
トラジェクトリ管理システム、共有トラジェクトリ管理装置、個別トラジェクトリ管理装置、トラジェクトリ更新方法およびプログラム
【課題】空機の管制に際して、管制の引渡し先となるエリアの状況をより適切に反映させることができるようにする。
【解決手段】空港エリアなど個別エリアのトラジェクトリ管理装置が個別トラジェクトリを生成すると、共有トラジェクトリ管理装置100は、当該個別トラジェクトリに基づいて、軌道ないし予測軌道全体を示す共有トラジェクトリを更新する。これによって、軌道ないし予測軌道全体について精度の高いデータを得ることができる。このデータを管制に反映させることで、管制の引渡し先となるエリアの状況をより適切に反映させることができるようになる。
【解決手段】空港エリアなど個別エリアのトラジェクトリ管理装置が個別トラジェクトリを生成すると、共有トラジェクトリ管理装置100は、当該個別トラジェクトリに基づいて、軌道ないし予測軌道全体を示す共有トラジェクトリを更新する。これによって、軌道ないし予測軌道全体について精度の高いデータを得ることができる。このデータを管制に反映させることで、管制の引渡し先となるエリアの状況をより適切に反映させることができるようになる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トラジェクトリ管理システム、当該トラジェクトリ管理システムの共有トラジェクトリ管理装置、個別トラジェクトリ管理装置、トラジェクトリ更新方法およびプログラムに関する。
【背景技術】
【0002】
航空機の管制に際して、飛行計画管理システム(Flight Data Processing System、飛行計画情報管理システム)が用いられている。この飛行計画管理システムは、航空機ごとに提出されるフライトプランに基づいて、FIXと呼ばれる所定のポイント毎に航空機の通過予定位置や高度や時刻を算出し、算出したデータを飛行計画情報として管理している。
【0003】
また、航空機を管制するエリアは、空港エリア、航空路エリア、洋上エリアといったエリアに区分されている。そして、各エリアにおいて、飛行計画管理システムから配信される飛行計画情報に基づいて、航空機の予測軌道をより詳細に示すトラジェクトリと呼ばれる情報を生成し、このトラジェクトリに基づいて管制を行っている。
【0004】
また、航空機の管制に関して幾つかの技術が提案されている。例えば、特許文献1に記載の民間航空機の位置認識システムでは、管制装置が、航空機の位置データに、管制用レーダサイト又は管制情報処理システムから取得した航空機の飛行空域又は制限区域内に於ける周辺航空機の位置データを加えることにより、航空機及び周辺航空機の位置を表示できる表示データを作成する。この表示データを航空機が表示することで、民間航空機のパイロットが、自機及び周辺機の位置を認識できるとされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−157887号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、航空機を管制するエリアが区分され、区分されたエリア毎に管制を行っている。各エリア内では、トラジェクトリを生成して精密な管制を行っているが、このトラジェクトリは、各エリア内の状況に基づいて生成されており、他のエリアの状況を十分に反映していない。
また、トラジェクトリを生成する基となる飛行計画情報は、管制に必要な情報を複数のエリアにわたって提供するものの、フライトプランに基づいて生成されており、例えば各エリアの気象状況や混雑状況などの各エリアの状況を十分に反映していない。
【0007】
このように、各エリアにおいて、他のエリアの状況を十分に反映させずに管制を行うため、複数のエリアにわたって全体的に見た場合に、必ずしも好ましい管制が行われないことが考えられる。
例えば、あるエリアから次のエリアへの、航空機の管制の引渡しポイントや、引渡し時刻は、引渡し元のエリアの状況に基づいて決定され、引渡し先にとっては必ずしも好ましい管制が行われないことが考えられる。
また、特許文献1には、各エリアにおける管制に、管制の引渡し先となるエリアの状況を反映さえる技術については開示されていない。
【0008】
本発明は、このような事情を考慮してなされたものであり、その目的は、航空機の管制に際して、管制の引渡し先となるエリアの状況をより適切に反映させることのできるトラジェクトリ管理システム、共有トラジェクトリ管理装置、個別トラジェクトリ管理装置、トラジェクトリ更新方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0009】
この発明は上述した課題を解決するためになされたもので、本発明の一態様によるトラジェクトリ管理システムは、複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムであって、前記個別トラジェクトリ管理装置は、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、前記個別トラジェクトリ取得部が取得する前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、を具備し、前記共有トラジェクトリ管理装置は、前記個別トラジェクトリ送信部の送信する前記個別トラジェクトリを受信する個別トラジェクトリ受信部と、複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、を具備することを特徴とする。
【0010】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記共有トラジェクトリ管理装置は、前記共有トラジェクトリに軌道を示される航空機の性能情報を取得する性能情報取得部と、前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれるか否かを判定する接続判定部と、前記接続判定部が、前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれないと判定すると、前記共有トラジェクトリの示す軌道に含まれる点、かつ、前記共有トラジェクトリの示す経路を飛行して当該点に到達した前記性能情報に示される性能を有する航空機が、前記個別トラジェクトリの始点に到達して前記個別トラジェクトリの示す飛行経路を航行可能な点を検出する接続点決定部と、前記接続点決定部が検出する前記点と前記個別トラジェクトリの始点とを結ぶ接合経路における飛行を模擬して、前記航空機が前記接合経路を通過する際の所要時間を算出する飛行模擬部と、前記飛行模擬部が算出する前記所要時間に基づいて、前記航空機の前記個別トラジェクトリにおける飛行予定時刻を算出する再スケジューリング部と、を具備し、前記共有トラジェクトリ更新部は、前記共有トラジェクトリにおける、前記接続点決定部の検出した点以降の軌道を、前記接合経路および前記個別トラジェクトリの示す軌道で置き換え、前記際スケジューリング部は、前記共有トラジェクトリ更新部が前記置き換えを行った共有トラジェクトリのうち、前記個別トラジェクトリの示す軌道で置き換えられた部分における飛行予定時刻を、前記算出した飛行要諦時刻に更新することで、前記共有トラジェクトリを更新する、ことを特徴とする。
【0011】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記共有トラジェクトリ管理装置は、更新した共有トラジェクトリを前記個別トラジェクトリ管理装置に送信する共有トラジェクトリ送信部を具備し、前記個別トラジェクトリ管理装置は、前記共有トラジェクトリ送信部の送信する前記共有トラジェクトリを受信する共有トラジェクトリ受信部を具備し、前記個別トラジェクトリ取得部は、前記共有トラジェクトリ受信部の受信する前記共有トラジェクトリの軌道に基づいて更新された個別トラジェクトリを取得する、ことを特徴とする。
【0012】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記個別トラジェクトリ管理装置は、前記個別トラジェクトリと前記共有トラジェクトリとの間のずれの大きさを検出するずれ検出部を具備し、前記個別トラジェクトリ送信部は、前記ずれ検出部が所定の大きさ以上のずれを検出すると、前記個別トラジェクトリを前記共有トラジェクトリ管理装置に送信する、ことを特徴とする。
【0013】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記共有トラジェクトリ管理装置の前記共有トラジェクトリ送信部は、前記個別トラジェクトリ管理装置の取得する前記個別トラジェクトリよりも詳細度の低い前記共有トラジェクトリを送信する、ことを特徴とする。
【0014】
また、本発明の一態様によるトラジェクトリ管理システムは、管制対象のエリアを分割したメッシュの各々の特性情報に基づいて、航空機の軌道を示すトラジェクトリを生成する、ことを特徴とする。
【0015】
また、本発明の一態様による共有トラジェクトリ管理装置は、複数の所定エリアの各々における、同一の航空機の軌道を示す個別トラジェクトリを受信する個別トラジェクトリ受信部と、前記複数の所定エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、を具備することを特徴とする。
【0016】
また、本発明の一態様による個別トラジェクトリ管理装置は、所定エリアにおける航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、前記個別トラジェクトリ取得部が取得する個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、を具備することを特徴とする。
【0017】
また、本発明の一態様によるトラジェクトリ更新方法は、複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムのトラジェクトリ更新方法であって、前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、を具備することを特徴とする。
【0018】
また、本発明の一態様によるプログラムは、複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムを制御するプログラムであって、前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、を具備することを特徴とする。
【発明の効果】
【0019】
この発明によれば、航空機が各エリア内を飛行する経路を集約することにより、全体として最適な経路を共有することができるようになる。これにより、航空機の管制に際して、管制の引渡し先となるエリアの状況が、より適切に反映されるため、効率的に管制の引渡しを行えるようになる。また、航空機にとっても効率の良い経路を飛行できる可能性が高まる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態におけるトラジェクトリ管理システムの概略構成を示す構成図である。
【図2】同実施形態におけるフライトプランに含まれるデータ項目を示す説明図である。
【図3】同実施形態における共有トラジェクトリに含まれるデータ項目を示す説明図である。
【図4】同実施形態における個別トラジェクトリデータに含まれるデータ項目を示す説明図である。
【図5】同実施形態における気象データに含まれるデータ項目を示す説明図である。
【図6】同実施形態における傾向データに含まれるデータ項目を示す説明図である。
【図7】同実施形態にける航空機性能情報に含まれるデータ項目を示す説明図である。
【図8】同実施形態において、共有トラジェクトリ管理装置が接合処理を行う際の、共有トラジェクトリおよび個別トラジェクトリの例を示す説明図である。
【図9】同実施形態において、飛行模擬部が行う飛行模擬のイメージを示す説明図である。
【図10】同実施形態において、飛行模擬部が気象データや傾向データを取得する格子点の例を示す説明図である。
【図11】同実施形態において、気象データに含まれる垂直成分の情報のイメージを示す説明図である。
【図12】同実施形態において、飛行模擬部が、垂直方向の風を反映させて算出する上昇率の例をベクトルにて表示した説明図である。
【図13】同実施形態において、気象データに含まれる水平成分の情報のイメージを示す説明図である。
【図14】同実施形態において、飛行模擬部が、水平方向の風を反映させて算出する速度の例をベクトルにて表示した説明図である。
【図15】同実施形態において、飛行模擬部135が行う高度の接合処理の例を示す説明図である。
【図16】同実施形態において、再スケジューリング部が行う再スケジューリングの例を示す説明図である。
【図17】同実施形態において、トラジェクトリ管理システムが共有トラジェクトリおよび個別トラジェクトリを更新する処理手順を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、図面を参照して、本発明の一実施形態について説明する。
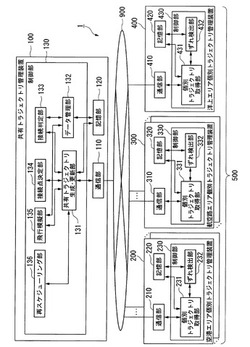
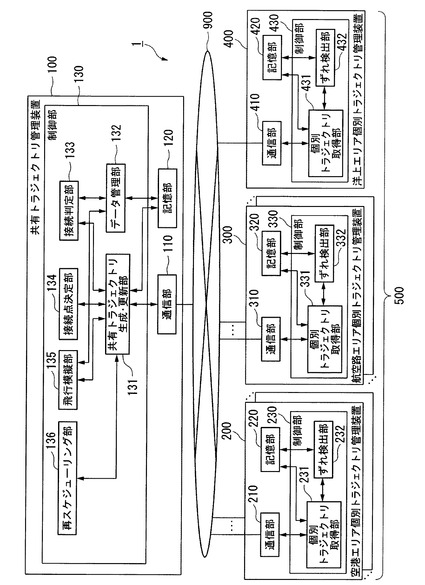
図1は、本発明の一実施形態におけるトラジェクトリ管理システム1の概略構成を示す構成図である。同図において、トラジェクトリ管理システム1は、共有トラジェクトリ管理装置100と、空港エリア個別トラジェクトリ管理装置200と、航空路エリア個別トラジェクトリ管理装置300と、洋上エリア個別トラジェクトリ管理装置400と、ネットワーク900とを具備する。
共有トラジェクトリ管理装置100は、通信部(個別トラジェクトリ受信部、共有トラジェクトリ送信部)110と、記憶部120と、制御部130とを具備する。制御部130は、共有トラジェクトリ生成・更新部131と、データ管理部(性能情報取得部)132と、接続判定部133と、接続点決定部134と、飛行模擬部135と、再スケジューリング部136とを具備する。
空港エリア個別トラジェクトリ管理装置200は、通信部210と、記憶部220と、制御部230とを具備する。制御部230は、個別トラジェクトリ取得部231と、ずれ検出部232とを具備する。
航空路エリア個別トラジェクトリ管理装置300は、通信部310と、記憶部320と、制御部330とを具備する。制御部330は、個別トラジェクトリ取得部331と、ずれ検出部332とを具備する。
洋上エリア個別トラジェクトリ管理装置400は、通信部410と、記憶部420と、制御部430とを具備する。制御部430は、個別トラジェクトリ取得部431と、ずれ検出部432とを具備する。
また、共有トラジェクトリ管理装置100の通信部110と、空港エリア個別トラジェクトリ管理装置200の通信部210と、航空路エリア個別トラジェクトリ管理装置300の通信部310と、洋上エリア個別トラジェクトリ管理装置400の通信部410とは、ネットワーク900に接続されている。
なお、空港エリア個別トラジェクトリ管理装置200と、航空路エリア個別トラジェクトリ管理装置300と、洋上エリア個別トラジェクトリ管理装置400とは、いずれも、本発明における個別トラジェクトリ管理装置の一例である。通信部210と、通信部310と、通信部410とは、いずれも、本発明における共有トラジェクトリ受信部および個別トラジェクトリ送信部の一例である。以下では、空港エリア個別トラジェクトリ管理装置200と、航空路エリア個別トラジェクトリ管理装置300と、洋上エリア個別トラジェクトリ管理装置400とをまとめて「個別トラジェクトリ管理装置500」と称する。
【0022】
トラジェクトリ管理システム1は、航空機の軌道ないし予測軌道(以下、軌道ないし予測軌道を、単に「軌道」と称する)を示すトラジェクトリとして、共有トラジェクトリと、個別トラジェクトリとを管理(生成・更新)する。
共有トラジェクトリは、航空機が離陸してから着陸するまでの全軌道を示す情報である。一方、個別トラジェクトリは、航空機の軌道のうち、個別エリアに含まれる部分の軌道を示す情報である。
【0023】
図3および図4を用いて後述するように、共有トラジェクトリと個別トラジェクトリは、いずれも、航空機の飛行経路に含まれるポイント(点、地点)毎に、当該ポイントを通過する際の航空機の水平位置(例えば緯度および経度)と、高度と、通過時刻との各情報を含む。これらの情報により、共有トラジェクトリは、航空機の軌道を、各ポイント通過時刻における位置情報にて動的に示す。すなわち、ここでいう軌道は、時刻毎の航空機の位置を示す。
これに対して、フライト全体を通しての航空機の位置の集合を、以下では「飛行経路」と称する。
【0024】
ここで、個別エリアには、空港で実施している飛行場管制業務およびターミナルレーダー管制業務を行う管制エリアである空港エリアと、管制区管制所(Area Control Center;ACC)で実施している航空路管制業務を行う管制エリアである航空路エリアと、洋上管制業務を行う管制エリアである洋上エリアとがある。
そこで、トラジェクトリ管理システム1は、空港エリア毎に空港エリア個別トラジェクトリ管理装置200を具備して各空港エリアの個別トラジェクトリを管理し、航空路エリア毎に空港エリア個別トラジェクトリ管理装置200を具備して各空港エリアの個別トラジェクトリを管理し、洋上エリアに対して洋上エリア個別トラジェクトリ管理装置400を具備して洋上エリアの個別トラジェクトリを管理する。
また、トラジェクトリ管理システム1は、共有トラジェクトリ管理装置100を具備して共有トラジェクトリを管理する。
【0025】
共有トラジェクトリ管理装置100において、通信部110は、ネットワーク900に接続されており、ネットワーク900を介して通信を行う。特に通信部110は、フライト(Flight)毎に提出されるフライトプランを受信して共有トラジェクトリ生成・更新部131に出力し、また、空港エリア個別トラジェクトリ管理装置200や航空路エリア個別トラジェクトリ管理装置300や洋上エリア個別トラジェクトリ管理装置400から送信される個別トラジェクトリを受信して共有トラジェクトリ生成・更新部131に出力し、また、共有トラジェクトリ生成・更新部131から出力される共有トラジェクトリを、空港エリア個別トラジェクトリ管理装置200や航空路エリア個別トラジェクトリ管理装置300や洋上エリア個別トラジェクトリ管理装置400に送信する。
【0026】
記憶部120は、制御部130が共有トラジェクトリを生成し更新するために用いられる各種情報や、制御部130が実行するプログラムや、制御部130が生成し更新した共有トラジェクトリを記憶する。
制御部130は、例えば共有トラジェクトリ管理装置100の具備するCPU(Central Processing Unit、中央処理装置)が、記憶部120からプログラムを読み出して実行することによって実現され、制御部130の各部を制御する。
【0027】
共有トラジェクトリ生成・更新部131は、通信部110が受信するフライトプランに基づいて共有トラジェクトリを生成し、また、通信部110が受信する個別トラジェクトリに基づいて共有トラジェクトリを更新する。
データ管理部132は、記憶部120のデータを管理しており、記憶部120へのデータの書込や記憶部120からのデータの読出しを行う。特にデータ管理部132は、接続点決定部134からの要求に応じて、最大旋回率や、高度変化率の最大値や、最高速度など、航空機の性能情報を記憶部120から読み出して接続点決定部134に出力する。
【0028】
接続判定部133は、通信部110が個別トラジェクトリを受信した際に、当該個別トラジェクトリの端点が共有トラジェクトリに接続されているか否か、すなわち、個別トラジェクトリを共有トラジェクトリに反映させるために、個別トラジェクトリを共有トラジェクトリに接続させる処理(以下、「接続処理」と称する)が必要か否かを判定する。
【0029】
接続点決定部134は、接続判定部133が、個別トラジェクトリを共有トラジェクトリに接続させる処理が必要であると判定すると、データ管理部132から出力される最大旋回率や、高度変化率の最大値や、最高速度などに基づいて、接続処理における共有トラジェクトリ側の接続点を決定する。
飛行模擬部135は、接続処理によって得られた経路の予測精度を高めるために、当該経路について飛行模擬を行う。
再スケジューリング部136は、飛行模擬部135の飛行模擬の結果に従って、接続処理によって得られた軌道のデータを修正する。
【0030】
空港エリア個別トラジェクトリ管理装置200において、通信部210は、ネットワーク900に接続されており、ネットワーク900を介して通信を行う。特に通信部210は、共有トラジェクトリ管理装置100から送信される共有トラジェクトリを受信して個別トラジェクトリ取得部231に出力し、また、個別トラジェクトリ取得部231から出力される個別トラジェクトリを共有トラジェクトリ管理装置100に送信する。
記憶部220は、制御部230が共有トラジェクトリを生成し更新するために用いられる各種情報や、制御部230が実行するプログラムや、制御部230が生成し更新した個別トラジェクトリを記憶する。
【0031】
制御部230は、例えば空港エリア個別トラジェクトリ管理装置200の具備するCPU(Central Processing Unit、中央処理装置)が、記憶部220からプログラムを読み出して実行することによって実現され、制御部230の各部を制御する。
個別トラジェクトリ取得部231は、通信部210が受信する共有トラジェクトリに基づいて、個別トラジェクトリを生成ないし更新することで、個別トラジェクトリを取得する。なお、個別トラジェクトリ取得部231が個別トラジェクトリを取得する方法は、共有トラジェクトリに基づいて個別トラジェクトリ取得部231が個別トラジェクトリを自動生成ないし自動更新する方法に限らない。例えば、空港エリア個別トラジェクトリ管理装置200が液晶ディスプレイ等の表示画面を有して、個別トラジェクトリおよび共有トラジェクトを表示画面に表示し、ユーザ(例えば空港エリア個別トラジェクトリ管理装置200の管理者)による個別トラジェクトリの生成操作ないし更新操作を受け付けることで、個別トラジェクトリ取得部231が個別トラジェクトリを取得するようにしてもよい。
【0032】
ずれ検出部232は、空港エリア個別トラジェクトリ管理装置200が共有トラジェクトリ管理装置100に個別トラジェクトリを送信するか否かの判定として、個別トラジェクトリと共有トラジェクトリとの間のずれの大きさを検出する。そして、ずれ検出部232が所定の大きさ以上のずれを検出した場合に、通信部210が個別トラジェクトリを共有トラジェクトリ管理装置100に送信する。
【0033】
航空路エリア個別トラジェクトリ管理装置300の各部は、空港エリア個別トラジェクトリ管理装置200の各部に対応して同様の機能を有しており、説明を省略する。また、洋上エリア個別トラジェクトリ管理装置400の各部も、空港エリア個別トラジェクトリ管理装置200の各部に対応して同様の機能を有しており、説明を省略する。
ネットワーク900は通信ネットワークであり、トラジェクトリ管理システム1の具備する各装置が行う通信を媒介する。
【0034】
次に、図2〜図7を参照して、共有トラジェクトリ管理装置100が用いる各種データについて説明する。
図2は、フライトプランに含まれるデータ項目を示す説明図である。フライトプランは、フライト毎に予め提出される情報である。通信部110は、フライトプランを受信すると共有トラジェクトリ生成・更新部131に出力する。そして、共有トラジェクトリ生成・更新部131は、フライトプランに基づいて共有トラジェクトリを生成する。
【0035】
図2に示すように、フライトプランには、出発空港名や、到着空港名や、FIX名など、予定航路に含まれる各ポイントの名称や、これら各ポイントの水平位置(緯度経度)の情報が含まれる。また、フライトプランには、当該フライトにおける予定高度や、予定所要時間の情報が含まれる。
【0036】
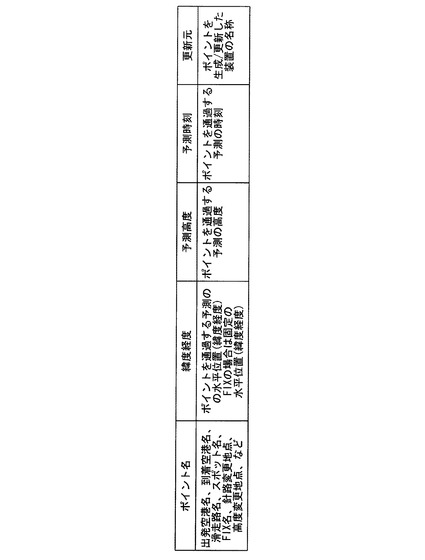
図3は、共有トラジェクトリに含まれるデータ項目を示す説明図である。共有トラジェクトリ管理装置100(共有トラジェクトリ生成・更新部131)が、共有トラジェクトリを生成・更新して個別トラジェクトリ管理装置500に送信する。共有トラジェクトリの送信を受けた個別トラジェクトリ管理装置500は、この共有トラジェクトリに基づいて、個別トラジェクトリの更新要否を判定し、更新が必要と判定した場合は個別トラジェクトリを更新する。
【0037】
図3に示すように、共有トラジェクトリには、ポイント名や、各ポイントの水平位置(緯度経度)や、ポイント通過時の予測高度や、予測時刻や、ポイントを生成又は更新した装置の名称の各情報が含まれる。
共有トラジェクトリでは、ポイント名として、出発空港名や、到着空港名や、FIX名に加えて滑走路名やスポット名など、フライトプランのポイント名よりも詳細な情報を登録可能である。また、共有トラジェクトリのポイント名では、針路変更地点や高度変更地点など、予め定められているFIX以外の点を登録することもできる。
【0038】
また、フライトプラン(図2)では、フライトにおける予定高度や予定所要時間を登録するのに対して、共有トラジェクトリでは、ポイント毎の通過予測高度や通過予測時刻を登録する。
このように、より詳細な情報を共有トラジェクトリに登録しておくことで、共有トラジェクトリにおけるフライト予測精度を高めることができる。フライト予測精度の高い共有トラジェクトリに基づいて個別トラジェクトリを生成・更新することで、個別トラジェクトリの予測精度を高めることができる。
【0039】
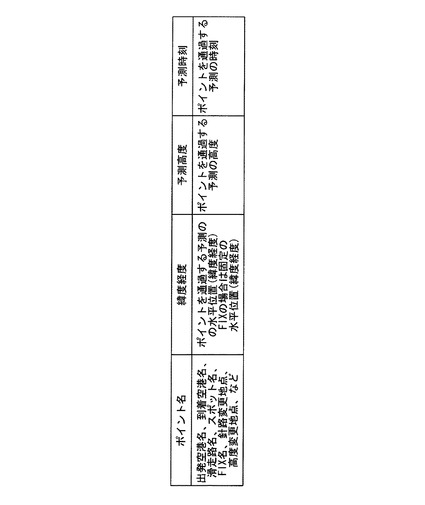
図4は、個別トラジェクトリデータに含まれるデータ項目を示す説明図である。個別トラジェクトリ管理装置500が、個別トラジェクトリを生成して共有トラジェクトリ管理装置100に送信し、共有トラジェクトリ管理装置100は、個別トラジェクトリに基づいて共有トラジェクトリを更新する。
図4に示すように、個別トラジェクトリには、ポイント名や、各ポイントの水平位置(緯度経度)や、ポイント通過時の予測高度や、予測時刻の各情報が含まれる。各情報の内容は、共有トラジェクトリの場合と同様であり、説明を省略する。
【0040】
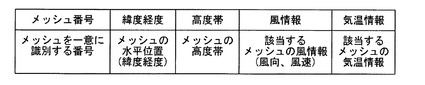
図5は、気象データに含まれるデータ項目を示す説明図である。気象データは、各点(メッシュ)における風向きや風速や気温などの、最近の一定期間の傾向あるいは季節毎の傾向などを示す統計情報である。この気象データは、記憶部120が記憶しておき、飛行模擬部135が飛行模擬を行う際に用いる。個別トラジェクトリ管理装置500の記憶部も気象データを記憶しておき、個別トラジェクトリ管理装置500が個別トラジェクトリを生成・更新する際に気象データを用いるようにしてもよい。
図5に示すように、気象データには、メッシュ番号(メッシュの識別番号)や、メッシュの緯度経度や、高度帯や、メッシュにおける風情報や、気温情報が含まれる。ここでいう「メッシュ」とは、物理空間(管制対象の空間)を東西、南北、水平方向の各々に区切って得られる個々の領域を代表する格子点である。
【0041】
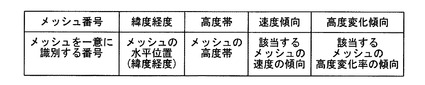
図6は、傾向データに含まれるデータ項目を示す説明図である。傾向データは、各点(メッシュ)における航空機の速度や高度変化などの傾向を示す統計的情報である。気象データとの重複を避けるため、傾向データとしては、風の影響を除外したデータが登録される。
この傾向データは、気象データ(図5)と同様、記憶部120が記憶しておき、飛行模擬部135が飛行模擬を行う際に用いる。個別トラジェクトリ管理装置500の記憶部も気象データを記憶しておき、個別トラジェクトリ管理装置500が個別トラジェクトリを生成・更新する際に気象データを用いるようにしてもよい。
図6に示すように、傾向データには、メッシュ番号(メッシュの識別番号)や、メッシュの緯度経度や、高度帯や、メッシュにおける速度傾向や、高度変化傾向の情報が含まれる。
【0042】
図7は、航空機性能情報に含まれるデータ項目を示す説明図である。航空機性能情報は、航空機毎に、その性能を示す情報である。この航空機性能情報は、記憶部120が記憶しておき、接続点決定部134が個別トラジェクトリと共有トラジェクトリとを接続可能な点を検出する際に用いる。また、飛行模擬部135が飛行模擬を行う際に、航空機性能情報を用いる。
図7に示すように、航空機性能情報は、航空機の型式と、当該型式の航空機の速度(例えば最高速度あるいは巡航速度)や、旋回率(例えば最大旋回率)や、高度変化率(例えば高度変化率の最大値)の情報が含まれる。
【0043】
次に、図8を参照して共有トラジェクトリ管理装置100が行う接合処理について説明する。
図8は、共有トラジェクトリ管理装置100が接合処理を行う際の、共有トラジェクトリおよび個別トラジェクトリの例を示す説明図である。
ここでは、共有トラジェクトリ管理装置100は、最大旋回率に基づく接合処理を行う。この最大旋回率に基づく接合処理の他に、共有トラジェクトリ管理装置100は、図16を用いて後述する高度や速度の接合処理も行う。
【0044】
通信部110が個別トラジェクトリ管理装置500からの個別トラジェクトリを受信して共有トラジェクトリ生成・更新部131に出力すると、共有トラジェクトリ生成・更新部131は、まず、共有トラジェクトリと個別トラジェクトリとを合わせる。
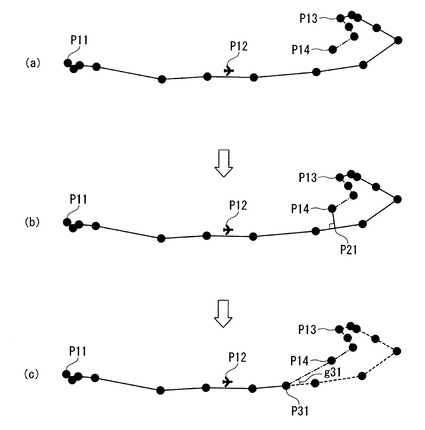
図8(a)は共有トラジェクトリと個別トラジェクトリとが合わさった例を示す。同図(a)において、点P11は出発地点の空港を示し、点P12は、航空機の現在地点を示す。また、点P13は、到着目標の空港を示し、この点P11から点P13までの線が共有トラジェクトリを示す。また、点P14から点P13までの線が、個別トラジェクトリ管理装置500から送信された個別トラジェクトリを示す。
【0045】
共有トラジェクトリ生成・更新部131が共有トラジェクトリと個別トラジェクトリとを合わせると、次に、接続判定部133が、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれるか否かを判定する。
例えば、接続判定部133は、同図(b)に示すように、個別トラジェクトリの始点P14から、共有トラジェクトリに垂線を引いて、点P14に最も近い共有トラジェクトリ上の点P21を得る。そして、接続判定部133は、点P14と点P21との距離(個別トラジェクトリの始点と共有トラジェクトリとの距離)が所定の値以下か否かを判定する。所定の値以下であれば、接続判定部133は、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれていると判定する。一方、所定の値より大きければ、接続判定部133は、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれていないと判定する。
【0046】
接続判定部133が、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれていないと判定すると、データ管理部132が、トラジェクトリに軌道を示されている航空機の最大旋回率を、記憶部120から読み出す。そして、接続点決定部134は、記憶部120の読み出した最大旋回率に基づいて、共有トラジェクトリの線上の点、かつ、最大旋回率以内で飛行可能な点を検出する。
【0047】
例えば、接続点決定部134は、個別トラジェクトリの始点P14に最も近い共有トラジェクトリ上の点P21(図8(b))から、航空機の現在の位置P12の側へと順に検索して、図8(c)の点P31において、最大旋回率以内で飛行可能である(角g31が、最大旋回率の範囲内にある)と判定して、当該点P31を検出する。
【0048】
接続点決定部134が点を検出すると、共有トラジェクトリ生成・更新部131は、接続点決定部134が検出した点と、個別トラジェクトリの始点とを結んで、更新後の共有トラジェクトリを仮生成する。図8(c)の例では、共有トラジェクトリ生成・更新部131は、接続点決定部134が検出した点P31と、個別トラジェクトリの始点P14とを結んで、更新後の共有トラジェクトリP11〜P31〜P14〜P13を仮生成する。以下では、接続点決定部134が検出した点と、個別トラジェクトリの始点とを結ぶ経路を「接合経路」と称する。共有トラジェクトリ生成・更新部131は、例えば、接続点決定部134が検出した点P31から、個別トラジェクトリの始点P14までの、線分の接合経路で両者を結ぶ。
【0049】
以上で、共有トラジェクトリ管理装置100は接合処理を完了し、次に、接合処理で得られた共有トラジェクトリと個別トラジェクトリとの接合経路における飛行模擬を行う。
飛行模擬は、飛行模擬部135が、データ管理部132を介して記憶部120から気象データや、傾向データや、航空機性能情報を読み出して行う。
【0050】
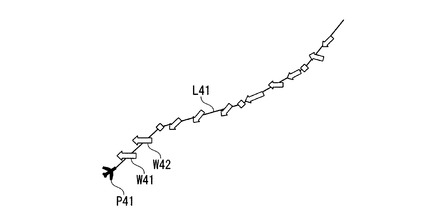
図9は、飛行模擬部135が行う飛行模擬のイメージを示す説明図である。同図において、航空機は点P41に位置している。また、経路L41は、接合処理によって得られた共有トラジェクトリと個別トラジェクトリとの接合経路を示す。また、矢印W41、W42は、接合経路の各地点における風を示している。矢印の向きで風の向きを示し、矢印の長さで風の強さを示している。この各地点における風の状況は、気象データから得られる。
【0051】
この気象データによって示される風の状況に基づいて、飛行模擬部135は、航空機の飛行速度、および、風の影響を加味した飛行経路を予測する。
飛行模擬に際して、飛行模擬部135は、気象データに加えて、傾向データも参照して飛行模擬を行う。傾向データは、各地点において航空機が一般的にとっている行動を示す統計データである。飛行模擬部135は、飛行模擬の対象となっている航空機もこの一般的な行動をとると仮定して、傾向データに基づいて飛行模擬を行う。
【0052】
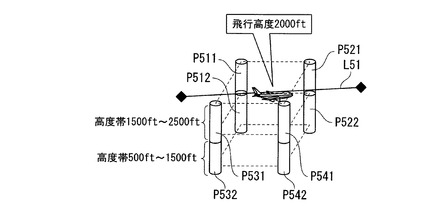
なお、気象データや傾向データを取得するにあたって、飛行模擬部135は、航空機の水平方向の位置(緯度及び経度)に加えて、垂直方向の位置(高度)も含めて最も近い格子点から、水平方向のデータに加えて垂直方向のデータも取得して飛行模擬に反映させる。
図10は、飛行模擬部135が気象データや傾向データを取得する格子点の例を示す説明図である。同図において、線L51は、航空機のトラジェクトリ(仮更新後の共有トラジェクトリ)を示している。また、同図において、点P511、P512、P521、P522、P531、P532、P541、P542の8つの格子点が示されている。
【0053】
飛行模擬部135は、まず、水平方向においてトラジェクトリに最も近い格子点を選択する。図10の例では、トラジェクトリに最も近い格子点として、点P541、P542の一列が選択される。次に、飛行模擬部135は、航空機の高度に応じた格子点を選択する。図10の例では、航空機は高度2000フィートを飛行する予定であり、この飛行高度を含む高度帯1500フィート〜2500フィートの格子点P541を選択する。
これら格子点の各々には、水平方向の気象データと、垂直方向の気象データと、水平方向の傾向データと、垂直方向の傾向データとが登録されている。
【0054】
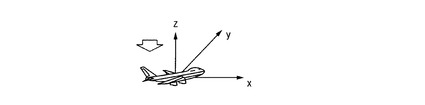
図11は、気象データに含まれる垂直成分の情報のイメージを示す説明図である。同図に示すx座標およびy座標は水平方向の座標であり、例えば、x座標が東に向き、y座標が北に向いている。一方、z座標は垂直方向の座標であり、z座標は上に向いている。
そして、同図の例では、垂直方向の風の成分として、z軸の負の向き、すなわち下向きの風が示されている。
【0055】
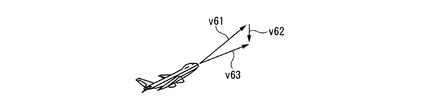
図12は、飛行模擬部135が、垂直方向の風を反映させて算出する上昇率の例をベクトルにて表示した説明図である。同図においてベクトルv61は、航空機性能情報に示される最適上昇率を示し、ベクトルv62は、気象データにおける風の垂直成分を示す。飛行模擬部135は、ベクトルv61およびv62を合成(加算)して、気象データを加味した上昇率のベクトルv63を算出する。
【0056】
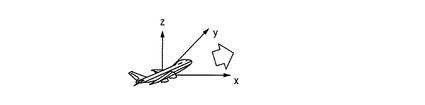
また、図13は、気象データに含まれる水平成分の情報のイメージを示す説明図である。同図に示す座標は図11で説明したのと同様である。図13では、水平方向の風の成分が示されている。
【0057】
図14は、飛行模擬部135が、水平方向の風を反映させて算出する速度の例をベクトルにて表示した説明図である。同図において、ベクトルv71は、航空機性能情報に記載されている巡航速度を示し、ベクトルv72は、気象データにおける風の水平成分を示す。飛行模擬部135は、ベクトルv71およびv72を合成(加算)して、気象データを加味した速度のベクトルv73を算出する。
【0058】
ここで、飛行模擬部135は、飛行模擬において、各ポイントの通過予定速度と、通過予定高度と、通過予定時刻とを算出する。
通過予定速度として、飛行模擬部135は、指示大気速度(Indicated Airspeed;IES)と、真大気速度(True Airspeed;TAS)と、マックナンバー(Mach Number)と、対地速度(Ground Speed;GS)とを算出する。
【0059】
指示大気速度は、ピトー静圧式速度計の目盛りを読み取って得られる値であり、飛行操作に用いられる。
真大気速度は、乱れていない大気と航空機との相対速度であり、航法に用いられる。
マックナンバーは、音速との比で示される航空機の速度であり、航空機の速度が音速に近付くと種々の障害が生じることから、航空機と音速との関係を知るために用いられる。
対地速度は、地表面に対する航空機の相対的な水平速度であり、各ポイントの通過予定時刻を算出するために用いられる。
【0060】
例えば、飛行模擬部135は、データ管理部132が記憶部120から読み出す航空機性能データおよびフライトプランに基づいて、まず、真大気速度を求める。そして、飛行模擬部135は、予め記憶する変換表を用いて、真大気速度から、指示大気速度とマックナンバーとを求める。
また、飛行模擬部135は、真大気速度の水平成分を算出し、さらに風の影響を加味して対地速度を求める。
【0061】
通過予定高度について、飛行模擬部135は、高度を変化させる区間において航空機が航空機性能データに示される高度変化率で高度を変化させるものと仮定する。そして、飛行模擬部135は、あるポイント(高度算出済みのポイント)における高度に、仮定した高度変化率のもとで算出される高度変化分を加算して、次のポイント(高度算出対象のポイント)における高度を算出する。
その際、高度14000フィート以上に関しては、飛行模擬部135は、QNH(高度計規正値)を一定として、海面を基準(高度0)とする高度を求める。一方、高度14000フィート未満に関しては、飛行模擬部135は、QNHで補正して、滑走路(滑走面)を基準とする高度を求める。
【0062】
QNHによる補正に際して、飛行模擬部135は、まず、次のポイント(高度算出対象のポイント)の緯度・経度および高度に基づいて、次のポイントにおける気温(外気温)を、記憶部120の記憶する気象情報から取得する。次に、飛行模擬部135は、取得した気温と高度とに基づいて、次のポイントにおける海面温度を算出する。
そして、飛行模擬部135は、気温と海面温度とから気圧を算出する。さらに、飛行模擬部135は、算出した気圧と、次のポイントに設定されているQNHとに基づいて、QNHで補正した高度を算出する。
【0063】
また、通過予定時刻について、飛行模擬部135は、まず、あるポイント(通過予定時刻算出済みのポイント)と次のポイント(通過予定時刻算出対象のポイント)との距離、および、対地速度に基づいて、当該あるポイントから次のポイントまでの所要時間を算出する。そして、飛行模擬部135は、あるポイントにおける通過予定時刻に所要時間を加算して、次のポイントにおける通過予定時刻を算出する。
【0064】
以上のように、飛行模擬部135は、気象データを加味した高度変化率や速度を算出する。同様にして、飛行模擬部135は、さらに傾向データも加味した高度変化率や速度を算出する。そして、飛行模擬部135は、気象データおよび傾向データを加味した高度変化率および速度を用いて、当該高度変化率および速度で飛行した場合の軌道および所要時間を算出する。
【0065】
飛行模擬を行った後、個別トラジェクトリの開始点における航空機の高度と、現在の航空機の高度とが異なる場合、飛行模擬部135は、高度の接合処理を行って途中の経路の高度を算出する。同様に、個別トラジェクトリの開始点における航空機の速度と、現在の航空機の速度とが異なる場合、飛行模擬部135は、速度の接合処理を行って途中の経路の速度を算出する。
飛行模擬部135は、個別トラジェクトリの開始点から逆順に飛行模擬を行うリバース飛行模擬によって高度や速度の接合処理を行う。なお、個別トラジェクトリの開始点における航空機の高度と、現在の航空機の高度とが同じ場合は、飛行模擬部135は、途中の経路の高度も個別トラジェクトリの開始点の高度と同一とする。同様に、個別トラジェクトリの開始点における航空機の速度と、現在の航空機の速度とが同じ場合は、飛行模擬部135は、途中の経路における速度も個別トラジェクトリの開始点における速度と同一とする。
【0066】
図15は、飛行模擬部135が行う高度の接合処理の例を示す説明図である。
同図(a)は、飛行模擬を行って得られた経路(仮の共有トラジェクトリ)の例を示す。同図(a)において、点P11から点P31までの経路は、元の共有トラジェクトリの経路の一部を示し、点P14から点P13までの経路は、個別トラジェクトリから得られた経路を示し、点P31から点P14までの経路は、最大旋回率に基づく接合処理および飛行模擬によって得られた経路を示す。
【0067】
ここで、個別トラジェクトリの開始点P14における航空機の高度が1万6千フィート(feet)であるのに対して、現在の航空機の高度は2万9千フィートとなっており、両者の値は異なる。そこで、飛行模擬部135は、航空機が所定の高度変化率(例えば、通常飛行における高度変化率として予め設定された変化率)で飛行すると想定してリバース飛行模擬を行い、現在の高度に達する位置、および、途中の各ポイントにおける高度を求める。
【0068】
図15(b)の点P82は、リバース飛行模擬を行って得られた、現在の高度に達する位置を示す。また、点P82から点P14までの途中のポイントである点P31における高度は、リバース飛行模擬によって2万5千フィートと算出されている。
また、飛行模擬部135は、現在の航空機の位置から、現在の高度に達する位置までの途中の各ポイントにおける航空機の高度を、現在の航空機の高度と同一に設定する。図15(b)では、点P81における高度が、現在の航空機の高度と同じく2万9千フィートに設定されている。
【0069】
また、飛行模擬部135は、リバース飛行模擬において、飛行模擬で算出した軌道および所要時間を再算出する(精度を高める修正を行う)。図15(b)の例では、飛行模擬部135は、個別トラジェクトリにおける点P14の通過予定時刻11時3分を基準に、点P31およびP82の通過予定時刻を算出している。具体的には、点P31から点P14までの所要時間を10分と算出し、点P14の通過予定時刻11時3分から所要時間10分を減算して、点P31の通過予定時刻を10時53分と算出している。また、点P82から点P31までの所要時間を2分と算出し、点P31の通過予定時刻10時53分から所要時間2分を減算して、点P82の通過予定時刻を10時51分と算出している。
【0070】
図15を用いて高度の接合処理について説明したのと同様に、個別トラジェクトリの開始点における航空機の速度と、現在の航空機の速度とが異なる場合、飛行模擬部135は、航空機が所定の速度変化率(加速度)で飛行すると想定してリバース飛行模擬を行い、現在の速度に達する位置や、途中の各ポイントにおける高度や、より正確な軌道や、所要時間(各ポイントの通過予定時刻)を求める。
なお、高度の接合処理と速度の接合処理との両方を行う場合、飛行模擬部は、1回のリバース飛行模擬で両方の接合処理を行うことで、接合処理に要する時間を短縮する。
なお、リバース飛行模擬の精度が飛行模擬の精度よりも低い場合は、飛行模擬部135が、リバース飛行模擬を行った区間に対してさらに飛行模擬を行って、高度や速度や軌道や所要時間の精度を高めるようにしてもよい。
【0071】
飛行模擬部135が、飛行模擬、および、必要に応じて行う高度や速度の接合処理を完了すると、再スケジューリング部136が、再スケジューリングを行う。この再スケジューリングは、個別トラジェクトリに示されていた各点の到達予測時刻を、飛行模擬の結果に基づいて修正する処理である。
【0072】
図16は、再スケジューリング部136が行う再スケジューリングの例を示す説明図である。
再スケジューリング部136は、まず、再スケジューリングの開始点を検索する。具体的には、再スケジューリング部136は、接合経路の開始点と、高度の接合処理における現在の高度に達する点と、速度の接合処理における現在の速度に達する点とのうち、最初に通過する点を検出し、検出した点(以下、「変更開始点」と称する)の直前のポイント(図3で説明した共有トラジェクトリのデータ項目が登録されているポイント。以下、「基準点」と称する)を検索する。図16の例では、再スケジューリング部136は、再スケジューリングの開始点P31と、高度の接合処理における現在の高度に達する点P82とのうち、最初に通過する点P82を変更開始点として検出し、変更開始点P82の直前のポイントP81を基準点として検出する。
【0073】
そして、再スケジューリング部136は、基準点の予定時刻を読み出す。ここで、図16(a)において、点P81の時刻は、共有トラジェクトリにて設定されている時刻であり、点P14およびP13の時刻は、個別トラジェクトリにて設定されている時刻である。また、点P82およびP31の時刻は、リバース飛行模擬によって得られて時刻である。この図16(a)の例では、再スケジューリング部136は、予定時刻「10時50分」を読み出している。
また、再スケジューリング部136は、基準点における飛行速度を読み出し、当該ポイントから変更開始点までの所要時間を算出する。そして、再スケジューリング部136は、変更開始点までの所要時間と、飛行模擬部135が算出した各点間の所要時間とを足し合わせて、元の個別トラジェクトリの始点までの所要時間を算出する。
【0074】
例えば、図16の例において、再スケジューリング部136は、点P81から点P82までの所要時間を「3分」と算出する。また、例えば、再スケジューリング部136は、飛行模擬部135が飛行模擬にて算出した、点P82から点P31までの所要時間として「2分」を取得し、点P31からP14までの所要時間として「10分」を取得する。
そして、再スケジューリング部136は、取得したこれらの時間を足し合わせて、ポイントP81から元の個別トラジェクトリの始点P14までの所要時間「15分」を取得する。
【0075】
すると、元の個別トラジェクトリの始点P14に設定されていた予定時刻「11時3分」では到達できないことになる。そこで、再スケジューリング部136は、点P14の予定時刻を点P81の予定時刻「10時50分」に、点P81からP14までの所要時間「15分」を加算した「11時5分」に、点P14の予定時刻を書き換える。
【0076】
この「11時5分」と元の「11時3分」との差分の「2分」だけ、以降の経路においても到達が遅れることになる。そこで、再スケジューリング部136は、以降の経路の点P13についても、予定時刻を「11時20分」から2分遅らせて「11時22分」とする。すなわち、再スケジューリング部136は、目的地の空港への到着予定時刻を11時22分に設定しなおす。同様に、再スケジューリング部136は、修正開始点P82以降の点のうち、通過予定時刻が設定されている各点について通過予定時刻を2分遅らせる修正を行い、点P82の通過予定時刻を10時53分とし、点P31の通過予定時刻を10時55分とする。この再スケジューリングによって得られる時刻の例を図16(b)に示す。
以上により、更新後の共有トラジェクトリにおける各点の予定時刻を到達可能な時刻に設定しなおすことが出来る。
【0077】
次に図17を参照してトラジェクトリ管理システム1の動作について説明する。
図17は、トラジェクトリ管理システム1が共有トラジェクトリおよび個別トラジェクトリを更新する処理手順を示すフローチャートである。トラジェクトリ管理システム1において通信部110がフライトプランを受信すると、トラジェクトリ管理システム1は同図の処理を開始する。
【0078】
まず、共有トラジェクトリ生成・更新部131は、通信部110が受信したフライトプランの出力を受けて、当該フライトプランを取得する(ステップS101)。
次に、共有トラジェクトリ生成・更新部131は、取得したフライトプランに基づいて共有トラジェクトリを生成する(ステップS102)。例えば、共有トラジェクトリ生成・更新部131は、フライトプランの項目を共有トラジェクトリの項目にコピーし、埋まらなかった項目について、例えば航空機性能情報に示されるデータを用いて埋めるなど、予め設定されているデフォルト処理に従って共有トラジェクトリの各項目にデータを登録する。あるいは、フライトプランに示されるデータに対して飛行模擬を行って、より精度の高い共有トラジェクトリを生成するようにしてもよい。
【0079】
そして、共有トラジェクトリ生成・更新部131は、生成した共有トラジェクトリを通信部110に出力し、通信部110は、当該共有トラジェクトリを、対象となっている航空機が通過予定の全エリアの個別トラジェクトリ管理装置500に送信する(ステップS103)。以下では、個別トラジェクトリ取得部331の例として、空港エリア個別トラジェクトリ管理装置200について説明する。航空路エリア個別トラジェクトリ管理装置300および洋上エリア個別トラジェクトリ管理装置400についても同様である。
通信部110から送信される共有トラジェクトリを通信部210が受信すると(ステップS111)、個別トラジェクトリ取得部231は、この共有トラジェクトリに基づいて個別トラジェクトリを生成する(ステップS112)。この個別トラジェクトリの生成は、個別トラジェクトリ取得部231が自動で行うようにしてもよいし、ユーザの操作入力に従って行うようにしてもよい。
【0080】
次に、個別トラジェクトリ取得部231は、必要に応じて個別トラジェクトリを更新する(ステップS113)。例えば、個別トラジェクトリ取得部231は、航空機の遅延情報を取得すると、当該遅延情報に従って個別トラジェクトリの各ポイントの予定時刻を更新する。また、個別トラジェクトリ取得部231は、気象状況の変化に応じて空港への進入方向を変更するなどの更新を行う。個別トラジェクトリ取得部231が、当該更新を自動で行うようにしてもよいし、ユーザの操作入力に従って行うようにしてもよい。
【0081】
そして、ずれ検出部232は、更新後の個別トラジェクトリと共有トラジェクトリとのずれの大きさを検出し、ずれが所定の大きさ以上か否かを判定する(ステップS114)。例えば、ずれ検出部232は、航空機の飛行経路の変更の有無や、同じポイントの通過予定時刻の差を検出し、飛行経路の変更がある場合や、通過予定時刻が所定の閾値時間(例えば5分)以上である場合に、ずれが所定の大きさ以上であると判定する。
【0082】
ずれか所定の大きさ未満であると判定した場合(ステップS114:NO)、ステップS113に戻る。
一方、ずれが所定の大きさ以上であると判定した場合(ステップS114:YES)、ずれ検出部232は、共有トラジェクトリ管理装置100に個別トラジェクトリを送信するように個別トラジェクトリ取得部231に指示し、個別トラジェクトリ取得部231は、当該指示に従って、通信部210を介して共有トラジェクトリ管理装置100に個別トラジェクトリを送信する(ステップS121)。
【0083】
そして、共有トラジェクトリ管理装置100では、通信部110が個別トラジェクトリを受信すると(ステップS131)、当該個別トラジェクトリを共有トラジェクトリ生成・更新部131に出力する。
そして、制御部130では、上述したように、接続判定部133が、個別トラジェクトリの端点が共有トラジェクトリの示す飛行経路に含まれるか否かを判定する。含まれないと判定した場合は、接続点決定部134が、接続を行う点を決定し、共有トラジェクトリ生成・更新部131が、個別トラジェクトリと共有トラジェクトリとを接合する。そして、飛行模擬部135が、接合経路に対する飛行模擬を行い、再スケジューリング部136が、飛行模擬の結果に従って再スケジューリングを行う。
これにより、制御部130は共有トラジェクトリを更新する(ステップS132)。
なお、接続判定部133が、個別トラジェクトリの端点が共有トラジェクトリの示す飛行経路に含まれると判定した場合は、そのまま個別トラジェクトリを共有トラジェクトリに接続し、個別トラジェクトリであった部分について、共通トラジェクトリにおける飛行予定時刻と個別トラジェクトリにおける飛行予定時刻とのずれに基づいて飛行予定時刻を更新することで、共有トラジェクトリを更新する。
【0084】
次に、共有トラジェクトリ生成・更新部131は、更新した共有トラジェクトリを、通信部110に出力し、通信部110は、当該共有トラジェクトリを、対象となっている航空機が通過予定の全エリアの個別トラジェクトリ管理装置500に送信する(ステップS133)。
通信部110から送信される共有トラジェクトリを通信部210が受信すると(ステップS141)、個別トラジェクトリ取得部231は、この共有トラジェクトリと個別トラジェクトリとのずれを検出して、共有トラジェクトリに基づいて個別トラジェクトリを更新する必要があるか否かを判定する(ステップS142)。
更新する必要があると判定した場合(ステップS142:NO)、個別トラジェクトリ取得部231は共有トラジェクトリに基づいて個別トラジェクトリを更新する(ステップS151)。個別トラジェクトリ取得部231が当該更新を自動で行うようにしてもよいし、ユーザの」操作入力に従って更新を行うようにしてもよい。
その後、ステップS113に戻る。
一方、ステップS142において、共有トラジェクトリに基づいて個別トラジェクトリを更新する必要がないと判定した場合(ステップS142:NO)、ステップS113に戻る。
トラジェクトリ管理システム1は、航空機が着陸してトラジェクトリの更新が不要となると、当該航空機に関して同図の処理を終了する。
【0085】
以上のように、共有トラジェクトリ管理装置100は、個別トラジェクトリに基づいて共有トラジェクトリを更新するので、航空機の軌道全体について、より精度の高い情報を得られる。すなわち、航空機が各エリア内を飛行する経路を共有トラジェクトリとして集約することにより、全体として最適な経路を共有することができるようになる。
そして、上述したように、この共有トラジェクトリに基づいて個別トラジェクトリを更新するなど、共有トラジェクトリの示す航空機の軌道全体についての情報を管制に反映させることによって、航空機の管制に際して、管制の引渡し先となるエリアの状況が、より適切に反映される。このため、効率的に管制の引渡しを行えるようになる。また、航空機にとっても、より短い航路を飛行できるなど、効率の良い経路を飛行できる可能性が高まる。
【0086】
例えば、着陸予定空港の空港エリアにおいて、空港エリア個別トラジェクトリ管理装置200が図8で説明したような個別トラジェクトリを生成した場合、図8で説明した接合処理等のように、空港エリア個別トラジェクトリ管理装置200が生成した個別トラジェクトリの部分よりも手前の部分まで、すなわち、航空路エリアの部分まで共有トラジェクトリが更新される。航空路エリアにおいて、この共有トラジェクトリを個別トラジェクトリに反映させるなど、共有トラジェクトリを管制に反映させることで、管制の引渡し先となる空港エリアの状況を適切に反映させて、当該空港エリア側が希望するポイントで管制を引き渡すことができる。
【0087】
また、通信部110が接合処理を行うことで、個別トラジェクトリの端点が共有トラジェクトリ上に無い場合にも、個別トラジェクトリに基づいて共有トラジェクトリを更新することができる。
【0088】
また、空港エリア個別トラジェクトリ管理装置200や航空路エリア個別トラジェクトリ管理装置300や洋上エリア個別トラジェクトリ管理装置400において、ずれ検出部232ずれ検出部332やずれ検出部432が、個別トラジェクトリと共有トラジェクトリとの間のずれの大きさを検出し、所定の大きさ以上のずれを検出した場合に個別トラジェクトリを送信する。従って、個別トラジェクトリと共有トラジェクトリとの間のずれが少なく、個別トラジェクトリの内容を共有トラジェクトリに反映させる必要性が低い場合は、個別トラジェクトリの送信を抑制して通信付加を低減させることができる。
【0089】
なお、通信部110が送信する共有トラジェクトリの詳細度は、個別トラジェクトリの詳細度と同様であってもよいし、あるいは、個別トラジェクトリの詳細度よりも低くてもよい。通信部110が、詳細度のより低い共有トラジェクトを送信するようにすることで、通信負荷を低減させることができる。
【0090】
また、共有トラジェクトリ管理装置100が、気象データや傾向データなど、管制対象のエリアを分割したメッシュの各々の特性情報に基づいて、共有トラジェクトリを生成することで、より精度の高い共有トラジェクトリを生成することができる。
【0091】
なお、トラジェクトリ管理システム1の全部または一部の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより各部の処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、コンパクトディスク等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0092】
以上、この発明の実施形態を図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0093】
1 トラジェクトリ管理システム
100 共有トラジェクトリ管理装置
110、210、310、410 通信部
120、220、320、420 記憶部
130、230、330、430 制御部
131 共有トラジェクトリ生成・更新部
132 データ管理部
133 接続判定部
134 接続点決定部
135 飛行模擬部
136 再スケジューリング部
200 空港エリア個別トラジェクトリ管理装置
231、331、431 個別トラジェクトリ取得部
232、332、432 ずれ検出部
300 航空路エリア個別トラジェクトリ管理装置
400 洋上エリア個別トラジェクトリ管理装置
900 ネットワーク
【技術分野】
【0001】
本発明は、トラジェクトリ管理システム、当該トラジェクトリ管理システムの共有トラジェクトリ管理装置、個別トラジェクトリ管理装置、トラジェクトリ更新方法およびプログラムに関する。
【背景技術】
【0002】
航空機の管制に際して、飛行計画管理システム(Flight Data Processing System、飛行計画情報管理システム)が用いられている。この飛行計画管理システムは、航空機ごとに提出されるフライトプランに基づいて、FIXと呼ばれる所定のポイント毎に航空機の通過予定位置や高度や時刻を算出し、算出したデータを飛行計画情報として管理している。
【0003】
また、航空機を管制するエリアは、空港エリア、航空路エリア、洋上エリアといったエリアに区分されている。そして、各エリアにおいて、飛行計画管理システムから配信される飛行計画情報に基づいて、航空機の予測軌道をより詳細に示すトラジェクトリと呼ばれる情報を生成し、このトラジェクトリに基づいて管制を行っている。
【0004】
また、航空機の管制に関して幾つかの技術が提案されている。例えば、特許文献1に記載の民間航空機の位置認識システムでは、管制装置が、航空機の位置データに、管制用レーダサイト又は管制情報処理システムから取得した航空機の飛行空域又は制限区域内に於ける周辺航空機の位置データを加えることにより、航空機及び周辺航空機の位置を表示できる表示データを作成する。この表示データを航空機が表示することで、民間航空機のパイロットが、自機及び周辺機の位置を認識できるとされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−157887号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、航空機を管制するエリアが区分され、区分されたエリア毎に管制を行っている。各エリア内では、トラジェクトリを生成して精密な管制を行っているが、このトラジェクトリは、各エリア内の状況に基づいて生成されており、他のエリアの状況を十分に反映していない。
また、トラジェクトリを生成する基となる飛行計画情報は、管制に必要な情報を複数のエリアにわたって提供するものの、フライトプランに基づいて生成されており、例えば各エリアの気象状況や混雑状況などの各エリアの状況を十分に反映していない。
【0007】
このように、各エリアにおいて、他のエリアの状況を十分に反映させずに管制を行うため、複数のエリアにわたって全体的に見た場合に、必ずしも好ましい管制が行われないことが考えられる。
例えば、あるエリアから次のエリアへの、航空機の管制の引渡しポイントや、引渡し時刻は、引渡し元のエリアの状況に基づいて決定され、引渡し先にとっては必ずしも好ましい管制が行われないことが考えられる。
また、特許文献1には、各エリアにおける管制に、管制の引渡し先となるエリアの状況を反映さえる技術については開示されていない。
【0008】
本発明は、このような事情を考慮してなされたものであり、その目的は、航空機の管制に際して、管制の引渡し先となるエリアの状況をより適切に反映させることのできるトラジェクトリ管理システム、共有トラジェクトリ管理装置、個別トラジェクトリ管理装置、トラジェクトリ更新方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0009】
この発明は上述した課題を解決するためになされたもので、本発明の一態様によるトラジェクトリ管理システムは、複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムであって、前記個別トラジェクトリ管理装置は、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、前記個別トラジェクトリ取得部が取得する前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、を具備し、前記共有トラジェクトリ管理装置は、前記個別トラジェクトリ送信部の送信する前記個別トラジェクトリを受信する個別トラジェクトリ受信部と、複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、を具備することを特徴とする。
【0010】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記共有トラジェクトリ管理装置は、前記共有トラジェクトリに軌道を示される航空機の性能情報を取得する性能情報取得部と、前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれるか否かを判定する接続判定部と、前記接続判定部が、前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれないと判定すると、前記共有トラジェクトリの示す軌道に含まれる点、かつ、前記共有トラジェクトリの示す経路を飛行して当該点に到達した前記性能情報に示される性能を有する航空機が、前記個別トラジェクトリの始点に到達して前記個別トラジェクトリの示す飛行経路を航行可能な点を検出する接続点決定部と、前記接続点決定部が検出する前記点と前記個別トラジェクトリの始点とを結ぶ接合経路における飛行を模擬して、前記航空機が前記接合経路を通過する際の所要時間を算出する飛行模擬部と、前記飛行模擬部が算出する前記所要時間に基づいて、前記航空機の前記個別トラジェクトリにおける飛行予定時刻を算出する再スケジューリング部と、を具備し、前記共有トラジェクトリ更新部は、前記共有トラジェクトリにおける、前記接続点決定部の検出した点以降の軌道を、前記接合経路および前記個別トラジェクトリの示す軌道で置き換え、前記際スケジューリング部は、前記共有トラジェクトリ更新部が前記置き換えを行った共有トラジェクトリのうち、前記個別トラジェクトリの示す軌道で置き換えられた部分における飛行予定時刻を、前記算出した飛行要諦時刻に更新することで、前記共有トラジェクトリを更新する、ことを特徴とする。
【0011】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記共有トラジェクトリ管理装置は、更新した共有トラジェクトリを前記個別トラジェクトリ管理装置に送信する共有トラジェクトリ送信部を具備し、前記個別トラジェクトリ管理装置は、前記共有トラジェクトリ送信部の送信する前記共有トラジェクトリを受信する共有トラジェクトリ受信部を具備し、前記個別トラジェクトリ取得部は、前記共有トラジェクトリ受信部の受信する前記共有トラジェクトリの軌道に基づいて更新された個別トラジェクトリを取得する、ことを特徴とする。
【0012】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記個別トラジェクトリ管理装置は、前記個別トラジェクトリと前記共有トラジェクトリとの間のずれの大きさを検出するずれ検出部を具備し、前記個別トラジェクトリ送信部は、前記ずれ検出部が所定の大きさ以上のずれを検出すると、前記個別トラジェクトリを前記共有トラジェクトリ管理装置に送信する、ことを特徴とする。
【0013】
また、本発明の一態様によるトラジェクトリ管理システムは、上述のトラジェクトリ管理システムであって、前記共有トラジェクトリ管理装置の前記共有トラジェクトリ送信部は、前記個別トラジェクトリ管理装置の取得する前記個別トラジェクトリよりも詳細度の低い前記共有トラジェクトリを送信する、ことを特徴とする。
【0014】
また、本発明の一態様によるトラジェクトリ管理システムは、管制対象のエリアを分割したメッシュの各々の特性情報に基づいて、航空機の軌道を示すトラジェクトリを生成する、ことを特徴とする。
【0015】
また、本発明の一態様による共有トラジェクトリ管理装置は、複数の所定エリアの各々における、同一の航空機の軌道を示す個別トラジェクトリを受信する個別トラジェクトリ受信部と、前記複数の所定エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、を具備することを特徴とする。
【0016】
また、本発明の一態様による個別トラジェクトリ管理装置は、所定エリアにおける航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、前記個別トラジェクトリ取得部が取得する個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、を具備することを特徴とする。
【0017】
また、本発明の一態様によるトラジェクトリ更新方法は、複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムのトラジェクトリ更新方法であって、前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、を具備することを特徴とする。
【0018】
また、本発明の一態様によるプログラムは、複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムを制御するプログラムであって、前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、を具備することを特徴とする。
【発明の効果】
【0019】
この発明によれば、航空機が各エリア内を飛行する経路を集約することにより、全体として最適な経路を共有することができるようになる。これにより、航空機の管制に際して、管制の引渡し先となるエリアの状況が、より適切に反映されるため、効率的に管制の引渡しを行えるようになる。また、航空機にとっても効率の良い経路を飛行できる可能性が高まる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態におけるトラジェクトリ管理システムの概略構成を示す構成図である。
【図2】同実施形態におけるフライトプランに含まれるデータ項目を示す説明図である。
【図3】同実施形態における共有トラジェクトリに含まれるデータ項目を示す説明図である。
【図4】同実施形態における個別トラジェクトリデータに含まれるデータ項目を示す説明図である。
【図5】同実施形態における気象データに含まれるデータ項目を示す説明図である。
【図6】同実施形態における傾向データに含まれるデータ項目を示す説明図である。
【図7】同実施形態にける航空機性能情報に含まれるデータ項目を示す説明図である。
【図8】同実施形態において、共有トラジェクトリ管理装置が接合処理を行う際の、共有トラジェクトリおよび個別トラジェクトリの例を示す説明図である。
【図9】同実施形態において、飛行模擬部が行う飛行模擬のイメージを示す説明図である。
【図10】同実施形態において、飛行模擬部が気象データや傾向データを取得する格子点の例を示す説明図である。
【図11】同実施形態において、気象データに含まれる垂直成分の情報のイメージを示す説明図である。
【図12】同実施形態において、飛行模擬部が、垂直方向の風を反映させて算出する上昇率の例をベクトルにて表示した説明図である。
【図13】同実施形態において、気象データに含まれる水平成分の情報のイメージを示す説明図である。
【図14】同実施形態において、飛行模擬部が、水平方向の風を反映させて算出する速度の例をベクトルにて表示した説明図である。
【図15】同実施形態において、飛行模擬部135が行う高度の接合処理の例を示す説明図である。
【図16】同実施形態において、再スケジューリング部が行う再スケジューリングの例を示す説明図である。
【図17】同実施形態において、トラジェクトリ管理システムが共有トラジェクトリおよび個別トラジェクトリを更新する処理手順を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、図面を参照して、本発明の一実施形態について説明する。
図1は、本発明の一実施形態におけるトラジェクトリ管理システム1の概略構成を示す構成図である。同図において、トラジェクトリ管理システム1は、共有トラジェクトリ管理装置100と、空港エリア個別トラジェクトリ管理装置200と、航空路エリア個別トラジェクトリ管理装置300と、洋上エリア個別トラジェクトリ管理装置400と、ネットワーク900とを具備する。
共有トラジェクトリ管理装置100は、通信部(個別トラジェクトリ受信部、共有トラジェクトリ送信部)110と、記憶部120と、制御部130とを具備する。制御部130は、共有トラジェクトリ生成・更新部131と、データ管理部(性能情報取得部)132と、接続判定部133と、接続点決定部134と、飛行模擬部135と、再スケジューリング部136とを具備する。
空港エリア個別トラジェクトリ管理装置200は、通信部210と、記憶部220と、制御部230とを具備する。制御部230は、個別トラジェクトリ取得部231と、ずれ検出部232とを具備する。
航空路エリア個別トラジェクトリ管理装置300は、通信部310と、記憶部320と、制御部330とを具備する。制御部330は、個別トラジェクトリ取得部331と、ずれ検出部332とを具備する。
洋上エリア個別トラジェクトリ管理装置400は、通信部410と、記憶部420と、制御部430とを具備する。制御部430は、個別トラジェクトリ取得部431と、ずれ検出部432とを具備する。
また、共有トラジェクトリ管理装置100の通信部110と、空港エリア個別トラジェクトリ管理装置200の通信部210と、航空路エリア個別トラジェクトリ管理装置300の通信部310と、洋上エリア個別トラジェクトリ管理装置400の通信部410とは、ネットワーク900に接続されている。
なお、空港エリア個別トラジェクトリ管理装置200と、航空路エリア個別トラジェクトリ管理装置300と、洋上エリア個別トラジェクトリ管理装置400とは、いずれも、本発明における個別トラジェクトリ管理装置の一例である。通信部210と、通信部310と、通信部410とは、いずれも、本発明における共有トラジェクトリ受信部および個別トラジェクトリ送信部の一例である。以下では、空港エリア個別トラジェクトリ管理装置200と、航空路エリア個別トラジェクトリ管理装置300と、洋上エリア個別トラジェクトリ管理装置400とをまとめて「個別トラジェクトリ管理装置500」と称する。
【0022】
トラジェクトリ管理システム1は、航空機の軌道ないし予測軌道(以下、軌道ないし予測軌道を、単に「軌道」と称する)を示すトラジェクトリとして、共有トラジェクトリと、個別トラジェクトリとを管理(生成・更新)する。
共有トラジェクトリは、航空機が離陸してから着陸するまでの全軌道を示す情報である。一方、個別トラジェクトリは、航空機の軌道のうち、個別エリアに含まれる部分の軌道を示す情報である。
【0023】
図3および図4を用いて後述するように、共有トラジェクトリと個別トラジェクトリは、いずれも、航空機の飛行経路に含まれるポイント(点、地点)毎に、当該ポイントを通過する際の航空機の水平位置(例えば緯度および経度)と、高度と、通過時刻との各情報を含む。これらの情報により、共有トラジェクトリは、航空機の軌道を、各ポイント通過時刻における位置情報にて動的に示す。すなわち、ここでいう軌道は、時刻毎の航空機の位置を示す。
これに対して、フライト全体を通しての航空機の位置の集合を、以下では「飛行経路」と称する。
【0024】
ここで、個別エリアには、空港で実施している飛行場管制業務およびターミナルレーダー管制業務を行う管制エリアである空港エリアと、管制区管制所(Area Control Center;ACC)で実施している航空路管制業務を行う管制エリアである航空路エリアと、洋上管制業務を行う管制エリアである洋上エリアとがある。
そこで、トラジェクトリ管理システム1は、空港エリア毎に空港エリア個別トラジェクトリ管理装置200を具備して各空港エリアの個別トラジェクトリを管理し、航空路エリア毎に空港エリア個別トラジェクトリ管理装置200を具備して各空港エリアの個別トラジェクトリを管理し、洋上エリアに対して洋上エリア個別トラジェクトリ管理装置400を具備して洋上エリアの個別トラジェクトリを管理する。
また、トラジェクトリ管理システム1は、共有トラジェクトリ管理装置100を具備して共有トラジェクトリを管理する。
【0025】
共有トラジェクトリ管理装置100において、通信部110は、ネットワーク900に接続されており、ネットワーク900を介して通信を行う。特に通信部110は、フライト(Flight)毎に提出されるフライトプランを受信して共有トラジェクトリ生成・更新部131に出力し、また、空港エリア個別トラジェクトリ管理装置200や航空路エリア個別トラジェクトリ管理装置300や洋上エリア個別トラジェクトリ管理装置400から送信される個別トラジェクトリを受信して共有トラジェクトリ生成・更新部131に出力し、また、共有トラジェクトリ生成・更新部131から出力される共有トラジェクトリを、空港エリア個別トラジェクトリ管理装置200や航空路エリア個別トラジェクトリ管理装置300や洋上エリア個別トラジェクトリ管理装置400に送信する。
【0026】
記憶部120は、制御部130が共有トラジェクトリを生成し更新するために用いられる各種情報や、制御部130が実行するプログラムや、制御部130が生成し更新した共有トラジェクトリを記憶する。
制御部130は、例えば共有トラジェクトリ管理装置100の具備するCPU(Central Processing Unit、中央処理装置)が、記憶部120からプログラムを読み出して実行することによって実現され、制御部130の各部を制御する。
【0027】
共有トラジェクトリ生成・更新部131は、通信部110が受信するフライトプランに基づいて共有トラジェクトリを生成し、また、通信部110が受信する個別トラジェクトリに基づいて共有トラジェクトリを更新する。
データ管理部132は、記憶部120のデータを管理しており、記憶部120へのデータの書込や記憶部120からのデータの読出しを行う。特にデータ管理部132は、接続点決定部134からの要求に応じて、最大旋回率や、高度変化率の最大値や、最高速度など、航空機の性能情報を記憶部120から読み出して接続点決定部134に出力する。
【0028】
接続判定部133は、通信部110が個別トラジェクトリを受信した際に、当該個別トラジェクトリの端点が共有トラジェクトリに接続されているか否か、すなわち、個別トラジェクトリを共有トラジェクトリに反映させるために、個別トラジェクトリを共有トラジェクトリに接続させる処理(以下、「接続処理」と称する)が必要か否かを判定する。
【0029】
接続点決定部134は、接続判定部133が、個別トラジェクトリを共有トラジェクトリに接続させる処理が必要であると判定すると、データ管理部132から出力される最大旋回率や、高度変化率の最大値や、最高速度などに基づいて、接続処理における共有トラジェクトリ側の接続点を決定する。
飛行模擬部135は、接続処理によって得られた経路の予測精度を高めるために、当該経路について飛行模擬を行う。
再スケジューリング部136は、飛行模擬部135の飛行模擬の結果に従って、接続処理によって得られた軌道のデータを修正する。
【0030】
空港エリア個別トラジェクトリ管理装置200において、通信部210は、ネットワーク900に接続されており、ネットワーク900を介して通信を行う。特に通信部210は、共有トラジェクトリ管理装置100から送信される共有トラジェクトリを受信して個別トラジェクトリ取得部231に出力し、また、個別トラジェクトリ取得部231から出力される個別トラジェクトリを共有トラジェクトリ管理装置100に送信する。
記憶部220は、制御部230が共有トラジェクトリを生成し更新するために用いられる各種情報や、制御部230が実行するプログラムや、制御部230が生成し更新した個別トラジェクトリを記憶する。
【0031】
制御部230は、例えば空港エリア個別トラジェクトリ管理装置200の具備するCPU(Central Processing Unit、中央処理装置)が、記憶部220からプログラムを読み出して実行することによって実現され、制御部230の各部を制御する。
個別トラジェクトリ取得部231は、通信部210が受信する共有トラジェクトリに基づいて、個別トラジェクトリを生成ないし更新することで、個別トラジェクトリを取得する。なお、個別トラジェクトリ取得部231が個別トラジェクトリを取得する方法は、共有トラジェクトリに基づいて個別トラジェクトリ取得部231が個別トラジェクトリを自動生成ないし自動更新する方法に限らない。例えば、空港エリア個別トラジェクトリ管理装置200が液晶ディスプレイ等の表示画面を有して、個別トラジェクトリおよび共有トラジェクトを表示画面に表示し、ユーザ(例えば空港エリア個別トラジェクトリ管理装置200の管理者)による個別トラジェクトリの生成操作ないし更新操作を受け付けることで、個別トラジェクトリ取得部231が個別トラジェクトリを取得するようにしてもよい。
【0032】
ずれ検出部232は、空港エリア個別トラジェクトリ管理装置200が共有トラジェクトリ管理装置100に個別トラジェクトリを送信するか否かの判定として、個別トラジェクトリと共有トラジェクトリとの間のずれの大きさを検出する。そして、ずれ検出部232が所定の大きさ以上のずれを検出した場合に、通信部210が個別トラジェクトリを共有トラジェクトリ管理装置100に送信する。
【0033】
航空路エリア個別トラジェクトリ管理装置300の各部は、空港エリア個別トラジェクトリ管理装置200の各部に対応して同様の機能を有しており、説明を省略する。また、洋上エリア個別トラジェクトリ管理装置400の各部も、空港エリア個別トラジェクトリ管理装置200の各部に対応して同様の機能を有しており、説明を省略する。
ネットワーク900は通信ネットワークであり、トラジェクトリ管理システム1の具備する各装置が行う通信を媒介する。
【0034】
次に、図2〜図7を参照して、共有トラジェクトリ管理装置100が用いる各種データについて説明する。
図2は、フライトプランに含まれるデータ項目を示す説明図である。フライトプランは、フライト毎に予め提出される情報である。通信部110は、フライトプランを受信すると共有トラジェクトリ生成・更新部131に出力する。そして、共有トラジェクトリ生成・更新部131は、フライトプランに基づいて共有トラジェクトリを生成する。
【0035】
図2に示すように、フライトプランには、出発空港名や、到着空港名や、FIX名など、予定航路に含まれる各ポイントの名称や、これら各ポイントの水平位置(緯度経度)の情報が含まれる。また、フライトプランには、当該フライトにおける予定高度や、予定所要時間の情報が含まれる。
【0036】
図3は、共有トラジェクトリに含まれるデータ項目を示す説明図である。共有トラジェクトリ管理装置100(共有トラジェクトリ生成・更新部131)が、共有トラジェクトリを生成・更新して個別トラジェクトリ管理装置500に送信する。共有トラジェクトリの送信を受けた個別トラジェクトリ管理装置500は、この共有トラジェクトリに基づいて、個別トラジェクトリの更新要否を判定し、更新が必要と判定した場合は個別トラジェクトリを更新する。
【0037】
図3に示すように、共有トラジェクトリには、ポイント名や、各ポイントの水平位置(緯度経度)や、ポイント通過時の予測高度や、予測時刻や、ポイントを生成又は更新した装置の名称の各情報が含まれる。
共有トラジェクトリでは、ポイント名として、出発空港名や、到着空港名や、FIX名に加えて滑走路名やスポット名など、フライトプランのポイント名よりも詳細な情報を登録可能である。また、共有トラジェクトリのポイント名では、針路変更地点や高度変更地点など、予め定められているFIX以外の点を登録することもできる。
【0038】
また、フライトプラン(図2)では、フライトにおける予定高度や予定所要時間を登録するのに対して、共有トラジェクトリでは、ポイント毎の通過予測高度や通過予測時刻を登録する。
このように、より詳細な情報を共有トラジェクトリに登録しておくことで、共有トラジェクトリにおけるフライト予測精度を高めることができる。フライト予測精度の高い共有トラジェクトリに基づいて個別トラジェクトリを生成・更新することで、個別トラジェクトリの予測精度を高めることができる。
【0039】
図4は、個別トラジェクトリデータに含まれるデータ項目を示す説明図である。個別トラジェクトリ管理装置500が、個別トラジェクトリを生成して共有トラジェクトリ管理装置100に送信し、共有トラジェクトリ管理装置100は、個別トラジェクトリに基づいて共有トラジェクトリを更新する。
図4に示すように、個別トラジェクトリには、ポイント名や、各ポイントの水平位置(緯度経度)や、ポイント通過時の予測高度や、予測時刻の各情報が含まれる。各情報の内容は、共有トラジェクトリの場合と同様であり、説明を省略する。
【0040】
図5は、気象データに含まれるデータ項目を示す説明図である。気象データは、各点(メッシュ)における風向きや風速や気温などの、最近の一定期間の傾向あるいは季節毎の傾向などを示す統計情報である。この気象データは、記憶部120が記憶しておき、飛行模擬部135が飛行模擬を行う際に用いる。個別トラジェクトリ管理装置500の記憶部も気象データを記憶しておき、個別トラジェクトリ管理装置500が個別トラジェクトリを生成・更新する際に気象データを用いるようにしてもよい。
図5に示すように、気象データには、メッシュ番号(メッシュの識別番号)や、メッシュの緯度経度や、高度帯や、メッシュにおける風情報や、気温情報が含まれる。ここでいう「メッシュ」とは、物理空間(管制対象の空間)を東西、南北、水平方向の各々に区切って得られる個々の領域を代表する格子点である。
【0041】
図6は、傾向データに含まれるデータ項目を示す説明図である。傾向データは、各点(メッシュ)における航空機の速度や高度変化などの傾向を示す統計的情報である。気象データとの重複を避けるため、傾向データとしては、風の影響を除外したデータが登録される。
この傾向データは、気象データ(図5)と同様、記憶部120が記憶しておき、飛行模擬部135が飛行模擬を行う際に用いる。個別トラジェクトリ管理装置500の記憶部も気象データを記憶しておき、個別トラジェクトリ管理装置500が個別トラジェクトリを生成・更新する際に気象データを用いるようにしてもよい。
図6に示すように、傾向データには、メッシュ番号(メッシュの識別番号)や、メッシュの緯度経度や、高度帯や、メッシュにおける速度傾向や、高度変化傾向の情報が含まれる。
【0042】
図7は、航空機性能情報に含まれるデータ項目を示す説明図である。航空機性能情報は、航空機毎に、その性能を示す情報である。この航空機性能情報は、記憶部120が記憶しておき、接続点決定部134が個別トラジェクトリと共有トラジェクトリとを接続可能な点を検出する際に用いる。また、飛行模擬部135が飛行模擬を行う際に、航空機性能情報を用いる。
図7に示すように、航空機性能情報は、航空機の型式と、当該型式の航空機の速度(例えば最高速度あるいは巡航速度)や、旋回率(例えば最大旋回率)や、高度変化率(例えば高度変化率の最大値)の情報が含まれる。
【0043】
次に、図8を参照して共有トラジェクトリ管理装置100が行う接合処理について説明する。
図8は、共有トラジェクトリ管理装置100が接合処理を行う際の、共有トラジェクトリおよび個別トラジェクトリの例を示す説明図である。
ここでは、共有トラジェクトリ管理装置100は、最大旋回率に基づく接合処理を行う。この最大旋回率に基づく接合処理の他に、共有トラジェクトリ管理装置100は、図16を用いて後述する高度や速度の接合処理も行う。
【0044】
通信部110が個別トラジェクトリ管理装置500からの個別トラジェクトリを受信して共有トラジェクトリ生成・更新部131に出力すると、共有トラジェクトリ生成・更新部131は、まず、共有トラジェクトリと個別トラジェクトリとを合わせる。
図8(a)は共有トラジェクトリと個別トラジェクトリとが合わさった例を示す。同図(a)において、点P11は出発地点の空港を示し、点P12は、航空機の現在地点を示す。また、点P13は、到着目標の空港を示し、この点P11から点P13までの線が共有トラジェクトリを示す。また、点P14から点P13までの線が、個別トラジェクトリ管理装置500から送信された個別トラジェクトリを示す。
【0045】
共有トラジェクトリ生成・更新部131が共有トラジェクトリと個別トラジェクトリとを合わせると、次に、接続判定部133が、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれるか否かを判定する。
例えば、接続判定部133は、同図(b)に示すように、個別トラジェクトリの始点P14から、共有トラジェクトリに垂線を引いて、点P14に最も近い共有トラジェクトリ上の点P21を得る。そして、接続判定部133は、点P14と点P21との距離(個別トラジェクトリの始点と共有トラジェクトリとの距離)が所定の値以下か否かを判定する。所定の値以下であれば、接続判定部133は、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれていると判定する。一方、所定の値より大きければ、接続判定部133は、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれていないと判定する。
【0046】
接続判定部133が、個別トラジェクトリの始点が共有トラジェクトリの示す飛行経路に含まれていないと判定すると、データ管理部132が、トラジェクトリに軌道を示されている航空機の最大旋回率を、記憶部120から読み出す。そして、接続点決定部134は、記憶部120の読み出した最大旋回率に基づいて、共有トラジェクトリの線上の点、かつ、最大旋回率以内で飛行可能な点を検出する。
【0047】
例えば、接続点決定部134は、個別トラジェクトリの始点P14に最も近い共有トラジェクトリ上の点P21(図8(b))から、航空機の現在の位置P12の側へと順に検索して、図8(c)の点P31において、最大旋回率以内で飛行可能である(角g31が、最大旋回率の範囲内にある)と判定して、当該点P31を検出する。
【0048】
接続点決定部134が点を検出すると、共有トラジェクトリ生成・更新部131は、接続点決定部134が検出した点と、個別トラジェクトリの始点とを結んで、更新後の共有トラジェクトリを仮生成する。図8(c)の例では、共有トラジェクトリ生成・更新部131は、接続点決定部134が検出した点P31と、個別トラジェクトリの始点P14とを結んで、更新後の共有トラジェクトリP11〜P31〜P14〜P13を仮生成する。以下では、接続点決定部134が検出した点と、個別トラジェクトリの始点とを結ぶ経路を「接合経路」と称する。共有トラジェクトリ生成・更新部131は、例えば、接続点決定部134が検出した点P31から、個別トラジェクトリの始点P14までの、線分の接合経路で両者を結ぶ。
【0049】
以上で、共有トラジェクトリ管理装置100は接合処理を完了し、次に、接合処理で得られた共有トラジェクトリと個別トラジェクトリとの接合経路における飛行模擬を行う。
飛行模擬は、飛行模擬部135が、データ管理部132を介して記憶部120から気象データや、傾向データや、航空機性能情報を読み出して行う。
【0050】
図9は、飛行模擬部135が行う飛行模擬のイメージを示す説明図である。同図において、航空機は点P41に位置している。また、経路L41は、接合処理によって得られた共有トラジェクトリと個別トラジェクトリとの接合経路を示す。また、矢印W41、W42は、接合経路の各地点における風を示している。矢印の向きで風の向きを示し、矢印の長さで風の強さを示している。この各地点における風の状況は、気象データから得られる。
【0051】
この気象データによって示される風の状況に基づいて、飛行模擬部135は、航空機の飛行速度、および、風の影響を加味した飛行経路を予測する。
飛行模擬に際して、飛行模擬部135は、気象データに加えて、傾向データも参照して飛行模擬を行う。傾向データは、各地点において航空機が一般的にとっている行動を示す統計データである。飛行模擬部135は、飛行模擬の対象となっている航空機もこの一般的な行動をとると仮定して、傾向データに基づいて飛行模擬を行う。
【0052】
なお、気象データや傾向データを取得するにあたって、飛行模擬部135は、航空機の水平方向の位置(緯度及び経度)に加えて、垂直方向の位置(高度)も含めて最も近い格子点から、水平方向のデータに加えて垂直方向のデータも取得して飛行模擬に反映させる。
図10は、飛行模擬部135が気象データや傾向データを取得する格子点の例を示す説明図である。同図において、線L51は、航空機のトラジェクトリ(仮更新後の共有トラジェクトリ)を示している。また、同図において、点P511、P512、P521、P522、P531、P532、P541、P542の8つの格子点が示されている。
【0053】
飛行模擬部135は、まず、水平方向においてトラジェクトリに最も近い格子点を選択する。図10の例では、トラジェクトリに最も近い格子点として、点P541、P542の一列が選択される。次に、飛行模擬部135は、航空機の高度に応じた格子点を選択する。図10の例では、航空機は高度2000フィートを飛行する予定であり、この飛行高度を含む高度帯1500フィート〜2500フィートの格子点P541を選択する。
これら格子点の各々には、水平方向の気象データと、垂直方向の気象データと、水平方向の傾向データと、垂直方向の傾向データとが登録されている。
【0054】
図11は、気象データに含まれる垂直成分の情報のイメージを示す説明図である。同図に示すx座標およびy座標は水平方向の座標であり、例えば、x座標が東に向き、y座標が北に向いている。一方、z座標は垂直方向の座標であり、z座標は上に向いている。
そして、同図の例では、垂直方向の風の成分として、z軸の負の向き、すなわち下向きの風が示されている。
【0055】
図12は、飛行模擬部135が、垂直方向の風を反映させて算出する上昇率の例をベクトルにて表示した説明図である。同図においてベクトルv61は、航空機性能情報に示される最適上昇率を示し、ベクトルv62は、気象データにおける風の垂直成分を示す。飛行模擬部135は、ベクトルv61およびv62を合成(加算)して、気象データを加味した上昇率のベクトルv63を算出する。
【0056】
また、図13は、気象データに含まれる水平成分の情報のイメージを示す説明図である。同図に示す座標は図11で説明したのと同様である。図13では、水平方向の風の成分が示されている。
【0057】
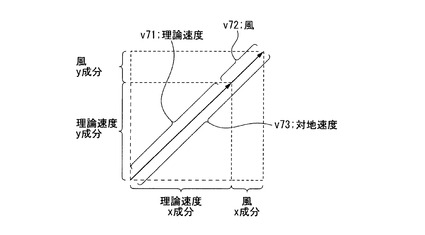
図14は、飛行模擬部135が、水平方向の風を反映させて算出する速度の例をベクトルにて表示した説明図である。同図において、ベクトルv71は、航空機性能情報に記載されている巡航速度を示し、ベクトルv72は、気象データにおける風の水平成分を示す。飛行模擬部135は、ベクトルv71およびv72を合成(加算)して、気象データを加味した速度のベクトルv73を算出する。
【0058】
ここで、飛行模擬部135は、飛行模擬において、各ポイントの通過予定速度と、通過予定高度と、通過予定時刻とを算出する。
通過予定速度として、飛行模擬部135は、指示大気速度(Indicated Airspeed;IES)と、真大気速度(True Airspeed;TAS)と、マックナンバー(Mach Number)と、対地速度(Ground Speed;GS)とを算出する。
【0059】
指示大気速度は、ピトー静圧式速度計の目盛りを読み取って得られる値であり、飛行操作に用いられる。
真大気速度は、乱れていない大気と航空機との相対速度であり、航法に用いられる。
マックナンバーは、音速との比で示される航空機の速度であり、航空機の速度が音速に近付くと種々の障害が生じることから、航空機と音速との関係を知るために用いられる。
対地速度は、地表面に対する航空機の相対的な水平速度であり、各ポイントの通過予定時刻を算出するために用いられる。
【0060】
例えば、飛行模擬部135は、データ管理部132が記憶部120から読み出す航空機性能データおよびフライトプランに基づいて、まず、真大気速度を求める。そして、飛行模擬部135は、予め記憶する変換表を用いて、真大気速度から、指示大気速度とマックナンバーとを求める。
また、飛行模擬部135は、真大気速度の水平成分を算出し、さらに風の影響を加味して対地速度を求める。
【0061】
通過予定高度について、飛行模擬部135は、高度を変化させる区間において航空機が航空機性能データに示される高度変化率で高度を変化させるものと仮定する。そして、飛行模擬部135は、あるポイント(高度算出済みのポイント)における高度に、仮定した高度変化率のもとで算出される高度変化分を加算して、次のポイント(高度算出対象のポイント)における高度を算出する。
その際、高度14000フィート以上に関しては、飛行模擬部135は、QNH(高度計規正値)を一定として、海面を基準(高度0)とする高度を求める。一方、高度14000フィート未満に関しては、飛行模擬部135は、QNHで補正して、滑走路(滑走面)を基準とする高度を求める。
【0062】
QNHによる補正に際して、飛行模擬部135は、まず、次のポイント(高度算出対象のポイント)の緯度・経度および高度に基づいて、次のポイントにおける気温(外気温)を、記憶部120の記憶する気象情報から取得する。次に、飛行模擬部135は、取得した気温と高度とに基づいて、次のポイントにおける海面温度を算出する。
そして、飛行模擬部135は、気温と海面温度とから気圧を算出する。さらに、飛行模擬部135は、算出した気圧と、次のポイントに設定されているQNHとに基づいて、QNHで補正した高度を算出する。
【0063】
また、通過予定時刻について、飛行模擬部135は、まず、あるポイント(通過予定時刻算出済みのポイント)と次のポイント(通過予定時刻算出対象のポイント)との距離、および、対地速度に基づいて、当該あるポイントから次のポイントまでの所要時間を算出する。そして、飛行模擬部135は、あるポイントにおける通過予定時刻に所要時間を加算して、次のポイントにおける通過予定時刻を算出する。
【0064】
以上のように、飛行模擬部135は、気象データを加味した高度変化率や速度を算出する。同様にして、飛行模擬部135は、さらに傾向データも加味した高度変化率や速度を算出する。そして、飛行模擬部135は、気象データおよび傾向データを加味した高度変化率および速度を用いて、当該高度変化率および速度で飛行した場合の軌道および所要時間を算出する。
【0065】
飛行模擬を行った後、個別トラジェクトリの開始点における航空機の高度と、現在の航空機の高度とが異なる場合、飛行模擬部135は、高度の接合処理を行って途中の経路の高度を算出する。同様に、個別トラジェクトリの開始点における航空機の速度と、現在の航空機の速度とが異なる場合、飛行模擬部135は、速度の接合処理を行って途中の経路の速度を算出する。
飛行模擬部135は、個別トラジェクトリの開始点から逆順に飛行模擬を行うリバース飛行模擬によって高度や速度の接合処理を行う。なお、個別トラジェクトリの開始点における航空機の高度と、現在の航空機の高度とが同じ場合は、飛行模擬部135は、途中の経路の高度も個別トラジェクトリの開始点の高度と同一とする。同様に、個別トラジェクトリの開始点における航空機の速度と、現在の航空機の速度とが同じ場合は、飛行模擬部135は、途中の経路における速度も個別トラジェクトリの開始点における速度と同一とする。
【0066】
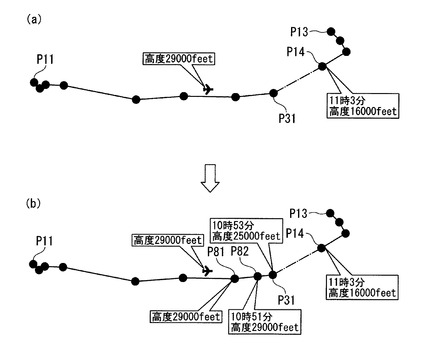
図15は、飛行模擬部135が行う高度の接合処理の例を示す説明図である。
同図(a)は、飛行模擬を行って得られた経路(仮の共有トラジェクトリ)の例を示す。同図(a)において、点P11から点P31までの経路は、元の共有トラジェクトリの経路の一部を示し、点P14から点P13までの経路は、個別トラジェクトリから得られた経路を示し、点P31から点P14までの経路は、最大旋回率に基づく接合処理および飛行模擬によって得られた経路を示す。
【0067】
ここで、個別トラジェクトリの開始点P14における航空機の高度が1万6千フィート(feet)であるのに対して、現在の航空機の高度は2万9千フィートとなっており、両者の値は異なる。そこで、飛行模擬部135は、航空機が所定の高度変化率(例えば、通常飛行における高度変化率として予め設定された変化率)で飛行すると想定してリバース飛行模擬を行い、現在の高度に達する位置、および、途中の各ポイントにおける高度を求める。
【0068】
図15(b)の点P82は、リバース飛行模擬を行って得られた、現在の高度に達する位置を示す。また、点P82から点P14までの途中のポイントである点P31における高度は、リバース飛行模擬によって2万5千フィートと算出されている。
また、飛行模擬部135は、現在の航空機の位置から、現在の高度に達する位置までの途中の各ポイントにおける航空機の高度を、現在の航空機の高度と同一に設定する。図15(b)では、点P81における高度が、現在の航空機の高度と同じく2万9千フィートに設定されている。
【0069】
また、飛行模擬部135は、リバース飛行模擬において、飛行模擬で算出した軌道および所要時間を再算出する(精度を高める修正を行う)。図15(b)の例では、飛行模擬部135は、個別トラジェクトリにおける点P14の通過予定時刻11時3分を基準に、点P31およびP82の通過予定時刻を算出している。具体的には、点P31から点P14までの所要時間を10分と算出し、点P14の通過予定時刻11時3分から所要時間10分を減算して、点P31の通過予定時刻を10時53分と算出している。また、点P82から点P31までの所要時間を2分と算出し、点P31の通過予定時刻10時53分から所要時間2分を減算して、点P82の通過予定時刻を10時51分と算出している。
【0070】
図15を用いて高度の接合処理について説明したのと同様に、個別トラジェクトリの開始点における航空機の速度と、現在の航空機の速度とが異なる場合、飛行模擬部135は、航空機が所定の速度変化率(加速度)で飛行すると想定してリバース飛行模擬を行い、現在の速度に達する位置や、途中の各ポイントにおける高度や、より正確な軌道や、所要時間(各ポイントの通過予定時刻)を求める。
なお、高度の接合処理と速度の接合処理との両方を行う場合、飛行模擬部は、1回のリバース飛行模擬で両方の接合処理を行うことで、接合処理に要する時間を短縮する。
なお、リバース飛行模擬の精度が飛行模擬の精度よりも低い場合は、飛行模擬部135が、リバース飛行模擬を行った区間に対してさらに飛行模擬を行って、高度や速度や軌道や所要時間の精度を高めるようにしてもよい。
【0071】
飛行模擬部135が、飛行模擬、および、必要に応じて行う高度や速度の接合処理を完了すると、再スケジューリング部136が、再スケジューリングを行う。この再スケジューリングは、個別トラジェクトリに示されていた各点の到達予測時刻を、飛行模擬の結果に基づいて修正する処理である。
【0072】
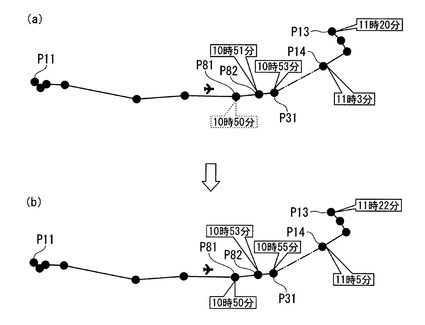
図16は、再スケジューリング部136が行う再スケジューリングの例を示す説明図である。
再スケジューリング部136は、まず、再スケジューリングの開始点を検索する。具体的には、再スケジューリング部136は、接合経路の開始点と、高度の接合処理における現在の高度に達する点と、速度の接合処理における現在の速度に達する点とのうち、最初に通過する点を検出し、検出した点(以下、「変更開始点」と称する)の直前のポイント(図3で説明した共有トラジェクトリのデータ項目が登録されているポイント。以下、「基準点」と称する)を検索する。図16の例では、再スケジューリング部136は、再スケジューリングの開始点P31と、高度の接合処理における現在の高度に達する点P82とのうち、最初に通過する点P82を変更開始点として検出し、変更開始点P82の直前のポイントP81を基準点として検出する。
【0073】
そして、再スケジューリング部136は、基準点の予定時刻を読み出す。ここで、図16(a)において、点P81の時刻は、共有トラジェクトリにて設定されている時刻であり、点P14およびP13の時刻は、個別トラジェクトリにて設定されている時刻である。また、点P82およびP31の時刻は、リバース飛行模擬によって得られて時刻である。この図16(a)の例では、再スケジューリング部136は、予定時刻「10時50分」を読み出している。
また、再スケジューリング部136は、基準点における飛行速度を読み出し、当該ポイントから変更開始点までの所要時間を算出する。そして、再スケジューリング部136は、変更開始点までの所要時間と、飛行模擬部135が算出した各点間の所要時間とを足し合わせて、元の個別トラジェクトリの始点までの所要時間を算出する。
【0074】
例えば、図16の例において、再スケジューリング部136は、点P81から点P82までの所要時間を「3分」と算出する。また、例えば、再スケジューリング部136は、飛行模擬部135が飛行模擬にて算出した、点P82から点P31までの所要時間として「2分」を取得し、点P31からP14までの所要時間として「10分」を取得する。
そして、再スケジューリング部136は、取得したこれらの時間を足し合わせて、ポイントP81から元の個別トラジェクトリの始点P14までの所要時間「15分」を取得する。
【0075】
すると、元の個別トラジェクトリの始点P14に設定されていた予定時刻「11時3分」では到達できないことになる。そこで、再スケジューリング部136は、点P14の予定時刻を点P81の予定時刻「10時50分」に、点P81からP14までの所要時間「15分」を加算した「11時5分」に、点P14の予定時刻を書き換える。
【0076】
この「11時5分」と元の「11時3分」との差分の「2分」だけ、以降の経路においても到達が遅れることになる。そこで、再スケジューリング部136は、以降の経路の点P13についても、予定時刻を「11時20分」から2分遅らせて「11時22分」とする。すなわち、再スケジューリング部136は、目的地の空港への到着予定時刻を11時22分に設定しなおす。同様に、再スケジューリング部136は、修正開始点P82以降の点のうち、通過予定時刻が設定されている各点について通過予定時刻を2分遅らせる修正を行い、点P82の通過予定時刻を10時53分とし、点P31の通過予定時刻を10時55分とする。この再スケジューリングによって得られる時刻の例を図16(b)に示す。
以上により、更新後の共有トラジェクトリにおける各点の予定時刻を到達可能な時刻に設定しなおすことが出来る。
【0077】
次に図17を参照してトラジェクトリ管理システム1の動作について説明する。
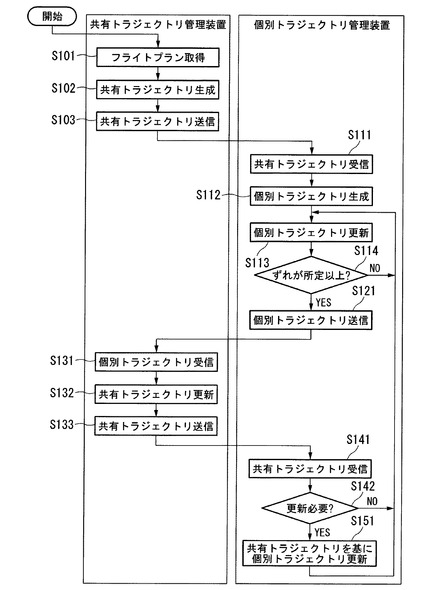
図17は、トラジェクトリ管理システム1が共有トラジェクトリおよび個別トラジェクトリを更新する処理手順を示すフローチャートである。トラジェクトリ管理システム1において通信部110がフライトプランを受信すると、トラジェクトリ管理システム1は同図の処理を開始する。
【0078】
まず、共有トラジェクトリ生成・更新部131は、通信部110が受信したフライトプランの出力を受けて、当該フライトプランを取得する(ステップS101)。
次に、共有トラジェクトリ生成・更新部131は、取得したフライトプランに基づいて共有トラジェクトリを生成する(ステップS102)。例えば、共有トラジェクトリ生成・更新部131は、フライトプランの項目を共有トラジェクトリの項目にコピーし、埋まらなかった項目について、例えば航空機性能情報に示されるデータを用いて埋めるなど、予め設定されているデフォルト処理に従って共有トラジェクトリの各項目にデータを登録する。あるいは、フライトプランに示されるデータに対して飛行模擬を行って、より精度の高い共有トラジェクトリを生成するようにしてもよい。
【0079】
そして、共有トラジェクトリ生成・更新部131は、生成した共有トラジェクトリを通信部110に出力し、通信部110は、当該共有トラジェクトリを、対象となっている航空機が通過予定の全エリアの個別トラジェクトリ管理装置500に送信する(ステップS103)。以下では、個別トラジェクトリ取得部331の例として、空港エリア個別トラジェクトリ管理装置200について説明する。航空路エリア個別トラジェクトリ管理装置300および洋上エリア個別トラジェクトリ管理装置400についても同様である。
通信部110から送信される共有トラジェクトリを通信部210が受信すると(ステップS111)、個別トラジェクトリ取得部231は、この共有トラジェクトリに基づいて個別トラジェクトリを生成する(ステップS112)。この個別トラジェクトリの生成は、個別トラジェクトリ取得部231が自動で行うようにしてもよいし、ユーザの操作入力に従って行うようにしてもよい。
【0080】
次に、個別トラジェクトリ取得部231は、必要に応じて個別トラジェクトリを更新する(ステップS113)。例えば、個別トラジェクトリ取得部231は、航空機の遅延情報を取得すると、当該遅延情報に従って個別トラジェクトリの各ポイントの予定時刻を更新する。また、個別トラジェクトリ取得部231は、気象状況の変化に応じて空港への進入方向を変更するなどの更新を行う。個別トラジェクトリ取得部231が、当該更新を自動で行うようにしてもよいし、ユーザの操作入力に従って行うようにしてもよい。
【0081】
そして、ずれ検出部232は、更新後の個別トラジェクトリと共有トラジェクトリとのずれの大きさを検出し、ずれが所定の大きさ以上か否かを判定する(ステップS114)。例えば、ずれ検出部232は、航空機の飛行経路の変更の有無や、同じポイントの通過予定時刻の差を検出し、飛行経路の変更がある場合や、通過予定時刻が所定の閾値時間(例えば5分)以上である場合に、ずれが所定の大きさ以上であると判定する。
【0082】
ずれか所定の大きさ未満であると判定した場合(ステップS114:NO)、ステップS113に戻る。
一方、ずれが所定の大きさ以上であると判定した場合(ステップS114:YES)、ずれ検出部232は、共有トラジェクトリ管理装置100に個別トラジェクトリを送信するように個別トラジェクトリ取得部231に指示し、個別トラジェクトリ取得部231は、当該指示に従って、通信部210を介して共有トラジェクトリ管理装置100に個別トラジェクトリを送信する(ステップS121)。
【0083】
そして、共有トラジェクトリ管理装置100では、通信部110が個別トラジェクトリを受信すると(ステップS131)、当該個別トラジェクトリを共有トラジェクトリ生成・更新部131に出力する。
そして、制御部130では、上述したように、接続判定部133が、個別トラジェクトリの端点が共有トラジェクトリの示す飛行経路に含まれるか否かを判定する。含まれないと判定した場合は、接続点決定部134が、接続を行う点を決定し、共有トラジェクトリ生成・更新部131が、個別トラジェクトリと共有トラジェクトリとを接合する。そして、飛行模擬部135が、接合経路に対する飛行模擬を行い、再スケジューリング部136が、飛行模擬の結果に従って再スケジューリングを行う。
これにより、制御部130は共有トラジェクトリを更新する(ステップS132)。
なお、接続判定部133が、個別トラジェクトリの端点が共有トラジェクトリの示す飛行経路に含まれると判定した場合は、そのまま個別トラジェクトリを共有トラジェクトリに接続し、個別トラジェクトリであった部分について、共通トラジェクトリにおける飛行予定時刻と個別トラジェクトリにおける飛行予定時刻とのずれに基づいて飛行予定時刻を更新することで、共有トラジェクトリを更新する。
【0084】
次に、共有トラジェクトリ生成・更新部131は、更新した共有トラジェクトリを、通信部110に出力し、通信部110は、当該共有トラジェクトリを、対象となっている航空機が通過予定の全エリアの個別トラジェクトリ管理装置500に送信する(ステップS133)。
通信部110から送信される共有トラジェクトリを通信部210が受信すると(ステップS141)、個別トラジェクトリ取得部231は、この共有トラジェクトリと個別トラジェクトリとのずれを検出して、共有トラジェクトリに基づいて個別トラジェクトリを更新する必要があるか否かを判定する(ステップS142)。
更新する必要があると判定した場合(ステップS142:NO)、個別トラジェクトリ取得部231は共有トラジェクトリに基づいて個別トラジェクトリを更新する(ステップS151)。個別トラジェクトリ取得部231が当該更新を自動で行うようにしてもよいし、ユーザの」操作入力に従って更新を行うようにしてもよい。
その後、ステップS113に戻る。
一方、ステップS142において、共有トラジェクトリに基づいて個別トラジェクトリを更新する必要がないと判定した場合(ステップS142:NO)、ステップS113に戻る。
トラジェクトリ管理システム1は、航空機が着陸してトラジェクトリの更新が不要となると、当該航空機に関して同図の処理を終了する。
【0085】
以上のように、共有トラジェクトリ管理装置100は、個別トラジェクトリに基づいて共有トラジェクトリを更新するので、航空機の軌道全体について、より精度の高い情報を得られる。すなわち、航空機が各エリア内を飛行する経路を共有トラジェクトリとして集約することにより、全体として最適な経路を共有することができるようになる。
そして、上述したように、この共有トラジェクトリに基づいて個別トラジェクトリを更新するなど、共有トラジェクトリの示す航空機の軌道全体についての情報を管制に反映させることによって、航空機の管制に際して、管制の引渡し先となるエリアの状況が、より適切に反映される。このため、効率的に管制の引渡しを行えるようになる。また、航空機にとっても、より短い航路を飛行できるなど、効率の良い経路を飛行できる可能性が高まる。
【0086】
例えば、着陸予定空港の空港エリアにおいて、空港エリア個別トラジェクトリ管理装置200が図8で説明したような個別トラジェクトリを生成した場合、図8で説明した接合処理等のように、空港エリア個別トラジェクトリ管理装置200が生成した個別トラジェクトリの部分よりも手前の部分まで、すなわち、航空路エリアの部分まで共有トラジェクトリが更新される。航空路エリアにおいて、この共有トラジェクトリを個別トラジェクトリに反映させるなど、共有トラジェクトリを管制に反映させることで、管制の引渡し先となる空港エリアの状況を適切に反映させて、当該空港エリア側が希望するポイントで管制を引き渡すことができる。
【0087】
また、通信部110が接合処理を行うことで、個別トラジェクトリの端点が共有トラジェクトリ上に無い場合にも、個別トラジェクトリに基づいて共有トラジェクトリを更新することができる。
【0088】
また、空港エリア個別トラジェクトリ管理装置200や航空路エリア個別トラジェクトリ管理装置300や洋上エリア個別トラジェクトリ管理装置400において、ずれ検出部232ずれ検出部332やずれ検出部432が、個別トラジェクトリと共有トラジェクトリとの間のずれの大きさを検出し、所定の大きさ以上のずれを検出した場合に個別トラジェクトリを送信する。従って、個別トラジェクトリと共有トラジェクトリとの間のずれが少なく、個別トラジェクトリの内容を共有トラジェクトリに反映させる必要性が低い場合は、個別トラジェクトリの送信を抑制して通信付加を低減させることができる。
【0089】
なお、通信部110が送信する共有トラジェクトリの詳細度は、個別トラジェクトリの詳細度と同様であってもよいし、あるいは、個別トラジェクトリの詳細度よりも低くてもよい。通信部110が、詳細度のより低い共有トラジェクトを送信するようにすることで、通信負荷を低減させることができる。
【0090】
また、共有トラジェクトリ管理装置100が、気象データや傾向データなど、管制対象のエリアを分割したメッシュの各々の特性情報に基づいて、共有トラジェクトリを生成することで、より精度の高い共有トラジェクトリを生成することができる。
【0091】
なお、トラジェクトリ管理システム1の全部または一部の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより各部の処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、コンパクトディスク等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0092】
以上、この発明の実施形態を図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0093】
1 トラジェクトリ管理システム
100 共有トラジェクトリ管理装置
110、210、310、410 通信部
120、220、320、420 記憶部
130、230、330、430 制御部
131 共有トラジェクトリ生成・更新部
132 データ管理部
133 接続判定部
134 接続点決定部
135 飛行模擬部
136 再スケジューリング部
200 空港エリア個別トラジェクトリ管理装置
231、331、431 個別トラジェクトリ取得部
232、332、432 ずれ検出部
300 航空路エリア個別トラジェクトリ管理装置
400 洋上エリア個別トラジェクトリ管理装置
900 ネットワーク
【特許請求の範囲】
【請求項1】
複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムであって、
前記個別トラジェクトリ管理装置は、
個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、
前記個別トラジェクトリ取得部が取得する前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、
を具備し、
前記共有トラジェクトリ管理装置は、
前記個別トラジェクトリ送信部の送信する前記個別トラジェクトリを受信する個別トラジェクトリ受信部と、
複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、
を具備することを特徴とするトラジェクトリ管理システム。
【請求項2】
前記共有トラジェクトリ管理装置は、
前記共有トラジェクトリに軌道を示される航空機の性能情報を取得する性能情報取得部と、
前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれるか否かを判定する接続判定部と、
前記接続判定部が、前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれないと判定すると、前記共有トラジェクトリの示す軌道に含まれる点、かつ、前記共有トラジェクトリの示す経路を飛行して当該点に到達した前記性能情報に示される性能を有する航空機が、前記個別トラジェクトリの始点に到達して前記個別トラジェクトリの示す飛行経路を航行可能な点を検出する接続点決定部と、
前記接続点決定部が検出する前記点と前記個別トラジェクトリの始点とを結ぶ接合経路における飛行を模擬して、前記航空機が前記接合経路を通過する際の所要時間を算出する飛行模擬部と、
前記飛行模擬部が算出する前記所要時間に基づいて、前記航空機の前記個別トラジェクトリにおける飛行予定時刻を算出する再スケジューリング部と、
を具備し、
前記共有トラジェクトリ更新部は、前記共有トラジェクトリにおける、前記接続点決定部の検出した点以降の軌道を、前記接合経路および前記個別トラジェクトリの示す軌道で置き換え、
前記際スケジューリング部は、前記共有トラジェクトリ更新部が前記置き換えを行った共有トラジェクトリのうち、前記個別トラジェクトリの示す軌道で置き換えられた部分における飛行予定時刻を、前記算出した飛行要諦時刻に更新することで、前記共有トラジェクトリを更新する、ことを特徴とする請求項1に記載のトラジェクトリ管理システム。
【請求項3】
前記共有トラジェクトリ管理装置は、
更新した共有トラジェクトリを前記個別トラジェクトリ管理装置に送信する共有トラジェクトリ送信部を具備し、
前記個別トラジェクトリ管理装置は、
前記共有トラジェクトリ送信部の送信する前記共有トラジェクトリを受信する共有トラジェクトリ受信部を具備し、
前記個別トラジェクトリ取得部は、前記共有トラジェクトリ受信部の受信する前記共有トラジェクトリの軌道に基づいて更新された個別トラジェクトリを取得する、ことを特徴とする請求項1または請求項2に記載のトラジェクトリ管理システム。
【請求項4】
前記個別トラジェクトリ管理装置は、
前記個別トラジェクトリと前記共有トラジェクトリとの間のずれの大きさを検出するずれ検出部を具備し、
前記個別トラジェクトリ送信部は、前記ずれ検出部が所定の大きさ以上のずれを検出すると、前記個別トラジェクトリを前記共有トラジェクトリ管理装置に送信する、ことを特徴とする請求項1から3のいずれか一項に記載のトラジェクトリ管理システム。
【請求項5】
前記共有トラジェクトリ管理装置の前記共有トラジェクトリ送信部は、前記個別トラジェクトリ管理装置の取得する前記個別トラジェクトリよりも詳細度の低い前記共有トラジェクトリを送信する、ことを特徴とする請求項3に記載のトラジェクトリ管理システム。
【請求項6】
管制対象のエリアを分割したメッシュの各々の特性情報に基づいて、航空機の軌道を示すトラジェクトリを生成する、ことを特徴とするトラジェクトリ管理システム。
【請求項7】
複数の所定エリアの各々における、同一の航空機の軌道を示す個別トラジェクトリを受信する個別トラジェクトリ受信部と、
前記複数の所定エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、
を具備することを特徴とする共有トラジェクトリ管理装置。
【請求項8】
所定エリアにおける航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、
前記個別トラジェクトリ取得部が取得する個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、
を具備することを特徴とする個別トラジェクトリ管理装置。
【請求項9】
複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムのトラジェクトリ更新方法であって、
前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、
前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、
前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、
複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、
を具備することを特徴とするトラジェクトリ更新方法。
【請求項10】
複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムを制御するプログラムであって、
前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、
前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、
前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、
複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、
を具備することを特徴とする、コンピュータにて実行可能なプログラム。
【請求項1】
複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムであって、
前記個別トラジェクトリ管理装置は、
個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、
前記個別トラジェクトリ取得部が取得する前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、
を具備し、
前記共有トラジェクトリ管理装置は、
前記個別トラジェクトリ送信部の送信する前記個別トラジェクトリを受信する個別トラジェクトリ受信部と、
複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、
を具備することを特徴とするトラジェクトリ管理システム。
【請求項2】
前記共有トラジェクトリ管理装置は、
前記共有トラジェクトリに軌道を示される航空機の性能情報を取得する性能情報取得部と、
前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれるか否かを判定する接続判定部と、
前記接続判定部が、前記個別トラジェクトリの始点が前記共有トラジェクトリの示す飛行経路に含まれないと判定すると、前記共有トラジェクトリの示す軌道に含まれる点、かつ、前記共有トラジェクトリの示す経路を飛行して当該点に到達した前記性能情報に示される性能を有する航空機が、前記個別トラジェクトリの始点に到達して前記個別トラジェクトリの示す飛行経路を航行可能な点を検出する接続点決定部と、
前記接続点決定部が検出する前記点と前記個別トラジェクトリの始点とを結ぶ接合経路における飛行を模擬して、前記航空機が前記接合経路を通過する際の所要時間を算出する飛行模擬部と、
前記飛行模擬部が算出する前記所要時間に基づいて、前記航空機の前記個別トラジェクトリにおける飛行予定時刻を算出する再スケジューリング部と、
を具備し、
前記共有トラジェクトリ更新部は、前記共有トラジェクトリにおける、前記接続点決定部の検出した点以降の軌道を、前記接合経路および前記個別トラジェクトリの示す軌道で置き換え、
前記際スケジューリング部は、前記共有トラジェクトリ更新部が前記置き換えを行った共有トラジェクトリのうち、前記個別トラジェクトリの示す軌道で置き換えられた部分における飛行予定時刻を、前記算出した飛行要諦時刻に更新することで、前記共有トラジェクトリを更新する、ことを特徴とする請求項1に記載のトラジェクトリ管理システム。
【請求項3】
前記共有トラジェクトリ管理装置は、
更新した共有トラジェクトリを前記個別トラジェクトリ管理装置に送信する共有トラジェクトリ送信部を具備し、
前記個別トラジェクトリ管理装置は、
前記共有トラジェクトリ送信部の送信する前記共有トラジェクトリを受信する共有トラジェクトリ受信部を具備し、
前記個別トラジェクトリ取得部は、前記共有トラジェクトリ受信部の受信する前記共有トラジェクトリの軌道に基づいて更新された個別トラジェクトリを取得する、ことを特徴とする請求項1または請求項2に記載のトラジェクトリ管理システム。
【請求項4】
前記個別トラジェクトリ管理装置は、
前記個別トラジェクトリと前記共有トラジェクトリとの間のずれの大きさを検出するずれ検出部を具備し、
前記個別トラジェクトリ送信部は、前記ずれ検出部が所定の大きさ以上のずれを検出すると、前記個別トラジェクトリを前記共有トラジェクトリ管理装置に送信する、ことを特徴とする請求項1から3のいずれか一項に記載のトラジェクトリ管理システム。
【請求項5】
前記共有トラジェクトリ管理装置の前記共有トラジェクトリ送信部は、前記個別トラジェクトリ管理装置の取得する前記個別トラジェクトリよりも詳細度の低い前記共有トラジェクトリを送信する、ことを特徴とする請求項3に記載のトラジェクトリ管理システム。
【請求項6】
管制対象のエリアを分割したメッシュの各々の特性情報に基づいて、航空機の軌道を示すトラジェクトリを生成する、ことを特徴とするトラジェクトリ管理システム。
【請求項7】
複数の所定エリアの各々における、同一の航空機の軌道を示す個別トラジェクトリを受信する個別トラジェクトリ受信部と、
前記複数の所定エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する個別トラジェクトリに基づいて更新する共有トラジェクトリ更新部と、
を具備することを特徴とする共有トラジェクトリ管理装置。
【請求項8】
所定エリアにおける航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得部と、
前記個別トラジェクトリ取得部が取得する個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信部と、
を具備することを特徴とする個別トラジェクトリ管理装置。
【請求項9】
複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムのトラジェクトリ更新方法であって、
前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、
前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、
前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、
複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、
を具備することを特徴とするトラジェクトリ更新方法。
【請求項10】
複数の個別トラジェクトリ管理装置と、共有トラジェクトリ管理装置と、を具備するトラジェクトリ管理システムを制御するプログラムであって、
前記個別トラジェクトリ管理装置が、個別トラジェクトリ管理装置毎に設定される個別エリアにおける、同一の航空機の軌道を示す個別トラジェクトリを取得する個別トラジェクトリ取得ステップと、
前記個別トラジェクトリ管理装置が、前記個別トラジェクトリ取得ステップにて取得される前記個別トラジェクトリを、前記共有トラジェクトリ管理装置に送信する個別トラジェクトリ送信ステップと、
前記共有トラジェクトリ管理装置が、前記個別トラジェクトリ送信ステップにて送信される前記個別トラジェクトリを受信する個別トラジェクトリ受信ステップと、
複数の前記個別エリアを包含する全体エリアにおける、前記個別トラジェクトリに軌道を示される航空機と同一の航空機の軌道を示す共有トラジェクトリを、前記個別トラジェクトリ受信部の受信する前記個別トラジェクトリに基づいて更新する共有トラジェクトリ更新ステップと、
を具備することを特徴とする、コンピュータにて実行可能なプログラム。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−16002(P2013−16002A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−148080(P2011−148080)
【出願日】平成23年7月4日(2011.7.4)
【出願人】(000102728)株式会社エヌ・ティ・ティ・データ (438)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月4日(2011.7.4)
【出願人】(000102728)株式会社エヌ・ティ・ティ・データ (438)
【Fターム(参考)】
[ Back to top ]