
トイレ装置
【課題】使用者が意図を持って行う動作を非接触で検出することで、使用者の意図を判断し、使用者の意図どおりに洗浄を制御する。
【解決手段】着座検出手段8が便座3に使用者が着座していることを検出しているときに、動作検出手段11が使用者の人体の一部の所定の動作を検出し、制御手段7が検出した動作に対応して洗浄手段5を制御するので、使用者が意図を持って行う動作を非接触で検出し、使用者の意図どおりに洗浄を制御することが可能となる。
【解決手段】着座検出手段8が便座3に使用者が着座していることを検出しているときに、動作検出手段11が使用者の人体の一部の所定の動作を検出し、制御手段7が検出した動作に対応して洗浄手段5を制御するので、使用者が意図を持って行う動作を非接触で検出し、使用者の意図どおりに洗浄を制御することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、便器を使用する使用者の動作を検出し、トイレの各種制御を行うトイレ装置に関するものであり、特に使用者が人体の一部を予め定めた所定の動作を行うこと検出して局部の洗浄を制御する装置に関するものである。
【背景技術】
【0002】
従来トイレ装置は、使用者が座る便座と、使用者の局部を洗浄するために温水を供給するノズルと、使用者の局部を乾燥するために温風を送風する送風ファンを備え、使用者の操作により温水の供給、温風の送風を制御するもので、そのON/OFFや強弱の設定などを行うスイッチを備えていた。このような従来のトイレ装置では、使用者は局部の洗浄や乾燥のために指でスイッチに接触して操作しなければならなかった。
【0003】
そうした操作を非接触で行えるようにしたものとして、トイレ装置の操作部に物体までの距離を非接触で検出する距離検出器を備え、使用者が操作部に手をかざし、更に操作部に手を近づけたり遠ざけたりすることで、洗浄や送風のON/OFF、強弱の調整をできるようにしたものがある。
【0004】
そうすることで、衛生面を気にする使用者に、トイレ空間でできるだけ物に手を触れないでいられるようにして快適性を確保する効果がある(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−88872号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の方法では、操作する目的以外で操作部に使用者の人体の一部が近付いてしまうと誤動作してしまうという課題がある。操作部は操作しやすいように手の届きやすい箇所に設けるものであるが、そうすると操作する以外の時でも操作部には手など使用者の人体の一部がどうしても近付きやすくなってしまう。
【0007】
距離検出器を使った方法で、使用者が操作のために手を近付けたり遠ざけたりしているのか、そうではなく不意に使用者の手など人体の一部が近付いたり遠ざかったりしているのかを区別することは困難であり、そのために前記従来の方法は洗浄や送風が使用者の意図と違った制御になってしまう誤動作が生じやすいという課題があった。
【0008】
本発明は、上記課題を解決するものであり、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに洗浄を制御するトイレ装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のトイレ装置は、便座と、前記便座に使用者が着座していることを検出する着座検出手段と、使用者の局部を洗浄する洗浄手段と、使用者の人体の一部の所定の動作を非接触で検出する動作検出手段と、前記動作検出手段により検出した動作に対応して前記洗浄手段を制御する制御手段を有し、前記制御手段は前記着座検出手段により使用者の着座を検出しているときにのみ前記動作検出手段の検出を受け付ける構成としたものである。
【0010】
この構成により、着座検出手段が便座に使用者が着座していることを検出しているときに、動作検出手段が使用者の人体の一部の所定の動作を検出し、制御手段が検出した動作に対応して洗浄手段を制御するので、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに洗浄を制御することが可能となる。
【発明の効果】
【0011】
本発明によれば、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに洗浄を制御することが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1におけるトイレ装置の構成図
【図2】同実施の形態における複数の赤外線センサの出力の時間変化を示す図
【図3】同実施の形態における信号処理回路の動作を説明するフローチャート
【図4】同実施の形態における信号処理回路の動作を説明するフローチャート
【図5】同実施の形態における制御手段の動作を説明するフローチャート
【図6】本発明の実施の形態2におけるトイレ装置のリモコンの構成図
【図7】同実施の形態における複数の赤外線センサの出力の時間変化を示す図
【図8】本発明の実施の形態2におけるトイレ装置のリモコンの構成図
【図9】同実施の形態における発光素子、受光素子の出力の時間変化を示す図
【発明を実施するための形態】
【0013】
第1の発明は、便座と、前記便座に使用者が着座していることを検出する着座検出手段と、使用者の局部を洗浄する洗浄手段と、使用者の人体の一部の所定の動作を非接触で検出する動作検出手段と、前記動作検出手段により検出した動作に対応して前記洗浄手段を制御する制御手段を有し、前記制御手段は前記着座検出手段により使用者の着座を検出しているときにのみ前記動作検出手段の検出を受け付ける構成としたものである。
【0014】
この構成により、着座検出手段が便座に使用者が着座していることを検出しているときに、動作検出手段が使用者の人体の一部の所定の動作を検出し、制御手段が検出した動作に対応して洗浄手段を制御するので、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0015】
第2の発明は、動作検出手段は、人体の一部が近接したことを検出する近接検出器を複数有する構成であり、この構成により複数の近接検出器にどういう順に近接したかによって人体の一部の移動方向を判定することができ、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0016】
第3の発明は、動作検出手段は、近接検出器を少なくとも3個有し、前記少なくとも3個の近接検出器が直線状に並んでいない構成で人体の一部の回転動作を検出する構成であり、この構成により、直線状に並んでいない少なくとも3個の近接検出器にどういう順に近接したかによって人体の一部の回転動作を検出するので、使用者が意図を持って行う回転動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0017】
第4の発明は、複数の近接検出器は、赤外線を検出する複数の赤外線検出器を有する構成であり、赤外線検出器は人体の一部から発する赤外線を検出することができ、それを複数配置した構成なので、複数の赤外線検出器がどういう順に人体を検出したかによって人体の一部の移動方向を判定することができて、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0018】
第5の発明は、複数の近接検出器は、発光素子と、複数配置し前記発光素子から発せら
れた光を受光する受光素子を有し、着座検出手段が使用者の着座を検出しているときにのみ前記発光素子を駆動する構成であり、この構成により着座検出手段が使用者の着座を検出しているときに発光素子を駆動し、発光素子から発せられた光が人体の一部に反射した光を複数の受光素子で受光するので、複数の受光素子がどういう順に受光したかによって人体の一部の移動方向を判定することができ、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0019】
(実施の形態1)
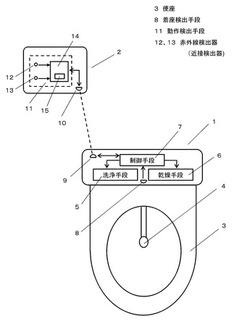
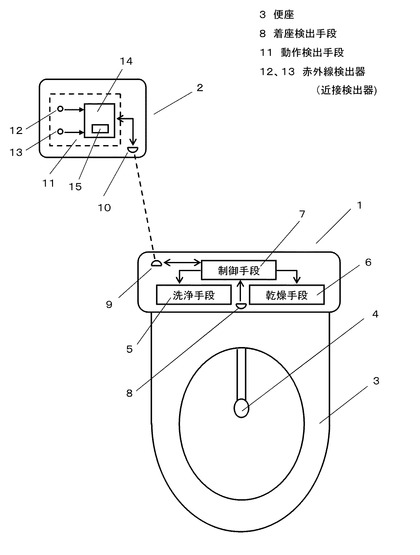
図1は本発明の第1の実施の形態におけるトイレ装置の全体構成を説明する図である。ここで本実施の形態におけるトイレ装置は本体1とリモコン2により構成している。
【0020】
本体1は使用者が着座する便座3と、使用者の局部に洗浄水を噴出する伸縮式の洗浄ノズル4と、洗浄ノズル4に温水を供給するポンプや水を加熱するヒータより成る洗浄手段5、局部を洗浄後に乾燥するための温風を供給するファンとモータや空気を加熱するためのヒータより成る乾燥手段6、そして洗浄手段5や乾燥手段6を制御する制御手段7、使用者が着座しているかどうかを検出するための着座検出手段8、リモコン2との通信を行うための送受信器9を備えている。
【0021】
着座検出手段8は発光素子と受光素子から成るPSD方式の距離検出器である。PSD方式の距離検出器は発光素子から発光された赤外線光が対象物に反射して受光素子に入光するときの位置から対象物までの距離を検出するものであり、対象物の反射率の影響を受けずに距離を検出できるものである。
【0022】
この着座検出手段8の距離検出により、使用者が便座3に着座していると、使用者のお尻や背中が近くにあるので反射物までの距離が短いことを検出するのに対して、着座していないときには、反射物までの距離を遠く検出することより、着座検出手段として使っている。
【0023】
送受信器9は赤外線の発光素子と受光素子から成り、リモコン2にも同じ構成の送受信器10を備えていて、本体1からリモコン2へ情報通信する際には本体1側の送受信器9の発光素子の発光パターンで送信し、リモコン2側の送受信器10の受光素子で受信する。本体側の送受信器9から送信する信号は着座検出手段8により使用者が着座しているかどうかを検出し、使用者が着座したとき、離座したときにそれぞれ信号送信する。
【0024】
逆にリモコン2から本体1へ情報通信する際にはリモコン2側の送受信器10の発光素子の発光パターンで送信し、本体1側の送受信器9の受光素子で受光する。
【0025】
リモコン2は、送受信器10と、人の手の近接と上下動作を検出する動作検出手段11とを含むものであり、動作検出手段11は、近接検出器である2つのサーモパイル型の赤外線センサ(第1の赤外線センサ12と第2の赤外線センサ13)と、2つの赤外線センサ12、13からの信号を処理する信号処理回路14を含む構成である。
【0026】
また信号処理回路14には後述する動作の判定のためにタイマー15を備えている。リモコン2は、本体1の設置されているトイレ空間などで本体1の横か、やや奥の使用者が手の届く範囲の壁などに取り付けている。
【0027】
第1の赤外線センサ12と第2の赤外線センサ13は上下に並べて設置していて、前記したようにいずれもサーモパイル型赤外線センサであり、その視野範囲の温度とセンサ自身の温度差に相関のある出力を発生するものである。
【0028】
一般に手のひらなど人体の表面温度は35℃ぐらいであり、一方センサ自身の温度はトイレ空間の室温に近いので、人体の表面温度の方が高温であり、手がセンサの視野に入るとプラス電圧を発生する。視野がトイレ空間の壁などの場合、視野の温度もセンサ自身の温度もほぼトイレ空間の室温で等しいので、電圧は発生しない。
【0029】
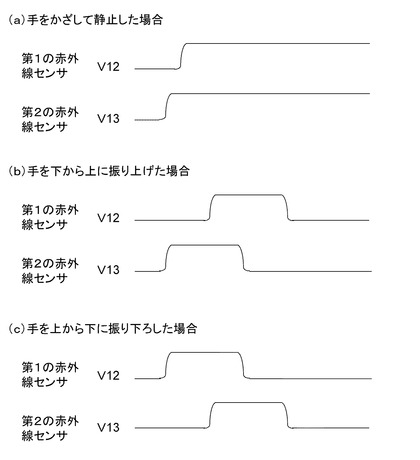
図2を用いて第1の赤外線センサ12と第2の赤外線センサ13の出力特性について説明する。図2においてV12は第1の赤外線センサ12の出力の時間変化であり、V13は第3の赤外線センサ13の出力の時間変化である。
【0030】
また図2(a)は2つの赤外線センサの前に手をかざして静止した場合、図2(b)は2つの赤外線センサの前で使用者が手を下から上に振り上げた場合、図2(c)は2つの赤外線センサの前で使用者が手を上から下に振り下ろした場合である。
【0031】
図2(a)において手をかざして静止した場合、第1の赤外線センサ12の出力V12、第2の赤外線センサ13の出力V13ともに手をかざしている間、プラス側の電圧を保持することになる。V12とV13の両方が所定電圧以上を所定時間以上、例えば2秒以上保持されれば手をかざして静止したものとして判定する。
【0032】
図2(b)において2つの赤外線センサの前で、使用者が手を下から上に振り上げた場合、まず下に取り付けている第2の赤外線センサ13の視野に手が入るとV13がプラス側の出力を発生し、続いて上に取り付けている第1の赤外線センサ12の視野に手が入ってV12がプラス側の出力を発生する。
【0033】
また、先に第2の赤外線センサ13の視野から手が消えてV13の出力が戻り、遅れて第1の赤外線センサ12の視野から手が消えてV12の出力が戻る。この出力の立ち上がり立ち下がりの順番から手を下から上に振り上げたものとして判定する。
【0034】
図2(c)において2つの赤外線センサの前で、使用者が手を上から下に振り下ろした場合、まず上に取り付けている第1の赤外線センサ12の視野に手が入るとV12がプラス側の出力を発生し、続いて下に取り付けている第2の赤外線センサ13の視野に手が入ってV13がプラス側の出力を発生する。
【0035】
また、先に第1の赤外線センサ12の視野から手が消えてV12の出力が戻り、遅れて第2の赤外線センサ13の視野から手が消えてV13の出力が戻る。この出力の立ち上がり立ち下がりの順番から手を上から下に振り下ろしたものとして判定する。
【0036】
信号処理回路14は、第1の赤外線センサ12、第2の赤外線センサ13、それぞれの増幅回路と増幅した信号を読み込み信号処理するマイコンを含むものであり、第1の赤外線センサ12、第2の赤外線センサ13の前で使用者が手をかざして静止したか、手を下から上に振り上げたか、手を上から下に振り下ろしたか、図2(a)、(b)、(c)のうちのいずれのパターンかを判定する。
【0037】
信号処理回路14がこれらの判定を行うのは、使用者が着座しているときだけであり、着座検出手段8により使用者の着座が検出され、本体1の送受信器9からリモコン2の送受信器10に着座の信号を受信したら、判定を開始し、離座の信号を受信したら判定は終了する。そして判定結果を、送受信器10から送信し、本体1の送受信器9で受信する。
【0038】
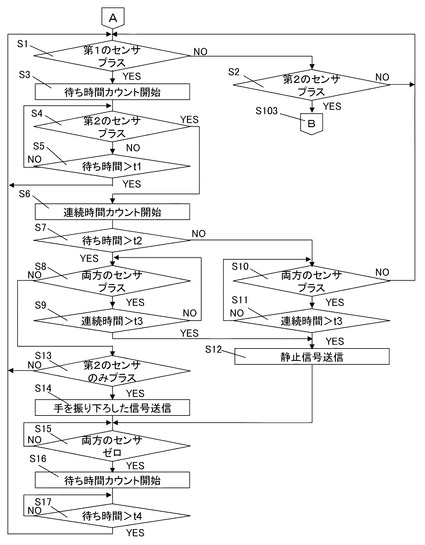
図3のフローチャートを用いて、信号処理回路の判定の動作の流れを説明する。図3において、信号処理回路14は、まずステップS1で第1の赤外線センサ12がプラス出力を発生したかどうかを判定し、プラス出力を発生していればステップS3に進む一方、発
生していなければステップS2に進む。
【0039】
ステップS2では第2の赤外線センサ13がプラス出力を発生しているかどうかを判定し、プラス出力を発生していなければステップS1に戻る。発生しているときにはステップS103に進む。ステップS103以降については図4にて説明する。
【0040】
ステップS3ではタイマー15により待ち時間のカウントをスタートしてステップS4に進む。ステップS4では、次に第2の赤外線センサ13がプラス出力を発生しているかどうかを判定し、プラス出力が発生していなければステップS5に進む一方、発生していればステップS6に進む。
【0041】
ステップS5ではステップS3でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。そしてt1を過ぎてしまうとステップS1に戻る一方、まだ過ぎていなければステップS4に戻って第2の赤外線センサ13がプラス出力を発生するのを待つ。
【0042】
ここで待ち時間がt1を過ぎたときは、第1の赤外線センサ12だけの前で手をかざして長時間が経過した状態であるので、使用者が手を上下動作させたのではなく、また両方のセンサの前で手をかざして静止したのでもないと判断する。
【0043】
ここで所定時間t1は通常、人が手を振り上げたり振り下ろしたりすると、第1の赤外線センサ12と第2の赤外線センサ13の間を通過するのに要する時間にある程度の時間を加え、例えば0.3秒という程度である。
【0044】
ステップS6では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力をしている連続時間をタイマー15によりカウント開始し、ステップS7に進む。
【0045】
ステップS7では、第1の赤外線センサ12のプラス出力を検出してから第2の赤外線センサ13のプラス出力を検出するまでの時間が短すぎないかを確認するのであるが、ステップS3でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定する。
【0046】
そしてt2を過ぎていればステップS8に進む一方、まだt2に達していなければステップS10に進む。ここでt2は手を上から下に振り下ろすときに第1の赤外線センサ12から第2の赤外線センサ13まで移動に要する時間より短い十分短い時間で、例えば0.05秒程度である。
【0047】
ステップS8では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力を発生しているかを判定し、両方がプラス出力であればステップS9に進む一方、どちらかがプラス出力でなければステップS13に進む。
【0048】
ステップS9ではステップS6でカウントを開始した両方のセンサがプラス出力を発生してからの連続時間が予め定めた時間t3を過ぎたかどうかを判定する。過ぎていれば両方のセンサの前で手をかざして静止されていると判断しステップS12に進んで送受信器10より静止信号を送信しステップS15に進む。またt3を過ぎていなければステップS8に戻って処理を繰り返す。
【0049】
ステップS10は第1の赤外線センサ12がプラス出力を発生してから第2の赤外線センサ13がプラス出力を発生するまでの時間が短すぎる場合の処理であり、手が上から下に移動するのでなく、右からか左から両方のセンサにほぼ同時に近付いてきた場合の処理
である。
【0050】
ここでも第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力を発生しているかを判定し、両方がプラス出力であればS11に進む一方、どちらかがプラス出力でなければ、これは手が左右に移動するなど所定の動作以外の動作であると考えられるので、ステップS1に戻る。
【0051】
ステップS11ではステップS9と同様、両方のセンサがプラス出力を発生してからの連続時間が予め定めた時間t3を過ぎたかどうかを判定し、過ぎていれば両方のセンサの前で手をかざして静止されていると判断しステップS12に進んで送受信器10より静止信号を送信しステップS15に進む。またt3を過ぎていなければステップS10に戻って処理を繰り返す。
【0052】
ここで使用者が手を両方のセンサの前で手をかざして静止する状態を判定するための、プラス出力を発生し続ける連続時間のt3については、不意に両方のセンサの前に手が近付いてしまうことと区別するために、ある程度の長さを持たせた例えば2秒ぐらいである。
【0053】
ステップS13においては第2の赤外線センサ13がプラス出力で第1の赤外線センサ12はプラス出力を発生していない状態かどうかを判定する。
【0054】
その状態であれば第1の赤外線センサ12がプラス出力になった後、t2時間以上経過した後、第2の赤外線センサ13がプラス出力になり、そして第2の赤外線センサ13がプラス出力の間に第1の赤外線センサ12がプラス出力ではなくなったので、図2(c)に示す状態であるのでステップS14に進み送受信器10より手を振り下ろした信号を送信し、そしてステップS15に進む。
【0055】
一方、ステップS13において第2の赤外線センサ13がプラス出力で第1の赤外線センサ12はプラス出力を発生していない状態でなければ、図2(a)、(b)、(c)に示すいずれのパターンでもないので使用者が所定の動作をしたものではないと判定し、ステップS1に戻る。
【0056】
ステップS15以降は、次に使用者が所定の動作を行うことを受け付けることができる状態になるのを待つための信号処理の流れであり、まずステップS15で第1の赤外線センサ12、第2の赤外線センサ13の両方の出力がプラスではなくゼロ出力になっているかどうかを判定する。
【0057】
そして両方がゼロ出力になっていればステップS16に進む一方、どちらかがプラス出力であればステップS15に戻り、両方がゼロ出力になることを待つ。
【0058】
そしてステップS16ではタイマー15により、再度待ち時間のカウントを開始しステップS17に進む。ステップS17ではステップS16でカウントを開始した待ち時間が予め定めた所定時間t4を経過したかどうかを判定する。経過していなければステップS17に戻って経過するのを待つ。経過すればステップS1に戻って、再び第1の赤外線センサ12の出力を確認することを繰り返す。
【0059】
ここで所定時間t4だけ待つのは、手の上下動作を確定した直後に、そこから戻すための上下動作があっても、それを検出しないようにするためであり、例えば1秒程度である。
次に図4のフローチャートを用いて、使用者が手を振り上げる動作を検出する信号処理の
流れについて説明する。
【0060】
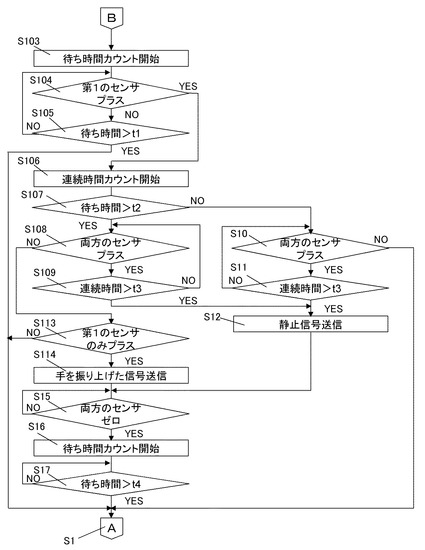
前記した図3の説明の中で、ステップS1で第1の赤外線センサ12がプラス出力でなく、ステップS2で第2の赤外線センサがプラス出力であった場合に、図4のステップS103から処理を行う。
【0061】
ステップS103ではタイマー15により待ち時間のカウントをスタートしてステップS104に進む。ステップS104では、次に第1の赤外線センサ12がプラス出力を発生しているかどうかを判定し、プラス出力が発生していなければステップS105に進む一方、発生していれステップS106に進む。
【0062】
ステップS105ではステップS103でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。
【0063】
そしてt1を過ぎてしまうとステップS1に戻る一方、まだ過ぎていなければステップS104に戻って第1の赤外線センサ12がプラス出力を発生するのを待つ。ここで待ち時間がt1を過ぎたときは、第2の赤外線センサ13だけの前で手をかざして長時間が経過した状態であるので、使用者が手を上下動作させたのではなく、また両方のセンサの前で手をかざして静止したのでもないと判断する。
【0064】
ステップS106では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力をしている連続時間をタイマー15によりカウント開始し、ステップS107に進む。
【0065】
ステップS107では、第2の赤外線センサ13のプラス出力を検出してから第1の赤外線センサ12のプラス出力を検出するまでの時間が短すぎないかを確認するのであるが、ステップS103でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定する。そしてt2を過ぎていればステップS108に進む一方、まだt2に達していなければステップS10に進む。
【0066】
ステップS108では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力を発生しているかを判定し、両方がプラス出力であればステップS109に進む一方、どちらかがプラス出力でなければステップS113に進む。
【0067】
ステップS109ではステップS106でカウントを開始した両方のセンサがプラス出力を発生してからの連続時間が予め定めた時間t3を過ぎたかどうかを判定する。過ぎていれば両方のセンサの前で手をかざして静止されていると判断しステップS12に進んで送受信器10より静止信号を送信しステップS15に進む。またt3を過ぎていなければステップS108に戻って処理を繰り返す。
【0068】
ステップS10からステップS12については、前記した図3の説明と同様であり、説明を省略する。
【0069】
ステップS113においては第1の赤外線センサ12がプラス出力で第2の赤外線センサ13はプラス出力を発生していない状態かどうかを判定する。
【0070】
その状態であれば第2の赤外線センサ13がプラス出力になった後、t2時間以上経過した後、第1の赤外線センサ12がプラス出力になり、そして第1の赤外線センサ12がプラス出力の間に第2の赤外線センサ13がプラス出力ではなくなったので、図2(b)に示す状態であるのでステップS114に進み送受信器10より手を振り上げた信号を送
信し、そしてステップS15に進む。
【0071】
一方、ステップS113において第1の赤外線センサ12がプラス出力で第2の赤外線センサ13はプラス出力を発生していない状態でなければ、図2(a)、(b)、(c)に示すいずれのパターンでもないので使用者が所定の動作をしたものではないと判定し、ステップS1に戻る。
【0072】
ステップS15からステップS17については、前記した図3の説明と同様であり、説明を省略する。
【0073】
次に図5のフローチャートを用いて、本体1の制御手段7の動作の流れについて説明する。
【0074】
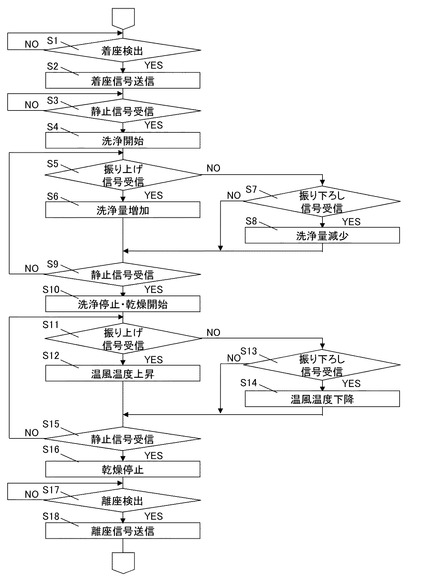
本体1の制御手段7はまずステップS1で着座検出手段8により使用者が着座しているかどうかを判定し、着座を検出すればステップS2に進む一方、検出しなければステップS1に戻って着座検出するのを待つ。ステップS2では送受信器9により着座信号を送信してリモコン2においての所定の動作検出を開始させ、ステップS3に進む。
【0075】
ステップS3ではリモコン2から使用者が手をかざして静止したときに送られる静止信号を受信したかどうかを判断し、静止信号を受信すればステップS4に進んで洗浄手段5を駆動して洗浄を開始しステップS5に進む。一方、静止信号を受信しなければステップS3に戻って静止信号を受信するまで待つ。
【0076】
ステップS5ではリモコン2から使用者が手を振り上げた信号を受信したかどうかを判断し、受信すればステップS6に進む一方、受信しなければステップS7に進む。ステップS6では使用者が手を振り上げた動作に対応して洗浄手段5を制御して洗浄流量を増加させ、ステップS9に進む。
【0077】
またステップS7ではリモコン2から使用者が手を振り下ろした信号を受信したかどうかを判断し、受信すればステップS8に進む一方、受信しなければステップS9に進む。ステップS8では使用者が手を振り下ろした動作に対応して洗浄手段5を制御して洗浄流量を減少させ、ステップS9に進む。
【0078】
ステップS9ではリモコン2から静止信号を受信したかどうかを判断し、静止信号を受信すれば洗浄終了としてステップS10に進んで洗浄手段5を停止し、引き続き乾燥手段6を駆動して乾燥を開始し、ステップS11に進む。一方、ステップS9において静止信号を受信しなければステップS5に戻り、使用者の手の上下動作の信号受信判断とそれに対応する洗浄量の増減制御を繰り返す。
【0079】
ステップS11ではリモコン2から使用者が手を振り上げた信号を受信したかどうかを判断し、受信すればステップS12に進む一方、受信しなければステップS13に進む。
【0080】
ステップS12では使用者が手を振り上げた動作に対応して乾燥手段6を制御して温風の温度を上昇させ、ステップS15に進む。またステップS13ではリモコン2から使用者が手を振り下ろした信号を受信したかどうかを判断し、受信すればステップS14に進む一方、受信しなければステップS15に進む。
【0081】
ステップS14では使用者が手を振り下ろした動作に対応して乾燥手段6を制御して温風温度を下降させ、ステップS15に進む。
【0082】
ステップS15ではリモコン2から静止信号を受信したかどうかを判断し、静止信号を受信すれば乾燥終了としてステップS16に進んで乾燥手段6を停止し、ステップS17に進む。一方、ステップS15において静止信号を受信しなければステップS11に戻り、使用者の手の上下動作の信号受信判断とそれに対応する温風温度の上昇下降制御を繰り返す。
【0083】
洗浄量と温風温度は、例えば5段階の複数段階を予め設定していて、静止信号を受信してステップS4で洗浄を開始したり、ステップS10で乾燥を開始したりするときには、中央の段階の例えば3段階目の出力で開始し、以後、振り上げ信号を受信すれば1段階上昇させ、振り下ろし信号を受信すれば1段階下降させるなどして、洗浄量や温風温度を制御するものである。
【0084】
ステップS17では使用者が着座検出手段8により、使用者が便座を離れたかどうか、離座検出を行う。離座を検出するとステップS18に進み、離座信号を送信して処理を終了する。一方、ステップS17で離座を検出しなかった場合には、ステップS17に戻り、離座を検出するまで検出を繰り返す。
【0085】
以上、図3〜5で説明したリモコン2の信号処理回路14の動作と、本体1の制御手段7の動作で、使用者が便座3に着座すると使用者の所定の動作の検出が始まり、第1の赤外線センサ12と第2の赤外線センサ13の前に使用者が手をかざして静止すると洗浄が始まり、使用者が2つのセンサの前で手を上下動作することで洗浄量の増減を制御する。
【0086】
再び使用者が2つのセンサの前で手を静止すると洗浄が終了して乾燥が始まり、更に使用者が2つのセンサの前で手を上下動作することで温風温度の上昇下降を制御し、更に使用者が2つのセンサの前で手を静止することで乾燥が終了する。そして使用者が離座すると、所定の動作の検出が終了する。
【0087】
以上のように本発明の実施の形態1によれば、複数の近接検出器をサーモパイルの赤外線センサとしたことで、使用者の手が赤外線センサの視野に入ることで生じるセンサ自身の温度と視野対象物の温度の温度差により出力が発生する、その順により手を上から下に振り下ろしたのか、下から上に振り上げたのかを判定することができ、その上下動作に連動するように洗浄を制御することが可能となる。
【0088】
なお、本実施の形態1では近接検出器としてサーモパイルの赤外線センサを用いたが、焦電型赤外線センサを用いても同様の効果を得られるものである。焦電型赤外線センサは視野対象物の温度変化により出力を発生するので、その出力は図2に示した出力の時間変化を微分したような形となる。
【0089】
したがって信号処理回路14において、ソフト的またはハード的に積分演算を行えば図2に示した出力の時間変化と同様の出力が得られるので、同じように処理をして同様の効果が得られる。他にも、2枚の電極を備えた構成にして、信号処理回路において電極における静電容量を測定することで、手が近付いたことを検出するという方法もある。
【0090】
(実施の形態2)
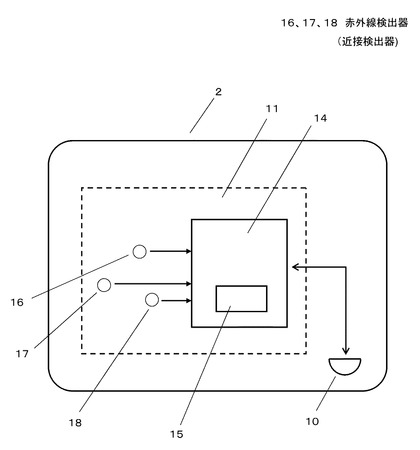
次に本発明の第2の実施の形態について説明する。第2の実施の形態において、第1の実施の形態と異なるところは動作検出手段11であり、図6は動作検出手段11を含むリモコン2の構成を説明する図である。図6において図1と同じ機能を有するものには同じ番号を付し、説明を省略する。
【0091】
図6において第3の赤外線センサ16、第4の赤外線センサ17、第5の赤外線センサ
18はいずれもサーモパイルの赤外線センサであり、それらは近接検出器として機能する。
【0092】
そしてこの3個の赤外線センサはほぼ正三角形の頂点のように配置していて、直線上に並んでいるようなものではない。この構成で、使用者が手を回転させる動作で時計回りの回転か反時計回りの回転かを検出する。
【0093】
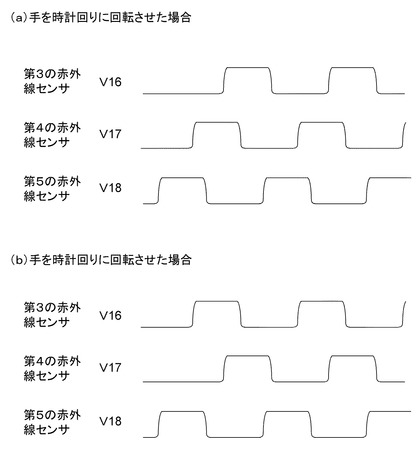
図7を用いて第3の赤外線センサ16と第4の赤外線センサ17と第5の赤外線センサ18の出力特性について説明する。図7においてV16は第3の赤外線センサ16の出力の時間変化であり、V17は第4の赤外線センサ17の出力の時間変化であり、V18は第5の赤外線センサ18の出力の時間変化である。
【0094】
そして図7(a)は3つの赤外線センサの前で使用者が手を時計方向に連続で回転させた場合、図7(b)は3つの赤外線センサの前で使用者が手を反時計方向に連続で回転させた場合である。
【0095】
図7(a)では、第5の赤外線センサ18、第4の赤外線センサ17、第3の赤外線センサ16の順に使用者の手がセンサの視野に入る。したがって、V18、V17、V16の順にプラス出力を発生し、また出力がゼロに戻るのもV18、V17、V16の順である。
【0096】
また図7(b)では、第5の赤外線センサ18、第3の赤外線センサ16、第4の赤外線センサ17の順に使用者の手がセンサの視野に入る。したがって、V18、V16、V17の順にプラス出力を発生し、また出力がゼロに戻るのもV18、V16、V17の順である。
【0097】
そして信号処理回路14では、例えばV18がプラス出力に立ち上がったところを起点として、次にV18がプラス出力に立ち上がるまでにV17、V16の順にプラス出力に立ち上がっていれば時計回りに1回転として送受信器9から本体1の送受信器10に信号を送信する。
【0098】
また、V18がプラス出力に立ち上がったところを起点として、次にV18がプラス出力に立ち上がるまでにV16、V17の順にプラス出力に立ち上がっていれば反時計回りに1回転として送受信器9から本体1の送受信器10に信号を送信する。
【0099】
そして本体1の制御手段7は、時計回りの回転動作の信号を受信すると洗浄量を1ステップ増加、または乾燥温度を1ステップ上昇させるように制御し、逆に反時計回りの回転動作の信号を受信すると洗浄量を1ステップ減少、または乾燥温度を1ステップ下降させるように制御する。
【0100】
以上のように本発明の実施の形態2によれば、3個のサーモパイル赤外線センサにより、その出力がプラスに転じる順により時計回りの回転動作なのか、反時計回りの回転動作なのかを判定することができ、その回転動作に連動するように洗浄を制御することが可能となる。
【0101】
そして実施の形態1の上下動作とは違って、時計回りであれば時計回りの連続動作、反時計回りであれば反時計回りの連続動作として、2回転、3回転、・・・と動作を連続し易く、使用者にとって洗浄の調整などの使い勝手が良い。
【0102】
また、3個のサーモパイル赤外線センサの前で使用者が手を静止させると、3個とも全
てプラスの出力を発生させるので、それが所定時間以上続いたことで、使用者が手をかざして静止させたことを検出することもでき、実施の形態1と同様に、手をかざして静止することで、洗浄の開始、洗浄の停止と乾燥の開始、乾燥の終了を切り替えることも可能である。
【0103】
また、本実施の形態2では、実施の形態1と同様に近接検出器としてサーモパイルの赤外線センサを用いたが、焦電型赤外線センサを用いても同様の効果を得られるものである。他にも、3枚の電極を備えた構成にして、信号処理回路において電極における静電容量を測定することで、手が近付いたことを検出するという方法もある。また近接検出器を4個以上使うことで、より精度よく回転動作を検出しても良い。
【0104】
(実施の形態3)
次に本発明の第3の実施の形態について説明する。第3の実施の形態において、第1、第2の実施の形態と異なるところは動作検出手段11の部分であり、図8は動作検出手段11を含むリモコン2の構成を説明する図である。図8において図1、図6と同じ機能を有するものには同じ番号を付し、説明を省略する。
【0105】
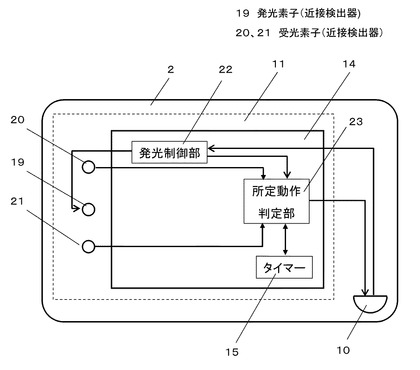
図8において、19は発光素子で赤外発光ダイオードであり、それに対してフォトダイオードより成る受光素子が2つある。第1の受光素子20は、発光素子19より上方に配置し、第2の受光素子21は発光素子19より下方に配置している。第1の受光素子20と第2の受光素子21は、それぞれ発光素子19との間に一定の間隔を開けて配置したものであり、その間隔は例えば5cmぐらいである。これら発光素子19、第1の受光素子20、第2の受光素子21により近接検出器が構成される。
【0106】
そして発光素子19が点灯して出力された赤外光がその前の物体で反射すると、第1の受光素子20や第2の受光素子21が受光して出力を発生する。第1の受光素子20、第2の受光素子21の出力は、前方の物体までの距離が10cmぐらいまでの距離に人体の一部、例えば使用者の手が近接すればそれを検出することができる。
【0107】
信号処理回路14にはタイマー15の他、送受信器10が受信した信号に基づき発光素子19の発光を制御する発光制御部22と、2つの受光素子20、21からの入力により、上から下への振り下ろし動作か、下から上への振り上げ動作か、あるいは静止かを判定する所定動作判定部23を有する。
【0108】
本体1の送受信器9から使用者の着座を検出した信号が送信されると、リモコン2の送受信器10がその信号を受信し、それに基づき発光素子19を所定パターンで点滅を開始し、使用者の離座を検出した信号を受信すると、それに基づき発光素子19の点滅を終了して消灯する。
【0109】
所定動作判定部23は、発光素子19による点滅開始から終了までの間、即ち使用者が着座してから離座するまでの間、使用者が所定の動作を行ったかどうかを判定する。
【0110】
図9は発光素子19、および第1の受光素子20、第2の受光素子21の前で、使用者が手を上下動作させた場合の、それぞれの素子の出力の時間的変化を示すタイミングチャートである。図9(a)は手を下から上に振り上げた場合であり、図9(b)は手を上から下に振り下ろした場合であり、またI19は発光素子19の出力、V20は第1の受光素子20の出力、V21は第2の受光素子21の出力の時間変化である。
【0111】
図9において、まず発光制御部22が送受信器10から着座信号を受信すると発光素子19を所定のパターンで点滅させる。図9(a)に示すように、使用者の手が下に取り付
けられた第2の受光素子21に近付くと、発光素子19で発光した光は手で反射して第2の受光素子21が受光する。
【0112】
第2の受光素子21は発光素子19の点滅パターンと一致する出力を発生する。その後、上に取り付けている第1の受光素子20に使用者の手が近付くと、発光素子19で発光した光は手で反射して第1の受光素子20が受光する。
【0113】
第1の受光素子20は発光素子19の点滅パターンと一致する出力を発生する。このように第2の受光素子21、第1の受光素子20の順で出力の発生があれば、所定動作判定部23は手が下から上に振り上げられたと判定する。
【0114】
また、図9(b)に示すように、使用者の手が上に取り付けられた第1の受光素子20に近付くと、発光素子19で発光した光は手で反射して第1の受光素子20が受光する。第1の受光素子20は発光素子19の点滅パターンと一致する出力を発生する。
【0115】
その後、下に取り付けている第2の受光素子21に使用者の手が近付くと、発光素子19で発光した光は手で反射して第2の受光素子21が受光する。第2の受光素子21は発光素子19の点滅パターンと一致する出力を発生する。このように第1の受光素子20、第2の受光素子21の順で出力の発生があれば、所定動作判定部23は手が上から下に振り下ろされたと判定する。
【0116】
ぞして図9において、発光制御部22が送受信器10から離座信号を受信すると発光素子19の点滅を停止し、消灯する。
【0117】
以上のように本発明の実施の形態3によれば、発光素子と2個の受光素子により、発光素子の点滅パターンと同じパターンの出力があれば受光したものとして、その受光の順番より手が下から上に振り上げられたのか、上から下に振り下ろされたのかを判定することができる。
【0118】
またこの2個の受光素子の前で使用者が手を静止させると、2個とも発光素子19の点滅パターンと同じ出力を発生するので、それが所定時間以上続いたことで、使用者が手をかざして静止させることも検出でき、実施の形態1と同様に、洗浄量の増減や乾燥温風温度の上昇下降、更には洗浄の開始、洗浄の停止と乾燥の開始、乾燥の終了を切り替えることも可能である。
【0119】
そして、発光素子19は所定のパターンで点滅していて、2個の受光素子が同じパターンの出力を発生しているかで、手が近付いたことを判定しているので、発光素子19以外の光、例えば窓などから入ってくる太陽の光や、照明器具の光などと区別することができ、動作判定の信頼性を高めることができる。
【0120】
また、以上説明してきた実施の形態1から4において、動作検出手段は着座検出手段で使用者が着座していることを検出しているときにだけ所定の動作を検出するものとしているので、動作検出のための消費電流を低減することができ、電池電源のリモコンであっても、発光素子を発光させて動作を検出するようなことも可能となる。
【産業上の利用可能性】
【0121】
以上のように本発明は、動作検出手段により人体の一部の所定の動作を検出し、制御手段によって検出した所定の動作に対応して洗浄手段を制御するので、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となるので、トイレ装置の各種機能として適用できる他、手が汚れたり濡れたりしているときに、
操作したいような機器にも利用可能である。
【符号の説明】
【0122】
1 本体
2 リモコン
3 便座
4 洗浄ノズル
5 洗浄手段
6 乾燥手段
7 制御手段
8 着座検出手段
9、10 送受信器
11 動作検出手段
12、13、16、17、18 赤外線センサ
14 信号処理回路
15 タイマー
19 発光素子
20、21 受光素子
【技術分野】
【0001】
本発明は、便器を使用する使用者の動作を検出し、トイレの各種制御を行うトイレ装置に関するものであり、特に使用者が人体の一部を予め定めた所定の動作を行うこと検出して局部の洗浄を制御する装置に関するものである。
【背景技術】
【0002】
従来トイレ装置は、使用者が座る便座と、使用者の局部を洗浄するために温水を供給するノズルと、使用者の局部を乾燥するために温風を送風する送風ファンを備え、使用者の操作により温水の供給、温風の送風を制御するもので、そのON/OFFや強弱の設定などを行うスイッチを備えていた。このような従来のトイレ装置では、使用者は局部の洗浄や乾燥のために指でスイッチに接触して操作しなければならなかった。
【0003】
そうした操作を非接触で行えるようにしたものとして、トイレ装置の操作部に物体までの距離を非接触で検出する距離検出器を備え、使用者が操作部に手をかざし、更に操作部に手を近づけたり遠ざけたりすることで、洗浄や送風のON/OFF、強弱の調整をできるようにしたものがある。
【0004】
そうすることで、衛生面を気にする使用者に、トイレ空間でできるだけ物に手を触れないでいられるようにして快適性を確保する効果がある(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−88872号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の方法では、操作する目的以外で操作部に使用者の人体の一部が近付いてしまうと誤動作してしまうという課題がある。操作部は操作しやすいように手の届きやすい箇所に設けるものであるが、そうすると操作する以外の時でも操作部には手など使用者の人体の一部がどうしても近付きやすくなってしまう。
【0007】
距離検出器を使った方法で、使用者が操作のために手を近付けたり遠ざけたりしているのか、そうではなく不意に使用者の手など人体の一部が近付いたり遠ざかったりしているのかを区別することは困難であり、そのために前記従来の方法は洗浄や送風が使用者の意図と違った制御になってしまう誤動作が生じやすいという課題があった。
【0008】
本発明は、上記課題を解決するものであり、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに洗浄を制御するトイレ装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のトイレ装置は、便座と、前記便座に使用者が着座していることを検出する着座検出手段と、使用者の局部を洗浄する洗浄手段と、使用者の人体の一部の所定の動作を非接触で検出する動作検出手段と、前記動作検出手段により検出した動作に対応して前記洗浄手段を制御する制御手段を有し、前記制御手段は前記着座検出手段により使用者の着座を検出しているときにのみ前記動作検出手段の検出を受け付ける構成としたものである。
【0010】
この構成により、着座検出手段が便座に使用者が着座していることを検出しているときに、動作検出手段が使用者の人体の一部の所定の動作を検出し、制御手段が検出した動作に対応して洗浄手段を制御するので、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに洗浄を制御することが可能となる。
【発明の効果】
【0011】
本発明によれば、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに洗浄を制御することが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1におけるトイレ装置の構成図
【図2】同実施の形態における複数の赤外線センサの出力の時間変化を示す図
【図3】同実施の形態における信号処理回路の動作を説明するフローチャート
【図4】同実施の形態における信号処理回路の動作を説明するフローチャート
【図5】同実施の形態における制御手段の動作を説明するフローチャート
【図6】本発明の実施の形態2におけるトイレ装置のリモコンの構成図
【図7】同実施の形態における複数の赤外線センサの出力の時間変化を示す図
【図8】本発明の実施の形態2におけるトイレ装置のリモコンの構成図
【図9】同実施の形態における発光素子、受光素子の出力の時間変化を示す図
【発明を実施するための形態】
【0013】
第1の発明は、便座と、前記便座に使用者が着座していることを検出する着座検出手段と、使用者の局部を洗浄する洗浄手段と、使用者の人体の一部の所定の動作を非接触で検出する動作検出手段と、前記動作検出手段により検出した動作に対応して前記洗浄手段を制御する制御手段を有し、前記制御手段は前記着座検出手段により使用者の着座を検出しているときにのみ前記動作検出手段の検出を受け付ける構成としたものである。
【0014】
この構成により、着座検出手段が便座に使用者が着座していることを検出しているときに、動作検出手段が使用者の人体の一部の所定の動作を検出し、制御手段が検出した動作に対応して洗浄手段を制御するので、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0015】
第2の発明は、動作検出手段は、人体の一部が近接したことを検出する近接検出器を複数有する構成であり、この構成により複数の近接検出器にどういう順に近接したかによって人体の一部の移動方向を判定することができ、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0016】
第3の発明は、動作検出手段は、近接検出器を少なくとも3個有し、前記少なくとも3個の近接検出器が直線状に並んでいない構成で人体の一部の回転動作を検出する構成であり、この構成により、直線状に並んでいない少なくとも3個の近接検出器にどういう順に近接したかによって人体の一部の回転動作を検出するので、使用者が意図を持って行う回転動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0017】
第4の発明は、複数の近接検出器は、赤外線を検出する複数の赤外線検出器を有する構成であり、赤外線検出器は人体の一部から発する赤外線を検出することができ、それを複数配置した構成なので、複数の赤外線検出器がどういう順に人体を検出したかによって人体の一部の移動方向を判定することができて、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0018】
第5の発明は、複数の近接検出器は、発光素子と、複数配置し前記発光素子から発せら
れた光を受光する受光素子を有し、着座検出手段が使用者の着座を検出しているときにのみ前記発光素子を駆動する構成であり、この構成により着座検出手段が使用者の着座を検出しているときに発光素子を駆動し、発光素子から発せられた光が人体の一部に反射した光を複数の受光素子で受光するので、複数の受光素子がどういう順に受光したかによって人体の一部の移動方向を判定することができ、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となる。
【0019】
(実施の形態1)
図1は本発明の第1の実施の形態におけるトイレ装置の全体構成を説明する図である。ここで本実施の形態におけるトイレ装置は本体1とリモコン2により構成している。
【0020】
本体1は使用者が着座する便座3と、使用者の局部に洗浄水を噴出する伸縮式の洗浄ノズル4と、洗浄ノズル4に温水を供給するポンプや水を加熱するヒータより成る洗浄手段5、局部を洗浄後に乾燥するための温風を供給するファンとモータや空気を加熱するためのヒータより成る乾燥手段6、そして洗浄手段5や乾燥手段6を制御する制御手段7、使用者が着座しているかどうかを検出するための着座検出手段8、リモコン2との通信を行うための送受信器9を備えている。
【0021】
着座検出手段8は発光素子と受光素子から成るPSD方式の距離検出器である。PSD方式の距離検出器は発光素子から発光された赤外線光が対象物に反射して受光素子に入光するときの位置から対象物までの距離を検出するものであり、対象物の反射率の影響を受けずに距離を検出できるものである。
【0022】
この着座検出手段8の距離検出により、使用者が便座3に着座していると、使用者のお尻や背中が近くにあるので反射物までの距離が短いことを検出するのに対して、着座していないときには、反射物までの距離を遠く検出することより、着座検出手段として使っている。
【0023】
送受信器9は赤外線の発光素子と受光素子から成り、リモコン2にも同じ構成の送受信器10を備えていて、本体1からリモコン2へ情報通信する際には本体1側の送受信器9の発光素子の発光パターンで送信し、リモコン2側の送受信器10の受光素子で受信する。本体側の送受信器9から送信する信号は着座検出手段8により使用者が着座しているかどうかを検出し、使用者が着座したとき、離座したときにそれぞれ信号送信する。
【0024】
逆にリモコン2から本体1へ情報通信する際にはリモコン2側の送受信器10の発光素子の発光パターンで送信し、本体1側の送受信器9の受光素子で受光する。
【0025】
リモコン2は、送受信器10と、人の手の近接と上下動作を検出する動作検出手段11とを含むものであり、動作検出手段11は、近接検出器である2つのサーモパイル型の赤外線センサ(第1の赤外線センサ12と第2の赤外線センサ13)と、2つの赤外線センサ12、13からの信号を処理する信号処理回路14を含む構成である。
【0026】
また信号処理回路14には後述する動作の判定のためにタイマー15を備えている。リモコン2は、本体1の設置されているトイレ空間などで本体1の横か、やや奥の使用者が手の届く範囲の壁などに取り付けている。
【0027】
第1の赤外線センサ12と第2の赤外線センサ13は上下に並べて設置していて、前記したようにいずれもサーモパイル型赤外線センサであり、その視野範囲の温度とセンサ自身の温度差に相関のある出力を発生するものである。
【0028】
一般に手のひらなど人体の表面温度は35℃ぐらいであり、一方センサ自身の温度はトイレ空間の室温に近いので、人体の表面温度の方が高温であり、手がセンサの視野に入るとプラス電圧を発生する。視野がトイレ空間の壁などの場合、視野の温度もセンサ自身の温度もほぼトイレ空間の室温で等しいので、電圧は発生しない。
【0029】
図2を用いて第1の赤外線センサ12と第2の赤外線センサ13の出力特性について説明する。図2においてV12は第1の赤外線センサ12の出力の時間変化であり、V13は第3の赤外線センサ13の出力の時間変化である。
【0030】
また図2(a)は2つの赤外線センサの前に手をかざして静止した場合、図2(b)は2つの赤外線センサの前で使用者が手を下から上に振り上げた場合、図2(c)は2つの赤外線センサの前で使用者が手を上から下に振り下ろした場合である。
【0031】
図2(a)において手をかざして静止した場合、第1の赤外線センサ12の出力V12、第2の赤外線センサ13の出力V13ともに手をかざしている間、プラス側の電圧を保持することになる。V12とV13の両方が所定電圧以上を所定時間以上、例えば2秒以上保持されれば手をかざして静止したものとして判定する。
【0032】
図2(b)において2つの赤外線センサの前で、使用者が手を下から上に振り上げた場合、まず下に取り付けている第2の赤外線センサ13の視野に手が入るとV13がプラス側の出力を発生し、続いて上に取り付けている第1の赤外線センサ12の視野に手が入ってV12がプラス側の出力を発生する。
【0033】
また、先に第2の赤外線センサ13の視野から手が消えてV13の出力が戻り、遅れて第1の赤外線センサ12の視野から手が消えてV12の出力が戻る。この出力の立ち上がり立ち下がりの順番から手を下から上に振り上げたものとして判定する。
【0034】
図2(c)において2つの赤外線センサの前で、使用者が手を上から下に振り下ろした場合、まず上に取り付けている第1の赤外線センサ12の視野に手が入るとV12がプラス側の出力を発生し、続いて下に取り付けている第2の赤外線センサ13の視野に手が入ってV13がプラス側の出力を発生する。
【0035】
また、先に第1の赤外線センサ12の視野から手が消えてV12の出力が戻り、遅れて第2の赤外線センサ13の視野から手が消えてV13の出力が戻る。この出力の立ち上がり立ち下がりの順番から手を上から下に振り下ろしたものとして判定する。
【0036】
信号処理回路14は、第1の赤外線センサ12、第2の赤外線センサ13、それぞれの増幅回路と増幅した信号を読み込み信号処理するマイコンを含むものであり、第1の赤外線センサ12、第2の赤外線センサ13の前で使用者が手をかざして静止したか、手を下から上に振り上げたか、手を上から下に振り下ろしたか、図2(a)、(b)、(c)のうちのいずれのパターンかを判定する。
【0037】
信号処理回路14がこれらの判定を行うのは、使用者が着座しているときだけであり、着座検出手段8により使用者の着座が検出され、本体1の送受信器9からリモコン2の送受信器10に着座の信号を受信したら、判定を開始し、離座の信号を受信したら判定は終了する。そして判定結果を、送受信器10から送信し、本体1の送受信器9で受信する。
【0038】
図3のフローチャートを用いて、信号処理回路の判定の動作の流れを説明する。図3において、信号処理回路14は、まずステップS1で第1の赤外線センサ12がプラス出力を発生したかどうかを判定し、プラス出力を発生していればステップS3に進む一方、発
生していなければステップS2に進む。
【0039】
ステップS2では第2の赤外線センサ13がプラス出力を発生しているかどうかを判定し、プラス出力を発生していなければステップS1に戻る。発生しているときにはステップS103に進む。ステップS103以降については図4にて説明する。
【0040】
ステップS3ではタイマー15により待ち時間のカウントをスタートしてステップS4に進む。ステップS4では、次に第2の赤外線センサ13がプラス出力を発生しているかどうかを判定し、プラス出力が発生していなければステップS5に進む一方、発生していればステップS6に進む。
【0041】
ステップS5ではステップS3でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。そしてt1を過ぎてしまうとステップS1に戻る一方、まだ過ぎていなければステップS4に戻って第2の赤外線センサ13がプラス出力を発生するのを待つ。
【0042】
ここで待ち時間がt1を過ぎたときは、第1の赤外線センサ12だけの前で手をかざして長時間が経過した状態であるので、使用者が手を上下動作させたのではなく、また両方のセンサの前で手をかざして静止したのでもないと判断する。
【0043】
ここで所定時間t1は通常、人が手を振り上げたり振り下ろしたりすると、第1の赤外線センサ12と第2の赤外線センサ13の間を通過するのに要する時間にある程度の時間を加え、例えば0.3秒という程度である。
【0044】
ステップS6では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力をしている連続時間をタイマー15によりカウント開始し、ステップS7に進む。
【0045】
ステップS7では、第1の赤外線センサ12のプラス出力を検出してから第2の赤外線センサ13のプラス出力を検出するまでの時間が短すぎないかを確認するのであるが、ステップS3でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定する。
【0046】
そしてt2を過ぎていればステップS8に進む一方、まだt2に達していなければステップS10に進む。ここでt2は手を上から下に振り下ろすときに第1の赤外線センサ12から第2の赤外線センサ13まで移動に要する時間より短い十分短い時間で、例えば0.05秒程度である。
【0047】
ステップS8では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力を発生しているかを判定し、両方がプラス出力であればステップS9に進む一方、どちらかがプラス出力でなければステップS13に進む。
【0048】
ステップS9ではステップS6でカウントを開始した両方のセンサがプラス出力を発生してからの連続時間が予め定めた時間t3を過ぎたかどうかを判定する。過ぎていれば両方のセンサの前で手をかざして静止されていると判断しステップS12に進んで送受信器10より静止信号を送信しステップS15に進む。またt3を過ぎていなければステップS8に戻って処理を繰り返す。
【0049】
ステップS10は第1の赤外線センサ12がプラス出力を発生してから第2の赤外線センサ13がプラス出力を発生するまでの時間が短すぎる場合の処理であり、手が上から下に移動するのでなく、右からか左から両方のセンサにほぼ同時に近付いてきた場合の処理
である。
【0050】
ここでも第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力を発生しているかを判定し、両方がプラス出力であればS11に進む一方、どちらかがプラス出力でなければ、これは手が左右に移動するなど所定の動作以外の動作であると考えられるので、ステップS1に戻る。
【0051】
ステップS11ではステップS9と同様、両方のセンサがプラス出力を発生してからの連続時間が予め定めた時間t3を過ぎたかどうかを判定し、過ぎていれば両方のセンサの前で手をかざして静止されていると判断しステップS12に進んで送受信器10より静止信号を送信しステップS15に進む。またt3を過ぎていなければステップS10に戻って処理を繰り返す。
【0052】
ここで使用者が手を両方のセンサの前で手をかざして静止する状態を判定するための、プラス出力を発生し続ける連続時間のt3については、不意に両方のセンサの前に手が近付いてしまうことと区別するために、ある程度の長さを持たせた例えば2秒ぐらいである。
【0053】
ステップS13においては第2の赤外線センサ13がプラス出力で第1の赤外線センサ12はプラス出力を発生していない状態かどうかを判定する。
【0054】
その状態であれば第1の赤外線センサ12がプラス出力になった後、t2時間以上経過した後、第2の赤外線センサ13がプラス出力になり、そして第2の赤外線センサ13がプラス出力の間に第1の赤外線センサ12がプラス出力ではなくなったので、図2(c)に示す状態であるのでステップS14に進み送受信器10より手を振り下ろした信号を送信し、そしてステップS15に進む。
【0055】
一方、ステップS13において第2の赤外線センサ13がプラス出力で第1の赤外線センサ12はプラス出力を発生していない状態でなければ、図2(a)、(b)、(c)に示すいずれのパターンでもないので使用者が所定の動作をしたものではないと判定し、ステップS1に戻る。
【0056】
ステップS15以降は、次に使用者が所定の動作を行うことを受け付けることができる状態になるのを待つための信号処理の流れであり、まずステップS15で第1の赤外線センサ12、第2の赤外線センサ13の両方の出力がプラスではなくゼロ出力になっているかどうかを判定する。
【0057】
そして両方がゼロ出力になっていればステップS16に進む一方、どちらかがプラス出力であればステップS15に戻り、両方がゼロ出力になることを待つ。
【0058】
そしてステップS16ではタイマー15により、再度待ち時間のカウントを開始しステップS17に進む。ステップS17ではステップS16でカウントを開始した待ち時間が予め定めた所定時間t4を経過したかどうかを判定する。経過していなければステップS17に戻って経過するのを待つ。経過すればステップS1に戻って、再び第1の赤外線センサ12の出力を確認することを繰り返す。
【0059】
ここで所定時間t4だけ待つのは、手の上下動作を確定した直後に、そこから戻すための上下動作があっても、それを検出しないようにするためであり、例えば1秒程度である。
次に図4のフローチャートを用いて、使用者が手を振り上げる動作を検出する信号処理の
流れについて説明する。
【0060】
前記した図3の説明の中で、ステップS1で第1の赤外線センサ12がプラス出力でなく、ステップS2で第2の赤外線センサがプラス出力であった場合に、図4のステップS103から処理を行う。
【0061】
ステップS103ではタイマー15により待ち時間のカウントをスタートしてステップS104に進む。ステップS104では、次に第1の赤外線センサ12がプラス出力を発生しているかどうかを判定し、プラス出力が発生していなければステップS105に進む一方、発生していれステップS106に進む。
【0062】
ステップS105ではステップS103でカウントを開始した待ち時間が予め定めた所定時間t1を過ぎたかどうかを判定する。
【0063】
そしてt1を過ぎてしまうとステップS1に戻る一方、まだ過ぎていなければステップS104に戻って第1の赤外線センサ12がプラス出力を発生するのを待つ。ここで待ち時間がt1を過ぎたときは、第2の赤外線センサ13だけの前で手をかざして長時間が経過した状態であるので、使用者が手を上下動作させたのではなく、また両方のセンサの前で手をかざして静止したのでもないと判断する。
【0064】
ステップS106では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力をしている連続時間をタイマー15によりカウント開始し、ステップS107に進む。
【0065】
ステップS107では、第2の赤外線センサ13のプラス出力を検出してから第1の赤外線センサ12のプラス出力を検出するまでの時間が短すぎないかを確認するのであるが、ステップS103でカウントを開始した待ち時間が予め定めた所定時間t2を過ぎているかどうかを判定する。そしてt2を過ぎていればステップS108に進む一方、まだt2に達していなければステップS10に進む。
【0066】
ステップS108では第1の赤外線センサ12と第2の赤外線センサ13の両方がプラス出力を発生しているかを判定し、両方がプラス出力であればステップS109に進む一方、どちらかがプラス出力でなければステップS113に進む。
【0067】
ステップS109ではステップS106でカウントを開始した両方のセンサがプラス出力を発生してからの連続時間が予め定めた時間t3を過ぎたかどうかを判定する。過ぎていれば両方のセンサの前で手をかざして静止されていると判断しステップS12に進んで送受信器10より静止信号を送信しステップS15に進む。またt3を過ぎていなければステップS108に戻って処理を繰り返す。
【0068】
ステップS10からステップS12については、前記した図3の説明と同様であり、説明を省略する。
【0069】
ステップS113においては第1の赤外線センサ12がプラス出力で第2の赤外線センサ13はプラス出力を発生していない状態かどうかを判定する。
【0070】
その状態であれば第2の赤外線センサ13がプラス出力になった後、t2時間以上経過した後、第1の赤外線センサ12がプラス出力になり、そして第1の赤外線センサ12がプラス出力の間に第2の赤外線センサ13がプラス出力ではなくなったので、図2(b)に示す状態であるのでステップS114に進み送受信器10より手を振り上げた信号を送
信し、そしてステップS15に進む。
【0071】
一方、ステップS113において第1の赤外線センサ12がプラス出力で第2の赤外線センサ13はプラス出力を発生していない状態でなければ、図2(a)、(b)、(c)に示すいずれのパターンでもないので使用者が所定の動作をしたものではないと判定し、ステップS1に戻る。
【0072】
ステップS15からステップS17については、前記した図3の説明と同様であり、説明を省略する。
【0073】
次に図5のフローチャートを用いて、本体1の制御手段7の動作の流れについて説明する。
【0074】
本体1の制御手段7はまずステップS1で着座検出手段8により使用者が着座しているかどうかを判定し、着座を検出すればステップS2に進む一方、検出しなければステップS1に戻って着座検出するのを待つ。ステップS2では送受信器9により着座信号を送信してリモコン2においての所定の動作検出を開始させ、ステップS3に進む。
【0075】
ステップS3ではリモコン2から使用者が手をかざして静止したときに送られる静止信号を受信したかどうかを判断し、静止信号を受信すればステップS4に進んで洗浄手段5を駆動して洗浄を開始しステップS5に進む。一方、静止信号を受信しなければステップS3に戻って静止信号を受信するまで待つ。
【0076】
ステップS5ではリモコン2から使用者が手を振り上げた信号を受信したかどうかを判断し、受信すればステップS6に進む一方、受信しなければステップS7に進む。ステップS6では使用者が手を振り上げた動作に対応して洗浄手段5を制御して洗浄流量を増加させ、ステップS9に進む。
【0077】
またステップS7ではリモコン2から使用者が手を振り下ろした信号を受信したかどうかを判断し、受信すればステップS8に進む一方、受信しなければステップS9に進む。ステップS8では使用者が手を振り下ろした動作に対応して洗浄手段5を制御して洗浄流量を減少させ、ステップS9に進む。
【0078】
ステップS9ではリモコン2から静止信号を受信したかどうかを判断し、静止信号を受信すれば洗浄終了としてステップS10に進んで洗浄手段5を停止し、引き続き乾燥手段6を駆動して乾燥を開始し、ステップS11に進む。一方、ステップS9において静止信号を受信しなければステップS5に戻り、使用者の手の上下動作の信号受信判断とそれに対応する洗浄量の増減制御を繰り返す。
【0079】
ステップS11ではリモコン2から使用者が手を振り上げた信号を受信したかどうかを判断し、受信すればステップS12に進む一方、受信しなければステップS13に進む。
【0080】
ステップS12では使用者が手を振り上げた動作に対応して乾燥手段6を制御して温風の温度を上昇させ、ステップS15に進む。またステップS13ではリモコン2から使用者が手を振り下ろした信号を受信したかどうかを判断し、受信すればステップS14に進む一方、受信しなければステップS15に進む。
【0081】
ステップS14では使用者が手を振り下ろした動作に対応して乾燥手段6を制御して温風温度を下降させ、ステップS15に進む。
【0082】
ステップS15ではリモコン2から静止信号を受信したかどうかを判断し、静止信号を受信すれば乾燥終了としてステップS16に進んで乾燥手段6を停止し、ステップS17に進む。一方、ステップS15において静止信号を受信しなければステップS11に戻り、使用者の手の上下動作の信号受信判断とそれに対応する温風温度の上昇下降制御を繰り返す。
【0083】
洗浄量と温風温度は、例えば5段階の複数段階を予め設定していて、静止信号を受信してステップS4で洗浄を開始したり、ステップS10で乾燥を開始したりするときには、中央の段階の例えば3段階目の出力で開始し、以後、振り上げ信号を受信すれば1段階上昇させ、振り下ろし信号を受信すれば1段階下降させるなどして、洗浄量や温風温度を制御するものである。
【0084】
ステップS17では使用者が着座検出手段8により、使用者が便座を離れたかどうか、離座検出を行う。離座を検出するとステップS18に進み、離座信号を送信して処理を終了する。一方、ステップS17で離座を検出しなかった場合には、ステップS17に戻り、離座を検出するまで検出を繰り返す。
【0085】
以上、図3〜5で説明したリモコン2の信号処理回路14の動作と、本体1の制御手段7の動作で、使用者が便座3に着座すると使用者の所定の動作の検出が始まり、第1の赤外線センサ12と第2の赤外線センサ13の前に使用者が手をかざして静止すると洗浄が始まり、使用者が2つのセンサの前で手を上下動作することで洗浄量の増減を制御する。
【0086】
再び使用者が2つのセンサの前で手を静止すると洗浄が終了して乾燥が始まり、更に使用者が2つのセンサの前で手を上下動作することで温風温度の上昇下降を制御し、更に使用者が2つのセンサの前で手を静止することで乾燥が終了する。そして使用者が離座すると、所定の動作の検出が終了する。
【0087】
以上のように本発明の実施の形態1によれば、複数の近接検出器をサーモパイルの赤外線センサとしたことで、使用者の手が赤外線センサの視野に入ることで生じるセンサ自身の温度と視野対象物の温度の温度差により出力が発生する、その順により手を上から下に振り下ろしたのか、下から上に振り上げたのかを判定することができ、その上下動作に連動するように洗浄を制御することが可能となる。
【0088】
なお、本実施の形態1では近接検出器としてサーモパイルの赤外線センサを用いたが、焦電型赤外線センサを用いても同様の効果を得られるものである。焦電型赤外線センサは視野対象物の温度変化により出力を発生するので、その出力は図2に示した出力の時間変化を微分したような形となる。
【0089】
したがって信号処理回路14において、ソフト的またはハード的に積分演算を行えば図2に示した出力の時間変化と同様の出力が得られるので、同じように処理をして同様の効果が得られる。他にも、2枚の電極を備えた構成にして、信号処理回路において電極における静電容量を測定することで、手が近付いたことを検出するという方法もある。
【0090】
(実施の形態2)
次に本発明の第2の実施の形態について説明する。第2の実施の形態において、第1の実施の形態と異なるところは動作検出手段11であり、図6は動作検出手段11を含むリモコン2の構成を説明する図である。図6において図1と同じ機能を有するものには同じ番号を付し、説明を省略する。
【0091】
図6において第3の赤外線センサ16、第4の赤外線センサ17、第5の赤外線センサ
18はいずれもサーモパイルの赤外線センサであり、それらは近接検出器として機能する。
【0092】
そしてこの3個の赤外線センサはほぼ正三角形の頂点のように配置していて、直線上に並んでいるようなものではない。この構成で、使用者が手を回転させる動作で時計回りの回転か反時計回りの回転かを検出する。
【0093】
図7を用いて第3の赤外線センサ16と第4の赤外線センサ17と第5の赤外線センサ18の出力特性について説明する。図7においてV16は第3の赤外線センサ16の出力の時間変化であり、V17は第4の赤外線センサ17の出力の時間変化であり、V18は第5の赤外線センサ18の出力の時間変化である。
【0094】
そして図7(a)は3つの赤外線センサの前で使用者が手を時計方向に連続で回転させた場合、図7(b)は3つの赤外線センサの前で使用者が手を反時計方向に連続で回転させた場合である。
【0095】
図7(a)では、第5の赤外線センサ18、第4の赤外線センサ17、第3の赤外線センサ16の順に使用者の手がセンサの視野に入る。したがって、V18、V17、V16の順にプラス出力を発生し、また出力がゼロに戻るのもV18、V17、V16の順である。
【0096】
また図7(b)では、第5の赤外線センサ18、第3の赤外線センサ16、第4の赤外線センサ17の順に使用者の手がセンサの視野に入る。したがって、V18、V16、V17の順にプラス出力を発生し、また出力がゼロに戻るのもV18、V16、V17の順である。
【0097】
そして信号処理回路14では、例えばV18がプラス出力に立ち上がったところを起点として、次にV18がプラス出力に立ち上がるまでにV17、V16の順にプラス出力に立ち上がっていれば時計回りに1回転として送受信器9から本体1の送受信器10に信号を送信する。
【0098】
また、V18がプラス出力に立ち上がったところを起点として、次にV18がプラス出力に立ち上がるまでにV16、V17の順にプラス出力に立ち上がっていれば反時計回りに1回転として送受信器9から本体1の送受信器10に信号を送信する。
【0099】
そして本体1の制御手段7は、時計回りの回転動作の信号を受信すると洗浄量を1ステップ増加、または乾燥温度を1ステップ上昇させるように制御し、逆に反時計回りの回転動作の信号を受信すると洗浄量を1ステップ減少、または乾燥温度を1ステップ下降させるように制御する。
【0100】
以上のように本発明の実施の形態2によれば、3個のサーモパイル赤外線センサにより、その出力がプラスに転じる順により時計回りの回転動作なのか、反時計回りの回転動作なのかを判定することができ、その回転動作に連動するように洗浄を制御することが可能となる。
【0101】
そして実施の形態1の上下動作とは違って、時計回りであれば時計回りの連続動作、反時計回りであれば反時計回りの連続動作として、2回転、3回転、・・・と動作を連続し易く、使用者にとって洗浄の調整などの使い勝手が良い。
【0102】
また、3個のサーモパイル赤外線センサの前で使用者が手を静止させると、3個とも全
てプラスの出力を発生させるので、それが所定時間以上続いたことで、使用者が手をかざして静止させたことを検出することもでき、実施の形態1と同様に、手をかざして静止することで、洗浄の開始、洗浄の停止と乾燥の開始、乾燥の終了を切り替えることも可能である。
【0103】
また、本実施の形態2では、実施の形態1と同様に近接検出器としてサーモパイルの赤外線センサを用いたが、焦電型赤外線センサを用いても同様の効果を得られるものである。他にも、3枚の電極を備えた構成にして、信号処理回路において電極における静電容量を測定することで、手が近付いたことを検出するという方法もある。また近接検出器を4個以上使うことで、より精度よく回転動作を検出しても良い。
【0104】
(実施の形態3)
次に本発明の第3の実施の形態について説明する。第3の実施の形態において、第1、第2の実施の形態と異なるところは動作検出手段11の部分であり、図8は動作検出手段11を含むリモコン2の構成を説明する図である。図8において図1、図6と同じ機能を有するものには同じ番号を付し、説明を省略する。
【0105】
図8において、19は発光素子で赤外発光ダイオードであり、それに対してフォトダイオードより成る受光素子が2つある。第1の受光素子20は、発光素子19より上方に配置し、第2の受光素子21は発光素子19より下方に配置している。第1の受光素子20と第2の受光素子21は、それぞれ発光素子19との間に一定の間隔を開けて配置したものであり、その間隔は例えば5cmぐらいである。これら発光素子19、第1の受光素子20、第2の受光素子21により近接検出器が構成される。
【0106】
そして発光素子19が点灯して出力された赤外光がその前の物体で反射すると、第1の受光素子20や第2の受光素子21が受光して出力を発生する。第1の受光素子20、第2の受光素子21の出力は、前方の物体までの距離が10cmぐらいまでの距離に人体の一部、例えば使用者の手が近接すればそれを検出することができる。
【0107】
信号処理回路14にはタイマー15の他、送受信器10が受信した信号に基づき発光素子19の発光を制御する発光制御部22と、2つの受光素子20、21からの入力により、上から下への振り下ろし動作か、下から上への振り上げ動作か、あるいは静止かを判定する所定動作判定部23を有する。
【0108】
本体1の送受信器9から使用者の着座を検出した信号が送信されると、リモコン2の送受信器10がその信号を受信し、それに基づき発光素子19を所定パターンで点滅を開始し、使用者の離座を検出した信号を受信すると、それに基づき発光素子19の点滅を終了して消灯する。
【0109】
所定動作判定部23は、発光素子19による点滅開始から終了までの間、即ち使用者が着座してから離座するまでの間、使用者が所定の動作を行ったかどうかを判定する。
【0110】
図9は発光素子19、および第1の受光素子20、第2の受光素子21の前で、使用者が手を上下動作させた場合の、それぞれの素子の出力の時間的変化を示すタイミングチャートである。図9(a)は手を下から上に振り上げた場合であり、図9(b)は手を上から下に振り下ろした場合であり、またI19は発光素子19の出力、V20は第1の受光素子20の出力、V21は第2の受光素子21の出力の時間変化である。
【0111】
図9において、まず発光制御部22が送受信器10から着座信号を受信すると発光素子19を所定のパターンで点滅させる。図9(a)に示すように、使用者の手が下に取り付
けられた第2の受光素子21に近付くと、発光素子19で発光した光は手で反射して第2の受光素子21が受光する。
【0112】
第2の受光素子21は発光素子19の点滅パターンと一致する出力を発生する。その後、上に取り付けている第1の受光素子20に使用者の手が近付くと、発光素子19で発光した光は手で反射して第1の受光素子20が受光する。
【0113】
第1の受光素子20は発光素子19の点滅パターンと一致する出力を発生する。このように第2の受光素子21、第1の受光素子20の順で出力の発生があれば、所定動作判定部23は手が下から上に振り上げられたと判定する。
【0114】
また、図9(b)に示すように、使用者の手が上に取り付けられた第1の受光素子20に近付くと、発光素子19で発光した光は手で反射して第1の受光素子20が受光する。第1の受光素子20は発光素子19の点滅パターンと一致する出力を発生する。
【0115】
その後、下に取り付けている第2の受光素子21に使用者の手が近付くと、発光素子19で発光した光は手で反射して第2の受光素子21が受光する。第2の受光素子21は発光素子19の点滅パターンと一致する出力を発生する。このように第1の受光素子20、第2の受光素子21の順で出力の発生があれば、所定動作判定部23は手が上から下に振り下ろされたと判定する。
【0116】
ぞして図9において、発光制御部22が送受信器10から離座信号を受信すると発光素子19の点滅を停止し、消灯する。
【0117】
以上のように本発明の実施の形態3によれば、発光素子と2個の受光素子により、発光素子の点滅パターンと同じパターンの出力があれば受光したものとして、その受光の順番より手が下から上に振り上げられたのか、上から下に振り下ろされたのかを判定することができる。
【0118】
またこの2個の受光素子の前で使用者が手を静止させると、2個とも発光素子19の点滅パターンと同じ出力を発生するので、それが所定時間以上続いたことで、使用者が手をかざして静止させることも検出でき、実施の形態1と同様に、洗浄量の増減や乾燥温風温度の上昇下降、更には洗浄の開始、洗浄の停止と乾燥の開始、乾燥の終了を切り替えることも可能である。
【0119】
そして、発光素子19は所定のパターンで点滅していて、2個の受光素子が同じパターンの出力を発生しているかで、手が近付いたことを判定しているので、発光素子19以外の光、例えば窓などから入ってくる太陽の光や、照明器具の光などと区別することができ、動作判定の信頼性を高めることができる。
【0120】
また、以上説明してきた実施の形態1から4において、動作検出手段は着座検出手段で使用者が着座していることを検出しているときにだけ所定の動作を検出するものとしているので、動作検出のための消費電流を低減することができ、電池電源のリモコンであっても、発光素子を発光させて動作を検出するようなことも可能となる。
【産業上の利用可能性】
【0121】
以上のように本発明は、動作検出手段により人体の一部の所定の動作を検出し、制御手段によって検出した所定の動作に対応して洗浄手段を制御するので、使用者が意図を持って行う所定の動作を非接触で検出し、使用者の意図どおりに制御することが可能となるので、トイレ装置の各種機能として適用できる他、手が汚れたり濡れたりしているときに、
操作したいような機器にも利用可能である。
【符号の説明】
【0122】
1 本体
2 リモコン
3 便座
4 洗浄ノズル
5 洗浄手段
6 乾燥手段
7 制御手段
8 着座検出手段
9、10 送受信器
11 動作検出手段
12、13、16、17、18 赤外線センサ
14 信号処理回路
15 タイマー
19 発光素子
20、21 受光素子
【特許請求の範囲】
【請求項1】
便座と、前記便座に使用者が着座していることを検出する着座検出手段と、使用者の局部を洗浄する洗浄手段と、使用者の人体の一部の所定の動作を非接触で検出する動作検出手段と、前記動作検出手段により検出した動作に対応して前記洗浄手段を制御する制御手段を有し、前記制御手段は前記着座検出手段により使用者の着座を検出しているときにのみ前記動作検出手段の検出を受け付けるトイレ装置。
【請求項2】
動作検出手段は、人体の一部が近接したことを検出する近接検出器を複数有する請求項1に記載のトイレ装置。
【請求項3】
動作検出手段は、近接検出器を少なくとも3個有し、前記少なくとも3個の近接検出器が直線状に並んでいない構成で人体の一部の回転動作を検出する請求項2記載のトイレ装置。
【請求項4】
複数の近接検出器は、赤外線を検出する複数の赤外線検出器を有する請求項2記載のトイレ装置。
【請求項5】
複数の近接検出器は、発光素子と、複数配置し前記発光素子から発せられた光を受光する受光素子を有し、着座検出手段が使用者の着座を検出しているときにのみ前記発光素子を駆動する請求項2記載のトイレ装置。
【請求項1】
便座と、前記便座に使用者が着座していることを検出する着座検出手段と、使用者の局部を洗浄する洗浄手段と、使用者の人体の一部の所定の動作を非接触で検出する動作検出手段と、前記動作検出手段により検出した動作に対応して前記洗浄手段を制御する制御手段を有し、前記制御手段は前記着座検出手段により使用者の着座を検出しているときにのみ前記動作検出手段の検出を受け付けるトイレ装置。
【請求項2】
動作検出手段は、人体の一部が近接したことを検出する近接検出器を複数有する請求項1に記載のトイレ装置。
【請求項3】
動作検出手段は、近接検出器を少なくとも3個有し、前記少なくとも3個の近接検出器が直線状に並んでいない構成で人体の一部の回転動作を検出する請求項2記載のトイレ装置。
【請求項4】
複数の近接検出器は、赤外線を検出する複数の赤外線検出器を有する請求項2記載のトイレ装置。
【請求項5】
複数の近接検出器は、発光素子と、複数配置し前記発光素子から発せられた光を受光する受光素子を有し、着座検出手段が使用者の着座を検出しているときにのみ前記発光素子を駆動する請求項2記載のトイレ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−96070(P2013−96070A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−236881(P2011−236881)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]