
ディスク駆動装置、ディスク駆動方法、及びプログラム
【課題】 ディスクスリップの発生をより効果的に防止すること。
【解決手段】 光ディスク駆動装置(ディスク駆動装置)内の湿度を検出する湿度検出センサ19(湿度検出部)と、この湿度検出センサ19により検出された湿度に応じて、ターンテーブルで回転させる光ディスクの回転数を変化させる制御回路21(ディスク回転速度制御部)とを備えるようにする。
【解決手段】 光ディスク駆動装置(ディスク駆動装置)内の湿度を検出する湿度検出センサ19(湿度検出部)と、この湿度検出センサ19により検出された湿度に応じて、ターンテーブルで回転させる光ディスクの回転数を変化させる制御回路21(ディスク回転速度制御部)とを備えるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ディスク駆動装置、ディスク駆動方法、及びプログラムに関する。
【背景技術】
【0002】
光ディスク装置は、映像信号および音響信号の記録、再生に広く利用されている。近年、光ディスク装置は、より多くのデータを記録させるために高密度化された光ディスクからデータを速く読み取るための高速化がなされている。そのため、光ディスク装置における読み取りの高速化を実現するにあたって、光ディスクを回転させるときの加速度、および減速時の加速度も次第に大きくなっている。光ディスクを回転させるための加速度が次第に大きくなる状況下では、光ディスクを載置するターンテーブルと光ディスクの間に、これらの摩擦による削れカス(たとえば、ポリカーボネート粉など)、または外部から混入した塵などの異物等が存在すると、ディスクスリップが発生することがある。
【0003】
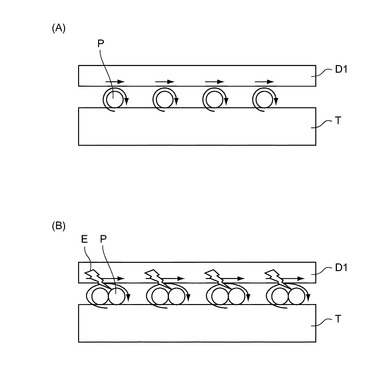
図7は、ディスクスリップが発生する状況を説明するための図である。図7の(A)に示すように、光ディスクD1とターンテーブルTの間に異物Pが存在すると、光ディスクD1とターンテーブルTの間の摩擦力が弱まることでディスクスリップが発生する。また、図7の(B)に示すように、光ディスク装置内が低湿度環境下の場合には、静電気Eの影響により図7の(A)に比べて多量の異物Pが吸い集められ、ディスクスリップがより発生しやすい状況となる。
【0004】
上述したディスクスリップが発生することに起因した問題としては次のようなものがある。たとえば、光ディスクD1のディスク起動時にディスクスリップが発生した場合には、所定時間内に光ディスクD1が所定回転数に達しないこととなり、再生動作に移行できない、すなわち光ディスクD1が再生できるまでに時間がかかるという問題が生じる。また、光ディスクD1の再生中にディスクスリップが発生した場合には、光ディスクD1の内周、外周間でサーチする動作が困難となる。また、光ディスクD1の再生動作から停止動作に移行する際にディスクスリップが発生した場合には、光ディスクD1が停止するまでの時間は、ディスクスリップが発生していない状態時と比較して停止するまでの時間が余計にかかるという問題が生じる。また、ディスクスリップが発生しやすい状況下では、ターンテーブルTと光ディスクD1の間にこれらの摩擦による削れカスが発生しやすくなり、この削れカスによってディスクスリップが更に発生しやすい状況を生み出すという悪循環に陥ってしまうという問題が生じる。
【0005】
ディスクスリップに起因する問題に対応するものとして、光ピックアップの移動に伴うスピンドルモータの加減速発生時に、光ピックアップを移動させる距離が所定の値より大きい場合に、移動させる距離を所定の値以下に設定するように制御するものが知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−149653号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に開示される制御方法では、光ピックアップの移動距離を制限することでスピンドルモータを加減速する際に発生するトルクを小さくすることで、ディスクスリップの発生を防止するようにしている。しかしながら、特許文献1に開示される制御方法は、光ディスク装置が使用される環境(たとえば湿度環境など)によっては、ディスクスリップを防止できない場合がある。
【0008】
本発明は、ディスクスリップの発生をより効果的に防止することができるディスク駆動装置、ディスク駆動方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一側面は、ディスクが載ったターンテーブルを回転させるディスク駆動装置であって、自装置内の湿度を検出する湿度検出部と、湿度検出部により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるディスク回転速度制御部と、を備えるものである。
【0010】
また、上述の構成に加えて、ディスク回転速度制御部は、湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、通常の再生動作として設定されたディスクの回転速度よりも遅い回転速度に変更することが好ましい。
【0011】
また、上述の構成のいずれかに加えて、ディスク回転速度制御部は、湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、通常の再生動作として設定されたディスクの上限回転速度よりも遅い上限回転速度に変更することが好ましい。
【0012】
また、上述の構成のいずれかに加えて、前記ディスク回転速度制御部は、ディスクの読み取り方式としてCLV(Constant Liner Velocity)方式を採用しており、湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、CAV(Constant Angular Velocity)方式に変更することが好ましい。
【0013】
また、上述の構成のいずれかに加えて、ディスク回転速度制御部は、湿度検出部により検出された湿度に応じて、ディスクの起動時の目標回転数を変化させることが好ましい。
【0014】
また、上述の構成のいずれかに加えて、ディスク回転速度制御部は、湿度検出部により検出された湿度に応じて、ディスクの停止時の目標回転数を段階的に下げながら停止制御を行うようにすることが好ましい。
【0015】
また、本発明の一側面は、上述したディスク駆動装置が実行するディスク駆動方法であって、湿度検出部により、自装置内の湿度を検出するステップと、ディスク回転速度制御部により、湿度検出部により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるステップと、を有するものである。
【0016】
また、本発明の一側面は、コンピュータを、上述したディスク駆動装置として機能させるためのプログラムであって、自装置内の湿度を検出する湿度検出手段と、湿度検出手段により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるディスク回転速度制御手段、として機能させるためのプログラムである。
【発明の効果】
【0017】
本発明によれば、ディスクスリップの発生をより効果的に防止することができるディスク駆動装置、ディスク駆動方法、及びプログラムを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施例1に係る光ディスク駆動装置の概略構成を示す図である。
【図2】図1に示す光ディスク駆動装置の制御系について示したブロック図である。
【図3】図1に示す光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図4】本発明の実施例2に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図5】本発明の実施例3に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図6】本発明の実施例4に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図7】ディスクスリップが発生する状況を説明するための図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施するための形態(実施例)を図面に基づいて説明する。
【実施例1】
【0020】
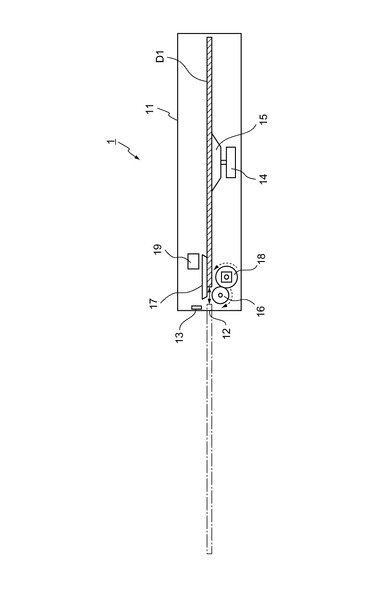
図1は、本発明の実施例1に係る光ディスク駆動装置1の概略構成を示す図である。光ディスク駆動装置1は、ケース11と、挿入口12と、センサ13と、スピンドルモータ14と、ターンテーブル15と、搬送ローラ16と、ディスクガイド17と、ローディングモータ18と、湿度検出センサ19(湿度検出部の一例)とを構成要素としており、光ディスクD1の再生動作、停止動作等を実行する。この光ディスク駆動装置1は、請求項のディスク駆動装置の一例であり、光ディスクD1の再生、停止機能を備えるが、他の機能(たとえば、光ディスクD1へのデータの書込み機能など)を備える、または他の装置の一部として構成されてもよい。
【0021】
ここで、光ディスクD1は、請求項のディスクの一例であるが、たとえば、プレス盤CD、プレス盤DVD、CD−R(Compact Disc Recordable)、CD−RW(Rewritable)、DVD−R(Digital Versatile Disc Recordable)、DVD+R、DVD−RW、DVD+RW、または、これらの2層式または両面式のディスク型記録媒体である。これらの光ディスクD1は、たとえば、プレスによりピットを形成して情報が記録されている、有機色素にレーザ光を照射して昇華させることによりピットを形成して情報が記録されている、または相変化材料にレーザ光を照射して結晶または非結晶の相を変化させることによりピットを形成して情報が記録されているものである。
【0022】
図1に示すように、光ディスク駆動装置1には光ディスクD1を挿入するために、筐体をなすケース11の正面パネルに挿入口12が設けられている。ケース11の内部には挿入口12から連続した搬送路が形成されている。また、ケース11の内部には、光ディスクD1の挿抜を検出するセンサ13と、光ディスクD1を上面と下面から挟み込むように、搬送ローラ16およびディスクガイド17とが設けられている。搬送ローラ16は、ローディングモータ18の駆動に応じて回転するように構成されている。
【0023】
スピンドルモータ14は、後述する制御回路21(図2)の制御に応じて、CLV(Constant Linear Velocity)方式、またはCAV(Constant Angular
Velocity)方式に基づいて、ターンテーブル15を回転駆動する。ここで、CLV方式とは、単位時間あたりに不図示の光ピックアップが読み取る光ディスクD1のトラック長を一定にするために、光ピックアップの位置に応じてスピンドルモータ14を制御してターンテーブル15の回転数(つまり光ディスクD1の回転数)を変化させて読み取る制御方式をいう。また、CAV方式とは、回転数を一定にして読み取る制御方式をいう。なお、スピンドルモータ14は、上述したCLV方式、CAV方式以外でも、たとえばZCLV(Zoned CLV)方式、ZCAV(Zoned CAV)方式、PCAV(Partial CAV)、またはそれ以外の回転制御方式に基づいて光ディスクD1を回転駆動するようにしてもよい。
【0024】
湿度検出センサ19は、ケース11内の湿度を検出する。なお、湿度検出センサ19で検出される湿度は、相対湿度、絶対湿度のいずれでもよい。湿度検出センサ19により検出された湿度情報は、後述する制御回路21へ出力される。なお、以下に示す実施例は相対湿度を用いた例を示している。
【0025】
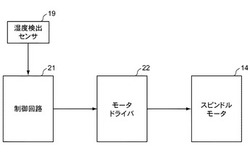
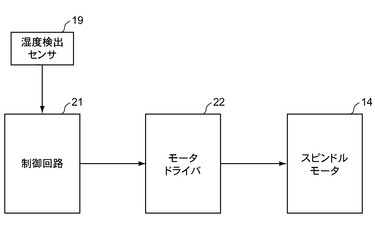
図2は、図1に示す光ディスク駆動装置1の制御系について示したブロック図である。図2に示す制御回路21は、請求項の回転速度制御部の一例であり、たとえば、不図示のCPU(Central ProcessingUnit)、RAM(Random Access
Memory)、ROM(Read Only Memory)、I/F(Interface)等を備えて構成され、光ディスク駆動装置1の各部を制御する。CPUは、ROMに格納された処理プログラム等を読み出してRAMに展開して実行することにより光ディスク駆動装置1の全体の制御を行う。RAMは、CPUにより実行された処理プログラム、処理プログラムが実行される際に生じる処理結果、および入力データ等を所定の格納領域内にそれぞれ格納する。ROMは、たとえば、半導体メモリで構成され、上述した処理プログラムやデータ等が予め記憶されている。
【0026】
モータドライバ22は、制御回路21の制御によりスピンドルモータ14の加減速を行う。モータドライバ22は、制御回路21から供給される回転指令信号の電圧値(ここでは3.3Vとする)の中間電圧を基準電圧(ここでは1.65Vとする)とし、制御回路21から供給される回転指令信号の電圧値が高い場合には加速動作を、低い場合には減速動作を行う。これにより、制御回路21から供給される回転指令信号の電圧値と基準電圧値との差分の絶対値が大きければ大きいほど、スピンドルモータ14に流れる電流値が大きくなり、スピンドルモータ14に大きなトルクを発生させることができる。
【0027】
(光ディスク駆動装置1の動作)
図1で示した挿入口12に光ディスクD1が挿入されると、センサ13により光ディスクD1の挿入を検知した検出信号が制御回路21に出力される。制御回路21は、センサ13からの検出信号に応じてローディングモータ18を正転駆動させる。ローディングモータ18の駆動に応じて搬送ローラ16が回転し、光ディスクD1はケース1内部の搬送路に沿ってケース11の奥へ搬送される。そして、図示しないセンサにより光ディスクD1の奥端部が検出されると、その検出信号が制御回路21に出力され、この出力を受けて制御回路21によりローディングモータ18の正転駆動が停止される。これにより、光ディスクD1は、挿入口2から所定の収容位置にまで搬送され、保持される。
【0028】
制御回路21は、不図示の操作部から光ディスクD1の再生を指示する信号が出力されると、スピンドルモータ14を駆動させる。スピンドルモータ14が駆動することでターンテーブル15が回転し、ターンテーブル15上に載置された光ディスクD1も回転する。また、制御回路21は、不図示の操作部から光ディスクD1を排出する信号が出力されると、ローディングモータ18を反転駆動させて、光ディスクD1をケース11の挿入口2へと搬送する。そして、制御回路21は、センサ13により光ディスクD1の手前側の端部が排出位置に達したことを検出した時点でローディングモータ18を停止させる。
【0029】
制御回路21は、光ディスクD1を停止状態から再生状態にする場合、及び再生状態から停止状態にする場合に、最大の回転指令信号をモータドライバ22へ出力して制御を行う。また、制御回路21は、光ディスクD1を再生する際には、加速電圧でモータドライバ22を加速させ、スピンドルモータ4の回転数が所定の値(たとえば、2500rpm)に達した場合には、回転指令信号の電圧値を基準電圧付近に維持する。そして、制御回路21は、光ディスクD1を停止させる際には、減速電圧でモータドライバ22を減速させて、スピンドルモータ14の回転を停止させる。
【0030】
また、制御回路21は、湿度検出センサ19により検出された湿度に基づいてスピンドルモータ14の回転速度を制御する。以下、光ディスク駆動装置1における光ディスクD1再生時のスピンドルモータ4の制御動作について説明する。なお、制御回路21は、光ディスクD1からの読み取り方式としてCLV方式を採用し、1倍速(CLV1x)、4倍速(CLV4x)のそれぞれの再生速度にスピンドルモータ14を制御して設定できるものとする。
【0031】
図3は、図1に示す光ディスク駆動装置1の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。図3に示すように、光ディスク駆動装置1で不図示の操作部から光ディスクD1の再生を開始する信号が出力されると、光ディスク回転速度制御処理が開始される(再生開始)。
【0032】
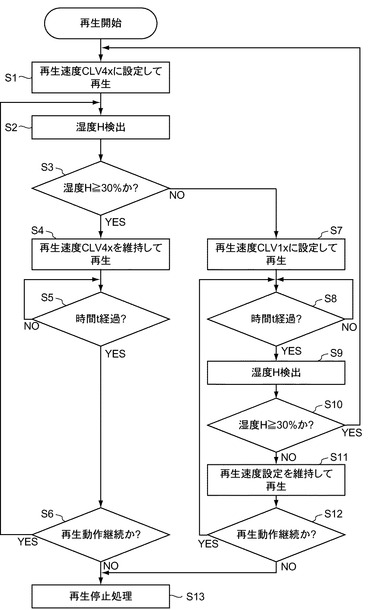
ステップS1では、制御回路21は、CLV方式であって4倍速の再生速度(CLV4x)に設定して再生を開始する。ステップS2では、制御回路21は、湿度検出センサ19により検出された光ディスク駆動装置1内の湿度Hを取得する。ステップS3では、制御回路21は、湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上である場合(YES)にはステップS4に移行し、30%以上ではない場合、つまり30%未満である場合(NO)にはステップS7に移行する。
【0033】
ステップS4では、制御回路21は、CLV方式であって4倍速の再生速度(CLV4x)を維持して再生を続行する。ステップS5では、制御回路21は、ステップS2で湿度Hを取得してから所定時間tが経過したか否かを判定し、所定時間tが経過している場合(YES)にはステップS6へ移行し、経過していない場合(NO)には、所定時間tが経過するまでこの判定を続ける。所定時間tは、たとえば10分、15分など、光ディスク駆動装置1が使用される環境等に応じて適宜設定すればよい。ステップS6では、制御回路21は、再生動作が継続しているか否かを判定し、継続している場合(YES)には、ステップS2の処理へ戻り、継続していない場合(NO)にはステップS13の処理へ移行する。
【0034】
ステップS7では、制御回路21は、CLV方式であって、1倍速の再生速度(CLV1x)に設定して再生する。ステップS8では、制御回路21は、ステップS2で湿度Hを取得してから所定時間tが経過したか否かを判定し、所定時間tが経過している場合(YES)にはステップS9へ移行し、経過していない場合(NO)には、所定時間tが経過するまでこの判定を続ける。
【0035】
ステップS9では、制御回路21は、湿度検出センサ19により検出された光ディスク駆動装置1内の湿度Hを取得する。ステップS10では、制御回路21は、湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上である場合(YES)にはステップS1に戻り、30%以上ではない場合、つまり30%未満である場合(NO)にはステップS11に移行する。ステップS11では、制御回路21は、再生速度を維持して(つまり、CLV1xの設定を維持)再生を続行する。ステップS12では、制御回路21は、再生動作が継続しているか否かを判定し、継続している場合(YES)には、ステップS8の処理へ戻り、継続していない場合(NO)にはステップS13の処理へ移行する。ステップS13では、制御回路21は、再生停止処理を実行する。
【0036】
上述の図3に示す制御方法では、制御回路21は、ステップS1において通常時の再生速度はCLV方式で4倍速として設定していたが、CLV方式での4倍速以外の値(たとえば、CLV方式で8倍速、2倍速、或いは1倍速など)と設定しておいてもよい。たとえば、ステップS1において通常時の再生速度として1倍速と設定しておいてもよく、この場合は、ステップS3において湿度Hの値が所定値以上である場合には、ステップS4において4倍速の回転速度に変更されるため、通常時の設定より速い回転速度に変更されることになる。また、上述の図3に示す制御方法では、ステップS3およびステップS10において湿度Hの判定基準として30%以上であるか否かにより判定しているが、30%以外の値(たとえば、20%、40%、50%など)を基準として設定してもよい。また、ステップS3およびステップS10の判定において、検出された湿度Hが30%である場合にYESの判定とならないように、30%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3およびステップS10において30%を超えるか否かにより判定した場合には、検出された湿度Hが30%の場合には30%を超えていないため、NOの判定処理になり、ステップS3ではステップS7へ処理を移行し、ステップS10ではステップS1の処理へ移行する。このように、ステップS3およびステップS10における湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。
【0037】
以上のように、この光ディスク駆動装置1では、通常時の再生速度に対して湿度Hの値が所定値(上述の例では30%)以上であるか否かによって、再生速度を所定の固定倍速(CLV1xまたはCLV4x)に変更するように制御している。
【0038】
このように再生速度を制御することで、湿度Hの値が所定値以上ではない、つまり所定値未満である場合には、通常時の再生速度である4倍速ではなく、1倍速の回転速度となり、通常時の設定より遅い回転数に変更される。このように、光ディスク駆動装置1内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、ディスク回転速度が通常より遅い設定に変更されるため、装置内の湿度環境に関わらず再生時のディスク回転速度を設定している場合と比較してディスクスリップの発生をより効果的に防止することが可能となる。
【0039】
また、ディスク起動時の目標回転数が制御回路21により予め設定されている場合に、この目標回転数に対して次のような制御をするようにしてもよい。たとえば、制御回路21により通常時の起動目標回転数が2000rpmと設定されており、湿度検出センサ19から検出された湿度Hが制御回路21により所定の値以上(たとえば湿度30%以上)であると判定された場合には、通常時の起動目標回転数と同一である2000rpmとし、所定の値未満(たとえば湿度30%未満)であると判定された場合には、起動目標回転数は1000rpmとなるように制御するようにしてもよい。このような制御方法を採用すれば、光ディスク駆動装置1内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、通常時に設定されている起動目標回転数より低い起動目標回転数に変更されるため、装置内の湿度環境に関わらずディスク起動時の目標回転数を一定としている場合と比較してディスクスリップの発生をより効果的に防止することが可能となる。
【0040】
また、ディスク停止動作時の停止目標回転数が制御回路21により予め設定されている場合には、この停止目標回転数に対して次のような制御をするようにしてもよい。たとえば、制御回路21により通常時の停止目標回転数が0rpmと設定されており、湿度検出センサ19から検出された湿度Hが制御回路21により所定の値以上(たとえば湿度30%以上)であると判定された場合には、通常時の停止目標回転数と同一である0rpmとし、所定の値未満(たとえば湿度30%未満)であると判定された場合には、停止目標回転数を段階的に設定して停止させるようにしてもよい。
【0041】
ここで、停止目標回転数を段階的に設定する方法としては、たとえば、制御回路21により再生中の回転数より所定の回転数(たとえば100rpm)下げた停止目標回転数を設定し、スピンドルモータ14がこの停止目標回転数となるたびに、上述した所定の回転数を減じた回転数を段階的に設定していき、最終的な停止目標回転数が0rpmとなるようにする。このような制御方法を採用すれば、光ディスク駆動装置1内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、回転を停止させるためのモータドライバ22での減速が段階的に行われるため、装置内の湿度環境に関わらずディスク停止時の目標回転数を一定としている場合と比較して、ディスク停止時に発生するディスクスリップの発生をより効果的に防止することが可能となる。
【実施例2】
【0042】
本発明の実施例2について説明する。実施例2では、通常時に設定されている再生速度に対して、湿度検出センサ19で検出された湿度Hの値毎に所定の係数演算式を用いて再生速度を変化させる。なお、実施例2は、再生速度の制御方法は異なるが、実施例1で説明した光ディスク駆動装置1と同様の構成であるため、これらの図示および説明は省略する。
【0043】
図4は、本発明の実施例2に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。なお、実施例1と同一の動作に関しては図3と同一のステップ番号を付し、その説明を省略、または簡略化して説明する。
【0044】
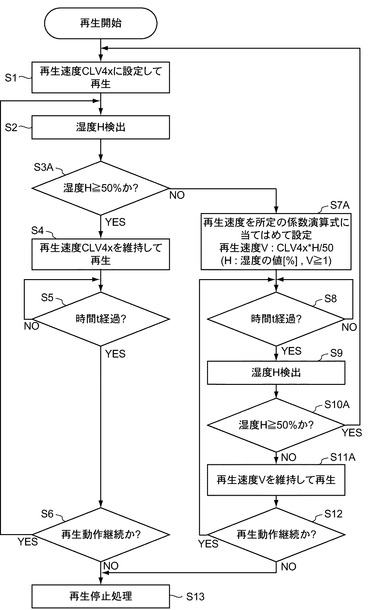
ステップS3Aでは、制御回路21は、湿度検出センサ19で検出された湿度Hが50%以上であるか否かを判定し、湿度Hが50%以上ではない(つまり、湿度Hが50%未満である)場合には、ステップS7Aに移行する。ステップS7Aでは、制御回路21は、再生速度Vを次の係数演算式(1)に当てはめて設定する。
再生速度V=4倍速×湿度H/50・・・(1)
ここで、湿度Hの単位は%であり、再生速度Vは1倍速以上の値とする。
【0045】
そして、制御回路21は、ステップS8、ステップS9では実施例1と同様の処理を実行する。ステップS10Aでは、制御回路21は、湿度検出センサ19で検出された湿度Hが50%以上であるか否かを判定し、50%以上である場合(YES)には、ステップS1の処理へ戻る(再生速度を4倍速に設定する)。一方、湿度Hが50%以上ではない(つまり、湿度Hが50%未満である)場合には、ステップS11Aに移行する。ステップS11Aでは、制御回路21は、再生速度Vを維持して再生し、ステップS12では再生動作が継続されている間(YES)はステップS8の処理へ移行し、不図示の操作部から停止信号が制御回路21に出力された場合(NO)にはステップS13の処理へ移行し、再生停止処理を実行する。
【0046】
上述の図4に示す制御方法では、ステップS3AおよびステップS10Aにおいて湿度Hの判定基準として50%以上であるか否かにより判定しているが、50%以外の値(たとえば、30%、40%など)を基準として設定してもよい。また、ステップS3AおよびステップS10Aの判定において、検出された湿度Hが50%である場合にYESの判定とならないように、50%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3AおよびステップS10Aにおいて50%を超えるか否かにより判定した場合には、検出された湿度Hが50%の場合には50%を超えていないため、NOの判定処理になり、ステップS3AではステップS7Aへ処理を移行し、ステップS10AではステップS1の処理へ移行する。このように、ステップS3AおよびステップS10Aにおける湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。
【0047】
実施例2の光ディスク駆動装置では、図4に示したように、通常時の再生速度に対して、湿度検出センサ19で検出された湿度Hの値毎に所定の係数演算式を用いて再生速度を変化させるようにしている。このように再生速度を細かく制御することで、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、ディスク回転速度が通常より遅い設定に変更されるため、装置内の環境に関わらず再生時のディスク回転速度を設定している場合と比較してディスクスリップの発生をより効果的に防止することができる。また、実施例1のように固定の倍速を設定する場合と比較して、所定の係数演算式を用いるためより細かく再生速度を変化させることが可能となる。
【0048】
また、実施例2においても実施例1と同様に、図4に示した光ディスク駆動装置1内の湿度環境に応じて再生速度を変更させる方法は、再生速度以外にも適用可能である。すなわち、ディスク起動時の目標回転数が制御回路21により予め設定されている場合にはこの目標回転数に対して、次のような制御をするようにしてもよい。たとえば、通常時の起動目標回転数が2000rpmと設定されている場合で、制御回路21により湿度Hの値毎に上述した所定の係数演算式を用いて起動目標回転数を変化させるように制御してもよい。このような制御方法を採用すれば、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、通常時に設定されている起動目標回転数より低い起動目標回転数に変更されるため、装置内の環境に関わらずディスク起動時の目標回転数を一定としている場合と比較してディスクスリップの発生をより効果的に防止することができる。また、実施例1のように固定の倍速を設定する場合と比較して、所定の係数演算式を用いるためより細かくディスク起動時の目標回転数を変化させることが可能となる。
【0049】
また、ディスク停止動作時の停止目標回転数が制御回路21により予め設定されている場合には、この停止目標回転数に対して、次のような制御をするようにしてもよい。たとえば、通常時の停止目標回転数が0rpmと設定されている場合で、湿度検出センサ19で検出された湿度Hが制御回路21により所定の値以上(たとえば湿度50%以上、50%以外の値を設定してもよい)であると判定された場合には、通常時の停止目標回転数と同一である0rpmとし、所定の値未満(たとえば湿度50%未満)であると判定された場合には、停止目標回転数を段階的に設定して停止させるようにしてもよい。
【0050】
停止目標回転数を段階的に設定する方法としては、たとえば、再生中の回転数より所定の回転数(たとえば100rpm)下げた停止目標回転数を設定し、この停止目標回転数となるたびに、上述した所定の回転数を減じた回転数を段階的に設定していき、最終的な停止目標回転数が0rpmとなるようにする。このような制御方法を採用すれば、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、回転を停止させるためのモータドライバ22での減速が段階的に行われるため、装置内の環境に関わらずディスク停止時の目標回転数を一定としている場合と比較して、ディスク停止時に発生するディスクスリップの発生をより効果的に防止することが可能となる。
【実施例3】
【0051】
本発明の実施例3について説明する。実施例3では、湿度検出センサ19で検出された湿度Hが所定の値未満になった場合には、再生速度に対して上限値を設けるものである。なお、実施例3は、再生速度の制御方法は異なるが、実施例1で説明した光ディスク駆動装置1と同様の構成であるため、これらの図示および説明は省略する。
【0052】
図5は、本発明の実施例3に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。なお、実施例1と同一の動作に関しては図3と同一のステップ番号を付し、その説明を省略、または簡略化して説明する。
【0053】
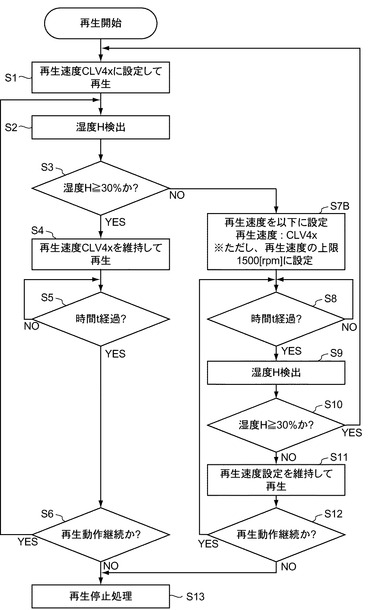
ステップS3で、制御回路21により湿度検出センサ19で検出された湿度が30%以上であるか否かを判定し、30%以上ではない、つまり30%未満である場合(NO)にはステップS7Bに移行する。ステップS7Bでは、再生速度は4倍速のままであるが、再生速度に上限値(たとえば1500rpm)を設ける。
【0054】
上述の図5に示す制御方法では、制御回路21は、ステップS1において通常時の再生速度はCLV方式で4倍速として設定していたが、CLV方式での4倍速以外の値(たとえば、CLV方式で8倍速、2倍速、或いは1倍速など)と設定しておいてもよい。また、上述の図5に示す制御方法では、ステップS3およびステップS10において湿度Hの判定基準として30%以上であるか否かにより判定しているが、30%以外の値(たとえば、20%、40%、50%など)を基準として設定してもよい。また、ステップS3およびステップS10の判定において、検出された湿度Hが30%である場合にYESの判定とならないように、30%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3およびステップS10において30%を超えるか否かにより判定した場合には、検出された湿度Hが30%の場合には30%を超えていないため、NOの判定処理になり、ステップS3ではステップS7へ処理を移行し、ステップS10ではステップS1の処理へ移行する。このように、ステップS3およびステップS10における湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。
【0055】
実施例3の光ディスク駆動装置では、図5に示したように、再生速度に対して、湿度Hの値が所定の値未満になった場合には再生速度に上限値を設定するようにしている。このような制御方法を採用すれば、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、設定されている再生速度が上限値より速くならないように制御されるため、装置内の湿度環境に関わらずディスク再生速度を一定としている場合と比較してディスクスリップの発生をより効果的に防止することが可能となる。
【実施例4】
【0056】
本発明の実施例4について説明する。実施例4では、湿度検出センサ19で検出された湿度Hの値が所定の値未満になった場合には、再生方式をCLV方式からCAV方式へ変更するものである。ここでの再生速度設定例としては、CLV方式における最小回転速度に対して、CAV方式での回転速度がこれ以下となる値に設定すればよい。たとえば、CLV方式の4倍速における最小回転速度以下とするためには、CAV方式の再生速度は4倍速以下の値とすればよい。なお、実施例4は、再生速度の制御方法は異なるが、実施例1で説明した光ディスク駆動装置1と同様の構成であるため、これらの図示および説明は省略する。
【0057】
図6は、本発明の実施例4に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。なお、実施例1と同一の動作に関しては図3と同一のステップ番号を付し、その説明を省略、または簡略化して説明する。
【0058】
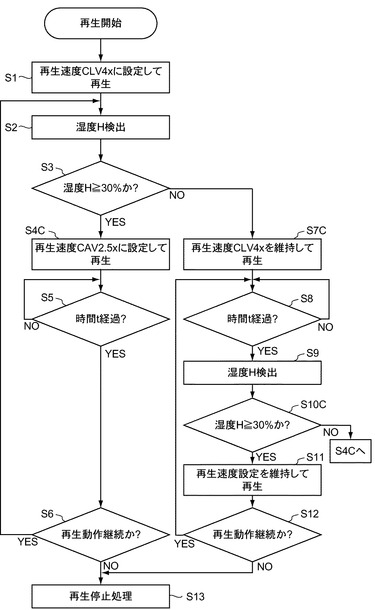
ステップS3では、制御回路21は、湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上であると判定した場合(YES)には、ステップS7Cで再生速度をCLV方式の4倍速の設定を維持しながら再生を行う。一方、制御回路21は、ステップS3で30%以上ではない、つまり30%未満であると判定した場合には、ステップS4Cで再生速度をCAV方式の2.5倍速(CAV2.5x)に設定して再生する。そして、制御回路21は、ステップS8、ステップS9の処理を実行後、ステップS10Cにおいて湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上である場合(YES)にはステップS11の処理へ移行し、30%以上ではない、つまり、湿度Hが30%未満である場合には、ステップS4Cの処理(つまり、CAV方式の2.5倍速に再生速度を設定する処理)へ移行する。
【0059】
上述の図6に示す制御方法では、ステップS3およびステップS10において湿度Hの判定基準として30%以上であるか否かにより判定しているが、30%以外の値(たとえば、20%、40%、50%など)を基準として設定してもよい。また、ステップS3およびステップS10の判定において、検出された湿度Hが30%である場合にYESの判定とならないように、30%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3およびステップS10において30%を超えるか否かにより判定した場合には、検出された湿度Hが30%の場合には30%を超えていないため、NOの判定処理になり、ステップS3ではステップS7へ処理を移行し、ステップS10ではステップS1の処理へ移行する。このように、ステップS3およびステップS10における湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。また、図6のステップS4CでCAV方式の倍速として2.5倍速を例示したが、光ディスク駆動装置の機能や使用環境によって、CLV方式の最小回転速度である4倍速より遅い他の倍速(たとえば、1.5倍速、3.5倍速など)に設定されていてもよい。
【0060】
実施例4の光ディスク駆動装置では、図6に示したように、再生速度に対して、湿度検出センサ19で検出された湿度Hが所定の値未満になった場合には再生方法をCLV方式からCAV方式に変更するようにしている。このような制御方法を採用することで、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、CLV方式ではなく、再生速度が一定で、回転速度がCLV方式での最小回転速度より遅いCAV方式で読み取るように制御するため、装置内の湿度環境に関わらずディスク再生速度を一定としている場合、または装置内の湿度環境によって光ディスクD1の読み取り方式が変更されない場合と比較してディスクスリップの発生をより効果的に防止することができる。
【0061】
以上、本発明に係る実施例1〜4およびその変形例に基づいて具体的に説明したが、本発明はこれらの実施例およびその変形例に限定されるものではなく、発明の要旨を逸脱しない範囲において種々の変形や変更が更に可能である。たとえば、実施例1、実施例2、または実施例4に示した制御方法と実施例3に示した制御方法とを組み合わせて光ディスク駆動装置1内で実行するようにしてもよい。つまり、湿度検出センサ19により検出された湿度Hの値に応じて、回転速度を実施例1、実施例2、または実施例4に示した制御方法により変更すると共に、実施例3に示した制御方法により回転速度の上限値を設けるようにしてもよい。また、実施例4に示した制御方法に、実施例1または実施例2に示したディスク起動時および/またはディスク停止時の制御方法の部分のみを追加して構成するようにしてもよい。つまり、湿度検出センサ19により検出された湿度Hの値に応じて、読み取り方式をCLV、CAVのいずれかの回転制御方法を設定すると共に、ディスク起動時および/またはディスク停止時においては、実施例1または実施例2に示した制御方法を採用する構成としてもよい。また、実施例1または実施例2に示したディスク起動時の制御方法を、ディスク停止時の制御方法のように変更してもよい。つまり、実施例1または実施例2に示したディスク起動時の目標回転数を段階的に設定し、目標回転数に到達するたびに、更に速い目標回転数に変更していき、最終的に所望の起動目標回転数となるようにしてもよい。
【0062】
また、上述した実施例1〜4およびその変形例では、湿度検出センサ19の設置される位置に関しては特に限定していないが、光ディスクとターンテーブル15の周辺部の湿度が検出できる場所に設置されることが好ましい。なお、光ディスクD1の回転による風が湿度検出センサ19により検出される湿度に影響を与えると考えられる場合には、制御回路21により光ディスクD1の回転が停止している時に湿度検出センサ19で湿度を検出された値を予め取得しておき、光ディスクD1の再生中、ディスク起動時、ディスク停止時の湿度として代用するようにしてもよい。
【0063】
また、上述した実施例1〜4およびその変形例で説明した光ディスク駆動装置1の制御回路21による制御方法のすべてまたは一部をプログラムによって構成し、このプログラムを情報処理装置(コンピュータ)にインストールすることで上述した機能を備えた光ディスク駆動装置1を実現するようにしてもよい。なお、これらのプログラムを実行可能な状態で記録した媒体からコンピュータに直接インストールすることも可能であるが、ネットワーク経由で遠隔にあるコンピュータにインストールしてもよい。
【符号の説明】
【0064】
1・・・光ディスク駆動装置(ディスク駆動装置の一例)、15・・・ターンテーブル、19・・・湿度検出センサ(湿度検出部の一例)、21・・・制御回路(ディスク回転速度制御部の一例)、D1・・・光ディスク(ディスクの一例)
【技術分野】
【0001】
本発明は、ディスク駆動装置、ディスク駆動方法、及びプログラムに関する。
【背景技術】
【0002】
光ディスク装置は、映像信号および音響信号の記録、再生に広く利用されている。近年、光ディスク装置は、より多くのデータを記録させるために高密度化された光ディスクからデータを速く読み取るための高速化がなされている。そのため、光ディスク装置における読み取りの高速化を実現するにあたって、光ディスクを回転させるときの加速度、および減速時の加速度も次第に大きくなっている。光ディスクを回転させるための加速度が次第に大きくなる状況下では、光ディスクを載置するターンテーブルと光ディスクの間に、これらの摩擦による削れカス(たとえば、ポリカーボネート粉など)、または外部から混入した塵などの異物等が存在すると、ディスクスリップが発生することがある。
【0003】
図7は、ディスクスリップが発生する状況を説明するための図である。図7の(A)に示すように、光ディスクD1とターンテーブルTの間に異物Pが存在すると、光ディスクD1とターンテーブルTの間の摩擦力が弱まることでディスクスリップが発生する。また、図7の(B)に示すように、光ディスク装置内が低湿度環境下の場合には、静電気Eの影響により図7の(A)に比べて多量の異物Pが吸い集められ、ディスクスリップがより発生しやすい状況となる。
【0004】
上述したディスクスリップが発生することに起因した問題としては次のようなものがある。たとえば、光ディスクD1のディスク起動時にディスクスリップが発生した場合には、所定時間内に光ディスクD1が所定回転数に達しないこととなり、再生動作に移行できない、すなわち光ディスクD1が再生できるまでに時間がかかるという問題が生じる。また、光ディスクD1の再生中にディスクスリップが発生した場合には、光ディスクD1の内周、外周間でサーチする動作が困難となる。また、光ディスクD1の再生動作から停止動作に移行する際にディスクスリップが発生した場合には、光ディスクD1が停止するまでの時間は、ディスクスリップが発生していない状態時と比較して停止するまでの時間が余計にかかるという問題が生じる。また、ディスクスリップが発生しやすい状況下では、ターンテーブルTと光ディスクD1の間にこれらの摩擦による削れカスが発生しやすくなり、この削れカスによってディスクスリップが更に発生しやすい状況を生み出すという悪循環に陥ってしまうという問題が生じる。
【0005】
ディスクスリップに起因する問題に対応するものとして、光ピックアップの移動に伴うスピンドルモータの加減速発生時に、光ピックアップを移動させる距離が所定の値より大きい場合に、移動させる距離を所定の値以下に設定するように制御するものが知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−149653号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に開示される制御方法では、光ピックアップの移動距離を制限することでスピンドルモータを加減速する際に発生するトルクを小さくすることで、ディスクスリップの発生を防止するようにしている。しかしながら、特許文献1に開示される制御方法は、光ディスク装置が使用される環境(たとえば湿度環境など)によっては、ディスクスリップを防止できない場合がある。
【0008】
本発明は、ディスクスリップの発生をより効果的に防止することができるディスク駆動装置、ディスク駆動方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一側面は、ディスクが載ったターンテーブルを回転させるディスク駆動装置であって、自装置内の湿度を検出する湿度検出部と、湿度検出部により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるディスク回転速度制御部と、を備えるものである。
【0010】
また、上述の構成に加えて、ディスク回転速度制御部は、湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、通常の再生動作として設定されたディスクの回転速度よりも遅い回転速度に変更することが好ましい。
【0011】
また、上述の構成のいずれかに加えて、ディスク回転速度制御部は、湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、通常の再生動作として設定されたディスクの上限回転速度よりも遅い上限回転速度に変更することが好ましい。
【0012】
また、上述の構成のいずれかに加えて、前記ディスク回転速度制御部は、ディスクの読み取り方式としてCLV(Constant Liner Velocity)方式を採用しており、湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、CAV(Constant Angular Velocity)方式に変更することが好ましい。
【0013】
また、上述の構成のいずれかに加えて、ディスク回転速度制御部は、湿度検出部により検出された湿度に応じて、ディスクの起動時の目標回転数を変化させることが好ましい。
【0014】
また、上述の構成のいずれかに加えて、ディスク回転速度制御部は、湿度検出部により検出された湿度に応じて、ディスクの停止時の目標回転数を段階的に下げながら停止制御を行うようにすることが好ましい。
【0015】
また、本発明の一側面は、上述したディスク駆動装置が実行するディスク駆動方法であって、湿度検出部により、自装置内の湿度を検出するステップと、ディスク回転速度制御部により、湿度検出部により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるステップと、を有するものである。
【0016】
また、本発明の一側面は、コンピュータを、上述したディスク駆動装置として機能させるためのプログラムであって、自装置内の湿度を検出する湿度検出手段と、湿度検出手段により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるディスク回転速度制御手段、として機能させるためのプログラムである。
【発明の効果】
【0017】
本発明によれば、ディスクスリップの発生をより効果的に防止することができるディスク駆動装置、ディスク駆動方法、及びプログラムを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施例1に係る光ディスク駆動装置の概略構成を示す図である。
【図2】図1に示す光ディスク駆動装置の制御系について示したブロック図である。
【図3】図1に示す光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図4】本発明の実施例2に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図5】本発明の実施例3に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図6】本発明の実施例4に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。
【図7】ディスクスリップが発生する状況を説明するための図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施するための形態(実施例)を図面に基づいて説明する。
【実施例1】
【0020】
図1は、本発明の実施例1に係る光ディスク駆動装置1の概略構成を示す図である。光ディスク駆動装置1は、ケース11と、挿入口12と、センサ13と、スピンドルモータ14と、ターンテーブル15と、搬送ローラ16と、ディスクガイド17と、ローディングモータ18と、湿度検出センサ19(湿度検出部の一例)とを構成要素としており、光ディスクD1の再生動作、停止動作等を実行する。この光ディスク駆動装置1は、請求項のディスク駆動装置の一例であり、光ディスクD1の再生、停止機能を備えるが、他の機能(たとえば、光ディスクD1へのデータの書込み機能など)を備える、または他の装置の一部として構成されてもよい。
【0021】
ここで、光ディスクD1は、請求項のディスクの一例であるが、たとえば、プレス盤CD、プレス盤DVD、CD−R(Compact Disc Recordable)、CD−RW(Rewritable)、DVD−R(Digital Versatile Disc Recordable)、DVD+R、DVD−RW、DVD+RW、または、これらの2層式または両面式のディスク型記録媒体である。これらの光ディスクD1は、たとえば、プレスによりピットを形成して情報が記録されている、有機色素にレーザ光を照射して昇華させることによりピットを形成して情報が記録されている、または相変化材料にレーザ光を照射して結晶または非結晶の相を変化させることによりピットを形成して情報が記録されているものである。
【0022】
図1に示すように、光ディスク駆動装置1には光ディスクD1を挿入するために、筐体をなすケース11の正面パネルに挿入口12が設けられている。ケース11の内部には挿入口12から連続した搬送路が形成されている。また、ケース11の内部には、光ディスクD1の挿抜を検出するセンサ13と、光ディスクD1を上面と下面から挟み込むように、搬送ローラ16およびディスクガイド17とが設けられている。搬送ローラ16は、ローディングモータ18の駆動に応じて回転するように構成されている。
【0023】
スピンドルモータ14は、後述する制御回路21(図2)の制御に応じて、CLV(Constant Linear Velocity)方式、またはCAV(Constant Angular
Velocity)方式に基づいて、ターンテーブル15を回転駆動する。ここで、CLV方式とは、単位時間あたりに不図示の光ピックアップが読み取る光ディスクD1のトラック長を一定にするために、光ピックアップの位置に応じてスピンドルモータ14を制御してターンテーブル15の回転数(つまり光ディスクD1の回転数)を変化させて読み取る制御方式をいう。また、CAV方式とは、回転数を一定にして読み取る制御方式をいう。なお、スピンドルモータ14は、上述したCLV方式、CAV方式以外でも、たとえばZCLV(Zoned CLV)方式、ZCAV(Zoned CAV)方式、PCAV(Partial CAV)、またはそれ以外の回転制御方式に基づいて光ディスクD1を回転駆動するようにしてもよい。
【0024】
湿度検出センサ19は、ケース11内の湿度を検出する。なお、湿度検出センサ19で検出される湿度は、相対湿度、絶対湿度のいずれでもよい。湿度検出センサ19により検出された湿度情報は、後述する制御回路21へ出力される。なお、以下に示す実施例は相対湿度を用いた例を示している。
【0025】
図2は、図1に示す光ディスク駆動装置1の制御系について示したブロック図である。図2に示す制御回路21は、請求項の回転速度制御部の一例であり、たとえば、不図示のCPU(Central ProcessingUnit)、RAM(Random Access
Memory)、ROM(Read Only Memory)、I/F(Interface)等を備えて構成され、光ディスク駆動装置1の各部を制御する。CPUは、ROMに格納された処理プログラム等を読み出してRAMに展開して実行することにより光ディスク駆動装置1の全体の制御を行う。RAMは、CPUにより実行された処理プログラム、処理プログラムが実行される際に生じる処理結果、および入力データ等を所定の格納領域内にそれぞれ格納する。ROMは、たとえば、半導体メモリで構成され、上述した処理プログラムやデータ等が予め記憶されている。
【0026】
モータドライバ22は、制御回路21の制御によりスピンドルモータ14の加減速を行う。モータドライバ22は、制御回路21から供給される回転指令信号の電圧値(ここでは3.3Vとする)の中間電圧を基準電圧(ここでは1.65Vとする)とし、制御回路21から供給される回転指令信号の電圧値が高い場合には加速動作を、低い場合には減速動作を行う。これにより、制御回路21から供給される回転指令信号の電圧値と基準電圧値との差分の絶対値が大きければ大きいほど、スピンドルモータ14に流れる電流値が大きくなり、スピンドルモータ14に大きなトルクを発生させることができる。
【0027】
(光ディスク駆動装置1の動作)
図1で示した挿入口12に光ディスクD1が挿入されると、センサ13により光ディスクD1の挿入を検知した検出信号が制御回路21に出力される。制御回路21は、センサ13からの検出信号に応じてローディングモータ18を正転駆動させる。ローディングモータ18の駆動に応じて搬送ローラ16が回転し、光ディスクD1はケース1内部の搬送路に沿ってケース11の奥へ搬送される。そして、図示しないセンサにより光ディスクD1の奥端部が検出されると、その検出信号が制御回路21に出力され、この出力を受けて制御回路21によりローディングモータ18の正転駆動が停止される。これにより、光ディスクD1は、挿入口2から所定の収容位置にまで搬送され、保持される。
【0028】
制御回路21は、不図示の操作部から光ディスクD1の再生を指示する信号が出力されると、スピンドルモータ14を駆動させる。スピンドルモータ14が駆動することでターンテーブル15が回転し、ターンテーブル15上に載置された光ディスクD1も回転する。また、制御回路21は、不図示の操作部から光ディスクD1を排出する信号が出力されると、ローディングモータ18を反転駆動させて、光ディスクD1をケース11の挿入口2へと搬送する。そして、制御回路21は、センサ13により光ディスクD1の手前側の端部が排出位置に達したことを検出した時点でローディングモータ18を停止させる。
【0029】
制御回路21は、光ディスクD1を停止状態から再生状態にする場合、及び再生状態から停止状態にする場合に、最大の回転指令信号をモータドライバ22へ出力して制御を行う。また、制御回路21は、光ディスクD1を再生する際には、加速電圧でモータドライバ22を加速させ、スピンドルモータ4の回転数が所定の値(たとえば、2500rpm)に達した場合には、回転指令信号の電圧値を基準電圧付近に維持する。そして、制御回路21は、光ディスクD1を停止させる際には、減速電圧でモータドライバ22を減速させて、スピンドルモータ14の回転を停止させる。
【0030】
また、制御回路21は、湿度検出センサ19により検出された湿度に基づいてスピンドルモータ14の回転速度を制御する。以下、光ディスク駆動装置1における光ディスクD1再生時のスピンドルモータ4の制御動作について説明する。なお、制御回路21は、光ディスクD1からの読み取り方式としてCLV方式を採用し、1倍速(CLV1x)、4倍速(CLV4x)のそれぞれの再生速度にスピンドルモータ14を制御して設定できるものとする。
【0031】
図3は、図1に示す光ディスク駆動装置1の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。図3に示すように、光ディスク駆動装置1で不図示の操作部から光ディスクD1の再生を開始する信号が出力されると、光ディスク回転速度制御処理が開始される(再生開始)。
【0032】
ステップS1では、制御回路21は、CLV方式であって4倍速の再生速度(CLV4x)に設定して再生を開始する。ステップS2では、制御回路21は、湿度検出センサ19により検出された光ディスク駆動装置1内の湿度Hを取得する。ステップS3では、制御回路21は、湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上である場合(YES)にはステップS4に移行し、30%以上ではない場合、つまり30%未満である場合(NO)にはステップS7に移行する。
【0033】
ステップS4では、制御回路21は、CLV方式であって4倍速の再生速度(CLV4x)を維持して再生を続行する。ステップS5では、制御回路21は、ステップS2で湿度Hを取得してから所定時間tが経過したか否かを判定し、所定時間tが経過している場合(YES)にはステップS6へ移行し、経過していない場合(NO)には、所定時間tが経過するまでこの判定を続ける。所定時間tは、たとえば10分、15分など、光ディスク駆動装置1が使用される環境等に応じて適宜設定すればよい。ステップS6では、制御回路21は、再生動作が継続しているか否かを判定し、継続している場合(YES)には、ステップS2の処理へ戻り、継続していない場合(NO)にはステップS13の処理へ移行する。
【0034】
ステップS7では、制御回路21は、CLV方式であって、1倍速の再生速度(CLV1x)に設定して再生する。ステップS8では、制御回路21は、ステップS2で湿度Hを取得してから所定時間tが経過したか否かを判定し、所定時間tが経過している場合(YES)にはステップS9へ移行し、経過していない場合(NO)には、所定時間tが経過するまでこの判定を続ける。
【0035】
ステップS9では、制御回路21は、湿度検出センサ19により検出された光ディスク駆動装置1内の湿度Hを取得する。ステップS10では、制御回路21は、湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上である場合(YES)にはステップS1に戻り、30%以上ではない場合、つまり30%未満である場合(NO)にはステップS11に移行する。ステップS11では、制御回路21は、再生速度を維持して(つまり、CLV1xの設定を維持)再生を続行する。ステップS12では、制御回路21は、再生動作が継続しているか否かを判定し、継続している場合(YES)には、ステップS8の処理へ戻り、継続していない場合(NO)にはステップS13の処理へ移行する。ステップS13では、制御回路21は、再生停止処理を実行する。
【0036】
上述の図3に示す制御方法では、制御回路21は、ステップS1において通常時の再生速度はCLV方式で4倍速として設定していたが、CLV方式での4倍速以外の値(たとえば、CLV方式で8倍速、2倍速、或いは1倍速など)と設定しておいてもよい。たとえば、ステップS1において通常時の再生速度として1倍速と設定しておいてもよく、この場合は、ステップS3において湿度Hの値が所定値以上である場合には、ステップS4において4倍速の回転速度に変更されるため、通常時の設定より速い回転速度に変更されることになる。また、上述の図3に示す制御方法では、ステップS3およびステップS10において湿度Hの判定基準として30%以上であるか否かにより判定しているが、30%以外の値(たとえば、20%、40%、50%など)を基準として設定してもよい。また、ステップS3およびステップS10の判定において、検出された湿度Hが30%である場合にYESの判定とならないように、30%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3およびステップS10において30%を超えるか否かにより判定した場合には、検出された湿度Hが30%の場合には30%を超えていないため、NOの判定処理になり、ステップS3ではステップS7へ処理を移行し、ステップS10ではステップS1の処理へ移行する。このように、ステップS3およびステップS10における湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。
【0037】
以上のように、この光ディスク駆動装置1では、通常時の再生速度に対して湿度Hの値が所定値(上述の例では30%)以上であるか否かによって、再生速度を所定の固定倍速(CLV1xまたはCLV4x)に変更するように制御している。
【0038】
このように再生速度を制御することで、湿度Hの値が所定値以上ではない、つまり所定値未満である場合には、通常時の再生速度である4倍速ではなく、1倍速の回転速度となり、通常時の設定より遅い回転数に変更される。このように、光ディスク駆動装置1内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、ディスク回転速度が通常より遅い設定に変更されるため、装置内の湿度環境に関わらず再生時のディスク回転速度を設定している場合と比較してディスクスリップの発生をより効果的に防止することが可能となる。
【0039】
また、ディスク起動時の目標回転数が制御回路21により予め設定されている場合に、この目標回転数に対して次のような制御をするようにしてもよい。たとえば、制御回路21により通常時の起動目標回転数が2000rpmと設定されており、湿度検出センサ19から検出された湿度Hが制御回路21により所定の値以上(たとえば湿度30%以上)であると判定された場合には、通常時の起動目標回転数と同一である2000rpmとし、所定の値未満(たとえば湿度30%未満)であると判定された場合には、起動目標回転数は1000rpmとなるように制御するようにしてもよい。このような制御方法を採用すれば、光ディスク駆動装置1内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、通常時に設定されている起動目標回転数より低い起動目標回転数に変更されるため、装置内の湿度環境に関わらずディスク起動時の目標回転数を一定としている場合と比較してディスクスリップの発生をより効果的に防止することが可能となる。
【0040】
また、ディスク停止動作時の停止目標回転数が制御回路21により予め設定されている場合には、この停止目標回転数に対して次のような制御をするようにしてもよい。たとえば、制御回路21により通常時の停止目標回転数が0rpmと設定されており、湿度検出センサ19から検出された湿度Hが制御回路21により所定の値以上(たとえば湿度30%以上)であると判定された場合には、通常時の停止目標回転数と同一である0rpmとし、所定の値未満(たとえば湿度30%未満)であると判定された場合には、停止目標回転数を段階的に設定して停止させるようにしてもよい。
【0041】
ここで、停止目標回転数を段階的に設定する方法としては、たとえば、制御回路21により再生中の回転数より所定の回転数(たとえば100rpm)下げた停止目標回転数を設定し、スピンドルモータ14がこの停止目標回転数となるたびに、上述した所定の回転数を減じた回転数を段階的に設定していき、最終的な停止目標回転数が0rpmとなるようにする。このような制御方法を採用すれば、光ディスク駆動装置1内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、回転を停止させるためのモータドライバ22での減速が段階的に行われるため、装置内の湿度環境に関わらずディスク停止時の目標回転数を一定としている場合と比較して、ディスク停止時に発生するディスクスリップの発生をより効果的に防止することが可能となる。
【実施例2】
【0042】
本発明の実施例2について説明する。実施例2では、通常時に設定されている再生速度に対して、湿度検出センサ19で検出された湿度Hの値毎に所定の係数演算式を用いて再生速度を変化させる。なお、実施例2は、再生速度の制御方法は異なるが、実施例1で説明した光ディスク駆動装置1と同様の構成であるため、これらの図示および説明は省略する。
【0043】
図4は、本発明の実施例2に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。なお、実施例1と同一の動作に関しては図3と同一のステップ番号を付し、その説明を省略、または簡略化して説明する。
【0044】
ステップS3Aでは、制御回路21は、湿度検出センサ19で検出された湿度Hが50%以上であるか否かを判定し、湿度Hが50%以上ではない(つまり、湿度Hが50%未満である)場合には、ステップS7Aに移行する。ステップS7Aでは、制御回路21は、再生速度Vを次の係数演算式(1)に当てはめて設定する。
再生速度V=4倍速×湿度H/50・・・(1)
ここで、湿度Hの単位は%であり、再生速度Vは1倍速以上の値とする。
【0045】
そして、制御回路21は、ステップS8、ステップS9では実施例1と同様の処理を実行する。ステップS10Aでは、制御回路21は、湿度検出センサ19で検出された湿度Hが50%以上であるか否かを判定し、50%以上である場合(YES)には、ステップS1の処理へ戻る(再生速度を4倍速に設定する)。一方、湿度Hが50%以上ではない(つまり、湿度Hが50%未満である)場合には、ステップS11Aに移行する。ステップS11Aでは、制御回路21は、再生速度Vを維持して再生し、ステップS12では再生動作が継続されている間(YES)はステップS8の処理へ移行し、不図示の操作部から停止信号が制御回路21に出力された場合(NO)にはステップS13の処理へ移行し、再生停止処理を実行する。
【0046】
上述の図4に示す制御方法では、ステップS3AおよびステップS10Aにおいて湿度Hの判定基準として50%以上であるか否かにより判定しているが、50%以外の値(たとえば、30%、40%など)を基準として設定してもよい。また、ステップS3AおよびステップS10Aの判定において、検出された湿度Hが50%である場合にYESの判定とならないように、50%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3AおよびステップS10Aにおいて50%を超えるか否かにより判定した場合には、検出された湿度Hが50%の場合には50%を超えていないため、NOの判定処理になり、ステップS3AではステップS7Aへ処理を移行し、ステップS10AではステップS1の処理へ移行する。このように、ステップS3AおよびステップS10Aにおける湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。
【0047】
実施例2の光ディスク駆動装置では、図4に示したように、通常時の再生速度に対して、湿度検出センサ19で検出された湿度Hの値毎に所定の係数演算式を用いて再生速度を変化させるようにしている。このように再生速度を細かく制御することで、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、ディスク回転速度が通常より遅い設定に変更されるため、装置内の環境に関わらず再生時のディスク回転速度を設定している場合と比較してディスクスリップの発生をより効果的に防止することができる。また、実施例1のように固定の倍速を設定する場合と比較して、所定の係数演算式を用いるためより細かく再生速度を変化させることが可能となる。
【0048】
また、実施例2においても実施例1と同様に、図4に示した光ディスク駆動装置1内の湿度環境に応じて再生速度を変更させる方法は、再生速度以外にも適用可能である。すなわち、ディスク起動時の目標回転数が制御回路21により予め設定されている場合にはこの目標回転数に対して、次のような制御をするようにしてもよい。たとえば、通常時の起動目標回転数が2000rpmと設定されている場合で、制御回路21により湿度Hの値毎に上述した所定の係数演算式を用いて起動目標回転数を変化させるように制御してもよい。このような制御方法を採用すれば、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、通常時に設定されている起動目標回転数より低い起動目標回転数に変更されるため、装置内の環境に関わらずディスク起動時の目標回転数を一定としている場合と比較してディスクスリップの発生をより効果的に防止することができる。また、実施例1のように固定の倍速を設定する場合と比較して、所定の係数演算式を用いるためより細かくディスク起動時の目標回転数を変化させることが可能となる。
【0049】
また、ディスク停止動作時の停止目標回転数が制御回路21により予め設定されている場合には、この停止目標回転数に対して、次のような制御をするようにしてもよい。たとえば、通常時の停止目標回転数が0rpmと設定されている場合で、湿度検出センサ19で検出された湿度Hが制御回路21により所定の値以上(たとえば湿度50%以上、50%以外の値を設定してもよい)であると判定された場合には、通常時の停止目標回転数と同一である0rpmとし、所定の値未満(たとえば湿度50%未満)であると判定された場合には、停止目標回転数を段階的に設定して停止させるようにしてもよい。
【0050】
停止目標回転数を段階的に設定する方法としては、たとえば、再生中の回転数より所定の回転数(たとえば100rpm)下げた停止目標回転数を設定し、この停止目標回転数となるたびに、上述した所定の回転数を減じた回転数を段階的に設定していき、最終的な停止目標回転数が0rpmとなるようにする。このような制御方法を採用すれば、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、回転を停止させるためのモータドライバ22での減速が段階的に行われるため、装置内の環境に関わらずディスク停止時の目標回転数を一定としている場合と比較して、ディスク停止時に発生するディスクスリップの発生をより効果的に防止することが可能となる。
【実施例3】
【0051】
本発明の実施例3について説明する。実施例3では、湿度検出センサ19で検出された湿度Hが所定の値未満になった場合には、再生速度に対して上限値を設けるものである。なお、実施例3は、再生速度の制御方法は異なるが、実施例1で説明した光ディスク駆動装置1と同様の構成であるため、これらの図示および説明は省略する。
【0052】
図5は、本発明の実施例3に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。なお、実施例1と同一の動作に関しては図3と同一のステップ番号を付し、その説明を省略、または簡略化して説明する。
【0053】
ステップS3で、制御回路21により湿度検出センサ19で検出された湿度が30%以上であるか否かを判定し、30%以上ではない、つまり30%未満である場合(NO)にはステップS7Bに移行する。ステップS7Bでは、再生速度は4倍速のままであるが、再生速度に上限値(たとえば1500rpm)を設ける。
【0054】
上述の図5に示す制御方法では、制御回路21は、ステップS1において通常時の再生速度はCLV方式で4倍速として設定していたが、CLV方式での4倍速以外の値(たとえば、CLV方式で8倍速、2倍速、或いは1倍速など)と設定しておいてもよい。また、上述の図5に示す制御方法では、ステップS3およびステップS10において湿度Hの判定基準として30%以上であるか否かにより判定しているが、30%以外の値(たとえば、20%、40%、50%など)を基準として設定してもよい。また、ステップS3およびステップS10の判定において、検出された湿度Hが30%である場合にYESの判定とならないように、30%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3およびステップS10において30%を超えるか否かにより判定した場合には、検出された湿度Hが30%の場合には30%を超えていないため、NOの判定処理になり、ステップS3ではステップS7へ処理を移行し、ステップS10ではステップS1の処理へ移行する。このように、ステップS3およびステップS10における湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。
【0055】
実施例3の光ディスク駆動装置では、図5に示したように、再生速度に対して、湿度Hの値が所定の値未満になった場合には再生速度に上限値を設定するようにしている。このような制御方法を採用すれば、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、設定されている再生速度が上限値より速くならないように制御されるため、装置内の湿度環境に関わらずディスク再生速度を一定としている場合と比較してディスクスリップの発生をより効果的に防止することが可能となる。
【実施例4】
【0056】
本発明の実施例4について説明する。実施例4では、湿度検出センサ19で検出された湿度Hの値が所定の値未満になった場合には、再生方式をCLV方式からCAV方式へ変更するものである。ここでの再生速度設定例としては、CLV方式における最小回転速度に対して、CAV方式での回転速度がこれ以下となる値に設定すればよい。たとえば、CLV方式の4倍速における最小回転速度以下とするためには、CAV方式の再生速度は4倍速以下の値とすればよい。なお、実施例4は、再生速度の制御方法は異なるが、実施例1で説明した光ディスク駆動装置1と同様の構成であるため、これらの図示および説明は省略する。
【0057】
図6は、本発明の実施例4に係る光ディスク駆動装置の再生時に実行される光ディスク回転速度制御処理を示すフローチャートである。なお、実施例1と同一の動作に関しては図3と同一のステップ番号を付し、その説明を省略、または簡略化して説明する。
【0058】
ステップS3では、制御回路21は、湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上であると判定した場合(YES)には、ステップS7Cで再生速度をCLV方式の4倍速の設定を維持しながら再生を行う。一方、制御回路21は、ステップS3で30%以上ではない、つまり30%未満であると判定した場合には、ステップS4Cで再生速度をCAV方式の2.5倍速(CAV2.5x)に設定して再生する。そして、制御回路21は、ステップS8、ステップS9の処理を実行後、ステップS10Cにおいて湿度検出センサ19で検出された湿度Hが30%以上であるか否かを判定し、30%以上である場合(YES)にはステップS11の処理へ移行し、30%以上ではない、つまり、湿度Hが30%未満である場合には、ステップS4Cの処理(つまり、CAV方式の2.5倍速に再生速度を設定する処理)へ移行する。
【0059】
上述の図6に示す制御方法では、ステップS3およびステップS10において湿度Hの判定基準として30%以上であるか否かにより判定しているが、30%以外の値(たとえば、20%、40%、50%など)を基準として設定してもよい。また、ステップS3およびステップS10の判定において、検出された湿度Hが30%である場合にYESの判定とならないように、30%を超えるか否かにより判定するようにしてもよい。つまり、ステップS3およびステップS10において30%を超えるか否かにより判定した場合には、検出された湿度Hが30%の場合には30%を超えていないため、NOの判定処理になり、ステップS3ではステップS7へ処理を移行し、ステップS10ではステップS1の処理へ移行する。このように、ステップS3およびステップS10における湿度の判定において基準値を含むか否かは適宜設計により変更することも可能である。また、図6のステップS4CでCAV方式の倍速として2.5倍速を例示したが、光ディスク駆動装置の機能や使用環境によって、CLV方式の最小回転速度である4倍速より遅い他の倍速(たとえば、1.5倍速、3.5倍速など)に設定されていてもよい。
【0060】
実施例4の光ディスク駆動装置では、図6に示したように、再生速度に対して、湿度検出センサ19で検出された湿度Hが所定の値未満になった場合には再生方法をCLV方式からCAV方式に変更するようにしている。このような制御方法を採用することで、光ディスク駆動装置内が低湿度環境下で静電気が発生し、ターンテーブル15と光ディスクD1との間に異物が吸い集められて、ディスクスリップが発生しやすい状況となったとしても、CLV方式ではなく、再生速度が一定で、回転速度がCLV方式での最小回転速度より遅いCAV方式で読み取るように制御するため、装置内の湿度環境に関わらずディスク再生速度を一定としている場合、または装置内の湿度環境によって光ディスクD1の読み取り方式が変更されない場合と比較してディスクスリップの発生をより効果的に防止することができる。
【0061】
以上、本発明に係る実施例1〜4およびその変形例に基づいて具体的に説明したが、本発明はこれらの実施例およびその変形例に限定されるものではなく、発明の要旨を逸脱しない範囲において種々の変形や変更が更に可能である。たとえば、実施例1、実施例2、または実施例4に示した制御方法と実施例3に示した制御方法とを組み合わせて光ディスク駆動装置1内で実行するようにしてもよい。つまり、湿度検出センサ19により検出された湿度Hの値に応じて、回転速度を実施例1、実施例2、または実施例4に示した制御方法により変更すると共に、実施例3に示した制御方法により回転速度の上限値を設けるようにしてもよい。また、実施例4に示した制御方法に、実施例1または実施例2に示したディスク起動時および/またはディスク停止時の制御方法の部分のみを追加して構成するようにしてもよい。つまり、湿度検出センサ19により検出された湿度Hの値に応じて、読み取り方式をCLV、CAVのいずれかの回転制御方法を設定すると共に、ディスク起動時および/またはディスク停止時においては、実施例1または実施例2に示した制御方法を採用する構成としてもよい。また、実施例1または実施例2に示したディスク起動時の制御方法を、ディスク停止時の制御方法のように変更してもよい。つまり、実施例1または実施例2に示したディスク起動時の目標回転数を段階的に設定し、目標回転数に到達するたびに、更に速い目標回転数に変更していき、最終的に所望の起動目標回転数となるようにしてもよい。
【0062】
また、上述した実施例1〜4およびその変形例では、湿度検出センサ19の設置される位置に関しては特に限定していないが、光ディスクとターンテーブル15の周辺部の湿度が検出できる場所に設置されることが好ましい。なお、光ディスクD1の回転による風が湿度検出センサ19により検出される湿度に影響を与えると考えられる場合には、制御回路21により光ディスクD1の回転が停止している時に湿度検出センサ19で湿度を検出された値を予め取得しておき、光ディスクD1の再生中、ディスク起動時、ディスク停止時の湿度として代用するようにしてもよい。
【0063】
また、上述した実施例1〜4およびその変形例で説明した光ディスク駆動装置1の制御回路21による制御方法のすべてまたは一部をプログラムによって構成し、このプログラムを情報処理装置(コンピュータ)にインストールすることで上述した機能を備えた光ディスク駆動装置1を実現するようにしてもよい。なお、これらのプログラムを実行可能な状態で記録した媒体からコンピュータに直接インストールすることも可能であるが、ネットワーク経由で遠隔にあるコンピュータにインストールしてもよい。
【符号の説明】
【0064】
1・・・光ディスク駆動装置(ディスク駆動装置の一例)、15・・・ターンテーブル、19・・・湿度検出センサ(湿度検出部の一例)、21・・・制御回路(ディスク回転速度制御部の一例)、D1・・・光ディスク(ディスクの一例)
【特許請求の範囲】
【請求項1】
ディスクが載ったターンテーブルを回転させるディスク駆動装置であって、
自装置内の湿度を検出する湿度検出部と、
上記湿度検出部により検出された湿度に応じて、上記ターンテーブルで回転させる上記ディスクの回転速度を変化させるディスク回転速度制御部と、
を備えることを特徴とするディスク駆動装置。
【請求項2】
請求項1に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、通常の再生動作として設定された前記ディスクの回転速度よりも遅い回転速度に変更することを特徴とするディスク駆動装置。
【請求項3】
請求項1または2に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された自装置内の湿度が所定の値以下の場合には、通常の再生動作として設定された前記ディスクの上限回転速度よりも遅い上限回転速度に変更することを特徴とするディスク駆動装置。
【請求項4】
請求項1に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記ディスクの読み取り方式としてCLV(Constant Liner Velocity)方式を設定しており、前記湿度検出部により検出された自装置内の湿度が所定の値以下の場合には、CAV(Constant Angular Velocity)方式に変更することを特徴とするディスク駆動装置。
【請求項5】
請求項1から請求項4いずれか1項に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された湿度に応じて、前記ディスクの起動時の目標回転数を変化させることを特徴とするディスク駆動装置。
【請求項6】
請求項1から請求項5いずれか1項に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された湿度に応じて、前記ディスクの停止時の目標回転数を段階的に下げながら停止制御を行うようにすることを特徴とするディスク駆動装置。
【請求項7】
湿度検出部、ディスク回転速度制御部を備え、ディスクが載ったターンテーブルを回転させるディスク駆動装置が実行するディスク駆動方法であって、
上記湿度検出部により、自装置内の湿度を検出するステップと、
上記ディスク回転速度制御部により、上記湿度検出部により検出された湿度に応じて、上記ターンテーブルで回転させる上記ディスクの回転速度を変化させるステップと、
を有することを特徴とするディスク駆動方法。
【請求項8】
コンピュータを、
自装置内の湿度を検出する湿度検出手段と、
上記湿度検出手段により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるディスク回転速度制御手段、として機能させるためのプログラム。
【請求項1】
ディスクが載ったターンテーブルを回転させるディスク駆動装置であって、
自装置内の湿度を検出する湿度検出部と、
上記湿度検出部により検出された湿度に応じて、上記ターンテーブルで回転させる上記ディスクの回転速度を変化させるディスク回転速度制御部と、
を備えることを特徴とするディスク駆動装置。
【請求項2】
請求項1に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された自装置内の湿度が所定の値未満の場合には、通常の再生動作として設定された前記ディスクの回転速度よりも遅い回転速度に変更することを特徴とするディスク駆動装置。
【請求項3】
請求項1または2に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された自装置内の湿度が所定の値以下の場合には、通常の再生動作として設定された前記ディスクの上限回転速度よりも遅い上限回転速度に変更することを特徴とするディスク駆動装置。
【請求項4】
請求項1に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記ディスクの読み取り方式としてCLV(Constant Liner Velocity)方式を設定しており、前記湿度検出部により検出された自装置内の湿度が所定の値以下の場合には、CAV(Constant Angular Velocity)方式に変更することを特徴とするディスク駆動装置。
【請求項5】
請求項1から請求項4いずれか1項に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された湿度に応じて、前記ディスクの起動時の目標回転数を変化させることを特徴とするディスク駆動装置。
【請求項6】
請求項1から請求項5いずれか1項に記載のディスク駆動装置であって、
前記ディスク回転速度制御部は、
前記湿度検出部により検出された湿度に応じて、前記ディスクの停止時の目標回転数を段階的に下げながら停止制御を行うようにすることを特徴とするディスク駆動装置。
【請求項7】
湿度検出部、ディスク回転速度制御部を備え、ディスクが載ったターンテーブルを回転させるディスク駆動装置が実行するディスク駆動方法であって、
上記湿度検出部により、自装置内の湿度を検出するステップと、
上記ディスク回転速度制御部により、上記湿度検出部により検出された湿度に応じて、上記ターンテーブルで回転させる上記ディスクの回転速度を変化させるステップと、
を有することを特徴とするディスク駆動方法。
【請求項8】
コンピュータを、
自装置内の湿度を検出する湿度検出手段と、
上記湿度検出手段により検出された湿度に応じて、ターンテーブルで回転させるディスクの回転速度を変化させるディスク回転速度制御手段、として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−258263(P2011−258263A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−130830(P2010−130830)
【出願日】平成22年6月8日(2010.6.8)
【出願人】(508209990)J&Kカーエレクトロニクス株式会社 (98)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月8日(2010.6.8)
【出願人】(508209990)J&Kカーエレクトロニクス株式会社 (98)
【Fターム(参考)】
[ Back to top ]