
トイレ装置
【課題】使用者が意図を持って行う動作を非接触で検出することで、使用者の意図を判断し、意図どおりに便座の上げ下げの動作を制御する。
【解決手段】本発明にかかるトイレ装置は、動作判別手段14により人体の少なくとも一部の動作を検出し、モータ制御手段7によって検出した動作に対応して便座モータ5を制御し、便座4を回転動作させるものである。使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【解決手段】本発明にかかるトイレ装置は、動作判別手段14により人体の少なくとも一部の動作を検出し、モータ制御手段7によって検出した動作に対応して便座モータ5を制御し、便座4を回転動作させるものである。使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、便器を使用する使用者の動作を検出し、トイレの各種制御を行うトイレ装置に関するものである。
【背景技術】
【0002】
従来からトイレ装置として、人体検出センサを備え、使用者が便器に近づいたことを検出して便蓋を自動的に開くようにしたものはよく知られている。そうすることで、衛生面を気にする使用者に、トイレ空間でできるだけ物に手を触れないでいられるようにして快適性を確保する効果がある。
【0003】
しかし、便座については、男性が小用で使用するときには立ち上げて、そうでないときには着座するので下げた状態にするのが一般的な使い方であり、その男性小用だけを検出することは難しく、手で直接持ち上げたり下げたりするのが一般的であり、あるいは操作部に便座ボタンを設けて使用者の操作で便座の上げ下げを制御するものもある。
【0004】
しかし、衛生面を気にする使用者にとっては、便座に触れることはもちろん操作部に触れることも避けたいものである。
【0005】
便座の制御を自動的に行うためには、例えば特殊な履物を使用し、便座からその履物が検出できるかどうかで、検出できれば履物が便座の方を向いていて、それは使用者が便器のほうを向いているものとして便座を立ち上げる。検出できなければ履物は便座の方を向いていなくて、それは使用者が便器に背を向けているものとして便座を下げた状態にするという方法がある(例えば、特許文献1参照)。
【0006】
また、便座や操作部に触れずに便座を上げたり下げたりするものとしては、物体が近付いたことを検出する検出ユニットに便座の開閉を駆動するモータを接続し、検出ユニットに手を近づけることで便座の上げ下げを制御する方法がある(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−61361号公報
【特許文献2】登録実用新案第3153196号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、前記第1の従来の方法では、専用の特殊な履物を履かなければならないという煩わしさがある。そして、その専用の履物を履いていても、便座と履物の位置関係によっては必ずしも正しく検出できず、誤動作を起こしてしまうことがある。
【0009】
更に、履物が便器の方に向いていることを正しく検出できたとしても、使用者が必ずしも便座を立ち上げたいということではなく、着座したいのに便座が立ち上がってしまうというような不便もある。そうしたことから、使用者が便座を立ち上げて使いたいのか、下げた状態で着座したいのかの意思を自動的に判定することはなかなか困難である。
【0010】
また、前記第2の従来の方法では、使用者の何気ない動作を近接と検出して、便座が使用者の意図しない動作をしてしまう場合が起こりやすい。
【0011】
つまり、家庭ではトイレ空間は一般に狭く、そこで使用者は、しゃがんだり立ったり、あるいは着衣を脱いだり着けたり動作をするものであるために、つい体の一部が検出ユニットに近付いてしまうことがある。近接したことを検出して便座の動作を制御すると、使用者の意図しない便座の動作になってしまうことが起こりやすいものである。
【0012】
本発明は、上記課題を解決するものであり、使用者が意図を持って行う動作を非接触で検出することで、使用者の意図を判断し、意図どおりに便座の上げ下げの動作を制御することを目的とする。
【課題を解決するための手段】
【0013】
本発明のトイレ装置は、
便座と、
便座を回転動作させるモータと、
人体の一部の動作を検出する動作検知手段と、
前記動作検知手段により検知した動きのなかから特定の動作を判別する動作判別手段と、前記動作判別手段の判別結果に応じて、前記モータを制御するモータ制御手段と、
を備え、
前記動作検知手段は、照度センサからなり、検知する特定の動きにあわせて複数の照度センサを配設したものである。
【0014】
この構成により、動作判別手段により人体の一部の動作を検出し、制御手段によって検出した動作に対応してモータを制御し便座を回転動作するので、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【発明の効果】
【0015】
本発明によれば、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の上げ下げ動作を制御することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施の形態1におけるトイレ装置の構成図
【図2】同実施の形態における複数の照度センサの出力の時間変化を示す図
【図3】同実施の形態における信号処理回路の動作を説明するフローチャート
【図4】本発明の実施の形態2におけるトイレ装置の遠隔操作装置の構成図
【図5】同実施の形態における複数の照度センサと発光素子と受光素子の出力の時間変化を示す図
【図6】同実施の形態における信号処理回路の動作を説明するフローチャート
【発明を実施するための形態】
【0017】
第1の発明は、
便座と、
便座を回転動作させるモータと、
人体の一部の動作を検出する動作検知手段と、
前記動作検知手段により検知した動きのなかから特定の動作を判別する動作判別手段と、前記動作判別手段の判別結果に応じて、前記モータを制御するモータ制御手段と、
を備え、
前記動作検知手段は、照度センサからなり、検知する特定の動きにあわせて照度センサを配設したものである。
【0018】
本発明によれば、動作判別手段により人体の少なくとも一部の動作を検出し、モータ制
御手段によって検出した動作に対応して便座モータを制御し便座を回転動作させるので、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【0019】
この場合、動作検知手段は照度センサなので、たとえば人の手の動作を検出する場合、手が照度センサに接触して手が完全に照度センサを覆うように動作しても、的確に動作を検出することができる。もし、この動作検知手段が赤外線センサであった場合は、赤外線センサを覆うように手が接触するほど近接しすぎると、赤外線センサは人の手を検出することができない。
【0020】
このように、動作検知手段は照度センサ照度センサからなり、検知する特定の動きにあわせて照度センサを配設したことにより、照度センサに直接接触するほど近接しても、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【0021】
第2の発明は、前記便座および前記便座モータを含む本体と、前記本体とは別に設けられる遠隔操作装置とをさらに備え、前記遠隔操作装置が、前記動作判別手段と、前記遠隔操作装置と前記本体との通信を行う通信手段とを有するものである。
【0022】
これによって、使用者が至近距離で衣類の着脱などの動作をする本体とは別の場所に遠隔操作手段を設置することにより、使用者が意図を持って行う動作のみを検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【0023】
第3の発明は、特に、第1の発明または第2の発明の動作判別手段が人体の少なくとも一部が近接したことを検出する照度センサを複数有することによって、複数の照度センサのどれに先に近接したかによって人体の少なくとも一部の移動方向を判定することができて、移動方向に応じてモータ制御手段は便座の駆動を制御できる。
【0024】
第4の発明は、特に、第3の発明の複数の照度センサが、照度の変化を検出する構成であり、照度センサは人体の一部によって遮られる照度の変化を検出することができ、それを複数配置したものである。これによって、複数の照度センサで、人体の動きの方向を検知するように配置され、人体の少なくとも一部の移動方向を判定することができて、移動方向によりモータ制御手段は便座の駆動を制御できる。
【0025】
第5の発明は、特に、第3の発明の動作判別手段が、前記照度センサとは別に人体の少なくとも一部が近接したことを検出する人体近接検知センサを有することによって、人体の少なくとも一部が近接したことを検出した時に、照度センサによる動作判別をすることができ、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができ、使用者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0026】
第6の発明は、特に、第5の発明の人体近接検知センサが、赤外線センサとすることによって、赤外線により人体の少なくとも一部が近接したことを検出し、更にその時に使用者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0027】
第7の発明は、特に、第5の発明の人体近接検知センサが、超音波センサとすることによって、超音波により人体の少なくとも一部が近接したことを検出し、更にその時に使用
者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0028】
第8の発明は、特に、第5の発明の人体近接検知センサが、電波センサとすることによって、電波により人体の少なくとも一部が近接したことを検出し、更にその時に使用者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0029】
(実施の形態1)
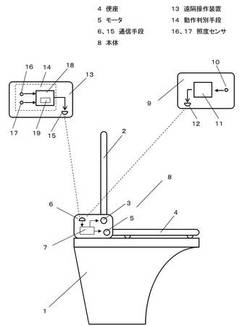
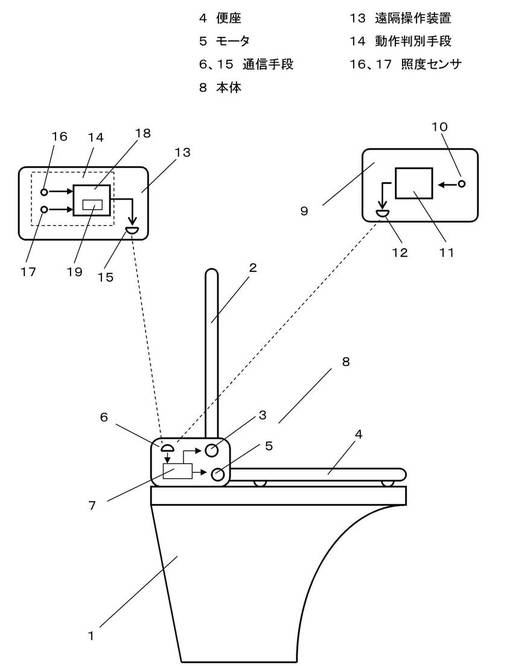
図1は本発明の第1の実施の形態におけるトイレ装置の全体構成を説明する図であり、前記トイレ装置が便器1上面に取り付けられる。便蓋2は開けて使用し、使用しないときには閉じるものであり、便蓋モータ3は、便蓋2を回転駆動させて開閉動作を行うためのDCモータ(直流モータ)である。
【0030】
便座4は、着座するときには図に示すように下げて使うものであり、また男性の小用のときのように立って便器1を使うときには、立ち上げて使うものである。便座モータ5は、便座4を回転駆動させて、立ち上げ、立ち下げの動作を行うためのDCモータである。
【0031】
第1の受光素子6は、後述するリモコンから赤外線による信号を受信する受光ユニットである。モータ制御手段7は、マイクロコンピュータにより構成され、第1の受光素子6が受光したリモコンからの信号により便蓋モータ3や便座モータ5の駆動を制御し、便蓋2の開閉、便座4の上げ下げの制御を行う。本体8は、これら便蓋2、便蓋モータ3、便座4、便座モータ5、第1の受光素子6、モータ制御手段7を有している。
【0032】
第1のリモコン9は、人が近づいたことを検出すると第1の受光素子6に、赤外信号で無線送信する。第1のリモコン9は、第1の赤外線センサ10、第1の信号処理回路11、第1の発光素子12を含む構成としていて、便器1の設置されているトイレ空間などで便器1より手前の壁などに取り付けている。
【0033】
第1の赤外線センサ10は焦電型赤外線センサであり、その視野範囲内での温度変化に対して出力を発生するものである。人がいないときには、便器1が設置されているトイレ空間などの壁などが視野に入っていて視野範囲内の温度は安定している。そこに人が入ってくると、壁の温度と人の皮膚の温度は異なるもので、多くの場合人の皮膚温の方が高いのであるが、異なる温度のものが視野に入ることで温度変動により出力を発生する。
【0034】
第1の信号処理回路11は、第1の赤外線センサ10の出力を増幅する増幅回路や、信号から人が近付いたことを判定するマイクロコンピュータにより構成される判定回路を有するものであり、第1の赤外線センサ10の出力から便器が設置されているトイレ空間内に人が入り、便器1に近づいたことを判定すると、第1の発光素子12を点滅させて、人が近づいた信号を第1の受光素子6、に送信する。第1の発光素子12は赤外発光ダイオードである。
【0035】
第1の受光素子6、は第1の発光素子12から第1のリモコン9に人が近付いたことを受信すると、モータ制御手段7は便蓋2が閉じていれば開ける方向に便蓋モータ3を回転させ、便蓋2を開ける。
【0036】
モータ制御手段7は便蓋2を開けるように便蓋モータ3を駆動してから予め定めた時間を経過すると便蓋モータ3を回転させて便蓋2を閉じる。ここで予め定めた時間とは通常
排尿、排便に要する時間より十分長く例えば10分間として設定したものである。
【0037】
遠隔操作装置である第2のリモコン13は、人の手の上下動作を検出すると第1の受光素子6、に信号を赤外信号で無線送信する。
【0038】
第2のリモコン13は、手の上下動作を検出する動作判別手段14と第2の発光素子15とを含むものであり、動作判別手段14は第1の照度センサ16と、第2の照度センサ17と、第2の信号処理回路18を含む構成であり、第2の発光素子15は赤外発光ダイオードである。第2のリモコン13は、便器1の設置されているトイレ空間などで便器1の横か、やや奥の使用者が手の届く範囲の壁などに取り付けている。
【0039】
なお、第2の発光素子15と第1の受光素子6とはそれぞれ、一組の通信手段の送信手段と受信手段として機能する。
【0040】
第1の照度センサ16と第2の照度センサ17は上下に並べて設置していて、いずれもその照度センサが受ける照度変化に対して出力を発生するものである。
【0041】
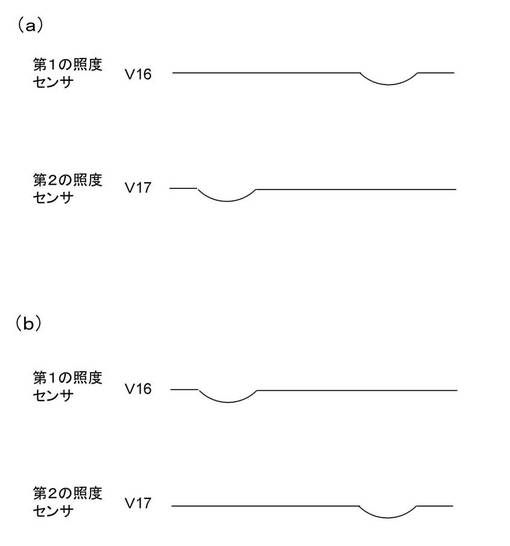
図2を用いて第1の照度センサ16と第2の照度センサ17の出力特性について説明する。図2においてV16は第1の照度センサ16の出力の時間変化であり、V17は第2の照度センサ17の出力の時間変化である。
【0042】
図2(a)は第1の照度センサ16と第2の照度センサ17の前で、使用者が手を下から上に振り上げた場合であり、まず下に取り付けている第2の照度センサ17が照度変化に対する出力を発生し、続いて上に取り付けている第1の照度センサ16が照度変化に対する出力を発生する。
【0043】
一方、図2(b)は第1の照度センサ16と第2の照度センサ17の前で、使用者が手を上から下に振り下ろした場合であり、まず上に取り付けている第1の照度センサ16が照度変化に対する出力を発生し、続いて下に取り付けている第2の照度センサ17が照度変化に対する出力を発生する。
【0044】
第2の信号処理回路18は、第1の照度センサ16、第2の照度センサ17、それぞれの増幅回路と増幅した信号を読み込み信号処理するマイクロコンピュータを含むものであり、第1の照度センサ16、第2の照度センサ17のいずれが先に出力を発生したか、即ち図2(a)のパターンか(b)のパターンかを判定し、その判定結果を、第2の発光素子15を点滅させて第1の受光素子6、に送信する。
【0045】
第1の受光素子6、は第2の発光素子15からの信号を受信すると、それが第2の照度センサ17が先に出力を発生し、後から第1の照度センサ16が出力を発生したという判定であれば、使用者が手を下から上に振り上げたものとして、モータ制御手段7は便座4が下げられた状態であれば立ち上げるように便座モータ5を駆動する。
【0046】
第1の照度センサ16が先に出力を発生し、後から第2の照度センサ17が出力を発生したという判定であれば、使用者が手を上から下に振り下ろしたものとして、モータ制御手段7は便座4が上げられた状態であれば立ち下げるように便座モータ5を駆動する。
【0047】
第2の信号処理回路18はタイマー19を有し、例えば第1の照度センサ16が出力を発生した後に所定時間以内に第2の照度センサ17の出力が発生しない、あるいは第2の照度センサ17が出力を発生した後に所定時間以内に第1の照度センサ16の出力が発生しないような場合には、使用者が便座を駆動するために手を振り上げたり、振り下ろした
りの動作をしたのではないと判定し、第2の発光素子15から信号を送るようなことはしない。
【0048】
その所定時間は通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間に、ある程度の時間を加え、例えば0.3秒以内という程度である。
【0049】
第2の信号処理回路18は、例えば第1の照度センサ16が出力を発生した後、早すぎる所定時間以内に第2の照度センサ17の出力が発生した、あるいは第2の照度センサ17が出力を発生した後に早すぎる所定時間以内に第1の照度センサ16の出力が発生したような場合には、使用者が便座を駆動するために手を振り上げたり、振り下ろしたりの動作をしたのではないと判定し、第2の発光素子15から信号を送るようなことはしない。
【0050】
その所定時間は通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間より十分短い時間、例えば0.05秒以内という程度である。
【0051】
第2の信号処理回路18は第1の照度センサ16、第2の照度センサ17、それぞれの出力が所定時間の範囲に発生して、手を振り上げた、あるいは降り下げたと判定して信号送信したら、タイマー19により、所定時間のセンサ出力検出を受け付けない時間を設けている。
【0052】
それは、使用者は手を上に振り上げたら、その後、戻す行為として自然と手を振り下ろしてしまうものであり、それが第1の照度センサ16、第2の照度センサ17の前で振り下ろして戻してしまっても、それを便座を立ち下げるための行為として検出しないようにするためである。
【0053】
ここでの所定時間は0.5秒以上という程度であるが、便座が立ち下がった状態から立ち上がる、あるいは立ち上がった状態から立ち下がるのに要する時間は、次の便座駆動を行う必要はないので、その所要時間に合わせて1.5秒以上という程度とすればよい。
【0054】
モータ制御手段7は、便座が立ち上がっている状態で手を下から上に振り上げたという信号を受信したり、便座が立ち下がっている状態で手を上から下に振り下ろしたという信号を受信したりしても、便座モータ5を駆動することはない。
【0055】
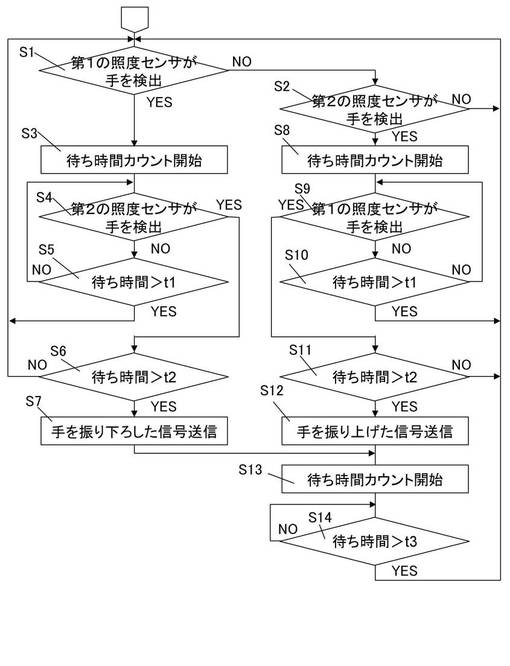
次に第2の信号処理回路18の作用について、図3のフローチャートに基づき説明する。
【0056】
図3において、第2の信号処理回路18は、まずステップS1で第1の照度センサ16が手を検出した出力があったかどうかを判定し、なければステップS2に進み、出力の変化があって手を検出するとステップS3に進む。そしてステップS3では、タイマー19により待ち時間のカウントを開始しステップS4に進む。
【0057】
ステップS4では、次に第2の照度センサ17が手を検出した出力があったかどうかを判定する。そしてなければステップS5に進み、出力の変化があって手を検出するとステップS6に進む。ステップS5では、ステップS3でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。そしてt1を過ぎてしまうと、使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0058】
一方、ステップS5においてまだt1を過ぎていなければステップS4に戻って第2の
照度センサ17が手を検出することを待つ。ここで所定時間t1は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間にある程度の時間を加え、例えば0.3秒という程度である。
【0059】
ステップS6では、第2の照度センサ17が手を検出したのが早すぎないかを確認するのであるが、ステップS3でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定し、t2を過ぎていればステップS7に進み、まだt2に達していなければ使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0060】
ここで所定時間t2は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間より十分短い時間、例えば0.05秒という程度である。
【0061】
ステップS7では、第1の照度センサ16、第2の照度センサ17の順で所定時間の範囲内で手を検出した出力が発生したので、使用者が手を上から下に振り下ろしたものとしてその信号を第2の発光素子15から送信する。そしてステップS13に進む。
【0062】
ステップS2では第2の照度センサ17が手を検出した出力があったかどうかを判定し、なければステップS1に戻り、出力の変化があって手を検出するとステップS8に進む。そしてステップS8では、タイマー19により待ち時間のカウントを開始しステップS9に進む。
【0063】
ステップS9では、次に第1の照度センサ16が手を検出した出力があったかどうかを判定する。そしてなければステップS10に進み、出力の変化があって手を検出するとステップS11に進む。ステップS10では、ステップS8でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。そしてt1を過ぎてしまうと、使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0064】
一方、ステップS10においてまだt1を過ぎていなければステップS9に戻って第1の照度センサ16が手を検出することを待つ。ここで所定時間t1は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間にある程度の時間を加え、例えば0.3秒という程度である。
【0065】
ステップS11では、第1の照度センサ16が手を検出したのが早すぎないかを確認するのであるが、ステップS8でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定し、t2を過ぎていればステップS12に進み、まだt2に達していなければ使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0066】
ここで所定時間t2は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間より十分短い時間、例えば0.05秒という程度である。
【0067】
ステップS12では、第2の照度センサ17、第1の照度センサ16の順で所定時間の範囲内で手を検出した出力が発生したので、使用者が手を下から上に振り上げたものとしてその信号を第2の発光素子15から送信する。そしてステップS13に進む。
【0068】
ステップS13では、タイマー19を一旦リセットし、再度待ち時間のカウントを開始
してステップS14に進む。ステップS14ではステップS13でカウントを開始した待ち時間が予め定めた所定時間t3を経過したかどうかを判定する。経過していなければステップS14に戻って経過するのを待つ。経過すればステップS1に戻って、再び第1の照度センサ16の出力を確認することを繰り返す。
【0069】
ここで所定時間t3だけ待つのは、手の上下動作を確定した直後に、そこから戻すための上下動作があっても、それを検出しないようにするためであり、前記したように便座が立ち上がりや立ち下りに要する時間に合わせ、例えば1.5秒という程度ある。
【0070】
以上のように本発明の実施の形態1によれば、動作判別手段14が、人体の少なくとも一部が近接したことを検出する複数の照度センサ16,17としたことで、使用者の手が照度センサに入る光を遮ることで生じる照度変化による出力の変化の発生する順により、手を上から下に振り下ろしたのか、下から上に振り上げたのかを判定することができ、その上下動作に連動するように便座を立ち上げたり、立ち下げたりの駆動を制御することが可能となる。
【0071】
なお、本実施の形態1では、動作判別手段が人体の少なくとも一部が近接したことを検出する複数の照度センサを、上下に配置して用いたが、斜め上下に配置して用いても、左右横向きに配置して用いても同様の効果を得られるものであり、他にも、複数の照度センサではなく便座を開閉ための照度センサが一つだけで、便座が下がっているときに手を所定時間かざすことによって、照度センサへの光が遮られ便座を上げ、逆に便座が上がっているときに手を所定時間かざすことによって、照度センサへの光が遮られ便座を下げるという方法もある。特に、本実施の形態のように、照度センサを上下に配置した場合、便座の動きと操作指示の動作とが連動しているので使用者には使いやすい。また、検出する動作範囲に合わせて複数のセンサを配置することで、使用者の意図した動作を確実に検出し、かつ、誤検知を少なくすることができる。
【0072】
照度センサを用いた動作判別手段は、わずかな消費電流で可能であり、リモコンを無線にして電池電源で制御することが可能となる効果がある。加えて、照度センサに直接接触するほど近接しても、照度が下がるように確実に作用するため、使用者が意図を持って行う動作を的確に検出することができる。もし、この動作検知手段が、たとえば赤外線センサであった場合は、赤外線センサを覆うように手が接触するほど近接しすぎると、赤外線センサは人体からの受光が閉ざされて人体およびその動作を検出することができない。
【0073】
また、本実施の形態1では、人がトイレ空間に入ったことを検出する第1の赤外線センサ10および第1の信号処理回路11を第1のリモコン9を設けたが、この第1のリモコン9を設けずに、遠隔操作装置である第2のリモコン13に、第1の赤外線センサ10および第1の信号処理回路11を一体に設けてもよい。
【0074】
これによって、第1の赤外線センサ10によって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、遠隔操作装置であるリモコン13の電池寿命を長くできる効果がある。この、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけでなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0075】
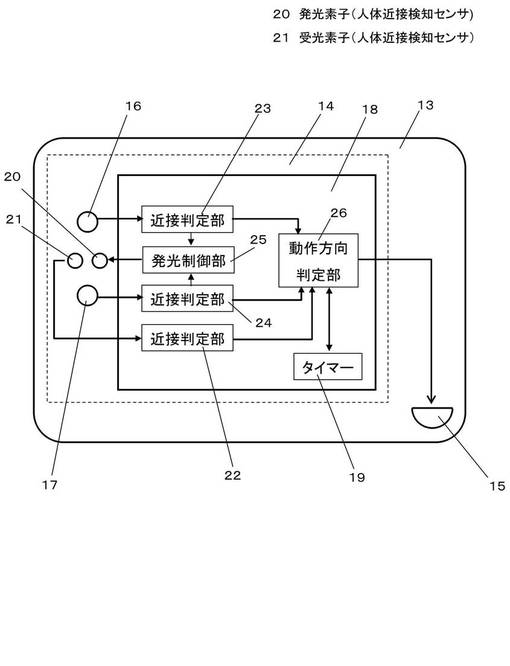
(実施の形態2)
次に本発明の第2の実施の形態について説明する。第2の実施の形態において、第1の実施の形態と異なるところは動作判別手段14の部分であり、図4は動作判別手段14を
含む遠隔操作装置である第2のリモコン13の構成を説明する図である。図4において図1と同じ機能を有するものには同じ番号を付し、説明を省略する。
【0076】
図4において、第3の発光素子20が点灯して出力された赤外光がその前の物体で反射すると、第2の受光素子21が受光して出力を発生する。
【0077】
第2の受光素子21の出力は、第3の発光素子20と第2の受光素子21の前方の物体までの距離に関係し、距離が近いほど出力は大きく、10cmぐらいまでの距離に人体の一部、例えば使用者の手が近接すればそれを検出することができる。
【0078】
その近接の判定を行うのが、第1の近接判定部22である。第1の近接判定部22では第2の受光素子21の出力が所定レベル以上であれば、何かの物体が近接したと判定する。また第2の近接判定部23は第1の照度センサ16、第3の近接判定部24は第2の照度センサ17の出力を監視し、照度変化即ち人体の一部が近付いたことを判定する。
【0079】
これは照度変化を検出する第1の照度センサ16や第2の照度センサ17は、たとえば窓際のカーテンや木の葉の揺らいで動いたときにも、照度が変化してよく似た出力を発生することもありうるので、それと区別して10cmぐらいまでの距離に人体の一部があるかどうかを確認するために、第3の発光素子20を点灯したときの第2の受光素子21の出力の大きさも判定している。
【0080】
発光制御部25は、第3の発光素子20の点灯、消灯を制御する。これは、第3の発光素子20を点灯するためには多くの電流を流さなければならない。したがって常に点灯しておくのでなく、10cmぐらいに手が近付いているのかどうかを判定するときだけ点灯するようにして、電流消費を抑制する。
【0081】
そのために、発光制御部25は第2の近接判定部23と第3の近接判定部24からの入力を受け付けるようにしていて、いずれかの近接判定部が近接を判定したときに、第3の発光素子20を発光させるようにしている。
【0082】
動作方向判定部26は、第2の近接判定部23、第3の近接判定部24の判定の順番より上から下か、下から上かいずれの方向に、人体の一部の例えば手が動いたかを判定するとともに、その時に第1の近接判定部22の判定より近接した場所で手などが動いたことの確認と合わせて、動作方向を確定している。
【0083】
なお、赤外線センサである第3の発光素子20と第2の受光素子21とが、照度センサ16,17とは別に人体の少なくとも一部が近接したことを検出する人体近接検知センサとして機能する。
【0084】
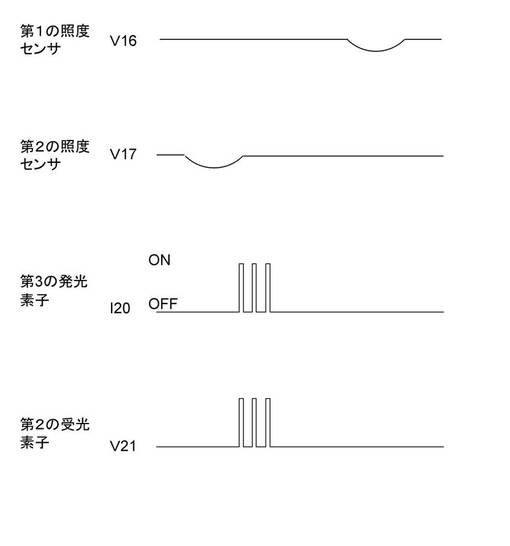
図5は第1の照度センサ16と第2の照度センサ17、および第3の発光素子20と第2の受光素子21の前で、使用者が手を下から上に振り上げた場合の、それぞれの素子の出力の時間的変化を示すタイミングチャートである。
【0085】
図2(a)と同様、V16は第1の照度センサ16の出力の時間変化であり、V17は第2の照度センサ17の出力の時間変化であり、また、I20は第3の発光素子20の出力、V21は第2の受光素子21の出力の時間変化である。
【0086】
図5に示すように、手を下から上に振り上げると、図2(a)と同様、まず下に取り付けている第2の照度センサ17が照度変化に対する出力を発生する。それを第3の近接判定部24が近接と判定し、発光制御部25が第3の発光素子20を所定のパターンで点滅
させる。第3の発光素子20で発光した光は手で反射して第2の受光素子21が受光する。
【0087】
第2の受光素子21は第3の発光素子20の点滅パターンと一致する出力を発生する。そして上に取り付けている第1の照度センサ16が照度変化に対する出力を発生する。
【0088】
このように第2の照度センサ17、第1の照度センサ16の順で出力を発生し、且つ第3の発光素子20の点滅に対して第2の受光素子21でそれと同じ出力があれば、動作方向判定部26は手が下から上に振り上げられたと判定する。第3の発光素子20の点滅に対して第2の受光素子21の出力がなければ、動作方向判定部26は手を近づけて振り上げる動作をしたものではないと判定する。
【0089】
使用者が手を上から下に振り下ろした場合は、第1の照度センサ16と第2の照度センサ17の出力の順が逆になり、先に第1の照度センサ16が出力を発生し、後から第2の照度センサ17が出力を発生する。
【0090】
ここで、発光制御部25が第3の発光素子20を点滅させるのは、他の例えば自然光などで第2の受光素子21が出力をしてしまうことと区別するためであり、所定の点滅パターンと同じパターンで出力があることで、第3の発光素子20の発光が反射して第2の受光素子21が受光したことを確認するためである。
【0091】
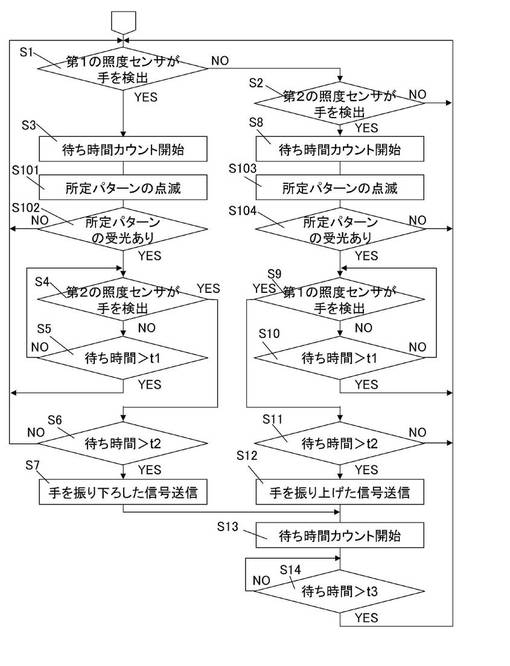
第2の実施の形態における第2の信号処理回路18の動作について、図6のフローチャートにより説明する。図6において、第1の実施の形態の図3と同一の動作については、同一の符号を付し説明を省略する。
【0092】
ステップS1で第1の照度センサ16が手を検出した出力があったと判定するとステップS3に進んでタイマー19により待ち時間のカウントを開始しステップS101に進む。ステップS101で第3の発光素子20を例えば図5に示すような所定のパターンで点滅する。そしてステップS102に進む。
【0093】
ステップS102では、ステップS101で第3の発光素子20を点滅したそのパターンと同じパターンの受光があったかを判定し、同じパターンの受光があればステップS4に進み、同じパターンの受光がなければステップS1に戻る。
【0094】
また、ステップS2で第2の照度センサ17が手を検出した出力があったと判定するとステップS8に進んでタイマー19により待ち時間のカウントを開始しステップS103に進む。ステップS103で第3の、第3の発光素子20を例えば図5に示すような所定のパターンで点滅する。そしてステップS104に進む。
【0095】
ステップS104では、ステップS103で第3の発光素子20を点滅したそのパターンと同じパターンの受光があったかを判定し、同じパターンの受光があればステップS9に進み、同じパターンの受光がなければステップS1に戻る。
【0096】
このようにして実施の形態2によれば、第1の照度センサ16と第2の照度センサ17で手の近接と動く方向を検出する以外に、第3の発光素子20と第2の受光素子21により10cmぐらいのところに手が近接しているかどうかを確認しているので、窓際のカーテンや木の葉の揺らいだような、使用者が便座を上げ下げするための動作でない、別の動作を誤って判定してしまうことがなく、より確実に判定できる。
【0097】
また、第1の照度センサ16か第2の照度センサ17により手の近接を検出した時にだ
け、第3の発光素子を点灯するので、消費電流を抑えることができ、電池電源のリモコンに搭載することもできる。
【0098】
なお、実施の形態2において、赤外線センサである第3の発光素子20や第2の受光素子21は、第1の照度センサ16と第2の照度センサ17との中間位置に配置したが、人体の近接を判定できれば、かならずしも第1の照度センサ16と第2の照度センサ17との中間位置である必要はなく、第1の照度センサ16と第2の照度センサ17が搭載されたリモコン13の表面であれば可能である。
【0099】
また、実施の形態2において図4は、人体近接検知センサである赤外線センサが、第3の発光素子20と第2の受光素子21との別体の2個で構成されている図であるが、発光素子20と受光素子21とが一体化された赤外線センサを使用することで、リモコン13の部品点数を低減でき、遠隔操作装置であるリモコンをよりコンパクトにできる。
【0100】
また、実施の形態2において、人体近接検知センサとして発光素子20と受光素子21とで構成される赤外線センサを用いたが、実施の形態1で説明した第1のリモコンに搭載したような焦電型赤外線センサを用いてもよい。これによって、発光素子20と受光素子21とからなる赤外線センサのような発光のための電力は不要となるため、消費電力が少なく電池寿命を長くすることができる。
【0101】
また、実施の形態2において、人体近接検知センサとして赤外線センサを用いたが、超音波の発信手段と人体の一部での反射による受信手段からなる超音波センサを用いてもよい。これによって、人体の一部との距離をより高精度に判別でき、使用者の動作と操作意図により迅速に反応することができる。
【0102】
また、実施の形態2において、人体近接検知センサとして赤外線センサを用いたが、外部に電波を信号として発信する発信手段と人体の一部での反射による受信手段からなる電波センサを用いてもよい。
【0103】
このように、照度センサ16,17とは別に人体の少なくとも一部が近接したことを検出するために、照度センサとは異なる作動原理の人体近接検知センサを併用することによって、人体近接検知センサによって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、遠隔操作装置であるリモコン13の電池寿命を長くできる効果がある。
【0104】
またさらに、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけでなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0105】
なお、実施の形態2において人体近接検知センサである赤外線センサを、第1の照度センサ16および第2の照度センサ17と同じ第2のリモコン13に搭載したが、別の場所に搭載してもよい。
【0106】
例えば、実施の形態1で説明した第1のリモコンに搭載している人が近付いたことを検出する第1の赤外線センサ10で代用しても良い。この場合には第1のリモコンから第2のリモコンへ人の近接検出を直接通信する手段か、または本体8を介して第2のリモコンに通信する手段を備えることで実現できる。
【0107】
なお、実施の形態1,2において、人がトイレ空間に入ったことを検出する第1の赤外
線センサ10および第1の信号処理回路11を第1のリモコン9を設けたが、この第1のリモコン9を設けずに、遠隔操作装置である第2のリモコン13に、第1の赤外線センサ10および第1の信号処理回路11を一体に設けてもよい。
【0108】
これによって、第1の赤外線センサ10によって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、遠隔操作装置であるリモコン13の電池寿命を長くできる効果がある。この、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけでなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0109】
また、実施の形態1,2において、1つ目として人が近づいたことを検出するリモコン9と、照度センサを備えたリモコン13と、本体8とで構成した商品、2つ目として人が近づいたことを検出するリモコン9の機能を本体8に内蔵し、照度センサを備えたリモコン13と本体8とで構成した商品、3つ目として照度センサを備えたリモコン13の機能を本体8に内蔵し、人が近づいたことを検出するリモコン9と本体8とで構成した商品、さらに4つ目としてリモコン9とリモコン13のいずれの機能も本体8に一体化した商品など、商品形態としては、トイレ室の広さや便器とドアの配置などによって、適した形態が選択でき応用可能である。
【0110】
1つ目である人が近づいたことを検出する第1のリモコン9と、遠隔操作装置である照度センサを備えた第2のリモコン13と、本体8とで構成したトイレ装置は、図1のように、リモコン9、リモコン13と、本体8がそれぞれ任意の場所に設置できるので、いかなるトイレ室の広さや便器とドアの配置であっても、使用者がドア位置に現れた瞬間に人が近づいたことを認識できる場所にリモコン9を設置でき、使用者がドア位置に現れた瞬間に即時に便座の急速暖房を開始でき、さらに、使用者が至近距離で衣類の着脱などの動作をする本体8とは別の場所、たとえば、便器1の設置されているトイレ空間などで便器1より手前の壁など、使用者が意図を持って行う動作(操作)がしやすい場所にリモコン13を設置できるので、使用者が意図を持って行う動作のみを検出しやすく、使用者の意図どおりに便座の動作を制御することができる。
【0111】
2つ目の、第1のリモコン9を設けずに、遠隔操作装置である第2のリモコン13に、第1の赤外線センサ10および第1の信号処理回路11を一体に設けた、いわゆる人が近づいたことを検出するリモコン9の機能を本体8に内蔵し、照度センサを備えたリモコン13と本体8とで構成したトイレ装置は、前記したように、第1の赤外線センサ10によって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、前記1つ目の場合よりも、遠隔操作装置であるリモコン13の電池寿命を長くすることができる効果がある。かつ、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけではなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0112】
3つ目の、照度センサを備えたリモコン13の機能を本体8に内蔵し、人が近づいたことを検出するリモコン9と本体8とで構成したトイレ装置は、トイレ空間において、本体8の近くに遠隔操作装置である第2のリモコン13を設置するのに適した壁がないような場合でも、本体8に照度センサを備えたリモコン13の機能を内蔵していることにより、使用者が意図を持って行う動作を検出でき、使用者の意図どおりに便座の動作を制御することができる。かつ、本体8に照度センサを備えたリモコン13の機能を内蔵しているこ
とにより、リモコン13の機能をつかさどるための電源は本体8と同様に、電池ではなく商用電源いわゆる家庭用電源から供給できるので、照度センサを備えたリモコン13の機能の電池寿命の心配をなくすることができる。また、人が近づいたことを検出する第1のリモコン9はあることから、1つ目や2つ目の構成の場合と同様に、使用者がドア位置に現れた瞬間に人が近づいたことを認識できる場所にリモコン9を設置でき、使用者がドア位置に現れた瞬間に即時に便座の急速暖房を開始することができる。ちなみに、ドア位置という意味は、ドアがある場合は、一般にはドアを開けたとき人を認識できる位置のことを意味するが、ドアがない場合はトイレ空間の入口に人が現れたときということになる。
【0113】
4つ目の、リモコン9とリモコン13のいずれの機能も本体8に一体化して構成したトイレ装置は、人が近づいたことを検出する第1のリモコン9の機能も本体8に内蔵していることから、本体8から認識できる位置に人が現れないと人が近づいたことを検出できない。しかしながら、一般家庭において、本体8にリモコン9の機能が内蔵した構成でも、ドアを開けたとき人を認識できる便器とドアの配置の形態は多くある。リモコン9とリモコン13のいずれの機能も本体8に一体化して構成したトイレ装置は、もっとも安価に提供でき、かつ、リモコン9の電池もリモコン13の電池も不要で、前記したような電池寿命の心配を皆無にすることができる。
このようにトイレ室の広さや便器とドアの配置などによって、適した形態が選択でき応用可能である。
【0114】
なお、以上説明してきた実施の形態1,2において、複数の照度センサは上下に配置して説明したが、このようにすることで便座の立ち上げ、立ち下げという動きと、手の上下動作を合わせてわかり易い操作にできるという効果があるからである。
【0115】
しかし、これは本発明を限定するものではなく、複数の照度センサを左右に並べて配置したり、斜めに並べて配置したりしても、手など人体の一部の移動方向を検出することは同様に可能であり、便座に触れずに使用者の意図どおりに便座を駆動する同様の効果を有するものである。
【産業上の利用可能性】
【0116】
以上のように本発明は、動作判別手段により人体の少なくとも一部の上下動作を検出し、制御手段によって検出した上下動作に対応してモータを制御し便座を回転動作するので、使用者が意図を持って行う上下動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となるので、トイレ装置に適用できる他、手が汚れたり濡れたりしているときに、操作したいような機器にも利用可能である。
【符号の説明】
【0117】
1 便器
2 便蓋
3 便蓋モータ
4 便座
5 便座モータ
6 第1の受光素子
7 モータ制御手段
8 本体
9 第1のリモコン
10 第1の赤外線センサ
11 第1の信号処理回路
12 第1の発光素子
13 第2のリモコン
14 動作判別手段
15 第2の発光素子
16 第1の照度センサ
17 第2の照度センサ
18 第2の信号処理回路
19 タイマー
20 第3の発光素子
21 第2の受光素子
22 第1の近接判定部
23 第2の近接判定部
24 第3の近接判定部
【技術分野】
【0001】
本発明は、便器を使用する使用者の動作を検出し、トイレの各種制御を行うトイレ装置に関するものである。
【背景技術】
【0002】
従来からトイレ装置として、人体検出センサを備え、使用者が便器に近づいたことを検出して便蓋を自動的に開くようにしたものはよく知られている。そうすることで、衛生面を気にする使用者に、トイレ空間でできるだけ物に手を触れないでいられるようにして快適性を確保する効果がある。
【0003】
しかし、便座については、男性が小用で使用するときには立ち上げて、そうでないときには着座するので下げた状態にするのが一般的な使い方であり、その男性小用だけを検出することは難しく、手で直接持ち上げたり下げたりするのが一般的であり、あるいは操作部に便座ボタンを設けて使用者の操作で便座の上げ下げを制御するものもある。
【0004】
しかし、衛生面を気にする使用者にとっては、便座に触れることはもちろん操作部に触れることも避けたいものである。
【0005】
便座の制御を自動的に行うためには、例えば特殊な履物を使用し、便座からその履物が検出できるかどうかで、検出できれば履物が便座の方を向いていて、それは使用者が便器のほうを向いているものとして便座を立ち上げる。検出できなければ履物は便座の方を向いていなくて、それは使用者が便器に背を向けているものとして便座を下げた状態にするという方法がある(例えば、特許文献1参照)。
【0006】
また、便座や操作部に触れずに便座を上げたり下げたりするものとしては、物体が近付いたことを検出する検出ユニットに便座の開閉を駆動するモータを接続し、検出ユニットに手を近づけることで便座の上げ下げを制御する方法がある(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−61361号公報
【特許文献2】登録実用新案第3153196号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、前記第1の従来の方法では、専用の特殊な履物を履かなければならないという煩わしさがある。そして、その専用の履物を履いていても、便座と履物の位置関係によっては必ずしも正しく検出できず、誤動作を起こしてしまうことがある。
【0009】
更に、履物が便器の方に向いていることを正しく検出できたとしても、使用者が必ずしも便座を立ち上げたいということではなく、着座したいのに便座が立ち上がってしまうというような不便もある。そうしたことから、使用者が便座を立ち上げて使いたいのか、下げた状態で着座したいのかの意思を自動的に判定することはなかなか困難である。
【0010】
また、前記第2の従来の方法では、使用者の何気ない動作を近接と検出して、便座が使用者の意図しない動作をしてしまう場合が起こりやすい。
【0011】
つまり、家庭ではトイレ空間は一般に狭く、そこで使用者は、しゃがんだり立ったり、あるいは着衣を脱いだり着けたり動作をするものであるために、つい体の一部が検出ユニットに近付いてしまうことがある。近接したことを検出して便座の動作を制御すると、使用者の意図しない便座の動作になってしまうことが起こりやすいものである。
【0012】
本発明は、上記課題を解決するものであり、使用者が意図を持って行う動作を非接触で検出することで、使用者の意図を判断し、意図どおりに便座の上げ下げの動作を制御することを目的とする。
【課題を解決するための手段】
【0013】
本発明のトイレ装置は、
便座と、
便座を回転動作させるモータと、
人体の一部の動作を検出する動作検知手段と、
前記動作検知手段により検知した動きのなかから特定の動作を判別する動作判別手段と、前記動作判別手段の判別結果に応じて、前記モータを制御するモータ制御手段と、
を備え、
前記動作検知手段は、照度センサからなり、検知する特定の動きにあわせて複数の照度センサを配設したものである。
【0014】
この構成により、動作判別手段により人体の一部の動作を検出し、制御手段によって検出した動作に対応してモータを制御し便座を回転動作するので、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【発明の効果】
【0015】
本発明によれば、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の上げ下げ動作を制御することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施の形態1におけるトイレ装置の構成図
【図2】同実施の形態における複数の照度センサの出力の時間変化を示す図
【図3】同実施の形態における信号処理回路の動作を説明するフローチャート
【図4】本発明の実施の形態2におけるトイレ装置の遠隔操作装置の構成図
【図5】同実施の形態における複数の照度センサと発光素子と受光素子の出力の時間変化を示す図
【図6】同実施の形態における信号処理回路の動作を説明するフローチャート
【発明を実施するための形態】
【0017】
第1の発明は、
便座と、
便座を回転動作させるモータと、
人体の一部の動作を検出する動作検知手段と、
前記動作検知手段により検知した動きのなかから特定の動作を判別する動作判別手段と、前記動作判別手段の判別結果に応じて、前記モータを制御するモータ制御手段と、
を備え、
前記動作検知手段は、照度センサからなり、検知する特定の動きにあわせて照度センサを配設したものである。
【0018】
本発明によれば、動作判別手段により人体の少なくとも一部の動作を検出し、モータ制
御手段によって検出した動作に対応して便座モータを制御し便座を回転動作させるので、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【0019】
この場合、動作検知手段は照度センサなので、たとえば人の手の動作を検出する場合、手が照度センサに接触して手が完全に照度センサを覆うように動作しても、的確に動作を検出することができる。もし、この動作検知手段が赤外線センサであった場合は、赤外線センサを覆うように手が接触するほど近接しすぎると、赤外線センサは人の手を検出することができない。
【0020】
このように、動作検知手段は照度センサ照度センサからなり、検知する特定の動きにあわせて照度センサを配設したことにより、照度センサに直接接触するほど近接しても、使用者が意図を持って行う動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【0021】
第2の発明は、前記便座および前記便座モータを含む本体と、前記本体とは別に設けられる遠隔操作装置とをさらに備え、前記遠隔操作装置が、前記動作判別手段と、前記遠隔操作装置と前記本体との通信を行う通信手段とを有するものである。
【0022】
これによって、使用者が至近距離で衣類の着脱などの動作をする本体とは別の場所に遠隔操作手段を設置することにより、使用者が意図を持って行う動作のみを検出し、使用者の意図どおりに便座の動作を制御することが可能となる。
【0023】
第3の発明は、特に、第1の発明または第2の発明の動作判別手段が人体の少なくとも一部が近接したことを検出する照度センサを複数有することによって、複数の照度センサのどれに先に近接したかによって人体の少なくとも一部の移動方向を判定することができて、移動方向に応じてモータ制御手段は便座の駆動を制御できる。
【0024】
第4の発明は、特に、第3の発明の複数の照度センサが、照度の変化を検出する構成であり、照度センサは人体の一部によって遮られる照度の変化を検出することができ、それを複数配置したものである。これによって、複数の照度センサで、人体の動きの方向を検知するように配置され、人体の少なくとも一部の移動方向を判定することができて、移動方向によりモータ制御手段は便座の駆動を制御できる。
【0025】
第5の発明は、特に、第3の発明の動作判別手段が、前記照度センサとは別に人体の少なくとも一部が近接したことを検出する人体近接検知センサを有することによって、人体の少なくとも一部が近接したことを検出した時に、照度センサによる動作判別をすることができ、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができ、使用者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0026】
第6の発明は、特に、第5の発明の人体近接検知センサが、赤外線センサとすることによって、赤外線により人体の少なくとも一部が近接したことを検出し、更にその時に使用者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0027】
第7の発明は、特に、第5の発明の人体近接検知センサが、超音波センサとすることによって、超音波により人体の少なくとも一部が近接したことを検出し、更にその時に使用
者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0028】
第8の発明は、特に、第5の発明の人体近接検知センサが、電波センサとすることによって、電波により人体の少なくとも一部が近接したことを検出し、更にその時に使用者が照度センサから近接した場所で動作したかを確認でき、使用者が意図を持って行う動作のみを検出し、人体の一部の移動方向を正しく検出して使用者の意図どおりに便座の動作を制御することが可能となる。
【0029】
(実施の形態1)
図1は本発明の第1の実施の形態におけるトイレ装置の全体構成を説明する図であり、前記トイレ装置が便器1上面に取り付けられる。便蓋2は開けて使用し、使用しないときには閉じるものであり、便蓋モータ3は、便蓋2を回転駆動させて開閉動作を行うためのDCモータ(直流モータ)である。
【0030】
便座4は、着座するときには図に示すように下げて使うものであり、また男性の小用のときのように立って便器1を使うときには、立ち上げて使うものである。便座モータ5は、便座4を回転駆動させて、立ち上げ、立ち下げの動作を行うためのDCモータである。
【0031】
第1の受光素子6は、後述するリモコンから赤外線による信号を受信する受光ユニットである。モータ制御手段7は、マイクロコンピュータにより構成され、第1の受光素子6が受光したリモコンからの信号により便蓋モータ3や便座モータ5の駆動を制御し、便蓋2の開閉、便座4の上げ下げの制御を行う。本体8は、これら便蓋2、便蓋モータ3、便座4、便座モータ5、第1の受光素子6、モータ制御手段7を有している。
【0032】
第1のリモコン9は、人が近づいたことを検出すると第1の受光素子6に、赤外信号で無線送信する。第1のリモコン9は、第1の赤外線センサ10、第1の信号処理回路11、第1の発光素子12を含む構成としていて、便器1の設置されているトイレ空間などで便器1より手前の壁などに取り付けている。
【0033】
第1の赤外線センサ10は焦電型赤外線センサであり、その視野範囲内での温度変化に対して出力を発生するものである。人がいないときには、便器1が設置されているトイレ空間などの壁などが視野に入っていて視野範囲内の温度は安定している。そこに人が入ってくると、壁の温度と人の皮膚の温度は異なるもので、多くの場合人の皮膚温の方が高いのであるが、異なる温度のものが視野に入ることで温度変動により出力を発生する。
【0034】
第1の信号処理回路11は、第1の赤外線センサ10の出力を増幅する増幅回路や、信号から人が近付いたことを判定するマイクロコンピュータにより構成される判定回路を有するものであり、第1の赤外線センサ10の出力から便器が設置されているトイレ空間内に人が入り、便器1に近づいたことを判定すると、第1の発光素子12を点滅させて、人が近づいた信号を第1の受光素子6、に送信する。第1の発光素子12は赤外発光ダイオードである。
【0035】
第1の受光素子6、は第1の発光素子12から第1のリモコン9に人が近付いたことを受信すると、モータ制御手段7は便蓋2が閉じていれば開ける方向に便蓋モータ3を回転させ、便蓋2を開ける。
【0036】
モータ制御手段7は便蓋2を開けるように便蓋モータ3を駆動してから予め定めた時間を経過すると便蓋モータ3を回転させて便蓋2を閉じる。ここで予め定めた時間とは通常
排尿、排便に要する時間より十分長く例えば10分間として設定したものである。
【0037】
遠隔操作装置である第2のリモコン13は、人の手の上下動作を検出すると第1の受光素子6、に信号を赤外信号で無線送信する。
【0038】
第2のリモコン13は、手の上下動作を検出する動作判別手段14と第2の発光素子15とを含むものであり、動作判別手段14は第1の照度センサ16と、第2の照度センサ17と、第2の信号処理回路18を含む構成であり、第2の発光素子15は赤外発光ダイオードである。第2のリモコン13は、便器1の設置されているトイレ空間などで便器1の横か、やや奥の使用者が手の届く範囲の壁などに取り付けている。
【0039】
なお、第2の発光素子15と第1の受光素子6とはそれぞれ、一組の通信手段の送信手段と受信手段として機能する。
【0040】
第1の照度センサ16と第2の照度センサ17は上下に並べて設置していて、いずれもその照度センサが受ける照度変化に対して出力を発生するものである。
【0041】
図2を用いて第1の照度センサ16と第2の照度センサ17の出力特性について説明する。図2においてV16は第1の照度センサ16の出力の時間変化であり、V17は第2の照度センサ17の出力の時間変化である。
【0042】
図2(a)は第1の照度センサ16と第2の照度センサ17の前で、使用者が手を下から上に振り上げた場合であり、まず下に取り付けている第2の照度センサ17が照度変化に対する出力を発生し、続いて上に取り付けている第1の照度センサ16が照度変化に対する出力を発生する。
【0043】
一方、図2(b)は第1の照度センサ16と第2の照度センサ17の前で、使用者が手を上から下に振り下ろした場合であり、まず上に取り付けている第1の照度センサ16が照度変化に対する出力を発生し、続いて下に取り付けている第2の照度センサ17が照度変化に対する出力を発生する。
【0044】
第2の信号処理回路18は、第1の照度センサ16、第2の照度センサ17、それぞれの増幅回路と増幅した信号を読み込み信号処理するマイクロコンピュータを含むものであり、第1の照度センサ16、第2の照度センサ17のいずれが先に出力を発生したか、即ち図2(a)のパターンか(b)のパターンかを判定し、その判定結果を、第2の発光素子15を点滅させて第1の受光素子6、に送信する。
【0045】
第1の受光素子6、は第2の発光素子15からの信号を受信すると、それが第2の照度センサ17が先に出力を発生し、後から第1の照度センサ16が出力を発生したという判定であれば、使用者が手を下から上に振り上げたものとして、モータ制御手段7は便座4が下げられた状態であれば立ち上げるように便座モータ5を駆動する。
【0046】
第1の照度センサ16が先に出力を発生し、後から第2の照度センサ17が出力を発生したという判定であれば、使用者が手を上から下に振り下ろしたものとして、モータ制御手段7は便座4が上げられた状態であれば立ち下げるように便座モータ5を駆動する。
【0047】
第2の信号処理回路18はタイマー19を有し、例えば第1の照度センサ16が出力を発生した後に所定時間以内に第2の照度センサ17の出力が発生しない、あるいは第2の照度センサ17が出力を発生した後に所定時間以内に第1の照度センサ16の出力が発生しないような場合には、使用者が便座を駆動するために手を振り上げたり、振り下ろした
りの動作をしたのではないと判定し、第2の発光素子15から信号を送るようなことはしない。
【0048】
その所定時間は通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間に、ある程度の時間を加え、例えば0.3秒以内という程度である。
【0049】
第2の信号処理回路18は、例えば第1の照度センサ16が出力を発生した後、早すぎる所定時間以内に第2の照度センサ17の出力が発生した、あるいは第2の照度センサ17が出力を発生した後に早すぎる所定時間以内に第1の照度センサ16の出力が発生したような場合には、使用者が便座を駆動するために手を振り上げたり、振り下ろしたりの動作をしたのではないと判定し、第2の発光素子15から信号を送るようなことはしない。
【0050】
その所定時間は通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間より十分短い時間、例えば0.05秒以内という程度である。
【0051】
第2の信号処理回路18は第1の照度センサ16、第2の照度センサ17、それぞれの出力が所定時間の範囲に発生して、手を振り上げた、あるいは降り下げたと判定して信号送信したら、タイマー19により、所定時間のセンサ出力検出を受け付けない時間を設けている。
【0052】
それは、使用者は手を上に振り上げたら、その後、戻す行為として自然と手を振り下ろしてしまうものであり、それが第1の照度センサ16、第2の照度センサ17の前で振り下ろして戻してしまっても、それを便座を立ち下げるための行為として検出しないようにするためである。
【0053】
ここでの所定時間は0.5秒以上という程度であるが、便座が立ち下がった状態から立ち上がる、あるいは立ち上がった状態から立ち下がるのに要する時間は、次の便座駆動を行う必要はないので、その所要時間に合わせて1.5秒以上という程度とすればよい。
【0054】
モータ制御手段7は、便座が立ち上がっている状態で手を下から上に振り上げたという信号を受信したり、便座が立ち下がっている状態で手を上から下に振り下ろしたという信号を受信したりしても、便座モータ5を駆動することはない。
【0055】
次に第2の信号処理回路18の作用について、図3のフローチャートに基づき説明する。
【0056】
図3において、第2の信号処理回路18は、まずステップS1で第1の照度センサ16が手を検出した出力があったかどうかを判定し、なければステップS2に進み、出力の変化があって手を検出するとステップS3に進む。そしてステップS3では、タイマー19により待ち時間のカウントを開始しステップS4に進む。
【0057】
ステップS4では、次に第2の照度センサ17が手を検出した出力があったかどうかを判定する。そしてなければステップS5に進み、出力の変化があって手を検出するとステップS6に進む。ステップS5では、ステップS3でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。そしてt1を過ぎてしまうと、使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0058】
一方、ステップS5においてまだt1を過ぎていなければステップS4に戻って第2の
照度センサ17が手を検出することを待つ。ここで所定時間t1は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間にある程度の時間を加え、例えば0.3秒という程度である。
【0059】
ステップS6では、第2の照度センサ17が手を検出したのが早すぎないかを確認するのであるが、ステップS3でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定し、t2を過ぎていればステップS7に進み、まだt2に達していなければ使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0060】
ここで所定時間t2は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間より十分短い時間、例えば0.05秒という程度である。
【0061】
ステップS7では、第1の照度センサ16、第2の照度センサ17の順で所定時間の範囲内で手を検出した出力が発生したので、使用者が手を上から下に振り下ろしたものとしてその信号を第2の発光素子15から送信する。そしてステップS13に進む。
【0062】
ステップS2では第2の照度センサ17が手を検出した出力があったかどうかを判定し、なければステップS1に戻り、出力の変化があって手を検出するとステップS8に進む。そしてステップS8では、タイマー19により待ち時間のカウントを開始しステップS9に進む。
【0063】
ステップS9では、次に第1の照度センサ16が手を検出した出力があったかどうかを判定する。そしてなければステップS10に進み、出力の変化があって手を検出するとステップS11に進む。ステップS10では、ステップS8でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。そしてt1を過ぎてしまうと、使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0064】
一方、ステップS10においてまだt1を過ぎていなければステップS9に戻って第1の照度センサ16が手を検出することを待つ。ここで所定時間t1は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間にある程度の時間を加え、例えば0.3秒という程度である。
【0065】
ステップS11では、第1の照度センサ16が手を検出したのが早すぎないかを確認するのであるが、ステップS8でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定し、t2を過ぎていればステップS12に進み、まだt2に達していなければ使用者が手を上下動作させたものではないと判断してステップS1に戻る。
【0066】
ここで所定時間t2は前記したように通常、人が手を振り上げたり振り下ろしたりすると、第1の照度センサ16と第2の照度センサ17の間を通過するのに要する時間より十分短い時間、例えば0.05秒という程度である。
【0067】
ステップS12では、第2の照度センサ17、第1の照度センサ16の順で所定時間の範囲内で手を検出した出力が発生したので、使用者が手を下から上に振り上げたものとしてその信号を第2の発光素子15から送信する。そしてステップS13に進む。
【0068】
ステップS13では、タイマー19を一旦リセットし、再度待ち時間のカウントを開始
してステップS14に進む。ステップS14ではステップS13でカウントを開始した待ち時間が予め定めた所定時間t3を経過したかどうかを判定する。経過していなければステップS14に戻って経過するのを待つ。経過すればステップS1に戻って、再び第1の照度センサ16の出力を確認することを繰り返す。
【0069】
ここで所定時間t3だけ待つのは、手の上下動作を確定した直後に、そこから戻すための上下動作があっても、それを検出しないようにするためであり、前記したように便座が立ち上がりや立ち下りに要する時間に合わせ、例えば1.5秒という程度ある。
【0070】
以上のように本発明の実施の形態1によれば、動作判別手段14が、人体の少なくとも一部が近接したことを検出する複数の照度センサ16,17としたことで、使用者の手が照度センサに入る光を遮ることで生じる照度変化による出力の変化の発生する順により、手を上から下に振り下ろしたのか、下から上に振り上げたのかを判定することができ、その上下動作に連動するように便座を立ち上げたり、立ち下げたりの駆動を制御することが可能となる。
【0071】
なお、本実施の形態1では、動作判別手段が人体の少なくとも一部が近接したことを検出する複数の照度センサを、上下に配置して用いたが、斜め上下に配置して用いても、左右横向きに配置して用いても同様の効果を得られるものであり、他にも、複数の照度センサではなく便座を開閉ための照度センサが一つだけで、便座が下がっているときに手を所定時間かざすことによって、照度センサへの光が遮られ便座を上げ、逆に便座が上がっているときに手を所定時間かざすことによって、照度センサへの光が遮られ便座を下げるという方法もある。特に、本実施の形態のように、照度センサを上下に配置した場合、便座の動きと操作指示の動作とが連動しているので使用者には使いやすい。また、検出する動作範囲に合わせて複数のセンサを配置することで、使用者の意図した動作を確実に検出し、かつ、誤検知を少なくすることができる。
【0072】
照度センサを用いた動作判別手段は、わずかな消費電流で可能であり、リモコンを無線にして電池電源で制御することが可能となる効果がある。加えて、照度センサに直接接触するほど近接しても、照度が下がるように確実に作用するため、使用者が意図を持って行う動作を的確に検出することができる。もし、この動作検知手段が、たとえば赤外線センサであった場合は、赤外線センサを覆うように手が接触するほど近接しすぎると、赤外線センサは人体からの受光が閉ざされて人体およびその動作を検出することができない。
【0073】
また、本実施の形態1では、人がトイレ空間に入ったことを検出する第1の赤外線センサ10および第1の信号処理回路11を第1のリモコン9を設けたが、この第1のリモコン9を設けずに、遠隔操作装置である第2のリモコン13に、第1の赤外線センサ10および第1の信号処理回路11を一体に設けてもよい。
【0074】
これによって、第1の赤外線センサ10によって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、遠隔操作装置であるリモコン13の電池寿命を長くできる効果がある。この、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけでなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0075】
(実施の形態2)
次に本発明の第2の実施の形態について説明する。第2の実施の形態において、第1の実施の形態と異なるところは動作判別手段14の部分であり、図4は動作判別手段14を
含む遠隔操作装置である第2のリモコン13の構成を説明する図である。図4において図1と同じ機能を有するものには同じ番号を付し、説明を省略する。
【0076】
図4において、第3の発光素子20が点灯して出力された赤外光がその前の物体で反射すると、第2の受光素子21が受光して出力を発生する。
【0077】
第2の受光素子21の出力は、第3の発光素子20と第2の受光素子21の前方の物体までの距離に関係し、距離が近いほど出力は大きく、10cmぐらいまでの距離に人体の一部、例えば使用者の手が近接すればそれを検出することができる。
【0078】
その近接の判定を行うのが、第1の近接判定部22である。第1の近接判定部22では第2の受光素子21の出力が所定レベル以上であれば、何かの物体が近接したと判定する。また第2の近接判定部23は第1の照度センサ16、第3の近接判定部24は第2の照度センサ17の出力を監視し、照度変化即ち人体の一部が近付いたことを判定する。
【0079】
これは照度変化を検出する第1の照度センサ16や第2の照度センサ17は、たとえば窓際のカーテンや木の葉の揺らいで動いたときにも、照度が変化してよく似た出力を発生することもありうるので、それと区別して10cmぐらいまでの距離に人体の一部があるかどうかを確認するために、第3の発光素子20を点灯したときの第2の受光素子21の出力の大きさも判定している。
【0080】
発光制御部25は、第3の発光素子20の点灯、消灯を制御する。これは、第3の発光素子20を点灯するためには多くの電流を流さなければならない。したがって常に点灯しておくのでなく、10cmぐらいに手が近付いているのかどうかを判定するときだけ点灯するようにして、電流消費を抑制する。
【0081】
そのために、発光制御部25は第2の近接判定部23と第3の近接判定部24からの入力を受け付けるようにしていて、いずれかの近接判定部が近接を判定したときに、第3の発光素子20を発光させるようにしている。
【0082】
動作方向判定部26は、第2の近接判定部23、第3の近接判定部24の判定の順番より上から下か、下から上かいずれの方向に、人体の一部の例えば手が動いたかを判定するとともに、その時に第1の近接判定部22の判定より近接した場所で手などが動いたことの確認と合わせて、動作方向を確定している。
【0083】
なお、赤外線センサである第3の発光素子20と第2の受光素子21とが、照度センサ16,17とは別に人体の少なくとも一部が近接したことを検出する人体近接検知センサとして機能する。
【0084】
図5は第1の照度センサ16と第2の照度センサ17、および第3の発光素子20と第2の受光素子21の前で、使用者が手を下から上に振り上げた場合の、それぞれの素子の出力の時間的変化を示すタイミングチャートである。
【0085】
図2(a)と同様、V16は第1の照度センサ16の出力の時間変化であり、V17は第2の照度センサ17の出力の時間変化であり、また、I20は第3の発光素子20の出力、V21は第2の受光素子21の出力の時間変化である。
【0086】
図5に示すように、手を下から上に振り上げると、図2(a)と同様、まず下に取り付けている第2の照度センサ17が照度変化に対する出力を発生する。それを第3の近接判定部24が近接と判定し、発光制御部25が第3の発光素子20を所定のパターンで点滅
させる。第3の発光素子20で発光した光は手で反射して第2の受光素子21が受光する。
【0087】
第2の受光素子21は第3の発光素子20の点滅パターンと一致する出力を発生する。そして上に取り付けている第1の照度センサ16が照度変化に対する出力を発生する。
【0088】
このように第2の照度センサ17、第1の照度センサ16の順で出力を発生し、且つ第3の発光素子20の点滅に対して第2の受光素子21でそれと同じ出力があれば、動作方向判定部26は手が下から上に振り上げられたと判定する。第3の発光素子20の点滅に対して第2の受光素子21の出力がなければ、動作方向判定部26は手を近づけて振り上げる動作をしたものではないと判定する。
【0089】
使用者が手を上から下に振り下ろした場合は、第1の照度センサ16と第2の照度センサ17の出力の順が逆になり、先に第1の照度センサ16が出力を発生し、後から第2の照度センサ17が出力を発生する。
【0090】
ここで、発光制御部25が第3の発光素子20を点滅させるのは、他の例えば自然光などで第2の受光素子21が出力をしてしまうことと区別するためであり、所定の点滅パターンと同じパターンで出力があることで、第3の発光素子20の発光が反射して第2の受光素子21が受光したことを確認するためである。
【0091】
第2の実施の形態における第2の信号処理回路18の動作について、図6のフローチャートにより説明する。図6において、第1の実施の形態の図3と同一の動作については、同一の符号を付し説明を省略する。
【0092】
ステップS1で第1の照度センサ16が手を検出した出力があったと判定するとステップS3に進んでタイマー19により待ち時間のカウントを開始しステップS101に進む。ステップS101で第3の発光素子20を例えば図5に示すような所定のパターンで点滅する。そしてステップS102に進む。
【0093】
ステップS102では、ステップS101で第3の発光素子20を点滅したそのパターンと同じパターンの受光があったかを判定し、同じパターンの受光があればステップS4に進み、同じパターンの受光がなければステップS1に戻る。
【0094】
また、ステップS2で第2の照度センサ17が手を検出した出力があったと判定するとステップS8に進んでタイマー19により待ち時間のカウントを開始しステップS103に進む。ステップS103で第3の、第3の発光素子20を例えば図5に示すような所定のパターンで点滅する。そしてステップS104に進む。
【0095】
ステップS104では、ステップS103で第3の発光素子20を点滅したそのパターンと同じパターンの受光があったかを判定し、同じパターンの受光があればステップS9に進み、同じパターンの受光がなければステップS1に戻る。
【0096】
このようにして実施の形態2によれば、第1の照度センサ16と第2の照度センサ17で手の近接と動く方向を検出する以外に、第3の発光素子20と第2の受光素子21により10cmぐらいのところに手が近接しているかどうかを確認しているので、窓際のカーテンや木の葉の揺らいだような、使用者が便座を上げ下げするための動作でない、別の動作を誤って判定してしまうことがなく、より確実に判定できる。
【0097】
また、第1の照度センサ16か第2の照度センサ17により手の近接を検出した時にだ
け、第3の発光素子を点灯するので、消費電流を抑えることができ、電池電源のリモコンに搭載することもできる。
【0098】
なお、実施の形態2において、赤外線センサである第3の発光素子20や第2の受光素子21は、第1の照度センサ16と第2の照度センサ17との中間位置に配置したが、人体の近接を判定できれば、かならずしも第1の照度センサ16と第2の照度センサ17との中間位置である必要はなく、第1の照度センサ16と第2の照度センサ17が搭載されたリモコン13の表面であれば可能である。
【0099】
また、実施の形態2において図4は、人体近接検知センサである赤外線センサが、第3の発光素子20と第2の受光素子21との別体の2個で構成されている図であるが、発光素子20と受光素子21とが一体化された赤外線センサを使用することで、リモコン13の部品点数を低減でき、遠隔操作装置であるリモコンをよりコンパクトにできる。
【0100】
また、実施の形態2において、人体近接検知センサとして発光素子20と受光素子21とで構成される赤外線センサを用いたが、実施の形態1で説明した第1のリモコンに搭載したような焦電型赤外線センサを用いてもよい。これによって、発光素子20と受光素子21とからなる赤外線センサのような発光のための電力は不要となるため、消費電力が少なく電池寿命を長くすることができる。
【0101】
また、実施の形態2において、人体近接検知センサとして赤外線センサを用いたが、超音波の発信手段と人体の一部での反射による受信手段からなる超音波センサを用いてもよい。これによって、人体の一部との距離をより高精度に判別でき、使用者の動作と操作意図により迅速に反応することができる。
【0102】
また、実施の形態2において、人体近接検知センサとして赤外線センサを用いたが、外部に電波を信号として発信する発信手段と人体の一部での反射による受信手段からなる電波センサを用いてもよい。
【0103】
このように、照度センサ16,17とは別に人体の少なくとも一部が近接したことを検出するために、照度センサとは異なる作動原理の人体近接検知センサを併用することによって、人体近接検知センサによって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、遠隔操作装置であるリモコン13の電池寿命を長くできる効果がある。
【0104】
またさらに、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけでなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0105】
なお、実施の形態2において人体近接検知センサである赤外線センサを、第1の照度センサ16および第2の照度センサ17と同じ第2のリモコン13に搭載したが、別の場所に搭載してもよい。
【0106】
例えば、実施の形態1で説明した第1のリモコンに搭載している人が近付いたことを検出する第1の赤外線センサ10で代用しても良い。この場合には第1のリモコンから第2のリモコンへ人の近接検出を直接通信する手段か、または本体8を介して第2のリモコンに通信する手段を備えることで実現できる。
【0107】
なお、実施の形態1,2において、人がトイレ空間に入ったことを検出する第1の赤外
線センサ10および第1の信号処理回路11を第1のリモコン9を設けたが、この第1のリモコン9を設けずに、遠隔操作装置である第2のリモコン13に、第1の赤外線センサ10および第1の信号処理回路11を一体に設けてもよい。
【0108】
これによって、第1の赤外線センサ10によって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、遠隔操作装置であるリモコン13の電池寿命を長くできる効果がある。この、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけでなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0109】
また、実施の形態1,2において、1つ目として人が近づいたことを検出するリモコン9と、照度センサを備えたリモコン13と、本体8とで構成した商品、2つ目として人が近づいたことを検出するリモコン9の機能を本体8に内蔵し、照度センサを備えたリモコン13と本体8とで構成した商品、3つ目として照度センサを備えたリモコン13の機能を本体8に内蔵し、人が近づいたことを検出するリモコン9と本体8とで構成した商品、さらに4つ目としてリモコン9とリモコン13のいずれの機能も本体8に一体化した商品など、商品形態としては、トイレ室の広さや便器とドアの配置などによって、適した形態が選択でき応用可能である。
【0110】
1つ目である人が近づいたことを検出する第1のリモコン9と、遠隔操作装置である照度センサを備えた第2のリモコン13と、本体8とで構成したトイレ装置は、図1のように、リモコン9、リモコン13と、本体8がそれぞれ任意の場所に設置できるので、いかなるトイレ室の広さや便器とドアの配置であっても、使用者がドア位置に現れた瞬間に人が近づいたことを認識できる場所にリモコン9を設置でき、使用者がドア位置に現れた瞬間に即時に便座の急速暖房を開始でき、さらに、使用者が至近距離で衣類の着脱などの動作をする本体8とは別の場所、たとえば、便器1の設置されているトイレ空間などで便器1より手前の壁など、使用者が意図を持って行う動作(操作)がしやすい場所にリモコン13を設置できるので、使用者が意図を持って行う動作のみを検出しやすく、使用者の意図どおりに便座の動作を制御することができる。
【0111】
2つ目の、第1のリモコン9を設けずに、遠隔操作装置である第2のリモコン13に、第1の赤外線センサ10および第1の信号処理回路11を一体に設けた、いわゆる人が近づいたことを検出するリモコン9の機能を本体8に内蔵し、照度センサを備えたリモコン13と本体8とで構成したトイレ装置は、前記したように、第1の赤外線センサ10によって人がトイレ空間に入ったことを検出したときだけ、照度センサ16,17による照度変化を監視して動作判別する動作判別手段14への通電をすればよく、人がトイレ空間にいないときは動作判別手段14に通電する必要がないことから、前記1つ目の場合よりも、遠隔操作装置であるリモコン13の電池寿命を長くすることができる効果がある。かつ、電池寿命を長くして使用者による電池交換の手間をより軽減できるという効果だけではなく、人がトイレ空間にいないとき、たとえば窓際のカーテンや木の葉の揺らぎを使用者の動作として照度センサが反応するような誤動作を防止することができる。
【0112】
3つ目の、照度センサを備えたリモコン13の機能を本体8に内蔵し、人が近づいたことを検出するリモコン9と本体8とで構成したトイレ装置は、トイレ空間において、本体8の近くに遠隔操作装置である第2のリモコン13を設置するのに適した壁がないような場合でも、本体8に照度センサを備えたリモコン13の機能を内蔵していることにより、使用者が意図を持って行う動作を検出でき、使用者の意図どおりに便座の動作を制御することができる。かつ、本体8に照度センサを備えたリモコン13の機能を内蔵しているこ
とにより、リモコン13の機能をつかさどるための電源は本体8と同様に、電池ではなく商用電源いわゆる家庭用電源から供給できるので、照度センサを備えたリモコン13の機能の電池寿命の心配をなくすることができる。また、人が近づいたことを検出する第1のリモコン9はあることから、1つ目や2つ目の構成の場合と同様に、使用者がドア位置に現れた瞬間に人が近づいたことを認識できる場所にリモコン9を設置でき、使用者がドア位置に現れた瞬間に即時に便座の急速暖房を開始することができる。ちなみに、ドア位置という意味は、ドアがある場合は、一般にはドアを開けたとき人を認識できる位置のことを意味するが、ドアがない場合はトイレ空間の入口に人が現れたときということになる。
【0113】
4つ目の、リモコン9とリモコン13のいずれの機能も本体8に一体化して構成したトイレ装置は、人が近づいたことを検出する第1のリモコン9の機能も本体8に内蔵していることから、本体8から認識できる位置に人が現れないと人が近づいたことを検出できない。しかしながら、一般家庭において、本体8にリモコン9の機能が内蔵した構成でも、ドアを開けたとき人を認識できる便器とドアの配置の形態は多くある。リモコン9とリモコン13のいずれの機能も本体8に一体化して構成したトイレ装置は、もっとも安価に提供でき、かつ、リモコン9の電池もリモコン13の電池も不要で、前記したような電池寿命の心配を皆無にすることができる。
このようにトイレ室の広さや便器とドアの配置などによって、適した形態が選択でき応用可能である。
【0114】
なお、以上説明してきた実施の形態1,2において、複数の照度センサは上下に配置して説明したが、このようにすることで便座の立ち上げ、立ち下げという動きと、手の上下動作を合わせてわかり易い操作にできるという効果があるからである。
【0115】
しかし、これは本発明を限定するものではなく、複数の照度センサを左右に並べて配置したり、斜めに並べて配置したりしても、手など人体の一部の移動方向を検出することは同様に可能であり、便座に触れずに使用者の意図どおりに便座を駆動する同様の効果を有するものである。
【産業上の利用可能性】
【0116】
以上のように本発明は、動作判別手段により人体の少なくとも一部の上下動作を検出し、制御手段によって検出した上下動作に対応してモータを制御し便座を回転動作するので、使用者が意図を持って行う上下動作を検出し、使用者の意図どおりに便座の動作を制御することが可能となるので、トイレ装置に適用できる他、手が汚れたり濡れたりしているときに、操作したいような機器にも利用可能である。
【符号の説明】
【0117】
1 便器
2 便蓋
3 便蓋モータ
4 便座
5 便座モータ
6 第1の受光素子
7 モータ制御手段
8 本体
9 第1のリモコン
10 第1の赤外線センサ
11 第1の信号処理回路
12 第1の発光素子
13 第2のリモコン
14 動作判別手段
15 第2の発光素子
16 第1の照度センサ
17 第2の照度センサ
18 第2の信号処理回路
19 タイマー
20 第3の発光素子
21 第2の受光素子
22 第1の近接判定部
23 第2の近接判定部
24 第3の近接判定部
【特許請求の範囲】
【請求項1】
便座と、
便座を回転動作させるモータと、
人体の一部の動作を検出する動作検知手段と、
前記動作検知手段により検知した動きのなかから特定の動作を判別する動作判別手段と、前記動作判別手段の判別結果に応じて、前記モータを制御するモータ制御手段と、
を備え、
前記動作検知手段は、照度センサからなり、検知する特定の動きにあわせて照度センサを配設したトイレ装置。
【請求項2】
前記便座および前記便座モータを含む本体と、前記本体とは別に設けられる遠隔操作装置とをさらに備え、前記遠隔操作装置が、前記動作判別手段と、前記遠隔操作装置と前記本体との通信を行う通信手段とを有する請求項1に記載のトイレ装置。
【請求項3】
前記動作判別手段が、前記人体の少なくとも一部が近接したことを検出する複数の照度センサを有する請求項1または2に記載のトイレ装置。
【請求項4】
前記複数の照度センサが、照度の変化を検出する請求項3に記載のトイレ装置。
【請求項5】
前記動作判別手段が、前記照度センサとは別に人体の少なくとも一部が近接したことを検出する人体近接検知センサを有する請求項3に記載のトイレ装置。
【請求項6】
前記人体近接検知センサが、赤外線センサである請求項5に記載のトイレ装置。
【請求項7】
前記人体近接検知センサが、超音波センサである請求項5に記載のトイレ装置。
【請求項8】
前記人体近接検知センサが、電波センサである請求項5に記載のトイレ装置。
【請求項1】
便座と、
便座を回転動作させるモータと、
人体の一部の動作を検出する動作検知手段と、
前記動作検知手段により検知した動きのなかから特定の動作を判別する動作判別手段と、前記動作判別手段の判別結果に応じて、前記モータを制御するモータ制御手段と、
を備え、
前記動作検知手段は、照度センサからなり、検知する特定の動きにあわせて照度センサを配設したトイレ装置。
【請求項2】
前記便座および前記便座モータを含む本体と、前記本体とは別に設けられる遠隔操作装置とをさらに備え、前記遠隔操作装置が、前記動作判別手段と、前記遠隔操作装置と前記本体との通信を行う通信手段とを有する請求項1に記載のトイレ装置。
【請求項3】
前記動作判別手段が、前記人体の少なくとも一部が近接したことを検出する複数の照度センサを有する請求項1または2に記載のトイレ装置。
【請求項4】
前記複数の照度センサが、照度の変化を検出する請求項3に記載のトイレ装置。
【請求項5】
前記動作判別手段が、前記照度センサとは別に人体の少なくとも一部が近接したことを検出する人体近接検知センサを有する請求項3に記載のトイレ装置。
【請求項6】
前記人体近接検知センサが、赤外線センサである請求項5に記載のトイレ装置。
【請求項7】
前記人体近接検知センサが、超音波センサである請求項5に記載のトイレ装置。
【請求項8】
前記人体近接検知センサが、電波センサである請求項5に記載のトイレ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−66581(P2013−66581A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−206927(P2011−206927)
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]