
トリガー動作衛星測位
衛星測位システムからの信号を処理する方法。この方法は、第1のトリガー信号のタイミングおよび第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用することを含む。この処理方法は、データの捕捉および格納方法および/またはデータのその後の処理方法を制御することも含むことができる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、全地球測位システム(GPS)などのような衛星測位システムで信号を処理する方法に関する。詳細には、位置を決定するためにオフラインで処理するよう衛星放送が記録されるシステムに関する。
【背景技術】
【0002】
全地球測位システムは、6つの異なる軌道面にのった最高32機までの軌道衛星(宇宙飛行体「SV」と呼ばれる)のネットワークからなる、人工衛星に基づいたナビゲーション・システムである。システム設計上、24機の人工衛星が必要とされるが、人工衛星の数がさらに増えればサービス区域が向上する。これらの人工衛星は、常に移動し続けており、24時間未満で地球周回軌道を2回転する。
【0003】
人工衛星により送信されるGPS信号は、規則的に連続して反復される擬似乱数コードを使用する、直接シーケンス拡散スペクトルとして一般に知られる形態をとっている。人工衛星は、民間で自由に入手可能な粗い捕捉コード(C/Aコード:Coarse/Acquisitionコード)や普通は軍用とされる限定された精密コード(Pコード:Preciseコード)を含む様々な拡散コードにより複数の信号を放送する。C/Aコードは、チップ・レート1.023MHzで放送され1ミリ秒毎に反復される、1023ビット長の擬似乱数コードである。各人工衛星は、各人工衛星を一意に識別することを可能にする別個のC/Aコードを送信する。
【0004】
データ・メッセージは、各人工衛星によりC/Aコードの出だし部分で変調され、送信側人工衛星の詳細な軌道パラメータ(人工衛星軌道暦(エフェメリス)と称される)、人工衛星のクロックのエラーに関する情報、人工衛星の状況(健全、不健全)、今日の日付、および時刻のような重要情報を含む。信号のこの部分は、GPSレシーバが正確な位置を決定する際に不可欠である。各人工衛星は、それ自体のエフェメリスと詳細なクロック訂正パラメータとを送信するだけであり、したがって、GPSレシーバ単体では、位置計算に使用しようとする各人工衛星のデータ・メッセージの適切な部分を処理する必要がある。
【0005】
データ・メッセージはまた、他の全ての人工衛星に関する、あまり頻繁には更新されず正確さに乏しい情報を含むアルマナックと呼ばれるものも含んでいる。アルマナック・データによってGPSレシーバは各GPS人工衛星がいるべき場所を一日中いつでも推定することができるので、GPSレシーバは、探索すべき人工衛星をより効率的に選ぶことができるようになる。各人工衛星は、システム内の各人工衛星に関する軌道情報を示すアルマナック・データを送信する。
【0006】
従来のGPSレシーバは、送信されたデータ・メッセージを読取り、エフェメリス、アルマナック、および他のデータを連続して使用するために保存する。この情報は、GPSレシーバ内のクロックを設定(または訂正)するために使用することもできる。
【0007】
位置を決定するために、GPSレシーバは、ある人工衛星によって信号が送信された時刻をその信号がGPSレシーバによって受信された時刻と比較する。この時間の差違は、特定の人工衛星がGPSレシーバからどれだけ離れているかをそのGPSレシーバに伝える。複数の人工衛星からの距離測定を組み合わせることにより、位置を三辺測量術により取得することができる。最低3機の人工衛星があれば、GPSレシーバは、緯度経度位置(2次元位置決定)を決定することができる。4機以上の人工衛星があれば、GPSレシーバは、緯度、経度、高度を含む3次元位置を決定することができる。人工衛星から受信された情報は、GPSレシーバ内のクロックを設定(または訂正)するために使用することもできる。
【0008】
人工衛星からの信号の明らかなドプラ偏移を処理することにより、GPSレシーバは、移動速度および移動方向(「対地速度」および「軌道線」とも称される)を正確に提供することができる。
【発明の概要】
【発明が解決しようとする課題】
【0009】
現行のほぼ全てのGPSレシーバは、人工衛星からの信号が受信されるたびにその信号を「リアルタイムに」処理することにより機能し、現時点での装置の位置を報告する。このような「従来の」GPSレシーバは、常に以下のものを含む。
【0010】
− GPS信号を受信するために適切なアンテナ
− 所望の信号が通常は数MHzというサンプル速度で適切なアナログ/デジタル(A/D)コンバータを通過することができるように、所望の信号を増幅し、フィルタリングし、かつ中間周波(IF)にミックス・ダウンするよう設計されたアナログRF回路(GPSフロント・エンドと呼ばれることが多い)
− 信号処理ハードウェアを制御し、所望の位置決定を計算するために必要な「より高度な」処理を実行する何らかの形式のマイクロ・コントローラと通常は組み合わされる、A/Dコンバータにより生成されたIFデータ・サンプルで相関処理を実行するデジタル信号処理ハードウェア。
【0011】
「格納し、後で処理する」(「捕捉し、処理する」としても知られている)というそれほど良く知られていない概念も研究されている。これは、従来のアンテナおよびアナログRF回路によって収集されたIFデータ・サンプルを、後で(数秒後、数分後、数時間後、または場合によっては数日後)処理する前に、また、多くの場合は処理資源がより豊富などこか他の場所で、ある形式のメモリに格納することを必要とする。
【0012】
従来のGPSレシーバに対する捕捉し処理するという方法の主要な利点は、デジタル信号処理を捕捉時に行う必要がなく、グラブを非常に短くする(例えば、100ms)ことができるので、捕捉装置の原価および電力消費が最低に抑えられることである。関連する人工衛星データ(エフェメリスなど)を他の方法により取得することができる場合、後続の信号処理が行われると仮定すると、この方法は、多くの場合従来型装置を起動するために許容範囲を超えて長時間掛かる捕捉装置で、SVからの(非常に遅い)データ・メッセージを復号する必要性の除去も行う。
【課題を解決するための手段】
【0013】
本発明の一態様によれば、人工衛星測位システムからの信号を、第1のトリガー信号のタイミングのみならず第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して処理する方法が提供される。
【0014】
捕捉し処理する人工衛星測位は、広範囲に亘る応用例において有用である。記録されたデータ・サンプルを処理し使用する最良の方法は、応用例により異なる。したがって、特定のグラブ(ブロック)の目的が分かっている場合、この捕捉し処理する人工衛星測位はデータを処理する最良の方法に関してヒントを提供することができる。1ブロックのデータ・サンプルを捕捉するためのトリガーまたは要求に関する情報を使用することにより、データ・サンプルの捕捉および/または処理を、問題の特定応用例に関して最適化することができる。
【0015】
本発明の一実施態様では、処理することが、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、1つまたは複数のパラメータによる処理方法を使用して処理することを含む。
【0016】
第1のトリガー信号の1つまたは複数の記録されたパラメータは、トリガーの発信元装置を識別する情報およびトリガーの発信元装置のパラメータの少なくとも1つを含むことができる。
【0017】
トリガー信号が何らかの関連付けられたハードウェアの部分からの要求である場合、その装置とその装置の目的に関する知識は、データ・サンプルを処理する最も最適な方法を推定するために有用な前後関係を提供する。
【0018】
発信元装置はカメラであってよく、また発信元装置のパラメータは、フラッシュをたいたか否かを識別する情報、開口量、焦点距離値、ズーム値、光レベル値、露出時間、被写体距離、配向を識別する情報、およびシーンタイプを識別する情報の少なくとも1つを含むことができる。
【0019】
発信元装置がカメラであることは、所望の応用例がこの画像にジオタグを付けることを示す場合がある。この場合、目標は、通常、格納されたデータ・サンプルのブロックを使用して、所与の写真が撮影された場所に対応する位置決定を計算することである。写真が撮影された時のカメラ・パラメータの知識は、その写真が撮られた状況に関する情報を推定するために使用することができ、その推定された情報は、続いて、位置を推定するために特定の方法を指定することができる。
【0020】
発信元装置は、モーションセンサー、加速度センサー、および配向センサーの少なくとも1つを含むことができる。
【0021】
第1のトリガー信号の1つまたは複数のパラメータは、トリガーの日付/時刻、距離測定、コンパス方位、加速度測定、高度測定、歩数、および車輪回転数の少なくとも1つを含むことができる。
【0022】
1ブロックのデータ・サンプルを記録することに関連する物理的状況に関して感知された情報は、導出された位置情報の所期の応用例またはそれを計算する最適な方法に関する有用なインジケータを提供することができる。
【0023】
この方法は、追加の情報を導出するために、記録されたブロックを、第2のトリガー信号の1つまたは複数の記録されたパラメータを使用して処理することをさらに含むことができる。
【0024】
ブロックの捕捉に関連したトリガーに関する情報は適切な処理方法に関する有用なインジケータを提供することができるので、他のトリガーから収集される情報(例えば、問題のブロックの前後近くのトリガー)により、その前後関係の知識をよりさらに増加させることができる。
【0025】
有利には、記録されたブロックの処理は、第1のトリガー信号の記録されたパラメータによりソフトウェア・アプリケーションを起動することを含むことができる。
【0026】
最も関連するプログラムを、グラブの意味論上の重要性に従って選ぶことができる。これを選ぶことによって、ユーザからの追加入力を必要とせずに効率的な処理が可能になり、全ての情報を完全に活用することが保証される。
【0027】
有利には、記録されたブロックの処理は、位置情報の導出を簡素化するために、第1のトリガー信号の記録されたパラメータを使用することを含むことができる。
【0028】
トリガー信号の詳細な知識に基づいて様々な推定が可能になる。例えば、時間または位置の大まかな推定を行うことができる場合、人工衛星信号サンプルの処理は事実上さらに効率的に行うことができる。
【0029】
本発明の別の実施態様では、処理することは、トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプル、トリガー信号の1つまたは複数のパラメータにより記録することの少なくとも1つのパラメータを記録することを含むことができる。
【0030】
トリガー信号の詳細な知識を即座に得ることで、捕捉パラメータをその状況に対して最適化することが可能になる場合がある。例えば、応用例によって、より高度なエラー強さを要求する場合のあるものと、捕捉状況が有利になる可能性のあることを示す場合のあるものとがある。
【0031】
この方法は、少なくとも位置情報を導出するために、記録された数ブロックのデータ・サンプルをプロセッサに提供することをさらに含むことができる。
【0032】
記録することの少なくとも1つの第1のパラメータは、記録されるデータ・サンプルの数であってよい。
【0033】
この方法で、グラブの長さを、例えばトリガーのタイプにより予期される環境状態について最適化することができる。グラブの長さを最小に保つことにより、レシーバの電力消費とストレージ・オーバーヘッドの両方が低減される。同時に、ユーザは、捕捉が完了するまで最小の時間だけ待てばよい。サンプルから位置決定が計算される場合、グラブを短くすることによって、後の処理負荷を低減することもできる。
【0034】
トリガー信号の少なくとも1つの第2のパラメータは、トリガーの発信元装置を識別する情報およびトリガーの発信元装置のパラメータの少なくとも1つを含むことができる。
【0035】
トリガー信号が何らかの関連付けられたハードウェアの部分からの要求である場合、その装置とその装置の目的に関する知識は、データ・サンプルを記録する最も最適な方法を推定するために有用な前後関係を提供する。
【0036】
発信元装置はカメラであってよく、また発信元装置のパラメータは、フラッシュをたいたか否かを識別する情報、開口量、焦点距離値、ズーム値、光レベル値、露出時間、被写体距離、配向を識別する情報、およびシーンタイプを識別する情報の少なくとも1つを含むことができる。
【0037】
写真が撮影された時のカメラ・パラメータの知識は、その写真が撮られた状況に関する情報を推定するために使用することができ、その推定された情報は、続いて、最適な記録パラメータの特定セットを指定することができる。
【0038】
発信元装置は、モーションセンサー、加速度センサー、および配向センサーの少なくとも1つを含むことができる。
【0039】
トリガー信号の少なくとも1つの第2のパラメータは、トリガーの日付/時刻、距離測定、加速度測定、歩数、および車輪回転数の少なくとも1つを含むことができる。
【0040】
1ブロックのデータ・サンプルを記録することに関連する物理的状況に関して感知された情報は、その最適な実行方法に関する有用な指示を提供することができる。
【0041】
この方法は、トリガー信号のパラメータを記録すること、および記録されたパラメータを処理システムに提供することをさらに含むことができる。
【0042】
したがって、トリガーのパラメータは、ブロックの最良の捕捉方法を決定する際にオンラインで、またブロックの最良の処理方法を決定する際にオフラインで使用することができる。
【0043】
本発明の別の態様によれば、衛星測位システムからの信号を処理するための機器であって、第1のトリガー信号のタイミングのみならず第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して信号を処理するようになされた処理手段を含む機器が提供される。
【0044】
一実施態様では、処理手段は、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、1つまたは複数のパラメータによる処理方法を使用して処理するようになされたプロセッサであってよい。
【0045】
別の実施態様では、処理手段は、トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプル、トリガー信号の1つまたは複数のパラメータにより記録することの少なくとも1つのパラメータを記録するようになされた記録手段である。
【0046】
したがって、本発明の方法および機器は、データ捕捉の実行方法および/または捕捉されたデータの処理方法を制御するトリガー情報を使用することができる。
【0047】
本発明を、添付の図面を参照して例示により説明する。
【図面の簡単な説明】
【0048】
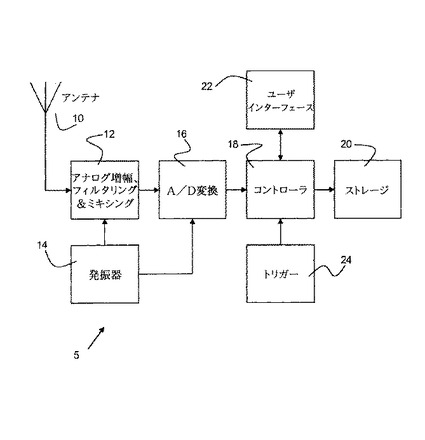
【図1】本発明の一実施形態によるGPSレシーバの図である。
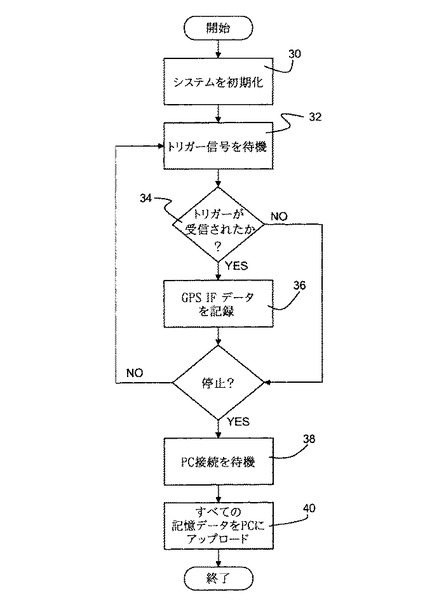
【図2】一実施形態によるトリガーされた捕捉および処理データを記録する方法を示す図である。
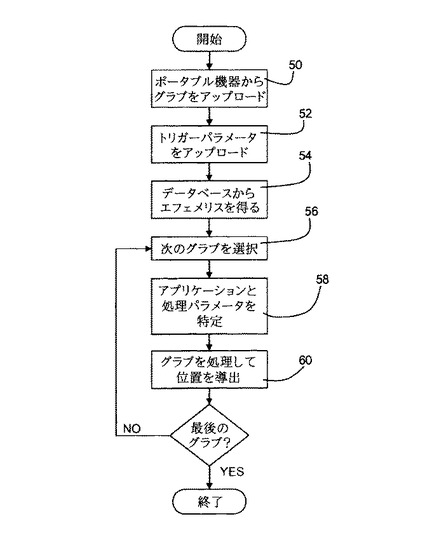
【図3】一実施形態によるトリガーされた捕捉および処理データを処理する方法を示す図である。
【発明を実施するための形態】
【0049】
本発明は、GPSデータのような格納された衛星測位システム・データを処理する複数の方法を提供する。これらの方法は、レシーバからGPS信号処理機能を除去し、この機能を遠隔で実施することが望まれる多くの捕捉および処理応用例で使用することができる。
【0050】
典型的な応用例では、IFデータ・サンプルの短いブロック(以下の説明では「グラブ」と称する)をメモリに格納する小型捕捉装置は、1つまたは複数の従来型GPSレシーバがそれら自体で受信したGPSデータ・メッセージの主要部分を中央コンピュータに中継する1つまたは複数の従来型GPSレシーバに接続されることにより、そのIFデータ・グラブを引き続き共有の中央コンピュータにアップロードすることができるが、ここで、この共有の中央コンピュータは、必須の信号処理(訂正など)を実行するだけでなく最近の衛星情報(エフェメリスなど)のデータベースにアクセスもするものである。
【0051】
特に、本発明は、レシーバが何らかの刺激に応じて捕捉をトリガーするためのトリガー機構を含むか、または通信インターフェースを介して他の装置から類似のトリガー信号を受信するようになされた捕捉および処理応用例に対応する。そのようなレシーバは、トリガーによってIFデータ・サンプルを捕捉するよう要求された際にそれを実行するだけなので、不要なグラブを捕捉し格納する時間、エネルギー、および記憶空間を浪費することがない。したがって、連続して周期的グラブを捕捉する装置と比較して、電力消費量および記憶資源の使用量は最適化されている。捕捉および処理の方法は、複素信号処理ハードウェアに電力供給する必要がないという意味で既にエネルギー効率が良いが、トリガーされたグラブがあれば、電池の寿命をさらに延長することができる。さらに、「ブラインド」(トリガーされない)定期的グラブという他の方法と比較して、トリガーは、グラブがそれをトリガーするイベントの場所と正確に一致することを保証する。
【0052】
しかし、トリガーが使用できることは、グラブ数を低減するために有用なだけではない。トリガーに(明示的に、または暗黙で)含まれる情報を、トリガーされたグラブの記録および/または後での処理を案内するために使用することができる。
【0053】
レシーバで各グラブを記録することを最適化するためにトリガーのパラメータが使用される、本発明の第1の態様を次に説明する。
【0054】
図1は、本発明による方法を実施するようになされた、捕捉および処理GPSレシーバ5のシステム図である。GPS衛星からの信号は、アンテナ10により受信され、次いで従来型アナログ処理に掛けられるが、この従来型アナログ処理は、通常は、参照オシレータ(発振器)14(通常は、温度補償水晶)により駆動されるユニット12における増幅、フィルタリング、およびダウン・ミキシングの組み合わせと、それに続くユニット16におけるA/D変換を含んでいる。これは、RFフロント・エンドを形成する従来型ラジオ・レシーバ・エレクトロニクスである。
【0055】
関連付けられたファームウェアと共に離散論理またはマイクロ・プロセッサとして実施されるコントローラ18は、RFフロント・エンドにより生成され、次いでフラッシュRAM、ハードディスクなどのようなストレージ装置20に記憶される、サンプリングされたIFデータの捕捉を制御する。この実行方法は、ユーザの設定(GUI22により入力される)とトリガー22により影響される。トリガー24は、図示するように内部トリガーであっても、外部装置(図示せず)から受信した信号への応答であってもよい。
【0056】
好適には、コントローラは、RFフロント・エンド、A/Dコンバータ、およびストレージ装置を低電力待機状態に保ち、トリガーからの指示でデジタル化されたサンプルをいつでも捕捉できる状態にしておく。
【0057】
トリガーされると、装置はRFフロント・エンドからIFデータの短いブロックを記録する。デフォルトのグラブは、例えば100msの長さであってよい。しかし、特定のグラブに関するトリガーに含まれる情報は、コントローラ18に、より長いグラブまたはより短いグラブを捕捉させることができる。使用される正確な値は、ユーザによりGUI22を介してさらに調節することができる。別の応用例では、異なる長さのグラブが適切になろう。したがって、グラブをトリガーするためだけでなく、グラブの長さを無条件で変調するためにもトリガーを使用することにより、レシーバは、変化する条件および要件に適応することができる。通常、各グラブは、サブフレームの持続期間6秒、好適には500msより短くなる。
【0058】
コントローラにより実施される論理を、図2を参照しながら説明する。「システムを初期化する」ステップ30は、デフォルトのグラブのあるべき長さを選択することを含む。次いでコントローラは、トリガー信号を短期間の間待ち受けるループに入る(ステップ32)。トリガーが受信されない場合、コントローラは、ユーザがデータの記録を停止するよう命令したか否かを確認する。またはトリガーが受信された場合は、ステップ36で、1つのグラブのGPS IFデータが、そのトリガーに従い選ばれたパラメータと共に格納される。次いでコントローラは、トリガーを確認するループに戻り、命令を停止する。記録が一度終了すると、ステップ38はデータをダウンロードできるかを監視し、ステップ40は記録されたグラブのアップロードを、後続処理のために、あるPCに関係付ける。ステップ34と36でのグラブのトリガーは同期的であってよいが、好適には、グラブが受信直後に任意の追加の遅滞なく捕捉されるように非同期である。
【0059】
本方法は、様々な応用例で有用である場合がある。デジタル写真の応用例では、例えば、写真の撮影またはムービー・クリップの記録が、捕捉および処理GPSレシーバがIFグラブを捕捉するようトリガーすることができる。レシーバは、カメラに内蔵されていても、または外部付属品として提供されてもよい。後者の場合、レシーバは、トリガー信号をカメラからレシーバに渡すことを可能にする通信リンクによりカメラに接続される。標準カメラのホットシュー(外部フラッシュ・ユニットをカメラに接続し、同期させるために使用されることの多い種類)を、この目的で使用することができる。一般的にはIFグラブのトリガーと捕捉の間の厳密な同期が望ましいが、場合によっては、写真を撮影するタスクとグラブを捕捉するタスクをわずかにインターリーブまたはオフセットすることが有利な場合があることに留意されたい。例えば、フラッシュの放電により生じたインパルス雑音が、受信したIFデータ・サンプルにエラーを生じる可能性があるので、人工衛星信号の干渉を最低限に抑えるには、グラブは、フラッシュと同時ではなく、フラッシュをたく前後に記録することができる。
【0060】
GPSレシーバは、トリガーする際に、カメラにより提供される情報に従いデータ・サンプルを捕捉する。例えば、フラッシュがたかれ、被写体との距離(オートフォーカス・システムにより測定された)が短いことをカメラがレシーバに伝えた場合、レシーバは、その写真は屋内で撮影されている可能性が高いと推定することができる。一般的に、建材は人工衛星からの電波信号を減衰させるので、信頼できる人工衛星測位を屋内で達成することは、さらに困難である。この場合、レシーバは、劣ると予想される信号状態のエラー強さを高めるために、トリガーされたグラブの長さを延長することができる。
【0061】
従来型の「リアルタイムな」GPSと比較して、捕捉および処理のパラダイムの不利な点の1つは、十分な数の人工衛星が位置決定の導出を可能にするために、信号雑音比(SNR)が十分に高いか否かが、グラブを捕捉する時点では認識されていないことである。全ての処理が「オンラインで」実行されるので、従来型GPSレシーバは、人工衛星データ信号を獲得する際に類似の問題を経験する場合があるが、それが発生した時点で少なくとも信号損失には気付く。低いSNRの作用を緩和する1つの方法は、受信した信号のより長い持続時間を処理することである。残念ながら捕捉および処理レシーバの場合は、格納されたサンプルが処理され、その時点までは追加サンプルを捕捉することによって問題を改善することは不可能なので、信号損失は後にならないと明らかにならない。その結果、一方では必要なエラー強さを達成するために十分長いグラブを捕捉すること、もう一方では捕捉における時間、電力、およびストレージ・オーバーヘッドを最低限に抑えることの間で固有のトレード・オフが生じる。トリガーのパラメータ(本実施例ではフラッシュと焦点距離)は、したがって、所与の一組の状況にトレード・オフを適応させる貴重な情報源である。
【0062】
他のカメラのパラメータを推定に使用することができる。写真が屋内で撮影されているか屋外で撮影されているかを予測するために、開口、露出時間、照度、または輝度の知識を等しく使用することができる。さらに、多くの現代のカメラは、カメラ捕捉パラメータを最適化するために使用される、「屋内」、「屋外」、「景色」、または「ポートレート」のようなユーザが選択可能なモードを内蔵している。これらのモードは、GPSグラブをトリガーする際に、前後関係の情報のさらに直接的な源として使用することができる。
【0063】
グラブの長さに影響を与えることに加え、カメラのパラメータは、他の方法で捕捉に影響を与えるために使用することができる。例えば、カメラに内蔵されたGPSレシーバは、信頼性を高めるために多様なアンテナを組込むことができる。このようなシナリオでは、その配向で最強の信号を受信できる可能性の高いアンテナの知識に基づいて、それらのアンテナの1つを選択するために、カメラによって提供される配向情報を使用することができる。
【0064】
他の応用例では、捕捉の様々なパラメータを変化させることが適切である場合がある。例えば、アナログ・デジタル変換16のサンプリング・レートまたはビット解像度を、変更可能なエラー強さ、電力消費量、正確さ、および耐電波障害性を提供することができる。当業者には容易に明らかになろうが、サンプリング・レートおよび解像度のパラメータとグラブの長さのパラメータとの間には、固有の設計上の妥協がある。
【0065】
同様に、他の応用例では、異なるインジケータがこれに当てはまる。例えば、ゴルフのジオタグの応用例では、スイング毎にグラブをトリガーすることができる(ゴルフクラブ内のセンサーによって自動的に検出される可能性のある)。ゴルフのストロークは高い確率で屋外での活動であることを認識すれば、グラブの長さもしたがって低減することができる。
【0066】
一方、自転車に乗っている場合は、速度の推定によって推測をすることができる。グラブの捕捉は、固定された車輪の回転数によってトリガーすることができ(グラブ捕捉速度は移動速度に自動的に適応されるので、本質的に有用であることに留意されたい)、またトリガーとトリガーの間の時間を測定することによって、平均速度の大まかな推定を導出することができる。より速い速度は、より良好な人工衛星の受信を有し、より短いグラブを指令するオープン・エリアを暗示する場合があり、遅い速度は、停滞、劣った人工衛星の受信、およびそれに対応してより長いグラブを暗示する場合がある(これは、密集した都会の環境内のみならず、例えば自然の障害物のある密林内で、等しくオフロードで適用することができる)。トリガーすることが、移動した固定距離にリンクされていないとしても、それでもなお、速度は、記録することのパラメータを制御するために使用することができることに留意されたい。例えば、時刻を合わせた捕捉の周期の増加は、速度が速くなったことを示すトリガーに応じて増加する場合がある。
【0067】
好適には、トリガー信号のパラメータは、各IFグラブと共に格納することができる。多くの応用例では、追加情報を記録することは本質的に有用であろう。例えば上記で強調したゴルフのシナリオにグラブを捕捉する際、特定のストロークに使用したクラブを記録することはゴルファーにとって関心のあることであろう。さらに、そのような記録されたパラメータは、サンプルを処理する後処理方法を構成するために後で使用することができる。格納されたパラメータは、捕捉処理に影響を与えるために使用されたパラメータと同じであっても、異なっていてもよい。
【0068】
レシーバからのアップロードに引き続き、各グラブの処理を最適化するためにトリガーの記録されたパラメータが使用される本発明の第2の態様を次に説明する。
【0069】
図3は、本発明の一実施形態による処理方法を示す。この方法は、例えば記録されたIFグラブを処理するパーソナルコンピュータによって実施することができる。
【0070】
ステップ50で、記録されたグラブがレシーバ5からアップロードされ、ステップ52で、詳細なパラメータ情報を含めて記録されたトリガーがアップロードされる。各アップロード動作は、有線、無線、または赤外線リンクを含めていかなる使用可能な通信リンクをも利用することができる。通常、リンクはステップ50と52の両方に共通している。
【0071】
ステップ54で、コンピュータは、インターネットを介して入手可能なエフェメリスのようにGPS人工衛星に関するエフェメリスデータをデータベースから取得する。別個の源からの完全なエフェメリスデータ(記録されたIFグラブ以外の)の入手可能性は、多数の利点をもたらすものである。そのデータは、位置推定を最低の長さのグラブから導出することを可能にするか、またはコンピュータで最小の処理作業で同様のことを行うことを可能にすることができる(以下で、より詳細に説明する)。
【0072】
次いでコンピュータは、ステップ56でグラブを選択し、ステップ58では、起動すべき最も最適なソフトウェア・アプリケーション、および/またはアップロードされたトリガーのパラメータに基づいて位置決定を導出するために最も最適なコンピュータ戦略を識別して、アップロードされたグラブおよび関連付けられたトリガーを反復する。
【0073】
グラブ毎に、ステップ60の処理は位置推定を決定する。この処理は、当業者には良く知られているであろう。この処理は、本質的に、可能な限り多くのSVの信号に関するIFサンプルの検索と、その後に続いてそれらの信号の飛行時間の推定および位置を導出するための三辺測量術を必要とする。この段階で、上記検索を導くために、ダウンロードされたエフェメリスデータを使用することができる。例えば、グラブの捕捉時間と各SVの経時的位置とが分かっているので、一定のSVだけが所与の位置のレシーバに見えることになる。したがって、複数のSVの1つに対応する信号が一度見つかると、同時には見えない多数の他のSVを検索から除去することができる。
【0074】
連続するグラブは連続して処理することができる。この処理により、連続するグラブが近接した位置と時間を表すことに基づいて、検索をさらに制限することができる。例えば、1つのグラブで見つかったSV信号は、その順序において先行するグラブと後続のグラブに存在する可能性が非常に高く、検索はそのような複数のSVを優先することができる。
【0075】
検索戦略の改善は、格納されたトリガーのパラメータが処理を強化することのできる1つの方法である。上記のデジタル・カメラの応用例に戻ると、写真が所与の捕捉時間(カメラの内部クロックにより決定される)で「ナイト」モードで撮影された場合がある。カメラのユーザの国の標準時間帯を仮定することによって、写真撮影の場所(また、したがって関連付けられたIFグラブ)は、その捕捉時間に夜間になる地球上の部分に即座に限定することができる。これは次いで、そのグラブに存在する可能性のある人工衛星データ信号を導出するためにエフェメリスデータと共に使用することができる。
【0076】
場所の絶対的な推定を推測することのみならず、関連する推測を行うためにトリガー情報を使用することもできる。例えば、トリガーは、固定数の自転車の車輪の回転などのような距離測定に関連付けることができる。このような距離でトリガーされたグラブは次いで、前の(後の)グラブからの所与の固定された距離以下であると仮定することができる。この知識は、人工衛星がそのグラブを獲得することを失敗した場合に、より長い順序において1つのグラブのための位置決定を導出するために、極端な場合に使用することができる。可能な場所の軌跡は、固定された半径の2つの円の交点によって制限され、失敗したグラブの直前および直後にトリガーされるグラブを中心として描かれる。車輪の回転によって直接的にグラブの捕捉がトリガーされないとしても、それでもなおグラブと共に回転数が記録されれば、同じ結果を達成することができることに留意されたい。
【0077】
上記の自転車の車輪センサーの場合は、距離情報を位置センサーから導出することができ、また、場合によっては加速度センサーから導出することができる。例えばランニングシューズの場合、事前定義した歩数の間隔後にIFグラブをトリガーするために加速度計を使用することができる。経時的に、平均的な歩幅を大まかに一定であると仮定することができるので、位置を推定するために連続したグラブを処理する場合には、類似の最大距離の半径を設定するためにその歩幅の数を使用することができる。
【0078】
他のシナリオには、動きのある場合にはいつでもグラブをトリガーすることが適切である場合がある。反対に、トリガーされたグラブ間に動きが検出されない場合、その処理は、その連続したサンプルが同じ位置に関連するという高い確実性を有することができる。
【0079】
距離または速度の正確な測定値が入手不可能な場合であっても、サンプルの後続の処理においては、グラブが所与の活動の分脈でトリガーされるという知識だけが有用な場合がある。例えば、自転車をこいでいる状況またはランニングしている状況では、特異の位置の大まかな推定を導出するために、グラブ間の時間を活動の力学に関する一般的な仮定と共に使用することができる。
【0080】
トリガーのパラメータは、推定を行うために外在的情報と組み合わせることもできる。例えば、ゴルフのジオタグの応用例では、ストローク毎にグラブをトリガーすることができる(これは、ゴルフクラブ内のセンサーによって自動的に検出することができる)。サンプルが後で処理される場合、ユーザが常に訪れるゴルフコースの外在的知識を、位置推定処理の開始点として使用することができる。初期の曖昧性を低減することによって、ここでもまた、正確な位置推定を、迅速に最短の長さのグラブによって計算することができる。
【0081】
本発明による方法は、位置推定の導出で援助するのみならず、導出されたGPSの位置を同化させるために適切なソフトウェア・アプリケーションの選択で援助することができる。したがって、カメラからグラブをトリガーした場合、場所名を写真に割り当てるために地理情報システム(GIS)データベースを潜在的に参照して、写真ジオタグのアプリケーションを起動することができる。同様に、ゴルフスイングによりトリガーされるグラブの場合、スペシャリストGISデータベースからダウンロードして、ラウンド全体でのプレーを分析し、使用したゴルフクラブ(および関連する飛距離)を記録し、そのコースのパー情報も含めて自動的にスコアを計算するプログラムを起動することができる。
【0082】
複数のソフトウェア・プログラムから選択する機能は、1つの捕捉および処理GPSレシーバを複数の多様なセンサーまたは装置で共用する(すなわち、トリガーされる場合がある)場合には特に有益である。したがって、ゴルフコースで撮影された写真は写真管理ソフトウェアによって自動処理することができ、ゴルフストローク・データはゴルフ・ソフトウェアによって扱うことができる。
【0083】
様々なソフトウェアが適切な場合があるが、使用可能な情報を最大限活用するために、多様なトリガーに関連付けられた近接したグラブを相互参照することができる。例えば、ゴルフコースで複数のゴルフストローク間で頻々と写真が撮影されるだけでなく(上記のように位置ブートストラップを可能にして)、写真管理ソフトウェアによってそれらの写真は「ゴルフ」という項目にセマンティックに分類される。これらはどちらも、状況に基づいて、捕捉したIFデータの処理をさらに強化するために第2の、追加のトリガーをどのように使用することができるかを示す例である。第1のトリガー(カメラ・トリガー)は写真自体に関連付けられており、追加のトリガーはゴルフストロークに関連付けられている。これらのトリガーは、時間的な近似性に基づいて相互参照することができるか、またはリンクされることができる。位置を導出するための写真に関連付けられたデータ・サンプルの処理は、ゴルフコースが撮影地である可能性が高いという知識により、ブートストラップすることができる。別の例では、前例と同様に、写真管理ソフトウェア・アプリケーションを起動するために第1のトリガー(カメラ・トリガー)が使用される。次いで写真の状況を推測するために第2の(ゴルフ)トリガーが使用され、その結果、同ソフトウェアにより写真は「ゴルフの写真」と分類され類別される。
【0084】
上述のように、関連付けられたトリガーの知識に基づくIFグラブの改善された処理は、可能で有効なGPS位置推定の範囲を限定するために、曖昧性を連続的に除去することを含むことが多い。徹底した説明のために、曖昧性を除去するための適切な技術をより詳細に次に説明する。
【0085】
特定の人工衛星からの信号を識別するには、その人工衛星が使用していることが分かっているC/Aコードのレプリカを生成し、そのレプリカが入来信号と同期するようにそのレプリカを整列させることが必要となるが、ここで、入来信号は、大部分は人工衛星からレシーバまで信号が移動する飛行時間のために、不明の期間(通常は約0.07秒)だけ遅延する。一般に、レプリカを入来信号と同期させるために必須の整列を正確に予測することは不可能なので、次に複数の整列を試行し最適な対を選択する、ある形式の検索が要求される。複数の候補の整列を評価するこの処理は、特定SVからのC/Aコードを有する成分を受信信号が含むか否かを決定するために、次に人工衛星毎に受信信号と既知のC/Aコードの間の相関機能として共通して実施される。相関機能は、複数の関連するタイミングについて計算される必要があり、相関のピークが見つかると、それは特定のタイミングおよび特定のSVに対応する。見つかったタイミングは、次に、そのSVから特定の距離に対応する。
【0086】
決定されたコードの位相、すなわち相関機能のピークのタイミングは、距離計算で使用するための正確なタイミング情報を示す。しかし、コードはミリ秒毎に反復されるので、大まかなタイミングを決定する必要もある。通常、従来型のリアルタイム・レシーバでは、サブフレーム・プリアンブルまたはサブフレーム・ハンドオーバー・ワードなど、50bpsデータ・メッセージの個別ビットおよびその特定部分のようなより大まかなタイミング推定(すなわち、GPS時間を導出することを可能にする)には、頻繁には反復されないデータ成分が使用される。
【0087】
相関機能が実行される統合期間によって、特定コードで符号化された信号をいかに容易に識別できるかが決定されるが、一般には、統合期間が長いほど、所与の信号強度に関して正確なコード位相がより確実に報告されるべきである。検出されるべき信号が弱いほど、同程度の信頼性を達成するには、より長い統合期間が必要となる。
【0088】
短いグラブは、コード位相測定を取得することを可能にする。しかし、コード位相測定だけでは、遅延が1ミリ秒のどの位わずかであるかは示すがミリ秒の整数は示さないので、曖昧である(先に指摘した通り)。したがって、例えば100msのIFデータ・コードの単一グラブは、明瞭な位置を計算するための十分な情報をそれ自体には含まない。
【0089】
より効率的により良い結果を提供するために、おおよその位置(または時間)を使用することができる。例えば、他の情報を付けずに単一のグラブが与えられた場合、全ての可能なコード位相および搬送周波数で全ての32機のSVを検索することは必須である可能性がある。検索が必要とされる搬送波周波数の範囲の大きさは、GPSフロント・エンドの発振器の品質(1ppmのエラーを有する発振器はL1信号のIFで1.5kHzのエラーをもたらす)と信号に対する可能なドップラー・シフト(地球の表面から観測されるSVは、通常はプラスマイナス4kHzの範囲のドップラー・シフトを有しており、レシーバの動きはこれを増加させることができる)により決まる。
【0090】
位置推定は、位置決定に要求される処理を低減することができる。具体的には、上述したコード位相測定のタイミングの曖昧性を克服するために、位置のおおよその知識を使用することができる。電波信号は1msに約300km移動するので、150km半径内の位置を知っていれば曖昧性は全くないことになる。位置推定がこの150km以内の精度でないとしても、視界に入るSVを決定することがまだ可能な信号の処理を手伝うことはできる。つまり、相関計算を減らすことができるということである。
【0091】
位置推定はSV信号の明白なドップラー・シフトから導出することができることが知られている。この推定は正確ではないが、飛行時間推定に関連付けられた曖昧性の問題は生じない。したがって、擬似距離測定値の曖昧性を除去するため、また、次いで正確な位置を導出するために、ドップラー・シフトを使用したおおよその位置決定を使用することができる。
【0092】
同様に、タイミングの曖昧性を直接的に削除するために時間推定を使用することができる。
【0093】
同じ装置が類似の時間に記録した一群のグラブが処理される場合、1つのグラブであるSVが検出されると、他のグラブでも同じSVが検出可能となる可能性が高まる。さらに、あるSVが存在することが一度分かると、それと地球の反対側にあることが分かっている全てのSVを除外することができる。さらに、所与のSVの搬送周波数は非常にゆっくり変化するので、行うべき周波数検索サイズを潜在的に制約して、時間的に近似したグラブ内の搬送周波数を予測するために1つのグラブ内の搬送周波数の知識を使用することができる。最後に、複数グラブ間の時間差をどれだけ正確に決定することができるかにより、データ・メッセージ内の位置を予測することができ、1つのグラブからのビット・エッジの位置またはコード位相さえも検索をさらに容易にかつ/またはさらに信頼性高くする全ての情報。
【0094】
上記で説明した通り、位置/速度決定を確立するには、エフェメリスデータによって伝達される、SVの正確な軌道パラメータとそれらSV搭載のクロックのエラーを取得することが必要である。これらは、通常のデータ・メッセージの一部としてSVにより放送され、30秒毎に反復される。そのようなデータを多数の短いIFグラブから抽出することは理論的には可能であるが、実際には、1つまたは複数の参照局にそのデータを収集させ、グラブを処理することを望むいかなるPCからでもアクセスできるデータベースに取り込ませる方が遙かに効果的である。
【0095】
本発明は、トリガーのパラメータからグラブを捕捉し処理するために、それぞれのパラメータを推定する機能にも依存している。これらは、(上記の例に示すように)規則に基づくか、またはさらに高度な統計的推定方法に基づいてよい。当業者には、適切な推定方法は容易に明らかになろう。
【0096】
以上、本発明を、(単一周波数の)GPSに関連して説明したが、他のGNSSシステム(GLONASS、Galileoなど)も同様である。確かに、この技術はまた複数の周波数システムに適用することができる。
【0097】
GPSは幾つかの異なる周波数で送信する。現在、民間ユーザは単一周波数にしか関心はないが、公に使用可能な他の複数の周波数の計画がかなり進められており、例えばGalileoによってカバーされることになろう。捕捉および処理レシーバは、これを、次のことによって扱うことができる。
【0098】
a)各周波数を別個に平行して捕捉する(複数の平行信号経路により複数のRFフロント・エンドまたは単一のRFフロント・エンドを使用して)
b)各周波数を別個に連続して捕捉する(選ばれた複数の周波数間で移動するために、例えば、異なる帯域幅およびフィルタ設定により、切り替え/プログラムすることのできる単一フロント・エンドのみを必要として)
c)送信される場合よりも遙かに少量でオフセットされた、同じIF信号内で異なる周波数により単一出力を生成するために全ての周波数をミックス・ダウンする1つのフロント・エンドを使用することにより、全ての周波数を共に捕捉する。
【0099】
GLONASSは、異なる人工衛星に対してわずかに異なる送信周波数を使用する。GLONASS用の格納および処理レシーバは、例えば、より高いサンプリング・レートで帯域幅全体を捕捉することにより実施することができる。
【0100】
トリガーに関連するパラメータを格納する一例を、使用されるゴルフクラブの形式で先に示した。より一般的には、本発明の一態様は、撮影した画像がそのような追加データを使用して処理され分類されることが可能となるように、撮影した画像と共に追加データを提供することに関する。この追加データはトリガーに直接的に関係することができるが(使用されるゴルフクラブの例にあるように、ゴルフのスイングがトリガーを形成するため)、トリガーに直接的に関係しない、時間と関連した他のパラメータに関係することもできる。この一例は温度である。これにより、例えば画像を気象条件によって分類する方法のように、画像を温度により分類することが可能になる。
【0101】
気象条件により画像を分類する別法として、大気圧を(気圧計から)画像と共に記録することもできる。
【0102】
時刻、レンズ設定、カメラのフラッシュ設定、カメラの機種、画像サイズなど、カメラの動作条件に関するパラメータを、撮影された画像と共に記録することが知られている。本発明のこの態様は、カメラ付近の外部パラメータに関する追加情報を記録するが、これらはカメラの設定からは導出されず、したがってカメラの構成からは独立したものである。
【0103】
温度の例の場合、専用の温度センサーは必要とされない場合があるが、その場合、代わりに温度は、例えば電圧制御発振器など、カメラ内の温度依存回路コンポーネントの動作条件から導出することができる。画像を表示しまたは分類するために、追加の情報を使用することができる。
【0104】
当業者には、様々な他の変形形態が明らかになろう。
【技術分野】
【0001】
本発明は、全地球測位システム(GPS)などのような衛星測位システムで信号を処理する方法に関する。詳細には、位置を決定するためにオフラインで処理するよう衛星放送が記録されるシステムに関する。
【背景技術】
【0002】
全地球測位システムは、6つの異なる軌道面にのった最高32機までの軌道衛星(宇宙飛行体「SV」と呼ばれる)のネットワークからなる、人工衛星に基づいたナビゲーション・システムである。システム設計上、24機の人工衛星が必要とされるが、人工衛星の数がさらに増えればサービス区域が向上する。これらの人工衛星は、常に移動し続けており、24時間未満で地球周回軌道を2回転する。
【0003】
人工衛星により送信されるGPS信号は、規則的に連続して反復される擬似乱数コードを使用する、直接シーケンス拡散スペクトルとして一般に知られる形態をとっている。人工衛星は、民間で自由に入手可能な粗い捕捉コード(C/Aコード:Coarse/Acquisitionコード)や普通は軍用とされる限定された精密コード(Pコード:Preciseコード)を含む様々な拡散コードにより複数の信号を放送する。C/Aコードは、チップ・レート1.023MHzで放送され1ミリ秒毎に反復される、1023ビット長の擬似乱数コードである。各人工衛星は、各人工衛星を一意に識別することを可能にする別個のC/Aコードを送信する。
【0004】
データ・メッセージは、各人工衛星によりC/Aコードの出だし部分で変調され、送信側人工衛星の詳細な軌道パラメータ(人工衛星軌道暦(エフェメリス)と称される)、人工衛星のクロックのエラーに関する情報、人工衛星の状況(健全、不健全)、今日の日付、および時刻のような重要情報を含む。信号のこの部分は、GPSレシーバが正確な位置を決定する際に不可欠である。各人工衛星は、それ自体のエフェメリスと詳細なクロック訂正パラメータとを送信するだけであり、したがって、GPSレシーバ単体では、位置計算に使用しようとする各人工衛星のデータ・メッセージの適切な部分を処理する必要がある。
【0005】
データ・メッセージはまた、他の全ての人工衛星に関する、あまり頻繁には更新されず正確さに乏しい情報を含むアルマナックと呼ばれるものも含んでいる。アルマナック・データによってGPSレシーバは各GPS人工衛星がいるべき場所を一日中いつでも推定することができるので、GPSレシーバは、探索すべき人工衛星をより効率的に選ぶことができるようになる。各人工衛星は、システム内の各人工衛星に関する軌道情報を示すアルマナック・データを送信する。
【0006】
従来のGPSレシーバは、送信されたデータ・メッセージを読取り、エフェメリス、アルマナック、および他のデータを連続して使用するために保存する。この情報は、GPSレシーバ内のクロックを設定(または訂正)するために使用することもできる。
【0007】
位置を決定するために、GPSレシーバは、ある人工衛星によって信号が送信された時刻をその信号がGPSレシーバによって受信された時刻と比較する。この時間の差違は、特定の人工衛星がGPSレシーバからどれだけ離れているかをそのGPSレシーバに伝える。複数の人工衛星からの距離測定を組み合わせることにより、位置を三辺測量術により取得することができる。最低3機の人工衛星があれば、GPSレシーバは、緯度経度位置(2次元位置決定)を決定することができる。4機以上の人工衛星があれば、GPSレシーバは、緯度、経度、高度を含む3次元位置を決定することができる。人工衛星から受信された情報は、GPSレシーバ内のクロックを設定(または訂正)するために使用することもできる。
【0008】
人工衛星からの信号の明らかなドプラ偏移を処理することにより、GPSレシーバは、移動速度および移動方向(「対地速度」および「軌道線」とも称される)を正確に提供することができる。
【発明の概要】
【発明が解決しようとする課題】
【0009】
現行のほぼ全てのGPSレシーバは、人工衛星からの信号が受信されるたびにその信号を「リアルタイムに」処理することにより機能し、現時点での装置の位置を報告する。このような「従来の」GPSレシーバは、常に以下のものを含む。
【0010】
− GPS信号を受信するために適切なアンテナ
− 所望の信号が通常は数MHzというサンプル速度で適切なアナログ/デジタル(A/D)コンバータを通過することができるように、所望の信号を増幅し、フィルタリングし、かつ中間周波(IF)にミックス・ダウンするよう設計されたアナログRF回路(GPSフロント・エンドと呼ばれることが多い)
− 信号処理ハードウェアを制御し、所望の位置決定を計算するために必要な「より高度な」処理を実行する何らかの形式のマイクロ・コントローラと通常は組み合わされる、A/Dコンバータにより生成されたIFデータ・サンプルで相関処理を実行するデジタル信号処理ハードウェア。
【0011】
「格納し、後で処理する」(「捕捉し、処理する」としても知られている)というそれほど良く知られていない概念も研究されている。これは、従来のアンテナおよびアナログRF回路によって収集されたIFデータ・サンプルを、後で(数秒後、数分後、数時間後、または場合によっては数日後)処理する前に、また、多くの場合は処理資源がより豊富などこか他の場所で、ある形式のメモリに格納することを必要とする。
【0012】
従来のGPSレシーバに対する捕捉し処理するという方法の主要な利点は、デジタル信号処理を捕捉時に行う必要がなく、グラブを非常に短くする(例えば、100ms)ことができるので、捕捉装置の原価および電力消費が最低に抑えられることである。関連する人工衛星データ(エフェメリスなど)を他の方法により取得することができる場合、後続の信号処理が行われると仮定すると、この方法は、多くの場合従来型装置を起動するために許容範囲を超えて長時間掛かる捕捉装置で、SVからの(非常に遅い)データ・メッセージを復号する必要性の除去も行う。
【課題を解決するための手段】
【0013】
本発明の一態様によれば、人工衛星測位システムからの信号を、第1のトリガー信号のタイミングのみならず第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して処理する方法が提供される。
【0014】
捕捉し処理する人工衛星測位は、広範囲に亘る応用例において有用である。記録されたデータ・サンプルを処理し使用する最良の方法は、応用例により異なる。したがって、特定のグラブ(ブロック)の目的が分かっている場合、この捕捉し処理する人工衛星測位はデータを処理する最良の方法に関してヒントを提供することができる。1ブロックのデータ・サンプルを捕捉するためのトリガーまたは要求に関する情報を使用することにより、データ・サンプルの捕捉および/または処理を、問題の特定応用例に関して最適化することができる。
【0015】
本発明の一実施態様では、処理することが、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、1つまたは複数のパラメータによる処理方法を使用して処理することを含む。
【0016】
第1のトリガー信号の1つまたは複数の記録されたパラメータは、トリガーの発信元装置を識別する情報およびトリガーの発信元装置のパラメータの少なくとも1つを含むことができる。
【0017】
トリガー信号が何らかの関連付けられたハードウェアの部分からの要求である場合、その装置とその装置の目的に関する知識は、データ・サンプルを処理する最も最適な方法を推定するために有用な前後関係を提供する。
【0018】
発信元装置はカメラであってよく、また発信元装置のパラメータは、フラッシュをたいたか否かを識別する情報、開口量、焦点距離値、ズーム値、光レベル値、露出時間、被写体距離、配向を識別する情報、およびシーンタイプを識別する情報の少なくとも1つを含むことができる。
【0019】
発信元装置がカメラであることは、所望の応用例がこの画像にジオタグを付けることを示す場合がある。この場合、目標は、通常、格納されたデータ・サンプルのブロックを使用して、所与の写真が撮影された場所に対応する位置決定を計算することである。写真が撮影された時のカメラ・パラメータの知識は、その写真が撮られた状況に関する情報を推定するために使用することができ、その推定された情報は、続いて、位置を推定するために特定の方法を指定することができる。
【0020】
発信元装置は、モーションセンサー、加速度センサー、および配向センサーの少なくとも1つを含むことができる。
【0021】
第1のトリガー信号の1つまたは複数のパラメータは、トリガーの日付/時刻、距離測定、コンパス方位、加速度測定、高度測定、歩数、および車輪回転数の少なくとも1つを含むことができる。
【0022】
1ブロックのデータ・サンプルを記録することに関連する物理的状況に関して感知された情報は、導出された位置情報の所期の応用例またはそれを計算する最適な方法に関する有用なインジケータを提供することができる。
【0023】
この方法は、追加の情報を導出するために、記録されたブロックを、第2のトリガー信号の1つまたは複数の記録されたパラメータを使用して処理することをさらに含むことができる。
【0024】
ブロックの捕捉に関連したトリガーに関する情報は適切な処理方法に関する有用なインジケータを提供することができるので、他のトリガーから収集される情報(例えば、問題のブロックの前後近くのトリガー)により、その前後関係の知識をよりさらに増加させることができる。
【0025】
有利には、記録されたブロックの処理は、第1のトリガー信号の記録されたパラメータによりソフトウェア・アプリケーションを起動することを含むことができる。
【0026】
最も関連するプログラムを、グラブの意味論上の重要性に従って選ぶことができる。これを選ぶことによって、ユーザからの追加入力を必要とせずに効率的な処理が可能になり、全ての情報を完全に活用することが保証される。
【0027】
有利には、記録されたブロックの処理は、位置情報の導出を簡素化するために、第1のトリガー信号の記録されたパラメータを使用することを含むことができる。
【0028】
トリガー信号の詳細な知識に基づいて様々な推定が可能になる。例えば、時間または位置の大まかな推定を行うことができる場合、人工衛星信号サンプルの処理は事実上さらに効率的に行うことができる。
【0029】
本発明の別の実施態様では、処理することは、トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプル、トリガー信号の1つまたは複数のパラメータにより記録することの少なくとも1つのパラメータを記録することを含むことができる。
【0030】
トリガー信号の詳細な知識を即座に得ることで、捕捉パラメータをその状況に対して最適化することが可能になる場合がある。例えば、応用例によって、より高度なエラー強さを要求する場合のあるものと、捕捉状況が有利になる可能性のあることを示す場合のあるものとがある。
【0031】
この方法は、少なくとも位置情報を導出するために、記録された数ブロックのデータ・サンプルをプロセッサに提供することをさらに含むことができる。
【0032】
記録することの少なくとも1つの第1のパラメータは、記録されるデータ・サンプルの数であってよい。
【0033】
この方法で、グラブの長さを、例えばトリガーのタイプにより予期される環境状態について最適化することができる。グラブの長さを最小に保つことにより、レシーバの電力消費とストレージ・オーバーヘッドの両方が低減される。同時に、ユーザは、捕捉が完了するまで最小の時間だけ待てばよい。サンプルから位置決定が計算される場合、グラブを短くすることによって、後の処理負荷を低減することもできる。
【0034】
トリガー信号の少なくとも1つの第2のパラメータは、トリガーの発信元装置を識別する情報およびトリガーの発信元装置のパラメータの少なくとも1つを含むことができる。
【0035】
トリガー信号が何らかの関連付けられたハードウェアの部分からの要求である場合、その装置とその装置の目的に関する知識は、データ・サンプルを記録する最も最適な方法を推定するために有用な前後関係を提供する。
【0036】
発信元装置はカメラであってよく、また発信元装置のパラメータは、フラッシュをたいたか否かを識別する情報、開口量、焦点距離値、ズーム値、光レベル値、露出時間、被写体距離、配向を識別する情報、およびシーンタイプを識別する情報の少なくとも1つを含むことができる。
【0037】
写真が撮影された時のカメラ・パラメータの知識は、その写真が撮られた状況に関する情報を推定するために使用することができ、その推定された情報は、続いて、最適な記録パラメータの特定セットを指定することができる。
【0038】
発信元装置は、モーションセンサー、加速度センサー、および配向センサーの少なくとも1つを含むことができる。
【0039】
トリガー信号の少なくとも1つの第2のパラメータは、トリガーの日付/時刻、距離測定、加速度測定、歩数、および車輪回転数の少なくとも1つを含むことができる。
【0040】
1ブロックのデータ・サンプルを記録することに関連する物理的状況に関して感知された情報は、その最適な実行方法に関する有用な指示を提供することができる。
【0041】
この方法は、トリガー信号のパラメータを記録すること、および記録されたパラメータを処理システムに提供することをさらに含むことができる。
【0042】
したがって、トリガーのパラメータは、ブロックの最良の捕捉方法を決定する際にオンラインで、またブロックの最良の処理方法を決定する際にオフラインで使用することができる。
【0043】
本発明の別の態様によれば、衛星測位システムからの信号を処理するための機器であって、第1のトリガー信号のタイミングのみならず第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して信号を処理するようになされた処理手段を含む機器が提供される。
【0044】
一実施態様では、処理手段は、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、1つまたは複数のパラメータによる処理方法を使用して処理するようになされたプロセッサであってよい。
【0045】
別の実施態様では、処理手段は、トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプル、トリガー信号の1つまたは複数のパラメータにより記録することの少なくとも1つのパラメータを記録するようになされた記録手段である。
【0046】
したがって、本発明の方法および機器は、データ捕捉の実行方法および/または捕捉されたデータの処理方法を制御するトリガー情報を使用することができる。
【0047】
本発明を、添付の図面を参照して例示により説明する。
【図面の簡単な説明】
【0048】
【図1】本発明の一実施形態によるGPSレシーバの図である。
【図2】一実施形態によるトリガーされた捕捉および処理データを記録する方法を示す図である。
【図3】一実施形態によるトリガーされた捕捉および処理データを処理する方法を示す図である。
【発明を実施するための形態】
【0049】
本発明は、GPSデータのような格納された衛星測位システム・データを処理する複数の方法を提供する。これらの方法は、レシーバからGPS信号処理機能を除去し、この機能を遠隔で実施することが望まれる多くの捕捉および処理応用例で使用することができる。
【0050】
典型的な応用例では、IFデータ・サンプルの短いブロック(以下の説明では「グラブ」と称する)をメモリに格納する小型捕捉装置は、1つまたは複数の従来型GPSレシーバがそれら自体で受信したGPSデータ・メッセージの主要部分を中央コンピュータに中継する1つまたは複数の従来型GPSレシーバに接続されることにより、そのIFデータ・グラブを引き続き共有の中央コンピュータにアップロードすることができるが、ここで、この共有の中央コンピュータは、必須の信号処理(訂正など)を実行するだけでなく最近の衛星情報(エフェメリスなど)のデータベースにアクセスもするものである。
【0051】
特に、本発明は、レシーバが何らかの刺激に応じて捕捉をトリガーするためのトリガー機構を含むか、または通信インターフェースを介して他の装置から類似のトリガー信号を受信するようになされた捕捉および処理応用例に対応する。そのようなレシーバは、トリガーによってIFデータ・サンプルを捕捉するよう要求された際にそれを実行するだけなので、不要なグラブを捕捉し格納する時間、エネルギー、および記憶空間を浪費することがない。したがって、連続して周期的グラブを捕捉する装置と比較して、電力消費量および記憶資源の使用量は最適化されている。捕捉および処理の方法は、複素信号処理ハードウェアに電力供給する必要がないという意味で既にエネルギー効率が良いが、トリガーされたグラブがあれば、電池の寿命をさらに延長することができる。さらに、「ブラインド」(トリガーされない)定期的グラブという他の方法と比較して、トリガーは、グラブがそれをトリガーするイベントの場所と正確に一致することを保証する。
【0052】
しかし、トリガーが使用できることは、グラブ数を低減するために有用なだけではない。トリガーに(明示的に、または暗黙で)含まれる情報を、トリガーされたグラブの記録および/または後での処理を案内するために使用することができる。
【0053】
レシーバで各グラブを記録することを最適化するためにトリガーのパラメータが使用される、本発明の第1の態様を次に説明する。
【0054】
図1は、本発明による方法を実施するようになされた、捕捉および処理GPSレシーバ5のシステム図である。GPS衛星からの信号は、アンテナ10により受信され、次いで従来型アナログ処理に掛けられるが、この従来型アナログ処理は、通常は、参照オシレータ(発振器)14(通常は、温度補償水晶)により駆動されるユニット12における増幅、フィルタリング、およびダウン・ミキシングの組み合わせと、それに続くユニット16におけるA/D変換を含んでいる。これは、RFフロント・エンドを形成する従来型ラジオ・レシーバ・エレクトロニクスである。
【0055】
関連付けられたファームウェアと共に離散論理またはマイクロ・プロセッサとして実施されるコントローラ18は、RFフロント・エンドにより生成され、次いでフラッシュRAM、ハードディスクなどのようなストレージ装置20に記憶される、サンプリングされたIFデータの捕捉を制御する。この実行方法は、ユーザの設定(GUI22により入力される)とトリガー22により影響される。トリガー24は、図示するように内部トリガーであっても、外部装置(図示せず)から受信した信号への応答であってもよい。
【0056】
好適には、コントローラは、RFフロント・エンド、A/Dコンバータ、およびストレージ装置を低電力待機状態に保ち、トリガーからの指示でデジタル化されたサンプルをいつでも捕捉できる状態にしておく。
【0057】
トリガーされると、装置はRFフロント・エンドからIFデータの短いブロックを記録する。デフォルトのグラブは、例えば100msの長さであってよい。しかし、特定のグラブに関するトリガーに含まれる情報は、コントローラ18に、より長いグラブまたはより短いグラブを捕捉させることができる。使用される正確な値は、ユーザによりGUI22を介してさらに調節することができる。別の応用例では、異なる長さのグラブが適切になろう。したがって、グラブをトリガーするためだけでなく、グラブの長さを無条件で変調するためにもトリガーを使用することにより、レシーバは、変化する条件および要件に適応することができる。通常、各グラブは、サブフレームの持続期間6秒、好適には500msより短くなる。
【0058】
コントローラにより実施される論理を、図2を参照しながら説明する。「システムを初期化する」ステップ30は、デフォルトのグラブのあるべき長さを選択することを含む。次いでコントローラは、トリガー信号を短期間の間待ち受けるループに入る(ステップ32)。トリガーが受信されない場合、コントローラは、ユーザがデータの記録を停止するよう命令したか否かを確認する。またはトリガーが受信された場合は、ステップ36で、1つのグラブのGPS IFデータが、そのトリガーに従い選ばれたパラメータと共に格納される。次いでコントローラは、トリガーを確認するループに戻り、命令を停止する。記録が一度終了すると、ステップ38はデータをダウンロードできるかを監視し、ステップ40は記録されたグラブのアップロードを、後続処理のために、あるPCに関係付ける。ステップ34と36でのグラブのトリガーは同期的であってよいが、好適には、グラブが受信直後に任意の追加の遅滞なく捕捉されるように非同期である。
【0059】
本方法は、様々な応用例で有用である場合がある。デジタル写真の応用例では、例えば、写真の撮影またはムービー・クリップの記録が、捕捉および処理GPSレシーバがIFグラブを捕捉するようトリガーすることができる。レシーバは、カメラに内蔵されていても、または外部付属品として提供されてもよい。後者の場合、レシーバは、トリガー信号をカメラからレシーバに渡すことを可能にする通信リンクによりカメラに接続される。標準カメラのホットシュー(外部フラッシュ・ユニットをカメラに接続し、同期させるために使用されることの多い種類)を、この目的で使用することができる。一般的にはIFグラブのトリガーと捕捉の間の厳密な同期が望ましいが、場合によっては、写真を撮影するタスクとグラブを捕捉するタスクをわずかにインターリーブまたはオフセットすることが有利な場合があることに留意されたい。例えば、フラッシュの放電により生じたインパルス雑音が、受信したIFデータ・サンプルにエラーを生じる可能性があるので、人工衛星信号の干渉を最低限に抑えるには、グラブは、フラッシュと同時ではなく、フラッシュをたく前後に記録することができる。
【0060】
GPSレシーバは、トリガーする際に、カメラにより提供される情報に従いデータ・サンプルを捕捉する。例えば、フラッシュがたかれ、被写体との距離(オートフォーカス・システムにより測定された)が短いことをカメラがレシーバに伝えた場合、レシーバは、その写真は屋内で撮影されている可能性が高いと推定することができる。一般的に、建材は人工衛星からの電波信号を減衰させるので、信頼できる人工衛星測位を屋内で達成することは、さらに困難である。この場合、レシーバは、劣ると予想される信号状態のエラー強さを高めるために、トリガーされたグラブの長さを延長することができる。
【0061】
従来型の「リアルタイムな」GPSと比較して、捕捉および処理のパラダイムの不利な点の1つは、十分な数の人工衛星が位置決定の導出を可能にするために、信号雑音比(SNR)が十分に高いか否かが、グラブを捕捉する時点では認識されていないことである。全ての処理が「オンラインで」実行されるので、従来型GPSレシーバは、人工衛星データ信号を獲得する際に類似の問題を経験する場合があるが、それが発生した時点で少なくとも信号損失には気付く。低いSNRの作用を緩和する1つの方法は、受信した信号のより長い持続時間を処理することである。残念ながら捕捉および処理レシーバの場合は、格納されたサンプルが処理され、その時点までは追加サンプルを捕捉することによって問題を改善することは不可能なので、信号損失は後にならないと明らかにならない。その結果、一方では必要なエラー強さを達成するために十分長いグラブを捕捉すること、もう一方では捕捉における時間、電力、およびストレージ・オーバーヘッドを最低限に抑えることの間で固有のトレード・オフが生じる。トリガーのパラメータ(本実施例ではフラッシュと焦点距離)は、したがって、所与の一組の状況にトレード・オフを適応させる貴重な情報源である。
【0062】
他のカメラのパラメータを推定に使用することができる。写真が屋内で撮影されているか屋外で撮影されているかを予測するために、開口、露出時間、照度、または輝度の知識を等しく使用することができる。さらに、多くの現代のカメラは、カメラ捕捉パラメータを最適化するために使用される、「屋内」、「屋外」、「景色」、または「ポートレート」のようなユーザが選択可能なモードを内蔵している。これらのモードは、GPSグラブをトリガーする際に、前後関係の情報のさらに直接的な源として使用することができる。
【0063】
グラブの長さに影響を与えることに加え、カメラのパラメータは、他の方法で捕捉に影響を与えるために使用することができる。例えば、カメラに内蔵されたGPSレシーバは、信頼性を高めるために多様なアンテナを組込むことができる。このようなシナリオでは、その配向で最強の信号を受信できる可能性の高いアンテナの知識に基づいて、それらのアンテナの1つを選択するために、カメラによって提供される配向情報を使用することができる。
【0064】
他の応用例では、捕捉の様々なパラメータを変化させることが適切である場合がある。例えば、アナログ・デジタル変換16のサンプリング・レートまたはビット解像度を、変更可能なエラー強さ、電力消費量、正確さ、および耐電波障害性を提供することができる。当業者には容易に明らかになろうが、サンプリング・レートおよび解像度のパラメータとグラブの長さのパラメータとの間には、固有の設計上の妥協がある。
【0065】
同様に、他の応用例では、異なるインジケータがこれに当てはまる。例えば、ゴルフのジオタグの応用例では、スイング毎にグラブをトリガーすることができる(ゴルフクラブ内のセンサーによって自動的に検出される可能性のある)。ゴルフのストロークは高い確率で屋外での活動であることを認識すれば、グラブの長さもしたがって低減することができる。
【0066】
一方、自転車に乗っている場合は、速度の推定によって推測をすることができる。グラブの捕捉は、固定された車輪の回転数によってトリガーすることができ(グラブ捕捉速度は移動速度に自動的に適応されるので、本質的に有用であることに留意されたい)、またトリガーとトリガーの間の時間を測定することによって、平均速度の大まかな推定を導出することができる。より速い速度は、より良好な人工衛星の受信を有し、より短いグラブを指令するオープン・エリアを暗示する場合があり、遅い速度は、停滞、劣った人工衛星の受信、およびそれに対応してより長いグラブを暗示する場合がある(これは、密集した都会の環境内のみならず、例えば自然の障害物のある密林内で、等しくオフロードで適用することができる)。トリガーすることが、移動した固定距離にリンクされていないとしても、それでもなお、速度は、記録することのパラメータを制御するために使用することができることに留意されたい。例えば、時刻を合わせた捕捉の周期の増加は、速度が速くなったことを示すトリガーに応じて増加する場合がある。
【0067】
好適には、トリガー信号のパラメータは、各IFグラブと共に格納することができる。多くの応用例では、追加情報を記録することは本質的に有用であろう。例えば上記で強調したゴルフのシナリオにグラブを捕捉する際、特定のストロークに使用したクラブを記録することはゴルファーにとって関心のあることであろう。さらに、そのような記録されたパラメータは、サンプルを処理する後処理方法を構成するために後で使用することができる。格納されたパラメータは、捕捉処理に影響を与えるために使用されたパラメータと同じであっても、異なっていてもよい。
【0068】
レシーバからのアップロードに引き続き、各グラブの処理を最適化するためにトリガーの記録されたパラメータが使用される本発明の第2の態様を次に説明する。
【0069】
図3は、本発明の一実施形態による処理方法を示す。この方法は、例えば記録されたIFグラブを処理するパーソナルコンピュータによって実施することができる。
【0070】
ステップ50で、記録されたグラブがレシーバ5からアップロードされ、ステップ52で、詳細なパラメータ情報を含めて記録されたトリガーがアップロードされる。各アップロード動作は、有線、無線、または赤外線リンクを含めていかなる使用可能な通信リンクをも利用することができる。通常、リンクはステップ50と52の両方に共通している。
【0071】
ステップ54で、コンピュータは、インターネットを介して入手可能なエフェメリスのようにGPS人工衛星に関するエフェメリスデータをデータベースから取得する。別個の源からの完全なエフェメリスデータ(記録されたIFグラブ以外の)の入手可能性は、多数の利点をもたらすものである。そのデータは、位置推定を最低の長さのグラブから導出することを可能にするか、またはコンピュータで最小の処理作業で同様のことを行うことを可能にすることができる(以下で、より詳細に説明する)。
【0072】
次いでコンピュータは、ステップ56でグラブを選択し、ステップ58では、起動すべき最も最適なソフトウェア・アプリケーション、および/またはアップロードされたトリガーのパラメータに基づいて位置決定を導出するために最も最適なコンピュータ戦略を識別して、アップロードされたグラブおよび関連付けられたトリガーを反復する。
【0073】
グラブ毎に、ステップ60の処理は位置推定を決定する。この処理は、当業者には良く知られているであろう。この処理は、本質的に、可能な限り多くのSVの信号に関するIFサンプルの検索と、その後に続いてそれらの信号の飛行時間の推定および位置を導出するための三辺測量術を必要とする。この段階で、上記検索を導くために、ダウンロードされたエフェメリスデータを使用することができる。例えば、グラブの捕捉時間と各SVの経時的位置とが分かっているので、一定のSVだけが所与の位置のレシーバに見えることになる。したがって、複数のSVの1つに対応する信号が一度見つかると、同時には見えない多数の他のSVを検索から除去することができる。
【0074】
連続するグラブは連続して処理することができる。この処理により、連続するグラブが近接した位置と時間を表すことに基づいて、検索をさらに制限することができる。例えば、1つのグラブで見つかったSV信号は、その順序において先行するグラブと後続のグラブに存在する可能性が非常に高く、検索はそのような複数のSVを優先することができる。
【0075】
検索戦略の改善は、格納されたトリガーのパラメータが処理を強化することのできる1つの方法である。上記のデジタル・カメラの応用例に戻ると、写真が所与の捕捉時間(カメラの内部クロックにより決定される)で「ナイト」モードで撮影された場合がある。カメラのユーザの国の標準時間帯を仮定することによって、写真撮影の場所(また、したがって関連付けられたIFグラブ)は、その捕捉時間に夜間になる地球上の部分に即座に限定することができる。これは次いで、そのグラブに存在する可能性のある人工衛星データ信号を導出するためにエフェメリスデータと共に使用することができる。
【0076】
場所の絶対的な推定を推測することのみならず、関連する推測を行うためにトリガー情報を使用することもできる。例えば、トリガーは、固定数の自転車の車輪の回転などのような距離測定に関連付けることができる。このような距離でトリガーされたグラブは次いで、前の(後の)グラブからの所与の固定された距離以下であると仮定することができる。この知識は、人工衛星がそのグラブを獲得することを失敗した場合に、より長い順序において1つのグラブのための位置決定を導出するために、極端な場合に使用することができる。可能な場所の軌跡は、固定された半径の2つの円の交点によって制限され、失敗したグラブの直前および直後にトリガーされるグラブを中心として描かれる。車輪の回転によって直接的にグラブの捕捉がトリガーされないとしても、それでもなおグラブと共に回転数が記録されれば、同じ結果を達成することができることに留意されたい。
【0077】
上記の自転車の車輪センサーの場合は、距離情報を位置センサーから導出することができ、また、場合によっては加速度センサーから導出することができる。例えばランニングシューズの場合、事前定義した歩数の間隔後にIFグラブをトリガーするために加速度計を使用することができる。経時的に、平均的な歩幅を大まかに一定であると仮定することができるので、位置を推定するために連続したグラブを処理する場合には、類似の最大距離の半径を設定するためにその歩幅の数を使用することができる。
【0078】
他のシナリオには、動きのある場合にはいつでもグラブをトリガーすることが適切である場合がある。反対に、トリガーされたグラブ間に動きが検出されない場合、その処理は、その連続したサンプルが同じ位置に関連するという高い確実性を有することができる。
【0079】
距離または速度の正確な測定値が入手不可能な場合であっても、サンプルの後続の処理においては、グラブが所与の活動の分脈でトリガーされるという知識だけが有用な場合がある。例えば、自転車をこいでいる状況またはランニングしている状況では、特異の位置の大まかな推定を導出するために、グラブ間の時間を活動の力学に関する一般的な仮定と共に使用することができる。
【0080】
トリガーのパラメータは、推定を行うために外在的情報と組み合わせることもできる。例えば、ゴルフのジオタグの応用例では、ストローク毎にグラブをトリガーすることができる(これは、ゴルフクラブ内のセンサーによって自動的に検出することができる)。サンプルが後で処理される場合、ユーザが常に訪れるゴルフコースの外在的知識を、位置推定処理の開始点として使用することができる。初期の曖昧性を低減することによって、ここでもまた、正確な位置推定を、迅速に最短の長さのグラブによって計算することができる。
【0081】
本発明による方法は、位置推定の導出で援助するのみならず、導出されたGPSの位置を同化させるために適切なソフトウェア・アプリケーションの選択で援助することができる。したがって、カメラからグラブをトリガーした場合、場所名を写真に割り当てるために地理情報システム(GIS)データベースを潜在的に参照して、写真ジオタグのアプリケーションを起動することができる。同様に、ゴルフスイングによりトリガーされるグラブの場合、スペシャリストGISデータベースからダウンロードして、ラウンド全体でのプレーを分析し、使用したゴルフクラブ(および関連する飛距離)を記録し、そのコースのパー情報も含めて自動的にスコアを計算するプログラムを起動することができる。
【0082】
複数のソフトウェア・プログラムから選択する機能は、1つの捕捉および処理GPSレシーバを複数の多様なセンサーまたは装置で共用する(すなわち、トリガーされる場合がある)場合には特に有益である。したがって、ゴルフコースで撮影された写真は写真管理ソフトウェアによって自動処理することができ、ゴルフストローク・データはゴルフ・ソフトウェアによって扱うことができる。
【0083】
様々なソフトウェアが適切な場合があるが、使用可能な情報を最大限活用するために、多様なトリガーに関連付けられた近接したグラブを相互参照することができる。例えば、ゴルフコースで複数のゴルフストローク間で頻々と写真が撮影されるだけでなく(上記のように位置ブートストラップを可能にして)、写真管理ソフトウェアによってそれらの写真は「ゴルフ」という項目にセマンティックに分類される。これらはどちらも、状況に基づいて、捕捉したIFデータの処理をさらに強化するために第2の、追加のトリガーをどのように使用することができるかを示す例である。第1のトリガー(カメラ・トリガー)は写真自体に関連付けられており、追加のトリガーはゴルフストロークに関連付けられている。これらのトリガーは、時間的な近似性に基づいて相互参照することができるか、またはリンクされることができる。位置を導出するための写真に関連付けられたデータ・サンプルの処理は、ゴルフコースが撮影地である可能性が高いという知識により、ブートストラップすることができる。別の例では、前例と同様に、写真管理ソフトウェア・アプリケーションを起動するために第1のトリガー(カメラ・トリガー)が使用される。次いで写真の状況を推測するために第2の(ゴルフ)トリガーが使用され、その結果、同ソフトウェアにより写真は「ゴルフの写真」と分類され類別される。
【0084】
上述のように、関連付けられたトリガーの知識に基づくIFグラブの改善された処理は、可能で有効なGPS位置推定の範囲を限定するために、曖昧性を連続的に除去することを含むことが多い。徹底した説明のために、曖昧性を除去するための適切な技術をより詳細に次に説明する。
【0085】
特定の人工衛星からの信号を識別するには、その人工衛星が使用していることが分かっているC/Aコードのレプリカを生成し、そのレプリカが入来信号と同期するようにそのレプリカを整列させることが必要となるが、ここで、入来信号は、大部分は人工衛星からレシーバまで信号が移動する飛行時間のために、不明の期間(通常は約0.07秒)だけ遅延する。一般に、レプリカを入来信号と同期させるために必須の整列を正確に予測することは不可能なので、次に複数の整列を試行し最適な対を選択する、ある形式の検索が要求される。複数の候補の整列を評価するこの処理は、特定SVからのC/Aコードを有する成分を受信信号が含むか否かを決定するために、次に人工衛星毎に受信信号と既知のC/Aコードの間の相関機能として共通して実施される。相関機能は、複数の関連するタイミングについて計算される必要があり、相関のピークが見つかると、それは特定のタイミングおよび特定のSVに対応する。見つかったタイミングは、次に、そのSVから特定の距離に対応する。
【0086】
決定されたコードの位相、すなわち相関機能のピークのタイミングは、距離計算で使用するための正確なタイミング情報を示す。しかし、コードはミリ秒毎に反復されるので、大まかなタイミングを決定する必要もある。通常、従来型のリアルタイム・レシーバでは、サブフレーム・プリアンブルまたはサブフレーム・ハンドオーバー・ワードなど、50bpsデータ・メッセージの個別ビットおよびその特定部分のようなより大まかなタイミング推定(すなわち、GPS時間を導出することを可能にする)には、頻繁には反復されないデータ成分が使用される。
【0087】
相関機能が実行される統合期間によって、特定コードで符号化された信号をいかに容易に識別できるかが決定されるが、一般には、統合期間が長いほど、所与の信号強度に関して正確なコード位相がより確実に報告されるべきである。検出されるべき信号が弱いほど、同程度の信頼性を達成するには、より長い統合期間が必要となる。
【0088】
短いグラブは、コード位相測定を取得することを可能にする。しかし、コード位相測定だけでは、遅延が1ミリ秒のどの位わずかであるかは示すがミリ秒の整数は示さないので、曖昧である(先に指摘した通り)。したがって、例えば100msのIFデータ・コードの単一グラブは、明瞭な位置を計算するための十分な情報をそれ自体には含まない。
【0089】
より効率的により良い結果を提供するために、おおよその位置(または時間)を使用することができる。例えば、他の情報を付けずに単一のグラブが与えられた場合、全ての可能なコード位相および搬送周波数で全ての32機のSVを検索することは必須である可能性がある。検索が必要とされる搬送波周波数の範囲の大きさは、GPSフロント・エンドの発振器の品質(1ppmのエラーを有する発振器はL1信号のIFで1.5kHzのエラーをもたらす)と信号に対する可能なドップラー・シフト(地球の表面から観測されるSVは、通常はプラスマイナス4kHzの範囲のドップラー・シフトを有しており、レシーバの動きはこれを増加させることができる)により決まる。
【0090】
位置推定は、位置決定に要求される処理を低減することができる。具体的には、上述したコード位相測定のタイミングの曖昧性を克服するために、位置のおおよその知識を使用することができる。電波信号は1msに約300km移動するので、150km半径内の位置を知っていれば曖昧性は全くないことになる。位置推定がこの150km以内の精度でないとしても、視界に入るSVを決定することがまだ可能な信号の処理を手伝うことはできる。つまり、相関計算を減らすことができるということである。
【0091】
位置推定はSV信号の明白なドップラー・シフトから導出することができることが知られている。この推定は正確ではないが、飛行時間推定に関連付けられた曖昧性の問題は生じない。したがって、擬似距離測定値の曖昧性を除去するため、また、次いで正確な位置を導出するために、ドップラー・シフトを使用したおおよその位置決定を使用することができる。
【0092】
同様に、タイミングの曖昧性を直接的に削除するために時間推定を使用することができる。
【0093】
同じ装置が類似の時間に記録した一群のグラブが処理される場合、1つのグラブであるSVが検出されると、他のグラブでも同じSVが検出可能となる可能性が高まる。さらに、あるSVが存在することが一度分かると、それと地球の反対側にあることが分かっている全てのSVを除外することができる。さらに、所与のSVの搬送周波数は非常にゆっくり変化するので、行うべき周波数検索サイズを潜在的に制約して、時間的に近似したグラブ内の搬送周波数を予測するために1つのグラブ内の搬送周波数の知識を使用することができる。最後に、複数グラブ間の時間差をどれだけ正確に決定することができるかにより、データ・メッセージ内の位置を予測することができ、1つのグラブからのビット・エッジの位置またはコード位相さえも検索をさらに容易にかつ/またはさらに信頼性高くする全ての情報。
【0094】
上記で説明した通り、位置/速度決定を確立するには、エフェメリスデータによって伝達される、SVの正確な軌道パラメータとそれらSV搭載のクロックのエラーを取得することが必要である。これらは、通常のデータ・メッセージの一部としてSVにより放送され、30秒毎に反復される。そのようなデータを多数の短いIFグラブから抽出することは理論的には可能であるが、実際には、1つまたは複数の参照局にそのデータを収集させ、グラブを処理することを望むいかなるPCからでもアクセスできるデータベースに取り込ませる方が遙かに効果的である。
【0095】
本発明は、トリガーのパラメータからグラブを捕捉し処理するために、それぞれのパラメータを推定する機能にも依存している。これらは、(上記の例に示すように)規則に基づくか、またはさらに高度な統計的推定方法に基づいてよい。当業者には、適切な推定方法は容易に明らかになろう。
【0096】
以上、本発明を、(単一周波数の)GPSに関連して説明したが、他のGNSSシステム(GLONASS、Galileoなど)も同様である。確かに、この技術はまた複数の周波数システムに適用することができる。
【0097】
GPSは幾つかの異なる周波数で送信する。現在、民間ユーザは単一周波数にしか関心はないが、公に使用可能な他の複数の周波数の計画がかなり進められており、例えばGalileoによってカバーされることになろう。捕捉および処理レシーバは、これを、次のことによって扱うことができる。
【0098】
a)各周波数を別個に平行して捕捉する(複数の平行信号経路により複数のRFフロント・エンドまたは単一のRFフロント・エンドを使用して)
b)各周波数を別個に連続して捕捉する(選ばれた複数の周波数間で移動するために、例えば、異なる帯域幅およびフィルタ設定により、切り替え/プログラムすることのできる単一フロント・エンドのみを必要として)
c)送信される場合よりも遙かに少量でオフセットされた、同じIF信号内で異なる周波数により単一出力を生成するために全ての周波数をミックス・ダウンする1つのフロント・エンドを使用することにより、全ての周波数を共に捕捉する。
【0099】
GLONASSは、異なる人工衛星に対してわずかに異なる送信周波数を使用する。GLONASS用の格納および処理レシーバは、例えば、より高いサンプリング・レートで帯域幅全体を捕捉することにより実施することができる。
【0100】
トリガーに関連するパラメータを格納する一例を、使用されるゴルフクラブの形式で先に示した。より一般的には、本発明の一態様は、撮影した画像がそのような追加データを使用して処理され分類されることが可能となるように、撮影した画像と共に追加データを提供することに関する。この追加データはトリガーに直接的に関係することができるが(使用されるゴルフクラブの例にあるように、ゴルフのスイングがトリガーを形成するため)、トリガーに直接的に関係しない、時間と関連した他のパラメータに関係することもできる。この一例は温度である。これにより、例えば画像を気象条件によって分類する方法のように、画像を温度により分類することが可能になる。
【0101】
気象条件により画像を分類する別法として、大気圧を(気圧計から)画像と共に記録することもできる。
【0102】
時刻、レンズ設定、カメラのフラッシュ設定、カメラの機種、画像サイズなど、カメラの動作条件に関するパラメータを、撮影された画像と共に記録することが知られている。本発明のこの態様は、カメラ付近の外部パラメータに関する追加情報を記録するが、これらはカメラの設定からは導出されず、したがってカメラの構成からは独立したものである。
【0103】
温度の例の場合、専用の温度センサーは必要とされない場合があるが、その場合、代わりに温度は、例えば電圧制御発振器など、カメラ内の温度依存回路コンポーネントの動作条件から導出することができる。画像を表示しまたは分類するために、追加の情報を使用することができる。
【0104】
当業者には、様々な他の変形形態が明らかになろう。
【特許請求の範囲】
【請求項1】
衛星測位システムからの信号を、第1のトリガー信号のタイミングおよび前記第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して処理するステップを含む方法。
【請求項2】
前記処理するステップは、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、前記1つまたは複数のパラメータによる処理方法を使用して処理する請求項1に記載の方法。
【請求項3】
前記ブロックを処理するステップの前に、
前記ブロックを、前記ブロックが記録されたポータブル機器から受け取るステップと、
前記第1のトリガー信号の前記1つまたは複数のパラメータを受け取るステップと
を含む請求項2に記載の方法。
【請求項4】
前記記録されたブロックを、第2のトリガー信号の1つまたは複数のパラメータを使用して処理するステップをさらに含む請求項3に記載の方法。
【請求項5】
前記記録されたブロックを前記処理するステップは、前記第1のトリガー信号の前記パラメータによりソフトウェア・アプリケーションを起動するステップを含む請求項3または4に記載の方法。
【請求項6】
前記記録されたブロックを前記処理するステップは、前記第1のトリガー信号の前記パラメータを使用して前記位置情報の前記導出を単純化するステップを含む請求項3から5のいずれかに記載の方法。
【請求項7】
前記処理するステップが、前記トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプルを記録するステップを含み、当該記録するステップの少なくとも1つのパラメータは、前記トリガー信号の前記1つまたは複数のパラメータに依存する、請求項1に記載の方法。
【請求項8】
少なくとも位置情報を導出するために、前記記録された数ブロックのデータ・サンプルをプロセッサに提供するステップをさらに含む請求項7に記載の方法。
【請求項9】
前記記録するステップの前記少なくとも1つのパラメータは、記録されるデータ・サンプルの数である請求項7または8に記載の方法。
【請求項10】
前記第1のトリガー信号の前記1つまたは複数のパラメータは、前記トリガーの発信元装置を識別する情報および前記トリガーの前記発信元装置のパラメータの少なくとも1つを含む請求項1ないし9のいずれか一項に記載の方法。
【請求項11】
前記発信元装置はカメラであり、前記発信元装置の前記パラメータは、フラッシュをたいたか否かを識別する情報、開口量、焦点距離値、ズーム値、光レベル値、露出時間、被写体距離、配向を識別する情報、およびシーンタイプを識別する情報の少なくとも1つを含む請求項10に記載の方法。
【請求項12】
前記発信元装置は、モーションセンサー、加速度センサー、および配向センサーの少なくとも1つを含む請求項10または11に記載の方法。
【請求項13】
前記トリガー信号の前記1つまたは複数のパラメータは、距離測定、加速度測定、歩数、および車輪回転数のうちの少なくとも1つを含む請求項1ないし12のいずれかに記載の方法。
【請求項14】
前記第1のトリガー信号のパラメータを記録するステップと、
前記記録されたパラメータを前記プロセッサに提供するステップと
をさらに含む請求項8または9に記載の方法。
【請求項15】
前記記録された数ブロックのデータ・サンプルを、請求項3から6のいずれか一項に記載の方法を使用して処理するステップをさらに含む請求項14に記載の方法。
【請求項16】
コンピュータで実行されるとき、請求項1から15のいずれかに記載のステップの全てを実行するようになされたコンピュータプログラムコード手段を含むコンピュータプログラム。
【請求項17】
コンピュータ可読媒体で実施された請求項16に記載のコンピュータプログラム。
【請求項18】
衛星測位システムからの信号を処理するための機器であって、第1のトリガー信号のタイミングおよび前記第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して前記信号を処理するようになされた処理手段を含む機器。
【請求項19】
前記処理手段は、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、前記1つまたは複数のパラメータによる処理方法を使用して処理するようになされたプロセッサである請求項18に記載の機器。
【請求項20】
前記1ブロックのデータ・サンプルを前記1ブロックのデータ・サンプルが記録されたポータブル機器から受け取るようになされた第1の受け取り手段と、
前記第1のトリガー信号の前記1つまたは複数のパラメータを受け取るようになされた第2の受け取り手段と
をさらに含む請求項19に記載の機器。
【請求項21】
前記処理手段は、前記トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプルを記録するようになされた記録手段であり、前記記録することにおける少なくとも1つのパラメータは、前記トリガー信号の前記1つまたは複数のパラメータに依存する、請求項18に記載の機器。
【請求項22】
前記トリガー信号のパラメータを記録するようになされた記録手段をさらに含む請求項21に記載の機器。
【請求項1】
衛星測位システムからの信号を、第1のトリガー信号のタイミングおよび前記第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して処理するステップを含む方法。
【請求項2】
前記処理するステップは、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、前記1つまたは複数のパラメータによる処理方法を使用して処理する請求項1に記載の方法。
【請求項3】
前記ブロックを処理するステップの前に、
前記ブロックを、前記ブロックが記録されたポータブル機器から受け取るステップと、
前記第1のトリガー信号の前記1つまたは複数のパラメータを受け取るステップと
を含む請求項2に記載の方法。
【請求項4】
前記記録されたブロックを、第2のトリガー信号の1つまたは複数のパラメータを使用して処理するステップをさらに含む請求項3に記載の方法。
【請求項5】
前記記録されたブロックを前記処理するステップは、前記第1のトリガー信号の前記パラメータによりソフトウェア・アプリケーションを起動するステップを含む請求項3または4に記載の方法。
【請求項6】
前記記録されたブロックを前記処理するステップは、前記第1のトリガー信号の前記パラメータを使用して前記位置情報の前記導出を単純化するステップを含む請求項3から5のいずれかに記載の方法。
【請求項7】
前記処理するステップが、前記トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプルを記録するステップを含み、当該記録するステップの少なくとも1つのパラメータは、前記トリガー信号の前記1つまたは複数のパラメータに依存する、請求項1に記載の方法。
【請求項8】
少なくとも位置情報を導出するために、前記記録された数ブロックのデータ・サンプルをプロセッサに提供するステップをさらに含む請求項7に記載の方法。
【請求項9】
前記記録するステップの前記少なくとも1つのパラメータは、記録されるデータ・サンプルの数である請求項7または8に記載の方法。
【請求項10】
前記第1のトリガー信号の前記1つまたは複数のパラメータは、前記トリガーの発信元装置を識別する情報および前記トリガーの前記発信元装置のパラメータの少なくとも1つを含む請求項1ないし9のいずれか一項に記載の方法。
【請求項11】
前記発信元装置はカメラであり、前記発信元装置の前記パラメータは、フラッシュをたいたか否かを識別する情報、開口量、焦点距離値、ズーム値、光レベル値、露出時間、被写体距離、配向を識別する情報、およびシーンタイプを識別する情報の少なくとも1つを含む請求項10に記載の方法。
【請求項12】
前記発信元装置は、モーションセンサー、加速度センサー、および配向センサーの少なくとも1つを含む請求項10または11に記載の方法。
【請求項13】
前記トリガー信号の前記1つまたは複数のパラメータは、距離測定、加速度測定、歩数、および車輪回転数のうちの少なくとも1つを含む請求項1ないし12のいずれかに記載の方法。
【請求項14】
前記第1のトリガー信号のパラメータを記録するステップと、
前記記録されたパラメータを前記プロセッサに提供するステップと
をさらに含む請求項8または9に記載の方法。
【請求項15】
前記記録された数ブロックのデータ・サンプルを、請求項3から6のいずれか一項に記載の方法を使用して処理するステップをさらに含む請求項14に記載の方法。
【請求項16】
コンピュータで実行されるとき、請求項1から15のいずれかに記載のステップの全てを実行するようになされたコンピュータプログラムコード手段を含むコンピュータプログラム。
【請求項17】
コンピュータ可読媒体で実施された請求項16に記載のコンピュータプログラム。
【請求項18】
衛星測位システムからの信号を処理するための機器であって、第1のトリガー信号のタイミングおよび前記第1のトリガー信号の1つまたは複数のパラメータによる処理方法を使用して前記信号を処理するようになされた処理手段を含む機器。
【請求項19】
前記処理手段は、少なくとも位置情報を導出するために、衛星放送の1ブロックのデータ・サンプルを、前記1つまたは複数のパラメータによる処理方法を使用して処理するようになされたプロセッサである請求項18に記載の機器。
【請求項20】
前記1ブロックのデータ・サンプルを前記1ブロックのデータ・サンプルが記録されたポータブル機器から受け取るようになされた第1の受け取り手段と、
前記第1のトリガー信号の前記1つまたは複数のパラメータを受け取るようになされた第2の受け取り手段と
をさらに含む請求項19に記載の機器。
【請求項21】
前記処理手段は、前記トリガー信号に応じて、衛星放送の1ブロックのデータ・サンプルを記録するようになされた記録手段であり、前記記録することにおける少なくとも1つのパラメータは、前記トリガー信号の前記1つまたは複数のパラメータに依存する、請求項18に記載の機器。
【請求項22】
前記トリガー信号のパラメータを記録するようになされた記録手段をさらに含む請求項21に記載の機器。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2011−522223(P2011−522223A)
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2011−505600(P2011−505600)
【出願日】平成21年4月23日(2009.4.23)
【国際出願番号】PCT/GB2009/050414
【国際公開番号】WO2009/130512
【国際公開日】平成21年10月29日(2009.10.29)
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成21年4月23日(2009.4.23)
【国際出願番号】PCT/GB2009/050414
【国際公開番号】WO2009/130512
【国際公開日】平成21年10月29日(2009.10.29)
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
[ Back to top ]