
トレイ下降装置
【課題】簡易な構成で上側のコンベアから下側のコンベアへトレイを速やかに搬送することができるトレイ下降装置を提供することである。
【解決手段】トレイ6を上側コンベア4上で待機させる待機手段10と、上側コンベア4から下側コンベア5へトレイ6を下降させる下降手段とを備えており、前記待機手段10は、次回下降分のトレイ6のうちの搬送方向の最も下流側にあるトレイ6を衝突させる第一当接部11を有しており、前記下降手段にはトレイ支持部材9とカム7とを有しており、前記トレイ支持部材9はカム7の回転と連動して上側コンベア4と下側コンベア5の間を往復移動し、前記カム7は待機手段10の第一当接部11をリフトさせることができ、前記カム7が第一当接部11をリフトさせると、トレイ6の第一当接部11への当接が解除され且つトレイ6がトレイ支持部材9上に載置される。
【解決手段】トレイ6を上側コンベア4上で待機させる待機手段10と、上側コンベア4から下側コンベア5へトレイ6を下降させる下降手段とを備えており、前記待機手段10は、次回下降分のトレイ6のうちの搬送方向の最も下流側にあるトレイ6を衝突させる第一当接部11を有しており、前記下降手段にはトレイ支持部材9とカム7とを有しており、前記トレイ支持部材9はカム7の回転と連動して上側コンベア4と下側コンベア5の間を往復移動し、前記カム7は待機手段10の第一当接部11をリフトさせることができ、前記カム7が第一当接部11をリフトさせると、トレイ6の第一当接部11への当接が解除され且つトレイ6がトレイ支持部材9上に載置される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物をトレイに入れて目的の場所まで搬送し、当該場所でトレイから物を取り出した後の空になったトレイがコンベア上で滞留しないようにするためのコンベアシステムに関するものである。
【背景技術】
【0002】
野菜などの収穫物を箱詰めする際には、予め、収穫した野菜を種類毎に大きさと形状が同程度(許容範囲内)のものを揃える必要がある。そこで従来から、大きさ及び形状が同程度の収穫物を揃える場所と、揃えた収穫物を箱詰めする場所とを別々に用意し、別々の場所で別々の作業を行うことによって、作業能率を向上させる手法が採用されている。
【0003】
ところで、このように作業を分担することに伴って、収穫物を選別する場所と収穫物を箱詰めする場所とが離れてしまうため、両場所をコンベアで結び、収穫物をコンベアで搬送する必要性が出てきた。このようなコンベア装置が、例えば特許文献1に開示されている。
【特許文献1】実用新案登録公報第2597351号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されているコンベア装置は、上下二段に固定された固定コンベアと、昇降可能な別の可動コンベアとで構成されている。このコンベア装置は、上側の固定コンベアで野菜(胡瓜)を入れた容器を搬送し、上昇位置にある可動コンベア上で容器から野菜を取り出し、その後、可動コンベアを下側のコンベアと同じ高さまで降下させ、空の容器を下側の固定コンベアへ移動させ、下側の固定コンベアで空の容器を上側の固定コンベアとは逆方向に移送して空の容器を再利用できるように構成されている。
【0005】
ここで、特許文献1に開示されているコンベア装置では、上側の固定コンベアによって容器を搬送する方向と、下側の固定コンベアによって容器を搬送する方向とが逆になっている。そのため、上述のように容器を搬送するためには、可動コンベアは、上側の固定コンベアから容器を受け取り、さらに下側コンベアへ容器を送り出すことができるように、正逆両方向に駆動可能に構成しなければならず、一方向にのみ駆動させる構成のコンベアよりも重量が重くなる。
【0006】
さらに、この正逆両方向に動作可能な可動コンベアを上下移動させるためには、油圧シリンダ等の強力なアクチュエータが必要である。特に、可動コンベアの上昇位置では、容器に野菜が入っているため、このアクチュエータは、容器や可動コンベアの重量のみではなく、野菜の重量をも支持可能なものでなければならない。
【0007】
よって、特許文献1に開示されているような従来のコンベア装置は、構成が複雑で且つ製造コストが嵩み、さらに、空の容器を下側の固定コンベアへ渡した可動コンベアが、上側の固定コンベアの高さまで上昇する時間は、全く無駄な時間であり、野菜(容器)の搬送作業が速やかに行えないという問題があった。
【0008】
そこで本発明は、簡易な構成で上側のコンベアから下側のコンベアへトレイを移動させることができ、さらに、速やかに搬送物の搬送を行うことができるトレイ下降装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するため、請求項1の発明では、上側コンベアと下側コンベアとを備えており、前記上側コンベア及び下側コンベアが複数のトレイを連続的に搬送可能であるコンベアシステムにおいて、トレイを上側コンベア上で待機させる待機手段と、上側コンベアから下側コンベアへトレイを下降させる下降手段とを備えており、前記待機手段は、次回下降分のトレイのうちの搬送方向の最も下流側にあるトレイを衝突させる第一当接部を有しており、前記下降手段はトレイ支持部材とカムとを有しており、前記トレイ支持部材はカムの回転と連動して上側コンベアと下側コンベアの間を往復移動し、前記カムは待機手段の第一当接部をリフトさせることができ、前記カムが第一当接部をリフトさせると、トレイの第一当接部への当接が解除され且つトレイがトレイ支持部材上に載置されるようにトレイ下降装置を構成した。
【0010】
請求項1の発明を実施すると、トレイを下降させる下降手段に、トレイを載置するトレイ支持部材とカムとを備え、カムの回転によってトレイ支持部材を上側コンベアと下側コンベアの間を往復移動させるようにしたので、簡素な構成でトレイを上側コンベアから下側コンベアへ移動させることができる。また、トレイ支持部材は、カムの回転によって上下移動が可能なので、上下に速やかに移動することができ、上側コンベアから下側コンベアへのトレイの移動作業を連続的に速やかに行うことができる。
【0011】
また、トレイ支持部材がトレイを載置することができる位置にないときには、トレイを衝突させる第一当接部を有する待機手段でトレイを上側コンベア上で待機させることができ、トレイの落下を防止することができる。さらに、トレイ支持部材がトレイを載置することができる位置にあるときには、カムが待機手段の第一当接部をリフトさせて、トレイの第一当接部への当接を解除するので、トレイをトレイ支持部材上に載置することができる。
【0012】
請求項2の発明は、請求項1の発明のトレイ下降装置において、カムが第一当接部をリフトさせた際に、トレイをトレイ支持部材上で停止させる第二当接部を設けた。請求項2の発明を実施すると、トレイをトレイ支持部材上に確実に載置することができる。
【0013】
請求項3の発明は、請求項2の発明のトレイ下降装置において、前記第二当接部を待機手段に設け、カムが第一当接部をトレイから外す回転位置からさらに回転すると、カムは第二当接部をリフトさせてトレイの第二当接部への当接を解除し、トレイ支持部材上のトレイがトレイ支持部材と共に下方へ移動可能になるように構成した。
【0014】
請求項3の発明を実施すると、カムが第一当接部をトレイから外す回転位置からさらに回転するだけで、第二当接部をリフトさせてトレイの第二当接部への当接を解除することができる。よって、カムを回転させるだけで第一当接部と第二当接部とをリフトさせることができるようになり、トレイは、円滑にトレイ支持部材上に載置され、下方へ移動可能になる。
【0015】
請求項4の発明は、請求項1〜3のうちのいずれかの発明のトレイ下降装置において、下側コンベアには、前記下降手段と干渉しない位置にトレイ載置部が設けてあり、カムの回転によって前記トレイ支持部材が少なくとも最下位置にあるときには、トレイ支持部材が下側コンベアのトレイ載置部よりも下になるように構成した。
【0016】
請求項4の発明を実施すると、カムの一連の回転動作中に、トレイをトレイ支持部材側から下側コンベアのトレイ載置部側に円滑に移動させることができる。トレイをトレイ支持部材から下側コンベアのトレイ載置部に受け渡す際にも、トレイ支持部材は、停止することなく速やかに上方へ移動することができる。これにより、上側コンベアから下側コンベアへトレイを連続的に速やかに移動させることができるようになる。
【0017】
請求項5の発明は、請求項4の発明のトレイ下降装置において、トレイが下側コンベアのトレイ載置部上に載置された状態で、カムの回転によってトレイ支持部材のみが上方へ移動し、トレイ支持部材が上方へ移動した後に、トレイが下側コンベアによって搬送されるようにした。
【0018】
請求項5の発明を実施すると、下側コンベアのトレイ載置部上にトレイを載置した後のトレイ支持部材を、トレイに干渉させずに上方へ移動させることができる。また、トレイ載置部上に載置されたトレイは、トレイ支持部材が上方へ移動した後に下側コンベアによって速やかに搬送することができる。
【0019】
請求項6の発明は、請求項1〜5のうちのいずれかの発明のトレイ下降装置において、前記トレイ支持部材がトレイの両側に設けてあり、トレイの搬送方向下流側の部位には、搬送方向と直交する方向に延びる張出部が設けてあり、前記張出部をトレイ支持部材で支持し、さらにトレイ支持部材にフランジ部を設け、前記フランジ部でトレイの搬送方向上流側の部位を支持するようにした。
【0020】
請求項6の発明を実施すると、トレイの搬送方向の下流側の部位と上流側の部位とを支持することができ、トレイを確実に支持して上側コンベア側から下側コンベア側へ移動させることができるようになる。
【0021】
請求項7の発明は、請求項1〜6のうちのいずれかの発明のトレイ下降装置において、上側コンベア上において、下降可能なトレイの有無を検出するトレイ検出センサを設けた。
【0022】
請求項7の発明を実施すると、トレイ支持部材がトレイを載置可能な位置に配置されると同時にトレイをトレイ支持部材上に載置することができ、上側コンベア側から下側コンベア側へ、トレイを速やかに移動させることができるようになる。
【0023】
請求項8の発明は、請求項7の発明のトレイ下降装置において、前記トレイ検出センサがトレイを検出するまで、トレイ支持部材がトレイを支持可能な位置で停止するようにした。
【0024】
請求項8の発明を実施すると、上側コンベア上における下降可能なトレイの待機時間が解消され、上側コンベア側から下側コンベア側へ、トレイを速やかに移動させることができるようになる。
【発明の効果】
【0025】
本発明を実施すると、上側コンベア上におけるトレイの待機時間を削減することができ、トレイを上側コンベアから下側コンベアへ連続的に速やかに下降させることができるようになる。
【発明を実施するための最良の形態】
【0026】
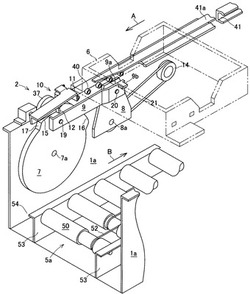
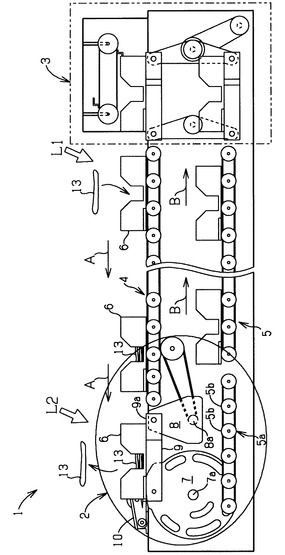
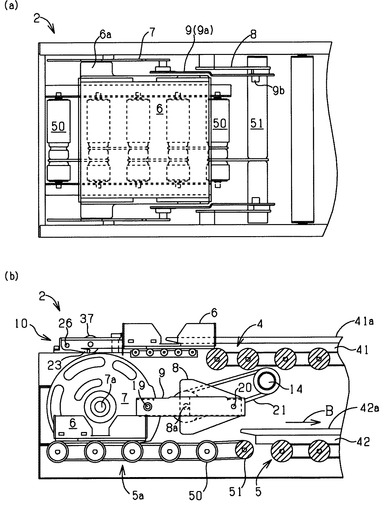
図1は、本発明のトレイ下降装置2を備えたトレイ循環装置1の主要な構成の側面図である。図1に示すようにトレイ循環装置1は、上部コンベア4(上側コンベア)と下部コンベア5(下側コンベア)とが上下に配置され、両コンベアの図1で見て左側にトレイ下降装置2が配置され、右側にトレイ上昇装置3が配置されて構成されている。
【0027】
まず、全体のトレイ循環装置1の概要を説明し、次に本発明のトレイ下降装置2について詳述する。
トレイ循環装置1は、複数のトレイ6を上部コンベア4は矢印A方向へ搬送し、下部コンベア5は矢印B方向へ搬送する。トレイ上昇装置3付近の上部コンベア4上の場所L1には、図示しないストッパが設けてあり、トレイ6は、収容物13(搬送物)の収容が完了するまで場所L1で停止する。例えば、野菜等の食品や機械部品等が収容物13としてトレイ6内に収容される。収容物13がキュウリ等の野菜であれば、予め設定した許容範囲内の形状や大きさのもの(同程度のもの)を揃えて同一のトレイ6内に入れる。収容物13の収容(搭載)が完了したトレイ6は、上部コンベア4によって左側の場所L2まで搬送される。場所L2は、トレイ下降装置2の上部、即ちトレイ6が第一当接部11又は第二当接部12に当接する位置である。場所L2において、箱詰め作業者が、トレイ6から収容物13を取り出して箱詰めを行い、トレイ6は空にされる。なお、場所L2を、トレイ下降装置2の手前の上部コンベア4上に設定することもできる。その際には、場所L2にはトレイ6を停止させるストッパ(図示せず)を設ける。
【0028】
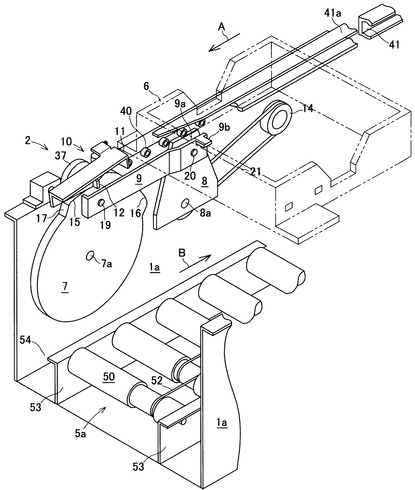
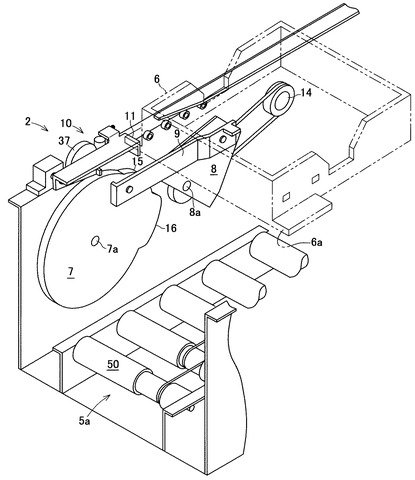
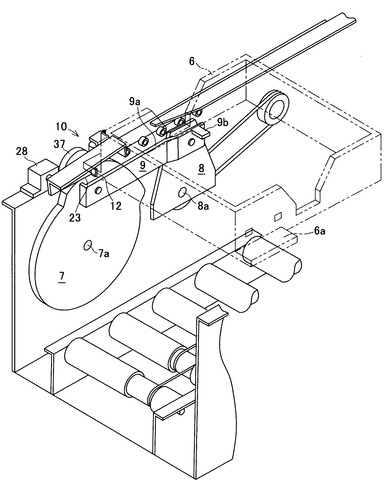
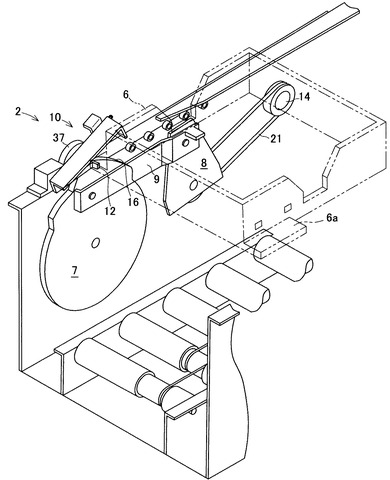
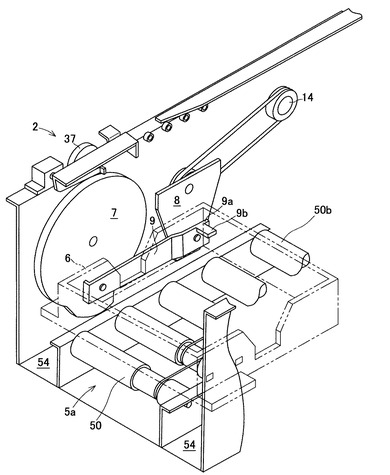
次に、本発明のトレイ下降装置2について説明する。トレイ下降装置2は、トレイ6を移動させる過程で状態が刻々と変化するので、主要な状態毎に各図を参照しながら構成を説明する。図2、図4、図6、図8、及び図10は、トレイ下降装置2の一部の記載を省略した斜視図である。図2はトレイ下降装置2にトレイ6が到達する直前の状態を示しており、図4はトレイ6がトレイ下降装置2に到達した状態を示しており、図6はトレイ6が下降可能な状態を示しており、図8はトレイ6を下降させる直前の状態を示しており、そして図10はトレイ6を下降させた状態を示している。
【0029】
空のトレイ6は、トレイ下降装置2が、図2、図4、図6、図8、及び図10に示す状態を経て上部コンベア4側から下部コンベア5(5a)側へと移される。以下では、トレイ下降装置2がトレイ6を受け入れ、トレイ6を上部コンベア4側から下部コンベア5(5a)側へ移す各過程毎に各図を参照しながら説明する。
【0030】
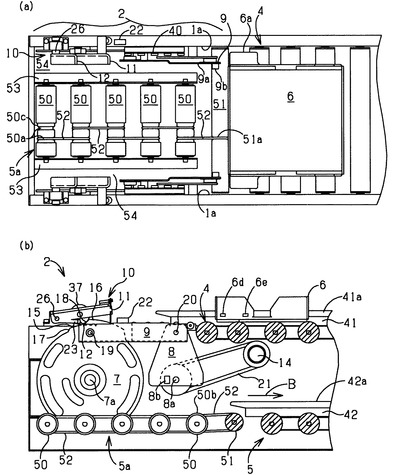
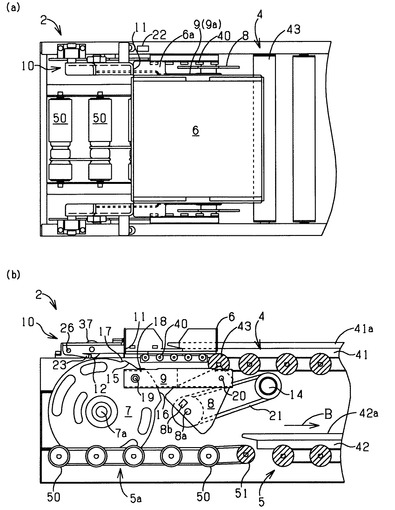
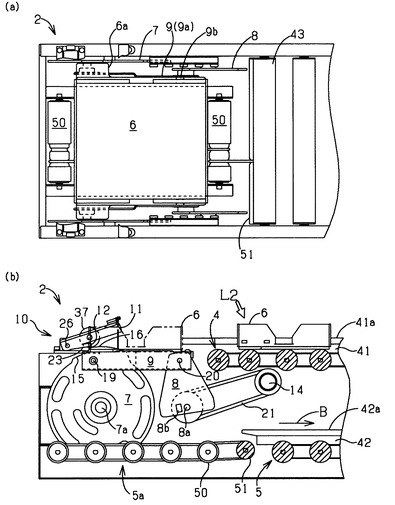
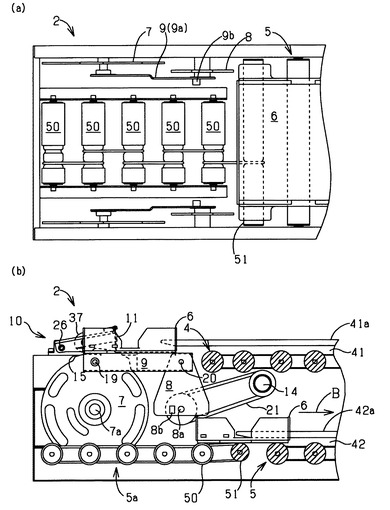
まず、トレイ下降装置2の構成を図2、図3(a)、図3(b)を参照しながら説明する。図3(a)は図2に示す状態のトレイ下降装置2の平面略図であり、図3(b)はその側面略図である。図2に示すように、トレイ下降装置2は、トレイ循環装置1の筐体を構成する側板1aに設けられている。図2では、トレイ下降装置2の構成を把握し易くするために、手前側の側板1aの記載をトレイ下降装置毎省略している。トレイ下降装置2は、下降手段と待機手段と下部コンベア5aとで構成されている。下降手段は、カム7、第一リンク8、第二リンク9、及び第一リンク8を駆動する駆動モータ14を有しており、待機手段は、第一当接部11、第二当接部12を備えたストッパ10で構成されている。また、下部コンベア5aは、後述する制御装置45で駆動が制御されており、矢印Bで示す搬送方向と直角の方向の長さが下部コンベア5の長さより短い。
【0031】
以下では、まず下降手段から説明し、続いて順に待機手段及び下部コンベア5aについて説明する。
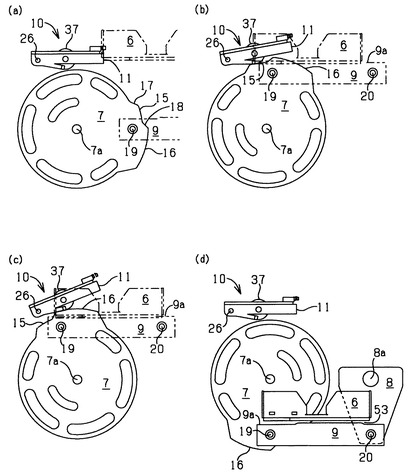
図14(a)〜(d)は、各々下降手段であるカム7と待機手段であるストッパ10を描写した側面略図である。図2や図3(a)、図3(b)では、カム7の主要な構成部分が描写しきれないため、カム7の構成は、適宜、図14(a)〜(d)を参照して説明する。
【0032】
カム7の回転軸7a及び第一リンク8の回転軸8aは、側板1aに設けた図示しない軸受によって回転自在に装着されている。カム7及び第一リンク8は、側板1aに設けた軸受によって支持される回転軸7a及び8aを中心に回転することができるようになっている。
【0033】
図14(a)に示すように、カム7の形状は略円形であるが、その外周部分の一部に段15及び段16が形成されている。カム7の段15及び段16の部分は、その他の部位よりも半径方向外側へ突出している。その各突出量については後述する。カム7の円形部分と段15の間には傾斜部17が形成されており、両者はそれぞれ傾斜部17と滑らかに接続されている。また、段15と段16の間には傾斜部18が形成されており、両者はそれぞれ傾斜部18と滑らかに接続されている。さらに、カム7は、段16付近に設けた軸19で第二リンク9と回転自在に連結されている。詳細に図示はしていないが、カム7及び第二リンク9には、それぞれ軸受が設けてある。これらの軸受で軸19を介して、カム7と第二リンク9とが回転自在に接続されている。
【0034】
図3(b)に示すように、第一リンク8は、略台形形状を呈している。その大きい方の底辺近傍には、トレイ循環装置1の側板1aに設けた前述の回転軸8aを装着する軸受部が設けてある。また、第一リンク8の台形の小さい方の底辺近傍には、軸20で第二リンク9と連結されている。すなわち、第一リンク8と第二リンク9には、各々軸20を装着するための軸受部が設けてあり、軸20は、第一リンク8と第二リンク9とを回転自在に連結している。第一リンク8には、駆動モータ14の動力がベルト21を介して伝達され、第一リンク8は回転軸8aを中心に回転する。
【0035】
すなわち、カム7と第一リンク8とは、第二リンク9によって接続されているので、駆動モータ14によって第一リンク8が回転駆動されると、動力が第二リンク9を介してカム7にも伝達され、カム7も回転軸7aを中心に回転する。ここで、カム7には、段15及び段16が設けられている分だけ重心が回転中心7aから偏心するが、図示しないアシストリンクを設置することにより、カム7と第一リンク8とが円滑に回転することができるようになっている。
【0036】
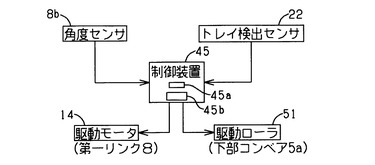
駆動モータ14は、後述する制御装置45(図18)によって駆動が制御されている。ここで図18は、本発明のトレイ下降装置の制御装置45の信号系統図である。また、トレイ循環装置1の側板1aには、トレイ検出センサ22が設けてある。トレイ検出センサ22は、後述するトレイ6の識別符6d及び6eを検出し、トレイ6がストッパ10の第一当接部11又は第二当接部12に当接していることを検出する。トレイ検出センサ22が、トレイ6の第一当接部11又は第二当接部12への当接を検出すると、検出信号が前述の制御装置45に送られる。制御装置45による制御は後述する。
【0037】
図3(a)に示すように、第二リンク9には、トレイ6の搬送方向上流側(後側)に、トレイ循環装置1の筐体の内側へ延びる内向きフランジ9bが設けてある。内向きフランジ9bは、トレイ支持部9aの一部を構成している。
【0038】
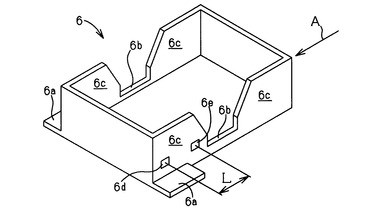
ここでトレイ6の構成を、図15を参照しながら説明する。
図15は、トレイ6の斜視図である。トレイ6には、矢印Aで示す搬送方向と直角の方向に延びる張出部6aが設けてある。張出部6aは、トレイ6の搬送方向下流側の下部に設けられている。また、トレイ6の側壁6cには、ICチップ等の記録素子からなる識別符6d及び6eが設けてある。トレイ6が第一当接部11に当接しているときには、トレイ6の識別符6dがトレイ検出センサ22と対向し、トレイ6が第二当接部12に当接しているときには、識別符6eがトレイ検出センサ22と対向するように識別符6d及び6eは、トレイ6の側壁6cに配置されている。識別符6dと6eは、距離Lだけ隔てられている。なお、描写の都合上、紙面の手前側の壁面6cのみに識別符6dと6eを描写しているが、紙面の向こう側の壁面6cにも同様に識別符6dと6eが設けられている。
【0039】
さらにトレイ6の側板6cの中央部分には上方が開口した切欠部6bが設けてある。この切欠部6bを設けることにより、図1に示す収容物13が、トレイ6内に依然として収容されているか否かを検出することができる。すなわち、場所L2におけるトレイ循環装置1のフランジ部1b上に検出センサ(例えば赤外線センサ等)を設置し、収容物13の有無が検出される。収容物13が検出された場合には、収容物13が検出されなくなるまでトレイ下降装置2によるトレイ6の下降は行わない。収容物13が検出されなくなったトレイ6は、上部コンベア4によって図1で見て左方(矢印Aの方向)へ搬送され、張出部6aが図2に示すストッパ10(待機手段)の第一当接部11に当接する。場所L2を、トレイ6がトレイ下降装置2の第二当接部12に当接する位置とした場合には、トレイ6は既にトレイ支持部材9a上に載置されており、収容物13が取り出された後、空のトレイ6は速やかに下降する。
【0040】
また、図2及び図3(b)に示すように、上部コンベア4には、トレイ6の搬送方向に延びるガイド部材41が設けてある。ガイド部材41は、左右両側の側板1a(フランジ部1b)に設けられており、その間隔はトレイ6の張出部6aの幅よりも若干大きく設定されている。よって、トレイ6(張出部6a)は、両側をガイド部材41にガイドされながら、搬送方向に真っ直ぐに搬送される。さらにガイド部材41には、上部フランジ41aが設けられている。この上部フランジ41aが、トレイ6の張出部6aに干渉し、トレイ6が上部コンベア4から外れず、確実にトレイ6を搬送することができるようになっている。図3(b)に示すように、下部コンベア5にも上部フランジ42aを備えたガイド部材42が設けられている。よって、下部コンベア5上を搬送される際にも、トレイ6が下部コンベア5から外れることはなく、確実にトレイ上昇装置3(図1)まで搬送することができる。なお、図3(a)では、他の部材の構成を明確に描写するためにガイド部材41及びガイド部材42の記載を省略している。
【0041】
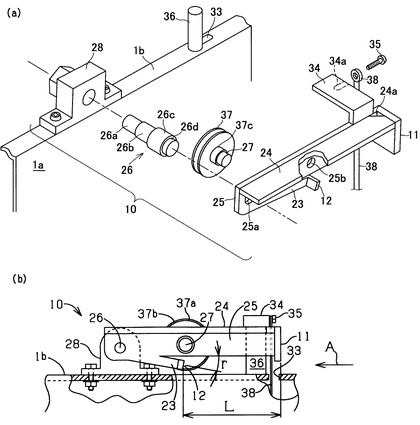
次に待機手段であるストッパ10の構成を、図16を参照しながら説明する。図16(a)は、ストッパ10の分解斜視図であり、図16(b)は、ストッパ10の側面図である。図16(b)には、トレイ6(図1)の搬送方向を矢印Aで示してある。すなわち、トレイ6は右側から左側へ搬送され、図16(b)では、トレイ6(図1)が搬送される向きに合わせてストッパ10が描写されている。
【0042】
図16(a)に示すように、ストッパ10は、本体25に、補強板24、支軸26、軸27、及びカム当接部材37等の複数の部材が装着されて構成されている。このストッパ10は、軸受部材28によってトレイ循環装置1のフランジ部1bに固定される。
【0043】
以下、ストッパ10(待機手段)の構成を詳細に説明する。
本体25は、図16(a)、図16(b)に示すような形状を呈した一枚の板状物である。本体25の上流側端部は、直角に折り曲げられて第一当接部11が形成されている。よって、第一当接部11は、トレイ6を面(当接面)で受け止めることができる。また、本体25の下部には、水平姿勢の本体25と角度rを成す枝部23が、上流方向に分岐形成されている。この枝部23の先端部分(上流側端部)は、直角に折り曲げられて第二当接部12が形成されている。図16(b)で見て、本体25を角度rだけ反時計回りに回動させると、枝部23が水平姿勢になる。枝部23が水平姿勢になった際には、前述の第一当接部11と同様に、第二当接部12(トレイ6に対する当接面)もトレイ6(図1)の搬送方向と直角の方向を向き、トレイ6を面で受け止めることができるようになる。図16(b)に示すように、第二当接部12は、第一当接部11とトレイ6(図1)の搬送方向下流側に距離Lだけ隔てられている。図16(b)では、ストッパ10の構成を詳細に示すために、図15のトレイ6よりも拡大して描写しているが、図16(b)に示す距離Lは、図15に示すトレイ6の識別符6dと識別符6eの間の距離Lと同じである。
【0044】
角度rの大きさは、カム7の段15の突出量と相関関係がある。すなわち、後述するカム当接部材37に段15が当接し、段15によってカム当接部材37が押し上げられると、枝部23が水平姿勢になるように、ストッパ10は、支軸26(後述)を中心に角度rだけ回動するように設定されている。
【0045】
併せて述べるが、カム7の段16の突出量(突出高さ)は、段15の突出量よりも大きい。よって、カム当接部材37に段16が当接し、段16によってカム当接部材37が押し上げられると、ストッパ10は、角度rを超えてさらに回動し、トレイ6の張出部6aの第二当接部12への当接が解除され、トレイ6は第二リンク9と共に下降可能になる。
【0046】
図16(a)及び図16(b)に示すように、本体25と、本体25に対して直角に折り曲げて形成された第一当接部11とは、補強板24が溶着されて補強されている。補強板24は、本体25の上部に固着されている。補強板24が、本体25と第一当接部11の折り曲げ部分と干渉しないように、補強板24には切欠部24aが設けられている。
【0047】
第一当接部11には、上部コンベア4によって搬送されるトレイ6が、勢いよく衝突することがあるが、補強板24を設けることにより、第一当接部11はトレイ6が衝突しても変形及び損傷しないようになっている。一方、第二当接部12には、一旦第一当接部11に当接して勢いがなくなったトレイ6が当接するだけであれば、第一当接部11のように補強する必要はない。しかし、第一当接部11に当接することなく第二当接部12にトレイ6が当接することがあるのであれば、第一当接部11と同様に第二当接部12も補強しておくのが望ましい。補強部材が必要か否かは、ストッパ10の本体25及び枝部23の材質や、トレイ6の重量及び搬送速度を勘案して任意に選定すればよい。
【0048】
また、本体25には、その一部を折り曲げて回動規制部34が形成されている。回動規制部34は、本体25の上流側の端部付近であって、第一当接部11の折れ曲がり方向とは逆方向に延びるように形成されている。その回動規制部34の先端側であって、トレイ6(図1)の搬送方向の上流側の部分にはねじ穴34aが設けてある。ねじ穴34aにはばね固定ねじ35が途中までねじ込まれている。ばね固定ねじ35には、図16(b)に示すばね38の一端が係合している。組立てが完了したストッパ10をフランジ部1bに設置した際には、ばね38は、フランジ部1bに設けた長孔33を貫通し、その他端は、図示していないが側板1aに固定される。これによりストッパ10は、常時下方へ付勢されるようになっている。
【0049】
図16(a)に示すように、本体25には、支軸26を通す孔25aが、トレイ6(図1)の搬送方向下流側の端部に設けられている。支軸26には、順にねじ部26a、小径部26b、大径部26c、及び本体支持部26dが形成されている。孔25aには本体支持部26dが圧入され、支軸26と本体25とは一体に回動可能となっている。
【0050】
本体25の中央付近には、孔25aとは別に孔25bが設けてある。この孔25bには軸27が脱落不能に挿通される。また、軸27はカム当接部材37の孔37cに圧入される。カム当接部材37の孔37cに軸27を圧入させることにより、カム当接部材37と軸27とは一体に固着される。よって、カム当接部材37は、軸27を介して本体25に固着される。
【0051】
カム当接部材37は、軸27と一体に固着される内周部37aと、内周部37aの外周側(外縁)の外周部37bとを有している。外周部37bは、内周部37aに対して回転可能に装着されている。内周部37aに対して回転可能な外周部37bを設けたのは、カム当接部材37がカム7の段15及び段16で押し上げられる際の摩擦抵抗を低減するためである。このように構成されたストッパ10の支軸26を、予めトレイ循環装置1のフランジ部1bに固定した軸受部材28で回転可能に支持する。
【0052】
ストッパ10は、以上のようにして軸受部材28を介してフランジ部1bに回動可能に取り付けられる。また、図16(a)に示すように、フランジ部1bには、弾性部材36が固着されている。弾性部材36は、ストッパ10が時計回りに回動した際に、回動規制部34が当接する位置に設置されている。
【0053】
さらに、回動規制部34は、ばね38によって下向き(支軸26を中心に時計回りに回動する向き)に付勢されており、下方へ付勢される回動規制部34が弾性部材36に当接し、ストッパ10は、支軸26を中心にそれ以上は下方へ回動しないようになっている。また、ストッパ10はばね38によって時計回りに付勢されて、常時、回動規制部34が弾性部材36に当接している。弾性部材36は、例えば合成ゴムや天然ゴム等の素材で構成することができる。このようにしてストッパ10は、フランジ部1bに回動可能に設置される。
【0054】
以上、ストッパ10(待機手段)の構成を説明したが、ストッパ10は、カム当接部材37に、前述のカム7(下降手段)の段15及び段16が当接すると、ばね38の弾性力に抗して反時計回りに押し上げられて回動する。
【0055】
次に、下部コンベア5aの構成を図3(a)及び図3(b)を参照しながら説明する。なお、図3(a)の平面図では、下部コンベア5aを示すために、上部コンベア4の記載を一部省略している。
【0056】
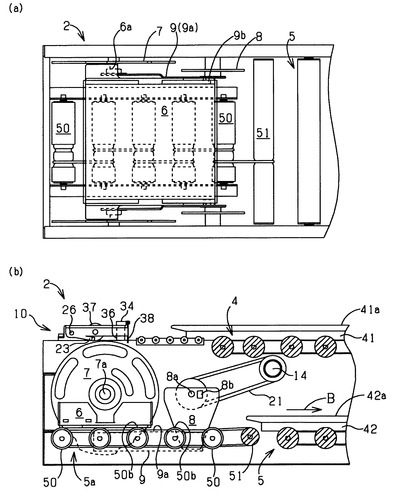
図3(a)及び図3(b)に示すように、下部コンベア5aは、複数の従動ローラ50と一つの駆動ローラ51とで構成されている。図3(a)には5つの従動ローラ50を配置した例を示している。従動ローラ50は、トレイ6を載置するトレイ載置部50bを備えている。
【0057】
また、図3(a)及び図3(b)に示すように、各従動ローラ50には、小径部50cが設けてある。この小径部50cには、ベルト52を掛ける溝50aが二箇所に設けてある。この溝50aにはベルト52が掛けられ、ベルト52によって隣接する従動ローラ50との間で回転力が伝達されるようになっている。溝50aを、小径部50cに設けることにより、後述するトレイ載置部50bにトレイ6を載置した際に、トレイ6の下面をベルト52に触れさせずに済む。
【0058】
さらに、図3(b)で見て最も右側(すなわち、矢印Bで示す搬送方向の最も下流側)の従動ローラ50の右側(下流側)には、駆動ローラ51が設置されている。駆動ローラ51は、図示しない駆動モータ(例えば内蔵式)によって駆動されるが、制御装置45(図18)によって駆動が制御される。図3(a)に示すように、駆動ローラ51には溝51aが設けてあり、溝51aにはベルト52が掛けられ、隣接する従動ローラ50に動力を伝達することができるようになっている。
【0059】
従動ローラ50は、トレイ循環装置1の底部に立設した支持部材53に、回転可能に支持されている。また、駆動ローラ51は、トレイ循環装置1の側板1aに支持されている。すなわち、従動ローラ50の軸が支持部材53に固定されており、従動ローラ50は軸を中心に円滑に回転可能になっており、また、駆動ローラ51の軸が側板1aに固定されており、駆動ローラ51は軸を中心に円滑に回転可能になっている。
【0060】
従動ローラ50の長さは、駆動ローラ51の長さよりも短い。すなわち、二つの平行に配置された支持部材53の間隔は、両側板1aの間隔よりも狭い。よって、図2、図3(a)に示すように側板1aと支持部材53の間には空間54ができる。この空間54は第二リンク9が下降することができるように設けられたものである。
【0061】
下降した第二リンク9から従動ローラ50のトレイ載置部50b上にトレイ6が載置されると、カム7と第一リンク8の回転によって第二リンク9のみが空間54内を移動し、第二リンク9は、他のいずれの部材とも衝突することなく上昇することができる。詳しくは後述するが、その後、制御装置45(図18)からの制御信号を受けて駆動ローラ51が駆動され、従動ローラ50上に載置されたトレイ6が、下部コンベア5a側から下部コンベア5側へと移動する。下部コンベア5は、常時駆動されていても差し支えないが、図示しないセンサがトレイ6を検出したら駆動するように構成することもできる。
【0062】
次に、ストッパ10の動作を、前述の図2、図4、図6、図8、図10と、これらの状態の平面図及び側面図である図3、図5、図7、図9及び図11と、図12、図13、図14(a)〜(d)とを順次参照しながら以下で説明する。
【0063】
前述の図3(a)及び(b)は、トレイ循環装置1の上部コンベア4上のトレイ6が、まだトレイ下降装置2に到達しておらず、さらに下部コンベア5a上にトレイ6がない状態を示している。図3(b)に示す状態では、第二リンク9がトレイ6を載置可能な位置に配置されている。このとき、カム7の段15がストッパ10のカム当接部材37を押し上げ、ストッパ10は、枝部23が水平姿勢を呈した状態で停止(待機)している。
【0064】
トレイ検出センサ22は、トレイ6が第一当接部11に当接したことを識別符6dで検出し、第二当接部12に当接したことを識別符6eで検出する。ストッパ10が図3(b)に示す状態であれば、いずれトレイ6が第一当接部11に当接することなく第二当接部12に当接する。トレイ6が第二当接部12に当接すると、制御装置45(図18)は駆動モータ14を駆動させる。これにより、第二当接部12にトレイ6が当接するまでは、駆動モータ14は第一リンク8を駆動せず、その結果、第二リンク9は図3の回動位置で停止している。この状態でトレイ6が搬送されてくると、トレイ6の張出部6aは第二当接部12に当接(衝突)し、駆動モータ14が駆動されて、トレイ6は第二リンク9のトレイ支持部9a上に載置される。
【0065】
図5(a)は、トレイ6が既に第一当接部11に当接している(すなわち、トレイ6が場所L2に到達している)にも関わらず、第二リンク9がまだトレイ6を載置可能な位置に配置されていない状態のトレイ下降装置2の平面略図である。また、図5(b)は、その側面略図である。また、図14(a)は、この状態におけるカム7とストッパ10のみを描写した側面略図である。
【0066】
図4、図5(a)、図5(b)及び図14(a)に示すように、第二リンク9がまだ十分に上方へ移動していない状態でトレイ6がトレイ下降装置2に到達した場合には、カム7の段15がストッパ10のカム当接部材37を押し上げる位置まで到達していないので、ストッパ10の本体25は水平姿勢となり、トレイ6の張出部6aが第一当接部11に当接し、トレイ6は上部コンベア4の補助コロ40上で停止する。よって、トレイ6は、ストッパ10の第一当接部11に当接してそれ以上の進行が阻止され、落下するのを防止することができる。
【0067】
補助コロ40は、上部コンベア4のモータローラ43によって搬送されてきたトレイ6を、トレイ下降装置2まで導くものであり、それ自体には駆動源を備えていない。補助コロ40は、トレイ6の張出部6aを支持する。トレイ6の張出部6aが第一当接部11に当接した状態では、トレイ6の上流側端部(図5(b)で見て右側の端部)が上部コンベア4の一番下流側のモータローラ43で支持されており、トレイ6には、このモータローラ43によって下流側へ向かう推進力が付与されている。通常は、図5(b)に示すように、第二リンク9が上昇する前にトレイ6がトレイ下降装置2に到達する。そして、図5(b)に示す位置(すなわち場所L2)でトレイ6から収容物13が取り出され、トレイ6は空にされる。
【0068】
仮に、図3(b)に示すような、第二リンク9が待機している状態でトレイ6が搬送されてくると、トレイ6は第一当接部11で停止させられることなく、第二当接部12に当接して停止し、第二リンク9のトレイ支持部9a上に載置される。そして、トレイ6から収容物13が取り出されて、トレイ6は空にされる。本実施の形態では、図3(b)に示すような第二リンク9が最上位置にあるときの第一リンク8の回転角度位置を角度ゼロとし、反時計回りに角度が増加するように定義している。
【0069】
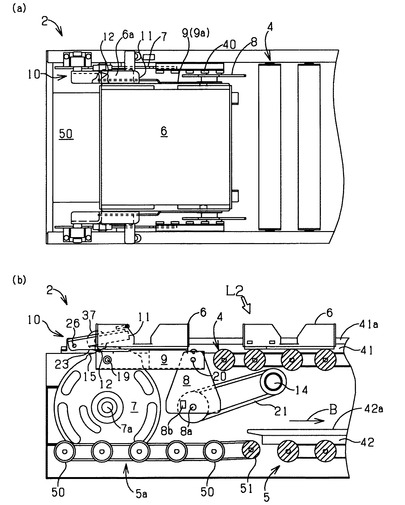
図7(a)は、トレイ6が第二当接部12に当接している際のトレイ下降装置2の平面略図であり、図7(b)は、その側面略図である。図14(b)は、この状態におけるカム7とストッパ10のみを描写した側面略図である。図7(b)、図14(b)に示すように、第二リンク9が上昇し、カム7の段15によってカム当接部材37が押し上げられると、トレイ6は、第二当接部12に当接した状態で第二リンク9のトレイ支持部9a上に載置される。
【0070】
トレイ6が、第二リンク9のトレイ支持部9a上に載置される際において、トレイ6の搬送方向の下流側部分(前側部分)は、張出部6aがトレイ支持部9aに支持される。一方、トレイ6の搬送方向の上流側部分(後側部分)は、図3(a)に示すトレイ支持部9aの内向きフランジ9b上に配置され、内向きフランジ9bで支持されるようになっている。従って、トレイ6の張出部6a(トレイ6の下流側部分)は、第二リンク9のトレイ支持部9aによって支持され、トレイ6の上流側端部は、内向きフランジ9bによって支持されるので、トレイ6は落下しない。
【0071】
トレイ支持部9a上にトレイ6が載置されると、駆動モータ14によって第一リンク8が回転駆動され、第一リンク8の回転に追従してカム7も回転し、ストッパ10のカム当接部材37は、段16によってさらに押し上げられる。図9(a)は、この状態のトレイ下降装置2の平面略図であり、図9(b)は、その側面略図である。また、図14(c)は、この状態におけるカム7とストッパ10のみを描写した側面略図である。図9(b)、図14(c)に示すように、トレイ6の第二当接部12への当接が解除されると、トレイ6は第二リンク9と共に移動(下降)可能になる。
【0072】
図7(b)ではトレイ6が第二リンク9上に載置され、図9(b)ではトレイ6を載置した第二リンク9の下降が開始される。図7(b)及び図9(b)に示すように、トレイ下降装置2には、次回下降されるトレイ6が搬送されてくる。その際、仮に第二リンク9の上昇が間に合わなければ、このトレイ6はストッパ10の第一当接部11に当接し、第二リンク9が上昇してくるまで待機する。この待機中(トレイ6の停止中)にトレイ6から収容物13を取り出すことができる。
【0073】
図11(a)は、トレイ6が第二リンク9と共に下降し、下部コンベア5a上に載置された状態のトレイ下降装置2の平面略図であり、図11(b)は、その側面略図である。また、図14(d)は、その状態のカム7とストッパ10のみを描写した側面略図である。図11(b)、図14(d)に示すように、カム7が回動し、第二リンク9が下方へ移動すると、ストッパ10のカム当接部材37に対するカム7の段16の押圧(押し上げ)が解除される。よって、ストッパ10は、ばね38の弾性力によって支軸26を中心に時計回りに回動し、回動規制部34が弾性部材36に当接して停止する。すなわち、本体25が水平姿勢となり、第一当接部11に対して、次回下降分のトレイ6の張出部6aが当接可能になる。
【0074】
図11(b)に示すような、トレイ6が下部コンベア5aのトレイ載置部50b上に載置された状態では、トレイ6(張出部6aを含む)は、図14(d)に示す隙間53だけリンク支持部9aから離れている。また、図示していないが、第二リンク9の内向きフランジ9bもトレイ6の下面から離れている。すなわち、第二リンク9は、トレイ6を下部コンベア5aのトレイ載置部50b上に載置してさらに隙間53に相当する距離だけ下降する。
【0075】
図11(b)に示す状態から、カム7及び第一リンク8がさらに進角した状態を、図12(a)、図12(b)に示す。図12(a)は、下部コンベア5a上にトレイ6を残し、第二リンク9のみが上昇する途中の状態のトレイ下降装置2の平面略図であり、図12(b)は、その側面略図である。図12(b)に示すように、カム7が図11(b)に示す状態よりさらに回転すると、第二リンク9のトレイ支持部9a(内向きフランジ9bを含む)は、トレイ6に再び当接することなく上昇し、トレイ6は下部コンベア5aのトレイ載置部50b上に残される。その後トレイ6は、張出部6aが第二リンク9及び第一リンク8に干渉されることなく矢印B方向へ搬送される。
【0076】
この状態が図13(a)及び図13(b)に示されている。図13(a)は、下部コンベア5a(トレイ下降装置2側)から下部コンベア5へトレイ6が移動した状態のトレイ下降装置2の平面略図であり、図13(b)は、その側面略図である。図13(b)に示すように、下部コンベア5へトレイ6が移動すると共に、上部コンベア4側では、カム7の段15がストッパ10のカム当接部材37を押し上げ、次回に下降されるトレイ6が第二リンク9上に載置されている。なお、図13(a)では、煩雑さを避けるために、第二リンク9上に載置された次回に下降されるトレイ6の描写を省略している。
【0077】
下部コンベア5a上にトレイ6を載置した直後に、トレイ6を下部コンベア5側へ矢印B方向に搬送すると、張出部6aが第二リンク9又は第一リンク8に衝突する。従って、張出部6aが第二リンク9及び第一リンク8に干渉しない位置まで第二リンク9が上昇する、又は第一リンク8が回転するまでは、下部コンベア5a上でトレイ6を待機させる。そして、トレイ6が矢印B方向に搬送されても第二リンク9及び第一リンク8に衝突しなくなる高さまで第二リンク9が上昇(第一リンク8が回転)すると、下部コンベア5aが駆動され、トレイ6は矢印B方向に搬送される。
【0078】
トレイ6が第二リンク9及び第一リンク8に衝突しなくなる高さとは、第二リンク9及び第一リンク8の下端が、少なくともトレイ6の張出部6aの上面より高い位置である。特に、第一リンク8は、回転角によって下端部の高さが著しく変動するので、例えば、図12(b)に示すような回転軸8aと軸20の高さが一致したときに、第一リンク8の下端が張出部6aよりも上になるように第一リンク8の形状を設定しておくと共に、第一リンク8の回転角度位置を検出する角度センサ8bを設け、この角度センサ8bが第一リンク8の回転角度が図12(b)に示すような位置になったことを検出したら、下部コンベア5aを駆動してトレイ6を矢印B方向に搬送すると、トレイ6は第一リンク8と第二リンク9のいずれにも衝突することなく下部コンベア5a側から下部コンベア5側へ移動させることができるようになる。
【0079】
トレイ下降装置2における、一つのトレイ6に着目した一連の動作は以上で終わりである。以降は、この動作が、下降させるトレイ6の数だけ繰り返される。なお、本実施の形態では、一回につき一つのトレイ6を下降させる例を示したが、第二リンク9のトレイ支持部9a上に複数のトレイ6を載置可能に、トレイ6や第二リンク9の寸法を設定してもよい。例えば、二つのトレイ6を同時にトレイ支持部9a上に配置してもよい。複数のトレイ6を同時に下降させる場合には、トレイ6の配置に対応した内向きフランジ9bを第二リンク9に適宜設け、トレイ6の前側(下流側)と後側(上流側)とを安定して支持できるようにする。
【0080】
以上では、待機手段としてのストッパ10の一連の動作は、下降手段の一部であるカム7の回転と連動している構成を例示した。このように構成すると、トレイ6の有無や第二リンク9(トレイ支持部9a)の位置に関わらず、ストッパ10の動作を制御するための特別な構成部材が不要になる。
【0081】
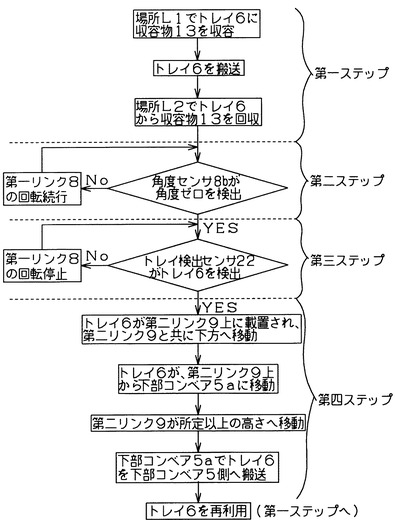
以上の動作を、図17に示す制御フロー図と、図18の制御装置45の信号系統図とを参照しながら説明する。図17に示すように、制御フローは、第一ステップ〜第四ステップの四つのステップからなる。また、トレイ下降装置2は、図18に示すような制御装置45を備えている。
【0082】
制御装置45は、演算機能を有するCPU45aと、各種の設定値を記憶することができるメモリ45bとを備えている。この制御装置45には、第一リンク8に設置した角度センサ8aと、上部コンベア4に設置したトレイ検出センサ22とから各々の検出信号が入力される。制御装置45は、角度センサ8aから入力された検出信号(値)と、メモリ45bに記憶した予め設定された値とを比較し、両者が一致した場合には、駆動モータ14による第一リンク8の駆動を停止させる。ここでは、メモリ45bには角度ゼロ値を記憶させておき、第二リンク9が最も高い位置にあるとき、すなわち、第一リンク8が角度ゼロになると、第一リンク8を停止させるようにする。もっとも、回転動作する第一リンク8には慣性力が作用しているので、この慣性力を勘案して、第二リンク9が最上位置で停止するように補正するのが好ましい。例えば、メモリ45bに記憶させる値はゼロであるが、角度センサ8aが角度350度を検出したら、駆動モータ14を停止させるようにして、第二リンク9がちょうど最上位置(角度ゼロ又は角度360度)で停止するように配慮する。
【0083】
次に、図17を参照して、各ステップ毎に説明する。
第一ステップでは、図1に示す上部コンベア4上の場所L1に配置された空のトレイ6に収容物13を収容し、収容物13を収容したトレイ6を場所L2(図1)まで搬送し、場所L2において収容物13を回収し、トレイ6内を空にする。以上の動作は、トレイ循環装置1の上部コンベア4上で全て行われる。
【0084】
次に、第二ステップでは、第一リンク8に設けた角度センサ8bによって、第一リンク8の角度位置(360度の範囲)が検出され、検出信号(検出値)が図18に示す制御装置45に入力される。仮に角度ゼロが検出されたら、第三ステップへ移行する。検出した角度がゼロでなければ、制御装置45は駆動モータ14へ制御信号を送らず、第一リンク8は回転を続行する。
【0085】
第二ステップで角度ゼロが検出されると、第三ステップに移行する。第三ステップでは、トレイ検出センサ22によってトレイ6が検出されたか否かを判定する。トレイ6が検出されなければ、制御装置45によって駆動モータ14の駆動が停止させられ、第一リンク8の回転が停止し、第二リンク9は最上位置で停止し待機する。また、同時に図示しないセンサによってトレイ6内に収容物13があるか否かが検出され、トレイ6が空になるまで第二リンク9は最上位置で停止し続ける。仮に第一リンク8が回転し続けて第二リンク9が下方に移動し、その間にトレイ6が空になると、第二リンク9が再度上昇してくるまでに要する時間が、トレイ6の待機時間となってしまい、トレイ6の速やかな搬送作業に若干の影響を及ぼす。よって、第二リンク9がトレイ6を載置せずに空回りしないように、制御装置45の制御信号によって、駆動モータ14が制御され、第二リンク9が最上位置で停止するようにする。そして、トレイ検出センサ22がトレイ6を検出すると、制御装置45は駆動モータ14を駆動させ、第一リンク8を回転させ、第四ステップへ移行する。
【0086】
仮に、第二ステップで角度センサ8aが角度ゼロを検出し、さらに第三ステップでトレイ検出センサ22がトレイ6の存在を検出すると、第一リンク8は停止することなく回転し続ける。ここで、第二リンク9のトレイ支持部9a上にトレイ6が載置され易くするために、トレイ6が第二当接部12に当接した際に、第一リンク8の回転速度を一時的に遅くする、又は、第一リンク8を暫時停止させるようにしてもよい。この一連の動作は、制御装置45のメモリ45bに予め記憶させておき、制御装置45によってメモリ45bに記憶された通りに駆動モータ14の駆動を制御するのが好ましい。
【0087】
また、トレイ6が第一当接部11に当接するより前に、第二リンク9がトレイ6を載置することができる位置(角度ゼロの位置)に配置されると、トレイ6は第一当接部11に当接することなく第二当接部12に当接する。
【0088】
そして、トレイ6内が空になると、第四ステップにおいて、トレイ6は、第二リンク9と共に下方へ移動する。第二リンク9の最下位置(角度180度の位置)では、第二リンク9のトレイ支持部9aが下部コンベア5aのトレイ載置部50bよりも下方に位置するため、トレイ6は下部コンベア5aのトレイ載置部50b上に載置される。そして、第二リンク9のみが空間54(図3(a))内を通過して最下位置から上昇し、第二リンク9が所定の高さ(第二リンク9の下面がトレイ6の張出部6aよりも上になる高さ)になったこと(すなわち、第一リンク8が予め設定した所定の角度になったこと)が角度センサ8aによって検出されると、制御装置45によって下部コンベア5a(駆動ローラ51)が駆動され、下部コンベア5a上のトレイ6は矢印B方向に搬送される。そして、トレイ6は下部コンベア5a側から下部コンベア5側へ移動し、下部コンベア5によって図1に示すトレイ上昇装置3まで搬送される。その後、空のトレイ6は、トレイ上昇装置3によって上部コンベア4側へ移動させられ、再利用される。そして、制御フローとしては、第一ステップへ戻る。
【0089】
本発明のトレイ下降装置2は、例えば、図1に示すトレイ循環装置1のような循環システムの一部として使用することができるが、トレイ循環装置1に関わらず、上側から下側へトレイを移動させる用途であれば、どのような装置にも採用することができる。
【0090】
上述の例では、トレイ6が第一当接部11又は第二当接部12に当接したことを検出するために、トレイ6に識別符6d及び6eを設けた。しかし、識別符6d及び6eは、以下のように使用することもできる。すなわち、各トレイ6毎に固有の識別番号情報を識別符6d及び6eに記録しておくと、トレイ検出センサ22が識別番号情報を読み取り、今何番目のトレイ6が下降されようとしているかを把握することができる。また、搬送(下降)されるトレイ6の積算個数が予め決まっている場合には、トレイ下降装置2が残り何個のトレイ6を下降させればよいかを制御装置45で管理することができる。すなわち、制御装置45のCPU45aによる演算機能と、搬送するトレイ6の数を記録したメモリ45bとを利用してカウンタを構成し、カウンタがゼロになれば自動的にトレイ循環装置1(又はトレイ下降装置2)を停止させるようにすることもできる。
【0091】
本実施の形態では、下降可能なトレイ6の有無を検出するセンサとしてトレイ検出センサ22を設け、さらにトレイ6に識別符6d及び6eを設ける例を示したが、トレイ検出センサ22はトレイ6が第一当接部11に当接したことのみを検出し、またトレイ6には識別符6d及び6eを設けず、代わりに、上部コンベア4側に別のトレイ検出センサを設けて、トレイ6が第二当接部12に当接したことを検出するようにしてもよい。
【0092】
上記では特に断らなかったが、上部コンベア4は、前工程の作業が滞った場合には、最前(最下流側)のトレイ6がストッパ10の第一当接部11に当接して停止させられ、後続のトレイ6は、前のトレイ6に衝突して停止する。よって、そのとき上部コンベア4の搬送ローラ(モータローラ)は空回りする。
【図面の簡単な説明】
【0093】
【図1】本発明のトレイ下降装置を備えたトレイ循環装置の主要な構成の側面略図である。
【図2】トレイ下降装置の一部の記載を省略した部分斜視図である。
【図3】(a)はトレイ下降装置の平面略図である。(b)はトレイ下降装置の側面略図である。
【図4】トレイが第一当接部に当接している状態のトレイ下降装置の部分斜視図である。
【図5】(a)は、図4の状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図6】トレイが第二当接部に当接している状態のトレイ下降装置の部分斜視図である。
【図7】(a)は、図6の状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図8】トレイへの第二当接部の当接が解除された状態のトレイ下降装置の部分斜視図である。
【図9】(a)は、図8の状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図10】トレイがリンクから下部コンベアへ移動した直後の状態のトレイ下降装置の部分斜視図である。
【図11】(a)は、トレイがリンクから下部コンベアに移された直後のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図12】(a)は、リンクがトレイを下部コンベア上に残して上方へ移動する途中のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図13】(a)は、トレイ下降装置側から下部コンベアへトレイが移動した状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図14】(a)は、ストッパ(待機手段)の第一当接部にトレイが当接している状態の側面略図である。(b)は、カムによって第一当接部へのトレイの当接が解除された状態の側面略図である。(c)は、カムによって第二当接部へのトレイの当接が解除された状態の側面略図である。(d)は、カムによってトレイ支持部材が最下位置に移動した状態の側面略図である。
【図15】トレイの斜視図である。
【図16】(a)は、ストッパの分解斜視図である。(b)は、ストッパの側面図である。
【図17】本発明のトレイ下降装置の制御フロー図である。
【図18】本発明のトレイ下降装置の制御装置の信号系統図である。
【符号の説明】
【0094】
1 トレイ循環装置
1a 側板
1b フランジ部
2 トレイ下降装置
3 トレイ上昇装置
4 上部コンベア(上側コンベア)
5、5a 下部コンベア(下側コンベア)
6 トレイ
6a 張出部
7 第一カム(下降手段)
8 第二カム(下降手段)
8a 角度センサ
9 リンク(下降手段)
9a トレイ支持部
10 ストッパ(待機手段)
11 第一当接部
12 第二当接部
15、16 段
17、18 傾斜部
22 トレイ検出センサ
25 ストッパの本体
26 ストッパの支軸
34 ストッパの回転規制部材
37 カム当接部材
45 制御装置
【技術分野】
【0001】
本発明は、物をトレイに入れて目的の場所まで搬送し、当該場所でトレイから物を取り出した後の空になったトレイがコンベア上で滞留しないようにするためのコンベアシステムに関するものである。
【背景技術】
【0002】
野菜などの収穫物を箱詰めする際には、予め、収穫した野菜を種類毎に大きさと形状が同程度(許容範囲内)のものを揃える必要がある。そこで従来から、大きさ及び形状が同程度の収穫物を揃える場所と、揃えた収穫物を箱詰めする場所とを別々に用意し、別々の場所で別々の作業を行うことによって、作業能率を向上させる手法が採用されている。
【0003】
ところで、このように作業を分担することに伴って、収穫物を選別する場所と収穫物を箱詰めする場所とが離れてしまうため、両場所をコンベアで結び、収穫物をコンベアで搬送する必要性が出てきた。このようなコンベア装置が、例えば特許文献1に開示されている。
【特許文献1】実用新案登録公報第2597351号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されているコンベア装置は、上下二段に固定された固定コンベアと、昇降可能な別の可動コンベアとで構成されている。このコンベア装置は、上側の固定コンベアで野菜(胡瓜)を入れた容器を搬送し、上昇位置にある可動コンベア上で容器から野菜を取り出し、その後、可動コンベアを下側のコンベアと同じ高さまで降下させ、空の容器を下側の固定コンベアへ移動させ、下側の固定コンベアで空の容器を上側の固定コンベアとは逆方向に移送して空の容器を再利用できるように構成されている。
【0005】
ここで、特許文献1に開示されているコンベア装置では、上側の固定コンベアによって容器を搬送する方向と、下側の固定コンベアによって容器を搬送する方向とが逆になっている。そのため、上述のように容器を搬送するためには、可動コンベアは、上側の固定コンベアから容器を受け取り、さらに下側コンベアへ容器を送り出すことができるように、正逆両方向に駆動可能に構成しなければならず、一方向にのみ駆動させる構成のコンベアよりも重量が重くなる。
【0006】
さらに、この正逆両方向に動作可能な可動コンベアを上下移動させるためには、油圧シリンダ等の強力なアクチュエータが必要である。特に、可動コンベアの上昇位置では、容器に野菜が入っているため、このアクチュエータは、容器や可動コンベアの重量のみではなく、野菜の重量をも支持可能なものでなければならない。
【0007】
よって、特許文献1に開示されているような従来のコンベア装置は、構成が複雑で且つ製造コストが嵩み、さらに、空の容器を下側の固定コンベアへ渡した可動コンベアが、上側の固定コンベアの高さまで上昇する時間は、全く無駄な時間であり、野菜(容器)の搬送作業が速やかに行えないという問題があった。
【0008】
そこで本発明は、簡易な構成で上側のコンベアから下側のコンベアへトレイを移動させることができ、さらに、速やかに搬送物の搬送を行うことができるトレイ下降装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するため、請求項1の発明では、上側コンベアと下側コンベアとを備えており、前記上側コンベア及び下側コンベアが複数のトレイを連続的に搬送可能であるコンベアシステムにおいて、トレイを上側コンベア上で待機させる待機手段と、上側コンベアから下側コンベアへトレイを下降させる下降手段とを備えており、前記待機手段は、次回下降分のトレイのうちの搬送方向の最も下流側にあるトレイを衝突させる第一当接部を有しており、前記下降手段はトレイ支持部材とカムとを有しており、前記トレイ支持部材はカムの回転と連動して上側コンベアと下側コンベアの間を往復移動し、前記カムは待機手段の第一当接部をリフトさせることができ、前記カムが第一当接部をリフトさせると、トレイの第一当接部への当接が解除され且つトレイがトレイ支持部材上に載置されるようにトレイ下降装置を構成した。
【0010】
請求項1の発明を実施すると、トレイを下降させる下降手段に、トレイを載置するトレイ支持部材とカムとを備え、カムの回転によってトレイ支持部材を上側コンベアと下側コンベアの間を往復移動させるようにしたので、簡素な構成でトレイを上側コンベアから下側コンベアへ移動させることができる。また、トレイ支持部材は、カムの回転によって上下移動が可能なので、上下に速やかに移動することができ、上側コンベアから下側コンベアへのトレイの移動作業を連続的に速やかに行うことができる。
【0011】
また、トレイ支持部材がトレイを載置することができる位置にないときには、トレイを衝突させる第一当接部を有する待機手段でトレイを上側コンベア上で待機させることができ、トレイの落下を防止することができる。さらに、トレイ支持部材がトレイを載置することができる位置にあるときには、カムが待機手段の第一当接部をリフトさせて、トレイの第一当接部への当接を解除するので、トレイをトレイ支持部材上に載置することができる。
【0012】
請求項2の発明は、請求項1の発明のトレイ下降装置において、カムが第一当接部をリフトさせた際に、トレイをトレイ支持部材上で停止させる第二当接部を設けた。請求項2の発明を実施すると、トレイをトレイ支持部材上に確実に載置することができる。
【0013】
請求項3の発明は、請求項2の発明のトレイ下降装置において、前記第二当接部を待機手段に設け、カムが第一当接部をトレイから外す回転位置からさらに回転すると、カムは第二当接部をリフトさせてトレイの第二当接部への当接を解除し、トレイ支持部材上のトレイがトレイ支持部材と共に下方へ移動可能になるように構成した。
【0014】
請求項3の発明を実施すると、カムが第一当接部をトレイから外す回転位置からさらに回転するだけで、第二当接部をリフトさせてトレイの第二当接部への当接を解除することができる。よって、カムを回転させるだけで第一当接部と第二当接部とをリフトさせることができるようになり、トレイは、円滑にトレイ支持部材上に載置され、下方へ移動可能になる。
【0015】
請求項4の発明は、請求項1〜3のうちのいずれかの発明のトレイ下降装置において、下側コンベアには、前記下降手段と干渉しない位置にトレイ載置部が設けてあり、カムの回転によって前記トレイ支持部材が少なくとも最下位置にあるときには、トレイ支持部材が下側コンベアのトレイ載置部よりも下になるように構成した。
【0016】
請求項4の発明を実施すると、カムの一連の回転動作中に、トレイをトレイ支持部材側から下側コンベアのトレイ載置部側に円滑に移動させることができる。トレイをトレイ支持部材から下側コンベアのトレイ載置部に受け渡す際にも、トレイ支持部材は、停止することなく速やかに上方へ移動することができる。これにより、上側コンベアから下側コンベアへトレイを連続的に速やかに移動させることができるようになる。
【0017】
請求項5の発明は、請求項4の発明のトレイ下降装置において、トレイが下側コンベアのトレイ載置部上に載置された状態で、カムの回転によってトレイ支持部材のみが上方へ移動し、トレイ支持部材が上方へ移動した後に、トレイが下側コンベアによって搬送されるようにした。
【0018】
請求項5の発明を実施すると、下側コンベアのトレイ載置部上にトレイを載置した後のトレイ支持部材を、トレイに干渉させずに上方へ移動させることができる。また、トレイ載置部上に載置されたトレイは、トレイ支持部材が上方へ移動した後に下側コンベアによって速やかに搬送することができる。
【0019】
請求項6の発明は、請求項1〜5のうちのいずれかの発明のトレイ下降装置において、前記トレイ支持部材がトレイの両側に設けてあり、トレイの搬送方向下流側の部位には、搬送方向と直交する方向に延びる張出部が設けてあり、前記張出部をトレイ支持部材で支持し、さらにトレイ支持部材にフランジ部を設け、前記フランジ部でトレイの搬送方向上流側の部位を支持するようにした。
【0020】
請求項6の発明を実施すると、トレイの搬送方向の下流側の部位と上流側の部位とを支持することができ、トレイを確実に支持して上側コンベア側から下側コンベア側へ移動させることができるようになる。
【0021】
請求項7の発明は、請求項1〜6のうちのいずれかの発明のトレイ下降装置において、上側コンベア上において、下降可能なトレイの有無を検出するトレイ検出センサを設けた。
【0022】
請求項7の発明を実施すると、トレイ支持部材がトレイを載置可能な位置に配置されると同時にトレイをトレイ支持部材上に載置することができ、上側コンベア側から下側コンベア側へ、トレイを速やかに移動させることができるようになる。
【0023】
請求項8の発明は、請求項7の発明のトレイ下降装置において、前記トレイ検出センサがトレイを検出するまで、トレイ支持部材がトレイを支持可能な位置で停止するようにした。
【0024】
請求項8の発明を実施すると、上側コンベア上における下降可能なトレイの待機時間が解消され、上側コンベア側から下側コンベア側へ、トレイを速やかに移動させることができるようになる。
【発明の効果】
【0025】
本発明を実施すると、上側コンベア上におけるトレイの待機時間を削減することができ、トレイを上側コンベアから下側コンベアへ連続的に速やかに下降させることができるようになる。
【発明を実施するための最良の形態】
【0026】
図1は、本発明のトレイ下降装置2を備えたトレイ循環装置1の主要な構成の側面図である。図1に示すようにトレイ循環装置1は、上部コンベア4(上側コンベア)と下部コンベア5(下側コンベア)とが上下に配置され、両コンベアの図1で見て左側にトレイ下降装置2が配置され、右側にトレイ上昇装置3が配置されて構成されている。
【0027】
まず、全体のトレイ循環装置1の概要を説明し、次に本発明のトレイ下降装置2について詳述する。
トレイ循環装置1は、複数のトレイ6を上部コンベア4は矢印A方向へ搬送し、下部コンベア5は矢印B方向へ搬送する。トレイ上昇装置3付近の上部コンベア4上の場所L1には、図示しないストッパが設けてあり、トレイ6は、収容物13(搬送物)の収容が完了するまで場所L1で停止する。例えば、野菜等の食品や機械部品等が収容物13としてトレイ6内に収容される。収容物13がキュウリ等の野菜であれば、予め設定した許容範囲内の形状や大きさのもの(同程度のもの)を揃えて同一のトレイ6内に入れる。収容物13の収容(搭載)が完了したトレイ6は、上部コンベア4によって左側の場所L2まで搬送される。場所L2は、トレイ下降装置2の上部、即ちトレイ6が第一当接部11又は第二当接部12に当接する位置である。場所L2において、箱詰め作業者が、トレイ6から収容物13を取り出して箱詰めを行い、トレイ6は空にされる。なお、場所L2を、トレイ下降装置2の手前の上部コンベア4上に設定することもできる。その際には、場所L2にはトレイ6を停止させるストッパ(図示せず)を設ける。
【0028】
次に、本発明のトレイ下降装置2について説明する。トレイ下降装置2は、トレイ6を移動させる過程で状態が刻々と変化するので、主要な状態毎に各図を参照しながら構成を説明する。図2、図4、図6、図8、及び図10は、トレイ下降装置2の一部の記載を省略した斜視図である。図2はトレイ下降装置2にトレイ6が到達する直前の状態を示しており、図4はトレイ6がトレイ下降装置2に到達した状態を示しており、図6はトレイ6が下降可能な状態を示しており、図8はトレイ6を下降させる直前の状態を示しており、そして図10はトレイ6を下降させた状態を示している。
【0029】
空のトレイ6は、トレイ下降装置2が、図2、図4、図6、図8、及び図10に示す状態を経て上部コンベア4側から下部コンベア5(5a)側へと移される。以下では、トレイ下降装置2がトレイ6を受け入れ、トレイ6を上部コンベア4側から下部コンベア5(5a)側へ移す各過程毎に各図を参照しながら説明する。
【0030】
まず、トレイ下降装置2の構成を図2、図3(a)、図3(b)を参照しながら説明する。図3(a)は図2に示す状態のトレイ下降装置2の平面略図であり、図3(b)はその側面略図である。図2に示すように、トレイ下降装置2は、トレイ循環装置1の筐体を構成する側板1aに設けられている。図2では、トレイ下降装置2の構成を把握し易くするために、手前側の側板1aの記載をトレイ下降装置毎省略している。トレイ下降装置2は、下降手段と待機手段と下部コンベア5aとで構成されている。下降手段は、カム7、第一リンク8、第二リンク9、及び第一リンク8を駆動する駆動モータ14を有しており、待機手段は、第一当接部11、第二当接部12を備えたストッパ10で構成されている。また、下部コンベア5aは、後述する制御装置45で駆動が制御されており、矢印Bで示す搬送方向と直角の方向の長さが下部コンベア5の長さより短い。
【0031】
以下では、まず下降手段から説明し、続いて順に待機手段及び下部コンベア5aについて説明する。
図14(a)〜(d)は、各々下降手段であるカム7と待機手段であるストッパ10を描写した側面略図である。図2や図3(a)、図3(b)では、カム7の主要な構成部分が描写しきれないため、カム7の構成は、適宜、図14(a)〜(d)を参照して説明する。
【0032】
カム7の回転軸7a及び第一リンク8の回転軸8aは、側板1aに設けた図示しない軸受によって回転自在に装着されている。カム7及び第一リンク8は、側板1aに設けた軸受によって支持される回転軸7a及び8aを中心に回転することができるようになっている。
【0033】
図14(a)に示すように、カム7の形状は略円形であるが、その外周部分の一部に段15及び段16が形成されている。カム7の段15及び段16の部分は、その他の部位よりも半径方向外側へ突出している。その各突出量については後述する。カム7の円形部分と段15の間には傾斜部17が形成されており、両者はそれぞれ傾斜部17と滑らかに接続されている。また、段15と段16の間には傾斜部18が形成されており、両者はそれぞれ傾斜部18と滑らかに接続されている。さらに、カム7は、段16付近に設けた軸19で第二リンク9と回転自在に連結されている。詳細に図示はしていないが、カム7及び第二リンク9には、それぞれ軸受が設けてある。これらの軸受で軸19を介して、カム7と第二リンク9とが回転自在に接続されている。
【0034】
図3(b)に示すように、第一リンク8は、略台形形状を呈している。その大きい方の底辺近傍には、トレイ循環装置1の側板1aに設けた前述の回転軸8aを装着する軸受部が設けてある。また、第一リンク8の台形の小さい方の底辺近傍には、軸20で第二リンク9と連結されている。すなわち、第一リンク8と第二リンク9には、各々軸20を装着するための軸受部が設けてあり、軸20は、第一リンク8と第二リンク9とを回転自在に連結している。第一リンク8には、駆動モータ14の動力がベルト21を介して伝達され、第一リンク8は回転軸8aを中心に回転する。
【0035】
すなわち、カム7と第一リンク8とは、第二リンク9によって接続されているので、駆動モータ14によって第一リンク8が回転駆動されると、動力が第二リンク9を介してカム7にも伝達され、カム7も回転軸7aを中心に回転する。ここで、カム7には、段15及び段16が設けられている分だけ重心が回転中心7aから偏心するが、図示しないアシストリンクを設置することにより、カム7と第一リンク8とが円滑に回転することができるようになっている。
【0036】
駆動モータ14は、後述する制御装置45(図18)によって駆動が制御されている。ここで図18は、本発明のトレイ下降装置の制御装置45の信号系統図である。また、トレイ循環装置1の側板1aには、トレイ検出センサ22が設けてある。トレイ検出センサ22は、後述するトレイ6の識別符6d及び6eを検出し、トレイ6がストッパ10の第一当接部11又は第二当接部12に当接していることを検出する。トレイ検出センサ22が、トレイ6の第一当接部11又は第二当接部12への当接を検出すると、検出信号が前述の制御装置45に送られる。制御装置45による制御は後述する。
【0037】
図3(a)に示すように、第二リンク9には、トレイ6の搬送方向上流側(後側)に、トレイ循環装置1の筐体の内側へ延びる内向きフランジ9bが設けてある。内向きフランジ9bは、トレイ支持部9aの一部を構成している。
【0038】
ここでトレイ6の構成を、図15を参照しながら説明する。
図15は、トレイ6の斜視図である。トレイ6には、矢印Aで示す搬送方向と直角の方向に延びる張出部6aが設けてある。張出部6aは、トレイ6の搬送方向下流側の下部に設けられている。また、トレイ6の側壁6cには、ICチップ等の記録素子からなる識別符6d及び6eが設けてある。トレイ6が第一当接部11に当接しているときには、トレイ6の識別符6dがトレイ検出センサ22と対向し、トレイ6が第二当接部12に当接しているときには、識別符6eがトレイ検出センサ22と対向するように識別符6d及び6eは、トレイ6の側壁6cに配置されている。識別符6dと6eは、距離Lだけ隔てられている。なお、描写の都合上、紙面の手前側の壁面6cのみに識別符6dと6eを描写しているが、紙面の向こう側の壁面6cにも同様に識別符6dと6eが設けられている。
【0039】
さらにトレイ6の側板6cの中央部分には上方が開口した切欠部6bが設けてある。この切欠部6bを設けることにより、図1に示す収容物13が、トレイ6内に依然として収容されているか否かを検出することができる。すなわち、場所L2におけるトレイ循環装置1のフランジ部1b上に検出センサ(例えば赤外線センサ等)を設置し、収容物13の有無が検出される。収容物13が検出された場合には、収容物13が検出されなくなるまでトレイ下降装置2によるトレイ6の下降は行わない。収容物13が検出されなくなったトレイ6は、上部コンベア4によって図1で見て左方(矢印Aの方向)へ搬送され、張出部6aが図2に示すストッパ10(待機手段)の第一当接部11に当接する。場所L2を、トレイ6がトレイ下降装置2の第二当接部12に当接する位置とした場合には、トレイ6は既にトレイ支持部材9a上に載置されており、収容物13が取り出された後、空のトレイ6は速やかに下降する。
【0040】
また、図2及び図3(b)に示すように、上部コンベア4には、トレイ6の搬送方向に延びるガイド部材41が設けてある。ガイド部材41は、左右両側の側板1a(フランジ部1b)に設けられており、その間隔はトレイ6の張出部6aの幅よりも若干大きく設定されている。よって、トレイ6(張出部6a)は、両側をガイド部材41にガイドされながら、搬送方向に真っ直ぐに搬送される。さらにガイド部材41には、上部フランジ41aが設けられている。この上部フランジ41aが、トレイ6の張出部6aに干渉し、トレイ6が上部コンベア4から外れず、確実にトレイ6を搬送することができるようになっている。図3(b)に示すように、下部コンベア5にも上部フランジ42aを備えたガイド部材42が設けられている。よって、下部コンベア5上を搬送される際にも、トレイ6が下部コンベア5から外れることはなく、確実にトレイ上昇装置3(図1)まで搬送することができる。なお、図3(a)では、他の部材の構成を明確に描写するためにガイド部材41及びガイド部材42の記載を省略している。
【0041】
次に待機手段であるストッパ10の構成を、図16を参照しながら説明する。図16(a)は、ストッパ10の分解斜視図であり、図16(b)は、ストッパ10の側面図である。図16(b)には、トレイ6(図1)の搬送方向を矢印Aで示してある。すなわち、トレイ6は右側から左側へ搬送され、図16(b)では、トレイ6(図1)が搬送される向きに合わせてストッパ10が描写されている。
【0042】
図16(a)に示すように、ストッパ10は、本体25に、補強板24、支軸26、軸27、及びカム当接部材37等の複数の部材が装着されて構成されている。このストッパ10は、軸受部材28によってトレイ循環装置1のフランジ部1bに固定される。
【0043】
以下、ストッパ10(待機手段)の構成を詳細に説明する。
本体25は、図16(a)、図16(b)に示すような形状を呈した一枚の板状物である。本体25の上流側端部は、直角に折り曲げられて第一当接部11が形成されている。よって、第一当接部11は、トレイ6を面(当接面)で受け止めることができる。また、本体25の下部には、水平姿勢の本体25と角度rを成す枝部23が、上流方向に分岐形成されている。この枝部23の先端部分(上流側端部)は、直角に折り曲げられて第二当接部12が形成されている。図16(b)で見て、本体25を角度rだけ反時計回りに回動させると、枝部23が水平姿勢になる。枝部23が水平姿勢になった際には、前述の第一当接部11と同様に、第二当接部12(トレイ6に対する当接面)もトレイ6(図1)の搬送方向と直角の方向を向き、トレイ6を面で受け止めることができるようになる。図16(b)に示すように、第二当接部12は、第一当接部11とトレイ6(図1)の搬送方向下流側に距離Lだけ隔てられている。図16(b)では、ストッパ10の構成を詳細に示すために、図15のトレイ6よりも拡大して描写しているが、図16(b)に示す距離Lは、図15に示すトレイ6の識別符6dと識別符6eの間の距離Lと同じである。
【0044】
角度rの大きさは、カム7の段15の突出量と相関関係がある。すなわち、後述するカム当接部材37に段15が当接し、段15によってカム当接部材37が押し上げられると、枝部23が水平姿勢になるように、ストッパ10は、支軸26(後述)を中心に角度rだけ回動するように設定されている。
【0045】
併せて述べるが、カム7の段16の突出量(突出高さ)は、段15の突出量よりも大きい。よって、カム当接部材37に段16が当接し、段16によってカム当接部材37が押し上げられると、ストッパ10は、角度rを超えてさらに回動し、トレイ6の張出部6aの第二当接部12への当接が解除され、トレイ6は第二リンク9と共に下降可能になる。
【0046】
図16(a)及び図16(b)に示すように、本体25と、本体25に対して直角に折り曲げて形成された第一当接部11とは、補強板24が溶着されて補強されている。補強板24は、本体25の上部に固着されている。補強板24が、本体25と第一当接部11の折り曲げ部分と干渉しないように、補強板24には切欠部24aが設けられている。
【0047】
第一当接部11には、上部コンベア4によって搬送されるトレイ6が、勢いよく衝突することがあるが、補強板24を設けることにより、第一当接部11はトレイ6が衝突しても変形及び損傷しないようになっている。一方、第二当接部12には、一旦第一当接部11に当接して勢いがなくなったトレイ6が当接するだけであれば、第一当接部11のように補強する必要はない。しかし、第一当接部11に当接することなく第二当接部12にトレイ6が当接することがあるのであれば、第一当接部11と同様に第二当接部12も補強しておくのが望ましい。補強部材が必要か否かは、ストッパ10の本体25及び枝部23の材質や、トレイ6の重量及び搬送速度を勘案して任意に選定すればよい。
【0048】
また、本体25には、その一部を折り曲げて回動規制部34が形成されている。回動規制部34は、本体25の上流側の端部付近であって、第一当接部11の折れ曲がり方向とは逆方向に延びるように形成されている。その回動規制部34の先端側であって、トレイ6(図1)の搬送方向の上流側の部分にはねじ穴34aが設けてある。ねじ穴34aにはばね固定ねじ35が途中までねじ込まれている。ばね固定ねじ35には、図16(b)に示すばね38の一端が係合している。組立てが完了したストッパ10をフランジ部1bに設置した際には、ばね38は、フランジ部1bに設けた長孔33を貫通し、その他端は、図示していないが側板1aに固定される。これによりストッパ10は、常時下方へ付勢されるようになっている。
【0049】
図16(a)に示すように、本体25には、支軸26を通す孔25aが、トレイ6(図1)の搬送方向下流側の端部に設けられている。支軸26には、順にねじ部26a、小径部26b、大径部26c、及び本体支持部26dが形成されている。孔25aには本体支持部26dが圧入され、支軸26と本体25とは一体に回動可能となっている。
【0050】
本体25の中央付近には、孔25aとは別に孔25bが設けてある。この孔25bには軸27が脱落不能に挿通される。また、軸27はカム当接部材37の孔37cに圧入される。カム当接部材37の孔37cに軸27を圧入させることにより、カム当接部材37と軸27とは一体に固着される。よって、カム当接部材37は、軸27を介して本体25に固着される。
【0051】
カム当接部材37は、軸27と一体に固着される内周部37aと、内周部37aの外周側(外縁)の外周部37bとを有している。外周部37bは、内周部37aに対して回転可能に装着されている。内周部37aに対して回転可能な外周部37bを設けたのは、カム当接部材37がカム7の段15及び段16で押し上げられる際の摩擦抵抗を低減するためである。このように構成されたストッパ10の支軸26を、予めトレイ循環装置1のフランジ部1bに固定した軸受部材28で回転可能に支持する。
【0052】
ストッパ10は、以上のようにして軸受部材28を介してフランジ部1bに回動可能に取り付けられる。また、図16(a)に示すように、フランジ部1bには、弾性部材36が固着されている。弾性部材36は、ストッパ10が時計回りに回動した際に、回動規制部34が当接する位置に設置されている。
【0053】
さらに、回動規制部34は、ばね38によって下向き(支軸26を中心に時計回りに回動する向き)に付勢されており、下方へ付勢される回動規制部34が弾性部材36に当接し、ストッパ10は、支軸26を中心にそれ以上は下方へ回動しないようになっている。また、ストッパ10はばね38によって時計回りに付勢されて、常時、回動規制部34が弾性部材36に当接している。弾性部材36は、例えば合成ゴムや天然ゴム等の素材で構成することができる。このようにしてストッパ10は、フランジ部1bに回動可能に設置される。
【0054】
以上、ストッパ10(待機手段)の構成を説明したが、ストッパ10は、カム当接部材37に、前述のカム7(下降手段)の段15及び段16が当接すると、ばね38の弾性力に抗して反時計回りに押し上げられて回動する。
【0055】
次に、下部コンベア5aの構成を図3(a)及び図3(b)を参照しながら説明する。なお、図3(a)の平面図では、下部コンベア5aを示すために、上部コンベア4の記載を一部省略している。
【0056】
図3(a)及び図3(b)に示すように、下部コンベア5aは、複数の従動ローラ50と一つの駆動ローラ51とで構成されている。図3(a)には5つの従動ローラ50を配置した例を示している。従動ローラ50は、トレイ6を載置するトレイ載置部50bを備えている。
【0057】
また、図3(a)及び図3(b)に示すように、各従動ローラ50には、小径部50cが設けてある。この小径部50cには、ベルト52を掛ける溝50aが二箇所に設けてある。この溝50aにはベルト52が掛けられ、ベルト52によって隣接する従動ローラ50との間で回転力が伝達されるようになっている。溝50aを、小径部50cに設けることにより、後述するトレイ載置部50bにトレイ6を載置した際に、トレイ6の下面をベルト52に触れさせずに済む。
【0058】
さらに、図3(b)で見て最も右側(すなわち、矢印Bで示す搬送方向の最も下流側)の従動ローラ50の右側(下流側)には、駆動ローラ51が設置されている。駆動ローラ51は、図示しない駆動モータ(例えば内蔵式)によって駆動されるが、制御装置45(図18)によって駆動が制御される。図3(a)に示すように、駆動ローラ51には溝51aが設けてあり、溝51aにはベルト52が掛けられ、隣接する従動ローラ50に動力を伝達することができるようになっている。
【0059】
従動ローラ50は、トレイ循環装置1の底部に立設した支持部材53に、回転可能に支持されている。また、駆動ローラ51は、トレイ循環装置1の側板1aに支持されている。すなわち、従動ローラ50の軸が支持部材53に固定されており、従動ローラ50は軸を中心に円滑に回転可能になっており、また、駆動ローラ51の軸が側板1aに固定されており、駆動ローラ51は軸を中心に円滑に回転可能になっている。
【0060】
従動ローラ50の長さは、駆動ローラ51の長さよりも短い。すなわち、二つの平行に配置された支持部材53の間隔は、両側板1aの間隔よりも狭い。よって、図2、図3(a)に示すように側板1aと支持部材53の間には空間54ができる。この空間54は第二リンク9が下降することができるように設けられたものである。
【0061】
下降した第二リンク9から従動ローラ50のトレイ載置部50b上にトレイ6が載置されると、カム7と第一リンク8の回転によって第二リンク9のみが空間54内を移動し、第二リンク9は、他のいずれの部材とも衝突することなく上昇することができる。詳しくは後述するが、その後、制御装置45(図18)からの制御信号を受けて駆動ローラ51が駆動され、従動ローラ50上に載置されたトレイ6が、下部コンベア5a側から下部コンベア5側へと移動する。下部コンベア5は、常時駆動されていても差し支えないが、図示しないセンサがトレイ6を検出したら駆動するように構成することもできる。
【0062】
次に、ストッパ10の動作を、前述の図2、図4、図6、図8、図10と、これらの状態の平面図及び側面図である図3、図5、図7、図9及び図11と、図12、図13、図14(a)〜(d)とを順次参照しながら以下で説明する。
【0063】
前述の図3(a)及び(b)は、トレイ循環装置1の上部コンベア4上のトレイ6が、まだトレイ下降装置2に到達しておらず、さらに下部コンベア5a上にトレイ6がない状態を示している。図3(b)に示す状態では、第二リンク9がトレイ6を載置可能な位置に配置されている。このとき、カム7の段15がストッパ10のカム当接部材37を押し上げ、ストッパ10は、枝部23が水平姿勢を呈した状態で停止(待機)している。
【0064】
トレイ検出センサ22は、トレイ6が第一当接部11に当接したことを識別符6dで検出し、第二当接部12に当接したことを識別符6eで検出する。ストッパ10が図3(b)に示す状態であれば、いずれトレイ6が第一当接部11に当接することなく第二当接部12に当接する。トレイ6が第二当接部12に当接すると、制御装置45(図18)は駆動モータ14を駆動させる。これにより、第二当接部12にトレイ6が当接するまでは、駆動モータ14は第一リンク8を駆動せず、その結果、第二リンク9は図3の回動位置で停止している。この状態でトレイ6が搬送されてくると、トレイ6の張出部6aは第二当接部12に当接(衝突)し、駆動モータ14が駆動されて、トレイ6は第二リンク9のトレイ支持部9a上に載置される。
【0065】
図5(a)は、トレイ6が既に第一当接部11に当接している(すなわち、トレイ6が場所L2に到達している)にも関わらず、第二リンク9がまだトレイ6を載置可能な位置に配置されていない状態のトレイ下降装置2の平面略図である。また、図5(b)は、その側面略図である。また、図14(a)は、この状態におけるカム7とストッパ10のみを描写した側面略図である。
【0066】
図4、図5(a)、図5(b)及び図14(a)に示すように、第二リンク9がまだ十分に上方へ移動していない状態でトレイ6がトレイ下降装置2に到達した場合には、カム7の段15がストッパ10のカム当接部材37を押し上げる位置まで到達していないので、ストッパ10の本体25は水平姿勢となり、トレイ6の張出部6aが第一当接部11に当接し、トレイ6は上部コンベア4の補助コロ40上で停止する。よって、トレイ6は、ストッパ10の第一当接部11に当接してそれ以上の進行が阻止され、落下するのを防止することができる。
【0067】
補助コロ40は、上部コンベア4のモータローラ43によって搬送されてきたトレイ6を、トレイ下降装置2まで導くものであり、それ自体には駆動源を備えていない。補助コロ40は、トレイ6の張出部6aを支持する。トレイ6の張出部6aが第一当接部11に当接した状態では、トレイ6の上流側端部(図5(b)で見て右側の端部)が上部コンベア4の一番下流側のモータローラ43で支持されており、トレイ6には、このモータローラ43によって下流側へ向かう推進力が付与されている。通常は、図5(b)に示すように、第二リンク9が上昇する前にトレイ6がトレイ下降装置2に到達する。そして、図5(b)に示す位置(すなわち場所L2)でトレイ6から収容物13が取り出され、トレイ6は空にされる。
【0068】
仮に、図3(b)に示すような、第二リンク9が待機している状態でトレイ6が搬送されてくると、トレイ6は第一当接部11で停止させられることなく、第二当接部12に当接して停止し、第二リンク9のトレイ支持部9a上に載置される。そして、トレイ6から収容物13が取り出されて、トレイ6は空にされる。本実施の形態では、図3(b)に示すような第二リンク9が最上位置にあるときの第一リンク8の回転角度位置を角度ゼロとし、反時計回りに角度が増加するように定義している。
【0069】
図7(a)は、トレイ6が第二当接部12に当接している際のトレイ下降装置2の平面略図であり、図7(b)は、その側面略図である。図14(b)は、この状態におけるカム7とストッパ10のみを描写した側面略図である。図7(b)、図14(b)に示すように、第二リンク9が上昇し、カム7の段15によってカム当接部材37が押し上げられると、トレイ6は、第二当接部12に当接した状態で第二リンク9のトレイ支持部9a上に載置される。
【0070】
トレイ6が、第二リンク9のトレイ支持部9a上に載置される際において、トレイ6の搬送方向の下流側部分(前側部分)は、張出部6aがトレイ支持部9aに支持される。一方、トレイ6の搬送方向の上流側部分(後側部分)は、図3(a)に示すトレイ支持部9aの内向きフランジ9b上に配置され、内向きフランジ9bで支持されるようになっている。従って、トレイ6の張出部6a(トレイ6の下流側部分)は、第二リンク9のトレイ支持部9aによって支持され、トレイ6の上流側端部は、内向きフランジ9bによって支持されるので、トレイ6は落下しない。
【0071】
トレイ支持部9a上にトレイ6が載置されると、駆動モータ14によって第一リンク8が回転駆動され、第一リンク8の回転に追従してカム7も回転し、ストッパ10のカム当接部材37は、段16によってさらに押し上げられる。図9(a)は、この状態のトレイ下降装置2の平面略図であり、図9(b)は、その側面略図である。また、図14(c)は、この状態におけるカム7とストッパ10のみを描写した側面略図である。図9(b)、図14(c)に示すように、トレイ6の第二当接部12への当接が解除されると、トレイ6は第二リンク9と共に移動(下降)可能になる。
【0072】
図7(b)ではトレイ6が第二リンク9上に載置され、図9(b)ではトレイ6を載置した第二リンク9の下降が開始される。図7(b)及び図9(b)に示すように、トレイ下降装置2には、次回下降されるトレイ6が搬送されてくる。その際、仮に第二リンク9の上昇が間に合わなければ、このトレイ6はストッパ10の第一当接部11に当接し、第二リンク9が上昇してくるまで待機する。この待機中(トレイ6の停止中)にトレイ6から収容物13を取り出すことができる。
【0073】
図11(a)は、トレイ6が第二リンク9と共に下降し、下部コンベア5a上に載置された状態のトレイ下降装置2の平面略図であり、図11(b)は、その側面略図である。また、図14(d)は、その状態のカム7とストッパ10のみを描写した側面略図である。図11(b)、図14(d)に示すように、カム7が回動し、第二リンク9が下方へ移動すると、ストッパ10のカム当接部材37に対するカム7の段16の押圧(押し上げ)が解除される。よって、ストッパ10は、ばね38の弾性力によって支軸26を中心に時計回りに回動し、回動規制部34が弾性部材36に当接して停止する。すなわち、本体25が水平姿勢となり、第一当接部11に対して、次回下降分のトレイ6の張出部6aが当接可能になる。
【0074】
図11(b)に示すような、トレイ6が下部コンベア5aのトレイ載置部50b上に載置された状態では、トレイ6(張出部6aを含む)は、図14(d)に示す隙間53だけリンク支持部9aから離れている。また、図示していないが、第二リンク9の内向きフランジ9bもトレイ6の下面から離れている。すなわち、第二リンク9は、トレイ6を下部コンベア5aのトレイ載置部50b上に載置してさらに隙間53に相当する距離だけ下降する。
【0075】
図11(b)に示す状態から、カム7及び第一リンク8がさらに進角した状態を、図12(a)、図12(b)に示す。図12(a)は、下部コンベア5a上にトレイ6を残し、第二リンク9のみが上昇する途中の状態のトレイ下降装置2の平面略図であり、図12(b)は、その側面略図である。図12(b)に示すように、カム7が図11(b)に示す状態よりさらに回転すると、第二リンク9のトレイ支持部9a(内向きフランジ9bを含む)は、トレイ6に再び当接することなく上昇し、トレイ6は下部コンベア5aのトレイ載置部50b上に残される。その後トレイ6は、張出部6aが第二リンク9及び第一リンク8に干渉されることなく矢印B方向へ搬送される。
【0076】
この状態が図13(a)及び図13(b)に示されている。図13(a)は、下部コンベア5a(トレイ下降装置2側)から下部コンベア5へトレイ6が移動した状態のトレイ下降装置2の平面略図であり、図13(b)は、その側面略図である。図13(b)に示すように、下部コンベア5へトレイ6が移動すると共に、上部コンベア4側では、カム7の段15がストッパ10のカム当接部材37を押し上げ、次回に下降されるトレイ6が第二リンク9上に載置されている。なお、図13(a)では、煩雑さを避けるために、第二リンク9上に載置された次回に下降されるトレイ6の描写を省略している。
【0077】
下部コンベア5a上にトレイ6を載置した直後に、トレイ6を下部コンベア5側へ矢印B方向に搬送すると、張出部6aが第二リンク9又は第一リンク8に衝突する。従って、張出部6aが第二リンク9及び第一リンク8に干渉しない位置まで第二リンク9が上昇する、又は第一リンク8が回転するまでは、下部コンベア5a上でトレイ6を待機させる。そして、トレイ6が矢印B方向に搬送されても第二リンク9及び第一リンク8に衝突しなくなる高さまで第二リンク9が上昇(第一リンク8が回転)すると、下部コンベア5aが駆動され、トレイ6は矢印B方向に搬送される。
【0078】
トレイ6が第二リンク9及び第一リンク8に衝突しなくなる高さとは、第二リンク9及び第一リンク8の下端が、少なくともトレイ6の張出部6aの上面より高い位置である。特に、第一リンク8は、回転角によって下端部の高さが著しく変動するので、例えば、図12(b)に示すような回転軸8aと軸20の高さが一致したときに、第一リンク8の下端が張出部6aよりも上になるように第一リンク8の形状を設定しておくと共に、第一リンク8の回転角度位置を検出する角度センサ8bを設け、この角度センサ8bが第一リンク8の回転角度が図12(b)に示すような位置になったことを検出したら、下部コンベア5aを駆動してトレイ6を矢印B方向に搬送すると、トレイ6は第一リンク8と第二リンク9のいずれにも衝突することなく下部コンベア5a側から下部コンベア5側へ移動させることができるようになる。
【0079】
トレイ下降装置2における、一つのトレイ6に着目した一連の動作は以上で終わりである。以降は、この動作が、下降させるトレイ6の数だけ繰り返される。なお、本実施の形態では、一回につき一つのトレイ6を下降させる例を示したが、第二リンク9のトレイ支持部9a上に複数のトレイ6を載置可能に、トレイ6や第二リンク9の寸法を設定してもよい。例えば、二つのトレイ6を同時にトレイ支持部9a上に配置してもよい。複数のトレイ6を同時に下降させる場合には、トレイ6の配置に対応した内向きフランジ9bを第二リンク9に適宜設け、トレイ6の前側(下流側)と後側(上流側)とを安定して支持できるようにする。
【0080】
以上では、待機手段としてのストッパ10の一連の動作は、下降手段の一部であるカム7の回転と連動している構成を例示した。このように構成すると、トレイ6の有無や第二リンク9(トレイ支持部9a)の位置に関わらず、ストッパ10の動作を制御するための特別な構成部材が不要になる。
【0081】
以上の動作を、図17に示す制御フロー図と、図18の制御装置45の信号系統図とを参照しながら説明する。図17に示すように、制御フローは、第一ステップ〜第四ステップの四つのステップからなる。また、トレイ下降装置2は、図18に示すような制御装置45を備えている。
【0082】
制御装置45は、演算機能を有するCPU45aと、各種の設定値を記憶することができるメモリ45bとを備えている。この制御装置45には、第一リンク8に設置した角度センサ8aと、上部コンベア4に設置したトレイ検出センサ22とから各々の検出信号が入力される。制御装置45は、角度センサ8aから入力された検出信号(値)と、メモリ45bに記憶した予め設定された値とを比較し、両者が一致した場合には、駆動モータ14による第一リンク8の駆動を停止させる。ここでは、メモリ45bには角度ゼロ値を記憶させておき、第二リンク9が最も高い位置にあるとき、すなわち、第一リンク8が角度ゼロになると、第一リンク8を停止させるようにする。もっとも、回転動作する第一リンク8には慣性力が作用しているので、この慣性力を勘案して、第二リンク9が最上位置で停止するように補正するのが好ましい。例えば、メモリ45bに記憶させる値はゼロであるが、角度センサ8aが角度350度を検出したら、駆動モータ14を停止させるようにして、第二リンク9がちょうど最上位置(角度ゼロ又は角度360度)で停止するように配慮する。
【0083】
次に、図17を参照して、各ステップ毎に説明する。
第一ステップでは、図1に示す上部コンベア4上の場所L1に配置された空のトレイ6に収容物13を収容し、収容物13を収容したトレイ6を場所L2(図1)まで搬送し、場所L2において収容物13を回収し、トレイ6内を空にする。以上の動作は、トレイ循環装置1の上部コンベア4上で全て行われる。
【0084】
次に、第二ステップでは、第一リンク8に設けた角度センサ8bによって、第一リンク8の角度位置(360度の範囲)が検出され、検出信号(検出値)が図18に示す制御装置45に入力される。仮に角度ゼロが検出されたら、第三ステップへ移行する。検出した角度がゼロでなければ、制御装置45は駆動モータ14へ制御信号を送らず、第一リンク8は回転を続行する。
【0085】
第二ステップで角度ゼロが検出されると、第三ステップに移行する。第三ステップでは、トレイ検出センサ22によってトレイ6が検出されたか否かを判定する。トレイ6が検出されなければ、制御装置45によって駆動モータ14の駆動が停止させられ、第一リンク8の回転が停止し、第二リンク9は最上位置で停止し待機する。また、同時に図示しないセンサによってトレイ6内に収容物13があるか否かが検出され、トレイ6が空になるまで第二リンク9は最上位置で停止し続ける。仮に第一リンク8が回転し続けて第二リンク9が下方に移動し、その間にトレイ6が空になると、第二リンク9が再度上昇してくるまでに要する時間が、トレイ6の待機時間となってしまい、トレイ6の速やかな搬送作業に若干の影響を及ぼす。よって、第二リンク9がトレイ6を載置せずに空回りしないように、制御装置45の制御信号によって、駆動モータ14が制御され、第二リンク9が最上位置で停止するようにする。そして、トレイ検出センサ22がトレイ6を検出すると、制御装置45は駆動モータ14を駆動させ、第一リンク8を回転させ、第四ステップへ移行する。
【0086】
仮に、第二ステップで角度センサ8aが角度ゼロを検出し、さらに第三ステップでトレイ検出センサ22がトレイ6の存在を検出すると、第一リンク8は停止することなく回転し続ける。ここで、第二リンク9のトレイ支持部9a上にトレイ6が載置され易くするために、トレイ6が第二当接部12に当接した際に、第一リンク8の回転速度を一時的に遅くする、又は、第一リンク8を暫時停止させるようにしてもよい。この一連の動作は、制御装置45のメモリ45bに予め記憶させておき、制御装置45によってメモリ45bに記憶された通りに駆動モータ14の駆動を制御するのが好ましい。
【0087】
また、トレイ6が第一当接部11に当接するより前に、第二リンク9がトレイ6を載置することができる位置(角度ゼロの位置)に配置されると、トレイ6は第一当接部11に当接することなく第二当接部12に当接する。
【0088】
そして、トレイ6内が空になると、第四ステップにおいて、トレイ6は、第二リンク9と共に下方へ移動する。第二リンク9の最下位置(角度180度の位置)では、第二リンク9のトレイ支持部9aが下部コンベア5aのトレイ載置部50bよりも下方に位置するため、トレイ6は下部コンベア5aのトレイ載置部50b上に載置される。そして、第二リンク9のみが空間54(図3(a))内を通過して最下位置から上昇し、第二リンク9が所定の高さ(第二リンク9の下面がトレイ6の張出部6aよりも上になる高さ)になったこと(すなわち、第一リンク8が予め設定した所定の角度になったこと)が角度センサ8aによって検出されると、制御装置45によって下部コンベア5a(駆動ローラ51)が駆動され、下部コンベア5a上のトレイ6は矢印B方向に搬送される。そして、トレイ6は下部コンベア5a側から下部コンベア5側へ移動し、下部コンベア5によって図1に示すトレイ上昇装置3まで搬送される。その後、空のトレイ6は、トレイ上昇装置3によって上部コンベア4側へ移動させられ、再利用される。そして、制御フローとしては、第一ステップへ戻る。
【0089】
本発明のトレイ下降装置2は、例えば、図1に示すトレイ循環装置1のような循環システムの一部として使用することができるが、トレイ循環装置1に関わらず、上側から下側へトレイを移動させる用途であれば、どのような装置にも採用することができる。
【0090】
上述の例では、トレイ6が第一当接部11又は第二当接部12に当接したことを検出するために、トレイ6に識別符6d及び6eを設けた。しかし、識別符6d及び6eは、以下のように使用することもできる。すなわち、各トレイ6毎に固有の識別番号情報を識別符6d及び6eに記録しておくと、トレイ検出センサ22が識別番号情報を読み取り、今何番目のトレイ6が下降されようとしているかを把握することができる。また、搬送(下降)されるトレイ6の積算個数が予め決まっている場合には、トレイ下降装置2が残り何個のトレイ6を下降させればよいかを制御装置45で管理することができる。すなわち、制御装置45のCPU45aによる演算機能と、搬送するトレイ6の数を記録したメモリ45bとを利用してカウンタを構成し、カウンタがゼロになれば自動的にトレイ循環装置1(又はトレイ下降装置2)を停止させるようにすることもできる。
【0091】
本実施の形態では、下降可能なトレイ6の有無を検出するセンサとしてトレイ検出センサ22を設け、さらにトレイ6に識別符6d及び6eを設ける例を示したが、トレイ検出センサ22はトレイ6が第一当接部11に当接したことのみを検出し、またトレイ6には識別符6d及び6eを設けず、代わりに、上部コンベア4側に別のトレイ検出センサを設けて、トレイ6が第二当接部12に当接したことを検出するようにしてもよい。
【0092】
上記では特に断らなかったが、上部コンベア4は、前工程の作業が滞った場合には、最前(最下流側)のトレイ6がストッパ10の第一当接部11に当接して停止させられ、後続のトレイ6は、前のトレイ6に衝突して停止する。よって、そのとき上部コンベア4の搬送ローラ(モータローラ)は空回りする。
【図面の簡単な説明】
【0093】
【図1】本発明のトレイ下降装置を備えたトレイ循環装置の主要な構成の側面略図である。
【図2】トレイ下降装置の一部の記載を省略した部分斜視図である。
【図3】(a)はトレイ下降装置の平面略図である。(b)はトレイ下降装置の側面略図である。
【図4】トレイが第一当接部に当接している状態のトレイ下降装置の部分斜視図である。
【図5】(a)は、図4の状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図6】トレイが第二当接部に当接している状態のトレイ下降装置の部分斜視図である。
【図7】(a)は、図6の状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図8】トレイへの第二当接部の当接が解除された状態のトレイ下降装置の部分斜視図である。
【図9】(a)は、図8の状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図10】トレイがリンクから下部コンベアへ移動した直後の状態のトレイ下降装置の部分斜視図である。
【図11】(a)は、トレイがリンクから下部コンベアに移された直後のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図12】(a)は、リンクがトレイを下部コンベア上に残して上方へ移動する途中のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図13】(a)は、トレイ下降装置側から下部コンベアへトレイが移動した状態のトレイ下降装置の平面略図である。(b)は、その側面略図である。
【図14】(a)は、ストッパ(待機手段)の第一当接部にトレイが当接している状態の側面略図である。(b)は、カムによって第一当接部へのトレイの当接が解除された状態の側面略図である。(c)は、カムによって第二当接部へのトレイの当接が解除された状態の側面略図である。(d)は、カムによってトレイ支持部材が最下位置に移動した状態の側面略図である。
【図15】トレイの斜視図である。
【図16】(a)は、ストッパの分解斜視図である。(b)は、ストッパの側面図である。
【図17】本発明のトレイ下降装置の制御フロー図である。
【図18】本発明のトレイ下降装置の制御装置の信号系統図である。
【符号の説明】
【0094】
1 トレイ循環装置
1a 側板
1b フランジ部
2 トレイ下降装置
3 トレイ上昇装置
4 上部コンベア(上側コンベア)
5、5a 下部コンベア(下側コンベア)
6 トレイ
6a 張出部
7 第一カム(下降手段)
8 第二カム(下降手段)
8a 角度センサ
9 リンク(下降手段)
9a トレイ支持部
10 ストッパ(待機手段)
11 第一当接部
12 第二当接部
15、16 段
17、18 傾斜部
22 トレイ検出センサ
25 ストッパの本体
26 ストッパの支軸
34 ストッパの回転規制部材
37 カム当接部材
45 制御装置
【特許請求の範囲】
【請求項1】
上側コンベアと下側コンベアとを備えており、前記上側コンベア及び下側コンベアが複数のトレイを連続的に搬送可能であるコンベアシステムにおいて、トレイを上側コンベア上で待機させる待機手段と、上側コンベアから下側コンベアへトレイを下降させる下降手段とを備えており、
前記待機手段は、次回下降分のトレイのうちの搬送方向の最も下流側にあるトレイを衝突させる第一当接部を有しており、
前記下降手段にはトレイ支持部材とカムとを有しており、前記トレイ支持部材はカムの回転と連動して上側コンベアと下側コンベアの間を往復移動し、前記カムは待機手段の第一当接部をリフトさせることができ、
前記カムが第一当接部をリフトさせると、トレイの第一当接部への当接が解除され且つトレイがトレイ支持部材上に載置されることを特徴とするトレイ下降装置。
【請求項2】
カムが第一当接部をリフトさせた際に、トレイをトレイ支持部材上で停止させる第二当接部を設けたことを特徴とする請求項1に記載のトレイ下降装置。
【請求項3】
前記第二当接部を待機手段に設け、カムが第一当接部をトレイから外す回転位置からさらに回転すると、第二当接部がリフトされてトレイとの当接が解除され、トレイ支持部材上のトレイがトレイ支持部材と共に下方へ移動可能になることを特徴とする請求項2に記載のトレイ下降装置。
【請求項4】
下側コンベアには、前記下降手段と干渉しない位置にトレイ載置部が設けてあり、
カムの回転によって前記トレイ支持部材が少なくとも最下位置に移動したときには、トレイ支持部材が下側コンベアのトレイ載置部よりも下になることを特徴とする請求項1〜3のうちのいずれかに記載のトレイ下降装置。
【請求項5】
トレイが下側コンベアのトレイ載置部上に載置された状態で、カムの回転によってトレイ支持部材のみが上方へ移動し、
トレイ支持部材が上方へ移動した後に、トレイが下側コンベアによって搬送されることを特徴とする請求項4に記載のトレイ下降装置。
【請求項6】
前記トレイ支持部材がトレイの両側に設けてあり、
トレイの搬送方向下流側の部位には、搬送方向と直交する方向に延びる張出部が設けてあり、前記張出部をトレイ支持部材で支持し、さらにトレイ支持部材にフランジ部を設け、前記フランジ部でトレイの搬送方向上流側の部位を支持することを特徴とする請求項1〜5のうちのいずれかに記載のトレイ下降装置。
【請求項7】
上側コンベア上において、下降可能なトレイの有無を検出するトレイ検出センサを設けたことを特徴とする請求項1〜6のうちのいずれかに記載のトレイ下降装置。
【請求項8】
前記トレイ検出センサがトレイを検出するまで、トレイ支持部材がトレイを支持可能な位置で停止するようにしたことを特徴とする請求項7に記載のトレイ下降装置。
【請求項1】
上側コンベアと下側コンベアとを備えており、前記上側コンベア及び下側コンベアが複数のトレイを連続的に搬送可能であるコンベアシステムにおいて、トレイを上側コンベア上で待機させる待機手段と、上側コンベアから下側コンベアへトレイを下降させる下降手段とを備えており、
前記待機手段は、次回下降分のトレイのうちの搬送方向の最も下流側にあるトレイを衝突させる第一当接部を有しており、
前記下降手段にはトレイ支持部材とカムとを有しており、前記トレイ支持部材はカムの回転と連動して上側コンベアと下側コンベアの間を往復移動し、前記カムは待機手段の第一当接部をリフトさせることができ、
前記カムが第一当接部をリフトさせると、トレイの第一当接部への当接が解除され且つトレイがトレイ支持部材上に載置されることを特徴とするトレイ下降装置。
【請求項2】
カムが第一当接部をリフトさせた際に、トレイをトレイ支持部材上で停止させる第二当接部を設けたことを特徴とする請求項1に記載のトレイ下降装置。
【請求項3】
前記第二当接部を待機手段に設け、カムが第一当接部をトレイから外す回転位置からさらに回転すると、第二当接部がリフトされてトレイとの当接が解除され、トレイ支持部材上のトレイがトレイ支持部材と共に下方へ移動可能になることを特徴とする請求項2に記載のトレイ下降装置。
【請求項4】
下側コンベアには、前記下降手段と干渉しない位置にトレイ載置部が設けてあり、
カムの回転によって前記トレイ支持部材が少なくとも最下位置に移動したときには、トレイ支持部材が下側コンベアのトレイ載置部よりも下になることを特徴とする請求項1〜3のうちのいずれかに記載のトレイ下降装置。
【請求項5】
トレイが下側コンベアのトレイ載置部上に載置された状態で、カムの回転によってトレイ支持部材のみが上方へ移動し、
トレイ支持部材が上方へ移動した後に、トレイが下側コンベアによって搬送されることを特徴とする請求項4に記載のトレイ下降装置。
【請求項6】
前記トレイ支持部材がトレイの両側に設けてあり、
トレイの搬送方向下流側の部位には、搬送方向と直交する方向に延びる張出部が設けてあり、前記張出部をトレイ支持部材で支持し、さらにトレイ支持部材にフランジ部を設け、前記フランジ部でトレイの搬送方向上流側の部位を支持することを特徴とする請求項1〜5のうちのいずれかに記載のトレイ下降装置。
【請求項7】
上側コンベア上において、下降可能なトレイの有無を検出するトレイ検出センサを設けたことを特徴とする請求項1〜6のうちのいずれかに記載のトレイ下降装置。
【請求項8】
前記トレイ検出センサがトレイを検出するまで、トレイ支持部材がトレイを支持可能な位置で停止するようにしたことを特徴とする請求項7に記載のトレイ下降装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2007−230705(P2007−230705A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−53401(P2006−53401)
【出願日】平成18年2月28日(2006.2.28)
【出願人】(592026819)伊東電機株式会社 (71)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年2月28日(2006.2.28)
【出願人】(592026819)伊東電機株式会社 (71)
【Fターム(参考)】
[ Back to top ]