
ディスプレイ上で危険な飛行ゾーン領域を識別するための方法およびシステム
【課題】非危険領域のかなりのパーセンテージを含むことのない危険な天気を表すためのシステムおよび方法を提供する。
【解決手段】典型的なシステム(38)は、レーダー反射データを三次元バッファに格納するメモリ(43)と、表示装置(44)と、メモリおよび表示装置とデータ通信するプロセッサ(42)とを含む。プロセッサは、三次元バッファに格納される一部のデータに基づいて2次元の形状を受け取り、次いで、形状のセンターを見つける。次いで、共通のポイントとしてセンターを共有する複数の領域で形状の最も離れたポイントを見つけ、最も離れたポイントに基づいて多角形を生成する。表示装置は、生成された多角形を表示する。形状は、三次元バッファに格納されるレーダー反射データから判断される危険な天気情報と関係している。表示装置は、航空機気象レーダー・ディスプレイである。
【解決手段】典型的なシステム(38)は、レーダー反射データを三次元バッファに格納するメモリ(43)と、表示装置(44)と、メモリおよび表示装置とデータ通信するプロセッサ(42)とを含む。プロセッサは、三次元バッファに格納される一部のデータに基づいて2次元の形状を受け取り、次いで、形状のセンターを見つける。次いで、共通のポイントとしてセンターを共有する複数の領域で形状の最も離れたポイントを見つけ、最も離れたポイントに基づいて多角形を生成する。表示装置は、生成された多角形を表示する。形状は、三次元バッファに格納されるレーダー反射データから判断される危険な天気情報と関係している。表示装置は、航空機気象レーダー・ディスプレイである。
【発明の詳細な説明】
【技術分野】
【0001】
[0001] 気象レーダー・システム・アルゴリズムは、危険な飛行ゾーン領域を決定するために開発された。
【背景技術】
【0002】
パイロットに危険な領域を示すことの1つのソリューションは、一連の接続線で問題の領域を囲むことである。一つのオプションは、危険領域を囲む単純なボックスであるが、それは危険ではない領域の多くを含み、したがって、安全に飛行できるであろう。第2のオプションは領域周辺でアウトラインを描画することであるが、それは時間とともに飛行機または天気の変化に伴い常に変化している形状であり、あまりに複雑な形状を作ることになる。
【0003】
[0002] 他のテクニックは、単純化した多角形を用いる。現在の簡略化された多角形技術は、再帰的追跡アルゴリズムを提案する。第1のステップは、オブジェクトのアウトラインをトレースすることである。次いで、再帰的アルゴリズムは、簡略化されたアウトラインを生成する新規な線が加えられることが可能であるかどうか確認するために各々のアウトラインポイントをアウトラインの他のポイントとチェックする。これは、どれくらい形状を単純化するかについて決定するために、各々の線に関する値を計算するためにアルゴリズムを走らせることを必要とする。再帰に加えてこれらの比較は、非常に計算強いアルゴリズムを作る。
【発明の概要】
【課題を解決するための手段】
【0004】
[0003] 本発明は、非危険領域のかなりのパーセンテージを含むことのない危険な領域をマークする。本発明は、危険なゾーンを誇張せずに境界スタンドを作る。
[0004] 典型的なシステムは、レーダー反射データを3次元バッファに格納するメモリと、表示装置と、メモリおよび表示装置とデータ通信するプロセッサとを含む。プロセッサは、3次元バッファのデータに基づいて2次元のイメージを生成し、次いで、それはイメージのいかなる形状のセンターを見つける。次いで、プロセッサは、共通のポイントとしてセンターを共有する複数の領域で各形状の最も離れたポイントを見つけ、最も離れたポイントに基づいて多角形を生成する。表示装置は、形状に関して生成された多角形を表示する。
【0005】
[0005] 本発明の一態様では、形状は、三次元バッファに格納されるレーダー反射データから判断される危険な天気情報と関係している。表示装置は、航空機気象レーダー・ディスプレイである。
【0006】
[0006] 本発明の別の態様では、プロセッサは、多角形を生成するために隣接した領域の最も離れたポイント間を線で接続する。
[0007] 本発明の更に別の態様では、プロセッサは、複数の領域の各々で形状の少なくとも2つの最も離れたポイントを見つける。
【0007】
[0008] 本発明の好適で別の実施形態は、以下の図面に関して以下に詳細に記載される。
【図面の簡単な説明】
【0008】
【図1】[0009] 図1は、本発明の実施形態により形成された典型的なシステムのブロック図である。
【図2】[0010] 図2は、図1に示されるシステムにより実行される典型的なプロセスを示しているフローチャートである。
【図3】図3は、図1に示されるシステムにより実行される典型的なプロセスを示しているフローチャートである。
【図4】[0011] 図4は、例示のデータと一緒に図2および3に示されたプロセスを視覚的に示す幾何学的な線図である。
【図5】図5は、例示のデータと一緒に図2および3に示されたプロセスを視覚的に示す幾何学的な線図である。
【発明を実施するための形態】
【0009】
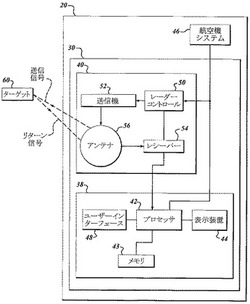
[0012] 図1は、より正確な飛行計画/経路天気情報を提供するために航空機20に実装される例示のシステム30を図示する。システム30は、表示プロセッサ42、メモリ43、表示装置44およびユーザ・インタフェース装置48を含むレーダー・ディスプレイシステム38、並びに、気象レーダー・システム40を含む。航空機20はまた、空気データ・コンピュータ(ADC)のような他の航空機システム46を包含し、それは、気象レーダー・システム40およびレーダー・ディスプレイシステム38と信号通信をする。表示プロセッサ42は、レーダー・システム40、表示装置44、他の航空機システム46、ユーザ・インタフェース装置48およびメモリ43に電気的に連結する。レーダー・システム40は、レーダー・コントローラ50、送信機52、レシーバ54およびアンテナ56を含む。レーダー・コントローラ50は、ユーザ・インタフェース48から受けた他のパイロット入力および選択されたレーダー・モードに基づいてアンテナ56を介して信号の送受信を実行するために送信機52およびレシーバ54制御し、ACDから受信した航空機データ(すなわち、高度、速度、位置、飛行方向、ロール、ヨー、ピッチ、など)、飛行管理システム(Flight Management System、FMS)、Inertial Navigation System(INS)および/または全地球位置測定システム(GPS)(他の航空機システム46)から受けた。
【0010】
[0013] 目標60が、レシーバ54へ戻るように差し向けられたレーダー信号と関連するエネルギーを拡散させるためにある場合、レーダー・システム40は、送信機52からのレーダー信号を送信し、アンテナ56によって空間に送信されたレーダー信号を差し向け、レシーバ54を有するリターン信号を検出する。好ましくは、レーダー・システム40は、リターン信号をデジタル化し、デジタル化された信号を表示プロセッサ42に送信する。表示プロセッサ42は、メモリ43の多次元バッファのストレージに関して受信されるリターン信号を解釈する。表示プロセッサ42は次いで、ユーザ・インタフェース装置48から送られるいかなる制御信号に基づき、または、レーダー・システム40からの信号に基づいて表示装置44上のプレゼンテーションのための2次元(または3次元)イメージを生成する。
【0011】
[0014] クリスチャンソンによって2009年12月12日に出願された米国特許出願の出願番号第12/640,976号(それは本願明細書にリファレンスとして組み入れられる)は、垂直に統合した反射(VIR)計算を使用して怪しい天気と怪しくない天気との間を区別する方法を開示する。
【0012】
[0015] VIRデータは、3次元バッファのセルのカラムにストアされた反射値の合計、またはセルの柱のカラムの値の統合を含む。プロセッサ42は、反射値および高度の製品を垂直に統合し、各々ある力に上昇する。
【0013】
[0016] ある実施形態では、プロセッサ42は、表示リクエストに基づいて危険な天気と関連する0以上のグループまたは形状を最初に識別する。形状が存在する場合、プロセッサ42は、次いで、形状のセンターに基づいていくつかの領域または象限のうちの1つに、各々の識別された形状(関連する危険なセル)の各々のポイントを配置する。次いで、プロセッサ42は、各々の領域/象限において、中心から最も離れて間隔をおいて配置されたポイントだとわかる。各々の領域/象限の域外のポイントは、次いで、形状を囲む単純化された多角形に結果としてなっている線と関係がある。
【0014】
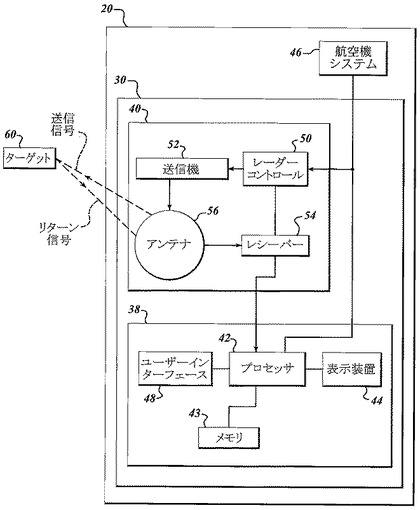
[0017] 図2は、多角形として危険な天気イメージを囲むかまたはより簡単に描写するプロセス80を例示する。第一に、ブロック84で、0以上の危険な天気エンティティの形状は、三次元バッファに格納されるレーダー・ソース・データから生成される。危険な天気の形状は、危険な天気として確認される(すなわち、VIRまたは他の算出に基づいて)三次元バッファにあるレーダー反射データと全て関係している複数のピクセルを含む。次いで、ブロック86で、各々の危険な天気形状の中央が、決定される。ブロック88で、各々の複数の領域または象限で、中心から最もはるかに間隔をおいて配置される危険な天気形状のピクセルは、決定される。最後に、ブロック90で、離れて最も遠いものであると決定されるピクセルが、形状の代わりにディスプレイに示される多角形をつくる隣接した領域/象限の他の最もはるかに離れたピクセルに接続される。
【0015】
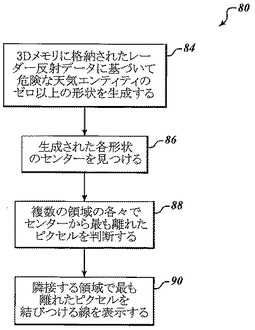
[0018] 図3は、図2のブロック88で実行されるプロセスの実施形態を例示する。第一に、ブロック94で、空の最も離れたテーブルエントリは、各々の領域のためにつくられる。ブロック96で、ピクセル位置は、それが8つの領域のいずれにあるかについて決定するために調べられる。次にブロック98で、各々の領域において、ピクセルの形状は、どれが中心から最もはるかに間隔をおいて配置されるかについて決定するために、最も遠いテーブルの現在の最も遠いピクセルと比較される。最も遠いテーブルは、この時に更新される。ブロック100で、特定の領域と関係している前のルールに基づいて、領域に関する最も遠いタイも、分解される。形状の全てのピクセルが分析されるまで、ブロック102で、上のステップは繰り返される。
【0016】
[0019] 本発明の効果は、それが非常に急速で、処理時間の一貫した量を必要とするということである。形状は、二次元のアレイに効果的に格納される。ある実施形態では、次いで2Dバッファに処理される一組ソース(例えば、乱気流データまたはVIRデータ)から、形状に関するデータは、集められる。したがって、あらゆるポイントは、形状のいずれかの一部でもある。質量中心は、オブジェクトのあらゆるポイントのXおよびYを加えることにより、および、オブジェクトのポイントの数によって分割することにより、単に判断されることができる。
【0017】
[0020] 次のステップでは、センターポイントに対する比較は、ポイントが8つの象限の中のいずれにあるかについて判断するのに用いられる。どんな数の象限を用いることができるけれども、8は単純性および速度のために選ばれた。単純な最小/最大比較は、特定の象限に関して前に選択された遠くのポイントに対してされる。
【0018】
[0021] ある実施形態では、各々の領域の2つの最も遠いポイントは、ちょうど一つのポイントの代わりに周囲の多角形の一部として選ばれる。
[0022] 図4は、危険な天気形状120を示す。図4に示される画像は、レーダー表示装置上のユーザに、表示のために示されないのが好ましい。第一に、形状120の中央124が、決定される。それから、領域の境界が、識別される。各々の領域において、中心124から離れた形状120の最も遠いポイント126が、決定される。多角形128は、隣接した領域の一番遠いポイント126を接続することによって、つくられる。
【0019】
[0023] 図5は、図4の領域130の引き延ばした図を示す。ボックスは、形状120の外側の境界でピクセルを表す。領域のピクセルは、最も遠いテーブルに格納される最後のピクセルに対して分析される。未分析のピクセルが、最も遠いテーブルに格納される最後のピクセルよりセンター124からより離れている場合、新しく分析されたピクセルは、テーブルの前のピクセルを置換する。比較が、全ての比較終了後結果的にタイとなる場合、所定のタイ破壊ルールが適用される。例示のタイ破壊ルールは、領域130に関して次の通りである:
- より小さいx軸値を有するピクセルが勝つ、
- x軸値が同等の場合、より小さいy軸値を有するものが勝つ。
【0020】
[0024] 他の複数のタイ破壊ルール/アルゴリズムを使うことができる。排他的なプロパティまたは特権を主張する発明の実施形態は、以下のように定義される。
【技術分野】
【0001】
[0001] 気象レーダー・システム・アルゴリズムは、危険な飛行ゾーン領域を決定するために開発された。
【背景技術】
【0002】
パイロットに危険な領域を示すことの1つのソリューションは、一連の接続線で問題の領域を囲むことである。一つのオプションは、危険領域を囲む単純なボックスであるが、それは危険ではない領域の多くを含み、したがって、安全に飛行できるであろう。第2のオプションは領域周辺でアウトラインを描画することであるが、それは時間とともに飛行機または天気の変化に伴い常に変化している形状であり、あまりに複雑な形状を作ることになる。
【0003】
[0002] 他のテクニックは、単純化した多角形を用いる。現在の簡略化された多角形技術は、再帰的追跡アルゴリズムを提案する。第1のステップは、オブジェクトのアウトラインをトレースすることである。次いで、再帰的アルゴリズムは、簡略化されたアウトラインを生成する新規な線が加えられることが可能であるかどうか確認するために各々のアウトラインポイントをアウトラインの他のポイントとチェックする。これは、どれくらい形状を単純化するかについて決定するために、各々の線に関する値を計算するためにアルゴリズムを走らせることを必要とする。再帰に加えてこれらの比較は、非常に計算強いアルゴリズムを作る。
【発明の概要】
【課題を解決するための手段】
【0004】
[0003] 本発明は、非危険領域のかなりのパーセンテージを含むことのない危険な領域をマークする。本発明は、危険なゾーンを誇張せずに境界スタンドを作る。
[0004] 典型的なシステムは、レーダー反射データを3次元バッファに格納するメモリと、表示装置と、メモリおよび表示装置とデータ通信するプロセッサとを含む。プロセッサは、3次元バッファのデータに基づいて2次元のイメージを生成し、次いで、それはイメージのいかなる形状のセンターを見つける。次いで、プロセッサは、共通のポイントとしてセンターを共有する複数の領域で各形状の最も離れたポイントを見つけ、最も離れたポイントに基づいて多角形を生成する。表示装置は、形状に関して生成された多角形を表示する。
【0005】
[0005] 本発明の一態様では、形状は、三次元バッファに格納されるレーダー反射データから判断される危険な天気情報と関係している。表示装置は、航空機気象レーダー・ディスプレイである。
【0006】
[0006] 本発明の別の態様では、プロセッサは、多角形を生成するために隣接した領域の最も離れたポイント間を線で接続する。
[0007] 本発明の更に別の態様では、プロセッサは、複数の領域の各々で形状の少なくとも2つの最も離れたポイントを見つける。
【0007】
[0008] 本発明の好適で別の実施形態は、以下の図面に関して以下に詳細に記載される。
【図面の簡単な説明】
【0008】
【図1】[0009] 図1は、本発明の実施形態により形成された典型的なシステムのブロック図である。
【図2】[0010] 図2は、図1に示されるシステムにより実行される典型的なプロセスを示しているフローチャートである。
【図3】図3は、図1に示されるシステムにより実行される典型的なプロセスを示しているフローチャートである。
【図4】[0011] 図4は、例示のデータと一緒に図2および3に示されたプロセスを視覚的に示す幾何学的な線図である。
【図5】図5は、例示のデータと一緒に図2および3に示されたプロセスを視覚的に示す幾何学的な線図である。
【発明を実施するための形態】
【0009】
[0012] 図1は、より正確な飛行計画/経路天気情報を提供するために航空機20に実装される例示のシステム30を図示する。システム30は、表示プロセッサ42、メモリ43、表示装置44およびユーザ・インタフェース装置48を含むレーダー・ディスプレイシステム38、並びに、気象レーダー・システム40を含む。航空機20はまた、空気データ・コンピュータ(ADC)のような他の航空機システム46を包含し、それは、気象レーダー・システム40およびレーダー・ディスプレイシステム38と信号通信をする。表示プロセッサ42は、レーダー・システム40、表示装置44、他の航空機システム46、ユーザ・インタフェース装置48およびメモリ43に電気的に連結する。レーダー・システム40は、レーダー・コントローラ50、送信機52、レシーバ54およびアンテナ56を含む。レーダー・コントローラ50は、ユーザ・インタフェース48から受けた他のパイロット入力および選択されたレーダー・モードに基づいてアンテナ56を介して信号の送受信を実行するために送信機52およびレシーバ54制御し、ACDから受信した航空機データ(すなわち、高度、速度、位置、飛行方向、ロール、ヨー、ピッチ、など)、飛行管理システム(Flight Management System、FMS)、Inertial Navigation System(INS)および/または全地球位置測定システム(GPS)(他の航空機システム46)から受けた。
【0010】
[0013] 目標60が、レシーバ54へ戻るように差し向けられたレーダー信号と関連するエネルギーを拡散させるためにある場合、レーダー・システム40は、送信機52からのレーダー信号を送信し、アンテナ56によって空間に送信されたレーダー信号を差し向け、レシーバ54を有するリターン信号を検出する。好ましくは、レーダー・システム40は、リターン信号をデジタル化し、デジタル化された信号を表示プロセッサ42に送信する。表示プロセッサ42は、メモリ43の多次元バッファのストレージに関して受信されるリターン信号を解釈する。表示プロセッサ42は次いで、ユーザ・インタフェース装置48から送られるいかなる制御信号に基づき、または、レーダー・システム40からの信号に基づいて表示装置44上のプレゼンテーションのための2次元(または3次元)イメージを生成する。
【0011】
[0014] クリスチャンソンによって2009年12月12日に出願された米国特許出願の出願番号第12/640,976号(それは本願明細書にリファレンスとして組み入れられる)は、垂直に統合した反射(VIR)計算を使用して怪しい天気と怪しくない天気との間を区別する方法を開示する。
【0012】
[0015] VIRデータは、3次元バッファのセルのカラムにストアされた反射値の合計、またはセルの柱のカラムの値の統合を含む。プロセッサ42は、反射値および高度の製品を垂直に統合し、各々ある力に上昇する。
【0013】
[0016] ある実施形態では、プロセッサ42は、表示リクエストに基づいて危険な天気と関連する0以上のグループまたは形状を最初に識別する。形状が存在する場合、プロセッサ42は、次いで、形状のセンターに基づいていくつかの領域または象限のうちの1つに、各々の識別された形状(関連する危険なセル)の各々のポイントを配置する。次いで、プロセッサ42は、各々の領域/象限において、中心から最も離れて間隔をおいて配置されたポイントだとわかる。各々の領域/象限の域外のポイントは、次いで、形状を囲む単純化された多角形に結果としてなっている線と関係がある。
【0014】
[0017] 図2は、多角形として危険な天気イメージを囲むかまたはより簡単に描写するプロセス80を例示する。第一に、ブロック84で、0以上の危険な天気エンティティの形状は、三次元バッファに格納されるレーダー・ソース・データから生成される。危険な天気の形状は、危険な天気として確認される(すなわち、VIRまたは他の算出に基づいて)三次元バッファにあるレーダー反射データと全て関係している複数のピクセルを含む。次いで、ブロック86で、各々の危険な天気形状の中央が、決定される。ブロック88で、各々の複数の領域または象限で、中心から最もはるかに間隔をおいて配置される危険な天気形状のピクセルは、決定される。最後に、ブロック90で、離れて最も遠いものであると決定されるピクセルが、形状の代わりにディスプレイに示される多角形をつくる隣接した領域/象限の他の最もはるかに離れたピクセルに接続される。
【0015】
[0018] 図3は、図2のブロック88で実行されるプロセスの実施形態を例示する。第一に、ブロック94で、空の最も離れたテーブルエントリは、各々の領域のためにつくられる。ブロック96で、ピクセル位置は、それが8つの領域のいずれにあるかについて決定するために調べられる。次にブロック98で、各々の領域において、ピクセルの形状は、どれが中心から最もはるかに間隔をおいて配置されるかについて決定するために、最も遠いテーブルの現在の最も遠いピクセルと比較される。最も遠いテーブルは、この時に更新される。ブロック100で、特定の領域と関係している前のルールに基づいて、領域に関する最も遠いタイも、分解される。形状の全てのピクセルが分析されるまで、ブロック102で、上のステップは繰り返される。
【0016】
[0019] 本発明の効果は、それが非常に急速で、処理時間の一貫した量を必要とするということである。形状は、二次元のアレイに効果的に格納される。ある実施形態では、次いで2Dバッファに処理される一組ソース(例えば、乱気流データまたはVIRデータ)から、形状に関するデータは、集められる。したがって、あらゆるポイントは、形状のいずれかの一部でもある。質量中心は、オブジェクトのあらゆるポイントのXおよびYを加えることにより、および、オブジェクトのポイントの数によって分割することにより、単に判断されることができる。
【0017】
[0020] 次のステップでは、センターポイントに対する比較は、ポイントが8つの象限の中のいずれにあるかについて判断するのに用いられる。どんな数の象限を用いることができるけれども、8は単純性および速度のために選ばれた。単純な最小/最大比較は、特定の象限に関して前に選択された遠くのポイントに対してされる。
【0018】
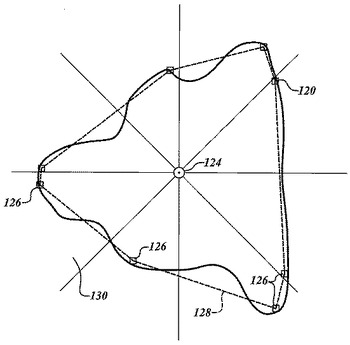
[0021] ある実施形態では、各々の領域の2つの最も遠いポイントは、ちょうど一つのポイントの代わりに周囲の多角形の一部として選ばれる。
[0022] 図4は、危険な天気形状120を示す。図4に示される画像は、レーダー表示装置上のユーザに、表示のために示されないのが好ましい。第一に、形状120の中央124が、決定される。それから、領域の境界が、識別される。各々の領域において、中心124から離れた形状120の最も遠いポイント126が、決定される。多角形128は、隣接した領域の一番遠いポイント126を接続することによって、つくられる。
【0019】
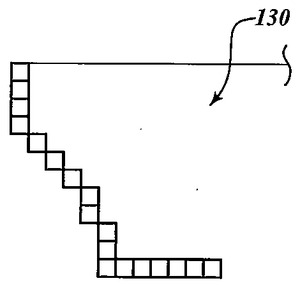
[0023] 図5は、図4の領域130の引き延ばした図を示す。ボックスは、形状120の外側の境界でピクセルを表す。領域のピクセルは、最も遠いテーブルに格納される最後のピクセルに対して分析される。未分析のピクセルが、最も遠いテーブルに格納される最後のピクセルよりセンター124からより離れている場合、新しく分析されたピクセルは、テーブルの前のピクセルを置換する。比較が、全ての比較終了後結果的にタイとなる場合、所定のタイ破壊ルールが適用される。例示のタイ破壊ルールは、領域130に関して次の通りである:
- より小さいx軸値を有するピクセルが勝つ、
- x軸値が同等の場合、より小さいy軸値を有するものが勝つ。
【0020】
[0024] 他の複数のタイ破壊ルール/アルゴリズムを使うことができる。排他的なプロパティまたは特権を主張する発明の実施形態は、以下のように定義される。
【特許請求の範囲】
【請求項1】
プロセッサ(42)により、
2次元形状を受け取り、
形状のセンターを見つけさせ、
共通のポイントとしてセンターを共有する複数の領域で形状の最も離れたポイントを見つけさせ、
最も離れたポイントに基づいて多角形を生成させ、
表示装置(44)に前記生成された多角形を表示するステップ、を有し、
前記形状が、3次元バッファに格納されたレーダー反射データから判断された危険な天気情報と関連し、前記表示装置が、航空機気象レーダー・ディスプレイであることを特徴とする方法。
【請求項2】
前記生成させることが、隣接する領域の最も離れたポイントの間を線で接続することからなり、前記複数の領域が、8つの領域からなり、複数の領域で形状の最も離れたポイントを見つけさせることが、複数の領域の各々で形状の少なくとも2つの最も離れたポイントで見つけさせることからなる、
ことを特徴とする請求項1に記載の方法。
【請求項3】
レーダー反射データを3次元バッファに格納するように構成されたメモリ(43)と、
表示装置(44)と、
前記メモリおよび前記表示装置をデータ接続するプロセッサ(42)と、
を有し、
前記プロセッサが、
前記メモリに格納されたデータの一部に基づいて2次元形状を受け取るように構成された第1のコンポーネントと、
形状のセンターを見つけるように構成された第2のコンポーネントと、
共通ポイントとしてセンターを共有する複数の領域で形状の最も離れたポイントを見つけるように構成された第3のコンポーネントと、
最も離れたポイントに基づいて多角形を生成するように構成された第4のコンポーネントと、
を有し、
前記表示装置が、前記生成された多角形を表示するように構成され、
前記形状が、前記3次元バッファに格納されたレーダー反射データから判断された危険な天気情報と関連し、前記表示装置が、航空機気象レーダー・ディスプレイからなり、
前記第4のコンポーネントが更に、前記多角形を生成するように隣接する領域の最も離れたポイントの間を線で接続するように構成され、
前記第3のコンポーネントが更に、複数の領域の各々の形状の少なくとも2つの最も離れたポイントを見つけるように構成される、
ことを特徴とするシステム(38)。
【請求項1】
プロセッサ(42)により、
2次元形状を受け取り、
形状のセンターを見つけさせ、
共通のポイントとしてセンターを共有する複数の領域で形状の最も離れたポイントを見つけさせ、
最も離れたポイントに基づいて多角形を生成させ、
表示装置(44)に前記生成された多角形を表示するステップ、を有し、
前記形状が、3次元バッファに格納されたレーダー反射データから判断された危険な天気情報と関連し、前記表示装置が、航空機気象レーダー・ディスプレイであることを特徴とする方法。
【請求項2】
前記生成させることが、隣接する領域の最も離れたポイントの間を線で接続することからなり、前記複数の領域が、8つの領域からなり、複数の領域で形状の最も離れたポイントを見つけさせることが、複数の領域の各々で形状の少なくとも2つの最も離れたポイントで見つけさせることからなる、
ことを特徴とする請求項1に記載の方法。
【請求項3】
レーダー反射データを3次元バッファに格納するように構成されたメモリ(43)と、
表示装置(44)と、
前記メモリおよび前記表示装置をデータ接続するプロセッサ(42)と、
を有し、
前記プロセッサが、
前記メモリに格納されたデータの一部に基づいて2次元形状を受け取るように構成された第1のコンポーネントと、
形状のセンターを見つけるように構成された第2のコンポーネントと、
共通ポイントとしてセンターを共有する複数の領域で形状の最も離れたポイントを見つけるように構成された第3のコンポーネントと、
最も離れたポイントに基づいて多角形を生成するように構成された第4のコンポーネントと、
を有し、
前記表示装置が、前記生成された多角形を表示するように構成され、
前記形状が、前記3次元バッファに格納されたレーダー反射データから判断された危険な天気情報と関連し、前記表示装置が、航空機気象レーダー・ディスプレイからなり、
前記第4のコンポーネントが更に、前記多角形を生成するように隣接する領域の最も離れたポイントの間を線で接続するように構成され、
前記第3のコンポーネントが更に、複数の領域の各々の形状の少なくとも2つの最も離れたポイントを見つけるように構成される、
ことを特徴とするシステム(38)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−198200(P2012−198200A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−32628(P2012−32628)
【出願日】平成24年2月17日(2012.2.17)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2012−32628(P2012−32628)
【出願日】平成24年2月17日(2012.2.17)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]