
トリガされたロケーションサービス
トリガイベントに対して検出するために、端末に対する少なくとも1つのロケーション関連測定値を取得し、使用することができる。等距離トリガサービスでは、端末が進行した距離が予め規定された距離を超えた場合に、トリガイベントを宣言する。相対的な端末対端末トリガサービスでは、端末が、基準端末により規定されている、移動する地理的なターゲットエリアの中または外にあるか、あるいは、このエリアに入るかまたは離れる場合に、トリガイベントを宣言する。速度トリガサービスでは、端末の最高速度が予め規定された速度を超えた場合に、トリガイベントを宣言する。時間−距離−速度の組み合わせのトリガサービスでは、端末が進行した距離と、端末の速度と、最後の報告以降の時間とに基づいて、トリガイベントを宣言する。すべてのサービスに対して、トリガイベントが起こった場合に報告を送る。
【発明の詳細な説明】
【米国特許法第119条の下での優先権の主張】
【0001】
本特許出願は、“トリガされたロケーションサービス”と題し、2009年2月9日に出願され、その譲受人に譲渡され、参照によりここに明示的に組み込まれている、米国仮特許出願シリアル番号第61/151,089号に対する優先権を主張する。
【背景】
【0002】
I.分野
本開示は、一般的に通信に関し、さらに詳細には、ロケーションサービスをサポートするための技術に関する。
【0003】
II.背景
ワイヤレスネットワーク中の端末の位置を知ることが望ましいことが多く、時に、必要である。用語“ロケーション”と“ポジション”とは同義であり、ここでは、区別なく使用する。例えば、ユーザは、端末を利用して、ウェブサイトをブラウズすることができ、ロケーション依存コンテンツをクリックすることができる。その後、ユーザに対して適切なコンテンツを提供するために、端末のロケーションを決定し、使用してもよい。端末のロケーションを知っていることが有用である、または、必要である他の多くのシナリオがある。
【0004】
端末に対するロケーション情報(例えば、ロケーション推定)を取得して、クライアントエンティティにロケーション情報を送るために、典型的に、(通話フローまたは手順とも呼ぶことがある)メッセージフローが実行される。典型的に、1つ以上のネットワークエンティティと、端末と、クライアントエンティティとの間で、メッセージフローに対するさまざまなメッセージが交換される。これらのメッセージは、端末に対するポジショニングを実行するために、および/または、クライアントエンティティにロケーション情報を配信するために、関係する情報が確実に各エンティティに提供されるようにし、あるいは、各エンティティが別のエンティティからこの情報を確実に取得できるようにする。しかしながら、これらのメッセージは、さまざまなネットワークエンティティにおけるトラフィックを増加させる。付加的なトラフィックは、クライアントエンティティにロケーション情報を周期的に提供するロケーションサービスに対して、特に大きいかもしれない。メッセージはまた、クライアントエンティティにロケーション情報を送るための応答時間を延ばすかもしれない。
【概要】
【0005】
ここでは、トリガされたロケーションサービスをサポートするための技術を説明する。トリガされたロケーションサービスは、トリガイベントが起こったときにはいつでも、ロケーション情報を持つ報告を送ることができるサービスである。異なるトリガされたロケーションサービスに対して、異なる方法でトリガイベントを規定してもよい。
【0006】
トリガされたロケーションサービスをサポートする1つの設計では、端末に対する少なくとも1つのロケーション関連測定値を取得してもよい。各ロケーション関連測定値は、端末が進行した距離に対するもの、または、端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定してもよい。トリガイベントが起こっていた場合に、報告を送ってもよい。
【0007】
1つの設計では、等距離トリガサービスに対しては、少なくとも1つのロケーション測定値は、端末が進行した距離に対するものであってもよく、これは、下記で説明するようにさまざまな方法で決定することができる。端末が進行した距離に基づいて、トリガイベントが起こっているか否かを決定してもよい。例えば、端末が進行した距離が、予め規定された距離を超えている場合に、トリガイベントを宣言してもよい。
【0008】
別の設計では、相対的な端末対端末トリガサービスに対しては、少なくとも1つのロケーション関連測定値は、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。基準端末のロケーションに基づいて、移動する地理的なターゲットエリアを決定してもよい。端末のロケーションが、移動する地理的なターゲットエリアに関する基準に一致する場合に、トリガイベントを宣言してもよい。基準は、移動する地理的なターゲットエリアの内にあるか、移動する地理的なターゲットエリアの外にあるか、移動する地理的なターゲットエリアに入るか、または、移動する地理的なターゲットエリアを離れるかであってもよい。
【0009】
さらに別の設計では、速度トリガサービスに対しては、少なくとも1つのロケーション関連測定値は、端末の速度に対するものであってもよい。端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定してもよい。例えば、端末の速度を周期的に決定してもよく、最後のトリガイベント以降の端末の最高速度を決定してもよい。最高速度が、予め規定された速度を超えている場合に、トリガイベントを宣言してもよい。
【0010】
さらに別の設計では、時間−距離−速度(T−D−V)の組み合わせのトリガサービスに対しては、少なくとも1つのロケーション関連測定値は、端末が進行した距離に対するもの、および、端末の速度に対するものであってもよい。端末が進行した距離や、端末の速度や、および/または、最後のトリガイベント以降に経過した時間に基づいて、トリガイベントが起こっているか否かを決定してもよい。例えば、複数の式を決定してもよい。各式は、予め規定された距離に関する端末が進行した距離に対するもの、または、予め規定された速度に関する端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものであってもよい。複数の式の関数に基づいて、トリガイベントが起こっているか否かを決定してもよい。
【0011】
さらに別の設計では、端末対端末速度サービスに対しては、例えば、ロケーションセンターに対して、第1の端末が、第2の端末の速度に対する要求を送ってもよい。第1の端末は、その後、1回かまたは複数回かのいずれか、(例えば、ロケーションセンターから、または、第2の端末から、)要求に応答した第2の端末の速度を受信してもよい。
【0012】
他のトリガされたロケーションサービスを下記で説明する。本開示のさまざまな態様および特徴もまた、下記でさらに詳細に説明する。
【図面の簡単な説明】
【0013】
【図1】図1は、ロケーションサービスをサポートする例示的な配置である。
【図2】図2は、等距離トリガサービスに対するメッセージフローを示している。
【図3】図3は、等距離トリガサービスに対するメッセージフローを示している。
【図4】図4は、移動する地理的なターゲットエリアを示している。
【図5】図5は、相対的な端末対端末トリガサービスに対するメッセージフローを示している。
【図6】図6は、相対的な端末対端末トリガサービスに対するメッセージフローを示している。
【図7】図7は、速度トリガサービスに対するメッセージフローを示している。
【図8】図8は、T−D−Vの組み合わせのトリガサービスに対するメッセージフローを示している。
【図9】図9は、端末対端末の速度サービスに対するメッセージを示している。
【図10】図10は、トリガされたロケーションサービスをサポートするためのプロセスを示している。
【図11】図11は、端末対端末の速度サービスをサポートするためのプロセスを示している。
【図12】図12は、端末と、ワイヤレスネットワークと、ロケーションサーバとのブロックダイヤグラムを示している。
【詳細な説明】
【0014】
ここでは、トリガされたロケーションサービスをサポートするための技術を説明する。さまざまなワイヤレスネットワークと通信する端末に対して、これらの技術を使用してもよい。用語“ネットワーク”および“システム”は、区別なく使用することが多い。例えば、“第3世代パートナーシッププロジェクト”(3GPP)という名の組織により規定されているワイヤレスネットワークに対して、および、“第3世代パートナーシッププロジェクト2”(3GPP2)という名の組織により規定されているワイヤレスネットワークに対して、これらの技術を使用してもよい。
【0015】
ユーザプレーンロケーションアーキテクチャ/ソリューションと、制御プレーンロケーションアーキテクチャ/ソリューションとに対しても、これらの技術を使用してもよい。ユーザプレーンロケーションアーキテクチャは、ユーザプレーンを通して、ロケーションサービスに対するメッセージを送るロケーションアーキテクチャである。ユーザプレーンは、より高次のレイヤアプリケーションにシグナリングおよびデータを伝えて、ユーザプレーンベアラを用いるメカニズムであり、典型的に、ユーザデータグラムプロトコル(UDP)、送信制御プロトコル(TCP)、および、インターネットプロトコル(IP)のような標準的なプロトコルで実現されている。制御プレーンロケーションアーキテクチャは、制御プレーンを介して、ロケーションサービスにメッセージを送るロケーションアーキテクチャである。制御プレーンは、より高次のレイヤアプリケーションにシグナリングを伝えるメカニズムであり、典型的に、ネットワーク特定プロトコルと、インターフェースと、シグナリングメッセージとで実現されている。ロケーションサービスをサポートするメッセージは、制御プレーンアーキテクチャでは、シグナリングの一部として伝えられ、ユーザプレーンアーキテクチャでは、(ネットワークの見地から)データの一部として伝えられる。しかしながら、メッセージのコンテンツは、ユーザプレーンロケーションアーキテクチャと制御プレーンのロケーションアーキテクチャの双方において、同じであるか、または、類似していてもよい。
【0016】
明確さのために、オープン移動体連合(OMA)からのセキュアユーザプレーンロケーション(SUPL)に対して、技術のある態様を下記で説明する。SUPLは、3GPP、3GPP2、および、WLANのネットワークに適用可能であり、OMAからの公然と入手可能な文書中に記述されている。明確さのために、以下の説明の大部分では、SUPL専門用語を使用する。
【0017】
図1は、ロケーションサービスをサポートする例示的な配置を示している。端末110、端末112、および、端末114は、ワイヤレスネットワーク120と通信して、通信サービスを取得してもよい。端末は、静的なものまたは移動性のものであってもよく、移動局(MS)、ユーザ機器(UE)、アクセス端末(AT)、加入者局、局等としても呼ぶことがある。端末は、セルラ電話機、パーソナルデジタルアシスタント(PDA)、ハンドヘルドデバイス、ワイヤレスデバイス、ラップトップコンピュータ、ワイヤレスモデム、コードレス電話機、遠隔測定デバイス、追跡デバイス等であってもよい。端末は、SUPLでは、SUPLイネーブル端末(SET)として呼ぶことがある。用語“端末”および“SET”は、ここでは、区別なく使用する。
【0018】
ワイヤレスネットワーク120は、ワイヤレスワイドエリアネットワーク(WWAN)や、ワイヤレスメトロポリタンエリアネットワーク(WMAN)や、ワイヤレスローカルエリアネットワーク(WLAN)等であってもよい。WWANは、コード分割多元接続(CDMA)1Xネットワークや、ワイドバンドCDMA(WCDMA)ネットワークや、グローバルシステムフォーモバイルコミュニケーション(GSM(登録商標))ネットワークや、ロングタームエボリューション(LTE)ネットワーク等であってもよい。WMANは、通常、WiMAXとして呼ばれるIEEE802.16を実現してもよい。WLANは、(通常、WiFi(登録商標)として呼ばれる)IEEE802.11や、ハイパーLAN等を実現してもよい。
【0019】
SETは、衛星150のような衛星からの信号を受信して測定し、衛星に対する擬似距離測定値を取得してもよい。衛星は、米国のグローバルポジショニングシステム(GPS)や、欧州のGalileoシステムや、ロシアのGLONASSシステムや、または、他の何らかの衛星ポジショニングシステム(SPS)の一部であってもよく、あるいは、これらのシステムの組み合わせであってもよい。SETに対するロケーション推定を導出するために、衛星の擬似距離測定値と、衛星の既知のロケーションとを使用してもよい。ロケーション推定は、ポジション推定、ポジション確定等としても呼ぶことがある。SETはまた、ワイヤレスネットワーク120内の基地局から信号を受信して測定し、基地局に対するタイミングおよび/または信号強度測定値を取得してもよい。SETに対するロケーション推定を導出するために、基地局のタイミングおよび/または信号強度測定値と、基地局の既知のロケーションとを使用してもよい。一般に、衛星、基地局、擬似衛星、および/または、他の送信機に対する測定に基づいて、ならびに、ポジショニング方法のうちの1つまたはポジショニング方法を組み合わせたものを使用して、ロケーション推定を導出できる。
【0020】
ホームSUPLロケーションプラットフォーム(H−SLP)130は、SETに対するロケーションサービスをサポートするために、SETと通信してもよい。ロケーションサービスは、ロケーション情報に基づいている、または、ロケーション情報に関連している、何らかのサービスを含んでいてもよい。ロケーションサービスは、SETに対する地理的なロケーション推定を、または、SETに対するシビルロケーション推定を決定するためのプロセスである、ポジショニングを含んでいてもよい。ポジショニングは、(i)緯度、経度、および、場合によっては高度の座標、ならびに、地理的なロケーション推定に対する不確実性を提供するか、あるいは、(ii)シビルロケーション推定に対するストリートアドレスを提供してもよい。ポジショニングはまた、速度および/または他の情報を提供してもよい。H−SLP130は、SUPLロケーションセンター(SLC)132と、SUPLポジショニングセンター(SPC)134とを含んでいてもよい。SLC132は、ロケーションサービスをサポートし、SUPLの動作を調整し、ユーザプレーンベアラを通してSETと対話してもよい。SLC132は、プライバシー、入会、セキュリティ、ローミングサポート、課金/請求、サービス管理、ロケーション算出等に対する機能を実行してもよい。SPC134は、SETに対するポジショニングと、SETへの支援データの配信とをサポートしてもよく、また、ロケーション算出のために使用されるメッセージおよび手順を担ってもよい。SPC134は、セキュリティ、支援データ配信、参照検索、ロケーション算出等に対する機能を実行してもよい。
【0021】
SUPLエージェント140は、ロケーションクライアントであってもよく、(例えば、直接、または、1つ以上のネットワークを通して、)H−SLP130と通信して、ターゲットSETに対するロケーション情報を取得してもよい。ターゲットSETは、そのSETに対するロケーション情報が、SUPLエージェントにより探されているSETである。ロケーション情報は、ロケーション推定を、ならびに/あるいは、ロケーションまたは速度に関連する何らかの情報を含んでもよい。SET120はまた、SET内に存在しているSUPLエージェントを有してもよい。例えば、SET114は、SET内に、SUPLエージェント144を有している。
【0022】
SETは、ポジション決定が可能であってもよく、ネットワークからの支援により、または、ネットワークからの支援なしに、そのロケーションを決定することができる。SETベースモードに対しては、場合によってはSPCからの支援データにより、SETのロケーションをSETにより決定することができる。SET支援モードに対しては、SETからの支援(例えば、測定値)により、SETのロケーションをSPCにより決定することができる。SETは、自律GPS、支援GPS(A−GPS)、アドバンストフォワードリンクトライラテレーション(A−FLT)、強化観測時間差(EOTD)、観測到達時間差(OTDOA)、ハイブリッド等のような、1つ以上のポジショニング方法をサポートしていてもよい。簡潔さのために、用語“GPS”は、GPS、Galileo、GLONASS等のような、何らかのSPSのことを指すことができる。自律GPS方法およびA−GPS方法は、衛星測定値のみに基づいて、SETに対するロケーション推定を提供することができ、高い精度を有している。ハイブリッド方法は、衛星測定値と基地局測定値の双方に基づいて、ロケーション推定を提供することができ、高い精度および高い信頼性を有している。A−FLT方法、EOTD方法、および、OTDOA方法は、SETにより行われた、基地局のタイミング測定に基づいて、ロケーション推定を提供することができ、良好な精度を有している。SETは、他のポジショニング方法もサポートすることができる。
【0023】
ある態様において、さまざまなトリガされたロケーションサービスがサポートされていてもよい。トリガされたロケーションサービスは、トリガイベントが起こったときにはいつでも、ターゲットSETに対するロケーション情報をSUPLエージェントに対して提供することができる。異なるトリガされたロケーションサービスは、異なるタイプのトリガに関係付けられていてもよい。表1は、いくつかのトリガされたロケーションサービスをリストアップしており、各トリガされたロケーションサービスの短い説明を提供している。他のタイプのトリガに基づいて、他のトリガされたロケーションサービスもサポートすることができる。表1中のトリガされたロケーションサービスを、下記でさらに詳細に説明する。
【表1】

【0024】
等距離トリガサービスは、ターゲットSETのロケーションを周期的に決定し、ターゲットSETが、予め規定された距離を移動したときに、ロケーション情報を報告してもよい。距離は、(i)SETの現在のロケーションと、距離監視が開始したときのその最初のロケーションとの間の直線距離、または、(ii)その最初のロケーションを離れて以来、SETがたどった、典型的に非線形のパスの全距離、または、(iii)他の何らかの方法で規定されている距離のことを指してもよい。SUPLエージェントは、等距離トリガサービスを開始し、ターゲットSETを識別し、適用可能なパラメータを提供してもよい。
【0025】
等距離トリガサービスを使用して、移動体端末(例えば、SET110)を周期的に監視し、端末が、予め規定された距離を進行したときにはいつでも、第三者(例えば、SUPLエージェント140)に通知を送ってもよい。例えば、運送会社のオペレーションセンターは、16キロメートル(10マイル)進行したごとの後に、その車隊中のトラックのロケーションを知りたいと思っているかもしれない。第三者(例えば、オペレーションセンター)は、ロケーションサーバ(例えば、H−SLP130)にロケーション要求を送ってもよい。(ポジション決定可能であってもよい)端末と協調しているロケーションサーバは、予め規定された距離だけ端末が移動したか否かの検出が可能であるポジション決定手順を開始してもよい。このイベントが起こったときにはいつでも、ロケーションサーバは、ロケーションクライアントに通知してもよい。
【0026】
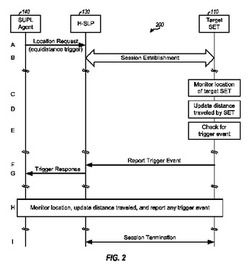
図2は、等距離トリガサービスに対するメッセージフロー200の設計を示している。SUPLエージェント140は、ターゲットSET110が、最後に報告されたロケーションから、予め規定された距離を移動したときにはいつでも、知ることを望んでいるかもしれず、等距離トリガの表示を持つロケーション要求をH−SLP130に対して送ってもよい(ステップA)。H−SLP130は、その後、ターゲットSETと通信して、等距離トリガセッションを確立してもよい(ステップB)。
【0027】
SETベースモードまたはSET支援モードを使用して、SET110のロケーションを周期的に決定してもよい。SETベースモードに対しては、SET110は、自律的に測定を行い、そのロケーションを決定する。SET110は、必要なときにはいつでも、H−SLP130と通信して、支援データを取得することができる。SET支援モードに対しては、SET110は、H−SLP130とのポジショニングセッションに携わってもよく、H−SLP130は、SET110からの測定値に基づいて、ロケーション推定を算出してもよい。一般に、SET110のロケーションは、SET110のみにより、H−SLP130からの支援とともにSET110により、SET110からの支援とともにH−SLP130による等して、決定してもよい。さらに、トリガ条件の評価は、SET110またはH−SLP130のいずれかにより実行することができる。
【0028】
等距離トリガセッションの開始時にSET110のロケーションを決定して、最初のロケーションとして使用してもよい。等距離トリガセッションの間に、SET110のロケーションを周期的に決定することもできる。1つの設計では、X秒ごとに、SET110のロケーションを決定してもよく、ここで、Xは、何らかの適切な値であってもよく、トリガパラメータにより特定されていてもよい。別の設計では、可能な限り頻繁に、SET110のロケーションを決定してもよい。さらに別の設計では、SET110の推定速度と、予め規定された距離とに基づいて、SETのロケーションを把握し、時に、決定してもよい。したがって、より速い速度、および/または、より短い予め規定された距離に対しては、より短い間隔で、SET110のロケーションを決定してもよく、逆もまた同じである。さらに別の設計では、SET110の動きを検出することができるセンサーに基づいて、SET110のロケーションを決定してもよい。例えば、SET110が移動している間にSET110のロケーションを決定し、SET110が静止している間には中断してもよい。SET110のロケーションはまた、線形加速を検出して取得するセンサーや、方向の変化を検出して取得するセンサー等のような、センサーを使用して、以前のロケーションに関して決定してもよい。SET110のロケーションはまた、他の方法で周期的に決定してもよい。
【0029】
SET110のロケーションを決定してもよく(ステップC)、SETが進行した距離を更新してもよい(ステップD)。進行した距離は、さまざまな方法で決定することができる。1つの設計では、進行した距離は、SET110に対する、最後の報告以降の連続するロケーション間の増分距離を累積することにより取得した、総距離であってもよい。この設計では、SET110は、(i)その現在のロケーションと、最後のロケーションとの間の増分距離を決定し、(ii)最後のロケーションに対して累積された距離と、この増分距離とを合計して、現在のロケーションに対する累積された距離を取得してもよい。別の設計では、進行した距離は、現在のロケーションと、最後の報告のロケーションとの間の距離であってもよく、最後の報告のロケーションは、報告が何ら送られていない場合には、最初のロケーションであるかもしれない。さらに別の設計では、進行した距離は、例えば、特定のルートに沿った距離であってもよく、例えば、最初のロケーションから目的地のロケーションまでの通った道筋に沿った距離、または、より複雑なルートに沿った距離であってもよい。進行した距離はまた、他の方法で決定してもよい。
【0030】
1つの設計では、SET110が、トリガイベントをチェックして、報告を開始してもよい。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行するために、および、報告を開始するために、何らかの適切なエンティティが指定されている。指定されたエンティティには、SET110のロケーション、トリガパラメータ、および/または、他の関係する情報が提供される。明確さのために、下記の説明の大部分では、SET110が、指定されたエンティティであると仮定する。
【0031】
SET110は、SET110が進行した距離と、予め規定された距離とに基づいて、トリガイベントが起こっているか否かをチェックしてもよい(ステップE)。進行した距離が、予め規定された距離を超えている場合に、トリガイベントが起こる。このケースでは、SET110は、トリガイベントが起こったことをH−SLP130に報告してもよい(ステップF)。報告は、SET110の現在のロケーションや、SET110が進行した距離や、および/または、他の情報も含んでいてもよい。その後、H−SLP130は、トリガイベントが起こったことをSUPLエージェント140に知らせるために、トリガ応答を送ってもよい(ステップG)。応答は、SET110からのトリガ報告中に提供されている情報のうちのいくつかまたはすべてを含んでいてもよい。トリガイベントが起こっていない場合には、ステップFとステップGはスキップしてもよい。
【0032】
ステップCないしステップGは、1つの処理サイクルに対するものであってもよい。同様の方法で、付加的な処理サイクルを実行してもよい(ステップH)。各処理サイクルは、SET110の現在のロケーションを決定するためのステップと、SET110が進行した距離を決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、SET110によるトリガイベント報告と、H−SLP130によるトリガ応答とを開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したときや、予め規定された最後の通過点に達したとき等に、等距離トリガセッションの終わりに達する。等距離トリガセッションの終わりに達したときに、H−SLP130とSET110は、セッションを終了してもよい(ステップI)。
【0033】
図3は、SUPLメッセージを使用する、等距離トリガサービスに対するメッセージフロー300の設計を示している。SUPLエージェント140は、SET110が、SET110の最後に報告されたロケーションから特定の距離を移動したときにはいつでも、知ることを望んでいるかもしれない。SUPLエージェント140は、移動体ロケーションプロトコルトリガされたロケーション応答要求(MLP TLRR)メッセージをH−SLP130に対して送ってもよく、H−SLP130は、SUPLエージェント140が関係付けられているH−SLPであってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント140に対するクライアント識別子(ID)(クライアント−id)や、ターゲットSET110に対する移動局識別子(ms−id)や、等距離トリガサービスが要求されているという表示や、トリガパラメータ(例えば、予め規定された距離、開始時間、停止時間等)等を含んでいてもよい。トリガパラメータを使用して、ターゲットSET110による報告に対するトリガイベントを決定してもよい。
【0034】
H−SLP130は、SUPLエージェント140を認証し、クライアントIDに基づいて、要求されたロケーションサービスに対してSUPLエージェントが認可されているかどうかをチェックしてもよい。H−SLP130はまた、移動局IDに基づいて、SUPLエージェント140に対する加入者プライバシーを適用してもよい。プライバシーチェックに対しては、SET110に対するロケーション情報を要求することが、SUPLエージェント140に、または、このタイプのSUPLエージェントに許可されているかどうかを、ならびに、SET110にこの要求が通知される必要があり、この要求を受諾または拒絶することがSET110に許容されているか否かを、H−SLP130が検証してもよい。H−SLP130は、プライバシーを保証するために、SET110のユーザの承諾によってのみ、等距離トリガサービスを実行することができる。等距離トリガサービスはまた、SETユーザのプライバシー設定の修正を動的に考慮してもよい。
【0035】
その後、H−SLP130は、SET110をルックアップし、SET110が現在ローミングしていることを検証し、また、SET110がSUPLをサポートしていることを検証してもよい(ステップB)。H−SLP130は、SET110に対するルーティング情報を取得し、ルーティング情報を使用して、SET110にメッセージを送ってもよい(同様に、ステップB)。H−SLP130は、等距離トリガサービスに対するSUPL/ロケーションセッションを開始するために、SET110に対してSUPL INITメッセージを送ってもよい(ステップC)。SUPL INITメッセージは、セッションID(セッション−id)や、等距離トリガサービスインジケータや、提案されたポジショニング方法(ポジ方法)や、および/または、他の情報を含んでいてもよい。セッションIDを使用して、SUPLセッションを識別することができる。
【0036】
SET110は、H−SLP130からSUPL INITメッセージを受信してもよく、SET110がもう既に接続していない場合には、それ自体をデータネットワークに接続するか、または、データ接続を確立してもよい(ステップD)。SET110は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET110は、H−SLP130との等距離トリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい。このメッセージは、セッションIDや、SET110の能力等を含んでいてもよい。SET能力は、SET110によりサポートされているポジショニング方法や、SET110によりサポートされているポジショニングプロトコル(例えば、3GPPにおける無線リソースLCSプロトコル(RRLP)や、3GPPにおける無線リソース制御(RRC)や、LTEポジショニングプロトコル(LPP)や、TIA−801等)や、および/または、他の情報を含んでいてもよい。
【0037】
H−SLP130は、SUPL TRIGGERED STARTメッセージを受信してもよく、受信したメッセージ中に含まれているSET能力を考慮することにより、等距離トリガセッションに対して使用するためのポジショニング方法を選択してもよい。その後、H−SLP130は、セッションIDや、選択したポジショニング方法(ポジ方法)や、トリガパラメータ等を含んでいてもよいSUPL TRIGGERED RESPONSEメッセージを、SET110に対して送ってもよい(ステップF)。SET110およびH−SLP130は、ステップFの後に、セキュアIP接続を解放してもよい。H−SLP130は、等距離トリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLPトリガされたロケーション報告返答(TLRA)メッセージを送ってもよい(ステップG)。
【0038】
ステップAないしステップGは、等距離トリガセッションに対するセットアップステップである。ステップAにおいてSUPLエージェント140により提供され、ステップFにおいてSET110に送られたトリガパラメータにしたがって、SET110に対するロケーション情報を、その後に報告してもよい。
【0039】
SET110は、SETベースモードにおいて支援データを取得するために、または、SET支援モードにおいてSET110のロケーションを決定するために、H−SLP130とのポジショニングセッションに携わってもよい。SET110は、H−SLP130とのポジショニングセッションを開始するために、SUPL POS INITメッセージを送ってもよい(ステップH)。このメッセージは、セッションIDや、ロケーションID(lid)や、SET能力や、支援データに対する要求や、および/または、他の情報を含んでいてもよい。その後、H−SLP130は、SET110とともにSUPL POSセッション(または、ポジショニングセッション)に携わってもよい(ステップI)。H−SLP130およびSET110は、SET110に支援データを提供するために、ならびに/あるいは、SET110に対するロケーション推定を算出するために、選択したポジショニングプロトコル(例えば、RRLP、RRC、LPP、または、TIA−801)に対してメッセージを交換する。H−SLP130は、SET110に対して、SUPL REPORTメッセージ中で、ロケーション推定および/または他の情報を送ってもよい(ステップJ)。
【0040】
SET110のロケーションは、SET110単独により、あるいは、ステップH、ステップI、および、ステップJを通して、H−SLP130の支援とともに、決定してもよい(ステップK)。例えば、進行した距離を算出するために、上記で説明したスキームのうちの何らかのものを使用して、SET110が進行した距離を更新してもよい(ステップL)。SET110は、予め規定された距離に対して、進行した距離を比較し、予め規定された距離だけSET110が移動したか否かを決定してもよい(ステップM)。予め規定された距離だけSET110が移動しており、トリガイベントが起こっている場合に、SET110は、H−SLP130に対してSUPL REPORTメッセージを送ってもよい(ステップN)。このメッセージは、トリガイベントが起こっているという表示を含んでいてもよく、SET110の現在のロケーションや、SET110が進行した距離や、および/または、他の情報も含んでいてもよい。トリガイベントに応答して、H−SLP130は、SUPLエージェント140に対してMLPトリガされたロケーション報告(TLREP)メッセージを送ってもよい(ステップO)。このメッセージは、要求IDや、トリガイベントが起こっているという表示や、SET110の現在のロケーションや、SET110が進行した距離や、現在のロケーションに対する日付および時間や、現在のロケーションを決定するために使用されたポジショニング方法や、および/または、他の情報を含んでいてもよい。トリガイベントが起こっていない場合には、ステップNとステップOはスキップしてもよい。
【0041】
ステップKないしステップOは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップP)。各処理サイクルは、SET110の現在のロケーションを決定するためのステップと、SET110が進行した距離を決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、報告を開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したときや、予め規定された最後の通過点に達したとき等に、等距離トリガセッションの終わりに達する。等距離トリガセッションの終わりに達したときに、H−SLP130とSET110は、セッションを終了してもよい。H−SLP130は、SET110に対してSUPL ENDメッセージを送ってもよく(ステップQ)、または、(図3には示されていないが、)SET110は、H−SLP130に対してSUPL ENDメッセージを送ってもよい。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。代替的に、各エンティティは、セッションの終わりを自律的に決定してもよく、何らかのシグナリングを交換することなく、セッションを終了してもよい。
【0042】
相対的なSET対SETトリガサービスは、ターゲットSETのロケーションと、基準SETのロケーションとを周期的に決定してもよく、基準SETロケーションを中心とした、移動する地理的なターゲットエリアにターゲットSETが入ったときに、または、基準SETロケーションを中心とした、移動する地理的なターゲットエリアをターゲットSETが離れたときに、ロケーション情報を報告してもよい。SUPLエージェントは、相対的なSET対SETトリガサービスを開始し、ターゲットSETおよび基準SETを識別し、適用可能なパラメータを提供してもよい。
【0043】
図4は、相対的なSET対SETトリガサービスに対する地理的なターゲットエリア410を示している。地理的なターゲットエリアは、基準SETのロケーションを中心としていてもよく、基準SETロケーションからのrの半径により規定された円形のエリアであってもよい。地理的なターゲットエリアは、基準SETのロケーションと同期して、移動する。一般に、地理的なターゲットエリアは、例えば、さらに複雑な多角形のような、何らかの形により規定されていてもよい。地理的なターゲットエリアはまた、(i)2次元で、水平的なロケーションにより規定されていてもよく、(ii)3次元で、水平的なロケーションと高度の双方によって規定されていてもよい。
【0044】
例えば、母親と子供が、ショッピングモールにいるかもしれない。母親は、彼女の周囲の半径27.42メートル(30ヤード)のエリアの外に子供が移動したときにはいつでも、通知してほしいと思っているかもしれず、これは、“迷子”シナリオとして呼ぶことがある。母親が基準端末を持ち運んでいてもよく、子供がターゲット端末を持ち運んでいてもよい。地理的なターゲットエリアは、母親のロケーションを中心とした、半径rによる円形のエリアとして規定されていてもよい。地理的なターゲットエリアは、母親の移動にしたがう、すなわち、母親とともにあちこち動き回る。子供(または、ターゲット端末)が、母親の周囲の地理的なターゲットエリアを離れたときにはいつでも(例えば、子供が、母親から27.42メートル(30ヤード)より遠くに移動したときに)、SUPLエージェントに通知してもよい。その後、SUPLエージェントは、子供が地理的なターゲットエリアを離れたこと、例えば、子供が迷子になっていることを母親に通知してもよい。母親がターゲット端末を持ち運び、子供が基準端末を持ち運んでいるような、端末の役割が逆であるときにも、この例をサポートすることができる。
【0045】
図5は、相対的なSET対SETトリガサービスに対するメッセージフロー500の設計を示している。SUPLエージェント140は、基準SET112のロケーションにより規定されている、移動する地理的なターゲットエリアに関するターゲットSET110のロケーションを知ることを望んでいるかもしれず、相対的なSET対SETトリガの表示を持つロケーション要求をH−SLP130に送ってもよい(ステップA)。その後、H−SLP130は、ターゲットUE110および基準SET112と通信して、相対的なSET対SETトリガセッションを確立してもよい(ステップBおよびステップC)。
【0046】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行するために、および、報告を開始するために、何らかのエンティティが指定されている。指定されたエンティティには、SET110およびSET112のロケーション、トリガパラメータ、および/または、他の関係する情報が提供される。明確さのために、下記の説明の大部分では、ターゲットSET110が、指定されたエンティティであると仮定する。
【0047】
基準SET112のロケーションは、SETベースモードにより、または、SET支援モードにより、決定してもよい(ステップD)。基準SET112のロケーションは、H−SLP130に提供されてもよく(ステップE)、H−SLP130は、ターゲットSET110に対してロケーションを転送してもよい(ステップF)。代替的に、(図5中で破線により示されているように、)基準SET112のロケーションは、H−SLP130を通すことなく、基準SET112により直接、ターゲットSET110に対して提供されてもよい。
【0048】
SETベースモードにより、または、SET支援モードにより、ターゲットSET110のロケーションをまた決定してもよい(ステップG)。ターゲットSET110は、SET110およびSET112のロケーションと、地理的なターゲットエリアを規定しているトリガパラメータとに基づいて、トリガイベントが起こったか否かをチェックしてもよい(ステップH)。ターゲットSET110が、地理的なターゲットエリアの内にあるかまたは外にある場合に、あるいは、ターゲットSET110が、地理的なターゲットエリアの内に移動するかまたは外に移動した場合に、トリガイベントが起こるかもしれない。このケースでは、ターゲットSET110は、トリガイベントが起こったことをH−SLP130に報告してもよい(ステップI)。報告は、ターゲットSET110の現在のロケーションや、基準SET112の現在のロケーションや、基準SET112に関するターゲットSET110のロケーション(例えば、50メートル東)や、および/または、他の情報を含んでいてもよい。その後、H−SLP130は、トリガイベントが起こったことをSUPLエージェント140に知らせるために、トリガ応答を送ってもよい(ステップJ)。応答は、SET110からのトリガ報告中に提供されている情報のうちのいくつかまたはすべてを含んでいてもよい。トリガイベントが起こっていない場合には、ステップIとステップJはスキップしてもよい。
【0049】
ステップDないしステップJは、1つの処理サイクルに対するものであってもよい。同様の方法で、付加的な処理サイクルを実行してもよい(ステップK)。各処理サイクルは、基準SET112の現在のロケーションを決定するためのステップと、ターゲットSET110の現在のロケーションを決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。基準SET112のロケーションは、ターゲットSET110のロケーションと同じレートまたは異なるレートにおいて決定してもよい。トリガイベントが起こった場合に、ターゲットSET110によるトリガイベント報告と、H−SLP130によるトリガ応答とを開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したとき等に、相対的なSET対SETトリガセッションの終わりに達する。セッションの終わりに達したときに、H−SLP130とSET110およびSET112とは、セッションを終了する(ステップLおよびステップM)。
【0050】
別の設計では、図5中のステップDおよびステップGにおいて、基準SETのロケーションとターゲットSETのロケーションを取得する代わりに、いずれかのSETが、他のSETに関する自身のロケーションを、これらのステップにおいて周期的に決定してもよい。例えば、ステップGにおいて、ターゲットSET110は、基準SET112に直接、信号(例えば、無線信号または赤外線信号)を送ってもよく、基準SET112は、SET110に対して応答信号を戻してもよい。SET110は、全体的な応答時間を測定し、SET112における内部遅延を減算する。SET112が、SET110へのその応答信号中に、SET112における内部遅延を含めてもよく、または、SET110が、他の手段により、SET112における内部遅延を決定してもよい。SET110は、往復信号伝播遅延を取得し、したがって、それ自体とSET112との間の距離を取得してもよい。その後、この距離を使用して、トリガ条件を評価することができる。さらに別の設計では、ステップDおよびGにおいて、SET110とSET112の双方の最初のロケーションを取得し、これらの最初のロケーションに関する各SETのロケーションを使用して、後続するロケーションを取得してもよい。相対的なロケーションはまた、各SET中のセンサーを使用して、取得してもよい。相対的なロケーションは、取得するために、より少ないシグナリングと処理リソースとを必要とするかもしれないし、短い間隔において、相対的なロケーションを取得できるかもしれない。
【0051】
図6は、SUPLメッセージを使用する、相対的なSET対SETトリガサービスに対するメッセージフロー600の設計を示している。SUPLエージェント140は、基準SET112のロケーションにより規定されている、移動する地理的なターゲットエリアに関するターゲットSET110のロケーションを知ることを望んでいるかもしれず、H−SLP130に対してMLP TLRRメッセージを送ってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント識別子(クライアント−id)や、ターゲットSET110識別子(ターゲットms−id)や、基準SET識別子(基準ms−id)や、相対的なSET対SETトリガサービスが要求されているという表示や、トリガパラメータ等を含んでいてもよい。トリガパラメータは、基準SETの周囲の地理的なターゲットエリアに関する情報(例えば、半径r)や、トリガイベント情報(例えば、ターゲットエリアの中にある、ターゲットエリアの外にある、ターゲットに入る、または、ターゲットエリアを離れる)や、セッション持続時間(例えば、開始時間、停止時間等)や、ならびに/あるいは、報告に対するトリガイベントを決定するのに使用することができる他の情報を含んでいてもよい。
【0052】
H−SLP130は、相対的なSET対SETトリガサービスに対して、SUPLエージェント140を認証および認可してもよい。H−SLP130はまた、SET110とSET112との通知および/または検証を実行してもよい。例えば、H−SLP130は、基準SET112のユーザから承認を取得して、基準SET112のロケーションを決定することが可能になり、場合によっては、ターゲットSET110、H−SLP130、および/または、SUPLエージェント140により、基準SET112のロケーションを共有することが可能になる。H−SLP130はまた、ターゲットSET110のユーザから承認を取得して、ターゲットSET110のロケーションを決定することが可能になり、場合によっては、基準SET112、H−SLP130、および/または、SUPLエージェント140により、共有することが可能になる。相対的なSET対SETトリガサービスはまた、各SETユーザのプライバシー設定の修正を動的に考慮にしてもよい。
【0053】
H−SLP130は、SET110およびSET112をルックアップし、これらのSETに対するルーティング情報を取得してもよい(ステップB)。H−SLP130は、相対的なSET対SETトリガサービスに対するSUPLセッションを開始するために、基準SET112に対してSUPL INITメッセージを送ってもよい(ステップC)。SET112は、SUPL INITメッセージを受信してもよく、それ自体を接続するか、または、データ接続を確立してもよい(ステップD)。SET112は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET112は、H−SLP130との相対的なSET対SETトリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい(ステップE)。H−SLP130は、SET112からSUPL TRIGGERED STARTメッセージを受信してもよく、SET112に対して使用するためのポジショニング方法を選択してもよい。その後、H−SLP130は、セッションIDや、選択したポジショニング方法や、トリガパラメータ等を含むSUPL TRIGGERED RESPONSEメッセージを、SET112に対して送ってもよい(ステップF)。H−SLP130は、ターゲットSET110に対して同様に、ステップCないしステップFを実行してもよい(ステップG)。H−SLP130は、相対的なSET対SETトリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLP TLRAメッセージを送ってもよい(ステップH)。
【0054】
その後に、H−SLP130と、ターゲットSET110と、基準SET112が協調して、トリガイベントの発生を検出してもよい。セッションの間に、各SET110のロケーションを周期的に(例えば、X秒ごとに)決定してもよい。1つの設計では、SETは、そのロケーションを自律的に測定して、決定してもよい。別の設計では、SETは、そのロケーションを決定するために、H−SLP130とのポジショニングセッションに携わってもよい。一般に、各SETのロケーションは、そのSETのみにより、H−SLP130からの支援とともにSETにより、SETからの支援とともにH−SLP130による等して、決定してもよい。基準SET112は、H−SLP130から支援データを取得するために、または、SET支援モードに対してそのロケーションを決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。同様に、ターゲットSET110は、H−SLP130から支援データを取得するために、または、SET支援モードに対してそのロケーションを決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。ステップI、ステップJ、および、ステップKは、それぞれ、図3において、ステップH、ステップI、および、ステップJに対して上記で説明したように、実行してもよい。
【0055】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。さらに別の設計では、基準SET112が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行して、報告を開始するために、何らかのエンティティまたはエンティティの何らかの組み合わせが指定されている。指定されたエンティティには、SET110およびSET112のロケーションと、トリガパラメータとが提供される。明確さのために、下記の説明では、ターゲットSET110が、トリガイベントをチェックして、報告を開始すると仮定する。
【0056】
基準SET112が、そのロケーションを決定してもよく(ステップL)、その現在のロケーションを持つSUPL REPORTメッセージをH−SLP130に対して送ってもよい(ステップM)。プルメカニズムに対しては、基準SETの現在のロケーションを要求するために、ターゲットSET110が、H−SLP130に対してSUPL POSITION REQUESTメッセージを送ってもよい(ステップN)。応答して、H−SLP130は、基準SET112の現在のロケーションを、SUPL REPORTメッセージ中で、ターゲットSET110に転送してもよい(ステップO)。プルメカニズムにより、ターゲットSET110が、その都合のよいときに、例えば、ターゲットSET110がオープンな接続を有しているときに、ロケーション情報を要求することが可能になるかもしれない。プッシュメカニズムに対しては、H−SLP130が、SET112から基準SET112のロケーションを受信したときにはいつでも、H−SLP130は、基準SET112のロケーションを転送してもよい。このケースでは、ステップOは起こるだろうが、ステップNはスキップしてもよい。プッシュメカニズムにより、ターゲットSET110が基準SETロケーションを周期的に要求する必要性なく、基準SETロケーションが入手可能なときにはいつでも、H−SLP130が基準SETロケーションを提供することが可能になるかもしれない。基準SET112はまた、H−SLP130と対話することなく、その現在のロケーションをターゲットSET110に直接送ってもよい。
【0057】
ターゲットSET110が、そのロケーションを決定してもよい(ステップP)。ターゲットSET110は、基準SET112の現在のロケーションに対して、その現在のロケーションを比較してもよく、ターゲットSET110が、基準SET112の現在のロケーションにより規定されている地理的なターゲットエリアの内にあるか、または、外にあるか、あるいは、基準SET112の現在のロケーションにより規定されている地理的なターゲットエリアの内に移動しているか、または、基準SET112の現在のロケーションにより規定されている地理的なターゲットエリアから外に移動しているか否かを決定してもよい(ステップQ)。トリガイベントが起こった場合に、ターゲットSET110は、イベントトリガの表示と、場合によっては、その現在のロケーションおよび/または基準SET112のロケーションとを持つSUPL REPORTメッセージを、H−SLP130に対して送ってもよい(ステップR)。その後、H−SLP130は、要求IDと、イベントトリガ表示と、場合によっては、他の情報とを含んでいてもよいMLP TLREPメッセージを、SUPLエージェント140に対して送ってもよく、他の情報は、ターゲットSET110のロケーションや、基準SET112のロケーションや、各ロケーションに対する日付および時間や、各ロケーションを決定するために使用したポジショニング方法や、ならびに/あるいは、他の情報のようなものである(ステップS)。ターゲットSET110には、例えば、ターゲットSET110によりトリガされる、基準SET112のロケーションに関するトリガイベントが知らされてもよい。基準SET112にはまた、例えば、ターゲットSET110によりトリガされる、それ自体のポジションに関するトリガイベントが知らされてもよい。
【0058】
ステップLないしステップSは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップT)。各処理サイクルは、各SETの現在のロケーションを決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、(例えば、ステップRおよびステップSにおいて)報告を開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したとき等に、相対的なSET対SETトリガセッションの終わりに達する。セッションの終わりに達したときに、H−SLP130と、ターゲットSET110と、基準SET112とが、セッションを終了してもよい。H−SLP130が、各SETに対してSUPL ENDメッセージを送ってもよい(ステップUおよびステップV)。SETがまた、SUPL ENDメッセージを送ってもよい。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。
【0059】
相対的なSET対SETトリガサービスを使用して、その中心が基準端末である地理的なターゲットエリアに関連して、ターゲット端末の移動を周期的に監視することができる。地理的なターゲットエリアは、基準端末(および、他のトリガサービスのケースのように、ターゲット端末でないもの)に関して規定されていてもよく、基準端末と同期して移動する。ターゲット端末が地理的なターゲットエリアの内または外にあるときや、ターゲット端末が地理的なターゲットエリアに入るかまたは離れるときにはいつでも、第三者(例えば、SUPLエージェント140)に通知が送られてもよい。第三者は、ロケーションサーバ(例えば、H−SLP130)に対してロケーション要求を送ってもよい。ロケーションサーバは、ターゲット端末と基準端末の双方とともにポジション決定手順を始めてもよい。ターゲット端末が、基準端末の周囲の地理的なターゲットエリアの内または外にあるか、基準端末の周囲の地理的なターゲットエリアに入るかまたは離れるかを検出できるように、基準端末のロケーションを周期的に決定し、ターゲット端末のロケーションと比較してもよい。このトリガイベントが検出されたときにはいつでも、ロケーションサーバは、ローカルクライアントと、場合によっては、ターゲット端末および/または基準端末とに通知してもよい。
【0060】
速度トリガサービスは、ターゲットSETの速度が、予め規定された速度(すなわち、速度レベル)に達したか否かを周期的に決定してもよく、トリガイベントが検出されたときに、速度を報告してもよい。SUPLエージェントは、速度トリガサービスを開始し、ターゲットSETを識別し、適用可能なパラメータを提供してもよい。
【0061】
速度は、スピードおよび/または方位を含んでいてもよい。スピードは、SETがどのくらい速く移動しているかを示すことができ、方位は、SETがどの方向に移動しているかを示すことができる。一般に、トリガ基準は、スピードのみに基づいて、または、方位のみに基づいて、あるいは、スピードと方位の双方に基づいて、規定されていてもよい。例えば、トリガ基準は、(i)トラックが112km/h(70mph)のスピードに達したときに、または、(ii)トラックが北に向かっているときに、あるいは、(iii)トラックが、112km/h(70mph)より速く、北に向かっているときに、報告を送るように規定されていてもよい。トリガ基準はまた、スピードの増加および/または減少に対して規定されていてもよい。例えば、(停止信号から開始して)トラックが112km/h(70mph)に達したときに、報告を送ってもよい。トラックはさらに加速して、144km/h(90mph)に達するかもしれない。トラックが112km/h(70mph)に減速したときに、別の報告を送ってもよい。代替的に、トラックがより低いレベル(例えば、104km/h(65mph))を下回って減速し、その後、112km/h(70mph)を超えた場合に、別の報告を送ってもよい。一般に、速度トリガサービスに対して使用される速度は、スピードのみのことを指してもよく、または、方位のみのことを指してもよく、あるいは、スピードと方位の双方のことを指してもよい。さまざまな速度トリガサービスに対して、さまざまなトリガ基準をまた使用してもよい。
【0062】
速度トリガは、さまざまな方法で規定されていてもよい。1つの設計では、初めに、ターゲットSETの速度が、より低いレベルを下回って落ちて、その後に、予め規定された速度を満たすかまたは超えたときに、速度トリガが起こるかもしれない。予め規定された速度に基づいて、より低いレベルを規定してもよい、例えば、より低いレベルは、予め規定された速度を下回るあるマージンであってもよい。例えば、トラックが交通信号において開始し、その後に、112km/h(70mph)の予め規定された速度に達することがあり、112km/h(70mph)の予め規定された速度は、104km/h(65mph)のスピード制限プラス8km/h(5mph)のマージンに基づいて、規定されているかもしれない。トラックが初めに112km/h(70mph)に達したときに、速度トリガが生じるかもしれない、そして、トラックがより低いレベルを上回るスピードを保ち続ける限り、速度トリガは何も起こらないかもしれない。より低いレベルは、96km/h(60mph)であってもよく、96km/h(60mph)は、104km/h(65mph)のスピード制限マイナス8km/h(5mph)のマージンに基づいて、規定されているかもしれない。トラックが、96km/h(60mph)のより低いレベルを下回って減速し、その後、112km/h(70mph)の予め規定された速度を満たすかまたは超えた場合に、別の速度トリガが起こるかもしれない。別の設計では、ターゲットSETの速度が、予め規定された速度を超えた場合に、速度トリガが起こるかもしれないが、速度トリガは、各予め規定された時間間隔において、多くて1つの速度トリガに制限されているかもしれない。上記の例に対しては、速度トリガは、トラックが予め規定された速度を満たすかまたは超えた、5分の予め規定された時間間隔ごとに起こるかもしれない。速度トリガはまた、他の方法で規定されていてもよい。
【0063】
図7は、SUPLメッセージを使用する、速度トリガサービスに対するメッセージフロー700の設計を示している。SUPLエージェント140は、ターゲットSET110の速度が、ターゲット速度に達したときにはいつでも、知ることを望んでいるかもしれず、H−SLP130に対してMLP TLRRメッセージを送ってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント識別子や、ターゲットSET識別子や、速度トリガサービスが要求されているという表示や、トリガパラメータ等を含んでいてもよい。トリガパラメータは、ターゲット速度や、開始時間や、停止時間等を含んでいてもよい。H−SLP130は、速度トリガサービスに対して、SUPLエージェント140を認証および認可してもよい。H−SLP130はまた、ターゲットSET110との通知および/または検証を実行してもよい。速度トリガサービスはまた、ターゲットSETユーザのプライバシー設定の修正を動的に考慮してもよい。
【0064】
H−SLP130は、SET110をルックアップし、SETに対するルーティング情報を取得してもよい(ステップB)。H−SLP130は、速度トリガサービスに対するSUPLセッションを開始するために、SET110に対してSUPL INITメッセージを送ってもよい(ステップC)。SET110は、SUPL INITメッセージを受信し、それ自体を接続するか、または、データ接続を確立してもよい(ステップD)。SET110は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET110は、H−SLP130との速度トリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい(ステップE)。H−SLP130は、SUPL TRIGGERED STARTメッセージを受信し、SET110に対して使用するためのポジショニング方法を選択し、セッションIDや、選択したポジショニング方法や、トリガパラメータ等を含んでいてもよいSUPL TRIGGERED RESPONSEメッセージを戻してもよい(ステップF)。H−SLP130は、速度トリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLP TLRAメッセージを送ってもよい(ステップG)。
【0065】
その後に、H−SLP130とターゲットSET110が協調して、トリガイベントの発生を検出してもよい。セッションの間に、SET110の速度を周期的に(例えば、X秒ごとに)決定してもよい。1つの設計では、SETは、その速度を自律的に測定し、決定してもよい。別の設計では、SETは、H−SLP130と対話して、その速度を決定してもよい。一般に、SET110の速度は、SET110のみにより、H−SLP130からの支援とともにSET110により、SET110からの支援とともにH−SLP130による等して、決定してもよい。ターゲットSET110は、H−SLP130から支援データを取得するために、または、SET支援モードに対してその速度を決定するために、必要に応じて、ステップH、ステップI、および、ステップJを実行してもよい。
【0066】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。SET110は、その速度を決定してもよい(ステップK)。SET110は、ターゲット速度に対して、その現在の速度を比較してもよく、現在の速度がターゲット速度を超えているか否かを決定してもよい(ステップL)。トリガイベントが起こった場合に、ターゲットSET110は、トリガイベントの表示と、場合によっては、その速度とを持つSUPL REPORTメッセージを、H−SLP130に対して送ってもよい(ステップM)。その後、H−SLP130は、要求IDや、トリガイベント表示や、SET110の速度や、SET110のロケーション等を含んでいてもよいMLP TLREPメッセージを、SUPLエージェント140に対して送ってもよい(ステップN)。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行して、報告を開始するために、何らかのエンティティが指定されている。指定されたエンティティには、SET110の速度と、トリガパラメータとが提供される。
【0067】
ステップKないしステップNは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップO)。各処理サイクルは、SET110の速度を決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、報告を開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したとき等に、速度トリガセッションの終わりに達する。速度トリガセッションの終わりに達したときに、H−SLP130とSET110は、セッションを終了してもよい。H−SLP130が、SET110に対してSUPL ENDメッセージを送ってもよい(ステップP)。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。
【0068】
速度トリガサービスを使用して、ターゲット端末を周期的に監視し、ターゲット端末の速度が予め規定されたレベルに達したときにはいつでも、第三者(例えば、SUPLエージェント140)に通知を送ってもよい。第三者は、ロケーションサーバ(例えば、H−SLP130)に対してロケーション要求を送ってもよい。ターゲット端末と協調しているロケーションサーバは、ポジションおよび速度の決定手順を開始してもよい。手順により、予め規定されたレベルを超えている端末速度の検出が可能になるかもしれない。このトリガイベントを検出したときにはいつでも、ロケーションサーバが、ロケーションクライアントに通知してもよい。例えば、それらのトラックが112km/h(70mph)を超えたときにはいつでも、知りたいと思っているかもしれない運送会社のオペレーションセンターにより、このサービスを使用してもよい。その保険契約者が一般的にローカルのスピード制限を遵守していることを検証するために、保険会社によっても、このサービスを使用してもよく、例えば、ローカルのスピード制限を遵守していることにより、その後、保険契約者には、より低い保険料という資格が与えられるかもしれない。
【0069】
T−D−Vの組み合わせのトリガサービスは、最後の報告以降に経過した時間と、最後の報告以降に進行した距離と、最後の報告以降に達した最高速度とに基づいて規定されているトリガイベントをサポートすることができる。T−D−Vの組み合わせのトリガサービスは、経過した時間や、進行した距離や、最高速度、および/または、他のパラメータの他の組み合わせもサポートすることができる。例えば、時間、距離、および、速度の以下の関数のうちの1つに基づいて、T−D−Vの組み合わせのトリガ(または、トリガ条件)を規定してもよい:
【数1】
【0070】
または、
【数2】
【0071】
ここで、T、D、および、Vは、それぞれ、最後の報告以降に経過した時間と、最後の報告以降に進行した距離と、最後の報告以降の最高速度とに対する現在の値である。
f(T)は、時間トリガに対する式(例えば、ブール式)であり、
g(D)は、距離トリガに対する式(例えば、ブール式)であり、
h(V)は、速度トリガに対する式(例えば、ブール式)であり、
“AND”は、論理AND演算を示しており、
“OR”は、論理OR演算を示している。
【0072】
ブール式は、その入力パラメータの関数に基づいて、真または偽の出力を返す。例として、進行した距離に対するブール式は、g(D)=(D≧D1)として規定してもよく、ここで、D1は、予め規定された距離である。進行した距離Dが、予め規定された距離D1に等しい、または、予め規定された距離D1より大きい場合に、式は真であり、そうでなければ、偽であるだろう。f1(T)とf2(T)は、i=1または2に対する、fi(T)=(T≧Ti)により与えられる、時間トリガに対する2つのブール式であり、ここで、T1とT2は、経過した時間に対する2つの予め規定された値である。同様の方法で、速度トリガに対する式を規定してもよい。いったん、何らかのトリガ条件が起こると、次の報告まで、そのトリガ条件は有効なままであるかもしれない。このことは、新しい報告が送られた後まで、トリガが起こり、そして、後に消失するのを防ぐだろう。
【0073】
例えば、車隊管理センターは、最後の報告以降にトラックが16キロメートル(10マイル)(D1=16キロメートル(10マイル))移動したときにはいつでも、対象としているそのトラックの移動に関する更新を報告で欲しいと思っているかもしれないが、報告は、せいぜい、1時間ごとに(T1=60分)トラック当たり1つである。センターはまた、トラックが120km/h(75mph)(V1=120km/h(75mph))に達した場合には、即座に知らせてほしいと思っているかもしれない。コンボトリガ関数は、次のように規定してもよい:
【数3】
【0074】
ここで、Tは、最後の報告が送られた以降に経過した時間であり、
Dは、最後の報告以降に進行した距離であり、
Vは、最後の報告以降の最高スピードである。
【0075】
進行した距離Dは、(i)ロケーション測定値間の増分距離の合計として計算してもよく、または、(ii)最後の報告中のロケーションまでの距離として計算してもよい。例えば、ケース(i)に対する変数T、Dと、Vとは、すべて、時間の増加する関数とすることができる。
【0076】
スピードを出しているドライバーに対する過剰な報告の発生を避けるために、センターは、10分(T2=10分)ごとにせいぜい1つのスピード報告を望むかもしれない。そこで、コンボトリガ関数は、次のように規定してもよい:
【数4】
【0077】
上記の方程式により示されているように、DおよびVに対する異なる予め規定された値とともに、異なる予め規定された時間値を使用してもよい。
【0078】
1つの設計では、T−D−Vの組み合わせのトリガサービスに対してより高い柔軟性を可能にするために、上記のブール式(例えば、f(T)、g(D)、および、h(V))は、SETの現在のロケーションや、最後の報告以降のSETロケーションの組や、現在の時間や、または、最後の報告以降の時間期間等を含んでいてもよく、あるいは、これらに依存してもよい。このことを使用して、進行した距離と、最高速度と、次の報告までの時間とに対して異なる予め規定された値を設定してもよい。例えば、運送会社は、最後の報告以降に進行したロケーションに対する普通の(例えば、最高)スピード制限にしたがって、予め規定された最高速度を調整してもよい。この会社はまた、ルートのタイプにしたがって、予め規定された進行距離を調整してもよい、例えば、主要な高速道路に沿って進行しているトラックに対しては、より大きい予め規定された距離を使用して、予め規定された進行距離を調整してもよい。この会社はまた、時刻にしたがって、例えば、日中の忙しく移動する期間に対しては、より短い間隔を使用して、および、夕方または夜のような余り忙しくない期間に対しては、より長い間隔を使用して、予め規定された時間間隔を調整してもよい。
【0079】
図8は、SUPLメッセージを使用する、T−D−Vの組み合わせのトリガサービスに対するメッセージフロー800の設計を示している。SUPLエージェント140は、ターゲットSET110に対するロケーション情報および/または速度情報を知ることを望んでいるかもしれず、H−SLP130に対してMLP TLRRメッセージを送ってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント識別子や、ターゲットSET識別子や、T−D−Vの組み合わせのトリガサービスが要求されているという表示や、トリガパラメータ等を含んでいてもよい。トリガパラメータは、Tのパラメータ、Dのパラメータ、および/または、Vのパラメータや、例えば、[(T≧T1)AND(D≧D1)OR(V≧V1)]のような、所望のコンボトリガ関数や、開始時間や、停止時間等を含んでいてもよい。H−SLP130は、T−D−Vの組み合わせのトリガサービスに対して、SUPLエージェント140を認証および認可してもよい。H−SLP130はまた、ターゲットSET110との通知および/または検証を実行してもよい。T−D−Vの組み合わせのトリガサービスはまた、ターゲットSETユーザのプライバシー設定の修正を動的に考慮にしてもよい。
【0080】
H−SLP130は、SET110をルックアップし、SETに対するルーティング情報を取得してもよい(ステップB)。H−SLP130は、T−D−Vの組み合わせのトリガサービスに対するSUPLセッションを開始するために、SET110に対してSUPL INITメッセージを送ってもよい(ステップC)。SET110は、SUPL INITメッセージを受信し、それ自体を接続するか、または、データ接続を確立してもよい(ステップD)。SET110は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET110は、H−SLP130とのT−D−Vの組み合わせのトリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい(ステップE)。H−SLP130は、SUPL TRIGGERED STARTメッセージを受信し、SET110に対して使用するためのポジショニング方法を選択し、セッションIDや、選択したポジショニング方法や、トリガパラメータ等を含んでいてもよいSUPL TRIGGERED RESPONSEメッセージを戻してもよい(ステップF)。H−SLP130は、T−D−Vの組み合わせのトリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLP TLRAメッセージを送ってもよい(ステップG)。
【0081】
ターゲットSET110は、H−SLP130からの支援データを取得するために、あるいは、SET支援モードに対してそのロケーションおよび/または速度を決定するために、必要に応じて、ステップH、ステップI、および、ステップJを実行してもよい。H−SLP130とターゲットSET110が協調して、トリガイベントの発生を検出してもよい。セッションの間に、SET110のロケーションおよび/または速度を周期的に(例えば、X秒ごとに)決定してもよい。1つの設計では、SET110は、そのロケーションおよび/または速度を自律的に測定し、決定してもよい(ステップK)。別の設計では、SET110は、(例えば、図8中のステップH、ステップI、およびステップJを使用して、)H−SLP130と対話して、そのロケーションおよび/または速度を決定してもよい。一般に、SET110のロケーションおよび/または速度は、SET110のみにより、H−SLP130からの支援とともにSET110により、SET110からの支援とともにH−SLP130による等して、決定してもよい。
【0082】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。SET110は、トリガイベントが起こったか否かを決定するために、現在のTの値、Dの値、および、Vの値を決定してもよく、コンボトリガ関数にしたがって、これらの値を論理的に組み合わせてもよい(ステップL)。トリガイベントが起こった場合に、ターゲットSET110は、トリガイベントの表示と、場合によっては、そのロケーションおよび/または速度とを持つSUPL REPORTメッセージを、H−SLP130に対して送ってもよい(ステップM)。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。いずれのケースでも、トリガイベントに応答して、H−SLP130は、要求IDや、トリガイベント表示や、SET110のロケーションおよび/または速度や、起こったトリガに対する条件や、ならびに/あるいは、他の情報を含んでいてもよいMLP TLREPメッセージを、SUPLエージェント140に対して送ってもよい(ステップN)。
【0083】
ステップKないしステップNは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップO)。各処理サイクルは、SET110のロケーションおよび/または速度を決定するためのステップと、SET110が進行した距離を更新するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に報告を開始してもよく、そうでなければ、スキップしてもよい。T−D−Vの組み合わせのトリガセッションの終わりに達したときに(例えば、停止時間に達したときに)、H−SLP130とSET110は、セッションを終了してもよい。H−SLP130が、SET110に対してSUPL ENDメッセージを送ってもよい(ステップP)。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。
【0084】
T−D−Vの組み合わせのトリガサービスを使用して、移動体端末を周期的に監視し、時間T、距離D、および/または、速度Vに基づいて、トリガイベントが起こったときにはいつでも、第三者(例えば、SUPLエージェント140)に通知を送ってもよい。第三者は、ロケーションサーバ(例えば、H−SLP130)にロケーション要求を送ってもよい。ロケーションサーバとターゲット端末が協調して、端末のロケーションおよび/または速度に基づいて、トリガイベントの発生を検出してもよい。トリガイベントを検出したときにはいつでも、ロケーションサーバは、ロケーションクライアントに通知してもよい。
【0085】
別の態様では、SET対SET速度サービスは、要求SETが、SET対SET速度セッションの間に、1つ以上のターゲットSETの絶対的な速度または相対的な速度を、進行中のベースで(例えば、周期的に、1回、等)取得することを可能にする。SUPLエージェントは、要求SET中に存在していてもよく、ターゲットSETの速度を要求してもよい。各SETは、H−SLPとのポジショニング手順を実行することが可能であってもよく、および/または、それ自体で、ポジショニング手順を実行することが可能であってもよい。ポジショニング手順は、SETのロケーションおよび/または速度を含んでいてもよいロケーション情報を提供することができる。
【0086】
図9は、SUPLメッセージを使用する、SET対SET速度サービスに対するメッセージフロー900の設計を示している。要求SET114中のSUPLエージェント144は、ターゲットSET110の速度を知ることを望んでいるかもしれない。SUPLエージェント144はSET114中に存在しているので、SET開始のサービスを使用することができ、SUPLエージェント144は、SET対SET速度サービスを開始することをSET114に内部的に要求してもよい(ステップA)。その後、要求SET114は、H−SLP130と通信して、SET開始トリガセッションを確立してもよい(ステップB)。ステップBにおけるセッション確立は、(i)SET114が、H−SLP130に対してSUPL TRIGGERED STARTメッセージを送ることと、(ii)H−SLP130が、SET114に対してSUPL TRIGGERED RESPONSEメッセージを戻すこととを含んでいてもよい。SUPL TRIGGERED STARTメッセージは、SET対SET速度サービスが要求されていることを示していてもよく、SUPL TRIGGERED STARTメッセージはまた、要求SET識別子や、ターゲットSET識別子や、相対的なまたは絶対的な速度が要求されているか否かという表示や、セッションの開始時間および停止時間や、確定の数や、確定間の間隔等のような情報を含んでいてもよい。H−SLP130は、SET対SET速度サービスに対して、SET114を認証および認可してもよい。ステップBにおけるセッション確立に続いて、SET114は、SUPLエージェント144に対して、要求を内部的に肯定応答してもよく、要求されたサービスを実行するだろうことを確認通知してもよい(ステップC)。H−SLP130は、ターゲットSET110とのロケーションセッションを確立してもよい(ステップD〜ステップH)。これは、SET110との通知および/または検証を含んでいてもよい。
【0087】
H−SLP130は、セッションの間に、要求SET114および/またはターゲットSET110と協調して、ターゲットSET110の速度を決定し、基準SET114の速度を決定し、ターゲットSET110に支援を提供し、および/または、基準SET114に支援を提供してもよい。H−SLP130はまた、セッションの間に、ターゲットSET110の速度を要求SET114と共有すること、および/または、要求SET114の速度をターゲットSET110と共有することを伴ってもよい。
【0088】
ターゲットSET110は、H−SLP130から支援データを取得するために、または、SET支援モードに対してその速度を決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。同様に、基準SET114は、H−SLP130から支援データを取得するために、または、その速度を決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。ターゲットSET110が、その速度を決定してもよく(ステップL)、その速度を持つSUPL REPORTメッセージをH−SLP130に対して送ってもよい(ステップM)。要求SET114は、ターゲットSET110の速度を要求するために、H−SLP130にSUPL POSITION REQUESTメッセージを送ってもよい(ステップN)。応答して、H−SLP130が、SUPL REPORTメッセージ中で、ターゲットSET110の現在の速度を、要求SET114に転送してもよい(ステップO)。SET110からターゲットSET110の速度を受信したときにはいつでも、H−SLP130はまた、ターゲットSET110の速度を転送してもよい。ターゲットSET110はまた、(例えば、図9中の破線により示されているように、)H−SLP130と対話することなく、その速度を直接、要求SET114に送ってもよい。いずれのケースでも、要求SET114は、ターゲットSET110の速度をSUPLエージェント144に対して提供することができる(ステップP)。
【0089】
ステップLないしステップPは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップQ)。各処理サイクルは、ターゲットSET110の速度を決定するためのステップと、速度を要求SET114に提供するためのステップとを含んでいてもよい。例えば、停止時間に達したとき等に、SET対SET速度セッションの終わりに達する。セッションの終わりに達したときに、H−SLP130と、要求SET114と、ターゲットSET110とが、セッションを終了してもよい。H−SLP130が、ターゲットSET110に対してSUPL ENDメッセージを送ってもよい(ステップR)。H−SLP130はまた、セッションの終わりを要求SET114に通知してもよく、その後、SET114が、SUPLエージェント144に通知してもよい。
【0090】
簡潔さのために、図9は、要求SET114が、1つのターゲットSET110の速度を要求するケースを示している。要求SET114はまた、複数のターゲットSET110の速度を要求してもよい。各ターゲットSETは、ターゲットSET110に対して、図9において示されているような処理を実行してもよい。
【0091】
図9に基づいている別の設計では、要求SET114は、ターゲットSET110と直接、信号(例えば、無線信号または赤外線信号)を交換することにより、ターゲットSET110に関する要求SET114の速度を決定してもよい。いずれかのSETが、往復信号伝播遅延を測定してもよく、信号測定値に基づいて、SET間の直線距離を取得してもよい。信号測定値と距離算出とを短い間隔で繰り返すことにより、いずれかのSETが、もう一方のSETに関する一方のSETの相対的な速度を取得することができる。代替的に、SET間で交換された信号が、固定かつ既知の周波数成分を、あるいは、固定された既知の間隔で繰り返されている、信号内の何らかのマーカーを含んでいる場合に、周波数成分の周波数における変化をまたは周期的なマーカーの変化を測定することにより、いずれかのSETが、もう一方のSETに関するその相対的な速度を取得することができる。双方のSETに対して、図9中のステップI〜ステップLを、この信号交換および測定の手順に置換してもよい。
【0092】
図3および図6〜図9は、SUPLメッセージを使用する、異なるロケーションサービスに対する例示的なメッセージフローを示している。メッセージフローを変更してもよい。例えば、SUPLエージェント140は、進行中のセッションを終了するようにH−SLP130に要求してもよい。H−SLP130、SET110、および/または、SET112もまた、進行中のセッションを終了することを決めてもよい。これらのケースでは、H−SLP130、SET110、および、(存在する場合には)SET112が、セッションを終了させるためのアクションを取ってもよい。SUPLエージェント140、H−SLP130、SET110、または、(存在する場合には)SET112は、サービスを中断することを要求してもよい。このケースでは、中断を要求しているエンティティにより、サービスの再開に対する要求が行われるまで、ポジション決定とトリガイベント検出とは中断される(すなわち、実行されない)。
【0093】
ここで説明したロケーションサービスにより、SUPLエージェントが、複数の要求を行って、結果を評価する代わりに、H−SLPに対する単一のロケーション要求によって、ターゲットSETに対するロケーション情報を取得することが可能になる。トリガロケーションサービスは、ロケーション要求の数を減少させることができ、SUPLエージェント、H−SLP、および、ターゲットSETのような、すべての影響を受けるエンティティに対するシグナリングならびに処理の量を大幅に減少させることができる。
【0094】
図10は、トリガロケーションサービスをサポートするためのプロセス1000の設計を示している。端末/SET、H−SLP、または、他の何らかのエンティティにより、プロセス1000を実行してもよい。端末に対する少なくとも1つのロケーション関連測定値を取得してもよい(ブロック1012)。各ロケーション関連測定値は、端末が進行した距離に対するもの、または、端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定してもよい(ブロック1014)。トリガイベントが起こっていた場合に、報告を送ってもよい(ブロック1016)。
【0095】
1つの設計では、等距離トリガサービスに対しては、少なくとも1つのロケーション関連値は、端末が進行した距離に対するものであってもよい。端末が進行した距離は、さまざまな方法で決定することができる。1つの設計では、(i)端末のロケーションを周期的に決定することにより、および、(ii)最後のトリガイベント以降の(またはトリガされたセッションの開始以降の)端末の連続するロケーション間の増分距離を累積することにより、進行した距離を決定してもよい。別の設計では、端末の現在のロケーションと、開始のロケーションとの間の距離に基づいて、進行した距離を決定してもよく、開始のロケーションは、最後のトリガイベントにおける端末のロケーションであってもよい。さらに別の設計では、端末の現在のロケーションと開始のロケーションとの間の特定のルートに沿った距離に基づいて、進行した距離を決定してもよい。この特定のルートは、直線の通った道筋に沿っていてもよく、または、さらに複雑なルートに沿っていてもよい。端末が進行した距離はまた、他の方法で決定してもよい。いずれのケースでも、端末が進行した距離に基づいて、トリガイベントが起こったか否かを決定することができる。例えば、端末が進行した距離が、予め規定された距離を超えている場合に、トリガイベントを宣言してもよい。
【0096】
別の設計では、相対的なSET対SETトリガサービスに対しては、少なくとも1つのロケーション関連測定値は、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。基準端末のロケーションに基づいて、移動する地理的なターゲットエリアを決定してもよい。例えば、移動する地理的なターゲットエリアは、基準端末のロケーションを中心とした、予め規定された半径を有する円形のエリアであってもよい。移動する地理的なターゲットエリアに関する端末のロケーションに基づいて、トリガイベントが起こったか否かを決定してもよい。例えば、端末のロケーションが、移動する地理的なターゲットエリアに関する基準に一致する場合に、トリガイベントを宣言してもよい。基準は、移動する地理的なターゲットエリアの内にあるか、外にあるか、移動する地理的なターゲットエリアに入るか、あるいは、移動する地理的なターゲットエリアを離れるかであってもよい。
【0097】
さらに別の設計では、速度トリガサービスに対しては、端末に対する少なくとも1つのロケーション関連測定値は、端末の速度に対するものであってもよい。速度は、スピードのみを、または、方位のみを、または、スピードと方位の双方を含んでいてもよい。端末の速度に基づいて、トリガイベントが起こったか否かを決定してもよい。例えば、周期的に、端末の速度を決定してもよい。最後のトリガイベント以降の何らかの時間における端末の速度が、予め規定された速度を満たすか、または、超えた場合に、トリガイベントを宣言してもよい。
【0098】
さらに別の設計では、T−D−Vの組み合わせのトリガサービスに対しては、少なくとも1つのロケーション関連測定値は、端末が進行した距離に対するもの、および、端末の速度に対するものであってもよい。端末が進行した距離に基づいて、端末の速度に基づいて、および/または、最後のトリガイベント以降に経過した時間に基づいて、トリガイベントが起こったか否かを決定してもよい。例えば、複数の式を決定してもよい。各式は、予め規定された距離に関する、端末が進行した距離に対するものであってもよく、または、予め規定された速度に関する、端末の最高速度に対するものであってもよく、または、予め規定された時間に関する、経過した時間に対するものであってもよい。複数の式の関数に基づいて、トリガイベントが起こったか否かを決定してもよい。
【0099】
図11は、SET対SET速度サービスをサポートするプロセス1100の設計を示している。第1の端末/SETにより、プロセス1100を実行してもよい。第1の端末は、第2の端末の速度に対する要求を、例えば、H−SLPのようなロケーションセンターに送ってもよい(ブロック1112)。第1の端末は、その後に、例えば、ロケーションセンターから、または、ロケーションセンターを通すことなく第2の端末から直接、第2の端末の速度を受信してもよい(ブロック1114)。第1の端末は、1回または複数回のいずれかで(例えば、周期的に)、要求に応答した第2の端末の速度を受信してもよい。
【0100】
図12は、図1中の、端末/SET110と、ワイヤレスネットワーク120と、ロケーションサーバ/H−SLP130との設計のブロックダイヤグラムを示している。簡潔さのために、図12は、端末110に対して、1つ以上の制御装置/プロセッサ1210と、1つのメモリ1212と、1つの送信機/受信機(TMTR/RCVR)1214とを示し、ワイヤレスネットワーク120に対して、1つ以上の制御装置/プロセッサ1220と、1つのメモリ1222と、1つの送信機/受信機1224と、1つの通信(Comm)ユニット1226とを示し、H−SLP130に対して、1つ以上の制御装置/プロセッサ1230と、1つのメモリ1232と、1つの通信ユニット1234とを示している。一般に、各エンティティは、任意の数のプロセッサ、制御装置、メモリ、送信機/受信機、通信ユニット等を備えていてもよい。端末110は、1つ以上のワイヤレスネットワークおよび/またはワイヤラインネットワークとの通信をサポートしてもよい。端末110はまた、例えば、GPS、Galileo等のような、1つ以上の衛星ポジショニングシステムから、信号を受信して処理してもよい。
【0101】
ダウンリンク上で、ワイヤレスネットワーク120は、そのカバレッジエリア内の端末に対して、トラフィックデータと、シグナリングと、パイロットとを送信してもよい。これらのさまざまなタイプの情報は、プロセッサ1220により処理され、送信機1224により調整され、ダウンリンク上で送信されてもよい。端末110において、ワイヤレスネットワーク120からのダウンリンク信号は、さまざまなタイプの情報を取得するために、受信機1214により受信および調整され、プロセッサ1210によりさらに処理されてもよい。プロセッサ1210は、図10中のプロセス1000を、図11中のプロセス1100を、および/または、ここで説明する技術に対する他のプロセスを、実行してもよい。プロセッサ1210はまた、図2、図3、および、図5〜図9中の何らかのSETに対する処理を実行してもよい。メモリ1212とメモリ1222は、端末110に対するプログラムコードおよびデータと、ワイヤレスネットワーク120に対するプログラムコードおよびデータとをそれぞれ記憶していてもよい。アップリンク上で、端末110は、ワイヤレスネットワーク120に対して、トラフィックデータと、シグナリングと、パイロットとを送信してもよい。これらのさまざまなタイプの情報は、プロセッサ1210により処理され、送信機1214により調整され、アップリンク上で送信されてもよい。ワイヤレスネットワーク120において、端末110および他の端末からのアップリンク信号は、端末からのさまざまなタイプの情報を取得するために、受信機1224により受信および調整され、プロセッサ1220によりさらに処理されてもよい。ワイヤレスネットワーク120は、通信ユニット1226を通して、H−SLP130と直接的にまたは間接的に通信してもよい。
【0102】
H−SLP130内では、プロセッサ1230は、端末に対するロケーションサービスをサポートするための処理を実行してもよい。例えば、プロセッサ1230は、図10中のプロセス1000を、および/または、ここで説明する技術に対する他のプロセスを、実行してもよい。プロセッサ1230はまた、図2、図3、および、図5〜図9中のH−SLP130に対する処理を実行してもよい。プロセッサ1230はまた、端末110に対するロケーション推定を計算し、SUPLエージェント140に対してロケーション情報を提供する等してもよい。メモリ1232は、H−SLP130に対するプログラムコードおよびデータを記憶していてもよい。通信ユニット1234により、H−SLP130が、ワイヤレスネットワーク120、端末110、および/または、他のネットワークエンティティと通信することが可能になるかもしれない。H−SLP130と端末110は、ユーザプレーン(例えば、SUPL)を通してメッセージを交換してもよく、これらのメッセージは、ワイヤレスネットワーク120によりトランスポートされてもよい。
【0103】
当業者は、さまざまな異なる技術および技法のうちの何らかのものを使用して、情報および信号を表してもよいことを理解するだろう。例えば、上記の説明全体を通して参照された、データ、命令、コマンド、情報、信号、ビット、シンボルおよびチップは、電圧、電流、電磁波、磁界または磁気の粒子、光学界または光の粒子、あるいはこれらの何らかの組み合わせにより、表してもよい。
【0104】
ここでの開示に関連して説明した、さまざまな例示的な論理ブロック、モジュール、回路およびアルゴリズムステップが、電子ハードウェア、コンピュータソフトウェア、あるいは双方の組み合わせたものとして実現されてもよいことを当業者はさらに正しく認識するであろう。ハードウェアおよびソフトウェアのこの交換可能性を明確に示すために、さまざまな例示的なコンポーネント、ブロック、モジュール、回路およびステップを一般的にこれらの機能性に関して上記で説明した。このような機能性がハードウェアあるいはソフトウェアとして実現されるか否かは、特定の応用および全体的なシステムに課せられた設計の制約に依存する。当業者は、それぞれの特定の応用に対して方法を変化させて、説明した機能性を実現してもよいが、このようなインプリメンテーション決定は、本開示の範囲からの逸脱を生じさせるものとして解釈すべきではない。
【0105】
ここで説明したポジション決定技法は、ワイヤレスワイドエリアネットワーク(WWAN)や、ワイヤレスローカルエリアネットワーク(WLAN)や、ワイヤレスパーソナルエリアネットワーク(WPAN)等のような、さまざまなワイヤレス通信ネットワークに関連して実現してもよい。用語“ネットワーク”および“システム”は、区別なく使用することが多い。WWANは、コード分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一搬送波周波数分割多元接続(SC−FDMA)ネットワーク、ロングタームエボリューション(LTE)ネットワーク、WiMAX(IEEE802.16)ネットワーク等であってもよい。CDMAネットワークは、cdma2000、ワイドバンドCDMA(W−CDMA)等のような、1つ以上の無線接続技術(RAT)を実現してもよい。cdma2000は、IS−95、IS−2000、および、IS−856標準規格を含んでいる。TDMAネットワークは、グローバルシステムフォーモバイルコミュニケーション(GSM(登録商標))、デジタル高度移動体電話機システム(D−AMPS)、または、他の何らかのRATを実現してもよい。GSMとW−CDMAとは、“第3世代パートナーシッププロジェクト”(3GPP)という名のコンソーシアムからの文書中に記述されている。cdma2000は、“第3世代パートナーシッププロジェクト2”(3GPP2)という名のコンソーシアムからの文書中に記述されている。3GPPおよび3GPP2の文書は、公然と利用可能である。WLANは、IEEE802.11xネットワークであってもよく、WPANは、ブルートゥース(登録商標)ネットワークや、IEEE802.15xや、または、他の何らかのタイプのネットワークであってもよい。技法はまた、WWAN、WLAN、および/またはWPANの任意の組み合わせに関連して実現してもよい。
【0106】
衛星ポジショニングシステム(SPS)は、典型的に、送信機から受信した信号に少なくとも部分的に基づいて、エンティティが自己のロケーションを、地球上で、または、地球より上で、決定することが可能であるように配置されている送信機のシステムを具備している。このような送信機は、典型的に、1組のチップ数の反復擬似ランダムノイズ(PN)コードでマークされている信号を送信し、地上ベースの制御局、ユーザ機器、および/または、宇宙ビークル上に位置付けられていてもよい。特定の例では、このような送信機は、地球軌道衛星ビークル(SV)上に位置付けられていてもよい。例えば、グローバルポジショニングシステム(GPS)、Galileo、Glonass、または、Compassのような、グローバルナビゲーション衛星システム(GNSS)配列中のSVは、配列中の他のSVにより送信されるPNコードと区別できるPNコードで(例えば、GPS中にあるような、各衛星に対して異なるPNコードを使用して、または、Glonass中にあるような、異なる周波数上で同じコードを使用して、)マークされている信号を送信してもよい。ある態様にしたがうと、ここで提示されている技法は、SPSに対するグローバルシステム(例えば、GNSS)に制限されるものではない。例えば、日本上の準天頂衛星システム(QZSS)や、インド上のインド地域航法衛星システム(IRNSS)や、中国上の北斗等のような、さまざまな領域システム中での使用に対して、ここで提供されている技法を適用してもよく、または、そうでなければ、イネーブルしてもよく、ならびに/あるいは、1つ以上のグローバルナビゲーション衛星システムおよび/または領域ナビゲーション衛星システムとともに使用するために関係付けられていてもよい、あるいは、そうでなければ、イネーブルされていてもよい、さまざまな補強システム(例えば、衛星ベースの補強システム(SBAS))中での使用に対して、ここで提供されている技法を適用してもよく、または、そうでなければ、イネーブルしてもよい。これらに限定されないが、例として、SBASは、例えば、ワイドエリア補強システム(WAAS)や、欧州静止衛星ナビゲーションオーバーレイサービス(EGNOS)や、多機能衛星補強システム(MSAS)や、GPS支援地球補強ナビゲーションまたは地球補強ナビゲーションシステム(GAGAN)や、および/または、これらに類するもののような、完全性情報や、微分補正等を提供する補強システムを含んでいてもよい。したがって、ここで使用するように、SPSは、1つ以上の、グローバルのならびに/あるいは領域的な、ナビゲーション衛星システムおよび/または補強システムの何らかの組み合わせを含んでいてもよく、SPS信号は、SPS信号、SPSのような信号、および/または、このような1つ以上のSPSに関係付けられている他の信号を含んでいてもよい。
【0107】
ここで使用するように、端末は、セルラ通信デバイスまたは他のワイヤレス通信デバイスや、パーソナル通信システム(PCS)デバイスや、パーソナルナビゲーションデバイス(PND)や、パーソナル情報マネージャ(PIM)や、パーソナルデジタルアシスタント(PDA)や、ラップトップや、または、ワイヤレス通信および/またはナビゲーション信号を受信することが可能である他の適切な移動体デバイスのような、デバイスのことを指す。用語“端末”はまた、衛星信号受信、支援データ受信、および/または、ポジション関連の処理が、デバイスにおいて起こるか、あるいは、PNDにおいて起こるか否かに関わらず−短距離ワイヤレス接続により、赤外線接続により、ワイヤライン接続により、または、他の接続による等して、パーソナルナビゲーションデバイス(PND)と通信するデバイスを含むように意図されている。また、“端末”は、インターネット、WiFi(登録商標)、フェムトセル、または、他のネットワークを通す等して、サーバと通信することが可能である、ならびに、衛星信号受信、支援データ受信、および/または、ポジション関連の処理が、デバイスにおいて起こるか、サーバにおいて起こるか、または、ネットワークに関係付けられている別のデバイスにおいて起こるか否かに関わらず、サーバと通信することが可能である、ワイヤレス通信デバイス、コンピュータ、ラップトップ等を含むすべてのデバイスを含むように意図されている。上記の何らかの動作可能な組み合わせもまた、“端末”であると考えられる。
【0108】
ここで説明した方法論/インプリメンテーションは、アプリケーションに依存して、さまざまな手段により実現することができる。例えば、これらは、ハードウェアで、ファームウェアで、ソフトウェアで、または、これらの何らかの組み合わせで実現してもよい。ハードウェアを伴うインプリメンテーションのために、プロセッサは、1つ以上の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、汎用プロセッサ、制御装置、マイクロ制御装置、マイクロプロセッサ、状態機械、電子デバイス、ここで説明した機能を実行するように設計された他の電子ユニット、あるいは、例えば、DSPコアを備えた1つ以上のマイクロプロセッサ、複数のマイクロプロセッサ、または、他の何らかの適切なコンフィギュレーションのような、これらの組み合わせで、実現してもよい。
【0109】
ファームウェアおよび/またはソフトウェアを伴うインプリメンテーションのために、ここで説明した機能を実行するモジュール(例えば、手順、関数等)により、方法論を実現してもよい。ここで説明した方法論を実現する際に、命令を明確に具現化する何らかの機械読取可能媒体を使用してもよい。例えば、ファームウェア/ソフトウェアコードは、メモリ中に記憶され、プロセッサ/コンピュータに機能を実行させるために、プロセッサ/コンピュータによって実行されてもよい。メモリは、プロセッサ内で、または、プロセッサの外部で、実現してもよい。ここで使用したような用語“メモリ”は、何らかのタイプのロングタームの、ショートタームの、揮発性の、不揮発性の、または、他のメモリのことを指し、何らかの特定のタイプのメモリまたは多数のメモリに、あるいは、メモリが記憶されている媒体のタイプに限定されない。
【0110】
ファームウェアおよび/またはソフトウェアで実現した場合に、機能は、1つ以上の命令またはコードとして、コンピュータ読取可能媒体上に記憶されてもよい。例は、データ構造によりエンコードされるコンピュータ読取可能媒体と、コンピュータプログラムによりエンコードされるコンピュータ読取可能媒体とを含む。コンピュータ読取可能媒体は、コンピュータプログラムプロダクトの形態を取ってもよい。コンピュータ読取可能媒体は、物理コンピュータ記憶媒体を含む。記憶媒体は、コンピュータによりアクセスできる何らかの利用可能な媒体であってもよい。例として、これらに限定されないが、このようなコンピュータ読取可能媒体は、RAM、ROM、EEPROM、CD−ROMまたは他の光ディスク記憶装置、磁気ディスク記憶装置、半導体記憶装置、または、他の記憶デバイス、あるいは、コンピュータによりアクセスでき、命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用できる他の何らかの媒体を含むことができる;ここで使用したようなディスク(diskおよびdisc)は、コンパクトディスク(CD)、レーザディスク(登録商標)、光ディスク、デジタル多用途ディスク(DVD)、フロッピー(登録商標)ディスク、および、ブルーレイ(登録商標)ディスクを含み、ここで、一般的に、ディスク(disk)は、データを磁気的に再生する一方で、ディスク(disc)は、データをレーザによって光学的に再生する。上記のものを組み合わせたものもまた、コンピュータ読取可能媒体の範囲内に含められるべきである。
【0111】
コンピュータ読取可能媒体上の記憶装置に加えて、通信装置中に備える送信媒体上で、命令および/またはデータが、信号として提供されてもよい。例えば、通信装置は、命令およびデータを示す信号を有するトランシーバを備えていてもよい。命令およびデータは、1つ以上のプロセッサに、特許請求の範囲中に概説している機能を実現させるように構成されている。すなわち、通信装置は、開示した機能を実行するための情報を示す信号を持つ送信媒体を備えている。第1の時間では、通信装置中に備えられている送信媒体は、開示した機能を実行するための情報の第1の部分を含んでいてもよい一方で、第2の時間では、通信装置中に備えられている送信媒体は、開示した機能を実行するための情報の第2の部分を含んでいてもよい。
【0112】
ここでは、参照のために、および、あるセクションを位置付けるのを助けるために、見出しが含まれている。これらの見出しは、説明した概念の範囲をその下に限定するように意図されておらず、これらの概念は、本明細書全体を通して、他のセクションにおける適用可能性を有していてもよい。
【0113】
本開示の以前の説明は、当業者が、本開示を製作または使用できるように提供されている。本開示に対するさまざま改良は当業者に容易に明らかとなり、ここに定義された一般的な原理は、本開示の範囲から逸脱することなく、他のバリエーションに適用されてもよい。したがって、本開示は、ここで説明した例および設計に限定されることを意図しているものではなく、ここで開示した原理および新規の特徴と一致した最も広い範囲に一致させるべきである。
【米国特許法第119条の下での優先権の主張】
【0001】
本特許出願は、“トリガされたロケーションサービス”と題し、2009年2月9日に出願され、その譲受人に譲渡され、参照によりここに明示的に組み込まれている、米国仮特許出願シリアル番号第61/151,089号に対する優先権を主張する。
【背景】
【0002】
I.分野
本開示は、一般的に通信に関し、さらに詳細には、ロケーションサービスをサポートするための技術に関する。
【0003】
II.背景
ワイヤレスネットワーク中の端末の位置を知ることが望ましいことが多く、時に、必要である。用語“ロケーション”と“ポジション”とは同義であり、ここでは、区別なく使用する。例えば、ユーザは、端末を利用して、ウェブサイトをブラウズすることができ、ロケーション依存コンテンツをクリックすることができる。その後、ユーザに対して適切なコンテンツを提供するために、端末のロケーションを決定し、使用してもよい。端末のロケーションを知っていることが有用である、または、必要である他の多くのシナリオがある。
【0004】
端末に対するロケーション情報(例えば、ロケーション推定)を取得して、クライアントエンティティにロケーション情報を送るために、典型的に、(通話フローまたは手順とも呼ぶことがある)メッセージフローが実行される。典型的に、1つ以上のネットワークエンティティと、端末と、クライアントエンティティとの間で、メッセージフローに対するさまざまなメッセージが交換される。これらのメッセージは、端末に対するポジショニングを実行するために、および/または、クライアントエンティティにロケーション情報を配信するために、関係する情報が確実に各エンティティに提供されるようにし、あるいは、各エンティティが別のエンティティからこの情報を確実に取得できるようにする。しかしながら、これらのメッセージは、さまざまなネットワークエンティティにおけるトラフィックを増加させる。付加的なトラフィックは、クライアントエンティティにロケーション情報を周期的に提供するロケーションサービスに対して、特に大きいかもしれない。メッセージはまた、クライアントエンティティにロケーション情報を送るための応答時間を延ばすかもしれない。
【概要】
【0005】
ここでは、トリガされたロケーションサービスをサポートするための技術を説明する。トリガされたロケーションサービスは、トリガイベントが起こったときにはいつでも、ロケーション情報を持つ報告を送ることができるサービスである。異なるトリガされたロケーションサービスに対して、異なる方法でトリガイベントを規定してもよい。
【0006】
トリガされたロケーションサービスをサポートする1つの設計では、端末に対する少なくとも1つのロケーション関連測定値を取得してもよい。各ロケーション関連測定値は、端末が進行した距離に対するもの、または、端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定してもよい。トリガイベントが起こっていた場合に、報告を送ってもよい。
【0007】
1つの設計では、等距離トリガサービスに対しては、少なくとも1つのロケーション測定値は、端末が進行した距離に対するものであってもよく、これは、下記で説明するようにさまざまな方法で決定することができる。端末が進行した距離に基づいて、トリガイベントが起こっているか否かを決定してもよい。例えば、端末が進行した距離が、予め規定された距離を超えている場合に、トリガイベントを宣言してもよい。
【0008】
別の設計では、相対的な端末対端末トリガサービスに対しては、少なくとも1つのロケーション関連測定値は、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。基準端末のロケーションに基づいて、移動する地理的なターゲットエリアを決定してもよい。端末のロケーションが、移動する地理的なターゲットエリアに関する基準に一致する場合に、トリガイベントを宣言してもよい。基準は、移動する地理的なターゲットエリアの内にあるか、移動する地理的なターゲットエリアの外にあるか、移動する地理的なターゲットエリアに入るか、または、移動する地理的なターゲットエリアを離れるかであってもよい。
【0009】
さらに別の設計では、速度トリガサービスに対しては、少なくとも1つのロケーション関連測定値は、端末の速度に対するものであってもよい。端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定してもよい。例えば、端末の速度を周期的に決定してもよく、最後のトリガイベント以降の端末の最高速度を決定してもよい。最高速度が、予め規定された速度を超えている場合に、トリガイベントを宣言してもよい。
【0010】
さらに別の設計では、時間−距離−速度(T−D−V)の組み合わせのトリガサービスに対しては、少なくとも1つのロケーション関連測定値は、端末が進行した距離に対するもの、および、端末の速度に対するものであってもよい。端末が進行した距離や、端末の速度や、および/または、最後のトリガイベント以降に経過した時間に基づいて、トリガイベントが起こっているか否かを決定してもよい。例えば、複数の式を決定してもよい。各式は、予め規定された距離に関する端末が進行した距離に対するもの、または、予め規定された速度に関する端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものであってもよい。複数の式の関数に基づいて、トリガイベントが起こっているか否かを決定してもよい。
【0011】
さらに別の設計では、端末対端末速度サービスに対しては、例えば、ロケーションセンターに対して、第1の端末が、第2の端末の速度に対する要求を送ってもよい。第1の端末は、その後、1回かまたは複数回かのいずれか、(例えば、ロケーションセンターから、または、第2の端末から、)要求に応答した第2の端末の速度を受信してもよい。
【0012】
他のトリガされたロケーションサービスを下記で説明する。本開示のさまざまな態様および特徴もまた、下記でさらに詳細に説明する。
【図面の簡単な説明】
【0013】
【図1】図1は、ロケーションサービスをサポートする例示的な配置である。
【図2】図2は、等距離トリガサービスに対するメッセージフローを示している。
【図3】図3は、等距離トリガサービスに対するメッセージフローを示している。
【図4】図4は、移動する地理的なターゲットエリアを示している。
【図5】図5は、相対的な端末対端末トリガサービスに対するメッセージフローを示している。
【図6】図6は、相対的な端末対端末トリガサービスに対するメッセージフローを示している。
【図7】図7は、速度トリガサービスに対するメッセージフローを示している。
【図8】図8は、T−D−Vの組み合わせのトリガサービスに対するメッセージフローを示している。
【図9】図9は、端末対端末の速度サービスに対するメッセージを示している。
【図10】図10は、トリガされたロケーションサービスをサポートするためのプロセスを示している。
【図11】図11は、端末対端末の速度サービスをサポートするためのプロセスを示している。
【図12】図12は、端末と、ワイヤレスネットワークと、ロケーションサーバとのブロックダイヤグラムを示している。
【詳細な説明】
【0014】
ここでは、トリガされたロケーションサービスをサポートするための技術を説明する。さまざまなワイヤレスネットワークと通信する端末に対して、これらの技術を使用してもよい。用語“ネットワーク”および“システム”は、区別なく使用することが多い。例えば、“第3世代パートナーシッププロジェクト”(3GPP)という名の組織により規定されているワイヤレスネットワークに対して、および、“第3世代パートナーシッププロジェクト2”(3GPP2)という名の組織により規定されているワイヤレスネットワークに対して、これらの技術を使用してもよい。
【0015】
ユーザプレーンロケーションアーキテクチャ/ソリューションと、制御プレーンロケーションアーキテクチャ/ソリューションとに対しても、これらの技術を使用してもよい。ユーザプレーンロケーションアーキテクチャは、ユーザプレーンを通して、ロケーションサービスに対するメッセージを送るロケーションアーキテクチャである。ユーザプレーンは、より高次のレイヤアプリケーションにシグナリングおよびデータを伝えて、ユーザプレーンベアラを用いるメカニズムであり、典型的に、ユーザデータグラムプロトコル(UDP)、送信制御プロトコル(TCP)、および、インターネットプロトコル(IP)のような標準的なプロトコルで実現されている。制御プレーンロケーションアーキテクチャは、制御プレーンを介して、ロケーションサービスにメッセージを送るロケーションアーキテクチャである。制御プレーンは、より高次のレイヤアプリケーションにシグナリングを伝えるメカニズムであり、典型的に、ネットワーク特定プロトコルと、インターフェースと、シグナリングメッセージとで実現されている。ロケーションサービスをサポートするメッセージは、制御プレーンアーキテクチャでは、シグナリングの一部として伝えられ、ユーザプレーンアーキテクチャでは、(ネットワークの見地から)データの一部として伝えられる。しかしながら、メッセージのコンテンツは、ユーザプレーンロケーションアーキテクチャと制御プレーンのロケーションアーキテクチャの双方において、同じであるか、または、類似していてもよい。
【0016】
明確さのために、オープン移動体連合(OMA)からのセキュアユーザプレーンロケーション(SUPL)に対して、技術のある態様を下記で説明する。SUPLは、3GPP、3GPP2、および、WLANのネットワークに適用可能であり、OMAからの公然と入手可能な文書中に記述されている。明確さのために、以下の説明の大部分では、SUPL専門用語を使用する。
【0017】
図1は、ロケーションサービスをサポートする例示的な配置を示している。端末110、端末112、および、端末114は、ワイヤレスネットワーク120と通信して、通信サービスを取得してもよい。端末は、静的なものまたは移動性のものであってもよく、移動局(MS)、ユーザ機器(UE)、アクセス端末(AT)、加入者局、局等としても呼ぶことがある。端末は、セルラ電話機、パーソナルデジタルアシスタント(PDA)、ハンドヘルドデバイス、ワイヤレスデバイス、ラップトップコンピュータ、ワイヤレスモデム、コードレス電話機、遠隔測定デバイス、追跡デバイス等であってもよい。端末は、SUPLでは、SUPLイネーブル端末(SET)として呼ぶことがある。用語“端末”および“SET”は、ここでは、区別なく使用する。
【0018】
ワイヤレスネットワーク120は、ワイヤレスワイドエリアネットワーク(WWAN)や、ワイヤレスメトロポリタンエリアネットワーク(WMAN)や、ワイヤレスローカルエリアネットワーク(WLAN)等であってもよい。WWANは、コード分割多元接続(CDMA)1Xネットワークや、ワイドバンドCDMA(WCDMA)ネットワークや、グローバルシステムフォーモバイルコミュニケーション(GSM(登録商標))ネットワークや、ロングタームエボリューション(LTE)ネットワーク等であってもよい。WMANは、通常、WiMAXとして呼ばれるIEEE802.16を実現してもよい。WLANは、(通常、WiFi(登録商標)として呼ばれる)IEEE802.11や、ハイパーLAN等を実現してもよい。
【0019】
SETは、衛星150のような衛星からの信号を受信して測定し、衛星に対する擬似距離測定値を取得してもよい。衛星は、米国のグローバルポジショニングシステム(GPS)や、欧州のGalileoシステムや、ロシアのGLONASSシステムや、または、他の何らかの衛星ポジショニングシステム(SPS)の一部であってもよく、あるいは、これらのシステムの組み合わせであってもよい。SETに対するロケーション推定を導出するために、衛星の擬似距離測定値と、衛星の既知のロケーションとを使用してもよい。ロケーション推定は、ポジション推定、ポジション確定等としても呼ぶことがある。SETはまた、ワイヤレスネットワーク120内の基地局から信号を受信して測定し、基地局に対するタイミングおよび/または信号強度測定値を取得してもよい。SETに対するロケーション推定を導出するために、基地局のタイミングおよび/または信号強度測定値と、基地局の既知のロケーションとを使用してもよい。一般に、衛星、基地局、擬似衛星、および/または、他の送信機に対する測定に基づいて、ならびに、ポジショニング方法のうちの1つまたはポジショニング方法を組み合わせたものを使用して、ロケーション推定を導出できる。
【0020】
ホームSUPLロケーションプラットフォーム(H−SLP)130は、SETに対するロケーションサービスをサポートするために、SETと通信してもよい。ロケーションサービスは、ロケーション情報に基づいている、または、ロケーション情報に関連している、何らかのサービスを含んでいてもよい。ロケーションサービスは、SETに対する地理的なロケーション推定を、または、SETに対するシビルロケーション推定を決定するためのプロセスである、ポジショニングを含んでいてもよい。ポジショニングは、(i)緯度、経度、および、場合によっては高度の座標、ならびに、地理的なロケーション推定に対する不確実性を提供するか、あるいは、(ii)シビルロケーション推定に対するストリートアドレスを提供してもよい。ポジショニングはまた、速度および/または他の情報を提供してもよい。H−SLP130は、SUPLロケーションセンター(SLC)132と、SUPLポジショニングセンター(SPC)134とを含んでいてもよい。SLC132は、ロケーションサービスをサポートし、SUPLの動作を調整し、ユーザプレーンベアラを通してSETと対話してもよい。SLC132は、プライバシー、入会、セキュリティ、ローミングサポート、課金/請求、サービス管理、ロケーション算出等に対する機能を実行してもよい。SPC134は、SETに対するポジショニングと、SETへの支援データの配信とをサポートしてもよく、また、ロケーション算出のために使用されるメッセージおよび手順を担ってもよい。SPC134は、セキュリティ、支援データ配信、参照検索、ロケーション算出等に対する機能を実行してもよい。
【0021】
SUPLエージェント140は、ロケーションクライアントであってもよく、(例えば、直接、または、1つ以上のネットワークを通して、)H−SLP130と通信して、ターゲットSETに対するロケーション情報を取得してもよい。ターゲットSETは、そのSETに対するロケーション情報が、SUPLエージェントにより探されているSETである。ロケーション情報は、ロケーション推定を、ならびに/あるいは、ロケーションまたは速度に関連する何らかの情報を含んでもよい。SET120はまた、SET内に存在しているSUPLエージェントを有してもよい。例えば、SET114は、SET内に、SUPLエージェント144を有している。
【0022】
SETは、ポジション決定が可能であってもよく、ネットワークからの支援により、または、ネットワークからの支援なしに、そのロケーションを決定することができる。SETベースモードに対しては、場合によってはSPCからの支援データにより、SETのロケーションをSETにより決定することができる。SET支援モードに対しては、SETからの支援(例えば、測定値)により、SETのロケーションをSPCにより決定することができる。SETは、自律GPS、支援GPS(A−GPS)、アドバンストフォワードリンクトライラテレーション(A−FLT)、強化観測時間差(EOTD)、観測到達時間差(OTDOA)、ハイブリッド等のような、1つ以上のポジショニング方法をサポートしていてもよい。簡潔さのために、用語“GPS”は、GPS、Galileo、GLONASS等のような、何らかのSPSのことを指すことができる。自律GPS方法およびA−GPS方法は、衛星測定値のみに基づいて、SETに対するロケーション推定を提供することができ、高い精度を有している。ハイブリッド方法は、衛星測定値と基地局測定値の双方に基づいて、ロケーション推定を提供することができ、高い精度および高い信頼性を有している。A−FLT方法、EOTD方法、および、OTDOA方法は、SETにより行われた、基地局のタイミング測定に基づいて、ロケーション推定を提供することができ、良好な精度を有している。SETは、他のポジショニング方法もサポートすることができる。
【0023】
ある態様において、さまざまなトリガされたロケーションサービスがサポートされていてもよい。トリガされたロケーションサービスは、トリガイベントが起こったときにはいつでも、ターゲットSETに対するロケーション情報をSUPLエージェントに対して提供することができる。異なるトリガされたロケーションサービスは、異なるタイプのトリガに関係付けられていてもよい。表1は、いくつかのトリガされたロケーションサービスをリストアップしており、各トリガされたロケーションサービスの短い説明を提供している。他のタイプのトリガに基づいて、他のトリガされたロケーションサービスもサポートすることができる。表1中のトリガされたロケーションサービスを、下記でさらに詳細に説明する。
【表1】
【0024】
等距離トリガサービスは、ターゲットSETのロケーションを周期的に決定し、ターゲットSETが、予め規定された距離を移動したときに、ロケーション情報を報告してもよい。距離は、(i)SETの現在のロケーションと、距離監視が開始したときのその最初のロケーションとの間の直線距離、または、(ii)その最初のロケーションを離れて以来、SETがたどった、典型的に非線形のパスの全距離、または、(iii)他の何らかの方法で規定されている距離のことを指してもよい。SUPLエージェントは、等距離トリガサービスを開始し、ターゲットSETを識別し、適用可能なパラメータを提供してもよい。
【0025】
等距離トリガサービスを使用して、移動体端末(例えば、SET110)を周期的に監視し、端末が、予め規定された距離を進行したときにはいつでも、第三者(例えば、SUPLエージェント140)に通知を送ってもよい。例えば、運送会社のオペレーションセンターは、16キロメートル(10マイル)進行したごとの後に、その車隊中のトラックのロケーションを知りたいと思っているかもしれない。第三者(例えば、オペレーションセンター)は、ロケーションサーバ(例えば、H−SLP130)にロケーション要求を送ってもよい。(ポジション決定可能であってもよい)端末と協調しているロケーションサーバは、予め規定された距離だけ端末が移動したか否かの検出が可能であるポジション決定手順を開始してもよい。このイベントが起こったときにはいつでも、ロケーションサーバは、ロケーションクライアントに通知してもよい。
【0026】
図2は、等距離トリガサービスに対するメッセージフロー200の設計を示している。SUPLエージェント140は、ターゲットSET110が、最後に報告されたロケーションから、予め規定された距離を移動したときにはいつでも、知ることを望んでいるかもしれず、等距離トリガの表示を持つロケーション要求をH−SLP130に対して送ってもよい(ステップA)。H−SLP130は、その後、ターゲットSETと通信して、等距離トリガセッションを確立してもよい(ステップB)。
【0027】
SETベースモードまたはSET支援モードを使用して、SET110のロケーションを周期的に決定してもよい。SETベースモードに対しては、SET110は、自律的に測定を行い、そのロケーションを決定する。SET110は、必要なときにはいつでも、H−SLP130と通信して、支援データを取得することができる。SET支援モードに対しては、SET110は、H−SLP130とのポジショニングセッションに携わってもよく、H−SLP130は、SET110からの測定値に基づいて、ロケーション推定を算出してもよい。一般に、SET110のロケーションは、SET110のみにより、H−SLP130からの支援とともにSET110により、SET110からの支援とともにH−SLP130による等して、決定してもよい。さらに、トリガ条件の評価は、SET110またはH−SLP130のいずれかにより実行することができる。
【0028】
等距離トリガセッションの開始時にSET110のロケーションを決定して、最初のロケーションとして使用してもよい。等距離トリガセッションの間に、SET110のロケーションを周期的に決定することもできる。1つの設計では、X秒ごとに、SET110のロケーションを決定してもよく、ここで、Xは、何らかの適切な値であってもよく、トリガパラメータにより特定されていてもよい。別の設計では、可能な限り頻繁に、SET110のロケーションを決定してもよい。さらに別の設計では、SET110の推定速度と、予め規定された距離とに基づいて、SETのロケーションを把握し、時に、決定してもよい。したがって、より速い速度、および/または、より短い予め規定された距離に対しては、より短い間隔で、SET110のロケーションを決定してもよく、逆もまた同じである。さらに別の設計では、SET110の動きを検出することができるセンサーに基づいて、SET110のロケーションを決定してもよい。例えば、SET110が移動している間にSET110のロケーションを決定し、SET110が静止している間には中断してもよい。SET110のロケーションはまた、線形加速を検出して取得するセンサーや、方向の変化を検出して取得するセンサー等のような、センサーを使用して、以前のロケーションに関して決定してもよい。SET110のロケーションはまた、他の方法で周期的に決定してもよい。
【0029】
SET110のロケーションを決定してもよく(ステップC)、SETが進行した距離を更新してもよい(ステップD)。進行した距離は、さまざまな方法で決定することができる。1つの設計では、進行した距離は、SET110に対する、最後の報告以降の連続するロケーション間の増分距離を累積することにより取得した、総距離であってもよい。この設計では、SET110は、(i)その現在のロケーションと、最後のロケーションとの間の増分距離を決定し、(ii)最後のロケーションに対して累積された距離と、この増分距離とを合計して、現在のロケーションに対する累積された距離を取得してもよい。別の設計では、進行した距離は、現在のロケーションと、最後の報告のロケーションとの間の距離であってもよく、最後の報告のロケーションは、報告が何ら送られていない場合には、最初のロケーションであるかもしれない。さらに別の設計では、進行した距離は、例えば、特定のルートに沿った距離であってもよく、例えば、最初のロケーションから目的地のロケーションまでの通った道筋に沿った距離、または、より複雑なルートに沿った距離であってもよい。進行した距離はまた、他の方法で決定してもよい。
【0030】
1つの設計では、SET110が、トリガイベントをチェックして、報告を開始してもよい。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行するために、および、報告を開始するために、何らかの適切なエンティティが指定されている。指定されたエンティティには、SET110のロケーション、トリガパラメータ、および/または、他の関係する情報が提供される。明確さのために、下記の説明の大部分では、SET110が、指定されたエンティティであると仮定する。
【0031】
SET110は、SET110が進行した距離と、予め規定された距離とに基づいて、トリガイベントが起こっているか否かをチェックしてもよい(ステップE)。進行した距離が、予め規定された距離を超えている場合に、トリガイベントが起こる。このケースでは、SET110は、トリガイベントが起こったことをH−SLP130に報告してもよい(ステップF)。報告は、SET110の現在のロケーションや、SET110が進行した距離や、および/または、他の情報も含んでいてもよい。その後、H−SLP130は、トリガイベントが起こったことをSUPLエージェント140に知らせるために、トリガ応答を送ってもよい(ステップG)。応答は、SET110からのトリガ報告中に提供されている情報のうちのいくつかまたはすべてを含んでいてもよい。トリガイベントが起こっていない場合には、ステップFとステップGはスキップしてもよい。
【0032】
ステップCないしステップGは、1つの処理サイクルに対するものであってもよい。同様の方法で、付加的な処理サイクルを実行してもよい(ステップH)。各処理サイクルは、SET110の現在のロケーションを決定するためのステップと、SET110が進行した距離を決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、SET110によるトリガイベント報告と、H−SLP130によるトリガ応答とを開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したときや、予め規定された最後の通過点に達したとき等に、等距離トリガセッションの終わりに達する。等距離トリガセッションの終わりに達したときに、H−SLP130とSET110は、セッションを終了してもよい(ステップI)。
【0033】
図3は、SUPLメッセージを使用する、等距離トリガサービスに対するメッセージフロー300の設計を示している。SUPLエージェント140は、SET110が、SET110の最後に報告されたロケーションから特定の距離を移動したときにはいつでも、知ることを望んでいるかもしれない。SUPLエージェント140は、移動体ロケーションプロトコルトリガされたロケーション応答要求(MLP TLRR)メッセージをH−SLP130に対して送ってもよく、H−SLP130は、SUPLエージェント140が関係付けられているH−SLPであってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント140に対するクライアント識別子(ID)(クライアント−id)や、ターゲットSET110に対する移動局識別子(ms−id)や、等距離トリガサービスが要求されているという表示や、トリガパラメータ(例えば、予め規定された距離、開始時間、停止時間等)等を含んでいてもよい。トリガパラメータを使用して、ターゲットSET110による報告に対するトリガイベントを決定してもよい。
【0034】
H−SLP130は、SUPLエージェント140を認証し、クライアントIDに基づいて、要求されたロケーションサービスに対してSUPLエージェントが認可されているかどうかをチェックしてもよい。H−SLP130はまた、移動局IDに基づいて、SUPLエージェント140に対する加入者プライバシーを適用してもよい。プライバシーチェックに対しては、SET110に対するロケーション情報を要求することが、SUPLエージェント140に、または、このタイプのSUPLエージェントに許可されているかどうかを、ならびに、SET110にこの要求が通知される必要があり、この要求を受諾または拒絶することがSET110に許容されているか否かを、H−SLP130が検証してもよい。H−SLP130は、プライバシーを保証するために、SET110のユーザの承諾によってのみ、等距離トリガサービスを実行することができる。等距離トリガサービスはまた、SETユーザのプライバシー設定の修正を動的に考慮してもよい。
【0035】
その後、H−SLP130は、SET110をルックアップし、SET110が現在ローミングしていることを検証し、また、SET110がSUPLをサポートしていることを検証してもよい(ステップB)。H−SLP130は、SET110に対するルーティング情報を取得し、ルーティング情報を使用して、SET110にメッセージを送ってもよい(同様に、ステップB)。H−SLP130は、等距離トリガサービスに対するSUPL/ロケーションセッションを開始するために、SET110に対してSUPL INITメッセージを送ってもよい(ステップC)。SUPL INITメッセージは、セッションID(セッション−id)や、等距離トリガサービスインジケータや、提案されたポジショニング方法(ポジ方法)や、および/または、他の情報を含んでいてもよい。セッションIDを使用して、SUPLセッションを識別することができる。
【0036】
SET110は、H−SLP130からSUPL INITメッセージを受信してもよく、SET110がもう既に接続していない場合には、それ自体をデータネットワークに接続するか、または、データ接続を確立してもよい(ステップD)。SET110は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET110は、H−SLP130との等距離トリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい。このメッセージは、セッションIDや、SET110の能力等を含んでいてもよい。SET能力は、SET110によりサポートされているポジショニング方法や、SET110によりサポートされているポジショニングプロトコル(例えば、3GPPにおける無線リソースLCSプロトコル(RRLP)や、3GPPにおける無線リソース制御(RRC)や、LTEポジショニングプロトコル(LPP)や、TIA−801等)や、および/または、他の情報を含んでいてもよい。
【0037】
H−SLP130は、SUPL TRIGGERED STARTメッセージを受信してもよく、受信したメッセージ中に含まれているSET能力を考慮することにより、等距離トリガセッションに対して使用するためのポジショニング方法を選択してもよい。その後、H−SLP130は、セッションIDや、選択したポジショニング方法(ポジ方法)や、トリガパラメータ等を含んでいてもよいSUPL TRIGGERED RESPONSEメッセージを、SET110に対して送ってもよい(ステップF)。SET110およびH−SLP130は、ステップFの後に、セキュアIP接続を解放してもよい。H−SLP130は、等距離トリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLPトリガされたロケーション報告返答(TLRA)メッセージを送ってもよい(ステップG)。
【0038】
ステップAないしステップGは、等距離トリガセッションに対するセットアップステップである。ステップAにおいてSUPLエージェント140により提供され、ステップFにおいてSET110に送られたトリガパラメータにしたがって、SET110に対するロケーション情報を、その後に報告してもよい。
【0039】
SET110は、SETベースモードにおいて支援データを取得するために、または、SET支援モードにおいてSET110のロケーションを決定するために、H−SLP130とのポジショニングセッションに携わってもよい。SET110は、H−SLP130とのポジショニングセッションを開始するために、SUPL POS INITメッセージを送ってもよい(ステップH)。このメッセージは、セッションIDや、ロケーションID(lid)や、SET能力や、支援データに対する要求や、および/または、他の情報を含んでいてもよい。その後、H−SLP130は、SET110とともにSUPL POSセッション(または、ポジショニングセッション)に携わってもよい(ステップI)。H−SLP130およびSET110は、SET110に支援データを提供するために、ならびに/あるいは、SET110に対するロケーション推定を算出するために、選択したポジショニングプロトコル(例えば、RRLP、RRC、LPP、または、TIA−801)に対してメッセージを交換する。H−SLP130は、SET110に対して、SUPL REPORTメッセージ中で、ロケーション推定および/または他の情報を送ってもよい(ステップJ)。
【0040】
SET110のロケーションは、SET110単独により、あるいは、ステップH、ステップI、および、ステップJを通して、H−SLP130の支援とともに、決定してもよい(ステップK)。例えば、進行した距離を算出するために、上記で説明したスキームのうちの何らかのものを使用して、SET110が進行した距離を更新してもよい(ステップL)。SET110は、予め規定された距離に対して、進行した距離を比較し、予め規定された距離だけSET110が移動したか否かを決定してもよい(ステップM)。予め規定された距離だけSET110が移動しており、トリガイベントが起こっている場合に、SET110は、H−SLP130に対してSUPL REPORTメッセージを送ってもよい(ステップN)。このメッセージは、トリガイベントが起こっているという表示を含んでいてもよく、SET110の現在のロケーションや、SET110が進行した距離や、および/または、他の情報も含んでいてもよい。トリガイベントに応答して、H−SLP130は、SUPLエージェント140に対してMLPトリガされたロケーション報告(TLREP)メッセージを送ってもよい(ステップO)。このメッセージは、要求IDや、トリガイベントが起こっているという表示や、SET110の現在のロケーションや、SET110が進行した距離や、現在のロケーションに対する日付および時間や、現在のロケーションを決定するために使用されたポジショニング方法や、および/または、他の情報を含んでいてもよい。トリガイベントが起こっていない場合には、ステップNとステップOはスキップしてもよい。
【0041】
ステップKないしステップOは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップP)。各処理サイクルは、SET110の現在のロケーションを決定するためのステップと、SET110が進行した距離を決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、報告を開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したときや、予め規定された最後の通過点に達したとき等に、等距離トリガセッションの終わりに達する。等距離トリガセッションの終わりに達したときに、H−SLP130とSET110は、セッションを終了してもよい。H−SLP130は、SET110に対してSUPL ENDメッセージを送ってもよく(ステップQ)、または、(図3には示されていないが、)SET110は、H−SLP130に対してSUPL ENDメッセージを送ってもよい。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。代替的に、各エンティティは、セッションの終わりを自律的に決定してもよく、何らかのシグナリングを交換することなく、セッションを終了してもよい。
【0042】
相対的なSET対SETトリガサービスは、ターゲットSETのロケーションと、基準SETのロケーションとを周期的に決定してもよく、基準SETロケーションを中心とした、移動する地理的なターゲットエリアにターゲットSETが入ったときに、または、基準SETロケーションを中心とした、移動する地理的なターゲットエリアをターゲットSETが離れたときに、ロケーション情報を報告してもよい。SUPLエージェントは、相対的なSET対SETトリガサービスを開始し、ターゲットSETおよび基準SETを識別し、適用可能なパラメータを提供してもよい。
【0043】
図4は、相対的なSET対SETトリガサービスに対する地理的なターゲットエリア410を示している。地理的なターゲットエリアは、基準SETのロケーションを中心としていてもよく、基準SETロケーションからのrの半径により規定された円形のエリアであってもよい。地理的なターゲットエリアは、基準SETのロケーションと同期して、移動する。一般に、地理的なターゲットエリアは、例えば、さらに複雑な多角形のような、何らかの形により規定されていてもよい。地理的なターゲットエリアはまた、(i)2次元で、水平的なロケーションにより規定されていてもよく、(ii)3次元で、水平的なロケーションと高度の双方によって規定されていてもよい。
【0044】
例えば、母親と子供が、ショッピングモールにいるかもしれない。母親は、彼女の周囲の半径27.42メートル(30ヤード)のエリアの外に子供が移動したときにはいつでも、通知してほしいと思っているかもしれず、これは、“迷子”シナリオとして呼ぶことがある。母親が基準端末を持ち運んでいてもよく、子供がターゲット端末を持ち運んでいてもよい。地理的なターゲットエリアは、母親のロケーションを中心とした、半径rによる円形のエリアとして規定されていてもよい。地理的なターゲットエリアは、母親の移動にしたがう、すなわち、母親とともにあちこち動き回る。子供(または、ターゲット端末)が、母親の周囲の地理的なターゲットエリアを離れたときにはいつでも(例えば、子供が、母親から27.42メートル(30ヤード)より遠くに移動したときに)、SUPLエージェントに通知してもよい。その後、SUPLエージェントは、子供が地理的なターゲットエリアを離れたこと、例えば、子供が迷子になっていることを母親に通知してもよい。母親がターゲット端末を持ち運び、子供が基準端末を持ち運んでいるような、端末の役割が逆であるときにも、この例をサポートすることができる。
【0045】
図5は、相対的なSET対SETトリガサービスに対するメッセージフロー500の設計を示している。SUPLエージェント140は、基準SET112のロケーションにより規定されている、移動する地理的なターゲットエリアに関するターゲットSET110のロケーションを知ることを望んでいるかもしれず、相対的なSET対SETトリガの表示を持つロケーション要求をH−SLP130に送ってもよい(ステップA)。その後、H−SLP130は、ターゲットUE110および基準SET112と通信して、相対的なSET対SETトリガセッションを確立してもよい(ステップBおよびステップC)。
【0046】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行するために、および、報告を開始するために、何らかのエンティティが指定されている。指定されたエンティティには、SET110およびSET112のロケーション、トリガパラメータ、および/または、他の関係する情報が提供される。明確さのために、下記の説明の大部分では、ターゲットSET110が、指定されたエンティティであると仮定する。
【0047】
基準SET112のロケーションは、SETベースモードにより、または、SET支援モードにより、決定してもよい(ステップD)。基準SET112のロケーションは、H−SLP130に提供されてもよく(ステップE)、H−SLP130は、ターゲットSET110に対してロケーションを転送してもよい(ステップF)。代替的に、(図5中で破線により示されているように、)基準SET112のロケーションは、H−SLP130を通すことなく、基準SET112により直接、ターゲットSET110に対して提供されてもよい。
【0048】
SETベースモードにより、または、SET支援モードにより、ターゲットSET110のロケーションをまた決定してもよい(ステップG)。ターゲットSET110は、SET110およびSET112のロケーションと、地理的なターゲットエリアを規定しているトリガパラメータとに基づいて、トリガイベントが起こったか否かをチェックしてもよい(ステップH)。ターゲットSET110が、地理的なターゲットエリアの内にあるかまたは外にある場合に、あるいは、ターゲットSET110が、地理的なターゲットエリアの内に移動するかまたは外に移動した場合に、トリガイベントが起こるかもしれない。このケースでは、ターゲットSET110は、トリガイベントが起こったことをH−SLP130に報告してもよい(ステップI)。報告は、ターゲットSET110の現在のロケーションや、基準SET112の現在のロケーションや、基準SET112に関するターゲットSET110のロケーション(例えば、50メートル東)や、および/または、他の情報を含んでいてもよい。その後、H−SLP130は、トリガイベントが起こったことをSUPLエージェント140に知らせるために、トリガ応答を送ってもよい(ステップJ)。応答は、SET110からのトリガ報告中に提供されている情報のうちのいくつかまたはすべてを含んでいてもよい。トリガイベントが起こっていない場合には、ステップIとステップJはスキップしてもよい。
【0049】
ステップDないしステップJは、1つの処理サイクルに対するものであってもよい。同様の方法で、付加的な処理サイクルを実行してもよい(ステップK)。各処理サイクルは、基準SET112の現在のロケーションを決定するためのステップと、ターゲットSET110の現在のロケーションを決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。基準SET112のロケーションは、ターゲットSET110のロケーションと同じレートまたは異なるレートにおいて決定してもよい。トリガイベントが起こった場合に、ターゲットSET110によるトリガイベント報告と、H−SLP130によるトリガ応答とを開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したとき等に、相対的なSET対SETトリガセッションの終わりに達する。セッションの終わりに達したときに、H−SLP130とSET110およびSET112とは、セッションを終了する(ステップLおよびステップM)。
【0050】
別の設計では、図5中のステップDおよびステップGにおいて、基準SETのロケーションとターゲットSETのロケーションを取得する代わりに、いずれかのSETが、他のSETに関する自身のロケーションを、これらのステップにおいて周期的に決定してもよい。例えば、ステップGにおいて、ターゲットSET110は、基準SET112に直接、信号(例えば、無線信号または赤外線信号)を送ってもよく、基準SET112は、SET110に対して応答信号を戻してもよい。SET110は、全体的な応答時間を測定し、SET112における内部遅延を減算する。SET112が、SET110へのその応答信号中に、SET112における内部遅延を含めてもよく、または、SET110が、他の手段により、SET112における内部遅延を決定してもよい。SET110は、往復信号伝播遅延を取得し、したがって、それ自体とSET112との間の距離を取得してもよい。その後、この距離を使用して、トリガ条件を評価することができる。さらに別の設計では、ステップDおよびGにおいて、SET110とSET112の双方の最初のロケーションを取得し、これらの最初のロケーションに関する各SETのロケーションを使用して、後続するロケーションを取得してもよい。相対的なロケーションはまた、各SET中のセンサーを使用して、取得してもよい。相対的なロケーションは、取得するために、より少ないシグナリングと処理リソースとを必要とするかもしれないし、短い間隔において、相対的なロケーションを取得できるかもしれない。
【0051】
図6は、SUPLメッセージを使用する、相対的なSET対SETトリガサービスに対するメッセージフロー600の設計を示している。SUPLエージェント140は、基準SET112のロケーションにより規定されている、移動する地理的なターゲットエリアに関するターゲットSET110のロケーションを知ることを望んでいるかもしれず、H−SLP130に対してMLP TLRRメッセージを送ってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント識別子(クライアント−id)や、ターゲットSET110識別子(ターゲットms−id)や、基準SET識別子(基準ms−id)や、相対的なSET対SETトリガサービスが要求されているという表示や、トリガパラメータ等を含んでいてもよい。トリガパラメータは、基準SETの周囲の地理的なターゲットエリアに関する情報(例えば、半径r)や、トリガイベント情報(例えば、ターゲットエリアの中にある、ターゲットエリアの外にある、ターゲットに入る、または、ターゲットエリアを離れる)や、セッション持続時間(例えば、開始時間、停止時間等)や、ならびに/あるいは、報告に対するトリガイベントを決定するのに使用することができる他の情報を含んでいてもよい。
【0052】
H−SLP130は、相対的なSET対SETトリガサービスに対して、SUPLエージェント140を認証および認可してもよい。H−SLP130はまた、SET110とSET112との通知および/または検証を実行してもよい。例えば、H−SLP130は、基準SET112のユーザから承認を取得して、基準SET112のロケーションを決定することが可能になり、場合によっては、ターゲットSET110、H−SLP130、および/または、SUPLエージェント140により、基準SET112のロケーションを共有することが可能になる。H−SLP130はまた、ターゲットSET110のユーザから承認を取得して、ターゲットSET110のロケーションを決定することが可能になり、場合によっては、基準SET112、H−SLP130、および/または、SUPLエージェント140により、共有することが可能になる。相対的なSET対SETトリガサービスはまた、各SETユーザのプライバシー設定の修正を動的に考慮にしてもよい。
【0053】
H−SLP130は、SET110およびSET112をルックアップし、これらのSETに対するルーティング情報を取得してもよい(ステップB)。H−SLP130は、相対的なSET対SETトリガサービスに対するSUPLセッションを開始するために、基準SET112に対してSUPL INITメッセージを送ってもよい(ステップC)。SET112は、SUPL INITメッセージを受信してもよく、それ自体を接続するか、または、データ接続を確立してもよい(ステップD)。SET112は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET112は、H−SLP130との相対的なSET対SETトリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい(ステップE)。H−SLP130は、SET112からSUPL TRIGGERED STARTメッセージを受信してもよく、SET112に対して使用するためのポジショニング方法を選択してもよい。その後、H−SLP130は、セッションIDや、選択したポジショニング方法や、トリガパラメータ等を含むSUPL TRIGGERED RESPONSEメッセージを、SET112に対して送ってもよい(ステップF)。H−SLP130は、ターゲットSET110に対して同様に、ステップCないしステップFを実行してもよい(ステップG)。H−SLP130は、相対的なSET対SETトリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLP TLRAメッセージを送ってもよい(ステップH)。
【0054】
その後に、H−SLP130と、ターゲットSET110と、基準SET112が協調して、トリガイベントの発生を検出してもよい。セッションの間に、各SET110のロケーションを周期的に(例えば、X秒ごとに)決定してもよい。1つの設計では、SETは、そのロケーションを自律的に測定して、決定してもよい。別の設計では、SETは、そのロケーションを決定するために、H−SLP130とのポジショニングセッションに携わってもよい。一般に、各SETのロケーションは、そのSETのみにより、H−SLP130からの支援とともにSETにより、SETからの支援とともにH−SLP130による等して、決定してもよい。基準SET112は、H−SLP130から支援データを取得するために、または、SET支援モードに対してそのロケーションを決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。同様に、ターゲットSET110は、H−SLP130から支援データを取得するために、または、SET支援モードに対してそのロケーションを決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。ステップI、ステップJ、および、ステップKは、それぞれ、図3において、ステップH、ステップI、および、ステップJに対して上記で説明したように、実行してもよい。
【0055】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。さらに別の設計では、基準SET112が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行して、報告を開始するために、何らかのエンティティまたはエンティティの何らかの組み合わせが指定されている。指定されたエンティティには、SET110およびSET112のロケーションと、トリガパラメータとが提供される。明確さのために、下記の説明では、ターゲットSET110が、トリガイベントをチェックして、報告を開始すると仮定する。
【0056】
基準SET112が、そのロケーションを決定してもよく(ステップL)、その現在のロケーションを持つSUPL REPORTメッセージをH−SLP130に対して送ってもよい(ステップM)。プルメカニズムに対しては、基準SETの現在のロケーションを要求するために、ターゲットSET110が、H−SLP130に対してSUPL POSITION REQUESTメッセージを送ってもよい(ステップN)。応答して、H−SLP130は、基準SET112の現在のロケーションを、SUPL REPORTメッセージ中で、ターゲットSET110に転送してもよい(ステップO)。プルメカニズムにより、ターゲットSET110が、その都合のよいときに、例えば、ターゲットSET110がオープンな接続を有しているときに、ロケーション情報を要求することが可能になるかもしれない。プッシュメカニズムに対しては、H−SLP130が、SET112から基準SET112のロケーションを受信したときにはいつでも、H−SLP130は、基準SET112のロケーションを転送してもよい。このケースでは、ステップOは起こるだろうが、ステップNはスキップしてもよい。プッシュメカニズムにより、ターゲットSET110が基準SETロケーションを周期的に要求する必要性なく、基準SETロケーションが入手可能なときにはいつでも、H−SLP130が基準SETロケーションを提供することが可能になるかもしれない。基準SET112はまた、H−SLP130と対話することなく、その現在のロケーションをターゲットSET110に直接送ってもよい。
【0057】
ターゲットSET110が、そのロケーションを決定してもよい(ステップP)。ターゲットSET110は、基準SET112の現在のロケーションに対して、その現在のロケーションを比較してもよく、ターゲットSET110が、基準SET112の現在のロケーションにより規定されている地理的なターゲットエリアの内にあるか、または、外にあるか、あるいは、基準SET112の現在のロケーションにより規定されている地理的なターゲットエリアの内に移動しているか、または、基準SET112の現在のロケーションにより規定されている地理的なターゲットエリアから外に移動しているか否かを決定してもよい(ステップQ)。トリガイベントが起こった場合に、ターゲットSET110は、イベントトリガの表示と、場合によっては、その現在のロケーションおよび/または基準SET112のロケーションとを持つSUPL REPORTメッセージを、H−SLP130に対して送ってもよい(ステップR)。その後、H−SLP130は、要求IDと、イベントトリガ表示と、場合によっては、他の情報とを含んでいてもよいMLP TLREPメッセージを、SUPLエージェント140に対して送ってもよく、他の情報は、ターゲットSET110のロケーションや、基準SET112のロケーションや、各ロケーションに対する日付および時間や、各ロケーションを決定するために使用したポジショニング方法や、ならびに/あるいは、他の情報のようなものである(ステップS)。ターゲットSET110には、例えば、ターゲットSET110によりトリガされる、基準SET112のロケーションに関するトリガイベントが知らされてもよい。基準SET112にはまた、例えば、ターゲットSET110によりトリガされる、それ自体のポジションに関するトリガイベントが知らされてもよい。
【0058】
ステップLないしステップSは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップT)。各処理サイクルは、各SETの現在のロケーションを決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、(例えば、ステップRおよびステップSにおいて)報告を開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したとき等に、相対的なSET対SETトリガセッションの終わりに達する。セッションの終わりに達したときに、H−SLP130と、ターゲットSET110と、基準SET112とが、セッションを終了してもよい。H−SLP130が、各SETに対してSUPL ENDメッセージを送ってもよい(ステップUおよびステップV)。SETがまた、SUPL ENDメッセージを送ってもよい。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。
【0059】
相対的なSET対SETトリガサービスを使用して、その中心が基準端末である地理的なターゲットエリアに関連して、ターゲット端末の移動を周期的に監視することができる。地理的なターゲットエリアは、基準端末(および、他のトリガサービスのケースのように、ターゲット端末でないもの)に関して規定されていてもよく、基準端末と同期して移動する。ターゲット端末が地理的なターゲットエリアの内または外にあるときや、ターゲット端末が地理的なターゲットエリアに入るかまたは離れるときにはいつでも、第三者(例えば、SUPLエージェント140)に通知が送られてもよい。第三者は、ロケーションサーバ(例えば、H−SLP130)に対してロケーション要求を送ってもよい。ロケーションサーバは、ターゲット端末と基準端末の双方とともにポジション決定手順を始めてもよい。ターゲット端末が、基準端末の周囲の地理的なターゲットエリアの内または外にあるか、基準端末の周囲の地理的なターゲットエリアに入るかまたは離れるかを検出できるように、基準端末のロケーションを周期的に決定し、ターゲット端末のロケーションと比較してもよい。このトリガイベントが検出されたときにはいつでも、ロケーションサーバは、ローカルクライアントと、場合によっては、ターゲット端末および/または基準端末とに通知してもよい。
【0060】
速度トリガサービスは、ターゲットSETの速度が、予め規定された速度(すなわち、速度レベル)に達したか否かを周期的に決定してもよく、トリガイベントが検出されたときに、速度を報告してもよい。SUPLエージェントは、速度トリガサービスを開始し、ターゲットSETを識別し、適用可能なパラメータを提供してもよい。
【0061】
速度は、スピードおよび/または方位を含んでいてもよい。スピードは、SETがどのくらい速く移動しているかを示すことができ、方位は、SETがどの方向に移動しているかを示すことができる。一般に、トリガ基準は、スピードのみに基づいて、または、方位のみに基づいて、あるいは、スピードと方位の双方に基づいて、規定されていてもよい。例えば、トリガ基準は、(i)トラックが112km/h(70mph)のスピードに達したときに、または、(ii)トラックが北に向かっているときに、あるいは、(iii)トラックが、112km/h(70mph)より速く、北に向かっているときに、報告を送るように規定されていてもよい。トリガ基準はまた、スピードの増加および/または減少に対して規定されていてもよい。例えば、(停止信号から開始して)トラックが112km/h(70mph)に達したときに、報告を送ってもよい。トラックはさらに加速して、144km/h(90mph)に達するかもしれない。トラックが112km/h(70mph)に減速したときに、別の報告を送ってもよい。代替的に、トラックがより低いレベル(例えば、104km/h(65mph))を下回って減速し、その後、112km/h(70mph)を超えた場合に、別の報告を送ってもよい。一般に、速度トリガサービスに対して使用される速度は、スピードのみのことを指してもよく、または、方位のみのことを指してもよく、あるいは、スピードと方位の双方のことを指してもよい。さまざまな速度トリガサービスに対して、さまざまなトリガ基準をまた使用してもよい。
【0062】
速度トリガは、さまざまな方法で規定されていてもよい。1つの設計では、初めに、ターゲットSETの速度が、より低いレベルを下回って落ちて、その後に、予め規定された速度を満たすかまたは超えたときに、速度トリガが起こるかもしれない。予め規定された速度に基づいて、より低いレベルを規定してもよい、例えば、より低いレベルは、予め規定された速度を下回るあるマージンであってもよい。例えば、トラックが交通信号において開始し、その後に、112km/h(70mph)の予め規定された速度に達することがあり、112km/h(70mph)の予め規定された速度は、104km/h(65mph)のスピード制限プラス8km/h(5mph)のマージンに基づいて、規定されているかもしれない。トラックが初めに112km/h(70mph)に達したときに、速度トリガが生じるかもしれない、そして、トラックがより低いレベルを上回るスピードを保ち続ける限り、速度トリガは何も起こらないかもしれない。より低いレベルは、96km/h(60mph)であってもよく、96km/h(60mph)は、104km/h(65mph)のスピード制限マイナス8km/h(5mph)のマージンに基づいて、規定されているかもしれない。トラックが、96km/h(60mph)のより低いレベルを下回って減速し、その後、112km/h(70mph)の予め規定された速度を満たすかまたは超えた場合に、別の速度トリガが起こるかもしれない。別の設計では、ターゲットSETの速度が、予め規定された速度を超えた場合に、速度トリガが起こるかもしれないが、速度トリガは、各予め規定された時間間隔において、多くて1つの速度トリガに制限されているかもしれない。上記の例に対しては、速度トリガは、トラックが予め規定された速度を満たすかまたは超えた、5分の予め規定された時間間隔ごとに起こるかもしれない。速度トリガはまた、他の方法で規定されていてもよい。
【0063】
図7は、SUPLメッセージを使用する、速度トリガサービスに対するメッセージフロー700の設計を示している。SUPLエージェント140は、ターゲットSET110の速度が、ターゲット速度に達したときにはいつでも、知ることを望んでいるかもしれず、H−SLP130に対してMLP TLRRメッセージを送ってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント識別子や、ターゲットSET識別子や、速度トリガサービスが要求されているという表示や、トリガパラメータ等を含んでいてもよい。トリガパラメータは、ターゲット速度や、開始時間や、停止時間等を含んでいてもよい。H−SLP130は、速度トリガサービスに対して、SUPLエージェント140を認証および認可してもよい。H−SLP130はまた、ターゲットSET110との通知および/または検証を実行してもよい。速度トリガサービスはまた、ターゲットSETユーザのプライバシー設定の修正を動的に考慮してもよい。
【0064】
H−SLP130は、SET110をルックアップし、SETに対するルーティング情報を取得してもよい(ステップB)。H−SLP130は、速度トリガサービスに対するSUPLセッションを開始するために、SET110に対してSUPL INITメッセージを送ってもよい(ステップC)。SET110は、SUPL INITメッセージを受信し、それ自体を接続するか、または、データ接続を確立してもよい(ステップD)。SET110は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET110は、H−SLP130との速度トリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい(ステップE)。H−SLP130は、SUPL TRIGGERED STARTメッセージを受信し、SET110に対して使用するためのポジショニング方法を選択し、セッションIDや、選択したポジショニング方法や、トリガパラメータ等を含んでいてもよいSUPL TRIGGERED RESPONSEメッセージを戻してもよい(ステップF)。H−SLP130は、速度トリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLP TLRAメッセージを送ってもよい(ステップG)。
【0065】
その後に、H−SLP130とターゲットSET110が協調して、トリガイベントの発生を検出してもよい。セッションの間に、SET110の速度を周期的に(例えば、X秒ごとに)決定してもよい。1つの設計では、SETは、その速度を自律的に測定し、決定してもよい。別の設計では、SETは、H−SLP130と対話して、その速度を決定してもよい。一般に、SET110の速度は、SET110のみにより、H−SLP130からの支援とともにSET110により、SET110からの支援とともにH−SLP130による等して、決定してもよい。ターゲットSET110は、H−SLP130から支援データを取得するために、または、SET支援モードに対してその速度を決定するために、必要に応じて、ステップH、ステップI、および、ステップJを実行してもよい。
【0066】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。SET110は、その速度を決定してもよい(ステップK)。SET110は、ターゲット速度に対して、その現在の速度を比較してもよく、現在の速度がターゲット速度を超えているか否かを決定してもよい(ステップL)。トリガイベントが起こった場合に、ターゲットSET110は、トリガイベントの表示と、場合によっては、その速度とを持つSUPL REPORTメッセージを、H−SLP130に対して送ってもよい(ステップM)。その後、H−SLP130は、要求IDや、トリガイベント表示や、SET110の速度や、SET110のロケーション等を含んでいてもよいMLP TLREPメッセージを、SUPLエージェント140に対して送ってもよい(ステップN)。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。一般に、チェックを実行して、報告を開始するために、何らかのエンティティが指定されている。指定されたエンティティには、SET110の速度と、トリガパラメータとが提供される。
【0067】
ステップKないしステップNは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップO)。各処理サイクルは、SET110の速度を決定するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に、報告を開始してもよく、そうでなければ、スキップしてもよい。例えば、停止時間に達したとき等に、速度トリガセッションの終わりに達する。速度トリガセッションの終わりに達したときに、H−SLP130とSET110は、セッションを終了してもよい。H−SLP130が、SET110に対してSUPL ENDメッセージを送ってもよい(ステップP)。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。
【0068】
速度トリガサービスを使用して、ターゲット端末を周期的に監視し、ターゲット端末の速度が予め規定されたレベルに達したときにはいつでも、第三者(例えば、SUPLエージェント140)に通知を送ってもよい。第三者は、ロケーションサーバ(例えば、H−SLP130)に対してロケーション要求を送ってもよい。ターゲット端末と協調しているロケーションサーバは、ポジションおよび速度の決定手順を開始してもよい。手順により、予め規定されたレベルを超えている端末速度の検出が可能になるかもしれない。このトリガイベントを検出したときにはいつでも、ロケーションサーバが、ロケーションクライアントに通知してもよい。例えば、それらのトラックが112km/h(70mph)を超えたときにはいつでも、知りたいと思っているかもしれない運送会社のオペレーションセンターにより、このサービスを使用してもよい。その保険契約者が一般的にローカルのスピード制限を遵守していることを検証するために、保険会社によっても、このサービスを使用してもよく、例えば、ローカルのスピード制限を遵守していることにより、その後、保険契約者には、より低い保険料という資格が与えられるかもしれない。
【0069】
T−D−Vの組み合わせのトリガサービスは、最後の報告以降に経過した時間と、最後の報告以降に進行した距離と、最後の報告以降に達した最高速度とに基づいて規定されているトリガイベントをサポートすることができる。T−D−Vの組み合わせのトリガサービスは、経過した時間や、進行した距離や、最高速度、および/または、他のパラメータの他の組み合わせもサポートすることができる。例えば、時間、距離、および、速度の以下の関数のうちの1つに基づいて、T−D−Vの組み合わせのトリガ(または、トリガ条件)を規定してもよい:
【数1】
【0070】
または、
【数2】
【0071】
ここで、T、D、および、Vは、それぞれ、最後の報告以降に経過した時間と、最後の報告以降に進行した距離と、最後の報告以降の最高速度とに対する現在の値である。
f(T)は、時間トリガに対する式(例えば、ブール式)であり、
g(D)は、距離トリガに対する式(例えば、ブール式)であり、
h(V)は、速度トリガに対する式(例えば、ブール式)であり、
“AND”は、論理AND演算を示しており、
“OR”は、論理OR演算を示している。
【0072】
ブール式は、その入力パラメータの関数に基づいて、真または偽の出力を返す。例として、進行した距離に対するブール式は、g(D)=(D≧D1)として規定してもよく、ここで、D1は、予め規定された距離である。進行した距離Dが、予め規定された距離D1に等しい、または、予め規定された距離D1より大きい場合に、式は真であり、そうでなければ、偽であるだろう。f1(T)とf2(T)は、i=1または2に対する、fi(T)=(T≧Ti)により与えられる、時間トリガに対する2つのブール式であり、ここで、T1とT2は、経過した時間に対する2つの予め規定された値である。同様の方法で、速度トリガに対する式を規定してもよい。いったん、何らかのトリガ条件が起こると、次の報告まで、そのトリガ条件は有効なままであるかもしれない。このことは、新しい報告が送られた後まで、トリガが起こり、そして、後に消失するのを防ぐだろう。
【0073】
例えば、車隊管理センターは、最後の報告以降にトラックが16キロメートル(10マイル)(D1=16キロメートル(10マイル))移動したときにはいつでも、対象としているそのトラックの移動に関する更新を報告で欲しいと思っているかもしれないが、報告は、せいぜい、1時間ごとに(T1=60分)トラック当たり1つである。センターはまた、トラックが120km/h(75mph)(V1=120km/h(75mph))に達した場合には、即座に知らせてほしいと思っているかもしれない。コンボトリガ関数は、次のように規定してもよい:
【数3】
【0074】
ここで、Tは、最後の報告が送られた以降に経過した時間であり、
Dは、最後の報告以降に進行した距離であり、
Vは、最後の報告以降の最高スピードである。
【0075】
進行した距離Dは、(i)ロケーション測定値間の増分距離の合計として計算してもよく、または、(ii)最後の報告中のロケーションまでの距離として計算してもよい。例えば、ケース(i)に対する変数T、Dと、Vとは、すべて、時間の増加する関数とすることができる。
【0076】
スピードを出しているドライバーに対する過剰な報告の発生を避けるために、センターは、10分(T2=10分)ごとにせいぜい1つのスピード報告を望むかもしれない。そこで、コンボトリガ関数は、次のように規定してもよい:
【数4】
【0077】
上記の方程式により示されているように、DおよびVに対する異なる予め規定された値とともに、異なる予め規定された時間値を使用してもよい。
【0078】
1つの設計では、T−D−Vの組み合わせのトリガサービスに対してより高い柔軟性を可能にするために、上記のブール式(例えば、f(T)、g(D)、および、h(V))は、SETの現在のロケーションや、最後の報告以降のSETロケーションの組や、現在の時間や、または、最後の報告以降の時間期間等を含んでいてもよく、あるいは、これらに依存してもよい。このことを使用して、進行した距離と、最高速度と、次の報告までの時間とに対して異なる予め規定された値を設定してもよい。例えば、運送会社は、最後の報告以降に進行したロケーションに対する普通の(例えば、最高)スピード制限にしたがって、予め規定された最高速度を調整してもよい。この会社はまた、ルートのタイプにしたがって、予め規定された進行距離を調整してもよい、例えば、主要な高速道路に沿って進行しているトラックに対しては、より大きい予め規定された距離を使用して、予め規定された進行距離を調整してもよい。この会社はまた、時刻にしたがって、例えば、日中の忙しく移動する期間に対しては、より短い間隔を使用して、および、夕方または夜のような余り忙しくない期間に対しては、より長い間隔を使用して、予め規定された時間間隔を調整してもよい。
【0079】
図8は、SUPLメッセージを使用する、T−D−Vの組み合わせのトリガサービスに対するメッセージフロー800の設計を示している。SUPLエージェント140は、ターゲットSET110に対するロケーション情報および/または速度情報を知ることを望んでいるかもしれず、H−SLP130に対してMLP TLRRメッセージを送ってもよい(ステップA)。MLP TLRRメッセージは、SUPLエージェント識別子や、ターゲットSET識別子や、T−D−Vの組み合わせのトリガサービスが要求されているという表示や、トリガパラメータ等を含んでいてもよい。トリガパラメータは、Tのパラメータ、Dのパラメータ、および/または、Vのパラメータや、例えば、[(T≧T1)AND(D≧D1)OR(V≧V1)]のような、所望のコンボトリガ関数や、開始時間や、停止時間等を含んでいてもよい。H−SLP130は、T−D−Vの組み合わせのトリガサービスに対して、SUPLエージェント140を認証および認可してもよい。H−SLP130はまた、ターゲットSET110との通知および/または検証を実行してもよい。T−D−Vの組み合わせのトリガサービスはまた、ターゲットSETユーザのプライバシー設定の修正を動的に考慮にしてもよい。
【0080】
H−SLP130は、SET110をルックアップし、SETに対するルーティング情報を取得してもよい(ステップB)。H−SLP130は、T−D−Vの組み合わせのトリガサービスに対するSUPLセッションを開始するために、SET110に対してSUPL INITメッセージを送ってもよい(ステップC)。SET110は、SUPL INITメッセージを受信し、それ自体を接続するか、または、データ接続を確立してもよい(ステップD)。SET110は、通知ルールを評価し、適切なアクションにしたがってもよい。その後、SET110は、H−SLP130とのT−D−Vの組み合わせのトリガセッションを開始するために、SUPL TRIGGERED STARTメッセージを送ってもよい(ステップE)。H−SLP130は、SUPL TRIGGERED STARTメッセージを受信し、SET110に対して使用するためのポジショニング方法を選択し、セッションIDや、選択したポジショニング方法や、トリガパラメータ等を含んでいてもよいSUPL TRIGGERED RESPONSEメッセージを戻してもよい(ステップF)。H−SLP130は、T−D−Vの組み合わせのトリガサービスが受諾されたことをSUPLエージェント140に知らせるために、MLP TLRAメッセージを送ってもよい(ステップG)。
【0081】
ターゲットSET110は、H−SLP130からの支援データを取得するために、あるいは、SET支援モードに対してそのロケーションおよび/または速度を決定するために、必要に応じて、ステップH、ステップI、および、ステップJを実行してもよい。H−SLP130とターゲットSET110が協調して、トリガイベントの発生を検出してもよい。セッションの間に、SET110のロケーションおよび/または速度を周期的に(例えば、X秒ごとに)決定してもよい。1つの設計では、SET110は、そのロケーションおよび/または速度を自律的に測定し、決定してもよい(ステップK)。別の設計では、SET110は、(例えば、図8中のステップH、ステップI、およびステップJを使用して、)H−SLP130と対話して、そのロケーションおよび/または速度を決定してもよい。一般に、SET110のロケーションおよび/または速度は、SET110のみにより、H−SLP130からの支援とともにSET110により、SET110からの支援とともにH−SLP130による等して、決定してもよい。
【0082】
1つの設計では、ターゲットSET110が、トリガイベントをチェックして、報告を開始してもよい。SET110は、トリガイベントが起こったか否かを決定するために、現在のTの値、Dの値、および、Vの値を決定してもよく、コンボトリガ関数にしたがって、これらの値を論理的に組み合わせてもよい(ステップL)。トリガイベントが起こった場合に、ターゲットSET110は、トリガイベントの表示と、場合によっては、そのロケーションおよび/または速度とを持つSUPL REPORTメッセージを、H−SLP130に対して送ってもよい(ステップM)。別の設計では、H−SLP130が、トリガイベントをチェックして、報告を開始してもよい。いずれのケースでも、トリガイベントに応答して、H−SLP130は、要求IDや、トリガイベント表示や、SET110のロケーションおよび/または速度や、起こったトリガに対する条件や、ならびに/あるいは、他の情報を含んでいてもよいMLP TLREPメッセージを、SUPLエージェント140に対して送ってもよい(ステップN)。
【0083】
ステップKないしステップNは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップO)。各処理サイクルは、SET110のロケーションおよび/または速度を決定するためのステップと、SET110が進行した距離を更新するためのステップと、トリガイベントが起こったか否かを決定するためのステップとを含んでいてもよい。トリガイベントが起こった場合に報告を開始してもよく、そうでなければ、スキップしてもよい。T−D−Vの組み合わせのトリガセッションの終わりに達したときに(例えば、停止時間に達したときに)、H−SLP130とSET110は、セッションを終了してもよい。H−SLP130が、SET110に対してSUPL ENDメッセージを送ってもよい(ステップP)。H−SLP130はまた、セッションの終わりをSUPLエージェント140に通知してもよい。
【0084】
T−D−Vの組み合わせのトリガサービスを使用して、移動体端末を周期的に監視し、時間T、距離D、および/または、速度Vに基づいて、トリガイベントが起こったときにはいつでも、第三者(例えば、SUPLエージェント140)に通知を送ってもよい。第三者は、ロケーションサーバ(例えば、H−SLP130)にロケーション要求を送ってもよい。ロケーションサーバとターゲット端末が協調して、端末のロケーションおよび/または速度に基づいて、トリガイベントの発生を検出してもよい。トリガイベントを検出したときにはいつでも、ロケーションサーバは、ロケーションクライアントに通知してもよい。
【0085】
別の態様では、SET対SET速度サービスは、要求SETが、SET対SET速度セッションの間に、1つ以上のターゲットSETの絶対的な速度または相対的な速度を、進行中のベースで(例えば、周期的に、1回、等)取得することを可能にする。SUPLエージェントは、要求SET中に存在していてもよく、ターゲットSETの速度を要求してもよい。各SETは、H−SLPとのポジショニング手順を実行することが可能であってもよく、および/または、それ自体で、ポジショニング手順を実行することが可能であってもよい。ポジショニング手順は、SETのロケーションおよび/または速度を含んでいてもよいロケーション情報を提供することができる。
【0086】
図9は、SUPLメッセージを使用する、SET対SET速度サービスに対するメッセージフロー900の設計を示している。要求SET114中のSUPLエージェント144は、ターゲットSET110の速度を知ることを望んでいるかもしれない。SUPLエージェント144はSET114中に存在しているので、SET開始のサービスを使用することができ、SUPLエージェント144は、SET対SET速度サービスを開始することをSET114に内部的に要求してもよい(ステップA)。その後、要求SET114は、H−SLP130と通信して、SET開始トリガセッションを確立してもよい(ステップB)。ステップBにおけるセッション確立は、(i)SET114が、H−SLP130に対してSUPL TRIGGERED STARTメッセージを送ることと、(ii)H−SLP130が、SET114に対してSUPL TRIGGERED RESPONSEメッセージを戻すこととを含んでいてもよい。SUPL TRIGGERED STARTメッセージは、SET対SET速度サービスが要求されていることを示していてもよく、SUPL TRIGGERED STARTメッセージはまた、要求SET識別子や、ターゲットSET識別子や、相対的なまたは絶対的な速度が要求されているか否かという表示や、セッションの開始時間および停止時間や、確定の数や、確定間の間隔等のような情報を含んでいてもよい。H−SLP130は、SET対SET速度サービスに対して、SET114を認証および認可してもよい。ステップBにおけるセッション確立に続いて、SET114は、SUPLエージェント144に対して、要求を内部的に肯定応答してもよく、要求されたサービスを実行するだろうことを確認通知してもよい(ステップC)。H−SLP130は、ターゲットSET110とのロケーションセッションを確立してもよい(ステップD〜ステップH)。これは、SET110との通知および/または検証を含んでいてもよい。
【0087】
H−SLP130は、セッションの間に、要求SET114および/またはターゲットSET110と協調して、ターゲットSET110の速度を決定し、基準SET114の速度を決定し、ターゲットSET110に支援を提供し、および/または、基準SET114に支援を提供してもよい。H−SLP130はまた、セッションの間に、ターゲットSET110の速度を要求SET114と共有すること、および/または、要求SET114の速度をターゲットSET110と共有することを伴ってもよい。
【0088】
ターゲットSET110は、H−SLP130から支援データを取得するために、または、SET支援モードに対してその速度を決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。同様に、基準SET114は、H−SLP130から支援データを取得するために、または、その速度を決定するために、必要に応じて、ステップI、ステップJ、および、ステップKを実行してもよい。ターゲットSET110が、その速度を決定してもよく(ステップL)、その速度を持つSUPL REPORTメッセージをH−SLP130に対して送ってもよい(ステップM)。要求SET114は、ターゲットSET110の速度を要求するために、H−SLP130にSUPL POSITION REQUESTメッセージを送ってもよい(ステップN)。応答して、H−SLP130が、SUPL REPORTメッセージ中で、ターゲットSET110の現在の速度を、要求SET114に転送してもよい(ステップO)。SET110からターゲットSET110の速度を受信したときにはいつでも、H−SLP130はまた、ターゲットSET110の速度を転送してもよい。ターゲットSET110はまた、(例えば、図9中の破線により示されているように、)H−SLP130と対話することなく、その速度を直接、要求SET114に送ってもよい。いずれのケースでも、要求SET114は、ターゲットSET110の速度をSUPLエージェント144に対して提供することができる(ステップP)。
【0089】
ステップLないしステップPは、1つの処理サイクルに対するものである。同様の方法で、付加的な処理サイクルを実行してもよい(ステップQ)。各処理サイクルは、ターゲットSET110の速度を決定するためのステップと、速度を要求SET114に提供するためのステップとを含んでいてもよい。例えば、停止時間に達したとき等に、SET対SET速度セッションの終わりに達する。セッションの終わりに達したときに、H−SLP130と、要求SET114と、ターゲットSET110とが、セッションを終了してもよい。H−SLP130が、ターゲットSET110に対してSUPL ENDメッセージを送ってもよい(ステップR)。H−SLP130はまた、セッションの終わりを要求SET114に通知してもよく、その後、SET114が、SUPLエージェント144に通知してもよい。
【0090】
簡潔さのために、図9は、要求SET114が、1つのターゲットSET110の速度を要求するケースを示している。要求SET114はまた、複数のターゲットSET110の速度を要求してもよい。各ターゲットSETは、ターゲットSET110に対して、図9において示されているような処理を実行してもよい。
【0091】
図9に基づいている別の設計では、要求SET114は、ターゲットSET110と直接、信号(例えば、無線信号または赤外線信号)を交換することにより、ターゲットSET110に関する要求SET114の速度を決定してもよい。いずれかのSETが、往復信号伝播遅延を測定してもよく、信号測定値に基づいて、SET間の直線距離を取得してもよい。信号測定値と距離算出とを短い間隔で繰り返すことにより、いずれかのSETが、もう一方のSETに関する一方のSETの相対的な速度を取得することができる。代替的に、SET間で交換された信号が、固定かつ既知の周波数成分を、あるいは、固定された既知の間隔で繰り返されている、信号内の何らかのマーカーを含んでいる場合に、周波数成分の周波数における変化をまたは周期的なマーカーの変化を測定することにより、いずれかのSETが、もう一方のSETに関するその相対的な速度を取得することができる。双方のSETに対して、図9中のステップI〜ステップLを、この信号交換および測定の手順に置換してもよい。
【0092】
図3および図6〜図9は、SUPLメッセージを使用する、異なるロケーションサービスに対する例示的なメッセージフローを示している。メッセージフローを変更してもよい。例えば、SUPLエージェント140は、進行中のセッションを終了するようにH−SLP130に要求してもよい。H−SLP130、SET110、および/または、SET112もまた、進行中のセッションを終了することを決めてもよい。これらのケースでは、H−SLP130、SET110、および、(存在する場合には)SET112が、セッションを終了させるためのアクションを取ってもよい。SUPLエージェント140、H−SLP130、SET110、または、(存在する場合には)SET112は、サービスを中断することを要求してもよい。このケースでは、中断を要求しているエンティティにより、サービスの再開に対する要求が行われるまで、ポジション決定とトリガイベント検出とは中断される(すなわち、実行されない)。
【0093】
ここで説明したロケーションサービスにより、SUPLエージェントが、複数の要求を行って、結果を評価する代わりに、H−SLPに対する単一のロケーション要求によって、ターゲットSETに対するロケーション情報を取得することが可能になる。トリガロケーションサービスは、ロケーション要求の数を減少させることができ、SUPLエージェント、H−SLP、および、ターゲットSETのような、すべての影響を受けるエンティティに対するシグナリングならびに処理の量を大幅に減少させることができる。
【0094】
図10は、トリガロケーションサービスをサポートするためのプロセス1000の設計を示している。端末/SET、H−SLP、または、他の何らかのエンティティにより、プロセス1000を実行してもよい。端末に対する少なくとも1つのロケーション関連測定値を取得してもよい(ブロック1012)。各ロケーション関連測定値は、端末が進行した距離に対するもの、または、端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定してもよい(ブロック1014)。トリガイベントが起こっていた場合に、報告を送ってもよい(ブロック1016)。
【0095】
1つの設計では、等距離トリガサービスに対しては、少なくとも1つのロケーション関連値は、端末が進行した距離に対するものであってもよい。端末が進行した距離は、さまざまな方法で決定することができる。1つの設計では、(i)端末のロケーションを周期的に決定することにより、および、(ii)最後のトリガイベント以降の(またはトリガされたセッションの開始以降の)端末の連続するロケーション間の増分距離を累積することにより、進行した距離を決定してもよい。別の設計では、端末の現在のロケーションと、開始のロケーションとの間の距離に基づいて、進行した距離を決定してもよく、開始のロケーションは、最後のトリガイベントにおける端末のロケーションであってもよい。さらに別の設計では、端末の現在のロケーションと開始のロケーションとの間の特定のルートに沿った距離に基づいて、進行した距離を決定してもよい。この特定のルートは、直線の通った道筋に沿っていてもよく、または、さらに複雑なルートに沿っていてもよい。端末が進行した距離はまた、他の方法で決定してもよい。いずれのケースでも、端末が進行した距離に基づいて、トリガイベントが起こったか否かを決定することができる。例えば、端末が進行した距離が、予め規定された距離を超えている場合に、トリガイベントを宣言してもよい。
【0096】
別の設計では、相対的なSET対SETトリガサービスに対しては、少なくとも1つのロケーション関連測定値は、移動する地理的なターゲットエリアに関する端末のロケーションに対するものであってもよい。基準端末のロケーションに基づいて、移動する地理的なターゲットエリアを決定してもよい。例えば、移動する地理的なターゲットエリアは、基準端末のロケーションを中心とした、予め規定された半径を有する円形のエリアであってもよい。移動する地理的なターゲットエリアに関する端末のロケーションに基づいて、トリガイベントが起こったか否かを決定してもよい。例えば、端末のロケーションが、移動する地理的なターゲットエリアに関する基準に一致する場合に、トリガイベントを宣言してもよい。基準は、移動する地理的なターゲットエリアの内にあるか、外にあるか、移動する地理的なターゲットエリアに入るか、あるいは、移動する地理的なターゲットエリアを離れるかであってもよい。
【0097】
さらに別の設計では、速度トリガサービスに対しては、端末に対する少なくとも1つのロケーション関連測定値は、端末の速度に対するものであってもよい。速度は、スピードのみを、または、方位のみを、または、スピードと方位の双方を含んでいてもよい。端末の速度に基づいて、トリガイベントが起こったか否かを決定してもよい。例えば、周期的に、端末の速度を決定してもよい。最後のトリガイベント以降の何らかの時間における端末の速度が、予め規定された速度を満たすか、または、超えた場合に、トリガイベントを宣言してもよい。
【0098】
さらに別の設計では、T−D−Vの組み合わせのトリガサービスに対しては、少なくとも1つのロケーション関連測定値は、端末が進行した距離に対するもの、および、端末の速度に対するものであってもよい。端末が進行した距離に基づいて、端末の速度に基づいて、および/または、最後のトリガイベント以降に経過した時間に基づいて、トリガイベントが起こったか否かを決定してもよい。例えば、複数の式を決定してもよい。各式は、予め規定された距離に関する、端末が進行した距離に対するものであってもよく、または、予め規定された速度に関する、端末の最高速度に対するものであってもよく、または、予め規定された時間に関する、経過した時間に対するものであってもよい。複数の式の関数に基づいて、トリガイベントが起こったか否かを決定してもよい。
【0099】
図11は、SET対SET速度サービスをサポートするプロセス1100の設計を示している。第1の端末/SETにより、プロセス1100を実行してもよい。第1の端末は、第2の端末の速度に対する要求を、例えば、H−SLPのようなロケーションセンターに送ってもよい(ブロック1112)。第1の端末は、その後に、例えば、ロケーションセンターから、または、ロケーションセンターを通すことなく第2の端末から直接、第2の端末の速度を受信してもよい(ブロック1114)。第1の端末は、1回または複数回のいずれかで(例えば、周期的に)、要求に応答した第2の端末の速度を受信してもよい。
【0100】
図12は、図1中の、端末/SET110と、ワイヤレスネットワーク120と、ロケーションサーバ/H−SLP130との設計のブロックダイヤグラムを示している。簡潔さのために、図12は、端末110に対して、1つ以上の制御装置/プロセッサ1210と、1つのメモリ1212と、1つの送信機/受信機(TMTR/RCVR)1214とを示し、ワイヤレスネットワーク120に対して、1つ以上の制御装置/プロセッサ1220と、1つのメモリ1222と、1つの送信機/受信機1224と、1つの通信(Comm)ユニット1226とを示し、H−SLP130に対して、1つ以上の制御装置/プロセッサ1230と、1つのメモリ1232と、1つの通信ユニット1234とを示している。一般に、各エンティティは、任意の数のプロセッサ、制御装置、メモリ、送信機/受信機、通信ユニット等を備えていてもよい。端末110は、1つ以上のワイヤレスネットワークおよび/またはワイヤラインネットワークとの通信をサポートしてもよい。端末110はまた、例えば、GPS、Galileo等のような、1つ以上の衛星ポジショニングシステムから、信号を受信して処理してもよい。
【0101】
ダウンリンク上で、ワイヤレスネットワーク120は、そのカバレッジエリア内の端末に対して、トラフィックデータと、シグナリングと、パイロットとを送信してもよい。これらのさまざまなタイプの情報は、プロセッサ1220により処理され、送信機1224により調整され、ダウンリンク上で送信されてもよい。端末110において、ワイヤレスネットワーク120からのダウンリンク信号は、さまざまなタイプの情報を取得するために、受信機1214により受信および調整され、プロセッサ1210によりさらに処理されてもよい。プロセッサ1210は、図10中のプロセス1000を、図11中のプロセス1100を、および/または、ここで説明する技術に対する他のプロセスを、実行してもよい。プロセッサ1210はまた、図2、図3、および、図5〜図9中の何らかのSETに対する処理を実行してもよい。メモリ1212とメモリ1222は、端末110に対するプログラムコードおよびデータと、ワイヤレスネットワーク120に対するプログラムコードおよびデータとをそれぞれ記憶していてもよい。アップリンク上で、端末110は、ワイヤレスネットワーク120に対して、トラフィックデータと、シグナリングと、パイロットとを送信してもよい。これらのさまざまなタイプの情報は、プロセッサ1210により処理され、送信機1214により調整され、アップリンク上で送信されてもよい。ワイヤレスネットワーク120において、端末110および他の端末からのアップリンク信号は、端末からのさまざまなタイプの情報を取得するために、受信機1224により受信および調整され、プロセッサ1220によりさらに処理されてもよい。ワイヤレスネットワーク120は、通信ユニット1226を通して、H−SLP130と直接的にまたは間接的に通信してもよい。
【0102】
H−SLP130内では、プロセッサ1230は、端末に対するロケーションサービスをサポートするための処理を実行してもよい。例えば、プロセッサ1230は、図10中のプロセス1000を、および/または、ここで説明する技術に対する他のプロセスを、実行してもよい。プロセッサ1230はまた、図2、図3、および、図5〜図9中のH−SLP130に対する処理を実行してもよい。プロセッサ1230はまた、端末110に対するロケーション推定を計算し、SUPLエージェント140に対してロケーション情報を提供する等してもよい。メモリ1232は、H−SLP130に対するプログラムコードおよびデータを記憶していてもよい。通信ユニット1234により、H−SLP130が、ワイヤレスネットワーク120、端末110、および/または、他のネットワークエンティティと通信することが可能になるかもしれない。H−SLP130と端末110は、ユーザプレーン(例えば、SUPL)を通してメッセージを交換してもよく、これらのメッセージは、ワイヤレスネットワーク120によりトランスポートされてもよい。
【0103】
当業者は、さまざまな異なる技術および技法のうちの何らかのものを使用して、情報および信号を表してもよいことを理解するだろう。例えば、上記の説明全体を通して参照された、データ、命令、コマンド、情報、信号、ビット、シンボルおよびチップは、電圧、電流、電磁波、磁界または磁気の粒子、光学界または光の粒子、あるいはこれらの何らかの組み合わせにより、表してもよい。
【0104】
ここでの開示に関連して説明した、さまざまな例示的な論理ブロック、モジュール、回路およびアルゴリズムステップが、電子ハードウェア、コンピュータソフトウェア、あるいは双方の組み合わせたものとして実現されてもよいことを当業者はさらに正しく認識するであろう。ハードウェアおよびソフトウェアのこの交換可能性を明確に示すために、さまざまな例示的なコンポーネント、ブロック、モジュール、回路およびステップを一般的にこれらの機能性に関して上記で説明した。このような機能性がハードウェアあるいはソフトウェアとして実現されるか否かは、特定の応用および全体的なシステムに課せられた設計の制約に依存する。当業者は、それぞれの特定の応用に対して方法を変化させて、説明した機能性を実現してもよいが、このようなインプリメンテーション決定は、本開示の範囲からの逸脱を生じさせるものとして解釈すべきではない。
【0105】
ここで説明したポジション決定技法は、ワイヤレスワイドエリアネットワーク(WWAN)や、ワイヤレスローカルエリアネットワーク(WLAN)や、ワイヤレスパーソナルエリアネットワーク(WPAN)等のような、さまざまなワイヤレス通信ネットワークに関連して実現してもよい。用語“ネットワーク”および“システム”は、区別なく使用することが多い。WWANは、コード分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一搬送波周波数分割多元接続(SC−FDMA)ネットワーク、ロングタームエボリューション(LTE)ネットワーク、WiMAX(IEEE802.16)ネットワーク等であってもよい。CDMAネットワークは、cdma2000、ワイドバンドCDMA(W−CDMA)等のような、1つ以上の無線接続技術(RAT)を実現してもよい。cdma2000は、IS−95、IS−2000、および、IS−856標準規格を含んでいる。TDMAネットワークは、グローバルシステムフォーモバイルコミュニケーション(GSM(登録商標))、デジタル高度移動体電話機システム(D−AMPS)、または、他の何らかのRATを実現してもよい。GSMとW−CDMAとは、“第3世代パートナーシッププロジェクト”(3GPP)という名のコンソーシアムからの文書中に記述されている。cdma2000は、“第3世代パートナーシッププロジェクト2”(3GPP2)という名のコンソーシアムからの文書中に記述されている。3GPPおよび3GPP2の文書は、公然と利用可能である。WLANは、IEEE802.11xネットワークであってもよく、WPANは、ブルートゥース(登録商標)ネットワークや、IEEE802.15xや、または、他の何らかのタイプのネットワークであってもよい。技法はまた、WWAN、WLAN、および/またはWPANの任意の組み合わせに関連して実現してもよい。
【0106】
衛星ポジショニングシステム(SPS)は、典型的に、送信機から受信した信号に少なくとも部分的に基づいて、エンティティが自己のロケーションを、地球上で、または、地球より上で、決定することが可能であるように配置されている送信機のシステムを具備している。このような送信機は、典型的に、1組のチップ数の反復擬似ランダムノイズ(PN)コードでマークされている信号を送信し、地上ベースの制御局、ユーザ機器、および/または、宇宙ビークル上に位置付けられていてもよい。特定の例では、このような送信機は、地球軌道衛星ビークル(SV)上に位置付けられていてもよい。例えば、グローバルポジショニングシステム(GPS)、Galileo、Glonass、または、Compassのような、グローバルナビゲーション衛星システム(GNSS)配列中のSVは、配列中の他のSVにより送信されるPNコードと区別できるPNコードで(例えば、GPS中にあるような、各衛星に対して異なるPNコードを使用して、または、Glonass中にあるような、異なる周波数上で同じコードを使用して、)マークされている信号を送信してもよい。ある態様にしたがうと、ここで提示されている技法は、SPSに対するグローバルシステム(例えば、GNSS)に制限されるものではない。例えば、日本上の準天頂衛星システム(QZSS)や、インド上のインド地域航法衛星システム(IRNSS)や、中国上の北斗等のような、さまざまな領域システム中での使用に対して、ここで提供されている技法を適用してもよく、または、そうでなければ、イネーブルしてもよく、ならびに/あるいは、1つ以上のグローバルナビゲーション衛星システムおよび/または領域ナビゲーション衛星システムとともに使用するために関係付けられていてもよい、あるいは、そうでなければ、イネーブルされていてもよい、さまざまな補強システム(例えば、衛星ベースの補強システム(SBAS))中での使用に対して、ここで提供されている技法を適用してもよく、または、そうでなければ、イネーブルしてもよい。これらに限定されないが、例として、SBASは、例えば、ワイドエリア補強システム(WAAS)や、欧州静止衛星ナビゲーションオーバーレイサービス(EGNOS)や、多機能衛星補強システム(MSAS)や、GPS支援地球補強ナビゲーションまたは地球補強ナビゲーションシステム(GAGAN)や、および/または、これらに類するもののような、完全性情報や、微分補正等を提供する補強システムを含んでいてもよい。したがって、ここで使用するように、SPSは、1つ以上の、グローバルのならびに/あるいは領域的な、ナビゲーション衛星システムおよび/または補強システムの何らかの組み合わせを含んでいてもよく、SPS信号は、SPS信号、SPSのような信号、および/または、このような1つ以上のSPSに関係付けられている他の信号を含んでいてもよい。
【0107】
ここで使用するように、端末は、セルラ通信デバイスまたは他のワイヤレス通信デバイスや、パーソナル通信システム(PCS)デバイスや、パーソナルナビゲーションデバイス(PND)や、パーソナル情報マネージャ(PIM)や、パーソナルデジタルアシスタント(PDA)や、ラップトップや、または、ワイヤレス通信および/またはナビゲーション信号を受信することが可能である他の適切な移動体デバイスのような、デバイスのことを指す。用語“端末”はまた、衛星信号受信、支援データ受信、および/または、ポジション関連の処理が、デバイスにおいて起こるか、あるいは、PNDにおいて起こるか否かに関わらず−短距離ワイヤレス接続により、赤外線接続により、ワイヤライン接続により、または、他の接続による等して、パーソナルナビゲーションデバイス(PND)と通信するデバイスを含むように意図されている。また、“端末”は、インターネット、WiFi(登録商標)、フェムトセル、または、他のネットワークを通す等して、サーバと通信することが可能である、ならびに、衛星信号受信、支援データ受信、および/または、ポジション関連の処理が、デバイスにおいて起こるか、サーバにおいて起こるか、または、ネットワークに関係付けられている別のデバイスにおいて起こるか否かに関わらず、サーバと通信することが可能である、ワイヤレス通信デバイス、コンピュータ、ラップトップ等を含むすべてのデバイスを含むように意図されている。上記の何らかの動作可能な組み合わせもまた、“端末”であると考えられる。
【0108】
ここで説明した方法論/インプリメンテーションは、アプリケーションに依存して、さまざまな手段により実現することができる。例えば、これらは、ハードウェアで、ファームウェアで、ソフトウェアで、または、これらの何らかの組み合わせで実現してもよい。ハードウェアを伴うインプリメンテーションのために、プロセッサは、1つ以上の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、汎用プロセッサ、制御装置、マイクロ制御装置、マイクロプロセッサ、状態機械、電子デバイス、ここで説明した機能を実行するように設計された他の電子ユニット、あるいは、例えば、DSPコアを備えた1つ以上のマイクロプロセッサ、複数のマイクロプロセッサ、または、他の何らかの適切なコンフィギュレーションのような、これらの組み合わせで、実現してもよい。
【0109】
ファームウェアおよび/またはソフトウェアを伴うインプリメンテーションのために、ここで説明した機能を実行するモジュール(例えば、手順、関数等)により、方法論を実現してもよい。ここで説明した方法論を実現する際に、命令を明確に具現化する何らかの機械読取可能媒体を使用してもよい。例えば、ファームウェア/ソフトウェアコードは、メモリ中に記憶され、プロセッサ/コンピュータに機能を実行させるために、プロセッサ/コンピュータによって実行されてもよい。メモリは、プロセッサ内で、または、プロセッサの外部で、実現してもよい。ここで使用したような用語“メモリ”は、何らかのタイプのロングタームの、ショートタームの、揮発性の、不揮発性の、または、他のメモリのことを指し、何らかの特定のタイプのメモリまたは多数のメモリに、あるいは、メモリが記憶されている媒体のタイプに限定されない。
【0110】
ファームウェアおよび/またはソフトウェアで実現した場合に、機能は、1つ以上の命令またはコードとして、コンピュータ読取可能媒体上に記憶されてもよい。例は、データ構造によりエンコードされるコンピュータ読取可能媒体と、コンピュータプログラムによりエンコードされるコンピュータ読取可能媒体とを含む。コンピュータ読取可能媒体は、コンピュータプログラムプロダクトの形態を取ってもよい。コンピュータ読取可能媒体は、物理コンピュータ記憶媒体を含む。記憶媒体は、コンピュータによりアクセスできる何らかの利用可能な媒体であってもよい。例として、これらに限定されないが、このようなコンピュータ読取可能媒体は、RAM、ROM、EEPROM、CD−ROMまたは他の光ディスク記憶装置、磁気ディスク記憶装置、半導体記憶装置、または、他の記憶デバイス、あるいは、コンピュータによりアクセスでき、命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用できる他の何らかの媒体を含むことができる;ここで使用したようなディスク(diskおよびdisc)は、コンパクトディスク(CD)、レーザディスク(登録商標)、光ディスク、デジタル多用途ディスク(DVD)、フロッピー(登録商標)ディスク、および、ブルーレイ(登録商標)ディスクを含み、ここで、一般的に、ディスク(disk)は、データを磁気的に再生する一方で、ディスク(disc)は、データをレーザによって光学的に再生する。上記のものを組み合わせたものもまた、コンピュータ読取可能媒体の範囲内に含められるべきである。
【0111】
コンピュータ読取可能媒体上の記憶装置に加えて、通信装置中に備える送信媒体上で、命令および/またはデータが、信号として提供されてもよい。例えば、通信装置は、命令およびデータを示す信号を有するトランシーバを備えていてもよい。命令およびデータは、1つ以上のプロセッサに、特許請求の範囲中に概説している機能を実現させるように構成されている。すなわち、通信装置は、開示した機能を実行するための情報を示す信号を持つ送信媒体を備えている。第1の時間では、通信装置中に備えられている送信媒体は、開示した機能を実行するための情報の第1の部分を含んでいてもよい一方で、第2の時間では、通信装置中に備えられている送信媒体は、開示した機能を実行するための情報の第2の部分を含んでいてもよい。
【0112】
ここでは、参照のために、および、あるセクションを位置付けるのを助けるために、見出しが含まれている。これらの見出しは、説明した概念の範囲をその下に限定するように意図されておらず、これらの概念は、本明細書全体を通して、他のセクションにおける適用可能性を有していてもよい。
【0113】
本開示の以前の説明は、当業者が、本開示を製作または使用できるように提供されている。本開示に対するさまざま改良は当業者に容易に明らかとなり、ここに定義された一般的な原理は、本開示の範囲から逸脱することなく、他のバリエーションに適用されてもよい。したがって、本開示は、ここで説明した例および設計に限定されることを意図しているものではなく、ここで開示した原理および新規の特徴と一致した最も広い範囲に一致させるべきである。
【特許請求の範囲】
【請求項1】
ロケーションサービスをサポートする方法において、
端末に対する少なくとも1つのロケーション関連測定値を取得することと、
前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定することとを含み、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものである方法。
【請求項2】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記端末が進行した距離に基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項3】
前記端末が進行した距離を決定することは、
前記端末のロケーションを周期的に決定することと、
最後のトリガイベント以降の前記端末の連続するロケーション間の距離を累積することにより、前記端末が進行した距離を決定することとを含む請求項2記載の方法。
【請求項4】
前記端末が進行した距離を決定することは、前記端末の現在のロケーションと、開始のロケーションとの間の距離に基づいて、前記端末が進行した距離を決定することを含む請求項2記載の方法。
【請求項5】
前記端末が進行した距離を決定することは、前記端末の現在のロケーションと、開始のロケーションとの間の、特定のルートに沿った距離に基づいて、前記端末が進行した距離を決定することを含む請求項2記載の方法。
【請求項6】
前記トリガイベントが起こっているか否かを決定することは、前記端末が進行した距離が、予め規定された距離を超えている場合に、前記トリガイベントが起こっていると決定することを含む請求項2記載の方法。
【請求項7】
前記少なくとも1つのロケーション関連測定値が、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項8】
前記移動する地理的なターゲットエリアに関する前記端末のロケーションを決定することは、
基準端末のロケーションを決定することと、
前記基準端末のロケーションに基づいて、前記移動する地理的なターゲットエリアを決定することとを含む請求項7記載の方法。
【請求項9】
前記移動する地理的なターゲットエリアは、前記基準端末のロケーションを中心とした、予め規定された半径を有する円形のエリアである請求項8記載の方法。
【請求項10】
前記トリガイベントが起こっているか否かを決定することは、前記端末のロケーションが、前記移動する地理的なターゲットエリアに関する基準に一致する場合に、前記トリガイベントが起こっていると決定することを含み、前記基準は、前記移動する地理的なターゲットエリアの内にあるか、前記移動する地理的なターゲットエリアの外にあるか、前記移動する地理的なターゲットエリアに入るか、または、前記移動する地理的なターゲットエリアを離れるかである請求項7記載の方法。
【請求項11】
前記少なくとも1つのロケーション関連測定値が、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項12】
前記トリガイベントが起こっているか否かを決定することは、最後のトリガイベント以降の何らかの時間における前記端末の速度が、予め規定された速度を満たしているか、または、予め規定された速度を超えている場合に、前記トリガイベントが起こっていると決定することを含む請求項11記載の方法。
【請求項13】
前記トリガイベントが起こっているか否かを決定することは、前記端末の速度が、第1のレベルを下回り、その後、第2のレベルを満たすか、または、第2のレベルを超えた場合に、前記トリガイベントが起こっていると決定することを含む請求項11記載の方法。
【請求項14】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するもの、および、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記端末が進行した距離と、前記端末の速度とに基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項15】
最後のトリガイベント以降に経過した時間にさらに基づいて、前記トリガイベントが起こっているか否かを決定する請求項14記載の方法。
【請求項16】
前記トリガイベントが起こっているか否かを決定することは、
複数の式を決定することと、
前記複数の式の関数に基づいて、前記トリガイベントが起こっているか否かを決定することとを含み、
各式は、予め規定された距離に関する前記端末が進行した距離に対するもの、または、予め規定された速度に関する前記端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものである請求項14記載の方法。
【請求項17】
前記トリガイベントが起こっていた場合に、報告を送ることをさらに含む請求項1記載の方法。
【請求項18】
前記端末と第2の端末との間で交換された少なくとも1つの信号に基づいて、前記端末に対する前記少なくとも1つのロケーション関連測定値を取得する請求項1記載の方法。
【請求項19】
前記少なくとも1つのロケーション関連測定値を取得するために、セキュアユーザプレーンロケーション(SUPL)メッセージを交換することをさらに含む請求項1記載の方法。
【請求項20】
ロケーションサービスをサポートする装置において、
端末に対する少なくとも1つのロケーション関連測定値を取得する手段と、
前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定する手段とを具備し、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものである装置。
【請求項21】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記端末が進行した距離に基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項22】
前記トリガイベントが起こっているか否かを決定する手段は、前記端末が進行した距離が、予め規定された距離を超えている場合に、前記トリガイベントが起こっていると決定する手段を備える請求項21記載の装置。
【請求項23】
前記少なくとも1つのロケーション関連測定値が、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項24】
基準端末のロケーションを決定する手段と、
前記基準端末のロケーションに基づいて、前記移動する地理的なターゲットエリアを決定する手段とをさらに具備する請求項23記載の装置。
【請求項25】
前記少なくとも1つのロケーション関連測定値が、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項26】
前記トリガイベントが起こっているか否かを決定する手段は、
最後のトリガイベント以降の前記端末の最高速度を決定する手段と、
前記最高速度が、予め規定された速度を超えている場合に、前記トリガイベントが起こっていると決定する手段を備える請求項25記載の装置。
【請求項27】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するもの、および、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記端末が進行した距離と前記端末の速度とに基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項28】
前記トリガイベントが起こっているか否かを決定する手段は、
複数の式を決定する手段と、
前記複数の式の関数に基づいて、前記トリガイベントが起こっているか否かを決定する手段とを備え、
各式は、予め規定された距離に関する前記端末が進行した距離に対するもの、または、予め規定された速度に関する前記端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものである請求項27記載の装置。
【請求項29】
ロケーションサービスをサポートする装置において、
端末に対する少なくとも1つのロケーション関連測定値を取得するようにと、
前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定するように構成されている少なくとも1つのプロセッサを具備し、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものである装置。
【請求項30】
前記少なくとも1つのプロセッサは、前記端末が進行した距離を決定するようにと、前記端末が進行した距離に基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項31】
前記少なくとも1つのプロセッサは、前記端末が進行した距離が、予め規定された距離を超えている場合に、前記トリガイベントが起こっていると決定するように構成されている請求項30記載の装置。
【請求項32】
前記少なくとも1つプロセッサは、前記移動する地理的なターゲットエリアに関する前記端末のロケーションを決定するようにと、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項33】
前記少なくとも1つのプロセッサは、基準端末のロケーションを決定するようにと、前記基準端末のロケーションに基づいて、前記移動する地理的なターゲットエリアを決定するように構成されている請求項32記載の装置。
【請求項34】
前記少なくとも1つのプロセッサは、前記端末の速度を決定するようにと、前記端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項35】
前記少なくとも1つのプロセッサは、最後のトリガイベント以降の前記端末の最高速度を決定するようにと、前記最高速度が、予め規定された速度を超えている場合に、前記トリガイベントが起こっていると決定するように構成されている請求項34記載の装置。
【請求項36】
前記少なくとも1つのプロセッサは、前記端末が進行した距離と前記端末の速度とを決定するようにと、前記端末が進行した距離と前記端末の速度とに基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項37】
前記少なくとも1つのプロセッサは、
複数の式を決定するようにと、
前記複数の式の関数に基づいて、前記トリガイベントが起こっているか否かを決定するように構成され、
各式は、予め規定された距離に関する前記端末が進行した距離に対するもの、または、予め規定された速度に関する前記端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものである請求項36記載の装置。
【請求項38】
コンピュータ読取可能媒体を具備するコンピュータプログラムプロダクトにおいて、
前記コンピュータ読取可能媒体は、
少なくとも1つのコンピュータに、端末に対する少なくとも1つのロケーション関連測定値を取得させるためのコードと、
前記少なくとも1つのコンピュータに、前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定させるためのコードとを含み、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものであるコンピュータプログラムプロダクト。
【請求項39】
ロケーションサービスをサポートする方法において、
第2の端末の速度に対する要求を第1の端末により送ることと、
前記第1の端末において、前記第2の端末の速度を受信することとを含む方法。
【請求項40】
前記要求を送ることは、ロケーションセンターに前記要求を送ることを含み、前記第2の端末の速度を受信することは、前記ロケーションセンターから前記第2の端末の速度を受信することを含む請求項39記載の方法。
【請求項41】
前記要求を送ることは、ロケーションセンターに前記要求を送ることを含み、前記第2の端末の速度を受信することは、前記ロケーションセンターを通すことなく、前記第2の端末から直接、前記第2の端末の速度を受信することを含む請求項39記載の方法。
【請求項42】
前記第2の端末の速度を受信することは、前記要求に基づいて、複数回、前記第2の端末の速度を受信することを含む請求項39記載の方法。
【請求項43】
前記第1の端末と前記第2の端末との間で交換された信号に対する測定値に基づいて、前記第2の端末の速度を決定する請求項39記載の方法。
【請求項44】
ロケーションサービスをサポートする装置において、
第2の端末の速度に対する要求を第1の端末により送る手段と、
前記第1の端末において、前記第2の端末の速度を受信する手段とを具備する装置。
【請求項45】
前記要求を送る手段は、ロケーションセンターに前記要求を送る手段を備え、前記第2の端末の速度を受信する手段は、前記ロケーションセンターから前記第2の端末の速度を受信する手段を備える請求項44記載の装置。
【請求項46】
前記第2の端末の速度を受信する手段は、前記要求に基づいて、複数回、前記第2の端末の速度を受信する手段を備える請求項44記載の装置。
【請求項47】
ロケーションサービスをサポートする装置において、
第2の端末の速度に対する要求を第1の端末により送るようにと、
前記第1の端末において、前記第2の端末の速度を受信するように構成されている少なくとも1つのプロセッサを具備する装置。
【請求項48】
前記少なくとも1つのプロセッサは、ロケーションセンターに前記要求を送るようにと、前記ロケーションセンターから前記第2の端末の速度を受信するようにさらに構成されている請求項47記載の装置。
【請求項49】
コンピュータ読取可能媒体を具備するコンピュータプログラムプロダクトにおいて、
前記コンピュータ読取可能媒体は、
少なくとも1つのコンピュータに、第2の端末の速度に対する要求を第1の端末により送らせるためのコードと、
前記少なくとも1つのコンピュータに、前記第1の端末において、前記第2の端末の速度を受信させるためのコードとを含むコンピュータプログラムプロダクト。
【請求項1】
ロケーションサービスをサポートする方法において、
端末に対する少なくとも1つのロケーション関連測定値を取得することと、
前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定することとを含み、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものである方法。
【請求項2】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記端末が進行した距離に基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項3】
前記端末が進行した距離を決定することは、
前記端末のロケーションを周期的に決定することと、
最後のトリガイベント以降の前記端末の連続するロケーション間の距離を累積することにより、前記端末が進行した距離を決定することとを含む請求項2記載の方法。
【請求項4】
前記端末が進行した距離を決定することは、前記端末の現在のロケーションと、開始のロケーションとの間の距離に基づいて、前記端末が進行した距離を決定することを含む請求項2記載の方法。
【請求項5】
前記端末が進行した距離を決定することは、前記端末の現在のロケーションと、開始のロケーションとの間の、特定のルートに沿った距離に基づいて、前記端末が進行した距離を決定することを含む請求項2記載の方法。
【請求項6】
前記トリガイベントが起こっているか否かを決定することは、前記端末が進行した距離が、予め規定された距離を超えている場合に、前記トリガイベントが起こっていると決定することを含む請求項2記載の方法。
【請求項7】
前記少なくとも1つのロケーション関連測定値が、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項8】
前記移動する地理的なターゲットエリアに関する前記端末のロケーションを決定することは、
基準端末のロケーションを決定することと、
前記基準端末のロケーションに基づいて、前記移動する地理的なターゲットエリアを決定することとを含む請求項7記載の方法。
【請求項9】
前記移動する地理的なターゲットエリアは、前記基準端末のロケーションを中心とした、予め規定された半径を有する円形のエリアである請求項8記載の方法。
【請求項10】
前記トリガイベントが起こっているか否かを決定することは、前記端末のロケーションが、前記移動する地理的なターゲットエリアに関する基準に一致する場合に、前記トリガイベントが起こっていると決定することを含み、前記基準は、前記移動する地理的なターゲットエリアの内にあるか、前記移動する地理的なターゲットエリアの外にあるか、前記移動する地理的なターゲットエリアに入るか、または、前記移動する地理的なターゲットエリアを離れるかである請求項7記載の方法。
【請求項11】
前記少なくとも1つのロケーション関連測定値が、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項12】
前記トリガイベントが起こっているか否かを決定することは、最後のトリガイベント以降の何らかの時間における前記端末の速度が、予め規定された速度を満たしているか、または、予め規定された速度を超えている場合に、前記トリガイベントが起こっていると決定することを含む請求項11記載の方法。
【請求項13】
前記トリガイベントが起こっているか否かを決定することは、前記端末の速度が、第1のレベルを下回り、その後、第2のレベルを満たすか、または、第2のレベルを超えた場合に、前記トリガイベントが起こっていると決定することを含む請求項11記載の方法。
【請求項14】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するもの、および、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定することは、前記端末が進行した距離と、前記端末の速度とに基づいて、前記トリガイベントが起こっているか否かを決定することを含む請求項1記載の方法。
【請求項15】
最後のトリガイベント以降に経過した時間にさらに基づいて、前記トリガイベントが起こっているか否かを決定する請求項14記載の方法。
【請求項16】
前記トリガイベントが起こっているか否かを決定することは、
複数の式を決定することと、
前記複数の式の関数に基づいて、前記トリガイベントが起こっているか否かを決定することとを含み、
各式は、予め規定された距離に関する前記端末が進行した距離に対するもの、または、予め規定された速度に関する前記端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものである請求項14記載の方法。
【請求項17】
前記トリガイベントが起こっていた場合に、報告を送ることをさらに含む請求項1記載の方法。
【請求項18】
前記端末と第2の端末との間で交換された少なくとも1つの信号に基づいて、前記端末に対する前記少なくとも1つのロケーション関連測定値を取得する請求項1記載の方法。
【請求項19】
前記少なくとも1つのロケーション関連測定値を取得するために、セキュアユーザプレーンロケーション(SUPL)メッセージを交換することをさらに含む請求項1記載の方法。
【請求項20】
ロケーションサービスをサポートする装置において、
端末に対する少なくとも1つのロケーション関連測定値を取得する手段と、
前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定する手段とを具備し、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものである装置。
【請求項21】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記端末が進行した距離に基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項22】
前記トリガイベントが起こっているか否かを決定する手段は、前記端末が進行した距離が、予め規定された距離を超えている場合に、前記トリガイベントが起こっていると決定する手段を備える請求項21記載の装置。
【請求項23】
前記少なくとも1つのロケーション関連測定値が、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項24】
基準端末のロケーションを決定する手段と、
前記基準端末のロケーションに基づいて、前記移動する地理的なターゲットエリアを決定する手段とをさらに具備する請求項23記載の装置。
【請求項25】
前記少なくとも1つのロケーション関連測定値が、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項26】
前記トリガイベントが起こっているか否かを決定する手段は、
最後のトリガイベント以降の前記端末の最高速度を決定する手段と、
前記最高速度が、予め規定された速度を超えている場合に、前記トリガイベントが起こっていると決定する手段を備える請求項25記載の装置。
【請求項27】
前記少なくとも1つのロケーション関連測定値が、前記端末が進行した距離に対するもの、および、前記端末の速度に対するものであり、前記トリガイベントが起こっているか否かを決定する手段は、前記端末が進行した距離と前記端末の速度とに基づいて、前記トリガイベントが起こっているか否かを決定する手段を備える請求項20記載の装置。
【請求項28】
前記トリガイベントが起こっているか否かを決定する手段は、
複数の式を決定する手段と、
前記複数の式の関数に基づいて、前記トリガイベントが起こっているか否かを決定する手段とを備え、
各式は、予め規定された距離に関する前記端末が進行した距離に対するもの、または、予め規定された速度に関する前記端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものである請求項27記載の装置。
【請求項29】
ロケーションサービスをサポートする装置において、
端末に対する少なくとも1つのロケーション関連測定値を取得するようにと、
前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定するように構成されている少なくとも1つのプロセッサを具備し、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものである装置。
【請求項30】
前記少なくとも1つのプロセッサは、前記端末が進行した距離を決定するようにと、前記端末が進行した距離に基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項31】
前記少なくとも1つのプロセッサは、前記端末が進行した距離が、予め規定された距離を超えている場合に、前記トリガイベントが起こっていると決定するように構成されている請求項30記載の装置。
【請求項32】
前記少なくとも1つプロセッサは、前記移動する地理的なターゲットエリアに関する前記端末のロケーションを決定するようにと、前記移動する地理的なターゲットエリアに関する前記端末のロケーションに基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項33】
前記少なくとも1つのプロセッサは、基準端末のロケーションを決定するようにと、前記基準端末のロケーションに基づいて、前記移動する地理的なターゲットエリアを決定するように構成されている請求項32記載の装置。
【請求項34】
前記少なくとも1つのプロセッサは、前記端末の速度を決定するようにと、前記端末の速度に基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項35】
前記少なくとも1つのプロセッサは、最後のトリガイベント以降の前記端末の最高速度を決定するようにと、前記最高速度が、予め規定された速度を超えている場合に、前記トリガイベントが起こっていると決定するように構成されている請求項34記載の装置。
【請求項36】
前記少なくとも1つのプロセッサは、前記端末が進行した距離と前記端末の速度とを決定するようにと、前記端末が進行した距離と前記端末の速度とに基づいて、前記トリガイベントが起こっているか否かを決定するように構成されている請求項29記載の装置。
【請求項37】
前記少なくとも1つのプロセッサは、
複数の式を決定するようにと、
前記複数の式の関数に基づいて、前記トリガイベントが起こっているか否かを決定するように構成され、
各式は、予め規定された距離に関する前記端末が進行した距離に対するもの、または、予め規定された速度に関する前記端末の最高速度に対するもの、または、予め規定された時間に関する経過した時間に対するものである請求項36記載の装置。
【請求項38】
コンピュータ読取可能媒体を具備するコンピュータプログラムプロダクトにおいて、
前記コンピュータ読取可能媒体は、
少なくとも1つのコンピュータに、端末に対する少なくとも1つのロケーション関連測定値を取得させるためのコードと、
前記少なくとも1つのコンピュータに、前記端末に対する少なくとも1つのロケーション関連測定値に基づいて、トリガイベントが起こっているか否かを決定させるためのコードとを含み、
各ロケーション関連測定値は、前記端末が進行した距離に対するもの、または、前記端末の速度に対するもの、または、移動する地理的なターゲットエリアに関する前記端末のロケーションに対するものであるコンピュータプログラムプロダクト。
【請求項39】
ロケーションサービスをサポートする方法において、
第2の端末の速度に対する要求を第1の端末により送ることと、
前記第1の端末において、前記第2の端末の速度を受信することとを含む方法。
【請求項40】
前記要求を送ることは、ロケーションセンターに前記要求を送ることを含み、前記第2の端末の速度を受信することは、前記ロケーションセンターから前記第2の端末の速度を受信することを含む請求項39記載の方法。
【請求項41】
前記要求を送ることは、ロケーションセンターに前記要求を送ることを含み、前記第2の端末の速度を受信することは、前記ロケーションセンターを通すことなく、前記第2の端末から直接、前記第2の端末の速度を受信することを含む請求項39記載の方法。
【請求項42】
前記第2の端末の速度を受信することは、前記要求に基づいて、複数回、前記第2の端末の速度を受信することを含む請求項39記載の方法。
【請求項43】
前記第1の端末と前記第2の端末との間で交換された信号に対する測定値に基づいて、前記第2の端末の速度を決定する請求項39記載の方法。
【請求項44】
ロケーションサービスをサポートする装置において、
第2の端末の速度に対する要求を第1の端末により送る手段と、
前記第1の端末において、前記第2の端末の速度を受信する手段とを具備する装置。
【請求項45】
前記要求を送る手段は、ロケーションセンターに前記要求を送る手段を備え、前記第2の端末の速度を受信する手段は、前記ロケーションセンターから前記第2の端末の速度を受信する手段を備える請求項44記載の装置。
【請求項46】
前記第2の端末の速度を受信する手段は、前記要求に基づいて、複数回、前記第2の端末の速度を受信する手段を備える請求項44記載の装置。
【請求項47】
ロケーションサービスをサポートする装置において、
第2の端末の速度に対する要求を第1の端末により送るようにと、
前記第1の端末において、前記第2の端末の速度を受信するように構成されている少なくとも1つのプロセッサを具備する装置。
【請求項48】
前記少なくとも1つのプロセッサは、ロケーションセンターに前記要求を送るようにと、前記ロケーションセンターから前記第2の端末の速度を受信するようにさらに構成されている請求項47記載の装置。
【請求項49】
コンピュータ読取可能媒体を具備するコンピュータプログラムプロダクトにおいて、
前記コンピュータ読取可能媒体は、
少なくとも1つのコンピュータに、第2の端末の速度に対する要求を第1の端末により送らせるためのコードと、
前記少なくとも1つのコンピュータに、前記第1の端末において、前記第2の端末の速度を受信させるためのコードとを含むコンピュータプログラムプロダクト。
【図1】

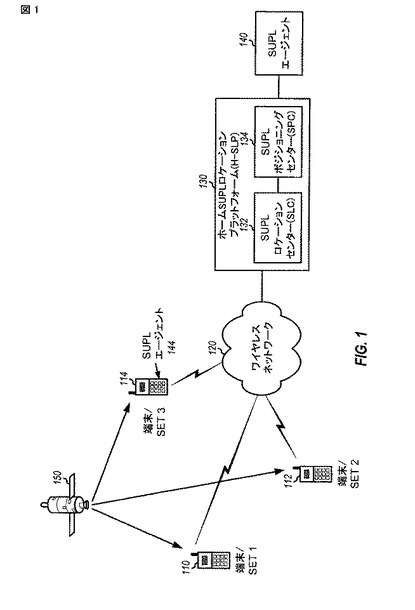
【図2】
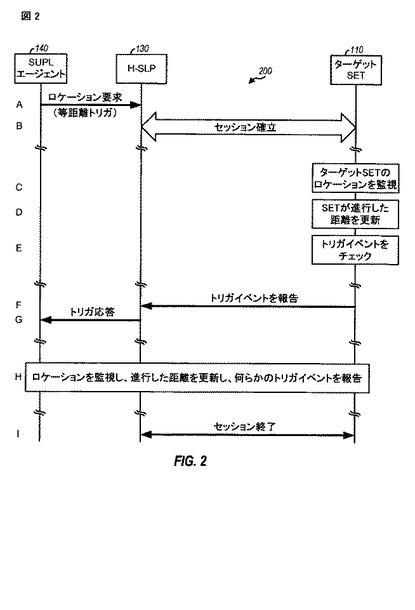
【図3】
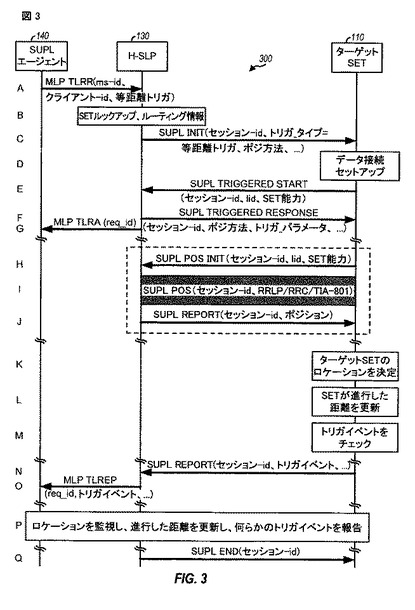
【図4】
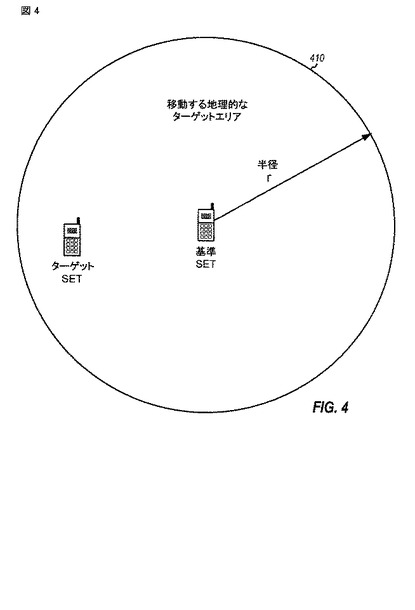
【図5】
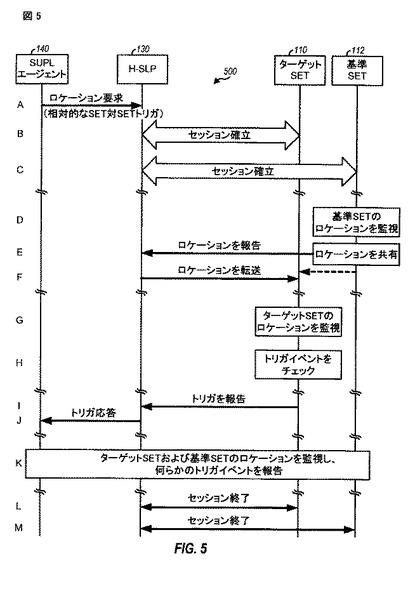
【図6】
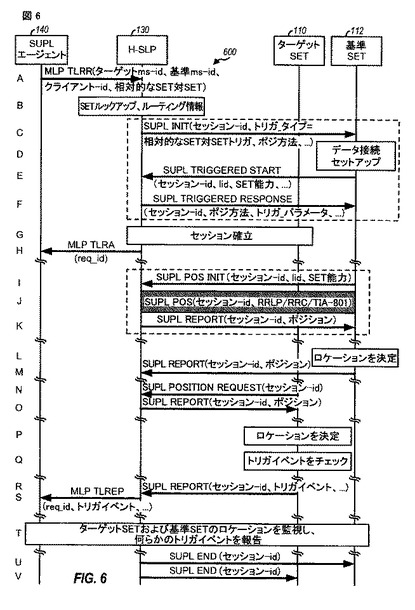
【図7】
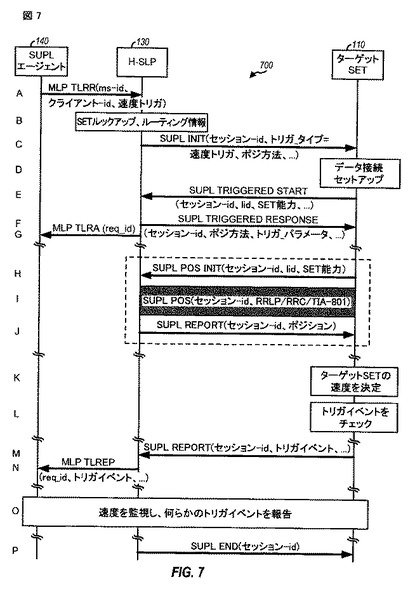
【図8】
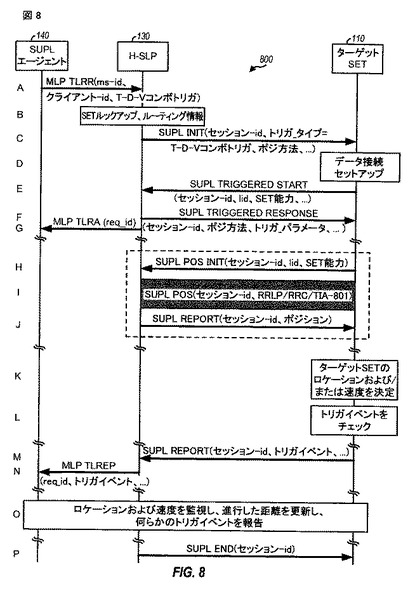
【図9】
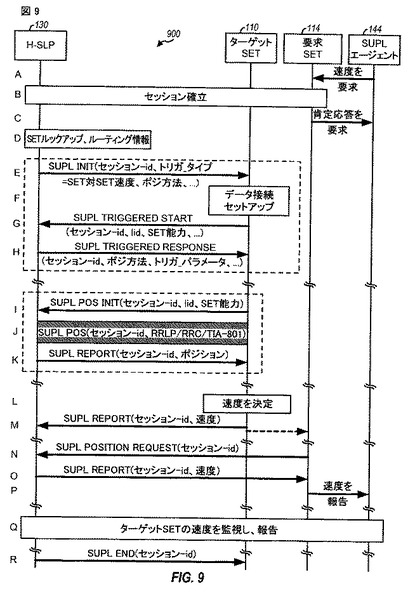
【図10】
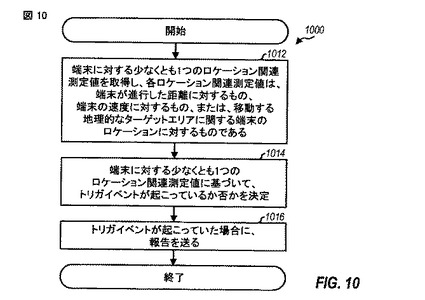
【図11】
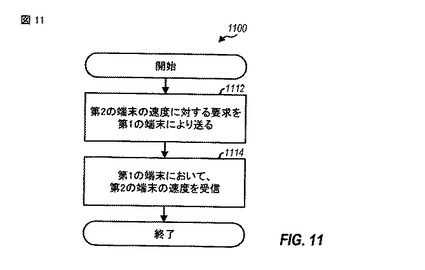
【図12】
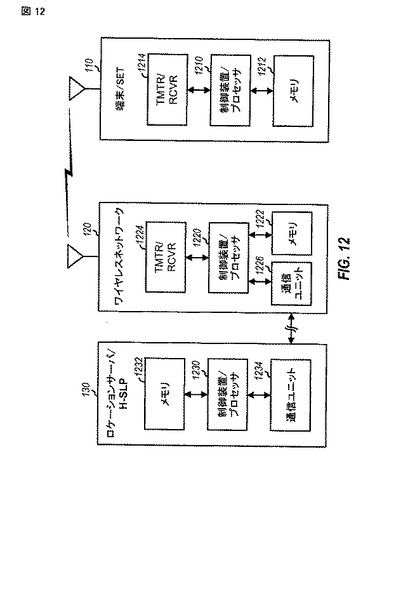
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2012−517746(P2012−517746A)
【公表日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−549337(P2011−549337)
【出願日】平成22年2月9日(2010.2.9)
【国際出願番号】PCT/US2010/023664
【国際公開番号】WO2010/091424
【国際公開日】平成22年8月12日(2010.8.12)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公表日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成22年2月9日(2010.2.9)
【国際出願番号】PCT/US2010/023664
【国際公開番号】WO2010/091424
【国際公開日】平成22年8月12日(2010.8.12)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]