
トルク伝達装置
【課題】 歯付きベルトとプーリからなるトルク伝達装置において、ベルト面の浮き上がり量の検出によって直接的に歯飛びを特定する歯飛び検出機構を実現する。
【解決手段】
本発明は、歯付きベルトとプーリで駆動するトルク伝達装置において、所定のトルクを超えた際に生じる歯飛び現象について、歯飛び時に生じるベルトの浮きをプーリの回転軸との相対位置が負荷によってズレないマイクロスイッチ等を用いて検出するベルト歯飛び検出機構を有することを特徴とする。
【解決手段】
本発明は、歯付きベルトとプーリで駆動するトルク伝達装置において、所定のトルクを超えた際に生じる歯飛び現象について、歯飛び時に生じるベルトの浮きをプーリの回転軸との相対位置が負荷によってズレないマイクロスイッチ等を用いて検出するベルト歯飛び検出機構を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歯付きベルトとプーリで構成されるトルク伝達システムにおいて、ベルト面の浮き上がり量の検出によって直接的に歯飛びを特定する検出技術に関する。
【背景技術】
【0002】
従来、歯付きベルトとプーリで構成されるトルク伝達システムは、ロボットや物品搬送システムなどの分野に広く適用されている。
【0003】
上記ベルト駆動型のトルク伝達機構において、通常のトルク負荷では歯飛びを生じない設計を行っているが、異常時の負荷によっては、通常のトルクを逸脱した大きなトルクが発生する場合がある。このような可能性のあるシステムにおいては、必要以上のベルト駆動トルク伝達機構の強度設計とするか、また許容トルクを超えた場合に、トルクリミッタなどによってトルクをカットする仕組みを別途設けるなどの設計手法が採られてきた。しかし、これらの設計手法は、コスト、および小型・軽量化において問題を抱える。
【0004】
一方、歯付きベルトとプーリからなるトルク伝達装置においては、ベルトの歯飛びを不可避なものとして、センサによりプーリの回転速度と駆動源の回転速度を比較する手法でベルトのスベリを検出する方法が提案されている(例えば、特許文献1、2を参照)。
【0005】
例えば、特許文献1は、従動プーリの円周突起の通過を近接スイッチで検出して予め定めた量と異なるとき、歯飛びとして駆動プーリを駆動するモータの停止を行う制御装置を提案している。また、特許文献2による歯飛び検出機構は、モータのエンコーダクロックと歯付きタイミングベルトの所定の走行量毎に位置信号クロックとを比較し、両者の差が所定範囲外であれば歯飛びが発生していると判断するものである。
【0006】
しかしながら、特許文献1は、プーリに設けた突起や穴をプーリの回転にともない、センサで検出するする方式であるが、モータに指令した所望の回転状態との比較処理が必ず必要とされ、さらに、モータ側ではない従うプーリ側にセンサを設けるため、モータの駆動回路とベルト歯飛び検出部位の一体配置が困難であり、小型化に難点がある。
【0007】
また、特許文献2においても、同様に比較処理が必要とされ、比較の結果の両者の差が歯飛びで生じたものではない場合も歯飛びとして検出されてしまう問題がある。
【0008】
つまり、いずれの技術においても、マイコン等の比較処理を行う機器が必要となるとともに、回転速度に差異を生じた原因が、駆動源自体の問題なのか、歯飛びが原因なのかが容易に判別できないという問題を抱えている。
【特許文献1】特開2003−184967号公報
【特許文献2】特開平8−290863号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
上記してきた問題を解決するため、本発明では、歯付きベルトとプーリで駆動するトルク伝達機構において、所定のトルクを超えた際に生じる歯飛び現象を、歯飛び時に生じるベルトの浮きを、プーリの回転軸との相対位置が負荷によってズレない検出センサで検出するベルト歯飛び検出機構を備えたトルク伝達装置を提供する。
【課題を解決するための手段】
【0010】
第一の発明は、歯付きベルトとプーリからなるトルク伝達装置であって、前記プーリと接触する前記歯付きベルトの外周部に、前記歯付きベルトの歯飛び時の浮き上がり量を検出する検出センサが取付けられた歯飛び検出機構部と、前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御する制御部と、を有することを特徴とするトルク伝達装置に関する。
【0011】
すなわち、第一の発明によれば、トルク伝達装置は、歯飛び検出機構部が、プーリと接触する円弧上に位置する歯付きベルトの外周部に取り付けた、ベルトの浮き上がり量を検出するマイクロスイッチなどの検出センサによって歯飛びを検出し、制御部が、検出センサの出力信号を受けてベルト駆動するアクチュエータの動作を制御する構成とすることによって、歯飛びに対する有効な処置を実行することができる。
【0012】
歯付きベルト駆動のシステムにおいて、必要以上の負荷トルクが懸かった場合にシステムに破損等に対し、ベルトが歯飛びを起こすことでそのトルクが伝達されず不具合を最小限に抑えることが可能となる。一方、歯付きベルトがプーリから歯飛びを生じる際のベルトの浮き上がり量は、ベルトのテンションや噛み合わせ歯数や歯のサイズ形状によりの条件が同一の場合、ベルトを介して伝わる負荷トルクの大きさと関連し、負荷トルクが大きいほど浮き上がり量も増大する。即ち、マイクロスイッチやポテンショや距離センサ等でこの浮き上がり量を検出可能にすることで、歯付きベルト駆動のシステムにおいて負荷のトルクの大きさを判定する機能を持たせることが可能となる。
【0013】
第二の発明は、前記歯飛び検出機構の検出センサは、前記プーリの回転軸を基準として前記歯付きベルト側の外周部との距離が一定に保持される枠体に取り付けたことを特徴とする上記第一の発明に記載のトルク伝達装置に関する。
【0014】
すなわち、第二の発明によれば、歯飛び検出機構において、プーリの回転軸から相対的に安定した距離を維持可能な、例えば、モータやプーリ回転軸を基準とした枠体に検出センサを設けることによって、機構の変形による検出センサの誤動作を防ぐことができる。
【0015】
第三の発明は、前記検出センサは、前記歯付きベルトの浮き上がり量を検出して予め設定された閾値で動作するマイクロスイッチを含む検出スイッチであることを特徴とする上記第一または第二の発明に記載のトルク伝達装置に関する。
【0016】
すなわち、第三の発明によれば、検出センサとして、例えば、マイクロスイッチの適用によって、押しボタン部の引き込み位置を予め設定し歯飛びの閾値とすることで、歯飛びのレベルを調整することができ、かつ安価な歯飛び検出機構が実現できる。
【0017】
第四の発明は、前記検出センサは、前記歯付きベルトの浮き上がり量をトルク負荷の大きさとして多段階に処理するトルクセンサであることを特徴とする上記第一または第二の発明に記載のトルク伝達装置に関する。
【0018】
すなわち、第四の発明によれば、歯付きベルトの浮き上がり量を距離センサやリニアポテンショメータ等で多段階に検知することによって、浮き上がり量をトルク負荷の大きさとして処理することが可能となる。
【0019】
一般に、歯付きベルトの浮き上がり量は、ベルトのテンションや噛み合わせ歯数や歯のサイズ形状によりの条件が同一の場合、ベルトを介して伝わる負荷トルクの大きさと関連し、負荷トルクが大きいほど浮き上がり量も増大する。例えば、マイクロスイッチ等の検出スイッチによるON/OFFの2値の出力でなく、ポテンショメータや距離センサ等で、この浮き上がり量を多段階に検出可能にすることで、歯付きベルト駆動のシステムにおいて負荷のトルクの大きさをきめ細かく制御することが可能となる。
【0020】
第五の発明は、歯付きベルトとプーリからなるトルク伝達装置における歯飛び制御方法であって、前記プーリと接触する前記歯付きベルトの外周部に取付けられた検出センサによって、前記歯付きベルトの歯飛び時の浮き上がり量を検出するステップと、前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御するステップと、を有することを特徴とする歯飛び制御方法に関する。
【0021】
すなわち、第五の発明は、トルク伝達装置における歯飛び検出の方法を提供するもので、歯飛び検出機構部が、プーリと接触する円弧上に位置する歯付きベルトの外周部に取り付けた、ベルトの浮き上がり量を検出するマイクロスイッチなどの検出センサによって歯飛びを検出し、制御部が、検出センサの出力信号を受けてベルト駆動するアクチュエータの動作を制御する構成とすることによって、歯飛びに対する有効な処置を実行することが可能となる。
【発明の効果】
【0022】
本発明の歯飛び検出機構を備えたトルク伝達装置によれば、以下の効果が生まれる。
(1)機構が簡素でセンサ素子も単純なマイクロスイッチなどを使用できるため、安価かつ小型の装置が実現できる。
(2)ベルトのテンション調整で許容負荷トルクも調整するとした場合、ベルトの歯飛びを直接検出する方式のため、許容負荷トルクを超えたことを検出するセンサとなる。
(3)ベルト歯飛びを検出したらモータのサーボを切る等の制御をすることで、ベルトの損傷、モータの損傷、その他負荷による部品の破損を抑制できる。
【0023】
さらに、アクチュエータに機械的に直結したプーリで歯飛びを検出できるのでモジュール化が容易となる。
【発明を実施するための最良の形態】
【0024】
以下、図面にもとづいて本発明の実施形態を説明する。
【0025】
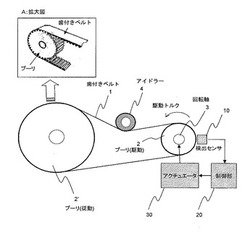
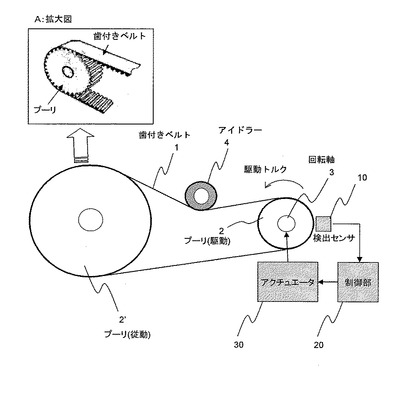
図1は、本発明の実施の形態になるトルク伝達システムの一基本構成を示す。トルク伝達システムは、モータ等のアクチュエータ30によって回転軸3が駆動されるプーリ(例えば、駆動プーリ)2、プーリ(例えば、従動プーリ)2’、ベルト懸けしてプーリ間でトルクを伝達する歯付きベルト1、およびベルトのテンションを調整するアイドラー4から構成されている。なお、プーリ2、2’は、共に歯付きでその歯数および歯サイズを歯付きベルト1の歯の条件と同一であり、Aの拡大図は、歯付きベルト1とプーリ2(またはプーリ2’)との噛み合いの状態を示している。
【0026】
また、上記のトルク伝達システムにおける歯飛び検出機構部は、プーリ2と接触し円弧上に位置する歯付きベルト1の外周部に取り付けられ、歯飛び時に歯付きベルト1の浮き上がり量を検出する検出センサ10と、検出センサ10の出力信号を受けて歯付きベルト1に連結するサーボモータなどのアクチュエータ30の動作を制御する制御部20とから構成されている。
【0027】
さらに、検出センサ10には、ボタン部が押し込まれることによってベルト面の位置を検出するマイクロスイッチ、ポテンショメータ、距離センサなどが適用される。
【0028】
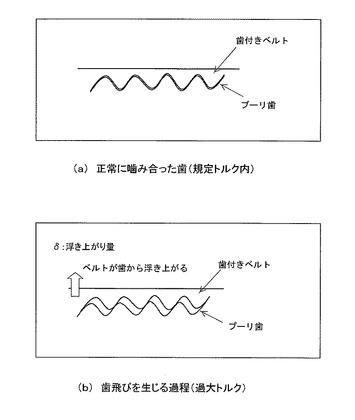
図2は、ベルト−プーリ間の歯飛び現象を模式的に表した図である。(a)は、ベルトとプーリが規定トルク内で正常に噛み合って動作している状態を示しており、また、(b)は、過大トルクにより歯飛びを生じる過程を示している。
【0029】
このベルト面の浮き上がり量(δ)は、ベルトのテンションや噛み合わせ歯数や歯のサイズ形状などの条件が同一である場合、ベルトを介して伝わる負荷トルクの大きさと関連し、負荷トルクが大きいほど浮き上がり量も増大する。そこで、マイクロスイッチ、ポテンショメータ、距離センサ等の検出センサを用いて浮き上がり量を検出可能にすることによって、歯付きベルト駆動のシステムに負荷のトルクの大きさを判定する機能を持たせることができる。
【0030】
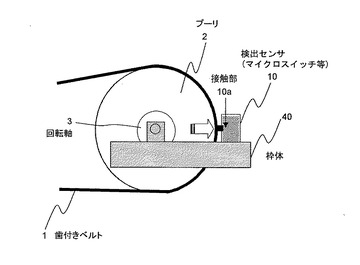
図3は、本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その1)を示す。本実施例は、トルク伝達装置におけるベルトの歯飛び検出機構部の取り付け構成を示しており、歯飛び時に生じるベルトの浮き上がり量の検出が、プーリの回転軸との相対位置が負荷によってズレを生じない検出センサの取付構造の例について示している。
【0031】
負荷トルクによるベルト浮き上がり量は、微小であるため安定な検出をするには、機構の変形による誤動作を防ぐように配置しなければならない。歯飛び検出機構の変形による検出センサ10の誤動作を防ぐよう、プーリ2の回転軸3から相対的に安定した距離を維持可能な、例えば、モータや、プーリ2(または従動プーリ2’)の回転軸4を基準とした枠体40に検出センサ10を設けた歯飛び検出機構とすることで、機構の変形やプーリ2の位置ズレ、倒れが生じても安定に歯飛びを検出できることとなる。図の接触部10aは、マイクロスイッチを想定した場合の例で、押しボタン等に相当する。
【0032】
一般に、噛み合わせの歯数の少ない小さいプーリ側で歯飛びは発生する。また、噛み合わせの歯数が同一の場合でも、ベルトの浮きをメカリミットなどで抑制すると、他のプーリで歯飛びが生じる。したがって、どのプーリで最初に飛びが生じるのかを知った上で、そのプーリのみに歯飛び検出機構を装備したトルク伝達システムにより検出センサの個数が削減できる。
【0033】
また、検出センサ10として、距離センサやリニアポテンショメータ等の位置を多段階で捉えるセンサを適用すれば、ベルトの浮き上がり量をトルク負荷の大きさとして多レベルによるトルク制御処理を行うことができる。
【0034】
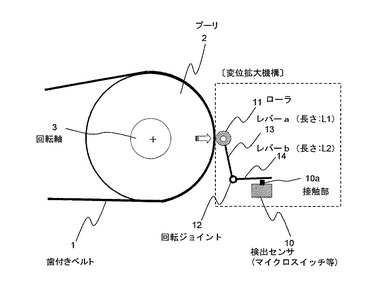
図4は、本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その2)を示す。本実施例は、検出センサ10として、マイクロスイッチを適用した場合の一変形例である。ベルトの浮き上がり量を梃子の原理で拡大させ、微小変位であるベルトの浮き上がりの検出を容易した歯飛び検出機構の例を示している。
【0035】
歯飛び検出機構におけるベルト面の変位拡大機構は、接触部(押しボタン)10aを備えたマイクロスイッチ10、回転ジョイント12を支点に結合する、ベルト面と接触部10aを形成するローラ11を端部に備える第一のレバー(長さ: L1 )と接触部10aを
加圧する第二のレバー(長さ: L2)から構成され、L1 >L2とすることによって変位
の拡大が実現される。これにより検出センサとして適用できるスイッチの選定範囲が拡大することとなる。
【0036】
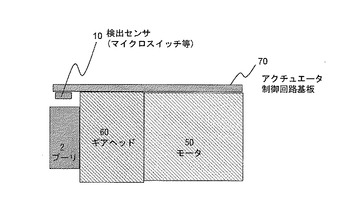
図5は、本発明の実施の形態になるトルク伝達装置におけるアクチュエータモジュールの構成例を示す。本実施例では、ベルトの歯飛び検出機能を備えたアクチュエータモジュールを提供する。アクチュエータモジュールは、モータ50、モータ50の回転を減速するギアヘッド60、プーリ2、モータの制御、ベルトの歯飛び検出、及び異常処理を行うアクチュエータ制御回路基板70、およびマイクロスイッチに代表される検出センサ10から構成されている。こうしたモジュール化により、ロボットの関節等でのユニット化が容易となり、配線処理においても簡素化が図れる。
【0037】
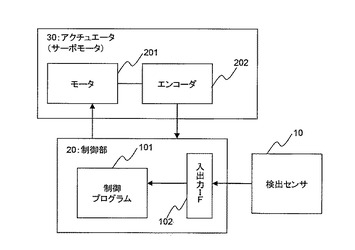
図6は、本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の構成例を示す。アクチュエータの制御システムは、検出センサ10、入出力インタフェース102と制御プログラム101(ROM:Read Only Memoryに内蔵)を備える制御部20、およびモータ201とモータ201の回転角度を検出してフィードバック信号を生成するエンコーダ202を備えるアクチュエータ30( サーボモータ) によって構成される。
【0038】
歯飛び時に、検出センサ10で検出した歯付きベルト面の変位に応じた出力信号を入出力インタフェース102を介して受け取り、制御部20において、制御プログラム101が、検出センサ10による検出結果からトルクの負荷に応じてベルトに連結したアクチュエータ30のモータ201の制御を行う。
【0039】
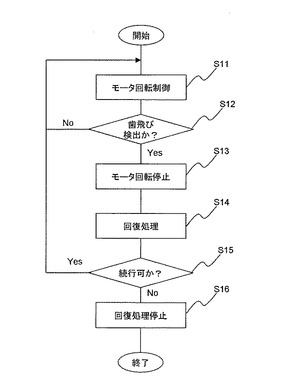
図7は、本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の処理フローを示す。まず、ステップS11において、モータ回転の制御を行い、エンコーダ202からの出力信号を監視し、ステップS12において、検出センサ10からの出力信号から歯飛び検出の状態を判断する。ここでは、ベルトの浮き上がり量(δ)が、過負荷の限界に相当する変位となる閾値(A)を超えたか否かによって判断する。
【0040】
その結果、歯飛びはなく、モータからの駆動トルクが規定のトルクの範囲内であれば、ステップS11に戻り、過大トルクの状態にあり、歯飛び検出された場合には、ステップS13において、一旦モータ回転を停止させ、ステップS14で、駆動トルクの設定値を変更する回復処理を行う。そして、ステップS15において、変更をかけた回復処理による続行が可能か否かを判断し、可能であれば、ステップS11移行のモータ回転の制御処理を行う。続行が不能であれば、ステップS16において、回復処理を停止する。
【0041】
上記のように、検出センサ10による検出結果からトルクの負荷に応じてベルトに連結したアクチュエータの制御方法を変更可能にしたトルク伝達装置が実現される。これにより、例えば、過負荷が懸かった時にサーボを切る等の制御で機構やベルトの損傷を防ぐことが可能となる。
【0042】
以上述べてきた本発明の実施の態様は、以下の付記に示す通りである。
(付記1) 歯付きベルトとプーリからなるトルク伝達装置であって、
前記プーリと接触する前記歯付きベルトの外周部に、前記歯付きベルトの歯飛び時の浮き上がり量を検出する検出センサが取付けられた歯飛び検出機構部と、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御する制御部と、
を有することを特徴とするトルク伝達装置。
(付記2) 前記歯飛び検出機構の検出センサは、前記プーリの回転軸を基準として前記歯付きベルト側の外周部との距離が一定に保持される枠体に取り付けたことを特徴とする付記1に記載のトルク伝達装置。
(付記3) 前記検出センサは、前記歯付きベルトの浮き上がり量を検出して予め設定された閾値で動作するマイクロスイッチを含む検出スイッチであることを特徴とする付記1または2に記載のトルク伝達装置。
(付記4) 前記検出センサは、前記歯付きベルトの浮き上がり量をトルク負荷の大きさとして多段階に処理するトルクセンサであることを特徴とする付記1または2に記載のトルク伝達装置。
(付記5) 前記検出センサ、前記アクチュエータ、およびアクチュエータの制御回路をアクチュエータモジュールとして一体化させたことを特徴とする付記3または4に記載のトルク伝達装置。
(付記6) 前記マイクロスイッチの押しボタン部を加圧するアーム部は、前記歯付きベルトの外周部に接触するローラを支持する第一のレバーと、前記押しボタン部に接触する第二のレバーと、前記第一及び第二のレバーを結合する回転ジョイントとから構成され、前記第一のレバーの長さを前記第二のレバーの長さより大きくすることを特徴とする付記3に記載のトルク伝達装置。
(付記7) 歯付きベルトとプーリからなるトルク伝達装置における歯飛び制御方法であって、
前記プーリと接触する前記歯付きベルトの外周部に取付けられた検出センサによって、前記歯付きベルトの歯飛び時の浮き上がり量を検出するステップと、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御するステップと、
を有することを特徴とする歯飛び制御方法。
【図面の簡単な説明】
【0043】
【図1】本発明を適用するトルク伝達システムの基本構成を示す図である。
【図2】ベルト−プーリ間の歯飛び現象を模式的に表した図である。
【図3】本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その1)を示す図である。
【図4】本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その2)を示す図である。
【図5】本発明の実施の形態になるトルク伝達装置におけるアクチュエータモジュールの構成例を示す図である。
【図6】本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の構成例を示す図である。
【図7】本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の処理フローを示す図である。
【符号の説明】
【0044】
1 歯付きベルト
2、2’ プーリ
3 回転軸
4 アイドラー
10 検出センサ(マイクロスイッチ等)
10a 接触部
11 ローラ
12 回転ジョイント
13 レバーa
14 レバーb
20 制御部
30 アクチュエータ(サーボモータ)
40 枠体
50 モータ
60 ギアヘッド
70 アクチュエータ制御回路基板
101 制御プログラム
102 入出力IF(インタフェース)
201 モータ
202 エンコーダ
【技術分野】
【0001】
本発明は、歯付きベルトとプーリで構成されるトルク伝達システムにおいて、ベルト面の浮き上がり量の検出によって直接的に歯飛びを特定する検出技術に関する。
【背景技術】
【0002】
従来、歯付きベルトとプーリで構成されるトルク伝達システムは、ロボットや物品搬送システムなどの分野に広く適用されている。
【0003】
上記ベルト駆動型のトルク伝達機構において、通常のトルク負荷では歯飛びを生じない設計を行っているが、異常時の負荷によっては、通常のトルクを逸脱した大きなトルクが発生する場合がある。このような可能性のあるシステムにおいては、必要以上のベルト駆動トルク伝達機構の強度設計とするか、また許容トルクを超えた場合に、トルクリミッタなどによってトルクをカットする仕組みを別途設けるなどの設計手法が採られてきた。しかし、これらの設計手法は、コスト、および小型・軽量化において問題を抱える。
【0004】
一方、歯付きベルトとプーリからなるトルク伝達装置においては、ベルトの歯飛びを不可避なものとして、センサによりプーリの回転速度と駆動源の回転速度を比較する手法でベルトのスベリを検出する方法が提案されている(例えば、特許文献1、2を参照)。
【0005】
例えば、特許文献1は、従動プーリの円周突起の通過を近接スイッチで検出して予め定めた量と異なるとき、歯飛びとして駆動プーリを駆動するモータの停止を行う制御装置を提案している。また、特許文献2による歯飛び検出機構は、モータのエンコーダクロックと歯付きタイミングベルトの所定の走行量毎に位置信号クロックとを比較し、両者の差が所定範囲外であれば歯飛びが発生していると判断するものである。
【0006】
しかしながら、特許文献1は、プーリに設けた突起や穴をプーリの回転にともない、センサで検出するする方式であるが、モータに指令した所望の回転状態との比較処理が必ず必要とされ、さらに、モータ側ではない従うプーリ側にセンサを設けるため、モータの駆動回路とベルト歯飛び検出部位の一体配置が困難であり、小型化に難点がある。
【0007】
また、特許文献2においても、同様に比較処理が必要とされ、比較の結果の両者の差が歯飛びで生じたものではない場合も歯飛びとして検出されてしまう問題がある。
【0008】
つまり、いずれの技術においても、マイコン等の比較処理を行う機器が必要となるとともに、回転速度に差異を生じた原因が、駆動源自体の問題なのか、歯飛びが原因なのかが容易に判別できないという問題を抱えている。
【特許文献1】特開2003−184967号公報
【特許文献2】特開平8−290863号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
上記してきた問題を解決するため、本発明では、歯付きベルトとプーリで駆動するトルク伝達機構において、所定のトルクを超えた際に生じる歯飛び現象を、歯飛び時に生じるベルトの浮きを、プーリの回転軸との相対位置が負荷によってズレない検出センサで検出するベルト歯飛び検出機構を備えたトルク伝達装置を提供する。
【課題を解決するための手段】
【0010】
第一の発明は、歯付きベルトとプーリからなるトルク伝達装置であって、前記プーリと接触する前記歯付きベルトの外周部に、前記歯付きベルトの歯飛び時の浮き上がり量を検出する検出センサが取付けられた歯飛び検出機構部と、前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御する制御部と、を有することを特徴とするトルク伝達装置に関する。
【0011】
すなわち、第一の発明によれば、トルク伝達装置は、歯飛び検出機構部が、プーリと接触する円弧上に位置する歯付きベルトの外周部に取り付けた、ベルトの浮き上がり量を検出するマイクロスイッチなどの検出センサによって歯飛びを検出し、制御部が、検出センサの出力信号を受けてベルト駆動するアクチュエータの動作を制御する構成とすることによって、歯飛びに対する有効な処置を実行することができる。
【0012】
歯付きベルト駆動のシステムにおいて、必要以上の負荷トルクが懸かった場合にシステムに破損等に対し、ベルトが歯飛びを起こすことでそのトルクが伝達されず不具合を最小限に抑えることが可能となる。一方、歯付きベルトがプーリから歯飛びを生じる際のベルトの浮き上がり量は、ベルトのテンションや噛み合わせ歯数や歯のサイズ形状によりの条件が同一の場合、ベルトを介して伝わる負荷トルクの大きさと関連し、負荷トルクが大きいほど浮き上がり量も増大する。即ち、マイクロスイッチやポテンショや距離センサ等でこの浮き上がり量を検出可能にすることで、歯付きベルト駆動のシステムにおいて負荷のトルクの大きさを判定する機能を持たせることが可能となる。
【0013】
第二の発明は、前記歯飛び検出機構の検出センサは、前記プーリの回転軸を基準として前記歯付きベルト側の外周部との距離が一定に保持される枠体に取り付けたことを特徴とする上記第一の発明に記載のトルク伝達装置に関する。
【0014】
すなわち、第二の発明によれば、歯飛び検出機構において、プーリの回転軸から相対的に安定した距離を維持可能な、例えば、モータやプーリ回転軸を基準とした枠体に検出センサを設けることによって、機構の変形による検出センサの誤動作を防ぐことができる。
【0015】
第三の発明は、前記検出センサは、前記歯付きベルトの浮き上がり量を検出して予め設定された閾値で動作するマイクロスイッチを含む検出スイッチであることを特徴とする上記第一または第二の発明に記載のトルク伝達装置に関する。
【0016】
すなわち、第三の発明によれば、検出センサとして、例えば、マイクロスイッチの適用によって、押しボタン部の引き込み位置を予め設定し歯飛びの閾値とすることで、歯飛びのレベルを調整することができ、かつ安価な歯飛び検出機構が実現できる。
【0017】
第四の発明は、前記検出センサは、前記歯付きベルトの浮き上がり量をトルク負荷の大きさとして多段階に処理するトルクセンサであることを特徴とする上記第一または第二の発明に記載のトルク伝達装置に関する。
【0018】
すなわち、第四の発明によれば、歯付きベルトの浮き上がり量を距離センサやリニアポテンショメータ等で多段階に検知することによって、浮き上がり量をトルク負荷の大きさとして処理することが可能となる。
【0019】
一般に、歯付きベルトの浮き上がり量は、ベルトのテンションや噛み合わせ歯数や歯のサイズ形状によりの条件が同一の場合、ベルトを介して伝わる負荷トルクの大きさと関連し、負荷トルクが大きいほど浮き上がり量も増大する。例えば、マイクロスイッチ等の検出スイッチによるON/OFFの2値の出力でなく、ポテンショメータや距離センサ等で、この浮き上がり量を多段階に検出可能にすることで、歯付きベルト駆動のシステムにおいて負荷のトルクの大きさをきめ細かく制御することが可能となる。
【0020】
第五の発明は、歯付きベルトとプーリからなるトルク伝達装置における歯飛び制御方法であって、前記プーリと接触する前記歯付きベルトの外周部に取付けられた検出センサによって、前記歯付きベルトの歯飛び時の浮き上がり量を検出するステップと、前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御するステップと、を有することを特徴とする歯飛び制御方法に関する。
【0021】
すなわち、第五の発明は、トルク伝達装置における歯飛び検出の方法を提供するもので、歯飛び検出機構部が、プーリと接触する円弧上に位置する歯付きベルトの外周部に取り付けた、ベルトの浮き上がり量を検出するマイクロスイッチなどの検出センサによって歯飛びを検出し、制御部が、検出センサの出力信号を受けてベルト駆動するアクチュエータの動作を制御する構成とすることによって、歯飛びに対する有効な処置を実行することが可能となる。
【発明の効果】
【0022】
本発明の歯飛び検出機構を備えたトルク伝達装置によれば、以下の効果が生まれる。
(1)機構が簡素でセンサ素子も単純なマイクロスイッチなどを使用できるため、安価かつ小型の装置が実現できる。
(2)ベルトのテンション調整で許容負荷トルクも調整するとした場合、ベルトの歯飛びを直接検出する方式のため、許容負荷トルクを超えたことを検出するセンサとなる。
(3)ベルト歯飛びを検出したらモータのサーボを切る等の制御をすることで、ベルトの損傷、モータの損傷、その他負荷による部品の破損を抑制できる。
【0023】
さらに、アクチュエータに機械的に直結したプーリで歯飛びを検出できるのでモジュール化が容易となる。
【発明を実施するための最良の形態】
【0024】
以下、図面にもとづいて本発明の実施形態を説明する。
【0025】
図1は、本発明の実施の形態になるトルク伝達システムの一基本構成を示す。トルク伝達システムは、モータ等のアクチュエータ30によって回転軸3が駆動されるプーリ(例えば、駆動プーリ)2、プーリ(例えば、従動プーリ)2’、ベルト懸けしてプーリ間でトルクを伝達する歯付きベルト1、およびベルトのテンションを調整するアイドラー4から構成されている。なお、プーリ2、2’は、共に歯付きでその歯数および歯サイズを歯付きベルト1の歯の条件と同一であり、Aの拡大図は、歯付きベルト1とプーリ2(またはプーリ2’)との噛み合いの状態を示している。
【0026】
また、上記のトルク伝達システムにおける歯飛び検出機構部は、プーリ2と接触し円弧上に位置する歯付きベルト1の外周部に取り付けられ、歯飛び時に歯付きベルト1の浮き上がり量を検出する検出センサ10と、検出センサ10の出力信号を受けて歯付きベルト1に連結するサーボモータなどのアクチュエータ30の動作を制御する制御部20とから構成されている。
【0027】
さらに、検出センサ10には、ボタン部が押し込まれることによってベルト面の位置を検出するマイクロスイッチ、ポテンショメータ、距離センサなどが適用される。
【0028】
図2は、ベルト−プーリ間の歯飛び現象を模式的に表した図である。(a)は、ベルトとプーリが規定トルク内で正常に噛み合って動作している状態を示しており、また、(b)は、過大トルクにより歯飛びを生じる過程を示している。
【0029】
このベルト面の浮き上がり量(δ)は、ベルトのテンションや噛み合わせ歯数や歯のサイズ形状などの条件が同一である場合、ベルトを介して伝わる負荷トルクの大きさと関連し、負荷トルクが大きいほど浮き上がり量も増大する。そこで、マイクロスイッチ、ポテンショメータ、距離センサ等の検出センサを用いて浮き上がり量を検出可能にすることによって、歯付きベルト駆動のシステムに負荷のトルクの大きさを判定する機能を持たせることができる。
【0030】
図3は、本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その1)を示す。本実施例は、トルク伝達装置におけるベルトの歯飛び検出機構部の取り付け構成を示しており、歯飛び時に生じるベルトの浮き上がり量の検出が、プーリの回転軸との相対位置が負荷によってズレを生じない検出センサの取付構造の例について示している。
【0031】
負荷トルクによるベルト浮き上がり量は、微小であるため安定な検出をするには、機構の変形による誤動作を防ぐように配置しなければならない。歯飛び検出機構の変形による検出センサ10の誤動作を防ぐよう、プーリ2の回転軸3から相対的に安定した距離を維持可能な、例えば、モータや、プーリ2(または従動プーリ2’)の回転軸4を基準とした枠体40に検出センサ10を設けた歯飛び検出機構とすることで、機構の変形やプーリ2の位置ズレ、倒れが生じても安定に歯飛びを検出できることとなる。図の接触部10aは、マイクロスイッチを想定した場合の例で、押しボタン等に相当する。
【0032】
一般に、噛み合わせの歯数の少ない小さいプーリ側で歯飛びは発生する。また、噛み合わせの歯数が同一の場合でも、ベルトの浮きをメカリミットなどで抑制すると、他のプーリで歯飛びが生じる。したがって、どのプーリで最初に飛びが生じるのかを知った上で、そのプーリのみに歯飛び検出機構を装備したトルク伝達システムにより検出センサの個数が削減できる。
【0033】
また、検出センサ10として、距離センサやリニアポテンショメータ等の位置を多段階で捉えるセンサを適用すれば、ベルトの浮き上がり量をトルク負荷の大きさとして多レベルによるトルク制御処理を行うことができる。
【0034】
図4は、本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その2)を示す。本実施例は、検出センサ10として、マイクロスイッチを適用した場合の一変形例である。ベルトの浮き上がり量を梃子の原理で拡大させ、微小変位であるベルトの浮き上がりの検出を容易した歯飛び検出機構の例を示している。
【0035】
歯飛び検出機構におけるベルト面の変位拡大機構は、接触部(押しボタン)10aを備えたマイクロスイッチ10、回転ジョイント12を支点に結合する、ベルト面と接触部10aを形成するローラ11を端部に備える第一のレバー(長さ: L1 )と接触部10aを
加圧する第二のレバー(長さ: L2)から構成され、L1 >L2とすることによって変位
の拡大が実現される。これにより検出センサとして適用できるスイッチの選定範囲が拡大することとなる。
【0036】
図5は、本発明の実施の形態になるトルク伝達装置におけるアクチュエータモジュールの構成例を示す。本実施例では、ベルトの歯飛び検出機能を備えたアクチュエータモジュールを提供する。アクチュエータモジュールは、モータ50、モータ50の回転を減速するギアヘッド60、プーリ2、モータの制御、ベルトの歯飛び検出、及び異常処理を行うアクチュエータ制御回路基板70、およびマイクロスイッチに代表される検出センサ10から構成されている。こうしたモジュール化により、ロボットの関節等でのユニット化が容易となり、配線処理においても簡素化が図れる。
【0037】
図6は、本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の構成例を示す。アクチュエータの制御システムは、検出センサ10、入出力インタフェース102と制御プログラム101(ROM:Read Only Memoryに内蔵)を備える制御部20、およびモータ201とモータ201の回転角度を検出してフィードバック信号を生成するエンコーダ202を備えるアクチュエータ30( サーボモータ) によって構成される。
【0038】
歯飛び時に、検出センサ10で検出した歯付きベルト面の変位に応じた出力信号を入出力インタフェース102を介して受け取り、制御部20において、制御プログラム101が、検出センサ10による検出結果からトルクの負荷に応じてベルトに連結したアクチュエータ30のモータ201の制御を行う。
【0039】
図7は、本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の処理フローを示す。まず、ステップS11において、モータ回転の制御を行い、エンコーダ202からの出力信号を監視し、ステップS12において、検出センサ10からの出力信号から歯飛び検出の状態を判断する。ここでは、ベルトの浮き上がり量(δ)が、過負荷の限界に相当する変位となる閾値(A)を超えたか否かによって判断する。
【0040】
その結果、歯飛びはなく、モータからの駆動トルクが規定のトルクの範囲内であれば、ステップS11に戻り、過大トルクの状態にあり、歯飛び検出された場合には、ステップS13において、一旦モータ回転を停止させ、ステップS14で、駆動トルクの設定値を変更する回復処理を行う。そして、ステップS15において、変更をかけた回復処理による続行が可能か否かを判断し、可能であれば、ステップS11移行のモータ回転の制御処理を行う。続行が不能であれば、ステップS16において、回復処理を停止する。
【0041】
上記のように、検出センサ10による検出結果からトルクの負荷に応じてベルトに連結したアクチュエータの制御方法を変更可能にしたトルク伝達装置が実現される。これにより、例えば、過負荷が懸かった時にサーボを切る等の制御で機構やベルトの損傷を防ぐことが可能となる。
【0042】
以上述べてきた本発明の実施の態様は、以下の付記に示す通りである。
(付記1) 歯付きベルトとプーリからなるトルク伝達装置であって、
前記プーリと接触する前記歯付きベルトの外周部に、前記歯付きベルトの歯飛び時の浮き上がり量を検出する検出センサが取付けられた歯飛び検出機構部と、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御する制御部と、
を有することを特徴とするトルク伝達装置。
(付記2) 前記歯飛び検出機構の検出センサは、前記プーリの回転軸を基準として前記歯付きベルト側の外周部との距離が一定に保持される枠体に取り付けたことを特徴とする付記1に記載のトルク伝達装置。
(付記3) 前記検出センサは、前記歯付きベルトの浮き上がり量を検出して予め設定された閾値で動作するマイクロスイッチを含む検出スイッチであることを特徴とする付記1または2に記載のトルク伝達装置。
(付記4) 前記検出センサは、前記歯付きベルトの浮き上がり量をトルク負荷の大きさとして多段階に処理するトルクセンサであることを特徴とする付記1または2に記載のトルク伝達装置。
(付記5) 前記検出センサ、前記アクチュエータ、およびアクチュエータの制御回路をアクチュエータモジュールとして一体化させたことを特徴とする付記3または4に記載のトルク伝達装置。
(付記6) 前記マイクロスイッチの押しボタン部を加圧するアーム部は、前記歯付きベルトの外周部に接触するローラを支持する第一のレバーと、前記押しボタン部に接触する第二のレバーと、前記第一及び第二のレバーを結合する回転ジョイントとから構成され、前記第一のレバーの長さを前記第二のレバーの長さより大きくすることを特徴とする付記3に記載のトルク伝達装置。
(付記7) 歯付きベルトとプーリからなるトルク伝達装置における歯飛び制御方法であって、
前記プーリと接触する前記歯付きベルトの外周部に取付けられた検出センサによって、前記歯付きベルトの歯飛び時の浮き上がり量を検出するステップと、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御するステップと、
を有することを特徴とする歯飛び制御方法。
【図面の簡単な説明】
【0043】
【図1】本発明を適用するトルク伝達システムの基本構成を示す図である。
【図2】ベルト−プーリ間の歯飛び現象を模式的に表した図である。
【図3】本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その1)を示す図である。
【図4】本発明の実施の形態になるトルク伝達装置におけるベルト歯飛び検出機構の構成例(その2)を示す図である。
【図5】本発明の実施の形態になるトルク伝達装置におけるアクチュエータモジュールの構成例を示す図である。
【図6】本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の構成例を示す図である。
【図7】本発明の実施の形態になるトルク伝達装置におけるアクチュエータ制御の処理フローを示す図である。
【符号の説明】
【0044】
1 歯付きベルト
2、2’ プーリ
3 回転軸
4 アイドラー
10 検出センサ(マイクロスイッチ等)
10a 接触部
11 ローラ
12 回転ジョイント
13 レバーa
14 レバーb
20 制御部
30 アクチュエータ(サーボモータ)
40 枠体
50 モータ
60 ギアヘッド
70 アクチュエータ制御回路基板
101 制御プログラム
102 入出力IF(インタフェース)
201 モータ
202 エンコーダ
【特許請求の範囲】
【請求項1】
歯付きベルトとプーリからなるトルク伝達装置であって、
前記プーリと接触する前記歯付きベルトの外周部に、前記歯付きベルトの歯飛び時の浮き上がり量を検出する検出センサが取付けられた歯飛び検出機構部と、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御する制御部と、
を有することを特徴とするトルク伝達装置。
【請求項2】
前記歯飛び検出機構の検出センサは、前記プーリの回転軸を基準として前記歯付きベルト側の外周部との距離が一定に保持される枠体に取り付けたことを特徴とする請求項1に記載のトルク伝達装置。
【請求項3】
前記検出センサは、前記歯付きベルトの浮き上がり量を検出して予め設定された閾値で動作するマイクロスイッチを含む検出スイッチであることを特徴とする請求項1または2に記載のトルク伝達装置。
【請求項4】
前記検出センサは、前記歯付きベルトの浮き上がり量をトルク負荷の大きさとして多段階に処理するトルクセンサであることを特徴とする請求項1または2に記載のトルク伝達装置。
【請求項5】
歯付きベルトとプーリからなるトルク伝達装置における歯飛び制御方法であって、
前記プーリと接触する前記歯付きベルトの外周部に取付けられた検出センサによって、前記歯付きベルトの歯飛び時の浮き上がり量を検出するステップと、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御するステップと、
を有することを特徴とする歯飛び制御方法。
【請求項1】
歯付きベルトとプーリからなるトルク伝達装置であって、
前記プーリと接触する前記歯付きベルトの外周部に、前記歯付きベルトの歯飛び時の浮き上がり量を検出する検出センサが取付けられた歯飛び検出機構部と、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御する制御部と、
を有することを特徴とするトルク伝達装置。
【請求項2】
前記歯飛び検出機構の検出センサは、前記プーリの回転軸を基準として前記歯付きベルト側の外周部との距離が一定に保持される枠体に取り付けたことを特徴とする請求項1に記載のトルク伝達装置。
【請求項3】
前記検出センサは、前記歯付きベルトの浮き上がり量を検出して予め設定された閾値で動作するマイクロスイッチを含む検出スイッチであることを特徴とする請求項1または2に記載のトルク伝達装置。
【請求項4】
前記検出センサは、前記歯付きベルトの浮き上がり量をトルク負荷の大きさとして多段階に処理するトルクセンサであることを特徴とする請求項1または2に記載のトルク伝達装置。
【請求項5】
歯付きベルトとプーリからなるトルク伝達装置における歯飛び制御方法であって、
前記プーリと接触する前記歯付きベルトの外周部に取付けられた検出センサによって、前記歯付きベルトの歯飛び時の浮き上がり量を検出するステップと、
前記検出センサの出力信号を受けてベルトに連結するアクチュエータの動作を制御するステップと、
を有することを特徴とする歯飛び制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−2664(P2008−2664A)
【公開日】平成20年1月10日(2008.1.10)
【国際特許分類】
【出願番号】特願2006−175553(P2006−175553)
【出願日】平成18年6月26日(2006.6.26)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成20年1月10日(2008.1.10)
【国際特許分類】
【出願日】平成18年6月26日(2006.6.26)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]