装置においても適用可能である。
【0135】
また、図の実施の形態では、機械式の検知スイッチSW4が外周検知部材であるが、光学式の検知素子でディスクの外周部分を検知して、この光学式の検知素子を外周検知部材として使用してもよい。
【図面の簡単な説明】
【0136】
【図1】本発明のディスク装置の全体構造を示す分解斜視図、
【図2】移送ユニットが待機位置にあるときの第2の動力伝達部を示す平面図、
【図3】移送ユニットが移送動作位置にあるときの第2の動力伝達部を示す平面図、
【図4】移送ユニットおよび第3の動力伝達部を示す部分斜視図、
【図5】ディスク装置に搭載されている検知機構を示す平面図、
【図6】ディスクの搬入動作を示す平面図、
【図7】ディスク搬入時の動作フローを示すフローチャート、
【図8】ディスク搬入時の動作フローを示すフローチャート、
【図9】ディスクの二重挿入状態を示す平面図、
【図10】ディスク排出時の動作フローを示すフローチャート
【図11】ディスク装置の回路ブロック図、
【符号の説明】
【0137】
1 ディスク装置
2 筐体
12 第1の動力伝達部
14 駆動ユニット
16 第2の動力伝達部
17 移送ユニット
19 第3の動力伝達部
21 支持体
22 支持体選択手段
23 挿入口
82 回転駆動部
106 挟持部
112,113 移送ローラ
251,252 検知部材
F1,F2 光学検知素子(挿入口側検知部材)
Fe 検知素子(装填完了検知部材)
SW4 検知スイッチ(外周検知部材)
【技術分野】
【0001】
本発明は、筐体の挿入口から挿入されたディスクが搬送機構によって装填完了位置に移送され、また装填完了位置のディスクが搬送機構によって挿入口から排出されるディスク装置に係り、特に、誤ってディスクが二重挿入されたことを検知できるディスク装置に関する。
【背景技術】
【0002】
車載用などのディスク装置は、筐体の前面にスリット状の挿入口が開口しており、挿入口の内側には移送ローラを有する搬送機構が設けられている。挿入口から挿入されたディスクは、移送ローラの回転力によって筐体の内部に移送され、筐体の内部に設けられた回転駆動部にクランプされる。
【0003】
あるいは、特許文献1に記載のディスク収納型ディスク装置では、筐体内に、それぞれがディスクを保持する支持体(トレイ)がディスクの厚み方向に重ねられて配置されている。筐体内には、支持体選択手段が設けられ、この支持体選択手段によっていずれかの支持体が選択される。挿入口から挿入されたディスクは、移送ローラによって筐体内に搬入されて、選択された支持体に供給されて保持される。
【0004】
この種のディスク装置では、挿入口から挿入されたディスクや筐体内のディスクを検知するために、センサやスイッチが設けられている。特許文献2に記載のディスク装置では、筐体内に、挿入口から挿入されるディスクを検知する複数のセンサおよびスイッチが設けられている。
【特許文献1】特開2001−307406号公報
【特許文献2】特開2002−279716号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
筐体にスリット状の挿入口が開口した、いわゆるスロットインタイプのディスク装置は、ディスクが筐体の内部に搬入されている途中で、誤って他のディスクが挿入口から挿入されると、最初のディスクと共に後続のディスクが搬送機構に挟持されて筐体の内部に向けて一緒に搬入されることがあり得る。このとき、センサやスイッチが二枚のディスクを途切れることなく検知すると、制御部は1枚のディスクが搬入されているのと同じ制御動作を行うことになり、先行するディスクが既に筐体内の所定位置に搬入されているにもかかわらず搬送機構が搬入動作を継続するという問題がある。
【0006】
逆に、筐体内から挿入口へディスクを搬出している途中で、誤って他のディスクが挿入口から挿入され、他のディスクが搬出中のディスクと共に搬送機構で挟持されると、移送ローラに接しているいずれか一方のディスクだけが挿入口に送り出され、他方のディスクが筐体の内部に取り残されることがある。この場合に、送り出された一方のディスクが挿入口から抜き出されたことがセンサやスイッチで検知された時点で、制御部がディスクの排出を完了したと判断し、制御動作がリセットされてしまう。よって、その後に、筐体内にディスクが存在しているにもかかわらず、さらに他のディスクを受け付けてしまったり、あるいは筐体内で他のディスクを選択する選択動作が開始されるなどの問題がある。
【0007】
本発明は上記従来の課題を解決するものであり、ディスクの搬入時や搬出時に、挿入口から別のディスクが挿入されたときに、その異常を正確に認識でき、全てのディスクを排出するなどの対処が可能なディスク装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
第1の本発明は、筐体に開口する挿入口と、前記挿入口から挿入されたディスクを前記筐体内の装填完了位置へ向けて搬送する搬送機構とを有するディスク装置において、
前記挿入口から挿入されたディスクが前記装填完了位置に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬入動作を開始した後に、前記外周検知部材が2回検知状態となったときに、前記搬送機構を逆転させてディスクの排出動作に移行することを特徴とするものである。
【0009】
本発明のディスク装置は、ディスクの外周位置を検知する外周検知部材を使用して、ディスクの二重挿入を検知している。外周検知部材は、挿入口から挿入されたディスクの直径が所定の値を超えているか否かを判断することで、直径が規定よりも小さいディスクが筐体の内部に入り込むことを防止するための機能も分担している。制御部がこの外周検知部材の検知動作を監視し、ディスクの挿入動作中に2回検知状態となったらディスクの二重挿入であると判断する。この判断により、ディスクの二重挿入を高い確率で認識でき、直ちにディスクを搬出させる動作に移行できる。
【0010】
また、第1の本発明は、ディスクの搬出動作が完了した後に、他のディスクが前記筐体内に残っているか否かの確認動作を行うものである。
【0011】
この確認動作を行うことにより、二重挿入が行われたときに、筐体の内部にディスクが残る現象をさらに確実に防止できるようになる。
【0012】
第2の本発明は、筐体に開口する挿入口と、前記筐体内の装填完了位置に有るディスクを前記挿入口へ向けて搬送する搬送機構とを有するディスク装置において、
ディスクが前記装填完了位置から前記挿入口に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬出動作を開始した後に、前記外周検知部材が2回検知状態となったときに、ディスクの搬出動作を完了させるとともに、その完了後に、他のディスクが前記筐体内に残っているか否かの確認動作を行うことを特徴とするものである。
【0013】
第2の本発明では、ディスクを搬出しているときに他のディスクが挿入口から挿入されたときに、二枚のディスクが搬出されたか否かを確認できる。
【0014】
また、第1の本発明および第2の本発明において、前記確認動作により、前記筐体内に他のディスクが残っていることが検知されたときに、再度搬出動作が行われることが好ましい。
【0015】
上記制御により、二重挿入があったときに二枚のディスクを確実に搬出できる。
本発明は、前記確認動作は、前記外周検知部材以外の他の検知部材を用いて行われる。
【0016】
例えば、前記挿入口の内側に、ディスクが前記筐体の外へ取り出されたことを検知する挿入口側検知部材が設けられており、
前記挿入口側検知部材が前記他の検知部材として使用され、この挿入口側検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われる。
【0017】
この場合に、前記挿入口側検知部材は、移動するユニットに搭載されており、前記確認動作では、前記ユニットと共に前記挿入口側検知部材が、前記挿入口側から前記装填完了位置に向けて移動することが好ましい。
【0018】
あるいは、本発明は、前記装填完了位置に、ディスクを検知する装填完了検知部材が設けられており、
前記装填完了検知部材が前記他の検知部材として使用され、この装填完了検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われるものであってもよい。
【発明の効果】
【0019】
本発明のディスク装置は、ディスクの搬入時や搬出時に、挿入口から別のディスクが挿入されたときに、二重挿入が行われたことを高い精度で検知できる。また、二重挿入が行われたと判断した後は、排出すべき二枚のディスクを確実に排出して、ディスク装置の制御動作を正常な状態に戻すことが可能になる。
【発明を実施するための最良の形態】
【0020】
図1は本発明のディスク装置の全体構造を示す分解斜視図、図2と図3は第2の動力伝達部の構造を動作別に示す平面図、図4は移送ユニットの部分斜視図、図5はディスク装置に搭載されている種々の検知機構を示す平面図である。図6以下は動作説明図、図11は回路ブロック図である。
【0021】
図1に示すディスク装置1は箱型の筐体2を有している。図1において、筐体2の基準方向は、図示Z1側が下側、Z2側が上側、X1側が左側、X2側が右側、Y1側が手前側、Y2側が奥側である。また、図示X1−X2方向が横方向、Y1−Y2方向が奥行き方向(前後方向)である。
【0022】
筐体2は下側から上側に向けて下部筐体3、中間筐体4および上部筐体5が順に重ねられて組み立てられている。下部筐体3は筐体2の底面6を有し、中間筐体4は筐体2の前面7と右側面8を有している。上部筐体5は筐体2の左側面9と後面10および天井面11を有している。
【0023】
下部筐体3の底面6の上面には第1の動力伝達部12が設けられている。第1の動力伝達部12の上にはユニット支持ベース13が支持され、ユニット支持ベース13の上に駆動ユニット14が搭載されている。中間筐体4の上部には、底面6と平行な機構ベース15が設けられ、機構ベース15の上に第2の動力伝達部16が設けられている。
【0024】
上部筐体5は、左側面9と後面10および天井面11で囲まれた領域がディスク収納領域20となっており、ディスク収納領域20に、それぞれがディスクDを支持可能な複数の支持体21が厚み方向(図示Z1−Z2方向)に6枚重ねられて配置されている。上部筐体5には支持体選択手段22が設けられており、支持体選択手段22の動作により、6枚の支持体21のいずれかが選択されて選択位置に移動させられるとともに、選択された支持体21とその下に隣接する支持体21との間隔が広げられる。
【0025】
ディスクDは、直径が12cmであり、例えばCD(コンパクト・ディスク)、CD−ROM、DVD(ディジタル・バーサタイル・ディスク)などである。
【0026】
図1に示すように、筐体2の前面7には挿入口23が開口している。挿入口23はスリット状であり、上下方向の幅寸法がディスクDの厚み寸法よりもわずかに大きく、横方向の開口幅寸法WがディスクDの直径よりもわずかに広い。
【0027】
中間筐体4には、機構ベース15の下側で且つ前面7の内側に移送ユニット17が設けられている。図1と図4に示すように、移送ユニット17の図示X1側の端部と、下部筐体3の底面6との間に、第3の動力伝達部19が設けられている。第3の動力伝達部19はローラ駆動手段として機能している。
【0028】
移送ユニット17は挿入口23と同じ高さ位置にあり、挿入口23から挿入されたディスクDが、移送ユニット17によってディスク収納領域20に向けて移送される。複数枚の支持体21のうちの、選択位置に至った支持体21は、挿入口23と同じ高さ位置となり、挿入口23から挿入されたディスクDは、移送ユニット17で移送されて、選択位置にある支持体21の下面に供給されて保持される。この実施の形態では、選択位置にある支持体21にディスクDが保持されたときが、ディスクDの装填完了位置である。
【0029】
図1に示すように、下部筐体3の底面6上の3箇所に、弾性支持部材であるダンパー71,72,73が固定されている。ダンパー71,72,73は、ゴムなどの可撓性の袋体の内部に、オイルなどの液体または気体が封入されているものである。
【0030】
ユニット支持ベース13の底面には支持軸が下方に向けて垂直に固定されており、各支持軸がダンパー71,72,73に支持されて、ユニット支持ベース13は、各ダンパー71,72,73によって、筐体2の底面6上で弾性支持可能となっている。
【0031】
図1に示すように、駆動ユニット14は、細長い駆動ベース81を有している。ユニット支持ベース13の奥側には支持軸84が上向きに垂直に突出しており、駆動ベース81が支持軸84に支持されて、駆動ユニット14がX−Y平面に沿って回動自在となっている。
【0032】
下部筐体3の底面6の上面には、第1の動力伝達部12を動作させる第1のモータM1(図11参照)が設けられている。第1の動力伝達部12では、第1のモータM1の動力がピニオン歯車85を介してラック部材87に伝達されて、ラック部材87がY1−Y2方向へ移動する。ラック部材87のY1方向への移動力はユニット駆動部材89に伝達される。ユニット駆動部材89にはZ2方向へ起立した駆動ピン88が設けられている。ラック部材87およびユニット駆動部材89と共に駆動ピン88がY1方向へ移動するときに、駆動ピン88の移動力によって、駆動ユニット14が、図6において点線で示す退避位置から、同じく図6において実線で示す介入位置まで回動させられる。
【0033】
図1に示すように、駆動ユニット14の回動自由端側には回転駆動部82が設けられている。回転駆動部82は、駆動ベース81の回動自由端側の上面にスピンドルモータが固定され、このスピンドルモータのモータ軸に回転テーブル86が固定されている。回転テーブル86には、ディスクDの下面が設置される円盤状の支持面86aと、この支持面86aの中心部から上方へ突出してディスクDの中心穴内に介入する凸部86bとが一体に形成されている。駆動ベース81には光ヘッド83が設けられており、光ヘッド83の上面に対物レンズ83aが設けられている。光ヘッド83は互いに平行に配置された一対の案内部材(図示せず)によって案内されて移動し、このとき対物レンズ83aが、回転テーブル86に支持されたディスクDの記録面に沿って移動する。
【0034】
図2と図3に示す第2の動力伝達部16は、機構ベース15の上に、円弧形状の切換え部材91が設けられている。切換え部材91には、円弧軌跡に沿って延びる一対の案内長穴91a,91aが形成されている。機構ベース15上には一対の案内軸92,92が上向きに突出して固定されており、それぞれの案内軸92が案内長穴91a内に挿入されている。この支持機構により、切換え部材91は円弧軌跡に沿って図示(d)方向および(e)方向へ摺動自在に案内されている。また、切換え部材91の外周側の縁部には円弧軌跡に沿ってラック歯91bが形成されている。
【0035】
機構ベース15上には、第2のモータM2が設けられている。第2のモータM2の回転軸にはウォーム歯車93が固定されている。機構ベース15上には出力歯車94が設けられ、出力歯車94がウォーム歯車93に常に噛み合っている。
【0036】
第2のモータM2の回転動力は、出力歯車94から歯車95,96を経てピニオン歯車97に減速して伝達される。ピニオン歯車97は、切換え部材91のラック歯91bと常に噛み合っている。
【0037】
出力歯車94の側方には伝達歯車99および切換え歯車98が設けられている。機構ベース15上には、切換え歯車98を、出力歯車94および伝達歯車99の双方に噛み合う位置と、伝達歯車99から離れる位置との間で切換える切換え手段(図示せず)が設けられている。この切換え手段は、第1の動力伝達部12に設けられた第1のモータM1の動力によって動作させられる。切換え歯車98が出力歯車94と伝達歯車99の双方に噛み合ったときに、第2のモータM2の動力は、伝達歯車99を経て、図1に示す支持体選択手段22に伝達される。
【0038】
機構ベース15の下には、ディスクの搬送機構として機能する移送ユニット17が設けられている。移送ユニット17は、図示X1−X2方向へ向けて細長く延びる金属製のユニット枠100を有している。
【0039】
図4に示すように、ユニット枠100は、上面101と下面102および支点側の側面103と自由端側の側面を有し、ユニット枠100の内部は図示Y1−Y2方向に貫通している。ユニット枠100の内部には、低摩擦係数の合成樹脂で形成された摺動部材105が設けられている。摺動部材105は、ユニット枠100の上面101の内面に沿って延びる挟持部106と、支点側の側面103の内側に位置する側部案内部107と、自由端側の側面の内側に位置する側部案内部とを有している。側部案内部どうしの対向間隔は、ディスクDの直径よりも広く、挿入口23の開口幅寸法とほぼ同じか、それよりもやや広く形成されている。
【0040】
図4に示すように、移送ユニット17では、ユニット枠100内にローラ軸111が設けられている。ローラ軸111は、ユニット枠100の上面101と平行に延び、その両端は支点側の側面103と自由端側の側面に回転自在に支持されている。図4と図5にも示されるように、ローラ軸111の外周に合成ゴムや天然ゴムなどの摩擦係数の高い材料で形成された第1の移送ローラ112と第2の移送ローラ113が設けられている。移送ローラ112と移送ローラ113は、軸方向に間隔を空けて配置されている。移送ユニット17が図2と図6に示す待機位置にあるとき、移送ローラ112と113は、筐体2の前面7とほぼ平行で、且つディスク挿入中心から左右に等距離離れた位置に配置されている。
【0041】
第1の移送ローラ112と第2の移送ローラ113との中間に位置する中間部114は、ディスクDに対して実質的に移送力を与えない部分である。中間部114は、ローラ軸111が直接に露出して形成されている。
【0042】
第1の移送ローラ112と第2の移送ローラ113は、摺動部材105の挟持部106に対向している。移送ローラ112,113と挟持部106の少なくとも一方がばねで付勢されて、移送ローラ112,113と挟持部106とが互いに弾性的に圧接されている。よって、移送ローラ112と挟持部106、および移送ローラ113と挟持部106とでディスクDを挟持可能である。なお、この圧接状態では、中間部114と挟持部106との隙間が、ディスクDの厚み寸法よりも広くなっており、中間部114と挟持部106との間でディスクDが挟持されることはない。
【0043】
第1の移送ローラ112および第2の移送ローラ113は、ローラ軸111の外周に接着することなくローラ軸111の外周に回転自在に挿通されている。ディスクDに対する挟持圧が移送ローラ112,113に作用しているときには、移送ローラ112,113とローラ軸111との摩擦力が増大して、ローラ軸111と移送ローラ112,113が一体となって回転する。また、挟持中のディスクDが人の指で掴まれたときのように、移送されるディスクDに大きな抵抗力が与えられると、移送ローラ112,113に対してローラ軸111がスリップ回転できるように構成されている。
【0044】
図1と図4に示すように、移送ユニット17の回動支点となる支点軸131は、下部筐体3の底面6において、上方へ垂直に延びるように固定されている。図4に示すように、移送ユニット17には、図示X1側の端部にローラ軸111と直交する方向に延びる軸受部125が設けられており、軸受部125が支点軸131に回動自在に支持されている。
【0045】
図2と図3に示すように、移送ユニット17のY2側の端部には、ユニット枠100の上面からZ2方向へ突出する駆動ピン121が固定されている。機構ベース15には、支点軸131を中心とする円弧軌跡に沿って形成された案内長穴15aが開口しており、駆動ピン121は、案内長穴15aを通過して機構ベース15の上方へ突出している。
【0046】
第2の動力伝達部16は、機構ベース15の上に、軸123を支点として回動する回動レバー122が設けられている。回動レバー122は機構ベース15と切換え部材91との間に挟まれて位置している。回動レバー122には駆動長穴122aが開口しており、駆動ピン121は駆動長穴122a内に摺動自在に挿通されている。
【0047】
図2と図3に示すように、切換え部材91には切換えカム穴124が形成されている。回動レバー122の上面には、軸123と駆動長穴122aとの間に制御ピン126が固定されており、この制御ピン126が切換えカム穴124内に摺動自在に挿通されている。
【0048】
切換えカム穴124には、切換え部材91の移動軌跡である円弧軌跡に沿って延びる逃げ部124aと、この逃げ部124aの(d)側の端部からX1方向へ屈曲する駆動部124bとが一体に形成されている。
【0049】
第2の動力伝達部16では、切換え部材91が(d)側の移動始端に位置している状態から(e)方向へ移動する移動行程の前半において、切換えカム穴124の逃げ部124aが制御ピン126と摺動するために、移送ユニット17が待機位置に停止している。図2および図6に示すように、待機位置では、ユニット枠100が、筐体2の前面7の内側に位置し、ローラ軸111がほぼ図示X1−X2方向へ延びている。また、待機位置にある移送ユニット17は、ユニット枠100が、支持体21に支持されているディスクDの外周縁からY1方向へわずかに離れている。
【0050】
切換え部材91が、図2に示す位置からさらに(e)方向へ回動すると、切換えカム穴124の駆動部124bによって、制御ピン126が(e)方向へ押され、図3および図5に示すように、移送ユニット17が待機位置から反時計方向へ回動して、移送動作位置に至る。
【0051】
図1と図4に示すように、第3の動力伝達部19では、下部筐体3の底面6に固定された支点軸131の下方に、一体ギヤ141が回転自在に挿通されている。一体ギヤ141は、上方部分が垂直に延びるウォーム歯車141aであり、下方部分が下部歯車141bである。図1に示すように、底面6には中間歯車142が回転自在に設けられ、中間歯車142が下部歯車141bに噛み合っている。底面6には第3のモータM3(図11参照)が設けられており、その回転軸に固定されたウォーム歯車が中間歯車142と噛み合っている。
【0052】
図4に示すように、移送ユニット17は、ローラ軸111の一端が、ユニット枠100の支点側の側面103から外方へ突出しており、側面103から突出したローラ軸111の端部に平歯車であるローラ歯車144が固定されている。側面103には軸145が固定され、軸145に一体ギヤ146が回転自在に支持されている。一体ギヤ146は、小径平歯車146aと大径平歯車146bとが一体化されたものであり、小径平歯車146aがローラ歯車144と噛み合っている。
【0053】
ユニット枠100の下面102に、下方へ突出する支持片102aが一体に折り曲げ形成されており、支持片102aに軸148が固定されている。軸148はローラ軸111と平行に延びている。軸148には一体ギヤ147が回転自在に支持されている。一体ギヤ147は平歯車147aとウォームホイール147bとが一体化されたものである。平歯車147aが大径平歯車146bと噛み合っている。
【0054】
移送ユニット17に設けられた軸受部125が支点軸131に回動自在に挿通された状態で、ウォームホイール147bとウォーム歯車141aとが噛み合う。第3のモータM3の回転動力は、中間歯車142から下部歯車141bおよびウォーム歯車141aに伝達され、さらにウォーム歯車141aからウォームホイール147bに伝達される。その動力は、平歯車147aから一体ギヤ146の大径平歯車146bに伝達され、さらに小径平歯車146aからローラ歯車144に伝達される。
【0055】
第3のモータM3の回転動力が、支点軸131と同軸に回転する一体ギヤ141を介してローラ歯車144に伝達されるため、移送ユニット17を、支点軸131を支点として待機位置から移送動作位置へ回動させる動作と独立させて、ローラ軸111を駆動することができる。
【0056】
図2と図3に示すように、機構ベース15上には、切換え部材91の摺動位置を検知するための摺動検知手段300が設けられている。
【0057】
摺動検知手段300は検知基板301Aを有し、検知基板301Aに検知スイッチ(検知部材)T1,T2,T3,T4が取り付けられている。筐体2の前面7から図示Y2側へ曲げられた取り付け部7a,7bが設けられ、検知基板301Aは、取り付け部7a,7bにねじで固定されている。検知基板301Aはプリント基板であり、その表面に所定の配線パターンがスクリーン印刷等により形成されている。検知スイッチT1〜T4の動作信号が、配線パターンを経てCPUなどの制御部401(図11参照)に与えられる。検知スイッチT1,T2,T3,T4は、Y2方向へ突出する押圧式のアクチュエータT11,T21,T31,T41を有している。
【0058】
切換え部材91の上面には、その円弧形状に沿って延びる検知カム302が固定されて、検知カム302が切換え部材91とともに円弧軌跡に沿って(d)―(e)方向に移動する。
【0059】
切換え部材91が(d)方向の移動終端にあるとき、検知カム302によって、全てのアクチュエータT11〜T41が押され、検知スイッチT1,T2,T3,T4は全てONである。切換え部材91が(d)方向の移動終端から(e)方向へ向けて移動すると、検知カム302が、アクチュエータT11,T21,T31,T41から順番に離れ、検知スイッチがT1,T2,T3,T4の順にONからOFFに切り換わる。
【0060】
図11に示すように、検知スイッチT1ないしT4の検知出力は、スイッチ検出回路402で個別に検知されて制御部401に与えられる。制御部401では、検知スイッチT1がONのときに切換え部材91が(d)方向の移動終端に至ったと認識する。その後、切換え部材91が(e)方向へ移動するときに、検知スイッチT2がONからOFFとなったときに、移送ユニット17が図2と図6に示す待機位置から、反時計方向へ回動し始めたことを認識し、検知スイッチT3がONからOFFとなったときに、移送ユニット17が図3と図5に示す移送動作位置に至ったものと認識する。検知スイッチT4がONからOFFになったときに、切換え部材91が(e)方向の移動終端に至ったと判断する。
【0061】
図1に示すディスク収納領域20に設けられた支持体選択手段22では、上部筐体5の天井面11に、互いに平行に下方へ向けて延びる3本の選択軸151が回転自在に支持されている。天井面11には、全ての選択軸151を同期して回転させる大径歯車(図示せず)が設けられており、図2と図3に示す伝達歯車99がこの大径歯車に噛み合っている。第2の動力伝達部16において切換え歯車98が出力歯車94と伝達歯車99に噛み合っているときに、第2のモータM2が動作すると、その回転力が伝達歯車99から大径歯車に伝達され、3本の選択軸151が駆動される。この間、切換え部材91に形成された切換えカム穴124の逃げ部124aが制御ピン126と摺動するため、移送ユニット17が回動させられることはない。逆に、切換えカム穴124の駆動部124bで回動レバー122が駆動され、移送ユニット17が回動させられるときは、切換え歯車98が伝達歯車99から離れ、第2のモータM2の動力は伝達歯車99に伝達されない。
【0062】
3本の選択軸151には、それぞれ螺旋状の選択溝152が形成されており、それぞれの選択溝152は、選択軸151の上端と下端で螺旋ピッチが密になり、選択軸151の中間部で螺旋ピッチが疎になっている。個々の支持体21には3個ずつの軸受部が設けられ、それぞれの軸受部が選択軸151の外周に摺動自在に装着されている。そして、軸受部に設けられた係合部が選択溝152に摺動自在に挿通されている。3本の選択軸151が同期して回転すると、それぞれの支持体21が順番にZ1方向へ送られ、または順番にZ2方向へ送られる。選択された支持体21が選択軸151のほぼ中央部に至ったときに選択動作が終了し第2のモータM2が停止する。このとき、選択された支持体21は、挿入口23と同じ高さ位置で停止し、選択された支持体21とその下の支持体21との間隔が広げられ、上下の支持体21の間に駆動ユニット14が入り込めるようになる。
【0063】
図6に示すように、個々の支持体21には、保持爪155,156,157が設けられている。この保持爪155,156,157は、支持体21に設けられた前記軸受部の周囲を回動できるように支持されている。保持爪155,156,157は支持体21の下面に設けられ、それぞれが、図6に示すようにディスクを保持できる姿勢に向けてばねで付勢されている。挿入口23に挿入され、移送ユニット17によって移送されたディスクDは、選択位置にある支持体21の下面に供給され、この下面と保持爪155,156,157とで保持される。筐体2の内部には保持解除機能が設けられており、選択位置の支持体21に支持されたディスクDの中心穴Daが、駆動ユニット14の回転テーブル86にクランプされると、前記保持解除機構によってそれぞれの保持爪155,156,157が退避位置に回動させられて、支持体21でのディスクDの保持が解除される。
【0064】
筐体1の前面7の内側には、挿入口23を開閉する蓋部材であるシャッタが摺動自在に設けられている。切換え部材91に形成された切換えカム穴124の逃げ部124aが制御ピン126と摺動している範囲で、切換え部材91が(d)−(e)方向へ移動して、支持体21の選択動作が行われているときは、シャッタで挿入口23が閉鎖されている。選択された支持体21が選択位置へ移動すると、切換え歯車98が伝達歯車99から離れて、支持体21の選択動作が完了するが、その後に、切換え部材91が(e)方向へ移動すると、切換えカム穴124の駆動部124bが制御ピン126と係合する直前に、切換え部材91の移動力によりシャッタが駆動され、挿入口23が開放される。
【0065】
図5に示すように、筐体2の内部では、左側面9と後面10との角部に装填完了検知部材である検知素子Feが設けられている。この検知素子Feは、筐体2内に1箇所だけ設けられ、選択位置に移動した支持体21と同じ高さ位置に配置されている。検知素子Feは、発光素子と受光素子とが対向して設けられている。
【0066】
図5に示すように、それぞれの支持体21に設けられた保持爪156には、腕部202が一体に形成され、その先部に遮光部203が設けられている。保持爪156は前記ばねにより時計方向へ付勢され、ディスクDを保持していないときは時計方向へ回動している。よって、選択位置に至った支持体21がディスクDを保持していないときは、遮光部203が、発光素子と受光素子との間に介入し、受光素子に向かう光が遮られる。また、選択位置の支持体21の下面にディスクDが供給されると、ディスクDの外周縁によって保持爪156が反時計方向へ回動させられ、遮光部203が発光素子と受光素子との間から抜き出て、受光素子が受光状態となる。
【0067】
図11に示すように、検知素子Feの検知出力は光学検出回路403で検出されて制御部401に与えられる。制御部401では、検知素子Feからの検出信号によって、選択位置に至った支持体21にディスクDが装填されているか否かを認識できる。また、空の支持体21が選択位置で停止しているときに、挿入口23から挿入されたディスクDが、支持体21に保持されたか否か、すなわち、ディスクDが装填完了位置に至ったか否かを認識できる。
【0068】
図5と図6に示すように、移送ユニット17のユニット枠100には、挿入口側検知部材である一対の光学検知素子F1,F2が設けられている。光学検知素子F1,F2は、移送ユニット17のX1−X2方向の寸法の中心を挟んでX1側とX2側に等距離を空けて設けられている。すなわち、図6に示すように、光学検知素子F1と光学検知素子F2は、挿入口23から挿入されたディスクDの中心D0が通過する通過線Oから左右に均等に離れて位置している。
【0069】
それぞれの光学検知素子F1,F2は、図4に示すユニット枠100の上面101と下面102の一方に発光素子が他方に受光素子が設けられたものである。ディスクDが移送ユニット17内に入り込んでいないときは、発光素子からの光が受光素子で受光される。図6に示すように、挿入口23からディスクDが挿入されると、ディスクDが移送ローラ112,113に当たる前に、ディスクDのY2側の先端が光学検知素子F1,F2と重なる位置となり、受光素子への光が遮られる。
【0070】
図11に示すように、光学検知素子F1,F2の検知出力は、光学検出回路403で検知されて制御部401に与えられる。図6に示すように、移送ユニット17が待機位置にあるときに、光学検知素子F1,F2の少なくとも一方がディスクを検知したときに、制御部401はディスクDが挿入されたと認識し、ディスクの搬入動作に移行する。
【0071】
図5に示すように、筐体2の前面7と、待機位置にある移送ユニット17との間に、一対の検知部材251と252が設けられている。検知部材251と252は、垂直に延びる検知ピンであり、それぞれの検知部材251,252は、筐体2の内側において、挿入口23を上下に横断している。一方の検知部材251は、X1−X2方向に延びる検知板253に固定され、他方の検知部材252は、X1−X2方向に延びる検知板254に固定されている。検知板253と検知板254は、筐体2の前板7の内面に沿ってX1−X2方向へ互いに独立して移動可能である。そして、検知板253と検知板254は互いに接近する方向へばねで付勢されている。
【0072】
図6に示すように、ディスクDが挿入口23から挿入されていないとき、検知部材251と検知部材252は、挿入されるディスクDの中心D0の通過線OからX1方向とX2方向へ同じ距離だけ離れている。このときの検知部材251と検知部材252の間隔は、8cmよりもやや広く設定されている。よって、挿入口23から、誤って直径が8cmの小径ディスクが挿入されたときに、検知部材251と検知部材252が同時に互いに離れる方向へ移動させられることがない。そして、直径が12cmのディスクDが挿入口23から挿入されると、このディスクDの外周縁が検知部材251と検知部材252と摺動し、検知部材251と検知部材252が、通過線Oから離れる方向へ移動させられる。
【0073】
筐体2内には、一方の検知板253によって動作させられる機械動作式の検知スイッチSW1,SW3,SW4と、他方の検知板254によって動作させられる同じく機械動作式の検知スイッチSW2が設けられている。図11に示すように、検知スイッチSW1,SW2,SW3,SW4の切換え出力は、スイッチ検出回路402で個別に検出されて制御部401に与えられる。
【0074】
挿入口23からディスクDが挿入される前は、検知部材251と検知部材252が、前記ばねによって最も接近した初期位置にある。このとき、検知板253によって検知スイッチSW1がONに切換えられており、検知板254によって検知スイッチSW2がONに切換えられている。
【0075】
直径が12cmのディスクDが筐体2内に搬入されると、ディスクDの外周縁によって、検知部材251がX2方向へ押され、検知部材252がX1方向へ押されて、検知スイッチSW1とSW2が直ちにOFFになる。制御部401では、光学検知素子F1,F2がディスクの挿入を検知したときに搬入動作を開始するが、その後の所定時間以内に検知スイッチSW1とSW2が共にOFFになったことを検出することで、直径が8cmの小径ディスクではなく、直径が12cmのディスクDが搬入されている確率が高いものと判断して、そのまま搬入動作を継続する。
【0076】
搬入されているのが直径が12cmの正規のディスクDであるときは、ディスクDの中心D0が、検知部材251と検知部材252とを結ぶ線上に至ると、検知部材251がX2方向へ最も長い距離移動させられ、検知板253によって検知スイッチSW4が短時間だけOFFからONに切換えられる。制御部401は、光学検知素子F1,F2がディスクの挿入を検知し、搬入動作に移行してから所定時間以内に検知スイッチSW4が短時間だけON(ディスク検知状態)となったときに、搬入されているのが直径12cmの正規のディスクである確率がさらに高いと判断し、ディスクの搬入動作を継続する。
【0077】
なお、前記所定時間以内に検知スイッチSW4がONにならなかったときは、ディスクの搬入動作を中止し、搬出動作に移行して、ディスクなどを挿入口23から排出する。
【0078】
よって、検知スイッチSW4は、挿入されるディスクDの中心D0が通過する通過線Oから一番離れた位置にある外周検知部材である。この実施の形態では、検知スイッチSW4によって、搬入時や搬出時にディスクDが二重挿入されたか否かを検知できるようにしている。
【0079】
ディスクDが選択された支持体21に保持される装填完了位置に至ると、ディスクDは検知部材251,252から離れ、検知部材251と検知部材252が初期位置へ復帰する。そして、検知スイッチSW1とSW2が再びOFFからONに切換えられる。
【0080】
筐体2内にあるディスクDが挿入口23から排出されるときは、ディスクDのY1側に向く外周縁によって検知部材251がX2方向へ移動させられ、検知部材252がX1方向へ移動させられる。このとき、検知スイッチSW1とSW2がONからOFFになり、さらにディスクDが搬出される過程で、検知スイッチSW3がONになり、検知スイッチSW4が短時間ONになる。ディスクDの中心D0が、検知部材251と検知部材252を結ぶ線よりもY1側へ移動すると、検知スイッチSW4が直ちにOFFになり、さらにディスクDがY1方向へ移動すると、検知スイッチSW3がONからOFFに切り換わる。
【0081】
制御部401は、ディスクの搬出過程において、検知スイッチSW3がONからOFFに切り換わったときに、搬出動作を停止させる。移送ローラ112,113の回転を停止させることにより、ディスクDはその一部が筐体2の内部に保持されている状態で、排出動作を停止させることができる。
【0082】
図11に示すように、各検知スイッチSW1,SW2,SW3,SW4および各検知スイッチT1,T2,T3,T4の検知出力はスイッチ検出回路402で個別に検出されて制御部401に与えられる。また、光学検知素子F1,F2および検知素子Feの検知出力は、光学検出回路403で個別に検出されて制御部401に与えられる。
【0083】
図1に示す第1の動力伝達部12の駆動源である第1のモータM1を駆動するモータドライバ404は制御部401で制御される。図2に示す第2の動力伝達部16の動力源である第2のモータM2を駆動するモータドライバ405、および図4に示す第3の動力伝達部19の駆動源である第3のモータM3を駆動するモータドライバ406も制御部401で制御される。
【0084】
次に、本発明のディスク装置1の動作について説明する。
図6は、ディスクの搬入動作を示す平面図、図7と図8は、ディスクの搬入動作時の制御フローを示すフローチャートである。図9は、ディスクの搬出動作を示す平面図、図10は、ディスクの排出動作時の制御フローを示すフローチャートである。図7,図8,図10に示すフローチャートでは、各制御動作のステップを「ST」で示している。
【0085】
(ディスク挿入待機モード)
ディスクDの挿入を待機するホームポジションは、図6にて実線で示すように、駆動ユニット14がディスク収納領域20内に介入する介入位置にあり、移送ユニット17が筐体2の前面7の内側に沿う待機位置にある。
【0086】
筐体2の前面7を覆う化粧部に設けられた操作部を操作し、あるいはリモートコントローラを操作して、複数の支持体21のいずれかを指定する操作を行うと、制御部401によってモータドライバ404が制御され、図1に示す第1の動力伝達部12の駆動源である第1のモータM1が始動し、ラック部材87がY2方向へ駆動される。ラック部材87およびユニット駆動部材89がY2方向へ移動すると、ユニット駆動部材89に設けられた駆動ピン88によって、駆動ユニット14が、図6において実線で示す介入位置から点線で示す退避位置へ回動させられる。
【0087】
そして、図2に示す第2の動力伝達部16の駆動源である第2のモータM2が始動して、支持体21の選択動作が行われる。このとき、第2のモータM2の回転力は出力歯車94から歯車95,96を介してピニオン歯車97に与えられるため、切換え部材91が(d)方向または(e)方向へ回動する。ただし、このとき、回動レバー122に設けられた制御ピン126が切換えカム穴124の逃げ部124a内を摺動するため、回動レバー122が動くことなく、第2のモータM2の動力は、出力歯車94から切換え歯車98を介して伝達歯車99に伝達され、図1に示す支持体選択手段22の3本の選択軸151が駆動される。
【0088】
選択軸151が時計方向または反時計へ回転すると、選択軸151に形成された螺旋状の選択溝152によって、支持体21が上方向または下方向へに移動させられ、指定した空の支持体21が選択位置に至る。支持体21が選択位置に至ったときに、第2のモータM2が停止して支持体21の選択動作を終了する。その後、第1のモータM1の動力によって、第1の動力伝達部12のラック部材87がY1方向へ移動させられ、駆動ピン88によって、図6において、駆動ユニット14が、点線で示す退避位置から実線で示す介入位置へ回動させられて、再びホームポジションが設定される。
【0089】
このホームポジションでは、ユニット支持ベース13は、筐体2の底面6に接近するように下降した姿勢で保持されている。よって、ユニット支持ベース13に搭載されている駆動ユニット14の回転駆動部82が、選択位置にある支持体21から下方へ離れた位置で停止している。
【0090】
なお、切換え部材91が(d)−(e)方向へ移動して支持体21の選択動作が行われているときは、挿入口23はシャッタで閉鎖されている。指定した支持体21が選択位置へ移動した後に、図2に示す切換え歯車98が伝達歯車99から離れて支持体選択手段22への動力が絶たれた後に、第2のモータM2によって、切換え部材91が(e)方向へ駆動される。このとき、制御ピン126が切換えカム穴124の逃げ部124aの(d)側の端部に至り且つ検知スイッチT2がONからOFFに切換えられた時点で、切換え部材91によってシャッタが移動させられて、挿入口23が開放される。
【0091】
また、ディスクDが挿入される前は、検知部材251と検知部材252がばねの力で互いに最も接近した初期位置に設定されている。このとき、検知板253によって検知スイッチSW1がONに切換えられ、検知板254によって検知スイッチSW2がONに切換えられているが、検知スイッチSW3,SW4は共にOFFである。
【0092】
(正常なディスク搬入動作)
図7のST1において、挿入口23からディスクDが挿入されると、図6において(ii)で示すように、ディスクDのY2に向く周縁部が第1の移送ローラ112と第2の移送ローラ113に当たる前に、ディスクDによって光学検知素子F1,F2が遮られる。ST2では、光学検知素子F1と光学検知素子F2の少なくと一方の検知出力がONからOFFに切り換わったときにST3に移行し、ディスクDの搬入動作を開始する。
【0093】
ST3のディスク搬入動作では、まず、モータドライバ406が制御され、第3のモータM3が始動して、ローラ軸111がディスク搬入方向へ回転させられる。ディスクDが図6において(ii)で示す位置からさらにY2方向へ押し込まれると、ディスクDが、第1の移送ローラ112および第2の移送ローラ113と図4に示す挟持部106との間に挟まれ、移送ローラ112,113の回転力によってディスクDがY2方向へ搬入される。
【0094】
搬入されているのが、直径が8cm以上のディスクDであれば、ST4において、ディスクDの外周縁によって、検知部材251がX2方向へ押され、検知部材252がX1方向へ押されるため、検知スイッチSW1とSW2が共にONからOFFに切り換わる。制御部401は、検知スイッチSW1とSW2が共にOFFになったことを確認できたら、第3のモータM3の駆動を継続する。ディスクDが筐体2内に向けて搬入され続けると、ディスクDの外周縁で検知部材251がさらにX2方向へ押され、ST5において、検知スイッチSW3がOFFからONに切り換えられ、さらに、ST6において、外周検知部材である検知スイッチSW4がOFFからONに切り換えられる。
【0095】
光学検知素子F1とF2でディスクDの挿入が検知されてから所定時間が経過する前に、検知スイッチSW4がOFFからONに切り換わると、制御部401は、搬入されているのが直径12cmの正規のディスクDである確率が高いと判断し、ST7に移行する。なお、光学検知素子F1とF2でディスクDの挿入が検知されてから所定時間が経過する前に、ST4で検知スイッチSW1とSW2が共にOFFに切り換わらないときは第3のモータM3を逆転させて、ディスクDを挿入口23に向けて搬出する。また、所定時間以内にST6において検知スイッチSW4がONにならないときも、第3のモータM3を逆転させ、ディスクDを搬出する。
【0096】
ST7では、制御部401からモータドライバ405に指令が与えられて、第2の動力伝達部16の第2のモータM2が始動する。第2のモータM2によって図2に示す切換え部材91が(e)方向へ移動させられ、切換え部材91の切換えカム穴124の駆動部124bによって回動レバー122が反時計方向へ回動させられる。よって、それまで待機位置にあった移送ユニット17が図3に示す移送動作位置へ向けて回動させられる。なお、ディスクDの搬入に伴って、検知部材251は、ばねの力によってディスクDの外周縁を摺動してX1方向へ復帰するため、ST6においてONに切り換わった検知スイッチSW4は直ちにOFFに切り換わる。
【0097】
その後、制御部401は、ST8において、外周検知部材である検知スイッチSW4が再度OFFからONに切り換わるか否かを監視する。検知スイッチSW4が二度目のONにならないときは、ST9に移行して通常の搬入動作を続行する。
【0098】
ST9では、光学検知素子F1,F2がディスクDの挿入を検知してから所定時間以内に、検知スイッチT3がONからOFFに切換えられたか否かを確認する。ディスクDの搬入動作が継続し、第2のモータM2の動力によって第2の動力伝達部16の切換え部材91が(e)方向へ移動すると、図3に示すように、移送ユニット17が移送動作位置に正常に移行し、このときに、検知カム302がアクチュエータT31から離れ、検知スイッチSW3がONからOFFに切り換わる。制御部401は、検知スイッチSW3がONからOFFに切り換わった時点で、ST10に移行し、第2のモータM2を停止する。
【0099】
移送ユニット17が反時計方向へ回動している間は、第3のモータM3によってローラ軸111がディスク搬入方向へ回転させられている。そのため、ディスクDは移送ユニット17の回動力と、移送ローラ112,113の回転力の双方の力で筐体2内に送り込まれ、移送ユニット17が図3に示す移送動作位置に至った時点で、ディスクDは、選択位置にある支持体21の下面に供給されて装填完了位置となる。
【0100】
正常なディスクDが選択位置の支持体21の下面に移動して装填完了位置に移行すると、ディスクDが、支持体21の下面と図6に示す3個の保持爪155,156,157との間に保持されるとともに、図5に示す保持爪156がディスクDの外周縁によって反時計方向へ押され、遮光部203が検知素子Feから抜け出て、検知素子Feの受光素子が受光状態(ON)に切り換わる。制御部401は、ST11で検知素子Feの出力がONに切り換わったときに、ディスクDが装填完了位置に移動したと判断し、ST12に移行して第3のモータM3を停止し、ディスクDの搬入動作を完了する。
【0101】
その後、ユニット支持ベース13が持ち上げられ、駆動ユニット14が上昇して、回転駆動部82の回転テーブル86の中心凸部86bが選択位置の支持体21に保持されたディスクDの中心穴Daに嵌合し、中心穴Daが回転テーブル86にクランプされる。そして、第2のモータM2が逆転し、図3に示す切換え部材91が(d)方向へ移動させられ、同時に第3のモータM3が始動してローラ軸111がディスク搬入方向へ回転させられる。よって、移送ローラ112,113がディスクDの表面を転動しながら、移送ユニット17が時計方向へ回動して図2に示す待機位置に戻る。この時点で、切換え部材91によってシャッタが動作させられて、挿入口23が閉鎖される。
【0102】
そして、保持解除機構によって、図6に示す保持爪155,156,157が回動させられ、支持体21の下面でのディスクDの保持が解除される。さらに、ユニット支持ベース13が下降し、駆動ユニット14が底面6に向けて下降させられ、回転テーブル86に保持されたディスクDが選択位置の支持体21の下面から離される。そして、回転テーブル86と共にディスクDが回転駆動され、光ヘッド83によりディスクDに記録された情報が再生され、あるいはディスクDに情報が記録される。
【0103】
(ディスク搬入中の二重挿入)
図7のST8において、検知スイッチSW4が、再度、OFFからONに切り換わった場合にはST13に移行する。
【0104】
ディスクの搬入動作中に、検知スイッチSW4が、OFF−ONとなるのが2回発生する原因として、ディスクの二重挿入がある。移送ユニット17が移送動作位置に向けて回動してディスクDが支持体21に向けて搬入されている途中で、図9に示すように、別のディスクD1が、挿入口23から筐体2の内部に向けて挿入されると、移送ローラ112,113によって先行するディスクDと共に別のディスクD1が筐体2の内部に搬入され、ディスクD1の外周縁によって、検知部材251が再度X2方向へ移動させられ、検知板253によって、検知スイッチSW4が、再度、OFFからONに切り換えられる。
【0105】
このとき、制御部401は、搬送異常が発生していると判断し、ST13に移行してディスク搬出動作に移行する。ST13では、第3のモータM3を逆回転して移送ローラ112,113をディスク搬出方向に回転させ、同時に、第2のモータM2を逆転し、切換え部材91を(d)方向へ移動させて、移送ユニット17を待機位置に向けて時計方向へ回動させる。
【0106】
ST14で、検知スイッチT2がOFFからONに切り換えられると、制御部401は、図2に示すように、移送ユニット17が待機位置に移動したと判断され、ST15において、第2のモータM2を停止し、移送ユニット17の時計方向への回動を停止する。
【0107】
その後、ST16において、検知スイッチSW3がONからOFFに切り換わるかを監視する。ディスクの搬出動作で、少なくとも1枚のディスクが挿入口23に向けて搬出され、その中心が検知部材251と検知部材252を結ぶ線よりもY1側へ移動すると、その後は、ディスクの外周縁を摺動する検知部材251がばねの力でX1方向へ復帰し、検知板253が検知スイッチSW3から外れて、検知スイッチSW3がONからOFFになる。このとき、ST17に移行して、第3のモータM3を停止し、ローラ軸111の回転を停止させる。これにより、少なくとも1枚のディスクは、その一部が挿入口23から外部に突出した位置で停止する。
【0108】
なお、ST13において、搬出動作を開始した後の所定時間以内にST14において検知スイッチT2がONに切り換わらないとき、あるいはST13において、搬出動作を開始した後の所定時間以内にST16において検知スイッチSW3がOFFに切り換わらないときは、搬出動作異常と判断し、搬出動作を停止させるか、または再度ディスクを筐体内に送り込んでから排出動作に移行するリトライ処理が行われる。
【0109】
制御部401は、ST17において第3のモータM3を停止させ、搬出動作を終了した後に、ST18において光学検知素子F1,F2の検知出力を監視する。ST17においてローラ軸111の回転を停止させた時点では、少なくとも1枚のディスクがその一部を挿入口23から突出させた状態で停止しているため、光学検知素子F1,F2はディスクを検知している。このディスクが挿入口23から筐体2の外へ引き抜かれると、光学検知素子F1,F2がディスクを検知しない状態となる。
【0110】
制御部401はST18において光学検知素子F1,F2がディスクを検知しない状態となったら、少なくとも1枚のディスクが筐体2の外に取り出されたと判断する。
【0111】
ただし、図9に示すように、2枚のディスクが、移送ローラ112,113と挟持部106とで挟持されているときに、移送ローラ112,113をディスク搬出方向へ回転させると、移送ローラ112,113に接している下側のディスクに搬出力が作用するが、挟持部106に接している上側ディスクには搬出力が直接に作用しない。そのため、ST17の時点で、下側のディスクのみ搬出完了位置に移行し、上側のディスクが筐体2の内部に取り残されている可能性がある。
【0112】
そこで、制御部401は、ST8を経過してST18に移行したときには、他の検知スイッチや光学検知素子の検知状態を確認して、筐体2の内部にまだディスクが残っているか否かを検査する動作を行う。
【0113】
この検査動作は、まず、図5に示す検知素子Feの検知状態を確認する。検知素子Feの受光素子が光を検知していれば、選択位置の支持体21に1枚のディスクが残っており、このディスクDによって保持爪156が反時計方向へ回動させられていると判断できる。また、ST8においてディスクが取り出されたにもかかわらず、図5に示す検知部材251,252が初期位置へ復帰できずに検知スイッチSW1,SW2が共にONに切り換わらないときも、筐体2の内部にディスクが残っていると判断する。ディスクが残っていると判断したら、図8に示すST26に移行して、再度ディスクの搬出動作を行う。
【0114】
ST18においてディスクが取り出された後に、他の検知スイッチや検知素子の検知状態に異常がないとき、すなわち、筐体2の内部にディスクが残っていると明確に判断できないときは、ST19に移行して光学検知素子F1,F2を使用した検査動作を行う。
【0115】
ST19では、再度第2のモータM2を始動して図2に示す切換え部材91を(e)方向へ移動させて、移送ユニット17を反時計方向へ回動させるとともに、第3のモータM3を始動してローラ軸111をディスク搬出方向へ回動させる。もし、筐体2の内部にディスクが残っていたら、移送ユニット17の反時計方向への回動に伴って、移送ローラ112,113がディスクの表面を転動して、ディスクが移送ローラ112,113と挟持部106とで挟持される。ST20において、図3に示すように、検知スイッチSW3がONからOFFに切り換わったら、ST21で第2のモータM2を停止させる。このとき、移送ユニット17は、図3に示すように再び移送動作位置に移動して停止する。
【0116】
そして、ST22において、光学検知素子F1,F2の検知出力がONからOFFに切り換わったか否か、すなわち光学検知素子F1,F2がディスクを検知したか否か判断する。
【0117】
ST22において、光学検知素子F1,F2の検知出力がONのままであり、ディスクを検知しないときは、制御部401において筐体2の内部にディスクが残っていないと判断し、ST23において、第2のモータM2を始動し、移送ユニット17を時計方向へ回動させる。移送ユニット17が図2に示す待機位置へ復帰し、ST24において検知スイッチT2がONに切り換わったら、ST25において第2のモータM2を停止させ、次のディスクの搬入動作を待つ。
【0118】
ST22において、光学検知素子F1,F2がディスクDを検知したら、制御部401は筐体2の内部にディスクが残っていると判断し、ST26に移行する。
【0119】
ST26からST30までの搬出動作は、ST13からST18までの動作と同じである。ST26で移送ユニット17を時計方向へ回動させ、且つ移送ローラ112,113を搬出方向へ移動させ、ST27で検知スイッチT2がONになったら、移送ユニット17が待機位置に復帰したと判断して第2のモータM2を停止する。さらに、ST29において検知スイッチSW3がONからOFFに切り換わったら、第3のモータM3を停止し、ローラ軸111の回転を停止させる。
【0120】
なお、図7に示すフローチャートでは、ST7において移動ユニット17を反時計方向へ回動させている途中で、且つST9で移送ユニット17が移送動作位置に至る前の時点で、ST8で検知スイッチSW4が二度目のONになるかを監視しているが、ディスクの搬入動作中は、ST11において検知素子FeがONに切り換わるまでの間、検知スイッチSW4が二度ONになるかを監視し続けて、二度ONになったら、ST13に移行する制御を行うことが好ましい。
【0121】
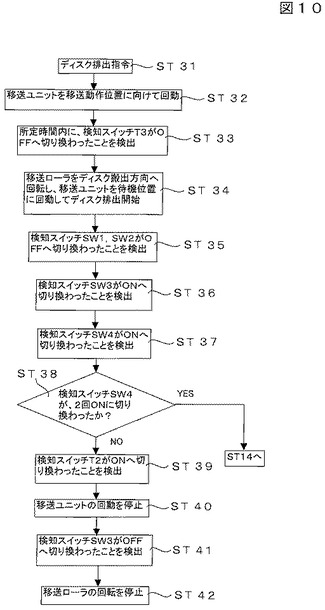
(ディスク排出動作)
駆動ユニット14で駆動が完了したディスクDを、挿入口23から排出するときは次の排出動作を行う。
【0122】
図10に示すST31においてディスク排出指令31が制御部401に与えられると、駆動ユニット14の回転テーブル86の回転が停止させられる。そして、ユニット支持ベース13が持ち上げられて、回転テーブル86にクランプされているディスクDが、選択位置にある支持体21の下面に押し付けられる。その直後に、保持爪155,156,157が回動させられて、ディスクDが、支持体21の下面と保持爪155,156,157との間で保持される。
【0123】
ST32で、第2のモータM2が駆動され、切換え部材91が(e)方向へ移動させられて、移送ユニット17が待機位置から反時計方向へ回動させられ、第3のモータM3によってローラ軸111がディスク搬出方向へ回転させられる。よって、移送ローラ112,113がディスクDの面を転動しながら、移送ユニット17が図3に示す移送動作位置に向けて回動する。
【0124】
ディスクを駆動しているときは、挿入口23がシャッタで閉じられているが、移送ユニット17が待機位置から反時計方向へ回動し始めたときに、切換え部材91の(e)方向への移動に伴って、シャッタが移動させられ、挿入口23が開放される。
【0125】
移送ユニット17が図2に示す移動動作位置へ移動すると、ST33で、検知スイッチT3がONからOFFに切り換わり、第2のモータM2が停止する。このとき、回転テーブル86と支持体21の下面との間で挟まれているディスクDのY1側の端部が、移送ローラ112,113と挟持部106との間で挟持される。そして、回転テーブル86におけるディスクDのクランプが解除され、ユニット支持ベース13と駆動ユニット14が底面6に向けて下降させられて、回転テーブル86の中心凸部86bが、ディスクDの中心穴DaからZ1方向へ抜き出される。
【0126】
その後、ST34に移行して、第3のモータM3を逆回転して移送ローラ112,113をディスク搬出方向に回転させ、同時に、第2のモータM2を逆転して、切換え部材91を(d)方向へ移動させて、移送ユニット17を時計方向へ回動させる。移送ローラ112,113のディスク搬出方向への回転と、移送ユニット17の待機位置方向への回動とによって、ディスクDが挿入口23に向けて搬出される。
【0127】
ディスクDが排出される前は、検知部材251と検知部材252が、ばねによって最も接近した位置に戻っている。ディスクDが、挿入口23に向けて搬出されると、ST35において、ディスクDの外周縁によって、検知部材251がX2方向へ押され、検知部材252がX1方向へ押されて、検知スイッチSW1とSW2がONからOFFに切り換わる。ディスクDがさらにY1方向に搬出されると、ST36において、検知スイッチSW3がOFFからONに切り換わり、ST37において、検知スイッチSW4がOFFからONに切り換わる。ST37では、ディスクDの中心D0が検知部材251と検知部材252とを結ぶ線をY1方向へ通過するときに、検知スイッチSW4が短時間だけONになり、その直後にOFFになる。
【0128】
ST38では、搬出動作において検知スイッチSW4が2回ONになったか否か監視する。まず、ディスクDが搬出され、ST37において検知スイッチSW4がONになったら、これがST31以降の1回目のONなのか、2回目のONなのかを確認する。ST38において、検知スイッチSW4のONが2回目のときは、ST31で搬出動作が開始されてST37に至る前に、図9に示すように別のディスクD1が挿入口23から挿入され、そのディスクD1によって検知スイッチSW4がONに切り換えられた可能性がある。このときには、図7に示すST14に移行し、ディスクが少なくとも1枚取り出された後に、他のディスクが筐体2の内部に残っているか否かの検査が行われる。
【0129】
この検査は、ST18において、少なくとも1枚のディスクが取り出された後に、検知素子Feおよび検知スイッチSW1,SW2の出力などを確認することで行われる。あるいはST19以下の動作に移行し、移送ユニット17を反時計方向へ回動させて、光学検知素子F1,F2でディスクが残っているか否かの検査を行う。
【0130】
ST37において検知スイッチSW4のONへの切り換わりが、搬出動作を開始してから1回目である場合には、ST39以降の搬出動作を継続する。ただし、その後も、搬出動作中に、ST38において、検知スイッチSW4が2回目のONになるか否か監視する。
【0131】
SW4が2回目のONにならないときは、1枚のディスクDが正常に搬出されていると判断し、ST39において検知スイッチT2がONになったら、移送ユニット17が図2に示す待機位置に復帰したと判断し、ST40で第2のモータM2を停止する。また、ST41において、検知スイッチSW3がOFFとなったら、ディスクが搬出完了位置に至ったと判断し、ST42で第3のモータM3を停止する。
【0132】
なお、図10では、ST39において検知スイッチT2がONになるまでの間、ST38において検知スイッチSW4が2回ONになるかを監視するように図示されているが、ST38の監視は、ST41において検知スイッチSW3がOFFになるまで継続し、検知スイッチSW4が2回ONになったら、何時でもST14へ移行することが好ましい。
【0133】
なお、ディスク収納領域20内に移動している支持体21に保持されたディスクを排出するときの動作は、駆動ユニット14を図6において破線で示す退避位置へ移動させ、支持体選択手段22を動作させていずれかの支持体21を選択位置へ移動させる。そしてST31以下の動作を行う。
【0134】
なお、上記実施の形態は、筐体2の内部に複数の支持体21が収納されたディスク収納型ディスク装置について説明したが、本発明はこれには限定されず、筐体の内部に1枚のディスクのみが挿入されるディスク装置においても適用可能である。
【0135】
また、図の実施の形態では、機械式の検知スイッチSW4が外周検知部材であるが、光学式の検知素子でディスクの外周部分を検知して、この光学式の検知素子を外周検知部材として使用してもよい。
【図面の簡単な説明】
【0136】
【図1】本発明のディスク装置の全体構造を示す分解斜視図、
【図2】移送ユニットが待機位置にあるときの第2の動力伝達部を示す平面図、
【図3】移送ユニットが移送動作位置にあるときの第2の動力伝達部を示す平面図、
【図4】移送ユニットおよび第3の動力伝達部を示す部分斜視図、
【図5】ディスク装置に搭載されている検知機構を示す平面図、
【図6】ディスクの搬入動作を示す平面図、
【図7】ディスク搬入時の動作フローを示すフローチャート、
【図8】ディスク搬入時の動作フローを示すフローチャート、
【図9】ディスクの二重挿入状態を示す平面図、
【図10】ディスク排出時の動作フローを示すフローチャート
【図11】ディスク装置の回路ブロック図、
【符号の説明】
【0137】
1 ディスク装置
2 筐体
12 第1の動力伝達部
14 駆動ユニット
16 第2の動力伝達部
17 移送ユニット
19 第3の動力伝達部
21 支持体
22 支持体選択手段
23 挿入口
82 回転駆動部
106 挟持部
112,113 移送ローラ
251,252 検知部材
F1,F2 光学検知素子(挿入口側検知部材)
Fe 検知素子(装填完了検知部材)
SW4 検知スイッチ(外周検知部材)
【特許請求の範囲】
【請求項1】
筐体に開口する挿入口と、前記挿入口から挿入されたディスクを前記筐体内の装填完了位置へ向けて搬送する搬送機構とを有するディスク装置において、
前記挿入口から挿入されたディスクが前記装填完了位置に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬入動作を開始した後に、前記外周検知部材が2回検知状態となったときに、前記搬送機構を逆転させてディスクの排出動作に移行することを特徴とするディスク装置。
【請求項2】
ディスクの搬出動作が完了した後に、他のディスクが前記筐体内に残っているか否かの確認動作を行う請求項1記載のディスク装置。
【請求項3】
筐体に開口する挿入口と、前記筐体内の装填完了位置に有るディスクを前記挿入口へ向けて搬送する搬送機構とを有するディスク装置において、
ディスクが前記装填完了位置から前記挿入口に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬出動作を開始した後に、前記外周検知部材が2回検知状態となったときに、ディスクの搬出動作を完了させるとともに、その完了後に、他のディスクが前記筐体内に残っているか否かの確認動作を行うことを特徴とするディスク装置。
【請求項4】
前記確認動作により、前記筐体内に他のディスクが残っていることが検知されたときに、再度搬出動作が行われる請求項2または3記載のディスク装置。
【請求項5】
前記確認動作は、前記外周検知部材以外の他の検知部材を用いて行われる請求項2ないし4のいずれかに記載のディスク装置。
【請求項6】
前記挿入口の内側に、ディスクが前記筐体の外へ取り出されたことを検知する挿入口側検知部材が設けられており、
前記挿入口側検知部材が前記他の検知部材として使用され、この挿入口側検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われる請求項5記載のディスク装置。
【請求項7】
前記挿入口側検知部材は、移動するユニットに搭載されており、前記確認動作では、前記ユニットと共に前記挿入口側検知部材が、前記挿入口側から前記装填完了位置に向けて移動する請求項6記載のディスク装置。
【請求項8】
前記装填完了位置に、ディスクを検知する装填完了検知部材が設けられており、
前記装填完了検知部材が前記他の検知部材として使用され、この装填完了検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われる請求項5記載のディスク装置。
【請求項1】
筐体に開口する挿入口と、前記挿入口から挿入されたディスクを前記筐体内の装填完了位置へ向けて搬送する搬送機構とを有するディスク装置において、
前記挿入口から挿入されたディスクが前記装填完了位置に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬入動作を開始した後に、前記外周検知部材が2回検知状態となったときに、前記搬送機構を逆転させてディスクの排出動作に移行することを特徴とするディスク装置。
【請求項2】
ディスクの搬出動作が完了した後に、他のディスクが前記筐体内に残っているか否かの確認動作を行う請求項1記載のディスク装置。
【請求項3】
筐体に開口する挿入口と、前記筐体内の装填完了位置に有るディスクを前記挿入口へ向けて搬送する搬送機構とを有するディスク装置において、
ディスクが前記装填完了位置から前記挿入口に至る経路の途中で且つディスクの中心が通過する通過線から離れた位置に配置された外周検知部材と、前記外周検知部材が検知状態となるか否かを監視する制御部とが設けられており、
前記制御部は、ディスクの搬出動作を開始した後に、前記外周検知部材が2回検知状態となったときに、ディスクの搬出動作を完了させるとともに、その完了後に、他のディスクが前記筐体内に残っているか否かの確認動作を行うことを特徴とするディスク装置。
【請求項4】
前記確認動作により、前記筐体内に他のディスクが残っていることが検知されたときに、再度搬出動作が行われる請求項2または3記載のディスク装置。
【請求項5】
前記確認動作は、前記外周検知部材以外の他の検知部材を用いて行われる請求項2ないし4のいずれかに記載のディスク装置。
【請求項6】
前記挿入口の内側に、ディスクが前記筐体の外へ取り出されたことを検知する挿入口側検知部材が設けられており、
前記挿入口側検知部材が前記他の検知部材として使用され、この挿入口側検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われる請求項5記載のディスク装置。
【請求項7】
前記挿入口側検知部材は、移動するユニットに搭載されており、前記確認動作では、前記ユニットと共に前記挿入口側検知部材が、前記挿入口側から前記装填完了位置に向けて移動する請求項6記載のディスク装置。
【請求項8】
前記装填完了位置に、ディスクを検知する装填完了検知部材が設けられており、
前記装填完了検知部材が前記他の検知部材として使用され、この装填完了検知部材によって、前記筐体内に他のディスクが残っているか否かの検知動作が行われる請求項5記載のディスク装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−102770(P2010−102770A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−272864(P2008−272864)
【出願日】平成20年10月23日(2008.10.23)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月23日(2008.10.23)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]