
データリードのためのヘッド位置決めにオフセットを用いる磁気ディスク装置及びヘッド位置決め方法
【課題】書き込み回数増加に起因する読み出しエラーレートの悪化またはリードリトライの発生回数の増加を防止する。
【解決手段】実施形態によれば、磁気ディスク装置は、書き込み回数記憶手段と、リードオフセット設定手段と、制御手段とを具備する。前記書き込み回数記憶手段は、ディスク上のトラック毎あるいはゾーン毎の書き込み回数を格納する。前記リードオフセット設定手段は、データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定する。前記制御手段は、前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける。
【解決手段】実施形態によれば、磁気ディスク装置は、書き込み回数記憶手段と、リードオフセット設定手段と、制御手段とを具備する。前記書き込み回数記憶手段は、ディスク上のトラック毎あるいはゾーン毎の書き込み回数を格納する。前記リードオフセット設定手段は、データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定する。前記制御手段は、前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、データリードのためのヘッド位置決めにオフセットを用いる磁気ディスク装置及びヘッド位置決め方法に関する。
【背景技術】
【0002】
近年、磁気ディスク装置の高容量化に伴い、高記録密度化、高トラック密度化が進んでいる。高トラック密度化により、ディスク(磁気ディスク)上で隣接するトラック間の間隔(つまりトラックピッチ)が狭小化されている。
【0003】
トラックピッチが狭小化されると、ヘッド(磁気ヘッド)により目標トラックにデータを磁気的に書き込む際に、当該目標トラックに隣接するトラックに既に磁気的に書き込まれているデータの磁気的劣化、つまり隣接トラックの磁化の減少を招く可能性がある。この要因は、ヘッドが発生する磁界のうちデータ書き込みに寄与しない成分、いわゆる漏洩磁界にある。
【0004】
隣接トラックへの漏洩磁界の影響は、目標トラックへのデータ書き込みの都度蓄積される。このため、目標トラックへのデータ書き込みの回数の増加に応じて、隣接トラックの磁化の減少が進む。このように、隣接トラックの磁化が減少(つまり減磁)する現象は、サイドイレーズ(隣接トラック消去)と呼ばれる。
【0005】
隣接トラックの減磁(サイドイレーズ)が進行すると、当該隣接トラックからデータを読み出す際のエラー率も増加する。やがて、誤り訂正符号(ECC)を最大限に用いて隣接トラックのデータの修復を試みても、当該データを修復することが困難となる。これにより、結果としてデータが消失する。
【0006】
そこで近年の磁気ディスク装置では、隣接トラックの減磁の進行により、当該隣接トラックからのデータの読み出しが不能になる前に、当該隣接トラックの磁化を回復させるためのトラックリフレッシュ(再書き込み)が必須になりつつある。つまり、ゾーン毎、あるいはトラック毎に書き込み回数が監視され、当該書き込み回数が閾値を超えた場合に、対応するゾーン内の各トラック、あるいは対応するトラック(より詳細には、書き込み回数が閾値を超えたトラックに隣接するトラック)のトラックリフレッシュが行われる。
【0007】
トラックリフレッシュは、減磁したトラックのデータを、当該トラックから読み出し、当該読み出されたデータを当該トラックに再度書き込む動作として知られている。このトラックへのデータの再書き込み(つまりトラックリフレッシュ)により、当該トラックの磁化は回復する。
【0008】
隣接トラックの減磁(サイドイレーズ)は、データが書き込まれるべき目標トラックにヘッドを位置付ける際の位置誤差によっても発生する。そこで近年は、ディスク上のセクタ毎にライトインヒビットスライスが設定される磁気ディスク装置も知られている。このような磁気ディスク装置では、目標トラック内の目標セクタにデータを書き込む際における、当該目標トラックの中心線からのヘッド位置のずれ量が当該目標セクタに対応するライトインヒビットスライスを超える場合、当該目標セクタへの書き込みが禁止される。これにより、ヘッド位置のずれに起因して目標トラックに隣接するトラックのデータが消去される(書き換えられる)のを防止できる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−303303号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記したように近年の磁気ディスク装置では、ゾーン毎、あるいはトラック毎の書き込み回数が閾値を超えた場合にトラックリフレッシュが行われる。これによりトラックのデータが減磁によって読み出し不能となるのを防止できる。但し、頻繁にトラックリフレッシュが行われると、磁気ディスク装置のパフォーマンスが低下する。そのため、上記書き込み回数の閾値は比較的高めに設定される傾向にある。
【0011】
一方、書き込み回数、例えば第1のトラックに隣接する第2のトラックの書き込み回数が閾値を超えない範囲内でも、当該書き込み回数が増加するに従って、第1のトラックの読み出しエラーレートは増加する傾向にある。この閾値が比較的高めに設定される場合、この傾向は強くなる。このように、トラックの読み出しエラーレートが増加すると、当該トラックのリードリトライの回数が増加する。すると、トラックからのデータの読み出しに長時間を要し、かえって磁気ディスク装置のパフォーマンスが低下するおそれがある。
【0012】
本発明の目的は、書き込み回数増加に起因する読み出しエラーレートの悪化またはリードリトライの発生回数の増加を防止できる、データリードのためのヘッド位置決めにオフセットを用いる磁気ディスク装置及びヘッド位置決め方法を提供することにある。
【課題を解決するための手段】
【0013】
実施形態によれば、磁気ディスク装置は、書き込み回数記憶手段と、リードオフセット設定手段と、制御手段とを具備する。前記書き込み回数記憶手段は、ディスク上のトラック毎あるいはゾーン毎の書き込み回数を格納する。前記リードオフセット設定手段は、データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定する。前記制御手段は、前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける。
【図面の簡単な説明】
【0014】
【図1】実施形態に係る磁気ディスク装置を備えた電子機器の典型的な構成を示すブロック図。
【図2】同実施形態で適用されるディスクのフォーマットの概要を示す概念図。
【図3】隣接トラックへのデータ書き込みの回数と最適リード位置との関係について説明するための模式図。
【図4】リードされるべき目標トラックに隣接するトラックにデータを書き込んだ場合の、書き込み回数毎のリード成否のプロファイルを、ディスクの外周部,中周部,内周部で測定した結果の例を示す図。
【図5】図4に示されるプロファイルに基づいて取得される、書き込み回数毎の最適リード位置をゾーン別にプロットし直した折れ線グラフを示す図。
【図6】同実施形態で適用されるコントローラの主要な構成を、当該コントローラと関係する周辺の構成と共に示すブロック図。
【図7】同実施形態で適用される書き込み回数メモリにおける書き込み回数の格納形式の一例を示す図。
【図8】同実施形態で適用されるイレーズ幅テーブルのデータ構造の一例を示す図。
【図9】同実施形態で適用されるイレーズ幅テーブルの示す、トラック毎の書き込み回数に対応するイレーズ幅の概念を説明するための図。
【図10】同実施形態においてリードコマンドに応じてヘッドを目標トラックに位置付ける場合の手順を示すフローチャート。
【図11】同実施形態の効果を説明するための図であり、ゾーン毎の内周側イレーズ幅及び外周側イレーズ幅を測定した結果と、当該測定結果に基づいて設定されたイレーズ幅テーブルに基づいて決定されるゾーン毎の最適リード位置を表す曲線とを示す図。
【発明を実施するための形態】
【0015】
以下、実施の形態につき図面を参照して説明する。
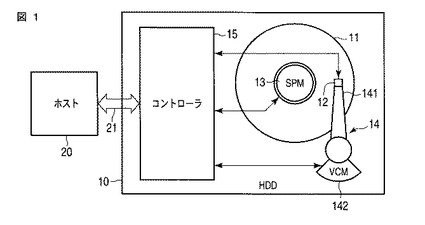
図1は1つの実施形態に係る磁気ディスク装置を備えた電子機器の典型的な構成を示すブロック図である。
【0016】
図1に示す電子機器は、磁気ディスク装置(以下、HDDと称する)10とホスト20とを備えている。電子機器は、例えば、パーソナルコンピュータである。ホスト20は、ホストインタフェース21を介してHDD10と接続されている。ホスト20は、HDD10を当該ホスト20の記憶装置として利用する。
【0017】
HDD10は、ディスク(磁気ディスク)11、ヘッド(磁気ヘッド)12、スピンドルモータ(以下、SPMと称する)13、アクチュエータ14及びコントローラ15を備えている。
ディスク11は上側と下側の2つのディスク面を有している。ディスク11の例えば上側のディスク面は、データが磁気記録される記録面をなしている。
【0018】
ヘッド12はディスク11の記録面に対応して配置される。ヘッド12は、図示せぬリード素子RE及び図3に示すライト素子WEを備えている。ヘッド12は、ディスク11に記録されたデータを再生し、且つディスク11にデータを記録する。つまりヘッド12は、ディスク11からデータを読み出し、且つディスク11にデータを書き込む。
【0019】
なお図1では、作図の都合上、ディスク11の上側のディスク面(記録面)に対応してヘッド12が配置されている。しかし、一般には、ディスク11の2つのディスク面が共に記録面をなしており、各々のディスク面に対応してヘッドが配置される。そこで、以下の説明では、ディスク11の各々のディスク面に対応してヘッド12が配置されているものとする。また図1の構成では、単一枚のディスク11を備えたHDD10を想定している。しかし、ディスク11が複数枚積層配置されたHDDであっても構わない。
【0020】
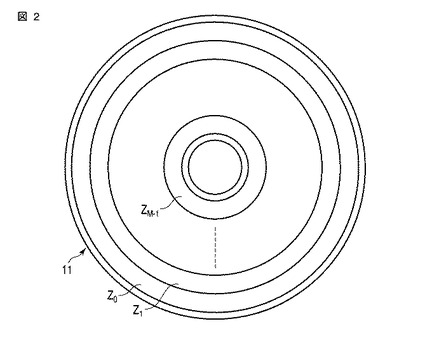
図2は、ディスク11のフォーマットの概要を示す概念図である。
ディスク11(より詳細にはディスク11の各記録面)は、当該ディスク11の半径方向にn個のゾーンZ0(#0)〜ZM-1(#M−1)に区分して管理される。つまり、ディスク11は、N個のゾーンZ0〜ZM-1を備えている。本実施形態において、Nは29である。ゾーンZ0〜ZM-1の各々は、複数のトラックを備えている。
【0021】
再び図1を参照すると、ディスク11はSPM13によって高速に回転させられる。ヘッド12は、アクチュエータ14のアーム141の先端に取り付けられている。ヘッド12は、ディスク11が高速に回転することにより当該ディスク11上で浮上する。アクチュエータ14は、当該アクチュエータ14の駆動源となるボイスコイルモータ(以下、VCMと称する)142を有している。ヘッド12は、アクチュエータ14がVCM142によって駆動されることにより、ディスク11上を当該ディスク11の半径方向に、円弧を描くように移動する。このため、アクチュエータ14のアームの中心線とトラック方向(ディスク11の円周方向)とのなす角は、ディスク11の内周部、中周部及び外周部で異なる。つまり、ヘッド12のライト素子WE(図3参照)とトラックとのなす角も、ディスク11の内周部、中周部及び外周部とで異なる。この角はスキュー(skew)角と呼ばれる。
【0022】
コントローラ15は、例えばマイクロプロセッサユニット(MPU)、メモリ等を含む複数の要素が単一チップに集積されたシステムLSIによって実現される。コントローラ15は、当該コントローラ15とホスト20との間で信号を授受する。具体的には、コントローラ15は、ホスト20からホストインタフェース21を介して転送されるコマンド(ライトコマンド、リードコマンド等)を受信する。コントローラ15はまた、ホスト20と当該コントローラ15との間のデータ転送を制御する。コントローラ15はまた、ヘッド12を介して行われるディスク11と当該コントローラ15との間のデータ転送を制御する。コントローラ15はまた、SPM13及びVCM142を制御する。特にコントローラ15は、ヘッド12を目標トラックに位置付けるために、VCM142を制御する。
【0023】
前述したように、第1のトラックに隣接する第2のトラックの書き込み回数が増加するに従って、第1のトラックの読み出しエラーレートは増加する傾向にある。この要因について、図2を参照して説明する。
【0024】
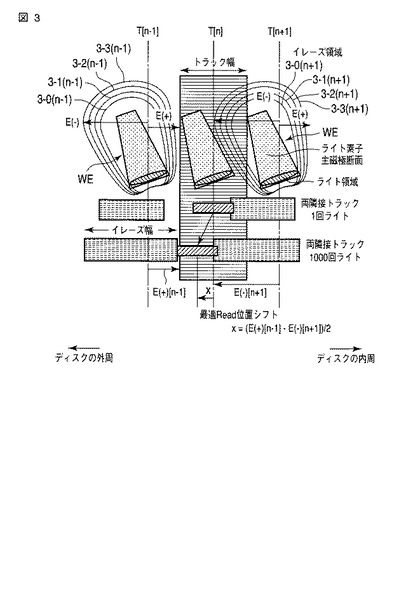
図3は、隣接トラックへのデータ書き込みの回数と最適リード位置との関係について説明するための模式図である。
図3には、トラック番号が連続する3つのトラックT[n−1],T[n],T[n+1]が示されている。トラックT[n−1],T[n],T[n+1]のトラック番号は、それぞれ「n−1」,「n」,「n+1」である。図3の例では、トラックT[n−1]がディスク11の外周に最も近く、トラックT[n+1]がディスク11の内周に最も近いものとする。
【0025】
図3において、トラックT[n]は、リードされるべき目標トラックであるものとする。また、トラックT[n]に隣接する2つのトラックT[n−1],T[n+1]に対するデータ書き込みが1000回実行されているものとする。図3にはまた、トラックT[n−1]へのデータの書き込みのために、当該トラックT[n−1]内の所定位置、例えば当該トラックT[n−1]の中心線にヘッド12のライト素子WEが位置付けられている状態と、トラックT[n+1]へのデータの書き込みのために、当該トラックT[n+1]の中心線にヘッド12のライト素子WEが位置付けられている状態とが、模式的に示されている。
【0026】
トラックT[n−1],T[n+1]の各々に対するデータ書き込みが行われた場合に、ライト素子WEの漏れ磁界に起因して減磁される領域(以下、イレーズ領域と称する)は、データ書き込みの回数が増加するに従って拡大する。図3には、トラックT[n−1]に対するデータ書き込みの回数がそれぞれ1,10,100,1000の場合のイレーズ領域3-0(n-1),3-1(n-1),3-2(n-1),3-3(n-1)と、トラックT[n+1]に対するデータ書き込みの回数がそれぞれ1,10,100,1000の場合のイレーズ領域3-0(n+1),3-1(n+1),3-2(n+1),3-3(n+1)とが示されている。
【0027】
さて、図3からも明らかなように、ライト素子WEは、トラックT[n−1],T[n+1]に対してスキュー角を有する。勿論、ライト素子WEは、トラックT[n]に対してもスキュー角を有する。
【0028】
ライト素子WEが、トラックT[n−1]に対してスキュー角を有する場合、イレーズ領域3-i(n-1)(i=0,1,2,3)は、当該トラックT[n−1]の中心線に対して、ディスク11の半径方向にアンバランスな幅(以下、イレーズ幅と称する)E(−),E(+)を有する。トラックT[n+1]に関しても同様である。つまり、ライト素子WEが、トラックT[n+1]に対してスキュー角を有する場合、イレーズ領域3-i(n+1)は、当該トラックT[n+1]の中心線に対してアンバランスなイレーズ幅E(−),E(+)を有する。イレーズ幅E(−)を外周側イレーズ幅と呼び、イレーズ幅E(+)を内周側イレーズ幅と呼ぶこともある。
【0029】
図3の例では、イレーズ領域3-i(n-1)及び3-i(n+1)のうちイレーズ領域3-i(n+1)の方がトラックT[n]に対する影響が大きい。この場合、トラックT[n]のトラック幅のうちトラックT[n+1]側の部分が広く減磁される。また前述したように、トラックT[n−1],T[n+1]へのデータ書き込みの回数(以下、隣接トラック書き込み回数と称することもある)が増加すると、イレーズ領域3-i(n-1),3-i(n+1)が広がる。
【0030】
したがって図3の例では、隣接トラック書き込み回数の増加に従い、トラックT[n]の減磁がトラックT[n+1]側から進行する。このような状況で、トラックT[n](つまり、リードされるべき目標トラックT[n])の中心線にヘッド12のリード素子REを位置付けたならば、当該トラックT[n]からデータを読み出す際のエラーレートは増加する
例えば、隣接トラック書き込み回数が1の場合、トラックT[n]からデータを読み出す際のエラーレートが最小となるリード位置の最適点(最適リード位置)は、図3から明らかなように、トラックT[n]のほぼ中心線である。これに対し、隣接トラック書き込み回数が例えば1000の場合、最適リード位置は、トラックT[n]の減磁のトラックT[n+1]側からの進行によって、トラックT[n]の中心線からトラックT[n−1]の方向にシフトする。
【0031】
この隣接トラック書き込み回数が1000の場合の最適リード位置は、トラックT[n−1]の内周側イレーズ幅をE(+)、トラックT[n+1]の外側イレーズ幅をE(−)とすると、図3に示されるように、トラックT[n]の中心線からx=((E(+)−E(−))/2だけずれた位置となる。
【0032】
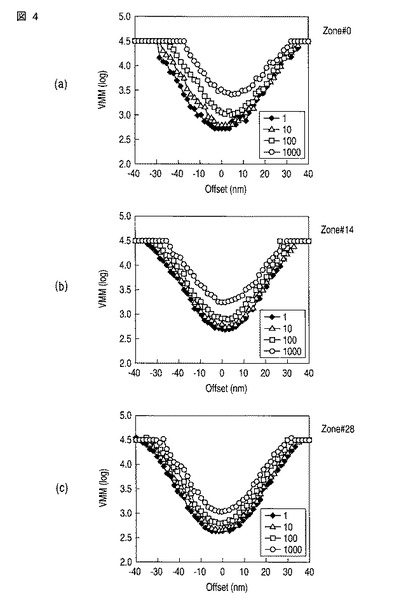
図4(a),(b),(c)は、それぞれ、リードされるべき目標トラックT[n]に隣接するトラックT[n−1]及びT[n+1]の双方にデータを1回、10回、100回及び1000回書き込んだ場合の、書き込み回数毎のリード成否のプロファイルを、ディスク11の外周部,中周部,内周部で測定した結果の例を示す。この測定は、ヘッド12のリード素子RE(の中央位置)を、目標トラックT[n]の中心線から、ディスク11の半径方向に、一定長ずつずらした位置(リード位置)に位置付けた状態で繰り返し行われている。ディスク11の外周部,中周部,内周部は、N=29の本実施形態では、それぞれ、ゾーンZ0(#0),Z14(#14),Z28(#28)である。
【0033】
図4(a),(b),(c)には、いずれも、隣接トラック書き込み回数が1,10,100及び1000の場合のリード成否のプロファイルが示されている。図4(a),(b),(c)の例では、リード成否の確率として、エラーレートと相関のよい、周知のビタビ・メトリクス(Viterbi-Metrics)マージン値(VMM)が用いられている。図4(a),(b),(c)の縦軸は、このVMM(より詳細にはVMMの対数値)を示し、横軸は、リード位置の目標トラックT[n]の中心線からのオフセット(単位はnm)を示す。
【0034】
図4(a),(b),(c)に示すリード成否のプロファイル(VMMプロファイル)からは、隣接トラック書き込み回数の増加に従ってVMMが悪化すると共に、VMMの最小値を得るためのリード位置の最適点(最適リード位置)が、目標トラックT[n]の中心線からずれていくことが分かる。つまり、最適リード位置の目標トラックT[n]の中心線からのオフセット値(以下、最適リードオフセット値と称することもある)がシフトしていくことが分かる。
【0035】
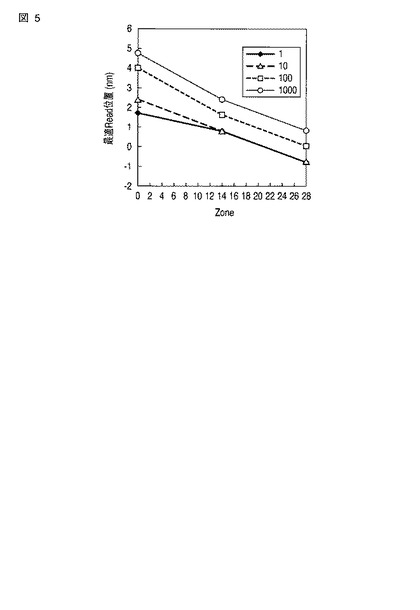
図5は、図4(a),(b),(c)に示すVMMプロファイルに基づいて取得される、隣接トラック書き込み回数が1,10,100,1000のそれぞれの場合の最適リード位置をゾーン毎にプロットし直した折れ線グラフを示す。図5から、例えば最外周ゾーンZ0(#0)において隣接トラック書き込み回数が1000回になると、最適リード位置は4.8nm程度となり、目標トラックT[n]の中心線から4.8nm程度のずれが発生していることが分かる。このずれ、つまりオフセット(リードオフセット)を考慮して、リード位置を最適リード位置に補正するには、当該リードオフセットを例えば一定値ずつ変えながらエラーレートあるいはVMMが最小となる最適点を探索する処理を実行すればよい。しかし、このような処理を実行した場合、HDD10のパフォーマンスを著しく阻害することになる。そこで本実施形態では、以下に述べるように、イレーズ幅テーブル152(図6参照)を利用して最適リード位置を設定するようにしている。
【0036】
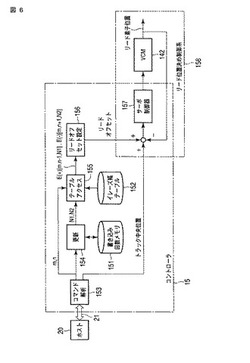
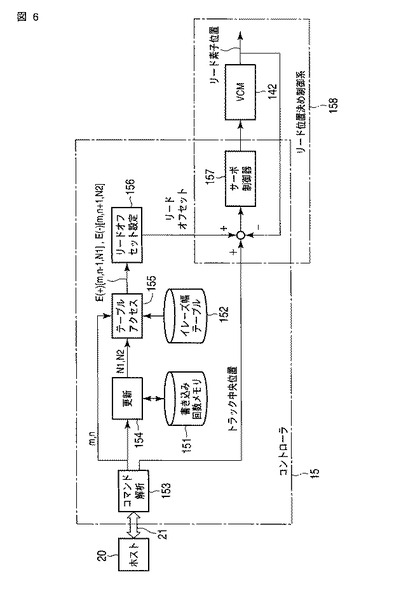
図6は、コントローラ15の主要な構成を、当該コントローラ15と関係する周辺の構成と共に示すブロック図である。
コントローラ15は、書き込み回数メモリ151、イレーズ幅テーブル152、コマンド解析モジュール153、更新モジュール154、テーブルアクセスモジュール155、リードオフセット設定モジュール156及びサーボ制御器157を備えている。
【0037】
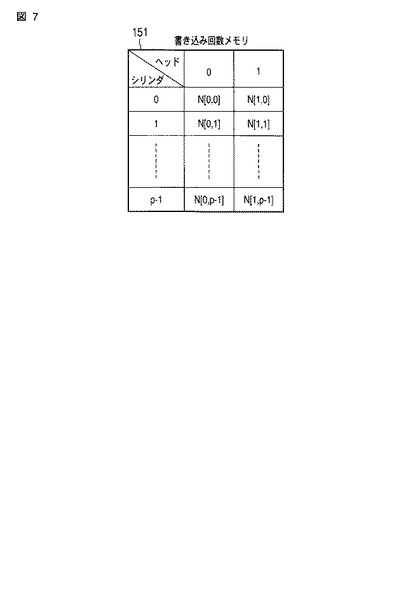
書き込み回数メモリ151は、例えば、ヘッド毎で且つシリンダ毎(つまりトラック毎)のデータの書き込み回数を格納する。書き込み回数メモリ151における書き込み回数の格納形式の一例を図7に示す。図7の例では、ヘッド番号m(m=0,1)、シリンダ番号n(n=0,1,…p−1)で指定されるトラックT[m,n]の書き込み回数は、N[m,n]で示される。
【0038】
イレーズ幅テーブル152は、ヘッド毎、シリンダ毎で且つ書き込み回数毎のイレーズ幅E(+),E(−)を予め登録する。つまりイレーズ幅テーブル152は、トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)を予め登録する。本実施形態において、書き込み回数の最大値qは、トラックリフレッシュを実行すべきか否かの判定に用いられる閾値より小さく、例えば「閾値−1」である。トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)は、後述するように、予め測定及び推定可能である。本実施形態では、この測定及び推定結果に基づいてイレーズ幅テーブル152が設定される。イレーズ幅テーブル152は、例えばフラッシュメモリのような不揮発性メモリに保存されている。
【0039】
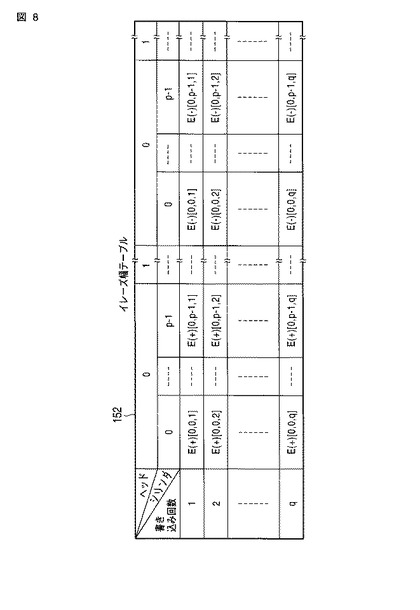
図8は、イレーズ幅テーブル152のデータ構造の一例を示す。図8の例では、ヘッド番号(m=0,1)、シリンダ番号n(n=0,1,…p−1)で指定されるトラックT[m,n]の書き込み回数N(N=N[m,n]=0,1,…q)に対応するイレーズ幅E(+)及びE(−)は、それぞれ、E(+)[m,n,N]及びE(−)[m,n,N]で示される。
【0040】
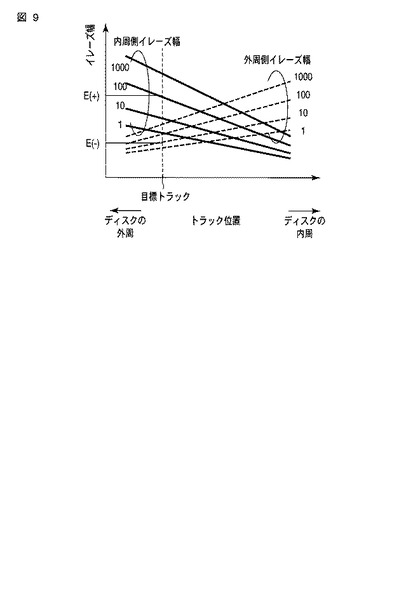
図9は、イレーズ幅テーブル152の示す、トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)の概念を説明するための図である。図9から明らかなように、イレーズ幅(内周側イレーズ幅)E(+)は外周側のトラックほど広くなり、イレーズ幅(外周側イレーズ幅)E(−)は内周側のトラックほど広くなる。
【0041】
再び図6を参照すると、コマンド解析モジュール153は、ホスト20から転送されたコマンドを解析し、当該コマンドの指定する動作を制御する。更新モジュール154は、解析されたコマンドに応じてディスク11上のトラックT[m,n]にデータが書き込まれる場合に、書き込み回数メモリ151に格納されている当該トラックT[m,n]の書き込み回数をインクリメントする。また更新モジュール154は、トラックT[m,n]の書き込み回数がトラックリフレッシュのための閾値を超えたために、当該トラックT[m,n]に隣接するトラックT[m,n−1],T[m,n+1]がリフレッシュされた場合、従来技術と同様に、書き込み回数メモリ151に格納されている、当該トラックT[m,n]の書き込み回数をゼロにリセットする。
【0042】
テーブルアクセスモジュール155は、解析されたコマンドがリードコマンドであり、当該リードコマンドの指定するトラック(つまり目標トラック)からデータを読み出すために、当該目標トラックにヘッド12を位置付ける場合に、イレーズ幅テーブル152にアクセスする。テーブルアクセスモジュール155はイレーズ幅テーブル152から、目標トラックにディスク11の外周側で隣接するトラックの書き込み回数(隣接トラック書き込み回数)に対応する内周側イレーズ幅E(+)及当該目標トラックにディスク11の内周側で隣接するトラックの書き込み回数に対応する外周側イレーズ幅E(−)を取得する。
【0043】
リードオフセット設定モジュール156は、取得された内周側イレーズ幅E(+)及び外周側イレーズ幅E(−)に基づいて、ヘッド12が位置付けられるべき目標トラック上の位置(リード位置)の当該目標トラックの中心線からのオフセット量を、リードオフセット値として設定する。
【0044】
サーボ制御器157は、ヘッド12を最適リード位置に位置付けるリード位置決め制御系158の主要素である。サーボ制御器157は、ヘッド12(より詳細には、ヘッド12のヘッド素子RE)の最適リード位置からのずれ(位置誤差)を圧縮するようにVCM142をフィードバック制御する。
【0045】
一般に、最適リード位置は目標トラックT[n]の中心線の位置である。しかし本実施形態では、テーブルアクセスモジュール155によって外周側隣接トラックT[n−1]の内周側イレーズ幅E(+)及び内周側隣接トラックT[n+1]の外周側イレーズ幅E(−)が取得された場合、図3を参照しての前述の説明からも明らかなように、最適リード位置は、目標トラックT[n]の中心線からx=(E(+)−E(−))/2だけずれた位置として決定される。(E(+)−E(−))/2は、ヘッド12のヘッド素子REを最適リード位置に位置付けるためのリードオフセット値であり、リードオフセット設定モジュール156によって算出される。。
【0046】
次に、本実施形態の動作について、ホスト20からHDD10に転送されたリードコマンドに応じて、ヘッド12を目標トラックに位置付ける場合を例に、図10のフローチャートを参照して説明する。
【0047】
まず、ホスト20からHDD10にコマンドが転送され、当該転送されたコマンドがHDD10のコントローラ15で受信されたものとする。この受信コマンドが、ヘッド番号m、シリンダ番号nで示されるトラックT[m,n](つまり目標トラックT[m,n])からのデータの読み出しを指定するリードコマンドであるものとする。また、ヘッド番号mで示されるヘッドがヘッド12であるものとする。
【0048】
コントローラ15のコマンド解析モジュール153は、受信されたリードコマンドを解析する(ステップ101)。このリードコマンドの解析結果に基づいて、コントローラ15内では、ヘッド12のリード素子REの中央位置を最適リード位置に位置付けるための制御が次のように行われる。以下の説明では、目標トラックT[m,n]にディスク11の外周側で隣接するトラックを、トラックT[m,n−1]または外周隣接トラックT[m,n−1]と表現する。また、目標トラックT[m,n]にディスク11の内周側で隣接するトラックを、トラックT[m,n+1]または内周隣接トラックT[m,n+1]と表現する。
【0049】
まず、コマンド解析モジュール153は、リードコマンドの解析の結果に基づいて、リードされるべき目標トラックT[m,n]のヘッド番号m及びシリンダ番号nをテーブルアクセスモジュール155に通知する(ステップ102)。
【0050】
するとコントローラ15のテーブルアクセスモジュール155は、書き込み回数メモリ151を参照することにより、トラックT[m,n−1]及びT[m,n+1]それぞれの書き込み回数N1及びN2を取得する(ステップ103)。つまりテーブルアクセスモジュール155は、ヘッド番号m及びシリンダ番号n−1に対応付けて、書き込み回数メモリ151に格納されている、トラックT[m,n−1]にデータが書き込まれた回数N[m,n−1]を、当該トラックT[m,n−1]の書き込み回数N1として取得する。またテーブルアクセスモジュール155は、ヘッド番号m及びシリンダ番号n+1に対応付けて、書き込み回数メモリ151に格納されている、トラックT[m,n+1]にデータが書き込まれた回数N[m,n+1]を、当該トラックT[m,n+1]の書き込み回数N2として取得する。
【0051】
次にテーブルアクセスモジュール155はイレーズ幅テーブル152にアクセスすることにより、イレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]を取得する(ステップ104)。つまりテーブルアクセスモジュール155は、トラックT[m,n−1]及び書き込み回数N1に対応付けてイレーズ幅テーブル152に格納されている2つのイレーズ幅のうちの内周側イレーズ幅E(+)を、イレーズ幅E(+)[m,n−1,N1]として取得する。またテーブルアクセスモジュール155は、トラックT[m,n+1]及び書き込み回数N2に対応付けてイレーズ幅テーブル152に格納されている2つのイレーズ幅のうちの外周側イレーズ幅E(−)を、イレーズ幅E(−)[m,n+1,N2]として取得する。
【0052】
このように本実施形態では、イレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]をイレーズ幅テーブル152から直接取得することができる。その理由は、イレーズ幅テーブル152に、ディスク11上の全てのトラック及び書き込み回数の最大値qまでの全ての書き込み回数に対応するイレーズ幅E(+)及びE(−)が登録されているためである。
【0053】
しかしイレーズ幅テーブル152に、予め定められたトラックの予め定められた書き込み回数に対応するイレーズ幅E(+)及びE(−)のみが登録される構成であっても構わない。例えばイレーズ幅テーブル152に、ゾーンZ0〜Z28(M=29)内の相対位置が同一のトラック(以下、代表トラックと称する)の書き込み回数1,10,100及び1000のそれぞれに対応するイレーズ幅E(+)及びE(−)のみが登録される構成であっても構わない。このような構成において、トラックT[m,n−1]及び書き込み回数N1に対応するイレーズ幅(つまり取得されるべきイレーズ幅)、あるいはトラックT[m,n+1]及び書き込み回数N2に対応するイレーズ幅(つまり取得されるべきイレーズ幅)がイレーズ幅テーブル152に登録されていないものとする。この場合、取得されるべきイレーズ幅を、当該イレーズ幅テーブル152に基づいて周知の補間法(例えば線形補間法)で補間により決定すればよい。
【0054】
また、例えば、トラックT[m,n−1]及び書き込み回数N1にそれぞれ最も近いトラック及び書き込み回数に対応付けてイレーズ幅テーブル152に登録されている内周側イレーズ幅E(+)を、イレーズ幅E(+)[m,n−1,N1]として用いてもよい。同様に、トラックT[m,n+1]及び書き込み回数N2にそれぞれ最も近いトラック及び書き込み回数に対応付けてイレーズ幅テーブル152に登録されている外周側イレーズ幅E(−)を、イレーズ幅E(−)[m,n+1,N2]として用いてもよい。
【0055】
リードオフセット設定モジュール156は、テーブルアクセスモジュール155によって取得されたイレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]に基づいて、目標トラックT[m,n]の最適リード位置にヘッド12のリード素子REを位置付ける際のリードオフセット値(最適リードオフセット値)x[m,n]を算出する(ステップ105)。より具体的には、リードオフセット設定モジュール156は、リードオフセット値x[m,n]を、次式
x[m,n]
=(E(+)[m,n−1,N1]−E(−)[m,n+1,N2])/2
に従って算出する。
【0056】
このことから明らかなように、イレーズ幅テーブル152に登録されている、トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)は、リードオフセット値を決定するためのリードオフセットパラメータ値であるといえる。リードオフセット設定モジュール156は、算出されたリードオフセット値x[m,n]を、リード位置決め制御系158に設定する(ステップ106)。
【0057】
リード位置決め制御系158では、設定されたリードオフセット値x[m,n]が目標トラックT[m,n]の中央線の位置(通常の目標位置)に加算され、加算結果の示す位置が、新たな目標位置、つまり最適リード位置として決定される。リード位置決め制御系158のサーボ制御器157は、この新たな目標位置にヘッド12のリード素子REが位置付けられるように、VCM142を制御する。つまりサーボ制御器157は、目標トラックT[m,n]の中央線の位置からリードオフセット値x[m,n]だけずれた最適リード位置にヘッド12のリード素子REを位置付けるための位置決め制御を実行する(ステップ107)。ここで、目標トラックT[m,n]の中央線の位置を0とするならば、最適リード位置はリードオフセット値x[m,n]に一致する。
【0058】
このように本実施形態によれば、目標トラックT[m,n]の外周側隣接トラックT[m,n−1]の書き込み回数N1に対応する内周側イレーズ幅E(+)[m,n−1,N1]と、目標トラックT[m,n]の内周側隣接トラックT[m,n+1]の書き込み回数N2に対応する外周側イレーズ幅E(−)[m,n+1,N2]とに基づいて、リード位置が補正される。つまり、エラーレートが最小となる最適リード位置とのずれが補正され、ヘッド12のリード素子が当該最適リード位置に位置付けられる。これにより、目標トラックに隣接するトラックへのデータ書き込みの回数の増加に伴う当該隣接トラックのイレーズ領域(イレーズ幅)の広がりに起因して、目標トラックからデータを読み出す場合のエラーレートが高くなるのを防止できる。
【0059】
この本実施形態の効果について、図11を参照して説明する。
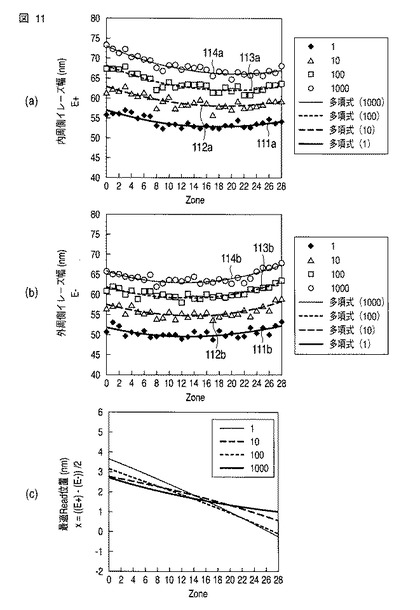
図11(a)は、ヘッド12に対応するディスク11の記録面上のゾーン毎の内周側イレーズ幅を測定した結果を、隣接トラック書き込み回数が1,10,100,1000のそれぞれについて示す。図11(b)は、ヘッド12に対応するディスク11の記録面上のゾーン毎の外周側イレーズ幅を測定した結果を、隣接トラック書き込み回数が1,10,100,1000のそれぞれについて示す。ここでは、ゾーンZ0〜Z28(M=29)内のそれぞれの代表トラックの内周側イレーズ幅及び外周側イレーズ幅が、当該ゾーンZ0〜Z28の内周側イレーズ幅及び外周側イレーズ幅として測定される。
【0060】
また、図11(a)は、隣接トラック書き込み回数が1,10,100,1000のそれぞれについてのゾーン毎の内周側イレーズ幅の測定結果を、それぞれ多項式(例えば2次多項式)で近似した曲線111a,112a,113a,114aも示す。一方、図11(b)は、隣接トラック書き込み回数が1,10,100,1000のそれぞれについてのゾーン毎の外周側イレーズ幅測定結果を、それぞれ多項式(例えば2次多項式)で近似した曲線111b,112b,113b,114bも示す。
【0061】
曲線111a,112a,113a,114a,111b,112b,113b,114bは、所定の多項式で近似される。これらの曲線の違いは、多項式の係数(多項式係数)の違いである。図8に示すデータ構造のイレーズ幅テーブル152は、図11(a)及び(b)の測定結果(より詳細には、測定結果から取得された曲線)に基づいて設定されたものである。つまり、各ゾーンの代表トラック以外のトラック群の、隣接トラック書き込み回数1,10,100,1000に対応する内周側イレーズ幅及び外周側イレーズ幅は、上述の曲線から決定(推定)される。また、各トラックの隣接トラック書き込み回数1,10,100,1000以外の書き込み回数に対応する内周側イレーズ幅及び外周側イレーズ幅も、上述の曲線から例えば補間により決定される。
【0062】
曲線111a,112a,113a,114a,111b,112b,113b,11は、多項式と、対応する多項式係数とに基づいて特定できる。よって、曲線111a,112a,113a,114a,111b,112b,113b,114bにそれぞれ対応する多項式係数を不揮発性メモリに予め格納しておき、イレーズ幅テーブル152に代えて、適宜対応する多項式係数を用いるようにしても構わない。つまり、多項式と目的とする隣接トラック書き込み回数に対応する多項式係数とに基づいて、目標トラックの外周側隣接トラック及び内周側隣接トラックの、それぞれ内周側イレーズ幅及び外周側イレーズ幅を計算するようにしてもよい。
【0063】
曲線111a,112a,113a,114a,111b,112b,113b,114b(にそれぞれ対応する多項式)は、トラック毎あるいはゾーン毎の書き込み回数に依存する。したがってリードオフセット設定モジュール156は、トラック毎あるいはゾーン毎の書き込み回数に基づいてリードオフセット値xを設定することが可能である。
【0064】
図11(c)は、図5との比較のために、上述のようにして設定されたイレーズ幅テーブル152に基づいて決定される、隣接トラック書き込み回数が1,10,100,1000のそれぞれについてのゾーン毎の最適リード位置(=リードオフセット値)xを表す曲線の例を示す。ここで、例えばディスク11の外周部に位置するゾーンZ0(#0)内の目標トラックT[n]からデータを読み出すものとする。このとき、隣接トラックT[n−1]及びT[n+1]へのデータの書き込み回数が1000であるものとすると、図11(c)に示す最適リード位置はほぼ4nmである。この値は、図4(a)のVMMが最小となる最適点(リード位置)の、目標トラックT[n]の中心線からのずれ(4.8nm程度)を十分補償可能である。
【0065】
つまり本実施形態によれば、目標トラックが属するゾーンに対応する最適リード位置(リードオフセット値)xに基づいて、ヘッド12のリード素子REの位置決めを制御することにより、当該目標トラックからデータを読み出す際のエラーレートを低減することができる。また、仮にリードエラーが発生しても、リード位置を例えば一定オフセット量ずつずらしながらリード位置の最適点を検索するための動作(つまりオフセット検索)を繰り返すリードリトライにおける、当該繰り返しの回数を減らすことができる。その理由は、オフセット探索の開始位置が最適点に近くなるためである。これによりHDD10のパフォーマンスを向上させることができる。
【0066】
[第1の変形例]
次に上記実施形態の第1の変形例について、図6を援用して説明する。
上記実施形態では、書き込み回数メモリ151は、トラック毎(ヘッド毎で且つシリンダ毎)の書き込み回数を格納する。これに対して第1の変形例では、書き込み回数メモリ151は、ゾーン毎(より詳細には、ヘッド毎で且つゾーン毎)の書き込み回数を格納する。ゾーン毎の書き込み回数は、対応するゾーンに属する全てのトラックの書き込み回数の総和である。一方、イレーズ幅テーブル152は、ゾーン毎(ヘッド毎、ゾーン毎)で且つ書き込み回数毎のイレーズ幅E(+),E(−)を予め登録する。
【0067】
この場合、テーブルアクセスモジュール155は、目標トラックにディスク11の外周側で隣接する外周隣接トラックが属するゾーンの書き込み回数及び当該目標トラックにディスク11の内周側で隣接する内周隣接トラックが属するゾーンの書き込み回数を書き込み回数メモリ151から取得する。またテーブルアクセスモジュール155は、取得された外周隣接トラックが属するゾーンの書き込み回数及び内周隣接トラックが属するゾーンの書き込み回数にそれぞれ対応するイレーズ幅E(+)及びE(−)をイレーズ幅テーブル152から取得する。第1の変形例は、各ゾーンにおいて、当該ゾーン内のそれぞれのトラックへのデータ書き込みが一様に行われる場合に適している。第1の変形例によれば、書き込み回数メモリ151及びイレーズ幅テーブル152に必要な記憶容量を低減できる。
【0068】
[第2の変形例]
次に上記実施形態の第2の変形例について、図6を援用して説明する。
第2の変形例において、書き込み回数メモリ151は、トラック毎(ヘッド毎、シリンダ毎)で且つセクタ毎の書き込み回数を格納する。この場合、目標トラックがトラックT[m,n]であるものとすると、テーブルアクセスモジュール155は、当該トラックT[m,n]内の目標セクタ(データが読み出されるべきセクタ)に隣接する、トラックT[m,n−1]内の第1のセクタ及びトラックT[m,n+1]内の第2のセクタのそれぞれの書き込み回数N1及びN2を書き込み回数メモリ151から取得する。
【0069】
次にテーブルアクセスモジュール155は、取得されたトラックT[m,n−1]内の第1のセクタの書き込み回数N1及びトラックT[m,n+1]内の第2のセクタの書き込み回数N2を、トラックT[m,n−1]の書き込み回数N1及びトラックT[m,n+1]の書き込み回数N2として用いる。これによりテーブルアクセスモジュール155は、上記実施形態と同様に、イレーズ幅テーブル152からイレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]を取得する。以降の動作は上記実施形態と同様であり、目標トラックT[m,n]内の目標セクタからデータを読み出す場合のエラーレートを効率的に低減できる。第2の変形例は、トラック内のそれぞれのセクタの間で、書き込み回数が著しく異なる場合に適している。
【0070】
以上説明した少なくとも1つの実施形態によれば、書き込み回数増加に起因する読み出しエラーレートの悪化またはリードリトライの発生回数の増加を防止できる、データリードのためのヘッド位置決めにオフセットを用いる磁気ディスク装置及びヘッド位置決め方法を提供することができる。
【0071】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0072】
10…HDD(磁気ディスク装置)、11…ディスク、12…ヘッド、14…アクチュエータ、15…コントローラ、20…ホスト、142…VCM(ボイスコイルモータ)、151…書き込み回数メモリ、152…イレーズ幅テーブル、153…コマンド解析モジュール、154…更新モジュール、155…テーブルアクセスモジュール、156…リードオフセット設定モジュール、157…サーボ制御器、158…リード位置決め制御系。
【技術分野】
【0001】
本発明の実施形態は、データリードのためのヘッド位置決めにオフセットを用いる磁気ディスク装置及びヘッド位置決め方法に関する。
【背景技術】
【0002】
近年、磁気ディスク装置の高容量化に伴い、高記録密度化、高トラック密度化が進んでいる。高トラック密度化により、ディスク(磁気ディスク)上で隣接するトラック間の間隔(つまりトラックピッチ)が狭小化されている。
【0003】
トラックピッチが狭小化されると、ヘッド(磁気ヘッド)により目標トラックにデータを磁気的に書き込む際に、当該目標トラックに隣接するトラックに既に磁気的に書き込まれているデータの磁気的劣化、つまり隣接トラックの磁化の減少を招く可能性がある。この要因は、ヘッドが発生する磁界のうちデータ書き込みに寄与しない成分、いわゆる漏洩磁界にある。
【0004】
隣接トラックへの漏洩磁界の影響は、目標トラックへのデータ書き込みの都度蓄積される。このため、目標トラックへのデータ書き込みの回数の増加に応じて、隣接トラックの磁化の減少が進む。このように、隣接トラックの磁化が減少(つまり減磁)する現象は、サイドイレーズ(隣接トラック消去)と呼ばれる。
【0005】
隣接トラックの減磁(サイドイレーズ)が進行すると、当該隣接トラックからデータを読み出す際のエラー率も増加する。やがて、誤り訂正符号(ECC)を最大限に用いて隣接トラックのデータの修復を試みても、当該データを修復することが困難となる。これにより、結果としてデータが消失する。
【0006】
そこで近年の磁気ディスク装置では、隣接トラックの減磁の進行により、当該隣接トラックからのデータの読み出しが不能になる前に、当該隣接トラックの磁化を回復させるためのトラックリフレッシュ(再書き込み)が必須になりつつある。つまり、ゾーン毎、あるいはトラック毎に書き込み回数が監視され、当該書き込み回数が閾値を超えた場合に、対応するゾーン内の各トラック、あるいは対応するトラック(より詳細には、書き込み回数が閾値を超えたトラックに隣接するトラック)のトラックリフレッシュが行われる。
【0007】
トラックリフレッシュは、減磁したトラックのデータを、当該トラックから読み出し、当該読み出されたデータを当該トラックに再度書き込む動作として知られている。このトラックへのデータの再書き込み(つまりトラックリフレッシュ)により、当該トラックの磁化は回復する。
【0008】
隣接トラックの減磁(サイドイレーズ)は、データが書き込まれるべき目標トラックにヘッドを位置付ける際の位置誤差によっても発生する。そこで近年は、ディスク上のセクタ毎にライトインヒビットスライスが設定される磁気ディスク装置も知られている。このような磁気ディスク装置では、目標トラック内の目標セクタにデータを書き込む際における、当該目標トラックの中心線からのヘッド位置のずれ量が当該目標セクタに対応するライトインヒビットスライスを超える場合、当該目標セクタへの書き込みが禁止される。これにより、ヘッド位置のずれに起因して目標トラックに隣接するトラックのデータが消去される(書き換えられる)のを防止できる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−303303号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記したように近年の磁気ディスク装置では、ゾーン毎、あるいはトラック毎の書き込み回数が閾値を超えた場合にトラックリフレッシュが行われる。これによりトラックのデータが減磁によって読み出し不能となるのを防止できる。但し、頻繁にトラックリフレッシュが行われると、磁気ディスク装置のパフォーマンスが低下する。そのため、上記書き込み回数の閾値は比較的高めに設定される傾向にある。
【0011】
一方、書き込み回数、例えば第1のトラックに隣接する第2のトラックの書き込み回数が閾値を超えない範囲内でも、当該書き込み回数が増加するに従って、第1のトラックの読み出しエラーレートは増加する傾向にある。この閾値が比較的高めに設定される場合、この傾向は強くなる。このように、トラックの読み出しエラーレートが増加すると、当該トラックのリードリトライの回数が増加する。すると、トラックからのデータの読み出しに長時間を要し、かえって磁気ディスク装置のパフォーマンスが低下するおそれがある。
【0012】
本発明の目的は、書き込み回数増加に起因する読み出しエラーレートの悪化またはリードリトライの発生回数の増加を防止できる、データリードのためのヘッド位置決めにオフセットを用いる磁気ディスク装置及びヘッド位置決め方法を提供することにある。
【課題を解決するための手段】
【0013】
実施形態によれば、磁気ディスク装置は、書き込み回数記憶手段と、リードオフセット設定手段と、制御手段とを具備する。前記書き込み回数記憶手段は、ディスク上のトラック毎あるいはゾーン毎の書き込み回数を格納する。前記リードオフセット設定手段は、データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定する。前記制御手段は、前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける。
【図面の簡単な説明】
【0014】
【図1】実施形態に係る磁気ディスク装置を備えた電子機器の典型的な構成を示すブロック図。
【図2】同実施形態で適用されるディスクのフォーマットの概要を示す概念図。
【図3】隣接トラックへのデータ書き込みの回数と最適リード位置との関係について説明するための模式図。
【図4】リードされるべき目標トラックに隣接するトラックにデータを書き込んだ場合の、書き込み回数毎のリード成否のプロファイルを、ディスクの外周部,中周部,内周部で測定した結果の例を示す図。
【図5】図4に示されるプロファイルに基づいて取得される、書き込み回数毎の最適リード位置をゾーン別にプロットし直した折れ線グラフを示す図。
【図6】同実施形態で適用されるコントローラの主要な構成を、当該コントローラと関係する周辺の構成と共に示すブロック図。
【図7】同実施形態で適用される書き込み回数メモリにおける書き込み回数の格納形式の一例を示す図。
【図8】同実施形態で適用されるイレーズ幅テーブルのデータ構造の一例を示す図。
【図9】同実施形態で適用されるイレーズ幅テーブルの示す、トラック毎の書き込み回数に対応するイレーズ幅の概念を説明するための図。
【図10】同実施形態においてリードコマンドに応じてヘッドを目標トラックに位置付ける場合の手順を示すフローチャート。
【図11】同実施形態の効果を説明するための図であり、ゾーン毎の内周側イレーズ幅及び外周側イレーズ幅を測定した結果と、当該測定結果に基づいて設定されたイレーズ幅テーブルに基づいて決定されるゾーン毎の最適リード位置を表す曲線とを示す図。
【発明を実施するための形態】
【0015】
以下、実施の形態につき図面を参照して説明する。
図1は1つの実施形態に係る磁気ディスク装置を備えた電子機器の典型的な構成を示すブロック図である。
【0016】
図1に示す電子機器は、磁気ディスク装置(以下、HDDと称する)10とホスト20とを備えている。電子機器は、例えば、パーソナルコンピュータである。ホスト20は、ホストインタフェース21を介してHDD10と接続されている。ホスト20は、HDD10を当該ホスト20の記憶装置として利用する。
【0017】
HDD10は、ディスク(磁気ディスク)11、ヘッド(磁気ヘッド)12、スピンドルモータ(以下、SPMと称する)13、アクチュエータ14及びコントローラ15を備えている。
ディスク11は上側と下側の2つのディスク面を有している。ディスク11の例えば上側のディスク面は、データが磁気記録される記録面をなしている。
【0018】
ヘッド12はディスク11の記録面に対応して配置される。ヘッド12は、図示せぬリード素子RE及び図3に示すライト素子WEを備えている。ヘッド12は、ディスク11に記録されたデータを再生し、且つディスク11にデータを記録する。つまりヘッド12は、ディスク11からデータを読み出し、且つディスク11にデータを書き込む。
【0019】
なお図1では、作図の都合上、ディスク11の上側のディスク面(記録面)に対応してヘッド12が配置されている。しかし、一般には、ディスク11の2つのディスク面が共に記録面をなしており、各々のディスク面に対応してヘッドが配置される。そこで、以下の説明では、ディスク11の各々のディスク面に対応してヘッド12が配置されているものとする。また図1の構成では、単一枚のディスク11を備えたHDD10を想定している。しかし、ディスク11が複数枚積層配置されたHDDであっても構わない。
【0020】
図2は、ディスク11のフォーマットの概要を示す概念図である。
ディスク11(より詳細にはディスク11の各記録面)は、当該ディスク11の半径方向にn個のゾーンZ0(#0)〜ZM-1(#M−1)に区分して管理される。つまり、ディスク11は、N個のゾーンZ0〜ZM-1を備えている。本実施形態において、Nは29である。ゾーンZ0〜ZM-1の各々は、複数のトラックを備えている。
【0021】
再び図1を参照すると、ディスク11はSPM13によって高速に回転させられる。ヘッド12は、アクチュエータ14のアーム141の先端に取り付けられている。ヘッド12は、ディスク11が高速に回転することにより当該ディスク11上で浮上する。アクチュエータ14は、当該アクチュエータ14の駆動源となるボイスコイルモータ(以下、VCMと称する)142を有している。ヘッド12は、アクチュエータ14がVCM142によって駆動されることにより、ディスク11上を当該ディスク11の半径方向に、円弧を描くように移動する。このため、アクチュエータ14のアームの中心線とトラック方向(ディスク11の円周方向)とのなす角は、ディスク11の内周部、中周部及び外周部で異なる。つまり、ヘッド12のライト素子WE(図3参照)とトラックとのなす角も、ディスク11の内周部、中周部及び外周部とで異なる。この角はスキュー(skew)角と呼ばれる。
【0022】
コントローラ15は、例えばマイクロプロセッサユニット(MPU)、メモリ等を含む複数の要素が単一チップに集積されたシステムLSIによって実現される。コントローラ15は、当該コントローラ15とホスト20との間で信号を授受する。具体的には、コントローラ15は、ホスト20からホストインタフェース21を介して転送されるコマンド(ライトコマンド、リードコマンド等)を受信する。コントローラ15はまた、ホスト20と当該コントローラ15との間のデータ転送を制御する。コントローラ15はまた、ヘッド12を介して行われるディスク11と当該コントローラ15との間のデータ転送を制御する。コントローラ15はまた、SPM13及びVCM142を制御する。特にコントローラ15は、ヘッド12を目標トラックに位置付けるために、VCM142を制御する。
【0023】
前述したように、第1のトラックに隣接する第2のトラックの書き込み回数が増加するに従って、第1のトラックの読み出しエラーレートは増加する傾向にある。この要因について、図2を参照して説明する。
【0024】
図3は、隣接トラックへのデータ書き込みの回数と最適リード位置との関係について説明するための模式図である。
図3には、トラック番号が連続する3つのトラックT[n−1],T[n],T[n+1]が示されている。トラックT[n−1],T[n],T[n+1]のトラック番号は、それぞれ「n−1」,「n」,「n+1」である。図3の例では、トラックT[n−1]がディスク11の外周に最も近く、トラックT[n+1]がディスク11の内周に最も近いものとする。
【0025】
図3において、トラックT[n]は、リードされるべき目標トラックであるものとする。また、トラックT[n]に隣接する2つのトラックT[n−1],T[n+1]に対するデータ書き込みが1000回実行されているものとする。図3にはまた、トラックT[n−1]へのデータの書き込みのために、当該トラックT[n−1]内の所定位置、例えば当該トラックT[n−1]の中心線にヘッド12のライト素子WEが位置付けられている状態と、トラックT[n+1]へのデータの書き込みのために、当該トラックT[n+1]の中心線にヘッド12のライト素子WEが位置付けられている状態とが、模式的に示されている。
【0026】
トラックT[n−1],T[n+1]の各々に対するデータ書き込みが行われた場合に、ライト素子WEの漏れ磁界に起因して減磁される領域(以下、イレーズ領域と称する)は、データ書き込みの回数が増加するに従って拡大する。図3には、トラックT[n−1]に対するデータ書き込みの回数がそれぞれ1,10,100,1000の場合のイレーズ領域3-0(n-1),3-1(n-1),3-2(n-1),3-3(n-1)と、トラックT[n+1]に対するデータ書き込みの回数がそれぞれ1,10,100,1000の場合のイレーズ領域3-0(n+1),3-1(n+1),3-2(n+1),3-3(n+1)とが示されている。
【0027】
さて、図3からも明らかなように、ライト素子WEは、トラックT[n−1],T[n+1]に対してスキュー角を有する。勿論、ライト素子WEは、トラックT[n]に対してもスキュー角を有する。
【0028】
ライト素子WEが、トラックT[n−1]に対してスキュー角を有する場合、イレーズ領域3-i(n-1)(i=0,1,2,3)は、当該トラックT[n−1]の中心線に対して、ディスク11の半径方向にアンバランスな幅(以下、イレーズ幅と称する)E(−),E(+)を有する。トラックT[n+1]に関しても同様である。つまり、ライト素子WEが、トラックT[n+1]に対してスキュー角を有する場合、イレーズ領域3-i(n+1)は、当該トラックT[n+1]の中心線に対してアンバランスなイレーズ幅E(−),E(+)を有する。イレーズ幅E(−)を外周側イレーズ幅と呼び、イレーズ幅E(+)を内周側イレーズ幅と呼ぶこともある。
【0029】
図3の例では、イレーズ領域3-i(n-1)及び3-i(n+1)のうちイレーズ領域3-i(n+1)の方がトラックT[n]に対する影響が大きい。この場合、トラックT[n]のトラック幅のうちトラックT[n+1]側の部分が広く減磁される。また前述したように、トラックT[n−1],T[n+1]へのデータ書き込みの回数(以下、隣接トラック書き込み回数と称することもある)が増加すると、イレーズ領域3-i(n-1),3-i(n+1)が広がる。
【0030】
したがって図3の例では、隣接トラック書き込み回数の増加に従い、トラックT[n]の減磁がトラックT[n+1]側から進行する。このような状況で、トラックT[n](つまり、リードされるべき目標トラックT[n])の中心線にヘッド12のリード素子REを位置付けたならば、当該トラックT[n]からデータを読み出す際のエラーレートは増加する
例えば、隣接トラック書き込み回数が1の場合、トラックT[n]からデータを読み出す際のエラーレートが最小となるリード位置の最適点(最適リード位置)は、図3から明らかなように、トラックT[n]のほぼ中心線である。これに対し、隣接トラック書き込み回数が例えば1000の場合、最適リード位置は、トラックT[n]の減磁のトラックT[n+1]側からの進行によって、トラックT[n]の中心線からトラックT[n−1]の方向にシフトする。
【0031】
この隣接トラック書き込み回数が1000の場合の最適リード位置は、トラックT[n−1]の内周側イレーズ幅をE(+)、トラックT[n+1]の外側イレーズ幅をE(−)とすると、図3に示されるように、トラックT[n]の中心線からx=((E(+)−E(−))/2だけずれた位置となる。
【0032】
図4(a),(b),(c)は、それぞれ、リードされるべき目標トラックT[n]に隣接するトラックT[n−1]及びT[n+1]の双方にデータを1回、10回、100回及び1000回書き込んだ場合の、書き込み回数毎のリード成否のプロファイルを、ディスク11の外周部,中周部,内周部で測定した結果の例を示す。この測定は、ヘッド12のリード素子RE(の中央位置)を、目標トラックT[n]の中心線から、ディスク11の半径方向に、一定長ずつずらした位置(リード位置)に位置付けた状態で繰り返し行われている。ディスク11の外周部,中周部,内周部は、N=29の本実施形態では、それぞれ、ゾーンZ0(#0),Z14(#14),Z28(#28)である。
【0033】
図4(a),(b),(c)には、いずれも、隣接トラック書き込み回数が1,10,100及び1000の場合のリード成否のプロファイルが示されている。図4(a),(b),(c)の例では、リード成否の確率として、エラーレートと相関のよい、周知のビタビ・メトリクス(Viterbi-Metrics)マージン値(VMM)が用いられている。図4(a),(b),(c)の縦軸は、このVMM(より詳細にはVMMの対数値)を示し、横軸は、リード位置の目標トラックT[n]の中心線からのオフセット(単位はnm)を示す。
【0034】
図4(a),(b),(c)に示すリード成否のプロファイル(VMMプロファイル)からは、隣接トラック書き込み回数の増加に従ってVMMが悪化すると共に、VMMの最小値を得るためのリード位置の最適点(最適リード位置)が、目標トラックT[n]の中心線からずれていくことが分かる。つまり、最適リード位置の目標トラックT[n]の中心線からのオフセット値(以下、最適リードオフセット値と称することもある)がシフトしていくことが分かる。
【0035】
図5は、図4(a),(b),(c)に示すVMMプロファイルに基づいて取得される、隣接トラック書き込み回数が1,10,100,1000のそれぞれの場合の最適リード位置をゾーン毎にプロットし直した折れ線グラフを示す。図5から、例えば最外周ゾーンZ0(#0)において隣接トラック書き込み回数が1000回になると、最適リード位置は4.8nm程度となり、目標トラックT[n]の中心線から4.8nm程度のずれが発生していることが分かる。このずれ、つまりオフセット(リードオフセット)を考慮して、リード位置を最適リード位置に補正するには、当該リードオフセットを例えば一定値ずつ変えながらエラーレートあるいはVMMが最小となる最適点を探索する処理を実行すればよい。しかし、このような処理を実行した場合、HDD10のパフォーマンスを著しく阻害することになる。そこで本実施形態では、以下に述べるように、イレーズ幅テーブル152(図6参照)を利用して最適リード位置を設定するようにしている。
【0036】
図6は、コントローラ15の主要な構成を、当該コントローラ15と関係する周辺の構成と共に示すブロック図である。
コントローラ15は、書き込み回数メモリ151、イレーズ幅テーブル152、コマンド解析モジュール153、更新モジュール154、テーブルアクセスモジュール155、リードオフセット設定モジュール156及びサーボ制御器157を備えている。
【0037】
書き込み回数メモリ151は、例えば、ヘッド毎で且つシリンダ毎(つまりトラック毎)のデータの書き込み回数を格納する。書き込み回数メモリ151における書き込み回数の格納形式の一例を図7に示す。図7の例では、ヘッド番号m(m=0,1)、シリンダ番号n(n=0,1,…p−1)で指定されるトラックT[m,n]の書き込み回数は、N[m,n]で示される。
【0038】
イレーズ幅テーブル152は、ヘッド毎、シリンダ毎で且つ書き込み回数毎のイレーズ幅E(+),E(−)を予め登録する。つまりイレーズ幅テーブル152は、トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)を予め登録する。本実施形態において、書き込み回数の最大値qは、トラックリフレッシュを実行すべきか否かの判定に用いられる閾値より小さく、例えば「閾値−1」である。トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)は、後述するように、予め測定及び推定可能である。本実施形態では、この測定及び推定結果に基づいてイレーズ幅テーブル152が設定される。イレーズ幅テーブル152は、例えばフラッシュメモリのような不揮発性メモリに保存されている。
【0039】
図8は、イレーズ幅テーブル152のデータ構造の一例を示す。図8の例では、ヘッド番号(m=0,1)、シリンダ番号n(n=0,1,…p−1)で指定されるトラックT[m,n]の書き込み回数N(N=N[m,n]=0,1,…q)に対応するイレーズ幅E(+)及びE(−)は、それぞれ、E(+)[m,n,N]及びE(−)[m,n,N]で示される。
【0040】
図9は、イレーズ幅テーブル152の示す、トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)の概念を説明するための図である。図9から明らかなように、イレーズ幅(内周側イレーズ幅)E(+)は外周側のトラックほど広くなり、イレーズ幅(外周側イレーズ幅)E(−)は内周側のトラックほど広くなる。
【0041】
再び図6を参照すると、コマンド解析モジュール153は、ホスト20から転送されたコマンドを解析し、当該コマンドの指定する動作を制御する。更新モジュール154は、解析されたコマンドに応じてディスク11上のトラックT[m,n]にデータが書き込まれる場合に、書き込み回数メモリ151に格納されている当該トラックT[m,n]の書き込み回数をインクリメントする。また更新モジュール154は、トラックT[m,n]の書き込み回数がトラックリフレッシュのための閾値を超えたために、当該トラックT[m,n]に隣接するトラックT[m,n−1],T[m,n+1]がリフレッシュされた場合、従来技術と同様に、書き込み回数メモリ151に格納されている、当該トラックT[m,n]の書き込み回数をゼロにリセットする。
【0042】
テーブルアクセスモジュール155は、解析されたコマンドがリードコマンドであり、当該リードコマンドの指定するトラック(つまり目標トラック)からデータを読み出すために、当該目標トラックにヘッド12を位置付ける場合に、イレーズ幅テーブル152にアクセスする。テーブルアクセスモジュール155はイレーズ幅テーブル152から、目標トラックにディスク11の外周側で隣接するトラックの書き込み回数(隣接トラック書き込み回数)に対応する内周側イレーズ幅E(+)及当該目標トラックにディスク11の内周側で隣接するトラックの書き込み回数に対応する外周側イレーズ幅E(−)を取得する。
【0043】
リードオフセット設定モジュール156は、取得された内周側イレーズ幅E(+)及び外周側イレーズ幅E(−)に基づいて、ヘッド12が位置付けられるべき目標トラック上の位置(リード位置)の当該目標トラックの中心線からのオフセット量を、リードオフセット値として設定する。
【0044】
サーボ制御器157は、ヘッド12を最適リード位置に位置付けるリード位置決め制御系158の主要素である。サーボ制御器157は、ヘッド12(より詳細には、ヘッド12のヘッド素子RE)の最適リード位置からのずれ(位置誤差)を圧縮するようにVCM142をフィードバック制御する。
【0045】
一般に、最適リード位置は目標トラックT[n]の中心線の位置である。しかし本実施形態では、テーブルアクセスモジュール155によって外周側隣接トラックT[n−1]の内周側イレーズ幅E(+)及び内周側隣接トラックT[n+1]の外周側イレーズ幅E(−)が取得された場合、図3を参照しての前述の説明からも明らかなように、最適リード位置は、目標トラックT[n]の中心線からx=(E(+)−E(−))/2だけずれた位置として決定される。(E(+)−E(−))/2は、ヘッド12のヘッド素子REを最適リード位置に位置付けるためのリードオフセット値であり、リードオフセット設定モジュール156によって算出される。。
【0046】
次に、本実施形態の動作について、ホスト20からHDD10に転送されたリードコマンドに応じて、ヘッド12を目標トラックに位置付ける場合を例に、図10のフローチャートを参照して説明する。
【0047】
まず、ホスト20からHDD10にコマンドが転送され、当該転送されたコマンドがHDD10のコントローラ15で受信されたものとする。この受信コマンドが、ヘッド番号m、シリンダ番号nで示されるトラックT[m,n](つまり目標トラックT[m,n])からのデータの読み出しを指定するリードコマンドであるものとする。また、ヘッド番号mで示されるヘッドがヘッド12であるものとする。
【0048】
コントローラ15のコマンド解析モジュール153は、受信されたリードコマンドを解析する(ステップ101)。このリードコマンドの解析結果に基づいて、コントローラ15内では、ヘッド12のリード素子REの中央位置を最適リード位置に位置付けるための制御が次のように行われる。以下の説明では、目標トラックT[m,n]にディスク11の外周側で隣接するトラックを、トラックT[m,n−1]または外周隣接トラックT[m,n−1]と表現する。また、目標トラックT[m,n]にディスク11の内周側で隣接するトラックを、トラックT[m,n+1]または内周隣接トラックT[m,n+1]と表現する。
【0049】
まず、コマンド解析モジュール153は、リードコマンドの解析の結果に基づいて、リードされるべき目標トラックT[m,n]のヘッド番号m及びシリンダ番号nをテーブルアクセスモジュール155に通知する(ステップ102)。
【0050】
するとコントローラ15のテーブルアクセスモジュール155は、書き込み回数メモリ151を参照することにより、トラックT[m,n−1]及びT[m,n+1]それぞれの書き込み回数N1及びN2を取得する(ステップ103)。つまりテーブルアクセスモジュール155は、ヘッド番号m及びシリンダ番号n−1に対応付けて、書き込み回数メモリ151に格納されている、トラックT[m,n−1]にデータが書き込まれた回数N[m,n−1]を、当該トラックT[m,n−1]の書き込み回数N1として取得する。またテーブルアクセスモジュール155は、ヘッド番号m及びシリンダ番号n+1に対応付けて、書き込み回数メモリ151に格納されている、トラックT[m,n+1]にデータが書き込まれた回数N[m,n+1]を、当該トラックT[m,n+1]の書き込み回数N2として取得する。
【0051】
次にテーブルアクセスモジュール155はイレーズ幅テーブル152にアクセスすることにより、イレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]を取得する(ステップ104)。つまりテーブルアクセスモジュール155は、トラックT[m,n−1]及び書き込み回数N1に対応付けてイレーズ幅テーブル152に格納されている2つのイレーズ幅のうちの内周側イレーズ幅E(+)を、イレーズ幅E(+)[m,n−1,N1]として取得する。またテーブルアクセスモジュール155は、トラックT[m,n+1]及び書き込み回数N2に対応付けてイレーズ幅テーブル152に格納されている2つのイレーズ幅のうちの外周側イレーズ幅E(−)を、イレーズ幅E(−)[m,n+1,N2]として取得する。
【0052】
このように本実施形態では、イレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]をイレーズ幅テーブル152から直接取得することができる。その理由は、イレーズ幅テーブル152に、ディスク11上の全てのトラック及び書き込み回数の最大値qまでの全ての書き込み回数に対応するイレーズ幅E(+)及びE(−)が登録されているためである。
【0053】
しかしイレーズ幅テーブル152に、予め定められたトラックの予め定められた書き込み回数に対応するイレーズ幅E(+)及びE(−)のみが登録される構成であっても構わない。例えばイレーズ幅テーブル152に、ゾーンZ0〜Z28(M=29)内の相対位置が同一のトラック(以下、代表トラックと称する)の書き込み回数1,10,100及び1000のそれぞれに対応するイレーズ幅E(+)及びE(−)のみが登録される構成であっても構わない。このような構成において、トラックT[m,n−1]及び書き込み回数N1に対応するイレーズ幅(つまり取得されるべきイレーズ幅)、あるいはトラックT[m,n+1]及び書き込み回数N2に対応するイレーズ幅(つまり取得されるべきイレーズ幅)がイレーズ幅テーブル152に登録されていないものとする。この場合、取得されるべきイレーズ幅を、当該イレーズ幅テーブル152に基づいて周知の補間法(例えば線形補間法)で補間により決定すればよい。
【0054】
また、例えば、トラックT[m,n−1]及び書き込み回数N1にそれぞれ最も近いトラック及び書き込み回数に対応付けてイレーズ幅テーブル152に登録されている内周側イレーズ幅E(+)を、イレーズ幅E(+)[m,n−1,N1]として用いてもよい。同様に、トラックT[m,n+1]及び書き込み回数N2にそれぞれ最も近いトラック及び書き込み回数に対応付けてイレーズ幅テーブル152に登録されている外周側イレーズ幅E(−)を、イレーズ幅E(−)[m,n+1,N2]として用いてもよい。
【0055】
リードオフセット設定モジュール156は、テーブルアクセスモジュール155によって取得されたイレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]に基づいて、目標トラックT[m,n]の最適リード位置にヘッド12のリード素子REを位置付ける際のリードオフセット値(最適リードオフセット値)x[m,n]を算出する(ステップ105)。より具体的には、リードオフセット設定モジュール156は、リードオフセット値x[m,n]を、次式
x[m,n]
=(E(+)[m,n−1,N1]−E(−)[m,n+1,N2])/2
に従って算出する。
【0056】
このことから明らかなように、イレーズ幅テーブル152に登録されている、トラック毎の書き込み回数に対応するイレーズ幅E(+),E(−)は、リードオフセット値を決定するためのリードオフセットパラメータ値であるといえる。リードオフセット設定モジュール156は、算出されたリードオフセット値x[m,n]を、リード位置決め制御系158に設定する(ステップ106)。
【0057】
リード位置決め制御系158では、設定されたリードオフセット値x[m,n]が目標トラックT[m,n]の中央線の位置(通常の目標位置)に加算され、加算結果の示す位置が、新たな目標位置、つまり最適リード位置として決定される。リード位置決め制御系158のサーボ制御器157は、この新たな目標位置にヘッド12のリード素子REが位置付けられるように、VCM142を制御する。つまりサーボ制御器157は、目標トラックT[m,n]の中央線の位置からリードオフセット値x[m,n]だけずれた最適リード位置にヘッド12のリード素子REを位置付けるための位置決め制御を実行する(ステップ107)。ここで、目標トラックT[m,n]の中央線の位置を0とするならば、最適リード位置はリードオフセット値x[m,n]に一致する。
【0058】
このように本実施形態によれば、目標トラックT[m,n]の外周側隣接トラックT[m,n−1]の書き込み回数N1に対応する内周側イレーズ幅E(+)[m,n−1,N1]と、目標トラックT[m,n]の内周側隣接トラックT[m,n+1]の書き込み回数N2に対応する外周側イレーズ幅E(−)[m,n+1,N2]とに基づいて、リード位置が補正される。つまり、エラーレートが最小となる最適リード位置とのずれが補正され、ヘッド12のリード素子が当該最適リード位置に位置付けられる。これにより、目標トラックに隣接するトラックへのデータ書き込みの回数の増加に伴う当該隣接トラックのイレーズ領域(イレーズ幅)の広がりに起因して、目標トラックからデータを読み出す場合のエラーレートが高くなるのを防止できる。
【0059】
この本実施形態の効果について、図11を参照して説明する。
図11(a)は、ヘッド12に対応するディスク11の記録面上のゾーン毎の内周側イレーズ幅を測定した結果を、隣接トラック書き込み回数が1,10,100,1000のそれぞれについて示す。図11(b)は、ヘッド12に対応するディスク11の記録面上のゾーン毎の外周側イレーズ幅を測定した結果を、隣接トラック書き込み回数が1,10,100,1000のそれぞれについて示す。ここでは、ゾーンZ0〜Z28(M=29)内のそれぞれの代表トラックの内周側イレーズ幅及び外周側イレーズ幅が、当該ゾーンZ0〜Z28の内周側イレーズ幅及び外周側イレーズ幅として測定される。
【0060】
また、図11(a)は、隣接トラック書き込み回数が1,10,100,1000のそれぞれについてのゾーン毎の内周側イレーズ幅の測定結果を、それぞれ多項式(例えば2次多項式)で近似した曲線111a,112a,113a,114aも示す。一方、図11(b)は、隣接トラック書き込み回数が1,10,100,1000のそれぞれについてのゾーン毎の外周側イレーズ幅測定結果を、それぞれ多項式(例えば2次多項式)で近似した曲線111b,112b,113b,114bも示す。
【0061】
曲線111a,112a,113a,114a,111b,112b,113b,114bは、所定の多項式で近似される。これらの曲線の違いは、多項式の係数(多項式係数)の違いである。図8に示すデータ構造のイレーズ幅テーブル152は、図11(a)及び(b)の測定結果(より詳細には、測定結果から取得された曲線)に基づいて設定されたものである。つまり、各ゾーンの代表トラック以外のトラック群の、隣接トラック書き込み回数1,10,100,1000に対応する内周側イレーズ幅及び外周側イレーズ幅は、上述の曲線から決定(推定)される。また、各トラックの隣接トラック書き込み回数1,10,100,1000以外の書き込み回数に対応する内周側イレーズ幅及び外周側イレーズ幅も、上述の曲線から例えば補間により決定される。
【0062】
曲線111a,112a,113a,114a,111b,112b,113b,11は、多項式と、対応する多項式係数とに基づいて特定できる。よって、曲線111a,112a,113a,114a,111b,112b,113b,114bにそれぞれ対応する多項式係数を不揮発性メモリに予め格納しておき、イレーズ幅テーブル152に代えて、適宜対応する多項式係数を用いるようにしても構わない。つまり、多項式と目的とする隣接トラック書き込み回数に対応する多項式係数とに基づいて、目標トラックの外周側隣接トラック及び内周側隣接トラックの、それぞれ内周側イレーズ幅及び外周側イレーズ幅を計算するようにしてもよい。
【0063】
曲線111a,112a,113a,114a,111b,112b,113b,114b(にそれぞれ対応する多項式)は、トラック毎あるいはゾーン毎の書き込み回数に依存する。したがってリードオフセット設定モジュール156は、トラック毎あるいはゾーン毎の書き込み回数に基づいてリードオフセット値xを設定することが可能である。
【0064】
図11(c)は、図5との比較のために、上述のようにして設定されたイレーズ幅テーブル152に基づいて決定される、隣接トラック書き込み回数が1,10,100,1000のそれぞれについてのゾーン毎の最適リード位置(=リードオフセット値)xを表す曲線の例を示す。ここで、例えばディスク11の外周部に位置するゾーンZ0(#0)内の目標トラックT[n]からデータを読み出すものとする。このとき、隣接トラックT[n−1]及びT[n+1]へのデータの書き込み回数が1000であるものとすると、図11(c)に示す最適リード位置はほぼ4nmである。この値は、図4(a)のVMMが最小となる最適点(リード位置)の、目標トラックT[n]の中心線からのずれ(4.8nm程度)を十分補償可能である。
【0065】
つまり本実施形態によれば、目標トラックが属するゾーンに対応する最適リード位置(リードオフセット値)xに基づいて、ヘッド12のリード素子REの位置決めを制御することにより、当該目標トラックからデータを読み出す際のエラーレートを低減することができる。また、仮にリードエラーが発生しても、リード位置を例えば一定オフセット量ずつずらしながらリード位置の最適点を検索するための動作(つまりオフセット検索)を繰り返すリードリトライにおける、当該繰り返しの回数を減らすことができる。その理由は、オフセット探索の開始位置が最適点に近くなるためである。これによりHDD10のパフォーマンスを向上させることができる。
【0066】
[第1の変形例]
次に上記実施形態の第1の変形例について、図6を援用して説明する。
上記実施形態では、書き込み回数メモリ151は、トラック毎(ヘッド毎で且つシリンダ毎)の書き込み回数を格納する。これに対して第1の変形例では、書き込み回数メモリ151は、ゾーン毎(より詳細には、ヘッド毎で且つゾーン毎)の書き込み回数を格納する。ゾーン毎の書き込み回数は、対応するゾーンに属する全てのトラックの書き込み回数の総和である。一方、イレーズ幅テーブル152は、ゾーン毎(ヘッド毎、ゾーン毎)で且つ書き込み回数毎のイレーズ幅E(+),E(−)を予め登録する。
【0067】
この場合、テーブルアクセスモジュール155は、目標トラックにディスク11の外周側で隣接する外周隣接トラックが属するゾーンの書き込み回数及び当該目標トラックにディスク11の内周側で隣接する内周隣接トラックが属するゾーンの書き込み回数を書き込み回数メモリ151から取得する。またテーブルアクセスモジュール155は、取得された外周隣接トラックが属するゾーンの書き込み回数及び内周隣接トラックが属するゾーンの書き込み回数にそれぞれ対応するイレーズ幅E(+)及びE(−)をイレーズ幅テーブル152から取得する。第1の変形例は、各ゾーンにおいて、当該ゾーン内のそれぞれのトラックへのデータ書き込みが一様に行われる場合に適している。第1の変形例によれば、書き込み回数メモリ151及びイレーズ幅テーブル152に必要な記憶容量を低減できる。
【0068】
[第2の変形例]
次に上記実施形態の第2の変形例について、図6を援用して説明する。
第2の変形例において、書き込み回数メモリ151は、トラック毎(ヘッド毎、シリンダ毎)で且つセクタ毎の書き込み回数を格納する。この場合、目標トラックがトラックT[m,n]であるものとすると、テーブルアクセスモジュール155は、当該トラックT[m,n]内の目標セクタ(データが読み出されるべきセクタ)に隣接する、トラックT[m,n−1]内の第1のセクタ及びトラックT[m,n+1]内の第2のセクタのそれぞれの書き込み回数N1及びN2を書き込み回数メモリ151から取得する。
【0069】
次にテーブルアクセスモジュール155は、取得されたトラックT[m,n−1]内の第1のセクタの書き込み回数N1及びトラックT[m,n+1]内の第2のセクタの書き込み回数N2を、トラックT[m,n−1]の書き込み回数N1及びトラックT[m,n+1]の書き込み回数N2として用いる。これによりテーブルアクセスモジュール155は、上記実施形態と同様に、イレーズ幅テーブル152からイレーズ幅E(+)[m,n−1,N1]及びE(−)[m,n+1,N2]を取得する。以降の動作は上記実施形態と同様であり、目標トラックT[m,n]内の目標セクタからデータを読み出す場合のエラーレートを効率的に低減できる。第2の変形例は、トラック内のそれぞれのセクタの間で、書き込み回数が著しく異なる場合に適している。
【0070】
以上説明した少なくとも1つの実施形態によれば、書き込み回数増加に起因する読み出しエラーレートの悪化またはリードリトライの発生回数の増加を防止できる、データリードのためのヘッド位置決めにオフセットを用いる磁気ディスク装置及びヘッド位置決め方法を提供することができる。
【0071】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0072】
10…HDD(磁気ディスク装置)、11…ディスク、12…ヘッド、14…アクチュエータ、15…コントローラ、20…ホスト、142…VCM(ボイスコイルモータ)、151…書き込み回数メモリ、152…イレーズ幅テーブル、153…コマンド解析モジュール、154…更新モジュール、155…テーブルアクセスモジュール、156…リードオフセット設定モジュール、157…サーボ制御器、158…リード位置決め制御系。
【特許請求の範囲】
【請求項1】
ディスク上のトラック毎あるいはゾーン毎の書き込み回数を格納する書き込み回数記憶手段と、
データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定するリードオフセット設定手段と、
前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける制御手段と
を具備する磁気ディスク装置。
【請求項2】
トラック毎あるいはゾーン毎の書き込み回数に対応し、前記オフセット量の決定に用いられるリードオフセットパラメータ値が予め登録されたテーブルと、
前記テーブルにアクセスすることにより、前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの前記書き込み回数に対応するリードオフセットパラメータ値を取得するテーブルアクセス手段とを更に具備し、
前記リードオフセット設定手段は、前記取得されたリードオフセットパラメータ値に基づいて、前記オフセット量を設定する
請求項1記載の磁気ディスク装置。
【請求項3】
前記トラック毎あるいは前記ゾーン毎の書き込み回数に対応するイレーズ幅の測定結果が前記リードオフセットパラメータ値として前記テーブルに登録されている請求項2記載の磁気ディスク装置。
【請求項4】
前記イレーズ幅の測定結果は、対応するトラック内あるいは対応するゾーンに属する各トラック内の前記所定位置を基準とする前記ディスクの内周方向の第1のイレーズ幅E(+)と、前記ディスクの外周方向の第2のイレーズ幅E(−)とを含み、
前記テーブルアクセス手段は、前記リードオフセットパラメータ値として、前記目標トラックに前記ディスクの外周側で隣接する外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に対応する第1のイレーズ幅E(+)、及び前記目標トラックに前記ディスクの内周側で隣接する内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に対応する第2のイレーズ幅E(−)を前記テーブルに基づいて取得し、
前記リードオフセット設定手段は、前記取得された第1のイレーズ幅E(+)及び第2のイレーズ幅E(−)に基づいて前記オフセット量を設定する
請求項3記載の磁気ディスク装置。
【請求項5】
前記リードオフセット設定手段は、(E(+)−E(−))/2の計算により前記オフセット量を算出する
請求項4記載の磁気ディスク装置。
【請求項6】
前記テーブルアクセス手段は、前記外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に対応する前記第1のイレーズ幅E(+)、あるいは前記内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に対応する第2のイレーズ幅E(−)が前記テーブルに登録されていない場合、前記第1のイレーズ幅E(+)あるいは前記第2のイレーズ幅E(−)を前記テーブルに基づいて補間する請求項5記載の磁気ディスク装置。
【請求項7】
前記テーブルアクセス手段は、前記外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に対応する前記第1のイレーズ幅E(+)が前記テーブルに登録されていない場合、前記外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に最も近い第1のトラックまたは第1のゾーンに対応するイレーズ幅E(+)を前記テーブルから前記第1のイレーズ幅E(+)として取得し、前記内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に対応する第2のイレーズ幅E(−)が前記テーブルに登録されていない場合、前記内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に最も近い第2のトラックまたは第2のゾーンに対応するイレーズ幅E(−)を前記テーブルから前記第2のイレーズ幅E(−)として取得する請求項5記載の磁気ディスク装置。
【請求項8】
トラック毎あるいはゾーン毎の書き込み回数を格納する書き込み回数記憶手段を備えた磁気ディスク装置におけるヘッド位置決め方法であって、
データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数を取得し、
前記隣接トラックまたは前記隣接トラックが属するゾーンの前記取得された書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定し、
前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける
ヘッド位置決め方法。
【請求項1】
ディスク上のトラック毎あるいはゾーン毎の書き込み回数を格納する書き込み回数記憶手段と、
データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定するリードオフセット設定手段と、
前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける制御手段と
を具備する磁気ディスク装置。
【請求項2】
トラック毎あるいはゾーン毎の書き込み回数に対応し、前記オフセット量の決定に用いられるリードオフセットパラメータ値が予め登録されたテーブルと、
前記テーブルにアクセスすることにより、前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの前記書き込み回数に対応するリードオフセットパラメータ値を取得するテーブルアクセス手段とを更に具備し、
前記リードオフセット設定手段は、前記取得されたリードオフセットパラメータ値に基づいて、前記オフセット量を設定する
請求項1記載の磁気ディスク装置。
【請求項3】
前記トラック毎あるいは前記ゾーン毎の書き込み回数に対応するイレーズ幅の測定結果が前記リードオフセットパラメータ値として前記テーブルに登録されている請求項2記載の磁気ディスク装置。
【請求項4】
前記イレーズ幅の測定結果は、対応するトラック内あるいは対応するゾーンに属する各トラック内の前記所定位置を基準とする前記ディスクの内周方向の第1のイレーズ幅E(+)と、前記ディスクの外周方向の第2のイレーズ幅E(−)とを含み、
前記テーブルアクセス手段は、前記リードオフセットパラメータ値として、前記目標トラックに前記ディスクの外周側で隣接する外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に対応する第1のイレーズ幅E(+)、及び前記目標トラックに前記ディスクの内周側で隣接する内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に対応する第2のイレーズ幅E(−)を前記テーブルに基づいて取得し、
前記リードオフセット設定手段は、前記取得された第1のイレーズ幅E(+)及び第2のイレーズ幅E(−)に基づいて前記オフセット量を設定する
請求項3記載の磁気ディスク装置。
【請求項5】
前記リードオフセット設定手段は、(E(+)−E(−))/2の計算により前記オフセット量を算出する
請求項4記載の磁気ディスク装置。
【請求項6】
前記テーブルアクセス手段は、前記外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に対応する前記第1のイレーズ幅E(+)、あるいは前記内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に対応する第2のイレーズ幅E(−)が前記テーブルに登録されていない場合、前記第1のイレーズ幅E(+)あるいは前記第2のイレーズ幅E(−)を前記テーブルに基づいて補間する請求項5記載の磁気ディスク装置。
【請求項7】
前記テーブルアクセス手段は、前記外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に対応する前記第1のイレーズ幅E(+)が前記テーブルに登録されていない場合、前記外周隣接トラックまたは前記外周隣接トラックが属するゾーンの書き込み回数に最も近い第1のトラックまたは第1のゾーンに対応するイレーズ幅E(+)を前記テーブルから前記第1のイレーズ幅E(+)として取得し、前記内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に対応する第2のイレーズ幅E(−)が前記テーブルに登録されていない場合、前記内周隣接トラックまたは前記内周隣接トラックが属するゾーンの書き込み回数に最も近い第2のトラックまたは第2のゾーンに対応するイレーズ幅E(−)を前記テーブルから前記第2のイレーズ幅E(−)として取得する請求項5記載の磁気ディスク装置。
【請求項8】
トラック毎あるいはゾーン毎の書き込み回数を格納する書き込み回数記憶手段を備えた磁気ディスク装置におけるヘッド位置決め方法であって、
データリードのためにヘッドが目標トラックに位置付けられる際に、前記書き込み回数記憶手段に格納されている前記目標トラックの隣接トラックまたは前記隣接トラックが属するゾーンの書き込み回数を取得し、
前記隣接トラックまたは前記隣接トラックが属するゾーンの前記取得された書き込み回数に応じて、前記ヘッドが位置付けられるべきリード位置の前記目標トラック内の所定位置からのオフセット量を設定し、
前記設定されたオフセット量だけ前記所定位置からずれた位置に前記ヘッドを位置付ける
ヘッド位置決め方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−79387(P2012−79387A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−225940(P2010−225940)
【出願日】平成22年10月5日(2010.10.5)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年10月5日(2010.10.5)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]