
トルクセンサ及びそれを備えた電動パワーステアリング装置
【課題】インピーダンスの波形に重畳している高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができるトルクセンサを提供する。
【解決手段】 円筒部材8の周面を周方向にN等分した角度を一周期角度θ1とすると、窓8Aは、一周期角度θ1の一方の端からa1度の角度の窓幅で開口している。また、被包囲部3bの面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成さている。窓幅比R1(%)=a1/θ1とし、歯幅比R2(%)=a2/θ1とし、窓・歯の平均値V(%)=(窓幅比R1+歯幅比R2)÷2 とすると、31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、円筒部材の全ての窓の窓幅と、被包囲部の全ての歯部の歯幅とを、所定値に設定している。
【解決手段】 円筒部材8の周面を周方向にN等分した角度を一周期角度θ1とすると、窓8Aは、一周期角度θ1の一方の端からa1度の角度の窓幅で開口している。また、被包囲部3bの面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成さている。窓幅比R1(%)=a1/θ1とし、歯幅比R2(%)=a2/θ1とし、窓・歯の平均値V(%)=(窓幅比R1+歯幅比R2)÷2 とすると、31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、円筒部材の全ての窓の窓幅と、被包囲部の全ての歯部の歯幅とを、所定値に設定している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トルクセンサ及びそれを備えた電動パワーステアリング装置に関する。
【背景技術】
【0002】
例えば車両の操舵系の一部に捩じれ方向に弾性変形可能なトーションバーを設けることにより、トーションバーを介して連結される軸間に操舵トルクに比例した相対回転を発生させ、その相対回転を測定することにより操舵トルクを検出することができ、その検出されたトルクに応じて操舵補助トルクを発生させることにより運転者の負担を軽減する電動パワーステアリング装置がある。
この電動パワーステアリング装置の相対回転を測定する形式のトルクセンサとして、例えば特許文献1のように、トルクに応じて変化するコイルのインピーダンスを測定することによりトルクを検出するものが存在する。
【0003】
特許文献1のトルクセンサは、同軸に配設された出力側回転軸と入力側回転軸とを、トーションバーを介して連結するとともに、導電性で且つ非磁性の材料からなる円筒部材を、出力側回転軸の外周面を包囲するように、入力側回転軸に対して回転方向に一体化し、出力側回転軸の少なくともスリーブに包囲された被包囲部を磁性材料で形成している。また、被包囲部の周方向に、所定間隔をあけて複数の溝を形成し、円筒部材の周方向に、所定間隔をあけて複数の窓を形成している。さらに、円筒部材の複数の窓を包囲するようにコイルを配設している。
そして、入力側回転軸及び出力側回転軸のねじれ角度が、円筒部材の窓と被包囲部の溝の重なり具合の変化によりコイルのインピーダンスの変化として現れるので、このインピーダンスの変化をトルク信号として取得している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−61263号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、トルクセンサは、入力側回転軸及び出力側回転軸のねじれ角度の変化を正確なコイルのインピーダンス変化として得るために、インピーダンスの波形を理想的な正弦波状に変化させる必要がある。
しかし、特許文献1のトルクセンサは、インピーダンスの波形に高調波成分が重畳しているので、インピーダンスのp−p中心値と、円筒部材の窓・被包囲部の溝の中立位置がずれてしまい、インピーダンスの波形を理想的な正弦波状の波形として得ることができない。
【0006】
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、インピーダンスの波形に重畳している高調波成分を大幅に減少させることでインピーダンスの波形を理想的な正弦波状に変化させることができ、第1及び第2の回転軸の間に発生するトルクを高精度に検出することができるトルクセンサを及びそれを備えた電動パワーステアリング装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る請求項1記載のトルクセンサは、同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、窓幅比R1(%)=a1/θ1とし、歯幅比R2(%)=a2/θ1とし、窓・歯の平均値V(%)=(窓幅比R1+歯幅比R2)÷2 とすると、31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを、所定値に設定した。
【0008】
また、請求項2記載の発明は、請求項1記載のトルクセンサにおいて、窓・歯の平均値V = 33.3%となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを所定値に設定した。
また、請求項3記載の発明は、請求項1又は2記載のトルクセンサにおいて、前記円筒部材に、前記被包囲部の前記歯部よりも周方向幅の広い前記窓を形成した。
【0009】
また、請求項4記載の発明は、同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、前記円筒部材の全ての前記窓を、窓幅a1:窓以外の閉塞部分b1=1:2となるように形成し、前記被包囲部の全ての前記歯部を、歯幅a2:溝幅b2=1:2となるように形成したことを特徴とするトルクセンサである。
【0010】
また、請求項5記載の発明は、請求項1乃至4の何れか1項に記載のトルクセンサにおいて、前記円筒部材の前記窓が形成された部分を包囲する少なくとも2対のコイルを配設し、これら2対のコイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにした。
さらに、請求項6記載の発明は、請求項1乃至5の何れか1項に記載のトルクセンサを備え、ステアリングホイールを操舵することによって発生した操舵トルクを前記トルクセンサが検出することを特徴とする電動パワーステアリング装置である。
【発明の効果】
【0011】
本発明に係るトルクセンサによれば、31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、円筒部材の全ての窓の窓幅と、被包囲部の全ての歯部の歯幅とを、所定値に設定したので、コイルで発生するインピーダンスの波形に重畳している2次高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができ、第1及び第2の回転軸の間に発生するトルクを高精度に検出することが可能となる。
また、本発明に係る電動パワーステアリング装置によると、ステアリングホイールを操舵することによって発生した操舵トルクを高精度に検出し、操舵補助トルクを伝達することができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る電動パワーステアリング装置の要部を示す断面図である。
【図2】本発明に係るトルクセンサを示す斜視図である。
【図3】トルクセンサを構成する円筒部材及びコイルを示す図である。
【図4】トルクセンサを構成する出力軸のセンサシャフト部を示す図である。
【図5】モータ制御回路の一例を示す図である。
【図6】操舵トルクとコイルのインダクタンスとの関係を示すグラフである。
【図7】円筒部材に形成した窓の窓幅が変化したときの2次高調波成分の変化を示すグラフである。
【図8】窓幅が小さいときのインピーダンスの波形を示す図である。
【図9】窓幅が少し大きくなったときのインピーダンスの波形を示す図である。
【図10】窓幅が大きくなったときのインピーダンスの波形を示す図である。
【図11】窓・歯の平均値と2次高調波成分の関係を示すグラフである。
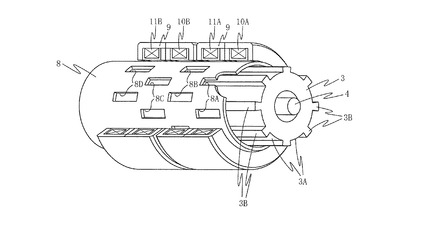
【図12】他の実施形態のトルクセンサを示す斜視図である。
【図13】図12のトルクセンサに対応したモータ制御回路の一例を示す図である。
【発明を実施するための形態】
【0013】
以下、本発明を実施するための形態(以下、実施形態という。)を、図面を参照しながら詳細に説明する。
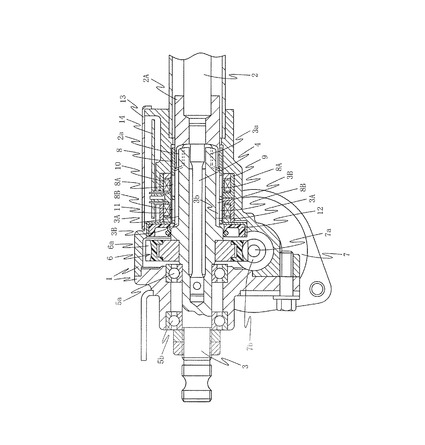
図1は、本発明に係る電動パワーステアリング装置の主要部を示す断面図であり、図2は、本発明に係るトルクセンサの構成を示す斜視図である。
先ず、電動パワーステアリング装置の構成を説明すると、図1に示すように、ハウジング1内に、トーションバー4を介して連結された入力軸2及び出力軸3が、軸受5a及び5bによって回転自在に支持されている。
【0014】
これら入力軸2,出力軸3及びトーションバー4は、同軸に配置されており、入力軸2及びトーションバー4の間は、それら各端部がスプライン結合されるスリーブ2Aを介して連結され、トーションバー4の他端側は出力軸3内の深く入り込んだ位置にスプライン結合されている。また、入力軸2及び出力軸3は、鉄等の磁性材料から形成されている。
入力軸2の図示しない右端側には、ステアリングホイール(不図示)が回転方向に一体に取り付けられており、また、出力軸3の左端には、例えば公知のラックアンドピニオン式ステアリング装置を構成するピニオン軸(不図示)が連結されている。従って、操縦者がステアリングホイールを操舵することによって発生した操舵力は、入力軸2、トーションバー4、出力軸3及びラックアンドピニオン式ステアリング装置を介して転舵輪(不図示)に伝達する。
【0015】
入力軸2の左端部に固定されたスリーブ2Aは、出力軸3の右端部の外周面を包囲するような長さを有している。そして、そのスリーブ2Aの出力軸3の右端部の外周面を包囲する部分の内周面には軸方向に長い複数の凸部2aが形成され、これら凸部2aに対向する出力軸3の外周面には軸方向に長い複数(凸部2aと同数)の溝3aが形成され、それら凸部2a及び溝3aは周方向に余裕を持って嵌め合わされていて、これにより、入力軸2及び出力軸3間の所定範囲(例えば±5度程度)以上の相対回転を防止している。
【0016】
出力軸3には、これと同軸且つ一体に回転するウォームホイール6が外嵌し、このウォームホイール6の樹脂製の噛合部6aと、電動モータ7の出力軸7a外周面に形成されたウォーム7bとが噛み合っている。従って、電動モータ7の回転力は、その出力軸7a,ウォーム7b及びウォームホイール6を介して出力軸3に伝達されるようになっており、電動モータ7の回転方向を適宜切り換えることにより、出力軸3に任意の方向の操舵補助トルクが付与されるようになっている。
入力軸2と一体となっているスリーブ2Aには、出力軸3の外周面に近接してこれを包囲するように、肉薄の円筒部材8が回転方向に一体に固定されている。
【0017】
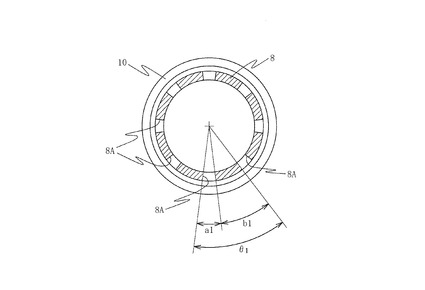
円筒部材8は、導電性で且つ非磁性の材料(例えば、アルミニウム)から形成されており、円筒部材8の出力軸3を包囲する部分のうち、スリーブ2Aに近い側には、図2に示すように、周方向に等間隔離隔した長方形の複数(この実施形態では、8つ)の窓8A,…,8Aからなる第1窓列が形成され、スリーブ2Aから遠い側には、窓8A,…,8Aと位相が180度ずれるように周方向に等間隔離隔した長方形(窓8Aと同形状)の複数(この実施形態では、8つ)の窓8B,…,8Bからなる第2窓列が形成されている。
【0018】
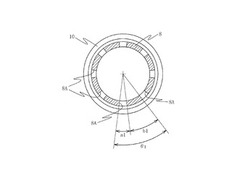
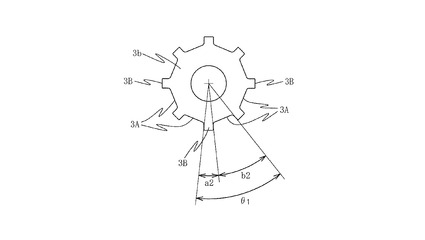
円筒部材8の形状は、図3に示すように、円筒部材8の周面を周方向にN(この例ではN=8)等分した角度を一周期角度θ1(=360/N、この例ではθ1=45度)とし、円筒部材8のスリーブ2Aに近い側の部分では一周期角度θ1の一方の端からa1度の部分が窓8A,…,8Aの周方向幅(窓幅)となり、残りのb1度(b1=θ1−a1)の部分が塞がっている。また、図示しないが、窓8A,…,8Aとの位相が180度ずれるように、円筒部材8のスリーブ2Aから遠い側の部分では一周期角度θ1の他方の端からa1度の部分が窓8B,…,8Bの周方向幅(窓幅)となり、残りのb1度(b1=θ1−a1)の部分が塞がっている。
【0019】
出力軸3の円筒部材8に包囲された部分(以下、センサシャフト部3bと称する)の外周面には、軸方向に延びる横断面略長方形の複数(窓8B,8Bと同数、従ってこの例では8つ)の溝3A,…,3Aが形成されているとともに、これら溝3Aの間に、横断面凸型の歯部3B,…,3Bが形成されている。
出力軸3のセンサシャフト部3bの外周面は、図4に示すように、出力軸3の周面を周方向にN(この例ではN=8)等分した角度を一周期角度θ1(=360/N、この例ではθ1=45度)とし、一周期角度θ1の一方の端からa2度の部分が歯部3Bの周方向幅(歯幅)となり、残りのb2度(b2=θ1−a2)の部分が溝3Aの周方向幅となっている。
【0020】
円筒部材8は、同一規格のコイル10及び11が巻き付けられたヨーク9で包囲されている。即ち、コイル10及び11は、円筒部材8と同軸に配置されていて、コイル10は窓8A,…,8Aが形成された部分を包囲するようにヨーク9に巻き付けられ、コイル11は窓8B,…,8Bが形成された部分を包囲するようにヨーク9に巻き付けられていて、ヨーク9はハウジング1に固定されている。なお、ハウジング1内のウォームホイール6が配設されている空間とヨーク9が配設されている空間との間は、オイルシール12によって隔離されていて、これによりウォームホイール6及びウォーム7の噛み合い部分に供給される潤滑油がヨーク9側に入り込まないようになっている。
【0021】
コイル10及び11は、センサケース13内の制御基板14上に構成されているモータ制御回路(図1には不図示)に接続されている。
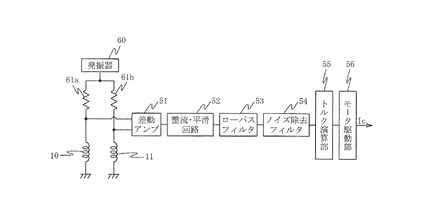
モータ制御回路は、図5に示すように、発振器60、電気抵抗61a、61b、差動アンプ51、整流・平滑回路52、ローパスフィルタ53、ノイズ除去フィルタ54、トルク演算部55及びモータ駆動部56を備えている。
【0022】
コイル10,11には、電気抵抗61a、61bを介して発振器60が電気的に接続され、発振器60からコイル10,11に励磁電流が供給される。
差動アンプ51は、コイル10,11の出力差、すなわち、コイル10,11の端子電圧の差(端子電圧差)を増幅して出力する。整流・平滑回路52は、差動アンプ51の出力を整流、及び平滑して出力する。ノイズ除去フィルタ54は、整流・平滑回路52の出力から高周波ノイズ成分を除去して出力する。
【0023】
トルク演算部55は、ノイズ除去フィルタ54の出力(例えば、平均値)に基づいて、入力軸2と円筒部材8との相対回転変位の方向及び大きさを演算し、その演算結果に、例えば、所定の比例定数を乗じて、操舵系に発生している操舵トルクを求める。モータ駆動部56は、トルク演算部55の演算結果に基づいて、運転者による操舵トルクを軽減する操舵補助トルクを発生できる駆動電流Icを電動モータ7に供給する。
【0024】
次に、本発明に係る電動パワーステアリング装置の動作について説明する。
操舵系が直進状態にあって操舵トルクが零である場合は、トーションバー4には捩れが発生せず、入力軸2と出力軸3とは相対回転しない。出力軸3と円筒部材8との間にも、相対回転は生じない。
一方、ステアリングホイールを操作して入力軸2に回転力が加わると、その回転力はトーションバー4を経て出力軸3に伝達される。このとき、出力軸3には、転舵輪及び路面間の摩擦力や出力軸3の図示しない左端側に構成されたラックアンドピニオン式ステアリング装置のギアの噛み合い等の摩擦力に応じた抵抗力が生じるため、入力軸2及び出力軸3間には、トーションバー4が捩じれることによって出力軸3が遅れる相対回転が発生し、出力軸3及び円筒部材8間にも相対回転が生じる。
【0025】
円筒部材8に窓がない部位では、円筒部材8は導電性で且つ非磁性材(例えば、アルミニウム)で構成されていることから、コイル10,11に交流電流を流して交番磁界を発生させると、円筒部材8の外周面にコイル電流と反対方向の渦電流が発生する。この渦電流による磁界とコイル電流による磁界とを重畳すると、円筒部材8の内側の磁界は相殺される。
【0026】
円筒部材8に窓が形成されている部位では、円筒部材8の外周面に発生した渦電流は、窓8A及び8Bによって外周面を周回できないため、窓8A及び8Bの端面に沿って円筒部材8の内周面側に回り込み、内周面をコイル電流と同方向に流れ、また隣の窓8A及び8Bの端面に沿って外周面側に戻り、ループを形成する。つまり、コイル10,11の内側に渦電流のループを、円周方向に周期的に配置した状態が発生する。コイル電流による磁界と渦電流による磁界とは重畳され、円筒部材8の内外には、円周方向に周期的に強弱変化する磁界と、中心に向かうほど小さくなる半径方向に勾配を持った磁界が形成される。円周方向の周期的な磁界の強弱は、隣り合う渦電流の影響を受ける窓8A及び8Bの中心で強く、そこからずれるに従い弱くなる。
【0027】
円筒部材8の内側に配置された出力軸3のセンサシャフト部3bの歯部3Bは、円筒部材8の8A及び8Bと同じ周期で配置されている。磁界中に置かれた磁性体は磁化して磁束を生じるが、磁束の量は飽和するまでは磁界の強さに応じて大きくなる。このため、円筒部材8により円周方向の周期的な磁界の強弱と中心に向かうほど小さくなる半径方向に勾配を持った磁界とにより、出力軸3に発生する磁束は、円筒部材8と出力軸3との相対的な位相により増減する。磁束が最大となる位相は、円筒部材8の窓8A及び8Bの中心と出力軸3のセンサシャフト部3bの歯部3Bの中心とが一致した状態で、磁束の増減に応じてコイル10及び11のインダクタンスも増減し、略正弦波状に変化する。
【0028】
トルクが作用しない状態では、インダクタンスが最小となる位相(窓8A及び8Bと歯部3Bとが重なっていない位相)に位置に設定されているから、トルクが作用してトーションバー4が捩れ、出力軸3のセンサシャフト部3bと円筒部材8との間に位相差が生じると、2つのコイル10及び11のインダクタンスは、一方が増加し、他方は減少する。
【0029】
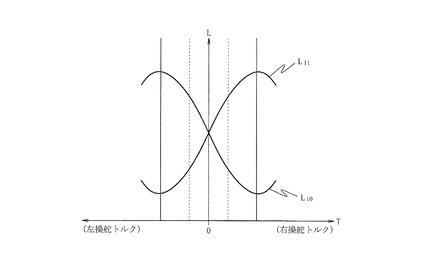
図6は操舵トルクTとコイル10(又は11)のインダクタンスの変化との関係を示す特性線図で、横軸は操舵トルクT、縦軸はインダクタンスLを示す。
右操舵トルク発生時は、図6に示すように、操舵トルクTが増大するにつれ検出コイル10のインダクタンスL10は減少し、コイル11のインダクタンスL11は増加する。
また、左操舵トルク発生時は、図6に示すように、操舵トルクTが増大するにつれ検出コイル10のインダクタンスL10は増加し、検出コイル11のインダクタンスL11のインダクタンスは減少する。
【0030】
そして、インダクタンスL10及びL11が図6に示すように変化すれば、発振部21から供給される電流の周波数ωが一定という条件下では、コイル10及び11のインピーダンスも、図6のインダクタンスL10及びL11と同様の傾向で変化し、コイル10及び11の自己誘導起電力も同様の傾向で変化する。
したがって、コイル10及び11の自己誘導起電力の差を求める差動アンプ51の出力は、操舵トルクの方向及び大きさに従ってリニアに変化するようになる。また、差動アンプ51においてコイル10及び11の端子電圧を求めているため、温度等による自己インダクタンスの変化はキャンセルされる。
【0031】
そして、トルク演算部55は、ノイズ除去フィルタ54を介して供給される整流・平滑回路52MPの出力に基づいて操舵トルクを求め、その結果をモータ駆動部56に供給する。モータ駆動部56は、操舵トルクの方向及び大きさに応じた駆動電流Icを電動モータ7に供給する。すると、電動モータ7には、操舵系に発生している操舵トルクの方向及び大きさに応じた回転力が発生し、その回転力がウォームギア等を介して出力軸3に伝達されるから、出力軸3に操舵補助トルクが付与されたことになり、操舵トルクが減少し、操縦者の負担が軽減される。
【0032】
ところで、上述したコイル10及び11で発生するインピーダンスの波形Z1θは、以下の(1)式のように擬似的に表される。
Z1θ = DC1 + AC1・sinθ + AC2・cos2θ …… (1)
この(1)式のインピーダンスの波形Z1θには、2次高調波成分(AC2・cos2θ)が基本成分に重畳しており、この2次高調波成分が増大すると、インピーダンスの波形Z1θが理想的な正弦波状の波形として得られないので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができない。
【0033】
そこで、以下に示す実施形態のトルクセンサとすることで、インピーダンスの波形を理想的な正弦波状に変化させて操舵トルクを高精度に検出できるようにしている。
具体的には、円筒部材8の窓8A,…,8A(或いは8B,…,8B)の窓幅a1と、出力軸3のセンサシャフト部3bの歯幅a2との関係を、表1のように設定した適用1〜適用6のトルクセンサとすることで、インピーダンスの波形から2次高調波成分の大幅な減少を図っている。
【0034】
【表1】

【0035】
なお、窓幅比R1(%)は、R1=窓幅a1/一周期角度θ1(θ1=45度)であり、歯幅比R2(%)は、R1=歯幅a2/一周期角度θ1(θ1=45度)であり、 窓・歯の平均値V(%)は、V=(窓幅比R1+歯幅比R2)/2である。
【0036】
[第1実施形態のトルクセンサ]
本実施形態では、表1の比較1〜比較3、適用1〜適用6で示すトルクセンサは、円筒部材8の周方向に設けた全ての窓8A,…,8A、窓8B,…,8Bが同一形状に形成されている。
まず、表1の比較1,2及び適用1のトルクセンサについて説明する。
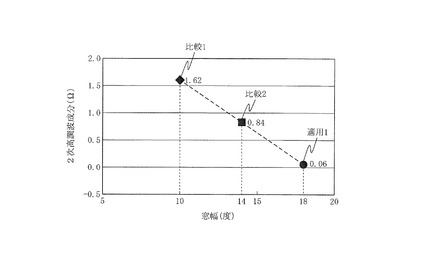
これら表1の比較1,2及び適用1のトルクセンサは、歯幅a2を12.0度に固定した状態で、窓幅a1を、10.0度、14.0度、18.0度に変化させたものであり、これらトルクセンサのインピーダンスを測定した。その結果、図7に示すように、窓幅a1が大きくなるに従い、2次高調波成分の直線的な減少変化が見られ、窓幅a1=18度に設定したときに、インピーダンスの波形から2次高調波成分が最も減少することがわかる。
【0037】
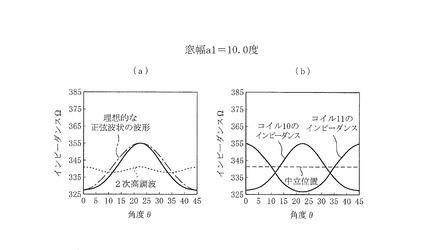
すなわち、歯幅a2=12.0度、窓幅a1=10.0度に設定すると、図8(a)に示すように、2次高調波成分の増大によって理想的な正弦波状の波形とは異なるインピーダンスの波形となり、図8(b)に示すように、コイル10及び11で発生するインピーダンスのp−p中央値が中立位置に一致しない。
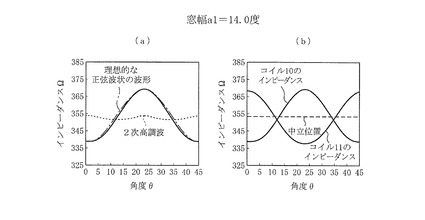
また、歯幅a2=12.0度、窓幅a1=14.0度に設定した場合も、図9(a)に示すように、2次高調波成分の増大により理想的な正弦波状の波形とは異なるインピーダンスの波形となり、図9(b)に示すように、2つのコイル10及び11で発生するインピーダンスのp−p中央値が中立位置に一致しない。
【0038】
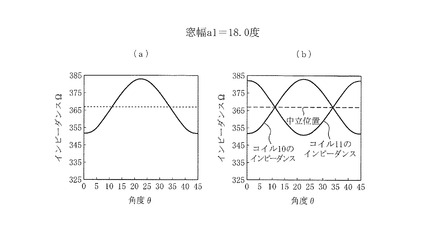
そして、歯幅a2=12.0度、窓幅a1=18.0度に設定した場合には、図10(a)に示すように、2次高調波成分が大幅に減少し(略0となり)、理想的な正弦波状のインピーダンスの波形となるので、図10(b)に示すように、2つのコイル10及び11で発生するインピーダンスのp−p中央値は中立位置に一致する。
ここで、窓幅a1=18.0度、歯幅a2=12.0度とした場合に、窓・歯の平均値Vは33.3%となる。
【0039】
したがって、窓・歯の平均値Vが33.3%となるように、円筒部材8の窓8A,…,8A(或いは8B,…,8B)の窓幅a1及びセンサシャフト部3bの窓幅a1を所定値に設定すると、コイル10及び11で発生するインピーダンスの波形に重畳している高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができるので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができる。
【0040】
次に、表1の比較3及び適用3,4のトルクセンサについて説明する。
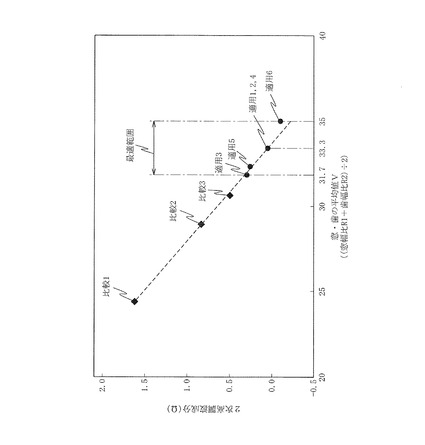
これら表1の比較3及び適用3,4のトルクセンサは、窓幅a1を16.5度に固定した状態で、歯幅a2を、11.0度、12.0度、13.5度に変化させたものであり、これらトルクセンサのインピーダンスを測定した。その結果、図11に示すように、2次高調波成分は、窓・歯の平均値Vに略比例して変化し、平均値Vが増大すると2次高調波成分が減少することがわかる。
【0041】
この中で、窓幅a1=16.5度、歯幅a2=13.5度に設定され、窓・歯の平均値Vが33.3%の適用4のトルクセンサは、図11に示すように、2次高調波成分が大幅に減少するので(略0となり)、前述した適用1と同様に、コイル10及び11で発生するインピーダンスの波形に重畳している2次高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができるので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができる。
【0042】
次に、表1の適用5及び適用6のトルクセンサについて説明する。
適用5のトルクセンサは、窓幅a1=17.0度、歯幅a2=12.0度に設定され、窓・歯の平均値Vが32.2%であり、図11に示すように、2次高調波成分が0.5Ωを下回る小さな値となり、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
【0043】
また、比較6のトルクセンサは、窓幅a1=18.0度、歯幅a2=13.5度に設定され、窓・歯の平均値Vが35.0%であり、図11に示すように、2次高調波成分が、−0.07Ω程の値となる。このように2次高調波成分が小さな値になると、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
したがって、図11において最適範囲と記載したように、窓・歯の平均値Vが、31.7%≦V≦35.0となるように円筒部材8の窓8A,…,8A(或いは8B,…,8B)の窓幅a1及びセンサシャフト部3bの窓幅a1を所定値に設定すると、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
【0044】
さらに、表1の適用2のトルクセンサについて説明する。
表1の適用2のトルクセンサは、窓幅a1及び歯幅a2を15.0度に設定することで、窓幅比R1及び歯幅比R2の両者を33.3%に設定している。
窓幅比R1=33.3%とは、円筒部材8の周面を周方向にN(この例ではN=8)等分した一周期角度θ1において、窓8A,8Bを形成した領域(窓有部)と、窓8A,8Bを形成していない領域(窓無部)との比が、窓有部:窓無部=1:2となっている。
【0045】
また、歯幅比R2=33.3%とは、センサシャフト部3bの周面を周方向にN(この例ではN=8)等分した一周期角度θ1において、歯部3Bを形成した領域(歯有部)と、歯部8Bを形成していない領域(歯無部:溝3A)との比が、歯有部:歯無部=1:2となっている。
適用2のトルクセンサは、図11の前述した適用1,4と同様に、2次高調波成分が大幅に減少する(略0となる)。
【0046】
したがって、円筒部材8の一周期角度θ1において窓有部:窓無部=1:2となるように全ての窓8A(8B)を形成し、且つ、センサシャフト部3bの一周期角度θ1において歯有部:歯無部=1:2となるように溝3A,3Bを形成すると、コイル10及び11で発生するインピーダンスの波形に重畳している高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができるので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができる。
【0047】
さらにまた、適用1、適用3、適用4、適用5及び適用6のトルクセンサは、窓幅a1>歯幅a2の関係となっている。
窓幅a1>歯幅a2の関係となっていると、円筒部材8及び出力軸3のセンサシャフト部3bが相対回転する際に、窓8A(8B)を通じて露出する歯部3Bの表面積が大きくなるので、図6のインダクタンスL10及びL11が上側にオフセットし、その結果、コイル10,11が発生するインピーダンスを増大させることができる。
したがって、適用1、適用3、適用4、適用5及び適用6のトルクセンサは、コイル10,11が発生するインピーダンスを高くし、消費電力を抑えてセンサケース13内の制御基板14上に設けたモータ制御回路の発熱を低減することができる。
【0048】
[第2実施形態のトルクセンサ]
ところで、円筒部材8は、薄肉の円筒形状のアルミニウム材に、窓8A,…,8A及び窓8B,…,8Bを開けて加工しているが、窓8A,…,8Aと窓8B,…,8Bの間の領域が狭すぎると変形し易いので、生産性が低下しやすい。
そこで、本実施形態のトルクセンサは、円筒部材8の周方向に設けたN個の窓8A,…,8Aを窓幅a1=17.0度とし、N個の窓8B,…,8Bを窓幅a1=16.5度とし、センサシャフト部3bの歯幅a2=12.0度としている(表1の適用3及び適用5を組み合わせた構造とする。)。なお、N個の窓8B,…,8Bを窓幅a1=17.0度とし、N個の窓8A,…,8Aを窓幅a1=16.5度としてもよい。
【0049】
このような構造にすると、本実施形態のトルクセンサは、円筒部材8の窓8A,…,8Aと窓8B,…,8Bの間の領域が広くなり変形し難くなるので、円筒部材8の生産性を向上させることができる。
また、本実施形態のトルクセンサは、窓・歯の平均値Vが31.7%の近傍となり、図11に示すように、比較2のトルクセンサ(窓幅a1=14.0度、歯幅a2=12.0度)と比較して、2次高調波成分が1/2を下回る値(0.3Ω程度)となる。したがって、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
【0050】
さらに、本実施形態のトルクセンサは、図11に示すように、窓・歯の平均値Vが35.0%の近傍であっても、2次高調波成分が大幅に減少する。
したがって、本実施形態のトルクセンサも、窓・歯の平均値Vが、31.7%以上、且つ35.0%以下の値となるように窓幅a1及び歯幅a2を設定すると、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように2次高調波成分を減少させることができる。
【0051】
[第3実施形態のトルクセンサ]
さらに、図12に示す円筒部材8は、スリーブ2Aに近い側に周方向に等間隔離隔した長方形の複数(この実施形態では、8つ)の窓8A,…,8Aからなる第1窓列が形成されているとともに、スリーブ2Aから遠い側に向けて、周方向に等間隔離隔した長方形(窓8Aと同形状)の複数の窓8B,…,8Bからなる第2窓列、複数の窓8C,…,8Cからなる第3窓列及び複数の窓8D,…,8Dからなる第4窓列が形成されている。
【0052】
本実施形態の円筒部材8は、同一規格の2対のコイル10A,11A及び10B、11Bが巻き付けられたヨーク9により包囲されている。すなわち、コイル10Aは窓8A,…,8Aからなる第1窓列を包囲するようにヨーク9に巻き付けられ、コイル11Aは窓8B,…,8Bからなる第2窓列を包囲するようにヨーク9に巻き付けられ、コイル10Bは窓8C,…,8Cからなる第3窓列を包囲するようにヨーク9に巻き付けられ、コイル11Bは窓8D,…,8Dからなる第4窓列を包囲するようにヨーク9に巻き付けられている。
【0053】
コイル10及び11は、センサケース13内の制御基板14上に構成されているモータ制御回路(図1には不図示)に接続されている。
モータ制御回路は、図5に示すように、発振器60、電気抵抗61a、61b、差動アンプ51、整流・平滑回路52、ローパスフィルタ53、ノイズ除去フィルタ54、トルク演算部55及びモータ駆動部56を備えている。
コイル10,11には、電気抵抗61a、61bを介して発振器60が電気的に接続され、発振器60からコイル10,11に励磁電流が供給される。
【0054】
差動アンプ51は、コイル10,11の出力差、すなわち、コイル10,11の端子電圧の差(端子電圧差)を増幅して出力する。整流・平滑回路52は、差動アンプ51の出力を整流、及び平滑して出力する。ノイズ除去フィルタ54は、整流・平滑回路52の出力から高周波ノイズ成分を除去して出力する。
トルク演算部55は、ノイズ除去フィルタ54の出力(例えば、平均値)に基づいて、入力軸2と円筒部材8との相対回転変位の方向及び大きさを演算し、その演算結果に、例えば、所定の比例定数を乗じて、操舵系に発生している操舵トルクを求める。モータ駆動部56は、トルク演算部55の演算結果に基づいて、運転者による操舵トルクを軽減する操舵補助トルクを発生できる駆動電流Icを電動モータ7に供給する。
【0055】
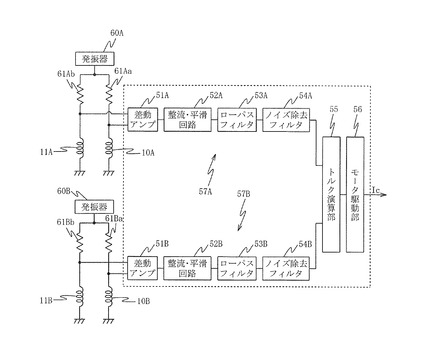
本実施形態の2対のコイル10A,11A及び10B、11Bは、センサケース13内の制御基板14上に構成されているモータ制御回路に接続されている。
モータ制御回路は、図13に示すように、第1信号処理回路57A、第2信号処理回路57B,トルク演算部55及びモータ駆動部56を備えている。
図13に示すように、一方の一対のコイル10A,11Aは、第1発振器60Aが電気的に接続され、第1発振器60Aによってコイル10A,11Aに励磁電流が供給される。また、他方の一対のコイル10B,11Bには、第2発振器60Bが電気的に接続され、第2発振器60Bによってコイル10B,11Bに励磁電流が供給される。第1発振器60A及び第2発振器60Bは、所定の励磁周波数の交流電流を生成する。
【0056】
一方の一対のコイル10A,11Aの一方の端子は、それぞれ電気抵抗61Aa、61Abを介して第1発振器60Aと電気的に接続される。また、コイル10A,11Aの他方の端子は接地される。同様に、他方の一対のコイル10B,11Bの一方の端子は、それぞれ電気抵抗61Ba、61Bbを介して第2発振器60Bと電気的に接続される。また、コイル10B,11Bの他方の端子は接地される。
【0057】
そして、第1信号処理回路57Aは、差動アンプ51A、整流・平滑回路52A、ローパスフィルタ53A及びノイズ除去フィルタ54Aを有する。また、第2信号処理回路57Bは、差動アンプ51B、整流・平滑回路52B、ローパスフィルタ53B及びノイズ除去フィルタ54Bを有する。ここで、それぞれのローパスフィルタ53A、53Bは、それぞれ整流・平滑回路52A、52Bに組み込んでもよい。
【0058】
差動アンプ51Aは、一方の一対のコイル10A,11Aの出力差、すなわち、コイル10A,11Aの端子電圧の差(端子電圧差)を増幅して出力する。整流・平滑回路52Aは、差動アンプ51Aの出力を整流、及び平滑して出力する。ノイズ除去フィルタ54Aは、整流・平滑回路52Aの出力から高周波ノイズ成分を除去して出力する。第1信号処理回路57A及び第2信号処理回路57Bはいずれも同一の構成なので、第2コイル対22Bの出力信号も、第2信号処理回路57Bによって、第1信号処理回路57Aがコイル10A,11Aの出力信号を処理したように処理される。
【0059】
本実施形態によると、インピーダンスを発生する2対のコイルコイル10A,11A及び10B、11Bを設けたことから、冗長性を増して信頼性を向上させたトルクセンサを備えることができる。
ここで、本実施の形態では、入力軸2が第2の回転軸に対応し、出力軸3が第1の回転軸に対応し、出力軸3の円筒部材8に包囲されたセンサシャフト部3bが被包囲部に対応する。
【符号の説明】
【0060】
1…ハウジング、2…入力軸、3…出力軸、3A…溝、3B…歯部、4…トーションバー、5a,5b…軸受、6…ウォームホイール、6a…噛合部、7…電動モータ、7a…出力軸、7b…ウォーム、8…円筒部材、8A,8B,8C,8D…窓、9…ヨーク、10,11,10A,10B、11A,11B…コイル、13…センサケース、14…制御基板、θ1…一周期角度
【技術分野】
【0001】
本発明は、トルクセンサ及びそれを備えた電動パワーステアリング装置に関する。
【背景技術】
【0002】
例えば車両の操舵系の一部に捩じれ方向に弾性変形可能なトーションバーを設けることにより、トーションバーを介して連結される軸間に操舵トルクに比例した相対回転を発生させ、その相対回転を測定することにより操舵トルクを検出することができ、その検出されたトルクに応じて操舵補助トルクを発生させることにより運転者の負担を軽減する電動パワーステアリング装置がある。
この電動パワーステアリング装置の相対回転を測定する形式のトルクセンサとして、例えば特許文献1のように、トルクに応じて変化するコイルのインピーダンスを測定することによりトルクを検出するものが存在する。
【0003】
特許文献1のトルクセンサは、同軸に配設された出力側回転軸と入力側回転軸とを、トーションバーを介して連結するとともに、導電性で且つ非磁性の材料からなる円筒部材を、出力側回転軸の外周面を包囲するように、入力側回転軸に対して回転方向に一体化し、出力側回転軸の少なくともスリーブに包囲された被包囲部を磁性材料で形成している。また、被包囲部の周方向に、所定間隔をあけて複数の溝を形成し、円筒部材の周方向に、所定間隔をあけて複数の窓を形成している。さらに、円筒部材の複数の窓を包囲するようにコイルを配設している。
そして、入力側回転軸及び出力側回転軸のねじれ角度が、円筒部材の窓と被包囲部の溝の重なり具合の変化によりコイルのインピーダンスの変化として現れるので、このインピーダンスの変化をトルク信号として取得している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−61263号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、トルクセンサは、入力側回転軸及び出力側回転軸のねじれ角度の変化を正確なコイルのインピーダンス変化として得るために、インピーダンスの波形を理想的な正弦波状に変化させる必要がある。
しかし、特許文献1のトルクセンサは、インピーダンスの波形に高調波成分が重畳しているので、インピーダンスのp−p中心値と、円筒部材の窓・被包囲部の溝の中立位置がずれてしまい、インピーダンスの波形を理想的な正弦波状の波形として得ることができない。
【0006】
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、インピーダンスの波形に重畳している高調波成分を大幅に減少させることでインピーダンスの波形を理想的な正弦波状に変化させることができ、第1及び第2の回転軸の間に発生するトルクを高精度に検出することができるトルクセンサを及びそれを備えた電動パワーステアリング装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る請求項1記載のトルクセンサは、同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、窓幅比R1(%)=a1/θ1とし、歯幅比R2(%)=a2/θ1とし、窓・歯の平均値V(%)=(窓幅比R1+歯幅比R2)÷2 とすると、31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを、所定値に設定した。
【0008】
また、請求項2記載の発明は、請求項1記載のトルクセンサにおいて、窓・歯の平均値V = 33.3%となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを所定値に設定した。
また、請求項3記載の発明は、請求項1又は2記載のトルクセンサにおいて、前記円筒部材に、前記被包囲部の前記歯部よりも周方向幅の広い前記窓を形成した。
【0009】
また、請求項4記載の発明は、同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、前記円筒部材の全ての前記窓を、窓幅a1:窓以外の閉塞部分b1=1:2となるように形成し、前記被包囲部の全ての前記歯部を、歯幅a2:溝幅b2=1:2となるように形成したことを特徴とするトルクセンサである。
【0010】
また、請求項5記載の発明は、請求項1乃至4の何れか1項に記載のトルクセンサにおいて、前記円筒部材の前記窓が形成された部分を包囲する少なくとも2対のコイルを配設し、これら2対のコイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにした。
さらに、請求項6記載の発明は、請求項1乃至5の何れか1項に記載のトルクセンサを備え、ステアリングホイールを操舵することによって発生した操舵トルクを前記トルクセンサが検出することを特徴とする電動パワーステアリング装置である。
【発明の効果】
【0011】
本発明に係るトルクセンサによれば、31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、円筒部材の全ての窓の窓幅と、被包囲部の全ての歯部の歯幅とを、所定値に設定したので、コイルで発生するインピーダンスの波形に重畳している2次高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができ、第1及び第2の回転軸の間に発生するトルクを高精度に検出することが可能となる。
また、本発明に係る電動パワーステアリング装置によると、ステアリングホイールを操舵することによって発生した操舵トルクを高精度に検出し、操舵補助トルクを伝達することができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る電動パワーステアリング装置の要部を示す断面図である。
【図2】本発明に係るトルクセンサを示す斜視図である。
【図3】トルクセンサを構成する円筒部材及びコイルを示す図である。
【図4】トルクセンサを構成する出力軸のセンサシャフト部を示す図である。
【図5】モータ制御回路の一例を示す図である。
【図6】操舵トルクとコイルのインダクタンスとの関係を示すグラフである。
【図7】円筒部材に形成した窓の窓幅が変化したときの2次高調波成分の変化を示すグラフである。
【図8】窓幅が小さいときのインピーダンスの波形を示す図である。
【図9】窓幅が少し大きくなったときのインピーダンスの波形を示す図である。
【図10】窓幅が大きくなったときのインピーダンスの波形を示す図である。
【図11】窓・歯の平均値と2次高調波成分の関係を示すグラフである。
【図12】他の実施形態のトルクセンサを示す斜視図である。
【図13】図12のトルクセンサに対応したモータ制御回路の一例を示す図である。
【発明を実施するための形態】
【0013】
以下、本発明を実施するための形態(以下、実施形態という。)を、図面を参照しながら詳細に説明する。
図1は、本発明に係る電動パワーステアリング装置の主要部を示す断面図であり、図2は、本発明に係るトルクセンサの構成を示す斜視図である。
先ず、電動パワーステアリング装置の構成を説明すると、図1に示すように、ハウジング1内に、トーションバー4を介して連結された入力軸2及び出力軸3が、軸受5a及び5bによって回転自在に支持されている。
【0014】
これら入力軸2,出力軸3及びトーションバー4は、同軸に配置されており、入力軸2及びトーションバー4の間は、それら各端部がスプライン結合されるスリーブ2Aを介して連結され、トーションバー4の他端側は出力軸3内の深く入り込んだ位置にスプライン結合されている。また、入力軸2及び出力軸3は、鉄等の磁性材料から形成されている。
入力軸2の図示しない右端側には、ステアリングホイール(不図示)が回転方向に一体に取り付けられており、また、出力軸3の左端には、例えば公知のラックアンドピニオン式ステアリング装置を構成するピニオン軸(不図示)が連結されている。従って、操縦者がステアリングホイールを操舵することによって発生した操舵力は、入力軸2、トーションバー4、出力軸3及びラックアンドピニオン式ステアリング装置を介して転舵輪(不図示)に伝達する。
【0015】
入力軸2の左端部に固定されたスリーブ2Aは、出力軸3の右端部の外周面を包囲するような長さを有している。そして、そのスリーブ2Aの出力軸3の右端部の外周面を包囲する部分の内周面には軸方向に長い複数の凸部2aが形成され、これら凸部2aに対向する出力軸3の外周面には軸方向に長い複数(凸部2aと同数)の溝3aが形成され、それら凸部2a及び溝3aは周方向に余裕を持って嵌め合わされていて、これにより、入力軸2及び出力軸3間の所定範囲(例えば±5度程度)以上の相対回転を防止している。
【0016】
出力軸3には、これと同軸且つ一体に回転するウォームホイール6が外嵌し、このウォームホイール6の樹脂製の噛合部6aと、電動モータ7の出力軸7a外周面に形成されたウォーム7bとが噛み合っている。従って、電動モータ7の回転力は、その出力軸7a,ウォーム7b及びウォームホイール6を介して出力軸3に伝達されるようになっており、電動モータ7の回転方向を適宜切り換えることにより、出力軸3に任意の方向の操舵補助トルクが付与されるようになっている。
入力軸2と一体となっているスリーブ2Aには、出力軸3の外周面に近接してこれを包囲するように、肉薄の円筒部材8が回転方向に一体に固定されている。
【0017】
円筒部材8は、導電性で且つ非磁性の材料(例えば、アルミニウム)から形成されており、円筒部材8の出力軸3を包囲する部分のうち、スリーブ2Aに近い側には、図2に示すように、周方向に等間隔離隔した長方形の複数(この実施形態では、8つ)の窓8A,…,8Aからなる第1窓列が形成され、スリーブ2Aから遠い側には、窓8A,…,8Aと位相が180度ずれるように周方向に等間隔離隔した長方形(窓8Aと同形状)の複数(この実施形態では、8つ)の窓8B,…,8Bからなる第2窓列が形成されている。
【0018】
円筒部材8の形状は、図3に示すように、円筒部材8の周面を周方向にN(この例ではN=8)等分した角度を一周期角度θ1(=360/N、この例ではθ1=45度)とし、円筒部材8のスリーブ2Aに近い側の部分では一周期角度θ1の一方の端からa1度の部分が窓8A,…,8Aの周方向幅(窓幅)となり、残りのb1度(b1=θ1−a1)の部分が塞がっている。また、図示しないが、窓8A,…,8Aとの位相が180度ずれるように、円筒部材8のスリーブ2Aから遠い側の部分では一周期角度θ1の他方の端からa1度の部分が窓8B,…,8Bの周方向幅(窓幅)となり、残りのb1度(b1=θ1−a1)の部分が塞がっている。
【0019】
出力軸3の円筒部材8に包囲された部分(以下、センサシャフト部3bと称する)の外周面には、軸方向に延びる横断面略長方形の複数(窓8B,8Bと同数、従ってこの例では8つ)の溝3A,…,3Aが形成されているとともに、これら溝3Aの間に、横断面凸型の歯部3B,…,3Bが形成されている。
出力軸3のセンサシャフト部3bの外周面は、図4に示すように、出力軸3の周面を周方向にN(この例ではN=8)等分した角度を一周期角度θ1(=360/N、この例ではθ1=45度)とし、一周期角度θ1の一方の端からa2度の部分が歯部3Bの周方向幅(歯幅)となり、残りのb2度(b2=θ1−a2)の部分が溝3Aの周方向幅となっている。
【0020】
円筒部材8は、同一規格のコイル10及び11が巻き付けられたヨーク9で包囲されている。即ち、コイル10及び11は、円筒部材8と同軸に配置されていて、コイル10は窓8A,…,8Aが形成された部分を包囲するようにヨーク9に巻き付けられ、コイル11は窓8B,…,8Bが形成された部分を包囲するようにヨーク9に巻き付けられていて、ヨーク9はハウジング1に固定されている。なお、ハウジング1内のウォームホイール6が配設されている空間とヨーク9が配設されている空間との間は、オイルシール12によって隔離されていて、これによりウォームホイール6及びウォーム7の噛み合い部分に供給される潤滑油がヨーク9側に入り込まないようになっている。
【0021】
コイル10及び11は、センサケース13内の制御基板14上に構成されているモータ制御回路(図1には不図示)に接続されている。
モータ制御回路は、図5に示すように、発振器60、電気抵抗61a、61b、差動アンプ51、整流・平滑回路52、ローパスフィルタ53、ノイズ除去フィルタ54、トルク演算部55及びモータ駆動部56を備えている。
【0022】
コイル10,11には、電気抵抗61a、61bを介して発振器60が電気的に接続され、発振器60からコイル10,11に励磁電流が供給される。
差動アンプ51は、コイル10,11の出力差、すなわち、コイル10,11の端子電圧の差(端子電圧差)を増幅して出力する。整流・平滑回路52は、差動アンプ51の出力を整流、及び平滑して出力する。ノイズ除去フィルタ54は、整流・平滑回路52の出力から高周波ノイズ成分を除去して出力する。
【0023】
トルク演算部55は、ノイズ除去フィルタ54の出力(例えば、平均値)に基づいて、入力軸2と円筒部材8との相対回転変位の方向及び大きさを演算し、その演算結果に、例えば、所定の比例定数を乗じて、操舵系に発生している操舵トルクを求める。モータ駆動部56は、トルク演算部55の演算結果に基づいて、運転者による操舵トルクを軽減する操舵補助トルクを発生できる駆動電流Icを電動モータ7に供給する。
【0024】
次に、本発明に係る電動パワーステアリング装置の動作について説明する。
操舵系が直進状態にあって操舵トルクが零である場合は、トーションバー4には捩れが発生せず、入力軸2と出力軸3とは相対回転しない。出力軸3と円筒部材8との間にも、相対回転は生じない。
一方、ステアリングホイールを操作して入力軸2に回転力が加わると、その回転力はトーションバー4を経て出力軸3に伝達される。このとき、出力軸3には、転舵輪及び路面間の摩擦力や出力軸3の図示しない左端側に構成されたラックアンドピニオン式ステアリング装置のギアの噛み合い等の摩擦力に応じた抵抗力が生じるため、入力軸2及び出力軸3間には、トーションバー4が捩じれることによって出力軸3が遅れる相対回転が発生し、出力軸3及び円筒部材8間にも相対回転が生じる。
【0025】
円筒部材8に窓がない部位では、円筒部材8は導電性で且つ非磁性材(例えば、アルミニウム)で構成されていることから、コイル10,11に交流電流を流して交番磁界を発生させると、円筒部材8の外周面にコイル電流と反対方向の渦電流が発生する。この渦電流による磁界とコイル電流による磁界とを重畳すると、円筒部材8の内側の磁界は相殺される。
【0026】
円筒部材8に窓が形成されている部位では、円筒部材8の外周面に発生した渦電流は、窓8A及び8Bによって外周面を周回できないため、窓8A及び8Bの端面に沿って円筒部材8の内周面側に回り込み、内周面をコイル電流と同方向に流れ、また隣の窓8A及び8Bの端面に沿って外周面側に戻り、ループを形成する。つまり、コイル10,11の内側に渦電流のループを、円周方向に周期的に配置した状態が発生する。コイル電流による磁界と渦電流による磁界とは重畳され、円筒部材8の内外には、円周方向に周期的に強弱変化する磁界と、中心に向かうほど小さくなる半径方向に勾配を持った磁界が形成される。円周方向の周期的な磁界の強弱は、隣り合う渦電流の影響を受ける窓8A及び8Bの中心で強く、そこからずれるに従い弱くなる。
【0027】
円筒部材8の内側に配置された出力軸3のセンサシャフト部3bの歯部3Bは、円筒部材8の8A及び8Bと同じ周期で配置されている。磁界中に置かれた磁性体は磁化して磁束を生じるが、磁束の量は飽和するまでは磁界の強さに応じて大きくなる。このため、円筒部材8により円周方向の周期的な磁界の強弱と中心に向かうほど小さくなる半径方向に勾配を持った磁界とにより、出力軸3に発生する磁束は、円筒部材8と出力軸3との相対的な位相により増減する。磁束が最大となる位相は、円筒部材8の窓8A及び8Bの中心と出力軸3のセンサシャフト部3bの歯部3Bの中心とが一致した状態で、磁束の増減に応じてコイル10及び11のインダクタンスも増減し、略正弦波状に変化する。
【0028】
トルクが作用しない状態では、インダクタンスが最小となる位相(窓8A及び8Bと歯部3Bとが重なっていない位相)に位置に設定されているから、トルクが作用してトーションバー4が捩れ、出力軸3のセンサシャフト部3bと円筒部材8との間に位相差が生じると、2つのコイル10及び11のインダクタンスは、一方が増加し、他方は減少する。
【0029】
図6は操舵トルクTとコイル10(又は11)のインダクタンスの変化との関係を示す特性線図で、横軸は操舵トルクT、縦軸はインダクタンスLを示す。
右操舵トルク発生時は、図6に示すように、操舵トルクTが増大するにつれ検出コイル10のインダクタンスL10は減少し、コイル11のインダクタンスL11は増加する。
また、左操舵トルク発生時は、図6に示すように、操舵トルクTが増大するにつれ検出コイル10のインダクタンスL10は増加し、検出コイル11のインダクタンスL11のインダクタンスは減少する。
【0030】
そして、インダクタンスL10及びL11が図6に示すように変化すれば、発振部21から供給される電流の周波数ωが一定という条件下では、コイル10及び11のインピーダンスも、図6のインダクタンスL10及びL11と同様の傾向で変化し、コイル10及び11の自己誘導起電力も同様の傾向で変化する。
したがって、コイル10及び11の自己誘導起電力の差を求める差動アンプ51の出力は、操舵トルクの方向及び大きさに従ってリニアに変化するようになる。また、差動アンプ51においてコイル10及び11の端子電圧を求めているため、温度等による自己インダクタンスの変化はキャンセルされる。
【0031】
そして、トルク演算部55は、ノイズ除去フィルタ54を介して供給される整流・平滑回路52MPの出力に基づいて操舵トルクを求め、その結果をモータ駆動部56に供給する。モータ駆動部56は、操舵トルクの方向及び大きさに応じた駆動電流Icを電動モータ7に供給する。すると、電動モータ7には、操舵系に発生している操舵トルクの方向及び大きさに応じた回転力が発生し、その回転力がウォームギア等を介して出力軸3に伝達されるから、出力軸3に操舵補助トルクが付与されたことになり、操舵トルクが減少し、操縦者の負担が軽減される。
【0032】
ところで、上述したコイル10及び11で発生するインピーダンスの波形Z1θは、以下の(1)式のように擬似的に表される。
Z1θ = DC1 + AC1・sinθ + AC2・cos2θ …… (1)
この(1)式のインピーダンスの波形Z1θには、2次高調波成分(AC2・cos2θ)が基本成分に重畳しており、この2次高調波成分が増大すると、インピーダンスの波形Z1θが理想的な正弦波状の波形として得られないので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができない。
【0033】
そこで、以下に示す実施形態のトルクセンサとすることで、インピーダンスの波形を理想的な正弦波状に変化させて操舵トルクを高精度に検出できるようにしている。
具体的には、円筒部材8の窓8A,…,8A(或いは8B,…,8B)の窓幅a1と、出力軸3のセンサシャフト部3bの歯幅a2との関係を、表1のように設定した適用1〜適用6のトルクセンサとすることで、インピーダンスの波形から2次高調波成分の大幅な減少を図っている。
【0034】
【表1】
【0035】
なお、窓幅比R1(%)は、R1=窓幅a1/一周期角度θ1(θ1=45度)であり、歯幅比R2(%)は、R1=歯幅a2/一周期角度θ1(θ1=45度)であり、 窓・歯の平均値V(%)は、V=(窓幅比R1+歯幅比R2)/2である。
【0036】
[第1実施形態のトルクセンサ]
本実施形態では、表1の比較1〜比較3、適用1〜適用6で示すトルクセンサは、円筒部材8の周方向に設けた全ての窓8A,…,8A、窓8B,…,8Bが同一形状に形成されている。
まず、表1の比較1,2及び適用1のトルクセンサについて説明する。
これら表1の比較1,2及び適用1のトルクセンサは、歯幅a2を12.0度に固定した状態で、窓幅a1を、10.0度、14.0度、18.0度に変化させたものであり、これらトルクセンサのインピーダンスを測定した。その結果、図7に示すように、窓幅a1が大きくなるに従い、2次高調波成分の直線的な減少変化が見られ、窓幅a1=18度に設定したときに、インピーダンスの波形から2次高調波成分が最も減少することがわかる。
【0037】
すなわち、歯幅a2=12.0度、窓幅a1=10.0度に設定すると、図8(a)に示すように、2次高調波成分の増大によって理想的な正弦波状の波形とは異なるインピーダンスの波形となり、図8(b)に示すように、コイル10及び11で発生するインピーダンスのp−p中央値が中立位置に一致しない。
また、歯幅a2=12.0度、窓幅a1=14.0度に設定した場合も、図9(a)に示すように、2次高調波成分の増大により理想的な正弦波状の波形とは異なるインピーダンスの波形となり、図9(b)に示すように、2つのコイル10及び11で発生するインピーダンスのp−p中央値が中立位置に一致しない。
【0038】
そして、歯幅a2=12.0度、窓幅a1=18.0度に設定した場合には、図10(a)に示すように、2次高調波成分が大幅に減少し(略0となり)、理想的な正弦波状のインピーダンスの波形となるので、図10(b)に示すように、2つのコイル10及び11で発生するインピーダンスのp−p中央値は中立位置に一致する。
ここで、窓幅a1=18.0度、歯幅a2=12.0度とした場合に、窓・歯の平均値Vは33.3%となる。
【0039】
したがって、窓・歯の平均値Vが33.3%となるように、円筒部材8の窓8A,…,8A(或いは8B,…,8B)の窓幅a1及びセンサシャフト部3bの窓幅a1を所定値に設定すると、コイル10及び11で発生するインピーダンスの波形に重畳している高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができるので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができる。
【0040】
次に、表1の比較3及び適用3,4のトルクセンサについて説明する。
これら表1の比較3及び適用3,4のトルクセンサは、窓幅a1を16.5度に固定した状態で、歯幅a2を、11.0度、12.0度、13.5度に変化させたものであり、これらトルクセンサのインピーダンスを測定した。その結果、図11に示すように、2次高調波成分は、窓・歯の平均値Vに略比例して変化し、平均値Vが増大すると2次高調波成分が減少することがわかる。
【0041】
この中で、窓幅a1=16.5度、歯幅a2=13.5度に設定され、窓・歯の平均値Vが33.3%の適用4のトルクセンサは、図11に示すように、2次高調波成分が大幅に減少するので(略0となり)、前述した適用1と同様に、コイル10及び11で発生するインピーダンスの波形に重畳している2次高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができるので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができる。
【0042】
次に、表1の適用5及び適用6のトルクセンサについて説明する。
適用5のトルクセンサは、窓幅a1=17.0度、歯幅a2=12.0度に設定され、窓・歯の平均値Vが32.2%であり、図11に示すように、2次高調波成分が0.5Ωを下回る小さな値となり、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
【0043】
また、比較6のトルクセンサは、窓幅a1=18.0度、歯幅a2=13.5度に設定され、窓・歯の平均値Vが35.0%であり、図11に示すように、2次高調波成分が、−0.07Ω程の値となる。このように2次高調波成分が小さな値になると、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
したがって、図11において最適範囲と記載したように、窓・歯の平均値Vが、31.7%≦V≦35.0となるように円筒部材8の窓8A,…,8A(或いは8B,…,8B)の窓幅a1及びセンサシャフト部3bの窓幅a1を所定値に設定すると、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
【0044】
さらに、表1の適用2のトルクセンサについて説明する。
表1の適用2のトルクセンサは、窓幅a1及び歯幅a2を15.0度に設定することで、窓幅比R1及び歯幅比R2の両者を33.3%に設定している。
窓幅比R1=33.3%とは、円筒部材8の周面を周方向にN(この例ではN=8)等分した一周期角度θ1において、窓8A,8Bを形成した領域(窓有部)と、窓8A,8Bを形成していない領域(窓無部)との比が、窓有部:窓無部=1:2となっている。
【0045】
また、歯幅比R2=33.3%とは、センサシャフト部3bの周面を周方向にN(この例ではN=8)等分した一周期角度θ1において、歯部3Bを形成した領域(歯有部)と、歯部8Bを形成していない領域(歯無部:溝3A)との比が、歯有部:歯無部=1:2となっている。
適用2のトルクセンサは、図11の前述した適用1,4と同様に、2次高調波成分が大幅に減少する(略0となる)。
【0046】
したがって、円筒部材8の一周期角度θ1において窓有部:窓無部=1:2となるように全ての窓8A(8B)を形成し、且つ、センサシャフト部3bの一周期角度θ1において歯有部:歯無部=1:2となるように溝3A,3Bを形成すると、コイル10及び11で発生するインピーダンスの波形に重畳している高調波成分を大幅に減少させてインピーダンスの波形を理想的な正弦波状に変化させることができるので、モータ制御回路のトルク演算部26は、操舵トルクの大きさを高精度に検出することができる。
【0047】
さらにまた、適用1、適用3、適用4、適用5及び適用6のトルクセンサは、窓幅a1>歯幅a2の関係となっている。
窓幅a1>歯幅a2の関係となっていると、円筒部材8及び出力軸3のセンサシャフト部3bが相対回転する際に、窓8A(8B)を通じて露出する歯部3Bの表面積が大きくなるので、図6のインダクタンスL10及びL11が上側にオフセットし、その結果、コイル10,11が発生するインピーダンスを増大させることができる。
したがって、適用1、適用3、適用4、適用5及び適用6のトルクセンサは、コイル10,11が発生するインピーダンスを高くし、消費電力を抑えてセンサケース13内の制御基板14上に設けたモータ制御回路の発熱を低減することができる。
【0048】
[第2実施形態のトルクセンサ]
ところで、円筒部材8は、薄肉の円筒形状のアルミニウム材に、窓8A,…,8A及び窓8B,…,8Bを開けて加工しているが、窓8A,…,8Aと窓8B,…,8Bの間の領域が狭すぎると変形し易いので、生産性が低下しやすい。
そこで、本実施形態のトルクセンサは、円筒部材8の周方向に設けたN個の窓8A,…,8Aを窓幅a1=17.0度とし、N個の窓8B,…,8Bを窓幅a1=16.5度とし、センサシャフト部3bの歯幅a2=12.0度としている(表1の適用3及び適用5を組み合わせた構造とする。)。なお、N個の窓8B,…,8Bを窓幅a1=17.0度とし、N個の窓8A,…,8Aを窓幅a1=16.5度としてもよい。
【0049】
このような構造にすると、本実施形態のトルクセンサは、円筒部材8の窓8A,…,8Aと窓8B,…,8Bの間の領域が広くなり変形し難くなるので、円筒部材8の生産性を向上させることができる。
また、本実施形態のトルクセンサは、窓・歯の平均値Vが31.7%の近傍となり、図11に示すように、比較2のトルクセンサ(窓幅a1=14.0度、歯幅a2=12.0度)と比較して、2次高調波成分が1/2を下回る値(0.3Ω程度)となる。したがって、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように、2次高調波成分を減少させることができる。
【0050】
さらに、本実施形態のトルクセンサは、図11に示すように、窓・歯の平均値Vが35.0%の近傍であっても、2次高調波成分が大幅に減少する。
したがって、本実施形態のトルクセンサも、窓・歯の平均値Vが、31.7%以上、且つ35.0%以下の値となるように窓幅a1及び歯幅a2を設定すると、コイル10及び11で発生するインピーダンスの波形が理想的な正弦波状となるように2次高調波成分を減少させることができる。
【0051】
[第3実施形態のトルクセンサ]
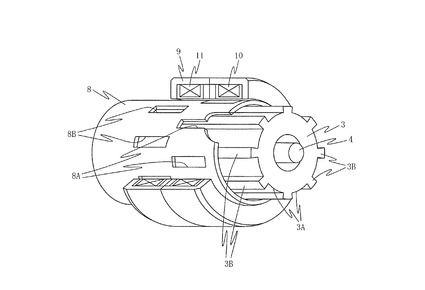
さらに、図12に示す円筒部材8は、スリーブ2Aに近い側に周方向に等間隔離隔した長方形の複数(この実施形態では、8つ)の窓8A,…,8Aからなる第1窓列が形成されているとともに、スリーブ2Aから遠い側に向けて、周方向に等間隔離隔した長方形(窓8Aと同形状)の複数の窓8B,…,8Bからなる第2窓列、複数の窓8C,…,8Cからなる第3窓列及び複数の窓8D,…,8Dからなる第4窓列が形成されている。
【0052】
本実施形態の円筒部材8は、同一規格の2対のコイル10A,11A及び10B、11Bが巻き付けられたヨーク9により包囲されている。すなわち、コイル10Aは窓8A,…,8Aからなる第1窓列を包囲するようにヨーク9に巻き付けられ、コイル11Aは窓8B,…,8Bからなる第2窓列を包囲するようにヨーク9に巻き付けられ、コイル10Bは窓8C,…,8Cからなる第3窓列を包囲するようにヨーク9に巻き付けられ、コイル11Bは窓8D,…,8Dからなる第4窓列を包囲するようにヨーク9に巻き付けられている。
【0053】
コイル10及び11は、センサケース13内の制御基板14上に構成されているモータ制御回路(図1には不図示)に接続されている。
モータ制御回路は、図5に示すように、発振器60、電気抵抗61a、61b、差動アンプ51、整流・平滑回路52、ローパスフィルタ53、ノイズ除去フィルタ54、トルク演算部55及びモータ駆動部56を備えている。
コイル10,11には、電気抵抗61a、61bを介して発振器60が電気的に接続され、発振器60からコイル10,11に励磁電流が供給される。
【0054】
差動アンプ51は、コイル10,11の出力差、すなわち、コイル10,11の端子電圧の差(端子電圧差)を増幅して出力する。整流・平滑回路52は、差動アンプ51の出力を整流、及び平滑して出力する。ノイズ除去フィルタ54は、整流・平滑回路52の出力から高周波ノイズ成分を除去して出力する。
トルク演算部55は、ノイズ除去フィルタ54の出力(例えば、平均値)に基づいて、入力軸2と円筒部材8との相対回転変位の方向及び大きさを演算し、その演算結果に、例えば、所定の比例定数を乗じて、操舵系に発生している操舵トルクを求める。モータ駆動部56は、トルク演算部55の演算結果に基づいて、運転者による操舵トルクを軽減する操舵補助トルクを発生できる駆動電流Icを電動モータ7に供給する。
【0055】
本実施形態の2対のコイル10A,11A及び10B、11Bは、センサケース13内の制御基板14上に構成されているモータ制御回路に接続されている。
モータ制御回路は、図13に示すように、第1信号処理回路57A、第2信号処理回路57B,トルク演算部55及びモータ駆動部56を備えている。
図13に示すように、一方の一対のコイル10A,11Aは、第1発振器60Aが電気的に接続され、第1発振器60Aによってコイル10A,11Aに励磁電流が供給される。また、他方の一対のコイル10B,11Bには、第2発振器60Bが電気的に接続され、第2発振器60Bによってコイル10B,11Bに励磁電流が供給される。第1発振器60A及び第2発振器60Bは、所定の励磁周波数の交流電流を生成する。
【0056】
一方の一対のコイル10A,11Aの一方の端子は、それぞれ電気抵抗61Aa、61Abを介して第1発振器60Aと電気的に接続される。また、コイル10A,11Aの他方の端子は接地される。同様に、他方の一対のコイル10B,11Bの一方の端子は、それぞれ電気抵抗61Ba、61Bbを介して第2発振器60Bと電気的に接続される。また、コイル10B,11Bの他方の端子は接地される。
【0057】
そして、第1信号処理回路57Aは、差動アンプ51A、整流・平滑回路52A、ローパスフィルタ53A及びノイズ除去フィルタ54Aを有する。また、第2信号処理回路57Bは、差動アンプ51B、整流・平滑回路52B、ローパスフィルタ53B及びノイズ除去フィルタ54Bを有する。ここで、それぞれのローパスフィルタ53A、53Bは、それぞれ整流・平滑回路52A、52Bに組み込んでもよい。
【0058】
差動アンプ51Aは、一方の一対のコイル10A,11Aの出力差、すなわち、コイル10A,11Aの端子電圧の差(端子電圧差)を増幅して出力する。整流・平滑回路52Aは、差動アンプ51Aの出力を整流、及び平滑して出力する。ノイズ除去フィルタ54Aは、整流・平滑回路52Aの出力から高周波ノイズ成分を除去して出力する。第1信号処理回路57A及び第2信号処理回路57Bはいずれも同一の構成なので、第2コイル対22Bの出力信号も、第2信号処理回路57Bによって、第1信号処理回路57Aがコイル10A,11Aの出力信号を処理したように処理される。
【0059】
本実施形態によると、インピーダンスを発生する2対のコイルコイル10A,11A及び10B、11Bを設けたことから、冗長性を増して信頼性を向上させたトルクセンサを備えることができる。
ここで、本実施の形態では、入力軸2が第2の回転軸に対応し、出力軸3が第1の回転軸に対応し、出力軸3の円筒部材8に包囲されたセンサシャフト部3bが被包囲部に対応する。
【符号の説明】
【0060】
1…ハウジング、2…入力軸、3…出力軸、3A…溝、3B…歯部、4…トーションバー、5a,5b…軸受、6…ウォームホイール、6a…噛合部、7…電動モータ、7a…出力軸、7b…ウォーム、8…円筒部材、8A,8B,8C,8D…窓、9…ヨーク、10,11,10A,10B、11A,11B…コイル、13…センサケース、14…制御基板、θ1…一周期角度
【特許請求の範囲】
【請求項1】
同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、
導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、
前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、
前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、
前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、
前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、
前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、
前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、
窓幅比R1(%)=a1/θ1とし、
歯幅比R2(%)=a2/θ1とし、
窓・歯の平均値V(%)=(窓幅比R1+歯幅比R2)÷2 とすると、
31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを、所定値に設定したことを特徴とするトルクセンサ。
【請求項2】
窓・歯の平均値V = 33.3%となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを、所定値に設定したことを特徴とする請求項1記載のトルクセンサ。
【請求項3】
前記円筒部材に、前記被包囲部の前記歯部よりも周方向幅の広い前記窓を形成したことを特徴とする請求項1又は2記載のトルクセンサ。
【請求項4】
同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、
導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、
前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、
前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、
前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、
前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、
前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、
前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、
前記円筒部材の全ての前記窓を、窓幅a1:窓以外の部分b1=1:2となるように形成し、
前記被包囲部の全ての前記歯部を、歯幅a2:溝幅b2=1:2となるように形成したことを特徴とするトルクセンサ。
【請求項5】
前記円筒部材の前記窓が形成された部分を包囲する少なくとも2対のコイルを配設し、これら2対のコイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたことを特徴とする請求項1乃至4の何れか1項に記載のトルクセンサ。
【請求項6】
請求項1乃至5の何れか1項に記載のトルクセンサを備え、ステアリングホイールを操舵することによって発生した操舵トルクを前記トルクセンサが検出することを特徴とする電動パワーステアリング装置。
【請求項1】
同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、
導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、
前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、
前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、
前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、
前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、
前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、
前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、
窓幅比R1(%)=a1/θ1とし、
歯幅比R2(%)=a2/θ1とし、
窓・歯の平均値V(%)=(窓幅比R1+歯幅比R2)÷2 とすると、
31.7%≦ 窓・歯の平均値V ≦35.0%の範囲となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを、所定値に設定したことを特徴とするトルクセンサ。
【請求項2】
窓・歯の平均値V = 33.3%となるように、前記円筒部材の全ての前記窓の前記窓幅と、前記被包囲部の全ての前記歯部の歯幅とを、所定値に設定したことを特徴とする請求項1記載のトルクセンサ。
【請求項3】
前記円筒部材に、前記被包囲部の前記歯部よりも周方向幅の広い前記窓を形成したことを特徴とする請求項1又は2記載のトルクセンサ。
【請求項4】
同軸に配設された第1及び第2の回転軸をトーションバーを介して連結するとともに、
導電性で且つ非磁性の材料からなる円筒部材を、前記第1の回転軸の外周面を包囲するように、前記第2の回転軸と回転方向に一体とし、前記第1の回転軸の少なくとも前記円筒部材に包囲された被包囲部を磁性材料で形成し、
前記円筒部材の周方向に、所定間隔をあけて複数の窓を形成し、
前記被包囲部の周方向に、複数の歯部及び溝を交互に形成し、
前記円筒部材の前記窓が形成された部分を包囲するようにコイルを配設し、
前記コイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたトルクセンサにおいて、
前記円筒部材の周面を周方向にN等分した角度を一周期角度θ1とすると、前記窓は、前記一周期角度θ1の一方の端からa1度の角度の窓幅で開口し、残りのb1度の角度(b1=θ1−a1)の部分が塞がっており、
前記被包囲部の面を周方向にN等分した角度を一周期角度θ1とすると、前記一周期角度θ1の一方の端からa2度の角度で前記歯部が形成され、残りのb2度の角度(b2=θ1−a2)に前記溝が形成されており、
前記円筒部材の全ての前記窓を、窓幅a1:窓以外の部分b1=1:2となるように形成し、
前記被包囲部の全ての前記歯部を、歯幅a2:溝幅b2=1:2となるように形成したことを特徴とするトルクセンサ。
【請求項5】
前記円筒部材の前記窓が形成された部分を包囲する少なくとも2対のコイルを配設し、これら2対のコイルのインピーダンス変化に基づいて前記第1及び第2の回転軸に発生するトルクを検出するようにしたことを特徴とする請求項1乃至4の何れか1項に記載のトルクセンサ。
【請求項6】
請求項1乃至5の何れか1項に記載のトルクセンサを備え、ステアリングホイールを操舵することによって発生した操舵トルクを前記トルクセンサが検出することを特徴とする電動パワーステアリング装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−83531(P2013−83531A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223128(P2011−223128)
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]