
デジタル地図の位置情報伝達方法とそれに使用する装置
【課題】デジタル地図上の位置を効率的、且つ、正確に伝達することができるデジタル地図の位置情報伝達方法を提供する。
【解決手段】送信側は、デジタル地図上のベクトル形状を特定する座標列情報を含む位置情報を伝達し、受信側は、前記座標列情報によりマップマッチングを実施してデジタル地図上の前記ベクトル形状を同定する位置情報伝達方法において、前記座標列情報に、当該座標列情報に含まれる座標点の方位情報を付加して伝達するようにしている。形状データに、方位情報を付加して伝達することにより、マッチング精度を高め、マッチングの所要時間を短縮することが可能になる。
【解決手段】送信側は、デジタル地図上のベクトル形状を特定する座標列情報を含む位置情報を伝達し、受信側は、前記座標列情報によりマップマッチングを実施してデジタル地図上の前記ベクトル形状を同定する位置情報伝達方法において、前記座標列情報に、当該座標列情報に含まれる座標点の方位情報を付加して伝達するようにしている。形状データに、方位情報を付加して伝達することにより、マッチング精度を高め、マッチングの所要時間を短縮することが可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、デジタル地図の位置情報を伝達する方法と、それに使用する装置に関し、特に、デジタル地図上の位置を効率的且つ的確に伝えることを可能にするものである。
【背景技術】
【0002】
近年、ナビゲーション車載器を搭載する車両が急激に増加している。ナビゲーション車載機は、デジタル地図データベースを保持し、交通情報センターなどから提供される渋滞情報や事故情報に基づいて、渋滞や事故位置を地図上に表示し、また、それらの情報を条件に加えて経路探索を実施する。
【0003】
デジタル地図のデータベースは、我が国では数社で作成されているが、基図及びデジタイズ技術の違いから、この地図データには誤差が含まれており、その誤差は各社のデジタル地図によって違っている。
交通情報などで、例えば事故位置を伝える場合、その位置の経度・緯度データを単独で提示すると、車載器では、保持しているデジタル地図データベースの種類により、異なる道路上の位置を事故位置として識別してしまう虞れがある。
【0004】
こうした情報伝達の不正確さを改善するため、従来は、道路網に存在する交差点などのノードにノード番号が、また、ノード間の道路を表すリンクにリンク番号が定義されており、各社のデジタル地図データベースでは、各交差点や道路がノード番号及びリンク番号と対応付けて記憶され、また、交通情報では、道路をリンク番号で特定し、その先頭から何メートル、と云う表現方法で道路上の地点が表示される。
【0005】
しかし、道路網に定義したノード番号やリンク番号は、道路の新設や変更に伴って新しい番号に付け替える必要があり、また、ノード番号やリンク番号が変更されると、各社のデジタル地図データも更新しなければならない。そのため、ノード番号やリンク番号を用いてデジタル地図の位置情報を伝達する方式は、そのメンテナンスに多大な社会的コストが掛かることになる。
【0006】
こうした点を改善するため、本発明の発明者等は、特願平11−214068号において、情報提供側が、道路位置を伝えるために、その道路位置を含む所定長の道路区間の道路形状を示す座標列から成る「道路形状データ」と、この道路形状データで表される道路区間内の道路位置を示す「相対位置データ」とを伝達し、これらの情報を受信した側では、道路形状データを用いてマップマッチングを行い、デジタル地図上の道路区間を特定し、相対位置データを用いてこの道路区間内の道路位置を特定する方式を提案し、また、特願平11−242166号において、上記「道路形状データ」の伝送データ量を削減しても、受信側でのマップマッチングを正確に実施できるように、道路種別、道路番号、道路区間内のノードの交差リンク数、交差リンク角度、交差点名などの「付加情報」を併せて伝送する方式を提案し、さらに、受信側での誤マッチングを招来しない範囲で「道路形状データ」の伝送データ量を間引く方式について提案している。
【0007】
この場合、受信側でのマップマッチングは、例えば次のように行われる。
図45に示すように、A〜B区間で渋滞が発生している道路の道路形状を表す
「道路形状データ」として、地点P0(x0,y0)、P1(x1,y1)、‥、Pk(xk,yk)の経度・緯度データが
(x0,y0)(x1,y1)‥(xk,yk)
のように伝えられると、受信側は、図44に示すように、自己のデジタル地図データベースから読み出した地図データを用いて、P0(x0,y0)地点を中心とする誤差の範囲に含まれる道路を候補として選定し、その中から、伝送された「付加情報」を用いて候補を絞り込む。候補が1つに絞り込めたときは、その道路の(x0,y0)及び(xk,yk)に最も近い位置を求め、その区間を「道路形状データ」で表された道路区間とする。
【0008】
候補が1つに絞り込めず、道路Q、Rが候補として残った場合は、P0(x0,y0)に最も近い各候補道路上の位置Q0、R0を求め、P0〜Q0、P0〜R0間の距離を算出する。この操作をP1(x1,y1)、‥、Pk(xk,yk)の各点について実行し、各点P0、P1、‥、Pkからの距離の二乗平均の加算値が最小となる道路区間を求め、これを「道路形状データ」が表す道路区間とする手法等により、道路区間を特定する。
A〜Bの渋滞区間は、「道路形状データ」から求めた道路区間の開始位置を起点に、伝送された「相対位置データ」に基づいて特定する。
【発明の概要】
【発明が解決しようとする課題】
【0009】
交通情報などで、デジタル地図上の位置情報を伝達する場合は、相手方に正しい位置が短時間で認識できるようにデータを伝送する必要がある。
また、デジタル地図上の位置情報を伝達する場面としては、山岳での遭難現場や河川事故などの情報を伝える場合も想定されるため、道路以外の地図形状や道路上以外の地点の位置情報を伝達することも必要になる。
【0010】
本発明は、こうした課題に応えるものであり、デジタル地図上の地図形状を特定する「形状データ」と、この「形状データ」で特定した地図形状の中の相対位置を特定する「相対位置データ」とを用いてデジタル地図の位置情報を伝達する方法をさらに改良し、デジタル地図上の位置を効率的に、且つ、正確に伝達することができ、また、道路形状や道路上の地点以外の位置情報についても伝達することができるデジタル地図の位置情報伝達方法を提供し、また、それに使用する装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
本発明は、位置情報送信装置及び位置情報受信装置を含む位置情報伝達システムであって、前記位置情報提供装置及び前記位置情報受信装置はそれぞれデジタル地図を備え、前記位置情報送信装置は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備え、前記位置情報受信装置は、前記道路形状データを受信する手段と、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段と、を備えたことを特徴とする。
【0012】
本発明は、位置情報送信装置及び位置情報受信装置がそれぞれデジタル地図を備え、前記それぞれのデジタル地図間におけるデジタル地図上の位置情報伝達方法であって、前記位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行し、前記位置情報受信装置は、前記道路形状データを受信するステップと、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、を実行する。
【0013】
本発明は、デジタル地図を備えた位置情報受信装置に対し、自己のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信装置であって、当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備えたことを特徴とする。
【0014】
本発明は、デジタル地図を備えた位置情報受信装置に対し、位置情報送信装置のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信方法であって、当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行する。
【0015】
本発明は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信する手段と、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段とを備えたことを特徴とする位置情報受信装置である。
【0016】
本発明は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信するステップと、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、を備えたことを特徴とする位置情報受信方法である。
【0017】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、前記位置情報送信装置は、第1のデジタル地図の第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、前記生成した位置情報を位置情報受信装置に送信する送信手段と、を備え、前記位置情報受信装置は、前記生成された位置情報を受信する受信手段と、前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定する手段と、を備えたことを特徴とする。
【0018】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、前記位置情報送信装置は、前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、前記位置情報受信装置は、前記生成された位置情報を受信するステップと、前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定するステップと、を実行する。
【0019】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備えることを特徴とする。
【0020】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を備えることを特徴とする。
【0021】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、前記位置情報送信装置は、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備え、前記位置情報受信装置は、前記生成された位置情報を受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、を含むことを特徴とする。
【0022】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、前記位置情報送信装置は、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、前記位置情報受信装置は、前記生成された位置情報を受信する受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、を実行する。
【0023】
本発明は、第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、当該位置情報送信装置は、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備える。
【0024】
本発明は、第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を備える。
【0025】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける前記位置情報受信装置であって、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、を含むことを特徴とする。
【0026】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける位置情報受信方法であって、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、を含む。
【0027】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムであって、前記位置情報送信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段と、を含み、前記位置情報受信装置は、前記生成された位置情報を受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、を含む。
【0028】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報伝達方法であって、前記位置情報送信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを実行し、前記位置情報受信装置は、前記生成された位置情報を受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、を実行する。
【0029】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信装置であって、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段を含む。
【0030】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信方法であって、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを含む。
【0031】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報受信装置であって、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、を含む。
【0032】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報受信方法であって、前記位置情報受信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、を実行する。
【発明の効果】
【0033】
以上の説明から明らかなように、本発明のデジタル地図の位置情報伝達方法では、デジタル地図上の位置を効率的、且つ、正確に伝達することができる。
【0034】
形状データに、方位情報や高さ情報、方向識別フラグによる一方通行情報などを付加して伝達する方法では、マッチング精度を高め、マッチングの所要時間を短縮することが可能になる。
【0035】
また、形状データ列を関数で近似したり、二条線の形状データをオフセット距離で表示する伝達方法では、データ量を減らし、データ伝送効率を高めることができる。
【0036】
また、道路区間内の交差点などに基準点を設定して事象位置までの相対距離を表示したり、ノード番号で事象位置を規定する伝送方法では、受信側での事象位置の特定精度を高めることができる。
【0037】
また、方向識別フラグを用いることにより、事象の影響が及ぶ車両進行方向を特定することができる。
【0038】
また、圧縮されている形状データ列から等間隔のデータを復元する方法及び装置では、受信側でのマッチング効率を高めることができる。
【0039】
また、本発明の伝達方法では、旅行時間を伝達したり、また、地図データの著作権を損なわない形でのデータを伝達したりすることも可能である。
【0040】
また、本発明は、道路以外のベクトルデータの伝達にも応用することができ、また、デジタル地図上の道路外の位置を伝達することもできる。
【図面の簡単な説明】
【0041】
【図1】第1の実施形態の形状データを説明する図
【図2】第1の実施形態の送信側での形状データの生成手順を示すフロー図
【図3】第1の実施形態でのノード列情報を示す図
【図4】第1の実施形態での受信側のマップマッチングを説明する図
【図5】第1の実施形態での受信側のマップマッチング手順を示すフロー図
【図6】第2の実施形態の形状データを説明する図
【図7】第2の実施形態でのノード列情報を示す図
【図8】第2の実施形態での別の表現方法を取るノード列情報を示す図
【図9】第3の実施形態におけるデータ削減を示す図
【図10】第3の実施形態でのノード列情報を示す図
【図11】二条線の説明図
【図12】第4の実施形態での形状データを説明する図
【図13】第4の実施形態でのオフセットの方向を説明する図
【図14】第4の実施形態でのマスタ側のノード列情報を示す図
【図15】第4の実施形態でのマスタを参照する側のノード列情報を示す図
【図16】第4の実施形態での別の方式による形状データを説明する図
【図17】第5の実施形態での形状データを説明する図
【図18】第5の実施形態での形状データの生成手順を示すフロー図
【図19】第5の実施形態での遷移値の決定手順を示すフロー図
【図20】第6の実施形態での基準点を説明する図
【図21】第6の実施形態でのノード列情報、道路付加情報、事象情報を示す図
【図22】第7の実施形態でのノード列情報及び事象詳細情報を示す図
【図23】第7の実施形態でのノード列情報及び事象情報を示す図
【図24】第8の実施形態での事象発生状況を説明する図
【図25】第8の実施形態でのノード列情報、道路付加情報、事象情報を示す図
【図26】第8の実施形態での一方通行状況を説明する図
【図27】第8の実施形態で一方通行を表示するノード列情報を示す図
【図28】第8の実施形態でのマップマッチング手順を示すフロー図
【図29】第8の実施形態での二条線の事象を表す事象情報を示す図
【図30】第9の実施形態での旅行時間を説明する図
【図31】第9の実施形態でのノード列情報、道路付加情報、所要時間情報を示す図
【図32】第10の実施形態における位置情報送受信装置の構成を示すブロック図
【図33】第10の実施形態での形状データの圧縮、復号を説明する図
【図34】デジタル地図での施設形状ベクトルを示す図
【図35】デジタル地図での県境形状、等高線、湖沼形状を表すベクトルを示す図
【図36】第11の実施形態での家屋形状のノード列情報を示す図
【図37】第11の実施形態での水系形状のノード列情報を示す図
【図38】第11の実施形態での行政界形状のノード列情報を示す図
【図39】第11の実施形態での等高線形状のノード列情報を示す図
【図40】第12の実施形態での道路外位置表現方法を説明する図
【図41】第12の実施形態での位置再現手順を示すフロー図
【図42】第12の実施形態での別の道路外位置表現方法を説明する図
【図43】第12の実施形態での別の位置再現手順を示すフロー図
【図44】マップマッチングの一例を説明する図
【図45】道路形状データ及び相対位置情報を説明する図
【図46】切片方位を説明する図
【図47】第10の実施形態において直線近似された区間でのデータ復元方法を説明する図
【図48】第10の実施形態において関数近似された区間でのデータ復元方法を説明する図
【図49】ノード座標を前ノードとの距離及び偏角で表す方法を説明する図
【図50】ノード座標を前ノードとの距離及び偏角で表したノード列情報を示す図
【図51】ノード座標を前ノードとの距離及び偏角で表した形状データを模式的に示す図
【図52】ノード座標を前ノードとの距離及び偏角で表したときのマップマチング処理を模式的に示す図
【図53】ノード座標を前ノードとの距離及び偏角で表したときのマップマチング処理において、次の候補点の求め方を示す図
【発明を実施するための形態】
【0042】
(第1の実施形態)
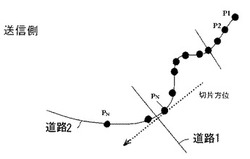
第1の実施形態では、形状データに切片方位情報を加えて伝達し、受信側での道路区間を特定するマップマッチング精度を高めるための位置情報伝達方法について説明する。
【0043】
図1に示す道路2のP1からPNまでの道路形状を伝達するために、黒丸で示す各点の経度データ及び緯度データを形状データとして伝達する場合を例に説明する。ここで黒丸は、デジタル地図データベースに含まれる道路上のノード及びノードの補間点を表している。ノードは、交差点、トンネルの入口・出口、橋の入口・出口、行政区画の境界などに対応して設定されており、ノード番号が付されている。補間点は、ノード間の道路形状を再現するために設定されている点である。ここでは、特に断らない限り、ノード及び補間点を合わせてノードと呼ぶことにする。
【0044】
各ノードの経度データ及び緯度データは、送信側及び受信側のデジタル地図データベースに格納されているが、前述するように、そのデータには、それぞれ誤差が含まれている。
送信側は、道路形状を示す形状データに、P1、P2、‥、PNの経度・緯度データを含めて伝送するが、データ量を削減するため、P1の経度・緯度データは絶対座標値(経度、緯度)で表示し、P2、‥、PNの経度・緯度データはP1の経度・緯度データとの差分を示す相対座標値、または、1つ前のノードの経度・緯度データとの差分を示す相対座標値で表示する。
【0045】
形状データに含める切片方位情報は、図1の点線矢印で示すように、各ノード位置における切片方位、即ち、ノードpxにおいて道路曲線に接する接線の方位の情報である。
このノード位置での切片方位は、図46に示すように、真北の絶対方位を0度とし、時計回りに0度〜360度の範囲で表示する。ノードpxの切片方位は、ノードpxの上流側に位置する隣接ノードをpx-1、ノードpxの下流側に位置する隣接ノードをpx+1とするとき、ノードpx-1とノードpxとを結ぶ直線の方位θx-1と、ノードpxとノードpx+1とを結ぶ直線の方位θxとを平均し、
(θx-1+θx)/2
により求めることができる。
【0046】
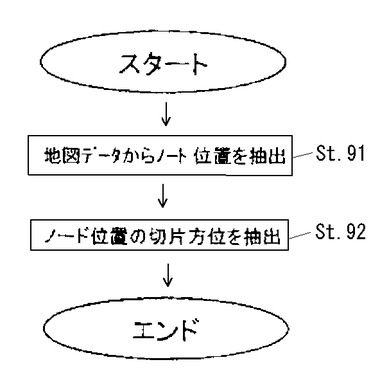
図2は、送信側で各ノードの切片方位を求める手順を示しており、
ステップ91:地図データから各ノード位置を抽出し、
ステップ92:各ノード位置の切片方位を抽出する。
【0047】
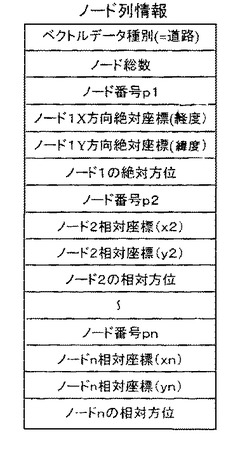
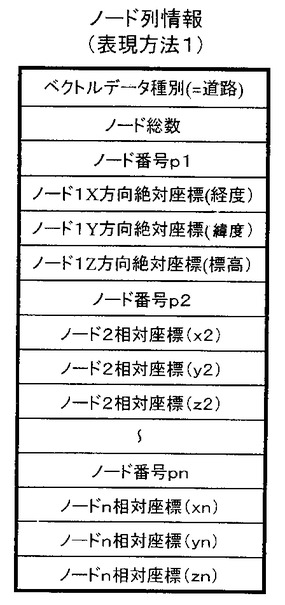
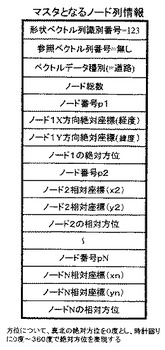
こうして抽出された各ノードの切片方位は、図3に示すように、各ノードの経度・緯度データとともに、形状データを表すノード列情報として纏められる。このノード列情報には、ノード列が表すベクトルデータの種別(この場合は「道路」)と、ノード総数(N個)と、ノード番号P1からの各ノードに関する経度・緯度データ及び切片方位データとが並ぶ。ノード番号P1の経度・緯度データ及び切片方位データは絶対座標及び絶対方位で表示されるが、ノード番号P2からノード番号PNまでの経度・緯度データ及び切片方位データは、データ量を減らすため、相対座標及び相対方位で表示される。
このノード列情報は、ノード列情報によって表された道路区間内の事象位置を表す相対位置データとともに伝送フォーマットに変換されて伝送される。
【0048】
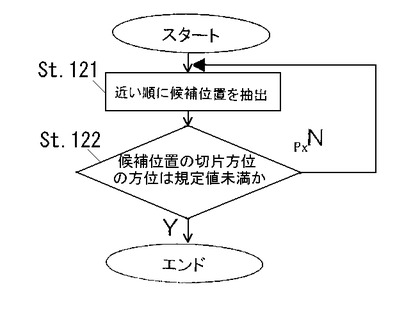
ノード列情報及び相対位置データを受信した受信側は、マップマッチングを実施してノード列情報で表示された道路区間を特定する。図5は、このマップマッチングでの手順を示している。
ステップ121:ノード番号PXの経度・緯度データに近い道路上の位置を、近い順にマッチング候補として抽出し、
ステップ122:その候補位置の切片方位とPXの切片方位との差分を求める。その差分が規定値より小さければマッチング候補とし、図44で説明したマップマッチングの対象とする。
【0049】
また、差分が規定値より大きい場合には、それをマッチング候補から除外し、ステップ121に戻って、次ぎに近いものをマッチング候補として抽出し、ステップ122の手順を実行する。
【0050】
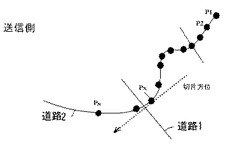
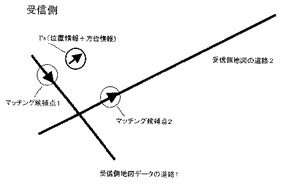
図1において、道路2上の地点PXは、最も近い道路である道路1に誤マッチングしやすいが、図4に示すように、受信側では、マッチングに際して、地点PXに最も近い道路1上のマッチング候補点1と地点PXとの切片方位を比較することにより、マッチング候補点1を候補から除外することができ、地点PXに次に近い道路2上のマッチング候補点2を候補として残すことができる。
【0051】
このように、この実施形態の位置情報伝達方法では、位置情報に切片方位情報を含めることにより、受信側でのマッチング精度を高め、短時間での候補の絞り込みを可能にする。そのため、受信側では、伝達されたデジタル地図上の位置を正確且つ迅速に認識することができる。
【0052】
なお、この実施形態では、道路形状を示す形状データに、道路のノード及び補間点の座標データを含める場合について説明したが、道路形状上で一定間隔ごとに座標点をリサンプルし、道路形状を示す形状データには、前記座標点の座標データを含めるようにしてもよい。
【0053】
(第2の実施形態)
第2の実施形態では、形状データに高さのデータを加えて伝達する位置情報伝達方法について説明する。
【0054】
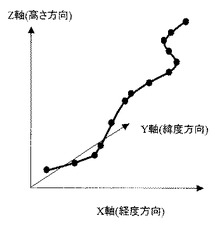
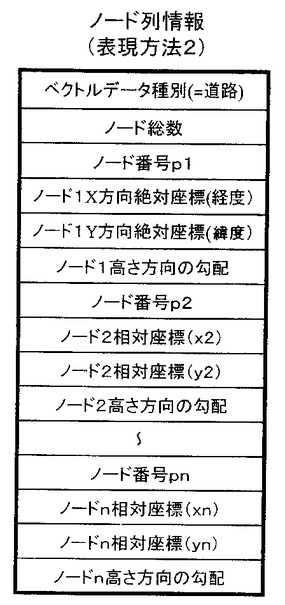
図6は、デジタル地図データが、経度、緯度及び高さの3次元で表現されている場合の道路を表すベクトルデータ列を模式的に示している。
この場合、送信側は、形状データのノード列情報に、図7に示すように、各ノードのX方向座標(経度)、Y方向座標(緯度)及びZ方向座標(標高)を含めて受信側に伝達する。
【0055】
受信側では、第1の実施形態の切片方位情報と同様に、マッチングに際して、X−Y平面上の距離に基づいて選択したマッチング候補点のZ方向座標を参照することにより、候補点を絞り込むことができ、伝達されたデジタル地図上の位置を正確且つ迅速に認識することができる。
【0056】
なお、各ノードのZ方向座標は、標高で表したが、地表面からの高さで表示しても良い。このように、地表面からの高さのデータを形状データに含めることにより、高架道路と、その下を通る一般道路とを区別することが可能になる。
また、図8に示すように、各ノードのZ方向座標は、1つ手前のノードとの勾配で表示しても良い。
【0057】
(第3の実施形態)
第3の実施形態では、形状データを関数で近似して、伝達するデータ量を削減する位置情報伝達方法について説明する。
【0058】
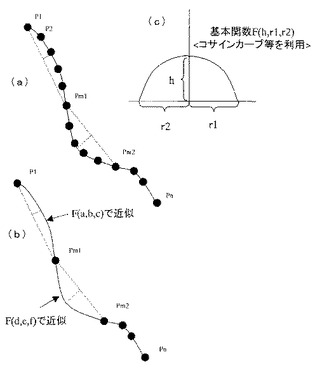
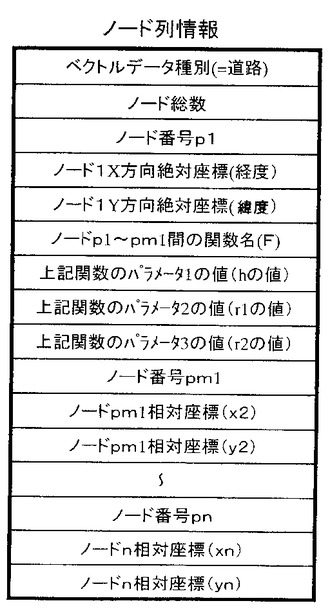
図9(a)に示すP1からPnまでのベクトルデータ列の内、P1からPm1まで、及び、Pm1からPm2までの形状を、図9(c)に示すコサインカーブ等の基本関数F(h,r1,r2)で近似する。h,r1,r2は、この関数のパラメータである。
【0059】
この近似を行うことにより、図9(b)に示すように、P1からPm2までは、P1、Pm1及びPm2の座標データと、F(a,b,c)で示すP1〜Pm1間を近似した関数及びそのパラメータと、F(d,e,f)で示すPm1〜Pm2間を近似した関数及びそのパラメータとで表すことができ、データ量を削減できる。
図10は、この場合のノード列情報を示している。
【0060】
受信側では、この形状データを受信すると、P1とPm2との間は、P1、Pm1及びPm2の座標データとパラメータとからF(a,b,c)及びF(d,e,f)で表示された形状を求め、その形状の上に任意の間隔で地点を設定してマップマッチングを実施する。
この場合、F(a,b,c)及びF(d,e,f)で表される形状は、図9(a)のP1からPm1及びPm1からPm2までの形状と正確に一致しなくても、受信側で誤マッチングを生じない程度に近似していれば良い。
【0061】
この実施形態の位置情報伝達方法では、伝達するデータ量を大幅に削減することができ、データ伝送の効率化を図ることができる。
【0062】
(第4の実施形態)
第4の実施形態では、平行する道路の道路形状データを少ないデータ量で伝達する位置情報伝達方法について説明する。
【0063】
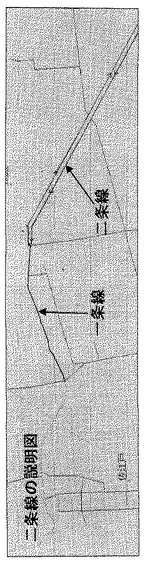
高速道路や有料道路は、図11に示すように、多くのデジタル地図において上下線分離道路で表現され、二条線と呼ばれている。この二条線の場合には、図12に示すように、一方の道路(道路2)の道路形状データは、他方の道路(道路1)の道路形状データを利用して、データ量を圧縮することができる。
【0064】
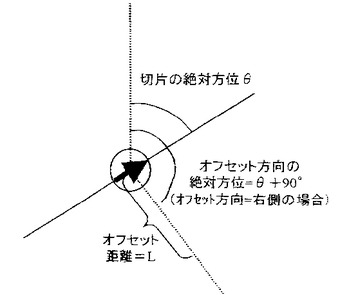
この場合、道路2のノード地点P1’、P2’、‥、Pn’は、道路1におけるノード地点P1、P2、‥、Pnを、道路1の右側(または左側)に、一定のオフセット距離(L)だけ移動した地点として近似することができる。オフセットする方向は、図13に示すように、道路1の各ノード地点P1、P2、‥、Pnの切片方向と直交する方向である。
【0065】
ノード列情報には、図14に示すように、先頭に、形状データの識別番号である形状ベクトル列識別番号と、参照すべき形状データを表す参照ベクトル列番号とを記述する。マスタとなる道路1のノード列情報では、参照ベクトル列番号は「無し」となり、各ノードについて、第1の実施形態と同様(図3)、経度・緯度データと切片方位データとを記述する。
【0066】
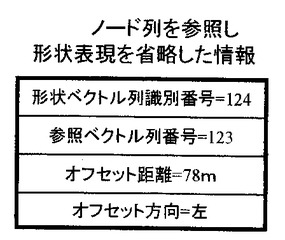
一方、道路1の形状データを参照する道路2のノード列情報は、図15に示すように、道路2の形状ベクトル列識別番号と、参照先の道路1の形状データを表す参照ベクトル列番号と、オフセット距離と、オフセット方向(マスタとなるノード列の右か左か)とを記述する。
【0067】
このように、平行する道路の場合には、一方の道路の道路形状データを利用して他方の形状データを表すことにより、伝送すべきデータ量を大幅に削減することができる。
【0068】
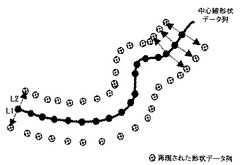
なお、この方式では、二条線の一方の実在する道路形状から、一定距離オフセットして、他方の道路を写像して再現しているが、この場合には、曲率の大きい急なカーブ部分で誤差が大きくなると云うウイークポイントを持つ。写像により再現される位置の誤差をできるだけ小さくするには、図16に示すように、二条線の中心線を求め、この実在しない「仮想の中心線形状ベクトルデータ列」をマスタとして送信し、上り路線及び下り路線の形状データは、両方とも、マスタを参照し、オフセット距離及びオフセット方向だけで規定するようにしても良い。
また、ここでは二条線について説明したが、多数の道路が並走する格子状道路を対象として、この実施形態の方式を適用することも可能である。
【0069】
(第5の実施形態)
第5の実施形態では、デジタル地図の著作権を損なうことが無いように、形状データを崩して伝達する位置情報伝達方法について説明する。
【0070】
デジタル地図は、その地図の制作者が独自の工夫を凝らして地図形状を設定しており、地図形状に対して制作者が著作権を有している。そのため、地図形状を形状データでそのまま伝達した場合には、デジタル地図の著作権を損なう虞れが発生する。この実施形態の位置情報伝達方法では、そうした懸念を除くため、元の地図形状を、受信側で誤マッチングが発生しない程度に、多少変形して伝達する。
【0071】
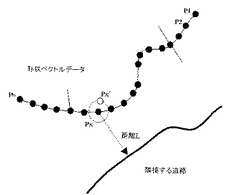
図17は、この場合の形状データの変形を模式的に示している。地図データの持つ本来の位置をPxとするとき、この位置をPx’の位置に変形する。このとき、PxからPx’までの距離(遷移値B)は、地点Pxから隣接する道路までの距離Lに基づいて設定し、また、PxからPx’への方位(遷移方位θ)は乱数で決定する。
【0072】
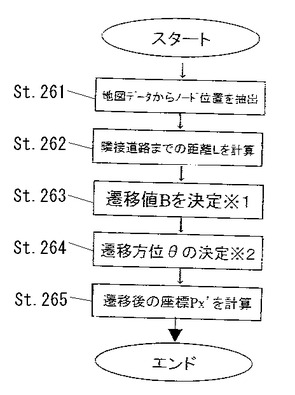
図18は、Px’を算出する手順を示している。
ステップ261:地図データからノード位置Pxを抽出して、
ステップ262:隣接道路までの距離Lを計算し、
ステップ263:遷移値Bを決定する。
【0073】
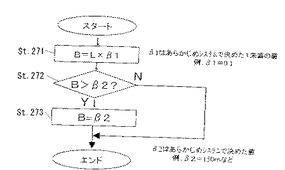
この遷移値Bの決定は、図19に示す手順により、
ステップ271:B=L×β1によりBを求める。ここで、β1は、あらかじめシステムで決めた1未満の値(例、β1=0.1)である。
ステップ272:ステップ271で求めたBをβ2と比較する。β2は、あらかじめシステムで決めた距離(例、β2=150m)である。B>β2であるときは、
ステップ273:B=β2と決定する。
また、ステップ272において、B≦β2であるときは、ステップ271で求めた値をBと決定する。
【0074】
こうして遷移値Bを決定すると、
ステップ264:遷移方位θを次式によって決定する。
θ=R×360 (度)
ここで、Rは乱数発生関数であり、0〜1の一様乱数である。なお、θは、真北の絶対方位を0度として、時計回りに0度〜360度の絶対方位を表現している。
ステップ265:決定した遷移値B及び遷移方位θを用いて、遷移後の座標Px’を計算する。
【0075】
こうした手順により、地図データを、受信側で誤マッチングが発生しない程度に、変形することができる。
【0076】
なお、地図データの変形方法としては、この他に、Pxの座標値に対して緯度方向に乱数Cを加算し、経度方向に乱数Dを加算して遷移後の座標Px’を求める方法、あるいは、本来の位置からの遷移値をσ=Aの正規分布となるように乱数で決定する方法などを用いることもできる。
【0077】
(第6の実施形態)
第6の実施形態では、形状データで特定した道路区間の中の相対位置を、この道路区間の中に適宜定義した基準点を用いて特定し、この情報を伝達する位置情報伝達方法について説明する。
【0078】
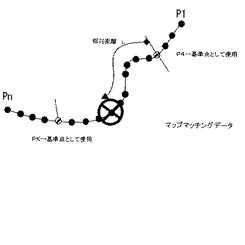
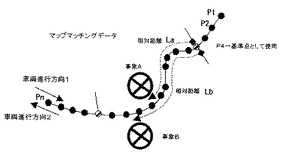
図20に示すように、形状データによりP1からPnまでのノード列を伝達し、この中の事故位置を伝える場合に、この実施形態の方法では、ノード列の途中の交差点のノードP4を基準点に取り、P4からの相対距離によって事故位置を表示する。
また、この道路区間に発生している渋滞を、T字路のノードPxを基準点に取り、Pxからの相対距離によって表示する。
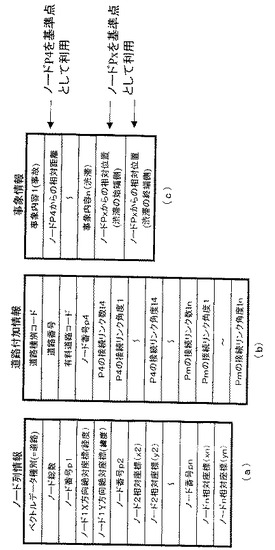
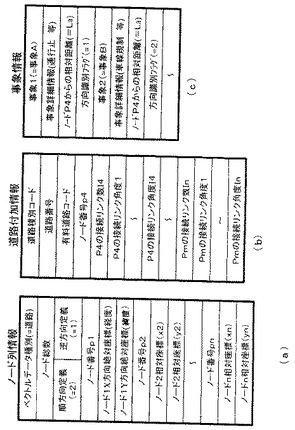
このように、道路区間内に定義した基準点を用いて表示する相対位置情報は、図21に示すデータによって受信側に伝達される。
【0079】
図21(a)は、道路区間を特定するノード列情報である。図21(b)は、特願平11−242166号で提案している道路付加情報であり、対象とする道路の道路種別コード、道路番号、有料道路コードとともに、この道路区間に含まれる交差点ノードに関して、ノード列情報にリンクするノード番号、その交差点ノードの接続リンク数、各接続リンクの接続リンク角度が、それぞれの交差点ノードごとに表示されている。
【0080】
図21(c)は、道路区間内の相対位置と、その位置で発生している事象の事象内容とを表示する事象情報であり、相対位置は、基準点を明示し、そこからの相対距離で表示される。
【0081】
このように、送信側が、道路区間内の交差点などの識別し易いノードを基準点として定義することにより、受信側では、事象発生位置を的確に把握することが可能になる。
【0082】
(第7の実施形態)
第7の実施形態では、各ノード情報と当該ノードでの発生事象とを直接関連付けて表示し、伝達する位置情報伝達方法について説明する。
【0083】
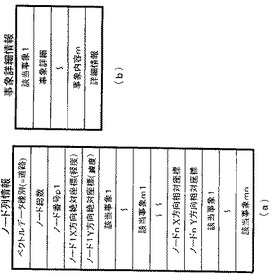
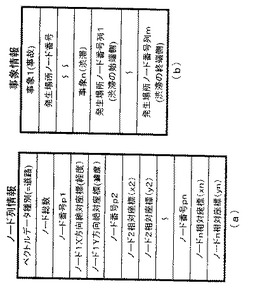
この方法では、図22(a)に示すように、ノード列情報の中で、各ノード番号の座標データに続けて、当該ノードで発生している該当事象を該当事象コードで記述し、図22(b)に示すように、各該当事象コードで表した事象内容を事象詳細情報として記述する。
あるいは、図23(a)に示すように、ノード列情報には、ノード番号と座標データとだけを記述し、図23(b)に示すように、事象情報として、事象内容と、その事象が発生しているノード番号とを記述する。
この方法では、受信側において、事象発生位置を高精度に再現することができる。
【0084】
(第8の実施形態)
第8の実施形態では、道路上の位置情報を、車両の進行方向の情報を含めて伝達する位置情報伝達方法について説明する。
例えば、道路上の事故が上り車線の走行にだけ影響し、下り車線には影響しない場合がある。こうしたとき、交通情報では、事故発生位置と、事故の影響を受ける車線の情報とを伝達する必要がある。
【0085】
図24は、道路上で、車両進行方向1の方向に走行している車両が影響を受ける事象A(通行止)と、車両進行方向2の方向に走行している車両が影響を受ける事象B(車線規制)とが発生している状態を模式的に示している。
【0086】
このとき、道路上の位置情報は、図25に示すデータによって受信側に伝達される。
図25(a)は、道路区間を特定するノード列情報である。このノード列情報では、ノード列の並び順に対する順方向を2、ノード列の並び順に対する逆方向を1とする方向定義が規定されている。図25(b)は、第6の実施形態(図21)と同様の道路付加情報である。
【0087】
図25(c)は、事象情報であり、各事象について、事象内容、及び基準点からの相対距離とともに、その事象が影響を与えている車両進行方向を、方向定義を示す方向識別フラグにより表示している。即ち、事象Aは、車両進行方向1の方向に走行する車両が影響を受けるため、方向識別フラグには、逆方向を定義する1が表示され、事象Bは、車両進行方向2の方向に走行する車両が影響を受けるため、方向識別フラグには、順方向を定義する2が表示される。
【0088】
このデータを受信した受信側では、ノード列情報で表示されたノードP1、P2、‥、Pnの一方向の配列に対するマップマッチングで道路区間を特定し、事象情報に記述された相対情報と方向識別フラグの情報とに基づいて、道路区間内の事象発生位置を、車両進行方向を含めて特定することができる。そのため、一方向の形状データで両方向の事象を表現することが可能になり、データ量の圧縮が可能となる。
【0089】
また、この方向識別フラグは、第4の実施形態で説明した二条線の一方で発生した事象を記述する場合にも使用することができ、図29に示すように、形状ベクトル列識別番号123の道路(図14)を写像して再現した、形状ベクトル列識別番号124の道路(図15)で発生した事象であることを、方向識別フラグ(=1)により表示することができる。なお、この道路での事象情報は、ノード番号として写像後のノード番号(Pn’)を使用して表示する。
【0090】
また、方向識別フラグは、形状データで特定する道路区間の一方通行を表示する場合にも使用することができ、図26に示すように、ノード列の並び順に対して、順方向を1、逆方向を2と方向定義した場合、形状データで特定される道路区間がPn→P1方向の一方通行であるとき、図27に示すように、ノード列情報に一方通行方向を2と指定する方向識別フラグを記述して、一方通行情報を表示することができる。なお、一方通行で無い場合は、0(=一方通行無し)で表示する。
【0091】
このノード列情報を受信した受信側では、マップマッチングに際して、図28に示すように、
ステップ341:ノード列情報を受信し、
ステップ342:マップマッチングを実施して、マッチング候補の道路地点を抽出する。
ステップ343:その候補地点の地図データ上での一方通行の指定と、ノード列情報の一方通行方向情報とを比較する。それらが一致するときは、そのマッチング候補を残し、不一致であるときは、マッチング候補から除外して、ステップ342に戻り、次ぎのマッチング候補を抽出する。
【0092】
このように、方向識別フラグを使用することにより、一方通行の情報や、発生した事象が影響を及ぼす車両進行方向の情報などを、少ないデータ量で伝達することができる。
【0093】
(第9の実施形態)
第9の実施形態では、交通情報として、2地点間の旅行時間を伝える位置情報伝達方法について説明する。
【0094】
この方法では、図30に示すように、2つの基準点(P4、Px)を設定し、この基準点間の旅行時間を図31に示すデータで伝達する。
図31(a)は、この2つの基準点を含む道路区間を特定するためのノード列情報である。図31(b)は、第6の実施形態で説明した図21(b)と同様の道路付加情報である。図31(c)は、旅行時間を表示する所要時間情報であり、始端側ノード番号(P4)、終端側ノード番号(Px)及びその間の旅行時間が記述される。
【0095】
この情報を受信した受信側では、ノード列情報及び道路付加情報を用いて、マップマッチングで道路区間を特定し、所要時間情報から、基準点間の旅行時間を認識することができる。
【0096】
(第10の実施形態)
第10の実施形態では、データ圧縮された位置情報を受信した受信側で、マップマッチングがし易いベクトルデータ列を再生する方法について説明する。
【0097】
図32は、位置情報を受信して再生し、また、事象発生を知らせる位置情報を生成して送信する位置情報送受信装置10を示している。
この装置10は、他の装置20の位置情報送信部21から送られた位置情報を受信する位置情報受信部11と、この位置情報に含まれる形状データをマップマッチングがし易いベクトルデータ列に変換するノード列復元部12と、デジタル地図データを蓄積するデジタル地図データベース14と、マップマッチングを実施して位置情報で表された道路区間を特定するマップマッチング部13と、位置情報で表された道路区間と事象位置とを表示するデジタル地図表示部15と、発生した事象情報を入力する事象入力部16と、事象発生位置を伝達するための位置情報を生成する位置情報変換部17と、生成された位置情報を他の装置20の位置情報受信部22に送信する位置情報送信部18とを備えている。
【0098】
この装置10では、位置情報受信部11が位置情報を受信し、ノード列復号部12が、そこに含まれる関数近似や間引きによりデータ圧縮された形状データを等間隔の形状ベクトルデータ列に変換する。図33(a)は、圧縮前の形状ベクトルデータ列を示し、図33(b)は、間引き及び関数近似により圧縮されたデータを示している。ノード列復号部12は、この図33(b)のデータから、図33(c)に示すように、等間隔の形状ベクトルデータ列を復元する。
【0099】
マップマッチング部13は、デジタル地図データベース14に蓄積された地図データから、復元された形状ベクトルデータ列にマッチングする道路区間を検出し、また、この道路区間の事象発生位置を位置情報から特定して、デジタル地図表示部15にそれらを表示する。
また、事象情報入力部16から事象情報が入力されると、位置情報変換部17は、事象発生位置を含む道路区間と、この道路区間内の事象発生位置とを指定する位置情報を生成し、この位置情報が位置情報送信部18から送信される。
【0100】
このノード列復元部12の具体的な動作について説明する。
送信側では、地図データから図33(a)に示す形状ベクトルデータ列を取得すると、その一部の形状ベクトルデータ列を関数Fで近似し、また、直線的な部分はデータを間引き、こうしてデータ量を圧縮したデータを送信する。
【0101】
なお、関数Fで近似する方法については第3の実施形態で説明した。また、データを間引く方法については、特願平11−242166号に詳しく説明している。要は、道路区間に含まれるノードの中で、マップマッチングへの貢献度が低いノードを間引くのであり、そのため、隣接するノードから当該ノードへの方位に対して、当該ノードから次のノードへの方位の変化が所定角度以下であり、且つ、前記隣接するノードから当該ノードまでの距離が所定距離未満である場合に、当該ノードは間引かれる。
【0102】
こうした圧縮されたデータを受けて、ノード列復元部12は、次のようにして、等間隔のデータを復元する。ここでは、各間隔が、一定距離A(メートル)から±b(メートル)以上ずれないように復元している。
【0103】
データが間引かれている区間では、Pn-1(Xn-1,Yn-1)とPn(Xn,Yn)との間は直線と見なし、Aメートル間隔でポイントを生成する。この模様を図47に示している。
ここで、Pn-1→Pnベクトルの真北(Y方向)からの方位をθとし、生成するポイントをPnm(m=1,2,3,‥)とすると、
Xnm=Xn-1+m×(Asinθ)
Ynm=Yn-1+m×(Acosθ)
となる。
【0104】
また、図9(c)の基本関数Fで関数近似されている区間では、図48に示すように、Pn-1→Pn間を直線と想定した場合のL’(初回はL'=A−b)進んだ位置Pn1'(Xn1',Yn1')を算出する。このとき、Pn1’の座標は、
Xn1’=Xn-1+1×(L’sinθ)
Yn1’=Yn-1+1×(L’cosθ)
となる。Pn1'に対応する関数F上の点をPn1(=F(Pn1’))とする。Pn-1→PnをX’軸、Pn-1を通りX’軸に直交する軸をY’軸とするX'-Y’座標系の下で、Pn1のX’座標はL’、Pn1のY’座標はF(1×L')である。このX'-Y’座標系を角度(90−θ)だけ回転して、その座標値をX-Y座標系の座標値に変換すると、Pn1(Xn1,Yn1)の座標は、
Xn1 =Xn1’+{F(1×L’)sin(θ−90)}
Yn1 =Yn1’+{F(1×L’)cos(θ−90)}
となる。
【0105】
ここで、Pn-1→Pn1間の距離Ln1が、A+b(メートル)以内の時は、Pn2の算出に進む。Pn-1→Pn1間の距離Ln1が、A+b(メートル)より大きい時は、L’=L’/2として再計算する。
以降は、このバイナリサーチの算出方法を繰り返す。
【0106】
ノード列復元部12のこのような処理により、圧縮されていたデータは等間隔の座標列に変換される。そのため、マップマッチング部13のマッチング処理が容易になる。
【0107】
このノード列復元部12の処理は、ソフトウエアによって実現しても良いし、IC化したハードウエアで実現しても良い。
【0108】
このように、この実施形態の方法では、データ圧縮されたデータ列から、等間隔のデータ列を復元しているため、マッチング処理が容易になり、マップマッチングの精度を高めることができる。
【0109】
(第11の実施形態)
第11の実施形態では、デジタル地図データの道路以外の形状を伝達する位置情報伝達方法について説明する。
【0110】
デジタル地図データには、図34に示すように、施設形状を表すベクトル列(V)や、図35に示すように、県境形状を表すベクトル列(X)、湖沼形状を表すベクトル列(Y)、等高線形状を表すベクトル列(W)などが含まれる。これらの形状は、これまで説明して来た道路形状の表示方法を利用して表示し、また、その事象位置を特定することができる。
【0111】
図36は、家屋形状を表す形状データを示している。形状ベクトル種別には家屋と記述し、詳細情報として、ビル、一般家屋などの識別コードを記述する。次いで、ノード総数と家屋形状を表す各ノード座標とを記述し、事象発生位置を、先頭のノード位置からの相対距離で規定する。
【0112】
図37は、水系形状を表す形状データを示している。形状ベクトル種別には水系と記述し、詳細情報として、湖などの面表現水系、河川などの線表現水系の識別コードを記述する。その他は家屋形状の場合と同じである。
図38は、行政界形状を表す形状データを示している。形状ベクトル種別には行政界と記述し、詳細情報として、都道府県境、市区町村境、町丁目境の識別コードを記述する。
また、図39は、等高線形状を表す形状データを示している。形状ベクトル種別には等高線と記述し、詳細情報として、海抜何メートル等高線の識別コードを記述する。
【0113】
こうした位置情報を伝達することにより、送信側と受信側とで異種のデジタル地図を装備している場合でも、家屋、水系、行政界、等高線などを相互に同定し、事象発生位置を伝え合うことができる。
【0114】
(第12の実施形態)
第12の実施形態では、デジタル地図上の道路以外の位置を伝達する位置情報伝達方法について説明する。
【0115】
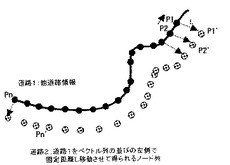
図40に示すように、デジタル地図上の黒三角形で示す道路外の位置(再現位置)を伝達する場合、送信側は、道路上に位置する三つの基準点(事象点1、事象点2、事象点3)を設定し、事象点1を含む道路区間(マップマッチングデータ1)の形状データ、事象点1から再現位置までの距離r1及び方位θ1のデータ、事象点2を含む道路区間(マップマッチングデータ2)の形状データ、事象点2から再現位置までの距離r2及び方位θ2のデータ、並びに、事象点3を含む道路区間(マップマッチングデータ3)の形状データ、事象点3から再現位置までの距離r3及び方位θ3のデータを受信側に伝達する。
【0116】
受信側では、図41に示す手順で再現位置を再現する。
ステップ481:マップマッチングデータ1を用いてマップマッチングを実行し、
ステップ482:道路上の事象点1を特定する。
ステップ483:事象点1から距離r1、方位θ1にある地点P1を求める。
同様の手順を繰り返して、マップマッチングデータ2から事象点2を特定し、事象点2から距離r2、方位θ2にある地点P2を求め、マップマッチングデータ3から事象点3を特定し、事象点3から距離r3、方位θ3にある地点P3を求める。
ステップ484:点P1、P2、P3の重心を算出し、
ステップ489:重心位置を再現位置とする。
【0117】
また、3つの事象点は、図42に示すように、一本の道路(マップマッチングデータ)上に設定しても良い。この場合、各々事象点から見た再現位置は、x座標及びy座標の差分データ(Δxn、Δyn)を用いて表すことができる。
【0118】
この位置情報を受信した受信側では、図43に示す手順で再現位置を再現する。
ステップ501:マップマッチングデータを用いてマップマッチングを実行し、
ステップ502:道路上の事象点1を特定し、
ステップ503:事象点1からΔx1、Δy1の地点P1を求める。
【0119】
同様に、ステップ502及びステップ503を繰り返し、事象点2からΔx2、Δy2の地点P2、及び事象点3からΔx3、Δy3の地点P3を求める。
ステップ504:点P1、P2、P3の重心を算出し、
ステップ505:重心位置を再現位置とする。
【0120】
こうして、道路以外の位置を表すことができる。なお、マップマッチングデータとしては、道路以外に、第3の実施形態で説明した施設形状を表すベクトル列や、県境形状を表すベクトル列、湖沼形状を表すベクトル列、等高線形状を表すベクトル列などを用いることもできる。
【0121】
なお、ここでは、三つの基準点から目標位置までの相対情報(距離及び方位の情報)を伝達する場合について示したが、送信側から、二つの基準点、あるいは、一つの基準点からの相対情報しか伝えなかった場合でも、受信側では、その基準点を自己のデジタル地図上で高精度に特定することができるため、その基準点からの相対情報により、目標位置を統計的に求めることが可能である。
【0122】
また、各実施形態では、形状データに含める各ノードの座標データを経度・緯度データの絶対値または相対値で表しているが、各ノードの座標データは、他のパラメータを用いて表しても良い。
【0123】
例えば、図49に示すように、xy座標により(xj-1,yj-1)、(xj,yj)及び(xj+1,yj+1)で表されるノードPj-1、Pj及びPj+1が存在し、直線Pj-1→Pjの距離がLj、直線Pj-1→Pjの絶対方位(北を基準とした時計回り方向の角度)がωj-1、直線Pj→Pj+1の距離がLj+1、直線Pj→Pj+1の絶対方位がωjであるとすると、ノードPjは、前ノードPj-1からの距離Ljと絶対方位ωj-1とを用いて特定することができる。
【0124】
ここで、Lj及びωj-1は、Pj-1及びPjのxy座標値から次式により算出することができる。
Lj =√{(xj−xj-1)2+(yj−yj-1)2}
ωj-1=tan-1{(xj−xj-1)/(yj−yj-1)}
ノードPj+1についても、同様に、前ノードPjからの距離Lj+1と絶対方位ωjとを用いて特定することができる。
【0125】
また、ノードPj+1は、前ノードPjからの距離Lj+1と偏角、つまり、Pj→Pj+1の絶対方位ωjとPj-1→Pjの絶対方位ωj-1との変位差Θj、を用いて特定することもできる。偏角Θjは、Pj-1、Pj及びPj+1の各xy座標値から次式により算出することができる。
Θj =ωj−ωj-1
= tan-1{(xj+1−xj)/(yj+1−yj)}
−tan-1{(xj−xj-1)/(yj−yj-1)}
【0126】
図50は、形状データに含まれるノード列情報を、前ノードからの距離と偏角とを用いて表した送信データを例示している。図50(a)の送信データは、ノードp1とノードp2との間の補間点#1〜#aのデータを含み、この補間点のデータが、前ノードまたは前補間点からの距離と偏角とのデータで構成されている。始端となるノードp1に関しては、位置を表す絶対座標(経度、緯度)と、切片方向絶対方位(p1と補間点#1とを結ぶ直線の絶対方位)とのデータを含んでいる。また、補間点#1のデータは、補間点#1から補間点#2に延びる直線の絶対方位と前記切片方向絶対方位との方位差を表す偏角データと、p1から補間点#1までの距離データとで構成され、補間点#2のデータは、同様に、補間点#2から補間点#3に延びる直線の絶対方位と補間点#1から補間点#2に延びる直線の絶対方位との偏角データと、前補間点#1から補間点#2までの距離データとで構成されている。補間点#3〜#aに関しても同様である。
【0127】
また、図50(b)の送信データは、始端のノードp1を除く各ノードのデータが、前ノードからの距離と偏角とで構成されている。
【0128】
図51は、元地図データの対象道路区間の形状(a)と、それを前ノードからの距離と偏角とで表した座標列(b)とを模式的に示している。なお、図51に示すように、対象道路区間の元地図データから、対象道路区間の形状を、より少ない数で再現できるノードをリサンプルし、リサンプルしたノードを前ノードからの距離と偏角とで表現するようにしても良い。
【0129】
図52は、この送信データを受信した受信側でのマップマチング処理を模式的に示している。このマップマチングでは、自己のデジタル地図上で、まず、形状データの始端ノードp1に対応する候補点を設定する。そのために、始端ノードp1の緯度・経度データ位置から、概ね200m以内にあるn個の近隣道路上にn個の候補点を設定する。
次に、始端ノードp1位置から各候補点P1,iまでの距離Diを算出する。
【0130】
次に、図53に示すように、各道路の現在の候補点Pj,iから、道路に沿って、形状データのpj→pj+1間の距離Ljだけ進んだ点Pj+1,iを求め、Pj-1,i→Pj,iを結ぶ直線とPj,i→Pj+1,iを結ぶ直線とのなす角θj,iと、形状データで表されたpjの相対方位Θjとの差|Δθj,i|を算出し、次式により評価値εj,iを算出する。
εj,i = α×Di+Σ(β×|Δθj,i|)
(Σはj=1からjまで加算)
α:予め決めた係数
β:予め決めた係数
次いで、候補点Pj,iを候補点Pj+1,iに移動する。
【0131】
こうした処理を全ての候補点について繰り返し、また、同様の処理を、形状データに含まれる全てのノードについて実行する。形状データに含まれた全てのノードについての処理が終了すると、評価値εiの最も小さい候補を対象道路として選択する。
【0132】
このマップマッチング処理では、形状データに含まれる「前ノードからの距離Li」を用いて、次の候補点を容易に求めることができ、また、形状データに含まれる「相対方位」を直接用いて、評価値を算出することができる。そのため、受信側でのマップマッチングの処理負担が軽減される。
【0133】
また、本発明の位置情報伝達方法は、送信側及び受信側装置のコンピュータの動作手順をプログラムにより規定して実現することができる。
【0134】
以上、本発明の各種実施形態を説明したが、本発明は前記実施形態において示された事項に限定されず、明細書の記載、並びに周知の技術に基づいて、当業者がその変更・応用することも本発明の予定するところであり、保護を求める範囲に含まれる。
【産業上の利用可能性】
【0135】
以上の説明から明らかなように、本発明のデジタル地図の位置情報伝達方法を用いることにより、デジタル地図上の位置を効率的、且つ、正確に伝達することが可能となる。
【符号の説明】
【0136】
10、20 位置情報送受信装置
11、22 位置情報受信部
12 ノード列復元部
13 マップマッチング部
14 デジタル地図データベース
15 デジタル地図表示部
16 事象入力部
17 位置情報変換部
18、21 位置情報送信部
【技術分野】
【0001】
本発明は、デジタル地図の位置情報を伝達する方法と、それに使用する装置に関し、特に、デジタル地図上の位置を効率的且つ的確に伝えることを可能にするものである。
【背景技術】
【0002】
近年、ナビゲーション車載器を搭載する車両が急激に増加している。ナビゲーション車載機は、デジタル地図データベースを保持し、交通情報センターなどから提供される渋滞情報や事故情報に基づいて、渋滞や事故位置を地図上に表示し、また、それらの情報を条件に加えて経路探索を実施する。
【0003】
デジタル地図のデータベースは、我が国では数社で作成されているが、基図及びデジタイズ技術の違いから、この地図データには誤差が含まれており、その誤差は各社のデジタル地図によって違っている。
交通情報などで、例えば事故位置を伝える場合、その位置の経度・緯度データを単独で提示すると、車載器では、保持しているデジタル地図データベースの種類により、異なる道路上の位置を事故位置として識別してしまう虞れがある。
【0004】
こうした情報伝達の不正確さを改善するため、従来は、道路網に存在する交差点などのノードにノード番号が、また、ノード間の道路を表すリンクにリンク番号が定義されており、各社のデジタル地図データベースでは、各交差点や道路がノード番号及びリンク番号と対応付けて記憶され、また、交通情報では、道路をリンク番号で特定し、その先頭から何メートル、と云う表現方法で道路上の地点が表示される。
【0005】
しかし、道路網に定義したノード番号やリンク番号は、道路の新設や変更に伴って新しい番号に付け替える必要があり、また、ノード番号やリンク番号が変更されると、各社のデジタル地図データも更新しなければならない。そのため、ノード番号やリンク番号を用いてデジタル地図の位置情報を伝達する方式は、そのメンテナンスに多大な社会的コストが掛かることになる。
【0006】
こうした点を改善するため、本発明の発明者等は、特願平11−214068号において、情報提供側が、道路位置を伝えるために、その道路位置を含む所定長の道路区間の道路形状を示す座標列から成る「道路形状データ」と、この道路形状データで表される道路区間内の道路位置を示す「相対位置データ」とを伝達し、これらの情報を受信した側では、道路形状データを用いてマップマッチングを行い、デジタル地図上の道路区間を特定し、相対位置データを用いてこの道路区間内の道路位置を特定する方式を提案し、また、特願平11−242166号において、上記「道路形状データ」の伝送データ量を削減しても、受信側でのマップマッチングを正確に実施できるように、道路種別、道路番号、道路区間内のノードの交差リンク数、交差リンク角度、交差点名などの「付加情報」を併せて伝送する方式を提案し、さらに、受信側での誤マッチングを招来しない範囲で「道路形状データ」の伝送データ量を間引く方式について提案している。
【0007】
この場合、受信側でのマップマッチングは、例えば次のように行われる。
図45に示すように、A〜B区間で渋滞が発生している道路の道路形状を表す
「道路形状データ」として、地点P0(x0,y0)、P1(x1,y1)、‥、Pk(xk,yk)の経度・緯度データが
(x0,y0)(x1,y1)‥(xk,yk)
のように伝えられると、受信側は、図44に示すように、自己のデジタル地図データベースから読み出した地図データを用いて、P0(x0,y0)地点を中心とする誤差の範囲に含まれる道路を候補として選定し、その中から、伝送された「付加情報」を用いて候補を絞り込む。候補が1つに絞り込めたときは、その道路の(x0,y0)及び(xk,yk)に最も近い位置を求め、その区間を「道路形状データ」で表された道路区間とする。
【0008】
候補が1つに絞り込めず、道路Q、Rが候補として残った場合は、P0(x0,y0)に最も近い各候補道路上の位置Q0、R0を求め、P0〜Q0、P0〜R0間の距離を算出する。この操作をP1(x1,y1)、‥、Pk(xk,yk)の各点について実行し、各点P0、P1、‥、Pkからの距離の二乗平均の加算値が最小となる道路区間を求め、これを「道路形状データ」が表す道路区間とする手法等により、道路区間を特定する。
A〜Bの渋滞区間は、「道路形状データ」から求めた道路区間の開始位置を起点に、伝送された「相対位置データ」に基づいて特定する。
【発明の概要】
【発明が解決しようとする課題】
【0009】
交通情報などで、デジタル地図上の位置情報を伝達する場合は、相手方に正しい位置が短時間で認識できるようにデータを伝送する必要がある。
また、デジタル地図上の位置情報を伝達する場面としては、山岳での遭難現場や河川事故などの情報を伝える場合も想定されるため、道路以外の地図形状や道路上以外の地点の位置情報を伝達することも必要になる。
【0010】
本発明は、こうした課題に応えるものであり、デジタル地図上の地図形状を特定する「形状データ」と、この「形状データ」で特定した地図形状の中の相対位置を特定する「相対位置データ」とを用いてデジタル地図の位置情報を伝達する方法をさらに改良し、デジタル地図上の位置を効率的に、且つ、正確に伝達することができ、また、道路形状や道路上の地点以外の位置情報についても伝達することができるデジタル地図の位置情報伝達方法を提供し、また、それに使用する装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
本発明は、位置情報送信装置及び位置情報受信装置を含む位置情報伝達システムであって、前記位置情報提供装置及び前記位置情報受信装置はそれぞれデジタル地図を備え、前記位置情報送信装置は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備え、前記位置情報受信装置は、前記道路形状データを受信する手段と、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段と、を備えたことを特徴とする。
【0012】
本発明は、位置情報送信装置及び位置情報受信装置がそれぞれデジタル地図を備え、前記それぞれのデジタル地図間におけるデジタル地図上の位置情報伝達方法であって、前記位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行し、前記位置情報受信装置は、前記道路形状データを受信するステップと、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、を実行する。
【0013】
本発明は、デジタル地図を備えた位置情報受信装置に対し、自己のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信装置であって、当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備えたことを特徴とする。
【0014】
本発明は、デジタル地図を備えた位置情報受信装置に対し、位置情報送信装置のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信方法であって、当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行する。
【0015】
本発明は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信する手段と、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段とを備えたことを特徴とする位置情報受信装置である。
【0016】
本発明は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信するステップと、前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、を備えたことを特徴とする位置情報受信方法である。
【0017】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、前記位置情報送信装置は、第1のデジタル地図の第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、前記生成した位置情報を位置情報受信装置に送信する送信手段と、を備え、前記位置情報受信装置は、前記生成された位置情報を受信する受信手段と、前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定する手段と、を備えたことを特徴とする。
【0018】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、前記位置情報送信装置は、前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、前記位置情報受信装置は、前記生成された位置情報を受信するステップと、前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定するステップと、を実行する。
【0019】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備えることを特徴とする。
【0020】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を備えることを特徴とする。
【0021】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、前記位置情報送信装置は、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備え、前記位置情報受信装置は、前記生成された位置情報を受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、を含むことを特徴とする。
【0022】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、前記位置情報送信装置は、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、前記位置情報受信装置は、前記生成された位置情報を受信する受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、を実行する。
【0023】
本発明は、第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、当該位置情報送信装置は、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備える。
【0024】
本発明は、第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、前記生成した位置情報を前記位置情報受信装置に送信するステップと、を備える。
【0025】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける前記位置情報受信装置であって、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、を含むことを特徴とする。
【0026】
本発明は、位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける位置情報受信方法であって、前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、を含む。
【0027】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムであって、前記位置情報送信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段と、を含み、前記位置情報受信装置は、前記生成された位置情報を受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、を含む。
【0028】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報伝達方法であって、前記位置情報送信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを実行し、前記位置情報受信装置は、前記生成された位置情報を受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、を実行する。
【0029】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信装置であって、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段を含む。
【0030】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信方法であって、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを含む。
【0031】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報受信装置であって、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信する受信手段と、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、を含む。
【0032】
本発明は、第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報受信方法であって、前記位置情報受信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信するステップと、前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、を実行する。
【発明の効果】
【0033】
以上の説明から明らかなように、本発明のデジタル地図の位置情報伝達方法では、デジタル地図上の位置を効率的、且つ、正確に伝達することができる。
【0034】
形状データに、方位情報や高さ情報、方向識別フラグによる一方通行情報などを付加して伝達する方法では、マッチング精度を高め、マッチングの所要時間を短縮することが可能になる。
【0035】
また、形状データ列を関数で近似したり、二条線の形状データをオフセット距離で表示する伝達方法では、データ量を減らし、データ伝送効率を高めることができる。
【0036】
また、道路区間内の交差点などに基準点を設定して事象位置までの相対距離を表示したり、ノード番号で事象位置を規定する伝送方法では、受信側での事象位置の特定精度を高めることができる。
【0037】
また、方向識別フラグを用いることにより、事象の影響が及ぶ車両進行方向を特定することができる。
【0038】
また、圧縮されている形状データ列から等間隔のデータを復元する方法及び装置では、受信側でのマッチング効率を高めることができる。
【0039】
また、本発明の伝達方法では、旅行時間を伝達したり、また、地図データの著作権を損なわない形でのデータを伝達したりすることも可能である。
【0040】
また、本発明は、道路以外のベクトルデータの伝達にも応用することができ、また、デジタル地図上の道路外の位置を伝達することもできる。
【図面の簡単な説明】
【0041】
【図1】第1の実施形態の形状データを説明する図
【図2】第1の実施形態の送信側での形状データの生成手順を示すフロー図
【図3】第1の実施形態でのノード列情報を示す図
【図4】第1の実施形態での受信側のマップマッチングを説明する図
【図5】第1の実施形態での受信側のマップマッチング手順を示すフロー図
【図6】第2の実施形態の形状データを説明する図
【図7】第2の実施形態でのノード列情報を示す図
【図8】第2の実施形態での別の表現方法を取るノード列情報を示す図
【図9】第3の実施形態におけるデータ削減を示す図
【図10】第3の実施形態でのノード列情報を示す図
【図11】二条線の説明図
【図12】第4の実施形態での形状データを説明する図
【図13】第4の実施形態でのオフセットの方向を説明する図
【図14】第4の実施形態でのマスタ側のノード列情報を示す図
【図15】第4の実施形態でのマスタを参照する側のノード列情報を示す図
【図16】第4の実施形態での別の方式による形状データを説明する図
【図17】第5の実施形態での形状データを説明する図
【図18】第5の実施形態での形状データの生成手順を示すフロー図
【図19】第5の実施形態での遷移値の決定手順を示すフロー図
【図20】第6の実施形態での基準点を説明する図
【図21】第6の実施形態でのノード列情報、道路付加情報、事象情報を示す図
【図22】第7の実施形態でのノード列情報及び事象詳細情報を示す図
【図23】第7の実施形態でのノード列情報及び事象情報を示す図
【図24】第8の実施形態での事象発生状況を説明する図
【図25】第8の実施形態でのノード列情報、道路付加情報、事象情報を示す図
【図26】第8の実施形態での一方通行状況を説明する図
【図27】第8の実施形態で一方通行を表示するノード列情報を示す図
【図28】第8の実施形態でのマップマッチング手順を示すフロー図
【図29】第8の実施形態での二条線の事象を表す事象情報を示す図
【図30】第9の実施形態での旅行時間を説明する図
【図31】第9の実施形態でのノード列情報、道路付加情報、所要時間情報を示す図
【図32】第10の実施形態における位置情報送受信装置の構成を示すブロック図
【図33】第10の実施形態での形状データの圧縮、復号を説明する図
【図34】デジタル地図での施設形状ベクトルを示す図
【図35】デジタル地図での県境形状、等高線、湖沼形状を表すベクトルを示す図
【図36】第11の実施形態での家屋形状のノード列情報を示す図
【図37】第11の実施形態での水系形状のノード列情報を示す図
【図38】第11の実施形態での行政界形状のノード列情報を示す図
【図39】第11の実施形態での等高線形状のノード列情報を示す図
【図40】第12の実施形態での道路外位置表現方法を説明する図
【図41】第12の実施形態での位置再現手順を示すフロー図
【図42】第12の実施形態での別の道路外位置表現方法を説明する図
【図43】第12の実施形態での別の位置再現手順を示すフロー図
【図44】マップマッチングの一例を説明する図
【図45】道路形状データ及び相対位置情報を説明する図
【図46】切片方位を説明する図
【図47】第10の実施形態において直線近似された区間でのデータ復元方法を説明する図
【図48】第10の実施形態において関数近似された区間でのデータ復元方法を説明する図
【図49】ノード座標を前ノードとの距離及び偏角で表す方法を説明する図
【図50】ノード座標を前ノードとの距離及び偏角で表したノード列情報を示す図
【図51】ノード座標を前ノードとの距離及び偏角で表した形状データを模式的に示す図
【図52】ノード座標を前ノードとの距離及び偏角で表したときのマップマチング処理を模式的に示す図
【図53】ノード座標を前ノードとの距離及び偏角で表したときのマップマチング処理において、次の候補点の求め方を示す図
【発明を実施するための形態】
【0042】
(第1の実施形態)
第1の実施形態では、形状データに切片方位情報を加えて伝達し、受信側での道路区間を特定するマップマッチング精度を高めるための位置情報伝達方法について説明する。
【0043】
図1に示す道路2のP1からPNまでの道路形状を伝達するために、黒丸で示す各点の経度データ及び緯度データを形状データとして伝達する場合を例に説明する。ここで黒丸は、デジタル地図データベースに含まれる道路上のノード及びノードの補間点を表している。ノードは、交差点、トンネルの入口・出口、橋の入口・出口、行政区画の境界などに対応して設定されており、ノード番号が付されている。補間点は、ノード間の道路形状を再現するために設定されている点である。ここでは、特に断らない限り、ノード及び補間点を合わせてノードと呼ぶことにする。
【0044】
各ノードの経度データ及び緯度データは、送信側及び受信側のデジタル地図データベースに格納されているが、前述するように、そのデータには、それぞれ誤差が含まれている。
送信側は、道路形状を示す形状データに、P1、P2、‥、PNの経度・緯度データを含めて伝送するが、データ量を削減するため、P1の経度・緯度データは絶対座標値(経度、緯度)で表示し、P2、‥、PNの経度・緯度データはP1の経度・緯度データとの差分を示す相対座標値、または、1つ前のノードの経度・緯度データとの差分を示す相対座標値で表示する。
【0045】
形状データに含める切片方位情報は、図1の点線矢印で示すように、各ノード位置における切片方位、即ち、ノードpxにおいて道路曲線に接する接線の方位の情報である。
このノード位置での切片方位は、図46に示すように、真北の絶対方位を0度とし、時計回りに0度〜360度の範囲で表示する。ノードpxの切片方位は、ノードpxの上流側に位置する隣接ノードをpx-1、ノードpxの下流側に位置する隣接ノードをpx+1とするとき、ノードpx-1とノードpxとを結ぶ直線の方位θx-1と、ノードpxとノードpx+1とを結ぶ直線の方位θxとを平均し、
(θx-1+θx)/2
により求めることができる。
【0046】
図2は、送信側で各ノードの切片方位を求める手順を示しており、
ステップ91:地図データから各ノード位置を抽出し、
ステップ92:各ノード位置の切片方位を抽出する。
【0047】
こうして抽出された各ノードの切片方位は、図3に示すように、各ノードの経度・緯度データとともに、形状データを表すノード列情報として纏められる。このノード列情報には、ノード列が表すベクトルデータの種別(この場合は「道路」)と、ノード総数(N個)と、ノード番号P1からの各ノードに関する経度・緯度データ及び切片方位データとが並ぶ。ノード番号P1の経度・緯度データ及び切片方位データは絶対座標及び絶対方位で表示されるが、ノード番号P2からノード番号PNまでの経度・緯度データ及び切片方位データは、データ量を減らすため、相対座標及び相対方位で表示される。
このノード列情報は、ノード列情報によって表された道路区間内の事象位置を表す相対位置データとともに伝送フォーマットに変換されて伝送される。
【0048】
ノード列情報及び相対位置データを受信した受信側は、マップマッチングを実施してノード列情報で表示された道路区間を特定する。図5は、このマップマッチングでの手順を示している。
ステップ121:ノード番号PXの経度・緯度データに近い道路上の位置を、近い順にマッチング候補として抽出し、
ステップ122:その候補位置の切片方位とPXの切片方位との差分を求める。その差分が規定値より小さければマッチング候補とし、図44で説明したマップマッチングの対象とする。
【0049】
また、差分が規定値より大きい場合には、それをマッチング候補から除外し、ステップ121に戻って、次ぎに近いものをマッチング候補として抽出し、ステップ122の手順を実行する。
【0050】
図1において、道路2上の地点PXは、最も近い道路である道路1に誤マッチングしやすいが、図4に示すように、受信側では、マッチングに際して、地点PXに最も近い道路1上のマッチング候補点1と地点PXとの切片方位を比較することにより、マッチング候補点1を候補から除外することができ、地点PXに次に近い道路2上のマッチング候補点2を候補として残すことができる。
【0051】
このように、この実施形態の位置情報伝達方法では、位置情報に切片方位情報を含めることにより、受信側でのマッチング精度を高め、短時間での候補の絞り込みを可能にする。そのため、受信側では、伝達されたデジタル地図上の位置を正確且つ迅速に認識することができる。
【0052】
なお、この実施形態では、道路形状を示す形状データに、道路のノード及び補間点の座標データを含める場合について説明したが、道路形状上で一定間隔ごとに座標点をリサンプルし、道路形状を示す形状データには、前記座標点の座標データを含めるようにしてもよい。
【0053】
(第2の実施形態)
第2の実施形態では、形状データに高さのデータを加えて伝達する位置情報伝達方法について説明する。
【0054】
図6は、デジタル地図データが、経度、緯度及び高さの3次元で表現されている場合の道路を表すベクトルデータ列を模式的に示している。
この場合、送信側は、形状データのノード列情報に、図7に示すように、各ノードのX方向座標(経度)、Y方向座標(緯度)及びZ方向座標(標高)を含めて受信側に伝達する。
【0055】
受信側では、第1の実施形態の切片方位情報と同様に、マッチングに際して、X−Y平面上の距離に基づいて選択したマッチング候補点のZ方向座標を参照することにより、候補点を絞り込むことができ、伝達されたデジタル地図上の位置を正確且つ迅速に認識することができる。
【0056】
なお、各ノードのZ方向座標は、標高で表したが、地表面からの高さで表示しても良い。このように、地表面からの高さのデータを形状データに含めることにより、高架道路と、その下を通る一般道路とを区別することが可能になる。
また、図8に示すように、各ノードのZ方向座標は、1つ手前のノードとの勾配で表示しても良い。
【0057】
(第3の実施形態)
第3の実施形態では、形状データを関数で近似して、伝達するデータ量を削減する位置情報伝達方法について説明する。
【0058】
図9(a)に示すP1からPnまでのベクトルデータ列の内、P1からPm1まで、及び、Pm1からPm2までの形状を、図9(c)に示すコサインカーブ等の基本関数F(h,r1,r2)で近似する。h,r1,r2は、この関数のパラメータである。
【0059】
この近似を行うことにより、図9(b)に示すように、P1からPm2までは、P1、Pm1及びPm2の座標データと、F(a,b,c)で示すP1〜Pm1間を近似した関数及びそのパラメータと、F(d,e,f)で示すPm1〜Pm2間を近似した関数及びそのパラメータとで表すことができ、データ量を削減できる。
図10は、この場合のノード列情報を示している。
【0060】
受信側では、この形状データを受信すると、P1とPm2との間は、P1、Pm1及びPm2の座標データとパラメータとからF(a,b,c)及びF(d,e,f)で表示された形状を求め、その形状の上に任意の間隔で地点を設定してマップマッチングを実施する。
この場合、F(a,b,c)及びF(d,e,f)で表される形状は、図9(a)のP1からPm1及びPm1からPm2までの形状と正確に一致しなくても、受信側で誤マッチングを生じない程度に近似していれば良い。
【0061】
この実施形態の位置情報伝達方法では、伝達するデータ量を大幅に削減することができ、データ伝送の効率化を図ることができる。
【0062】
(第4の実施形態)
第4の実施形態では、平行する道路の道路形状データを少ないデータ量で伝達する位置情報伝達方法について説明する。
【0063】
高速道路や有料道路は、図11に示すように、多くのデジタル地図において上下線分離道路で表現され、二条線と呼ばれている。この二条線の場合には、図12に示すように、一方の道路(道路2)の道路形状データは、他方の道路(道路1)の道路形状データを利用して、データ量を圧縮することができる。
【0064】
この場合、道路2のノード地点P1’、P2’、‥、Pn’は、道路1におけるノード地点P1、P2、‥、Pnを、道路1の右側(または左側)に、一定のオフセット距離(L)だけ移動した地点として近似することができる。オフセットする方向は、図13に示すように、道路1の各ノード地点P1、P2、‥、Pnの切片方向と直交する方向である。
【0065】
ノード列情報には、図14に示すように、先頭に、形状データの識別番号である形状ベクトル列識別番号と、参照すべき形状データを表す参照ベクトル列番号とを記述する。マスタとなる道路1のノード列情報では、参照ベクトル列番号は「無し」となり、各ノードについて、第1の実施形態と同様(図3)、経度・緯度データと切片方位データとを記述する。
【0066】
一方、道路1の形状データを参照する道路2のノード列情報は、図15に示すように、道路2の形状ベクトル列識別番号と、参照先の道路1の形状データを表す参照ベクトル列番号と、オフセット距離と、オフセット方向(マスタとなるノード列の右か左か)とを記述する。
【0067】
このように、平行する道路の場合には、一方の道路の道路形状データを利用して他方の形状データを表すことにより、伝送すべきデータ量を大幅に削減することができる。
【0068】
なお、この方式では、二条線の一方の実在する道路形状から、一定距離オフセットして、他方の道路を写像して再現しているが、この場合には、曲率の大きい急なカーブ部分で誤差が大きくなると云うウイークポイントを持つ。写像により再現される位置の誤差をできるだけ小さくするには、図16に示すように、二条線の中心線を求め、この実在しない「仮想の中心線形状ベクトルデータ列」をマスタとして送信し、上り路線及び下り路線の形状データは、両方とも、マスタを参照し、オフセット距離及びオフセット方向だけで規定するようにしても良い。
また、ここでは二条線について説明したが、多数の道路が並走する格子状道路を対象として、この実施形態の方式を適用することも可能である。
【0069】
(第5の実施形態)
第5の実施形態では、デジタル地図の著作権を損なうことが無いように、形状データを崩して伝達する位置情報伝達方法について説明する。
【0070】
デジタル地図は、その地図の制作者が独自の工夫を凝らして地図形状を設定しており、地図形状に対して制作者が著作権を有している。そのため、地図形状を形状データでそのまま伝達した場合には、デジタル地図の著作権を損なう虞れが発生する。この実施形態の位置情報伝達方法では、そうした懸念を除くため、元の地図形状を、受信側で誤マッチングが発生しない程度に、多少変形して伝達する。
【0071】
図17は、この場合の形状データの変形を模式的に示している。地図データの持つ本来の位置をPxとするとき、この位置をPx’の位置に変形する。このとき、PxからPx’までの距離(遷移値B)は、地点Pxから隣接する道路までの距離Lに基づいて設定し、また、PxからPx’への方位(遷移方位θ)は乱数で決定する。
【0072】
図18は、Px’を算出する手順を示している。
ステップ261:地図データからノード位置Pxを抽出して、
ステップ262:隣接道路までの距離Lを計算し、
ステップ263:遷移値Bを決定する。
【0073】
この遷移値Bの決定は、図19に示す手順により、
ステップ271:B=L×β1によりBを求める。ここで、β1は、あらかじめシステムで決めた1未満の値(例、β1=0.1)である。
ステップ272:ステップ271で求めたBをβ2と比較する。β2は、あらかじめシステムで決めた距離(例、β2=150m)である。B>β2であるときは、
ステップ273:B=β2と決定する。
また、ステップ272において、B≦β2であるときは、ステップ271で求めた値をBと決定する。
【0074】
こうして遷移値Bを決定すると、
ステップ264:遷移方位θを次式によって決定する。
θ=R×360 (度)
ここで、Rは乱数発生関数であり、0〜1の一様乱数である。なお、θは、真北の絶対方位を0度として、時計回りに0度〜360度の絶対方位を表現している。
ステップ265:決定した遷移値B及び遷移方位θを用いて、遷移後の座標Px’を計算する。
【0075】
こうした手順により、地図データを、受信側で誤マッチングが発生しない程度に、変形することができる。
【0076】
なお、地図データの変形方法としては、この他に、Pxの座標値に対して緯度方向に乱数Cを加算し、経度方向に乱数Dを加算して遷移後の座標Px’を求める方法、あるいは、本来の位置からの遷移値をσ=Aの正規分布となるように乱数で決定する方法などを用いることもできる。
【0077】
(第6の実施形態)
第6の実施形態では、形状データで特定した道路区間の中の相対位置を、この道路区間の中に適宜定義した基準点を用いて特定し、この情報を伝達する位置情報伝達方法について説明する。
【0078】
図20に示すように、形状データによりP1からPnまでのノード列を伝達し、この中の事故位置を伝える場合に、この実施形態の方法では、ノード列の途中の交差点のノードP4を基準点に取り、P4からの相対距離によって事故位置を表示する。
また、この道路区間に発生している渋滞を、T字路のノードPxを基準点に取り、Pxからの相対距離によって表示する。
このように、道路区間内に定義した基準点を用いて表示する相対位置情報は、図21に示すデータによって受信側に伝達される。
【0079】
図21(a)は、道路区間を特定するノード列情報である。図21(b)は、特願平11−242166号で提案している道路付加情報であり、対象とする道路の道路種別コード、道路番号、有料道路コードとともに、この道路区間に含まれる交差点ノードに関して、ノード列情報にリンクするノード番号、その交差点ノードの接続リンク数、各接続リンクの接続リンク角度が、それぞれの交差点ノードごとに表示されている。
【0080】
図21(c)は、道路区間内の相対位置と、その位置で発生している事象の事象内容とを表示する事象情報であり、相対位置は、基準点を明示し、そこからの相対距離で表示される。
【0081】
このように、送信側が、道路区間内の交差点などの識別し易いノードを基準点として定義することにより、受信側では、事象発生位置を的確に把握することが可能になる。
【0082】
(第7の実施形態)
第7の実施形態では、各ノード情報と当該ノードでの発生事象とを直接関連付けて表示し、伝達する位置情報伝達方法について説明する。
【0083】
この方法では、図22(a)に示すように、ノード列情報の中で、各ノード番号の座標データに続けて、当該ノードで発生している該当事象を該当事象コードで記述し、図22(b)に示すように、各該当事象コードで表した事象内容を事象詳細情報として記述する。
あるいは、図23(a)に示すように、ノード列情報には、ノード番号と座標データとだけを記述し、図23(b)に示すように、事象情報として、事象内容と、その事象が発生しているノード番号とを記述する。
この方法では、受信側において、事象発生位置を高精度に再現することができる。
【0084】
(第8の実施形態)
第8の実施形態では、道路上の位置情報を、車両の進行方向の情報を含めて伝達する位置情報伝達方法について説明する。
例えば、道路上の事故が上り車線の走行にだけ影響し、下り車線には影響しない場合がある。こうしたとき、交通情報では、事故発生位置と、事故の影響を受ける車線の情報とを伝達する必要がある。
【0085】
図24は、道路上で、車両進行方向1の方向に走行している車両が影響を受ける事象A(通行止)と、車両進行方向2の方向に走行している車両が影響を受ける事象B(車線規制)とが発生している状態を模式的に示している。
【0086】
このとき、道路上の位置情報は、図25に示すデータによって受信側に伝達される。
図25(a)は、道路区間を特定するノード列情報である。このノード列情報では、ノード列の並び順に対する順方向を2、ノード列の並び順に対する逆方向を1とする方向定義が規定されている。図25(b)は、第6の実施形態(図21)と同様の道路付加情報である。
【0087】
図25(c)は、事象情報であり、各事象について、事象内容、及び基準点からの相対距離とともに、その事象が影響を与えている車両進行方向を、方向定義を示す方向識別フラグにより表示している。即ち、事象Aは、車両進行方向1の方向に走行する車両が影響を受けるため、方向識別フラグには、逆方向を定義する1が表示され、事象Bは、車両進行方向2の方向に走行する車両が影響を受けるため、方向識別フラグには、順方向を定義する2が表示される。
【0088】
このデータを受信した受信側では、ノード列情報で表示されたノードP1、P2、‥、Pnの一方向の配列に対するマップマッチングで道路区間を特定し、事象情報に記述された相対情報と方向識別フラグの情報とに基づいて、道路区間内の事象発生位置を、車両進行方向を含めて特定することができる。そのため、一方向の形状データで両方向の事象を表現することが可能になり、データ量の圧縮が可能となる。
【0089】
また、この方向識別フラグは、第4の実施形態で説明した二条線の一方で発生した事象を記述する場合にも使用することができ、図29に示すように、形状ベクトル列識別番号123の道路(図14)を写像して再現した、形状ベクトル列識別番号124の道路(図15)で発生した事象であることを、方向識別フラグ(=1)により表示することができる。なお、この道路での事象情報は、ノード番号として写像後のノード番号(Pn’)を使用して表示する。
【0090】
また、方向識別フラグは、形状データで特定する道路区間の一方通行を表示する場合にも使用することができ、図26に示すように、ノード列の並び順に対して、順方向を1、逆方向を2と方向定義した場合、形状データで特定される道路区間がPn→P1方向の一方通行であるとき、図27に示すように、ノード列情報に一方通行方向を2と指定する方向識別フラグを記述して、一方通行情報を表示することができる。なお、一方通行で無い場合は、0(=一方通行無し)で表示する。
【0091】
このノード列情報を受信した受信側では、マップマッチングに際して、図28に示すように、
ステップ341:ノード列情報を受信し、
ステップ342:マップマッチングを実施して、マッチング候補の道路地点を抽出する。
ステップ343:その候補地点の地図データ上での一方通行の指定と、ノード列情報の一方通行方向情報とを比較する。それらが一致するときは、そのマッチング候補を残し、不一致であるときは、マッチング候補から除外して、ステップ342に戻り、次ぎのマッチング候補を抽出する。
【0092】
このように、方向識別フラグを使用することにより、一方通行の情報や、発生した事象が影響を及ぼす車両進行方向の情報などを、少ないデータ量で伝達することができる。
【0093】
(第9の実施形態)
第9の実施形態では、交通情報として、2地点間の旅行時間を伝える位置情報伝達方法について説明する。
【0094】
この方法では、図30に示すように、2つの基準点(P4、Px)を設定し、この基準点間の旅行時間を図31に示すデータで伝達する。
図31(a)は、この2つの基準点を含む道路区間を特定するためのノード列情報である。図31(b)は、第6の実施形態で説明した図21(b)と同様の道路付加情報である。図31(c)は、旅行時間を表示する所要時間情報であり、始端側ノード番号(P4)、終端側ノード番号(Px)及びその間の旅行時間が記述される。
【0095】
この情報を受信した受信側では、ノード列情報及び道路付加情報を用いて、マップマッチングで道路区間を特定し、所要時間情報から、基準点間の旅行時間を認識することができる。
【0096】
(第10の実施形態)
第10の実施形態では、データ圧縮された位置情報を受信した受信側で、マップマッチングがし易いベクトルデータ列を再生する方法について説明する。
【0097】
図32は、位置情報を受信して再生し、また、事象発生を知らせる位置情報を生成して送信する位置情報送受信装置10を示している。
この装置10は、他の装置20の位置情報送信部21から送られた位置情報を受信する位置情報受信部11と、この位置情報に含まれる形状データをマップマッチングがし易いベクトルデータ列に変換するノード列復元部12と、デジタル地図データを蓄積するデジタル地図データベース14と、マップマッチングを実施して位置情報で表された道路区間を特定するマップマッチング部13と、位置情報で表された道路区間と事象位置とを表示するデジタル地図表示部15と、発生した事象情報を入力する事象入力部16と、事象発生位置を伝達するための位置情報を生成する位置情報変換部17と、生成された位置情報を他の装置20の位置情報受信部22に送信する位置情報送信部18とを備えている。
【0098】
この装置10では、位置情報受信部11が位置情報を受信し、ノード列復号部12が、そこに含まれる関数近似や間引きによりデータ圧縮された形状データを等間隔の形状ベクトルデータ列に変換する。図33(a)は、圧縮前の形状ベクトルデータ列を示し、図33(b)は、間引き及び関数近似により圧縮されたデータを示している。ノード列復号部12は、この図33(b)のデータから、図33(c)に示すように、等間隔の形状ベクトルデータ列を復元する。
【0099】
マップマッチング部13は、デジタル地図データベース14に蓄積された地図データから、復元された形状ベクトルデータ列にマッチングする道路区間を検出し、また、この道路区間の事象発生位置を位置情報から特定して、デジタル地図表示部15にそれらを表示する。
また、事象情報入力部16から事象情報が入力されると、位置情報変換部17は、事象発生位置を含む道路区間と、この道路区間内の事象発生位置とを指定する位置情報を生成し、この位置情報が位置情報送信部18から送信される。
【0100】
このノード列復元部12の具体的な動作について説明する。
送信側では、地図データから図33(a)に示す形状ベクトルデータ列を取得すると、その一部の形状ベクトルデータ列を関数Fで近似し、また、直線的な部分はデータを間引き、こうしてデータ量を圧縮したデータを送信する。
【0101】
なお、関数Fで近似する方法については第3の実施形態で説明した。また、データを間引く方法については、特願平11−242166号に詳しく説明している。要は、道路区間に含まれるノードの中で、マップマッチングへの貢献度が低いノードを間引くのであり、そのため、隣接するノードから当該ノードへの方位に対して、当該ノードから次のノードへの方位の変化が所定角度以下であり、且つ、前記隣接するノードから当該ノードまでの距離が所定距離未満である場合に、当該ノードは間引かれる。
【0102】
こうした圧縮されたデータを受けて、ノード列復元部12は、次のようにして、等間隔のデータを復元する。ここでは、各間隔が、一定距離A(メートル)から±b(メートル)以上ずれないように復元している。
【0103】
データが間引かれている区間では、Pn-1(Xn-1,Yn-1)とPn(Xn,Yn)との間は直線と見なし、Aメートル間隔でポイントを生成する。この模様を図47に示している。
ここで、Pn-1→Pnベクトルの真北(Y方向)からの方位をθとし、生成するポイントをPnm(m=1,2,3,‥)とすると、
Xnm=Xn-1+m×(Asinθ)
Ynm=Yn-1+m×(Acosθ)
となる。
【0104】
また、図9(c)の基本関数Fで関数近似されている区間では、図48に示すように、Pn-1→Pn間を直線と想定した場合のL’(初回はL'=A−b)進んだ位置Pn1'(Xn1',Yn1')を算出する。このとき、Pn1’の座標は、
Xn1’=Xn-1+1×(L’sinθ)
Yn1’=Yn-1+1×(L’cosθ)
となる。Pn1'に対応する関数F上の点をPn1(=F(Pn1’))とする。Pn-1→PnをX’軸、Pn-1を通りX’軸に直交する軸をY’軸とするX'-Y’座標系の下で、Pn1のX’座標はL’、Pn1のY’座標はF(1×L')である。このX'-Y’座標系を角度(90−θ)だけ回転して、その座標値をX-Y座標系の座標値に変換すると、Pn1(Xn1,Yn1)の座標は、
Xn1 =Xn1’+{F(1×L’)sin(θ−90)}
Yn1 =Yn1’+{F(1×L’)cos(θ−90)}
となる。
【0105】
ここで、Pn-1→Pn1間の距離Ln1が、A+b(メートル)以内の時は、Pn2の算出に進む。Pn-1→Pn1間の距離Ln1が、A+b(メートル)より大きい時は、L’=L’/2として再計算する。
以降は、このバイナリサーチの算出方法を繰り返す。
【0106】
ノード列復元部12のこのような処理により、圧縮されていたデータは等間隔の座標列に変換される。そのため、マップマッチング部13のマッチング処理が容易になる。
【0107】
このノード列復元部12の処理は、ソフトウエアによって実現しても良いし、IC化したハードウエアで実現しても良い。
【0108】
このように、この実施形態の方法では、データ圧縮されたデータ列から、等間隔のデータ列を復元しているため、マッチング処理が容易になり、マップマッチングの精度を高めることができる。
【0109】
(第11の実施形態)
第11の実施形態では、デジタル地図データの道路以外の形状を伝達する位置情報伝達方法について説明する。
【0110】
デジタル地図データには、図34に示すように、施設形状を表すベクトル列(V)や、図35に示すように、県境形状を表すベクトル列(X)、湖沼形状を表すベクトル列(Y)、等高線形状を表すベクトル列(W)などが含まれる。これらの形状は、これまで説明して来た道路形状の表示方法を利用して表示し、また、その事象位置を特定することができる。
【0111】
図36は、家屋形状を表す形状データを示している。形状ベクトル種別には家屋と記述し、詳細情報として、ビル、一般家屋などの識別コードを記述する。次いで、ノード総数と家屋形状を表す各ノード座標とを記述し、事象発生位置を、先頭のノード位置からの相対距離で規定する。
【0112】
図37は、水系形状を表す形状データを示している。形状ベクトル種別には水系と記述し、詳細情報として、湖などの面表現水系、河川などの線表現水系の識別コードを記述する。その他は家屋形状の場合と同じである。
図38は、行政界形状を表す形状データを示している。形状ベクトル種別には行政界と記述し、詳細情報として、都道府県境、市区町村境、町丁目境の識別コードを記述する。
また、図39は、等高線形状を表す形状データを示している。形状ベクトル種別には等高線と記述し、詳細情報として、海抜何メートル等高線の識別コードを記述する。
【0113】
こうした位置情報を伝達することにより、送信側と受信側とで異種のデジタル地図を装備している場合でも、家屋、水系、行政界、等高線などを相互に同定し、事象発生位置を伝え合うことができる。
【0114】
(第12の実施形態)
第12の実施形態では、デジタル地図上の道路以外の位置を伝達する位置情報伝達方法について説明する。
【0115】
図40に示すように、デジタル地図上の黒三角形で示す道路外の位置(再現位置)を伝達する場合、送信側は、道路上に位置する三つの基準点(事象点1、事象点2、事象点3)を設定し、事象点1を含む道路区間(マップマッチングデータ1)の形状データ、事象点1から再現位置までの距離r1及び方位θ1のデータ、事象点2を含む道路区間(マップマッチングデータ2)の形状データ、事象点2から再現位置までの距離r2及び方位θ2のデータ、並びに、事象点3を含む道路区間(マップマッチングデータ3)の形状データ、事象点3から再現位置までの距離r3及び方位θ3のデータを受信側に伝達する。
【0116】
受信側では、図41に示す手順で再現位置を再現する。
ステップ481:マップマッチングデータ1を用いてマップマッチングを実行し、
ステップ482:道路上の事象点1を特定する。
ステップ483:事象点1から距離r1、方位θ1にある地点P1を求める。
同様の手順を繰り返して、マップマッチングデータ2から事象点2を特定し、事象点2から距離r2、方位θ2にある地点P2を求め、マップマッチングデータ3から事象点3を特定し、事象点3から距離r3、方位θ3にある地点P3を求める。
ステップ484:点P1、P2、P3の重心を算出し、
ステップ489:重心位置を再現位置とする。
【0117】
また、3つの事象点は、図42に示すように、一本の道路(マップマッチングデータ)上に設定しても良い。この場合、各々事象点から見た再現位置は、x座標及びy座標の差分データ(Δxn、Δyn)を用いて表すことができる。
【0118】
この位置情報を受信した受信側では、図43に示す手順で再現位置を再現する。
ステップ501:マップマッチングデータを用いてマップマッチングを実行し、
ステップ502:道路上の事象点1を特定し、
ステップ503:事象点1からΔx1、Δy1の地点P1を求める。
【0119】
同様に、ステップ502及びステップ503を繰り返し、事象点2からΔx2、Δy2の地点P2、及び事象点3からΔx3、Δy3の地点P3を求める。
ステップ504:点P1、P2、P3の重心を算出し、
ステップ505:重心位置を再現位置とする。
【0120】
こうして、道路以外の位置を表すことができる。なお、マップマッチングデータとしては、道路以外に、第3の実施形態で説明した施設形状を表すベクトル列や、県境形状を表すベクトル列、湖沼形状を表すベクトル列、等高線形状を表すベクトル列などを用いることもできる。
【0121】
なお、ここでは、三つの基準点から目標位置までの相対情報(距離及び方位の情報)を伝達する場合について示したが、送信側から、二つの基準点、あるいは、一つの基準点からの相対情報しか伝えなかった場合でも、受信側では、その基準点を自己のデジタル地図上で高精度に特定することができるため、その基準点からの相対情報により、目標位置を統計的に求めることが可能である。
【0122】
また、各実施形態では、形状データに含める各ノードの座標データを経度・緯度データの絶対値または相対値で表しているが、各ノードの座標データは、他のパラメータを用いて表しても良い。
【0123】
例えば、図49に示すように、xy座標により(xj-1,yj-1)、(xj,yj)及び(xj+1,yj+1)で表されるノードPj-1、Pj及びPj+1が存在し、直線Pj-1→Pjの距離がLj、直線Pj-1→Pjの絶対方位(北を基準とした時計回り方向の角度)がωj-1、直線Pj→Pj+1の距離がLj+1、直線Pj→Pj+1の絶対方位がωjであるとすると、ノードPjは、前ノードPj-1からの距離Ljと絶対方位ωj-1とを用いて特定することができる。
【0124】
ここで、Lj及びωj-1は、Pj-1及びPjのxy座標値から次式により算出することができる。
Lj =√{(xj−xj-1)2+(yj−yj-1)2}
ωj-1=tan-1{(xj−xj-1)/(yj−yj-1)}
ノードPj+1についても、同様に、前ノードPjからの距離Lj+1と絶対方位ωjとを用いて特定することができる。
【0125】
また、ノードPj+1は、前ノードPjからの距離Lj+1と偏角、つまり、Pj→Pj+1の絶対方位ωjとPj-1→Pjの絶対方位ωj-1との変位差Θj、を用いて特定することもできる。偏角Θjは、Pj-1、Pj及びPj+1の各xy座標値から次式により算出することができる。
Θj =ωj−ωj-1
= tan-1{(xj+1−xj)/(yj+1−yj)}
−tan-1{(xj−xj-1)/(yj−yj-1)}
【0126】
図50は、形状データに含まれるノード列情報を、前ノードからの距離と偏角とを用いて表した送信データを例示している。図50(a)の送信データは、ノードp1とノードp2との間の補間点#1〜#aのデータを含み、この補間点のデータが、前ノードまたは前補間点からの距離と偏角とのデータで構成されている。始端となるノードp1に関しては、位置を表す絶対座標(経度、緯度)と、切片方向絶対方位(p1と補間点#1とを結ぶ直線の絶対方位)とのデータを含んでいる。また、補間点#1のデータは、補間点#1から補間点#2に延びる直線の絶対方位と前記切片方向絶対方位との方位差を表す偏角データと、p1から補間点#1までの距離データとで構成され、補間点#2のデータは、同様に、補間点#2から補間点#3に延びる直線の絶対方位と補間点#1から補間点#2に延びる直線の絶対方位との偏角データと、前補間点#1から補間点#2までの距離データとで構成されている。補間点#3〜#aに関しても同様である。
【0127】
また、図50(b)の送信データは、始端のノードp1を除く各ノードのデータが、前ノードからの距離と偏角とで構成されている。
【0128】
図51は、元地図データの対象道路区間の形状(a)と、それを前ノードからの距離と偏角とで表した座標列(b)とを模式的に示している。なお、図51に示すように、対象道路区間の元地図データから、対象道路区間の形状を、より少ない数で再現できるノードをリサンプルし、リサンプルしたノードを前ノードからの距離と偏角とで表現するようにしても良い。
【0129】
図52は、この送信データを受信した受信側でのマップマチング処理を模式的に示している。このマップマチングでは、自己のデジタル地図上で、まず、形状データの始端ノードp1に対応する候補点を設定する。そのために、始端ノードp1の緯度・経度データ位置から、概ね200m以内にあるn個の近隣道路上にn個の候補点を設定する。
次に、始端ノードp1位置から各候補点P1,iまでの距離Diを算出する。
【0130】
次に、図53に示すように、各道路の現在の候補点Pj,iから、道路に沿って、形状データのpj→pj+1間の距離Ljだけ進んだ点Pj+1,iを求め、Pj-1,i→Pj,iを結ぶ直線とPj,i→Pj+1,iを結ぶ直線とのなす角θj,iと、形状データで表されたpjの相対方位Θjとの差|Δθj,i|を算出し、次式により評価値εj,iを算出する。
εj,i = α×Di+Σ(β×|Δθj,i|)
(Σはj=1からjまで加算)
α:予め決めた係数
β:予め決めた係数
次いで、候補点Pj,iを候補点Pj+1,iに移動する。
【0131】
こうした処理を全ての候補点について繰り返し、また、同様の処理を、形状データに含まれる全てのノードについて実行する。形状データに含まれた全てのノードについての処理が終了すると、評価値εiの最も小さい候補を対象道路として選択する。
【0132】
このマップマッチング処理では、形状データに含まれる「前ノードからの距離Li」を用いて、次の候補点を容易に求めることができ、また、形状データに含まれる「相対方位」を直接用いて、評価値を算出することができる。そのため、受信側でのマップマッチングの処理負担が軽減される。
【0133】
また、本発明の位置情報伝達方法は、送信側及び受信側装置のコンピュータの動作手順をプログラムにより規定して実現することができる。
【0134】
以上、本発明の各種実施形態を説明したが、本発明は前記実施形態において示された事項に限定されず、明細書の記載、並びに周知の技術に基づいて、当業者がその変更・応用することも本発明の予定するところであり、保護を求める範囲に含まれる。
【産業上の利用可能性】
【0135】
以上の説明から明らかなように、本発明のデジタル地図の位置情報伝達方法を用いることにより、デジタル地図上の位置を効率的、且つ、正確に伝達することが可能となる。
【符号の説明】
【0136】
10、20 位置情報送受信装置
11、22 位置情報受信部
12 ノード列復元部
13 マップマッチング部
14 デジタル地図データベース
15 デジタル地図表示部
16 事象入力部
17 位置情報変換部
18、21 位置情報送信部
【特許請求の範囲】
【請求項1】
位置情報送信装置及び位置情報受信装置を含む位置情報伝達システムであって、前記位置情報提供装置及び前記位置情報受信装置はそれぞれデジタル地図を備え、
前記位置情報送信装置は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備え、
前記位置情報受信装置は、
前記道路形状データを受信する手段と、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段と、
を備えたことを特徴とする位置情報伝達システム。
【請求項2】
位置情報送信装置及び位置情報受信装置がそれぞれデジタル地図を備え、前記それぞれのデジタル地図間におけるデジタル地図上の位置情報伝達方法であって、
前記位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行し、
前記位置情報受信装置は、
前記道路形状データを受信するステップと、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、を実行する、
位置情報伝達方法。
【請求項3】
デジタル地図を備えた位置情報受信装置に対し、自己のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信装置であって、
当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備えたことを特徴とする位置情報送信装置。
【請求項4】
デジタル地図を備えた位置情報受信装置に対し、位置情報送信装置のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信方法であって、
当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行する、位置情報送信方法。
【請求項5】
位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信する手段と、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段と、
を備えたことを特徴とする位置情報受信装置。
【請求項6】
位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信するステップと、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、
を備えたことを特徴とする位置情報受信方法。
【請求項7】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、
前記位置情報送信装置は、
第1のデジタル地図の第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、
前記生成した位置情報を位置情報受信装置に送信する送信手段と、を備え、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信手段と、
前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定する手段と、
を備えたことを特徴とするシステム。
【請求項8】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、
前記位置情報送信装置は、
前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、
前記位置情報受信装置は、
前記生成された位置情報を受信するステップと、
前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定するステップと、
を実行する方法。
【請求項9】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、
前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、
前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、
を備えることを特徴とする位置情報送信装置。
【請求項10】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、
前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、
を備えることを特徴とする位置情報送信方法。
【請求項11】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、
前記位置情報送信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、
前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備え、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、
を含むことを特徴とするシステム。
【請求項12】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、
前記位置情報送信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、
を実行する方法。
【請求項13】
第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、当該位置情報送信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、
前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、
を備えたことを特徴とする位置情報送信装置。
【請求項14】
第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、
を備えたことを特徴とする位置情報送信方法。
【請求項15】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける前記位置情報受信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、
を含むことを特徴とする位置情報受信装置。
【請求項16】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける位置情報受信方法は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、
を含むことを特徴とする位置情報受信方法。
【請求項17】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムであって、
前記位置情報送信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段と、を含み、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、
を含むことを特徴とするシステム。
【請求項18】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報伝達方法であって、
前記位置情報送信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを実行し、
前記位置情報受信装置は、
前記生成された位置情報を受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、
を実行する位置情報伝達方法。
【請求項19】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段を含むことを特徴とする位置情報送信装置。
【請求項20】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信方法であって、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを含むことを特徴とする位置情報送信方法。
【請求項21】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報受信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、
を含むことを特徴とする位置情報受信装置。
【請求項22】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報受信方法であって、前記位置情報受信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、
を実行する位置情報受信方法。
【請求項1】
位置情報送信装置及び位置情報受信装置を含む位置情報伝達システムであって、前記位置情報提供装置及び前記位置情報受信装置はそれぞれデジタル地図を備え、
前記位置情報送信装置は、位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備え、
前記位置情報受信装置は、
前記道路形状データを受信する手段と、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段と、
を備えたことを特徴とする位置情報伝達システム。
【請求項2】
位置情報送信装置及び位置情報受信装置がそれぞれデジタル地図を備え、前記それぞれのデジタル地図間におけるデジタル地図上の位置情報伝達方法であって、
前記位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行し、
前記位置情報受信装置は、
前記道路形状データを受信するステップと、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、を実行する、
位置情報伝達方法。
【請求項3】
デジタル地図を備えた位置情報受信装置に対し、自己のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信装置であって、
当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信する手段を備えたことを特徴とする位置情報送信装置。
【請求項4】
デジタル地図を備えた位置情報受信装置に対し、位置情報送信装置のデジタル地図上の道路区間に対応する、前記位置情報受信装置のデジタル地図上の道路区間を特定させるための道路形状データを送信する位置情報送信方法であって、
当該位置情報送信装置は、当該位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加して道路形状データとして送信するステップを実行する、位置情報送信方法。
【請求項5】
位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信する手段と、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定する手段と、
を備えたことを特徴とする位置情報受信装置。
【請求項6】
位置情報送信装置が備えるデジタル地図上の道路区間の形状を示す座標列情報に前記座標列情報に含まれる座標点における道路形状の曲線方向を示す方位情報を付加した道路形状データを受信するステップと、
前記道路形状データを構成する座標列情報の各座標が示す前記方位情報と、前記各座標に対応する自己のデジタル地図上の各候補位置における道路形状の曲線方向を示す方位情報との比較に基づき、前記位置情報送信装置のデジタル地図上の道路区間に対応する、自己のデジタル地図上の道路区間を特定するステップと、
を備えたことを特徴とする位置情報受信方法。
【請求項7】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、
前記位置情報送信装置は、
第1のデジタル地図の第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、
前記生成した位置情報を位置情報受信装置に送信する送信手段と、を備え、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信手段と、
前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定する手段と、
を備えたことを特徴とするシステム。
【請求項8】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、
前記位置情報送信装置は、
前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、
前記位置情報受信装置は、
前記生成された位置情報を受信するステップと、
前記位置情報を用いて前記第1の事象発生位置に対応する前記第2の事象発生位置を特定するステップと、
を実行する方法。
【請求項9】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、
前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成する位置情報生成手段と、
前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、
を備えることを特徴とする位置情報送信装置。
【請求項10】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、
前記第1のデジタル地図の前記第1の道路区間上のノード列の座標データを含むノード列情報と、前記ノード列のうちの1つのノードに対応する前記第1の事象発生位置を示す第1の事象情報とを含む、位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、
を備えることを特徴とする位置情報送信方法。
【請求項11】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムであって、
前記位置情報送信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、
前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、を備え、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、
を含むことを特徴とするシステム。
【請求項12】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定する方法であって、
前記位置情報送信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、を実行し、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、
を実行する方法。
【請求項13】
第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信装置であって、当該位置情報送信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成する手段と、
前記生成した位置情報を前記位置情報受信装置に送信する送信手段と、
を備えたことを特徴とする位置情報送信装置。
【請求項14】
第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するために、前記第1の事象発生位置を前記位置情報受信装置に送信する位置情報送信方法であって、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を生成するステップと、
前記生成した位置情報を前記位置情報受信装置に送信するステップと、
を備えたことを特徴とする位置情報送信方法。
【請求項15】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける前記位置情報受信装置は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定する特定手段と、
を含むことを特徴とする位置情報受信装置。
【請求項16】
位置情報送信装置に格納された第1のデジタル地図上における第1の道路区間上の第1の事象発生位置を、位置情報受信装置に格納された前記第1のデジタル地図とは異なる第2のデジタル地図上で、前記第1の事象発生位置に対応する、第2の道路区間上の第2の事象発生位置を特定するシステムにおける位置情報受信方法は、
前記第1の道路区間上のノード列の座標情報を含むノード列情報と、前記第1の事象発生位置と前記ノード列のうちの1つのノード間の距離を示す距離情報と、前記ノード列のノードの並び順に関して順方向か逆方向かを識別する方向識別フラグを含む、事象発生に関する方向情報とを含む位置情報を受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の事象発生位置に対応する前記第2のデジタル地図上の前記第2の道路区間上の前記第2の事象発生位置を特定し、前記事象発生の方向を決定するステップと、
を含むことを特徴とする位置情報受信方法。
【請求項17】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムであって、
前記位置情報送信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段と、を含み、
前記位置情報受信装置は、
前記生成された位置情報を受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、
を含むことを特徴とするシステム。
【請求項18】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報伝達方法であって、
前記位置情報送信装置は、前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを実行し、
前記位置情報受信装置は、
前記生成された位置情報を受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、
を実行する位置情報伝達方法。
【請求項19】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成する手段を含むことを特徴とする位置情報送信装置。
【請求項20】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報送信方法であって、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を生成するステップを含むことを特徴とする位置情報送信方法。
【請求項21】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける前記位置情報受信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信する受信手段と、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定する手段と、
を含むことを特徴とする位置情報受信装置。
【請求項22】
第1の道路区間を含む第1のデジタル地図が格納されている位置情報送信装置と、第2の道路区間を含む第2のデジタル地図が格納されている位置情報受信装置からなるシステムにおける位置情報受信方法であって、前記位置情報受信装置は、
前記第1の道路区間を示す座標情報を含むノード列情報と、前記第1の道路区間上の前記ノード列のうちのノードの1つから相対的に定義される第1の参照点の座標からの相対座標によって前記第1の道路区間の外側に位置する第1の目標位置を示す相対座標情報と、を含む位置情報を前記位置情報送信装置から受信するステップと、
前記位置情報に基づいて、前記第1のデジタル地図上の前記第1の参照点に対応する前記第2のデジタル地図上の第2の参照点を特定し、前記特定された第2の参照点と前記相対座標情報とを用いて前記第2のデジタル地図上の第2の目標位置を特定するステップと、
を実行する位置情報受信方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
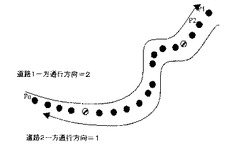
【図27】
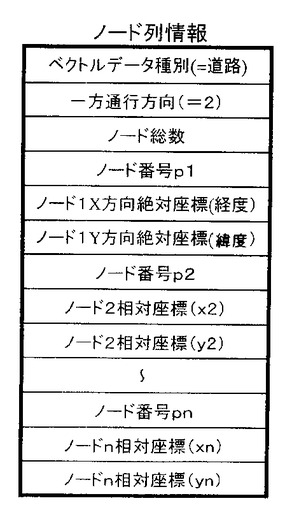
【図28】
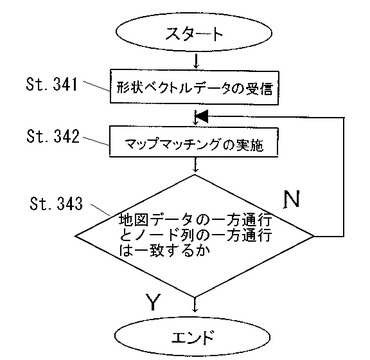
【図29】
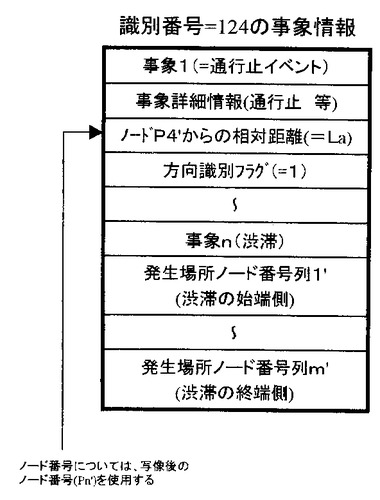
【図30】
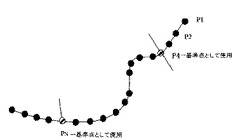
【図31】
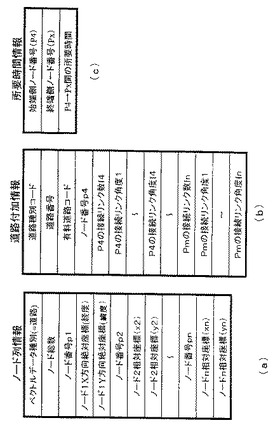
【図32】
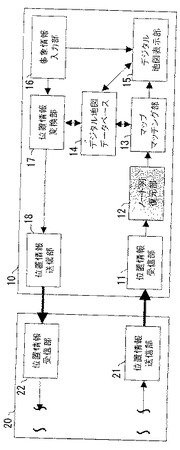
【図33】
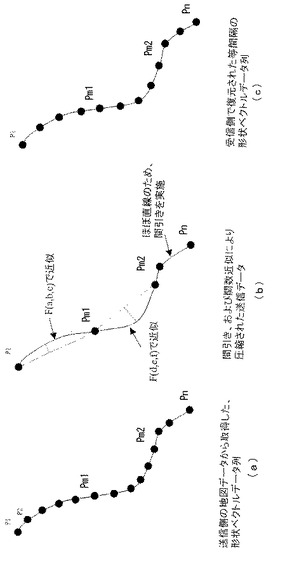
【図34】
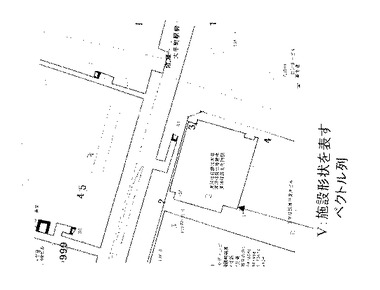
【図35】
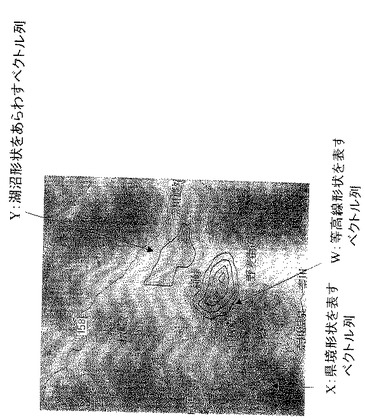
【図36】
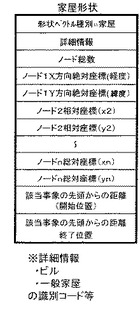
【図37】
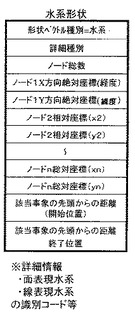
【図38】
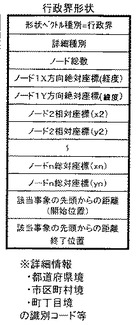
【図39】
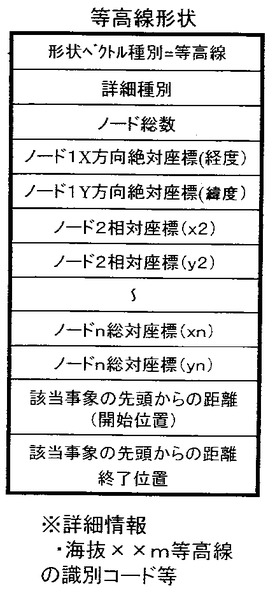
【図40】
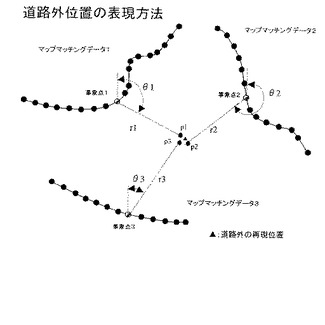
【図41】
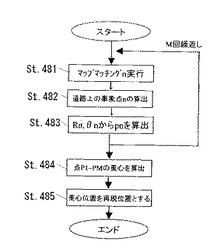
【図42】
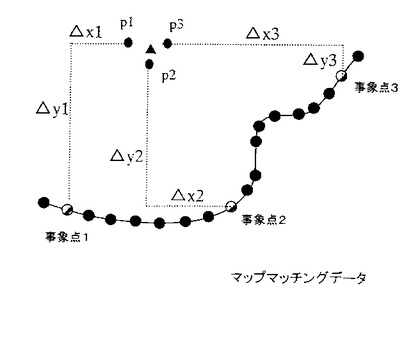
【図43】
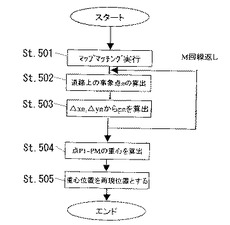
【図44】
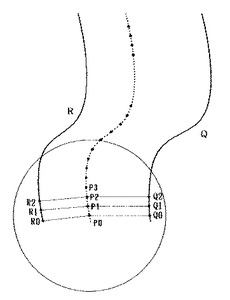
【図45】
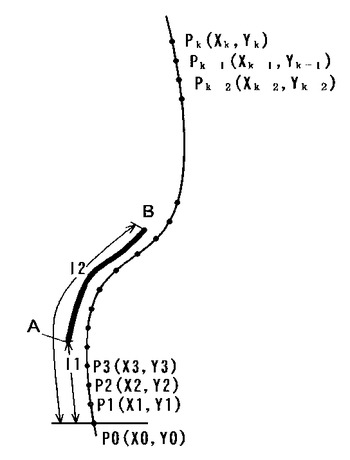
【図46】
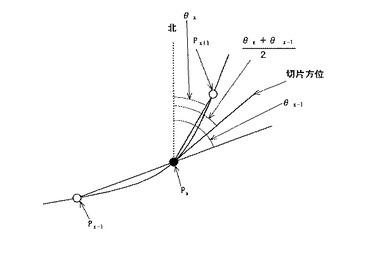
【図47】
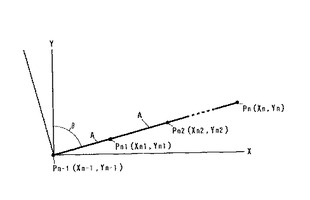
【図48】
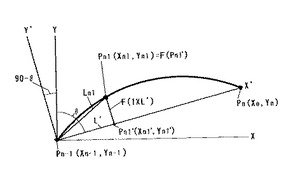
【図49】
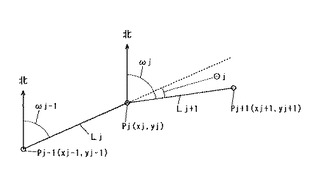
【図50】
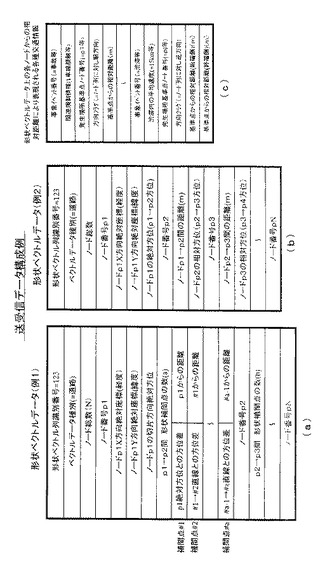
【図51】
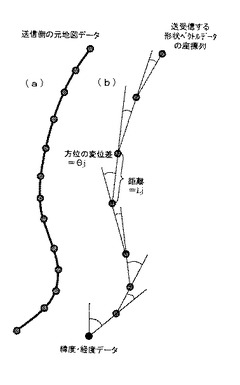
【図52】
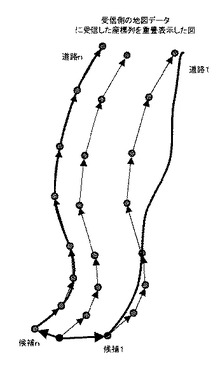
【図53】
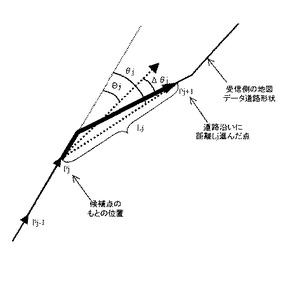
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【公開番号】特開2011−248374(P2011−248374A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2011−156573(P2011−156573)
【出願日】平成23年7月15日(2011.7.15)
【分割の表示】特願2001−220062(P2001−220062)の分割
【原出願日】平成13年7月19日(2001.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成23年7月15日(2011.7.15)
【分割の表示】特願2001−220062(P2001−220062)の分割
【原出願日】平成13年7月19日(2001.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]