
デュアルクラッチ式自動変速機およびその変速制御方法
【課題】要求ギヤ段が成立していないときでも運転者の加速要求を満足させることが可能なデュアルクラッチ式自動変速機およびその変速制御方法を提供する。
【解決手段】デュアルクラッチ式自動変速機1の変速制御装置3は、現在ギヤ段検出部111と、要求ギヤ段演算部112と、アクセル踏込検出部114と、アクセルの踏込みが検出されたときの要求ギヤ段に向かってシフト中である第1または第2シフト機構のシフト進行度を演算するシフト進行度演算部115と、シフト進行度が予め設定されたシフト変更閾値Eより大きい場合は第1または第2シフト機構によって要求ギヤ段Gdを成立させ要求ギヤ段Gdに対応するクラッチを接続して走行し、シフト進行度がシフト変更閾値Eより小さい場合には第1または第2シフト機構によって成立している現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御部116と、を備える。
【解決手段】デュアルクラッチ式自動変速機1の変速制御装置3は、現在ギヤ段検出部111と、要求ギヤ段演算部112と、アクセル踏込検出部114と、アクセルの踏込みが検出されたときの要求ギヤ段に向かってシフト中である第1または第2シフト機構のシフト進行度を演算するシフト進行度演算部115と、シフト進行度が予め設定されたシフト変更閾値Eより大きい場合は第1または第2シフト機構によって要求ギヤ段Gdを成立させ要求ギヤ段Gdに対応するクラッチを接続して走行し、シフト進行度がシフト変更閾値Eより小さい場合には第1または第2シフト機構によって成立している現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御部116と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、2つの入力軸それぞれに原動機の回転駆動力を伝達可能なデュアルクラッチを有するデュアルクラッチ式自動変速機およびその変速制御方法に関する。
【背景技術】
【0002】
近年、シフト変更の際にトルク切れをなくすことができるデュアルクラッチ式自動変速機(特許文献1)が注目されている。このようなデュアルクラッチ式自動変速機は、同心に設けられ偶数段および奇数段のギヤが夫々固定された2つの入力軸と、入力軸と平行に配置され偶数段および奇数段の従動ギヤを支承する第1副軸と、偶数段および奇数段の従動ギヤのうち残りの従動ギヤを支承する第2副軸と、を有している。またエンジンと2つの入力軸との間にはトルク伝達を夫々断接する2つのクラッチを有している。
【0003】
デュアルクラッチ式自動変速機はこのような構成によって、一方の入力軸に連結されるクラッチが接続状態となりエンジントルクを一方の入力軸から所定のギヤ段を介していずれか一方の副軸を回転させ車両を走行させる。このときクラッチが切断状態である他方の入力軸では車両の走行状態、アクセルの操作状態、および車速のプレシフト変速線の通過等から次に変速される所定のギヤ段が制御装置によって予測され、いずれかの副軸に予測された待機ギヤ段が成立し待機している場合がある。このような状態において運転者が加速を欲しアクセルを踏込むと制御装置が運転者の加速要求を満たすことが可能な所定の要求ギヤ段へのシフトを要求する。このとき、要求ギヤ段が待機ギヤ段と一致していれば接続されていた一方の入力軸のクラッチの係合が解除されていくとともに、切断状態であった他方の入力軸のクラッチが係合されていき、やがて他方の入力軸にエンジントルクが完全に伝達され要求ギヤ段によって車両が走行する。これによって短時間で変速動作が完了し変速時にトルク切れをおこしにくい構成となっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−196745号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、要求ギヤ段が待機ギヤ段と一致していないとき、または待機ギヤ段がなく、まったく成立していないときには、まず要求ギヤ段に向かってシフトし要求ギヤ段を成立させなければならない。そしてシフト成立後に要求ギヤ段に対応する他方の入力軸のクラッチを係合して変速しなければならない。このとき要求ギヤ段にシフトするための時間が長すぎると変速時にもたつき感が発生し運転者が満足する加速感を得づらくなる場合がある。
【0006】
本発明は上記課題に鑑みてなされたものであり、要求ギヤ段が成立していないときでも運転者の加速要求を満足させることが可能なデュアルクラッチ式自動変速機およびその変速制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、請求項1に係るデュアルクラッチ式自動変速機の発明は、同心に配置された第1入力軸および第2入力軸と、原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置と、を備え、前記変速制御装置は、現在成立している現在ギヤ段を検出する現在ギヤ段検出部と、運転者のアクセル操作状態および車両の走行状態に基づき前記現在ギヤ段の次に選択すべき要求ギヤ段を演算する要求ギヤ段演算部と、前記運転者のアクセルの踏込みを検出するアクセル踏込検出部と、前記アクセル踏込検出部によって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算部と、前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御部と、を備える。
【0008】
請求項2に係るデュアルクラッチ式自動変速機の発明は、請求項1において、前記シフト進行度演算部における前記進行度の演算は、前記要求ギヤ段にシフト中の前記第1シフト機構または前記第2シフト機構のシフトの区分された段階に基づいて行なう。
【0009】
請求項3に係るデュアルクラッチ式自動変速機の発明は、請求項1または2において、前記変速制御装置は、前記要求ギヤ段へのシフトの開始時点から計時を行なうシフト時間計測部を有し、前記シフト進行度演算部における前記進行度の演算は、前記シフト時間計測部によって計測された前記シフトの開始時点から前記アクセルの踏込みが検出されたときまでの経過時間と前記シフトの開始時点からシフト完了までのシフト所定時間に基づいて行なう。
【0010】
請求項4に係るデュアルクラッチ式自動変速機の発明は、請求項1乃至3のいずれか1項において、前記アクセル踏込検出部は前記運転者が踏込んだ前記アクセルのアクセル踏込み量およびアクセル踏込み速度の少なくとも一方を検出し、前記走行ギヤ段選択制御部は前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方の大きさに応じて前記シフト変更閾値を変更する。
【0011】
請求項5に係るデュアルクラッチ式自動変速機の発明は、請求項1乃至4のいずれか1項において、前記要求ギヤ段にシフトした場合に得られる要求ギヤ段加速力、前記現在ギヤ段の場合に得られる現在ギヤ段加速力、および前記運転者が踏込んだ前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方から求めた前記運転者が要求している運転者要求加速力を夫々演算する加速力演算部を有し、前記走行ギヤ段選択制御部において、演算された前記要求ギヤ段加速力および前記現在ギヤ段加速力のうち前記運転者要求加速力により近い加速力を実現できる前記要求ギヤ段または前記現在ギヤ段が選択されるよう前記シフト変更閾値を変更する。
【0012】
請求項6に係る変速制御方法の発明は、同心に配置された第1入力軸および第2入力軸と、原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置とを備えたデュアルクラッチ式自動変速機の前記変速制御装置の変速制御方法であって、前記変速制御方法は、前記運転者のアクセルの踏込みを検出するアクセル踏込検出ステップと、前記アクセル踏込検出ステップによって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算ステップと、前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御ステップと、を備える。
【発明の効果】
【0013】
請求項1に係るデュアルクラッチ式自動変速機の発明によれば、車両走行中に運転者が加速を欲してアクセルを踏込んだ場合に、アクセルを踏込んだ時点における要求ギヤ段へのシフトの進行度がシフト進行度演算部によって演算される。そして演算された進行度が予め設定されたシフト変更閾値より大きいか否かをシフト進行度演算部によって演算する。シフト進行度がシフト変更閾値より大きい場合は、このままシフトを続行すると短時間で変速が完了することを示している。この場合には、シフトを続行させ要求ギヤ段に速やかにシフトし、要求ギヤ段に対応するクラッチを接続して車両を加速させ力強く走行させる。また、アクセルを踏込んだ時点でのシフト進行度がシフト変更閾値より小さい場合は、変速の完了までに時間がかかることを示している。この場合、要求ギヤ段へのシフトの完了を待っているとトルクの低下が発生してしまう。そこですでに成立されている現在ギヤ段に対応するクラッチを接続し車両を走行させる。これにより、トルクの低下を抑制でき運転者が感じるフィーリングの悪化を防止できる。
【0014】
請求項2に係るデュアルクラッチ式自動変速機の発明によれば、請求項1において、シフト進行度演算部の演算は、要求ギヤ段に向ってシフト中の第1または第2シフト機構が位置する区分された段階(作動状態)に基づいて行なう。このような低コスト、かつ簡易な構成によってシフトの進行度を容易に演算する。
【0015】
請求項3に係るデュアルクラッチ式自動変速機の発明によれば、請求項1または2において、シフト進行度演算部では、シフト時間計測部によって計測されたシフトの開始時点からアクセルの踏込みが検出されたときまでの経過時間とシフトの開始時点からシフト完了までのシフト所定時間に基づいて行なう。このような時間の計測によりシフトの進行度をより高精度に演算できる。
【0016】
請求項4に係るデュアルクラッチ式自動変速機の発明によれば、請求項1乃至3のいずれか1項において、アクセル踏込検出部が検出したアクセル踏込み量およびアクセル踏込み速度の少なくとも一方の大きさに応じてシフト変更閾値を変更する。アクセル踏込み量が大きいとき、或いはアクセル踏込み速度が早いときには、運転者が大きな加速を強く望んでいると判断できる。このため加速力のより大きな要求ギヤ段の選択がされるようにシフト変更閾値を変更する。これにより、若干のもたつき感が発生しても運転者の要求通りに要求ギヤ段によって力強い加速力を得ることができる。
【0017】
請求項5に係るデュアルクラッチ式自動変速機の発明によれば、請求項1乃至4のいずれか1項において、運転者が踏込んだアクセル踏込み量およびアクセル踏込み速度の少なくとも一方から求めた、運転者が要求している運転者要求加速力が演算される。そして別途演算された要求ギヤ段加速力と現在ギヤ段加速力のうち運転者要求加速力により近い加速力を実現するギヤ段が選択されるようシフト変更閾値を変更する。これにより、車両は常に運転者が要求する運転者要求加速力に近い加速力で走行でき、運転者の加速力に対する満足感を満たすことができる。
【0018】
請求項6に係る変速制御方法の発明によれば、請求項1と同様の効果を有する。
【図面の簡単な説明】
【0019】
【図1】本発明に係るデュアルクラッチ式自動変速機を適用可能な車両の一部の構成を示したブロック図である。
【図2】デュアルクラッチ式自動変速機の変速機部分の構造を示すスケルトン図である。
【図3】シフトクラッチの詳細説明図である。
【図4】フォークの駆動機構を示す図である。
【図5】シフトにおけるスリーブとシンクロナイザリングとの関係をスリーブの内歯のチャンファとシンクロナイザリングのチャンファとの関係で示した図である。
【図6】変速線の一例を示す図である。
【図7】本発明に係る変速制御装置のシフト中における車両速度やギヤ段の状態を示した図である。
【図8】シフトの4工程及び変速制御閾値Eを説明する図である。
【図9】第1の実施形態の制御方法のフローチャートである。
【発明を実施するための形態】
【0020】
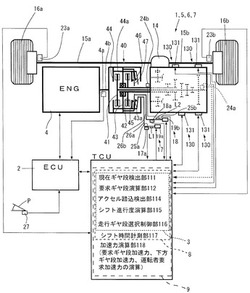
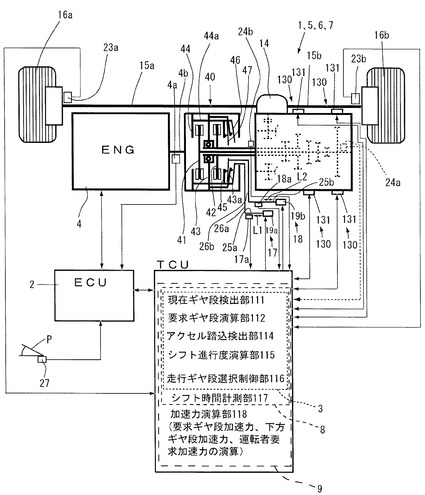
以下、本発明を具体化したデュアルクラッチ式自動変速機の第1の実施形態について、図1〜図9を参照し説明する。図1は、本発明に係るデュアルクラッチ式自動変速機1を適用可能な車両の一部の構成を示したブロック図である。図1に示す車両はFF(フロントエンジンフロントドライブ)タイプの車両であり、原動機の一例でありガソリンの燃焼によって駆動されるエンジン4、本発明に係るデュアルクラッチ式自動変速機1、差動装置14(ディファレンシャル)、駆動軸15a、15b、駆動輪16a、16b(前輪)および図示しない従動輪(後輪)を備えている。
【0021】
図2に示すように、デュアルクラッチ式自動変速機1は、複数のギヤ段が形成され収納されるミッションケース11、およびデュアルクラッチ40(本発明のデュアルクラッチに該当する)を収納するクラッチハウジング12を有している。ミッションケース11およびクラッチハウジング12によってケース10を形成している。
【0022】
また、デュアルクラッチ式自動変速機1は、ミッションケース11に収容される複数のギヤ段の切替え(変速シフト)、およびデュアルクラッチ40が有する後述する第1クラッチディスク41(本発明の第1クラッチを構成する)および第2クラッチディスク42(本発明の第2クラッチを構成する)の切替えを制御する本発明に係る変速制御装置を有している。変速制御装置はエンジン4の作動を制御するECU2(Engine Control Unit)とTCU3(Transmission Control Unit)とから構成されている(図1参照)。
【0023】
図1に示すように、TCU3には、デュアルクラッチ40の切替え制御を行なう第1、第2クラッチアクチュエータ17、18が有する各モータ19a、19b、各モータ19a、19bが出力するストロークを検出するストロークセンサ17a、18a、車速センサ23a、23b、第1および第2入力軸回転数センサ24a、24bが接続されている。またTCU3には、後述する第1〜第4シフトクラッチ101〜104をそれぞれ作動させるフォーク駆動機構130の各モータ131、およびストロークを検出するシフトストロークセンサ136〜139が接続されている(図4参照)。これによってTCU3は各機器とデータの授受を行なったり、各機器に対して制御指令を行なったりする。TCU3はECU2と接続されCAN通信によってECU2と相互に情報を交換しながらデュアルクラッチ式自動変速機1の変速制御を適切に行なう。
【0024】
ECU2には、図1に示すようにエンジン4の出力軸4b近傍に設けられたエンジン4の出力軸回転数センサ4a、エンジン4が有するスロットルボデーのスロットルバルブを開閉するモータ、スロットルバルブの開度を検出するスロットル開度センサ、燃料噴射をおこなうインジェクタ(いずれも図略)、およびアクセルペダルPに設けられたアクセル開度センサ27等が接続されている。これによって各機器とデータの授受を行なったり、各機器に対して制御指令を行なったりする。例えば、取得したTCU3からのデータを含んだ以上の情報に基づきスロットルボデーのモータを駆動しスロットルバルブの開度を制御する、或いは、インジェクタの燃料噴射量を制御する等してエンジン回転数Erpmを制御する。
【0025】
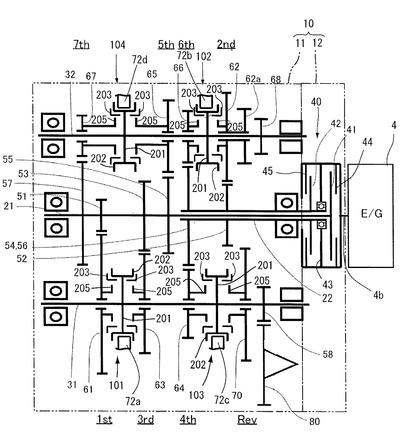
図2に示すように、デュアルクラッチ式自動変速機1は、前進7速のデュアルクラッチ式自動変速機であり、ケース10内の軸線方向に、第1入力軸21、第2入力軸22、第1副軸31、および第2副軸32を備えている。またケース10内には、デュアルクラッチ40、各ギヤ段の駆動ギヤ51〜57、最終減速駆動ギヤ58、68、各ギヤ段の従動ギヤ61〜67、後進ギヤ70、およびリングギヤ80を備えている。以降、第1入力軸21、第2入力軸22、第1副軸31、および第2副軸32と同一軸方向を入力軸方向と称す。
【0026】
第1入力軸21は、軸受によりミッションケース11、およびクラッチハウジング12に対して回転可能に支承されている。第1入力軸21の外周面には、軸受けを支持する部位と複数の外歯スプラインが形成されている。そして、第1入力軸21には、複数の奇数段駆動ギヤである1速駆動ギヤ51および3速駆動ギヤ53が直接形成されている。また複数の奇数段駆動ギヤである5速駆動ギヤ55および7速駆動ギヤ57は、第1入力軸21の外周面に形成された外歯スプラインにスプライン嵌合により圧入され固定されている。また、第1入力軸21の端部外周面には、第1クラッチディスク41の内径部にスプライン係合される連結部(スプライン)が形成されている。これにより第1クラッチディスク41の内径部は連結部に係合され第1入力軸21上を入力軸方向に進退移動可能となっている。
【0027】
第2入力軸22は、中空軸状に形成されており、第1入力軸21の1部の外周に複数の軸受を介して回転可能に支承され、且つ、軸受によりミッションケース11、およびクラッチハウジング12に対して回転可能に支承されている。つまり、第2入力軸22は、第1入力軸21に対して同心に相対回転可能に配置されている。また、第2入力軸22の外周面には、第1入力軸21と同様に、軸受けを支持する部位と複数の外歯歯車が形成されている。第2入力軸22には、複数の偶数段駆動ギヤである2速駆動ギヤ52、4速駆動ギヤ54および6速駆動ギヤ56が形成されている。また、第2入力軸22の端部外周面には、第2クラッチディスク42の内径部にスプライン係合される連結部(スプライン)が形成されている。これにより第2クラッチディスク42の内径部は連結部に係合され第2入力軸22上を入力軸方向に進退移動可能となっている。
【0028】
第1副軸31は、軸受によりミッションケース11およびクラッチハウジング12に対して回転可能に支承され、ミッションケース11内において第1入力軸21に平行に配置されている。また、第1副軸31の外周面には、最終減速駆動ギヤ58が形成されるとともに、軸受けを支持する部位と複数の外歯スプラインが形成されている。
【0029】
第1副軸31の外歯スプラインには、後述する第1シフトクラッチ101(本発明の第1シフト機構に該当する)、および第3シフトクラッチ103(本発明の第2シフト機構に該当する)の各クラッチハブ201がスプライン嵌合により圧入されている。最終減速駆動ギヤ58は、リングギヤ80に噛合している。
【0030】
さらに、第1副軸31には、1速従動ギヤ61、および3速従動ギヤ63、4速従動ギヤ64、および後進ギヤ70を遊転可能に支持する支持部が形成されている。
【0031】
1速従動ギヤ61は第1入力軸21に形成された1速駆動ギヤ51と噛合し、1速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって1速従動ギヤ61が選択されると、第1シフトクラッチ101のスリーブ202が1速従動ギヤ61側に移動して1速従動ギヤ61と第1副軸31とを相対回転不能に接続する。これにより1速従動ギヤ61と第1副軸31とが一体的に回転する状態となる(なお、この状態を変速段が成立した状態という。以降2速段〜7速段、および後進段についても同様である)。このとき、第1シフトクラッチ101の作動の状態は第1シフトクラッチ101用のシフトストロークセンサ136によって監視され第1シフトクラッチ101が現状どのような状態であるかTCU3によって把握されている。以降、第2シフトクラッチ102〜第4シフトクラッチ104も同様である。
【0032】
3速従動ギヤ63は、第1入力軸21に形成された3速駆動ギヤ53と噛合し、3速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって3速従動ギヤ63が選択されると、第1シフトクラッチ101のスリーブ202が3速従動ギヤ63側に移動して3速従動ギヤ63と第1副軸31とを相対回転不能に接続する。これにより3速従動ギヤ63と第1副軸31とが一体的に回転する状態(成立状態)となる。
【0033】
4速従動ギヤ64は、第2入力軸22に形成された4速駆動ギヤ54と噛合し、4速ギヤ段(本発明の偶数変速段に該当する)を形成している。そしてTCU3によって4速従動ギヤ64が選択されると、第3シフトクラッチ103のスリーブ202が4速従動ギヤ64側に移動して4速従動ギヤ64と第1副軸31とを相対回転不能に接続する。これにより4速従動ギヤ64と第1副軸31とが一体的に回転する状態(成立状態)となる。
【0034】
さらに、TCU3によって後進ギヤ70が選択されると、第3シフトクラッチ103のスリーブ202が後進ギヤ70側に移動して後進ギヤ70と第1副軸31とを相対回転不能に接続する。これにより後進ギヤ70と第1副軸31とが一体的に回転する状態(成立状態)となる。なお、後進ギヤ70は、第2副軸32に遊転可能に支持される2速従動ギヤ62と一体的に形成された小径ギヤ62aに常に噛合している。
【0035】
第2副軸32は、軸受によりミッションケース11およびクラッチハウジング12に対して回転可能に軸承され、ミッションケース11内において第1入力軸21に平行に配置されている。また、第2副軸32の外周面には、第1副軸31と同様に、最終減速駆動ギヤ68が形成されるとともに、軸受けを支持する部位と複数の外歯スプラインが形成されている。第2副軸32の外歯スプラインには、第2シフトクラッチ102(本発明の第2シフト機構に該当する)、および第4シフトクラッチ104(本発明の第1シフト機構に該当する)の各クラッチハブ201がスプライン嵌合により圧入されている。最終減速駆動ギヤ68は、差動装置14のリングギヤ80に噛合している。リングギヤ80は、最終減速駆動ギヤ58および最終減速駆動ギヤ68に噛合されることで、第1副軸31および第2副軸32に常時回転連結される。このリングギヤ80は、ケース10に軸支される出力軸(図略)および差動装置14を介して駆動軸15a、15bおよび駆動輪16a、16bに回転連結されている。さらに、第2副軸32には、以上、2速従動ギヤ62、5速従動ギヤ65、6速従動ギヤ66、7速従動ギヤ67、を遊転可能に支持する支持部が形成されている。
【0036】
2速従動ギヤ62は第2入力軸22に形成された2速駆動ギヤ52と噛合し、2速ギヤ段(本発明の偶数変速段に該当する)を形成している。そしてTCU3によって2速従動ギヤ62が選択されると、第2シフトクラッチ102のスリーブ202が2速従動ギヤ62側に移動して2速従動ギヤ62と第2副軸32とを相対回転不能に接続する。これにより2速従動ギヤ62と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0037】
また、5速従動ギヤ65は、第1入力軸21に形成された5速駆動ギヤ55と噛合し、5速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって5速従動ギヤ65が選択されると、第4シフトクラッチ104のスリーブ202が5速従動ギヤ65側に移動して5速従動ギヤ65と第2副軸32とを相対回転不能に接続する。これにより5速従動ギヤ65と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0038】
また、6速従動ギヤ66は、第2入力軸22に形成された6速駆動ギヤ56と噛合し、6速ギヤ段(本発明の偶数変速段に該当する)を形成している。そしてTCU3によって6速従動ギヤ66が選択されると、第2シフトクラッチ102のスリーブ202が6速従動ギヤ66側に移動して6速従動ギヤ66と第2副軸32とを相対回転不能に接続する。これにより6速従動ギヤ66と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0039】
さらに、7速従動ギヤ67は、第1入力軸21に形成される7速駆動ギヤ57と噛合し、7速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって7速従動ギヤ67が選択されると、第4シフトクラッチ104のスリーブ202が7速従動ギヤ67側に移動して7速従動ギヤ67と第2副軸32とを相対回転不能に接続する。これにより7速従動ギヤ67と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0040】
次にデュアルクラッチ40について図1、図2に基づいて説明する。なお、図1、図2のデュアルクラッチ40を比較すると構成が異なる様に見えるが、図2のデュアルクラッチ40は図1のデュアルクラッチ40に対してより簡易的に描いたものであって、図1、図2のデュアルクラッチ40は同じものであることを付け加えておく。
【0041】
デュアルクラッチ40は、第1入力軸21および第2入力軸22に対して同心に設けられている。デュアルクラッチ40は、図2の右側においてクラッチハウジング12に収容され、図1、図2に示すように、第1、第2クラッチディスク41、42、センタプレート43、第1、第2プレッシャプレート44、45、および第1、第2ダイアフラムスプリング46、47(図1参照)を有している。このとき第1クラッチディスク41、センタプレート43、第1プレッシャプレート44および第1ダイアフラムスプリング46によって本発明の第1クラッチを構成している。また第2クラッチディスク42、センタプレート43、および第2プレッシャプレート45および第2ダイアフラムスプリング47によって本発明の第2クラッチを構成している。
【0042】
第1クラッチディスク41はエンジン4の回転駆動力を第1入力軸21に伝達し、第2クラッチディスク42はエンジン4の回転駆動力を2入力軸22に伝達する。前述したように第1クラッチディスク41は、第1入力軸21の連結部に入力軸方向に移動自在にスプライン係合され、第2クラッチディスク42は、第2入力軸22の連結部に入力軸方向に移動自在にスプライン係合されている。
【0043】
センタプレート43は図1、図2に示すように、第1クラッチディスク41と第2クラッチディスク42との間にその面が第1、第2クラッチ41、42の面と平行に対向して配置されている。センタプレート43は第2入力軸22の外周面との間にボールベアリングを介して第2入力軸22と相対回転可能に設けられエンジン4の出力軸4bに連結されて一体回転する。
【0044】
第1および第2プレッシャプレート44、45は図1、図2に示すように、センタプレート43との間でそれぞれ第1、および第2クラッチディスク41、42を挟持し第1、および第2クラッチ41、42と圧着可能に配置されている。
【0045】
第1、第2ダイアフラムスプリング46、47は、円板状に形成されている。図1に示すように第1ダイアフラムスプリング46はセンタプレート43を中心として、入力軸方向に第1プレッシャプレート44と反対側に配置されている。第1ダイアフラムスプリング46の外径部と第1プレッシャプレート44とは円筒状の連結部44aによって連結されている。また第1ダイアフラムスプリング46はセンタプレート43から延在している腕部43aの先端部に支持されている。このような状態において第1ダイアフラムスプリング46の外径部がエンジン4方向に付勢するばね力によって連結部44aをエンジン4側に付勢すると第1プレッシャプレート44が第1クラッチディスク41から離間する。
【0046】
また第1ダイアフラムスプリング46の内径部をエンジン4側に向かって押圧すると第1ダイアフラムスプリング46の外径部のエンジン4方向へのばね力は減衰する。それとともにセンタプレート43から延在している腕部43aの先端部を支点として第1ダイアフラムスプリング46の外径部はエンジン4とは反対方向に移動される。これらによって第1プレッシャプレート44は第1クラッチディスク41方向に移動し、やがてセンタプレート43との間で第1クラッチディスク41を挟持して圧着する。そして完全に係合しエンジン4の回転駆動力が第1入力軸21に伝達される。なお、上記において第1ダイアフラムスプリング46の内径部を押圧する押圧力は内径部を押圧するときのアクチュエータ作動量Lによって制御するが詳細については後述する。
【0047】
また第2ダイアフラムスプリング47は第2プレッシャプレート45の変速機側で且つセンタプレート43の腕部43aのエンジン4側に配置され第2プレッシャプレート45と対向している。第2ダイアフラムスプリング47の外径部は、ばね力がセンタプレート43から延在している腕部43aを変速機側に向かって付勢するよう配置されている。これにより通常時においては第2プレッシャプレート45は第2クラッチディスク42に圧着されないようになっている。そして第2ダイアフラムスプリング47の内径部をエンジン4側に向かって押圧すると腕部43aに接触する第2ダイアフラムスプリング47の外径部を支点として押圧部近傍がエンジン4方向へ移動する。これによって第2プレッシャプレート44がダイアフラムスプリング47に押され第2クラッチディスク42方向に移動し、やがてセンタプレート43との間で第2クラッチディスク42を挟持して圧着する。そして完全に係合しエンジン4の回転駆動力が第2入力軸22に伝達される。なお、第1ダイアフラムスプリング46と同様に第2ダイアフラムスプリング47の内径部を押圧する押圧力は内径部を押圧するときのアクチュエータ作動量Lによって制御する。
【0048】
上述した第1ダイアフラムスプリング46、および第2ダイアフラムスプリング47の内径部の押圧は、図1に示す第1、および第2クラッチアクチェータ17、18によって行なう。第1、および第2クラッチアクチェータ17、18は、それぞれ直流電動モータ19a、19bと、直流電動モータ19a、19bの作動によってボールねじ構造により直線運動するロッド25a、25bと、ロッド25a、25bの直線運動を第1、第2ダイアフラムスプリング46、47の各内径部に伝達する伝達部26a、26bと、ロッド25a、25bの直線運動のアクチュエータ作動量L1、L2を検出するストロークセンサ17a、18aと、を有している。そして、ストロークセンサ17a、18aにより検出されたロッド25a、25bのアクチュエータ作動量L1、L2に関する情報はTCU3に送信される。
【0049】
デュアルクラッチ40がこのように構成されるので、TCU3から変速指令が送出されると、TCU3は第1クラッチアクチュエータ17、または第2クラッチアクチュエータ18を所定のアクチュエータ作動量L1、L2だけ作動させ、エンジン4から入力軸に伝達されるクラッチトルクを制御する。これによりTCU3は第1クラッチディスク41および第2クラッチディスク42のうち、第1入力軸21、および第2入力軸22のうちのエンジン4から切り離される入力軸に対応するクラッチを切離する切離制御を行なう。具体的には直流電動モータ19a、または19bのロッド25a、25bの作動を第1ダイアフラムスプリング46、または第2ダイアフラムスプリング47の内径部が変速機側に向かって移動するよう制御する。
【0050】
またTCU3は、第1クラッチディスク41および第2クラッチディスク42のうち、第1入力軸21および第2入力軸22のうちのエンジン4に接続される入力軸に対応するクラッチを、クラッチトルクが、目標クラッチトルクになるよう制御する。そして、エンジン4の回転数Neが、接続される入力軸の回転数Niと同期すると接続する係合制御を行なう。具体的にはモータ19a、または19bのロッド25a、25bの作動を第1ダイアフラムスプリング46、または第2ダイアフラムスプリング47の内径部がエンジン4側に向かって押圧されるよう制御する。
【0051】
なお、上記クラッチトルクはアクチュエータ作動量と相関関係を有している。この相関関係は事前に取得されTCU3が有するROMに記憶されている。このためTCU3は各クラッチディスクを好適に係合させるために事前に取得された相関関係データから目標となる目標クラッチトルクに対応するアクチュエータ作動量Lを読み取る。そして制御するアクチュエータ作動量L1、L2が該読み取ったアクチュエータ作動量となるよう制御し目標クラッチトルクでの制御を実現する。なお、アクチュエータ作動量Lは常時、ストロークセンサ17a、18aからデータを取得することにより監視している。
【0052】
次に、第1〜第4シフトクラッチ101〜104について図2〜図4に基づいて説明する。図2〜図4に示す各フォーク72a、72b、72c、72dは、第1〜第4シフトクラッチ101〜104が有するスリーブ202の外周部に係合してスリーブ202を軸方向にスライドさせる部材である。各フォーク72a〜72dは、それぞれのフォーク駆動機構130によって駆動される。
【0053】
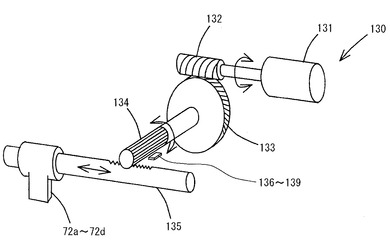
フォーク駆動機構130は、第1〜第4シフトクラッチ101〜104をそれぞれ駆動するために本実施形態においては4つ設けられている。図4に示すように、それぞれのフォーク駆動機構130は、回転軸にウォームギヤ132が形成されたモータ131、ウォームギヤ132に噛合するウォームホイール133、ウォームホイール133に同心に一体的に形成されたピニオンギヤ134、ピニオンギヤ134に噛合するラック軸135を備えている。このラック軸135には、各フォーク72a〜72dがそれぞれ一体に設けられている。つまり、それぞれのフォーク駆動機構130のモータ131を回転することで、そのモータ131に連結されているフォーク72a〜72dが第1副軸31または第2副軸32の軸方向にスライドする。
【0054】
また、図4に示すようにフォーク72a〜72dが軸方向にスライドして移動するストローク量を検出するためのシフトストロークセンサ136〜139がピニオンギヤ134の回転軸近傍にそれぞれ設けられている。シフトストロークセンサ136〜139はTCU3に接続されTCU3の演算部にてウォームホイール133の回転数がストローク量に変換される。なお、シフトストロークセンサ136〜139はモータ131の回転軸近傍に設けてもよい。
【0055】
第1シフトクラッチ101は、第1副軸31の軸方向において1速従動ギヤ61と3速従動ギヤ63との間に配置されている。第2シフトクラッチ102は、第2副軸32の軸方向において2速従動ギヤ62と6速従動ギヤ66との間に配置されている。また第3シフトクラッチ103は、第1副軸31の軸方向において4速従動ギヤ64と後進ギヤ70との間に配置されている。さらに第4シフトクラッチ104は、第2副軸32の軸方向において5速従動ギヤ65と7速従動ギヤ67との間に配置されている。
【0056】
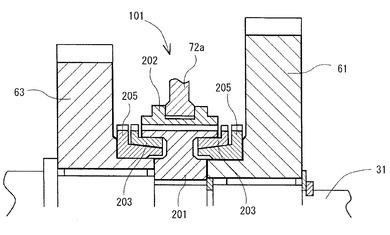
図2、図3に示すように第1シフトクラッチ101は、第1副軸31にスプライン固定されたクラッチハブ201と、1速従動ギヤ61に圧入固定された1速係合部材205と、3速従動ギヤ63に圧入固定された3速係合部材205と、クラッチハブ201と左右の各係合部材205、205の間にそれぞれ介在されたシンクロナイザリング203と、クラッチハブ201の外周に軸線方向移動自在にスプライン係合されたスリーブ202とを有し、各従動ギヤ61、63を交互に第1入力軸21に離脱可能に接続する周知のシンクロメッシュ機構である。
【0057】
第1シフトクラッチ101のスリーブ202は、中立位置では係合部材205、205の何れにも係合されていない。しかしフォーク駆動機構130の作動によってラック軸135が入力軸方向に駆動され、ラック軸135に固定されスリーブ202の外周の環状溝に係合されたフォーク72aによりスリーブ202が1速従動ギヤ61側にシフトされれば、スリーブ202の内歯は1速従動ギヤ61側のシンクロナイザリング203にスプライン係合する。そしてシンクロナイザリング203を1速従動ギヤ61に押しつけながら第1副軸31と1速従動ギヤ61の回転を同期させる。次にスリーブ202の内歯が1速係合部材205の外周の外歯スプラインと係合し、第1副軸31と1速従動ギヤ61を一体的に連結して1速ギヤ段を形成する。またフォーク駆動機構130によりフォーク72aがスリーブ202を3速従動ギヤ63側にシフトさせれば、同様にして第1副軸31と3速従動ギヤ63の回転を同期させた後にこの両者を一体的に連結して3速ギヤ段を成立させる。
【0058】
第2〜第4シフトクラッチ102〜104は、第1シフトクラッチ101と実質的に同一構造で取り付け位置が異なるのみである。第2シフトクラッチ102は2速従動ギヤ62および6速従動ギヤ66を第2副軸32に選択的に連結して相対回転不能とし2速ギヤ段および6速ギヤ段を成立させる。また第3シフトクラッチ103は4速従動ギヤ64および後進ギヤ70を第1副軸31に選択的に連結して相対回転不能とし4速ギヤ段および後進ギヤ段を成立させる。さらに第4シフトクラッチ104は5速従動ギヤ65および7速従動ギヤ67を第2副軸32に選択的に連結して相対回転不能とし5速ギヤ段および7速ギヤ段を成立させる。
【0059】
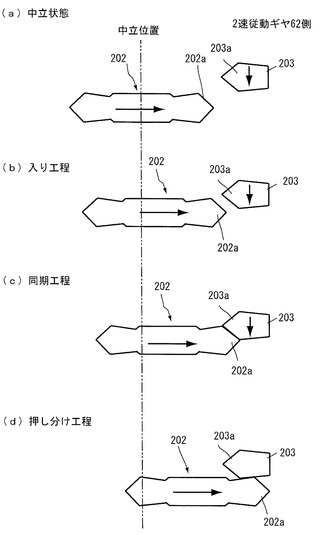
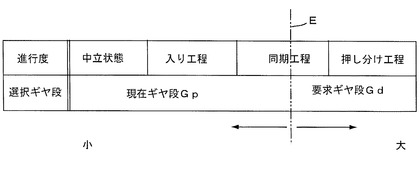
ここで上述したシフトの区分された段階(状態)の遷移をスリーブ202の内径部に形成された内歯のチャンファ部202a、およびシンクロナイザリング203の外周面に形成されたチャンファ部203aの相対的な位置関係に基づいて詳細に説明する。今回の説明においては、代表として第2シフトクラッチ102によって、はじめに中立状態にあるスリーブ202が2速従動ギヤ62側に移動する場合における下記4段階について説明する。なお、第2〜第4シフトクラッチ102〜104によって切替えられる他のギヤ段についても同様の段階を有する。
【0060】
図5(a)は、スリーブ202が2速従動ギヤ62と6速従動ギヤ62の中間にあり、いずれにも係合していない中立段階(状態)である。
次に図5(b)は、スリーブ202が2速従動ギヤ61への進入を開始する入り工程と称される段階である。入り工程は図5(c)で説明する同期工程までの間を指す。入り工程は比較的短時間で終了する工程である。
【0061】
図5(c)は、スリーブ202のチャンファ部202aが2速従動ギヤ62側のシンクロナイザリング203が有するチャンファ部203aに接触し、シンクロナイザリング203を2速係合部材205および2速従動ギヤ62に押しつけてスリーブ202と2速従動ギヤ62との回転を同期させる同期工程と称される段階である。同期開始から同期完了までの同期工程は4段階の中で比較的長い時間を占める段階となっている。
【0062】
そして最後の図5(d)は、スリーブ202のチャンファ部202aが2速従動ギヤ62側のシンクロナイザリング203が有するチャンファ部203aを押し分けて2速従動ギヤ62に接近していく押し分け工程と称される段階である。押し分け工程が開始される時には既にスリーブ202と2速従動ギヤ62との同期は完了している。そのため押し分け工程の開始後にはスリーブ202のチャンファ部202aは速やかに2速従動ギヤ62に到達する。そしてその後、2速従動ギヤ62と完全に係合されて2速従動ギヤ62と第2副軸32とを相対回転不能に接続する。本発明においては、上記中立状態〜押し分け工程の4段階のうちで、運転者が加速のためアクセルを踏込んだ時点ではどの位置にスリーブ202が位置しているかを確認し、位置した工程によってシフト完了までの時間を予測して該予測時間の大きさによって変速するギヤ段を選択するものである。
【0063】
次に本発明に係る変速制御装置を構成するTCU3について説明する。TCU3は前述の通り第1〜第4シフトクラッチ101〜104を作動させるフォーク駆動機構130、およびデュアルクラッチ40が有する第1クラッチディスク41および第2クラッチディスク42の切替えを行なう第1、第2クラッチアクチュエータ17、18を制御する。
【0064】
またTCU3は現在ギヤ段検出部111、要求ギヤ段演算部112、アクセル踏込検出部114、シフト進行度演算部115、および走行ギヤ段選択制御部116を有している。
【0065】
現在ギヤ段検出部111は現在成立している現在ギヤ段Gpを検出する。ここで現在ギヤ段Gpとは、現在、車両走行に適用されているギヤ段を含む、第1〜第4シフトクラッチ101〜104(第1および第2シフト機構)の作動によって成立されているギヤ段のことをいう。現在ギヤ段Gpはフォーク駆動機構130による作動のデータから判定する。具体的にはスリーブ202の入力軸方向への作動をフォーク駆動機構130のピニオンギヤ134軸近傍に設けたシフトストロークセンサ136〜139によって検出する。そして検出されたストローク量から成立しているギヤ段を演算する。
【0066】
要求ギヤ段演算部112は、運転者のアクセル操作状態、車両の走行状態および変速線等に基づき前記現在ギヤ段Gpの次に選択すべき要求ギヤ段Gdを演算する。実際には要求ギヤ段Gdの演算は事前に準備されTCU3のROMに記憶される変速線に基づいて行なわれる。ただし要求ギヤ段はどのように求めてもよい。
【0067】
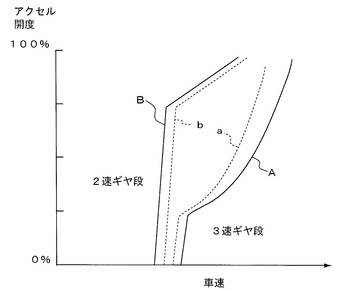
図6に示す変速線は、代表として例えば増速側である2速段から3速段への変速線Aおよび減速側である3速段から2速段への変速線Bを示している。変速線は車両の変速時に利用されるマップデータであり、予め選択したギヤ段選択パラメータ(本実施形態においては車速とアクセルペダル開度)を各軸にとり、一のギヤ段から他のギヤ段への変速の要否を判断するための基準線である。なお、図6に示すように、デュアルクラッチ式自動変速機1においては、変速線Aの若干手前に破線で示したプレ変速線aを有している。プレ変速線aとは所定のアクセル開度と車速との関係が高変速段側に向かってプレ変速線aを越えた場合に、フォーク駆動機構130によって、越えた各プレ変速線に対応するギヤ段(要求ギヤ段Gd)へのシフトが開始されるための変速線である。
【0068】
また同様に減速時における変速線Bの若干手前には破線で示したプレ変速線bを有している。これによりアクセルPをOFFにしたり緩めたりして、車速が減速しアクセル開度と車速との関係がプレ変速線bを低変速段側に向かって越えると、フォーク駆動機構130によって、プレ変速線bに対応するギヤ段(要求ギヤ段Gd)へのシフトが開始される。
【0069】
増速側の変速について詳細に説明する。例えば運転者が第2入力軸22と第2副軸32とによって成立されている2速ギヤ段で走行中にアクセルペダルを踏込み、アクセル開度と車速との関係が3速ギヤ段のプレ変速線aと交差すると、TCU3は、第1副軸31が有する3速従動ギヤ63を選択する。このとき要求ギヤ段Gdは3速段であるとし記憶部に記憶される。そしてTCU3の制御によってフォーク駆動機構130が第1シフトクラッチ103を作動させて3速従動ギヤ63と第1副軸31とを相対回転不能に接続し3速ギヤ段を成立させる。これにより第1副軸31と第1入力軸21とが3速ギヤ段を介して一体回転する。このとき本発明においては3速ギヤ段および走行に適用されている2速ギヤ段が実際に成立しており現在ギヤ段となる。次に、アクセル開度と車速との関係が3速ギヤ段の変速線Aを越えるとTCU3は、第2クラッチアクチュエータ18が、第2クラッチディスク42の係合を解除しエンジン4と第2入力軸22との接続を切離制御する。またそれと同時に第1クラッチアクチュエータ17が、第1クラッチディスク41を目標クラッチトルクで制御しエンジン4の回転と同期させながら係合させる係合制御を行なう。これによりエンジン4の回転トルクが第1入力軸21、および成立された3速ギヤ段を介して第1副軸31に伝達され車両が3速ギヤ段によって走行される。他のギヤ段の変速方法も同様である。
【0070】
次に減速側の変速について説明する。減速時においても増速時と同様に車速が減少し、アクセル開度と車速との関係がプレ変速線と交差するとTCU3がフォーク駆動機構130を作動させ各プレ変速線に対応するギヤ段へのシフトが開始される。このとき交差したプレ変速線に対応するギヤ段を要求ギヤ段Gdとし、TCU3の記憶部に記憶する。例えば運転者が第1入力軸21と第1副軸31とによって成立されている3速ギヤ段で走行中にアクセルペダルをOFFして車速が減少しアクセル開度と車速との関係が2速ギヤ段のプレ変速線bと交差すると、TCU3は、第2副軸32が有する2速従動ギヤ62を選択する。そしてフォーク駆動機構130が第2シフトクラッチ102を作動させて2速従動ギヤ62と第2副軸32とを相対回転不能に接続し2速ギヤ段を成立させる。これにより第2副軸32と第2入力軸22とが2速ギヤ段を介して一体回転する。このとき本発明においては2速ギヤ段および走行に適用されている3速ギヤ段が実際に成立しており現在ギヤ段となる。
【0071】
次に、アクセル開度と車速との関係が2速ギヤ段の変速線Bを越えるとTCU3は、第1クラッチアクチュエータ17によって第1クラッチディスク41の係合を解除しエンジン4と第1入力軸21との接続を切離制御する。また同時に第2クラッチアクチュエータ18が、第2クラッチディスク42を目標クラッチトルクで制御しエンジン4の回転と同期させながら係合させる係合制御を行なう。これによりエンジン4の回転トルクが第2入力軸22、および成立された2速ギヤ段を介して第2副軸32に伝達され車両が2速ギヤ段によって走行される。他のギヤ段の変速方法も同様である。
【0072】
アクセル踏込検出部114は、運転者のアクセルPの踏込みを検出する。このときアクセルの踏込みのONとOFFのみを検出しても良いが、本実施形態においてはアクセルPの踏込み開度、およびアクセルPの踏込み速度も同時に検出する。
【0073】
シフト進行度演算部115は、アクセル踏込検出部114によってアクセルPが踏込まれたことが検出されると、アクセルの踏込みが検出された時点での要求ギヤ段Gpに向かってシフト中である第1〜第4シフトクラッチ101〜104のうちのいずれかのシフトクラッチのシフト進行度を演算する。ここでいうシフト進行度とは、上記で説明した第1〜第4シフトクラッチ101〜104の区分された4段階内での進行度のことをいう。4段階のそれぞれの位置と第1〜第4シフトクラッチ101〜104の各スリーブ202の各ストロークとの関係は事前に取得されTCU3のROMに記憶されている。そこでシフト進行度演算部115ではフォーク駆動機構130が有しているシフトストロークセンサ136〜139が取得するシフトストロークによって各スリーブ202の位置を取得し、4段階のうちどの位置に位置するかを演算する。
【0074】
走行ギヤ段選択制御部116は、演算されたシフト進行度が予め設定された事前の実験によって決定されTCU3の記憶部に記憶されるシフト変更閾値Eより大きい場合には、第1〜第4シフトクラッチ101〜104(第1シフト機構および前記第2シフト機構)のいずれかのシフトクラッチによって要求ギヤ段Gdが成立されるまで待ち、その後要求ギヤ段Gdに対応するクラッチを接続して走行する。つまりシフト進行度がシフト変更閾値Eよりも大きい場合はシフト完了までの残存時間は短く、シフトを続行しても短時間で変速が完了するので、そのまま要求ギヤ段Gdを成立させ、要求ギヤ段Gdによって車両を力強く走行させる。
【0075】
また演算されたシフト進行度がシフト変更閾値Eより小さい場合には、第1〜第4シフトクラッチ101〜104のいずれかのシフトクラッチによって成立している現在ギヤ段に対応するクラッチを接続し走行させる。つまり、演算されたシフト進行度がシフト変更閾値Eより小さい場合には、変速の完了までに時間がかかることがわかる。このため要求ギヤ段Gdへのシフトの完了を待っていると、待っている間にトルクの低下が発生してしまう。そこで走行ギヤ段選択制御部116では、すでに成立している現在ギヤ段Gpでの走行を選択することによりエンジン4の回転駆動力が切断された状態が長引くことにより発生するトルク低下を抑制することができる。
【0076】
なお、上記の場合における、成立している現在ギヤ段とは、現在車両の走行に適用されているギヤ段のことである。つまり、要求ギヤ段Gdに向かっていずれかのシフトクラッチが作動している時には、それまで成立し待機していたいずれかのギヤ段はすでに解除されているためである。
【0077】
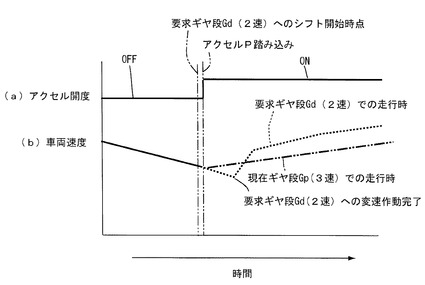
次に、上述の第1の実施形態の構成におけるデュアルクラッチ式自動変速機1の動作、作用について図7、図8および図9のフローチャートに基づいて説明する。本実施形態においてはアクセルOFF状態(図7(a)参照)における減速中から運転者がアクセルPを踏込み、加速を要求した場合について説明する。なお、このとき運転者がアクセルPを踏込んだときには、車両は3速ギヤ段(現在ギヤ段Gp)で走行しているものとする。またアクセルPを踏込む少し前にはアクセル開度と車速との関係が図6のプレ変速線dを3速ギヤ段側から通過したことによって要求ギヤ段Gdとなる2速ギヤ段へのシフトの要求がTCU3から送信されたものとする。これにより運転者がアクセルPを踏込んだときには、第2副軸32が有する2速ギヤ段の2速従動ギヤ62へのシフトが既に開始されている。
【0078】
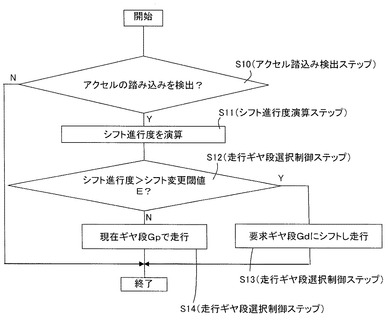
ステップ10(アクセル踏込検出ステップ)では、アクセル踏込み検出部114が運転者のアクセルPの踏込みを検出するとステップS11に進み、踏込みが検出されなければプログラムを終了する。このとき踏込みと判定するための踏込み量の閾値は実験等によって任意に設定される。またこのときアクセル踏込み検出部114では、同時にアクセルPの踏込み速度および踏込み量が取得され所定の記憶部に記憶される。
【0079】
ステップS11(シフト進行度演算ステップ)では、運転者がアクセルPを踏込んだ時点における第1〜第4シフトクラッチ101〜104のうち要求ギヤ段Gdに対応するいずれかのシフトクラッチによる要求ギヤ段Gdへのシフト進行度がシフト進行度演算部115によって演算される。本実施形態においては、図7に示すように運転者がアクセルを踏込んだ時点の少し前に、要求ギヤ段Gdである2速ギヤ段の2速従動ギヤ62へのシフトが第2シフトクラッチ102の作動によって開始されている。これに伴い現在ギヤ段Gpとして成立し待機していた4速ギヤ段の4速従動ギヤ64の成立は2速従動ギヤ62へのシフトの開始前に第3シフトクラッチ103の作動によって解除され中立状態となっている。
【0080】
このとき検出される要求ギヤ段Gdである2速ギヤ段の2速従動ギヤ62へのシフト進行度は前述したようにスリーブ202が、中立状態、入り工程、同期工程、押し分け工程の4段階のうちどこの段階に位置するかを検出するものである。シフト進行度はシフトストロークセンサ136〜139が取得するシフトストロークに基づきシフト進行度演算部115が第2シフトクラッチ102のスリーブ202の位置を演算し求める。このとき4段階のうちどの段階に位置しているかのみを演算するだけでもよい。これによっても大まかなシフト完了までの残存時間は推定できる。しかし本実施形態においては、4段階のそれぞれのなかでどの位置までスリーブ202の作動が進行しているかをさらに演算している。具体的には同期工程は比較的時間のかかる工程であるので、例えば同期工程の中で、どこに位置する(例えば同期開始から70%経過した位置等)か、を判定する。これによりシフト完了までの予測がより精度良く行なわれる。
【0081】
ステップS12(走行ギヤ段選択制御ステップ)では、走行ギヤ段選択制御部116によってステップS11で演算された2速ギヤ段(要求ギヤ段Gd)の2速従動ギヤ62へのシフト進行度と予め設定されたシフト変更閾値Eとが比較される。ここでは例えばシフト変更閾値Eを同期開始から60%経過した位置とする(図8参照)。そしてシフト進行度がシフト変更閾値Eよりも大きい場合(たとえば前述のように同期開始から70%経過した位置であった場合)はステップS13に移動し、2速従動ギヤ62に対応する第2シフトクラッチ102によって2速ギヤ段(要求ギヤ段Gd)を成立させる。そして2速ギヤ段(要求ギヤ段Gd)の成立後に第1クラッチ41を切離制御するとともに、2速ギヤ段(要求ギヤ段Gd)に対応する第2クラッチ42を係合制御して接続し、エンジン4と第2入力軸22とを連結して車両を力強く加速させる(図7(b)参照)。そしてこの後、プログラムを終了する。なお、ここで更閾値Eを同期開始から60%経過した位置としたのはあくまで一例を示したものに過ぎずどのように設定してもよい。
【0082】
またステップS12で、演算された2速ギヤ段(要求ギヤ段Gd)のシフト進行度がシフト変更閾値Eより小さい場合には、変速の完了までに時間がかかると予測できるのでステップS14に移動する。そして車両を走行させていた現在ギヤ段Gpである3速ギヤ段に対応する第1クラッチ41を引き続き接続し車両を走行させる。これによりエンジン4の回転駆動力が切断されることがなく大幅なトルク低下の発生を抑制できる(図7(b)参照)。
【0083】
上述の説明から明らかな様に、第1の実施形態に係るデュアルクラッチ式自動変速機1においては、車両走行中に運転者が加速のためアクセルPを踏込んだ場合に、アクセルPを踏込んだ時点における要求ギヤ段Gdへのシフトの進行度がシフト進行度演算部115によって演算される。そして演算された進行度が予め設定されたシフト変更閾値Eより大きいか否かを演算する。シフト進行度がシフト変更閾値Eより大きい場合には、このままシフトを続行すると短時間で変速が完了する。この場合は、シフトを続行させ要求ギヤ段Gdにできるだけ速やかにシフトし、シフト後、要求ギヤ段Gdに対応するクラッチを接続し車両を力強く加速させて走行させる。また、アクセルを踏込んだ時点でのシフト進行度がシフト変更閾値Eより小さい場合には、変速の完了までに時間がかかる。この場合、要求ギヤ段Gdへのシフトの完了を待っているとトルクの低下が発生してしまう。そこですでに成立されている現在ギヤ段に対応するクラッチを引き続き接続し車両を走行させる。これにより、トルクの低下を抑制でき運転者が感じるフィーリングの悪化を防止できる。
【0084】
また第1の実施形態に係るデュアルクラッチ式自動変速機1においては、シフト進行度演算部115の演算は、要求ギヤ段Gdに向ってシフト中の第1シフト機構(第1、第4シフトクラッチ101、104)または第2シフト機構(第2、第3シフトクラッチ102、103)が位置する区分された4つの段階(中立状態〜押し分け工程)に基づいて行なう。このような低コスト、かつ簡易な構成によってシフトの進行度を容易に演算できる。
【0085】
次に第2の実施形態のデュアルクラッチ式自動変速機5について説明する(図1参照)。第2の実施形態は第1の実施形態に対して変速制御装置を構成するTCU8がシフト時間計測部117を有していることのみ異なる。よって同様の部分については説明を省略し、異なる部分についてのみ説明する。また同様の部品や部分については同じ符号を付して説明する。
【0086】
シフト時間計測部117は要求ギヤ段Gdへのシフトの開始時点(図7参照)から計時を行なう。第2の実施形態においてシフト進行度演算部115における進行度の演算は、シフトの開始時点から運転者によってアクセルが踏込まれた時点までの経過時間をシフト時間計測部117によって計測する。シフトの開始時点はフォーク駆動機構130が有しているシフトストロークセンサ136〜139のデータから検出すればよい。そして予めTCU8が事前に有しているシフトの開始からシフト完了までのシフト所定時間から前記経過時間を減算して完了までの残存時間を演算する。そして演算した残存時間から進行度を求め、進行度が予め設定されたシフト変更閾値Eより大きいか否かを演算する。そしてこれ以降の判定方法は第1の実施形態と同様である。このような時間の計測によりシフトの進行度をより高精度に演算できる。
【0087】
次に第3の実施形態のデュアルクラッチ式自動変速機6について説明する(図1参照)。第3の実施形態は第1の実施形態に対して運転者が踏込んだアクセルPのアクセル踏込み量およびアクセル踏込み速度の少なくとも一方を検出し該アクセル踏込み量およびアクセル踏込み速度に応じてシフト変更閾値Eの値を変更する点のみ異なる。よって同様の部分については説明を省略し、異なる部分についてのみ説明する。また同様の部品や部分については同じ符号を付して説明する。
【0088】
アクセルPのアクセル踏込み量(開度)及びアクセル踏込み速度についてはアクセル踏込検出部114が検出したデータを利用する。アクセル踏込み量(開度)およびアクセル踏込み速度の少なくとも一方が大きいときには運転者が大きな加速を強く望んでいると判断できる。そこで加速力のより大きな要求ギヤ段Gdの選択がし易いようにシフト変更閾値Eをシフト完了までの予測時間が長くなる方、つまりシフト進行度が小さい方(図8においては左方)へずらし変更する。このとき、変更する量については、アクセル踏込み量およびアクセル踏込み速度に応じて決定するが、運転者の感覚と合致するよう事前に実験により評価し決定されることが好ましい。これによって要求ギヤ段Gdの選択の可能性が高くなり、多少のもたつき感が発生しても運転者の要求通りに要求ギヤ段Gdによって力強い加速力を得ることができる。なお、アクセル踏込み量(開度)およびアクセル踏込み速度の少なくとも一方が小さいときには、上記と逆方向にシフト変更閾値Eをずらせばよい。
【0089】
次に第4の実施形態のデュアルクラッチ式自動変速機7について説明する(図1参照)。第4の実施形態は第1乃至第3の実施形態に対してTCU9(変速制御装置)が加速力演算部118を有している。よって同様の部分については説明を省略し、異なる部分についてのみ説明する。また同様の部品や部分については同じ符号を付して説明する。
【0090】
加速力演算部118は要求ギヤ段加速力、現在ギヤ段加速力、および運転者要求加速力を夫々演算する。要求ギヤ段加速力は要求ギヤ段Gdにシフトした場合に得られる加速力である。現在ギヤ段加速力は現在ギヤ段Gpで走行した場合に得られる加速力である。運転者要求加速力は運転者が踏込んだアクセル踏込み量およびアクセル踏込み速度の少なくとも一方から求めた運転者が要求している加速力である。
【0091】
そして、演算された要求ギヤ段加速力および現在ギヤ段加速力のうち運転者要求加速力により近い加速力を実現することができる要求ギヤ段Gdまたは現在ギヤ段Gpのいずれかが選択できるよう走行ギヤ段選択制御部116において、シフト変更閾値Eを変更する。要求ギヤ段Gdを選択し易くするためには図8においてシフト変更閾値Eを左方にずらせばよい。また現在ギヤ段Gpを選択し易くするためには図8においてシフト変更閾値Eを右方にずらせばよい。このとき、変更する量については、運転者の感覚と合致するよう事前に実験により評価し決定されることが好ましい。これにより、車両は常に運転者が要求する運転者要求加速力に近い加速力で走行でき、運転者の加速力に対する満足感を満たすことができる。
【0092】
なお、本実施形態においては、第1入力軸21に、奇数段の駆動ギヤ51、53、55および57を固定して設け、第2入力軸22に、偶数段の駆動ギヤ52、54、および56を固定して設けた。そして第1副軸31および第2副軸32に、第1入力軸21の奇数段駆動ギヤと噛合して奇数変速段を成立させる従動ギヤ61、63、65、67と、第2入力軸22の偶数段駆動ギヤと噛合して偶数変速段を成立させる従動ギヤ62、64、66とを遊転可能に設けた。しかし、この態様に限らず第1入力軸21および第2入力軸22に、それぞれ駆動ギヤ51、53、55、57と駆動ギヤ52、54、56とを遊転可能に設けてもよい。そしてこのときには第1副軸31、および第2副軸32に1速〜7速従動ギヤ61〜67を固定して設けてやればよい。
【0093】
また、特開2011−144872公報の図1に開示されるデュアルクラッチ式自動変速機(FR用)のように7速駆動ギヤ26aのみを第1入力軸15に遊転可能に設け、7速駆動ギヤ26aに噛合する7速従動ギヤ26bを第2副軸18に固定して設けてもよい。さらに公報の図1に示すように切替えクラッチ30Dが紙面右方に移動することによって第1入力軸15と出力軸19とを直結するよう構成してもよい。このようなFR用デュアルクラッチ式自動変速機においても同様の効果が得られる。
【0094】
また、本実施形態においては、ラック軸135を4本設け、それぞれのラック軸135に対して設けたフォーク72a〜72dを各々作動させて各ギヤ段の切り替えを行なった。しかしこれに限らずセレクト用モータを設け、セレクト用モータの駆動によりフォークシャフトを選択し、選択したフォークシャフトをシフト用モータによってスライドさせて各ギヤ段の切り替えを行なってもよい。
【0095】
また、本実施形態に係るデュアルクラッチ40を構成する第1、第2クラッチディスク41、42、センタプレート43、および第1、第2プレッシャプレート44、45の各配置については、本実施形態において説明した態様に限らず、どのように配置して構成してもよい。
【0096】
また、本実施形態においては、本発明に係るデュアルクラッチ式自動変速機として前進7速の変速段を有するデュアルクラッチ式自動変速機にて説明した。しかし、この態様に限らずデュアルクラッチ式自動変速機は7速を越える前進変速段、または6速以下の前進変速段を有するものでもよい。これによっても同様の効果が得られる。
【0097】
さらに、デュアルクラッチ式自動変速機を、自動車に適用するのではなく、自動二輪車等の他の自動変速機に適用してもよい。
【符号の説明】
【0098】
1、5、6、7・・・デュアルクラッチ式自動変速機、2・・・変速制御装置(ECU)、 3、8、9・・・変速制御装置(TCU)、4・・・エンジン、4a・・・回転数センサ、10・・・ケース、11・・・ミッションケース、12・・・クラッチハウジング、17・・・第1クラッチアクチュエータ、18・・・第2クラッチアクチュエータ、21・・・第1入力軸、22・・・第2入力軸、23a、23b・・・車速センサ、31・・・第1副軸、32・・・第2副軸、40・・・デュアルクラッチ、41・・・第1クラッチディスク、42・・・第2クラッチディスク、43・・・センタプレート、44・・・第1プレッシャプレート、45・・・第2プレッシャプレート、51〜57・・・ギヤ段の駆動ギヤ、58、68・・・最終減速駆動ギヤ、61〜67・・・ギヤ段の従動ギヤ、62a・・・小径ギヤ、70・・・後進ギヤ、72a〜72d・・・フォーク、135・・・ラック軸、101、104・・・第1シフト機構(第1、第4シフトクラッチ)、102、103・・・第1シフト機構(第2、第3シフトクラッチ)、111・・・現在ギヤ段検出部、112・・・要求ギヤ段演算部、114・・・アクセル踏込み検出部、115・・・シフト進行度演算部、116・・・走行ギヤ段選択制御部、117・・・シフト時間計測部、118・・・加速力演算部、130・・・フォーク駆動機構、201・・・クラッチハブ、202・・・スリーブ、203・・・シンクロナイザリング。
【技術分野】
【0001】
本発明は、2つの入力軸それぞれに原動機の回転駆動力を伝達可能なデュアルクラッチを有するデュアルクラッチ式自動変速機およびその変速制御方法に関する。
【背景技術】
【0002】
近年、シフト変更の際にトルク切れをなくすことができるデュアルクラッチ式自動変速機(特許文献1)が注目されている。このようなデュアルクラッチ式自動変速機は、同心に設けられ偶数段および奇数段のギヤが夫々固定された2つの入力軸と、入力軸と平行に配置され偶数段および奇数段の従動ギヤを支承する第1副軸と、偶数段および奇数段の従動ギヤのうち残りの従動ギヤを支承する第2副軸と、を有している。またエンジンと2つの入力軸との間にはトルク伝達を夫々断接する2つのクラッチを有している。
【0003】
デュアルクラッチ式自動変速機はこのような構成によって、一方の入力軸に連結されるクラッチが接続状態となりエンジントルクを一方の入力軸から所定のギヤ段を介していずれか一方の副軸を回転させ車両を走行させる。このときクラッチが切断状態である他方の入力軸では車両の走行状態、アクセルの操作状態、および車速のプレシフト変速線の通過等から次に変速される所定のギヤ段が制御装置によって予測され、いずれかの副軸に予測された待機ギヤ段が成立し待機している場合がある。このような状態において運転者が加速を欲しアクセルを踏込むと制御装置が運転者の加速要求を満たすことが可能な所定の要求ギヤ段へのシフトを要求する。このとき、要求ギヤ段が待機ギヤ段と一致していれば接続されていた一方の入力軸のクラッチの係合が解除されていくとともに、切断状態であった他方の入力軸のクラッチが係合されていき、やがて他方の入力軸にエンジントルクが完全に伝達され要求ギヤ段によって車両が走行する。これによって短時間で変速動作が完了し変速時にトルク切れをおこしにくい構成となっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−196745号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、要求ギヤ段が待機ギヤ段と一致していないとき、または待機ギヤ段がなく、まったく成立していないときには、まず要求ギヤ段に向かってシフトし要求ギヤ段を成立させなければならない。そしてシフト成立後に要求ギヤ段に対応する他方の入力軸のクラッチを係合して変速しなければならない。このとき要求ギヤ段にシフトするための時間が長すぎると変速時にもたつき感が発生し運転者が満足する加速感を得づらくなる場合がある。
【0006】
本発明は上記課題に鑑みてなされたものであり、要求ギヤ段が成立していないときでも運転者の加速要求を満足させることが可能なデュアルクラッチ式自動変速機およびその変速制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、請求項1に係るデュアルクラッチ式自動変速機の発明は、同心に配置された第1入力軸および第2入力軸と、原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置と、を備え、前記変速制御装置は、現在成立している現在ギヤ段を検出する現在ギヤ段検出部と、運転者のアクセル操作状態および車両の走行状態に基づき前記現在ギヤ段の次に選択すべき要求ギヤ段を演算する要求ギヤ段演算部と、前記運転者のアクセルの踏込みを検出するアクセル踏込検出部と、前記アクセル踏込検出部によって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算部と、前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御部と、を備える。
【0008】
請求項2に係るデュアルクラッチ式自動変速機の発明は、請求項1において、前記シフト進行度演算部における前記進行度の演算は、前記要求ギヤ段にシフト中の前記第1シフト機構または前記第2シフト機構のシフトの区分された段階に基づいて行なう。
【0009】
請求項3に係るデュアルクラッチ式自動変速機の発明は、請求項1または2において、前記変速制御装置は、前記要求ギヤ段へのシフトの開始時点から計時を行なうシフト時間計測部を有し、前記シフト進行度演算部における前記進行度の演算は、前記シフト時間計測部によって計測された前記シフトの開始時点から前記アクセルの踏込みが検出されたときまでの経過時間と前記シフトの開始時点からシフト完了までのシフト所定時間に基づいて行なう。
【0010】
請求項4に係るデュアルクラッチ式自動変速機の発明は、請求項1乃至3のいずれか1項において、前記アクセル踏込検出部は前記運転者が踏込んだ前記アクセルのアクセル踏込み量およびアクセル踏込み速度の少なくとも一方を検出し、前記走行ギヤ段選択制御部は前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方の大きさに応じて前記シフト変更閾値を変更する。
【0011】
請求項5に係るデュアルクラッチ式自動変速機の発明は、請求項1乃至4のいずれか1項において、前記要求ギヤ段にシフトした場合に得られる要求ギヤ段加速力、前記現在ギヤ段の場合に得られる現在ギヤ段加速力、および前記運転者が踏込んだ前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方から求めた前記運転者が要求している運転者要求加速力を夫々演算する加速力演算部を有し、前記走行ギヤ段選択制御部において、演算された前記要求ギヤ段加速力および前記現在ギヤ段加速力のうち前記運転者要求加速力により近い加速力を実現できる前記要求ギヤ段または前記現在ギヤ段が選択されるよう前記シフト変更閾値を変更する。
【0012】
請求項6に係る変速制御方法の発明は、同心に配置された第1入力軸および第2入力軸と、原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置とを備えたデュアルクラッチ式自動変速機の前記変速制御装置の変速制御方法であって、前記変速制御方法は、前記運転者のアクセルの踏込みを検出するアクセル踏込検出ステップと、前記アクセル踏込検出ステップによって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算ステップと、前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御ステップと、を備える。
【発明の効果】
【0013】
請求項1に係るデュアルクラッチ式自動変速機の発明によれば、車両走行中に運転者が加速を欲してアクセルを踏込んだ場合に、アクセルを踏込んだ時点における要求ギヤ段へのシフトの進行度がシフト進行度演算部によって演算される。そして演算された進行度が予め設定されたシフト変更閾値より大きいか否かをシフト進行度演算部によって演算する。シフト進行度がシフト変更閾値より大きい場合は、このままシフトを続行すると短時間で変速が完了することを示している。この場合には、シフトを続行させ要求ギヤ段に速やかにシフトし、要求ギヤ段に対応するクラッチを接続して車両を加速させ力強く走行させる。また、アクセルを踏込んだ時点でのシフト進行度がシフト変更閾値より小さい場合は、変速の完了までに時間がかかることを示している。この場合、要求ギヤ段へのシフトの完了を待っているとトルクの低下が発生してしまう。そこですでに成立されている現在ギヤ段に対応するクラッチを接続し車両を走行させる。これにより、トルクの低下を抑制でき運転者が感じるフィーリングの悪化を防止できる。
【0014】
請求項2に係るデュアルクラッチ式自動変速機の発明によれば、請求項1において、シフト進行度演算部の演算は、要求ギヤ段に向ってシフト中の第1または第2シフト機構が位置する区分された段階(作動状態)に基づいて行なう。このような低コスト、かつ簡易な構成によってシフトの進行度を容易に演算する。
【0015】
請求項3に係るデュアルクラッチ式自動変速機の発明によれば、請求項1または2において、シフト進行度演算部では、シフト時間計測部によって計測されたシフトの開始時点からアクセルの踏込みが検出されたときまでの経過時間とシフトの開始時点からシフト完了までのシフト所定時間に基づいて行なう。このような時間の計測によりシフトの進行度をより高精度に演算できる。
【0016】
請求項4に係るデュアルクラッチ式自動変速機の発明によれば、請求項1乃至3のいずれか1項において、アクセル踏込検出部が検出したアクセル踏込み量およびアクセル踏込み速度の少なくとも一方の大きさに応じてシフト変更閾値を変更する。アクセル踏込み量が大きいとき、或いはアクセル踏込み速度が早いときには、運転者が大きな加速を強く望んでいると判断できる。このため加速力のより大きな要求ギヤ段の選択がされるようにシフト変更閾値を変更する。これにより、若干のもたつき感が発生しても運転者の要求通りに要求ギヤ段によって力強い加速力を得ることができる。
【0017】
請求項5に係るデュアルクラッチ式自動変速機の発明によれば、請求項1乃至4のいずれか1項において、運転者が踏込んだアクセル踏込み量およびアクセル踏込み速度の少なくとも一方から求めた、運転者が要求している運転者要求加速力が演算される。そして別途演算された要求ギヤ段加速力と現在ギヤ段加速力のうち運転者要求加速力により近い加速力を実現するギヤ段が選択されるようシフト変更閾値を変更する。これにより、車両は常に運転者が要求する運転者要求加速力に近い加速力で走行でき、運転者の加速力に対する満足感を満たすことができる。
【0018】
請求項6に係る変速制御方法の発明によれば、請求項1と同様の効果を有する。
【図面の簡単な説明】
【0019】
【図1】本発明に係るデュアルクラッチ式自動変速機を適用可能な車両の一部の構成を示したブロック図である。
【図2】デュアルクラッチ式自動変速機の変速機部分の構造を示すスケルトン図である。
【図3】シフトクラッチの詳細説明図である。
【図4】フォークの駆動機構を示す図である。
【図5】シフトにおけるスリーブとシンクロナイザリングとの関係をスリーブの内歯のチャンファとシンクロナイザリングのチャンファとの関係で示した図である。
【図6】変速線の一例を示す図である。
【図7】本発明に係る変速制御装置のシフト中における車両速度やギヤ段の状態を示した図である。
【図8】シフトの4工程及び変速制御閾値Eを説明する図である。
【図9】第1の実施形態の制御方法のフローチャートである。
【発明を実施するための形態】
【0020】
以下、本発明を具体化したデュアルクラッチ式自動変速機の第1の実施形態について、図1〜図9を参照し説明する。図1は、本発明に係るデュアルクラッチ式自動変速機1を適用可能な車両の一部の構成を示したブロック図である。図1に示す車両はFF(フロントエンジンフロントドライブ)タイプの車両であり、原動機の一例でありガソリンの燃焼によって駆動されるエンジン4、本発明に係るデュアルクラッチ式自動変速機1、差動装置14(ディファレンシャル)、駆動軸15a、15b、駆動輪16a、16b(前輪)および図示しない従動輪(後輪)を備えている。
【0021】
図2に示すように、デュアルクラッチ式自動変速機1は、複数のギヤ段が形成され収納されるミッションケース11、およびデュアルクラッチ40(本発明のデュアルクラッチに該当する)を収納するクラッチハウジング12を有している。ミッションケース11およびクラッチハウジング12によってケース10を形成している。
【0022】
また、デュアルクラッチ式自動変速機1は、ミッションケース11に収容される複数のギヤ段の切替え(変速シフト)、およびデュアルクラッチ40が有する後述する第1クラッチディスク41(本発明の第1クラッチを構成する)および第2クラッチディスク42(本発明の第2クラッチを構成する)の切替えを制御する本発明に係る変速制御装置を有している。変速制御装置はエンジン4の作動を制御するECU2(Engine Control Unit)とTCU3(Transmission Control Unit)とから構成されている(図1参照)。
【0023】
図1に示すように、TCU3には、デュアルクラッチ40の切替え制御を行なう第1、第2クラッチアクチュエータ17、18が有する各モータ19a、19b、各モータ19a、19bが出力するストロークを検出するストロークセンサ17a、18a、車速センサ23a、23b、第1および第2入力軸回転数センサ24a、24bが接続されている。またTCU3には、後述する第1〜第4シフトクラッチ101〜104をそれぞれ作動させるフォーク駆動機構130の各モータ131、およびストロークを検出するシフトストロークセンサ136〜139が接続されている(図4参照)。これによってTCU3は各機器とデータの授受を行なったり、各機器に対して制御指令を行なったりする。TCU3はECU2と接続されCAN通信によってECU2と相互に情報を交換しながらデュアルクラッチ式自動変速機1の変速制御を適切に行なう。
【0024】
ECU2には、図1に示すようにエンジン4の出力軸4b近傍に設けられたエンジン4の出力軸回転数センサ4a、エンジン4が有するスロットルボデーのスロットルバルブを開閉するモータ、スロットルバルブの開度を検出するスロットル開度センサ、燃料噴射をおこなうインジェクタ(いずれも図略)、およびアクセルペダルPに設けられたアクセル開度センサ27等が接続されている。これによって各機器とデータの授受を行なったり、各機器に対して制御指令を行なったりする。例えば、取得したTCU3からのデータを含んだ以上の情報に基づきスロットルボデーのモータを駆動しスロットルバルブの開度を制御する、或いは、インジェクタの燃料噴射量を制御する等してエンジン回転数Erpmを制御する。
【0025】
図2に示すように、デュアルクラッチ式自動変速機1は、前進7速のデュアルクラッチ式自動変速機であり、ケース10内の軸線方向に、第1入力軸21、第2入力軸22、第1副軸31、および第2副軸32を備えている。またケース10内には、デュアルクラッチ40、各ギヤ段の駆動ギヤ51〜57、最終減速駆動ギヤ58、68、各ギヤ段の従動ギヤ61〜67、後進ギヤ70、およびリングギヤ80を備えている。以降、第1入力軸21、第2入力軸22、第1副軸31、および第2副軸32と同一軸方向を入力軸方向と称す。
【0026】
第1入力軸21は、軸受によりミッションケース11、およびクラッチハウジング12に対して回転可能に支承されている。第1入力軸21の外周面には、軸受けを支持する部位と複数の外歯スプラインが形成されている。そして、第1入力軸21には、複数の奇数段駆動ギヤである1速駆動ギヤ51および3速駆動ギヤ53が直接形成されている。また複数の奇数段駆動ギヤである5速駆動ギヤ55および7速駆動ギヤ57は、第1入力軸21の外周面に形成された外歯スプラインにスプライン嵌合により圧入され固定されている。また、第1入力軸21の端部外周面には、第1クラッチディスク41の内径部にスプライン係合される連結部(スプライン)が形成されている。これにより第1クラッチディスク41の内径部は連結部に係合され第1入力軸21上を入力軸方向に進退移動可能となっている。
【0027】
第2入力軸22は、中空軸状に形成されており、第1入力軸21の1部の外周に複数の軸受を介して回転可能に支承され、且つ、軸受によりミッションケース11、およびクラッチハウジング12に対して回転可能に支承されている。つまり、第2入力軸22は、第1入力軸21に対して同心に相対回転可能に配置されている。また、第2入力軸22の外周面には、第1入力軸21と同様に、軸受けを支持する部位と複数の外歯歯車が形成されている。第2入力軸22には、複数の偶数段駆動ギヤである2速駆動ギヤ52、4速駆動ギヤ54および6速駆動ギヤ56が形成されている。また、第2入力軸22の端部外周面には、第2クラッチディスク42の内径部にスプライン係合される連結部(スプライン)が形成されている。これにより第2クラッチディスク42の内径部は連結部に係合され第2入力軸22上を入力軸方向に進退移動可能となっている。
【0028】
第1副軸31は、軸受によりミッションケース11およびクラッチハウジング12に対して回転可能に支承され、ミッションケース11内において第1入力軸21に平行に配置されている。また、第1副軸31の外周面には、最終減速駆動ギヤ58が形成されるとともに、軸受けを支持する部位と複数の外歯スプラインが形成されている。
【0029】
第1副軸31の外歯スプラインには、後述する第1シフトクラッチ101(本発明の第1シフト機構に該当する)、および第3シフトクラッチ103(本発明の第2シフト機構に該当する)の各クラッチハブ201がスプライン嵌合により圧入されている。最終減速駆動ギヤ58は、リングギヤ80に噛合している。
【0030】
さらに、第1副軸31には、1速従動ギヤ61、および3速従動ギヤ63、4速従動ギヤ64、および後進ギヤ70を遊転可能に支持する支持部が形成されている。
【0031】
1速従動ギヤ61は第1入力軸21に形成された1速駆動ギヤ51と噛合し、1速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって1速従動ギヤ61が選択されると、第1シフトクラッチ101のスリーブ202が1速従動ギヤ61側に移動して1速従動ギヤ61と第1副軸31とを相対回転不能に接続する。これにより1速従動ギヤ61と第1副軸31とが一体的に回転する状態となる(なお、この状態を変速段が成立した状態という。以降2速段〜7速段、および後進段についても同様である)。このとき、第1シフトクラッチ101の作動の状態は第1シフトクラッチ101用のシフトストロークセンサ136によって監視され第1シフトクラッチ101が現状どのような状態であるかTCU3によって把握されている。以降、第2シフトクラッチ102〜第4シフトクラッチ104も同様である。
【0032】
3速従動ギヤ63は、第1入力軸21に形成された3速駆動ギヤ53と噛合し、3速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって3速従動ギヤ63が選択されると、第1シフトクラッチ101のスリーブ202が3速従動ギヤ63側に移動して3速従動ギヤ63と第1副軸31とを相対回転不能に接続する。これにより3速従動ギヤ63と第1副軸31とが一体的に回転する状態(成立状態)となる。
【0033】
4速従動ギヤ64は、第2入力軸22に形成された4速駆動ギヤ54と噛合し、4速ギヤ段(本発明の偶数変速段に該当する)を形成している。そしてTCU3によって4速従動ギヤ64が選択されると、第3シフトクラッチ103のスリーブ202が4速従動ギヤ64側に移動して4速従動ギヤ64と第1副軸31とを相対回転不能に接続する。これにより4速従動ギヤ64と第1副軸31とが一体的に回転する状態(成立状態)となる。
【0034】
さらに、TCU3によって後進ギヤ70が選択されると、第3シフトクラッチ103のスリーブ202が後進ギヤ70側に移動して後進ギヤ70と第1副軸31とを相対回転不能に接続する。これにより後進ギヤ70と第1副軸31とが一体的に回転する状態(成立状態)となる。なお、後進ギヤ70は、第2副軸32に遊転可能に支持される2速従動ギヤ62と一体的に形成された小径ギヤ62aに常に噛合している。
【0035】
第2副軸32は、軸受によりミッションケース11およびクラッチハウジング12に対して回転可能に軸承され、ミッションケース11内において第1入力軸21に平行に配置されている。また、第2副軸32の外周面には、第1副軸31と同様に、最終減速駆動ギヤ68が形成されるとともに、軸受けを支持する部位と複数の外歯スプラインが形成されている。第2副軸32の外歯スプラインには、第2シフトクラッチ102(本発明の第2シフト機構に該当する)、および第4シフトクラッチ104(本発明の第1シフト機構に該当する)の各クラッチハブ201がスプライン嵌合により圧入されている。最終減速駆動ギヤ68は、差動装置14のリングギヤ80に噛合している。リングギヤ80は、最終減速駆動ギヤ58および最終減速駆動ギヤ68に噛合されることで、第1副軸31および第2副軸32に常時回転連結される。このリングギヤ80は、ケース10に軸支される出力軸(図略)および差動装置14を介して駆動軸15a、15bおよび駆動輪16a、16bに回転連結されている。さらに、第2副軸32には、以上、2速従動ギヤ62、5速従動ギヤ65、6速従動ギヤ66、7速従動ギヤ67、を遊転可能に支持する支持部が形成されている。
【0036】
2速従動ギヤ62は第2入力軸22に形成された2速駆動ギヤ52と噛合し、2速ギヤ段(本発明の偶数変速段に該当する)を形成している。そしてTCU3によって2速従動ギヤ62が選択されると、第2シフトクラッチ102のスリーブ202が2速従動ギヤ62側に移動して2速従動ギヤ62と第2副軸32とを相対回転不能に接続する。これにより2速従動ギヤ62と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0037】
また、5速従動ギヤ65は、第1入力軸21に形成された5速駆動ギヤ55と噛合し、5速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって5速従動ギヤ65が選択されると、第4シフトクラッチ104のスリーブ202が5速従動ギヤ65側に移動して5速従動ギヤ65と第2副軸32とを相対回転不能に接続する。これにより5速従動ギヤ65と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0038】
また、6速従動ギヤ66は、第2入力軸22に形成された6速駆動ギヤ56と噛合し、6速ギヤ段(本発明の偶数変速段に該当する)を形成している。そしてTCU3によって6速従動ギヤ66が選択されると、第2シフトクラッチ102のスリーブ202が6速従動ギヤ66側に移動して6速従動ギヤ66と第2副軸32とを相対回転不能に接続する。これにより6速従動ギヤ66と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0039】
さらに、7速従動ギヤ67は、第1入力軸21に形成される7速駆動ギヤ57と噛合し、7速ギヤ段(本発明の奇数変速段に該当する)を形成している。そしてTCU3によって7速従動ギヤ67が選択されると、第4シフトクラッチ104のスリーブ202が7速従動ギヤ67側に移動して7速従動ギヤ67と第2副軸32とを相対回転不能に接続する。これにより7速従動ギヤ67と第2副軸32とが一体的に回転する状態(成立状態)となる。
【0040】
次にデュアルクラッチ40について図1、図2に基づいて説明する。なお、図1、図2のデュアルクラッチ40を比較すると構成が異なる様に見えるが、図2のデュアルクラッチ40は図1のデュアルクラッチ40に対してより簡易的に描いたものであって、図1、図2のデュアルクラッチ40は同じものであることを付け加えておく。
【0041】
デュアルクラッチ40は、第1入力軸21および第2入力軸22に対して同心に設けられている。デュアルクラッチ40は、図2の右側においてクラッチハウジング12に収容され、図1、図2に示すように、第1、第2クラッチディスク41、42、センタプレート43、第1、第2プレッシャプレート44、45、および第1、第2ダイアフラムスプリング46、47(図1参照)を有している。このとき第1クラッチディスク41、センタプレート43、第1プレッシャプレート44および第1ダイアフラムスプリング46によって本発明の第1クラッチを構成している。また第2クラッチディスク42、センタプレート43、および第2プレッシャプレート45および第2ダイアフラムスプリング47によって本発明の第2クラッチを構成している。
【0042】
第1クラッチディスク41はエンジン4の回転駆動力を第1入力軸21に伝達し、第2クラッチディスク42はエンジン4の回転駆動力を2入力軸22に伝達する。前述したように第1クラッチディスク41は、第1入力軸21の連結部に入力軸方向に移動自在にスプライン係合され、第2クラッチディスク42は、第2入力軸22の連結部に入力軸方向に移動自在にスプライン係合されている。
【0043】
センタプレート43は図1、図2に示すように、第1クラッチディスク41と第2クラッチディスク42との間にその面が第1、第2クラッチ41、42の面と平行に対向して配置されている。センタプレート43は第2入力軸22の外周面との間にボールベアリングを介して第2入力軸22と相対回転可能に設けられエンジン4の出力軸4bに連結されて一体回転する。
【0044】
第1および第2プレッシャプレート44、45は図1、図2に示すように、センタプレート43との間でそれぞれ第1、および第2クラッチディスク41、42を挟持し第1、および第2クラッチ41、42と圧着可能に配置されている。
【0045】
第1、第2ダイアフラムスプリング46、47は、円板状に形成されている。図1に示すように第1ダイアフラムスプリング46はセンタプレート43を中心として、入力軸方向に第1プレッシャプレート44と反対側に配置されている。第1ダイアフラムスプリング46の外径部と第1プレッシャプレート44とは円筒状の連結部44aによって連結されている。また第1ダイアフラムスプリング46はセンタプレート43から延在している腕部43aの先端部に支持されている。このような状態において第1ダイアフラムスプリング46の外径部がエンジン4方向に付勢するばね力によって連結部44aをエンジン4側に付勢すると第1プレッシャプレート44が第1クラッチディスク41から離間する。
【0046】
また第1ダイアフラムスプリング46の内径部をエンジン4側に向かって押圧すると第1ダイアフラムスプリング46の外径部のエンジン4方向へのばね力は減衰する。それとともにセンタプレート43から延在している腕部43aの先端部を支点として第1ダイアフラムスプリング46の外径部はエンジン4とは反対方向に移動される。これらによって第1プレッシャプレート44は第1クラッチディスク41方向に移動し、やがてセンタプレート43との間で第1クラッチディスク41を挟持して圧着する。そして完全に係合しエンジン4の回転駆動力が第1入力軸21に伝達される。なお、上記において第1ダイアフラムスプリング46の内径部を押圧する押圧力は内径部を押圧するときのアクチュエータ作動量Lによって制御するが詳細については後述する。
【0047】
また第2ダイアフラムスプリング47は第2プレッシャプレート45の変速機側で且つセンタプレート43の腕部43aのエンジン4側に配置され第2プレッシャプレート45と対向している。第2ダイアフラムスプリング47の外径部は、ばね力がセンタプレート43から延在している腕部43aを変速機側に向かって付勢するよう配置されている。これにより通常時においては第2プレッシャプレート45は第2クラッチディスク42に圧着されないようになっている。そして第2ダイアフラムスプリング47の内径部をエンジン4側に向かって押圧すると腕部43aに接触する第2ダイアフラムスプリング47の外径部を支点として押圧部近傍がエンジン4方向へ移動する。これによって第2プレッシャプレート44がダイアフラムスプリング47に押され第2クラッチディスク42方向に移動し、やがてセンタプレート43との間で第2クラッチディスク42を挟持して圧着する。そして完全に係合しエンジン4の回転駆動力が第2入力軸22に伝達される。なお、第1ダイアフラムスプリング46と同様に第2ダイアフラムスプリング47の内径部を押圧する押圧力は内径部を押圧するときのアクチュエータ作動量Lによって制御する。
【0048】
上述した第1ダイアフラムスプリング46、および第2ダイアフラムスプリング47の内径部の押圧は、図1に示す第1、および第2クラッチアクチェータ17、18によって行なう。第1、および第2クラッチアクチェータ17、18は、それぞれ直流電動モータ19a、19bと、直流電動モータ19a、19bの作動によってボールねじ構造により直線運動するロッド25a、25bと、ロッド25a、25bの直線運動を第1、第2ダイアフラムスプリング46、47の各内径部に伝達する伝達部26a、26bと、ロッド25a、25bの直線運動のアクチュエータ作動量L1、L2を検出するストロークセンサ17a、18aと、を有している。そして、ストロークセンサ17a、18aにより検出されたロッド25a、25bのアクチュエータ作動量L1、L2に関する情報はTCU3に送信される。
【0049】
デュアルクラッチ40がこのように構成されるので、TCU3から変速指令が送出されると、TCU3は第1クラッチアクチュエータ17、または第2クラッチアクチュエータ18を所定のアクチュエータ作動量L1、L2だけ作動させ、エンジン4から入力軸に伝達されるクラッチトルクを制御する。これによりTCU3は第1クラッチディスク41および第2クラッチディスク42のうち、第1入力軸21、および第2入力軸22のうちのエンジン4から切り離される入力軸に対応するクラッチを切離する切離制御を行なう。具体的には直流電動モータ19a、または19bのロッド25a、25bの作動を第1ダイアフラムスプリング46、または第2ダイアフラムスプリング47の内径部が変速機側に向かって移動するよう制御する。
【0050】
またTCU3は、第1クラッチディスク41および第2クラッチディスク42のうち、第1入力軸21および第2入力軸22のうちのエンジン4に接続される入力軸に対応するクラッチを、クラッチトルクが、目標クラッチトルクになるよう制御する。そして、エンジン4の回転数Neが、接続される入力軸の回転数Niと同期すると接続する係合制御を行なう。具体的にはモータ19a、または19bのロッド25a、25bの作動を第1ダイアフラムスプリング46、または第2ダイアフラムスプリング47の内径部がエンジン4側に向かって押圧されるよう制御する。
【0051】
なお、上記クラッチトルクはアクチュエータ作動量と相関関係を有している。この相関関係は事前に取得されTCU3が有するROMに記憶されている。このためTCU3は各クラッチディスクを好適に係合させるために事前に取得された相関関係データから目標となる目標クラッチトルクに対応するアクチュエータ作動量Lを読み取る。そして制御するアクチュエータ作動量L1、L2が該読み取ったアクチュエータ作動量となるよう制御し目標クラッチトルクでの制御を実現する。なお、アクチュエータ作動量Lは常時、ストロークセンサ17a、18aからデータを取得することにより監視している。
【0052】
次に、第1〜第4シフトクラッチ101〜104について図2〜図4に基づいて説明する。図2〜図4に示す各フォーク72a、72b、72c、72dは、第1〜第4シフトクラッチ101〜104が有するスリーブ202の外周部に係合してスリーブ202を軸方向にスライドさせる部材である。各フォーク72a〜72dは、それぞれのフォーク駆動機構130によって駆動される。
【0053】
フォーク駆動機構130は、第1〜第4シフトクラッチ101〜104をそれぞれ駆動するために本実施形態においては4つ設けられている。図4に示すように、それぞれのフォーク駆動機構130は、回転軸にウォームギヤ132が形成されたモータ131、ウォームギヤ132に噛合するウォームホイール133、ウォームホイール133に同心に一体的に形成されたピニオンギヤ134、ピニオンギヤ134に噛合するラック軸135を備えている。このラック軸135には、各フォーク72a〜72dがそれぞれ一体に設けられている。つまり、それぞれのフォーク駆動機構130のモータ131を回転することで、そのモータ131に連結されているフォーク72a〜72dが第1副軸31または第2副軸32の軸方向にスライドする。
【0054】
また、図4に示すようにフォーク72a〜72dが軸方向にスライドして移動するストローク量を検出するためのシフトストロークセンサ136〜139がピニオンギヤ134の回転軸近傍にそれぞれ設けられている。シフトストロークセンサ136〜139はTCU3に接続されTCU3の演算部にてウォームホイール133の回転数がストローク量に変換される。なお、シフトストロークセンサ136〜139はモータ131の回転軸近傍に設けてもよい。
【0055】
第1シフトクラッチ101は、第1副軸31の軸方向において1速従動ギヤ61と3速従動ギヤ63との間に配置されている。第2シフトクラッチ102は、第2副軸32の軸方向において2速従動ギヤ62と6速従動ギヤ66との間に配置されている。また第3シフトクラッチ103は、第1副軸31の軸方向において4速従動ギヤ64と後進ギヤ70との間に配置されている。さらに第4シフトクラッチ104は、第2副軸32の軸方向において5速従動ギヤ65と7速従動ギヤ67との間に配置されている。
【0056】
図2、図3に示すように第1シフトクラッチ101は、第1副軸31にスプライン固定されたクラッチハブ201と、1速従動ギヤ61に圧入固定された1速係合部材205と、3速従動ギヤ63に圧入固定された3速係合部材205と、クラッチハブ201と左右の各係合部材205、205の間にそれぞれ介在されたシンクロナイザリング203と、クラッチハブ201の外周に軸線方向移動自在にスプライン係合されたスリーブ202とを有し、各従動ギヤ61、63を交互に第1入力軸21に離脱可能に接続する周知のシンクロメッシュ機構である。
【0057】
第1シフトクラッチ101のスリーブ202は、中立位置では係合部材205、205の何れにも係合されていない。しかしフォーク駆動機構130の作動によってラック軸135が入力軸方向に駆動され、ラック軸135に固定されスリーブ202の外周の環状溝に係合されたフォーク72aによりスリーブ202が1速従動ギヤ61側にシフトされれば、スリーブ202の内歯は1速従動ギヤ61側のシンクロナイザリング203にスプライン係合する。そしてシンクロナイザリング203を1速従動ギヤ61に押しつけながら第1副軸31と1速従動ギヤ61の回転を同期させる。次にスリーブ202の内歯が1速係合部材205の外周の外歯スプラインと係合し、第1副軸31と1速従動ギヤ61を一体的に連結して1速ギヤ段を形成する。またフォーク駆動機構130によりフォーク72aがスリーブ202を3速従動ギヤ63側にシフトさせれば、同様にして第1副軸31と3速従動ギヤ63の回転を同期させた後にこの両者を一体的に連結して3速ギヤ段を成立させる。
【0058】
第2〜第4シフトクラッチ102〜104は、第1シフトクラッチ101と実質的に同一構造で取り付け位置が異なるのみである。第2シフトクラッチ102は2速従動ギヤ62および6速従動ギヤ66を第2副軸32に選択的に連結して相対回転不能とし2速ギヤ段および6速ギヤ段を成立させる。また第3シフトクラッチ103は4速従動ギヤ64および後進ギヤ70を第1副軸31に選択的に連結して相対回転不能とし4速ギヤ段および後進ギヤ段を成立させる。さらに第4シフトクラッチ104は5速従動ギヤ65および7速従動ギヤ67を第2副軸32に選択的に連結して相対回転不能とし5速ギヤ段および7速ギヤ段を成立させる。
【0059】
ここで上述したシフトの区分された段階(状態)の遷移をスリーブ202の内径部に形成された内歯のチャンファ部202a、およびシンクロナイザリング203の外周面に形成されたチャンファ部203aの相対的な位置関係に基づいて詳細に説明する。今回の説明においては、代表として第2シフトクラッチ102によって、はじめに中立状態にあるスリーブ202が2速従動ギヤ62側に移動する場合における下記4段階について説明する。なお、第2〜第4シフトクラッチ102〜104によって切替えられる他のギヤ段についても同様の段階を有する。
【0060】
図5(a)は、スリーブ202が2速従動ギヤ62と6速従動ギヤ62の中間にあり、いずれにも係合していない中立段階(状態)である。
次に図5(b)は、スリーブ202が2速従動ギヤ61への進入を開始する入り工程と称される段階である。入り工程は図5(c)で説明する同期工程までの間を指す。入り工程は比較的短時間で終了する工程である。
【0061】
図5(c)は、スリーブ202のチャンファ部202aが2速従動ギヤ62側のシンクロナイザリング203が有するチャンファ部203aに接触し、シンクロナイザリング203を2速係合部材205および2速従動ギヤ62に押しつけてスリーブ202と2速従動ギヤ62との回転を同期させる同期工程と称される段階である。同期開始から同期完了までの同期工程は4段階の中で比較的長い時間を占める段階となっている。
【0062】
そして最後の図5(d)は、スリーブ202のチャンファ部202aが2速従動ギヤ62側のシンクロナイザリング203が有するチャンファ部203aを押し分けて2速従動ギヤ62に接近していく押し分け工程と称される段階である。押し分け工程が開始される時には既にスリーブ202と2速従動ギヤ62との同期は完了している。そのため押し分け工程の開始後にはスリーブ202のチャンファ部202aは速やかに2速従動ギヤ62に到達する。そしてその後、2速従動ギヤ62と完全に係合されて2速従動ギヤ62と第2副軸32とを相対回転不能に接続する。本発明においては、上記中立状態〜押し分け工程の4段階のうちで、運転者が加速のためアクセルを踏込んだ時点ではどの位置にスリーブ202が位置しているかを確認し、位置した工程によってシフト完了までの時間を予測して該予測時間の大きさによって変速するギヤ段を選択するものである。
【0063】
次に本発明に係る変速制御装置を構成するTCU3について説明する。TCU3は前述の通り第1〜第4シフトクラッチ101〜104を作動させるフォーク駆動機構130、およびデュアルクラッチ40が有する第1クラッチディスク41および第2クラッチディスク42の切替えを行なう第1、第2クラッチアクチュエータ17、18を制御する。
【0064】
またTCU3は現在ギヤ段検出部111、要求ギヤ段演算部112、アクセル踏込検出部114、シフト進行度演算部115、および走行ギヤ段選択制御部116を有している。
【0065】
現在ギヤ段検出部111は現在成立している現在ギヤ段Gpを検出する。ここで現在ギヤ段Gpとは、現在、車両走行に適用されているギヤ段を含む、第1〜第4シフトクラッチ101〜104(第1および第2シフト機構)の作動によって成立されているギヤ段のことをいう。現在ギヤ段Gpはフォーク駆動機構130による作動のデータから判定する。具体的にはスリーブ202の入力軸方向への作動をフォーク駆動機構130のピニオンギヤ134軸近傍に設けたシフトストロークセンサ136〜139によって検出する。そして検出されたストローク量から成立しているギヤ段を演算する。
【0066】
要求ギヤ段演算部112は、運転者のアクセル操作状態、車両の走行状態および変速線等に基づき前記現在ギヤ段Gpの次に選択すべき要求ギヤ段Gdを演算する。実際には要求ギヤ段Gdの演算は事前に準備されTCU3のROMに記憶される変速線に基づいて行なわれる。ただし要求ギヤ段はどのように求めてもよい。
【0067】
図6に示す変速線は、代表として例えば増速側である2速段から3速段への変速線Aおよび減速側である3速段から2速段への変速線Bを示している。変速線は車両の変速時に利用されるマップデータであり、予め選択したギヤ段選択パラメータ(本実施形態においては車速とアクセルペダル開度)を各軸にとり、一のギヤ段から他のギヤ段への変速の要否を判断するための基準線である。なお、図6に示すように、デュアルクラッチ式自動変速機1においては、変速線Aの若干手前に破線で示したプレ変速線aを有している。プレ変速線aとは所定のアクセル開度と車速との関係が高変速段側に向かってプレ変速線aを越えた場合に、フォーク駆動機構130によって、越えた各プレ変速線に対応するギヤ段(要求ギヤ段Gd)へのシフトが開始されるための変速線である。
【0068】
また同様に減速時における変速線Bの若干手前には破線で示したプレ変速線bを有している。これによりアクセルPをOFFにしたり緩めたりして、車速が減速しアクセル開度と車速との関係がプレ変速線bを低変速段側に向かって越えると、フォーク駆動機構130によって、プレ変速線bに対応するギヤ段(要求ギヤ段Gd)へのシフトが開始される。
【0069】
増速側の変速について詳細に説明する。例えば運転者が第2入力軸22と第2副軸32とによって成立されている2速ギヤ段で走行中にアクセルペダルを踏込み、アクセル開度と車速との関係が3速ギヤ段のプレ変速線aと交差すると、TCU3は、第1副軸31が有する3速従動ギヤ63を選択する。このとき要求ギヤ段Gdは3速段であるとし記憶部に記憶される。そしてTCU3の制御によってフォーク駆動機構130が第1シフトクラッチ103を作動させて3速従動ギヤ63と第1副軸31とを相対回転不能に接続し3速ギヤ段を成立させる。これにより第1副軸31と第1入力軸21とが3速ギヤ段を介して一体回転する。このとき本発明においては3速ギヤ段および走行に適用されている2速ギヤ段が実際に成立しており現在ギヤ段となる。次に、アクセル開度と車速との関係が3速ギヤ段の変速線Aを越えるとTCU3は、第2クラッチアクチュエータ18が、第2クラッチディスク42の係合を解除しエンジン4と第2入力軸22との接続を切離制御する。またそれと同時に第1クラッチアクチュエータ17が、第1クラッチディスク41を目標クラッチトルクで制御しエンジン4の回転と同期させながら係合させる係合制御を行なう。これによりエンジン4の回転トルクが第1入力軸21、および成立された3速ギヤ段を介して第1副軸31に伝達され車両が3速ギヤ段によって走行される。他のギヤ段の変速方法も同様である。
【0070】
次に減速側の変速について説明する。減速時においても増速時と同様に車速が減少し、アクセル開度と車速との関係がプレ変速線と交差するとTCU3がフォーク駆動機構130を作動させ各プレ変速線に対応するギヤ段へのシフトが開始される。このとき交差したプレ変速線に対応するギヤ段を要求ギヤ段Gdとし、TCU3の記憶部に記憶する。例えば運転者が第1入力軸21と第1副軸31とによって成立されている3速ギヤ段で走行中にアクセルペダルをOFFして車速が減少しアクセル開度と車速との関係が2速ギヤ段のプレ変速線bと交差すると、TCU3は、第2副軸32が有する2速従動ギヤ62を選択する。そしてフォーク駆動機構130が第2シフトクラッチ102を作動させて2速従動ギヤ62と第2副軸32とを相対回転不能に接続し2速ギヤ段を成立させる。これにより第2副軸32と第2入力軸22とが2速ギヤ段を介して一体回転する。このとき本発明においては2速ギヤ段および走行に適用されている3速ギヤ段が実際に成立しており現在ギヤ段となる。
【0071】
次に、アクセル開度と車速との関係が2速ギヤ段の変速線Bを越えるとTCU3は、第1クラッチアクチュエータ17によって第1クラッチディスク41の係合を解除しエンジン4と第1入力軸21との接続を切離制御する。また同時に第2クラッチアクチュエータ18が、第2クラッチディスク42を目標クラッチトルクで制御しエンジン4の回転と同期させながら係合させる係合制御を行なう。これによりエンジン4の回転トルクが第2入力軸22、および成立された2速ギヤ段を介して第2副軸32に伝達され車両が2速ギヤ段によって走行される。他のギヤ段の変速方法も同様である。
【0072】
アクセル踏込検出部114は、運転者のアクセルPの踏込みを検出する。このときアクセルの踏込みのONとOFFのみを検出しても良いが、本実施形態においてはアクセルPの踏込み開度、およびアクセルPの踏込み速度も同時に検出する。
【0073】
シフト進行度演算部115は、アクセル踏込検出部114によってアクセルPが踏込まれたことが検出されると、アクセルの踏込みが検出された時点での要求ギヤ段Gpに向かってシフト中である第1〜第4シフトクラッチ101〜104のうちのいずれかのシフトクラッチのシフト進行度を演算する。ここでいうシフト進行度とは、上記で説明した第1〜第4シフトクラッチ101〜104の区分された4段階内での進行度のことをいう。4段階のそれぞれの位置と第1〜第4シフトクラッチ101〜104の各スリーブ202の各ストロークとの関係は事前に取得されTCU3のROMに記憶されている。そこでシフト進行度演算部115ではフォーク駆動機構130が有しているシフトストロークセンサ136〜139が取得するシフトストロークによって各スリーブ202の位置を取得し、4段階のうちどの位置に位置するかを演算する。
【0074】
走行ギヤ段選択制御部116は、演算されたシフト進行度が予め設定された事前の実験によって決定されTCU3の記憶部に記憶されるシフト変更閾値Eより大きい場合には、第1〜第4シフトクラッチ101〜104(第1シフト機構および前記第2シフト機構)のいずれかのシフトクラッチによって要求ギヤ段Gdが成立されるまで待ち、その後要求ギヤ段Gdに対応するクラッチを接続して走行する。つまりシフト進行度がシフト変更閾値Eよりも大きい場合はシフト完了までの残存時間は短く、シフトを続行しても短時間で変速が完了するので、そのまま要求ギヤ段Gdを成立させ、要求ギヤ段Gdによって車両を力強く走行させる。
【0075】
また演算されたシフト進行度がシフト変更閾値Eより小さい場合には、第1〜第4シフトクラッチ101〜104のいずれかのシフトクラッチによって成立している現在ギヤ段に対応するクラッチを接続し走行させる。つまり、演算されたシフト進行度がシフト変更閾値Eより小さい場合には、変速の完了までに時間がかかることがわかる。このため要求ギヤ段Gdへのシフトの完了を待っていると、待っている間にトルクの低下が発生してしまう。そこで走行ギヤ段選択制御部116では、すでに成立している現在ギヤ段Gpでの走行を選択することによりエンジン4の回転駆動力が切断された状態が長引くことにより発生するトルク低下を抑制することができる。
【0076】
なお、上記の場合における、成立している現在ギヤ段とは、現在車両の走行に適用されているギヤ段のことである。つまり、要求ギヤ段Gdに向かっていずれかのシフトクラッチが作動している時には、それまで成立し待機していたいずれかのギヤ段はすでに解除されているためである。
【0077】
次に、上述の第1の実施形態の構成におけるデュアルクラッチ式自動変速機1の動作、作用について図7、図8および図9のフローチャートに基づいて説明する。本実施形態においてはアクセルOFF状態(図7(a)参照)における減速中から運転者がアクセルPを踏込み、加速を要求した場合について説明する。なお、このとき運転者がアクセルPを踏込んだときには、車両は3速ギヤ段(現在ギヤ段Gp)で走行しているものとする。またアクセルPを踏込む少し前にはアクセル開度と車速との関係が図6のプレ変速線dを3速ギヤ段側から通過したことによって要求ギヤ段Gdとなる2速ギヤ段へのシフトの要求がTCU3から送信されたものとする。これにより運転者がアクセルPを踏込んだときには、第2副軸32が有する2速ギヤ段の2速従動ギヤ62へのシフトが既に開始されている。
【0078】
ステップ10(アクセル踏込検出ステップ)では、アクセル踏込み検出部114が運転者のアクセルPの踏込みを検出するとステップS11に進み、踏込みが検出されなければプログラムを終了する。このとき踏込みと判定するための踏込み量の閾値は実験等によって任意に設定される。またこのときアクセル踏込み検出部114では、同時にアクセルPの踏込み速度および踏込み量が取得され所定の記憶部に記憶される。
【0079】
ステップS11(シフト進行度演算ステップ)では、運転者がアクセルPを踏込んだ時点における第1〜第4シフトクラッチ101〜104のうち要求ギヤ段Gdに対応するいずれかのシフトクラッチによる要求ギヤ段Gdへのシフト進行度がシフト進行度演算部115によって演算される。本実施形態においては、図7に示すように運転者がアクセルを踏込んだ時点の少し前に、要求ギヤ段Gdである2速ギヤ段の2速従動ギヤ62へのシフトが第2シフトクラッチ102の作動によって開始されている。これに伴い現在ギヤ段Gpとして成立し待機していた4速ギヤ段の4速従動ギヤ64の成立は2速従動ギヤ62へのシフトの開始前に第3シフトクラッチ103の作動によって解除され中立状態となっている。
【0080】
このとき検出される要求ギヤ段Gdである2速ギヤ段の2速従動ギヤ62へのシフト進行度は前述したようにスリーブ202が、中立状態、入り工程、同期工程、押し分け工程の4段階のうちどこの段階に位置するかを検出するものである。シフト進行度はシフトストロークセンサ136〜139が取得するシフトストロークに基づきシフト進行度演算部115が第2シフトクラッチ102のスリーブ202の位置を演算し求める。このとき4段階のうちどの段階に位置しているかのみを演算するだけでもよい。これによっても大まかなシフト完了までの残存時間は推定できる。しかし本実施形態においては、4段階のそれぞれのなかでどの位置までスリーブ202の作動が進行しているかをさらに演算している。具体的には同期工程は比較的時間のかかる工程であるので、例えば同期工程の中で、どこに位置する(例えば同期開始から70%経過した位置等)か、を判定する。これによりシフト完了までの予測がより精度良く行なわれる。
【0081】
ステップS12(走行ギヤ段選択制御ステップ)では、走行ギヤ段選択制御部116によってステップS11で演算された2速ギヤ段(要求ギヤ段Gd)の2速従動ギヤ62へのシフト進行度と予め設定されたシフト変更閾値Eとが比較される。ここでは例えばシフト変更閾値Eを同期開始から60%経過した位置とする(図8参照)。そしてシフト進行度がシフト変更閾値Eよりも大きい場合(たとえば前述のように同期開始から70%経過した位置であった場合)はステップS13に移動し、2速従動ギヤ62に対応する第2シフトクラッチ102によって2速ギヤ段(要求ギヤ段Gd)を成立させる。そして2速ギヤ段(要求ギヤ段Gd)の成立後に第1クラッチ41を切離制御するとともに、2速ギヤ段(要求ギヤ段Gd)に対応する第2クラッチ42を係合制御して接続し、エンジン4と第2入力軸22とを連結して車両を力強く加速させる(図7(b)参照)。そしてこの後、プログラムを終了する。なお、ここで更閾値Eを同期開始から60%経過した位置としたのはあくまで一例を示したものに過ぎずどのように設定してもよい。
【0082】
またステップS12で、演算された2速ギヤ段(要求ギヤ段Gd)のシフト進行度がシフト変更閾値Eより小さい場合には、変速の完了までに時間がかかると予測できるのでステップS14に移動する。そして車両を走行させていた現在ギヤ段Gpである3速ギヤ段に対応する第1クラッチ41を引き続き接続し車両を走行させる。これによりエンジン4の回転駆動力が切断されることがなく大幅なトルク低下の発生を抑制できる(図7(b)参照)。
【0083】
上述の説明から明らかな様に、第1の実施形態に係るデュアルクラッチ式自動変速機1においては、車両走行中に運転者が加速のためアクセルPを踏込んだ場合に、アクセルPを踏込んだ時点における要求ギヤ段Gdへのシフトの進行度がシフト進行度演算部115によって演算される。そして演算された進行度が予め設定されたシフト変更閾値Eより大きいか否かを演算する。シフト進行度がシフト変更閾値Eより大きい場合には、このままシフトを続行すると短時間で変速が完了する。この場合は、シフトを続行させ要求ギヤ段Gdにできるだけ速やかにシフトし、シフト後、要求ギヤ段Gdに対応するクラッチを接続し車両を力強く加速させて走行させる。また、アクセルを踏込んだ時点でのシフト進行度がシフト変更閾値Eより小さい場合には、変速の完了までに時間がかかる。この場合、要求ギヤ段Gdへのシフトの完了を待っているとトルクの低下が発生してしまう。そこですでに成立されている現在ギヤ段に対応するクラッチを引き続き接続し車両を走行させる。これにより、トルクの低下を抑制でき運転者が感じるフィーリングの悪化を防止できる。
【0084】
また第1の実施形態に係るデュアルクラッチ式自動変速機1においては、シフト進行度演算部115の演算は、要求ギヤ段Gdに向ってシフト中の第1シフト機構(第1、第4シフトクラッチ101、104)または第2シフト機構(第2、第3シフトクラッチ102、103)が位置する区分された4つの段階(中立状態〜押し分け工程)に基づいて行なう。このような低コスト、かつ簡易な構成によってシフトの進行度を容易に演算できる。
【0085】
次に第2の実施形態のデュアルクラッチ式自動変速機5について説明する(図1参照)。第2の実施形態は第1の実施形態に対して変速制御装置を構成するTCU8がシフト時間計測部117を有していることのみ異なる。よって同様の部分については説明を省略し、異なる部分についてのみ説明する。また同様の部品や部分については同じ符号を付して説明する。
【0086】
シフト時間計測部117は要求ギヤ段Gdへのシフトの開始時点(図7参照)から計時を行なう。第2の実施形態においてシフト進行度演算部115における進行度の演算は、シフトの開始時点から運転者によってアクセルが踏込まれた時点までの経過時間をシフト時間計測部117によって計測する。シフトの開始時点はフォーク駆動機構130が有しているシフトストロークセンサ136〜139のデータから検出すればよい。そして予めTCU8が事前に有しているシフトの開始からシフト完了までのシフト所定時間から前記経過時間を減算して完了までの残存時間を演算する。そして演算した残存時間から進行度を求め、進行度が予め設定されたシフト変更閾値Eより大きいか否かを演算する。そしてこれ以降の判定方法は第1の実施形態と同様である。このような時間の計測によりシフトの進行度をより高精度に演算できる。
【0087】
次に第3の実施形態のデュアルクラッチ式自動変速機6について説明する(図1参照)。第3の実施形態は第1の実施形態に対して運転者が踏込んだアクセルPのアクセル踏込み量およびアクセル踏込み速度の少なくとも一方を検出し該アクセル踏込み量およびアクセル踏込み速度に応じてシフト変更閾値Eの値を変更する点のみ異なる。よって同様の部分については説明を省略し、異なる部分についてのみ説明する。また同様の部品や部分については同じ符号を付して説明する。
【0088】
アクセルPのアクセル踏込み量(開度)及びアクセル踏込み速度についてはアクセル踏込検出部114が検出したデータを利用する。アクセル踏込み量(開度)およびアクセル踏込み速度の少なくとも一方が大きいときには運転者が大きな加速を強く望んでいると判断できる。そこで加速力のより大きな要求ギヤ段Gdの選択がし易いようにシフト変更閾値Eをシフト完了までの予測時間が長くなる方、つまりシフト進行度が小さい方(図8においては左方)へずらし変更する。このとき、変更する量については、アクセル踏込み量およびアクセル踏込み速度に応じて決定するが、運転者の感覚と合致するよう事前に実験により評価し決定されることが好ましい。これによって要求ギヤ段Gdの選択の可能性が高くなり、多少のもたつき感が発生しても運転者の要求通りに要求ギヤ段Gdによって力強い加速力を得ることができる。なお、アクセル踏込み量(開度)およびアクセル踏込み速度の少なくとも一方が小さいときには、上記と逆方向にシフト変更閾値Eをずらせばよい。
【0089】
次に第4の実施形態のデュアルクラッチ式自動変速機7について説明する(図1参照)。第4の実施形態は第1乃至第3の実施形態に対してTCU9(変速制御装置)が加速力演算部118を有している。よって同様の部分については説明を省略し、異なる部分についてのみ説明する。また同様の部品や部分については同じ符号を付して説明する。
【0090】
加速力演算部118は要求ギヤ段加速力、現在ギヤ段加速力、および運転者要求加速力を夫々演算する。要求ギヤ段加速力は要求ギヤ段Gdにシフトした場合に得られる加速力である。現在ギヤ段加速力は現在ギヤ段Gpで走行した場合に得られる加速力である。運転者要求加速力は運転者が踏込んだアクセル踏込み量およびアクセル踏込み速度の少なくとも一方から求めた運転者が要求している加速力である。
【0091】
そして、演算された要求ギヤ段加速力および現在ギヤ段加速力のうち運転者要求加速力により近い加速力を実現することができる要求ギヤ段Gdまたは現在ギヤ段Gpのいずれかが選択できるよう走行ギヤ段選択制御部116において、シフト変更閾値Eを変更する。要求ギヤ段Gdを選択し易くするためには図8においてシフト変更閾値Eを左方にずらせばよい。また現在ギヤ段Gpを選択し易くするためには図8においてシフト変更閾値Eを右方にずらせばよい。このとき、変更する量については、運転者の感覚と合致するよう事前に実験により評価し決定されることが好ましい。これにより、車両は常に運転者が要求する運転者要求加速力に近い加速力で走行でき、運転者の加速力に対する満足感を満たすことができる。
【0092】
なお、本実施形態においては、第1入力軸21に、奇数段の駆動ギヤ51、53、55および57を固定して設け、第2入力軸22に、偶数段の駆動ギヤ52、54、および56を固定して設けた。そして第1副軸31および第2副軸32に、第1入力軸21の奇数段駆動ギヤと噛合して奇数変速段を成立させる従動ギヤ61、63、65、67と、第2入力軸22の偶数段駆動ギヤと噛合して偶数変速段を成立させる従動ギヤ62、64、66とを遊転可能に設けた。しかし、この態様に限らず第1入力軸21および第2入力軸22に、それぞれ駆動ギヤ51、53、55、57と駆動ギヤ52、54、56とを遊転可能に設けてもよい。そしてこのときには第1副軸31、および第2副軸32に1速〜7速従動ギヤ61〜67を固定して設けてやればよい。
【0093】
また、特開2011−144872公報の図1に開示されるデュアルクラッチ式自動変速機(FR用)のように7速駆動ギヤ26aのみを第1入力軸15に遊転可能に設け、7速駆動ギヤ26aに噛合する7速従動ギヤ26bを第2副軸18に固定して設けてもよい。さらに公報の図1に示すように切替えクラッチ30Dが紙面右方に移動することによって第1入力軸15と出力軸19とを直結するよう構成してもよい。このようなFR用デュアルクラッチ式自動変速機においても同様の効果が得られる。
【0094】
また、本実施形態においては、ラック軸135を4本設け、それぞれのラック軸135に対して設けたフォーク72a〜72dを各々作動させて各ギヤ段の切り替えを行なった。しかしこれに限らずセレクト用モータを設け、セレクト用モータの駆動によりフォークシャフトを選択し、選択したフォークシャフトをシフト用モータによってスライドさせて各ギヤ段の切り替えを行なってもよい。
【0095】
また、本実施形態に係るデュアルクラッチ40を構成する第1、第2クラッチディスク41、42、センタプレート43、および第1、第2プレッシャプレート44、45の各配置については、本実施形態において説明した態様に限らず、どのように配置して構成してもよい。
【0096】
また、本実施形態においては、本発明に係るデュアルクラッチ式自動変速機として前進7速の変速段を有するデュアルクラッチ式自動変速機にて説明した。しかし、この態様に限らずデュアルクラッチ式自動変速機は7速を越える前進変速段、または6速以下の前進変速段を有するものでもよい。これによっても同様の効果が得られる。
【0097】
さらに、デュアルクラッチ式自動変速機を、自動車に適用するのではなく、自動二輪車等の他の自動変速機に適用してもよい。
【符号の説明】
【0098】
1、5、6、7・・・デュアルクラッチ式自動変速機、2・・・変速制御装置(ECU)、 3、8、9・・・変速制御装置(TCU)、4・・・エンジン、4a・・・回転数センサ、10・・・ケース、11・・・ミッションケース、12・・・クラッチハウジング、17・・・第1クラッチアクチュエータ、18・・・第2クラッチアクチュエータ、21・・・第1入力軸、22・・・第2入力軸、23a、23b・・・車速センサ、31・・・第1副軸、32・・・第2副軸、40・・・デュアルクラッチ、41・・・第1クラッチディスク、42・・・第2クラッチディスク、43・・・センタプレート、44・・・第1プレッシャプレート、45・・・第2プレッシャプレート、51〜57・・・ギヤ段の駆動ギヤ、58、68・・・最終減速駆動ギヤ、61〜67・・・ギヤ段の従動ギヤ、62a・・・小径ギヤ、70・・・後進ギヤ、72a〜72d・・・フォーク、135・・・ラック軸、101、104・・・第1シフト機構(第1、第4シフトクラッチ)、102、103・・・第1シフト機構(第2、第3シフトクラッチ)、111・・・現在ギヤ段検出部、112・・・要求ギヤ段演算部、114・・・アクセル踏込み検出部、115・・・シフト進行度演算部、116・・・走行ギヤ段選択制御部、117・・・シフト時間計測部、118・・・加速力演算部、130・・・フォーク駆動機構、201・・・クラッチハブ、202・・・スリーブ、203・・・シンクロナイザリング。
【特許請求の範囲】
【請求項1】
同心に配置された第1入力軸および第2入力軸と、
原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、
前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、
変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置と、を備え、
前記変速制御装置は、
現在成立している現在ギヤ段を検出する現在ギヤ段検出部と、
運転者のアクセル操作状態および車両の走行状態に基づき前記現在ギヤ段の次に選択すべき要求ギヤ段を演算する要求ギヤ段演算部と、
前記運転者のアクセルの踏込みを検出するアクセル踏込検出部と、
前記アクセル踏込検出部によって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算部と、
前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御部と、
を備えるデュアルクラッチ式自動変速機。
【請求項2】
請求項1において、
前記シフト進行度演算部における前記進行度の演算は、前記要求ギヤ段にシフト中の前記第1シフト機構または前記第2シフト機構のシフトの区分された段階に基づいて行なうデュアルクラッチ式自動変速機。
【請求項3】
請求項1または2において、
前記変速制御装置は、前記要求ギヤ段へのシフトの開始時点から計時を行なうシフト時間計測部を有し、
前記シフト進行度演算部における前記進行度の演算は、前記シフト時間計測部によって計測された前記シフトの開始時点から前記アクセルの踏込みが検出されたときまでの経過時間と前記シフトの開始時点からシフト完了までのシフト所定時間に基づいて行なうデュアルクラッチ式自動変速機。
【請求項4】
請求項1乃至3のいずれか1項において、
前記アクセル踏込検出部は前記運転者が踏込んだ前記アクセルのアクセル踏込み量およびアクセル踏込み速度の少なくとも一方を検出し、
前記走行ギヤ段選択制御部は前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方の大きさに応じて前記シフト変更閾値を変更するデュアルクラッチ式自動変速機。
【請求項5】
請求項1乃至4のいずれか1項において、
前記要求ギヤ段にシフトした場合に得られる要求ギヤ段加速力、前記現在ギヤ段の場合に得られる現在ギヤ段加速力、および前記運転者が踏込んだ前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方から求めた前記運転者が要求している運転者要求加速力を夫々演算する加速力演算部を有し、
前記走行ギヤ段選択制御部において、演算された前記要求ギヤ段加速力および前記現在ギヤ段加速力のうち前記運転者要求加速力により近い加速力を実現できる前記要求ギヤ段または前記現在ギヤ段が選択されるよう前記シフト変更閾値を変更するデュアルクラッチ式自動変速機。
【請求項6】
同心に配置された第1入力軸および第2入力軸と、原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置とを備えたデュアルクラッチ式自動変速機の前記変速制御装置の変速制御方法であって、
前記変速制御方法は、
前記運転者のアクセルの踏込みを検出するアクセル踏込検出ステップと、
前記アクセル踏込検出ステップによって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算ステップと、
前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御ステップと、
を備えるデュアルクラッチ式自動変速機の変速制御方法。
【請求項1】
同心に配置された第1入力軸および第2入力軸と、
原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、
前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、
変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置と、を備え、
前記変速制御装置は、
現在成立している現在ギヤ段を検出する現在ギヤ段検出部と、
運転者のアクセル操作状態および車両の走行状態に基づき前記現在ギヤ段の次に選択すべき要求ギヤ段を演算する要求ギヤ段演算部と、
前記運転者のアクセルの踏込みを検出するアクセル踏込検出部と、
前記アクセル踏込検出部によって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算部と、
前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御部と、
を備えるデュアルクラッチ式自動変速機。
【請求項2】
請求項1において、
前記シフト進行度演算部における前記進行度の演算は、前記要求ギヤ段にシフト中の前記第1シフト機構または前記第2シフト機構のシフトの区分された段階に基づいて行なうデュアルクラッチ式自動変速機。
【請求項3】
請求項1または2において、
前記変速制御装置は、前記要求ギヤ段へのシフトの開始時点から計時を行なうシフト時間計測部を有し、
前記シフト進行度演算部における前記進行度の演算は、前記シフト時間計測部によって計測された前記シフトの開始時点から前記アクセルの踏込みが検出されたときまでの経過時間と前記シフトの開始時点からシフト完了までのシフト所定時間に基づいて行なうデュアルクラッチ式自動変速機。
【請求項4】
請求項1乃至3のいずれか1項において、
前記アクセル踏込検出部は前記運転者が踏込んだ前記アクセルのアクセル踏込み量およびアクセル踏込み速度の少なくとも一方を検出し、
前記走行ギヤ段選択制御部は前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方の大きさに応じて前記シフト変更閾値を変更するデュアルクラッチ式自動変速機。
【請求項5】
請求項1乃至4のいずれか1項において、
前記要求ギヤ段にシフトした場合に得られる要求ギヤ段加速力、前記現在ギヤ段の場合に得られる現在ギヤ段加速力、および前記運転者が踏込んだ前記アクセル踏込み量および前記アクセル踏込み速度の少なくとも一方から求めた前記運転者が要求している運転者要求加速力を夫々演算する加速力演算部を有し、
前記走行ギヤ段選択制御部において、演算された前記要求ギヤ段加速力および前記現在ギヤ段加速力のうち前記運転者要求加速力により近い加速力を実現できる前記要求ギヤ段または前記現在ギヤ段が選択されるよう前記シフト変更閾値を変更するデュアルクラッチ式自動変速機。
【請求項6】
同心に配置された第1入力軸および第2入力軸と、原動機の回転駆動力を前記第1入力軸に伝達する第1クラッチおよび前記回転駆動力を前記第2入力軸に伝達する第2クラッチを有するデュアルクラッチと、前記第1入力軸に伝達された前記回転駆動力を変速して奇数変速段を成立させる第1シフト機構、および前記第2入力軸に伝達された前記回転駆動力を変速して偶数変速段を成立させる第2シフト機構と、変速指令が送出されると、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機から切り離される入力軸に対応するクラッチを切離する切離制御を行い、前記第1クラッチおよび前記第2クラッチのうち、前記第1入力軸および前記第2入力軸のうちの前記原動機に接続される入力軸に対応するクラッチを、前記原動機の回転数が前記接続される入力軸の回転数と同期すると接続する係合制御を行なう変速制御装置とを備えたデュアルクラッチ式自動変速機の前記変速制御装置の変速制御方法であって、
前記変速制御方法は、
前記運転者のアクセルの踏込みを検出するアクセル踏込検出ステップと、
前記アクセル踏込検出ステップによって前記アクセルの踏込みが検出されると、当該アクセルの踏込みが検出されたときの前記要求ギヤ段に向かってシフト中である前記第1シフト機構または前記第2シフト機構のシフト進行度を演算するシフト進行度演算ステップと、
前記演算されたシフト進行度が予め設定されたシフト変更閾値より大きい場合は前記第1シフト機構または前記第2シフト機構によって前記要求ギヤ段を成立するまで待ち前記要求ギヤ段に対応するクラッチを接続して走行し、前記演算されたシフト進行度が前記シフト変更閾値より小さい場合には前記第1シフト機構または前記第2シフト機構によって成立している前記現在ギヤ段に対応するクラッチを接続し走行することを可能にする走行ギヤ段選択制御ステップと、
を備えるデュアルクラッチ式自動変速機の変速制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−57334(P2013−57334A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−194738(P2011−194738)
【出願日】平成23年9月7日(2011.9.7)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月7日(2011.9.7)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
[ Back to top ]