
データ入出力方法
【課題】画像インジケーターの提供。
【解決手段】コンテンツデータ部(contentpart)及びインジケーター認識部(header part)を含む画像インジケーターである。コンテンツデータ部は、複数個の画像マイクロユニットを含み、且つコンテンツデータ部が占有するエリアは複数の状態エリアに区分される。その中の各状態エリアには全て画像マイクロユニットが設置され、また当該画像マイクロユニットは選択的に前記状態エリアを等分して形成する複数のサブエリア中の1つに位置する。インジケーター認識部は複数個の画像マイクロユニットを含み、且つ各画像マイクロユニットは予め定められた方式で排列され、画像インジケーターを識別するヘッダー情報を提供させる。
【解決手段】コンテンツデータ部(contentpart)及びインジケーター認識部(header part)を含む画像インジケーターである。コンテンツデータ部は、複数個の画像マイクロユニットを含み、且つコンテンツデータ部が占有するエリアは複数の状態エリアに区分される。その中の各状態エリアには全て画像マイクロユニットが設置され、また当該画像マイクロユニットは選択的に前記状態エリアを等分して形成する複数のサブエリア中の1つに位置する。インジケーター認識部は複数個の画像マイクロユニットを含み、且つ各画像マイクロユニットは予め定められた方式で排列され、画像インジケーターを識別するヘッダー情報を提供させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は画像識別(pattern/imagerecognition)を利用して読み取ることができる画像インジケーターに関するもので、当該画像インジケーターは物体表面上に形成され、且つインジケーターデータをマッピングする。
【背景技術】
【0002】
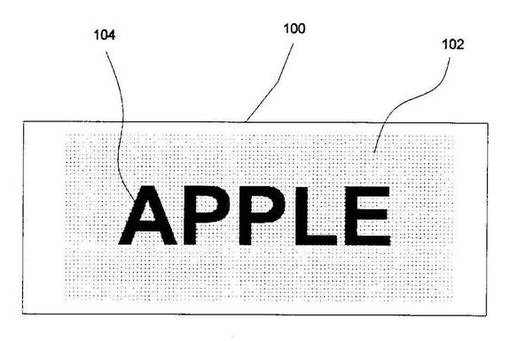
図1は物体表面100上に形成される画像インジケーター(graphical indicator) 102を表示するイメージ図である。図1に示すように、画像インジケーター102は多くの画像マイクロユニット(graphicalmicro−units)が組み合わされて成り、画像マイクロユニットは相当微小であるため、視覚上見過ごされやすい、或いは人の目に地色として解読される。画像インジケーター102とメイン情報(main information) 104 (例:図1の文字図案”APPLE”)は、例えば印刷等の方式を利用し、例えば紙等の物体表面100上に共同形成される。画像インジケーター102はインジケーターデータをマッピングし、且つ人の目のメイン情報104受信に影響しない。
【0003】
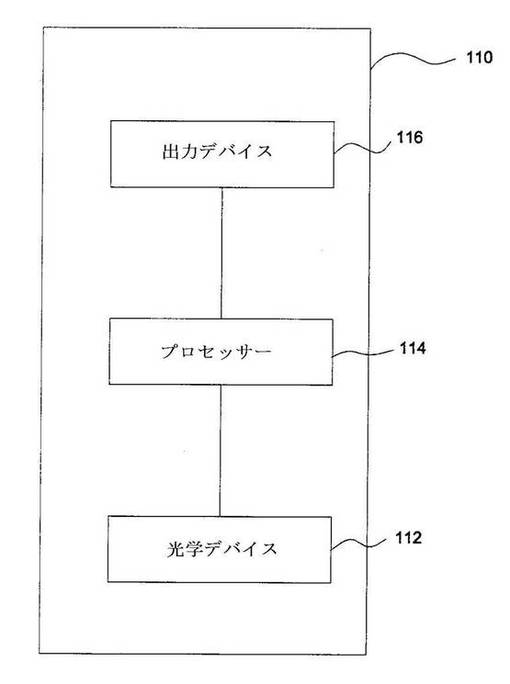
図2は電子システム110を表示する図である。その電子システム110は光学デバイス112、プロセッサー114及び出力デバイス116を有し、画像識別ステップによりその画像インジケーター102を読み取る。光学デバイス112、プロセッサー114、及び出力デバイス116は互いに有線或いは無線方式で接続されている。光学デバイス112は物体表面を読み取り、拡大影像を取得し、続いてプロセッサー114が拡大影像中から画像インジケーター102を取り出し、さらにデジタルデータに転換すると同時にそのデジタルデータに対応する付加情報を取得する。最後に、出力デバイス116がこの付加情報を受け取ると同時に、予め定められた形式でこの付加情報を出力する。こうして、画像インジケーター102の設計により、例えばブックページ等のよく見かける物体の表面上に、より多くの付加情報をロードすることができる。
【0004】
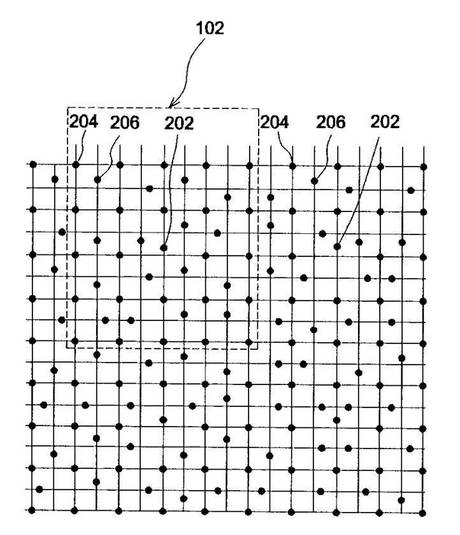
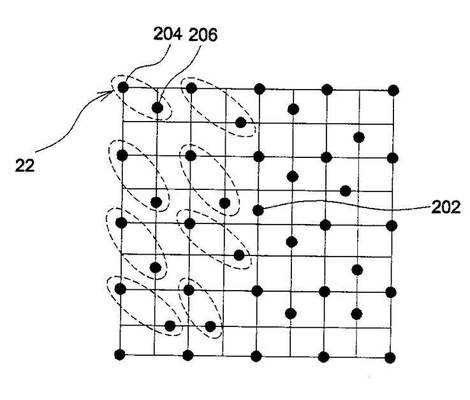
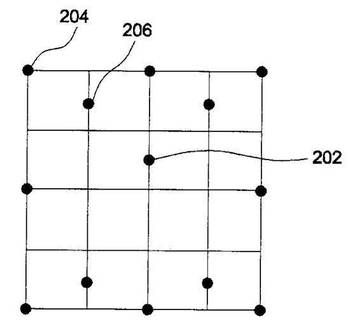
図3は、周知の多くの画像インジケーター102を含む図案設計を表示する図である。図3に示すように、1つの画像インジケーター102 (破線で囲んだエリア)は、1つのキーポイント202、複数のグリッド204、及び複数の情報ポイント206が予め定められた規則に従って排列して形成される。詳しく言うと、1つの画像インジケーター102はキーポイント202を中心とし、周囲に多くのグリッド204を配置する。その中で、4個のグリッド204毎に1つの角型ブロックを配置し、且つ4個のグリッド204毎に中心を1つのバーチャルポイントとする。角型ブロック内に位置する情報ポイント206は、選択的にそのバーチャルポイントの上、下、左、右方向へ一定距離偏移させることができ、それぞれ異なる数値で表し、さらに前記の電子システム110により読み出す。キーポイント202は1つの画像インジケーター102中心のグリッド204を予め定められた方向へ一定距離偏移させる方式で形成される。キーポイント202は画像インジケーター102の参考方向を提供することができ、光学デバイス112が物体表面を読み取り、拡大影像を取得する時の方向付けの参考とする。さらに、4個のグリッド204は1つの角型ブロック方式で配置され、画像インジケーター102を読み取り、印刷する時に変形が起こった場合、校正の参考とすることができる。
【0005】
図1に示すように、画像インジケーター102は通常、物体表面100上のメイン情報104と共存する。そのため、画像マイクロユニットの密度が高くなるほど、視覚効果が悪くなり、且つ人の目で画像インジケーター102の存在を感知しやすくなり、しかも画像インジケーター102とメイン情報104が混乱する機会が増加する。もう一方では、画像インジケーター102が有限の物体表面エリアに形成される時、同じ情報量が提供されるという前提のもと、画像マイクロユニットの分布密度が高すぎると、2つの隣り合う画像マイクロユニット間の距離が小さくなりすぎる。そのため画像マイクロユニットが、例えば印刷方式で紙上に形成される時、比較的はっきりした視覚干渉を起こす。この視覚干渉を減らしたい時は、通常、画像マイクロユニットの寸法をさらに縮小する必要があり、このようにしてプリンター及び紙の解析度の要求を高める。且つ印刷時にも印刷漏れしやすく、相対的に印刷の困難さが増し、また光学デバイスの判読ミスが起りやすく、区別が難しくなる。図3に示す周知の画像インジケーター102の設計方式は、画像マイクロユニットの密度が高くなりすぎることが明らかで、上記の種々の問題が発生する。
【発明の概要】
【発明が解決しようとする課題】
【0006】
このため、本発明の目的は比較的低い画像マイクロユニット密度を提供し、且つ少量の画像マイクロユニットで画像インジケーターを構成することで、上記周知の設計の種々問題を避けることができる、画像インジケーターの設計を提供することである。
【0007】
本発明に基づく設計では、画像インジケーターが物体の表面上に形成され、且つインジケーターデータをマッピングする。またその画像インジケーターはコンテンツデータ部(contentpart)及びインジケーター認識部(header part)を含む。コンテンツデータ部は複数個の画像マイクロユニット(micro−units)を含み、且つコンテンツデータ部が占有するエリアは複数の状態エリアに区分される。その中で各状態エリアには全て画像マイクロユニットが設置され、且つ画像マイクロユニットは選択的に前記状態エリアを等分して形成する複数のサブエリア中の1つに位置する。インジケーター認識部は複数個の画像マイクロユニットを含み、且つ画像マイクロユニットは予め定められた方式で排列され、その画像インジケーターを識別するヘッダー情報(headerinformation)を提供させる。インジケーター認識部はコンテンツデータ部のボーダー上に分布し、且つコンテンツデータ部の画像マイクロユニットの分布エリアを定めることができる。
【0008】
さらに、コンテンツデータ部の設計が9個の画像マイクロユニットを有し、且つ9個の状態エリアに区分され、さらに各状態エリアが4個のサブエリアに等分される時、画像マイクロユニットは選択的にその第1、第2、第3、或いは第4サブエリアに設置され、そのコンテンツデータ部に262144種の状態組み合わせを持たせることができる。その262144種の状態組み合わせ中から65536種の状態組み合わせを取り出し、ユニコード(Unicode)のコード構造中の1プレーン(plane)に属する65536個のコード位置に対応させることができる。
【0009】
本発明に基づく設計では、比較的少ないドット数(比較的低いドット密度)を用いて大量の情報量を提供することができ、こうすることで比較的良い視覚効果が提供できる。且つ人の目は比較的画像インジケーターの存在を感知しにくく、画像インジケーターと共存するメイン情報を混乱させない。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は、複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットのそれぞれは、第2の状態エリアの中心位置に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記第二画像マイクロユニットにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項2に記載の発明は、前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、線状を呈することを特徴とする請求項1に記載のデータ入出力方法である。
請求項3に記載の発明は、前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、ドット状を呈することを特徴とする請求項1に記載のデータ入出力方法である。
請求項4に記載の発明は、それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法である。
請求項5に記載の発明は、それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法である。
請求項6に記載の発明は、前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法である。
請求項7に記載の発明は、前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法である。
請求項8に記載の発明は、
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与えるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される前記参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項9に記載の発明は、前記インジケーター認識部の一部は、前記第二画像マイクロユニットの第1の分布を有し、前記インジケーター認識部の他の部分は、第二画像マイクロユニットの第2の分布を有することを特徴とする請求項8に記載のデータ入出力方法である。
請求項10に記載の発明は、前記第1の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN1であり、前記第2の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN2であり、N1はN2と異なることを特徴とする請求項9に記載のデータ入出力方法である。
請求項11に記載の発明は、前記第1の分布を有する前記インジケーター認識部において、第二画像マイクロユニットの少なくとも1つは、第1の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第2の分布を有する前記インジケーター認識部において、前記第二画像マイクロユニットの少なくとも1つは、第2の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第1の方向は前記第2の方向と異なることを特徴とする請求項9に記載のデータ入出力方法である。
請求項12に記載の発明は、前記第1の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第1の相対位置が与えられ、前記第2の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第2の相対位置が与えられ、前記第1の相対位置は前記第2の相対位置と異なることを特徴とする請求項9に記載のデータ入出力方法である。
請求項13に記載の発明は、前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、線状を呈することを特徴とする請求項8に記載のデータ入出力方法である。
請求項14に記載の発明は、前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、ドット状を呈することを特徴とする請求項8に記載のデータ入出力方法である。
請求項15に記載の発明は、それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法である。
請求項16に記載の発明は、それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法である。
請求項17に記載の発明は、前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項8に記載のデータ入出力方法である。
請求項18に記載の発明は、
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心に配置され、前記インジケーター認識部は、前記第二画像マイクロユニットの複数の候補分布から選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部により提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項19に記載の発明は、
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与え、前記インジケーター認識部は前記第二画像マイクロユニットの複数の候補分布の少なくとも2つから選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項20に記載の発明は、
それぞれコンテンツデータ部とインジケーター認識部とを含む物体の矩形領域に配列された複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一に配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記矩形領域は前記第1の状態エリアおよび前記第2の状態エリアにより構成され、該矩形領域は互いに連結された2つの第1のエッジおよび互いに連結された2つの第2のエッジを有し、前記第1の状態エリアの一部は前記第1のエッジに沿って連続的に配置される一方、前記第1の状態エリアの一部と前記第2の状態エリアの一部とは前記第2のエッジに沿って交互に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記第二画像マイクロユニットにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項21に記載の発明は、前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法である。
請求項22に記載の発明は、前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法である。
【発明の効果】
【0011】
本発明は比較的低い画像マイクロユニット密度を提供し、且つ少量の画像マイクロユニットで画像インジケーターを構成することで、上記の周知の設計の種々の問題を避けることができる、画像インジケーターの設計を提供することである。
【図面の簡単な説明】
【0012】
【図1】物体の表面上に形成される画像インジケーターを表示する図である。
【図2】画像インジケーターを読み取る電子システムを表示する図である。
【図3】周知の多くの画像インジケーターを含む図案設計を表示する図である。
【図4】本発明に基づく実施例で設計した、多くの画像インジケーターが排列し形成する図案を表示である。
【図5】図4中の画像インジケーターの拡大図である。
【図6】画像マイクロユニットの状態エリア中の設置方式を表示する図である。
【図7】図5の画像インジケーターに対応するビット配列図である。
【図8】同じ画像インジケーターにそれぞれ対応する、同じインジケーター認識部の設計を表示する図である。
【図9】2つの隣り合い異なる画像インジケーターにそれぞれ対応する、相異なるインジケーター認識部の設計を表示する図である。
【図10】2つの隣り合い異なる画像インジケーターにそれぞれ対応する、相異なるインジケーター認識部の設計を表示する図である。
【図11】本発明と周知の設計を比較する概略図である。
【図12】本発明と周知の設計を比較する概略図である。
【図13】本発明と周知の設計を比較するもう1つの概略図である。
【図14】本発明と周知の設計を比較するもう1つの概略図である。
【図15】本発明の画像インジケーターのもう1つの実施例を表す図である。
【図16】本発明の画像インジケーターのもう1つの実施例を表す図である。
【図17】本発明の画像インジケーターのもう1つの実施例を表す図である。
【図18】本発明の画像インジケーターのもう1つの実施例を表す図である。
【発明を実施するための形態】
【0013】
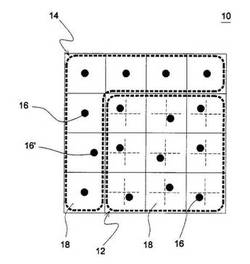
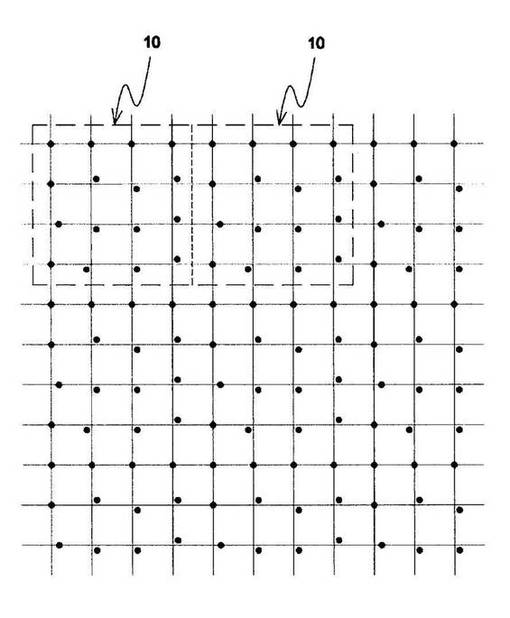
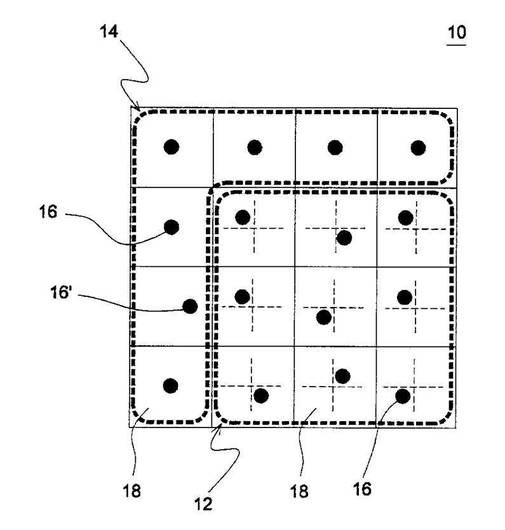
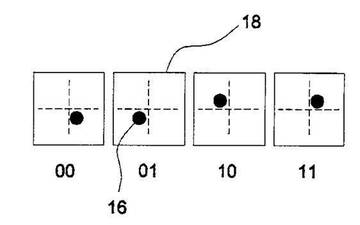
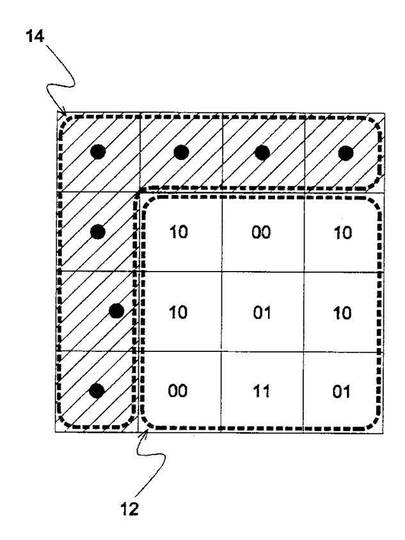
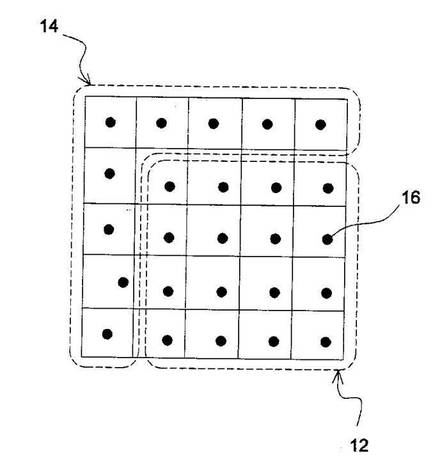
図4は本発明に基づく実施例で設計された、多くの画像インジケーター10が排列し形成する図案を表示し、図5はその中の画像インジケーター10の拡大図で、はっきりと本発明の設計を説明するものである。図5に示すように、画像インジケーター10はコンテンツデータ部(content part) 12及びインジケーター認識部(header part) 14を含む。本実施例によると、コンテンツデータ部12は9個のドット16で構成される9個の画像マイクロユニットを含み、且つそのコンテンツデータ部12の占有エリアは9個の状態エリア18に区分され、3*3の平面2次元配列の状態エリアを構成する。各状態エリア18は全て1つのドット16を含む。本実施例に基づく設計では、1つのドット16が状態エリア18中の異なる配列位置に置かれると、マッピングしたインジケーターデータ中の個別の数値で表すことを利用することができる。詳しく言うと、図6に示すように、1つの状態エリア18は4個のサブエリアに等分することができ、ドット16は選択的に右下方、左下方、左上方或いは右上方のサブエリアに設置でき、それぞれ4個の異なるビット値00、01、10或いは11で表すことができる。こうして、図5のコンテンツデータ部12が示すドット16の配置関係は、図7に示すビット配列に対応させることができる。コンテンツデータ部12が9個のドット16を有し、且つそれぞれ9個の状態エリア中に置く時、各状態エリア18が4個のサブエリアに等分されているため、各ドット16を選択的に4個のサブエリア中の1つに設置する場合、そのコンテンツデータ部12に49 (=262144)種の状態の組み合わせを持たせることができる。そこで、図5に示す画像インジケーター10の設計を利用すると、マッピングするインジケーターデータ中の262144個の異なる数値を表示することができる。そのため、本実施例によるコンテンツデータ部12の設計は、その262144種の状態組み合わせ中から、65536種の状態組み合わせを取り出し、ユニコード(Unicode)のコード構造中の1つのプレーン(plane)に属する65536個のコード位置に対応させ、その残りの状態組み合わせは、その他の用途のために保留することができる。例をあげると、チェックサムコード(checksum code)に対応させるコード位置として状態組み合わせを提供することができる。
【0014】
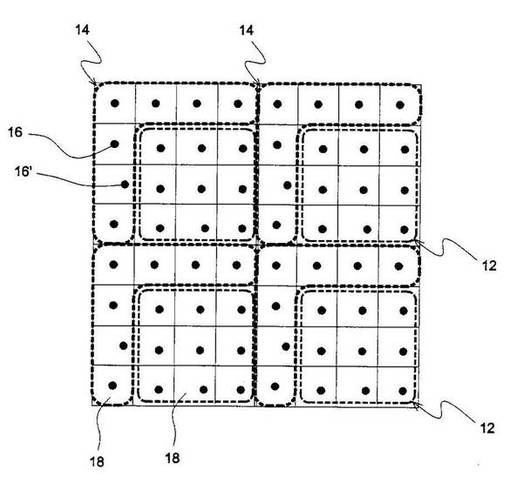
もう一方では、画像インジケーター10が1グループの画像マイクロユニットから構成されているため、インジケーター認識部14を設置して2つの隣り合う画像インジケーター10を区分する必要がある。図8に示すように、4個の画像インジケーター10は全て同じコンテンツデータ部12を持ち、また同じインジケーターデータ内容を有する。そのため、4個の画像インジケーター10には全て同じ特定のインジケーター認識部14を設置し、こうすることで、その特定のインジケーター認識部14を探し出すだけで、同じ画像インジケーター10が探し出せ、近隣の他の画像インジケーター10における干渉を受けない。インジケーター認識部14は同様に例えばドット16から構成される多くの画像マイクロユニットを含み、且つそのインジケーター認識部14の占有エリアが多くの状態エリア18に区分されている。さらに図5を参照する。本実施例に基づく設計では、インジケーター認識部14の各状態エリア18は全て状態エリア18の中心位置に設置される1つのドットを含み、そのためインジケーター認識部14は7個のドットを持つ。且つ2つの隣り合うボーダー上を9個のドットを有するコンテンツデータ部12で囲み、インジケーター認識部14をL型分布に形成させ、且つ画像インジケーター10全体を16個のドットで構成される4*4マトリックス排列とする。図5に示すように、インジケーター認識部14のドットの配列位置は全て状態エリアの中心位置に予設され、画像インジケーターがインジケーター認識部14を識別する過程をさらに速くさせることができる。但し、インジケーター認識部14中の1つのドット16'の位置は特定方向に偏移させ、その他のドット16の位置と変える必要がある。そのため画像識別(pattern/image recognition)を行い、その画像インジケーター10を読み取る時、光学デバイス(図の表示なし)が物体表面を読み取り拡大影像を取得した後、まず画像インジケーター10のインジケーター認識部14を識別するだけで、その画像インジケーター10に対する方向付けができ、コンテンツデータ部12の状態組み合わせを正確にキャプチャーすることができる。
【0015】
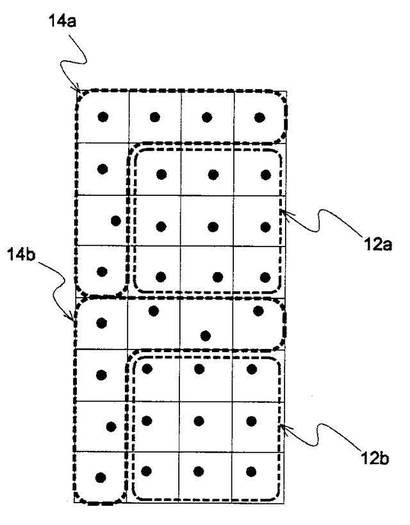
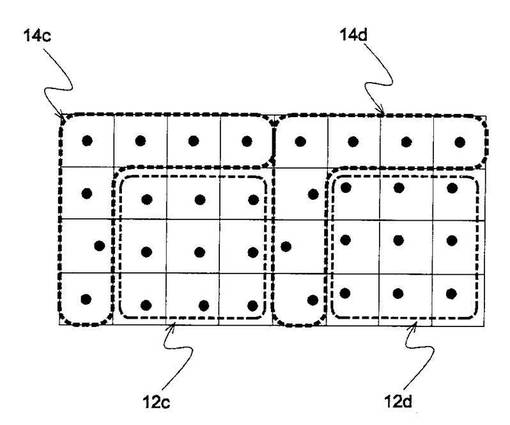
さらに、インジケーター認識部14中のドット16の配置位置を変更することで、互いに異なるインジケーター認識部14を発生させることができる。このため、各画像インジケーター10がコンテンツデータ部12の状態組み合わせを調整し、異なる数値をマッピングすると、2つの異なる数値の画像インジケーター10をそれぞれマッピングして、相異なるインジケーター認識部14によって両者を区別することができる。図9に示すように、2つのドット16の配置位置が異なる相異なるインジケーター認識部14a及び14bを、上下に隣り合い異なるコンテンツを持つデータ部12a及び12bの区別に用いることができる。或いは、図10に示すように、2つのドット16の配置位置が異なるインジケーター認識部14c及び14dを、左右に隣り合い異なるコンテンツを持つデータ部12c及び12dの区別に用いることができる。
【0016】
このほか、本実施例に基づく設計では、インジケーター認識部14はコンテンツデータ部12の2つの隣り合うボーダー上に形成され、且つそのコンテンツデータ部12のドット16の分布範囲を定める。そのため光学デバイスを利用して影像を読み取った後、画像インジケーター10が変形等を起し実物と異なった時は、インジケーター認識部14を利用して校正を行い、コンテンツデータ部12中のドット排列を正確にキャプチャーする。
【0017】
下記の比較図で、本発明と周知の設計の長所を比較し説明する。
【0018】
図11は周知の設計の概略図を表示する。図12は本発明の設計の概略図を表示する。本発明の長所を説明する前にまず、有効情報の比率値を定義する:
E=(画像インジケーターのコンテンツ情報を表すドット数)/(全ドット数)。
【0019】
図11に示すように、周知の設計の5*5ドットマトリックス・ブロック中において、各情報ポイント206は全て4個のグリッド204で囲まれているため、画像インジケーターは破線で示す多くのグリッドペア22に分割することができる。各グリッドペア22は1つのグリッド204と1つの情報ポイント206を含み、そのため、周知の設計の有効情報比率値は50%となる。且つその値はドットマトリックス・ブロックの大きさの変化に左右されず固定常数である。もう一方、図12に示す同じ5*5のドットマトリックス・ブロックの本発明における設計の場合、2つのボーダーを占拠するインジケーター認識部のドットを控除すると、その有効情報比率値は(4*4)/(5*5)=64%となる。且つ本発明に基づく設計では、画像インジケーター10が大きくなるほど有効情報比率値がさらに高くなる。例をあげると、10*10のドットマトリックス・ブロックの場合、その有効情報比率値は(9*9)/(10*10)=81%となる。このことから、本発明の有効情報比率値は周知の設計より明らかに高く、且つ画像インジケーターが増大するにつれさらに高まることがわかる。言い換えると、本発明は比較的少ないドット数(比較的低いドット密度)を用いて同じ情報量を表示することができる。
【0020】
つまり画像インジケーターの設計で言うなら、画像マイクロユニットの寸法及び互いの間隔に基づき、画像マイクロユニットの数をできるだけ減らして、画像インジケーターの物体表面に対する全体の輝度の影響を減少させるべきである。前記したように、画像インジケーターは通常、物体表面のメイン情報と共存するため、ドットの密度が高くなるほど、視覚効果が悪くなるだけでなく、このように人の目は画像インジケーターの存在をより感知しやすくなり、画像インジケーターとメイン情報が混乱する機会が増す。そこで、本発明の有効情報比率値は周知の設計より明らかに高いため、比較的少ないドット数(比較的低いドット密度)を利用して同じ情報量を表示することができる。このようにして比較的よい視覚効果を提供し、且つ人の目が画像インジケーターの存在を比較的感知しにくいため、画像インジケーターとメイン情報が混乱しない。もう一方で、画像インジケーターが有限の物体表面エリアに形成される時、同じ情報量が提供されるという前提のもと、図11Aに示すようにドット分布密度が高すぎると、2つの隣り合うドット距離が小さくなりすぎ、明らかな視覚干渉をもたらしたり、印刷の困難度が容易に増加し、且つ光学デバイスの判読ミスをもたらしたり、区別しにくくなる。しかし、本発明の比較的低密度の設計はこの問題を引き起こさない。
【0021】
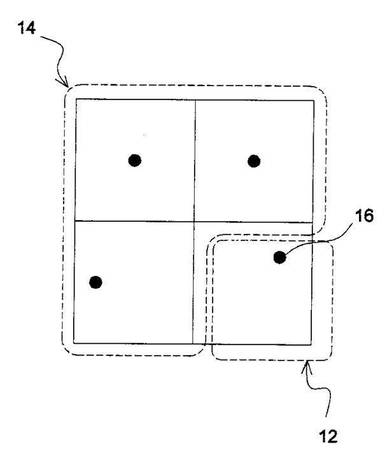
図13及び図14は本発明と周知の設計を比較した、もう1つの図である。図13に示すように、周知の設計は画像インジケーター中に少なくとも1つのキーポイント202を形成する必要があり、そのため、その周囲の4個のグリッド204で構成される4個の角型ブロック及び情報ポイント206を連同させ、少なくとも13個のドットで1つの画像インジケーターを構成しなければならない。しかし、図14に示すように、本発明に基づく設計では、わずか4個のドット16だけで1つの画像インジケーターを形成することができる。このため、本発明は比較的少ないドット数を用いて、1つの画像インジケーターを構成することができ、このように異なる物体の表面上への設置方式において、将来比較的弾性があり、且つ高すぎるドット分布密度が起こりにくい。
【0022】
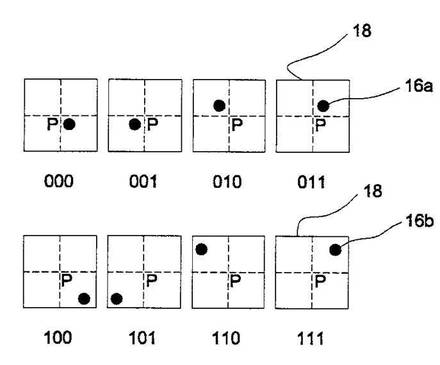
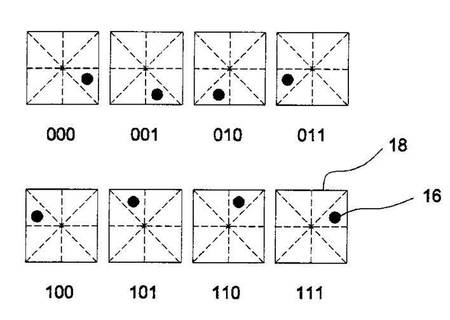
図15は本発明の画像インジケーター10の別設計例を表示する。コンテンツデータ部12の状態エリア18上のドット16における分布方式もまた限定されない。図15に示すように、状態エリア18を4個のサブエリアに分ける時、状態エリアの中心ポイントPからの距離の遠近に基づき、2組のドット分布方式に区分される。中心ポイントPからの距離が比較的近いドット16aが右下方、左下方、左上方或いは右上方のサブエリアに設置されると、それぞれ4個の異なるビット値000、001、010或いは011で表すことができる。中心ポイントPからの距離が比較的遠いドット16bが右下方、左下方、左上方或いは右上方のサブエリアに設置されると、それぞれ別の4個の異なるビット値100、101、110或いは111で表す。この設計により、ドット16の状態エリア18上の分布は8種の可能な状態組み合わせを発生させることができる。
【0023】
当然、本発明に基づく設計では、ドット16を複数個のサブエリア中の1つに置くだけで、異なるビット値で表示され、各状態エリア18が等分されたサブエリアの数量も限定されない。また図16に示すように、状態エリア18を八個のサブエリアに区分でき、それぞれのドット16を選択的にその中の1つのサブエリアに置くと、8種の可能な状態組み合わせが発生する。言い換えると、本発明ではそれぞれのドット16を置く状態エリアの位置は限定されず、状態エリア18が、幾つのサブエリアに区分されているかだけを見ればよい。
【0024】
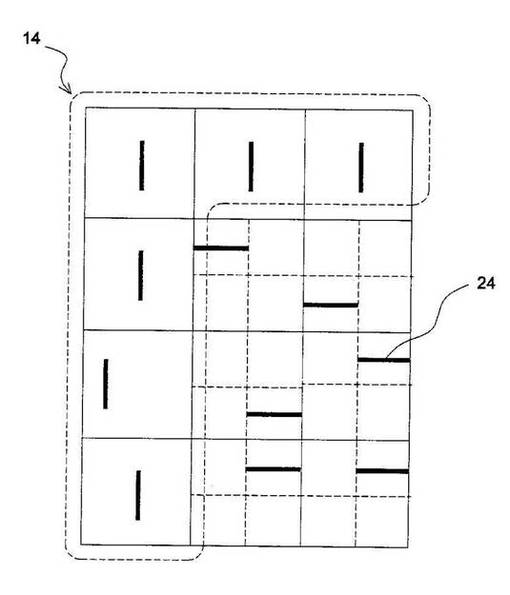
さらに、画像インジケーター10の画像マイクロユニットもまた、前記の各実施例で示したドット16に限定せず、例えばその他の外形のポイントでもよい。当然、異なる状態を識別するという目的が達成されるだけでよく、画像マイクロユニットはまた、ある特定の表示方式の使用に限定されない。例をあげると、図15に示すように、ショートライン・セグメント24を利用して表示することもできる。このほか、画像インジケーター10の画像マイクロユニット総数と排列もまた限定されず、且つ画像インジケーター10の状態エリアのマトリックスもまた縦横が等しいマトリックス排列の採用だけに限定しない。例えば図17に示すような縦横が違う角型マトリックスでもよい。
【0025】
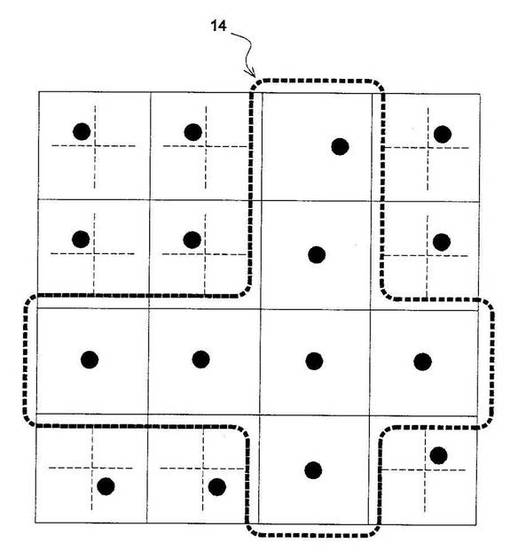
図18は、画像インジケーター10中のインジケーター認識部14を表示するもう1つの設計図である。インジケーター認識部14は画像インジケーター10のボーダー上への分布に限定されない。例えば、図17に示すように画像インジケーター10の中央部分に設置してもよく、画像インジケーター10の識別と位置決め効果さえ達成できればよい。
【符号の説明】
【0026】
10 画像インジケーター
12、12a、12b、12c、12d コンテンツデータ部
14、14a、14b、14c、14d インジケーター認識部
16、16'、16a、16b ドット
18 状態エリア
22 グリッドペア
24 ショートライン・セグメント
100 物体表面
102 画像インジケーター
104 メイン情報
110 電子システム
112 光学デバイス
114 プロセッサー
116 出力デバイス
202 キーポイント
204 グリッド
206 情報ポイント
【技術分野】
【0001】
本発明は画像識別(pattern/imagerecognition)を利用して読み取ることができる画像インジケーターに関するもので、当該画像インジケーターは物体表面上に形成され、且つインジケーターデータをマッピングする。
【背景技術】
【0002】
図1は物体表面100上に形成される画像インジケーター(graphical indicator) 102を表示するイメージ図である。図1に示すように、画像インジケーター102は多くの画像マイクロユニット(graphicalmicro−units)が組み合わされて成り、画像マイクロユニットは相当微小であるため、視覚上見過ごされやすい、或いは人の目に地色として解読される。画像インジケーター102とメイン情報(main information) 104 (例:図1の文字図案”APPLE”)は、例えば印刷等の方式を利用し、例えば紙等の物体表面100上に共同形成される。画像インジケーター102はインジケーターデータをマッピングし、且つ人の目のメイン情報104受信に影響しない。
【0003】
図2は電子システム110を表示する図である。その電子システム110は光学デバイス112、プロセッサー114及び出力デバイス116を有し、画像識別ステップによりその画像インジケーター102を読み取る。光学デバイス112、プロセッサー114、及び出力デバイス116は互いに有線或いは無線方式で接続されている。光学デバイス112は物体表面を読み取り、拡大影像を取得し、続いてプロセッサー114が拡大影像中から画像インジケーター102を取り出し、さらにデジタルデータに転換すると同時にそのデジタルデータに対応する付加情報を取得する。最後に、出力デバイス116がこの付加情報を受け取ると同時に、予め定められた形式でこの付加情報を出力する。こうして、画像インジケーター102の設計により、例えばブックページ等のよく見かける物体の表面上に、より多くの付加情報をロードすることができる。
【0004】
図3は、周知の多くの画像インジケーター102を含む図案設計を表示する図である。図3に示すように、1つの画像インジケーター102 (破線で囲んだエリア)は、1つのキーポイント202、複数のグリッド204、及び複数の情報ポイント206が予め定められた規則に従って排列して形成される。詳しく言うと、1つの画像インジケーター102はキーポイント202を中心とし、周囲に多くのグリッド204を配置する。その中で、4個のグリッド204毎に1つの角型ブロックを配置し、且つ4個のグリッド204毎に中心を1つのバーチャルポイントとする。角型ブロック内に位置する情報ポイント206は、選択的にそのバーチャルポイントの上、下、左、右方向へ一定距離偏移させることができ、それぞれ異なる数値で表し、さらに前記の電子システム110により読み出す。キーポイント202は1つの画像インジケーター102中心のグリッド204を予め定められた方向へ一定距離偏移させる方式で形成される。キーポイント202は画像インジケーター102の参考方向を提供することができ、光学デバイス112が物体表面を読み取り、拡大影像を取得する時の方向付けの参考とする。さらに、4個のグリッド204は1つの角型ブロック方式で配置され、画像インジケーター102を読み取り、印刷する時に変形が起こった場合、校正の参考とすることができる。
【0005】
図1に示すように、画像インジケーター102は通常、物体表面100上のメイン情報104と共存する。そのため、画像マイクロユニットの密度が高くなるほど、視覚効果が悪くなり、且つ人の目で画像インジケーター102の存在を感知しやすくなり、しかも画像インジケーター102とメイン情報104が混乱する機会が増加する。もう一方では、画像インジケーター102が有限の物体表面エリアに形成される時、同じ情報量が提供されるという前提のもと、画像マイクロユニットの分布密度が高すぎると、2つの隣り合う画像マイクロユニット間の距離が小さくなりすぎる。そのため画像マイクロユニットが、例えば印刷方式で紙上に形成される時、比較的はっきりした視覚干渉を起こす。この視覚干渉を減らしたい時は、通常、画像マイクロユニットの寸法をさらに縮小する必要があり、このようにしてプリンター及び紙の解析度の要求を高める。且つ印刷時にも印刷漏れしやすく、相対的に印刷の困難さが増し、また光学デバイスの判読ミスが起りやすく、区別が難しくなる。図3に示す周知の画像インジケーター102の設計方式は、画像マイクロユニットの密度が高くなりすぎることが明らかで、上記の種々の問題が発生する。
【発明の概要】
【発明が解決しようとする課題】
【0006】
このため、本発明の目的は比較的低い画像マイクロユニット密度を提供し、且つ少量の画像マイクロユニットで画像インジケーターを構成することで、上記周知の設計の種々問題を避けることができる、画像インジケーターの設計を提供することである。
【0007】
本発明に基づく設計では、画像インジケーターが物体の表面上に形成され、且つインジケーターデータをマッピングする。またその画像インジケーターはコンテンツデータ部(contentpart)及びインジケーター認識部(header part)を含む。コンテンツデータ部は複数個の画像マイクロユニット(micro−units)を含み、且つコンテンツデータ部が占有するエリアは複数の状態エリアに区分される。その中で各状態エリアには全て画像マイクロユニットが設置され、且つ画像マイクロユニットは選択的に前記状態エリアを等分して形成する複数のサブエリア中の1つに位置する。インジケーター認識部は複数個の画像マイクロユニットを含み、且つ画像マイクロユニットは予め定められた方式で排列され、その画像インジケーターを識別するヘッダー情報(headerinformation)を提供させる。インジケーター認識部はコンテンツデータ部のボーダー上に分布し、且つコンテンツデータ部の画像マイクロユニットの分布エリアを定めることができる。
【0008】
さらに、コンテンツデータ部の設計が9個の画像マイクロユニットを有し、且つ9個の状態エリアに区分され、さらに各状態エリアが4個のサブエリアに等分される時、画像マイクロユニットは選択的にその第1、第2、第3、或いは第4サブエリアに設置され、そのコンテンツデータ部に262144種の状態組み合わせを持たせることができる。その262144種の状態組み合わせ中から65536種の状態組み合わせを取り出し、ユニコード(Unicode)のコード構造中の1プレーン(plane)に属する65536個のコード位置に対応させることができる。
【0009】
本発明に基づく設計では、比較的少ないドット数(比較的低いドット密度)を用いて大量の情報量を提供することができ、こうすることで比較的良い視覚効果が提供できる。且つ人の目は比較的画像インジケーターの存在を感知しにくく、画像インジケーターと共存するメイン情報を混乱させない。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は、複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットのそれぞれは、第2の状態エリアの中心位置に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記第二画像マイクロユニットにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項2に記載の発明は、前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、線状を呈することを特徴とする請求項1に記載のデータ入出力方法である。
請求項3に記載の発明は、前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、ドット状を呈することを特徴とする請求項1に記載のデータ入出力方法である。
請求項4に記載の発明は、それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法である。
請求項5に記載の発明は、それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法である。
請求項6に記載の発明は、前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法である。
請求項7に記載の発明は、前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法である。
請求項8に記載の発明は、
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与えるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される前記参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項9に記載の発明は、前記インジケーター認識部の一部は、前記第二画像マイクロユニットの第1の分布を有し、前記インジケーター認識部の他の部分は、第二画像マイクロユニットの第2の分布を有することを特徴とする請求項8に記載のデータ入出力方法である。
請求項10に記載の発明は、前記第1の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN1であり、前記第2の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN2であり、N1はN2と異なることを特徴とする請求項9に記載のデータ入出力方法である。
請求項11に記載の発明は、前記第1の分布を有する前記インジケーター認識部において、第二画像マイクロユニットの少なくとも1つは、第1の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第2の分布を有する前記インジケーター認識部において、前記第二画像マイクロユニットの少なくとも1つは、第2の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第1の方向は前記第2の方向と異なることを特徴とする請求項9に記載のデータ入出力方法である。
請求項12に記載の発明は、前記第1の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第1の相対位置が与えられ、前記第2の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第2の相対位置が与えられ、前記第1の相対位置は前記第2の相対位置と異なることを特徴とする請求項9に記載のデータ入出力方法である。
請求項13に記載の発明は、前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、線状を呈することを特徴とする請求項8に記載のデータ入出力方法である。
請求項14に記載の発明は、前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、ドット状を呈することを特徴とする請求項8に記載のデータ入出力方法である。
請求項15に記載の発明は、それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法である。
請求項16に記載の発明は、それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法である。
請求項17に記載の発明は、前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項8に記載のデータ入出力方法である。
請求項18に記載の発明は、
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心に配置され、前記インジケーター認識部は、前記第二画像マイクロユニットの複数の候補分布から選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部により提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項19に記載の発明は、
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与え、前記インジケーター認識部は前記第二画像マイクロユニットの複数の候補分布の少なくとも2つから選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項20に記載の発明は、
それぞれコンテンツデータ部とインジケーター認識部とを含む物体の矩形領域に配列された複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一に配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記矩形領域は前記第1の状態エリアおよび前記第2の状態エリアにより構成され、該矩形領域は互いに連結された2つの第1のエッジおよび互いに連結された2つの第2のエッジを有し、前記第1の状態エリアの一部は前記第1のエッジに沿って連続的に配置される一方、前記第1の状態エリアの一部と前記第2の状態エリアの一部とは前記第2のエッジに沿って交互に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記第二画像マイクロユニットにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法である。
請求項21に記載の発明は、前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法である。
請求項22に記載の発明は、前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法である。
【発明の効果】
【0011】
本発明は比較的低い画像マイクロユニット密度を提供し、且つ少量の画像マイクロユニットで画像インジケーターを構成することで、上記の周知の設計の種々の問題を避けることができる、画像インジケーターの設計を提供することである。
【図面の簡単な説明】
【0012】
【図1】物体の表面上に形成される画像インジケーターを表示する図である。
【図2】画像インジケーターを読み取る電子システムを表示する図である。
【図3】周知の多くの画像インジケーターを含む図案設計を表示する図である。
【図4】本発明に基づく実施例で設計した、多くの画像インジケーターが排列し形成する図案を表示である。
【図5】図4中の画像インジケーターの拡大図である。
【図6】画像マイクロユニットの状態エリア中の設置方式を表示する図である。
【図7】図5の画像インジケーターに対応するビット配列図である。
【図8】同じ画像インジケーターにそれぞれ対応する、同じインジケーター認識部の設計を表示する図である。
【図9】2つの隣り合い異なる画像インジケーターにそれぞれ対応する、相異なるインジケーター認識部の設計を表示する図である。
【図10】2つの隣り合い異なる画像インジケーターにそれぞれ対応する、相異なるインジケーター認識部の設計を表示する図である。
【図11】本発明と周知の設計を比較する概略図である。
【図12】本発明と周知の設計を比較する概略図である。
【図13】本発明と周知の設計を比較するもう1つの概略図である。
【図14】本発明と周知の設計を比較するもう1つの概略図である。
【図15】本発明の画像インジケーターのもう1つの実施例を表す図である。
【図16】本発明の画像インジケーターのもう1つの実施例を表す図である。
【図17】本発明の画像インジケーターのもう1つの実施例を表す図である。
【図18】本発明の画像インジケーターのもう1つの実施例を表す図である。
【発明を実施するための形態】
【0013】
図4は本発明に基づく実施例で設計された、多くの画像インジケーター10が排列し形成する図案を表示し、図5はその中の画像インジケーター10の拡大図で、はっきりと本発明の設計を説明するものである。図5に示すように、画像インジケーター10はコンテンツデータ部(content part) 12及びインジケーター認識部(header part) 14を含む。本実施例によると、コンテンツデータ部12は9個のドット16で構成される9個の画像マイクロユニットを含み、且つそのコンテンツデータ部12の占有エリアは9個の状態エリア18に区分され、3*3の平面2次元配列の状態エリアを構成する。各状態エリア18は全て1つのドット16を含む。本実施例に基づく設計では、1つのドット16が状態エリア18中の異なる配列位置に置かれると、マッピングしたインジケーターデータ中の個別の数値で表すことを利用することができる。詳しく言うと、図6に示すように、1つの状態エリア18は4個のサブエリアに等分することができ、ドット16は選択的に右下方、左下方、左上方或いは右上方のサブエリアに設置でき、それぞれ4個の異なるビット値00、01、10或いは11で表すことができる。こうして、図5のコンテンツデータ部12が示すドット16の配置関係は、図7に示すビット配列に対応させることができる。コンテンツデータ部12が9個のドット16を有し、且つそれぞれ9個の状態エリア中に置く時、各状態エリア18が4個のサブエリアに等分されているため、各ドット16を選択的に4個のサブエリア中の1つに設置する場合、そのコンテンツデータ部12に49 (=262144)種の状態の組み合わせを持たせることができる。そこで、図5に示す画像インジケーター10の設計を利用すると、マッピングするインジケーターデータ中の262144個の異なる数値を表示することができる。そのため、本実施例によるコンテンツデータ部12の設計は、その262144種の状態組み合わせ中から、65536種の状態組み合わせを取り出し、ユニコード(Unicode)のコード構造中の1つのプレーン(plane)に属する65536個のコード位置に対応させ、その残りの状態組み合わせは、その他の用途のために保留することができる。例をあげると、チェックサムコード(checksum code)に対応させるコード位置として状態組み合わせを提供することができる。
【0014】
もう一方では、画像インジケーター10が1グループの画像マイクロユニットから構成されているため、インジケーター認識部14を設置して2つの隣り合う画像インジケーター10を区分する必要がある。図8に示すように、4個の画像インジケーター10は全て同じコンテンツデータ部12を持ち、また同じインジケーターデータ内容を有する。そのため、4個の画像インジケーター10には全て同じ特定のインジケーター認識部14を設置し、こうすることで、その特定のインジケーター認識部14を探し出すだけで、同じ画像インジケーター10が探し出せ、近隣の他の画像インジケーター10における干渉を受けない。インジケーター認識部14は同様に例えばドット16から構成される多くの画像マイクロユニットを含み、且つそのインジケーター認識部14の占有エリアが多くの状態エリア18に区分されている。さらに図5を参照する。本実施例に基づく設計では、インジケーター認識部14の各状態エリア18は全て状態エリア18の中心位置に設置される1つのドットを含み、そのためインジケーター認識部14は7個のドットを持つ。且つ2つの隣り合うボーダー上を9個のドットを有するコンテンツデータ部12で囲み、インジケーター認識部14をL型分布に形成させ、且つ画像インジケーター10全体を16個のドットで構成される4*4マトリックス排列とする。図5に示すように、インジケーター認識部14のドットの配列位置は全て状態エリアの中心位置に予設され、画像インジケーターがインジケーター認識部14を識別する過程をさらに速くさせることができる。但し、インジケーター認識部14中の1つのドット16'の位置は特定方向に偏移させ、その他のドット16の位置と変える必要がある。そのため画像識別(pattern/image recognition)を行い、その画像インジケーター10を読み取る時、光学デバイス(図の表示なし)が物体表面を読み取り拡大影像を取得した後、まず画像インジケーター10のインジケーター認識部14を識別するだけで、その画像インジケーター10に対する方向付けができ、コンテンツデータ部12の状態組み合わせを正確にキャプチャーすることができる。
【0015】
さらに、インジケーター認識部14中のドット16の配置位置を変更することで、互いに異なるインジケーター認識部14を発生させることができる。このため、各画像インジケーター10がコンテンツデータ部12の状態組み合わせを調整し、異なる数値をマッピングすると、2つの異なる数値の画像インジケーター10をそれぞれマッピングして、相異なるインジケーター認識部14によって両者を区別することができる。図9に示すように、2つのドット16の配置位置が異なる相異なるインジケーター認識部14a及び14bを、上下に隣り合い異なるコンテンツを持つデータ部12a及び12bの区別に用いることができる。或いは、図10に示すように、2つのドット16の配置位置が異なるインジケーター認識部14c及び14dを、左右に隣り合い異なるコンテンツを持つデータ部12c及び12dの区別に用いることができる。
【0016】
このほか、本実施例に基づく設計では、インジケーター認識部14はコンテンツデータ部12の2つの隣り合うボーダー上に形成され、且つそのコンテンツデータ部12のドット16の分布範囲を定める。そのため光学デバイスを利用して影像を読み取った後、画像インジケーター10が変形等を起し実物と異なった時は、インジケーター認識部14を利用して校正を行い、コンテンツデータ部12中のドット排列を正確にキャプチャーする。
【0017】
下記の比較図で、本発明と周知の設計の長所を比較し説明する。
【0018】
図11は周知の設計の概略図を表示する。図12は本発明の設計の概略図を表示する。本発明の長所を説明する前にまず、有効情報の比率値を定義する:
E=(画像インジケーターのコンテンツ情報を表すドット数)/(全ドット数)。
【0019】
図11に示すように、周知の設計の5*5ドットマトリックス・ブロック中において、各情報ポイント206は全て4個のグリッド204で囲まれているため、画像インジケーターは破線で示す多くのグリッドペア22に分割することができる。各グリッドペア22は1つのグリッド204と1つの情報ポイント206を含み、そのため、周知の設計の有効情報比率値は50%となる。且つその値はドットマトリックス・ブロックの大きさの変化に左右されず固定常数である。もう一方、図12に示す同じ5*5のドットマトリックス・ブロックの本発明における設計の場合、2つのボーダーを占拠するインジケーター認識部のドットを控除すると、その有効情報比率値は(4*4)/(5*5)=64%となる。且つ本発明に基づく設計では、画像インジケーター10が大きくなるほど有効情報比率値がさらに高くなる。例をあげると、10*10のドットマトリックス・ブロックの場合、その有効情報比率値は(9*9)/(10*10)=81%となる。このことから、本発明の有効情報比率値は周知の設計より明らかに高く、且つ画像インジケーターが増大するにつれさらに高まることがわかる。言い換えると、本発明は比較的少ないドット数(比較的低いドット密度)を用いて同じ情報量を表示することができる。
【0020】
つまり画像インジケーターの設計で言うなら、画像マイクロユニットの寸法及び互いの間隔に基づき、画像マイクロユニットの数をできるだけ減らして、画像インジケーターの物体表面に対する全体の輝度の影響を減少させるべきである。前記したように、画像インジケーターは通常、物体表面のメイン情報と共存するため、ドットの密度が高くなるほど、視覚効果が悪くなるだけでなく、このように人の目は画像インジケーターの存在をより感知しやすくなり、画像インジケーターとメイン情報が混乱する機会が増す。そこで、本発明の有効情報比率値は周知の設計より明らかに高いため、比較的少ないドット数(比較的低いドット密度)を利用して同じ情報量を表示することができる。このようにして比較的よい視覚効果を提供し、且つ人の目が画像インジケーターの存在を比較的感知しにくいため、画像インジケーターとメイン情報が混乱しない。もう一方で、画像インジケーターが有限の物体表面エリアに形成される時、同じ情報量が提供されるという前提のもと、図11Aに示すようにドット分布密度が高すぎると、2つの隣り合うドット距離が小さくなりすぎ、明らかな視覚干渉をもたらしたり、印刷の困難度が容易に増加し、且つ光学デバイスの判読ミスをもたらしたり、区別しにくくなる。しかし、本発明の比較的低密度の設計はこの問題を引き起こさない。
【0021】
図13及び図14は本発明と周知の設計を比較した、もう1つの図である。図13に示すように、周知の設計は画像インジケーター中に少なくとも1つのキーポイント202を形成する必要があり、そのため、その周囲の4個のグリッド204で構成される4個の角型ブロック及び情報ポイント206を連同させ、少なくとも13個のドットで1つの画像インジケーターを構成しなければならない。しかし、図14に示すように、本発明に基づく設計では、わずか4個のドット16だけで1つの画像インジケーターを形成することができる。このため、本発明は比較的少ないドット数を用いて、1つの画像インジケーターを構成することができ、このように異なる物体の表面上への設置方式において、将来比較的弾性があり、且つ高すぎるドット分布密度が起こりにくい。
【0022】
図15は本発明の画像インジケーター10の別設計例を表示する。コンテンツデータ部12の状態エリア18上のドット16における分布方式もまた限定されない。図15に示すように、状態エリア18を4個のサブエリアに分ける時、状態エリアの中心ポイントPからの距離の遠近に基づき、2組のドット分布方式に区分される。中心ポイントPからの距離が比較的近いドット16aが右下方、左下方、左上方或いは右上方のサブエリアに設置されると、それぞれ4個の異なるビット値000、001、010或いは011で表すことができる。中心ポイントPからの距離が比較的遠いドット16bが右下方、左下方、左上方或いは右上方のサブエリアに設置されると、それぞれ別の4個の異なるビット値100、101、110或いは111で表す。この設計により、ドット16の状態エリア18上の分布は8種の可能な状態組み合わせを発生させることができる。
【0023】
当然、本発明に基づく設計では、ドット16を複数個のサブエリア中の1つに置くだけで、異なるビット値で表示され、各状態エリア18が等分されたサブエリアの数量も限定されない。また図16に示すように、状態エリア18を八個のサブエリアに区分でき、それぞれのドット16を選択的にその中の1つのサブエリアに置くと、8種の可能な状態組み合わせが発生する。言い換えると、本発明ではそれぞれのドット16を置く状態エリアの位置は限定されず、状態エリア18が、幾つのサブエリアに区分されているかだけを見ればよい。
【0024】
さらに、画像インジケーター10の画像マイクロユニットもまた、前記の各実施例で示したドット16に限定せず、例えばその他の外形のポイントでもよい。当然、異なる状態を識別するという目的が達成されるだけでよく、画像マイクロユニットはまた、ある特定の表示方式の使用に限定されない。例をあげると、図15に示すように、ショートライン・セグメント24を利用して表示することもできる。このほか、画像インジケーター10の画像マイクロユニット総数と排列もまた限定されず、且つ画像インジケーター10の状態エリアのマトリックスもまた縦横が等しいマトリックス排列の採用だけに限定しない。例えば図17に示すような縦横が違う角型マトリックスでもよい。
【0025】
図18は、画像インジケーター10中のインジケーター認識部14を表示するもう1つの設計図である。インジケーター認識部14は画像インジケーター10のボーダー上への分布に限定されない。例えば、図17に示すように画像インジケーター10の中央部分に設置してもよく、画像インジケーター10の識別と位置決め効果さえ達成できればよい。
【符号の説明】
【0026】
10 画像インジケーター
12、12a、12b、12c、12d コンテンツデータ部
14、14a、14b、14c、14d インジケーター認識部
16、16'、16a、16b ドット
18 状態エリア
22 グリッドペア
24 ショートライン・セグメント
100 物体表面
102 画像インジケーター
104 メイン情報
110 電子システム
112 光学デバイス
114 プロセッサー
116 出力デバイス
202 キーポイント
204 グリッド
206 情報ポイント
【特許請求の範囲】
【請求項1】
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は、複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットのそれぞれは、第2の状態エリアの中心位置に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記第二画像マイクロユニットにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項2】
前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、線状を呈することを特徴とする請求項1に記載のデータ入出力方法。
【請求項3】
前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、ドット状を呈することを特徴とする請求項1に記載のデータ入出力方法。
【請求項4】
それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法。
【請求項5】
それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法。
【請求項6】
前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法。
【請求項7】
前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法。
【請求項8】
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与えるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される前記参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項9】
前記インジケーター認識部の一部は、前記第二画像マイクロユニットの第1の分布を有し、前記インジケーター認識部の他の部分は、第二画像マイクロユニットの第2の分布を有することを特徴とする請求項8に記載のデータ入出力方法。
【請求項10】
前記第1の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN1であり、前記第2の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN2であり、N1はN2と異なることを特徴とする請求項9に記載のデータ入出力方法。
【請求項11】
前記第1の分布を有する前記インジケーター認識部において、第二画像マイクロユニットの少なくとも1つは、第1の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第2の分布を有する前記インジケーター認識部において、前記第二画像マイクロユニットの少なくとも1つは、第2の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第1の方向は前記第2の方向と異なることを特徴とする請求項9に記載のデータ入出力方法。
【請求項12】
前記第1の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第1の相対位置が与えられ、前記第2の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第2の相対位置が与えられ、前記第1の相対位置は前記第2の相対位置と異なることを特徴とする請求項9に記載のデータ入出力方法。
【請求項13】
前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、線状を呈することを特徴とする請求項8に記載のデータ入出力方法。
【請求項14】
前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、ドット状を呈することを特徴とする請求項8に記載のデータ入出力方法。
【請求項15】
それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法。
【請求項16】
それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法。
【請求項17】
前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項8に記載のデータ入出力方法。
【請求項18】
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心に配置され、前記インジケーター認識部は、前記第二画像マイクロユニットの複数の候補分布から選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部により提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項19】
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与え、前記インジケーター認識部は前記第二画像マイクロユニットの複数の候補分布の少なくとも2つから選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項20】
それぞれコンテンツデータ部とインジケーター認識部とを含む物体の矩形領域に配列された複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記矩形領域は前記第1の状態エリアおよび前記第2の状態エリアにより構成され、該矩形領域は互いに連結された2つの第1のエッジおよび互いに連結された2つの第2のエッジを有し、前記第1の状態エリアの一部は前記第1のエッジに沿って連続的に配置される一方、前記第1の状態エリアの一部と前記第2の状態エリアの一部とは前記第2のエッジに沿って交互に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項21】
前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法。
【請求項22】
前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法。
【請求項1】
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は、複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットのそれぞれは、第2の状態エリアの中心位置に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記第二画像マイクロユニットにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項2】
前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、線状を呈することを特徴とする請求項1に記載のデータ入出力方法。
【請求項3】
前記第一画像マイクロユニットおよび前記第二画像マイクロユニットは、ドット状を呈することを特徴とする請求項1に記載のデータ入出力方法。
【請求項4】
それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法。
【請求項5】
それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項1に記載のデータ入出力方法。
【請求項6】
前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法。
【請求項7】
前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項1に記載のデータ入出力方法。
【請求項8】
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与えるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される前記参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項9】
前記インジケーター認識部の一部は、前記第二画像マイクロユニットの第1の分布を有し、前記インジケーター認識部の他の部分は、第二画像マイクロユニットの第2の分布を有することを特徴とする請求項8に記載のデータ入出力方法。
【請求項10】
前記第1の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN1であり、前記第2の分布を有する前記インジケーター認識部において、前記第2の状態エリアの一つの中心から偏位した前記第二画像マイクロユニットの数はN2であり、N1はN2と異なることを特徴とする請求項9に記載のデータ入出力方法。
【請求項11】
前記第1の分布を有する前記インジケーター認識部において、第二画像マイクロユニットの少なくとも1つは、第1の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第2の分布を有する前記インジケーター認識部において、前記第二画像マイクロユニットの少なくとも1つは、第2の方向に沿って前記第2の状態エリアの一つの中心から偏位し、前記第1の方向は前記第2の方向と異なることを特徴とする請求項9に記載のデータ入出力方法。
【請求項12】
前記第1の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第1の相対位置が与えられ、前記第2の分布を有する前記インジケーター認識部において、第2の状態エリアの前記中心に配置された前記他の前記第二画像マイクロユニットと前記第2の状態エリアの一つの中心から偏位した第二画像マイクロユニットの前記少なくとも一つとの第2の相対位置が与えられ、前記第1の相対位置は前記第2の相対位置と異なることを特徴とする請求項9に記載のデータ入出力方法。
【請求項13】
前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、線状を呈することを特徴とする請求項8に記載のデータ入出力方法。
【請求項14】
前記第一画像マイクロユニットと前記第二画像マイクロユニットとは、ドット状を呈することを特徴とする請求項8に記載のデータ入出力方法。
【請求項15】
それぞれの前記第1の状態エリアは、4個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記4個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法。
【請求項16】
それぞれの前記第1の状態エリアは、8個の仮想的サブエリアに等分され、前記それぞれの前記第一画像マイクロユニットは、前記8個の仮想的サブエリアのうち1個に選択的に配置されることを特徴とする請求項8に記載のデータ入出力方法。
【請求項17】
前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項8に記載のデータ入出力方法。
【請求項18】
コンテンツデータ部とインジケーター認識部とを含む画像インジケーターを形成するステップであって、前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心に配置され、前記インジケーター認識部は、前記第二画像マイクロユニットの複数の候補分布から選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部により提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項19】
それぞれコンテンツデータ部とインジケーター認識部とを含む複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記インジケーター認識部は少なくとも2つの前記第二画像マイクロユニットの分布を有し、前記インジケーター認識部の前記第二画像マイクロユニットの異なる分布は、それぞれ異なる参考方向を与え、前記インジケーター認識部は前記第二画像マイクロユニットの複数の候補分布の少なくとも2つから選択され、それぞれの前記第二画像マイクロユニットの前記候補分布は、それぞれ一つの参照方向を示すステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項20】
それぞれコンテンツデータ部とインジケーター認識部とを含む物体の矩形領域に配列された複数の画像インジケーターを形成するステップであって、それぞれの前記コンテンツデータ部は複数の第1の状態エリアに等分され、複数の第一画像マイクロユニットを含み、それぞれの前記第1の状態エリアは、複数の仮想的サブエリアに等分され、それぞれの前記第一画像マイクロユニットは、前記仮想的サブエリアのうち一つに配置され、前記第一画像マイクロユニットが異なる仮想的サブエリアに配置されたとき複数の異なる候補状態が提供され、それぞれの前記第1の状態エリアは、他の第1の状態エリアの少なくとも1つに隣接し、それぞれの前記インジケーター認識部は、複数の第2の状態エリアに等分され、複数の第二画像マイクロユニットを含み、それぞれの前記第2の状態エリアは、他の前記第2の状態エリアの少なくとも2つに隣接し、前記第1の状態エリアと前記第2の状態エリアとは、状態エリアの配列を構成し、少なくとも第二画像マイクロユニットの一つは、前記第2の状態エリアの一つの中心から偏位し、その他の前記第二画像マイクロユニットは、第2の状態エリアの中心位置に配置され、前記矩形領域は前記第1の状態エリアおよび前記第2の状態エリアにより構成され、該矩形領域は互いに連結された2つの第1のエッジおよび互いに連結された2つの第2のエッジを有し、前記第1の状態エリアの一部は前記第1のエッジに沿って連続的に配置される一方、前記第1の状態エリアの一部と前記第2の状態エリアの一部とは前記第2のエッジに沿って交互に配置されるステップと、
前記画像インジケーターを光学デバイスにより読み取り、前記第一画像マイクロユニットにより提供される前記候補状態を識別し、前記インジケーター認識部の一つにより提供される参考方向を特定するステップと
を含む物体上の画像インジケーターを使用するデータ入出力方法。
【請求項21】
前記第1の状態エリアは、互いに重ならず、前記第2の状態エリアは、互いに重ならず、前記第1の状態エリアは、前記第2の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法。
【請求項22】
前記第2の状態エリアと前記第1の状態エリアの一部は隣接し、前記第2の状態エリアは、前記第1の状態エリアと重ならないことを特徴とする請求項20に記載のデータ入出力方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−16060(P2012−16060A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2011−218281(P2011−218281)
【出願日】平成23年9月30日(2011.9.30)
【分割の表示】特願2009−106931(P2009−106931)の分割
【原出願日】平成18年7月27日(2006.7.27)
【出願人】(502343182)松翰科技股▲ふん▼有限公司 (5)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【分割の表示】特願2009−106931(P2009−106931)の分割
【原出願日】平成18年7月27日(2006.7.27)
【出願人】(502343182)松翰科技股▲ふん▼有限公司 (5)
【Fターム(参考)】
[ Back to top ]