
トルク自動調整装置
【課題】トルク自動調整装置を提供する。
【解決手段】前記トルク自動調整装置は、動力入力設備と連結し、その作用力は動力入力設備から生じる第1の張力である駆動モジュールと、巻取材料と連結し、その作用力は巻取材料に与える第2の張力である受動モジュールと、前記駆動モジュールと受動モジュールとに連結し、前記第2の張力と前記第1の張力とが一致することを維持するように、前記第2の張力により前記駆動モジュールと受動モジュールとの距離を調整する調整モジュールと、を備える。本発明は巻取材料に与えられる張力の安定を実現でき、材料供給或いは回収の精密度を保証する。
【解決手段】前記トルク自動調整装置は、動力入力設備と連結し、その作用力は動力入力設備から生じる第1の張力である駆動モジュールと、巻取材料と連結し、その作用力は巻取材料に与える第2の張力である受動モジュールと、前記駆動モジュールと受動モジュールとに連結し、前記第2の張力と前記第1の張力とが一致することを維持するように、前記第2の張力により前記駆動モジュールと受動モジュールとの距離を調整する調整モジュールと、を備える。本発明は巻取材料に与えられる張力の安定を実現でき、材料供給或いは回収の精密度を保証する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、巻取式で材料の供給及び廃棄物の回収を行う装置、特にトルク自動調整装置に関する。
【背景技術】
【0002】
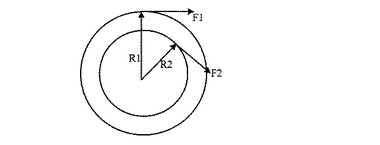
生産プロセスにおいて、巻取式で一部の原材料/補助材料を供給し、廃棄物を回収する。このような材料供給及び回収プロセスにおいて、駆動モータのトルクM(M=R×F)は一定になるように安定性が維持され、巻取材料の半径Rが材料の供給に従って変化するため、材料の張力Fはそれに応じて変化し、材料供給の精密度を影響する。
【0003】
図1は従来技術の巻取材料の供給或いは回収の張力の変化概略図である。作動当初の巻取式材料盤の半径R1は最大であり、この時張力F1は最小である。暫く使用した後、材料盤の半径R2は縮小し、トルクMが安定して一定とする場合、張力F2は増大する。
【0004】
従来の対応策としては、巻いた材料の側に夫々の半径に対応する3つの半径検出センサーを設置することである。例えば、第1のセンサーは半径R1に対応し、第2のセンサーは半径R2に対応し、第3のセンサーは半径R3に対応する。3つのセンサーが同時に触発される場合、モータの出力トルクM1がM1=R1×Fである。第2のセンサーと第3のセンサーが触発される場合、モータの出力トルクM2がM2=R2×Fである。第3のセンサーしか触発されない場合、モータの出力トルクM3がM2=R3×Fである。このように、材料の半径が変化した後(夫々R1、R2、R3)、トルクもそれに従って変化し(夫々M1、M2、M3)、それによってFの安定が維持される。
【発明の概要】
【発明が解決しようとする課題】
【0005】
この技術案の欠陥は、トルクの変化は跳躍性の変化であることである。即ちトルクM1と、トルクM2と、トルクM3との間の差異は大きく、緩和した漸進的変化が実現できない。また、巻いた材料の半径はR1とR2との間、又はR2とR3との間である場合、張力Fも半径の変化に従って変化し続け、それにより材料の供給或いは回収の精密度が欠如している。
【課題を解決するための手段】
【0006】
本発明はトルク自動調整装置を提供し、従来技術において巻取材料を供給或いは回収する時に装置の張力が不安定という問題を解決し、材料の供給或いは回収装置のトルクに対する自動的な調整を実現し、その張力を安定させ、材料の供給或いは回収の精密度を保証する。
【0007】
本発明の幾つかの実施例により以下の技術案を提供した。即ち、
トルク自動調整装置であって、
動力入力設備と連結し、動力入力設備から生じる第1の張力である作用力を有する駆動モジュールと、
巻取材料と連結し、巻取材料に与える第2の張力である作用力を有する受動モジュールと、
前記駆動モジュールと受動モジュールとに連結し、前記第2の張力と前記第1の張力とが一致することを維持するように、前記第2の張力に基づいて前記駆動モジュールと受動モジュールとの距離を調整する調整モジュールと、を備える。
【0008】
本発明は幾つかの実施例により、巻取材料の供給或いは回収装置のトルクを自動的に調整し、巻取材料の供給或いは回収装置の張力が終始一致することを保証し、それにより材料供給或いは回収の精密度を保証する。
【図面の簡単な説明】
【0009】
【図1】従来技術において巻取材料の供給或いは回収の張力変化の概略図
【図2】本発明にかかるトルク自動調整装置構造の概略図
【図3】本発明にかかるトルク自動調整装置の実施例1の構造概略図
【図4】本発明にかかるトルク自動調整装置の実施例2の構造概略図
【発明を実施するための形態】
【0010】
添付図と具体的な実施例により本発明の技術案を更に詳細に説明する。
【0011】
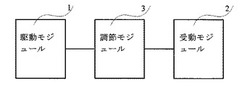
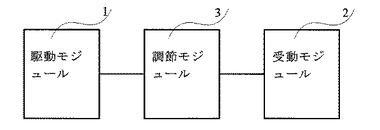
図2は本発明にかかるトルク自動調整装置構造の概略図である。図2に示すように、該トルク自動調整装置は、外部動力を導入し、第1の張力である作用力を有する駆動モジュール1と、巻取材料と連結し、巻取材料に作用される第2の張力を反映する受動モジュールと、駆動モジュール1とも受動モジュールとも連結し、第1の張力と第2の張力を受け、更に第1の張力と終始一致させるように、第2の張力を自動的に調整する調整モジュールと、を備える。
【0012】
本実施例により、巻取材料の供給或いは回収装置のトルクを自動的に調整でき、該巻取材料の供給或いは回収装置に作用する張力の安定を維持し、それにより材料の供給或いは回収の精密度を保証する。
【0013】
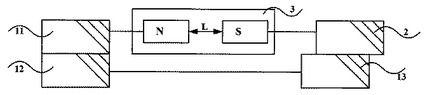
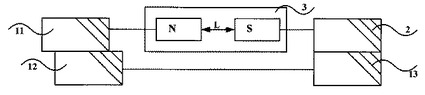
図3は発明にかかるトルク自動調整装置の実施例1の構造概略図である。図3に示すように、該トルク自動調整装置は、第1の駆動ネジ11と、第2の駆動ネジ12と第3の駆動ネジ13とからなる駆動モジュールと、受動モジュールとする受動ネジ2と、及び調整モジュールとする電磁トルク装置3と、を備える。第1の駆動ネジ11と、第2の駆動ネジ12と、第3の駆動ネジ13とは軸受により軸に固定され、受動ネジ2は軸において所定の範囲内で移動できる。第1の駆動ネジ11の左側はモータに連結し、材料の供給或いは回収装置の起動に用いられ、起動後、第1の駆動ネジ11の回転速度をn1とし、第1の駆動ネジ11は噛合いによって第2の駆動ネジ12を回転させ、第1の駆動ネジ11と第2の駆動ネジ12とはみな軸受により固定され、両者の位置は固定するため、第1の駆動ネジ11が第2の駆動ネジ12を回転させた後、第2の駆動ネジ12の回転速度は第1の駆動ネジ11の回転速度と一致し、同様にn1である。第3の駆動ネジ13と第2の駆動ネジ12との位置も相対的に固定するため(第2の駆動ネジ12と第3の駆動ネジ13が所在する軸を固定する、又は第2の駆動ネジ12と第3の駆動ネジ13を同じ軸に設置することができる)、第3の駆動ネジ13の回転速度は第2の駆動ネジ12の回転速度と一致し、同様にn1である。第3の駆動ネジ13と噛合った受動ネジ2の右側は巻取材料に連結し、受動ネジ2は軸に固定されず、所定の距離内前後移動でき、受動ネジ2の回転速度をn2とし。受動ネジ2の回転速度n2>第3の駆動ネジ13の回転速度n1の場合、受動ネジ2は右側に移動し(材料への方向)、受動ネジ2の回転速度n2<第3の駆動ネジ13の回転速度n1の場合、受動ネジ2は左側に移動し(材料から離れる方向)、受動ネジ2の回転速度n2=第3の駆動ネジ13の回転速度n1の場合、両者の速度が一致した後、第3の駆動ネジ13と受動ネジ2との相対的な位置は固定的となる。前記条件は、相互に噛合った第3の駆動ネジ13と受動ネジ2とのねじ山の間隔、及び方向を一致に設計することによって満足できる。
【0014】
電磁トルク3装置は電磁力によってトルクを転送し、即ち電磁トルク装置の一端が電磁N極であり、他端がS極であり、両極は間隔Lをもって対向する。「異なる極は互いに引き合う」という原理により、N極が回転する時、S極もそれに従って回転する。N極とS極との間の転送トルクMと、両者の間隔Lとは反比例で、間隔Lが大きければ大きいほど、転送されるトルクMが小さくなる。逆もまた同様。
【0015】
巻取材料のトルク自動調整装置の作動原理は以下の通りである。
【0016】
第1の駆動ネジ11の左側はモータに連結し、モータの動力を受け、自動調整装置を起動させる。モータは第1の駆動ネジ11を回転速度n1で回転させる。第2の駆動ネジ12と第1の駆動ネジ11とは噛合い、且つ第1の駆動ネジ11と第2の駆動ネジ12は固定されたため、第1の駆動ネジ11は第2の駆動ネジ12を回転させ、且つ第2の駆動ネジ12の回転速度は第1の駆動ネジ11と一致し、同様にn1である。
【0017】
第1の駆動ネジ11の右側は電磁トルク装置に連結し、電磁トルク装置は第1の駆動ネジ11と連結する左側のトルクM(左端の作用力は第1の張力F)を電磁トルク装置の右端に転送する。この時の電磁トルク装置の左端と右端との距離をLとし、右端が受けた左端からのトルクをM1(右端の作用力は第2の張力F1)とし、右端のトルクM1は受動ネジ2を回転させ、受動ネジ2の回転速度をn2にする。
【0018】
受動ネジ2の回転速度n2<第3の駆動ネジ13の回転速度n1(受動ネジ2に与えられた第2の張力F1<第1の駆動ネジ11に与えられた第1の張力F)の場合、受動ネジ2は左側に移動し、電磁トルクの間隔Lは縮小し、それで左端から右端に転送されるトルクM1は増大し、即ち受動ネジ2に与えられた第2の張力F1は、受動ネジ2の回転速度n2=第3の駆動ネジ13の回転速度n3となるまで増大し、受動ネジ2の回転速度と駆動ネジ13の回転速度とは一致になり、位置は相対的に固定される。この時、受動ネジ2に与えられた第2の張力F1=第1の駆動ネジ11に与えられた第1の張力F、トルクM1を自動的に調整し、受動ネジ2に与えられた第2の張力F1の安定を維持する(F1=F)目的を達成する。材料の半径が次第に縮小する(R1からR2になる)時、第2の張力F1は次第に増大し、第2の張力F1は同時に受動ネジ2に与えられるため、第2の張力F1が増大すると、受動ネジ2の回転速度n2もそれに従って増大する。受動ネジ2の回転速度n2>第3の駆動ネジ13の回転速度n1となる場合、受動ネジ2は右側に移動し、電磁トルクの両端の間隔Lは増大する。Lが増大するため、そのトルクM1が縮小し、受動ネジ2に与えられた第2の張力F1も、第2の張力F1=第1の張力Fとなるまで次第に縮小する。
【0019】
本実施例において、第1の駆動ネジ11と、第2の駆動ネジ12と、第3の駆動ネジ13との回転速度は一致してn1であり、第1の張力Fの大きさを反映する。受動ネジ2の回転速度はn2であり、第2の張力F1の大きさを反映する。第1の張力Fと第2の張力F2とが不一致である場合、受動ネジ2は、回転速度n1=n2となるまで左、或いは右へ移動し、受動ネジ2に与えられたトルクに対する自動的な調整、即ち第2の張力F1と第1の張力Fとが終始一致することを維持するように、受動ネジ2に与えられた第2の張力F1を自動的に調整することを実現する。
【0020】
本実施例において、駆動モジュールは更に第1の駆動歯車と、第2の駆動歯車と、第3の駆動ネジと、からなってもよい。第1の駆動歯車と第2の駆動歯車との回転速度の一致を保証できれば、第1の駆動歯車と第2の駆動歯車とは相互に噛合ってもよく、チェーンを介して連結してもよい。本実施例において、駆動モジュールは更に第1の駆動回転輪と、第2の駆動回転輪と、第3の駆動ネジと、からなってもよい。第1の駆動回転輪と第2の駆動回転輪とをベルトを介して連結し、第1の駆動回転輪と第2の駆動回転輪との回転速度の一致を保証する。作用原理は前記分析と同じである。
【0021】
図4は本発明にかかるトルク自動調整装置の実施例2の構造概略図である。図4に示すように、該トルクの自動調整装置と実施例1との相違点は以下の通りである。即ち、本実施例において駆動モジュールを構成する第1の駆動ネジ11は移動可能なものであり、受動モジュールとする受動ネジ2は固定されたものであり、駆動モジュールを構成する第2の駆動ネジ12と第3の駆動ネジ13も固定されたものである。この時、受動ネジ2は第2の駆動ネジ12と第3の駆動ネジ13を回転させ、即ち第2の駆動ネジ12と第3の駆動ネジ13との回転速度は受動ネジ2の回転速度と一致である。受動ネジ2の回転速度n2>第1の駆動ネジ11の回転速度n1(第2の張力F1>第1の張力F)の場合、駆動ネジ11は左側に移動し、Lは増大する。それにより、第2の張力F1=第1の張力Fとなるまで、電磁トルク装置が転送するトルクが小さくなり、即ちM1が低減する。受動ネジ2の回転速度n2<第1の駆動ネジ11の回転速度n1(第2の張力F1<第1の張力F)の場合、駆動ネジ11は右側に移動し、電磁トルク装置両端の間隔Lは縮小する。それにより、第2の張力F1=第1の張力Fとなるまで、電磁トルク装置が転送するトルクが大きくなり、即ちM1が増大する。
【0022】
本実施例において、受動ネジ2と、第2の駆動ネジ12と、第3の駆動ネジ13との回転速度は一致してn2であり、第2の張力F1の大きさを反映する。第1の駆動ネジ11の回転速度はn1であり、第1の張力Fの大きさを反映する。第1の張力Fと第2の張力F2とが一致していない場合、第1の駆動ネジ11は、回転速度n1= n2となるまで左或いは右へ移動し、受動ネジ2に与えられたトルクに対する自動的に調整する。即ち第2の張力F1と第1の張力Fとが終始一致することを維持するように、受動ネジ2に与えられた第2の張力F1を自動的に調整することを実現する。
【0023】
本実施例において、駆動モジュールは更に第1の駆動ネジと、第2の駆動ネジと、第3の駆動歯車と、からなってもよい。受動歯車は受動モジュールとし、第3の駆動歯車と受動歯車との回転速度の一致を保証できれば、第3の駆動歯車と受動歯車とは相互に噛合ってもよく、チェーンを介して連結してもよい。本実施例において、駆動モジュールは更に第1の駆動ネジと、第2の駆動ネジと、第3の駆動回転輪と、からなってもよい。受動回転輪は受動モジュールとし、第3の駆動回転輪と受動回転輪とをベルトを介して連結し、第3の駆動回転輪と受動回転輪との回転速度の一致を保証する。作用原理は前記分析と同じである。
【0024】
本発明にかかるトルク自動調整装置の実施例1と実施例2は、電磁トルク装置の両端に夫々固定されたネジと移動可能のネジとを連結することにより、材料に与えられる力の大きさと材料に連結するネジの回転速度とは正比例にし、電磁トルク装置の転送トルクと電磁トルク両端の間の間隔とは反比例にするという原理を利用し、材料に与えられるトルクを自動的に調整し、材料に与えられる力の安定を保証し、材料供給或いは回収の精密度を保証する。
【0025】
上記実施例は本発明の技術案を説明するものであり、限定するものではない。最良な実施形態を参照して本発明を詳細に説明したが、当業者にとって、必要に応じて異なる材料や設備などをもって本発明を実現できる。即ち、その要旨を逸脱しない範囲内において種種の形態で実施しえるものである。
【符号の説明】
【0026】
2 受動ネジ
3 電磁トルク装置
11 第1の駆動ネジ
12 第2の駆動ネジ
13 第3の駆動ネジ
【技術分野】
【0001】
本発明は、巻取式で材料の供給及び廃棄物の回収を行う装置、特にトルク自動調整装置に関する。
【背景技術】
【0002】
生産プロセスにおいて、巻取式で一部の原材料/補助材料を供給し、廃棄物を回収する。このような材料供給及び回収プロセスにおいて、駆動モータのトルクM(M=R×F)は一定になるように安定性が維持され、巻取材料の半径Rが材料の供給に従って変化するため、材料の張力Fはそれに応じて変化し、材料供給の精密度を影響する。
【0003】
図1は従来技術の巻取材料の供給或いは回収の張力の変化概略図である。作動当初の巻取式材料盤の半径R1は最大であり、この時張力F1は最小である。暫く使用した後、材料盤の半径R2は縮小し、トルクMが安定して一定とする場合、張力F2は増大する。
【0004】
従来の対応策としては、巻いた材料の側に夫々の半径に対応する3つの半径検出センサーを設置することである。例えば、第1のセンサーは半径R1に対応し、第2のセンサーは半径R2に対応し、第3のセンサーは半径R3に対応する。3つのセンサーが同時に触発される場合、モータの出力トルクM1がM1=R1×Fである。第2のセンサーと第3のセンサーが触発される場合、モータの出力トルクM2がM2=R2×Fである。第3のセンサーしか触発されない場合、モータの出力トルクM3がM2=R3×Fである。このように、材料の半径が変化した後(夫々R1、R2、R3)、トルクもそれに従って変化し(夫々M1、M2、M3)、それによってFの安定が維持される。
【発明の概要】
【発明が解決しようとする課題】
【0005】
この技術案の欠陥は、トルクの変化は跳躍性の変化であることである。即ちトルクM1と、トルクM2と、トルクM3との間の差異は大きく、緩和した漸進的変化が実現できない。また、巻いた材料の半径はR1とR2との間、又はR2とR3との間である場合、張力Fも半径の変化に従って変化し続け、それにより材料の供給或いは回収の精密度が欠如している。
【課題を解決するための手段】
【0006】
本発明はトルク自動調整装置を提供し、従来技術において巻取材料を供給或いは回収する時に装置の張力が不安定という問題を解決し、材料の供給或いは回収装置のトルクに対する自動的な調整を実現し、その張力を安定させ、材料の供給或いは回収の精密度を保証する。
【0007】
本発明の幾つかの実施例により以下の技術案を提供した。即ち、
トルク自動調整装置であって、
動力入力設備と連結し、動力入力設備から生じる第1の張力である作用力を有する駆動モジュールと、
巻取材料と連結し、巻取材料に与える第2の張力である作用力を有する受動モジュールと、
前記駆動モジュールと受動モジュールとに連結し、前記第2の張力と前記第1の張力とが一致することを維持するように、前記第2の張力に基づいて前記駆動モジュールと受動モジュールとの距離を調整する調整モジュールと、を備える。
【0008】
本発明は幾つかの実施例により、巻取材料の供給或いは回収装置のトルクを自動的に調整し、巻取材料の供給或いは回収装置の張力が終始一致することを保証し、それにより材料供給或いは回収の精密度を保証する。
【図面の簡単な説明】
【0009】
【図1】従来技術において巻取材料の供給或いは回収の張力変化の概略図
【図2】本発明にかかるトルク自動調整装置構造の概略図
【図3】本発明にかかるトルク自動調整装置の実施例1の構造概略図
【図4】本発明にかかるトルク自動調整装置の実施例2の構造概略図
【発明を実施するための形態】
【0010】
添付図と具体的な実施例により本発明の技術案を更に詳細に説明する。
【0011】
図2は本発明にかかるトルク自動調整装置構造の概略図である。図2に示すように、該トルク自動調整装置は、外部動力を導入し、第1の張力である作用力を有する駆動モジュール1と、巻取材料と連結し、巻取材料に作用される第2の張力を反映する受動モジュールと、駆動モジュール1とも受動モジュールとも連結し、第1の張力と第2の張力を受け、更に第1の張力と終始一致させるように、第2の張力を自動的に調整する調整モジュールと、を備える。
【0012】
本実施例により、巻取材料の供給或いは回収装置のトルクを自動的に調整でき、該巻取材料の供給或いは回収装置に作用する張力の安定を維持し、それにより材料の供給或いは回収の精密度を保証する。
【0013】
図3は発明にかかるトルク自動調整装置の実施例1の構造概略図である。図3に示すように、該トルク自動調整装置は、第1の駆動ネジ11と、第2の駆動ネジ12と第3の駆動ネジ13とからなる駆動モジュールと、受動モジュールとする受動ネジ2と、及び調整モジュールとする電磁トルク装置3と、を備える。第1の駆動ネジ11と、第2の駆動ネジ12と、第3の駆動ネジ13とは軸受により軸に固定され、受動ネジ2は軸において所定の範囲内で移動できる。第1の駆動ネジ11の左側はモータに連結し、材料の供給或いは回収装置の起動に用いられ、起動後、第1の駆動ネジ11の回転速度をn1とし、第1の駆動ネジ11は噛合いによって第2の駆動ネジ12を回転させ、第1の駆動ネジ11と第2の駆動ネジ12とはみな軸受により固定され、両者の位置は固定するため、第1の駆動ネジ11が第2の駆動ネジ12を回転させた後、第2の駆動ネジ12の回転速度は第1の駆動ネジ11の回転速度と一致し、同様にn1である。第3の駆動ネジ13と第2の駆動ネジ12との位置も相対的に固定するため(第2の駆動ネジ12と第3の駆動ネジ13が所在する軸を固定する、又は第2の駆動ネジ12と第3の駆動ネジ13を同じ軸に設置することができる)、第3の駆動ネジ13の回転速度は第2の駆動ネジ12の回転速度と一致し、同様にn1である。第3の駆動ネジ13と噛合った受動ネジ2の右側は巻取材料に連結し、受動ネジ2は軸に固定されず、所定の距離内前後移動でき、受動ネジ2の回転速度をn2とし。受動ネジ2の回転速度n2>第3の駆動ネジ13の回転速度n1の場合、受動ネジ2は右側に移動し(材料への方向)、受動ネジ2の回転速度n2<第3の駆動ネジ13の回転速度n1の場合、受動ネジ2は左側に移動し(材料から離れる方向)、受動ネジ2の回転速度n2=第3の駆動ネジ13の回転速度n1の場合、両者の速度が一致した後、第3の駆動ネジ13と受動ネジ2との相対的な位置は固定的となる。前記条件は、相互に噛合った第3の駆動ネジ13と受動ネジ2とのねじ山の間隔、及び方向を一致に設計することによって満足できる。
【0014】
電磁トルク3装置は電磁力によってトルクを転送し、即ち電磁トルク装置の一端が電磁N極であり、他端がS極であり、両極は間隔Lをもって対向する。「異なる極は互いに引き合う」という原理により、N極が回転する時、S極もそれに従って回転する。N極とS極との間の転送トルクMと、両者の間隔Lとは反比例で、間隔Lが大きければ大きいほど、転送されるトルクMが小さくなる。逆もまた同様。
【0015】
巻取材料のトルク自動調整装置の作動原理は以下の通りである。
【0016】
第1の駆動ネジ11の左側はモータに連結し、モータの動力を受け、自動調整装置を起動させる。モータは第1の駆動ネジ11を回転速度n1で回転させる。第2の駆動ネジ12と第1の駆動ネジ11とは噛合い、且つ第1の駆動ネジ11と第2の駆動ネジ12は固定されたため、第1の駆動ネジ11は第2の駆動ネジ12を回転させ、且つ第2の駆動ネジ12の回転速度は第1の駆動ネジ11と一致し、同様にn1である。
【0017】
第1の駆動ネジ11の右側は電磁トルク装置に連結し、電磁トルク装置は第1の駆動ネジ11と連結する左側のトルクM(左端の作用力は第1の張力F)を電磁トルク装置の右端に転送する。この時の電磁トルク装置の左端と右端との距離をLとし、右端が受けた左端からのトルクをM1(右端の作用力は第2の張力F1)とし、右端のトルクM1は受動ネジ2を回転させ、受動ネジ2の回転速度をn2にする。
【0018】
受動ネジ2の回転速度n2<第3の駆動ネジ13の回転速度n1(受動ネジ2に与えられた第2の張力F1<第1の駆動ネジ11に与えられた第1の張力F)の場合、受動ネジ2は左側に移動し、電磁トルクの間隔Lは縮小し、それで左端から右端に転送されるトルクM1は増大し、即ち受動ネジ2に与えられた第2の張力F1は、受動ネジ2の回転速度n2=第3の駆動ネジ13の回転速度n3となるまで増大し、受動ネジ2の回転速度と駆動ネジ13の回転速度とは一致になり、位置は相対的に固定される。この時、受動ネジ2に与えられた第2の張力F1=第1の駆動ネジ11に与えられた第1の張力F、トルクM1を自動的に調整し、受動ネジ2に与えられた第2の張力F1の安定を維持する(F1=F)目的を達成する。材料の半径が次第に縮小する(R1からR2になる)時、第2の張力F1は次第に増大し、第2の張力F1は同時に受動ネジ2に与えられるため、第2の張力F1が増大すると、受動ネジ2の回転速度n2もそれに従って増大する。受動ネジ2の回転速度n2>第3の駆動ネジ13の回転速度n1となる場合、受動ネジ2は右側に移動し、電磁トルクの両端の間隔Lは増大する。Lが増大するため、そのトルクM1が縮小し、受動ネジ2に与えられた第2の張力F1も、第2の張力F1=第1の張力Fとなるまで次第に縮小する。
【0019】
本実施例において、第1の駆動ネジ11と、第2の駆動ネジ12と、第3の駆動ネジ13との回転速度は一致してn1であり、第1の張力Fの大きさを反映する。受動ネジ2の回転速度はn2であり、第2の張力F1の大きさを反映する。第1の張力Fと第2の張力F2とが不一致である場合、受動ネジ2は、回転速度n1=n2となるまで左、或いは右へ移動し、受動ネジ2に与えられたトルクに対する自動的な調整、即ち第2の張力F1と第1の張力Fとが終始一致することを維持するように、受動ネジ2に与えられた第2の張力F1を自動的に調整することを実現する。
【0020】
本実施例において、駆動モジュールは更に第1の駆動歯車と、第2の駆動歯車と、第3の駆動ネジと、からなってもよい。第1の駆動歯車と第2の駆動歯車との回転速度の一致を保証できれば、第1の駆動歯車と第2の駆動歯車とは相互に噛合ってもよく、チェーンを介して連結してもよい。本実施例において、駆動モジュールは更に第1の駆動回転輪と、第2の駆動回転輪と、第3の駆動ネジと、からなってもよい。第1の駆動回転輪と第2の駆動回転輪とをベルトを介して連結し、第1の駆動回転輪と第2の駆動回転輪との回転速度の一致を保証する。作用原理は前記分析と同じである。
【0021】
図4は本発明にかかるトルク自動調整装置の実施例2の構造概略図である。図4に示すように、該トルクの自動調整装置と実施例1との相違点は以下の通りである。即ち、本実施例において駆動モジュールを構成する第1の駆動ネジ11は移動可能なものであり、受動モジュールとする受動ネジ2は固定されたものであり、駆動モジュールを構成する第2の駆動ネジ12と第3の駆動ネジ13も固定されたものである。この時、受動ネジ2は第2の駆動ネジ12と第3の駆動ネジ13を回転させ、即ち第2の駆動ネジ12と第3の駆動ネジ13との回転速度は受動ネジ2の回転速度と一致である。受動ネジ2の回転速度n2>第1の駆動ネジ11の回転速度n1(第2の張力F1>第1の張力F)の場合、駆動ネジ11は左側に移動し、Lは増大する。それにより、第2の張力F1=第1の張力Fとなるまで、電磁トルク装置が転送するトルクが小さくなり、即ちM1が低減する。受動ネジ2の回転速度n2<第1の駆動ネジ11の回転速度n1(第2の張力F1<第1の張力F)の場合、駆動ネジ11は右側に移動し、電磁トルク装置両端の間隔Lは縮小する。それにより、第2の張力F1=第1の張力Fとなるまで、電磁トルク装置が転送するトルクが大きくなり、即ちM1が増大する。
【0022】
本実施例において、受動ネジ2と、第2の駆動ネジ12と、第3の駆動ネジ13との回転速度は一致してn2であり、第2の張力F1の大きさを反映する。第1の駆動ネジ11の回転速度はn1であり、第1の張力Fの大きさを反映する。第1の張力Fと第2の張力F2とが一致していない場合、第1の駆動ネジ11は、回転速度n1= n2となるまで左或いは右へ移動し、受動ネジ2に与えられたトルクに対する自動的に調整する。即ち第2の張力F1と第1の張力Fとが終始一致することを維持するように、受動ネジ2に与えられた第2の張力F1を自動的に調整することを実現する。
【0023】
本実施例において、駆動モジュールは更に第1の駆動ネジと、第2の駆動ネジと、第3の駆動歯車と、からなってもよい。受動歯車は受動モジュールとし、第3の駆動歯車と受動歯車との回転速度の一致を保証できれば、第3の駆動歯車と受動歯車とは相互に噛合ってもよく、チェーンを介して連結してもよい。本実施例において、駆動モジュールは更に第1の駆動ネジと、第2の駆動ネジと、第3の駆動回転輪と、からなってもよい。受動回転輪は受動モジュールとし、第3の駆動回転輪と受動回転輪とをベルトを介して連結し、第3の駆動回転輪と受動回転輪との回転速度の一致を保証する。作用原理は前記分析と同じである。
【0024】
本発明にかかるトルク自動調整装置の実施例1と実施例2は、電磁トルク装置の両端に夫々固定されたネジと移動可能のネジとを連結することにより、材料に与えられる力の大きさと材料に連結するネジの回転速度とは正比例にし、電磁トルク装置の転送トルクと電磁トルク両端の間の間隔とは反比例にするという原理を利用し、材料に与えられるトルクを自動的に調整し、材料に与えられる力の安定を保証し、材料供給或いは回収の精密度を保証する。
【0025】
上記実施例は本発明の技術案を説明するものであり、限定するものではない。最良な実施形態を参照して本発明を詳細に説明したが、当業者にとって、必要に応じて異なる材料や設備などをもって本発明を実現できる。即ち、その要旨を逸脱しない範囲内において種種の形態で実施しえるものである。
【符号の説明】
【0026】
2 受動ネジ
3 電磁トルク装置
11 第1の駆動ネジ
12 第2の駆動ネジ
13 第3の駆動ネジ
【特許請求の範囲】
【請求項1】
トルク自動調整装置であって、
動力入力設備と連結する駆動モジュールと、
巻取材料と連結する受動モジュールと、
前記駆動モジュールと受動モジュールとに連結する調整モジュールと、
を備え、
前記動力入力設備が前記駆動モジュールに作用する作用力が第1の張力であり、前記受動モジュールの作用力は前記巻取材料に加える第2の張力であり、
前記第2の張力と前記第1の張力とが一致することを維持するように、前記調整モジュールは前記第2の張力に基づいて自動的に前記駆動モジュールと受動モジュールとの距離を調整し、
前記駆動モジュールは、移動可能の第1の駆動ネジと、位置が固定された第2の駆動ネジ及び第3の駆動部材と、を備え、前記第1の駆動ネジと第2の駆動ネジとは相互に噛合い、前記第2の駆動ネジと第3の駆動部材とは相互に連結し、且つ両者の回転速度は一致し、前記第1の駆動ネジの先端に動力入力設備が連結され、
前記受動モジュールは位置が固定された受動部材を備え、その後端に巻取材料が連結され、
前記調整モジュールは電磁トルク装置を備え、該電磁トルク装置の一端が前記第1の駆動ネジの後端に連結し、他端が前記受動部材の先端に連結し、
前記第3の駆動部材と受動部材は、それぞれ相互に噛合う第3の駆動ネジと受動ネジや、相互に噛合う第3の駆動歯車と受動歯車や、ベルトを介して連結された第3の駆動回転輪と受動回転輪、又は、チェーンを介して連結された前記第3の駆動歯車と受動歯車であることを特徴とするトルク自動調整装置。
【請求項1】
トルク自動調整装置であって、
動力入力設備と連結する駆動モジュールと、
巻取材料と連結する受動モジュールと、
前記駆動モジュールと受動モジュールとに連結する調整モジュールと、
を備え、
前記動力入力設備が前記駆動モジュールに作用する作用力が第1の張力であり、前記受動モジュールの作用力は前記巻取材料に加える第2の張力であり、
前記第2の張力と前記第1の張力とが一致することを維持するように、前記調整モジュールは前記第2の張力に基づいて自動的に前記駆動モジュールと受動モジュールとの距離を調整し、
前記駆動モジュールは、移動可能の第1の駆動ネジと、位置が固定された第2の駆動ネジ及び第3の駆動部材と、を備え、前記第1の駆動ネジと第2の駆動ネジとは相互に噛合い、前記第2の駆動ネジと第3の駆動部材とは相互に連結し、且つ両者の回転速度は一致し、前記第1の駆動ネジの先端に動力入力設備が連結され、
前記受動モジュールは位置が固定された受動部材を備え、その後端に巻取材料が連結され、
前記調整モジュールは電磁トルク装置を備え、該電磁トルク装置の一端が前記第1の駆動ネジの後端に連結し、他端が前記受動部材の先端に連結し、
前記第3の駆動部材と受動部材は、それぞれ相互に噛合う第3の駆動ネジと受動ネジや、相互に噛合う第3の駆動歯車と受動歯車や、ベルトを介して連結された第3の駆動回転輪と受動回転輪、又は、チェーンを介して連結された前記第3の駆動歯車と受動歯車であることを特徴とするトルク自動調整装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−141063(P2012−141063A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2012−91724(P2012−91724)
【出願日】平成24年4月13日(2012.4.13)
【分割の表示】特願2008−141723(P2008−141723)の分割
【原出願日】平成20年5月29日(2008.5.29)
【出願人】(507134301)北京京東方光電科技有限公司 (90)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成24年4月13日(2012.4.13)
【分割の表示】特願2008−141723(P2008−141723)の分割
【原出願日】平成20年5月29日(2008.5.29)
【出願人】(507134301)北京京東方光電科技有限公司 (90)
【Fターム(参考)】
[ Back to top ]