
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、シミュレーションの実行時に表示される表示用テクスチャのテクスチャデータ22と、部品を識別するデータである部品識別データ23と、を備えている。テクスチャデータ22は、部品の外面に対して描かれる画像のデータとして指定され、部品識別データ23は、部品の内面に対して描かれるQRコード画像のデータとして指定されている。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、シミュレーションの実行時に表示される表示用テクスチャのテクスチャデータ22と、部品を識別するデータである部品識別データ23と、を備えている。テクスチャデータ22は、部品の外面に対して描かれる画像のデータとして指定され、部品識別データ23は、部品の内面に対して描かれるQRコード画像のデータとして指定されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生産ラインのシミュレーションに用いられるデータ、そのデータを使用するコンピュータプログラム及びデータ取得装置に関する。
【背景技術】
【0002】
CAD(Computer Aided Design)データなどの3次元画像データを用いてシミュレーションを行う場合、3次元画像データは形状や、表面の色彩、模様に関するデータのみを有する。このため、3次元画像で表示されるシミュレーション対象を識別するためには、3次元画像データとは別に識別データが必要となる。
【0003】
そこで、3次元画像データのファイルとは異なる補助ファイルに識別データを保存し、その識別データをシミュレーションに用いる方法がある。
【0004】
また、画像データを含むデータにおいて、ヘッダー領域などの未定義領域に識別データを格納する方法がある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002―300372
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、補助ファイルを用いる方法では、ファイルの管理が煩雑となる。
【0007】
また、データの未定義領域に識別データを格納する方法では、未定義領域に識別データを格納することのできる特別なソフトウェアを用いる必要がある。さらに、画像データのファイル形式(データ形式)を変換すると、その変換に伴って識別データが欠損するおそれがある。
【0008】
本発明は、こうした実情に鑑みてなされたものであり、その主たる目的は、一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制することにある。
【課題を解決するための手段】
【0009】
本発明は、上記課題を解決するために、以下の手段を採用した。
【0010】
第1の手段は、生産ラインのシミュレーションに用いられるデータの構造であって、シミュレーション対象の3次元画像を特定する3次元画像データと、前記シミュレーションの実行時に表示される表示用テクスチャのデータと、前記シミュレーション対象を識別するデータである識別データと、を備え、前記表示用テクスチャのデータは、前記3次元画像の外面に対して描かれる画像のデータとして指定され、前記識別データは、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されていることを特徴とする。
【0011】
上記データ構造を有するデータは、生産ラインのシミュレーションに用いられる。そして、このデータ構造は、シミュレーション対象の3次元画像を特定する3次元画像データを備えているため、生産ラインのシミュレーション実行時に、シミュレーション対象の3次元画像が表示される。その際、表示用テクスチャが、3次元画像の外面に対して描かれ、シミュレーション対象の外観検査等に用いられる。
【0012】
ここで、上記データ構造は、シミュレーション対象を識別するデータである識別データを備えており、この識別データは3次元画像に対して描かれる2次元画像のデータとして指定されている。このため、一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、シミュレーションに用いられるデータの一部である2次元画像のデータとして、3次元画像データに識別データを付与することができる。さらに、シミュレーションに用いられるデータのうち識別データに対応する2次元画像のデータを特定し、その2次元画像を解析することにより、シミュレーション対象を識別する識別データを取得することができる。このため、データの形式が変換された場合に、識別データに対応する2次元画像が劣化するおそれはあるものの、2次元画像に基づいて取得される識別データが欠損することを抑制することができる。
【0013】
さらに、識別データは、3次元画像の内面に対して描かれる2次元画像のデータとして指定されている。このため、シミュレーションの実行時に、識別データに対応する2次元画像は3次元画像の内面に描かれ、外観上表示されることが抑制される。したがって、識別データを有する3次元画像データを用いて、識別データを有しない3次元画像データと同様にシミュレーションを行うことができる。
【0014】
第2の手段では、前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像における同一の面に対して描かれる画像のデータとして指定されている。
【0015】
上記構成によれば、シミュレーションの実行時に、識別データに対応する2次元画像と表示用テクスチャとは、3次元画像における同一の面に対して、それぞれ内面と外面とに描かれる。このため、識別データに対応する2次元画像が表示用テクスチャにより覆われ、外観上表示されることが抑制される。さらに、シミュレーション対象の3次元画像に新たな面を設ける必要がなく、表示用テクスチャと同様にして、元々の3次元画像に対して識別データに対応する2次元画像を描くことができる。
【0016】
具体的には、第3の手段のように、前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像に対して画像を描く向きを示す法線ベクトルが互いに逆向きに指定されているといった構成を採用することができる。
【0017】
第4の手段では、前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を所定方向から撮影した場合に表示される画像のデータとして指定されている。
【0018】
上記構成によれば、シミュレーションの実行時に、3次元画像の内面を所定方向から撮影することにより、識別データに対応する2次元画像が表示される。このため、画像データを解析するのではなく、作業者が3次元画像を見ながら識別データに対応する2次元画像を探す場合に、識別データに対応する2次元画像を容易に探すことができる。
【0019】
第5の手段では、前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を撮影した場合に、前記識別データに対応する前記2次元画像の描かれる位置と撮影位置との距離が所定距離よりも長くなる内面に描かれる画像のデータとして指定されている。
【0020】
上記構成によれば、シミュレーションの実行時に、3次元画像の内面を撮影した場合に、識別データに対応する2次元画像の描かれた内面と撮影位置との距離が所定距離よりも長くなる。このため、識別データに対応する2次元画像と撮影位置との距離を確保することができ、識別データに対応する2次元画像を適切に表示することができる。したがって、画像データを解析するのではなく、作業者が3次元画像を見ながら識別データに対応する2次元画像を探す場合に、識別データに対応する2次元画像を容易に探すことができる。
【0021】
第6の手段では、前記識別データに対応する前記2次元画像のデータは、無色で描かれる画像のデータとして指定されている。
【0022】
上記構成によれば、シミュレーションの実行時に、識別データに対応する2次元画像のデータは無色で描かれるため、シミュレーションに影響を与えることを防止することができる。その結果、識別データを有する3次元画像データを用いて、識別データを有しない3次元画像データと同様にシミュレーションを行うことができる。
【0023】
第7の手段では、前記識別データに対応する前記2次元画像は、前記識別データを図形コードに変換した2次元画像である。
【0024】
上記構成によれば、識別データに対応する2次元画像は、識別データを図形コードに変換した2次元画像であるため、データ形式の変換に伴って図形コードの画像が劣化したとしても、図形コードに基づいて取得される識別データの劣化を抑制することができる。すなわち、実物に印刷された図形コードが若干不明瞭であったとしても、図形コードから読み取られるデータは劣化しない。これと同様にして、3次元画像に対して描かれた図形コードが若干不明瞭であったとしても、図形コードから読み取られる識別データは劣化しない。したがって、識別データが劣化することを抑制することができる。なお、図形コードとして、バーコードや、2次元コードを採用することができる。
【0025】
第8の手段では、前記図形コードは、誤り訂正機能を有する図形コードである。
【0026】
上記構成によれば、図形コードは、誤り訂正機能を有する図形コードであるため、データ形式の変換に伴って図形コードの画像が劣化し、図形コードから読み取られる識別データの一部に誤りが生じたとしても、識別データの誤りを訂正することができる。すなわち、実物に印刷された図形コードの一部が汚れ等により欠損したとしても、誤り訂正機能により読み取りデータの誤りを訂正することができる。これと同様にして、3次元画像に対して描かれた図形コードの一部がデータ形式の変換に伴って欠損したとしても、誤り訂正機能により識別データの誤りを訂正することができる。
【0027】
要するに、実物に印刷された図形コードが汚れ等に強いという特性を持つのと同様に、3次元画像に対して描かれた図形コードはデータ形式の変換に強いという特性を持つ。したがって、識別データの劣化をより効果的に抑制することができる。なお、誤り訂正機能を有する図形コードとして、QRコード(登録商標)や、データマトリクスコードを採用することができる。
【0028】
第9の手段は、第1〜第8のいずれかの手段のデータ構造から識別データを取得するコンピュータプログラムであって、前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する機能と、前記検索されたデータを解析して前記識別データを取得する機能と、をコンピュータに実現させることを特徴とする。
【0029】
第1〜第8のいずれかの手段のデータ構造では、識別データは、3次元画像の内面に対して描かれる2次元画像のデータとして指定されている。
【0030】
ここで、第9の手段の上記構成によれば、上記データ構造から、3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータが検索される。このため、シミュレーションに用いられるデータの中から、識別データに対応する2次元画像のデータを検索することができる。したがって、検索されたデータを解析することにより、シミュレーション対象を識別する識別データを取得することができる。
【0031】
第10の手段では、第7又は第8の手段のデータ構造から識別データを取得するコンピュータプログラムであって、前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する機能と、前記特定された図形コードを復号して前記識別データを取得する機能と、をコンピュータに実現させることを特徴とする。
【0032】
第7又は第8の手段のデータ構造では、識別データに対応する2次元画像は、識別データを図形コードに変換した2次元画像である。
【0033】
ここで、第10の手段の上記構成によれば、上記データ構造のうち、3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータが解析され、図形コードが特定される。すなわち、3次元画像の内面に対して描かれる2次元画像のデータから、識別データを図形コードに変換した2次元画像のデータが特定される。そして、特定された図形コードを復号することにより、シミュレーション対象を識別する識別データを取得することができる。
【0034】
第11の手段は、第1〜第8のいずれかの手段のデータ構造から識別データを取得するデータ取得装置であって、前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する検索部と、前記検索されたデータを解析して前記識別データを取得する取得部と、を備えることを特徴とする。
【0035】
上記構成によれば、データ取得装置において、第9の手段のコンピュータプログラムと同様の作用効果を奏することができる。
【0036】
第12の手段は、第7又は第8の手段のデータ構造から識別データを取得するデータ取得装置であって、前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する特定部と、前記特定された図形コードを復号して前記識別データを取得する取得部と、を備えることを特徴とする。
【0037】
上記構成によれば、データ取得装置において、第10の手段のコンピュータプログラムと同様の作用効果を奏することができる。
【図面の簡単な説明】
【0038】
【図1】生産ラインのシミュレーション態様を示す図。
【図2】シミュレーション装置及びデータ構造の概要を示す図。
【図3】第1実施形態に係る部品データの構造の概要を示す図。
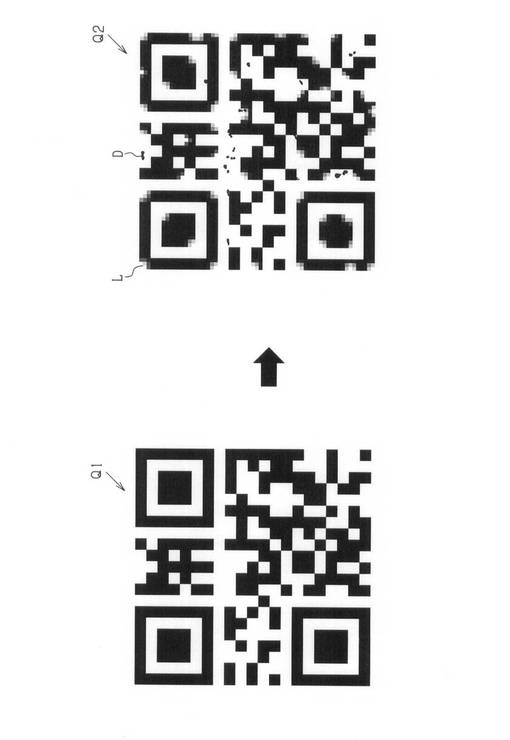
【図4】QRコードの2次元画像が劣化した状態を示す図。
【図5】QRコードの2次元画像及び表示用テクスチャを描く態様を示す図。
【図6】第2実施形態に係る部品データの構造の概要を示す図。
【図7】QRコードの2次元画像及び表示用テクスチャを描く態様を示す図。
【図8】第3実施形態に係る部品データの構造の概要を示す図。
【図9】QRコードの2次元画像及び表示用テクスチャを描く態様を示す図。
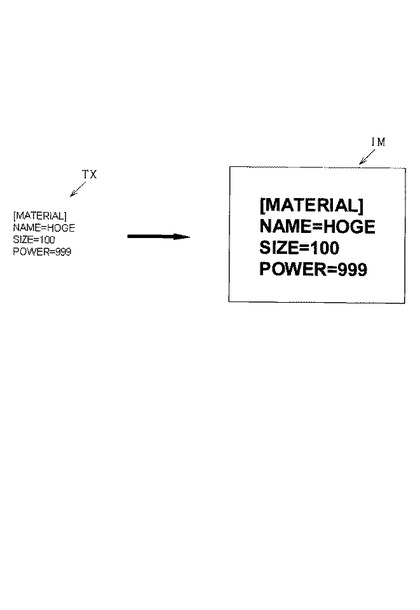
【図10】テキストデータ及びその2次元画像を示す図。
【発明を実施するための形態】
【0039】
(第1実施形態)
以下、第1実施形態について、図面を参照しつつ説明する。本実施形態は、生産ラインの設計段階において、生産ラインでのワークの外観検査をシミュレーションするシミュレーション装置として具体化している。
【0040】
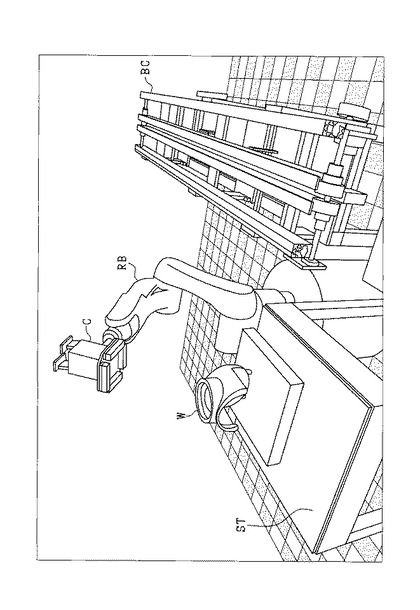
図1は、生産ラインのシミュレーション態様を示す図であり、シミュレーション装置に接続されたモニタの表示する画像を示している。この生産ラインは、ベルトコンベアBC、ロボットRB、カメラC、及び作業台STを備えている。ベルトコンベアBCはワークWを搬送する装置であり、作業台STはワークWを載置する台である。ベルトコンベアBC及び作業台ST(設備)は、設備メーカにより設計される。設備の設計データは、VRML形式のデータとなっており、gif形式のテクスチャデータを含んでいる。ワークWは、製品を構成する部品であり、部品メーカにより設計される。部品の設計データは、DWG形式のデータとなっており、ビットマップ形式のテクスチャデータを含んでいる。ロボットRBは、多関節のアームを備えるロボットであり、アームのハンド部にカメラCが取り付けられている。ロボットRBは、生産ライン設計者により設計される。ロボットRBの設計データは、VRML形式のデータとなっており、ビットマップ形式のテクスチャデータを含んでいる。
【0041】
ワークWの外観検査においては、ベルトコンベアBCによりワークWが搬送され、図示しないロボット等によりワークWが作業台STの上に載置される。そして、ロボットRBは、ワークWの撮影位置までカメラCを移動させ、カメラCによりワークWの外観を撮影させる。その後、撮影により取得されたワークWの画像に基づいて、ワークWの外観が検される。
【0042】
シミュレーション装置は、設備メーカ、部品メーカ、及び生産ライン設計者から提供されるデータを用いて、これらワークWの外観検査の工程をシミュレーションする。その際に、それぞれから提供される設計データは、シミュレーション装置で使用可能なデータ形式(VRML形式)のデータに変換されて用いられる。具体的には、設備メーカから提供されるデータは、データ形式が変換されずにVRML形式のデータとして用いられる。部品メーカから提供されるデータは、DWG形式のデータからVRML形式のデータに変換される。この変換に伴って、部品データに含まれるビットマップ形式のテクスチャデータは、gif形式のテクスチャデータに変換される。生産ライン設計者から提供されるデータは、データ形式が変換されずにVRML形式のデータとして用いられる。なお、上記データ形式の変換は、設備メーカ、部品メーカ、及び生産ライン設計者のいずれが行ってもよい。
【0043】
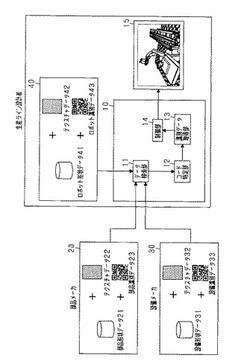
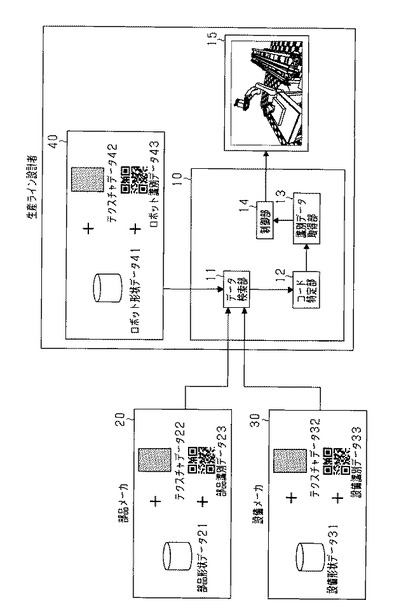
図2は、シミュレーション装置及びデータ構造の概要を示す図である。
【0044】
設備メーカは、上記ベルトコンベアBC及び作業台ST(設備)を設計しており、それらの仕様を表すデータである設備データ30を有している。設備データ30は、設備形状データ31、テクスチャデータ32、及び設備識別データ33を含んでいる。設備形状データ31はVRML形式のデータであり、テクスチャデータ32及び設備識別データ33はgif形式のデータである。設備形状データ31は、設備(シミュレーション対象)の形状を特定する3次元画像データである。テクスチャデータ32は、シミュレーションの実行時に、設備の3次元画像の表面に貼り付けられる表示用テクスチャ(2次元画像)のデータとして指定されている。一般に、テクスチャデータ32は複数設けられている。設備識別データ33(識別データ)は、設備を識別するテキストデータを、2次元画像のデータとして表したものである。詳しくは、設備識別データ33は、設備の型式や、番号等を識別するテキストデータを、QRコード(図形コード)に変換した2次元画像のデータとして表したものである。設備識別データ33は、シミュレーションの実行時に、設備の3次元画像の表面に貼り付けられるQRコードの2次元画像(QRコード画像)のデータとして指定されている。ここで、設備識別データ33は、設備の3次元画像における同一の面に対して、表示用テクスチャよりも先に描かれるQRコード画像のデータとして指定されている。すなわち、テクスチャデータ32のうちの1つは、QRコード画像の上に重ねて描かれる表示用テクスチャのデータとして指定されている。
【0045】
同様にして、部品メーカは、上記ワークW(部品)を設計しており、その仕様を表すデータである部品データ20を有している。部品データ20は、部品形状データ21、テクスチャデータ22、及び部品識別データ23を含んでいる。部品データ20は、ビットマップ形式のテクスチャデータを含むDWG形式のデータから、gif形式のテクスチャデータを含むVRML形式のデータに変換されたデータである。部品形状データ21はVRML形式のデータであり、テクスチャデータ22及び部品識別データ23はgif形式のデータである。部品形状データ21は、部品(シミュレーション対象)の形状を特定する3次元画像データである。テクスチャデータ22は、シミュレーションの実行時に、部品の3次元画像の表面に貼り付けられる表示用テクスチャのデータとして指定されている。一般に、テクスチャデータ22は複数設けられている。部品識別データ23(識別データ)は、部品を識別するテキストデータを、2次元画像のデータとして表したものである。詳しくは、部品識別データ23は、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像のデータとして表したものである。部品識別データ23は、シミュレーションの実行時に、部品の3次元画像の表面に貼り付けられるQRコードの2次元画像(QRコード画像)のデータとして指定されている。ここで、部品識別データ23は、部品の3次元画像における同一の面に対して、表示用テクスチャよりも先に描かれるQRコード画像のデータとして指定されている。すなわち、テクスチャデータ22のうちの1つは、QRコード画像の上に重ねて描かれる表示用テクスチャのデータとして指定されている。
【0046】
また同様にして、生産ライン設計者は、上記ロボットRBを設計しており、その仕様を表すデータであるロボットデータ40を有している。ロボットデータ40は、ロボット形状データ41、テクスチャデータ42、及びロボット識別データ43を含んでいる。ロボット形状データ41はVRML形式のデータであり、テクスチャデータ32及び設備識別データ33はビットマップ形式のデータである。ロボット形状データ41は、ロボット(シミュレーション対象)の形状を特定する3次元画像データである。テクスチャデータ42は、シミュレーションの実行時に、ロボットの3次元画像の表面に貼り付けられる表示用テクスチャのデータとして指定されている。一般に、テクスチャデータ42は複数設けられている。ロボット識別データ43(識別データ)は、ロボットを識別するテキストデータを、2次元画像のデータとして表したものである。詳しくは、ロボット識別データ43は、ロボットの型式や、番号等を識別するテキストデータを、QRコードに変換した2次元画像のデータとして表したものである。ロボット識別データ43は、シミュレーションの実行時に、ロボットの3次元画像の表面に貼り付けられるQRコードの2次元画像(QRコード画像)のデータとして指定されている。ここで、ロボット識別データ43は、ロボットの3次元画像における同一の面に対して、表示用テクスチャよりも先に描かれるQRコード画像のデータとして指定されている。すなわち、テクスチャデータ42のうちの1つは、QRコード画像の上に重ねて描かれる表示用テクスチャのデータとして指定されている。
【0047】
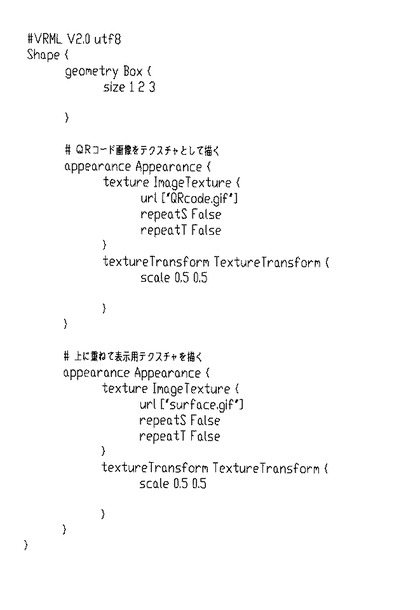
ここで、シミュレーションに用いられる上記データの具体例について説明する。図3は、上記部品データ20の構造の概要を示す図である。ここでは、部品の形状等を簡略化して説明する。
【0048】
同図に示すように、部品の形状は「BOX」(直方体)に指定されており、x,y,z方向における各辺の長さはそれぞれ1,2,3に設定されている。部品の表面に2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“QRcode.gif”という名前のgif形式のデータとなっている。“QRcode.gif”のデータは、上記部品識別データ23に相当し、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータである。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(1/0.5)に指定されている。その後、同一の「BOX」の表面(同一の面)に、別の2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“surface.gif”という名前のgif形式のデータとなっている。“surface.gif”のデータは、上記テクスチャデータ22に相当し、部品の外観検査等で用いられる表示用テクスチャのデータである。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(1/0.5)に指定されている。
【0049】
また、設備データ30では、上記部品に代えて設備について設定されており、データの基本的な構造は部品データ20と同様である。すなわち、設備の形状が設定されるとともに、設備の表面に2次元画像をテクスチャとして貼り付けることが指定されている。設備データ30は、テクスチャのデータとして、上記設備識別データ33に相当するデータと、上記テクスチャデータ32に相当するデータとを備えている。設備識別データ33に相当するデータは、設備の型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、gif形式のデータとなっている。テクスチャデータ32に相当するデータは、設備における同一の面に対して、QRコード画像を貼り付けた後に貼り付ける2次元画像のデータとして指定されており、gif形式のデータとなっている。
【0050】
また、ロボットデータ40では、上記部品に代えてロボットについて設定されており、データの基本的な構造は部品データ20と同様である。すなわち、ロボットの形状が設定されるとともに、ロボットの表面に2次元画像をテクスチャとして貼り付けることが指定されている。ロボットデータ40は、テクスチャのデータとして、上記ロボット識別データ43に相当するデータと、上記テクスチャデータ42に相当するデータとを備えている。ロボット識別データ43に相当するデータは、ロボットの型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、ここではビットマップ形式のデータとなっている。テクスチャデータ42に相当するデータは、ロボットにおける同一の面に対して、QRコード画像を貼り付けた後に貼り付ける2次元画像のデータとして指定されており、ここではビットマップ形式のデータとなっている。
【0051】
図4は、QRコードの2次元画像(QRコード画像)が劣化した状態を示す図である。生産ライン設計者から設備メーカに提供されたQRコード画像のビットマップ形式のデータが、設備メーカによりgif形式やjpg形式のデータに変換された場合にQRコード画像の劣化が生じる。また、部品メーカの有する部品のDWG形式等の設計データが、生産ライン設計者によりVRM形式等のデータに変換されたことに伴って、部品の設計データに含まれるQRコード画像のビットマップ形式のデータが、gif形式等のデータに変換された場合にQRコード画像の劣化が生じる。
【0052】
同図に示すように、ビットマップ形式のデータで特定されるQRコード画像Q1では、光学的特性の異なる2種類(白及び黒)のセルは、それぞれ正確な正方形として表示されている。これに対して、gif形式等のデータで特定されるQRコード画像Q2では、光学的特性の異なる2種類のセルは、それぞれ一部の形状が崩れた状態で表示されている。黒のセルでは、一部に欠けLが生じており、白のセルでは、一部に汚れDが生じている。
【0053】
QRコード画像の読み取りにおいては、QRコード画像Q2の一部に欠けLや汚れDが生じたとしても、画像の解析によりQRコード画像Q2が表すQRコードを特定することができる。そして、QRコードを復号することにより、QRコード画像Q1から取得されるデータと同一のデータを、QRコード画像Q2から取得することができる。すなわち、QRコード画像Q2の一部に欠けLや汚れDがあったとしても、QRコード画像Q2から読み取られるデータは劣化しない。さらに、QRコードは誤り訂正機能を有しているため、取得されたデータの一部に誤りが生じた場合には、その誤りを訂正することができる。
【0054】
図2に戻り、シミュレーション装置10(データ取得装置)は、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を備えている。これらは、演算装置や、記憶装置、入出力インターフェース等により構成されている。
【0055】
データ検索部11(検索部)は、部品メーカ、設備メーカ、及び生産ライン設計者から、部品データ20、設備データ30、及びロボットデータ40をそれぞれ入力して、それぞれのデータの中から特定のデータを検索する。詳しくは、データ検索部11は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における同一の面に対して描かれる画像のデータを検索する。図3に示す例に対しては、データ検索部11は、部品の3次元画像の表面に貼り付けられる2次元画像(テクスチャ)のデータとして指定されているデータから、同一の「BOX」の表面(同一の面)に対して描かれる2次元画像のデータとして指定されているデータを検索する。そして、“QRcode.gif”のデータ及び“surface.gif”のデータが検索される。
【0056】
コード特定部12(特定部)は、データ検索部11から上記検索されたデータを読み込み、そのデータを解析してQRコードを特定する。詳しくは、データ検索部11により検索されたデータには、それぞれ識別データ23,33,43(QRコード画像のデータ)が含まれている。このため、QRコード画像のデータをそれぞれ解析して、QRコード画像が表すQRコードをそれぞれ特定する。図3に示す例に対しては、“QRcode.gif”のデータ及び“surface.gif”のデータが解析され、“QRcode.gif”のデータからQRコード画像、ひいてはQRコードが特定される。ここで、“QRcode.gif”のデータはgif形式のデータであるため、QRコード画像の一部に欠けLや汚れDが生じることとなるが、画像の解析によりQRコード画像が表すQRコードを特定することができる。また、設備データ30において、設備識別データ33に相当するデータを解析する場合も同様である。なお、ロボットデータ40において、ロボット識別データ43に相当するデータはビットマップ形式のデータであるため、ロボット識別データ43に相当するデータを解析する場合は、QRコード画像に欠けLや汚れDは生じていない。
【0057】
識別データ取得部13(取得部)は、コード特定部12から上記特定されたQRコードを読み込み、QRコードを復号してシミュレーション対象を識別するテキストデータを取得する。ここで、コード特定部12により特定されたQRコードに誤りが存在しなかった場合には、識別データ23,33,43から、シミュレーション対象を識別する適切なテキストデータがそれぞれ取得される。また、コード特定部12により特定されたQRコードの一部に誤りが存在した場合であっても、QRコードの誤り訂正機能によりその誤りが訂正される。
【0058】
制御部14は、識別データ取得部13から上記取得されたテキストデータを読み込み、そのテキストデータによりシミュレーション対象を識別した結果を用いて、部品の外観検査の工程をシミュレーションする。そして、制御部14は、シミュレーションの結果をモニタ15(表示装置)に表示させる。ここで、図5に示すように、QRコード画像Qがシミュレーション対象の面S1に貼り付けられた直後に、同一の面S1に表示用テクスチャTTが貼り付けられる。このため、シミュレーションの実行時に、QRコード画像Qは外観上表示されることはなく、QRコード画像Qと表示用テクスチャTTとがちらつくことを抑制することができる。したがって、識別データ23,33,43を有するデータ20,30,40を用いて、識別データ23,33,43を有しないデータと同様にシミュレーションを行うことができる。
【0059】
以上詳述した本実施形態は以下の利点を有する。
【0060】
・データ20,30,40は、シミュレーション対象を識別するデータである識別データ23,33,43をそれぞれ備えている。識別データ23,33,43は、形状データ21,31,41により特定される3次元画像に対してそれぞれ描かれるテクスチャ(2次元画像)のデータとして指定されている。このため、一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、シミュレーションに用いられるデータの一部であるテクスチャのデータとして、3次元画像データに識別データ23,33,43を付与することができる。さらに、データ20,30,40のうち識別データ23,33,43に対応する2次元画像のデータをそれぞれ特定し、その2次元画像を解析することにより、シミュレーション対象を識別するテキストデータを取得することができる。このため、データの形式が変換された場合に、識別データ23,33,43に対応する2次元画像が劣化するおそれはあるものの、2次元画像に基づいて取得される識別データとしてのテキストデータが欠損することを抑制することができる。
【0061】
・シミュレーションの実行時に、形状データ21,31,41により特定される3次元画像に対して、識別データ23,33,43に対応するQRコード画像がそれぞれ描かれ、そのQRコード画像の上に重ねて表示用テクスチャが描かれる。このため、識別データ23,33,43に対応するQRコード画像が外観上表示されることはなく、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことができる。
【0062】
・識別データ23,33,43に対応するQRコード画像のデータと表示用テクスチャのデータとは、形状データ21,31,41により特定される3次元画像における同一の面に対してそれぞれ描かれる画像のデータとして指定されている。こうした構成によれば、シミュレーション対象の3次元画像に新たな面を設ける必要がなく、表示用テクスチャと同様にして、元々の3次元画像に対して識別データ23,33,43に対応するQRコード画像を描くことができる。
【0063】
・識別データ23,33,43に対応するQRコード画像のデータは、表示用テクスチャよりも先に描かれる画像のデータとして指定されている。こうした構成によれば、シミュレーションの実行時に形状データ21,31,41により特定される3次元画像の同一の面に対して、識別データ23,33,43に対応するQRコード画像がそれぞれ描かれた後に表示用テクスチャが描かれる。このため、形状データ21,31,41により特定される3次元画像を表示する際に、識別データ23,33,43に対応するQRコード画像と表示用テクスチャとがちらつくことを抑制することができる。
【0064】
・識別データ23,33,43に対応する2次元画像は、識別データ23,33,43をそれぞれQRコードに変換した2次元画像であるため、データ形式の変換に伴ってQRコードの画像が劣化したとしても、QRコードに基づいて取得される識別データとしてのテキストデータの劣化を抑制することができる。すなわち、実物に印刷されたQRコードが若干不明瞭であったとしても、QRコードから読み取られるデータは劣化しない。これと同様にして、形状データ21,31,41により特定される3次元画像に対して描かれたQRコードが若干不明瞭であったとしても、QRコードから読み取られる識別データとしてのテキストデータは劣化しない。
【0065】
・QRコードは、誤り訂正機能を有する図形コードであるため、データ形式の変換に伴ってQRコードの画像が劣化し、QRコードから読み取られるデータの一部に誤りが生じたとしても、データの誤りを訂正することができる。すなわち、実物に印刷されたQRコードの一部が汚れ等により欠損したとしても、誤り訂正機能により読み取りデータの誤りを訂正することができる。これと同様にして、形状データ21,31,41により特定される3次元画像に対して描かれたQRコードの一部がデータ形式の変換に伴って欠損したとしても、誤り訂正機能により識別データとしてのテキストデータの誤りを訂正することができる。要するに、実物に印刷されたQRコードが汚れ等に強いという特性を持つのと同様に、3次元画像に対して描かれたQRコードはデータ形式の変換に強いという特性を持つ。したがって、識別データとしてのテキストデータの劣化をより効果的に抑制することができる。
【0066】
・データ検索部11により、データ20,30,40から、形状データ21,31,41により特定される3次元画像における同一の面に描かれる画像のデータとして指定されているデータがそれぞれ検索される。このため、データ20,30,40の中から、識別データ23,33,43に対応する2次元画像のデータをそれぞれ検索することができる。
【0067】
・コード特定部12により、データ20,30,40のうち、形状データ21,31,41により特定される3次元画像に対して描かれるQRコード画像のデータとして指定されているデータがそれぞれ解析され、QRコードが特定される。すなわち、形状データ21,31,41により特定される3次元画像に対して描かれるQRコード画像のデータから、識別データ23,33,43をQRコードに変換した2次元画像のデータがそれぞれ特定される。そして、識別データ取得部13により、コード特定部12で特定されたQRコードを復号することにより、シミュレーション対象を識別する識別データとしてのテキストデータを取得することができる。
【0068】
なお、本実施形態を、以下のように変形して実施することもできる。
【0069】
・シミュレーション装置10において、3次元画像に対して下に描かれるテクスチャと上に描かれるテクスチャとを指定することができる場合には、識別データ23,33,43に対応するQRコード画像を下に描かれるテクスチャとして指定し、表示用テクスチャを上に描かれるテクスチャとして指定してもよい。こうした構成によれば、シミュレーションの実行時に3次元画像の同一の面において、識別データ23,33,43に対応するQRコード画像の上に重ねて表示用テクスチャが描かれる。このため、シミュレーション対象の3次元画像を表示する際に、QRコード元画像と表示用テクスチャとがちらつくことを抑制することができる。
【0070】
・上記実施形態では、データ検索部11が、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における同一の面に対して描かれる画像のデータを検索した後に、コード特定部12が、検索されたデータを解析してQRコードを特定した。しかしながら、コード特定部12(特定部)が、各データ20,30,40のうち、3次元画像に対して描かれるテクスチャのデータとして指定されているデータを全て解析して、QRコードを特定することもできる。その場合には、シミュレーションに支障がなければ、表示用テクスチャの描かれていない面にQRコード画像を表示してもよい。
【0071】
・シミュレーションに支障がなければ、表示用テクスチャの上に重ねてQRコード画像を描いたり、表示用テクスチャを省略してQRコード画像を描いたりすることもできる。
【0072】
(第2実施形態)
第1実施形態では、識別データ23,33,43に対応するQRコード画像が外観上表示されないようにするために、QRコード画像の上に重ねて表示用テクスチャを描くようにした。これに対して、第2実施形態では、形状データ21,31,41により特定される3次元画像の内面に、識別データ23,33,43に対応するQRコード画像をそれぞれ描くようにしている。その他の点は、第1実施形態と同様であるため、以下、第1実施形態との相違点を中心に説明する。
【0073】
図6は、上記部品データ20の構造の概要を示す図である。ここでは、部品の形状等を簡略化して説明する。
【0074】
同図に示すように、部品の形状は「BOX」(直方体)に指定されており、x,y,z方向における各辺の長さはそれぞれ1,2,3に設定されている。
【0075】
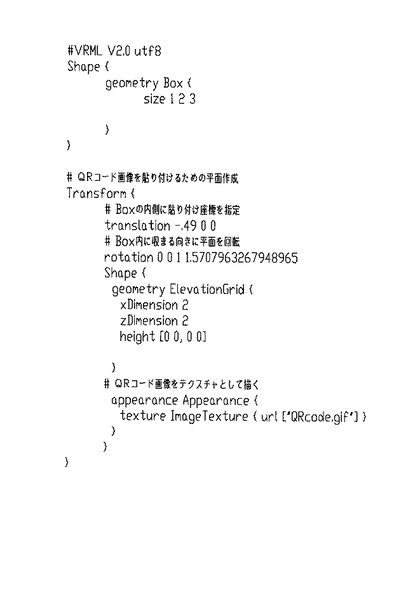
原点を「BOX」の中心としてx方向に垂直な面の位置−0.5(x方向)に対して、その内側で近傍となる位置、すなわちx方向に−0.49、y方向に0、及びz方向に0の位置が、QRコード画像を貼り付ける平面の基準座標として設定されている。その基準座標において、この平面は、z軸回りに90°(1.57rad)回転させられ、x方向に垂直な面と平行になるように設定されている。この面は、x方向のメッシュ数が2、z方向のメッシュ数2、高さが0に設定されている。
【0076】
そして、平面の表面(部品の内面)に2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“QRcode.gif”という名前のgif形式のデータとなっている。“QRcode.gif”のデータは、上記部品識別データ23に相当し、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータである。テクスチャとしてのQRコード画像は、繰り返し数、及び表示スケールが省略されている。
【0077】
ここでは記載していないが、第1実施形態と同様にして、部品データ20では、同一の「BOX」の表面(部品の外面)に、別の2次元画像をテクスチャとして貼り付けることが指定されている。この2次元画像のデータは“surface.gif”という名前のgif形式のデータとなっている。“surface.gif”のデータは、上記テクスチャデータ22に相当し、部品の外観検査等で用いられる表示用テクスチャのデータである。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(1/0.5)に指定されている。
【0078】
また、設備データ30では、上記部品に代えて設備について設定されており、データの基本的な構造は部品データ20と同様である。すなわち、設備の形状が設定されるとともに、設備の内面と外面とに2次元画像をテクスチャとして貼り付けることが指定されている。設備データ30は、テクスチャのデータとして、上記設備識別データ33に相当するデータ(設備の内面に貼り付ける画像のデータ)と、上記テクスチャデータ32に相当するデータ(設備の外面に貼り付ける画像のデータ)とを備えている。設備識別データ33に相当するデータは、設備の型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、gif形式のデータとなっている。テクスチャデータ32に相当するデータは、設備の外面に対して貼り付ける2次元画像のデータとして指定されており、gif形式のデータとなっている。
【0079】
また、ロボットデータ40では、上記部品に代えてロボットについて設定されており、データの基本的な構造は部品データ20と同様である。すなわち、ロボットの形状が設定されるとともに、ロボットの内面と外面とに2次元画像をテクスチャとして貼り付けることが指定されている。ロボットデータ40は、テクスチャのデータとして、上記ロボット識別データ43に相当するデータ(設備の内面に貼り付ける画像のデータ)と、上記テクスチャデータ42に相当するデータ(設備の外面に貼り付ける画像のデータ)とを備えている。ロボット識別データ43に相当するデータは、ロボットの型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、ここではビットマップ形式のデータとなっている。テクスチャデータ42に相当するデータは、ロボットの外面に対して貼り付ける2次元画像のデータとして指定されており、ここではビットマップ形式のデータとなっている。
【0080】
図2に示したように、シミュレーション装置10(データ取得装置)は、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を備えている。これらは、演算装置や、記憶装置、入出力インターフェース等により構成されている。
【0081】
データ検索部11(検索部)は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における内部の面(内側の面)に対して描かれる画像のデータを検索する。図6に示す例に対しては、データ検索部11は、部品の3次元画像の表面に貼り付けられる2次元画像(テクスチャ)のデータとして指定されているデータから、「BOX」の内部に作成された平面に対して描かれる2次元画像のデータとして指定されているデータを検索する。そして、“QRcode.gif”のデータが検索される。
【0082】
コード特定部12(特定部)は、第1実施形態と同様に、データ検索部11から上記検索されたデータを読み込み、そのデータを解析してQRコードを特定する。図6に示す例に対しては、“QRcode.gif”のデータが解析され、“QRcode.gif”のデータからQRコード画像、ひいてはQRコードが特定される。
【0083】
識別データ取得部13(取得部)は、第1実施形態と同様に、コード特定部12から上記特定されたQRコードを読み込み、QRコードを復号してシミュレーション対象を識別するテキストデータを取得する。ここで、コード特定部12により特定されたQRコードの一部に誤りが存在した場合であっても、QRコードの誤り訂正機能によりその誤りが訂正される。
【0084】
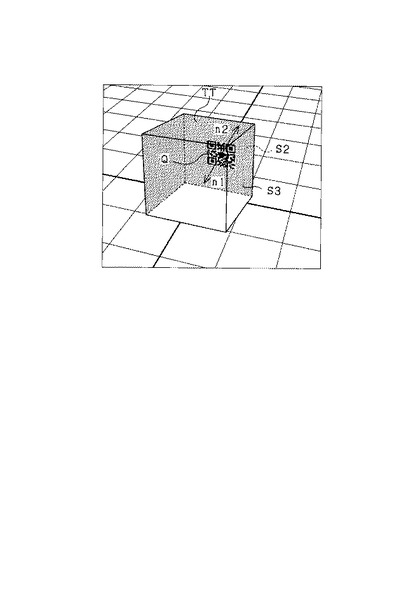
制御部14は、第1実施形態と同様に、識別データ取得部13から上記取得されたテキストデータを読み込み、そのテキストデータによりシミュレーション対象を識別した結果を用いて、部品の外観検査の工程をシミュレーションする。そして、制御部14は、シミュレーションの結果をモニタ15(表示装置)に表示させる。ここで、図7に示すように、QRコード画像Qは、シミュレーション対象の内部に作成された平面S3に貼り付けられている。表示を一部省略しているが、シミュレーション対象の表面S2等(外面)には、表示用テクスチャTTが貼り付けられている。このため、シミュレーションの実行時に、QRコード画像Qは外観上表示されることはなく、QRコード画像Qと表示用テクスチャTTとがちらつくことを抑制することができる。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しないデータと同様にシミュレーションを行うことができる。
【0085】
以上詳述した本実施形態は以下の利点を有する。ここでは、第1実施形態と相違する利点のみを述べる。
【0086】
・識別データ23,33,43は、形状データ21,31,41により特定される3次元画像の内部に作成された平面 (内側の面)に対してそれぞれ描かれるテクスチャ(2次元画像)のデータとして指定されている。このため、シミュレーションの実行時に、識別データ23,33,43に対応する2次元画像は3次元画像の内側に描かれ、外観上表示されることが抑制される。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことができる。
【0087】
・シミュレーション対象の内部に平面を作成して、その平面に識別データ23,33,43に対応するQRコード画像をそれぞれ貼り付けている。このため、シミュレーション装置10において、形状データ21,31,41により特定される3次元画像における同一の面に対して、内側と外側とにテクスチャを貼り付けることができない場合であっても、QRコード画像を3次元画像の内側に描くことができる。
【0088】
・データ検索部11により、データ20,30,40から、形状データ21,31,41により特定される3次元画像の内側の面に対して描かれる2次元画像のデータとして指定されているデータがそれぞれ検索される。このため、データ20,30,40の中から、識別データ23,33,43に対応する2次元画像のデータをそれぞれ検索することができる。
【0089】
なお、本実施形態を、以下のように変形して実施することもできる。
【0090】
・シミュレーション装置10において、形状データ21,31,41により特定される3次元画像における同一の面に対して、内側と外側とにテクスチャを貼り付けることができる場合には、以下のように実施することもできる。すなわち、識別データ23,33,43とテクスチャデータ22,32,42とを、3次元画像における同一の面に対して内面と外面とにそれぞれ描かれる画像のデータとして指定する。こうした構成によれば、識別データ23,33,43に対応するQRコード画像が表示用テクスチャにより覆われ、外観上表示されることが抑制される。さらに、シミュレーション対象の3次元画像に新たな面を設ける必要がなく、表示用テクスチャと同様にして、元々の3次元画像に対して識別データ23,33,43に対応するQRコード画像を描くことができる。この場合には、図7に示すように、QRコード画像Qと表示用テクスチャTTとについて、3次元画像に対して画像を描く向きを示す法線ベクトルn1,n2を互いに逆向きに指定するとよい。
【0091】
・シミュレーションに支障がなければ、表示用テクスチャの描かれない面の内側にQRコード画像を描いたり、3次元画像の外面に描かれる表示用テクスチャを省略して、3次元画像の内部に作成された平面又は3次元画像の内面に、QRコード画像を描いたりすることもできる。
【0092】
・上記実施形態では、データ検索部11は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における内部の面(内側の面)に対して描かれる画像のデータを検索した後に、コード特定部12が、検索されたデータを解析してQRコードを特定した。しかしながら、コード特定部12(特定部)が、各データ20,30,40のうち、3次元画像における内部の面に対して描かれるテクスチャのデータとして指定されているデータを全て解析して、QRコードを特定することもできる。
【0093】
・上記実施形態では、シミュレーション装置10のデータ検索部11が、各データ20,30,40から、3次元画像における内部の面に対して描かれるQRコード画像のデータを検索した。しかしながら、検索された画像のデータを解析するのではなく、作業者がモニタ15において3次元画像を見ながら、識別データ23,33,43に対応するQRコード画像を探すこともできる。この場合には、データ20,30,40の構造を以下のようにするとよい。
【0094】
すなわち、識別データ23,33,43に対応するQRコード画像のデータを、3次元画像の内面を所定方向から撮影した場合に表示される画像のデータとして指定する。例えば、部品の形状を「BOX」(直方体)に指定し、x,y,z方向における各辺の長さをそれぞれ1,2,3に設定したとする。原点を「BOX」の中心としてz方向に垂直な面の位置1.5(z方向)に対して、その内側で近傍となる位置、すなわちx方向に0、y方向に0、及びz方向に1.49の位置を、QRコード画像を貼り付ける平面の基準座標として設定する。その基準座標において、この平面を、z方向に垂直な面と平行になるように回転させるように設定する。そして、この平面にQRコード画像を貼り付けるように設定する。こうした構成によれば、シミュレーションの実行時に、3次元画像の内面をz方向の負から正側へ撮影することにより、識別データ23,33,43に対応するQRコード画像が表示される。このため、識別データ23,33,43に対応するQRコード画像を容易に探すことができる。
【0095】
また上記例によれば、識別データ23,33,43は、3次元画像の内面を撮影した場合に、識別データ23,33,43に対応するQRコード画像の描かれる位置(0,0,1.49)と撮影位置(0,0,0)との距離が、1.0(所定距離)よりも長くなる内面に描かれる画像のデータとして指定されている。こうした構成によれば、シミュレーションの実行時に、3次元画像の内面を撮影した場合に、QRコード画像と撮影位置との距離を確保することができ、QRコード画像を適切に表示することができる。したがって、識別データ23,33,43に対応するQRコード画像を容易に探すことができる。
【0096】
(第3実施形態)
第1実施形態では、識別データ23,33,43に対応するQRコード画像が外観上表示されないようにするために、QRコード画像の上に重ねて表示用テクスチャを描くようにした。これに対して、第3実施形態では、形状データ21,31,41により特定される3次元画像に対して、それぞれ識別データ23,33,43に対応するQRコード画像を、外観上無視することのできる大きさで描くようにしている。その他の点は、第1実施形態と同様であるため、以下、第1実施形態との相違点を中心に説明する。
【0097】
図8は、上記部品データ20の構造の概要を示す図である。ここでは、部品の形状等を簡略化して説明する。
【0098】
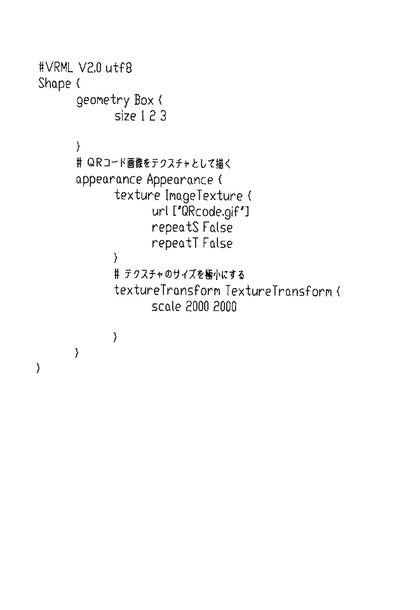
同図に示すように、部品の形状は「BOX」(直方体)に指定されており、x,y,z方向における各辺の長さはそれぞれ1,2,3に設定されている。部品の表面に2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“QRcode.gif”という名前のgif形式のデータとなっている。“QRcode.gif”のデータは、上記部品識別データ23に相当し、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータである。このテクスチャを貼り付ける際に、表示スケールはx方向及びy方向共に1/2000倍(第2倍率)に指定されている。これにより、シミュレーションの実行時に、QRコード画像は部品の3次元画像に対して外観上無視することのできる大きさで描かれ、また部品が移動される際の最小移動量と比較して1000分の1未満の大きさで描かれる。なお、テクスチャとしてのQRコード画像は、繰り返し数が省略されている。
【0099】
ここでは記載していないが、第1実施形態と同様にして、部品データ20では、同一の「BOX」の表面(同一の面)に、別の2次元画像をテクスチャとして貼り付けることが指定されている。この2次元画像のデータは“surface.gif”という名前のgif形式のデータとなっている。“surface.gif”のデータは、上記テクスチャデータ22に相当し、部品の外観検査等で用いられる表示用テクスチャのデータである。この表示用テクスチャは、上記QRコード画像よりも先に、部品の表面に貼り付けられる。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(第1倍率)に指定されている。したがって、部品の3次元画像に対して、QRコード画像は表示用テクスチャよりも小さい倍率で描かれる。
【0100】
また、設備データ30では、上記部品に代えて設備について設定されており、データの基本的な構造は部品データ20と同様である。すなわち、設備の形状が設定されるとともに、設備の表面に2次元画像をテクスチャとして貼り付けることが指定されている。設備データ30は、テクスチャのデータとして、上記設備識別データ33に相当するデータと、上記テクスチャデータ32に相当するデータとを備えている。設備識別データ33に相当するデータは、設備の型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、gif形式のデータとなっている。テクスチャデータ32に相当するデータは、設備における同一の面に対してQRコード画像よりも先に貼り付ける2次元画像のデータとして指定されており、gif形式のデータとなっている。
【0101】
また、ロボットデータ40では、上記部品に代えてロボットについて設定されており、データの基本的な構造は部品データ20と同様である。すなわち、ロボットの形状が設定されるとともに、ロボットの表面に2次元画像をテクスチャとして貼り付けることが指定されている。ロボットデータ40は、テクスチャのデータとして、上記ロボット識別データ43に相当するデータと、上記テクスチャデータ42に相当するデータとを備えている。ロボット識別データ43に相当するデータは、ロボットの型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、ここではビットマップ形式のデータとなっている。テクスチャデータ42に相当するデータは、ロボットにおける同一の面に対してQRコード画像よりも先に貼り付ける2次元画像のデータとして指定されており、ここではビットマップ形式のデータとなっている。
【0102】
図2に示したように、シミュレーション装置10(データ取得装置)は、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を備えている。これらは、演算装置や、記憶装置、入出力インターフェース等により構成されている。
【0103】
データ検索部11(検索部)は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像に対して、最も小さい倍率で描かれる画像のデータとして指定されているデータを検索する。図8に示す例に対しては、データ検索部11は、部品の3次元画像の表面に貼り付けられる2次元画像(テクスチャ)のデータとして指定されているデータから、最も小さい倍率で描かれる2次元画像のデータとして指定されているデータを検索する。そして、“QRcode.gif”のデータが検索される。なお、データ検索部11が、部品の3次元画像の表面に貼り付けられる2次元画像のデータとして指定されているデータから、所定倍率(例えば1/100倍率)よりも小さい倍率で描かれる2次元画像のデータとして指定されているデータを検索するようにしてもよい。
【0104】
コード特定部12(特定部)は、第1実施形態と同様に、データ検索部11から上記検索されたデータを読み込み、そのデータを解析してQRコードを特定する。図8に示す例に対しては、“QRcode.gif”のデータが解析され、“QRcode.gif”のデータからQRコード画像、ひいてはQRコードが特定される。
【0105】
識別データ取得部13(取得部)は、第1実施形態と同様に、コード特定部12から上記特定されたQRコードを読み込み、QRコードを復号してシミュレーション対象を識別するテキストデータを取得する。ここで、コード特定部12により特定されたQRコードの一部に誤りが存在した場合であっても、QRコードの誤り訂正機能によりその誤りが訂正される。
【0106】
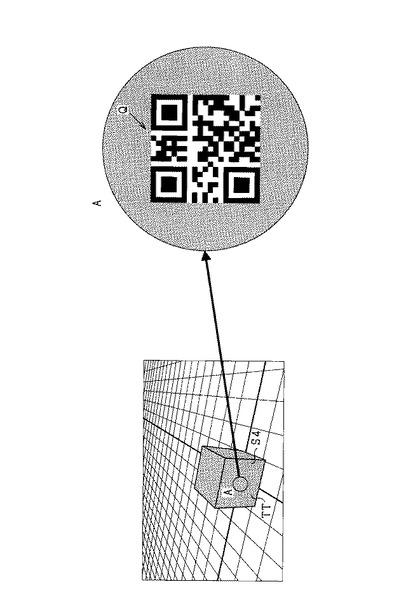
制御部14は、第1実施形態と同様に、識別データ取得部13から上記取得されたテキストデータを読み込み、そのテキストデータによりシミュレーション対象を識別した結果を用いて、部品の外観検査の工程をシミュレーションする。そして、制御部14は、シミュレーションの結果をモニタ15(表示装置)に表示させる。ここで、図9に示すように、QRコード画像Qは、シミュレーション対象の面S4に対して、表示用テクスチャTTの上に重ねて外観上無視することのできる大きさで描かれている。このため、シミュレーションの実行時に、QRコード画像Qは極小の点として表示される。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しないデータと同様にシミュレーションを行うことができる。
【0107】
以上詳述した本実施形態は以下の利点を有する。ここでは、第1実施形態と相違する利点のみを述べる。
【0108】
・シミュレーションの実行時に、識別データ23,33,43に対応するQRコード画像は、それぞれ形状データ21,31,41により特定される3次元画像に対して、表示用テクスチャを描く倍率である第1倍率(2倍)よりも小さい第2倍率(1/2000倍)で描かれる。すなわち、QRコード画像は、シミュレーション対象の3次元画像に対して、外観上無視することのできる大きさで描かれ、極小の点として表示される。このため、QRコード元画像が、シミュレーション対象の外観に影響を与えることを微小にすることができる。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことが可能となる。
【0109】
・QRコード画像は、シミュレーション対象の3次元画像に対して、外観上無視することのできる大きさで描かれるため、表示用テクスチャの上に重ねてQRコード画像を描くことができる。
【0110】
・データ検索部11により、データ20,30,40から、形状データ21,31,41により特定される3次元画像に対して最も小さい倍率で描かれる画像のデータとして指定されているデータがそれぞれ検索される。このため、データ20,30,40の中から、識別データ23,33,43に対応する2次元画像のデータをそれぞれ検索することができる。なお、データ検索部11により、データ20,30,40から、3次元画像に対して所定倍率(例えば1/100倍率)よりも小さい倍率で描かれる画像のデータとして指定されているデータを検索するようにしても同様である。
【0111】
なお、本実施形態を、以下のように変形して実施することもできる。
【0112】
・上記実施形態では、データ検索部11は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像に対して、最も小さい倍率で描かれる画像のデータとして指定されているデータを検索した後に、コード特定部12が、検索されたデータを解析してQRコードを特定した。しかしながら、コード特定部12(特定部)が、各データ20,30,40のうち、3次元画像に対して描かれるテクスチャのデータとして指定されているデータを全て解析して、QRコードを特定することもできる。
【0113】
・上記実施形態では、シミュレーション装置10のデータ検索部11が、各データ20,30,40から、3次元画像に対して、最も小さい倍率で描かれる画像のデータとして指定されているデータを検索した。しかしながら、検索された画像のデータを解析するのではなく、作業者がモニタ15において3次元画像を見ながら、識別データ23,33,43に対応するQRコード画像を探すこともできる。この場合には、データ20,30,40の構造を以下のようにするとよい。
【0114】
すなわち、識別データ23,33,43に対応するQRコード画像のデータを、基準位置において3次元画像を所定方向から撮影した場合に表示される画像のデータとして指定する。例えば、部品の形状を「BOX」(直方体)に指定し、x,y,z方向における各辺の長さをそれぞれ1,2,3に設定したとする。この場合には、部品のz方向に垂直な面の表面にQRコード画像を貼り付けるように指定する。こうした構成によれば、シミュレーションの実行時に、例えば基準位置(0,0,4)において3次元画像をz方向の正から負側へ撮影することにより、識別データ23,33,43に対応するQRコード画像が表示される。そして、QRコード画像を、例えば表示スケールの逆数倍して表示させることにより、QRコード画像を適切な大きさで表示させることができる。このため、識別データ23,33,43に対応するQRコード画像を容易に探すことができる。
【0115】
なお、上記の各実施形態を、以下のように変形して実施することもできる。
【0116】
・作業台STの設計を生産ライン設計者が行ったり、ロボットRBの設計をロボットメーカが行ったりしてもよい。要するに、それら作業台ST及びロボットRBのデータが、シミュレーション装置10に提供されればよい。
【0117】
・誤り訂正機能を有する図形コードとして、QRコードに代えてデータマトリクスコードを採用することもできる。また、QRコードに代えて、誤り訂正機能を有しない図形コードを採用することもでき、その他の2次元コードや、バーコードを採用することもできる。これらの場合であっても、データ形式の変換に伴って図形コードの画像が劣化したとしても、図形コードに基づいて取得される識別データとしてのテキストデータの劣化を抑制することができる。
【0118】
・識別データ23,33,43をQRコード画像のデータとし、シミュレーションの実行時に、3次元画像の表面に無色で貼り付けられる表示用テクスチャのデータとして指定してもよい。こうした構成によれば、シミュレーションの実行時に、識別データ23,33,43に対応するQRコード画像は無色で描かれるため、シミュレーションに影響を与えることを防止することができる。その結果、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことができる。
【0119】
・シミュレーション装置10において、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を、コンピュータプログラムの機能としてそれぞれ実現することもできる。その場合には、コンピュータプログラムの記録された媒体を、シミュレーション装置10(コンピュータ)により読み込み、そのコンピュータプログラム(方法)を実行するとよい。
【0120】
・図10に示すように、テクスチャとしての識別データ23,33,43が、シミュレーション対象を識別するテキストデータTXを、テキスト(文字)の2次元画像IMとして表すようにすることもできる。そして、2次元画像IMをOCR(Optical Character Recognition)等で解析することにより、テキストデータTXを取得することができる。この場合であっても、シミュレーションに用いられるデータ20,30,40の一部である2次元画像のデータとして、データ20,30,40にそれぞれ識別データ23,33,43を付与することができる。さらに、データの形式が変換された場合に、識別データ23,33,43に対応する2次元画像IMが劣化するおそれはあるものの、2次元画像IMに基づいて取得される識別データとしてのテキストデータTXが欠損することを抑制することができる。
【符号の説明】
【0121】
10…シミュレーション装置(データ取得装置、コンピュータ)、15…モニタ、20…部品データ、21…部品形状データ(3次元画像データ)、22…テクスチャデータ、23…部品識別データ(識別データ)、30…設備データ、31…設備形状データ(3次元画像データ)、32…テクスチャデータ、33…設備識別データ(識別データ)、40…ロボットデータ、41…ロボット形状データ(3次元画像データ)、42…テクスチャデータ、43…ロボット識別データ(識別データ)。
【技術分野】
【0001】
本発明は、生産ラインのシミュレーションに用いられるデータ、そのデータを使用するコンピュータプログラム及びデータ取得装置に関する。
【背景技術】
【0002】
CAD(Computer Aided Design)データなどの3次元画像データを用いてシミュレーションを行う場合、3次元画像データは形状や、表面の色彩、模様に関するデータのみを有する。このため、3次元画像で表示されるシミュレーション対象を識別するためには、3次元画像データとは別に識別データが必要となる。
【0003】
そこで、3次元画像データのファイルとは異なる補助ファイルに識別データを保存し、その識別データをシミュレーションに用いる方法がある。
【0004】
また、画像データを含むデータにおいて、ヘッダー領域などの未定義領域に識別データを格納する方法がある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002―300372
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、補助ファイルを用いる方法では、ファイルの管理が煩雑となる。
【0007】
また、データの未定義領域に識別データを格納する方法では、未定義領域に識別データを格納することのできる特別なソフトウェアを用いる必要がある。さらに、画像データのファイル形式(データ形式)を変換すると、その変換に伴って識別データが欠損するおそれがある。
【0008】
本発明は、こうした実情に鑑みてなされたものであり、その主たる目的は、一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制することにある。
【課題を解決するための手段】
【0009】
本発明は、上記課題を解決するために、以下の手段を採用した。
【0010】
第1の手段は、生産ラインのシミュレーションに用いられるデータの構造であって、シミュレーション対象の3次元画像を特定する3次元画像データと、前記シミュレーションの実行時に表示される表示用テクスチャのデータと、前記シミュレーション対象を識別するデータである識別データと、を備え、前記表示用テクスチャのデータは、前記3次元画像の外面に対して描かれる画像のデータとして指定され、前記識別データは、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されていることを特徴とする。
【0011】
上記データ構造を有するデータは、生産ラインのシミュレーションに用いられる。そして、このデータ構造は、シミュレーション対象の3次元画像を特定する3次元画像データを備えているため、生産ラインのシミュレーション実行時に、シミュレーション対象の3次元画像が表示される。その際、表示用テクスチャが、3次元画像の外面に対して描かれ、シミュレーション対象の外観検査等に用いられる。
【0012】
ここで、上記データ構造は、シミュレーション対象を識別するデータである識別データを備えており、この識別データは3次元画像に対して描かれる2次元画像のデータとして指定されている。このため、一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、シミュレーションに用いられるデータの一部である2次元画像のデータとして、3次元画像データに識別データを付与することができる。さらに、シミュレーションに用いられるデータのうち識別データに対応する2次元画像のデータを特定し、その2次元画像を解析することにより、シミュレーション対象を識別する識別データを取得することができる。このため、データの形式が変換された場合に、識別データに対応する2次元画像が劣化するおそれはあるものの、2次元画像に基づいて取得される識別データが欠損することを抑制することができる。
【0013】
さらに、識別データは、3次元画像の内面に対して描かれる2次元画像のデータとして指定されている。このため、シミュレーションの実行時に、識別データに対応する2次元画像は3次元画像の内面に描かれ、外観上表示されることが抑制される。したがって、識別データを有する3次元画像データを用いて、識別データを有しない3次元画像データと同様にシミュレーションを行うことができる。
【0014】
第2の手段では、前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像における同一の面に対して描かれる画像のデータとして指定されている。
【0015】
上記構成によれば、シミュレーションの実行時に、識別データに対応する2次元画像と表示用テクスチャとは、3次元画像における同一の面に対して、それぞれ内面と外面とに描かれる。このため、識別データに対応する2次元画像が表示用テクスチャにより覆われ、外観上表示されることが抑制される。さらに、シミュレーション対象の3次元画像に新たな面を設ける必要がなく、表示用テクスチャと同様にして、元々の3次元画像に対して識別データに対応する2次元画像を描くことができる。
【0016】
具体的には、第3の手段のように、前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像に対して画像を描く向きを示す法線ベクトルが互いに逆向きに指定されているといった構成を採用することができる。
【0017】
第4の手段では、前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を所定方向から撮影した場合に表示される画像のデータとして指定されている。
【0018】
上記構成によれば、シミュレーションの実行時に、3次元画像の内面を所定方向から撮影することにより、識別データに対応する2次元画像が表示される。このため、画像データを解析するのではなく、作業者が3次元画像を見ながら識別データに対応する2次元画像を探す場合に、識別データに対応する2次元画像を容易に探すことができる。
【0019】
第5の手段では、前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を撮影した場合に、前記識別データに対応する前記2次元画像の描かれる位置と撮影位置との距離が所定距離よりも長くなる内面に描かれる画像のデータとして指定されている。
【0020】
上記構成によれば、シミュレーションの実行時に、3次元画像の内面を撮影した場合に、識別データに対応する2次元画像の描かれた内面と撮影位置との距離が所定距離よりも長くなる。このため、識別データに対応する2次元画像と撮影位置との距離を確保することができ、識別データに対応する2次元画像を適切に表示することができる。したがって、画像データを解析するのではなく、作業者が3次元画像を見ながら識別データに対応する2次元画像を探す場合に、識別データに対応する2次元画像を容易に探すことができる。
【0021】
第6の手段では、前記識別データに対応する前記2次元画像のデータは、無色で描かれる画像のデータとして指定されている。
【0022】
上記構成によれば、シミュレーションの実行時に、識別データに対応する2次元画像のデータは無色で描かれるため、シミュレーションに影響を与えることを防止することができる。その結果、識別データを有する3次元画像データを用いて、識別データを有しない3次元画像データと同様にシミュレーションを行うことができる。
【0023】
第7の手段では、前記識別データに対応する前記2次元画像は、前記識別データを図形コードに変換した2次元画像である。
【0024】
上記構成によれば、識別データに対応する2次元画像は、識別データを図形コードに変換した2次元画像であるため、データ形式の変換に伴って図形コードの画像が劣化したとしても、図形コードに基づいて取得される識別データの劣化を抑制することができる。すなわち、実物に印刷された図形コードが若干不明瞭であったとしても、図形コードから読み取られるデータは劣化しない。これと同様にして、3次元画像に対して描かれた図形コードが若干不明瞭であったとしても、図形コードから読み取られる識別データは劣化しない。したがって、識別データが劣化することを抑制することができる。なお、図形コードとして、バーコードや、2次元コードを採用することができる。
【0025】
第8の手段では、前記図形コードは、誤り訂正機能を有する図形コードである。
【0026】
上記構成によれば、図形コードは、誤り訂正機能を有する図形コードであるため、データ形式の変換に伴って図形コードの画像が劣化し、図形コードから読み取られる識別データの一部に誤りが生じたとしても、識別データの誤りを訂正することができる。すなわち、実物に印刷された図形コードの一部が汚れ等により欠損したとしても、誤り訂正機能により読み取りデータの誤りを訂正することができる。これと同様にして、3次元画像に対して描かれた図形コードの一部がデータ形式の変換に伴って欠損したとしても、誤り訂正機能により識別データの誤りを訂正することができる。
【0027】
要するに、実物に印刷された図形コードが汚れ等に強いという特性を持つのと同様に、3次元画像に対して描かれた図形コードはデータ形式の変換に強いという特性を持つ。したがって、識別データの劣化をより効果的に抑制することができる。なお、誤り訂正機能を有する図形コードとして、QRコード(登録商標)や、データマトリクスコードを採用することができる。
【0028】
第9の手段は、第1〜第8のいずれかの手段のデータ構造から識別データを取得するコンピュータプログラムであって、前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する機能と、前記検索されたデータを解析して前記識別データを取得する機能と、をコンピュータに実現させることを特徴とする。
【0029】
第1〜第8のいずれかの手段のデータ構造では、識別データは、3次元画像の内面に対して描かれる2次元画像のデータとして指定されている。
【0030】
ここで、第9の手段の上記構成によれば、上記データ構造から、3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータが検索される。このため、シミュレーションに用いられるデータの中から、識別データに対応する2次元画像のデータを検索することができる。したがって、検索されたデータを解析することにより、シミュレーション対象を識別する識別データを取得することができる。
【0031】
第10の手段では、第7又は第8の手段のデータ構造から識別データを取得するコンピュータプログラムであって、前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する機能と、前記特定された図形コードを復号して前記識別データを取得する機能と、をコンピュータに実現させることを特徴とする。
【0032】
第7又は第8の手段のデータ構造では、識別データに対応する2次元画像は、識別データを図形コードに変換した2次元画像である。
【0033】
ここで、第10の手段の上記構成によれば、上記データ構造のうち、3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータが解析され、図形コードが特定される。すなわち、3次元画像の内面に対して描かれる2次元画像のデータから、識別データを図形コードに変換した2次元画像のデータが特定される。そして、特定された図形コードを復号することにより、シミュレーション対象を識別する識別データを取得することができる。
【0034】
第11の手段は、第1〜第8のいずれかの手段のデータ構造から識別データを取得するデータ取得装置であって、前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する検索部と、前記検索されたデータを解析して前記識別データを取得する取得部と、を備えることを特徴とする。
【0035】
上記構成によれば、データ取得装置において、第9の手段のコンピュータプログラムと同様の作用効果を奏することができる。
【0036】
第12の手段は、第7又は第8の手段のデータ構造から識別データを取得するデータ取得装置であって、前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する特定部と、前記特定された図形コードを復号して前記識別データを取得する取得部と、を備えることを特徴とする。
【0037】
上記構成によれば、データ取得装置において、第10の手段のコンピュータプログラムと同様の作用効果を奏することができる。
【図面の簡単な説明】
【0038】
【図1】生産ラインのシミュレーション態様を示す図。
【図2】シミュレーション装置及びデータ構造の概要を示す図。
【図3】第1実施形態に係る部品データの構造の概要を示す図。
【図4】QRコードの2次元画像が劣化した状態を示す図。
【図5】QRコードの2次元画像及び表示用テクスチャを描く態様を示す図。
【図6】第2実施形態に係る部品データの構造の概要を示す図。
【図7】QRコードの2次元画像及び表示用テクスチャを描く態様を示す図。
【図8】第3実施形態に係る部品データの構造の概要を示す図。
【図9】QRコードの2次元画像及び表示用テクスチャを描く態様を示す図。
【図10】テキストデータ及びその2次元画像を示す図。
【発明を実施するための形態】
【0039】
(第1実施形態)
以下、第1実施形態について、図面を参照しつつ説明する。本実施形態は、生産ラインの設計段階において、生産ラインでのワークの外観検査をシミュレーションするシミュレーション装置として具体化している。
【0040】
図1は、生産ラインのシミュレーション態様を示す図であり、シミュレーション装置に接続されたモニタの表示する画像を示している。この生産ラインは、ベルトコンベアBC、ロボットRB、カメラC、及び作業台STを備えている。ベルトコンベアBCはワークWを搬送する装置であり、作業台STはワークWを載置する台である。ベルトコンベアBC及び作業台ST(設備)は、設備メーカにより設計される。設備の設計データは、VRML形式のデータとなっており、gif形式のテクスチャデータを含んでいる。ワークWは、製品を構成する部品であり、部品メーカにより設計される。部品の設計データは、DWG形式のデータとなっており、ビットマップ形式のテクスチャデータを含んでいる。ロボットRBは、多関節のアームを備えるロボットであり、アームのハンド部にカメラCが取り付けられている。ロボットRBは、生産ライン設計者により設計される。ロボットRBの設計データは、VRML形式のデータとなっており、ビットマップ形式のテクスチャデータを含んでいる。
【0041】
ワークWの外観検査においては、ベルトコンベアBCによりワークWが搬送され、図示しないロボット等によりワークWが作業台STの上に載置される。そして、ロボットRBは、ワークWの撮影位置までカメラCを移動させ、カメラCによりワークWの外観を撮影させる。その後、撮影により取得されたワークWの画像に基づいて、ワークWの外観が検される。
【0042】
シミュレーション装置は、設備メーカ、部品メーカ、及び生産ライン設計者から提供されるデータを用いて、これらワークWの外観検査の工程をシミュレーションする。その際に、それぞれから提供される設計データは、シミュレーション装置で使用可能なデータ形式(VRML形式)のデータに変換されて用いられる。具体的には、設備メーカから提供されるデータは、データ形式が変換されずにVRML形式のデータとして用いられる。部品メーカから提供されるデータは、DWG形式のデータからVRML形式のデータに変換される。この変換に伴って、部品データに含まれるビットマップ形式のテクスチャデータは、gif形式のテクスチャデータに変換される。生産ライン設計者から提供されるデータは、データ形式が変換されずにVRML形式のデータとして用いられる。なお、上記データ形式の変換は、設備メーカ、部品メーカ、及び生産ライン設計者のいずれが行ってもよい。
【0043】
図2は、シミュレーション装置及びデータ構造の概要を示す図である。
【0044】
設備メーカは、上記ベルトコンベアBC及び作業台ST(設備)を設計しており、それらの仕様を表すデータである設備データ30を有している。設備データ30は、設備形状データ31、テクスチャデータ32、及び設備識別データ33を含んでいる。設備形状データ31はVRML形式のデータであり、テクスチャデータ32及び設備識別データ33はgif形式のデータである。設備形状データ31は、設備(シミュレーション対象)の形状を特定する3次元画像データである。テクスチャデータ32は、シミュレーションの実行時に、設備の3次元画像の表面に貼り付けられる表示用テクスチャ(2次元画像)のデータとして指定されている。一般に、テクスチャデータ32は複数設けられている。設備識別データ33(識別データ)は、設備を識別するテキストデータを、2次元画像のデータとして表したものである。詳しくは、設備識別データ33は、設備の型式や、番号等を識別するテキストデータを、QRコード(図形コード)に変換した2次元画像のデータとして表したものである。設備識別データ33は、シミュレーションの実行時に、設備の3次元画像の表面に貼り付けられるQRコードの2次元画像(QRコード画像)のデータとして指定されている。ここで、設備識別データ33は、設備の3次元画像における同一の面に対して、表示用テクスチャよりも先に描かれるQRコード画像のデータとして指定されている。すなわち、テクスチャデータ32のうちの1つは、QRコード画像の上に重ねて描かれる表示用テクスチャのデータとして指定されている。
【0045】
同様にして、部品メーカは、上記ワークW(部品)を設計しており、その仕様を表すデータである部品データ20を有している。部品データ20は、部品形状データ21、テクスチャデータ22、及び部品識別データ23を含んでいる。部品データ20は、ビットマップ形式のテクスチャデータを含むDWG形式のデータから、gif形式のテクスチャデータを含むVRML形式のデータに変換されたデータである。部品形状データ21はVRML形式のデータであり、テクスチャデータ22及び部品識別データ23はgif形式のデータである。部品形状データ21は、部品(シミュレーション対象)の形状を特定する3次元画像データである。テクスチャデータ22は、シミュレーションの実行時に、部品の3次元画像の表面に貼り付けられる表示用テクスチャのデータとして指定されている。一般に、テクスチャデータ22は複数設けられている。部品識別データ23(識別データ)は、部品を識別するテキストデータを、2次元画像のデータとして表したものである。詳しくは、部品識別データ23は、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像のデータとして表したものである。部品識別データ23は、シミュレーションの実行時に、部品の3次元画像の表面に貼り付けられるQRコードの2次元画像(QRコード画像)のデータとして指定されている。ここで、部品識別データ23は、部品の3次元画像における同一の面に対して、表示用テクスチャよりも先に描かれるQRコード画像のデータとして指定されている。すなわち、テクスチャデータ22のうちの1つは、QRコード画像の上に重ねて描かれる表示用テクスチャのデータとして指定されている。
【0046】
また同様にして、生産ライン設計者は、上記ロボットRBを設計しており、その仕様を表すデータであるロボットデータ40を有している。ロボットデータ40は、ロボット形状データ41、テクスチャデータ42、及びロボット識別データ43を含んでいる。ロボット形状データ41はVRML形式のデータであり、テクスチャデータ32及び設備識別データ33はビットマップ形式のデータである。ロボット形状データ41は、ロボット(シミュレーション対象)の形状を特定する3次元画像データである。テクスチャデータ42は、シミュレーションの実行時に、ロボットの3次元画像の表面に貼り付けられる表示用テクスチャのデータとして指定されている。一般に、テクスチャデータ42は複数設けられている。ロボット識別データ43(識別データ)は、ロボットを識別するテキストデータを、2次元画像のデータとして表したものである。詳しくは、ロボット識別データ43は、ロボットの型式や、番号等を識別するテキストデータを、QRコードに変換した2次元画像のデータとして表したものである。ロボット識別データ43は、シミュレーションの実行時に、ロボットの3次元画像の表面に貼り付けられるQRコードの2次元画像(QRコード画像)のデータとして指定されている。ここで、ロボット識別データ43は、ロボットの3次元画像における同一の面に対して、表示用テクスチャよりも先に描かれるQRコード画像のデータとして指定されている。すなわち、テクスチャデータ42のうちの1つは、QRコード画像の上に重ねて描かれる表示用テクスチャのデータとして指定されている。
【0047】
ここで、シミュレーションに用いられる上記データの具体例について説明する。図3は、上記部品データ20の構造の概要を示す図である。ここでは、部品の形状等を簡略化して説明する。
【0048】
同図に示すように、部品の形状は「BOX」(直方体)に指定されており、x,y,z方向における各辺の長さはそれぞれ1,2,3に設定されている。部品の表面に2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“QRcode.gif”という名前のgif形式のデータとなっている。“QRcode.gif”のデータは、上記部品識別データ23に相当し、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータである。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(1/0.5)に指定されている。その後、同一の「BOX」の表面(同一の面)に、別の2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“surface.gif”という名前のgif形式のデータとなっている。“surface.gif”のデータは、上記テクスチャデータ22に相当し、部品の外観検査等で用いられる表示用テクスチャのデータである。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(1/0.5)に指定されている。
【0049】
また、設備データ30では、上記部品に代えて設備について設定されており、データの基本的な構造は部品データ20と同様である。すなわち、設備の形状が設定されるとともに、設備の表面に2次元画像をテクスチャとして貼り付けることが指定されている。設備データ30は、テクスチャのデータとして、上記設備識別データ33に相当するデータと、上記テクスチャデータ32に相当するデータとを備えている。設備識別データ33に相当するデータは、設備の型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、gif形式のデータとなっている。テクスチャデータ32に相当するデータは、設備における同一の面に対して、QRコード画像を貼り付けた後に貼り付ける2次元画像のデータとして指定されており、gif形式のデータとなっている。
【0050】
また、ロボットデータ40では、上記部品に代えてロボットについて設定されており、データの基本的な構造は部品データ20と同様である。すなわち、ロボットの形状が設定されるとともに、ロボットの表面に2次元画像をテクスチャとして貼り付けることが指定されている。ロボットデータ40は、テクスチャのデータとして、上記ロボット識別データ43に相当するデータと、上記テクスチャデータ42に相当するデータとを備えている。ロボット識別データ43に相当するデータは、ロボットの型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、ここではビットマップ形式のデータとなっている。テクスチャデータ42に相当するデータは、ロボットにおける同一の面に対して、QRコード画像を貼り付けた後に貼り付ける2次元画像のデータとして指定されており、ここではビットマップ形式のデータとなっている。
【0051】
図4は、QRコードの2次元画像(QRコード画像)が劣化した状態を示す図である。生産ライン設計者から設備メーカに提供されたQRコード画像のビットマップ形式のデータが、設備メーカによりgif形式やjpg形式のデータに変換された場合にQRコード画像の劣化が生じる。また、部品メーカの有する部品のDWG形式等の設計データが、生産ライン設計者によりVRM形式等のデータに変換されたことに伴って、部品の設計データに含まれるQRコード画像のビットマップ形式のデータが、gif形式等のデータに変換された場合にQRコード画像の劣化が生じる。
【0052】
同図に示すように、ビットマップ形式のデータで特定されるQRコード画像Q1では、光学的特性の異なる2種類(白及び黒)のセルは、それぞれ正確な正方形として表示されている。これに対して、gif形式等のデータで特定されるQRコード画像Q2では、光学的特性の異なる2種類のセルは、それぞれ一部の形状が崩れた状態で表示されている。黒のセルでは、一部に欠けLが生じており、白のセルでは、一部に汚れDが生じている。
【0053】
QRコード画像の読み取りにおいては、QRコード画像Q2の一部に欠けLや汚れDが生じたとしても、画像の解析によりQRコード画像Q2が表すQRコードを特定することができる。そして、QRコードを復号することにより、QRコード画像Q1から取得されるデータと同一のデータを、QRコード画像Q2から取得することができる。すなわち、QRコード画像Q2の一部に欠けLや汚れDがあったとしても、QRコード画像Q2から読み取られるデータは劣化しない。さらに、QRコードは誤り訂正機能を有しているため、取得されたデータの一部に誤りが生じた場合には、その誤りを訂正することができる。
【0054】
図2に戻り、シミュレーション装置10(データ取得装置)は、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を備えている。これらは、演算装置や、記憶装置、入出力インターフェース等により構成されている。
【0055】
データ検索部11(検索部)は、部品メーカ、設備メーカ、及び生産ライン設計者から、部品データ20、設備データ30、及びロボットデータ40をそれぞれ入力して、それぞれのデータの中から特定のデータを検索する。詳しくは、データ検索部11は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における同一の面に対して描かれる画像のデータを検索する。図3に示す例に対しては、データ検索部11は、部品の3次元画像の表面に貼り付けられる2次元画像(テクスチャ)のデータとして指定されているデータから、同一の「BOX」の表面(同一の面)に対して描かれる2次元画像のデータとして指定されているデータを検索する。そして、“QRcode.gif”のデータ及び“surface.gif”のデータが検索される。
【0056】
コード特定部12(特定部)は、データ検索部11から上記検索されたデータを読み込み、そのデータを解析してQRコードを特定する。詳しくは、データ検索部11により検索されたデータには、それぞれ識別データ23,33,43(QRコード画像のデータ)が含まれている。このため、QRコード画像のデータをそれぞれ解析して、QRコード画像が表すQRコードをそれぞれ特定する。図3に示す例に対しては、“QRcode.gif”のデータ及び“surface.gif”のデータが解析され、“QRcode.gif”のデータからQRコード画像、ひいてはQRコードが特定される。ここで、“QRcode.gif”のデータはgif形式のデータであるため、QRコード画像の一部に欠けLや汚れDが生じることとなるが、画像の解析によりQRコード画像が表すQRコードを特定することができる。また、設備データ30において、設備識別データ33に相当するデータを解析する場合も同様である。なお、ロボットデータ40において、ロボット識別データ43に相当するデータはビットマップ形式のデータであるため、ロボット識別データ43に相当するデータを解析する場合は、QRコード画像に欠けLや汚れDは生じていない。
【0057】
識別データ取得部13(取得部)は、コード特定部12から上記特定されたQRコードを読み込み、QRコードを復号してシミュレーション対象を識別するテキストデータを取得する。ここで、コード特定部12により特定されたQRコードに誤りが存在しなかった場合には、識別データ23,33,43から、シミュレーション対象を識別する適切なテキストデータがそれぞれ取得される。また、コード特定部12により特定されたQRコードの一部に誤りが存在した場合であっても、QRコードの誤り訂正機能によりその誤りが訂正される。
【0058】
制御部14は、識別データ取得部13から上記取得されたテキストデータを読み込み、そのテキストデータによりシミュレーション対象を識別した結果を用いて、部品の外観検査の工程をシミュレーションする。そして、制御部14は、シミュレーションの結果をモニタ15(表示装置)に表示させる。ここで、図5に示すように、QRコード画像Qがシミュレーション対象の面S1に貼り付けられた直後に、同一の面S1に表示用テクスチャTTが貼り付けられる。このため、シミュレーションの実行時に、QRコード画像Qは外観上表示されることはなく、QRコード画像Qと表示用テクスチャTTとがちらつくことを抑制することができる。したがって、識別データ23,33,43を有するデータ20,30,40を用いて、識別データ23,33,43を有しないデータと同様にシミュレーションを行うことができる。
【0059】
以上詳述した本実施形態は以下の利点を有する。
【0060】
・データ20,30,40は、シミュレーション対象を識別するデータである識別データ23,33,43をそれぞれ備えている。識別データ23,33,43は、形状データ21,31,41により特定される3次元画像に対してそれぞれ描かれるテクスチャ(2次元画像)のデータとして指定されている。このため、一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、シミュレーションに用いられるデータの一部であるテクスチャのデータとして、3次元画像データに識別データ23,33,43を付与することができる。さらに、データ20,30,40のうち識別データ23,33,43に対応する2次元画像のデータをそれぞれ特定し、その2次元画像を解析することにより、シミュレーション対象を識別するテキストデータを取得することができる。このため、データの形式が変換された場合に、識別データ23,33,43に対応する2次元画像が劣化するおそれはあるものの、2次元画像に基づいて取得される識別データとしてのテキストデータが欠損することを抑制することができる。
【0061】
・シミュレーションの実行時に、形状データ21,31,41により特定される3次元画像に対して、識別データ23,33,43に対応するQRコード画像がそれぞれ描かれ、そのQRコード画像の上に重ねて表示用テクスチャが描かれる。このため、識別データ23,33,43に対応するQRコード画像が外観上表示されることはなく、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことができる。
【0062】
・識別データ23,33,43に対応するQRコード画像のデータと表示用テクスチャのデータとは、形状データ21,31,41により特定される3次元画像における同一の面に対してそれぞれ描かれる画像のデータとして指定されている。こうした構成によれば、シミュレーション対象の3次元画像に新たな面を設ける必要がなく、表示用テクスチャと同様にして、元々の3次元画像に対して識別データ23,33,43に対応するQRコード画像を描くことができる。
【0063】
・識別データ23,33,43に対応するQRコード画像のデータは、表示用テクスチャよりも先に描かれる画像のデータとして指定されている。こうした構成によれば、シミュレーションの実行時に形状データ21,31,41により特定される3次元画像の同一の面に対して、識別データ23,33,43に対応するQRコード画像がそれぞれ描かれた後に表示用テクスチャが描かれる。このため、形状データ21,31,41により特定される3次元画像を表示する際に、識別データ23,33,43に対応するQRコード画像と表示用テクスチャとがちらつくことを抑制することができる。
【0064】
・識別データ23,33,43に対応する2次元画像は、識別データ23,33,43をそれぞれQRコードに変換した2次元画像であるため、データ形式の変換に伴ってQRコードの画像が劣化したとしても、QRコードに基づいて取得される識別データとしてのテキストデータの劣化を抑制することができる。すなわち、実物に印刷されたQRコードが若干不明瞭であったとしても、QRコードから読み取られるデータは劣化しない。これと同様にして、形状データ21,31,41により特定される3次元画像に対して描かれたQRコードが若干不明瞭であったとしても、QRコードから読み取られる識別データとしてのテキストデータは劣化しない。
【0065】
・QRコードは、誤り訂正機能を有する図形コードであるため、データ形式の変換に伴ってQRコードの画像が劣化し、QRコードから読み取られるデータの一部に誤りが生じたとしても、データの誤りを訂正することができる。すなわち、実物に印刷されたQRコードの一部が汚れ等により欠損したとしても、誤り訂正機能により読み取りデータの誤りを訂正することができる。これと同様にして、形状データ21,31,41により特定される3次元画像に対して描かれたQRコードの一部がデータ形式の変換に伴って欠損したとしても、誤り訂正機能により識別データとしてのテキストデータの誤りを訂正することができる。要するに、実物に印刷されたQRコードが汚れ等に強いという特性を持つのと同様に、3次元画像に対して描かれたQRコードはデータ形式の変換に強いという特性を持つ。したがって、識別データとしてのテキストデータの劣化をより効果的に抑制することができる。
【0066】
・データ検索部11により、データ20,30,40から、形状データ21,31,41により特定される3次元画像における同一の面に描かれる画像のデータとして指定されているデータがそれぞれ検索される。このため、データ20,30,40の中から、識別データ23,33,43に対応する2次元画像のデータをそれぞれ検索することができる。
【0067】
・コード特定部12により、データ20,30,40のうち、形状データ21,31,41により特定される3次元画像に対して描かれるQRコード画像のデータとして指定されているデータがそれぞれ解析され、QRコードが特定される。すなわち、形状データ21,31,41により特定される3次元画像に対して描かれるQRコード画像のデータから、識別データ23,33,43をQRコードに変換した2次元画像のデータがそれぞれ特定される。そして、識別データ取得部13により、コード特定部12で特定されたQRコードを復号することにより、シミュレーション対象を識別する識別データとしてのテキストデータを取得することができる。
【0068】
なお、本実施形態を、以下のように変形して実施することもできる。
【0069】
・シミュレーション装置10において、3次元画像に対して下に描かれるテクスチャと上に描かれるテクスチャとを指定することができる場合には、識別データ23,33,43に対応するQRコード画像を下に描かれるテクスチャとして指定し、表示用テクスチャを上に描かれるテクスチャとして指定してもよい。こうした構成によれば、シミュレーションの実行時に3次元画像の同一の面において、識別データ23,33,43に対応するQRコード画像の上に重ねて表示用テクスチャが描かれる。このため、シミュレーション対象の3次元画像を表示する際に、QRコード元画像と表示用テクスチャとがちらつくことを抑制することができる。
【0070】
・上記実施形態では、データ検索部11が、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における同一の面に対して描かれる画像のデータを検索した後に、コード特定部12が、検索されたデータを解析してQRコードを特定した。しかしながら、コード特定部12(特定部)が、各データ20,30,40のうち、3次元画像に対して描かれるテクスチャのデータとして指定されているデータを全て解析して、QRコードを特定することもできる。その場合には、シミュレーションに支障がなければ、表示用テクスチャの描かれていない面にQRコード画像を表示してもよい。
【0071】
・シミュレーションに支障がなければ、表示用テクスチャの上に重ねてQRコード画像を描いたり、表示用テクスチャを省略してQRコード画像を描いたりすることもできる。
【0072】
(第2実施形態)
第1実施形態では、識別データ23,33,43に対応するQRコード画像が外観上表示されないようにするために、QRコード画像の上に重ねて表示用テクスチャを描くようにした。これに対して、第2実施形態では、形状データ21,31,41により特定される3次元画像の内面に、識別データ23,33,43に対応するQRコード画像をそれぞれ描くようにしている。その他の点は、第1実施形態と同様であるため、以下、第1実施形態との相違点を中心に説明する。
【0073】
図6は、上記部品データ20の構造の概要を示す図である。ここでは、部品の形状等を簡略化して説明する。
【0074】
同図に示すように、部品の形状は「BOX」(直方体)に指定されており、x,y,z方向における各辺の長さはそれぞれ1,2,3に設定されている。
【0075】
原点を「BOX」の中心としてx方向に垂直な面の位置−0.5(x方向)に対して、その内側で近傍となる位置、すなわちx方向に−0.49、y方向に0、及びz方向に0の位置が、QRコード画像を貼り付ける平面の基準座標として設定されている。その基準座標において、この平面は、z軸回りに90°(1.57rad)回転させられ、x方向に垂直な面と平行になるように設定されている。この面は、x方向のメッシュ数が2、z方向のメッシュ数2、高さが0に設定されている。
【0076】
そして、平面の表面(部品の内面)に2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“QRcode.gif”という名前のgif形式のデータとなっている。“QRcode.gif”のデータは、上記部品識別データ23に相当し、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータである。テクスチャとしてのQRコード画像は、繰り返し数、及び表示スケールが省略されている。
【0077】
ここでは記載していないが、第1実施形態と同様にして、部品データ20では、同一の「BOX」の表面(部品の外面)に、別の2次元画像をテクスチャとして貼り付けることが指定されている。この2次元画像のデータは“surface.gif”という名前のgif形式のデータとなっている。“surface.gif”のデータは、上記テクスチャデータ22に相当し、部品の外観検査等で用いられる表示用テクスチャのデータである。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(1/0.5)に指定されている。
【0078】
また、設備データ30では、上記部品に代えて設備について設定されており、データの基本的な構造は部品データ20と同様である。すなわち、設備の形状が設定されるとともに、設備の内面と外面とに2次元画像をテクスチャとして貼り付けることが指定されている。設備データ30は、テクスチャのデータとして、上記設備識別データ33に相当するデータ(設備の内面に貼り付ける画像のデータ)と、上記テクスチャデータ32に相当するデータ(設備の外面に貼り付ける画像のデータ)とを備えている。設備識別データ33に相当するデータは、設備の型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、gif形式のデータとなっている。テクスチャデータ32に相当するデータは、設備の外面に対して貼り付ける2次元画像のデータとして指定されており、gif形式のデータとなっている。
【0079】
また、ロボットデータ40では、上記部品に代えてロボットについて設定されており、データの基本的な構造は部品データ20と同様である。すなわち、ロボットの形状が設定されるとともに、ロボットの内面と外面とに2次元画像をテクスチャとして貼り付けることが指定されている。ロボットデータ40は、テクスチャのデータとして、上記ロボット識別データ43に相当するデータ(設備の内面に貼り付ける画像のデータ)と、上記テクスチャデータ42に相当するデータ(設備の外面に貼り付ける画像のデータ)とを備えている。ロボット識別データ43に相当するデータは、ロボットの型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、ここではビットマップ形式のデータとなっている。テクスチャデータ42に相当するデータは、ロボットの外面に対して貼り付ける2次元画像のデータとして指定されており、ここではビットマップ形式のデータとなっている。
【0080】
図2に示したように、シミュレーション装置10(データ取得装置)は、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を備えている。これらは、演算装置や、記憶装置、入出力インターフェース等により構成されている。
【0081】
データ検索部11(検索部)は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における内部の面(内側の面)に対して描かれる画像のデータを検索する。図6に示す例に対しては、データ検索部11は、部品の3次元画像の表面に貼り付けられる2次元画像(テクスチャ)のデータとして指定されているデータから、「BOX」の内部に作成された平面に対して描かれる2次元画像のデータとして指定されているデータを検索する。そして、“QRcode.gif”のデータが検索される。
【0082】
コード特定部12(特定部)は、第1実施形態と同様に、データ検索部11から上記検索されたデータを読み込み、そのデータを解析してQRコードを特定する。図6に示す例に対しては、“QRcode.gif”のデータが解析され、“QRcode.gif”のデータからQRコード画像、ひいてはQRコードが特定される。
【0083】
識別データ取得部13(取得部)は、第1実施形態と同様に、コード特定部12から上記特定されたQRコードを読み込み、QRコードを復号してシミュレーション対象を識別するテキストデータを取得する。ここで、コード特定部12により特定されたQRコードの一部に誤りが存在した場合であっても、QRコードの誤り訂正機能によりその誤りが訂正される。
【0084】
制御部14は、第1実施形態と同様に、識別データ取得部13から上記取得されたテキストデータを読み込み、そのテキストデータによりシミュレーション対象を識別した結果を用いて、部品の外観検査の工程をシミュレーションする。そして、制御部14は、シミュレーションの結果をモニタ15(表示装置)に表示させる。ここで、図7に示すように、QRコード画像Qは、シミュレーション対象の内部に作成された平面S3に貼り付けられている。表示を一部省略しているが、シミュレーション対象の表面S2等(外面)には、表示用テクスチャTTが貼り付けられている。このため、シミュレーションの実行時に、QRコード画像Qは外観上表示されることはなく、QRコード画像Qと表示用テクスチャTTとがちらつくことを抑制することができる。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しないデータと同様にシミュレーションを行うことができる。
【0085】
以上詳述した本実施形態は以下の利点を有する。ここでは、第1実施形態と相違する利点のみを述べる。
【0086】
・識別データ23,33,43は、形状データ21,31,41により特定される3次元画像の内部に作成された平面 (内側の面)に対してそれぞれ描かれるテクスチャ(2次元画像)のデータとして指定されている。このため、シミュレーションの実行時に、識別データ23,33,43に対応する2次元画像は3次元画像の内側に描かれ、外観上表示されることが抑制される。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことができる。
【0087】
・シミュレーション対象の内部に平面を作成して、その平面に識別データ23,33,43に対応するQRコード画像をそれぞれ貼り付けている。このため、シミュレーション装置10において、形状データ21,31,41により特定される3次元画像における同一の面に対して、内側と外側とにテクスチャを貼り付けることができない場合であっても、QRコード画像を3次元画像の内側に描くことができる。
【0088】
・データ検索部11により、データ20,30,40から、形状データ21,31,41により特定される3次元画像の内側の面に対して描かれる2次元画像のデータとして指定されているデータがそれぞれ検索される。このため、データ20,30,40の中から、識別データ23,33,43に対応する2次元画像のデータをそれぞれ検索することができる。
【0089】
なお、本実施形態を、以下のように変形して実施することもできる。
【0090】
・シミュレーション装置10において、形状データ21,31,41により特定される3次元画像における同一の面に対して、内側と外側とにテクスチャを貼り付けることができる場合には、以下のように実施することもできる。すなわち、識別データ23,33,43とテクスチャデータ22,32,42とを、3次元画像における同一の面に対して内面と外面とにそれぞれ描かれる画像のデータとして指定する。こうした構成によれば、識別データ23,33,43に対応するQRコード画像が表示用テクスチャにより覆われ、外観上表示されることが抑制される。さらに、シミュレーション対象の3次元画像に新たな面を設ける必要がなく、表示用テクスチャと同様にして、元々の3次元画像に対して識別データ23,33,43に対応するQRコード画像を描くことができる。この場合には、図7に示すように、QRコード画像Qと表示用テクスチャTTとについて、3次元画像に対して画像を描く向きを示す法線ベクトルn1,n2を互いに逆向きに指定するとよい。
【0091】
・シミュレーションに支障がなければ、表示用テクスチャの描かれない面の内側にQRコード画像を描いたり、3次元画像の外面に描かれる表示用テクスチャを省略して、3次元画像の内部に作成された平面又は3次元画像の内面に、QRコード画像を描いたりすることもできる。
【0092】
・上記実施形態では、データ検索部11は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像における内部の面(内側の面)に対して描かれる画像のデータを検索した後に、コード特定部12が、検索されたデータを解析してQRコードを特定した。しかしながら、コード特定部12(特定部)が、各データ20,30,40のうち、3次元画像における内部の面に対して描かれるテクスチャのデータとして指定されているデータを全て解析して、QRコードを特定することもできる。
【0093】
・上記実施形態では、シミュレーション装置10のデータ検索部11が、各データ20,30,40から、3次元画像における内部の面に対して描かれるQRコード画像のデータを検索した。しかしながら、検索された画像のデータを解析するのではなく、作業者がモニタ15において3次元画像を見ながら、識別データ23,33,43に対応するQRコード画像を探すこともできる。この場合には、データ20,30,40の構造を以下のようにするとよい。
【0094】
すなわち、識別データ23,33,43に対応するQRコード画像のデータを、3次元画像の内面を所定方向から撮影した場合に表示される画像のデータとして指定する。例えば、部品の形状を「BOX」(直方体)に指定し、x,y,z方向における各辺の長さをそれぞれ1,2,3に設定したとする。原点を「BOX」の中心としてz方向に垂直な面の位置1.5(z方向)に対して、その内側で近傍となる位置、すなわちx方向に0、y方向に0、及びz方向に1.49の位置を、QRコード画像を貼り付ける平面の基準座標として設定する。その基準座標において、この平面を、z方向に垂直な面と平行になるように回転させるように設定する。そして、この平面にQRコード画像を貼り付けるように設定する。こうした構成によれば、シミュレーションの実行時に、3次元画像の内面をz方向の負から正側へ撮影することにより、識別データ23,33,43に対応するQRコード画像が表示される。このため、識別データ23,33,43に対応するQRコード画像を容易に探すことができる。
【0095】
また上記例によれば、識別データ23,33,43は、3次元画像の内面を撮影した場合に、識別データ23,33,43に対応するQRコード画像の描かれる位置(0,0,1.49)と撮影位置(0,0,0)との距離が、1.0(所定距離)よりも長くなる内面に描かれる画像のデータとして指定されている。こうした構成によれば、シミュレーションの実行時に、3次元画像の内面を撮影した場合に、QRコード画像と撮影位置との距離を確保することができ、QRコード画像を適切に表示することができる。したがって、識別データ23,33,43に対応するQRコード画像を容易に探すことができる。
【0096】
(第3実施形態)
第1実施形態では、識別データ23,33,43に対応するQRコード画像が外観上表示されないようにするために、QRコード画像の上に重ねて表示用テクスチャを描くようにした。これに対して、第3実施形態では、形状データ21,31,41により特定される3次元画像に対して、それぞれ識別データ23,33,43に対応するQRコード画像を、外観上無視することのできる大きさで描くようにしている。その他の点は、第1実施形態と同様であるため、以下、第1実施形態との相違点を中心に説明する。
【0097】
図8は、上記部品データ20の構造の概要を示す図である。ここでは、部品の形状等を簡略化して説明する。
【0098】
同図に示すように、部品の形状は「BOX」(直方体)に指定されており、x,y,z方向における各辺の長さはそれぞれ1,2,3に設定されている。部品の表面に2次元画像をテクスチャとして貼り付けることが指定されており、この2次元画像のデータは“QRcode.gif”という名前のgif形式のデータとなっている。“QRcode.gif”のデータは、上記部品識別データ23に相当し、部品の製造番号や、素材、重量等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータである。このテクスチャを貼り付ける際に、表示スケールはx方向及びy方向共に1/2000倍(第2倍率)に指定されている。これにより、シミュレーションの実行時に、QRコード画像は部品の3次元画像に対して外観上無視することのできる大きさで描かれ、また部品が移動される際の最小移動量と比較して1000分の1未満の大きさで描かれる。なお、テクスチャとしてのQRコード画像は、繰り返し数が省略されている。
【0099】
ここでは記載していないが、第1実施形態と同様にして、部品データ20では、同一の「BOX」の表面(同一の面)に、別の2次元画像をテクスチャとして貼り付けることが指定されている。この2次元画像のデータは“surface.gif”という名前のgif形式のデータとなっている。“surface.gif”のデータは、上記テクスチャデータ22に相当し、部品の外観検査等で用いられる表示用テクスチャのデータである。この表示用テクスチャは、上記QRコード画像よりも先に、部品の表面に貼り付けられる。このテクスチャを貼り付ける際に、繰り返しは無しに設定され、表示スケールはx方向及びy方向共に2倍(第1倍率)に指定されている。したがって、部品の3次元画像に対して、QRコード画像は表示用テクスチャよりも小さい倍率で描かれる。
【0100】
また、設備データ30では、上記部品に代えて設備について設定されており、データの基本的な構造は部品データ20と同様である。すなわち、設備の形状が設定されるとともに、設備の表面に2次元画像をテクスチャとして貼り付けることが指定されている。設備データ30は、テクスチャのデータとして、上記設備識別データ33に相当するデータと、上記テクスチャデータ32に相当するデータとを備えている。設備識別データ33に相当するデータは、設備の型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、gif形式のデータとなっている。テクスチャデータ32に相当するデータは、設備における同一の面に対してQRコード画像よりも先に貼り付ける2次元画像のデータとして指定されており、gif形式のデータとなっている。
【0101】
また、ロボットデータ40では、上記部品に代えてロボットについて設定されており、データの基本的な構造は部品データ20と同様である。すなわち、ロボットの形状が設定されるとともに、ロボットの表面に2次元画像をテクスチャとして貼り付けることが指定されている。ロボットデータ40は、テクスチャのデータとして、上記ロボット識別データ43に相当するデータと、上記テクスチャデータ42に相当するデータとを備えている。ロボット識別データ43に相当するデータは、ロボットの型式や番号等を識別するテキストデータを、QRコードに変換した2次元画像(QRコード画像)のデータであり、ここではビットマップ形式のデータとなっている。テクスチャデータ42に相当するデータは、ロボットにおける同一の面に対してQRコード画像よりも先に貼り付ける2次元画像のデータとして指定されており、ここではビットマップ形式のデータとなっている。
【0102】
図2に示したように、シミュレーション装置10(データ取得装置)は、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を備えている。これらは、演算装置や、記憶装置、入出力インターフェース等により構成されている。
【0103】
データ検索部11(検索部)は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像に対して、最も小さい倍率で描かれる画像のデータとして指定されているデータを検索する。図8に示す例に対しては、データ検索部11は、部品の3次元画像の表面に貼り付けられる2次元画像(テクスチャ)のデータとして指定されているデータから、最も小さい倍率で描かれる2次元画像のデータとして指定されているデータを検索する。そして、“QRcode.gif”のデータが検索される。なお、データ検索部11が、部品の3次元画像の表面に貼り付けられる2次元画像のデータとして指定されているデータから、所定倍率(例えば1/100倍率)よりも小さい倍率で描かれる2次元画像のデータとして指定されているデータを検索するようにしてもよい。
【0104】
コード特定部12(特定部)は、第1実施形態と同様に、データ検索部11から上記検索されたデータを読み込み、そのデータを解析してQRコードを特定する。図8に示す例に対しては、“QRcode.gif”のデータが解析され、“QRcode.gif”のデータからQRコード画像、ひいてはQRコードが特定される。
【0105】
識別データ取得部13(取得部)は、第1実施形態と同様に、コード特定部12から上記特定されたQRコードを読み込み、QRコードを復号してシミュレーション対象を識別するテキストデータを取得する。ここで、コード特定部12により特定されたQRコードの一部に誤りが存在した場合であっても、QRコードの誤り訂正機能によりその誤りが訂正される。
【0106】
制御部14は、第1実施形態と同様に、識別データ取得部13から上記取得されたテキストデータを読み込み、そのテキストデータによりシミュレーション対象を識別した結果を用いて、部品の外観検査の工程をシミュレーションする。そして、制御部14は、シミュレーションの結果をモニタ15(表示装置)に表示させる。ここで、図9に示すように、QRコード画像Qは、シミュレーション対象の面S4に対して、表示用テクスチャTTの上に重ねて外観上無視することのできる大きさで描かれている。このため、シミュレーションの実行時に、QRコード画像Qは極小の点として表示される。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しないデータと同様にシミュレーションを行うことができる。
【0107】
以上詳述した本実施形態は以下の利点を有する。ここでは、第1実施形態と相違する利点のみを述べる。
【0108】
・シミュレーションの実行時に、識別データ23,33,43に対応するQRコード画像は、それぞれ形状データ21,31,41により特定される3次元画像に対して、表示用テクスチャを描く倍率である第1倍率(2倍)よりも小さい第2倍率(1/2000倍)で描かれる。すなわち、QRコード画像は、シミュレーション対象の3次元画像に対して、外観上無視することのできる大きさで描かれ、極小の点として表示される。このため、QRコード元画像が、シミュレーション対象の外観に影響を与えることを微小にすることができる。したがって、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことが可能となる。
【0109】
・QRコード画像は、シミュレーション対象の3次元画像に対して、外観上無視することのできる大きさで描かれるため、表示用テクスチャの上に重ねてQRコード画像を描くことができる。
【0110】
・データ検索部11により、データ20,30,40から、形状データ21,31,41により特定される3次元画像に対して最も小さい倍率で描かれる画像のデータとして指定されているデータがそれぞれ検索される。このため、データ20,30,40の中から、識別データ23,33,43に対応する2次元画像のデータをそれぞれ検索することができる。なお、データ検索部11により、データ20,30,40から、3次元画像に対して所定倍率(例えば1/100倍率)よりも小さい倍率で描かれる画像のデータとして指定されているデータを検索するようにしても同様である。
【0111】
なお、本実施形態を、以下のように変形して実施することもできる。
【0112】
・上記実施形態では、データ検索部11は、各データ20,30,40から、それぞれの形状データ21,31,41の特定する3次元画像に対して、最も小さい倍率で描かれる画像のデータとして指定されているデータを検索した後に、コード特定部12が、検索されたデータを解析してQRコードを特定した。しかしながら、コード特定部12(特定部)が、各データ20,30,40のうち、3次元画像に対して描かれるテクスチャのデータとして指定されているデータを全て解析して、QRコードを特定することもできる。
【0113】
・上記実施形態では、シミュレーション装置10のデータ検索部11が、各データ20,30,40から、3次元画像に対して、最も小さい倍率で描かれる画像のデータとして指定されているデータを検索した。しかしながら、検索された画像のデータを解析するのではなく、作業者がモニタ15において3次元画像を見ながら、識別データ23,33,43に対応するQRコード画像を探すこともできる。この場合には、データ20,30,40の構造を以下のようにするとよい。
【0114】
すなわち、識別データ23,33,43に対応するQRコード画像のデータを、基準位置において3次元画像を所定方向から撮影した場合に表示される画像のデータとして指定する。例えば、部品の形状を「BOX」(直方体)に指定し、x,y,z方向における各辺の長さをそれぞれ1,2,3に設定したとする。この場合には、部品のz方向に垂直な面の表面にQRコード画像を貼り付けるように指定する。こうした構成によれば、シミュレーションの実行時に、例えば基準位置(0,0,4)において3次元画像をz方向の正から負側へ撮影することにより、識別データ23,33,43に対応するQRコード画像が表示される。そして、QRコード画像を、例えば表示スケールの逆数倍して表示させることにより、QRコード画像を適切な大きさで表示させることができる。このため、識別データ23,33,43に対応するQRコード画像を容易に探すことができる。
【0115】
なお、上記の各実施形態を、以下のように変形して実施することもできる。
【0116】
・作業台STの設計を生産ライン設計者が行ったり、ロボットRBの設計をロボットメーカが行ったりしてもよい。要するに、それら作業台ST及びロボットRBのデータが、シミュレーション装置10に提供されればよい。
【0117】
・誤り訂正機能を有する図形コードとして、QRコードに代えてデータマトリクスコードを採用することもできる。また、QRコードに代えて、誤り訂正機能を有しない図形コードを採用することもでき、その他の2次元コードや、バーコードを採用することもできる。これらの場合であっても、データ形式の変換に伴って図形コードの画像が劣化したとしても、図形コードに基づいて取得される識別データとしてのテキストデータの劣化を抑制することができる。
【0118】
・識別データ23,33,43をQRコード画像のデータとし、シミュレーションの実行時に、3次元画像の表面に無色で貼り付けられる表示用テクスチャのデータとして指定してもよい。こうした構成によれば、シミュレーションの実行時に、識別データ23,33,43に対応するQRコード画像は無色で描かれるため、シミュレーションに影響を与えることを防止することができる。その結果、識別データ23,33,43をそれぞれ有するデータ20,30,40を用いて、識別データ23,33,43を有しない3次元画像データと同様にシミュレーションを行うことができる。
【0119】
・シミュレーション装置10において、データ検索部11、コード特定部12、識別データ取得部13、及び制御部14を、コンピュータプログラムの機能としてそれぞれ実現することもできる。その場合には、コンピュータプログラムの記録された媒体を、シミュレーション装置10(コンピュータ)により読み込み、そのコンピュータプログラム(方法)を実行するとよい。
【0120】
・図10に示すように、テクスチャとしての識別データ23,33,43が、シミュレーション対象を識別するテキストデータTXを、テキスト(文字)の2次元画像IMとして表すようにすることもできる。そして、2次元画像IMをOCR(Optical Character Recognition)等で解析することにより、テキストデータTXを取得することができる。この場合であっても、シミュレーションに用いられるデータ20,30,40の一部である2次元画像のデータとして、データ20,30,40にそれぞれ識別データ23,33,43を付与することができる。さらに、データの形式が変換された場合に、識別データ23,33,43に対応する2次元画像IMが劣化するおそれはあるものの、2次元画像IMに基づいて取得される識別データとしてのテキストデータTXが欠損することを抑制することができる。
【符号の説明】
【0121】
10…シミュレーション装置(データ取得装置、コンピュータ)、15…モニタ、20…部品データ、21…部品形状データ(3次元画像データ)、22…テクスチャデータ、23…部品識別データ(識別データ)、30…設備データ、31…設備形状データ(3次元画像データ)、32…テクスチャデータ、33…設備識別データ(識別データ)、40…ロボットデータ、41…ロボット形状データ(3次元画像データ)、42…テクスチャデータ、43…ロボット識別データ(識別データ)。
【特許請求の範囲】
【請求項1】
生産ラインのシミュレーションに用いられるデータの構造であって、
シミュレーション対象の3次元画像を特定する3次元画像データと、
前記シミュレーションの実行時に表示される表示用テクスチャのデータと、
前記シミュレーション対象を識別するデータである識別データと、を備え、
前記表示用テクスチャのデータは、前記3次元画像の外面に対して描かれる画像のデータとして指定され、
前記識別データは、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されていることを特徴とするデータ構造。
【請求項2】
前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像における同一の面に対して描かれる画像のデータとして指定されている請求項1に記載のデータ構造。
【請求項3】
前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像に対して画像を描く向きを示す法線ベクトルが互いに反対向きに指定されている請求項1又は2に記載のデータ構造。
【請求項4】
前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を所定方向から撮影した場合に表示される画像のデータとして指定されている請求項1〜3のいずれか1項に記載のデータ構造。
【請求項5】
前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を撮影した場合に、前記識別データに対応する前記2次元画像の描かれる位置と撮影位置との距離が所定距離よりも長くなる内面に描かれる画像のデータとして指定されている請求項1〜4のいずれか1項に記載のデータ構造。
【請求項6】
前記識別データに対応する前記2次元画像のデータは、無色で描かれる画像のデータとして指定されている請求項1〜5のいずれか1項に記載のデータ構造。
【請求項7】
前記識別データに対応する前記2次元画像は、前記識別データを図形コードに変換した2次元画像である請求項1〜6のいずれか1項に記載のデータ構造。
【請求項8】
前記図形コードは、誤り訂正機能を有する図形コードである請求項7に記載のデータ構造。
【請求項9】
請求項1〜8のいずれか1項に記載のデータ構造から識別データを取得するコンピュータプログラムであって、
前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する機能と、
前記検索されたデータを解析して前記識別データを取得する機能と、
をコンピュータに実現させることを特徴とするコンピュータプログラム。
【請求項10】
請求項7又は8に記載のデータ構造から識別データを取得するコンピュータプログラムであって、
前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する機能と、
前記特定された図形コードを復号して前記識別データを取得する機能と、
をコンピュータに実現させることを特徴とするコンピュータプログラム。
【請求項11】
請求項1〜8のいずれか1項に記載のデータ構造から識別データを取得するデータ取得装置であって、
前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する検索部と、
前記検索されたデータを解析して前記識別データを取得する取得部と、
を備えることを特徴とするデータ取得装置。
【請求項12】
請求項7又は8に記載のデータ構造から識別データを取得するデータ取得装置であって、
前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する特定部と、
前記特定された図形コードを復号して前記識別データを取得する取得部と、
を備えることを特徴とするデータ取得装置。
【請求項1】
生産ラインのシミュレーションに用いられるデータの構造であって、
シミュレーション対象の3次元画像を特定する3次元画像データと、
前記シミュレーションの実行時に表示される表示用テクスチャのデータと、
前記シミュレーション対象を識別するデータである識別データと、を備え、
前記表示用テクスチャのデータは、前記3次元画像の外面に対して描かれる画像のデータとして指定され、
前記識別データは、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されていることを特徴とするデータ構造。
【請求項2】
前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像における同一の面に対して描かれる画像のデータとして指定されている請求項1に記載のデータ構造。
【請求項3】
前記識別データに対応する前記2次元画像のデータと前記表示用テクスチャのデータとは、前記3次元画像に対して画像を描く向きを示す法線ベクトルが互いに反対向きに指定されている請求項1又は2に記載のデータ構造。
【請求項4】
前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を所定方向から撮影した場合に表示される画像のデータとして指定されている請求項1〜3のいずれか1項に記載のデータ構造。
【請求項5】
前記識別データに対応する前記2次元画像のデータは、前記3次元画像の内面を撮影した場合に、前記識別データに対応する前記2次元画像の描かれる位置と撮影位置との距離が所定距離よりも長くなる内面に描かれる画像のデータとして指定されている請求項1〜4のいずれか1項に記載のデータ構造。
【請求項6】
前記識別データに対応する前記2次元画像のデータは、無色で描かれる画像のデータとして指定されている請求項1〜5のいずれか1項に記載のデータ構造。
【請求項7】
前記識別データに対応する前記2次元画像は、前記識別データを図形コードに変換した2次元画像である請求項1〜6のいずれか1項に記載のデータ構造。
【請求項8】
前記図形コードは、誤り訂正機能を有する図形コードである請求項7に記載のデータ構造。
【請求項9】
請求項1〜8のいずれか1項に記載のデータ構造から識別データを取得するコンピュータプログラムであって、
前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する機能と、
前記検索されたデータを解析して前記識別データを取得する機能と、
をコンピュータに実現させることを特徴とするコンピュータプログラム。
【請求項10】
請求項7又は8に記載のデータ構造から識別データを取得するコンピュータプログラムであって、
前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する機能と、
前記特定された図形コードを復号して前記識別データを取得する機能と、
をコンピュータに実現させることを特徴とするコンピュータプログラム。
【請求項11】
請求項1〜8のいずれか1項に記載のデータ構造から識別データを取得するデータ取得装置であって、
前記データ構造から、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを検索する検索部と、
前記検索されたデータを解析して前記識別データを取得する取得部と、
を備えることを特徴とするデータ取得装置。
【請求項12】
請求項7又は8に記載のデータ構造から識別データを取得するデータ取得装置であって、
前記データ構造のうち、前記3次元画像の内面に対して描かれる2次元画像のデータとして指定されているデータを解析して前記図形コードを特定する特定部と、
前記特定された図形コードを復号して前記識別データを取得する取得部と、
を備えることを特徴とするデータ取得装置。
【図1】


【図2】
【図3】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図4】
【公開番号】特開2013−73520(P2013−73520A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−213514(P2011−213514)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【出願人】(390001052)一般財団法人機械振興協会 (21)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【出願人】(390001052)一般財団法人機械振興協会 (21)
【Fターム(参考)】
[ Back to top ]