
トラクタの作業機昇降装置
【課題】操縦席から上げ側ストッパを移動調節するだけの簡単な設定動作により、リフトアームの上方回動高さの規制を能率よく正確に行うことができるトラクタの作業機昇降装置を提供する。
【解決手段】ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置であって、ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けた。
【解決手段】ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置であって、ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、耕耘装置等の作業機の上げ高さを調節することができるトラクタの作業機昇降装置に関する。
【背景技術】
【0002】
従来、耕耘装置等の作業機をリフトアームとリンク機構(昇降リンク機構)を介して昇降するに、ポジションコントロールレバーによってポジションコントロールアームを回動して油圧バルブのスプール位置を調節し、油圧シリンダを伸縮させてリフトアームを昇降自在とする一方、変速レバーに連動するバックスイッチ並びに作業機昇降スイッチにより電動モータを作動させ、油圧バルブのスプール位置を調節して油圧シリンダを伸縮させ、リフトアームを昇降させるようにしたトラクタが既に公知である(例えば特許文献1)。
上記トラクタの作業機昇降装置は、ポジションコントロールレバーの支軸の近傍に配置される電動モータを支軸を中心に回動させることにより、リフトアームの上方回動位置を規制し作業機の上げ高さを調節するように構成しており、これにより例えば、農用ハウスや果樹園内において、作業機の上がり過ぎによって柱等の構造物に接触すること、及び代掻作業時においてハローの上がり過ぎによって生じる泥土飛散と言った不具合を防止するようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実用新案登録第2598800号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に示されるトラクタの作業機昇降装置は、作業機の上げ高さを調節する際に、バックアップモータ取付座を支軸を中心に回動して調節するものであるため、バックアップモータ取付座の回動量とリフトアームの上方回動位置(上限位置)の対応関係を正確に把握することができず、何回かやり直しながら作業機の上げ高さの調節をしなければならない等の欠点がある。
またバックアップモータ(電動モータ)は、ポジションコントロールレバーの操作をガイドするレバーガイドから下方に離れた、ポジションコントロールレバーの回動支持部の近傍位置にあるため、操縦席から腰をかがめた無理な姿勢で調節作業を行わねばならない等調節作業が煩雑になること、及び調節構造が複雑化する等の問題がある。
【課題を解決するための手段】
【0005】
本発明は係る課題を解決するために、第1に、ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けることを特徴としている。
第2に、ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールレバー15に接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設ける一方、当該上げ側ストッパ33にポジションコントロールアーム17によって入り切りされる電動モータ19のストップスイッチ38を設けることを特徴としている。
【発明の効果】
【0006】
請求項1の発明によれば、レバーガイドにポジションコントロールアーム、又はポジションコントロールアームとポジションコントロールレバーにそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパを設けることにより、操縦席に座ったまま身を屈めたり無理な姿勢をとることなく、上げ側ストッパを移動調節するだけの簡単な操作によって、ポジションコントロールレバー、又は電動モータを作動させた際の、作業機の最上げ位置の設定を能率よく正確に行うことができる。
またポジションコントロールアームの回動規制を、ポジションコントロールアームを上げ側ストッパに接当させて規制するメカニカルな手段によって行うので、作業機昇降装置を簡単且つ廉価に構成にすることができる。
【0007】
請求項2の発明によれば、ポジションコントロールレバーを案内するレバーガイドに、ポジションコントロールレバーに接当して、作業機の最上げ位置を設定する上げ側ストッパを設ける一方、当該上げ側ストッパにポジションコントロールアームによって入り切りされる電動モータのストップスイッチを設けることにより、作業機昇降スイッチの上げ又は変速レバーのバック操作により、上げ側に回動するポジションコントロールアームがスイッチ片に接触した上限位置になるとき、ストップスイッチが電動モータの回転を停止し作業機を設定された上げ位置で停止することができる。
【図面の簡単な説明】
【0008】
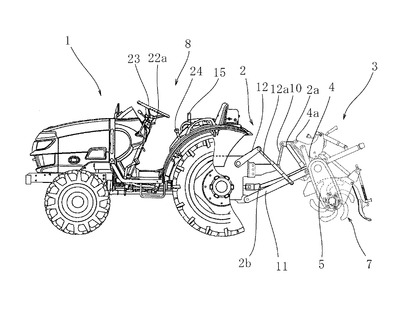
【図1】トラクタに耕耘装置を装着した状態を示す側面図である。
【図2】作業機昇降装置を示す側面図である。
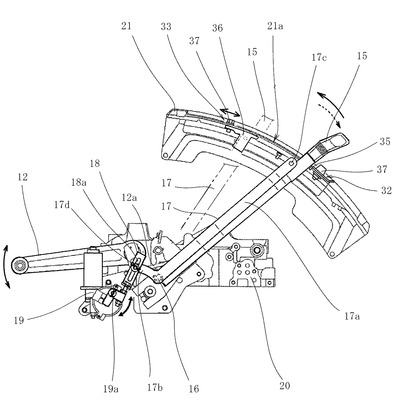
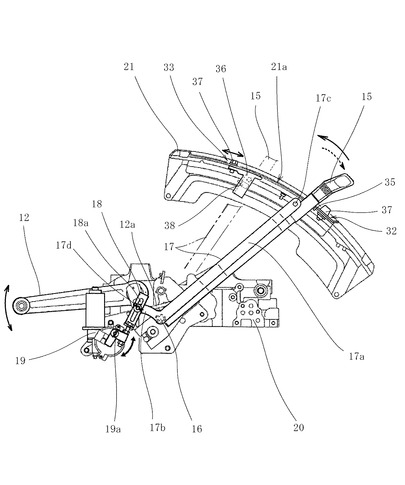
【図3】作業機昇降装置の別実施形態を示す側面図である。
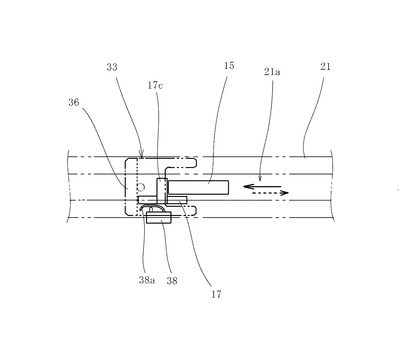
【図4】レバーガイドに設置される上げ側ストッパの作用を示す平面図である。
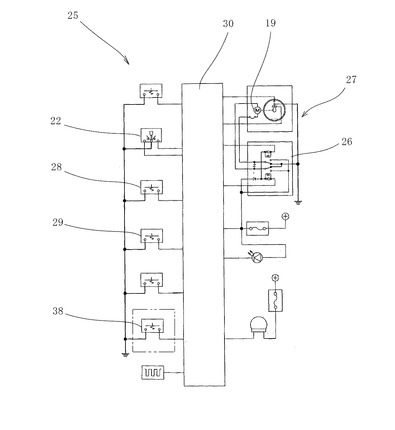
【図5】作業機昇降装置の制御回路図である。
【発明を実施するための形態】
【0009】
本発明の一実施形態を図面に基づいて説明する。図1に示すトラクタ1は、走行機体後部に設置されるリフト機構(昇降リンク機構)2に、作業機連結装置(オートヒッチ)2aを介してロータリ式の耕耘装置(作業機)3を着脱自在に連結している。この耕耘装置3は、車体後部から伝動シャフト2bを介して動力を受け入れるギヤケース4と、該ギヤケース4の両側で左右方向に延設されるビームと、ビーム両端に下向きに固設されるチェンケース5及びサポート(図示せず)と、チェンケース5とサポートに軸支されるロータリ耕耘部7と、上記ギヤケース4の上部に固設されるトップマスト4a等から構成される。
【0010】
これによりトラクタ1は、伝動シャフト2b、ギヤケース4及びチェンケース5を介して耕耘装置3のロータリ耕耘部7を回転駆動し耕耘作業を行う。またリフト機構2は、トップリンク10とロワーリンク11の後部に作業機連結装置2aを連結しており、ポジションコントロールレバー15等の操作によって作動される油圧シリンダ(図示せず)の伸縮によりリフトアーム12を上下回動し、リフトロッド12a及び作業機連結装置2aを介し耕耘装置3を昇降させる。上記ポジションコントロールレバー15は操縦部8の右側フェンダ部に配設されている。
【0011】
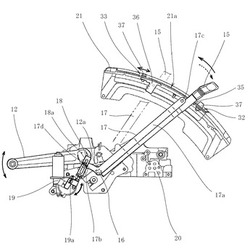
そして、リフトアーム12を上下回動させる作業機昇降装置は、図2,図5に示すように構成している。即ち、作業機昇降装置は、ポジションコントロールレバー15のボス部を支軸16に回動自在に嵌装し、且つ該支軸16にポジションコントロールアーム17のボス部を同様に嵌装している。ポジションコントロールアーム17は、ボス部の上下側に上側アーム部17aと下側アーム部17bとを側面視で逆L字状をなすように一体形成している。上側アーム部17aは、その長さを下側アーム部17bより長くしており、その上端部にポジションコントロールレバー15の後辺に接当自在なピン17cを突設している。
【0012】
またポジションコントロールアーム17は、図示しない油圧バルブのスプールを下降側に付勢するスプリングによって、図2において時計方向に付勢されポジションコントロールレバー15に片当たり状に当接する。そして、下側アーム部17bは端部に突設したピン17dを、ロッド18の長孔18aにスライド自在に挿入している。ロッド18の基部は、電動モータ19で駆動されるアーム19aの上端部に取付けられている。上記ポジションコントロールレバー15及びポジションコントロールアーム17を軸支する支軸16と電動モータ19は、いずれも車体の後部上方に設置される油圧ケース20の右壁部に設けられている。
【0013】
ポジションコントロールレバー15は、右側フェンダに設置されるレバーガイド21のガイド溝21aに挿入されて前後方向に回動操作することができると共に、後述するレバー操作範囲調節構造によりレバーの回動範囲を調節することができる。また操縦部側から電動モータ19を正逆回転自在に切換操作する作業機昇降レバー22aのスイッチ(作業機昇降スイッチ)22は、ステアリングハンドル23の基部側に設置している。そして、機体を前後進変速操作する変速レバー24は左側フェンダに設置している。
【0014】
上記作業機昇降装置の制御回路25は図5で示すように、電動モータ19及びモータリレー部26を有するモータ回路部27と、前記作業機昇降スイッチ22及びバックアップ機能を入り切りさせるバックアップ切替スイッチ28、並びに変速レバー24を後進位置に操作したとき電動モータ19を正転させてリフトアーム12を上げ作動するバックスイッチ29等を、マイクロコンピュータ30に接続している。
【0015】
上記構成により作業機昇降装置は図2で示すように、ポジションコントロールレバー15を下げ位置から実線矢印方向に向けて後方側(上げ側)に回動操作すると、ピン17cを介して上側アーム部17aを押動し、ポジションコントロールアーム17を反時計方向に回動し油圧バルブのスプールを作動させる。これによりリフトアーム12は、油圧シリンダーを介して上げ方向に回動される。そして、リフトアーム12の回動は、フィードバックリンク12aを介して油圧バルブのスプールを作動させて油圧シリンダを停止させるので、作業機はポジションコントロールレバー15の操作位置に対応する位置まで上昇する。
【0016】
またポジションコントロールレバー15を上げ位置から下げ側操作、即ち図2の点線矢印方向に向け前方側(下げ側)に回動操作すると、ポジションコントロールアーム17は上側アーム部17aのピン17cがポジションコントロールレバー15に接当しながら、時計方向に回動し油圧バルブのスプールを作動させる。これによりリフトアーム12は、油圧シリンダーを介して下げ方向に回動される。また以上のようにポジションコントロールレバー15が操作されるとき、下側アーム部17bのピン17dは長孔18a内を移動する。
【0017】
一方、リフトアーム12が下げ位置にあるとき、変速レバー24をバック位置に操作すると、この操作に連動してバックスイッチ29が入りになり、マイクロコンピュータ30で構成する制御部は電動モータ19を正転作動させる。これによりアーム19aが時計方向に回動しロッド18を引き下げ、ピン17dが長孔18aの上端に接当した後は、ポジションコントロールアーム17を反時計方向に回動する。このときポジションコントロールアーム17は、上側アーム部17aがポジションコントロールレバー15から離れながら上げ側に向かって回動する。
【0018】
従って、耕耘装置3を下降させて行う耕耘作業時に、作業機昇降レバー22aを上げ側に操作し作業機昇降スイッチ22を入りにすると、制御部は電動モータ19を正転作動し上記と同様の作動によりリフトアーム12は上げ回動するので、耕耘装置3をスイッチ操作によって速やかに上昇させることができる。また耕耘作業時に耕耘装置3の上昇操作を失念したまま変速レバー24をバックに入れ後進したとしても、リフトアーム12は上げ回動し耕耘装置3を上昇させるので、安全に後進することができる。また上記いずれの場合も耕耘装置3の最上げ位置の設定は、後述する上げ側ストッパ33の調節位置に対応させて、ポジションコントロールアーム17の上げ側回動を規制し、電動モータ19を回動停止させることにより行われる。また変速レバー24を後進側から前進側に変速した場合、又は作業機昇降スイッチ22を下げ側に操作すると、電動モータ19が逆転作動しロッド18を上げ方向に駆動するため、リフトアーム12は下げ回動し耕耘装置3を下降させる。
【0019】
次に、上記構成からなる作業機昇降装置に設置するレバー操作範囲調節構造について図2,図4を参照し説明する。このレバー操作範囲調節構造は、レバーガイド21に穿設されるガイド溝21aの前部(下げ側)と後部(上げ側)に、溝方向に移動調節自在な下げ側ストッパ32と上げ側ストッパ33とを有している。下げ側ストッパ32と上げ側ストッパ33とはいずれもレバーガイド21に対し、ストッパ部35,36をガイド溝21a内に臨ませた状態で、ボルト37によってレバーガイド21のガイド溝側辺を緊緩自在に挟持した状態で取付けられている。
【0020】
これにより下げ側ストッパ32は、ポジションコントロールレバー15の下げ側位置を規制して、リフトアーム12の下降回動の下限位置を設定することができる。また上げ側ストッパ33は、同様にポジションコントロールレバー15の上げ側位置を規制すると共に、ポジションコントロールアーム17の上げ側回動の上限位置を設定し、リフトアーム12の上方回動高さを次のように設定することができる。
即ち、図2に示すように上げ側ストッパ33は、ストッパ部36をガイド溝21a側から下向きに長く突出させている。これにより上げ側ストッパ33は、上げ側に回動されるポジションコントロールアーム17の上側アーム部17aを接当させて、片当たりするポジションコントロールレバー15のそれ以上の回動を規制することができる。
【0021】
図2において上げ側ストッパ33は、ガイド溝21a後端の最上げ側位置からやや前方に移動調節した設定位置にあり、ポジションコントロールレバー15を上げ操作すると、片当たりしているピン17cを介して回動させたポジションコントロールアーム17をストッパ部36に接当させ、それ以上の上げ側操作が規制される。尚、上げ側ストッパ33に対しては、ポジションコントロールレバー15を接当させてもよく、この場合もポジションコントロールアーム17の上げ側回動の上限位置を設定し、リフトアーム12の上方回動高さを設定することができる。
【0022】
また作業機昇降レバー22aを上げ操作し作業機昇降スイッチ22を入りにすると、電動モータ19が回動しポジションコントロールアーム17を上げ側に回動させリフトアーム12を上方回動させながら、ポジションコントロールアーム17が設定位置でストッパ部36に接当する。これによりポジションコントロールアーム17はそれ以上の移動が規制されるため、電動モータ19はロッド18を介しアーム19aの時計方向回動が不能になるため、モータブレーカ回路によって自動的に回転停止し、それ以上の上げ側操作が規制される。
尚、この状態において作業機昇降レバー22aを下げ操作すると、電動モータ19が逆転しポジションコントロールアーム17を下げ側に向けポジションコントロールレバー15に接当するまで回動させ、接当位置において停止しリフトアーム12の下方回動も停止させる。
【0023】
上記レバー操作範囲調節構造を備える作業機昇降装置は、上げ側ストッパ33をレバーガイド21に沿って移動調節することにより、ポジションコントロールアーム17の上げ側の回動量を規制しリフトアーム12の上げ高さを規制するので、ポジションコントロールレバー15による上限設定と電動モータ19の作動による上限設定とを、1対1に対応させることができる。従って、作業者は操縦部8の操縦席に座ったまま、作業機の上げ高さを目視すると同時に上げ側ストッパ33をレバーガイド21に沿って単に前後方向に移動調節するだけで、作業機の最上げ位置の設定を行うことができる。
【0024】
以上のように構成される作業機昇降装置を備えるトラクタ1は、セットされた上げ側ストッパ33と下げ側ストッパ32との間で、ポジションコントロールレバー15を回動操作して、耕耘装置3を上昇位置と下降位置とに昇降し作業を行うことができる。そして、ハウスや果樹園内の作業或いは代掻き作業等を行う場合に、上げ側ストッパ33を予めガイド溝21aの前側に向けて移動調節することにより、耕耘装置3の最上げ位置を設定しておく。これによりトラクタ1は、耕耘装置3等各種作業機の最上げ位置が規制されて、作業機の上がり過ぎによる不具合を生じない各種の作業をスムーズに行うことができ、また作業機の上昇量を少なくして昇降動作を能率よく行うことができる。
【0025】
また作業機の最上げ位置の設定作業を行うとき、作業者は例えば、耕耘装置3上げ操作しながら返り見て耕耘装置3の上昇位置を確認し、その位置で上げ側ストッパ33を移動させることにより、上げ側ストッパ33を適正位置に速やかに設定することができる。従って、従来のものに比較し操縦席から身を屈めたり腕を大きく伸ばす等の無理な姿勢をとることなく、操縦席に座ったままの楽な姿勢で上げ側ストッパ33と耕耘装置3を目視しながら、上げ側ストッパ33を前後に移動調節するだけの簡単な動作によって、作業機の最上げ位置の設定を能率よく正確に行うことができる。
またポジションコントロールアーム17の回動規制は、ポジションコントロールアーム17を上げ側ストッパ33に接当させて規制するメカニカルな手段によって行うので、作業機の上げ高さを作業状況に適した所望位置に確実に停止させることができると共に、作業機昇降装置を簡単且つ廉価に構成にすることができる等の特徴がある。
【0026】
次に、作業機昇降装置の別実施形態について図3,図4を参照し説明する。尚、上記実施形態のものと同様な構成及び作用については説明を省略する。このレバー操作範囲調節構造の上げ側ストッパ33は、ストッパ部36を下方に長く延長した下部側にストップスイッチ38を設けている。上記ストップスイッチ38は、そのスイッチ片38aをポジションコントロールアーム17の上側アーム部17aに対して接触自在となる位置に設けている。これにより上げ側ストッパ33は、上げ側に操作されるポジションコントロールレバー15をストッパ部36に接当させることができ、それ以上の上げ側への回動操作を阻止することができる。そして、この位置でポジションコントロールアーム17が、スイッチ片38aに接当しストップスイッチ38を入りにする。
【0027】
上記ストップスイッチ38は図5に示す前記制御回路25のマイクロコンピュータ30に対し、点線で示すように接続して付加される。これにより作業機昇降スイッチ22の上げ又は変速レバー24のバック操作により、上げ側に回動するポジションコントロールアーム17がスイッチ片38aに接触した上限位置になるとき、ストップスイッチ38が入りになり電動モータ19の時計方向回転を即時停止させ、リフトアーム12の上方回動を停止し耕耘装置3を設定された最上げ位置にすることができる。
従って、この構成による作業機昇降装置を備えたトラクタ1は、耕耘装置3の上限位置以上の上昇を規制するとき、電動モータ19に過電流を流さないように即時停止することができる等の特徴がある。
【符号の説明】
【0028】
1 トラクタ
2 リフト機構(昇降リンク機構)
3 耕耘装置(作業機)
12 リフトアーム
15 ポジションコントロールレバー
17 ポジションコントロールアーム
19 電動モータ
21 レバーガイド
22 作業機昇降スイッチ
33 上げ側ストッパ
【技術分野】
【0001】
本発明は、耕耘装置等の作業機の上げ高さを調節することができるトラクタの作業機昇降装置に関する。
【背景技術】
【0002】
従来、耕耘装置等の作業機をリフトアームとリンク機構(昇降リンク機構)を介して昇降するに、ポジションコントロールレバーによってポジションコントロールアームを回動して油圧バルブのスプール位置を調節し、油圧シリンダを伸縮させてリフトアームを昇降自在とする一方、変速レバーに連動するバックスイッチ並びに作業機昇降スイッチにより電動モータを作動させ、油圧バルブのスプール位置を調節して油圧シリンダを伸縮させ、リフトアームを昇降させるようにしたトラクタが既に公知である(例えば特許文献1)。
上記トラクタの作業機昇降装置は、ポジションコントロールレバーの支軸の近傍に配置される電動モータを支軸を中心に回動させることにより、リフトアームの上方回動位置を規制し作業機の上げ高さを調節するように構成しており、これにより例えば、農用ハウスや果樹園内において、作業機の上がり過ぎによって柱等の構造物に接触すること、及び代掻作業時においてハローの上がり過ぎによって生じる泥土飛散と言った不具合を防止するようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実用新案登録第2598800号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に示されるトラクタの作業機昇降装置は、作業機の上げ高さを調節する際に、バックアップモータ取付座を支軸を中心に回動して調節するものであるため、バックアップモータ取付座の回動量とリフトアームの上方回動位置(上限位置)の対応関係を正確に把握することができず、何回かやり直しながら作業機の上げ高さの調節をしなければならない等の欠点がある。
またバックアップモータ(電動モータ)は、ポジションコントロールレバーの操作をガイドするレバーガイドから下方に離れた、ポジションコントロールレバーの回動支持部の近傍位置にあるため、操縦席から腰をかがめた無理な姿勢で調節作業を行わねばならない等調節作業が煩雑になること、及び調節構造が複雑化する等の問題がある。
【課題を解決するための手段】
【0005】
本発明は係る課題を解決するために、第1に、ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けることを特徴としている。
第2に、ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールレバー15に接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設ける一方、当該上げ側ストッパ33にポジションコントロールアーム17によって入り切りされる電動モータ19のストップスイッチ38を設けることを特徴としている。
【発明の効果】
【0006】
請求項1の発明によれば、レバーガイドにポジションコントロールアーム、又はポジションコントロールアームとポジションコントロールレバーにそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパを設けることにより、操縦席に座ったまま身を屈めたり無理な姿勢をとることなく、上げ側ストッパを移動調節するだけの簡単な操作によって、ポジションコントロールレバー、又は電動モータを作動させた際の、作業機の最上げ位置の設定を能率よく正確に行うことができる。
またポジションコントロールアームの回動規制を、ポジションコントロールアームを上げ側ストッパに接当させて規制するメカニカルな手段によって行うので、作業機昇降装置を簡単且つ廉価に構成にすることができる。
【0007】
請求項2の発明によれば、ポジションコントロールレバーを案内するレバーガイドに、ポジションコントロールレバーに接当して、作業機の最上げ位置を設定する上げ側ストッパを設ける一方、当該上げ側ストッパにポジションコントロールアームによって入り切りされる電動モータのストップスイッチを設けることにより、作業機昇降スイッチの上げ又は変速レバーのバック操作により、上げ側に回動するポジションコントロールアームがスイッチ片に接触した上限位置になるとき、ストップスイッチが電動モータの回転を停止し作業機を設定された上げ位置で停止することができる。
【図面の簡単な説明】
【0008】
【図1】トラクタに耕耘装置を装着した状態を示す側面図である。
【図2】作業機昇降装置を示す側面図である。
【図3】作業機昇降装置の別実施形態を示す側面図である。
【図4】レバーガイドに設置される上げ側ストッパの作用を示す平面図である。
【図5】作業機昇降装置の制御回路図である。
【発明を実施するための形態】
【0009】
本発明の一実施形態を図面に基づいて説明する。図1に示すトラクタ1は、走行機体後部に設置されるリフト機構(昇降リンク機構)2に、作業機連結装置(オートヒッチ)2aを介してロータリ式の耕耘装置(作業機)3を着脱自在に連結している。この耕耘装置3は、車体後部から伝動シャフト2bを介して動力を受け入れるギヤケース4と、該ギヤケース4の両側で左右方向に延設されるビームと、ビーム両端に下向きに固設されるチェンケース5及びサポート(図示せず)と、チェンケース5とサポートに軸支されるロータリ耕耘部7と、上記ギヤケース4の上部に固設されるトップマスト4a等から構成される。
【0010】
これによりトラクタ1は、伝動シャフト2b、ギヤケース4及びチェンケース5を介して耕耘装置3のロータリ耕耘部7を回転駆動し耕耘作業を行う。またリフト機構2は、トップリンク10とロワーリンク11の後部に作業機連結装置2aを連結しており、ポジションコントロールレバー15等の操作によって作動される油圧シリンダ(図示せず)の伸縮によりリフトアーム12を上下回動し、リフトロッド12a及び作業機連結装置2aを介し耕耘装置3を昇降させる。上記ポジションコントロールレバー15は操縦部8の右側フェンダ部に配設されている。
【0011】
そして、リフトアーム12を上下回動させる作業機昇降装置は、図2,図5に示すように構成している。即ち、作業機昇降装置は、ポジションコントロールレバー15のボス部を支軸16に回動自在に嵌装し、且つ該支軸16にポジションコントロールアーム17のボス部を同様に嵌装している。ポジションコントロールアーム17は、ボス部の上下側に上側アーム部17aと下側アーム部17bとを側面視で逆L字状をなすように一体形成している。上側アーム部17aは、その長さを下側アーム部17bより長くしており、その上端部にポジションコントロールレバー15の後辺に接当自在なピン17cを突設している。
【0012】
またポジションコントロールアーム17は、図示しない油圧バルブのスプールを下降側に付勢するスプリングによって、図2において時計方向に付勢されポジションコントロールレバー15に片当たり状に当接する。そして、下側アーム部17bは端部に突設したピン17dを、ロッド18の長孔18aにスライド自在に挿入している。ロッド18の基部は、電動モータ19で駆動されるアーム19aの上端部に取付けられている。上記ポジションコントロールレバー15及びポジションコントロールアーム17を軸支する支軸16と電動モータ19は、いずれも車体の後部上方に設置される油圧ケース20の右壁部に設けられている。
【0013】
ポジションコントロールレバー15は、右側フェンダに設置されるレバーガイド21のガイド溝21aに挿入されて前後方向に回動操作することができると共に、後述するレバー操作範囲調節構造によりレバーの回動範囲を調節することができる。また操縦部側から電動モータ19を正逆回転自在に切換操作する作業機昇降レバー22aのスイッチ(作業機昇降スイッチ)22は、ステアリングハンドル23の基部側に設置している。そして、機体を前後進変速操作する変速レバー24は左側フェンダに設置している。
【0014】
上記作業機昇降装置の制御回路25は図5で示すように、電動モータ19及びモータリレー部26を有するモータ回路部27と、前記作業機昇降スイッチ22及びバックアップ機能を入り切りさせるバックアップ切替スイッチ28、並びに変速レバー24を後進位置に操作したとき電動モータ19を正転させてリフトアーム12を上げ作動するバックスイッチ29等を、マイクロコンピュータ30に接続している。
【0015】
上記構成により作業機昇降装置は図2で示すように、ポジションコントロールレバー15を下げ位置から実線矢印方向に向けて後方側(上げ側)に回動操作すると、ピン17cを介して上側アーム部17aを押動し、ポジションコントロールアーム17を反時計方向に回動し油圧バルブのスプールを作動させる。これによりリフトアーム12は、油圧シリンダーを介して上げ方向に回動される。そして、リフトアーム12の回動は、フィードバックリンク12aを介して油圧バルブのスプールを作動させて油圧シリンダを停止させるので、作業機はポジションコントロールレバー15の操作位置に対応する位置まで上昇する。
【0016】
またポジションコントロールレバー15を上げ位置から下げ側操作、即ち図2の点線矢印方向に向け前方側(下げ側)に回動操作すると、ポジションコントロールアーム17は上側アーム部17aのピン17cがポジションコントロールレバー15に接当しながら、時計方向に回動し油圧バルブのスプールを作動させる。これによりリフトアーム12は、油圧シリンダーを介して下げ方向に回動される。また以上のようにポジションコントロールレバー15が操作されるとき、下側アーム部17bのピン17dは長孔18a内を移動する。
【0017】
一方、リフトアーム12が下げ位置にあるとき、変速レバー24をバック位置に操作すると、この操作に連動してバックスイッチ29が入りになり、マイクロコンピュータ30で構成する制御部は電動モータ19を正転作動させる。これによりアーム19aが時計方向に回動しロッド18を引き下げ、ピン17dが長孔18aの上端に接当した後は、ポジションコントロールアーム17を反時計方向に回動する。このときポジションコントロールアーム17は、上側アーム部17aがポジションコントロールレバー15から離れながら上げ側に向かって回動する。
【0018】
従って、耕耘装置3を下降させて行う耕耘作業時に、作業機昇降レバー22aを上げ側に操作し作業機昇降スイッチ22を入りにすると、制御部は電動モータ19を正転作動し上記と同様の作動によりリフトアーム12は上げ回動するので、耕耘装置3をスイッチ操作によって速やかに上昇させることができる。また耕耘作業時に耕耘装置3の上昇操作を失念したまま変速レバー24をバックに入れ後進したとしても、リフトアーム12は上げ回動し耕耘装置3を上昇させるので、安全に後進することができる。また上記いずれの場合も耕耘装置3の最上げ位置の設定は、後述する上げ側ストッパ33の調節位置に対応させて、ポジションコントロールアーム17の上げ側回動を規制し、電動モータ19を回動停止させることにより行われる。また変速レバー24を後進側から前進側に変速した場合、又は作業機昇降スイッチ22を下げ側に操作すると、電動モータ19が逆転作動しロッド18を上げ方向に駆動するため、リフトアーム12は下げ回動し耕耘装置3を下降させる。
【0019】
次に、上記構成からなる作業機昇降装置に設置するレバー操作範囲調節構造について図2,図4を参照し説明する。このレバー操作範囲調節構造は、レバーガイド21に穿設されるガイド溝21aの前部(下げ側)と後部(上げ側)に、溝方向に移動調節自在な下げ側ストッパ32と上げ側ストッパ33とを有している。下げ側ストッパ32と上げ側ストッパ33とはいずれもレバーガイド21に対し、ストッパ部35,36をガイド溝21a内に臨ませた状態で、ボルト37によってレバーガイド21のガイド溝側辺を緊緩自在に挟持した状態で取付けられている。
【0020】
これにより下げ側ストッパ32は、ポジションコントロールレバー15の下げ側位置を規制して、リフトアーム12の下降回動の下限位置を設定することができる。また上げ側ストッパ33は、同様にポジションコントロールレバー15の上げ側位置を規制すると共に、ポジションコントロールアーム17の上げ側回動の上限位置を設定し、リフトアーム12の上方回動高さを次のように設定することができる。
即ち、図2に示すように上げ側ストッパ33は、ストッパ部36をガイド溝21a側から下向きに長く突出させている。これにより上げ側ストッパ33は、上げ側に回動されるポジションコントロールアーム17の上側アーム部17aを接当させて、片当たりするポジションコントロールレバー15のそれ以上の回動を規制することができる。
【0021】
図2において上げ側ストッパ33は、ガイド溝21a後端の最上げ側位置からやや前方に移動調節した設定位置にあり、ポジションコントロールレバー15を上げ操作すると、片当たりしているピン17cを介して回動させたポジションコントロールアーム17をストッパ部36に接当させ、それ以上の上げ側操作が規制される。尚、上げ側ストッパ33に対しては、ポジションコントロールレバー15を接当させてもよく、この場合もポジションコントロールアーム17の上げ側回動の上限位置を設定し、リフトアーム12の上方回動高さを設定することができる。
【0022】
また作業機昇降レバー22aを上げ操作し作業機昇降スイッチ22を入りにすると、電動モータ19が回動しポジションコントロールアーム17を上げ側に回動させリフトアーム12を上方回動させながら、ポジションコントロールアーム17が設定位置でストッパ部36に接当する。これによりポジションコントロールアーム17はそれ以上の移動が規制されるため、電動モータ19はロッド18を介しアーム19aの時計方向回動が不能になるため、モータブレーカ回路によって自動的に回転停止し、それ以上の上げ側操作が規制される。
尚、この状態において作業機昇降レバー22aを下げ操作すると、電動モータ19が逆転しポジションコントロールアーム17を下げ側に向けポジションコントロールレバー15に接当するまで回動させ、接当位置において停止しリフトアーム12の下方回動も停止させる。
【0023】
上記レバー操作範囲調節構造を備える作業機昇降装置は、上げ側ストッパ33をレバーガイド21に沿って移動調節することにより、ポジションコントロールアーム17の上げ側の回動量を規制しリフトアーム12の上げ高さを規制するので、ポジションコントロールレバー15による上限設定と電動モータ19の作動による上限設定とを、1対1に対応させることができる。従って、作業者は操縦部8の操縦席に座ったまま、作業機の上げ高さを目視すると同時に上げ側ストッパ33をレバーガイド21に沿って単に前後方向に移動調節するだけで、作業機の最上げ位置の設定を行うことができる。
【0024】
以上のように構成される作業機昇降装置を備えるトラクタ1は、セットされた上げ側ストッパ33と下げ側ストッパ32との間で、ポジションコントロールレバー15を回動操作して、耕耘装置3を上昇位置と下降位置とに昇降し作業を行うことができる。そして、ハウスや果樹園内の作業或いは代掻き作業等を行う場合に、上げ側ストッパ33を予めガイド溝21aの前側に向けて移動調節することにより、耕耘装置3の最上げ位置を設定しておく。これによりトラクタ1は、耕耘装置3等各種作業機の最上げ位置が規制されて、作業機の上がり過ぎによる不具合を生じない各種の作業をスムーズに行うことができ、また作業機の上昇量を少なくして昇降動作を能率よく行うことができる。
【0025】
また作業機の最上げ位置の設定作業を行うとき、作業者は例えば、耕耘装置3上げ操作しながら返り見て耕耘装置3の上昇位置を確認し、その位置で上げ側ストッパ33を移動させることにより、上げ側ストッパ33を適正位置に速やかに設定することができる。従って、従来のものに比較し操縦席から身を屈めたり腕を大きく伸ばす等の無理な姿勢をとることなく、操縦席に座ったままの楽な姿勢で上げ側ストッパ33と耕耘装置3を目視しながら、上げ側ストッパ33を前後に移動調節するだけの簡単な動作によって、作業機の最上げ位置の設定を能率よく正確に行うことができる。
またポジションコントロールアーム17の回動規制は、ポジションコントロールアーム17を上げ側ストッパ33に接当させて規制するメカニカルな手段によって行うので、作業機の上げ高さを作業状況に適した所望位置に確実に停止させることができると共に、作業機昇降装置を簡単且つ廉価に構成にすることができる等の特徴がある。
【0026】
次に、作業機昇降装置の別実施形態について図3,図4を参照し説明する。尚、上記実施形態のものと同様な構成及び作用については説明を省略する。このレバー操作範囲調節構造の上げ側ストッパ33は、ストッパ部36を下方に長く延長した下部側にストップスイッチ38を設けている。上記ストップスイッチ38は、そのスイッチ片38aをポジションコントロールアーム17の上側アーム部17aに対して接触自在となる位置に設けている。これにより上げ側ストッパ33は、上げ側に操作されるポジションコントロールレバー15をストッパ部36に接当させることができ、それ以上の上げ側への回動操作を阻止することができる。そして、この位置でポジションコントロールアーム17が、スイッチ片38aに接当しストップスイッチ38を入りにする。
【0027】
上記ストップスイッチ38は図5に示す前記制御回路25のマイクロコンピュータ30に対し、点線で示すように接続して付加される。これにより作業機昇降スイッチ22の上げ又は変速レバー24のバック操作により、上げ側に回動するポジションコントロールアーム17がスイッチ片38aに接触した上限位置になるとき、ストップスイッチ38が入りになり電動モータ19の時計方向回転を即時停止させ、リフトアーム12の上方回動を停止し耕耘装置3を設定された最上げ位置にすることができる。
従って、この構成による作業機昇降装置を備えたトラクタ1は、耕耘装置3の上限位置以上の上昇を規制するとき、電動モータ19に過電流を流さないように即時停止することができる等の特徴がある。
【符号の説明】
【0028】
1 トラクタ
2 リフト機構(昇降リンク機構)
3 耕耘装置(作業機)
12 リフトアーム
15 ポジションコントロールレバー
17 ポジションコントロールアーム
19 電動モータ
21 レバーガイド
22 作業機昇降スイッチ
33 上げ側ストッパ
【特許請求の範囲】
【請求項1】
ポジションコントロールレバー(15)に片当たりすると共に、電動モータ(19)によって回動されるポジションコントロールアーム(17)と、リフトアーム(12)のフィードバックリンク(12a)によって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー(15)を案内するレバーガイド(21)に、ポジションコントロールアーム(17)、又はポジションコントロールアーム(17)とポジションコントロールレバー(15)にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ(33)を設けることを特徴とするトラクタの作業機昇降装置。
【請求項2】
ポジションコントロールレバー(15)に片当たりすると共に、電動モータ(19)によって回動されるポジションコントロールアーム(17)と、リフトアーム(12)のフィードバックリンク(12a)によって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー(15)を案内するレバーガイド(21)に、ポジションコントロールレバー(15)に接当して、作業機の最上げ位置を設定する上げ側ストッパ(33)を設ける一方、当該上げ側ストッパ(33)にポジションコントロールアーム(17)によって入り切りされる電動モータ(19)のストップスイッチ(38)を設けることを特徴とするトラクタの作業機昇降装置。
【請求項1】
ポジションコントロールレバー(15)に片当たりすると共に、電動モータ(19)によって回動されるポジションコントロールアーム(17)と、リフトアーム(12)のフィードバックリンク(12a)によって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー(15)を案内するレバーガイド(21)に、ポジションコントロールアーム(17)、又はポジションコントロールアーム(17)とポジションコントロールレバー(15)にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ(33)を設けることを特徴とするトラクタの作業機昇降装置。
【請求項2】
ポジションコントロールレバー(15)に片当たりすると共に、電動モータ(19)によって回動されるポジションコントロールアーム(17)と、リフトアーム(12)のフィードバックリンク(12a)によって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置において、前記ポジションコントロールレバー(15)を案内するレバーガイド(21)に、ポジションコントロールレバー(15)に接当して、作業機の最上げ位置を設定する上げ側ストッパ(33)を設ける一方、当該上げ側ストッパ(33)にポジションコントロールアーム(17)によって入り切りされる電動モータ(19)のストップスイッチ(38)を設けることを特徴とするトラクタの作業機昇降装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−161301(P2012−161301A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−26041(P2011−26041)
【出願日】平成23年2月9日(2011.2.9)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月9日(2011.2.9)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]