
デュアル差動感知装置及びその方法
本発明はデュアル差動感知装置及びその方法を開示する。複数の感知器を含む感知装置と、感知情報を取る制御装置とを備え、前記感知情報中での各値は3つの感知器の信号に対応することを特徴とするデュアル差動感知装置を開示する。本発明は可とう性(可撓性)感知装置に応用でき、表示装置(ディスプレイ)に設置される。各感知器の信号の表示装置によるノイズ影響は感知器と表示装置との間の距離に対応し、感知情報中での各値の表示装置によるノイズ影響は感知器中の3つの感知器と表示装置との間のそれぞれ距離に対応する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タッチ感知方法及び装置に係り、特にデュアル差動感知方法及び装置に関する。
【背景技術】
【0002】
タッチディスプレイは、種々の電気装置に広く応用される。一般的方法はタッチパネルを使用し、タッチディスプレイ上に二次元のタッチ領域(接触領域)を定義し、タッチ板上で縦軸と横軸を走査し、感知情報を得り、そして指のような物体がタッチ板と接近又は接触することを判断する。例えば、米国特許第4639720号には静電容量方式タッチパネルが開示されている。
【0003】
感知情報はADC変換器(アナログ・デジタル コンバーター)で、複数の連続信号値に変わることができ、外部物体がタッチする又は接近する前後の信号値の変化量によって、触わられる又は接近される位置を決定できます。
【0004】
通常、タッチパネルを制御するコントローラーは先に基準値(ベースライン)として、外部物体がタッチする又は接近することがない時の感知情報を得る。例えば、静電容量方式タッチパネルにおいて、各々の導電線は、それぞれ基準値に相当する。コントローラーは、続きの感知情報と基準値とを比較し、外部物体がタッチするか、又は接近するかどうか決定して、さらに外部物体の位置を判断する。例えば、タッチパネルがタッチされない又は接近されないとき、続きの感知情報は基準値に対してゼロ又は約ゼロ(零値又は約零値)とすることである。感知情報は基準値に対してゼロ又は約ゼロとすることによって、外部物体がタッチするか、又は接近するかどうか決定する。
【0005】
図1Aで示すように、外部物体12(例えば指)はタッチ表示装置10の感知装置120と接触又は接近するとき、ある軸(例えばx軸)の上の感知器140の感知情報は図1Bで示すように信号値に変わり、指の形状に相当し、信号値は波形又は指プロフィール(輪郭)を示す。指プロフィールのピーク14の位置は、指による接触又は接近される位置を示す。
【0006】
ディスプレイが作動している時、その表面には、大量のノイズを発し、ディスプレイの表面に設置される感知装置がディスプレイのノイズ中で暴露し、そして、間違った判断をする。先行技術の1つの解決方法は、ディスプレイで発されるノイズを遮断するためにディスプレイと感知装置の間で奥遮断(シールド)層を付加することである。しかし、この奥遮断(シールド)層の追加は、追加費用と設計を必要とする。
【0007】
上記から、先行技術がまだ欠点を持つことは、明らかになった。これらの問題を解決するために、この業者は解決手段を求めても、また、適用の設計と構造とを提供していない。このように、これらの問題を解決する新しい技術は産業に必要である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第4639720号
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の一つの目的は、現在のタッチディスプレイの欠点を解決するために、デュアル差動感知装置及びその方法を提供することである。その解決しようとする課題は雑音(ノイズ)の干渉(影響)を大幅に減少することである。そして、本発明は産業に非常に実用性がある。
【0010】
本発明のもう一つの目的は、現在のタッチディスプレイの欠点を解決するために、デュアル差動感知装置及びその方法を提供することである。その解決しようとする課題は可撓性感知装置と表示装置との間にギャップ(間隙)があるとき、変形によるノイズ影響を最低になることである。
【課題を解決するための手段】
【0011】
本発明の目的と解決しようとする課題は以下の技術によって実現できる。本発明によれば、デュアル差動感知方法は複数の感知器を含む感知装置を提供する工程と、感知情報を取る工程とを含み、該感知情報中の各値はそれぞれ3つの感知器の信号に対応し、該感知情報によって感知装置上に外部物体による接近又は接触される位置は決定される。
【0012】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0013】
前述のデュアル差動感知方法は、一つのデュアル差動回路を提供する工程を更に含む。該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数個の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0014】
前述のデュアル差動感知方法には、前記感知情報中での各値は前記第二級差信号中の1つから生成され、前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0015】
前述のデュアル差動感知方法は、前記感知器中から一対の感知器の信号によって1つの差信号を生成する1つ又は複数の減算器と、1つ又は複数の測定時点で、前記差信号の各々を測定して1つの差動感知情報を生成する測定回路とを含む差動回路を提供する工程と、前記差動感知情報によって前記感知情報を生成する工程とを更に含み、そのうち、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0016】
前述のデュアル差動感知方法には、感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0017】
前述のデュアル差動感知方法には、前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0018】
前述のデュアル差動感知方法は、1つ又は複数の測定時点で、前記感知器の信号を測定して1つの最初感知情報を生成する1つの測定回路を提供する工程と、前記最初感知情報によって前記感知情報を生成する工程を更に含み、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0019】
前述のデュアル差動感知方法には、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差である。
【0020】
前述のデュアル差動感知方法には、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0021】
前述のデュアル差動感知方法には、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される。
【0022】
本発明の目的と解決しようとする課題は以下の技術によって実現できる。本発明によれば、デュアル差動感知装置は複数の感知器を含む感知装置と、感知情報を得る制御装置とを備え、前記感知情報中で各値はそれぞれ3つの感知器の信号に対応することを特徴とする。
【0023】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0024】
前述のデュアル差動感知装置はデュアル差動回路を更に備え、該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数個の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0025】
前述のデュアル差動感知装置には、前記感知情報中での各値は前記第二級差信号中の1つから生成され、前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0026】
前述のデュアル差動感知装置は、一つの差動回路を更に備え、該差動回路は1つ又は複数の減算器と、測定回路とを更に含み、前記減算器の各々は前記感知器中から一対の感知器の信号によって1つの差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、前記制御装置は前記差動感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0027】
前述のデュアル差動感知装置には、感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0028】
前述のデュアル差動感知装置には、前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0029】
前述のデュアル差動感知装置は、1つの測定回路を更に備え、前記測定回路は1つ又は複数の測定時点で、前記感知器の信号を測定し、1つの最初感知情報を生成し、前記制御装置は前記最初感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0030】
前述のデュアル差動感知装置には、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差である。
【0031】
前述のデュアル差動感知装置には、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0032】
前述のデュアル差動感知装置には、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される。
【0033】
本発明の目的と解決しようとする課題は更に以下の技術によって実現できる。本発明によれば、可撓性感知装置の感知方法は、表示装置上に可撓性感知装置を提供する工程と、感知情報を得る工程とを含み、そのうち、前記可撓性感知装置は複数の感知器を含み、前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する。
【0034】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0035】
前述の可撓性感知装置の感知方法は、デュアル差動回路を提供する工程を更に含み、該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数個の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0036】
前述の可撓性感知装置の感知方法には、前記感知情報中の各値は1つのノイズ値を含み、ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0037】
前述の可撓性感知装置の感知方法は、前記感知器中の一対の感知器の信号によって1つの差信号を生成する1つまたは複数の減算器と、1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成する測定回路とを含む差動回路を提供する工程と、前記差動感知情報によって前記感知情報を生成する工程を更に含み、そのうち、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0038】
前述の可撓性感知装置の感知方法には、感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0039】
前述の可撓性感知装置の感知方法には、前記感知情報中の各値はそれぞれ1つのノイズ値を含み、ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0040】
前述の可撓性感知装置の感知方法には、1つ又は複数の測定時点で、前記感知器の信号の各々を測定して1つの最初感知情報を生成する1つの測定回路を提供する工程と、前記最初感知情報によって前記感知情報を生成する工程とを更に含み、そのうち、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0041】
前述の可撓性感知装置の感知方法には、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する。
【0042】
前述の可撓性感知装置の感知方法には、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0043】
前述の可撓性感知装置の感知方法には、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による一つの零値範囲にある。
【0044】
本発明の目的と解決しようとする課題は更に以下の技術によって実現できる。本発明によれば、可撓性感知装置の感知システムは、表示装置と可撓性感知装置と制御装置を備え、前記可撓性感知装置は複数の感知器を含み、前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、前記制御装置は感知情報を得り、前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する。
【0045】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0046】
前述の可撓性感知装置の感知システムはデュアル差動回路を更に備え、該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって1つの第二級差信号を生成し、前記測定回路は1つまたは複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0047】
前述の可撓性感知装置の感知システムには、前記感知情報中の各値は1つのノイズ値を含み、ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0048】
前述の可撓性感知装置の感知システムは、差動回路を更に備え、該差動回路は1つまたは複数の減算器と、測定回路とを含み、前記減算器の各々は前記感知器中の一対の感知器の信号によって1つの差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、前記制御装置は前記差動感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0049】
前述の可撓性感知装置の感知システムには、前記感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0050】
前述の可撓性感知装置の感知システムには、前記感知情報中の各値は1つのノイズ値を含み、ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0051】
前述の可撓性感知装置の感知システムは、1つの測定回路を更に備え、前記測定回路は1つ又は複数の測定時点で、前記感知器の信号の各々を測定し、1つの最初感知情報を生成し、前記最初感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0052】
前述の可撓性感知装置の感知システムには、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する。
【0053】
前述の可撓性感知装置の感知システムには、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0054】
前述の可撓性感知装置の感知システムには、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による一つの零値範囲にある。
【0055】
本発明は先行技術に比べて顕著な利点と効果を持っている。本発明は、デュアル差動感知装置及びその方法を提供する。本発明によれば、複数の感知器を含む感知装置が提供する信号によって、感知情報を生成し、感知情報中での各値は3つの感知器の信号に対応する。本発明は可とう性(可撓性)感知装置に応用でき、表示装置(ディスプレイ)に設置される。各感知器の信号の表示装置によるノイズ影響は感知器と表示装置との間の距離に対応し、感知情報中での各値の表示装置によるノイズ影響は感知器中の3つの感知器と表示装置との間のそれぞれ距離に対応する。
【0056】
前記のように、ディスプレイが作動している時、その表面には、大量のノイズを発し、ディスプレイの表面に設置される感知装置がディスプレイのノイズ中で暴露し、そして、間違った判断をする。先行技術の解決方法の1つは、ディスプレイで発されるノイズを遮断するためにディスプレイと感知装置の間で奥遮断(シールド)層(rear shielding layer)を付加することである。しかし、この奥遮断(シールド)層の追加は、追加費用と設計を必要とする。
【0057】
特に感知装置とディスプレイ間のギャップ(間隙)があるとき、感知装置はタッチによる変形する可撓性感知装置であれば、感知装置の異なる位置に対する変形の異なる程度によってノイズ影響が異なる。
【発明の効果】
【0058】
本発明によれば、次の利点と効果がある:
1.最初感知情報(原始データ)に対し、デュアル差動感知情報は共同モードのノイズ影響を大幅に減少する。
2.前記可撓性感知装置と前記表示装置の間に奥遮蔽層がないでも、前記差動感知情報は変形に起因するノイズ影響を減少られ、間違った判断をすることを避けることができる。
【0059】
上記の説明は、本発明の技術の実施の概略だけである。本発明の技術手段を明らかになり、本発明の上記の目的と他の目的、特徴と利点を理解するために、本発明の好ましい実施例と取付けられた図面とともに下で提供される。
【図面の簡単な説明】
【0060】
【図1A】先行技術によるタッチ装置を示す図である。
【図1B】先行技術による信号値を示す図である。
【図1C】本発明の差を示す図である。
【図1D】本発明の二重差を示す図である。
【図1E】本発明の二重差を示す図である。
【図1F】本発明の感知装置を示す構造図である。
【図1G】本発明の計算システムを示す機能ブロック図である。
【図2A】本発明の駆動/検知ユニットと感知装置を示す構造図である。
【図2B】本発明の駆動/検知ユニットと感知装置を示す構造図である。
【図3A】本発明の検知ユニットを示す機能ブロック図である。
【図3B】本発明の検出器を示す回路図である。
【図3C】本発明の検出器を示す回路図である。
【図3D】本発明の検出器を示す回路図である。
【図3E】本発明の検出回路とADC回路を示す接続図である。
【図3F】本発明の検出回路とADC回路を示す接続図である。
【図3G】本発明の検出回路とADC回路を示す接続図である。
【図3H】本発明の検出回路とADC回路を示す接続図である。
【図3I】本発明の検出回路とADC回路を示す接続図である。
【図3J】本発明の検出回路とADC回路を示す接続図である。
【図4A】本発明の二進値の検出位置を示す図である。
【図4B】本発明の重心位置を検出する例を示す図である。
【図4C】本発明の重心位置を検出する例を示す図である。
【図4D】本発明の重心位置を検出する例を示す図である。
【図5】本発明の第一実施例のデュアル差動感知方法のフローチャートを示す図である。
【図6】本発明の第二実施例の可撓性差動装置の感知方法のフローチャートを示す図である。
【図7A】本発明の可撓性差動装置が圧力を受ける例を示す図である。
【図7B】本発明の可撓性差動装置が圧力を受ける例を示す図である。
【図7C】本発明の可撓性差動装置が圧力を受ける例を示す図である。
【発明を実施するための形態】
【0061】
本発明のある実施例は、下の詳細で記述される。しかし、以下の実施例に加えて、本発明は他の実施例にも適用でき、そして、本発明の範囲は以下の実施例に制限されない。そのうえ、説明のより良い理解ために、図面内の各々の部分にはその相対のサイズに従って作図することがなく、あるサイズとその他の関するサイズの割合は誇張され、そして、無関係な部分は省略される。
【0062】
〔感知情報〕
本発明には、感知情報がタッチ装置から提供され、タッチ装置上に一次元(1-D)、二次元(2-D)又は多次元の状態を表示する。感知情報は1つ又は複数の感知器から得られ、1つ又は複数のA/D変換器(ADC)で複数の連続信号値に変わり、感じる電荷、電流、電圧、容量又はその他電気特性の量又は変化量を表示する。感知情報を交替に、順に、平行に取る又は伝送することはでき、また、感知情報を1つ又は複数の信号に組み合わせることは当業者が通常知識から容易に実施できる。当業者とは一般的に知られている技術(周知技術、慣用技術を含む)が持っている人を意味する。以下にはそのとおり。
【0063】
当業者にとっては本発明において記述される感知情報が感知器の信号、ベースライン(基準値、例えば接触されないときの信号又は最初の信号)を引いた感知器の信号の結果、前記値がADCで変わる後の結果、前記値が他表示方式の値に変わる後の結果、を含むだけことではないこと知っている。言い換えれば、感知情報は信号の形で、記憶媒体(例えばレジスタ、メモリ、磁気ディスク、光ディスク)に記録される、電気信号から変わるか、電気信号に変わることができる状態で存在する。しかし、アナログ又はデジタル方式も含まれるが、これに限らず。
【0064】
感知情報は、異なる軸方向に関する2つの一次元(1-D)感知情報として提供されることができる。2つの一次元(1-D)感知情報は、タッチ装置上で第一軸(例えば縦軸)と第二軸(例えば横軸)に関する感知情報を意味する。それぞれ、第一軸および第二軸の方向で位置検知のために使われる。そして、第一軸および第二軸での一次元(1-D)位置を提供するが、さらにそれらを組み合わせて二次元の位置を構成する。そのうえ、2つの一次元(1-D)感知情報は、感知器の間の距離に基づく三角測量のために使われ、タッチ装置上で二次元の位置が測定されることもできる。
【0065】
感知情報は、1つの二次元(2-D)の感知情報であり、又は同じ軸上で複数の一次元(1-D)感知情報から成る二次元の感知情報である。1つの二次元の感知情報は、二次元の平面で信号の分布を意味することができる。例えば、縦軸に複数の一次元の感知情報又は横軸に複数の一次元の感知情報は、1つの信号マトリックスを意味する。分水嶺(watershed algorithm)というアルゴリズム又はその他画像処理方式によって位置の測定を行うことができる。
【0066】
本発明の一つの例に、タッチ装置上の感知区域は、少なくとも1つの第一感知器が感じる第一の二次元(2-D)の感知範囲と少なくとも1つの第二感知器が感じる第二の二次元(2-D)の感知範囲との重なり合う範囲を含む。当業者は感知区域が3つ以上の2-Dの感知範囲の重なり合う範囲でありうるとも認めるかもしれない。
【0067】
たとえば、一つの感知器の感知範囲は、二次元の感知範囲であり、カメラに基づく光学センサー(例えばCCDまたはCMOSセンサー)または表面弾性波検知による圧電センサーは、二次元の感知範囲中で一次元の感知情報を得る。この一次元の感知情報は複数の連続時点に感知情報から成ることができる。そして、異なる時点は角度、位置または範囲に対応する。そのうえ、一次元の感知情報は、時間間隔の中で得られる(例えばCCDまたはCMOSセンサーで)画像によって生成することができる。
【0068】
更に、たとえば、二次元の感知範囲は、複数の感知器の感知範囲から成る。たとえば、各々の赤外線の光受容器、静電容量方式又は電気抵抗方式検知の線状又は帯状の導電バーまたは磁気のU-形コイルの感知範囲は、1つの軸方向に沿う扇形又は帯状の感知範囲である。ラインセグメント(直線又は弧)上で同じ軸に配置される複数の感知器の感知範囲は、その軸の二次元の感知範囲を構成することができる。それは矩形または扇形の平面又は弧面の感知範囲である。
【0069】
本発明の好ましい例に、タッチ装置上の感知区域は、第一軸および第二軸の方向で複数の感知器で感知される二次元の範囲を含む。たとえば、自己容量方式(self-capacitive detection)検知を通して、駆動信号は複数の第一感知器に提供され、そして、第一感知器の第一の二次元の感知範囲で容量カップリング信号の変化を測定し、第一の一次元の感知情報が得られる。そのうえ、駆動信号は複数の第二感知器に提供され、そして、第二感知器の第二の二次元の感知範囲で容量カップリング信号の変化を測定し、第二の一次元の感知情報が得られる。
【0070】
本発明のもう一つの例に、タッチ装置上の感知区域は、複数の感知器が感じる二次元の感知範囲の複数の一次元の感知情報からなる二次元の感知情報を含む。たとえば、信号源が第一軸で順に駆動信号を感知器に印加するとき、順に第二軸で少なくとも1つの感知器の信号を測定し、または同時に複数(部分的に、または、すべて)の感知器の信号を測定し、そして、この軸上にある二次元の感知情報が得られる。そのうち、感知器は第二軸で少なくとも1つの隣接している感知器であり、または第二軸で少なくとも1つの隣接していない感知器である。たとえば、相互容量検知またはアナログのマトリックス電気抵抗検知において、複数の感知器は、各々の感知所を構成し、それぞれ感知所で感知情報を測定する。たとえば、複数の第一感知器(例えば複数の第一導電ワイヤ)と複数の第二感知器(例えば複数の第二導電ワイヤ)は重なり、複数の重なり合う領域を構成する。駆動信号が交替に第一感知器の各々順に印加されるとき、駆動信号が印加する第一感知器に対し、順に第二軸で少なくとも1つの感知器の信号を測定し、または同時に複数(部分的に、または、すべて)の感知器の信号を測定し、そして、第一感知器に対する一次元の感知情報が得られる。さらに、第一軸で一次元の感知情報を集めることによって、二次元の感知情報が得られる。本発明の例に、二次元の感知情報は、1つの画像と考えられていることができる。
【0071】
当業者は、本発明がタッチセンシティブディスプレイ、たとえば、前記の抵抗、容量、表面の音波方式検知付きまたは他のタッチ検知付きデバイス(またはタッチ感知装置と呼ばれる))に適用されると認めることができる。このように、タッチ表示装置又はタッチ装置で得られる感知情報は、タッチセンシティブ情報と考えられていることができる。
【0072】
本発明の一つの例に、タッチ装置は、異なる連続時点に、連続信号を使う。つまり、1つの感知器で、または、複数の感知器で同時に測定される複合信号は使用される。たとえば、タッチ装置は電磁式タッチ装置であり、電磁式タッチ装置上のコイルが連続的に発する電磁波は電磁ペンの上で1つ以上の感知器で感じられ、連続的に1つの信号を作る。この信号は、それからADCによって複数の連続信号値に変換される。あるいは、電磁ペンで発される電磁波、あるいは、電磁式タッチ装置から反射される電磁波はタッチ装置上の1つ以上の感知器(コイル)で感じられ、感知情報が得られる。
【0073】
〔タッチ関連情報〕
外部物体(例えば指)がタッチ装置と接触するか、接近するとき、電気特性または変化は外部物体が接触する相対位置の感知情報によって生成する。電気特性または変化がより大きいほど、それは外部物体のセンター(例えば質量重心、重心又は幾何中心)により間近である。それがデジタルであるかアナログであるかどうかにかかわらず、連続の感知情報は複数の連続の値によって構成されると、考えられている。外部物体のセンターは、1個、2個の値の間で対応するかもしれない。本発明では、複数個の連続の値は、空間的に、または、時間的に連続的でありうる。
【0074】
本発明により提供される第一種類の1-D感知情報は、複数の連続信号値の形であり、また、一つの時間間隔内で、複数の感知器で感じられる信号値、連続の時間間隔内で、一つの感知器で感じられる信号値、又は一つの時間間隔内で、一つの感知器での異なる場所の信号値である。感知情報を信号値に表す過程で、それぞれの感知器、時間間隔または位置による信号は信号値に順に変換される、あるいは、感知情報の一部または全体は得られ、その後、各々の信号値はそれから分析される。外部物体が感知装置と接触するか、接近するとき、1-D感知情報の連続信号値は図1Bで示すように、接触される位置は外部物体の感知情報のピーク14に対応し、ピーク14は2個の信号値の間に存在する。前記されるように、本発明は感知情報の形を制限しない。信号値は、感知器の信号のもう一つの形でありうる。説明の簡潔さのために、下記の本発明は、信号値の実施様態で記述される。当業者は、信号値の実施様態から、信号の実施様態を明らかに理解することができる。
【0075】
本発明により提供される第二種類の1-D感知情報は、複数の連続の差の形であり、前記信号値に対し、差の各々は一対の信号値の差であり、かつ複数の連続の差で示す感知情報は差動感知情報として考えられている。本発明では、差動感知情報は感知するとき直接に得られる。例えば、同時に、又は連続的に複数の信号を取り、差の各々は一対の感知器、時間間隔または位置に対応する差動信号によって生成する。差動感知情報は先に複数の信号値の原始感知情報を生成した後、原始感知情報によって生成する。前記のように、本発明は感知情報の形を制限しない。差は、差動信号のもう一つの形である。当業者は、差の実施様態から、差動信号の実施様態を明らかに理解することができる。
【0076】
本発明の例に、差は一対の隣接しているか隣接していない信号値の間の差であり、例えば、各信号値とその前の信号値の間の差であり、又は信号値とその後の信号値の差である。本発明のもう一つの例に、差は非隣接した信号値の間の差である。外部物体がタッチ装置と接触するか、接近するとき、1-D感知情報の連続差は図1Cで示すように、外部物体の位置は外部物体の感知情報の零交差箇所15に対応し、零交差箇所15は2個の信号値の間に存在する。本発明の一例に、タッチ装置上で、各差の相対位置は2個の信号値の間である。
【0077】
本発明により提供される第三種類の1-D感知情報は、複数の連続のデュアル差(二重差)の形であり、前記信号値又は差に対し、デュアル差の各々れは第一対の信号値の差と第二対の信号値の差との和又は差であり、つまり、二対の信号値の差の和又は差である。本発明の一つの例に、第一対の信号値の差は第一差であり、第二対の信号値の差は第二差であり、そして、デュアル差は第一差と第二差との差であり、そのうち、第一差と第二差は前の信号値から後の信号値を引いた差である。本発明のもう一の例に、第一対の信号値の差は第一差であり、第二対の信号値の差は第二差であり、そして、デュアル差は第一差と第二差との和であり、そのうち、第一差と第二差の1つは前の信号値から後の信号値を引いた差であり、もう1つは後の信号値から前の信号値を引いた差である。例えば、二対の信号値は順に第一信号値、第二信号値、第三信号値、第四信号値を含み、これに対し、4つの信号値に対するデュアル差は(第二信号値−第一信号値)+(第三信号値−第四信号値)、(第二信号値−第一信号値)−(第四信号値−第三信号値)、(第一信号値−第二信号値)+(第四信号値−第三信号値)、又は(第一信号値−第二信号値)−(第三信号値−第四信号値)である。その上、連続の複数のデュアル差からなる感知情報はデュアル差動感知情報として考えられている。本発明では、デュアル差が信号値または差を生成した後、生成するが、これに限らず。また、感知情報が提供されるとき二対の信号値を引算する後の和又は差を取り、二対の信号値の差の和又は差に相当するデュアル差動信号を提供することができる。前記のように、本発明は感知情報の形を制限しない。デュアル差は、感知器のデュアル差動信号のもう一つの形でありうる。当業者は、デュアル差の実施様態から、デュアル差動信号の実施様態を明らかに理解することができる。
【0078】
本発明の一つの例に、外部物体がタッチ装置と接触するか、接近するとき、二対の信号値は3個の隣接したか隣接していない信号値からなる。本発明の一つの例に、前2つの信号値の差と後2つの信号値の差それぞれは第一差と第二差であり、且つデュアル差は第一差と第二差との差である。そのうち、第一差と第二差は前の信号値から後の信号値を引いた差である。本発明のもう一つの例に、前2つの信号値の差と後2つの信号値の差それぞれは第一差と第二差であり、且つデュアル差は第一差と第二差との和である。そのうち、第一差と第二差の1つは前の信号値から後の信号値を引いた差であり、もう1つは後の信号値から前の信号値を引いた差である。例えば、二対の信号値は順に第一信号値、第二信号値、第三信号値を含み、3個の信号値に対するデュアル差は(第二信号値−第一信号値)+(第二信号値−第三信号値)、(第二信号値−第一信号値)−(第三信号値−第二信号値)、(第一信号値−第二信号値)+(第三信号値−第二信号値)又は(第一信号値−第二信号値)−(第二信号値−第三信号値)である。二対の信号値は3個の隣接した信号値から成るとき、外部物体がタッチ装置と接触するか、接近するとき、1-D感知情報の連続のデュアル差は、図1Dで示すように、外部物体の位置は外部物体の感知情報の中央ピーク16に対応し、中央ピーク16は2個の信号値の間に存在する。二対の信号値は3個の隣接していない信号値から成るとき、外部物体がタッチ装置と接触するか、接近するとき、1-D感知情報の連続のデュアル差は、図1Eで示すように、外部物体の位置は外部物体の感知情報の中央ピーク17に対応し、中央ピーク17は2個の信号値の間に存在する。
【0079】
本発明では、各々の感知器、時間間隔又は位置に対応する感知情報は感知器から感知した信号であり、この信号はアナログであるとき、ADC変換器(A/Dコンバーター、アナログ・デジタルコンバーター)によってデジタルの信号になる。従って、前記差も一対の信号の差であり、例えば、一対の信号を差動増幅器で引算した後の転換値が挙げられる。同様に、前記デュアル差は二対の信号を差動増幅器で引算した後加算又は引算の転換値である。当業者には、本発明の差とデュアル差が信号又は信号値から生成されることを含むと認めることができるが、これに限らず、ハードウェア又はソフトウェアで実施過程の記録(電気記録、磁気記録、光学記録)、信号又は信号値の一時的な状態も含むと認めることができる。
【0080】
言い換えれば、感知情報は感知器で又は感知器の間の信号、差動信号(例えば、一対の信号の差)、デュアル差動信号(例えば、二対の信号の差の和又は差)であり、信号値、差、デュアル差(ADCによって変換後の信号、差、デュアル差)はもう一つの形でありうる。説明の簡便のために、本発明の説明には、タッチ関連情報は外部物体が接触するか、接近する感知情報であり、例えば、タッチ関連情報として、原始タッチに関する感知情報、差動タッチ関連感知情報、デュアル差動タッチ関連感知情報が挙げられる。
【0081】
当業者は、差又はデュアル差において零交差箇所が少なくとも1つの正の値と少なくとも1つの負の値との間にあり、つまり、一対の正と負の値との間にある。外部物体が接触と接近に対する差又はデュアル差は連続の少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせである。少なくとも1つの正の値と少なくとも1つの負の値との間には少なくとも1つの零値が挿入されている。ほとんどの場合、外部物体が接触と接近に対する差又はデュアル差は連続の複数の正の値と複数の負の値との交互組み合わせであり、正と負の値との間にある零交差箇所は少なくとも1つの零値であり、又は2個の値(正の値と負の値)の間にある。
【0082】
比較すると、タッチ関連の信号値は、複数の連続の非ゼロ値(零ではない)またはその他非ゼロ値に隣接しない独立の非ゼロ値も、を含む。場合によっては、その他非ゼロ値に隣接しない独立の非ゼロ値は雑音(ノイズ)によって生成するかもしれない。そして、それはしきい値(閾値)によってまたはその他方法で確認されて、無視しなければならない。
【0083】
雑音(ノイズ)が大きいとき、外部物体が接触と接近に類似した零交差箇所が生じる恐れがある。従って、本発明の一つの例に、零値の範囲内の値は零値(ゼロ値)と認められる。外部物体が接触と接近に対する差又はデュアル差は連続の複数の正のしきい値により大きい値と負のしきい値により小さい値との交互組み合わせであり、正のしきい値により大きい値と負のしきい値により小さい値との間にある零交差箇所は少なくとも1つの零値であり、又は2個の値(正の値と負の値)の間にある。
【0084】
上述をまとめると、差動タッチ関連感知情報とデュアル差動タッチ関連感知情報は零交差箇所を含む連続の少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせである。そのうち、零交差箇所は少なくとも1つの零値であり、又は2個の値(正の値と負の値)の間にある。言い換えれば、本発明には、差動タッチ関連感知情報がデュアル差動タッチ関連感知情報中で正の値と負の値との間にある連続の複数の零値を零交差箇所とし、又は1つの零値を零交差箇所として考えられる。
【0085】
本発明の一つの例に、タッチ関連感知情報はまず、少なくとも1つの正の値又は負の値から始め、零交差箇所を含む連続の少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせが捜され、そのうち、零交差箇所は少なくとも1つの零値であり、又は少なくとも1つの正の値と少なくとも1つの負の値との間にある。タッチ関連の差動感知情報において、少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせは対称的に起こる。しかし、タッチ関連のデュアル差動感知情報において、少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせは対称的に起こらない。本発明のもう一つの例に、タッチ関連の感知情報は連続の非零値(ゼロではない)であり、例えば、連続の複数の非零の信号値が挙げられる。
【0086】
前記少なくとも1つの正の値は正の値からなる群であり、少なくとも1つの正の値を含む。同様に、前記少なくとも1つの負の値は負の値からなる群であり、少なくとも1つの負の値を含む。従って、前記交互組み合わせは正の値からなる群と負の値からなる群との組み合わせであり、又は3個以上の正の値からなる群と負の値からなる群との交互組み合わせである。本発明の一つの例に、零個、1個又は多個の正の値からなる群と負の値からなる群との間に少なくとも1つの零値がある。
【0087】
〔システムフレームワーク〕
より明らかに、本発明の感知情報を発生する方法について説明するために、本発明は例として静電容量タッチ装置を使い、そして、当業者は電気抵抗、赤外線、表面の音波または光学的タッチ装置に応用することがすぐに理解できると考えられる。
【0088】
図1Fを参照して、本発明は、位置検知装置100を提供する。図1Fで示すように、位置検知装置100は感知装置120と駆動/検知ユニット130を含む。感知装置120は、感知層を持つ。本発明の一つの例に、感知層は、第一感知層120Aと第二感知層120Bを含む。第一感知層120Aと第二感知層120Bそれぞれは、複数の感知器140を有し、そのうち、第一感知層120Aの複数の第一感知器140Aと第二感知層120Bの複数の第二感知器140Bは重なる。本発明のもう一つの例に、複数の第一感知器140Aと第二感知器140Bは同じ平面の感知層に配置されることができる。駆動/検知ユニット130は複数の感知器140の信号によって感知情報を生成する。例えば、自己容量を検知する場合、駆動された感知器140を測定し、また、相互容量を検知する場合、駆動/検知ユニット130で直接に駆動されない一部の感知器140を測定する。そのうえ、感知装置120は表示装置110上に配置され、感知装置120と表示装置110の間に奥遮蔽層(図示せず)が挿入されることができる。また、感知装置120と表示装置110の間に奥遮蔽層(図示せず)が挿入されてないこともできる。
【0089】
本発明の位置検知装置100は図1Gで示すようにコンピューティングシステムに適用されることができる。それはコントローラー160とホスト170を含む。コントローラーは、操作的に感知装置120(示されない)を結合させるために、駆動/検知ユニット130を含む。そのうえ、コントローラー160はプロセッサー161を含み、駆動/検知ユニット130は感知情報を生成し、その感知情報はメモリ162に保存され、プロセッサー161でアクセスできる。さらに、ホスト170はコンピューティングシステムの主体部であり、主に中央処理装置171と、中央処理装置171でアクセスされることができる記憶装置173と、演算結果を表示するための表示装置110を含める。
【0090】
本発明のもう一つの例に、コントローラー160とホスト170の間には伝送インターフェースがある。コントローラーは、伝送インターフェースによってデータをホストに送る。当業者には伝送インターフェースがUART、USB、I2C、Bluetooth(登録商標)、WiFi等有線または無線伝送インターフェースを含むことが知っているが、これに限定されるものではないかもしれないと認めることができる。本発明の一つの例に、送られるデータは位置(例えば座標)、識別結果(例えばジェスチャコード)、命令、感知情報又はコントローラー160により提供される情報である。
【0091】
本発明の一つの例に、感知情報はプロセッサー161の制御で生成される最初の感知情報であり、それの位置分析をホスト170で、行う。例えば、位置分析、ジェスチャ識別、命令識別を行う。本発明のもう一つの例に、感知情報はプロセッサー161で先に分析を行い、そして、識別した位置、ジェスチャ、命令等をホスト170に転送する。本発明はこの例に対する制限をしない、そして、当業者はコントローラー160とホスト170の間でその他インタラクションをすぐに理解することができる。
【0092】
図2Aを参照して、本発明の一つの例において、駆動/検知ユニット130は、駆動ユニット130Aと検知ユニット130Bを含むこともできる。感知装置120の複数の感知器140は、複数のワイヤによって操作的に駆動/検知ユニット130に結合する。図2Aの例に、駆動ユニット130Aと検知ユニット130Bは、ワイヤW1によって感知器140Aに、そして、ワイヤW2によって感知器140Bに操作的に結合する。
【0093】
たとえば、自己容量検知において、駆動ユニット130AはワイヤW1を通して、第一期間に、順に、または、同時にすべての感知器140Aを駆動させる、あるいは、同時に感知器140Aのいくつかをバッチで駆動させる。検知ユニット130BはワイヤW1を通して、感知器140Aの信号によって第一軸で感知情報(1-D感知情報)を生成する。同様に、駆動ユニット130AはワイヤW2を通して、第二期間に、順に、または、同時にすべての感知器140Bを駆動させる、あるいは、同時に感知器140Bのいくつかをバッチで駆動させる。検知ユニット130BはワイヤW2を通して、感知器140Bの信号によって第二軸で感知情報(1-D感知情報)を生成する。
【0094】
たとえば、相互容量検知において、駆動ユニット130AはワイヤW2を通して、第一期間に、順にすべての感知器140Bを駆動させる。感知器140Bの各々はそれぞれ駆動されるとき、検知ユニット130BはワイヤW1を通して、感知器140Aの信号によって駆動される感知器における第一軸での1-D感知情報を生成する。それら第一軸での1-D感知情報は第一軸での2-D感知情報(又は画像)になる。同様に、駆動ユニット130AはワイヤW1を通して、第二期間に、順にすべての感知器140Aを駆動させる。感知器140Aの各々はそれぞれ駆動されるとき、検知ユニット130BはワイヤW2を通して、感知器140Aの信号によって駆動される感知器における第二軸での1-D感知情報を生成する。それら第二軸での1-D感知情報は第二軸での2-D感知情報(又は画像)になる。そのうえ、駆動ユニット130Aと検知ユニット130Bは、経路132を通して、信号を提供することによって、同期することができる。経路132の信号は、プロセッサー1600で提供されることができる。
【0095】
図2Bを参照して、感知装置120は一つの軸だけに関する二次元の感知情報を生み出すこともできる。この例では、感知器140BはワイヤW2によって順に駆動される。そして、各々の感知器140Bがそれぞれ駆動されるとき、検知ユニット130BはワイヤW1を通して、感知器140Aの信号によって駆動される感知器における1-D感知情報を生成する。それら1-D感知情報は2-D感知情報(又は画像)を構成する。
【0096】
言い換えれば、本発明の位置検知装置100は、2つの軸の1-D感知情報または2つの軸の2-D感知情報を生じる機能を備え、あるいは、2つの軸の1-D感知情報と2-D感知情報を生じる機能を備える。また、本発明の位置検知装置100は1つの軸の2-D感知情報を生じることができる。本発明は静電容量方式位置検知装置を含むが、これに限定されるものではないかもしれない。例えば、当業者は電気抵抗方式、静電容量方式、赤外線方式、表面の音波方式、光学方式ようなタッチ装置の応用はできることを容易に理解できる。
【0097】
図3Aを参照して、前記検知ユニット130Bは、ワイヤ(例えばW1)によって、感知装置に操作的に結合する。操作的に結合することはスイッチング回路310で実施されることができる。そして、スイッチング回路はは一つ以上の電気素子(例えばマルチプレクサやスイッチ)からなる。当業者は、他のスイッチング回路の使用を理解することができる。感知器140の信号は、検出回路320で感知されることができる。検出回路320での出力がアナログ信号であるとき、ADC回路330で変わり、感知情報SIが得られる。感知情報SIはアナログまたはデジタルでありうる。本発明の好ましい例に、感知情報SIはデジタルである、しかし、本発明は上記の例に限られていないである。当業者は、検出回路320とADC回路330が一つ以上の回路で集積されることができると認めることができる。
【0098】
検出回路320は一つ以上の検出器から成ることができる。そして、各々が少なくとも1つの感知器140から信号を受け取って、出力を生み出す。検出器は、図3B乃至3Dで示される検出器340、350と360でありうる。
【0099】
本発明の一つの例に、感知器140の信号の検出は、積分器によって成し遂げられることができる。当業者は、例えばADCのように他の回路が電気特性(例えば電圧、電流、容量、インダクタンス等)を測ることができると理解できる。積分器は増幅器Cintによって実行されることができる。そして、それは1つの入力と(例えば図3Bの積分器322で示すように)または一対の入力と(例えば図3Cと3Dの積分器324で示すように)、出力とを含む。出力信号はADC回路330で感知情報SIの値を生み出し、これらの値の各々はリセット信号(例えば図3B乃至3Dで示されるリセット信号Sreset)によって制御されることができる。
【0100】
本発明のもう一つの例に、感知器140の信号は、一対の半周期によって異なる交流(AC)信号である。このように、感知器140の信号の検知も、異なる半周期で変わる。たとえば、感知器140の信号は前の半周期に検知され、そして、感知器140の逆信号は後の半周期に検知され、または、その逆も同じ検知される。したがって、図3Bと3Cで示すように、感知器140の信号の検知は、同期信号Ssyncによって制御されることができる。同期信号Ssyncと感知器140の信号は、同期においてあるか、同じ周期を持っている。たとえば、同期信号Ssyncは、一つ以上のスイッチ(例えばスイッチング回路321、323、325)を制御し、基準点P1とP2の間でスイッチングし、前の半周期に感知器140の信号を検知し、そして、後の半周期に感知器140の逆信号を検知する。図3Bの中で、逆信号はインバータCinvによって提供される。
【0101】
本発明のさらにもう一つの例に、感知器140の信号の検知は、少なくとも1つの周期で少なくとも所定の時間間隔(または位相)に実行される。検知は、前の半周期中で少なくとも1つの時間間隔にと後の半周期中で少なくとも1つの時間間隔に実行され、あるいは前の半周期又は後の半周期だけでの少なくとも1つの時間間隔に実行される。本発明の好ましい例に、少なくとも、1つの周期中で信号が好ましい少なくとも1つの時間間隔を検知間隔として走査する。そのうち、検知間隔は他の時間間隔に比べ、ノイズ影響が少ない間隔である。検知間隔の走査(スキャン)は、少なくとも1つの周期で各間隔に少なくとも1つの感知器の信号の検知で判断されることができる。検知間隔を決定すると、すぐに、感知器140の信号の検知はその検知間隔だけに実行される。そして、これは信号(例えば図3B乃至3Dでイネーブル信号Senable)によって制御されることができる。
【0102】
本発明は、少なくとも1つの感知器140の信号に基づく、感知情報SIの値を生み出す。本発明の一つの例に、感知情報SIは、複数の信号値から成る。図3Bで示すように、入力311は信号を検知するために感知器140に操作的に結合し、そして、感知情報SIの信号値はADC回路330によって生成する。本発明のもう一つの例に、感知情報SIは、複数の差から成る。図3Cで示すように、一対の入力312と313は差動信号を検知するために一対の感知器140に操作的に結合し、、そして、感知情報SIの差(または単差)はADC回路330によって生成する。本発明のさらにもう一つの例に、感知情報SIは、複数の二重差から成る。本発明のもう一つの例に、複数の二重差から成る。図3Dで示すように、3つの入力314、315と316は二重差動信号を検知するために3個の感知器140に操作的に結合し、そして、感知情報SIの二重差はADC回路330によって生成する。二重差動信号は、一対の差動信号の差から生成し、各々の差動信号は、一対の感知器の信号に基づいて生成する。言い換えれば、二重差動信号は第一対の感知器の信号と第二対の感知器の信号に基づいて生成し、そして、第一対の感知器は3つの感知器中で前2つの感知器であり、且つ第二対の感知器は3つの感知器中で後2つの感知器であり、そのうち、これらの3つの感知器は隣接していることができるか、隣接していないこともできる。
【0103】
本発明の好ましい例に、検出回路320は複数の検出器を含む。そして、それは同時に、感知情報SIの全てまたは一部の値を生み出すことができる。図3E乃至3Jで示すように、検出回路320は検出器340、350または360からなることができる。検出器の出力は、それから、ADC回路330で感知情報SIの値に変わる。
【0104】
ADC回路330は、少なくとも1つのADCを含む。図3E、3G、3Iで示すように、各々のADCは、1つの検出器だけの出力に基づく感知情報SIの値を出力する。あるいは、図3F、3H、3Jで示すように、ADCは順番にいくつかの検出器の出力に基づく感知情報SIの値を出力する。感知情報SIの値が、平行に生成することができるか、直列であることができる。本発明の好ましい例に、感知情報SIの値は直列に生成し、そして、それはスイッチング回路370で達成されることができる。たとえば、図3E、3G、3Iで示すように、順番に複数のADCから感知情報SIの値を出力する。または、図3F、3H、3Jで示すように、順番に複数の積分器の出力を一つのADCに送ることによって、感知情報SIの値を生み出す。
【0105】
したがって、本発明の例において、複数の感知器の信号に基づく、複数の信号値を有する感知情報SIを生成する。図3B、3Eと3Fで示すように、各々の信号値は、1つの感知器から信号に基づいて生成する。そこで、本発明のもう一つの例に、複数の感知器の信号に基づく、複数の差を有する感知情報SIを生成する。図3C、3Gと3Hで示すように、各々の差は、一対の感知器から信号に基づいて生成する。本発明のさらにもう一つの例に、複数の感知器の信号に基づく、複数の二重差を有する感知情報SIを生成する。図3D、3Iと3Jで示すように、各々の二重差は、3つの感知器から信号に基づいて生成する。
【0106】
図3E〜3JFの中で、検出器を接続するワイヤは、ワイヤW1とワイヤW2を含むが、これに限定されるものではないかもしれない。積分器とワイヤ間の接続は、直接的または間接的で良く、図3Aで示すように、スイッチング回路によっても良い。本発明の一つの例に、感知情報SIの値は少なくとも検出回路320の検出器で複数回検出によって生成する。検出回路320は、検出ために検出器のいくつかをスイッチング回路310によって選ぶ。そのうえ、選ばれた検出器だけは、駆動ユニット130Aによって駆動される(たとえば、自己容量検知において)。さらに、選ばれた検出器と選ばれた検出器に隣接した若干の検出器だけは、駆動ユニット130Aによって駆動されることも良い。
【0107】
本発明の第一範例に、感知情報はデュアル差動回路で得られることができる。そして、図3D、3Iと3Jで示すように、デュアル差動回路は第一級差動回路、第二級差動回路と測定回路を含む。
【0108】
第一級差動回路は、一対または複数の第一減算器(例えばスイッチング回路325の差動増幅器)を含む。第一減算器の各々は、これらの感知器で一対の感知器によって第一級差動信号を生み出す。
【0109】
そのうえ、第二級差動回路は、一対または複数の第二減算器(例えば積分回路324の積分器)を含む。第二減算器の各々は、これらの第一級差動信号で一対の第一級差動信号によって第二級差動信号を生み出す。
【0110】
さらに、測定回路は図3Aで示すように、ADC回路であり、また、図3Dで示すように積分器324とADC回路との組合せからなる。または、測定回路は図3Iで示すように、複数の積分器324、複数のADC回路とスイッチング回路370との組合せからなる。また、図3Dまたは図3Jで示すように、これらの第二級差動信号は測定回路にとって複数の時点に測られる、あるいは、図3Iで示すように、これらの第二級差動信号は測定回路にとって一つの時点に測られる。
【0111】
本発明の図3D、3Iと3Jで、差動積分器324によって信号の引算と測定を同時に行う。信号の測定はADC回路でデジタル信号を生み出すことを更に含み、しかし、これらに限られていない。前記関連の図面と説明は単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0112】
前記デュアル差動回路で、感知情報の各々の値がこれらの第二級差動信号の1つによって生成し、且つ第二級差動信号の各々は一対の第一級差動信号の第一差信号と第二差信号によって生成し、そのうち、第一差信号は、それらの感知器で第一感知器と第二感知器の信号によって生成し、また、第二差信号は、それらの感知器で前記第二感知器と第三感知器の信号によって生成する。言い換えれば、感知情報の各々の値は、これらの感知器で3つの感知器の信号に対応する。
【0113】
本発明の第二範例に、感知情報は差動回路で得られることができる。そして、図3C、3Gと3Hで示すように,差動回路は一つまたは複数の減算器と測定回路を含む。これらの減算器に、各々の減算器は、一対の感知器の信号によって、差動信号を生み出す。測定回路は、これらの差動信号を測って、差動感知情報を生成し、そのうち、感知情報の各値は差動感知情報の一対の値の差である。
【0114】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Cまたは図3Hで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Gで示すように、これらの第二級差動信号は一つの時点に測定される。
【0115】
図3C、3Gと3Hで、減算器と測定回路の一部は、積分器324にとって実施されることができる。前記図面と説明は、単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0116】
そのうえ、感知情報の各値は第一差と第二差との差であり、第一差信号はそれらの感知器で第一感知器と第二感知器との信号によって生成され、且つ第二差信号はそれらの感知器で前記第二感知器と第三感知器との信号によって生成される。言い換えれば、感知情報の各値は、これらの感知器で3つの感知器の信号に対応する。
【0117】
本発明の第三範例に、図3B、3Eと3Fで示すように,感知情報は測定回路で得られることができる。測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの感知器の信号を測ってから、最初感知情報を生成する。感知情報は、最初感知情報によって生成し、そのうち、感知情報の各値は最初感知情報の3個の値から生成する。
【0118】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Bまたは図3Fで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Eで示すように、これらの第二級差動信号は一つの時点に測定される。
【0119】
感知情報の各値は第一差と第二差との差又は和であり、そのうち、第一差は最初感知情報の3個の値で前2つの値の差であり、且つと第二差は最初感知情報の3個の値で後2つの値の差である。言い換えれば、最初感知情報の3個の値はそれぞれ第一値、第二値と第三値であり、感知情報の各値は(第二値−第一値)−(第三値−第二値)、(第一値−第二値)−(第二値−第三値)、(第二値−第一値)+(第二値−第三値)又は(第一値−第二値)+(第三値−第二値)である。前記最初感知情報の各値はこれらの感知器の一つの信号によって生成される。言い換えれば、感知情報の各値は最初感知情報の3つの感知器の信号に対応する。
【0120】
本発明の一つの例に、感知情報で各々のタッチ関連の感知情報は2つの零交差箇所を持って、そして、外部物体によって接触されるか、接近される位置はタッチ関連の感知情報にとって判断される。本発明のもう一つの例に、タッチ関連の感知情報は情報が始めである部分又は最後部分で配置される。外部物体はタッチ装置の検知できる区域の外縁だけと接触するか、接近するとき、2つの零交差箇所がない、そして、例外処理は必要とされる。
【0121】
さらに、前記時点は、一つ以上のクロックまたは一つ以上のクロックの部分を経過することを含むが、これに限定されるものではないかもしれない。
【0122】
さらにまた、前記感知情報の獲得と生成は、コントローラー160で実行されることができる。前記デュアル差動回路、差動回路と測定回路は、コントローラー160で実行されることができる。
【0123】
本発明では、感知器は複数の導電性シートと接続ワイヤからなり、例えば、ワイヤで一緒につながれる一組の菱形又は四角形導電性シートからなることができる。構造的に、第一感知器140Aと第二感知器140Bの導電性シートは、異なるか同じ平面に配置されるかもしれない。たとえば、第一感知層120Aと第二感知層120Bの間には絶縁層又はピエゾ抵抗(piezoresistive)層を介し、ピエゾ抵抗(piezoresistive)層は異方性の導電性ゲルから作られる。さらに、たとえば、第一感知器140Aと第二感知器140Bの導電性シートは略同じ平面に配置される。第一感知器140Aの接続ワイヤは第二感知器140Bの接続ワイヤを越える。そのうえ、第一感知器140Aの接続ワイヤと第二感知器140Bの接続ワイヤの間にはパッドが配置されることができる。これらのパッドは、絶縁材質であるか、ピエゾ抵抗(piezoresistive)な材料でできていることがありうる。
【0124】
このように、本発明の例において、各々の感知器は1つの感知範囲に対して役割があり、感知範囲は複数の感知器で感知される。これらの感知器は複数の第一感知器と複数の第二感知器を含み、これらの第一感知器の感知範囲は互いと平行に配置され、かつ、これらの第二感知器の感知範囲は互いと平行に配置される。これらの第一感知器および第二感知器の平行感知範囲は交差し、1つの交差マトリックスを構成する。たとえば、これらの第一感知器および第二感知器は赤外線受信器であり、水平にと垂直に配置される平行感知範囲を走査する。そのうち、水平にと垂直に配置される平行感知範囲は1つの交差マトリックスを構成する。また、例えば、前記水平にと垂直に配置される平行感知範囲は互いに交差的に配置される静電容量式または電気抵抗式複数の感知器にとって実施されることができる。
【0125】
〔感知情報の変換〕
前記感知情報の信号値、差と二重差は、お互いに変わることができる。本発明により提供される第一の変換方法では、連続の信号値が連続の差に変わり、各々の差は一対の隣接したか非隣接した信号値の差である。
【0126】
本発明により提供される第二の変換方法では、連続の信号値は連続の二重差に変わり、各々の二重差は二対の信号値の差の和または差である。
【0127】
本発明により提供される第三の変換方法では、連続の差は、連続の信号値に変わり、各々の差はその前又は後の差を加えて、それに対応する信号値を取り、それによって連続の信号値を造る。
【0128】
本発明により提供される第四の変換方法では、連続の差は、連続の二重差に変わり、各々の二重差は、隣接したか非隣接した一対の差の和(合計)または差である。
【0129】
本発明により提供される第五の変換方法では、連続の二重差は連続の差に変わり、各々の二重差にその前又は後のすべての二重差を加えて、それに対応する信号値を取って、それによって連続の差を造る。
【0130】
本発明により提供される第六の変換方法では、連続の二重差は、連続の信号値に変わる。本発明の一つの例に、各々の二重差にその前のすべての二重差を加えて、それによって連続の差を造って、さらに、各々の差からその後のすべての差を引いて、それによって連続の信号値を造る。本発明のもう一つの例に、各々の二重差からその前のすべての二重差を引いて、それによって連続の差を造って、さらに、各々の差にその後のすべての差を加えて、それによって連続の信号値を造る。
【0131】
対応する信号値または差を生成するために、前記各々の二重差にその前又は後のすべての差又は二重差を加えることは、前へ又は奥への加算又は引算の蓄積方式によって実行される。
【0132】
前記変換方法は1-D感知情報の変換を含むが、これに限定されるものではないかもしれない、当業者は上記の変換方法が二次元の感知情報または三次元以上(またはさらに次元の)感知情報に適用されることができると認めることができる。そのうえ、当業者は、上記の変換方法が前記コントローラー160またはホスト170によって実行されることができると認めることができる。
【0133】
したがって、本発明の一つの例において、第一形式の感知情報(例えば1-Dまたは2-Dの感知情報)を感知し、位置分析のために感知情報に変わる。本発明のもう一つの例に、感知した第一形式の感知情報を第二形式の感知情報に変わる。それから、第二形式の感知情報は位置分析のために感知情報に変わる。たとえば、連続の二重差は連続の信号値に変わる。
【0134】
〔一次元位置分析〕
本発明により提供される第一種類の位置分析は、外部物体に対応する位置として感知情報で複数の差に基づく零交差箇所(zero-crossing)の位置を分析する。当業者は位置分析が外部物体によるタッチ又は接近の決定ことを含むが、これに限定されるものではないかもしれないと認めることができる。つまり、外部物体に対応する位置の決定はタッチ又は接近の決定を含むが、これに限定されるものではないかもしれない。
【0135】
本発明の一つの例に、正と負の値を含む一対の近隣の差(つまり、零交差箇所の両側の一対の正と負の値)は捜され、それから、この一対の近隣の差の間に零交差箇所の位置は測定される。たとえば、この一対の近隣の差によって傾斜度を決定し、それから零交差箇所の位置を判断する。そのうえ、正と負の値の出現順序が、近隣の差の間に零交差箇所の位置の判断と、一緒に使われることができる。前記近隣の差は互いに隣接した差であり、または、それの間に少なくとも1つの零値を含む隣接しない差である。そのうえ、1つの予め配列順序でこの一対の近隣の差が捜される。例えば、先に正の値を捜してから、負の値が出現し、一対の近隣の正と負の値を求めることができる。
【0136】
本発明のもう一つの例に、閾値(しきい値)は検索の開始位置を測定するために使われる。そこから、正と負の値を含む一対の近隣の差は捜され、それから、零交差箇所の位置はこの一対の近隣の差に基づいて測定される。当業者は、差が表す感知情報中で、外部物体によるタッチまたは接近に対応する感知情報は正の閾値より大きいとき、又は負の閾値より小さいとき、これらの閾値を使っている検索は外部物体によるタッチまたは接近の決定を含むが、これに限定されるものではないかもしれないと認めることができる。言い換えれば、感知情報が捜される過程で、感知情報は正の閾値より大きいとき、又は負の閾値より小さいとき、感知情報で外部物体によるタッチまたは接近に対応する零交差箇所は存在する。
【0137】
たとえば、閾値を使って正の値の差に対応する二進値を生み出す。たとえば、閾値より小さい(例えば正の閾値)差は0又は偽値(false)で表し、かつ閾値より大きい差は1又は真値(true)で表す。隣接した差が10での1又は真値の位置は開始位置であり、零交差箇所の検索方向は後ろへの方向である。同様に、閾値より大きい(例えば負の閾値)差は0又は偽値(false)で表し、閾値より小さい差は1又は真値(true)で表す。隣接した差が01での1又は真値の位置は開始位置であり、零交差箇所の検索方向は前への方向である。
【0138】
たとえば、表1と図4Aは、閾値を使って外部物体によるタッチまたは接近を測定するの例である。
【0139】
【表1】
【0140】
この例は、15個の感知器に対応する信号値と差値を含み、かつ正閾値T1(例えば4)と負閾値T2(例えば-4)を使っている判断結果を表す。正閾値を使用する判断結果で、開始位置は4番目および10番目の差であり、つまり、隣接した差10の1の位置である。図の中で、縦縞バーによる例として、2つの外部物体による接近又はタッチがあることを分かる。同様に、負閾値を使用する判断結果で、つまり、開始位置は隣接した差01の1の位置であり、つまり、5番目および12番目の差であり、図の中で、横縞バーによる例として、2つの外部物体による接近又はタッチがあることを分かる。当業者は、開始位置の数が外部物体による接近又はタッチの数に対応することを分かる。本発明は本範例の2つの外部物体による接近又はタッチの数に制限しない、また、より多くがあることができる。
【0141】
本発明のもう一つの例に、零交差箇所を捜す区間は第一閾値と第二閾値を使って決定され、それは外部物体による接近又はタッチことを含むが、これに限定されるものではないかもしれない。それから、区間内で零交差箇所を捜す。たとえば、第一閾値を使って正の値の差に対応する二進値を生成する。例えば、閾値より小さい差は0又は偽値(false)で表し、且つ閾値より大きい差は1又は真値(true)で表し、また、隣接した差が10での1の位置は開始位置である。そのうえ、例えば、第二閾値を使って負の値の差に対応する二進値を生成する。例えば、閾値より大きい差は0又は偽値(false)で表し、且つ閾値より大きい差は1又は真値(true)で表し、また、隣接した差が01での1の位置は終了位置である。また、開始位置及び終了位置を対にし(組み合わせ)、零交差箇所を捜す区間は決定される。本発明のもう一つの例に、開始位置と終了位置の間に傾斜度によって零交差箇所を決定する。当業者は、前記開始位置及び終了位置が交換されることができることを分かる。当業者は、開始位置が01での1の位置であり、且つ終了位置が10での1の位置であることによってタッチ関連の感知情報を決定することができることを理解する。
【0142】
例えば、もう一度、図4Aと表1で例として、第一の零交差箇所を捜す区間は4番目および5番目の差の間にあることを明らかになる。そして、対にする後の第二の零交差箇所を捜す区間は10番目および12番目の差の間にある。
【0143】
当業者は、正の閾値の検索と負の閾値の検索が同時に実行されることができる(または平行な処理)と認めることができる。区間の組合せは、1つの開始位置を決定した後、すぐに決定される終了位置及び該当開始位置対にすることによって実行されることができる。
【0144】
本発明の一つの例に、閾値は感知情報によって発生することができる。たとえば、閾値はすべての差の絶対値の最大値と割合(例えば割合1未満(例えば0.9))を乗算することで測定されることができ、あるいは、正閾値はすべての正の差の最大値と割合を乗算することで測定されることができ、あるいは、負閾値はすべての負の差の最小値と割合を乗算することで測定されることができる。言い換えれば、閾値は固定又は動態である。このように、閾値の絶対値が比較的大きいとき、外部物体による接近又はタッチは正閾値の検索とき決定されるかもしれない、しかし、負閾値の検索とき決定されることができない。この逆も、同じである。比較的大きい閾値はノイズ又はゴースト点(ghost)を除去するとき、都合が良い。また、比較的小さい閾値は本当の外部物体によるタッチの誤判を避けるために、都合が良い。
【0145】
以上から、同じ外部物体による接近又はタッチについて、正閾値を使って前方向へ捜すか、負閾値を使って後ろへ捜すとき、開始位置を決定し、同じ零交差箇所を得ることができる。そして、本発明の一つの例において、正閾値と負閾値を使って開始位置を捜し、該当開始位置によって零交差箇所を捜し、捜された零交差箇所の数によって、外部物体による接近又はタッチの数を判断し、さらに、零交差箇所の位置を確認する。外部物体による接近又はタッチに対応する零交差箇所の両側の値の一対の正と負の値は前が正値で、後が負値であるとき、正閾値によって判断された開始位置は後ろへ捜すときの零交差箇所であり、また、負閾値によって判断された開始位置は前方向へ捜すときの零交差箇所である。この逆も、同じである。そのうえ、同じ外部物体による接近又はタッチによって、正閾値と負閾値を使って開始位置を捜しでも、開始位置を必ずしも示さないかもしれない。
【0146】
本発明により提供される第二種類の位置分析は、感知情報で複数の信号値又は二重差に基づく、外部物体に対応する位置として、重心位置(重さまたは加重平均位置)を分析することが必要である。
【0147】
本発明の一つの例に、図4B乃至4Dで示すように、閾値は重心位置の信号値または二重差を決定するのに用いられる。閾値によって、信号値または二重差に対応する二進値を生み出すことができる。たとえば、閾値より小さな信号値または二重差は0又は偽値(false)で表し、閾値より大きな信号値または二重差は1又は真値(true)で表す。この例では、1又は真値によって意味される信号値または二重差は、重心位置を決定する際に使われる。当業者は、閾値を使って信号値の重心位置又は二重差を測定するための他の方法を分けることができる。たとえば、1又は真値によって意味される信号値または二重差及び両側の隣接した複数の信号値または二重差は重心位置を決定する際に使われる。また、例えば、隣接した連続の1又は真値によって意味される信号値または二重差で相対的に中心の信号値または二重差から前又は奥へi個とj個の信号値または二重差を、重心位置を決定する際に使われる信号値または二重差とする。
【0148】
本発明のもう一つの例に、中心の信号値または二重差として零交差箇所に対応する信号値または二重差を分析ために、連続の信号値または二重差は連続の差に変わる。そして、中心の信号値または二重差の前後のi個とj個の信号値または二重差は重心位置を決定するために使われる。
【0149】
本発明のもう一つの例に、零交差箇所は連続の差で分析され、そして、連続の差は連続の信号値または二重差に変わり、それから、零交差箇所に対応する信号値または二重差は確認され、中心の信号値または二重差とする。その後、中心の信号値または二重差の前後のi個とj個の信号値または二重差は重心位置を決定するために使われる。
【0150】
重心計算範囲として第n番目の信号値の前後にそれぞれi個とj個の信号値を使うと仮定して、重心位置は、以下の通りに重心計算範囲で各々の信号値Ckとその位置Xkに基づいて測定されることができる:
【0151】
【数1】
【0152】
そこで、Xkは1-D(一次元)座標(例えばXまたはY座標)または二次元の座標(例えば(X、Y))である。
【0153】
第(k-1)番目の信号値と第k番目の信号値との差がDkであるならば、そして、第k番目の二重差はDDk=Dk−1−Dk=(Ck−Ck−1)−(Ck+1−Ck)=2Ck−Ck−1+Ck+1である。そして、重心計算範囲として第n番目の二重差の前後にそれぞれi個とj個の信号値を使うならば、重心位置DDcentroid は以下の通りに重心計算範囲で各々の二重差DDkに基づいて測定されることができる:
【0154】
【数2】
【0155】
そこで、Xkは1-D(一次元)座標(例えばXまたはY座標)または二次元の座標(例えば(X、Y))である。当業者は、第k番目の二重差はDDk=(Ck−Ck−2)−(Ck+2−Ck)=2Ck−Ck−2+Ck+2であるとき、同様に重心位置計算することもできる。これは、さらに記述されない。
【0156】
本発明のもう一つの例に、重心位置を測定するために使われる信号値または二重差は、最初に基準値を引くことで得られる。たとえば、この基準値は、すべての信号値または二重差の平均値、重心位置を測定するために使われる信号値または二重差の両側の複数の信号値または二重差の平均値、または重心位置を測定するために使われる信号値または二重差の両側の隣接している複数の重心位置を測定するために使われない信号値または二重差の平均値が挙げられる。当業者は、それからその他基準値の決定方式と認めることができる。例えば、基準値は、一方の少なくとも1つの信号値または二重差の第一割合及び他方の少なくとも1つの信号値または二重差の第二割合に基づいて測定されることができる。
【0157】
基準値として第n番目の信号値の前後にそれぞれ第i番目の信号値Cn−iと第j番目の信号値Cn+jの平均をする(Cbase(i,j)(Cbase(i,j)=(Cn−i+Cn+j)/2))及び重心計算範囲として第n番目の信号値の前後にそれぞれi個とj個の信号値を使うと仮定して、重心計算範囲で各々の信号値Ckから基準信号値Cbase(i,j)を引いて計算信号値(Ck-Cbase(i,j))とし、重心位置Ccentroid は以下の通りに得られる:
【0158】
【数3】
【0159】
そこで、Xkは1-D(一次元)座標(例えばXまたはY座標)または二次元の座標(例えば(X、Y))である。
【0160】
本発明により提供される第三種類の位置分析は、感知情報で複数の差に基づく、外部物体に対応する位置として、重心位置(重さまたは加重平均位置)を分析することが必要である。
【0161】
第(k-1)番目の信号値Ck-1と第k番目の信号値Ckとの差がDkである。
【0162】
【数4】
【0163】
したがって、重心位置(Ccentroid)は、信号値間の差によって計算されることができる。そのうち、重心計算範囲での差はDn-(i-1),Dn-(i-2),..., Dk, Dk+1,...,Dn+j,Dn+(j+1)である。言い換えれば、重心位置(Ccentroid)は、重心計算範囲での差に基づいて計算されることができる。
【0164】
例えば、第n番目の信号値の前後の1つの信号値によって重心位置(Ccentroid)を決定することと考えられるならば、重心計算範囲での差(たとえば、Dn-1、Dn、Dn+1、Dn+2等)の計算は以下の通り:
【0165】
【数5】
【0166】
当業者は、前記重心計算範囲の方法が重心位置の信号値、差または二重差を決定するために適用されることを認めることができる。
【0167】
上記の説明から、本発明は感知情報の分析によって位置検知を行い、感知情報が最初得られた信号値、差または二重差を含むが、これに限りだけでないかもしれない。しかし、また、信号値、差または二重差は最初得られた感知情報から変わるかもしれない。それによって、同じ外部物体に対応する2本の異なる軸(例えばXとY軸)の一次元又は二次元の感知情報を分析によって、つまり、2本の異なる軸(例えばXとY軸)の一次元又は二次元の位置分析によって、外部物体が2本の異なる軸上での位置は得られ、それから、二次元の位置(二次元の座標)は造られることができる。
【0168】
当業者は、上記の一次元の位置分析の操作は前記コントローラー160またはホスト170によって行われることができると認めることができる。
【0169】
〔二次元位置分析〕
二次元の感知情報は複数の一次元の感知情報からなり、そのうち、一次元(1-D)の感知情報の各々は複数の第一の1-D位置に対応する感知情報を含み、そして、一次元(1-D)の感知情報の各々は1つの第二の1-D位置に対応する。このように、二次元の位置分析は、複数の1-Dタッチ感知情報を一次元の位置分析で実施し、つまり、二次元の位置分析は複数回の一次元の位置分析を少なくとも含むことができる。
【0170】
そのうえ、本発明の第一例において、外部物体における第一の1-D位置に対応する感知情報での第一の1-D重心位置は、二次元の位置(例えば、二次元の座標(第一の一次元の重心位置、第一の1-D感知情報の第二の1-D位置))であり、外部物体の二次元の重心位置(または幾何中心)がそれによって得られる。そのうち、一次元の重心位置の加重値の各々は外部物体における第一の1-D感知情報での信号値又は二重差(例えば、第一の1-D感知情報で最近隣の1-D重心位置の両信号値又は二重差の1つ、または平均値、内挿値)であり、あるいは、外部物体における第一の1-D感知情報での信号値又は二重差の合計である。
【0171】
このように、二次元の位置分析は各々の第一の次元の感知情報で一次元の位置分析を実行することができ、各々の外部物体における少なくとも1つの二次元の位置に基づく、各々の外部物体の二次元の重心位置を分析することができる。
【0172】
また、本発明の第二例において、二次元の位置分析は、第一軸(第一の一次元(1-D))で複数の1-D感知情報それぞれを一次元の位置分析で実行することができる。各々の外部物体における第一軸に対する少なくとも1つの1-D位置によって、各々の外部物体における第一軸での重心位置を分析することができる。同様に、二次元の位置分析は、第二軸(第二の一次元(1-D))で複数の1-D感知情報それぞれを一次元の位置分析で実行することができる。各々の外部物体における第二軸に対する少なくとも1つの1-D位置によって、各々の外部物体における第二軸での重心位置を分析することができる。各々の外部物体における第一軸での重心位置及び各々の外部物体における第二軸での重心位置を対にするにとって、各々の外部物体における二次元(2-D)の重心位置を分析することができる。
【0173】
言い換えれば、二次元の位置分析は、2本の異なる軸での感知情報(例えば、第一軸での2-D感知情報、第二軸での2-D感知情報)によって、一次元の位置分析を実行し、そして、各々の外部物体における二次元(2-D)の位置を分析することができる。
【0174】
また、本発明の第三例において、二次元の位置分析は、第一軸での複数の1-D感知情報で各々の外部物体における一次元(1-D)の重心位置を分析し、各々の1-D感知情報に対応する二次元(2-D)の位置によって、第一軸で各々の外部物体における一次元の重心位置が決定されることができる。また、二次元の位置分析は、第二軸での複数の1-D感知情報で各々の外部物体における一次元(1-D)の重心位置を分析し、各々の1-D感知情報に対応する二次元(2-D)の位置によって、第二軸で各々の外部物体における一次元の重心位置が決定されることができる。そらに、二次元の位置分析は、第一軸と第二軸で各々の外部物体における一次元の重心位置にとって、二次元(2-D)の重心位置が決定されることができる。
【0175】
当業者は、二次元の感知情報が画像処理で各々の外部物体の位置を測定することができると認めることができる。たとえば、分水嶺(watershed algorithm)というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。他の例として、分水嶺というアルゴリズムは各々の分水嶺の位置を分析し、それから、各々の分水嶺の位置に近く感知情報を使って重心位置はより正確な位置を得る計算される。
【0176】
本発明の第四例に、最初得られる複数の1-D感知情報は信号値または二重差で表し、そして、それは二次元の感知情報から作られる画像(またはマトリックス)を造る。分水嶺(watershed algorithm)というアルゴリズム又はその他画像処理技術は、位置分析のために使われることができる。あるいは、「連結成分」というアルゴリズムが使われることができる。そして、それは画像の中で関連のある部分を分析し、各々の外部物体の画像を決定し、さらに物体(例えば指、ヤシまたはペン)の位置またはタイプを決定する。
【0177】
本発明の第五例に、最初得られる複数の1-D感知情報は差で表し、さらにそれから信号値または二重差に変わり、そして、それは二次元の感知情報から作られる画像(またはマトリックス)を造る。また、分水嶺というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。
【0178】
本発明の第六例に、最初得られる複数の1-D感知情報は差で表し、各々の1-D感知情報の位置を分析によって、各々の零交差箇所の位置及び各々の零交差箇所での信号値または二重差を決定でき、そして、それは二次元の感知情報から作られる画像(またはマトリックス)を造る。また、分水嶺というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。
【0179】
零交差箇所の二重差は2つの直接隣接した差によって生成することができる。たとえば、零交差箇所は第k-1個の差と第k個の差の間にあり、そして、この零交差箇所の二重差はDDk=Dk-1-Dkである。零交差箇所の信号値は、すべての1-D感知情報の差を信号値に変えた後生成することができるか、零交差箇所に最も近い複数の差に基づいて生成することができる。例えば、零交差箇所は第n番目の信号値に最も近い、そして、第n番目の信号値の前後に第i個の信号値Cn-iと第j個の信号値Cn+jの平均は基準値Cbase(i,j)(Cbase(i,j)(Cbase(i,j)=(Cn−i+Cn+j)/2))とし、それから、信号値は以下の通り:
【0180】
【数6】
【0181】
言い換えれば、第n-(i-1)個差〜第n+j個の間の差によって、零交差箇所の信号値が決定される。
【0182】
本発明の第七例に、最初得られる複数の1-D感知情報は信号値と二重差で表し、さらにそれから差に変わる。各々の1-D感知情報の位置を分析によって、各々の零交差箇所の位置を決定でき、各々の零交差箇所での信号値または二重差と一緒に二次元の感知情報から作られる画像(またはマトリックス)を造る。また、分水嶺というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。
【0183】
本発明の第八例に、第一軸に関する二次元の感知情報を得るところで、また過程中で、第二軸に関する1-D感知情報も得られる。第一軸に関する二次元の感知情報において位置分析を実行した後、各々の外部物体の第一軸での1-D位置または2-D位置は、得られることができる。そのうえ、第二軸に関する1-D感知情報において位置分析を実行した後、各々の外部物体の第二軸での1-D位置は得られることができる。第二軸での1-D位置は第一軸での1-D位置を組み合わせて、2-D位置に成れる。また、それは第一軸での2-D位置中で第二軸の位置を代わるか、修正するのに用いられることができる。
【0184】
当業者は、上記の二次元の位置分析の操作は前記コントローラー160またはホスト170によって行われることができると認めることができる。そのうえ、本発明の一つの例において、同じ外部物体による接近又はタッチに対応する各々の1-D重心位置と、少なくとも1つの他の同じ外部物体による接近又はタッチに対応する各々の1-D重心位置との1-D距離又は2-D距離は閾値内である。本発明のもう一つの例に、同じ外部物体による接近又はタッチに対応する各々の1-D重心位置の加重値は閾値より大きいである。
【0185】
以下の説明では、タッチ関連の感知情報は感知情報中で1つのタッチ関連の感知情報又は複数のタッチ関連の感知情報うちの1つである。タッチ関連の感知情報の操作は特定のタッチ関連の感知情報に適用されることができ、また本発明のすべてのタッチ関連の感知情報に適用されることもできる。しかし、本発明はこれに限らない。
【0186】
図5を参照して、本発明の第一の実施例について、デュアル差動感知方法は、例示される。まず、ステップ510において、複数の感知器付きの感知装置は、提供される。それから、ステップ520において、感知情報は、得される。感知情報の値の各々は複数の感知器中で3つの感知器の信号に対応する。その後、ステップ530において、感知装置で外部物体によって接触されるか、接近される位置は、感知情報に基づいて決定される。
【0187】
本発明の第一範例に、感知情報はデュアル差動回路で得られることができる。そして、図3D、3Iと3Jで示すように、デュアル差動回路は第一級差動回路、第二級差動回路と測定回路を含む。
【0188】
第一級差動回路は、一対または複数の第一減算器(例えばスイッチング回路325の差動増幅器)を含む。第一減算器の各々は、これらの感知器で一対の感知器によって第一級差動信号を生み出す。
【0189】
そのうえ、第二級差動回路は、一対または複数の第二減算器(例えば積分回路324の積分器)を含む。第二減算器の各々は、これらの第一級差動信号で一対の第一級差動信号によって第二級差動信号を生み出す。
【0190】
さらに、測定回路は図3Aで示すように、ADC回路であり、また、図3Dで示すように積分器324とADC回路との組合せからなる。または、測定回路は図3Iで示すように、複数の積分器324、ADC回路とスイッチング回路370との組合せからなる。また、図3Dまたは図3Jで示すように、これらの第二級差動信号は測定回路にとって複数の時点に測定される、あるいは、図3Iで示すように、これらの第二級差動信号は測定回路にとって一つの時点に測定される。
【0191】
本発明の図3D、3Iと3Jで、差動積分器324によって信号の引算と測定を同時に行う。信号の測定はADC回路でデジタル信号を生み出すことを更に含み、しかし、これらに限られていない。前記関連の図面と説明は単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0192】
前記デュアル差動回路で、感知情報の各値がこれらの第二級差動信号の1つによって生成し、且つ第二級差動信号の各々は一対の第一級差動信号の第一差信号と第二差信号によって生成し、そのうち、第一差信号は、それらの感知器で第一感知器と第二感知器の信号によって生成し、また、第二差信号は、それらの感知器で前記第二感知器と第三感知器の信号によって生成する。言い換えれば、感知情報の各値は、これらの感知器で3つの感知器の信号に対応する。
【0193】
本発明の第二範例に、感知情報は差動回路で得られることができる。そして、図3C、3Gと3Hで示すように,差動回路は一つまたは複数の減算器と測定回路を含む。これらの減算器に、各々の減算器は、一対の感知器の信号によって、差動信号を生み出す。測定回路は、これらの差動信号を測って、差動感知情報を生成し、そのうち、感知情報の各々の値は差動感知情報の一対の値の差である。
【0194】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Cまたは図3Hで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Gで示すように、これらの第二級差動信号は一つの時点に測定される。
【0195】
図3C、3Gと3Hで、減算器と一部の測定回路は、積分器324にとって実施されることができる。前記図面と説明は、単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0196】
そのうえ、感知情報の各値は第一差と第二差との差であり、第一差信号はそれらの感知器で第一感知器と第二感知器との信号によって生成され、且つ第二差信号はそれらの感知器で前記第二感知器と第三感知器との信号によって生成される。言い換えれば、感知情報の各値は、これらの感知器で3つの感知器の信号に対応する。
【0197】
本発明の第三範例に、図3B、3Eと3Fで示すように,感知情報は測定回路で得られることができる。測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの感知器の信号を測ってから、最初感知情報を生成する。感知情報は、最初感知情報によって生成し、そのうち、感知情報の各値は最初感知情報の3個の値から生成する。
【0198】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Bまたは図3Fで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Eで示すように、これらの第二級差動信号は一つの時点に測定される。
【0199】
感知情報の各値は第一差と第二差との差又は和であり、そのうち、第一差は最初感知情報の3個の値で前2つの値の差であり、且つと第二差は最初感知情報の3個の値で後2つの値の差である。言い換えれば、最初感知情報の3個の値はそれぞれ第一値、第二値と第三値であり、感知情報の各々の値は(第二値−第一値)−(第三値−第二値)、(第一値−第二値)−(第二値−第三値)、(第二値−第一値)+(第二値−第三値)、又は(第一値−第二値)+(第三値−第二値)である。前記最初感知情報の各々の値はこれらの感知器の一つの信号によって生成される。言い換えれば、感知情報の各値は最初感知情報の3つの感知器の信号に対応する。
【0200】
本発明の一つの例に、感知情報で各々のタッチ関連の感知情報は2つの零交差箇所を持って、そして、外部物体によって接触されるか、接近される位置はタッチ関連の感知情報にとって判断される。本発明のもう一つの例に、タッチ関連の感知情報は情報が始めである部分又は最後部分で配置される。外部物体はタッチ装置の検知できる区域の外縁だけと接触するか、接近するとき、2つの零交差箇所がない、そして、例外処理は必要とされる。
【0201】
さらに、前記時点は、一つ以上のクロックまたは一つ以上のクロックの部分を経過することを含むが、これに限定されるものではないかもしれない。
【0202】
さらにまた、前記感知情報の獲得と生成は、コントローラー160で実行されることができる。前記デュアル差動回路、差動回路と測定回路は、コントローラー160で実行されることができる。
【0203】
図6を参照して、本発明の第二の実施例による可撓性感知装置の感知方法は、提供される。まず、ステップ610において、複数の感知器付きの可撓性感知装置は表示装置で設置され、可撓性感知装置が複数の感知器を備え、感知器の信号値は表示装置からノイズ影響は該感知器と前記表示装置の間の距離に対応する。それから、ステップ620において、感知情報は得られ、感知情報の値の各々の表示装置からノイズ影響は感知器で3つの感知器と表示装置の間の距離に対応する。
【0204】
図7Aを参照して、感知装置120は可撓性感知装置である。そのままのとき(接触されないとき)、感知装置120の第二感知層120Bの各部分と表示装置110の間の距離は距離d1である。接触されるとき、感知装置120は変形し、変形の程度は圧力によって異なり、そして、第二感知層120Bの各部分と表示装置110の間の距離はもはや均一でないようにある。例えば、ある部分と表示装置110の間の距離は、距離d1から距離d2に変わる。また、ある部分と表示装置110の間の距離は、距離d2より大きい距離に変わる。あるいは、ある部分と表示装置110の間の距離は、距離d2より小さい距離に変わる。
【0205】
図7Cを参照して、感知情報の各々の二重差は、3つの感知器の信号に対応する。たとえば、感知情報中の1つの値は、感知器140B-1、140B-2と140B-3に対応する。感知器140B-1、140B-2と140B-3の信号はそれぞれC1+N1、C2+N2とC3+N3である。C1、C2とC3は感知器140B-1、140B-2と140B-3のノイズ影響されない信号を表す。また、N1、N2とN3は感知器140B-1、140B-2と140B-3の表示装置110によるノイズ影響される信号を表す。
【0206】
N1、N2とN3はそれぞれ感知器140B−1、140B−2、140B−3と表示装置110の間の距離に対応する。それが表示装置110により間近であるほど、表示装置110のノイズ影響は、より大きい。言い換えれば、感知情報の各値に関する表示装置110によるノイズ影響は、感知器で3つの感知器と表示装置の間の距離に対応する。例えば、感知器140B−1、140B−2と140B−3に対応する二重差は((C1+N1)−(C2+N2))−((C2+N2)−(C3+N3))であり、そのうち、二重差のノイズ影響の成分は((N1−N2)−(N2−N3))である。(N1−N2)は感知器140B−1と140B−2間の高さ差であり、且つ(N2−N3)は感知器140B−1と140B−3間の高さ差である。3つの感知器は隣接しているので、(N1−N2)及び(N2−N3)は近い、そして、彼らの引算がノイズ影響を最小にすることができる。
【0207】
本発明の第一範例に、感知情報はデュアル差動回路で得られることができる。そして、図3D、3Iと3Jで示すように、デュアル差動回路は第一級差動回路、第二級差動回路と測定回路を含む。関連詳細は前記説明を参照することができ、そして、さらに記述されない。
【0208】
前記デュアル差動回路で、感知情報の各値が1つのノイズ値を含み、ノイズ値の各々は一対の第一級差動信号の第一差信号のノイズと第二差信号のノイズによって生成し、そのうち、第一差信号のノイズは、それらの感知器で第一感知器及び第二感知器と表示装置の間の距離差に対応し、また、第二差信号のノイズは、それらの感知器で前記第二感知器及び第三感知器と表示装置の間の距離差に対応する。
【0209】
本発明の第二範例に、感知情報は差動回路で得られることができる。そして、図3C、3Gと3Hで示すように,差動回路は一つまたは複数の減算器と測定回路を含む。これらの減算器中で、各々の減算器は、一対の感知器の信号によって、差動信号を生み出す。測定回路は、これらの差動信号を測って、差動感知情報を生成し、そのうち、感知情報の各値は差動感知情報の一対の値の差である。関連詳細は前記説明を参照することができ、そして、さらに記述されない。
【0210】
そのうえ、感知情報の各値が1つのノイズ値を含み、ノイズ値の各々は感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、そのうち、第一ノイズ差はそれらの感知器で第一感知器及び第二感知器と表示装置の間の距離差に対応し、また、第二ノイズ差は、それらの感知器で前記第二感知器及び第三感知器と表示装置の間の距離差に対応する。
【0211】
本発明の第三範例に、図3B、3Eと3Fで示すように,感知情報は測定回路で得られることができる。測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの感知器の信号を測ってから、最初感知情報を生成する。感知情報は、最初感知情報によって生成し、そのうち、感知情報の各値は最初感知情報の3個の値から生成する。関連詳細は前記説明を参照することができ、そして、さらに記述されない。
【0212】
感知情報の各値は第一差と第二差との差又は和であり、そのうち、第一差は最初感知情報の3個の値で前2つの値の差であり、且つと第二差は最初感知情報の3個の値で後2つの値の差である。最初感知情報の各々の値の表示装置によるノイズ影響は感知器の1つと表示装置の間の距離に対応する。
【0213】
本発明の一つの例に、感知情報で各々のタッチ関連しない感知情報の表示装置によるノイズ影響は1つの零値範囲内である。さらに、前記時点は、一つ以上のクロックまたは一つ以上のクロックの部分を経過することを含むが、これに限定されるものではないかもしれない。
【0214】
さらにまた、前記感知情報の獲得と生成は、前記コントローラー160で実行されることができる。前記デュアル差動回路、差動回路と測定回路は、コントローラー160で実行されることができる。
【0215】
以上の実施例は本発明を説明するために提示されたものであり、本発明の範囲を制限するものではなく、本発明の要旨より離脱せずに当業者がなしうる各種の変更或いは修飾することは、本発明の請求範囲に属するものとする。
【符号の説明】
【0216】
10 タッチ表示装置
11 コントローラー
12 外部物体センサー
100 位置検知装置
110 表示装置
120 感知装置
120A、120B 感知層
140 感知器
14、16、17 ピーク
15 零交差箇所
130 駆動/検知ユニット
130A 駆動ユニット
130B 検知ユニット
160 コントローラー
161 プロセッサー
162 メモリ
170 ホスト
171 中央処理装置
173 記憶装置
310 スイッチング回路
311、312、313、314、315 入力
320 検出回路
321、323、325 スイッチング回路
322、324 積分器
340、350、360 検出器
330 ADC回路
Cint 増幅器
P1、P2 基準点
SI 感知情報
Senable イネーブル信号
Ssync 同期信号
Sreset リセット信号
W1、W2 ワイヤ
【技術分野】
【0001】
本発明は、タッチ感知方法及び装置に係り、特にデュアル差動感知方法及び装置に関する。
【背景技術】
【0002】
タッチディスプレイは、種々の電気装置に広く応用される。一般的方法はタッチパネルを使用し、タッチディスプレイ上に二次元のタッチ領域(接触領域)を定義し、タッチ板上で縦軸と横軸を走査し、感知情報を得り、そして指のような物体がタッチ板と接近又は接触することを判断する。例えば、米国特許第4639720号には静電容量方式タッチパネルが開示されている。
【0003】
感知情報はADC変換器(アナログ・デジタル コンバーター)で、複数の連続信号値に変わることができ、外部物体がタッチする又は接近する前後の信号値の変化量によって、触わられる又は接近される位置を決定できます。
【0004】
通常、タッチパネルを制御するコントローラーは先に基準値(ベースライン)として、外部物体がタッチする又は接近することがない時の感知情報を得る。例えば、静電容量方式タッチパネルにおいて、各々の導電線は、それぞれ基準値に相当する。コントローラーは、続きの感知情報と基準値とを比較し、外部物体がタッチするか、又は接近するかどうか決定して、さらに外部物体の位置を判断する。例えば、タッチパネルがタッチされない又は接近されないとき、続きの感知情報は基準値に対してゼロ又は約ゼロ(零値又は約零値)とすることである。感知情報は基準値に対してゼロ又は約ゼロとすることによって、外部物体がタッチするか、又は接近するかどうか決定する。
【0005】
図1Aで示すように、外部物体12(例えば指)はタッチ表示装置10の感知装置120と接触又は接近するとき、ある軸(例えばx軸)の上の感知器140の感知情報は図1Bで示すように信号値に変わり、指の形状に相当し、信号値は波形又は指プロフィール(輪郭)を示す。指プロフィールのピーク14の位置は、指による接触又は接近される位置を示す。
【0006】
ディスプレイが作動している時、その表面には、大量のノイズを発し、ディスプレイの表面に設置される感知装置がディスプレイのノイズ中で暴露し、そして、間違った判断をする。先行技術の1つの解決方法は、ディスプレイで発されるノイズを遮断するためにディスプレイと感知装置の間で奥遮断(シールド)層を付加することである。しかし、この奥遮断(シールド)層の追加は、追加費用と設計を必要とする。
【0007】
上記から、先行技術がまだ欠点を持つことは、明らかになった。これらの問題を解決するために、この業者は解決手段を求めても、また、適用の設計と構造とを提供していない。このように、これらの問題を解決する新しい技術は産業に必要である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第4639720号
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の一つの目的は、現在のタッチディスプレイの欠点を解決するために、デュアル差動感知装置及びその方法を提供することである。その解決しようとする課題は雑音(ノイズ)の干渉(影響)を大幅に減少することである。そして、本発明は産業に非常に実用性がある。
【0010】
本発明のもう一つの目的は、現在のタッチディスプレイの欠点を解決するために、デュアル差動感知装置及びその方法を提供することである。その解決しようとする課題は可撓性感知装置と表示装置との間にギャップ(間隙)があるとき、変形によるノイズ影響を最低になることである。
【課題を解決するための手段】
【0011】
本発明の目的と解決しようとする課題は以下の技術によって実現できる。本発明によれば、デュアル差動感知方法は複数の感知器を含む感知装置を提供する工程と、感知情報を取る工程とを含み、該感知情報中の各値はそれぞれ3つの感知器の信号に対応し、該感知情報によって感知装置上に外部物体による接近又は接触される位置は決定される。
【0012】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0013】
前述のデュアル差動感知方法は、一つのデュアル差動回路を提供する工程を更に含む。該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数個の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0014】
前述のデュアル差動感知方法には、前記感知情報中での各値は前記第二級差信号中の1つから生成され、前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0015】
前述のデュアル差動感知方法は、前記感知器中から一対の感知器の信号によって1つの差信号を生成する1つ又は複数の減算器と、1つ又は複数の測定時点で、前記差信号の各々を測定して1つの差動感知情報を生成する測定回路とを含む差動回路を提供する工程と、前記差動感知情報によって前記感知情報を生成する工程とを更に含み、そのうち、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0016】
前述のデュアル差動感知方法には、感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0017】
前述のデュアル差動感知方法には、前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0018】
前述のデュアル差動感知方法は、1つ又は複数の測定時点で、前記感知器の信号を測定して1つの最初感知情報を生成する1つの測定回路を提供する工程と、前記最初感知情報によって前記感知情報を生成する工程を更に含み、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0019】
前述のデュアル差動感知方法には、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差である。
【0020】
前述のデュアル差動感知方法には、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0021】
前述のデュアル差動感知方法には、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される。
【0022】
本発明の目的と解決しようとする課題は以下の技術によって実現できる。本発明によれば、デュアル差動感知装置は複数の感知器を含む感知装置と、感知情報を得る制御装置とを備え、前記感知情報中で各値はそれぞれ3つの感知器の信号に対応することを特徴とする。
【0023】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0024】
前述のデュアル差動感知装置はデュアル差動回路を更に備え、該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数個の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0025】
前述のデュアル差動感知装置には、前記感知情報中での各値は前記第二級差信号中の1つから生成され、前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0026】
前述のデュアル差動感知装置は、一つの差動回路を更に備え、該差動回路は1つ又は複数の減算器と、測定回路とを更に含み、前記減算器の各々は前記感知器中から一対の感知器の信号によって1つの差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、前記制御装置は前記差動感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0027】
前述のデュアル差動感知装置には、感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0028】
前述のデュアル差動感知装置には、前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される。
【0029】
前述のデュアル差動感知装置は、1つの測定回路を更に備え、前記測定回路は1つ又は複数の測定時点で、前記感知器の信号を測定し、1つの最初感知情報を生成し、前記制御装置は前記最初感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0030】
前述のデュアル差動感知装置には、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差である。
【0031】
前述のデュアル差動感知装置には、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0032】
前述のデュアル差動感知装置には、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される。
【0033】
本発明の目的と解決しようとする課題は更に以下の技術によって実現できる。本発明によれば、可撓性感知装置の感知方法は、表示装置上に可撓性感知装置を提供する工程と、感知情報を得る工程とを含み、そのうち、前記可撓性感知装置は複数の感知器を含み、前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する。
【0034】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0035】
前述の可撓性感知装置の感知方法は、デュアル差動回路を提供する工程を更に含み、該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数個の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0036】
前述の可撓性感知装置の感知方法には、前記感知情報中の各値は1つのノイズ値を含み、ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0037】
前述の可撓性感知装置の感知方法は、前記感知器中の一対の感知器の信号によって1つの差信号を生成する1つまたは複数の減算器と、1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成する測定回路とを含む差動回路を提供する工程と、前記差動感知情報によって前記感知情報を生成する工程を更に含み、そのうち、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0038】
前述の可撓性感知装置の感知方法には、感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0039】
前述の可撓性感知装置の感知方法には、前記感知情報中の各値はそれぞれ1つのノイズ値を含み、ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0040】
前述の可撓性感知装置の感知方法には、1つ又は複数の測定時点で、前記感知器の信号の各々を測定して1つの最初感知情報を生成する1つの測定回路を提供する工程と、前記最初感知情報によって前記感知情報を生成する工程とを更に含み、そのうち、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0041】
前述の可撓性感知装置の感知方法には、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する。
【0042】
前述の可撓性感知装置の感知方法には、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0043】
前述の可撓性感知装置の感知方法には、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による一つの零値範囲にある。
【0044】
本発明の目的と解決しようとする課題は更に以下の技術によって実現できる。本発明によれば、可撓性感知装置の感知システムは、表示装置と可撓性感知装置と制御装置を備え、前記可撓性感知装置は複数の感知器を含み、前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、前記制御装置は感知情報を得り、前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する。
【0045】
本発明の目的と解決しようとする課題は以下の技術によって更に実現できる。
【0046】
前述の可撓性感知装置の感知システムはデュアル差動回路を更に備え、該デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、前記第一級差動回路は一対または複数の第一減算器を含み、前記第一減算器の各々は前記感知器中で一対の感知器の信号によって1つの第一級差信号を生成し、前記第二級差動回路は1つまたは複数の第二減算器を含み、前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって1つの第二級差信号を生成し、前記測定回路は1つまたは複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する。
【0047】
前述の可撓性感知装置の感知システムには、前記感知情報中の各値は1つのノイズ値を含み、ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0048】
前述の可撓性感知装置の感知システムは、差動回路を更に備え、該差動回路は1つまたは複数の減算器と、測定回路とを含み、前記減算器の各々は前記感知器中の一対の感知器の信号によって1つの差信号を生成し、前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、前記制御装置は前記差動感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される。
【0049】
前述の可撓性感知装置の感知システムには、前記感知情報の各値がそれぞれ前記差動感知情報中の一対の値の差である。
【0050】
前述の可撓性感知装置の感知システムには、前記感知情報中の各値は1つのノイズ値を含み、ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する。
【0051】
前述の可撓性感知装置の感知システムは、1つの測定回路を更に備え、前記測定回路は1つ又は複数の測定時点で、前記感知器の信号の各々を測定し、1つの最初感知情報を生成し、前記最初感知情報によって前記感知情報を生成し、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される。
【0052】
前述の可撓性感知装置の感知システムには、前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する。
【0053】
前述の可撓性感知装置の感知システムには、該最初感知情報の3つの値は第一値、第二値と第三値であり、該感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)である。
【0054】
前述の可撓性感知装置の感知システムには、前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による一つの零値範囲にある。
【0055】
本発明は先行技術に比べて顕著な利点と効果を持っている。本発明は、デュアル差動感知装置及びその方法を提供する。本発明によれば、複数の感知器を含む感知装置が提供する信号によって、感知情報を生成し、感知情報中での各値は3つの感知器の信号に対応する。本発明は可とう性(可撓性)感知装置に応用でき、表示装置(ディスプレイ)に設置される。各感知器の信号の表示装置によるノイズ影響は感知器と表示装置との間の距離に対応し、感知情報中での各値の表示装置によるノイズ影響は感知器中の3つの感知器と表示装置との間のそれぞれ距離に対応する。
【0056】
前記のように、ディスプレイが作動している時、その表面には、大量のノイズを発し、ディスプレイの表面に設置される感知装置がディスプレイのノイズ中で暴露し、そして、間違った判断をする。先行技術の解決方法の1つは、ディスプレイで発されるノイズを遮断するためにディスプレイと感知装置の間で奥遮断(シールド)層(rear shielding layer)を付加することである。しかし、この奥遮断(シールド)層の追加は、追加費用と設計を必要とする。
【0057】
特に感知装置とディスプレイ間のギャップ(間隙)があるとき、感知装置はタッチによる変形する可撓性感知装置であれば、感知装置の異なる位置に対する変形の異なる程度によってノイズ影響が異なる。
【発明の効果】
【0058】
本発明によれば、次の利点と効果がある:
1.最初感知情報(原始データ)に対し、デュアル差動感知情報は共同モードのノイズ影響を大幅に減少する。
2.前記可撓性感知装置と前記表示装置の間に奥遮蔽層がないでも、前記差動感知情報は変形に起因するノイズ影響を減少られ、間違った判断をすることを避けることができる。
【0059】
上記の説明は、本発明の技術の実施の概略だけである。本発明の技術手段を明らかになり、本発明の上記の目的と他の目的、特徴と利点を理解するために、本発明の好ましい実施例と取付けられた図面とともに下で提供される。
【図面の簡単な説明】
【0060】
【図1A】先行技術によるタッチ装置を示す図である。
【図1B】先行技術による信号値を示す図である。
【図1C】本発明の差を示す図である。
【図1D】本発明の二重差を示す図である。
【図1E】本発明の二重差を示す図である。
【図1F】本発明の感知装置を示す構造図である。
【図1G】本発明の計算システムを示す機能ブロック図である。
【図2A】本発明の駆動/検知ユニットと感知装置を示す構造図である。
【図2B】本発明の駆動/検知ユニットと感知装置を示す構造図である。
【図3A】本発明の検知ユニットを示す機能ブロック図である。
【図3B】本発明の検出器を示す回路図である。
【図3C】本発明の検出器を示す回路図である。
【図3D】本発明の検出器を示す回路図である。
【図3E】本発明の検出回路とADC回路を示す接続図である。
【図3F】本発明の検出回路とADC回路を示す接続図である。
【図3G】本発明の検出回路とADC回路を示す接続図である。
【図3H】本発明の検出回路とADC回路を示す接続図である。
【図3I】本発明の検出回路とADC回路を示す接続図である。
【図3J】本発明の検出回路とADC回路を示す接続図である。
【図4A】本発明の二進値の検出位置を示す図である。
【図4B】本発明の重心位置を検出する例を示す図である。
【図4C】本発明の重心位置を検出する例を示す図である。
【図4D】本発明の重心位置を検出する例を示す図である。
【図5】本発明の第一実施例のデュアル差動感知方法のフローチャートを示す図である。
【図6】本発明の第二実施例の可撓性差動装置の感知方法のフローチャートを示す図である。
【図7A】本発明の可撓性差動装置が圧力を受ける例を示す図である。
【図7B】本発明の可撓性差動装置が圧力を受ける例を示す図である。
【図7C】本発明の可撓性差動装置が圧力を受ける例を示す図である。
【発明を実施するための形態】
【0061】
本発明のある実施例は、下の詳細で記述される。しかし、以下の実施例に加えて、本発明は他の実施例にも適用でき、そして、本発明の範囲は以下の実施例に制限されない。そのうえ、説明のより良い理解ために、図面内の各々の部分にはその相対のサイズに従って作図することがなく、あるサイズとその他の関するサイズの割合は誇張され、そして、無関係な部分は省略される。
【0062】
〔感知情報〕
本発明には、感知情報がタッチ装置から提供され、タッチ装置上に一次元(1-D)、二次元(2-D)又は多次元の状態を表示する。感知情報は1つ又は複数の感知器から得られ、1つ又は複数のA/D変換器(ADC)で複数の連続信号値に変わり、感じる電荷、電流、電圧、容量又はその他電気特性の量又は変化量を表示する。感知情報を交替に、順に、平行に取る又は伝送することはでき、また、感知情報を1つ又は複数の信号に組み合わせることは当業者が通常知識から容易に実施できる。当業者とは一般的に知られている技術(周知技術、慣用技術を含む)が持っている人を意味する。以下にはそのとおり。
【0063】
当業者にとっては本発明において記述される感知情報が感知器の信号、ベースライン(基準値、例えば接触されないときの信号又は最初の信号)を引いた感知器の信号の結果、前記値がADCで変わる後の結果、前記値が他表示方式の値に変わる後の結果、を含むだけことではないこと知っている。言い換えれば、感知情報は信号の形で、記憶媒体(例えばレジスタ、メモリ、磁気ディスク、光ディスク)に記録される、電気信号から変わるか、電気信号に変わることができる状態で存在する。しかし、アナログ又はデジタル方式も含まれるが、これに限らず。
【0064】
感知情報は、異なる軸方向に関する2つの一次元(1-D)感知情報として提供されることができる。2つの一次元(1-D)感知情報は、タッチ装置上で第一軸(例えば縦軸)と第二軸(例えば横軸)に関する感知情報を意味する。それぞれ、第一軸および第二軸の方向で位置検知のために使われる。そして、第一軸および第二軸での一次元(1-D)位置を提供するが、さらにそれらを組み合わせて二次元の位置を構成する。そのうえ、2つの一次元(1-D)感知情報は、感知器の間の距離に基づく三角測量のために使われ、タッチ装置上で二次元の位置が測定されることもできる。
【0065】
感知情報は、1つの二次元(2-D)の感知情報であり、又は同じ軸上で複数の一次元(1-D)感知情報から成る二次元の感知情報である。1つの二次元の感知情報は、二次元の平面で信号の分布を意味することができる。例えば、縦軸に複数の一次元の感知情報又は横軸に複数の一次元の感知情報は、1つの信号マトリックスを意味する。分水嶺(watershed algorithm)というアルゴリズム又はその他画像処理方式によって位置の測定を行うことができる。
【0066】
本発明の一つの例に、タッチ装置上の感知区域は、少なくとも1つの第一感知器が感じる第一の二次元(2-D)の感知範囲と少なくとも1つの第二感知器が感じる第二の二次元(2-D)の感知範囲との重なり合う範囲を含む。当業者は感知区域が3つ以上の2-Dの感知範囲の重なり合う範囲でありうるとも認めるかもしれない。
【0067】
たとえば、一つの感知器の感知範囲は、二次元の感知範囲であり、カメラに基づく光学センサー(例えばCCDまたはCMOSセンサー)または表面弾性波検知による圧電センサーは、二次元の感知範囲中で一次元の感知情報を得る。この一次元の感知情報は複数の連続時点に感知情報から成ることができる。そして、異なる時点は角度、位置または範囲に対応する。そのうえ、一次元の感知情報は、時間間隔の中で得られる(例えばCCDまたはCMOSセンサーで)画像によって生成することができる。
【0068】
更に、たとえば、二次元の感知範囲は、複数の感知器の感知範囲から成る。たとえば、各々の赤外線の光受容器、静電容量方式又は電気抵抗方式検知の線状又は帯状の導電バーまたは磁気のU-形コイルの感知範囲は、1つの軸方向に沿う扇形又は帯状の感知範囲である。ラインセグメント(直線又は弧)上で同じ軸に配置される複数の感知器の感知範囲は、その軸の二次元の感知範囲を構成することができる。それは矩形または扇形の平面又は弧面の感知範囲である。
【0069】
本発明の好ましい例に、タッチ装置上の感知区域は、第一軸および第二軸の方向で複数の感知器で感知される二次元の範囲を含む。たとえば、自己容量方式(self-capacitive detection)検知を通して、駆動信号は複数の第一感知器に提供され、そして、第一感知器の第一の二次元の感知範囲で容量カップリング信号の変化を測定し、第一の一次元の感知情報が得られる。そのうえ、駆動信号は複数の第二感知器に提供され、そして、第二感知器の第二の二次元の感知範囲で容量カップリング信号の変化を測定し、第二の一次元の感知情報が得られる。
【0070】
本発明のもう一つの例に、タッチ装置上の感知区域は、複数の感知器が感じる二次元の感知範囲の複数の一次元の感知情報からなる二次元の感知情報を含む。たとえば、信号源が第一軸で順に駆動信号を感知器に印加するとき、順に第二軸で少なくとも1つの感知器の信号を測定し、または同時に複数(部分的に、または、すべて)の感知器の信号を測定し、そして、この軸上にある二次元の感知情報が得られる。そのうち、感知器は第二軸で少なくとも1つの隣接している感知器であり、または第二軸で少なくとも1つの隣接していない感知器である。たとえば、相互容量検知またはアナログのマトリックス電気抵抗検知において、複数の感知器は、各々の感知所を構成し、それぞれ感知所で感知情報を測定する。たとえば、複数の第一感知器(例えば複数の第一導電ワイヤ)と複数の第二感知器(例えば複数の第二導電ワイヤ)は重なり、複数の重なり合う領域を構成する。駆動信号が交替に第一感知器の各々順に印加されるとき、駆動信号が印加する第一感知器に対し、順に第二軸で少なくとも1つの感知器の信号を測定し、または同時に複数(部分的に、または、すべて)の感知器の信号を測定し、そして、第一感知器に対する一次元の感知情報が得られる。さらに、第一軸で一次元の感知情報を集めることによって、二次元の感知情報が得られる。本発明の例に、二次元の感知情報は、1つの画像と考えられていることができる。
【0071】
当業者は、本発明がタッチセンシティブディスプレイ、たとえば、前記の抵抗、容量、表面の音波方式検知付きまたは他のタッチ検知付きデバイス(またはタッチ感知装置と呼ばれる))に適用されると認めることができる。このように、タッチ表示装置又はタッチ装置で得られる感知情報は、タッチセンシティブ情報と考えられていることができる。
【0072】
本発明の一つの例に、タッチ装置は、異なる連続時点に、連続信号を使う。つまり、1つの感知器で、または、複数の感知器で同時に測定される複合信号は使用される。たとえば、タッチ装置は電磁式タッチ装置であり、電磁式タッチ装置上のコイルが連続的に発する電磁波は電磁ペンの上で1つ以上の感知器で感じられ、連続的に1つの信号を作る。この信号は、それからADCによって複数の連続信号値に変換される。あるいは、電磁ペンで発される電磁波、あるいは、電磁式タッチ装置から反射される電磁波はタッチ装置上の1つ以上の感知器(コイル)で感じられ、感知情報が得られる。
【0073】
〔タッチ関連情報〕
外部物体(例えば指)がタッチ装置と接触するか、接近するとき、電気特性または変化は外部物体が接触する相対位置の感知情報によって生成する。電気特性または変化がより大きいほど、それは外部物体のセンター(例えば質量重心、重心又は幾何中心)により間近である。それがデジタルであるかアナログであるかどうかにかかわらず、連続の感知情報は複数の連続の値によって構成されると、考えられている。外部物体のセンターは、1個、2個の値の間で対応するかもしれない。本発明では、複数個の連続の値は、空間的に、または、時間的に連続的でありうる。
【0074】
本発明により提供される第一種類の1-D感知情報は、複数の連続信号値の形であり、また、一つの時間間隔内で、複数の感知器で感じられる信号値、連続の時間間隔内で、一つの感知器で感じられる信号値、又は一つの時間間隔内で、一つの感知器での異なる場所の信号値である。感知情報を信号値に表す過程で、それぞれの感知器、時間間隔または位置による信号は信号値に順に変換される、あるいは、感知情報の一部または全体は得られ、その後、各々の信号値はそれから分析される。外部物体が感知装置と接触するか、接近するとき、1-D感知情報の連続信号値は図1Bで示すように、接触される位置は外部物体の感知情報のピーク14に対応し、ピーク14は2個の信号値の間に存在する。前記されるように、本発明は感知情報の形を制限しない。信号値は、感知器の信号のもう一つの形でありうる。説明の簡潔さのために、下記の本発明は、信号値の実施様態で記述される。当業者は、信号値の実施様態から、信号の実施様態を明らかに理解することができる。
【0075】
本発明により提供される第二種類の1-D感知情報は、複数の連続の差の形であり、前記信号値に対し、差の各々は一対の信号値の差であり、かつ複数の連続の差で示す感知情報は差動感知情報として考えられている。本発明では、差動感知情報は感知するとき直接に得られる。例えば、同時に、又は連続的に複数の信号を取り、差の各々は一対の感知器、時間間隔または位置に対応する差動信号によって生成する。差動感知情報は先に複数の信号値の原始感知情報を生成した後、原始感知情報によって生成する。前記のように、本発明は感知情報の形を制限しない。差は、差動信号のもう一つの形である。当業者は、差の実施様態から、差動信号の実施様態を明らかに理解することができる。
【0076】
本発明の例に、差は一対の隣接しているか隣接していない信号値の間の差であり、例えば、各信号値とその前の信号値の間の差であり、又は信号値とその後の信号値の差である。本発明のもう一つの例に、差は非隣接した信号値の間の差である。外部物体がタッチ装置と接触するか、接近するとき、1-D感知情報の連続差は図1Cで示すように、外部物体の位置は外部物体の感知情報の零交差箇所15に対応し、零交差箇所15は2個の信号値の間に存在する。本発明の一例に、タッチ装置上で、各差の相対位置は2個の信号値の間である。
【0077】
本発明により提供される第三種類の1-D感知情報は、複数の連続のデュアル差(二重差)の形であり、前記信号値又は差に対し、デュアル差の各々れは第一対の信号値の差と第二対の信号値の差との和又は差であり、つまり、二対の信号値の差の和又は差である。本発明の一つの例に、第一対の信号値の差は第一差であり、第二対の信号値の差は第二差であり、そして、デュアル差は第一差と第二差との差であり、そのうち、第一差と第二差は前の信号値から後の信号値を引いた差である。本発明のもう一の例に、第一対の信号値の差は第一差であり、第二対の信号値の差は第二差であり、そして、デュアル差は第一差と第二差との和であり、そのうち、第一差と第二差の1つは前の信号値から後の信号値を引いた差であり、もう1つは後の信号値から前の信号値を引いた差である。例えば、二対の信号値は順に第一信号値、第二信号値、第三信号値、第四信号値を含み、これに対し、4つの信号値に対するデュアル差は(第二信号値−第一信号値)+(第三信号値−第四信号値)、(第二信号値−第一信号値)−(第四信号値−第三信号値)、(第一信号値−第二信号値)+(第四信号値−第三信号値)、又は(第一信号値−第二信号値)−(第三信号値−第四信号値)である。その上、連続の複数のデュアル差からなる感知情報はデュアル差動感知情報として考えられている。本発明では、デュアル差が信号値または差を生成した後、生成するが、これに限らず。また、感知情報が提供されるとき二対の信号値を引算する後の和又は差を取り、二対の信号値の差の和又は差に相当するデュアル差動信号を提供することができる。前記のように、本発明は感知情報の形を制限しない。デュアル差は、感知器のデュアル差動信号のもう一つの形でありうる。当業者は、デュアル差の実施様態から、デュアル差動信号の実施様態を明らかに理解することができる。
【0078】
本発明の一つの例に、外部物体がタッチ装置と接触するか、接近するとき、二対の信号値は3個の隣接したか隣接していない信号値からなる。本発明の一つの例に、前2つの信号値の差と後2つの信号値の差それぞれは第一差と第二差であり、且つデュアル差は第一差と第二差との差である。そのうち、第一差と第二差は前の信号値から後の信号値を引いた差である。本発明のもう一つの例に、前2つの信号値の差と後2つの信号値の差それぞれは第一差と第二差であり、且つデュアル差は第一差と第二差との和である。そのうち、第一差と第二差の1つは前の信号値から後の信号値を引いた差であり、もう1つは後の信号値から前の信号値を引いた差である。例えば、二対の信号値は順に第一信号値、第二信号値、第三信号値を含み、3個の信号値に対するデュアル差は(第二信号値−第一信号値)+(第二信号値−第三信号値)、(第二信号値−第一信号値)−(第三信号値−第二信号値)、(第一信号値−第二信号値)+(第三信号値−第二信号値)又は(第一信号値−第二信号値)−(第二信号値−第三信号値)である。二対の信号値は3個の隣接した信号値から成るとき、外部物体がタッチ装置と接触するか、接近するとき、1-D感知情報の連続のデュアル差は、図1Dで示すように、外部物体の位置は外部物体の感知情報の中央ピーク16に対応し、中央ピーク16は2個の信号値の間に存在する。二対の信号値は3個の隣接していない信号値から成るとき、外部物体がタッチ装置と接触するか、接近するとき、1-D感知情報の連続のデュアル差は、図1Eで示すように、外部物体の位置は外部物体の感知情報の中央ピーク17に対応し、中央ピーク17は2個の信号値の間に存在する。
【0079】
本発明では、各々の感知器、時間間隔又は位置に対応する感知情報は感知器から感知した信号であり、この信号はアナログであるとき、ADC変換器(A/Dコンバーター、アナログ・デジタルコンバーター)によってデジタルの信号になる。従って、前記差も一対の信号の差であり、例えば、一対の信号を差動増幅器で引算した後の転換値が挙げられる。同様に、前記デュアル差は二対の信号を差動増幅器で引算した後加算又は引算の転換値である。当業者には、本発明の差とデュアル差が信号又は信号値から生成されることを含むと認めることができるが、これに限らず、ハードウェア又はソフトウェアで実施過程の記録(電気記録、磁気記録、光学記録)、信号又は信号値の一時的な状態も含むと認めることができる。
【0080】
言い換えれば、感知情報は感知器で又は感知器の間の信号、差動信号(例えば、一対の信号の差)、デュアル差動信号(例えば、二対の信号の差の和又は差)であり、信号値、差、デュアル差(ADCによって変換後の信号、差、デュアル差)はもう一つの形でありうる。説明の簡便のために、本発明の説明には、タッチ関連情報は外部物体が接触するか、接近する感知情報であり、例えば、タッチ関連情報として、原始タッチに関する感知情報、差動タッチ関連感知情報、デュアル差動タッチ関連感知情報が挙げられる。
【0081】
当業者は、差又はデュアル差において零交差箇所が少なくとも1つの正の値と少なくとも1つの負の値との間にあり、つまり、一対の正と負の値との間にある。外部物体が接触と接近に対する差又はデュアル差は連続の少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせである。少なくとも1つの正の値と少なくとも1つの負の値との間には少なくとも1つの零値が挿入されている。ほとんどの場合、外部物体が接触と接近に対する差又はデュアル差は連続の複数の正の値と複数の負の値との交互組み合わせであり、正と負の値との間にある零交差箇所は少なくとも1つの零値であり、又は2個の値(正の値と負の値)の間にある。
【0082】
比較すると、タッチ関連の信号値は、複数の連続の非ゼロ値(零ではない)またはその他非ゼロ値に隣接しない独立の非ゼロ値も、を含む。場合によっては、その他非ゼロ値に隣接しない独立の非ゼロ値は雑音(ノイズ)によって生成するかもしれない。そして、それはしきい値(閾値)によってまたはその他方法で確認されて、無視しなければならない。
【0083】
雑音(ノイズ)が大きいとき、外部物体が接触と接近に類似した零交差箇所が生じる恐れがある。従って、本発明の一つの例に、零値の範囲内の値は零値(ゼロ値)と認められる。外部物体が接触と接近に対する差又はデュアル差は連続の複数の正のしきい値により大きい値と負のしきい値により小さい値との交互組み合わせであり、正のしきい値により大きい値と負のしきい値により小さい値との間にある零交差箇所は少なくとも1つの零値であり、又は2個の値(正の値と負の値)の間にある。
【0084】
上述をまとめると、差動タッチ関連感知情報とデュアル差動タッチ関連感知情報は零交差箇所を含む連続の少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせである。そのうち、零交差箇所は少なくとも1つの零値であり、又は2個の値(正の値と負の値)の間にある。言い換えれば、本発明には、差動タッチ関連感知情報がデュアル差動タッチ関連感知情報中で正の値と負の値との間にある連続の複数の零値を零交差箇所とし、又は1つの零値を零交差箇所として考えられる。
【0085】
本発明の一つの例に、タッチ関連感知情報はまず、少なくとも1つの正の値又は負の値から始め、零交差箇所を含む連続の少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせが捜され、そのうち、零交差箇所は少なくとも1つの零値であり、又は少なくとも1つの正の値と少なくとも1つの負の値との間にある。タッチ関連の差動感知情報において、少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせは対称的に起こる。しかし、タッチ関連のデュアル差動感知情報において、少なくとも1つの正の値と少なくとも1つの負の値との交互組み合わせは対称的に起こらない。本発明のもう一つの例に、タッチ関連の感知情報は連続の非零値(ゼロではない)であり、例えば、連続の複数の非零の信号値が挙げられる。
【0086】
前記少なくとも1つの正の値は正の値からなる群であり、少なくとも1つの正の値を含む。同様に、前記少なくとも1つの負の値は負の値からなる群であり、少なくとも1つの負の値を含む。従って、前記交互組み合わせは正の値からなる群と負の値からなる群との組み合わせであり、又は3個以上の正の値からなる群と負の値からなる群との交互組み合わせである。本発明の一つの例に、零個、1個又は多個の正の値からなる群と負の値からなる群との間に少なくとも1つの零値がある。
【0087】
〔システムフレームワーク〕
より明らかに、本発明の感知情報を発生する方法について説明するために、本発明は例として静電容量タッチ装置を使い、そして、当業者は電気抵抗、赤外線、表面の音波または光学的タッチ装置に応用することがすぐに理解できると考えられる。
【0088】
図1Fを参照して、本発明は、位置検知装置100を提供する。図1Fで示すように、位置検知装置100は感知装置120と駆動/検知ユニット130を含む。感知装置120は、感知層を持つ。本発明の一つの例に、感知層は、第一感知層120Aと第二感知層120Bを含む。第一感知層120Aと第二感知層120Bそれぞれは、複数の感知器140を有し、そのうち、第一感知層120Aの複数の第一感知器140Aと第二感知層120Bの複数の第二感知器140Bは重なる。本発明のもう一つの例に、複数の第一感知器140Aと第二感知器140Bは同じ平面の感知層に配置されることができる。駆動/検知ユニット130は複数の感知器140の信号によって感知情報を生成する。例えば、自己容量を検知する場合、駆動された感知器140を測定し、また、相互容量を検知する場合、駆動/検知ユニット130で直接に駆動されない一部の感知器140を測定する。そのうえ、感知装置120は表示装置110上に配置され、感知装置120と表示装置110の間に奥遮蔽層(図示せず)が挿入されることができる。また、感知装置120と表示装置110の間に奥遮蔽層(図示せず)が挿入されてないこともできる。
【0089】
本発明の位置検知装置100は図1Gで示すようにコンピューティングシステムに適用されることができる。それはコントローラー160とホスト170を含む。コントローラーは、操作的に感知装置120(示されない)を結合させるために、駆動/検知ユニット130を含む。そのうえ、コントローラー160はプロセッサー161を含み、駆動/検知ユニット130は感知情報を生成し、その感知情報はメモリ162に保存され、プロセッサー161でアクセスできる。さらに、ホスト170はコンピューティングシステムの主体部であり、主に中央処理装置171と、中央処理装置171でアクセスされることができる記憶装置173と、演算結果を表示するための表示装置110を含める。
【0090】
本発明のもう一つの例に、コントローラー160とホスト170の間には伝送インターフェースがある。コントローラーは、伝送インターフェースによってデータをホストに送る。当業者には伝送インターフェースがUART、USB、I2C、Bluetooth(登録商標)、WiFi等有線または無線伝送インターフェースを含むことが知っているが、これに限定されるものではないかもしれないと認めることができる。本発明の一つの例に、送られるデータは位置(例えば座標)、識別結果(例えばジェスチャコード)、命令、感知情報又はコントローラー160により提供される情報である。
【0091】
本発明の一つの例に、感知情報はプロセッサー161の制御で生成される最初の感知情報であり、それの位置分析をホスト170で、行う。例えば、位置分析、ジェスチャ識別、命令識別を行う。本発明のもう一つの例に、感知情報はプロセッサー161で先に分析を行い、そして、識別した位置、ジェスチャ、命令等をホスト170に転送する。本発明はこの例に対する制限をしない、そして、当業者はコントローラー160とホスト170の間でその他インタラクションをすぐに理解することができる。
【0092】
図2Aを参照して、本発明の一つの例において、駆動/検知ユニット130は、駆動ユニット130Aと検知ユニット130Bを含むこともできる。感知装置120の複数の感知器140は、複数のワイヤによって操作的に駆動/検知ユニット130に結合する。図2Aの例に、駆動ユニット130Aと検知ユニット130Bは、ワイヤW1によって感知器140Aに、そして、ワイヤW2によって感知器140Bに操作的に結合する。
【0093】
たとえば、自己容量検知において、駆動ユニット130AはワイヤW1を通して、第一期間に、順に、または、同時にすべての感知器140Aを駆動させる、あるいは、同時に感知器140Aのいくつかをバッチで駆動させる。検知ユニット130BはワイヤW1を通して、感知器140Aの信号によって第一軸で感知情報(1-D感知情報)を生成する。同様に、駆動ユニット130AはワイヤW2を通して、第二期間に、順に、または、同時にすべての感知器140Bを駆動させる、あるいは、同時に感知器140Bのいくつかをバッチで駆動させる。検知ユニット130BはワイヤW2を通して、感知器140Bの信号によって第二軸で感知情報(1-D感知情報)を生成する。
【0094】
たとえば、相互容量検知において、駆動ユニット130AはワイヤW2を通して、第一期間に、順にすべての感知器140Bを駆動させる。感知器140Bの各々はそれぞれ駆動されるとき、検知ユニット130BはワイヤW1を通して、感知器140Aの信号によって駆動される感知器における第一軸での1-D感知情報を生成する。それら第一軸での1-D感知情報は第一軸での2-D感知情報(又は画像)になる。同様に、駆動ユニット130AはワイヤW1を通して、第二期間に、順にすべての感知器140Aを駆動させる。感知器140Aの各々はそれぞれ駆動されるとき、検知ユニット130BはワイヤW2を通して、感知器140Aの信号によって駆動される感知器における第二軸での1-D感知情報を生成する。それら第二軸での1-D感知情報は第二軸での2-D感知情報(又は画像)になる。そのうえ、駆動ユニット130Aと検知ユニット130Bは、経路132を通して、信号を提供することによって、同期することができる。経路132の信号は、プロセッサー1600で提供されることができる。
【0095】
図2Bを参照して、感知装置120は一つの軸だけに関する二次元の感知情報を生み出すこともできる。この例では、感知器140BはワイヤW2によって順に駆動される。そして、各々の感知器140Bがそれぞれ駆動されるとき、検知ユニット130BはワイヤW1を通して、感知器140Aの信号によって駆動される感知器における1-D感知情報を生成する。それら1-D感知情報は2-D感知情報(又は画像)を構成する。
【0096】
言い換えれば、本発明の位置検知装置100は、2つの軸の1-D感知情報または2つの軸の2-D感知情報を生じる機能を備え、あるいは、2つの軸の1-D感知情報と2-D感知情報を生じる機能を備える。また、本発明の位置検知装置100は1つの軸の2-D感知情報を生じることができる。本発明は静電容量方式位置検知装置を含むが、これに限定されるものではないかもしれない。例えば、当業者は電気抵抗方式、静電容量方式、赤外線方式、表面の音波方式、光学方式ようなタッチ装置の応用はできることを容易に理解できる。
【0097】
図3Aを参照して、前記検知ユニット130Bは、ワイヤ(例えばW1)によって、感知装置に操作的に結合する。操作的に結合することはスイッチング回路310で実施されることができる。そして、スイッチング回路はは一つ以上の電気素子(例えばマルチプレクサやスイッチ)からなる。当業者は、他のスイッチング回路の使用を理解することができる。感知器140の信号は、検出回路320で感知されることができる。検出回路320での出力がアナログ信号であるとき、ADC回路330で変わり、感知情報SIが得られる。感知情報SIはアナログまたはデジタルでありうる。本発明の好ましい例に、感知情報SIはデジタルである、しかし、本発明は上記の例に限られていないである。当業者は、検出回路320とADC回路330が一つ以上の回路で集積されることができると認めることができる。
【0098】
検出回路320は一つ以上の検出器から成ることができる。そして、各々が少なくとも1つの感知器140から信号を受け取って、出力を生み出す。検出器は、図3B乃至3Dで示される検出器340、350と360でありうる。
【0099】
本発明の一つの例に、感知器140の信号の検出は、積分器によって成し遂げられることができる。当業者は、例えばADCのように他の回路が電気特性(例えば電圧、電流、容量、インダクタンス等)を測ることができると理解できる。積分器は増幅器Cintによって実行されることができる。そして、それは1つの入力と(例えば図3Bの積分器322で示すように)または一対の入力と(例えば図3Cと3Dの積分器324で示すように)、出力とを含む。出力信号はADC回路330で感知情報SIの値を生み出し、これらの値の各々はリセット信号(例えば図3B乃至3Dで示されるリセット信号Sreset)によって制御されることができる。
【0100】
本発明のもう一つの例に、感知器140の信号は、一対の半周期によって異なる交流(AC)信号である。このように、感知器140の信号の検知も、異なる半周期で変わる。たとえば、感知器140の信号は前の半周期に検知され、そして、感知器140の逆信号は後の半周期に検知され、または、その逆も同じ検知される。したがって、図3Bと3Cで示すように、感知器140の信号の検知は、同期信号Ssyncによって制御されることができる。同期信号Ssyncと感知器140の信号は、同期においてあるか、同じ周期を持っている。たとえば、同期信号Ssyncは、一つ以上のスイッチ(例えばスイッチング回路321、323、325)を制御し、基準点P1とP2の間でスイッチングし、前の半周期に感知器140の信号を検知し、そして、後の半周期に感知器140の逆信号を検知する。図3Bの中で、逆信号はインバータCinvによって提供される。
【0101】
本発明のさらにもう一つの例に、感知器140の信号の検知は、少なくとも1つの周期で少なくとも所定の時間間隔(または位相)に実行される。検知は、前の半周期中で少なくとも1つの時間間隔にと後の半周期中で少なくとも1つの時間間隔に実行され、あるいは前の半周期又は後の半周期だけでの少なくとも1つの時間間隔に実行される。本発明の好ましい例に、少なくとも、1つの周期中で信号が好ましい少なくとも1つの時間間隔を検知間隔として走査する。そのうち、検知間隔は他の時間間隔に比べ、ノイズ影響が少ない間隔である。検知間隔の走査(スキャン)は、少なくとも1つの周期で各間隔に少なくとも1つの感知器の信号の検知で判断されることができる。検知間隔を決定すると、すぐに、感知器140の信号の検知はその検知間隔だけに実行される。そして、これは信号(例えば図3B乃至3Dでイネーブル信号Senable)によって制御されることができる。
【0102】
本発明は、少なくとも1つの感知器140の信号に基づく、感知情報SIの値を生み出す。本発明の一つの例に、感知情報SIは、複数の信号値から成る。図3Bで示すように、入力311は信号を検知するために感知器140に操作的に結合し、そして、感知情報SIの信号値はADC回路330によって生成する。本発明のもう一つの例に、感知情報SIは、複数の差から成る。図3Cで示すように、一対の入力312と313は差動信号を検知するために一対の感知器140に操作的に結合し、、そして、感知情報SIの差(または単差)はADC回路330によって生成する。本発明のさらにもう一つの例に、感知情報SIは、複数の二重差から成る。本発明のもう一つの例に、複数の二重差から成る。図3Dで示すように、3つの入力314、315と316は二重差動信号を検知するために3個の感知器140に操作的に結合し、そして、感知情報SIの二重差はADC回路330によって生成する。二重差動信号は、一対の差動信号の差から生成し、各々の差動信号は、一対の感知器の信号に基づいて生成する。言い換えれば、二重差動信号は第一対の感知器の信号と第二対の感知器の信号に基づいて生成し、そして、第一対の感知器は3つの感知器中で前2つの感知器であり、且つ第二対の感知器は3つの感知器中で後2つの感知器であり、そのうち、これらの3つの感知器は隣接していることができるか、隣接していないこともできる。
【0103】
本発明の好ましい例に、検出回路320は複数の検出器を含む。そして、それは同時に、感知情報SIの全てまたは一部の値を生み出すことができる。図3E乃至3Jで示すように、検出回路320は検出器340、350または360からなることができる。検出器の出力は、それから、ADC回路330で感知情報SIの値に変わる。
【0104】
ADC回路330は、少なくとも1つのADCを含む。図3E、3G、3Iで示すように、各々のADCは、1つの検出器だけの出力に基づく感知情報SIの値を出力する。あるいは、図3F、3H、3Jで示すように、ADCは順番にいくつかの検出器の出力に基づく感知情報SIの値を出力する。感知情報SIの値が、平行に生成することができるか、直列であることができる。本発明の好ましい例に、感知情報SIの値は直列に生成し、そして、それはスイッチング回路370で達成されることができる。たとえば、図3E、3G、3Iで示すように、順番に複数のADCから感知情報SIの値を出力する。または、図3F、3H、3Jで示すように、順番に複数の積分器の出力を一つのADCに送ることによって、感知情報SIの値を生み出す。
【0105】
したがって、本発明の例において、複数の感知器の信号に基づく、複数の信号値を有する感知情報SIを生成する。図3B、3Eと3Fで示すように、各々の信号値は、1つの感知器から信号に基づいて生成する。そこで、本発明のもう一つの例に、複数の感知器の信号に基づく、複数の差を有する感知情報SIを生成する。図3C、3Gと3Hで示すように、各々の差は、一対の感知器から信号に基づいて生成する。本発明のさらにもう一つの例に、複数の感知器の信号に基づく、複数の二重差を有する感知情報SIを生成する。図3D、3Iと3Jで示すように、各々の二重差は、3つの感知器から信号に基づいて生成する。
【0106】
図3E〜3JFの中で、検出器を接続するワイヤは、ワイヤW1とワイヤW2を含むが、これに限定されるものではないかもしれない。積分器とワイヤ間の接続は、直接的または間接的で良く、図3Aで示すように、スイッチング回路によっても良い。本発明の一つの例に、感知情報SIの値は少なくとも検出回路320の検出器で複数回検出によって生成する。検出回路320は、検出ために検出器のいくつかをスイッチング回路310によって選ぶ。そのうえ、選ばれた検出器だけは、駆動ユニット130Aによって駆動される(たとえば、自己容量検知において)。さらに、選ばれた検出器と選ばれた検出器に隣接した若干の検出器だけは、駆動ユニット130Aによって駆動されることも良い。
【0107】
本発明の第一範例に、感知情報はデュアル差動回路で得られることができる。そして、図3D、3Iと3Jで示すように、デュアル差動回路は第一級差動回路、第二級差動回路と測定回路を含む。
【0108】
第一級差動回路は、一対または複数の第一減算器(例えばスイッチング回路325の差動増幅器)を含む。第一減算器の各々は、これらの感知器で一対の感知器によって第一級差動信号を生み出す。
【0109】
そのうえ、第二級差動回路は、一対または複数の第二減算器(例えば積分回路324の積分器)を含む。第二減算器の各々は、これらの第一級差動信号で一対の第一級差動信号によって第二級差動信号を生み出す。
【0110】
さらに、測定回路は図3Aで示すように、ADC回路であり、また、図3Dで示すように積分器324とADC回路との組合せからなる。または、測定回路は図3Iで示すように、複数の積分器324、複数のADC回路とスイッチング回路370との組合せからなる。また、図3Dまたは図3Jで示すように、これらの第二級差動信号は測定回路にとって複数の時点に測られる、あるいは、図3Iで示すように、これらの第二級差動信号は測定回路にとって一つの時点に測られる。
【0111】
本発明の図3D、3Iと3Jで、差動積分器324によって信号の引算と測定を同時に行う。信号の測定はADC回路でデジタル信号を生み出すことを更に含み、しかし、これらに限られていない。前記関連の図面と説明は単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0112】
前記デュアル差動回路で、感知情報の各々の値がこれらの第二級差動信号の1つによって生成し、且つ第二級差動信号の各々は一対の第一級差動信号の第一差信号と第二差信号によって生成し、そのうち、第一差信号は、それらの感知器で第一感知器と第二感知器の信号によって生成し、また、第二差信号は、それらの感知器で前記第二感知器と第三感知器の信号によって生成する。言い換えれば、感知情報の各々の値は、これらの感知器で3つの感知器の信号に対応する。
【0113】
本発明の第二範例に、感知情報は差動回路で得られることができる。そして、図3C、3Gと3Hで示すように,差動回路は一つまたは複数の減算器と測定回路を含む。これらの減算器に、各々の減算器は、一対の感知器の信号によって、差動信号を生み出す。測定回路は、これらの差動信号を測って、差動感知情報を生成し、そのうち、感知情報の各値は差動感知情報の一対の値の差である。
【0114】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Cまたは図3Hで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Gで示すように、これらの第二級差動信号は一つの時点に測定される。
【0115】
図3C、3Gと3Hで、減算器と測定回路の一部は、積分器324にとって実施されることができる。前記図面と説明は、単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0116】
そのうえ、感知情報の各値は第一差と第二差との差であり、第一差信号はそれらの感知器で第一感知器と第二感知器との信号によって生成され、且つ第二差信号はそれらの感知器で前記第二感知器と第三感知器との信号によって生成される。言い換えれば、感知情報の各値は、これらの感知器で3つの感知器の信号に対応する。
【0117】
本発明の第三範例に、図3B、3Eと3Fで示すように,感知情報は測定回路で得られることができる。測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの感知器の信号を測ってから、最初感知情報を生成する。感知情報は、最初感知情報によって生成し、そのうち、感知情報の各値は最初感知情報の3個の値から生成する。
【0118】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Bまたは図3Fで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Eで示すように、これらの第二級差動信号は一つの時点に測定される。
【0119】
感知情報の各値は第一差と第二差との差又は和であり、そのうち、第一差は最初感知情報の3個の値で前2つの値の差であり、且つと第二差は最初感知情報の3個の値で後2つの値の差である。言い換えれば、最初感知情報の3個の値はそれぞれ第一値、第二値と第三値であり、感知情報の各値は(第二値−第一値)−(第三値−第二値)、(第一値−第二値)−(第二値−第三値)、(第二値−第一値)+(第二値−第三値)又は(第一値−第二値)+(第三値−第二値)である。前記最初感知情報の各値はこれらの感知器の一つの信号によって生成される。言い換えれば、感知情報の各値は最初感知情報の3つの感知器の信号に対応する。
【0120】
本発明の一つの例に、感知情報で各々のタッチ関連の感知情報は2つの零交差箇所を持って、そして、外部物体によって接触されるか、接近される位置はタッチ関連の感知情報にとって判断される。本発明のもう一つの例に、タッチ関連の感知情報は情報が始めである部分又は最後部分で配置される。外部物体はタッチ装置の検知できる区域の外縁だけと接触するか、接近するとき、2つの零交差箇所がない、そして、例外処理は必要とされる。
【0121】
さらに、前記時点は、一つ以上のクロックまたは一つ以上のクロックの部分を経過することを含むが、これに限定されるものではないかもしれない。
【0122】
さらにまた、前記感知情報の獲得と生成は、コントローラー160で実行されることができる。前記デュアル差動回路、差動回路と測定回路は、コントローラー160で実行されることができる。
【0123】
本発明では、感知器は複数の導電性シートと接続ワイヤからなり、例えば、ワイヤで一緒につながれる一組の菱形又は四角形導電性シートからなることができる。構造的に、第一感知器140Aと第二感知器140Bの導電性シートは、異なるか同じ平面に配置されるかもしれない。たとえば、第一感知層120Aと第二感知層120Bの間には絶縁層又はピエゾ抵抗(piezoresistive)層を介し、ピエゾ抵抗(piezoresistive)層は異方性の導電性ゲルから作られる。さらに、たとえば、第一感知器140Aと第二感知器140Bの導電性シートは略同じ平面に配置される。第一感知器140Aの接続ワイヤは第二感知器140Bの接続ワイヤを越える。そのうえ、第一感知器140Aの接続ワイヤと第二感知器140Bの接続ワイヤの間にはパッドが配置されることができる。これらのパッドは、絶縁材質であるか、ピエゾ抵抗(piezoresistive)な材料でできていることがありうる。
【0124】
このように、本発明の例において、各々の感知器は1つの感知範囲に対して役割があり、感知範囲は複数の感知器で感知される。これらの感知器は複数の第一感知器と複数の第二感知器を含み、これらの第一感知器の感知範囲は互いと平行に配置され、かつ、これらの第二感知器の感知範囲は互いと平行に配置される。これらの第一感知器および第二感知器の平行感知範囲は交差し、1つの交差マトリックスを構成する。たとえば、これらの第一感知器および第二感知器は赤外線受信器であり、水平にと垂直に配置される平行感知範囲を走査する。そのうち、水平にと垂直に配置される平行感知範囲は1つの交差マトリックスを構成する。また、例えば、前記水平にと垂直に配置される平行感知範囲は互いに交差的に配置される静電容量式または電気抵抗式複数の感知器にとって実施されることができる。
【0125】
〔感知情報の変換〕
前記感知情報の信号値、差と二重差は、お互いに変わることができる。本発明により提供される第一の変換方法では、連続の信号値が連続の差に変わり、各々の差は一対の隣接したか非隣接した信号値の差である。
【0126】
本発明により提供される第二の変換方法では、連続の信号値は連続の二重差に変わり、各々の二重差は二対の信号値の差の和または差である。
【0127】
本発明により提供される第三の変換方法では、連続の差は、連続の信号値に変わり、各々の差はその前又は後の差を加えて、それに対応する信号値を取り、それによって連続の信号値を造る。
【0128】
本発明により提供される第四の変換方法では、連続の差は、連続の二重差に変わり、各々の二重差は、隣接したか非隣接した一対の差の和(合計)または差である。
【0129】
本発明により提供される第五の変換方法では、連続の二重差は連続の差に変わり、各々の二重差にその前又は後のすべての二重差を加えて、それに対応する信号値を取って、それによって連続の差を造る。
【0130】
本発明により提供される第六の変換方法では、連続の二重差は、連続の信号値に変わる。本発明の一つの例に、各々の二重差にその前のすべての二重差を加えて、それによって連続の差を造って、さらに、各々の差からその後のすべての差を引いて、それによって連続の信号値を造る。本発明のもう一つの例に、各々の二重差からその前のすべての二重差を引いて、それによって連続の差を造って、さらに、各々の差にその後のすべての差を加えて、それによって連続の信号値を造る。
【0131】
対応する信号値または差を生成するために、前記各々の二重差にその前又は後のすべての差又は二重差を加えることは、前へ又は奥への加算又は引算の蓄積方式によって実行される。
【0132】
前記変換方法は1-D感知情報の変換を含むが、これに限定されるものではないかもしれない、当業者は上記の変換方法が二次元の感知情報または三次元以上(またはさらに次元の)感知情報に適用されることができると認めることができる。そのうえ、当業者は、上記の変換方法が前記コントローラー160またはホスト170によって実行されることができると認めることができる。
【0133】
したがって、本発明の一つの例において、第一形式の感知情報(例えば1-Dまたは2-Dの感知情報)を感知し、位置分析のために感知情報に変わる。本発明のもう一つの例に、感知した第一形式の感知情報を第二形式の感知情報に変わる。それから、第二形式の感知情報は位置分析のために感知情報に変わる。たとえば、連続の二重差は連続の信号値に変わる。
【0134】
〔一次元位置分析〕
本発明により提供される第一種類の位置分析は、外部物体に対応する位置として感知情報で複数の差に基づく零交差箇所(zero-crossing)の位置を分析する。当業者は位置分析が外部物体によるタッチ又は接近の決定ことを含むが、これに限定されるものではないかもしれないと認めることができる。つまり、外部物体に対応する位置の決定はタッチ又は接近の決定を含むが、これに限定されるものではないかもしれない。
【0135】
本発明の一つの例に、正と負の値を含む一対の近隣の差(つまり、零交差箇所の両側の一対の正と負の値)は捜され、それから、この一対の近隣の差の間に零交差箇所の位置は測定される。たとえば、この一対の近隣の差によって傾斜度を決定し、それから零交差箇所の位置を判断する。そのうえ、正と負の値の出現順序が、近隣の差の間に零交差箇所の位置の判断と、一緒に使われることができる。前記近隣の差は互いに隣接した差であり、または、それの間に少なくとも1つの零値を含む隣接しない差である。そのうえ、1つの予め配列順序でこの一対の近隣の差が捜される。例えば、先に正の値を捜してから、負の値が出現し、一対の近隣の正と負の値を求めることができる。
【0136】
本発明のもう一つの例に、閾値(しきい値)は検索の開始位置を測定するために使われる。そこから、正と負の値を含む一対の近隣の差は捜され、それから、零交差箇所の位置はこの一対の近隣の差に基づいて測定される。当業者は、差が表す感知情報中で、外部物体によるタッチまたは接近に対応する感知情報は正の閾値より大きいとき、又は負の閾値より小さいとき、これらの閾値を使っている検索は外部物体によるタッチまたは接近の決定を含むが、これに限定されるものではないかもしれないと認めることができる。言い換えれば、感知情報が捜される過程で、感知情報は正の閾値より大きいとき、又は負の閾値より小さいとき、感知情報で外部物体によるタッチまたは接近に対応する零交差箇所は存在する。
【0137】
たとえば、閾値を使って正の値の差に対応する二進値を生み出す。たとえば、閾値より小さい(例えば正の閾値)差は0又は偽値(false)で表し、かつ閾値より大きい差は1又は真値(true)で表す。隣接した差が10での1又は真値の位置は開始位置であり、零交差箇所の検索方向は後ろへの方向である。同様に、閾値より大きい(例えば負の閾値)差は0又は偽値(false)で表し、閾値より小さい差は1又は真値(true)で表す。隣接した差が01での1又は真値の位置は開始位置であり、零交差箇所の検索方向は前への方向である。
【0138】
たとえば、表1と図4Aは、閾値を使って外部物体によるタッチまたは接近を測定するの例である。
【0139】
【表1】
【0140】
この例は、15個の感知器に対応する信号値と差値を含み、かつ正閾値T1(例えば4)と負閾値T2(例えば-4)を使っている判断結果を表す。正閾値を使用する判断結果で、開始位置は4番目および10番目の差であり、つまり、隣接した差10の1の位置である。図の中で、縦縞バーによる例として、2つの外部物体による接近又はタッチがあることを分かる。同様に、負閾値を使用する判断結果で、つまり、開始位置は隣接した差01の1の位置であり、つまり、5番目および12番目の差であり、図の中で、横縞バーによる例として、2つの外部物体による接近又はタッチがあることを分かる。当業者は、開始位置の数が外部物体による接近又はタッチの数に対応することを分かる。本発明は本範例の2つの外部物体による接近又はタッチの数に制限しない、また、より多くがあることができる。
【0141】
本発明のもう一つの例に、零交差箇所を捜す区間は第一閾値と第二閾値を使って決定され、それは外部物体による接近又はタッチことを含むが、これに限定されるものではないかもしれない。それから、区間内で零交差箇所を捜す。たとえば、第一閾値を使って正の値の差に対応する二進値を生成する。例えば、閾値より小さい差は0又は偽値(false)で表し、且つ閾値より大きい差は1又は真値(true)で表し、また、隣接した差が10での1の位置は開始位置である。そのうえ、例えば、第二閾値を使って負の値の差に対応する二進値を生成する。例えば、閾値より大きい差は0又は偽値(false)で表し、且つ閾値より大きい差は1又は真値(true)で表し、また、隣接した差が01での1の位置は終了位置である。また、開始位置及び終了位置を対にし(組み合わせ)、零交差箇所を捜す区間は決定される。本発明のもう一つの例に、開始位置と終了位置の間に傾斜度によって零交差箇所を決定する。当業者は、前記開始位置及び終了位置が交換されることができることを分かる。当業者は、開始位置が01での1の位置であり、且つ終了位置が10での1の位置であることによってタッチ関連の感知情報を決定することができることを理解する。
【0142】
例えば、もう一度、図4Aと表1で例として、第一の零交差箇所を捜す区間は4番目および5番目の差の間にあることを明らかになる。そして、対にする後の第二の零交差箇所を捜す区間は10番目および12番目の差の間にある。
【0143】
当業者は、正の閾値の検索と負の閾値の検索が同時に実行されることができる(または平行な処理)と認めることができる。区間の組合せは、1つの開始位置を決定した後、すぐに決定される終了位置及び該当開始位置対にすることによって実行されることができる。
【0144】
本発明の一つの例に、閾値は感知情報によって発生することができる。たとえば、閾値はすべての差の絶対値の最大値と割合(例えば割合1未満(例えば0.9))を乗算することで測定されることができ、あるいは、正閾値はすべての正の差の最大値と割合を乗算することで測定されることができ、あるいは、負閾値はすべての負の差の最小値と割合を乗算することで測定されることができる。言い換えれば、閾値は固定又は動態である。このように、閾値の絶対値が比較的大きいとき、外部物体による接近又はタッチは正閾値の検索とき決定されるかもしれない、しかし、負閾値の検索とき決定されることができない。この逆も、同じである。比較的大きい閾値はノイズ又はゴースト点(ghost)を除去するとき、都合が良い。また、比較的小さい閾値は本当の外部物体によるタッチの誤判を避けるために、都合が良い。
【0145】
以上から、同じ外部物体による接近又はタッチについて、正閾値を使って前方向へ捜すか、負閾値を使って後ろへ捜すとき、開始位置を決定し、同じ零交差箇所を得ることができる。そして、本発明の一つの例において、正閾値と負閾値を使って開始位置を捜し、該当開始位置によって零交差箇所を捜し、捜された零交差箇所の数によって、外部物体による接近又はタッチの数を判断し、さらに、零交差箇所の位置を確認する。外部物体による接近又はタッチに対応する零交差箇所の両側の値の一対の正と負の値は前が正値で、後が負値であるとき、正閾値によって判断された開始位置は後ろへ捜すときの零交差箇所であり、また、負閾値によって判断された開始位置は前方向へ捜すときの零交差箇所である。この逆も、同じである。そのうえ、同じ外部物体による接近又はタッチによって、正閾値と負閾値を使って開始位置を捜しでも、開始位置を必ずしも示さないかもしれない。
【0146】
本発明により提供される第二種類の位置分析は、感知情報で複数の信号値又は二重差に基づく、外部物体に対応する位置として、重心位置(重さまたは加重平均位置)を分析することが必要である。
【0147】
本発明の一つの例に、図4B乃至4Dで示すように、閾値は重心位置の信号値または二重差を決定するのに用いられる。閾値によって、信号値または二重差に対応する二進値を生み出すことができる。たとえば、閾値より小さな信号値または二重差は0又は偽値(false)で表し、閾値より大きな信号値または二重差は1又は真値(true)で表す。この例では、1又は真値によって意味される信号値または二重差は、重心位置を決定する際に使われる。当業者は、閾値を使って信号値の重心位置又は二重差を測定するための他の方法を分けることができる。たとえば、1又は真値によって意味される信号値または二重差及び両側の隣接した複数の信号値または二重差は重心位置を決定する際に使われる。また、例えば、隣接した連続の1又は真値によって意味される信号値または二重差で相対的に中心の信号値または二重差から前又は奥へi個とj個の信号値または二重差を、重心位置を決定する際に使われる信号値または二重差とする。
【0148】
本発明のもう一つの例に、中心の信号値または二重差として零交差箇所に対応する信号値または二重差を分析ために、連続の信号値または二重差は連続の差に変わる。そして、中心の信号値または二重差の前後のi個とj個の信号値または二重差は重心位置を決定するために使われる。
【0149】
本発明のもう一つの例に、零交差箇所は連続の差で分析され、そして、連続の差は連続の信号値または二重差に変わり、それから、零交差箇所に対応する信号値または二重差は確認され、中心の信号値または二重差とする。その後、中心の信号値または二重差の前後のi個とj個の信号値または二重差は重心位置を決定するために使われる。
【0150】
重心計算範囲として第n番目の信号値の前後にそれぞれi個とj個の信号値を使うと仮定して、重心位置は、以下の通りに重心計算範囲で各々の信号値Ckとその位置Xkに基づいて測定されることができる:
【0151】
【数1】
【0152】
そこで、Xkは1-D(一次元)座標(例えばXまたはY座標)または二次元の座標(例えば(X、Y))である。
【0153】
第(k-1)番目の信号値と第k番目の信号値との差がDkであるならば、そして、第k番目の二重差はDDk=Dk−1−Dk=(Ck−Ck−1)−(Ck+1−Ck)=2Ck−Ck−1+Ck+1である。そして、重心計算範囲として第n番目の二重差の前後にそれぞれi個とj個の信号値を使うならば、重心位置DDcentroid は以下の通りに重心計算範囲で各々の二重差DDkに基づいて測定されることができる:
【0154】
【数2】
【0155】
そこで、Xkは1-D(一次元)座標(例えばXまたはY座標)または二次元の座標(例えば(X、Y))である。当業者は、第k番目の二重差はDDk=(Ck−Ck−2)−(Ck+2−Ck)=2Ck−Ck−2+Ck+2であるとき、同様に重心位置計算することもできる。これは、さらに記述されない。
【0156】
本発明のもう一つの例に、重心位置を測定するために使われる信号値または二重差は、最初に基準値を引くことで得られる。たとえば、この基準値は、すべての信号値または二重差の平均値、重心位置を測定するために使われる信号値または二重差の両側の複数の信号値または二重差の平均値、または重心位置を測定するために使われる信号値または二重差の両側の隣接している複数の重心位置を測定するために使われない信号値または二重差の平均値が挙げられる。当業者は、それからその他基準値の決定方式と認めることができる。例えば、基準値は、一方の少なくとも1つの信号値または二重差の第一割合及び他方の少なくとも1つの信号値または二重差の第二割合に基づいて測定されることができる。
【0157】
基準値として第n番目の信号値の前後にそれぞれ第i番目の信号値Cn−iと第j番目の信号値Cn+jの平均をする(Cbase(i,j)(Cbase(i,j)=(Cn−i+Cn+j)/2))及び重心計算範囲として第n番目の信号値の前後にそれぞれi個とj個の信号値を使うと仮定して、重心計算範囲で各々の信号値Ckから基準信号値Cbase(i,j)を引いて計算信号値(Ck-Cbase(i,j))とし、重心位置Ccentroid は以下の通りに得られる:
【0158】
【数3】
【0159】
そこで、Xkは1-D(一次元)座標(例えばXまたはY座標)または二次元の座標(例えば(X、Y))である。
【0160】
本発明により提供される第三種類の位置分析は、感知情報で複数の差に基づく、外部物体に対応する位置として、重心位置(重さまたは加重平均位置)を分析することが必要である。
【0161】
第(k-1)番目の信号値Ck-1と第k番目の信号値Ckとの差がDkである。
【0162】
【数4】
【0163】
したがって、重心位置(Ccentroid)は、信号値間の差によって計算されることができる。そのうち、重心計算範囲での差はDn-(i-1),Dn-(i-2),..., Dk, Dk+1,...,Dn+j,Dn+(j+1)である。言い換えれば、重心位置(Ccentroid)は、重心計算範囲での差に基づいて計算されることができる。
【0164】
例えば、第n番目の信号値の前後の1つの信号値によって重心位置(Ccentroid)を決定することと考えられるならば、重心計算範囲での差(たとえば、Dn-1、Dn、Dn+1、Dn+2等)の計算は以下の通り:
【0165】
【数5】
【0166】
当業者は、前記重心計算範囲の方法が重心位置の信号値、差または二重差を決定するために適用されることを認めることができる。
【0167】
上記の説明から、本発明は感知情報の分析によって位置検知を行い、感知情報が最初得られた信号値、差または二重差を含むが、これに限りだけでないかもしれない。しかし、また、信号値、差または二重差は最初得られた感知情報から変わるかもしれない。それによって、同じ外部物体に対応する2本の異なる軸(例えばXとY軸)の一次元又は二次元の感知情報を分析によって、つまり、2本の異なる軸(例えばXとY軸)の一次元又は二次元の位置分析によって、外部物体が2本の異なる軸上での位置は得られ、それから、二次元の位置(二次元の座標)は造られることができる。
【0168】
当業者は、上記の一次元の位置分析の操作は前記コントローラー160またはホスト170によって行われることができると認めることができる。
【0169】
〔二次元位置分析〕
二次元の感知情報は複数の一次元の感知情報からなり、そのうち、一次元(1-D)の感知情報の各々は複数の第一の1-D位置に対応する感知情報を含み、そして、一次元(1-D)の感知情報の各々は1つの第二の1-D位置に対応する。このように、二次元の位置分析は、複数の1-Dタッチ感知情報を一次元の位置分析で実施し、つまり、二次元の位置分析は複数回の一次元の位置分析を少なくとも含むことができる。
【0170】
そのうえ、本発明の第一例において、外部物体における第一の1-D位置に対応する感知情報での第一の1-D重心位置は、二次元の位置(例えば、二次元の座標(第一の一次元の重心位置、第一の1-D感知情報の第二の1-D位置))であり、外部物体の二次元の重心位置(または幾何中心)がそれによって得られる。そのうち、一次元の重心位置の加重値の各々は外部物体における第一の1-D感知情報での信号値又は二重差(例えば、第一の1-D感知情報で最近隣の1-D重心位置の両信号値又は二重差の1つ、または平均値、内挿値)であり、あるいは、外部物体における第一の1-D感知情報での信号値又は二重差の合計である。
【0171】
このように、二次元の位置分析は各々の第一の次元の感知情報で一次元の位置分析を実行することができ、各々の外部物体における少なくとも1つの二次元の位置に基づく、各々の外部物体の二次元の重心位置を分析することができる。
【0172】
また、本発明の第二例において、二次元の位置分析は、第一軸(第一の一次元(1-D))で複数の1-D感知情報それぞれを一次元の位置分析で実行することができる。各々の外部物体における第一軸に対する少なくとも1つの1-D位置によって、各々の外部物体における第一軸での重心位置を分析することができる。同様に、二次元の位置分析は、第二軸(第二の一次元(1-D))で複数の1-D感知情報それぞれを一次元の位置分析で実行することができる。各々の外部物体における第二軸に対する少なくとも1つの1-D位置によって、各々の外部物体における第二軸での重心位置を分析することができる。各々の外部物体における第一軸での重心位置及び各々の外部物体における第二軸での重心位置を対にするにとって、各々の外部物体における二次元(2-D)の重心位置を分析することができる。
【0173】
言い換えれば、二次元の位置分析は、2本の異なる軸での感知情報(例えば、第一軸での2-D感知情報、第二軸での2-D感知情報)によって、一次元の位置分析を実行し、そして、各々の外部物体における二次元(2-D)の位置を分析することができる。
【0174】
また、本発明の第三例において、二次元の位置分析は、第一軸での複数の1-D感知情報で各々の外部物体における一次元(1-D)の重心位置を分析し、各々の1-D感知情報に対応する二次元(2-D)の位置によって、第一軸で各々の外部物体における一次元の重心位置が決定されることができる。また、二次元の位置分析は、第二軸での複数の1-D感知情報で各々の外部物体における一次元(1-D)の重心位置を分析し、各々の1-D感知情報に対応する二次元(2-D)の位置によって、第二軸で各々の外部物体における一次元の重心位置が決定されることができる。そらに、二次元の位置分析は、第一軸と第二軸で各々の外部物体における一次元の重心位置にとって、二次元(2-D)の重心位置が決定されることができる。
【0175】
当業者は、二次元の感知情報が画像処理で各々の外部物体の位置を測定することができると認めることができる。たとえば、分水嶺(watershed algorithm)というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。他の例として、分水嶺というアルゴリズムは各々の分水嶺の位置を分析し、それから、各々の分水嶺の位置に近く感知情報を使って重心位置はより正確な位置を得る計算される。
【0176】
本発明の第四例に、最初得られる複数の1-D感知情報は信号値または二重差で表し、そして、それは二次元の感知情報から作られる画像(またはマトリックス)を造る。分水嶺(watershed algorithm)というアルゴリズム又はその他画像処理技術は、位置分析のために使われることができる。あるいは、「連結成分」というアルゴリズムが使われることができる。そして、それは画像の中で関連のある部分を分析し、各々の外部物体の画像を決定し、さらに物体(例えば指、ヤシまたはペン)の位置またはタイプを決定する。
【0177】
本発明の第五例に、最初得られる複数の1-D感知情報は差で表し、さらにそれから信号値または二重差に変わり、そして、それは二次元の感知情報から作られる画像(またはマトリックス)を造る。また、分水嶺というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。
【0178】
本発明の第六例に、最初得られる複数の1-D感知情報は差で表し、各々の1-D感知情報の位置を分析によって、各々の零交差箇所の位置及び各々の零交差箇所での信号値または二重差を決定でき、そして、それは二次元の感知情報から作られる画像(またはマトリックス)を造る。また、分水嶺というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。
【0179】
零交差箇所の二重差は2つの直接隣接した差によって生成することができる。たとえば、零交差箇所は第k-1個の差と第k個の差の間にあり、そして、この零交差箇所の二重差はDDk=Dk-1-Dkである。零交差箇所の信号値は、すべての1-D感知情報の差を信号値に変えた後生成することができるか、零交差箇所に最も近い複数の差に基づいて生成することができる。例えば、零交差箇所は第n番目の信号値に最も近い、そして、第n番目の信号値の前後に第i個の信号値Cn-iと第j個の信号値Cn+jの平均は基準値Cbase(i,j)(Cbase(i,j)(Cbase(i,j)=(Cn−i+Cn+j)/2))とし、それから、信号値は以下の通り:
【0180】
【数6】
【0181】
言い換えれば、第n-(i-1)個差〜第n+j個の間の差によって、零交差箇所の信号値が決定される。
【0182】
本発明の第七例に、最初得られる複数の1-D感知情報は信号値と二重差で表し、さらにそれから差に変わる。各々の1-D感知情報の位置を分析によって、各々の零交差箇所の位置を決定でき、各々の零交差箇所での信号値または二重差と一緒に二次元の感知情報から作られる画像(またはマトリックス)を造る。また、分水嶺というアルゴリズム又はその他画像処理方式によって位置分析を行うことができる。
【0183】
本発明の第八例に、第一軸に関する二次元の感知情報を得るところで、また過程中で、第二軸に関する1-D感知情報も得られる。第一軸に関する二次元の感知情報において位置分析を実行した後、各々の外部物体の第一軸での1-D位置または2-D位置は、得られることができる。そのうえ、第二軸に関する1-D感知情報において位置分析を実行した後、各々の外部物体の第二軸での1-D位置は得られることができる。第二軸での1-D位置は第一軸での1-D位置を組み合わせて、2-D位置に成れる。また、それは第一軸での2-D位置中で第二軸の位置を代わるか、修正するのに用いられることができる。
【0184】
当業者は、上記の二次元の位置分析の操作は前記コントローラー160またはホスト170によって行われることができると認めることができる。そのうえ、本発明の一つの例において、同じ外部物体による接近又はタッチに対応する各々の1-D重心位置と、少なくとも1つの他の同じ外部物体による接近又はタッチに対応する各々の1-D重心位置との1-D距離又は2-D距離は閾値内である。本発明のもう一つの例に、同じ外部物体による接近又はタッチに対応する各々の1-D重心位置の加重値は閾値より大きいである。
【0185】
以下の説明では、タッチ関連の感知情報は感知情報中で1つのタッチ関連の感知情報又は複数のタッチ関連の感知情報うちの1つである。タッチ関連の感知情報の操作は特定のタッチ関連の感知情報に適用されることができ、また本発明のすべてのタッチ関連の感知情報に適用されることもできる。しかし、本発明はこれに限らない。
【0186】
図5を参照して、本発明の第一の実施例について、デュアル差動感知方法は、例示される。まず、ステップ510において、複数の感知器付きの感知装置は、提供される。それから、ステップ520において、感知情報は、得される。感知情報の値の各々は複数の感知器中で3つの感知器の信号に対応する。その後、ステップ530において、感知装置で外部物体によって接触されるか、接近される位置は、感知情報に基づいて決定される。
【0187】
本発明の第一範例に、感知情報はデュアル差動回路で得られることができる。そして、図3D、3Iと3Jで示すように、デュアル差動回路は第一級差動回路、第二級差動回路と測定回路を含む。
【0188】
第一級差動回路は、一対または複数の第一減算器(例えばスイッチング回路325の差動増幅器)を含む。第一減算器の各々は、これらの感知器で一対の感知器によって第一級差動信号を生み出す。
【0189】
そのうえ、第二級差動回路は、一対または複数の第二減算器(例えば積分回路324の積分器)を含む。第二減算器の各々は、これらの第一級差動信号で一対の第一級差動信号によって第二級差動信号を生み出す。
【0190】
さらに、測定回路は図3Aで示すように、ADC回路であり、また、図3Dで示すように積分器324とADC回路との組合せからなる。または、測定回路は図3Iで示すように、複数の積分器324、ADC回路とスイッチング回路370との組合せからなる。また、図3Dまたは図3Jで示すように、これらの第二級差動信号は測定回路にとって複数の時点に測定される、あるいは、図3Iで示すように、これらの第二級差動信号は測定回路にとって一つの時点に測定される。
【0191】
本発明の図3D、3Iと3Jで、差動積分器324によって信号の引算と測定を同時に行う。信号の測定はADC回路でデジタル信号を生み出すことを更に含み、しかし、これらに限られていない。前記関連の図面と説明は単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0192】
前記デュアル差動回路で、感知情報の各値がこれらの第二級差動信号の1つによって生成し、且つ第二級差動信号の各々は一対の第一級差動信号の第一差信号と第二差信号によって生成し、そのうち、第一差信号は、それらの感知器で第一感知器と第二感知器の信号によって生成し、また、第二差信号は、それらの感知器で前記第二感知器と第三感知器の信号によって生成する。言い換えれば、感知情報の各値は、これらの感知器で3つの感知器の信号に対応する。
【0193】
本発明の第二範例に、感知情報は差動回路で得られることができる。そして、図3C、3Gと3Hで示すように,差動回路は一つまたは複数の減算器と測定回路を含む。これらの減算器に、各々の減算器は、一対の感知器の信号によって、差動信号を生み出す。測定回路は、これらの差動信号を測って、差動感知情報を生成し、そのうち、感知情報の各々の値は差動感知情報の一対の値の差である。
【0194】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Cまたは図3Hで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Gで示すように、これらの第二級差動信号は一つの時点に測定される。
【0195】
図3C、3Gと3Hで、減算器と一部の測定回路は、積分器324にとって実施されることができる。前記図面と説明は、単に本発明の一つの例だけであり、これらに限られていない、本発明は、当業者は信号の引算と測定が異なる回路(たとえば、先に減算器、それから積分器による)で実行されることができると認めることができる。そして、それは詳細でさらに記述されない。
【0196】
そのうえ、感知情報の各値は第一差と第二差との差であり、第一差信号はそれらの感知器で第一感知器と第二感知器との信号によって生成され、且つ第二差信号はそれらの感知器で前記第二感知器と第三感知器との信号によって生成される。言い換えれば、感知情報の各値は、これらの感知器で3つの感知器の信号に対応する。
【0197】
本発明の第三範例に、図3B、3Eと3Fで示すように,感知情報は測定回路で得られることができる。測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの感知器の信号を測ってから、最初感知情報を生成する。感知情報は、最初感知情報によって生成し、そのうち、感知情報の各値は最初感知情報の3個の値から生成する。
【0198】
さらに、測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの第二級差動信号を測る。例えば、図3Bまたは図3Fで示すように、これらの第二級差動信号は複数の時点に測定される、あるいは、図3Eで示すように、これらの第二級差動信号は一つの時点に測定される。
【0199】
感知情報の各値は第一差と第二差との差又は和であり、そのうち、第一差は最初感知情報の3個の値で前2つの値の差であり、且つと第二差は最初感知情報の3個の値で後2つの値の差である。言い換えれば、最初感知情報の3個の値はそれぞれ第一値、第二値と第三値であり、感知情報の各々の値は(第二値−第一値)−(第三値−第二値)、(第一値−第二値)−(第二値−第三値)、(第二値−第一値)+(第二値−第三値)、又は(第一値−第二値)+(第三値−第二値)である。前記最初感知情報の各々の値はこれらの感知器の一つの信号によって生成される。言い換えれば、感知情報の各値は最初感知情報の3つの感知器の信号に対応する。
【0200】
本発明の一つの例に、感知情報で各々のタッチ関連の感知情報は2つの零交差箇所を持って、そして、外部物体によって接触されるか、接近される位置はタッチ関連の感知情報にとって判断される。本発明のもう一つの例に、タッチ関連の感知情報は情報が始めである部分又は最後部分で配置される。外部物体はタッチ装置の検知できる区域の外縁だけと接触するか、接近するとき、2つの零交差箇所がない、そして、例外処理は必要とされる。
【0201】
さらに、前記時点は、一つ以上のクロックまたは一つ以上のクロックの部分を経過することを含むが、これに限定されるものではないかもしれない。
【0202】
さらにまた、前記感知情報の獲得と生成は、コントローラー160で実行されることができる。前記デュアル差動回路、差動回路と測定回路は、コントローラー160で実行されることができる。
【0203】
図6を参照して、本発明の第二の実施例による可撓性感知装置の感知方法は、提供される。まず、ステップ610において、複数の感知器付きの可撓性感知装置は表示装置で設置され、可撓性感知装置が複数の感知器を備え、感知器の信号値は表示装置からノイズ影響は該感知器と前記表示装置の間の距離に対応する。それから、ステップ620において、感知情報は得られ、感知情報の値の各々の表示装置からノイズ影響は感知器で3つの感知器と表示装置の間の距離に対応する。
【0204】
図7Aを参照して、感知装置120は可撓性感知装置である。そのままのとき(接触されないとき)、感知装置120の第二感知層120Bの各部分と表示装置110の間の距離は距離d1である。接触されるとき、感知装置120は変形し、変形の程度は圧力によって異なり、そして、第二感知層120Bの各部分と表示装置110の間の距離はもはや均一でないようにある。例えば、ある部分と表示装置110の間の距離は、距離d1から距離d2に変わる。また、ある部分と表示装置110の間の距離は、距離d2より大きい距離に変わる。あるいは、ある部分と表示装置110の間の距離は、距離d2より小さい距離に変わる。
【0205】
図7Cを参照して、感知情報の各々の二重差は、3つの感知器の信号に対応する。たとえば、感知情報中の1つの値は、感知器140B-1、140B-2と140B-3に対応する。感知器140B-1、140B-2と140B-3の信号はそれぞれC1+N1、C2+N2とC3+N3である。C1、C2とC3は感知器140B-1、140B-2と140B-3のノイズ影響されない信号を表す。また、N1、N2とN3は感知器140B-1、140B-2と140B-3の表示装置110によるノイズ影響される信号を表す。
【0206】
N1、N2とN3はそれぞれ感知器140B−1、140B−2、140B−3と表示装置110の間の距離に対応する。それが表示装置110により間近であるほど、表示装置110のノイズ影響は、より大きい。言い換えれば、感知情報の各値に関する表示装置110によるノイズ影響は、感知器で3つの感知器と表示装置の間の距離に対応する。例えば、感知器140B−1、140B−2と140B−3に対応する二重差は((C1+N1)−(C2+N2))−((C2+N2)−(C3+N3))であり、そのうち、二重差のノイズ影響の成分は((N1−N2)−(N2−N3))である。(N1−N2)は感知器140B−1と140B−2間の高さ差であり、且つ(N2−N3)は感知器140B−1と140B−3間の高さ差である。3つの感知器は隣接しているので、(N1−N2)及び(N2−N3)は近い、そして、彼らの引算がノイズ影響を最小にすることができる。
【0207】
本発明の第一範例に、感知情報はデュアル差動回路で得られることができる。そして、図3D、3Iと3Jで示すように、デュアル差動回路は第一級差動回路、第二級差動回路と測定回路を含む。関連詳細は前記説明を参照することができ、そして、さらに記述されない。
【0208】
前記デュアル差動回路で、感知情報の各値が1つのノイズ値を含み、ノイズ値の各々は一対の第一級差動信号の第一差信号のノイズと第二差信号のノイズによって生成し、そのうち、第一差信号のノイズは、それらの感知器で第一感知器及び第二感知器と表示装置の間の距離差に対応し、また、第二差信号のノイズは、それらの感知器で前記第二感知器及び第三感知器と表示装置の間の距離差に対応する。
【0209】
本発明の第二範例に、感知情報は差動回路で得られることができる。そして、図3C、3Gと3Hで示すように,差動回路は一つまたは複数の減算器と測定回路を含む。これらの減算器中で、各々の減算器は、一対の感知器の信号によって、差動信号を生み出す。測定回路は、これらの差動信号を測って、差動感知情報を生成し、そのうち、感知情報の各値は差動感知情報の一対の値の差である。関連詳細は前記説明を参照することができ、そして、さらに記述されない。
【0210】
そのうえ、感知情報の各値が1つのノイズ値を含み、ノイズ値の各々は感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、そのうち、第一ノイズ差はそれらの感知器で第一感知器及び第二感知器と表示装置の間の距離差に対応し、また、第二ノイズ差は、それらの感知器で前記第二感知器及び第三感知器と表示装置の間の距離差に対応する。
【0211】
本発明の第三範例に、図3B、3Eと3Fで示すように,感知情報は測定回路で得られることができる。測定回路は、感知情報を生み出すために、一つまたは複数の時点にこれらの感知器の信号を測ってから、最初感知情報を生成する。感知情報は、最初感知情報によって生成し、そのうち、感知情報の各値は最初感知情報の3個の値から生成する。関連詳細は前記説明を参照することができ、そして、さらに記述されない。
【0212】
感知情報の各値は第一差と第二差との差又は和であり、そのうち、第一差は最初感知情報の3個の値で前2つの値の差であり、且つと第二差は最初感知情報の3個の値で後2つの値の差である。最初感知情報の各々の値の表示装置によるノイズ影響は感知器の1つと表示装置の間の距離に対応する。
【0213】
本発明の一つの例に、感知情報で各々のタッチ関連しない感知情報の表示装置によるノイズ影響は1つの零値範囲内である。さらに、前記時点は、一つ以上のクロックまたは一つ以上のクロックの部分を経過することを含むが、これに限定されるものではないかもしれない。
【0214】
さらにまた、前記感知情報の獲得と生成は、前記コントローラー160で実行されることができる。前記デュアル差動回路、差動回路と測定回路は、コントローラー160で実行されることができる。
【0215】
以上の実施例は本発明を説明するために提示されたものであり、本発明の範囲を制限するものではなく、本発明の要旨より離脱せずに当業者がなしうる各種の変更或いは修飾することは、本発明の請求範囲に属するものとする。
【符号の説明】
【0216】
10 タッチ表示装置
11 コントローラー
12 外部物体センサー
100 位置検知装置
110 表示装置
120 感知装置
120A、120B 感知層
140 感知器
14、16、17 ピーク
15 零交差箇所
130 駆動/検知ユニット
130A 駆動ユニット
130B 検知ユニット
160 コントローラー
161 プロセッサー
162 メモリ
170 ホスト
171 中央処理装置
173 記憶装置
310 スイッチング回路
311、312、313、314、315 入力
320 検出回路
321、323、325 スイッチング回路
322、324 積分器
340、350、360 検出器
330 ADC回路
Cint 増幅器
P1、P2 基準点
SI 感知情報
Senable イネーブル信号
Ssync 同期信号
Sreset リセット信号
W1、W2 ワイヤ
【特許請求の範囲】
【請求項1】
複数の感知器を含む感知装置を提供する工程と
感知情報を得る工程と、を含み、
そのうち、前記感知情報中での各値は3つの感知器の信号に対応することを特徴とする、デュアル差動感知方法。
【請求項2】
第一級差動回路と、第二級差動回路と測定回路とを含む1つのデュアル差動回路を提供する工程を更に含み、
そのうち、前記第一級差動回路は一対または複数個の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項3】
前記感知情報中での各値は前記第二級差信号中の1つから生成され、
前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、
前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項2記載のデュアル差動感知方法。
【請求項4】
前記感知器中から一対の感知器の信号によって1つの差信号を生成する1つ又は複数の減算器と、1つ又は複数の測定時点で前記差信号の各々を測定して1つの差動感知情報を生成する測定回路とを含む1つの差動回路を提供する工程と、
前記差動感知情報によって前記感知情報を生成する工程とを更に含み、
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項5】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項4記載のデュアル差動感知方法。
【請求項6】
前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、
前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項4記載のデュアル差動感知方法。
【請求項7】
1つ又は複数の測定時点で前記感知器の信号を測定して1つの最初感知情報を生成する測定回路を提供する工程と、
前記最初感知情報によって前記感知情報を生成する工程とを更に含み、
そのうち、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項8】
前記感知情報中の各の値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差である、ことを特徴とする請求項7記載のデュアル差動感知方法。
【請求項9】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項7記載のデュアル差動感知方法。
【請求項10】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、
外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項11】
複数の感知器を含む感知装置と、感知情報を得る1つの制御装置と、を備え、
前記感知情報中での各値は3つの感知器の信号に対応することを特徴とする、デュアル差動感知装置。
【請求項12】
第一級差動回路と、第二級差動回路と測定回路とを含む1つのデュアル差動回路を更に備え、
前記第一級差動回路は一対または複数個の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項11記載のデュアル差動感知装置。
【請求項13】
前記感知情報中での各値は前記第二級差信号中の1つから生成され、
前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、
前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項12記載のデュアル差動感知装置。
【請求項14】
1つ又は複数の減算器と、測定回路とを含む1つの差動回路を更に備え、
前記減算器の各々は前記感知器中から一対の感知器の信号によって1つの差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、
前記制御装置は前記差動感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項11記載のデュアル差動感知装置。
【請求項15】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項14記載のデュアル差動感知装置。
【請求項16】
前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、
前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項14記載のデュアル差動感知装置。
【請求項17】
1つの測定回路を更に備え、
そのうち、前記測定回路は1つ又は複数の測定時点で、前記感知器の信号を測定し、1つの最初感知情報を生成し、
前記制御装置は前記最初感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成されることを特徴とする請求項11記載のデュアル差動感知装置。
【請求項18】
前記感知情報中の各の値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差である、ことを特徴とする請求項17記載のデュアル差動感知装置。
【請求項19】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項17記載のデュアル差動感知装置。
【請求項20】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、
外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される、ことを特徴とする請求項11記載のデュアル差動感知装置。
【請求項21】
表示装置上に可撓性感知装置を提供する工程と、
感知情報を得る工程と、を含み、
そのうち、前記可撓性感知装置は複数の感知器を含み、
前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、
前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する、ことを特徴とする可撓性感知装置の感知方法。
【請求項22】
1つのデュアル差動回路を提供する工程を更に含み、
そのうち、デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、
前記第一級差動回路は一対または複数の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって1つの第二級差信号を生成し、
前記測定回路は1つまたは複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項21記載の可撓性感知装置の感知方法。
【請求項23】
前記感知情報中の各値は1つのノイズ値を含み、
ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、
前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項22記載の可撓性感知装置の感知方法。
【請求項24】
前記感知器中の一対の感知器の信号によって1つの差信号を生成する1つまたは複数の減算器と、1つ又は複数の測定時点で前記差信号の各々を測定して1つの差動感知情報を生成する測定回路とを含む1つの差動回路を提供する工程と、
前記差動感知情報によって前記感知情報を生成する工程を更に含み、
そのうち、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項21記載の可撓性感知装置の感知方法。
【請求項25】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項24記載の可撓性感知装置の感知方法。
【請求項26】
前記感知情報中の各値はそれぞれ1つのノイズ値を含み、
ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、
前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項24記載の可撓性感知装置の感知方法。
【請求項27】
1つ又は複数の測定時点で前記感知器の信号を測定して1つの最初感知情報を生成する1つの測定回路を提供する工程と、
前記最初感知情報によって前記感知情報を生成する工程とを更に含み、
そのうち、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される、ことを特徴とする請求項21記載の可撓性感知装置の感知方法。
【請求項28】
前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、
前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する、ことを特徴とする請求項27記載の可撓性感知装置の感知方法。
【請求項29】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項27記載の可撓性感知装置の感知方法。
【請求項30】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による1つの零値範囲にある、ことを特徴とする請求項27記載の可撓性感知装置の感知方法。
【請求項31】
表示装置と可撓性感知装置と制御装置を備え、
前記可撓性感知装置は複数の感知器を含み、
前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、
前記制御装置は感知情報を得り、前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する、ことを特徴とする可撓性感知装置の感知システム。
【請求項32】
第一級差動回路と、第二級差動回路と測定回路とを含むデュアル差動回路を更に備え、
前記第一級差動回路は一対または複数の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって1つの第二級差信号を生成し、
前記測定回路は1つまたは複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【請求項33】
前記感知情報中の各値は1つのノイズ値を含み、
ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、
前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項32記載の可撓性感知装置の感知システム。
【請求項34】
1つまたは複数の減算器と、測定回路とを含む差動回路を更に備え、
前記減算器の各々は前記感知器中の一対の感知器の信号によって1つの差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、
前記制御装置は前記差動感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【請求項35】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項34記載の可撓性感知装置の感知システム。
【請求項36】
前記感知情報中の各値はそれぞれ1つのノイズ値を含み、
ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、
前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項34記載の可撓性感知装置の感知システム。
【請求項37】
1つの測定回路を更に備え、
前記測定回路は1つ又は複数の測定時点で、前記感知器の信号の各々を測定し、1つの最初感知情報を生成し、
前記制御装置は前記最初感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【請求項38】
前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、
前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する、ことを特徴とする請求項37記載の可撓性感知装置の感知システム。
【請求項39】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項37記載の可撓性感知装置の感知システム。
【請求項40】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による1つの零値範囲にある、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【請求項1】
複数の感知器を含む感知装置を提供する工程と
感知情報を得る工程と、を含み、
そのうち、前記感知情報中での各値は3つの感知器の信号に対応することを特徴とする、デュアル差動感知方法。
【請求項2】
第一級差動回路と、第二級差動回路と測定回路とを含む1つのデュアル差動回路を提供する工程を更に含み、
そのうち、前記第一級差動回路は一対または複数個の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項3】
前記感知情報中での各値は前記第二級差信号中の1つから生成され、
前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、
前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項2記載のデュアル差動感知方法。
【請求項4】
前記感知器中から一対の感知器の信号によって1つの差信号を生成する1つ又は複数の減算器と、1つ又は複数の測定時点で前記差信号の各々を測定して1つの差動感知情報を生成する測定回路とを含む1つの差動回路を提供する工程と、
前記差動感知情報によって前記感知情報を生成する工程とを更に含み、
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項5】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項4記載のデュアル差動感知方法。
【請求項6】
前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、
前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項4記載のデュアル差動感知方法。
【請求項7】
1つ又は複数の測定時点で前記感知器の信号を測定して1つの最初感知情報を生成する測定回路を提供する工程と、
前記最初感知情報によって前記感知情報を生成する工程とを更に含み、
そのうち、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項8】
前記感知情報中の各の値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差である、ことを特徴とする請求項7記載のデュアル差動感知方法。
【請求項9】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項7記載のデュアル差動感知方法。
【請求項10】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、
外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される、ことを特徴とする請求項1記載のデュアル差動感知方法。
【請求項11】
複数の感知器を含む感知装置と、感知情報を得る1つの制御装置と、を備え、
前記感知情報中での各値は3つの感知器の信号に対応することを特徴とする、デュアル差動感知装置。
【請求項12】
第一級差動回路と、第二級差動回路と測定回路とを含む1つのデュアル差動回路を更に備え、
前記第一級差動回路は一対または複数個の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって、1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって、1つの第二級差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項11記載のデュアル差動感知装置。
【請求項13】
前記感知情報中での各値は前記第二級差信号中の1つから生成され、
前記第二級差信号の各々は該一対第一級差信号の第一差信号と第二差信号から生成され、
前記第一差信号はそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差信号はそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項12記載のデュアル差動感知装置。
【請求項14】
1つ又は複数の減算器と、測定回路とを含む1つの差動回路を更に備え、
前記減算器の各々は前記感知器中から一対の感知器の信号によって1つの差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、
前記制御装置は前記差動感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項11記載のデュアル差動感知装置。
【請求項15】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項14記載のデュアル差動感知装置。
【請求項16】
前記感知情報中の各値はそれぞれ前記差動感知情報中の第一差と第二差との差であり、
前記第一差がそれぞれ前記感知器中の第一感知器と第二感知器との信号によって生成され、
前記第二差がそれぞれ前記感知器中の前記第二感知器と第三感知器との信号によって生成される、ことを特徴とする請求項14記載のデュアル差動感知装置。
【請求項17】
1つの測定回路を更に備え、
そのうち、前記測定回路は1つ又は複数の測定時点で、前記感知器の信号を測定し、1つの最初感知情報を生成し、
前記制御装置は前記最初感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成されることを特徴とする請求項11記載のデュアル差動感知装置。
【請求項18】
前記感知情報中の各の値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差である、ことを特徴とする請求項17記載のデュアル差動感知装置。
【請求項19】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項17記載のデュアル差動感知装置。
【請求項20】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、
外部物体による接近又は接触される位置は、タッチ関連の感知情報それぞれによって判断される、ことを特徴とする請求項11記載のデュアル差動感知装置。
【請求項21】
表示装置上に可撓性感知装置を提供する工程と、
感知情報を得る工程と、を含み、
そのうち、前記可撓性感知装置は複数の感知器を含み、
前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、
前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する、ことを特徴とする可撓性感知装置の感知方法。
【請求項22】
1つのデュアル差動回路を提供する工程を更に含み、
そのうち、デュアル差動回路は第一級差動回路と、第二級差動回路と測定回路とを含み、
前記第一級差動回路は一対または複数の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって1つの第二級差信号を生成し、
前記測定回路は1つまたは複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項21記載の可撓性感知装置の感知方法。
【請求項23】
前記感知情報中の各値は1つのノイズ値を含み、
ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、
前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項22記載の可撓性感知装置の感知方法。
【請求項24】
前記感知器中の一対の感知器の信号によって1つの差信号を生成する1つまたは複数の減算器と、1つ又は複数の測定時点で前記差信号の各々を測定して1つの差動感知情報を生成する測定回路とを含む1つの差動回路を提供する工程と、
前記差動感知情報によって前記感知情報を生成する工程を更に含み、
そのうち、前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項21記載の可撓性感知装置の感知方法。
【請求項25】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項24記載の可撓性感知装置の感知方法。
【請求項26】
前記感知情報中の各値はそれぞれ1つのノイズ値を含み、
ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、
前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項24記載の可撓性感知装置の感知方法。
【請求項27】
1つ又は複数の測定時点で前記感知器の信号を測定して1つの最初感知情報を生成する1つの測定回路を提供する工程と、
前記最初感知情報によって前記感知情報を生成する工程とを更に含み、
そのうち、前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される、ことを特徴とする請求項21記載の可撓性感知装置の感知方法。
【請求項28】
前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、
前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する、ことを特徴とする請求項27記載の可撓性感知装置の感知方法。
【請求項29】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項27記載の可撓性感知装置の感知方法。
【請求項30】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による1つの零値範囲にある、ことを特徴とする請求項27記載の可撓性感知装置の感知方法。
【請求項31】
表示装置と可撓性感知装置と制御装置を備え、
前記可撓性感知装置は複数の感知器を含み、
前記各感知器の信号の前記表示装置によるノイズ影響は該感知器と前記表示装置の間の距離に対応し、
前記制御装置は感知情報を得り、前記感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の3つの感知器と前記表示装置の間の距離に対応する、ことを特徴とする可撓性感知装置の感知システム。
【請求項32】
第一級差動回路と、第二級差動回路と測定回路とを含むデュアル差動回路を更に備え、
前記第一級差動回路は一対または複数の第一減算器を含み、
前記第一減算器の各々は前記感知器中で一対の感知器の信号によって1つの第一級差信号を生成し、
前記第二級差動回路は1つまたは複数の第二減算器を含み、
前記第二減算器の各々は前記第一級差信号中で一対の第一級差信号によって1つの第二級差信号を生成し、
前記測定回路は1つまたは複数の測定時点で、前記第二級差信号を測定し、前記感知情報を生成する、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【請求項33】
前記感知情報中の各値は1つのノイズ値を含み、
ノイズ値の各々は該一対第一級差信号の第一差信号のノイズと第二差信号のノイズから生成され、
前記第一差信号のノイズは前記感知器中の第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二差信号のノイズは前記感知器中の前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項32記載の可撓性感知装置の感知システム。
【請求項34】
1つまたは複数の減算器と、測定回路とを含む差動回路を更に備え、
前記減算器の各々は前記感知器中の一対の感知器の信号によって1つの差信号を生成し、
前記測定回路は1つ又は複数の測定時点で、前記差信号の各々を測定し、1つの差動感知情報を生成し、
前記制御装置は前記差動感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値から生成される、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【請求項35】
前記感知情報中の各値はそれぞれ前記差動感知情報中の一対の値の差であることを特徴とする請求項34記載の可撓性感知装置の感知システム。
【請求項36】
前記感知情報中の各値はそれぞれ1つのノイズ値を含み、
ノイズ値の各々は前記差動感知情報中の第一差の第一ノイズ差と第二差の第二ノイズ差との差であり、
前記第一ノイズ差は前記感知器中から第一感知器、第二感知器と前記表示装置の間のそれぞれ距離差に対応し、
前記第二ノイズ差は前記感知器中から前記第二感知器、第三感知器と前記表示装置の間のそれぞれ距離差に対応する、ことを特徴とする請求項34記載の可撓性感知装置の感知システム。
【請求項37】
1つの測定回路を更に備え、
前記測定回路は1つ又は複数の測定時点で、前記感知器の信号の各々を測定し、1つの最初感知情報を生成し、
前記制御装置は前記最初感知情報によって前記感知情報を生成し、
前記感知情報中の各値はそれぞれ前記最初感知情報の3つの値から生成される、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【請求項38】
前記感知情報中の各値はそれぞれ第一差と第二差との差または和であり、
前記第一差は前記最初感知情報の3つの値うち前2つの値の差であり、
前記第二差は前記最初感知情報の3つの値うち後2つの値の差であり、
前記最初感知情報中の各値の前記表示装置によるノイズ影響は前記感知器中の1つと前記表示装置の間の距離に対応する、ことを特徴とする請求項37記載の可撓性感知装置の感知システム。
【請求項39】
前記最初感知情報の3つの値は第一値、第二値と第三値であり、前記感知情報の各値は(該第二値−該第一値)−(該第三値−該第二値)、(該第一値−該第二値)−(該第二値−該第三値)、(該第二値−該第一値)+(該第二値−該第三値)または(該第一値−該第二値)+(該第三値−該第二値)であることを特徴とする請求項37記載の可撓性感知装置の感知システム。
【請求項40】
前記感知情報中のタッチ関連の感知情報の各々は2つの零交差箇所を有し、前記感知情報中タッチ関連しない感知情報の各値はノイズ影響による1つの零値範囲にある、ことを特徴とする請求項31記載の可撓性感知装置の感知システム。
【図1A】

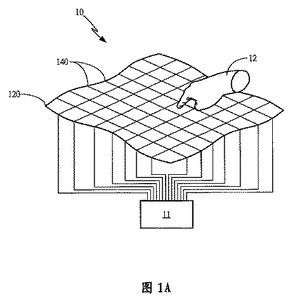
【図1B】
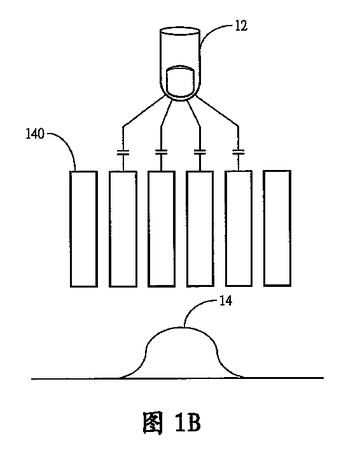
【図1C】
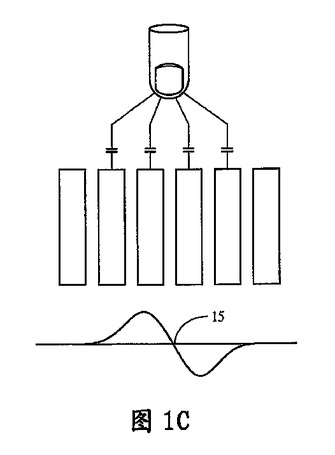
【図1D】
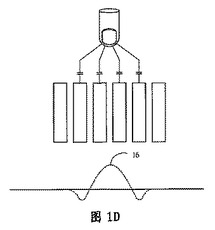
【図1E】
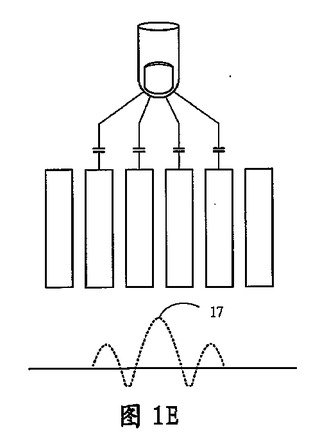
【図1F】
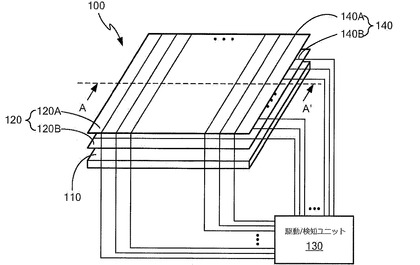
【図1G】
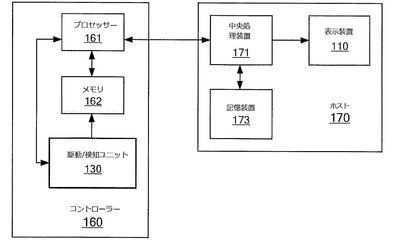
【図2A】
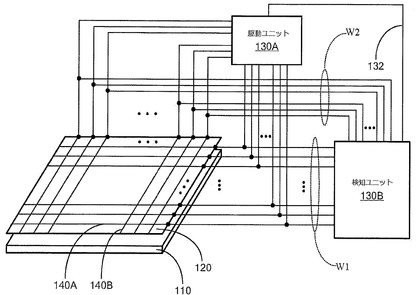
【図2B】
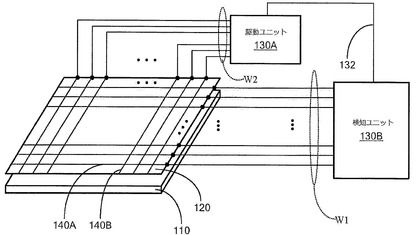
【図3A】
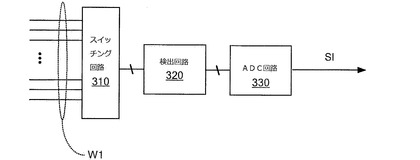
【図3B】
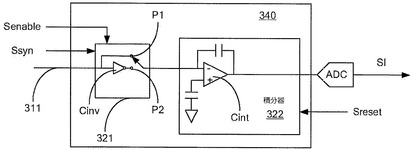
【図3C】
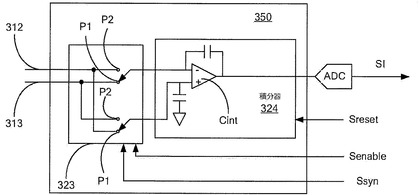
【図3D】
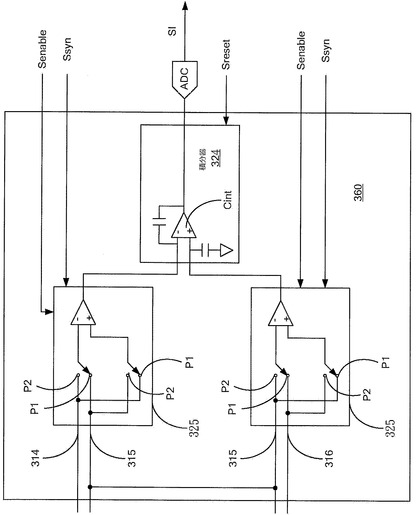
【図3E】
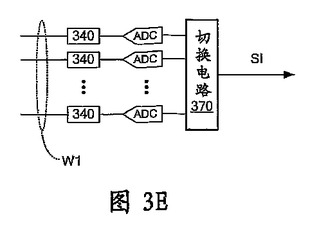
【図3F】
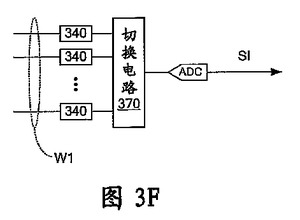
【図3G】
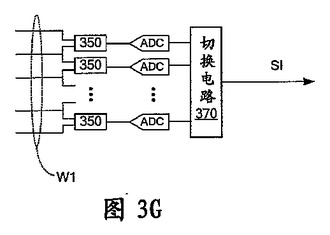
【図3H】
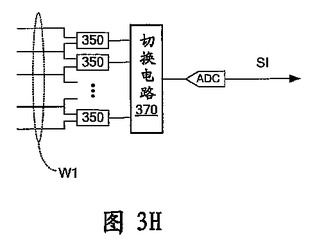
【図3I】
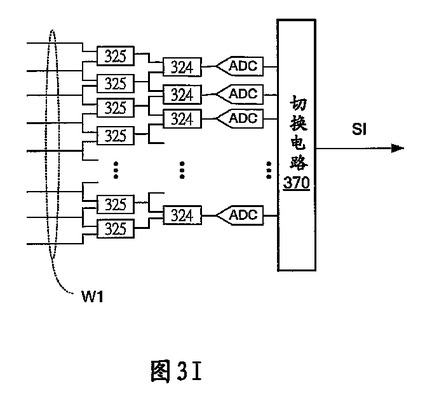
【図3J】
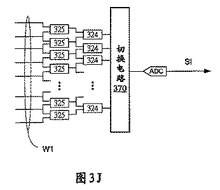
【図4A】
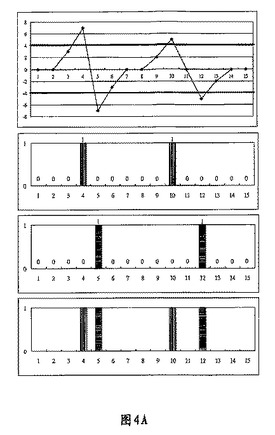
【図4B】
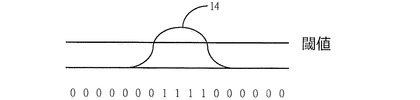
【図4C】
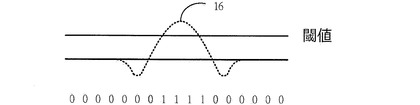
【図4D】
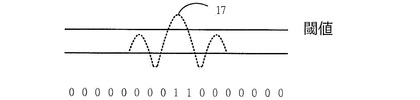
【図5】
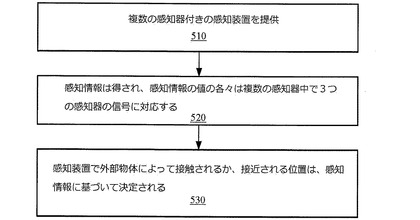
【図6】
【図7A】
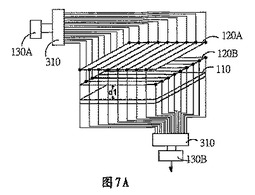
【図7B】
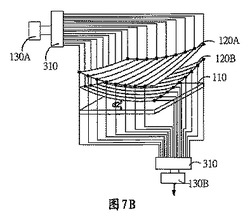
【図7C】
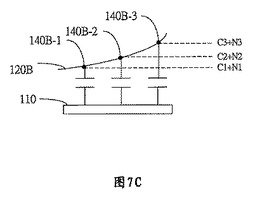
【図1B】
【図1C】
【図1D】
【図1E】
【図1F】
【図1G】
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図3G】
【図3H】
【図3I】
【図3J】
【図4A】
【図4B】
【図4C】
【図4D】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【公表番号】特表2013−507672(P2013−507672A)
【公表日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2012−532443(P2012−532443)
【出願日】平成22年10月8日(2010.10.8)
【国際出願番号】PCT/CN2010/001558
【国際公開番号】WO2011/041944
【国際公開日】平成23年4月14日(2011.4.14)
【出願人】(512092531)禾瑞亞科技股▲ふん▼有限公司 (1)
【氏名又は名称原語表記】EGALAX EMPIA TECHNOLOGY INC.
【住所又は居所原語表記】11F.,NO.302,RUEIGUANG RD.,NEIHU DISTRICT,TAIPEI CITY 114,TAIWAN
【Fターム(参考)】
【公表日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成22年10月8日(2010.10.8)
【国際出願番号】PCT/CN2010/001558
【国際公開番号】WO2011/041944
【国際公開日】平成23年4月14日(2011.4.14)
【出願人】(512092531)禾瑞亞科技股▲ふん▼有限公司 (1)
【氏名又は名称原語表記】EGALAX EMPIA TECHNOLOGY INC.
【住所又は居所原語表記】11F.,NO.302,RUEIGUANG RD.,NEIHU DISTRICT,TAIPEI CITY 114,TAIWAN
【Fターム(参考)】
[ Back to top ]