
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種半導体基板に形成されたトレンチの深さを測定するトレンチ深さ測定装置、特に高アスペクト比のトレンチの深さを高精度で測定できるトレンチ深さ測定装置に関するものである。
【背景技術】
【0002】
半導体デバイスの製造プロセスにおいては、トレンチアイソレーションやトレンチ加工を利用した各種デバイスが開発されている。例えば、高耐圧MOSFETとして、トレンチゲート構造を有するMOSFETが開発されている。また、CMOSセンサやCCDセンサ等の撮像素子においても、各受光素子を分離するようにトレンチが形成され、隣接する画素間のクロストークが防止されている。一方、トレンチの深さはデバイスの性能や製造の歩留りに強い影響を与え、例えば、CMOSセンサにおいては、トレンチの深さが不十分な場合、隣接する画素間の電荷の漏洩が大きくなり、撮像される画像品質に悪影響を及ぼすおそれがある。また、パワーデバイスにおいても、トレンチの深さが不十分な場合、所定の耐電圧性能が得られない場合がある。さらに、半導体デバイスの微細化に伴い、高アスペクト比のトレンチが広く利用されている。従って、半導体デバイスの製造プロセスにおいては、高アスペクト比のトレンチの深さを高精度に測定できるトレンチ深さ測定装置の開発が強く要請されている。
【0003】
トレンチの深さを測定する測定装置として、共焦点光学系を利用した測定装置が既知である(例えば、特許文献1参照)。この既知のトレンチ深さ測定装置では、トレンチが形成されている基板を保持するステージと対物レンズとの間の距離を変えながらレーザビームにより基板表面を2次元走査し、基板表面からの反射光及びトレンチの底面からの反射光を光検出器により検出している。そして、トレンチ周囲の基板表面からの反射光の強度が最大となる対物レンズの光軸方向の位置とトレンチの底部からの反射光の強度が最大となる対物レンズの光軸方向の位置を特定し、これら2つの位置間の距離を求め、トレンチの深さが測定されている。
【特許文献1】特開2003−218095号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述した既知の測定装置では、照明ビームの瞳パターンが円形であるため、高アスペクト比のトレンチの深さを測定しようとする場合、トレンチに入射する照明ビームの大部分がトレンチの端縁で遮光されてしまい、トレンチの底面に僅かな照明光しか入射しない問題があった。すなわち、CMOSセンサやパワーデバイスに形成されているトレンチの幅はサブミクロンのレベルである。よって、瞳のパターンが円形の照明ビームを用いたのでは、照明光がトレンチの周辺の試料表面により遮光されてしまい、トレンチの内部に進入できず、トレンチの底面からの反射光が微弱すぎる問題があった。このため、光検出器からの出力信号の信号レベルが低すぎ、精度的に問題が生じていた。この問題を解決する方法として、開口数の小さい対物レンズを用いて底面に入射する照明光量を増加させることが考えられる。しかしながら、開口数の小さい対物レンズを用いた場合分解能が低下する不具合が生じてしまう。例えば、CMOSセンサに形成されているトレンチの深さを測定する場合、深さ方向に0.1μm程度の分解能が要求されるため、開口数の小さい対物レンズを用いたのでは、光軸方向の分解能が低すぎ、深さ測定の要求に対応できない不具合が生じてしまう。
【0005】
また、従来の共焦点型の深さ測定装置では、対物レンズの光軸方向の位置を変えながら、レーザビームによりトレンチを含む試料表面を2次元走査しているため、2次元走査に相当な時間を必要とし、スループットが低下する問題点があった。すなわち、従来のトレンチ深さ測定装置では、対物レンズの光軸方向の位置を変えながら試料表面を2次元走査しているため2次元走査に相当な時間が必要であり、1つのトレンチの深さを測定するのに長時間かかり、スループットの点においても問題があった。
【0006】
さらに、トレンチの深さを高分解能で測定するには、短波長の測定光を用いることが想定される。一方、紫外域や深紫外(DUV)のレーザ光を発生するレーザ光源の多くは、パルス発振型であるため、スペックルパターンの影響を除去ないし軽減するため複数のレーザパルスを放出させてデータを取得し、積分作用によりスペックルパターンの影響を低減する必要がある。このため、深さ測定に必要なZ軸スキャン中における対物レンズ又は試料ステージの移動速度を相当遅く設定しなければならない。よって、試料表面を2次元走査するのでは、測定のスループットが相当遅くなる問題が発生してしまう。この場合、試料表面の2次元走査を行わずZ軸スキャンだけを行うことが想定される。しかしながら、照明ビームの瞳パターンが円形の場合、トレンチの底面だけしか照明されないため、トレンチの底面の光軸方向の位置を検出するためのZ軸スキャンとトレンチ周囲の試料表面の光軸方向の位置を検出するためのZ軸スキャンの2回のZ軸スキャンが必要であり、依然としてスループットが低下する問題があった。従って、紫外域や深紫外(DUV)のレーザ光を用いても相当高いスループットが得られるトレンチ深さ測定装置の開発も強く要請されている。
【0007】
本発明の目的は、高アスペクト比のトレンチの深さを高精度で測定できるトレンチ深さ測定装置を実現することにある。
さらに、本発明の別の目的は、高アスペクト比のトレンチの深さを高いスループットで測定できるトレンチ深さ測定装置を提供することにある。
さらに、本発明の別の目的は、トレンチ幅が照明光の波長と同程度のトレンチの深さを測定できるトレンチ深さ測定装置を実現することにある。
【課題を解決するための手段】
【0008】
本発明によるトレンチ深さ測定装置は、試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具えることを特徴とする。
【0009】
本発明では、試料に形成されたトレンチの長手方向と平行に延在するライン状の瞳パターンを形成し、ライン状の瞳パターンを対物レンズを介して試料表面に結像しているので、試料表面上にはトレンチと直交するライン状の照明エリアが形成される。この結果、試料表面で遮光され深さ測定に寄与しない照明光を大幅に減らすことができる。さらに、開口数の大きな対物レンズ、例えば開口数が0.80程度の対物レンズを用いて照明することができ、高精度なトレンチの深さ測定が可能になる。しかも、トレンチの周辺で遮光される照明光の光量が大幅に減少するので、大出力の光源を用いることなく、光検出手段から安定した信号レベルの出力信号を得ることができる。
【0010】
さらに、試料表面上にトレンチと交差するように形成されるライン状の照明エリアは、トレンチの内部及びトレンチ周囲の試料表面の両方を同時に照明することができ、1回のZ軸スキャンを行うだけでトレンチの底面及びトレンチ周囲の試料表面の光軸方向の位置を検出することが可能である。この結果、測定のスループットが大幅に改善される利点が達成される。特に、高い分解能の測定を行うには、短波長の照明ビームを発生するレーザ光源を用いることが望ましい。しかしながら、紫外域や深紫外域(DUV)のレーザビームを放出するエキシマレーザの多くはパルス発振型であるため、スペックルパターンによる影響を低減するためには、照明光の位相分布を変調しながら複数の画像を撮像して積算する必要がある。この場合、試料表面を2次元走査する測定装置では、2次元走査自体に相当な時間が必要であるため、スループットが大幅に低下してしまう。また、瞳パターンが円形の照明ビームを用いる場合、トレンチの底面に焦点を合せてZ軸スキャンを行ったのでは、試料表面の光軸方向の位置が検出されないため、試料表面の位置検出のためのZ軸スキャンが別途必要であり、少なくとも2回のZ軸スキャンが必要である。よって、パルス発振型のエキシマレーザを用いて照明ビームを発生させる場合、スループットが一層低下する不具合が発生する。これに対して、本発明では、トレンチの内部及び周辺の試料表面の両方を同時に照明しているので、パルス発振型のエキシマレーザを用いても十分に対応できるトレンチ深さ測定装置が実現される。
【0011】
本発明による別のトレンチ深さ測定装置は、試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
直線偏光した照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具え、
前記試料表面に入射する照明ビームを構成する直線偏光した光の電界ベクトルの振動方向は、トレンチの長手方向に対してほぼ平行に設定されることを特徴とする。
【0012】
照明光がトレンチの内部に進入する際、トレンチの側壁で反射し或いは反射を繰り返してトレンチの底面に入射する。また、トレンチの底面で反射した反射光も、トレンチの側壁で反射しトレンチから出射する。従って、トレンチの側壁に対する照明光の反射率は、トレンチにおける光損失と密接に関係する。そこで、照明光の偏光状態と反射率との関係について検討した結果、波長が193nmの照明光の場合、比較的大きな入射角において、S偏光の反射率がP偏光の反射率よりも相当高いことが判明した。しかも、S偏光した光の場合、入射角が60°を超える範囲において80%以上の反射率が得られることも確認された。このデータを、トレンチに適用すれば、直線偏光した照明光の電界ベクトルの振動方向をトレンチの長手方向と平行になるように設定することによりトレンチにおける光損失が相当減少する。この検討結果によれば、トレンチの幅が照明光の波長に等しい場合であってもトレンチ底面から十分な光量の反射光が発生することになる。この検討結果に基づき、本発明では、照明光として直線偏光した光を用い、その電界ベクトルの方向はトレンチの長手方向と平行になるように設定する。これにより、照明光源として波長が193nmのレーザ光を発生するArFエキシマレーザを用い、レーザ光の電界ベクトルをトレンチの長手方向と平行に設定することにより、トレンチ幅が0.2μm程度のトレンチの深さを高精度に測定することが可能になる。すなわち、照明光源としてArFエキシマレーザを用いると共に開口数の大きな対物レンズを用いることにより、照明光の波長にほぼ等しい開口幅のトレンチであっても、その深さを高精度に測定することができる。
【発明の効果】
【0013】
本発明では、光源と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、ライン状の瞳パターンを対物レンズを介して試料表面上に結像しているので、試料表面上にはトレンチと直交する方向に延在するライン状の照明エリアが形成される。この結果、試料表面で遮光され深さ測定に寄与しない照明光を大幅に減らすことができ、高精度なトレンチの深さ測定が可能になる。さらに、試料表面上に形成されるライン状の照明エリアはトレンチ及びその周囲の試料表面の両方を照明するので、1回のZ軸スキャンを行うだけでトレンチの底部及びトレンチ周囲の試料表面の光軸方向の位置を検出することができ、測定のスループットが大幅に改善される。
さらに、ライン状の瞳パターンを形成すると共に照明光の電界ベクトルの方向をトレンチの長手方向と平行に設定すれば、トレンチ幅が照明光の波長に等しいトレンチであっても、その深さを高精度に測定することができる。
【図面の簡単な説明】
【0014】
【図1】本発明によるトレンチ深さ測定装置の基本構成を示す図である。
【図2】照明ビームの瞳パターン、対物レンズ及び試料に形成される像の関係を示す図である。
【図3】本発明による照明方法と従来の照明方法とを対比した図である。
【図4】Z軸スキャン中のステージの位置と光検出手段から出力される出力信号の輝度値との関係を示すグラフである。
【図5】信号処理装置の一例を示す図である。
【図6】本発明によるトレンチ深さ測定装置の変形例を示す図である。
【図7】直線偏光した照明光の電界ベクトルの方向に対するシィミュレーション結果を説明する図である。
【図8】本発明によるトレンチ深さ測定装置の別の変形例を示す図である。
【図9】本発明によるトレンチ深さ測定方法のアルゴリズムを示す図である。
【図10】本発明による共焦点顕微鏡の一例を示す図である。
【発明を実施するための形態】
【0015】
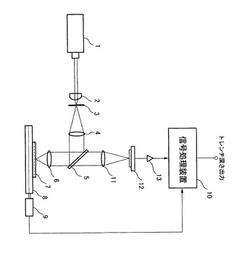
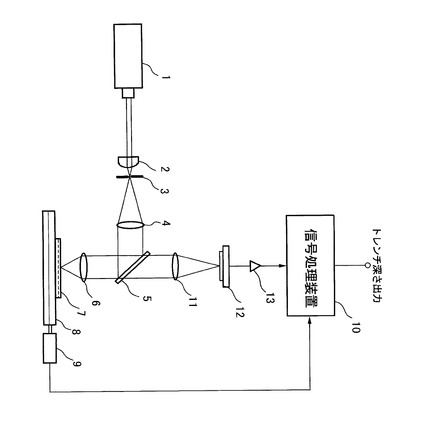
図1は本発明によるトレンチ深さ測定装置の基本構成を示す図である。本発明では、ライン状の照明ビームにより試料表面を照明する照明光学系を用いてトレンチの深さを測定する。光源1から照明ビームを放出する。光源として、水銀ランプ等のランプを用いることができ、或いは、直線偏光した照明光を放出する半導体レーザやHe-Neレーザ等の連続発振型のレーザ又はエキシマレーザ等のパルス発振型のレーザを用いることができる。また、照明光の波長として、各種の波長域の光を用いることができ、紫外域又は深紫外域(DUV)の波長の照明光を用いることができる。光源1から出射した照明ビームは、シリンドリカルレンズ2に入射する。シリンドリカルレンズ2は、紙面内方向にだけ集束性を有し、入射した照明ビームをライン状の照明ビームに変換する。ライン状照明ビームの集束点に、スリット手段3を配置する。スリット手段3は、紙面と直交する方向に延在するスリット状の開口部を有し、そのスリット開口の幅は例えば10μmとする。ライン状の照明ビームは、スリット手段3のスリット開口を通過し、集束性レンズ4を経てビームスプリッタ5に入射する。集束性レンズ4は、入射したライン状の照明ビームに対して、スリット開口の延在方向(紙面と直交する方向)についてはビームを集束するように作用し、スリット開口の延在方向と直交する方向(紙面内方向)については発散性ビームが光軸に平行な平行ビームとなるように作用する。尚、ビームスプリッタ5は、照明光源から試料に向かう照明ビームと試料からの反射光とを分離する作用を果たす。
【0016】
ビームスプリッタ5で反射したライン状の照明ビームは、対物レンズ6に入射する。本発明では、光源1と対物レンズ6との間に照明ビームの瞳が形成され、瞳位置にトレンチの長手方向と平行なライン状の瞳パターンが形成される。そして、対物レンズ6は、ライン状の瞳パターンを試料7のトレンチが形成されていく表面上に結像し、トレンチと交差するライン状の照明エリアを形成する。本例では、高い分解能を得るため、開口数の大きな対物レンズを用い、例えば開口数が0.9程度の対物レンズを用いることができる。トレンチが形成されている試料として、例えばCMOSセンサが製造されるシリコン基板やパワーデバイスが形成される各種半導体基板が用いられる。尚、光源1から対物レンズ6までの光路中に含まれる光学素子は、試料表面をライン状の照明ビームで照明する照明光学系を構成する。
【0017】
後述するように、深さ測定されるべきトレンチは、紙面内に延在し、ライン状の照明エリアはトレンチと直交する方向(紙面と直交する方向)に延在するものとする。すなわち、ライン状の照明エリアは、深さ測定されるべきトレンチと交差するように、本例ではトレンチの長手方向と直交するように形成される。従って、ライン状照明ビームの一部は、トレンチの内部に進行し、トレンチの底部で反射し、その反射光は対物レンズ6により集光される。また、ライン状照明ビームの残りの部分は、トレンチが形成される試料表面に入射し、試料表面で反射し、その反射光も対物レンズ6により集光される。このように、本発明では、ライン状の照明ビームを用い、トレンチの内部及びトレンチが形成される試料表面の両方を同時に照明する。
【0018】
試料7はステージ8上に配置する。ステージ8は、対物レンズ6の光軸と直交するX−Y面内で自在に移動することができると共に、対物レンズの光軸方向であるZ方向にも移動する。ステージをX−Y面で移動させて位置合せを行い、測定すべきトレンチを対物レンズの視野内に位置決めする。また、ステージ8の光軸方向の移動により試料7と対物レンズ6との間の相対的距離が変化し、Z軸スキャンが行われる。尚、Z軸スキャン手段として、ステージ移動だけでなく、対物レンズにサーボモータを装着し、ステージを静止させ、対物レンズを光軸方向に移動させてZ軸スキャンを行うことも可能である。
【0019】
ステージ8には、Z軸方向の位置を検出する位置センサ9を連結する。センサ手段である位置センサ9は、Z軸スキャン中にステージの光軸方向の位置を検出し、検出した位置情報を信号処理装置10に出力する。すなわち、位置センサ9により検出された位置情報は、Z軸スキャン中における対物レンズに対する試料表面及びトレンチ底部の相対位置情報ないし相対距離情報として利用し、対物レンズの焦点が試料表面及びトレンチの底部に位置した時の対物レンズと試料との間の位置関係を特定する。
【0020】
試料7からの反射光、すなわちトレンチの底部からの反射光及びトレンチ周囲の試料表面からの反射光は、対物レンズにより集光され、ビームスプリッタ5及び結像レンズ11を経て光検出手段12に入射する。光検出手段として、複数の受光素子が2次元アレイ状に配列された2次元撮像素子又は複数の受光素子がライン状に配列されたラインセンサを用いることができ、本例では複数の受光素子が2次元アレイ状に配列された2次元撮像素子を用いる。光検出手段12からの出力信号は、信号処理装置10から供給される駆動信号により順次読み出され、増幅器13により増幅された後、信号処理装置10に供給される。信号処理装置10は、光検出手段12から出力信号と位置センサ9からの位置情報とを用いて試料に形成されたトレンチの深さを算出する。
【0021】
本発明では、スリット手段3、試料7の表面及び光検出手段12は、互いに共役な位置に配置する。従って、スリット手段3の開口部の像が試料上に形成され、試料上にはライン状の照明エリアが形成される。試料上に形成されたライン状の照明エリアの像は光検出手段12上に結像される。このような光学配置を形成することにより、コンフォーカル光学系と同様な光学特性が得られ、対物レンズの焦点に対する試料表面及びトレンチの底部の相対変位量に応じて、光検出手段の受光素子に入射する反射光の光量が変化する。すなわち、トレンチの底部からの反射光を受光する受光素子は、対物レンズの焦点がトレンチの底部に位置した時最も高い輝度値の出力信号を出力し、対物レンズの焦点に対してトレンチの底部が変位するにしたがって徐々に低い輝度値の出力信号を出力する。同様に、トレンチ付近の試料表面からの反射光が入射する受光素子は、対物レンズの焦点が試料表面上に位置した場合、最も高い輝度値の出力信号を出力し、対物レンズの焦点に対して試料表面が変位するにしたがって徐々に低い輝度値の出力信号を出力する。従って、トレンチの底部からの反射光を受光する受光素子が最大輝度値を検出した時のステージの位置と、トレンチ付近の試料表面からの反射光を受光する受光素子が最大輝度値を検出した時のステージの位置とに基づいてトレンチの底部とトレンチ付近の試料表面との光軸方向の差であるトレンチの深さを測定することができる。
【0022】
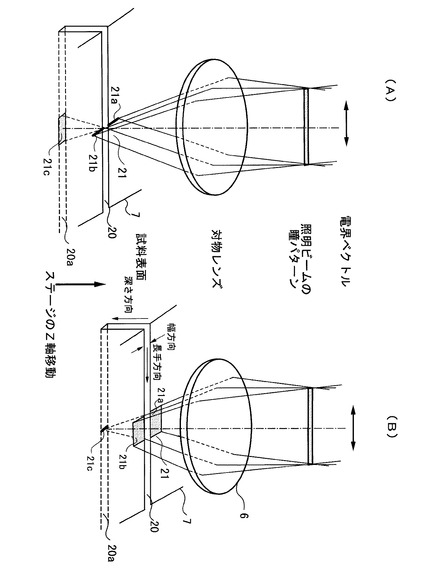
図2は、照明ビームの瞳パターン、対物レンズ、及び試料表面における照明状態を示す図である。図2(A)は対物レンズの焦点がトレンチが形成されている試料表面上に位置する状態、すなわちトレンチが形成されている試料表面上に合焦した状態を示し、図2(B)は対物レンズの焦点がトレンチの底面上に位置する状態、すなわちトレンチの底面上に合焦した状態を示す。尚、照明ビームとして、直線偏光した照明光を用いる場合の電界ベクトルの方向も併せて表示する。
【0023】
ライン状の照明ビームは、スリット手段3と対物レンズ6との間の光路中に形成される瞳位置に瞳パターンを形成する。瞳パターンはライン状をなし、その延在方向は、トレンチの延在方向(長手方向)と平行になるように設定する。瞳パターンから出射した照明ビームは対物レンズにより集束され、試料表面上にトレンチ20の長手方向と直交する方向に延在するライン状の照明ビーム21となり、試料表面上にトレンチと直交する方向に延在するライン状の照明エリアが形成される。分解能に関して、トレンチと平行な方向については、対物レンズの開口数に対応した広い角度範囲の照明光が集束するので、十分な分解能が得られる。
【0024】
ライン状照明ビーム21の一方の側のビーム部分21aは、トレンチ20をはさんで一方の側の試料表面に入射し、反対側のビーム分21bはトレンチをはさんで反対側の試料表面に入射し、中間のビーム部分21cはトレンチの開口部に入射する。
【0025】
図2(A)は、対物レンズの焦点が試料表面上に位置した状態を示す。この場合、照明ビーム21のビーム部分21a及び21bは試料表面上に焦線を形成し、高輝度の反射光を発生する。また、中間のビーム部分21cはトレンチ20の内部に進入し、発散性ビームとしてトレンチの底面20aの比較的広い照明エリアを形成し、低輝度の反射光を発生する。図2(B)は、対物レンズの焦点がトレンチの底面20a上に位置した状態を示す。この場合、照明ビームの中間のビーム部分21cはトレンチの底面20a上に集束し、高輝度の反射光を発生する。また、両端のビーム部分21a及び21bは、試料表面の比較的広い領域を照明し、低輝度の反射光を発生する。従って、ステージ移動によりZ軸スキャンを行うことにより、光検出手段からの出力信号に基づいて対物レンズの焦点がトレンチの底面20a上に位置するステージの光軸方向の位置及び対物レンズの焦点がトレンチ周囲の試料表面上に位置する光軸方向の位置が検出される。そして、検出された位置情報を用いて、試料表面及びトレンチの底面の光軸方向の位置が検出され、トレンチの深さを検出することができる。
【0026】
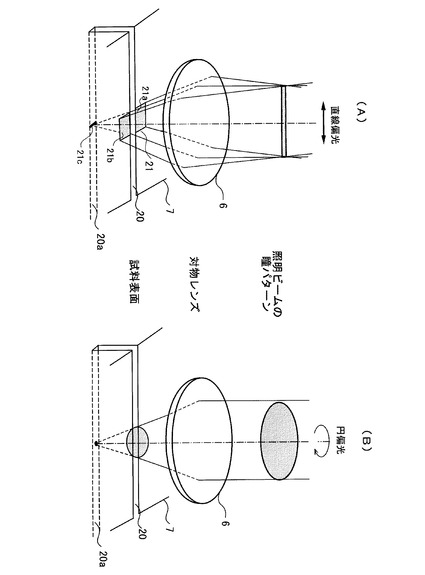
図3は本発明による照明方法と従来の照明方法とを対比した図である。図3(A)は本発明による照明方法を図示し、図3(B)は従来の照明方法を示す。本発明では、瞳位置にトレンチと平行に延在するライン状の瞳パターンを形成し、対物レンズを介して試料表面上にトレンチと直交する方向に延在するライン状の照明エリアを形成する。また、照明光として、直線偏光した照明ビームを用いる。これに対して、従来の照明方法では、瞳位置に円形の瞳パターンが形成され、試料表面上には円形の照明エリアが形成される。
【0027】
図3(B)に示すように、円形の瞳パターンを形成する照明方法では、試料表面に円形の照明エリアが形成されるため、照明ビームの大部分がトレンチ20の周囲の試料表面により遮光され、トレンチ20の内部に進入する照明光量は僅かである。従って、トレンチ幅の狭い高アスペクト比のトレンチの深さを測定するには限界がある。これに対して、トレンチと交差するようにライン状の照明エリアを形成すれば、トレンチ周囲の試料表面により遮光される照明光量が大幅に減少し、トレンチの内部に進入する照明光量が大幅に増大する。
【0028】
次に、Z軸スキャンについて説明する。本発明では、試料と対物レンズの焦点との間の相対距離を変えながらZ軸スキャンを行い、対物レンズの焦点がトレンチが形成されている試料表面上に位置した時の第1の位置を検出すると共に対物レンズの焦点がトレンチの底面上に位置した時の第2の位置を検出し、第1の位置と第2の位置との差分を求め、トレンチの深さ情報として出力する。すなわち、対物レンズの焦点が試料表面上に位置した時、試料表面上には焦線が形成され、試料表面から最大輝度の反射光が発生し、その反射光は光検出手段12により受光される。また、ステージを光軸方向に移動させ、対物レンズの焦点がトレンチの底面上に位置すると、トレンチの底面から最大輝度の反射光が発生し、その反射光は光検出手段12の別の受光素子により受光される。従って、トレンチが形成されている試料表面からの反射光を受光する受光素子が最大輝度値を出力する時点のステージの位置を検出することにより、対物レンズの焦点が試料表面上に位置した際の第1の位置が検出される。また、トレンチの底面からの反射光を受光する受光素子が最大輝度値を出力する時点のステージの位置を検出することにより、対物レンズの焦点がトレンチの底面上に位置した際の第2の位置が検出される。
【0029】
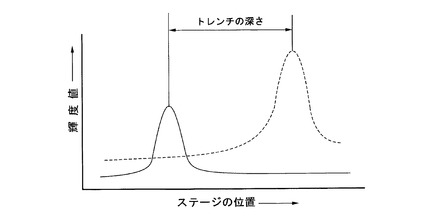
本例では、試料を支持するステージを光軸方向に移動させることによりZ軸スキャンを行う。Z軸スキャンに当たり、ステージの光軸方向の下限位置を設定する。下限位置からステージを徐々に上昇させながら、光検出手段の受光素子の出力信号の輝度値を検出する。同時に、ステージの光軸方向の位置も位置センサにより検出する。ステージがZ軸スキャンの上限位置に到達した時点でZ軸スキャンは終了する。すなわち、本発明では、Z軸スキャン中にトレンチの底面からの反射光及びトレンチを形成する試料表面からの反射光の両方を並行して検出するため、試料表面及びトレンチの底面の光軸方向の位置を1回のZ軸スキャンにより検出することが可能である。図4は、Z軸スキャン中におけるステージの光軸方向の位置に対する光検出手段12の試料表面からの反射光を受光する受光素子からの出力信号の輝度値の変化及びトレンチの底面からの反射光を受光する受光素子からの出力信号の輝度値の変化を示す。実線はトレンチの底面からの反射光を受光する受光素子からの出力信号の輝度値を示し、破線は試料表面からの反射光を受光する受光素子からの出力信号の輝度値を示す。図4に示すように、トレンチの底面からの反射光を受光する受光素子及び試料表面からの反射光を受光する受光素子は光軸方向の変位に対応してピーク輝度値を出力する。従って、2つのピーク輝度値が検出された時点の光軸方向の位置の差分がトレンチの深さに対応する。
【0030】
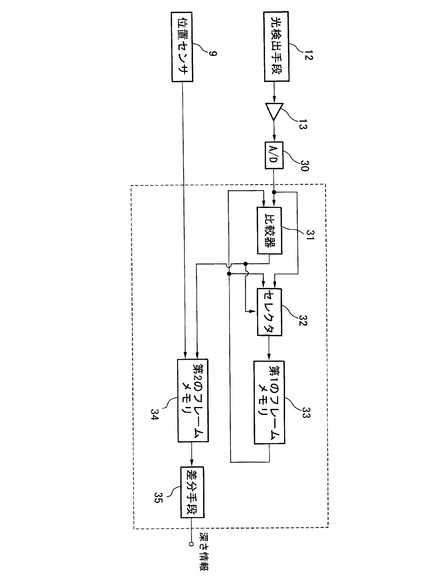
図5は信号処理装置におけるトレンチ深さを算出するアルゴリズムの一例を示す線図である。信号処理回路10には、光検出手段12の各受光素子から出力される輝度信号が入力する。また、位置センサ9から出力され、ステージの光軸方向の位置を示す位置信号も入力する。光検出手段12から出力された輝度信号は順次増幅器13により増幅され、A/D変換器30によりデジタル信号に変換されて信号処理装置10に入力する。入力した輝度信号は比較器31及びセレクタ32にそれぞれ供給する。セレクタ32により選択された輝度信号は第1のフレームメモリ33に記憶する。第1のフレームメモリ33に記憶されている輝度信号は比較器31及びセレクタ32に供給する。比較器31は、新たに入力した各画素の輝度値とフレームメモリ33に記憶されている各画素の輝度値とを比較し、新たに入力した輝度信号の輝度値が大きい場合、当該輝度信号を選択する選択信号をセレクタ32に出力する。セレクタ32は、比較器からの選択信号を受信した場合、新たに入力した輝度信号を選択して第1のフレームメモリ33に出力する。一方、比較器から選択信号が供給されない場合、フレームメモリに記憶されている輝度信号を出力する。
【0031】
位置センサ9から出力される位置信号は、第2のフレームメモリ34に供給される。第2のフレームメモリ34は、光検出手段の画素に対応するメモリ素子を有し、各メモリ素子ごとに最大輝度値が発生した時点におけるステージの位置を記憶する。第2のフレームメモリ34には、比較器からの選択信号も供給される。供給される選択信号は第2のフレームメモリ26に書込制御信号として作用する。よって、比較器から選択信号が供給された際、距離センサから出力される位置信号がフレームメモリに書き込まれる。
【0032】
本発明では、トレンチの底面からの反射光及びトレンチ付近の試料表面からの反射光の両方を並行して検出する。この場合、トレンチの底面の像及び試料表面の像は光検出手段上において別々の受光素子上に形成されるので、ステージの位置調整を行って、光検出手段上におけるトレンチの底面からの反射光を受光する受光素子及び試料表面からの反射光を受光する受光素子を予め特定しておくことが望ましい。
【0033】
Z軸スキャンの開始に伴い、ステージが上昇を開始する。光検出手段12は試料表面からの反射光及びトレンチの底面からの反射光を受光し、輝度信号を順次出力する。同時に、位置センサ9もステージの光軸方向の位置を検出し、順次位置信号を出力する。Z軸スキャン中に、輝度の高い輝度信号が入力すると、第1及び第2のフレームメモリの内容が順次更新される。そして、対物レンズの焦点が試料表面上に位置すると、試料表面からの反射光を受光する受光素子から最大輝度値が出力され、比較器が選択信号を発生する。この選択信号により最大輝度値が発生した時点のステージの位置が第2のフレームメモリに書き込まれる。さらに、ステージが上昇し、対物レンズの焦点がトレンチの底面に到達すると、トレンチの底面からの反射光を受光する受光素子から最大輝度値が発生する。同時に、比較器から選択信号が発生し、第2のフレームメモリ34に供給され、選択信号の入力に応じて、その時点のステージの位置信号が第2のフレームメモリに書き込まれる。
【0034】
Z軸スキャンが終了すると、試料表面からの反射光を受光する受光素子に対応するメモリ素子の位置信号とトレンチの底面からの反射光を受光する受光素子に対応するメモリ素子の位置信号をそれぞれ差分手段35に出力する。差分手段35は、2つの位置信号の差分を形成し、トレンチの深さ情報として出力する。このように、本発明では、1回のZ軸スキャンを行うだけで、トレンチの深さを測定することが可能である。
【0035】
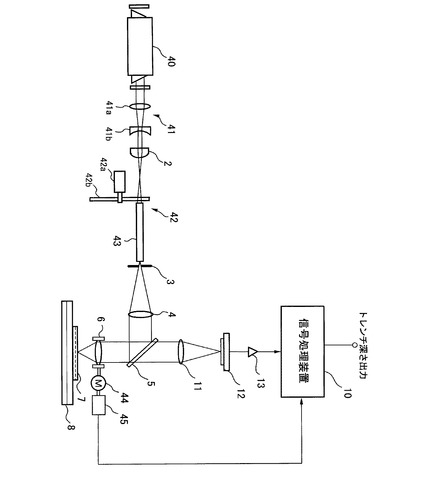
図6は本発明によるトレンチ深さ測定装置の変形例を示す図である。尚、図1で用いた部材と同一の構成要素には同一符号を付して説明する。本例では、照明光として直線偏光したレーザ光を用い、トレンチの側壁に対してS偏光した照明光が入射するように、すなわち、レーザ光の電界ベクトルの振動方向がトレンチの長手方向と平行になるように設定し、トレンチに向かう照明光及びトレンチから出射する反射光がトレンチの側壁により吸収される割合をできるだけ低減させる。照明ビームを発生する光源として、パルス発振型のエキシマレーザ40を用いる。エキシマレーザ40は、例えば193nmの波長の直線偏光したレーザビームを放出する。エキシマレーザ40は、トレンチを含む試料表面を照明する際、トレンチの側壁に対してS偏光したレーザ光が入射するように偏光状態を調整する。エキシマレーザ40から出射したレーザビームは、ビームリデューサ41に入射する。ビームリデューサ41は、凸レンズ41aと凹レンズ41bとが組合わされ、入射したレーザビームのビーム径を小さくする。ビームリデューサ41から出射したレーザビームは、シリンドリカルレンズ2に入射し、一方向(紙面内方向)に集束性を有するレーザビームに変換される。尚、エキシマレーザ40から出射する直線偏光したレーザ光の電界ベクトルの方向は、シリンドリカルレンズ2による集束方向と一致させる。すなわち、後述する対物レンズから出射する直線偏光したライン状照明ビームについて、ライン状ビームの延在方向と電界ベクトルとが互いに直交するように設定する。この場合、ライン状の照明ビームが試料に形成されているトレンチの長手方向と直交するように照明した場合、ライン状照明ビームの電界ベクトルは、トレンチの長手方向と平行になるように設定される。尚、電界ベクトルの方向と瞳パターンとの関係は、図2に示す通りであり、ライン状の瞳パターンの延在方向と電界ベクトルの方向とを一致させる。
【0036】
シリンドリカルレンズ2から出射したレーザビームは、スペックルパターン除去手段42に入射する。スペックルパターン除去手段42はモータ42aとモータ42aに連結した回転拡散板42bと有し、入射したレーザビームはスペックルパターンが時間的に変化するレーザビームに変換される。スペックルパターン除去手段から出射したレーザビームは、合成石英により構成されホモジナイザーとして機能する角ロッド43に入射する。レーザビームを用いて撮像された画像はスペックルパターン有するが、回転拡散板を通過する間に位相分布が変調され、角ロッドを通過する間に断面がほぼ均一な輝度分布のレーザビームに変換される。角ロッド43から出射したレーザビームはスリット手段3に入射する。スリット手段3は、紙面と直交する方向、すなわちシリンドリカルレンズの集束方向と直交する方向に延在するスリット開口を有し、入射したレーザビームはスリット開口を通過し、発散性のライン状ビームとして集束性レンズ4に入射する。集束性レンズ4は、入射したレーザビームに対して、スリット開口の延在方向(紙面と直交する方向)の成分についてはビームを集束するように作用し、スリット開口の延在方向と直交する方向(紙面内方向)の成分については発散性ビームが光軸に平行な平行ビームとなるように作用する。
【0037】
集束性レンズ4から出射したレーザビームは、ビームスプリッタ5で反射し、対物レンズ6に入射する。本例では、ビームスプリッタとしてハーフミラーを用い、直線偏光したレーザビームを対物レンズに入射させる。対物レンズ6は、入射したレーザビームを集束性のライン状照明ビームに変換し、トレンチが形成されている試料表面をライン状の直線偏光した照明ビームにより照明する。
【0038】
図1に示す実施例と同様に、瞳位置に形成されたライン状の瞳パターンは、対物レンズ6により試料表面上に結像され、トレンチと直交するライン状の照明エリアが試料表面上に形成される。よって、トレンチの内部及びトレンチが形成される試料表面の両方を同時に照明する。照明ビームの電界ベクトルの振動方向は、ライン状照明ビームの延在方向と直交する方向に設定されているので、トレンチの内部には、電界ベクトルがトレンチの長手方向と平行に設定されている直線偏光した照明光が入射する。
【0039】
試料7からの反射光、すなわちトレンチの底面からの反射光及びトレンチの周囲の試料表面からの反射光は、対物レンズにより集光され、ビームスプリッタ5及び結像レンズ11を経て光検出手段12に入射する。光検出手段12からの出力信号は、信号処理装置10から供給される駆動信号により順次読み出され、増幅器13により増幅された後、信号処理装置10に供給される。
【0040】
本例では、試料7を支持するステージ8は光軸方向に静止した状態に維持し、対物レンズ6を光軸方向に移動させてZ軸スキャンを行う。対物レンズ6は光軸方向に移動可能に支持されると共にサーボモータ44を連結する。サーボモータ44にエンコーダ45を連結し、対物レンズの光軸方向の位置を検出する。検出された位置情報は、信号処理装置10に供給する。そして、前述した実施例と同様に、信号処理装置10は、光検出手段12から出力信号とエンコーダ44からの位置情報とを用いて試料に形成されたトレンチの深さを算出する。
【0041】
次に、直線偏光した照明光の電界ベクトルの振動方向による作用効果について説明する。トレンチの底面からの反射光を用いて深さ測定する場合、底面からの反射光の光量が少ないと、光検出手段から出力される信号レベルが低くなり、ピーク輝度値の検出精度が低下する不具合が発生する。特に、高アスペクト比のトレンチの深さを測定する場合、対物レンズからトレンチの内部に進行する照明光及びトレンチの底面からの反射光に対するトレンチ側壁による光吸収が問題となる。そこで、照明光の偏光状態(電界ベクトルの振動方向)とトレンチの側壁における反射率との関係について検討した。すなわち、照明光がトレンチの内部に進入する際、トレンチの側壁で反射し或いは反射を繰り返してトレンチの底面に入射する。また、トレンチの底面で反射した反射光も、トレンチの側壁で反射しトレンチから出射する。従って、トレンチの側壁に対する照明光の反射率により、トレンチから出射する反射光の光量が変化することが想定される。そこで、直線偏光した照明光の偏光状態によって、トレンチの側壁に対する反射率がどのように変化するかについて検討した。
【0042】
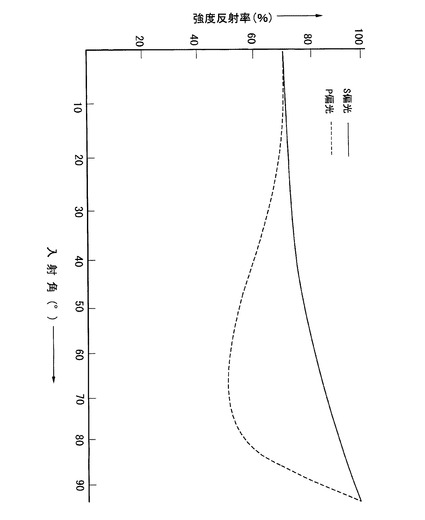
図7は、結晶シリコンの波長193nmにおける強度反射率(屈折率:0.883,消衰係数2.778)を示すグラフである。このデータは、刊行物「Handbook of Optical Constance of Solids」(Edard D. Palik 著、Academic Press, Boston, 1985)に記載されたデータである。横軸は入射角(度)を示し、縦軸は強度反射率を示す。図7において、実線は結晶シリコンの表面に対してS偏光した照明光が入射した時の強度反射率を示し、破線はP偏光した照明光が入射した時の強度反射率を示す。S偏光は電界ベクトル(電気ベクトル)の振動方向が入射面に対して直交する方向であり、従って、電界ベクトルの振動方向はシリコン結晶の表面と平行である。これに対して、P偏光は、入射面に対して電界ベクトルの振動方向は平行であり、従って、電界ベクトルの振動方向はシリコン結晶の表面に対して直交する方向である。
【0043】
図7を参照するに、入射角が0度付近では、S偏光及びP偏光共に反射率が70%程度である。照明光がS偏光の場合、入射角に対して反射率は徐々に増大し、入射角が60°を超えると反射率は80%以上になる。さらに、入射角が90°になると反射率は100%になる。一方、照明光がP偏光の場合、入射角が大きくなるにしたがって反射率は徐々に低下し、入射角が70°付近で最小値となり、その後徐々に増大し、入射角が90度付近ではS偏光と同様に反射率は100%である。当該データより、シリコン結晶の表面に対する入射角が比較的大きい場合、S偏光の方がP偏光よりも反射率が高いことが示される。
【0044】
上記データをトレンチに入射する照明光について適用する。シリコン基板に形成されたトレンチを直線偏光した照明光で照明する場合、照明光は回折作用を受けるため、トレンチの側壁に対する入射角は90°から若干変位している。光源から出射した照明光はトレンチの側壁で反射しながらトレンチの底面に入射する。トレンチの底面からの反射光も側壁で反射し、トレンチから出射する。従って、トレンチの側壁における反射率が高いほど、照明光のトレンチにおける損失が小さい。従って、上記結晶シリコンの波長193nmにおける強度反射率のデータに基づけば、照明光としてS偏光した光を用い、トレンチに対してS偏光した光を投射することにより、トレンチにおける光損失が低減された深さ測定が可能になる。ここで、S偏光の場合、電界ベクトルの振動方向は入射面に対して垂直であるから、トレンチに入射する際、その電界ベクトルの振動方向はトレンチの側壁に対して平行になり、トレンチの長手方向に対して平行に設定される。
【0045】
図7に示す強度反射率のデータに対する検討結果より、照明光として電界ベクトルの方向がトレンチの長手方向と平行に設定された直線偏光した光を用いることにより、トレンチにより吸収される照明光及び反射光の割合を大幅に減少させることが可能であることが確認された。特に、トレンチの幅が照明光の波長程度に設定されている場合であっても、十分な反射光量が確保される。この検討結果より、スリット幅が照明光の波長にほぼ等しく且つアスペトク比が10程度の高アスペクト比のトレンチであっても、高精度の深さ測定が可能になる。
【0046】
さらに、トレンチの長手方向と直交する方向に延在するライン状の照明ビームを用いると共に照明ビームの電界ベクトルの方向をトレンチの長手方向と平行に設定することによる相乗効果として、光検出手段から出力される輝度信号の信号レベルが相当高くなり、紫外域又は深紫外域(DUV)の照明光を用いて波長レベルの幅(0.2μm程度)のトレンチの深さを高精度に測定することが可能になる。尚、トレンチが導波路として作用する場合、導波モードに応じて群遅延を考慮して、測定結果を補正すればよい。
【0047】
図8は本発明によるトレンチ深さ測定装置の別の変形例を示す図である。本例では、試料表面の2次元画像を撮像する撮像モードと試料に形成されたトレンチの深さを測定する深さ測定モードと有し、試料観察と深さ測定とを選択的に切り換えることができるトレンチ深さ測定装置について説明する。すなわち、撮像モードにおいて試料表面の2次元画像を撮像し、モニタ上に表示される試料表面の2次元画像を見ながら深さ測定されるべきトレンチの位置を調整する。そして、モード切り換えを行い、位置調整されたトレンチの深さは深さ測定モードにおいて測定する。尚、図6で用いた部材と同一の構成要素には同一符号を付し、その説明は省略する。
【0048】
図8を参照するに、ホモジナイザーとして機能する角ロッド43と集束性レンズ4との間の光路中に、スリット手段3をバイパスするためのバイパス光路手段60と、第1及び第2のリレーレンズ61及び62を配置する。第1及び第2のリレーレンズは、角ロッド43とスリット手段3との間に光路中に配置する。バイパス光路手段60は、第1及び第2のリレーレンズの間に配置した第1の全反射ミラー63と、第1の全反射ミラーで反射した照明光を反射する第2の全反射ミラー64と、第2の全反射ミラーから出射した照明光を集束させる集束性レンズ65と、集束性レンズ65から出射した照明光を反射する全反射ミラー66と、全反射ミラー66から出射した照明光を集束性レンズ4に入射させる第4の全反射ミラー67とを有する。これら第1の全反射ミラー63から第4の全反射ミラー67までの光路中に含まれる光学素子は一体的に組み合わされ、一体的に光路に出し入れ可能に構成する。バイパス光路手段60は、試料表面を観察する撮像モードにおいて光路中に配置され、深さ測定モードにおいては光路から外される。
【0049】
試料表面の2次元画像を撮像する撮像モードにおいて、角ロッド43から出射した照明ビームは、第1のリレーレンズ61、第1の全反射ミラー63、第2の全反射ミラー64、集束性レンズ65、第3の全反射ミラー66、及び第4の全反射ミラー67を含むバイパス光路を経て対物レンズ6の照明側の光路に結合される。そして、集束性レンズ4、ビームスプリッタ5及び対物レンズ6経て試料表面の2次元エリアを照明する。そして、試料7の表面からの反射光は、対物レンズにより集光され、ビームスプリッタ及び結像レンズ11を経て2次元撮像素子で構成される光検出手段12に入射する。光検出手段からの出力信号は増幅されて信号処理装置10に供給され、試料表面の2次元画像信号が出力される。よって、オペレータは、モニタ上に表示される試料の2次元画像を見ながら、深さ測定されるトレンチが所望の位置に位置するようにステージの位置を調整する。
【0050】
位置調整が終了した後、モード切り換えを行い、深さ測定モードに切り換える。このモード切り換えによりバイパス光路手段60を照明光学系の光路から取り外され、深さ測定が実行される。深さ測定モードにおいて、角ロッド43から出射したライン状の照明ビームは、第1及び第2のリレーレンズ61及び62を通過し、スリット手段3に入射する。さらに、スリット手段3のスリット開口を通過し、集束性レンズ4及びビームスプリッタ5を経て対物レンズ6に入射する。そして、試料7に形成されたトレンチと直交する方向に延在するライン状の照明ビームとなってトレンチを含む試料表面を照明する。以下、図5に示す実施例に基づいて深さ測定が行われる。
【0051】
図9は本発明によるトレンチ深さ測定方法のアルゴリズムの一例を示すフローチャートである。ステップ1において、トレンチ深さ測定装置のモードを撮像モードに設定し、試料表面の2次元画像を撮像し、ライン状の照明ビームと交差するようにトレンチの位置を調整する。
【0052】
次に、モード切り換えを行って撮像モードから深さ測定モードに切り換える。続いて、照明光学系を作動させ、試料表面のトレンチと交差するようにライン状の照明エリアを形成する(ステップ2)。
【0053】
続いて、Z軸スキャンを実行する。この際、対物レンズをその上限位置から下限位置まで徐々に下降させる(ステップ3)。対物レンズの下降中、対物レンズの光軸方向の位置を検出し、位置情報として出力する。また、光検出手段上に形成されるトレンチの像及びトレンチ周囲の試料表面の像の輝度値も検出する。そして、図5に示す信号処理を行って最大輝度値を発生する対物レンズの光軸方向の位置を検出する。
【0054】
Z軸スキャン中、初めに対物レンズの焦点が試料表面に近づき、焦点が試料表面上に位置すると、試料表面に焦線が形成される。その際、試料表面からの反射光を受光する受光素子から最大輝度値が出力される。最大輝度値が発生する対物レンズの光軸方向の位置が第1の位置として検出される(ステップ4)。
【0055】
さらに対物レンズが降下すると、対物レンズの焦点はトレンチの底面に近づき、焦点がトレンチの底面上に位置すると、トレンチの像を検出する受光素子から最も高い輝度の輝度信号が出力され、その時点の対物レンズの光軸方向の位置を第2の位置として検出する(ステップ5)。
【0056】
対物レンズが下限位置に到達すると、深さ測定は終了する。そして、試料表面の光軸方向の位置を示す第1の位置とトレンチの底面の光軸方向の位置を示す第2の位置との差分を形成し、トレンチの深さ情報として出力する。
【0057】
図10は本発明の基本原理を利用した共焦点顕微鏡の構成を示す図である。本例の共焦点顕微鏡は、深さ測定モードと2次元画像撮像モードとの間でモード切り換え可能な共焦点顕微鏡として機能する。尚、図1で用いた構成要素と同一の構成要素には同一符号を付し、その説明は省略する。光源1から出射した照明ビームは、シリンドリカルレンズ2により一方向に集束するライン状の照明ビームに変換され、スリット手段3、集束性レンズ4及びビームスプリッタ5を経てライン状の照明ビームとしてガルバノミラー70に入射する。ガルバノミラーは、試料表面の2次元画像を撮像する撮像モードにおいては、入射したライン状の照明ビームをその延在方向と直交する方向に周期的に偏向する走査装置として機能し、深さ測定モードにおいては静止状態に維持される静止ミラーとして機能する。
【0058】
ガルバノミラー70から出射したライン状の照明ビームは、2つのリレーレンズ71及び72を経て瞳位置にライン状の瞳パターンを形成する。瞳パターンを形成するライン状の照明ビームは、対物レンズ6により集束され、試料7にトレンチと交差するようにライン状の照明エリアを形成する。
【0059】
試料7を支持するステージ8は、対物レンズ6の光軸と直交するX−Y面内で自在に移動することができると共に、対物レンズの光軸方向であるZ方向にも移動する。ステージ8は、撮像モード及び深さ測定モードの両方のモードにおいてZ軸スキャンを行う。従って、撮像モードにおいては、試料表面はライン状の照明ビームにより走査されると共にZ軸方向にも走査されることになる。一方、深さ測定モードにおいては、ガルバノミラーは固定ミラーとして機能するため、試料表面はライン状照明ビームによりZ軸方向にそって1次元スキャンされることになる。ステージ8には、Z軸方向の位置を検出する位置センサ9を連結する。位置センサ9は、Z軸スキャン中にステージの光軸方向の位置を検出し、検出した位置情報を信号処理装置10に出力する。
【0060】
試料7からの反射光、すなわちトレンチの底部からの反射光及びトレンチ周囲の試料表面からの反射光は、対物レンズにより集光され、リレーレンズ72及び71、ガルバノミラー70、ビームスプリッタ5及び結像レンズ11を経て光検出手段12に入射する。本例では、光検出手段として、複数の受光素子がライン状に配列されたラインセンサを用いる。光検出手段からの出力信号は、信号処理装置10から供給される駆動信号により順次読み出され、増幅器13により増幅された後、信号処理装置10に供給される。信号処理装置10は、光検出手段から出力される輝度信号と位置センサ9からの位置情報とを用いて図5に基づく処理を行い、各画素について、Z軸スキャン中に検出された最大輝度値をメモリに記憶すると共に最大輝度値を発生した時点のステージの光軸方向の位置を検出してメモリに記憶する。
【0061】
試料表面の2次元画像を撮像する撮像モードにおいて、各画素が最大輝度値により構成される試料表面の2次元画像が出力されると共に最大輝度値を発生するステージの位置情報、すなわち試料表面の形状情報も出力される。よって、試料表面の3次元画像を出力することができる。一方、深さ測定モードにおいては、ガルバノミラー70は静止し、ステージ移動によるZ軸スキャンだけが行われるので、信号処理装置は、試料表面の光軸方向の位置を示す第1の位置とトレンチの底面の光軸方向の位置を示す第2の位置とに基づき、トレンチの深さ情報を出力する。
【0062】
本発明は上述した実施例だけに限定されず、種々の変形や変更が可能である。例えば、上述した実施例では、センサ手段によりステージ又は対物レンズの光軸方向の位置を検出し位置情報として出力したが、ステージ及び対物レンズの移動量を用いて位置情報として利用することも可能である。さらに、対物レンズに距離センサを固定し、距離センサにより対物レンズと試料との間の距離を測定し、測定された距離情報を用いてステージ又は対物レンズの光軸方向の変位量を求めることも可能である。
【0063】
さらに、トレンチの幅が測定値に影響を与える場合は、画像より求めたトレンチの幅の値を用いて深さの測定値を補正することも可能である。
【符号の説明】
【0064】
1 光源
2 シリンドリカルレンズ
3 スリット手段
4 集束性レンズ
5 ビームスプリッタ
6 対物レンズ
7 試料
8 ステージ
9 位置センサ
10 信号処理装置
11 結像レンズ
12 光検出手段
13 増幅器
20 照明ビーム
30 A/D変換器
31 比較器
32 セレクタ
33 第1のフレームメモリ
34 第2のフレームメモリ
35 差分手段
40 エキシマレーザ
41 ビームリデューサ
42 スペックルパターン除去手段
43 角ロッド
44 サーボモータ
45 エンコーダ
【技術分野】
【0001】
本発明は、各種半導体基板に形成されたトレンチの深さを測定するトレンチ深さ測定装置、特に高アスペクト比のトレンチの深さを高精度で測定できるトレンチ深さ測定装置に関するものである。
【背景技術】
【0002】
半導体デバイスの製造プロセスにおいては、トレンチアイソレーションやトレンチ加工を利用した各種デバイスが開発されている。例えば、高耐圧MOSFETとして、トレンチゲート構造を有するMOSFETが開発されている。また、CMOSセンサやCCDセンサ等の撮像素子においても、各受光素子を分離するようにトレンチが形成され、隣接する画素間のクロストークが防止されている。一方、トレンチの深さはデバイスの性能や製造の歩留りに強い影響を与え、例えば、CMOSセンサにおいては、トレンチの深さが不十分な場合、隣接する画素間の電荷の漏洩が大きくなり、撮像される画像品質に悪影響を及ぼすおそれがある。また、パワーデバイスにおいても、トレンチの深さが不十分な場合、所定の耐電圧性能が得られない場合がある。さらに、半導体デバイスの微細化に伴い、高アスペクト比のトレンチが広く利用されている。従って、半導体デバイスの製造プロセスにおいては、高アスペクト比のトレンチの深さを高精度に測定できるトレンチ深さ測定装置の開発が強く要請されている。
【0003】
トレンチの深さを測定する測定装置として、共焦点光学系を利用した測定装置が既知である(例えば、特許文献1参照)。この既知のトレンチ深さ測定装置では、トレンチが形成されている基板を保持するステージと対物レンズとの間の距離を変えながらレーザビームにより基板表面を2次元走査し、基板表面からの反射光及びトレンチの底面からの反射光を光検出器により検出している。そして、トレンチ周囲の基板表面からの反射光の強度が最大となる対物レンズの光軸方向の位置とトレンチの底部からの反射光の強度が最大となる対物レンズの光軸方向の位置を特定し、これら2つの位置間の距離を求め、トレンチの深さが測定されている。
【特許文献1】特開2003−218095号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述した既知の測定装置では、照明ビームの瞳パターンが円形であるため、高アスペクト比のトレンチの深さを測定しようとする場合、トレンチに入射する照明ビームの大部分がトレンチの端縁で遮光されてしまい、トレンチの底面に僅かな照明光しか入射しない問題があった。すなわち、CMOSセンサやパワーデバイスに形成されているトレンチの幅はサブミクロンのレベルである。よって、瞳のパターンが円形の照明ビームを用いたのでは、照明光がトレンチの周辺の試料表面により遮光されてしまい、トレンチの内部に進入できず、トレンチの底面からの反射光が微弱すぎる問題があった。このため、光検出器からの出力信号の信号レベルが低すぎ、精度的に問題が生じていた。この問題を解決する方法として、開口数の小さい対物レンズを用いて底面に入射する照明光量を増加させることが考えられる。しかしながら、開口数の小さい対物レンズを用いた場合分解能が低下する不具合が生じてしまう。例えば、CMOSセンサに形成されているトレンチの深さを測定する場合、深さ方向に0.1μm程度の分解能が要求されるため、開口数の小さい対物レンズを用いたのでは、光軸方向の分解能が低すぎ、深さ測定の要求に対応できない不具合が生じてしまう。
【0005】
また、従来の共焦点型の深さ測定装置では、対物レンズの光軸方向の位置を変えながら、レーザビームによりトレンチを含む試料表面を2次元走査しているため、2次元走査に相当な時間を必要とし、スループットが低下する問題点があった。すなわち、従来のトレンチ深さ測定装置では、対物レンズの光軸方向の位置を変えながら試料表面を2次元走査しているため2次元走査に相当な時間が必要であり、1つのトレンチの深さを測定するのに長時間かかり、スループットの点においても問題があった。
【0006】
さらに、トレンチの深さを高分解能で測定するには、短波長の測定光を用いることが想定される。一方、紫外域や深紫外(DUV)のレーザ光を発生するレーザ光源の多くは、パルス発振型であるため、スペックルパターンの影響を除去ないし軽減するため複数のレーザパルスを放出させてデータを取得し、積分作用によりスペックルパターンの影響を低減する必要がある。このため、深さ測定に必要なZ軸スキャン中における対物レンズ又は試料ステージの移動速度を相当遅く設定しなければならない。よって、試料表面を2次元走査するのでは、測定のスループットが相当遅くなる問題が発生してしまう。この場合、試料表面の2次元走査を行わずZ軸スキャンだけを行うことが想定される。しかしながら、照明ビームの瞳パターンが円形の場合、トレンチの底面だけしか照明されないため、トレンチの底面の光軸方向の位置を検出するためのZ軸スキャンとトレンチ周囲の試料表面の光軸方向の位置を検出するためのZ軸スキャンの2回のZ軸スキャンが必要であり、依然としてスループットが低下する問題があった。従って、紫外域や深紫外(DUV)のレーザ光を用いても相当高いスループットが得られるトレンチ深さ測定装置の開発も強く要請されている。
【0007】
本発明の目的は、高アスペクト比のトレンチの深さを高精度で測定できるトレンチ深さ測定装置を実現することにある。
さらに、本発明の別の目的は、高アスペクト比のトレンチの深さを高いスループットで測定できるトレンチ深さ測定装置を提供することにある。
さらに、本発明の別の目的は、トレンチ幅が照明光の波長と同程度のトレンチの深さを測定できるトレンチ深さ測定装置を実現することにある。
【課題を解決するための手段】
【0008】
本発明によるトレンチ深さ測定装置は、試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具えることを特徴とする。
【0009】
本発明では、試料に形成されたトレンチの長手方向と平行に延在するライン状の瞳パターンを形成し、ライン状の瞳パターンを対物レンズを介して試料表面に結像しているので、試料表面上にはトレンチと直交するライン状の照明エリアが形成される。この結果、試料表面で遮光され深さ測定に寄与しない照明光を大幅に減らすことができる。さらに、開口数の大きな対物レンズ、例えば開口数が0.80程度の対物レンズを用いて照明することができ、高精度なトレンチの深さ測定が可能になる。しかも、トレンチの周辺で遮光される照明光の光量が大幅に減少するので、大出力の光源を用いることなく、光検出手段から安定した信号レベルの出力信号を得ることができる。
【0010】
さらに、試料表面上にトレンチと交差するように形成されるライン状の照明エリアは、トレンチの内部及びトレンチ周囲の試料表面の両方を同時に照明することができ、1回のZ軸スキャンを行うだけでトレンチの底面及びトレンチ周囲の試料表面の光軸方向の位置を検出することが可能である。この結果、測定のスループットが大幅に改善される利点が達成される。特に、高い分解能の測定を行うには、短波長の照明ビームを発生するレーザ光源を用いることが望ましい。しかしながら、紫外域や深紫外域(DUV)のレーザビームを放出するエキシマレーザの多くはパルス発振型であるため、スペックルパターンによる影響を低減するためには、照明光の位相分布を変調しながら複数の画像を撮像して積算する必要がある。この場合、試料表面を2次元走査する測定装置では、2次元走査自体に相当な時間が必要であるため、スループットが大幅に低下してしまう。また、瞳パターンが円形の照明ビームを用いる場合、トレンチの底面に焦点を合せてZ軸スキャンを行ったのでは、試料表面の光軸方向の位置が検出されないため、試料表面の位置検出のためのZ軸スキャンが別途必要であり、少なくとも2回のZ軸スキャンが必要である。よって、パルス発振型のエキシマレーザを用いて照明ビームを発生させる場合、スループットが一層低下する不具合が発生する。これに対して、本発明では、トレンチの内部及び周辺の試料表面の両方を同時に照明しているので、パルス発振型のエキシマレーザを用いても十分に対応できるトレンチ深さ測定装置が実現される。
【0011】
本発明による別のトレンチ深さ測定装置は、試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
直線偏光した照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具え、
前記試料表面に入射する照明ビームを構成する直線偏光した光の電界ベクトルの振動方向は、トレンチの長手方向に対してほぼ平行に設定されることを特徴とする。
【0012】
照明光がトレンチの内部に進入する際、トレンチの側壁で反射し或いは反射を繰り返してトレンチの底面に入射する。また、トレンチの底面で反射した反射光も、トレンチの側壁で反射しトレンチから出射する。従って、トレンチの側壁に対する照明光の反射率は、トレンチにおける光損失と密接に関係する。そこで、照明光の偏光状態と反射率との関係について検討した結果、波長が193nmの照明光の場合、比較的大きな入射角において、S偏光の反射率がP偏光の反射率よりも相当高いことが判明した。しかも、S偏光した光の場合、入射角が60°を超える範囲において80%以上の反射率が得られることも確認された。このデータを、トレンチに適用すれば、直線偏光した照明光の電界ベクトルの振動方向をトレンチの長手方向と平行になるように設定することによりトレンチにおける光損失が相当減少する。この検討結果によれば、トレンチの幅が照明光の波長に等しい場合であってもトレンチ底面から十分な光量の反射光が発生することになる。この検討結果に基づき、本発明では、照明光として直線偏光した光を用い、その電界ベクトルの方向はトレンチの長手方向と平行になるように設定する。これにより、照明光源として波長が193nmのレーザ光を発生するArFエキシマレーザを用い、レーザ光の電界ベクトルをトレンチの長手方向と平行に設定することにより、トレンチ幅が0.2μm程度のトレンチの深さを高精度に測定することが可能になる。すなわち、照明光源としてArFエキシマレーザを用いると共に開口数の大きな対物レンズを用いることにより、照明光の波長にほぼ等しい開口幅のトレンチであっても、その深さを高精度に測定することができる。
【発明の効果】
【0013】
本発明では、光源と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、ライン状の瞳パターンを対物レンズを介して試料表面上に結像しているので、試料表面上にはトレンチと直交する方向に延在するライン状の照明エリアが形成される。この結果、試料表面で遮光され深さ測定に寄与しない照明光を大幅に減らすことができ、高精度なトレンチの深さ測定が可能になる。さらに、試料表面上に形成されるライン状の照明エリアはトレンチ及びその周囲の試料表面の両方を照明するので、1回のZ軸スキャンを行うだけでトレンチの底部及びトレンチ周囲の試料表面の光軸方向の位置を検出することができ、測定のスループットが大幅に改善される。
さらに、ライン状の瞳パターンを形成すると共に照明光の電界ベクトルの方向をトレンチの長手方向と平行に設定すれば、トレンチ幅が照明光の波長に等しいトレンチであっても、その深さを高精度に測定することができる。
【図面の簡単な説明】
【0014】
【図1】本発明によるトレンチ深さ測定装置の基本構成を示す図である。
【図2】照明ビームの瞳パターン、対物レンズ及び試料に形成される像の関係を示す図である。
【図3】本発明による照明方法と従来の照明方法とを対比した図である。
【図4】Z軸スキャン中のステージの位置と光検出手段から出力される出力信号の輝度値との関係を示すグラフである。
【図5】信号処理装置の一例を示す図である。
【図6】本発明によるトレンチ深さ測定装置の変形例を示す図である。
【図7】直線偏光した照明光の電界ベクトルの方向に対するシィミュレーション結果を説明する図である。
【図8】本発明によるトレンチ深さ測定装置の別の変形例を示す図である。
【図9】本発明によるトレンチ深さ測定方法のアルゴリズムを示す図である。
【図10】本発明による共焦点顕微鏡の一例を示す図である。
【発明を実施するための形態】
【0015】
図1は本発明によるトレンチ深さ測定装置の基本構成を示す図である。本発明では、ライン状の照明ビームにより試料表面を照明する照明光学系を用いてトレンチの深さを測定する。光源1から照明ビームを放出する。光源として、水銀ランプ等のランプを用いることができ、或いは、直線偏光した照明光を放出する半導体レーザやHe-Neレーザ等の連続発振型のレーザ又はエキシマレーザ等のパルス発振型のレーザを用いることができる。また、照明光の波長として、各種の波長域の光を用いることができ、紫外域又は深紫外域(DUV)の波長の照明光を用いることができる。光源1から出射した照明ビームは、シリンドリカルレンズ2に入射する。シリンドリカルレンズ2は、紙面内方向にだけ集束性を有し、入射した照明ビームをライン状の照明ビームに変換する。ライン状照明ビームの集束点に、スリット手段3を配置する。スリット手段3は、紙面と直交する方向に延在するスリット状の開口部を有し、そのスリット開口の幅は例えば10μmとする。ライン状の照明ビームは、スリット手段3のスリット開口を通過し、集束性レンズ4を経てビームスプリッタ5に入射する。集束性レンズ4は、入射したライン状の照明ビームに対して、スリット開口の延在方向(紙面と直交する方向)についてはビームを集束するように作用し、スリット開口の延在方向と直交する方向(紙面内方向)については発散性ビームが光軸に平行な平行ビームとなるように作用する。尚、ビームスプリッタ5は、照明光源から試料に向かう照明ビームと試料からの反射光とを分離する作用を果たす。
【0016】
ビームスプリッタ5で反射したライン状の照明ビームは、対物レンズ6に入射する。本発明では、光源1と対物レンズ6との間に照明ビームの瞳が形成され、瞳位置にトレンチの長手方向と平行なライン状の瞳パターンが形成される。そして、対物レンズ6は、ライン状の瞳パターンを試料7のトレンチが形成されていく表面上に結像し、トレンチと交差するライン状の照明エリアを形成する。本例では、高い分解能を得るため、開口数の大きな対物レンズを用い、例えば開口数が0.9程度の対物レンズを用いることができる。トレンチが形成されている試料として、例えばCMOSセンサが製造されるシリコン基板やパワーデバイスが形成される各種半導体基板が用いられる。尚、光源1から対物レンズ6までの光路中に含まれる光学素子は、試料表面をライン状の照明ビームで照明する照明光学系を構成する。
【0017】
後述するように、深さ測定されるべきトレンチは、紙面内に延在し、ライン状の照明エリアはトレンチと直交する方向(紙面と直交する方向)に延在するものとする。すなわち、ライン状の照明エリアは、深さ測定されるべきトレンチと交差するように、本例ではトレンチの長手方向と直交するように形成される。従って、ライン状照明ビームの一部は、トレンチの内部に進行し、トレンチの底部で反射し、その反射光は対物レンズ6により集光される。また、ライン状照明ビームの残りの部分は、トレンチが形成される試料表面に入射し、試料表面で反射し、その反射光も対物レンズ6により集光される。このように、本発明では、ライン状の照明ビームを用い、トレンチの内部及びトレンチが形成される試料表面の両方を同時に照明する。
【0018】
試料7はステージ8上に配置する。ステージ8は、対物レンズ6の光軸と直交するX−Y面内で自在に移動することができると共に、対物レンズの光軸方向であるZ方向にも移動する。ステージをX−Y面で移動させて位置合せを行い、測定すべきトレンチを対物レンズの視野内に位置決めする。また、ステージ8の光軸方向の移動により試料7と対物レンズ6との間の相対的距離が変化し、Z軸スキャンが行われる。尚、Z軸スキャン手段として、ステージ移動だけでなく、対物レンズにサーボモータを装着し、ステージを静止させ、対物レンズを光軸方向に移動させてZ軸スキャンを行うことも可能である。
【0019】
ステージ8には、Z軸方向の位置を検出する位置センサ9を連結する。センサ手段である位置センサ9は、Z軸スキャン中にステージの光軸方向の位置を検出し、検出した位置情報を信号処理装置10に出力する。すなわち、位置センサ9により検出された位置情報は、Z軸スキャン中における対物レンズに対する試料表面及びトレンチ底部の相対位置情報ないし相対距離情報として利用し、対物レンズの焦点が試料表面及びトレンチの底部に位置した時の対物レンズと試料との間の位置関係を特定する。
【0020】
試料7からの反射光、すなわちトレンチの底部からの反射光及びトレンチ周囲の試料表面からの反射光は、対物レンズにより集光され、ビームスプリッタ5及び結像レンズ11を経て光検出手段12に入射する。光検出手段として、複数の受光素子が2次元アレイ状に配列された2次元撮像素子又は複数の受光素子がライン状に配列されたラインセンサを用いることができ、本例では複数の受光素子が2次元アレイ状に配列された2次元撮像素子を用いる。光検出手段12からの出力信号は、信号処理装置10から供給される駆動信号により順次読み出され、増幅器13により増幅された後、信号処理装置10に供給される。信号処理装置10は、光検出手段12から出力信号と位置センサ9からの位置情報とを用いて試料に形成されたトレンチの深さを算出する。
【0021】
本発明では、スリット手段3、試料7の表面及び光検出手段12は、互いに共役な位置に配置する。従って、スリット手段3の開口部の像が試料上に形成され、試料上にはライン状の照明エリアが形成される。試料上に形成されたライン状の照明エリアの像は光検出手段12上に結像される。このような光学配置を形成することにより、コンフォーカル光学系と同様な光学特性が得られ、対物レンズの焦点に対する試料表面及びトレンチの底部の相対変位量に応じて、光検出手段の受光素子に入射する反射光の光量が変化する。すなわち、トレンチの底部からの反射光を受光する受光素子は、対物レンズの焦点がトレンチの底部に位置した時最も高い輝度値の出力信号を出力し、対物レンズの焦点に対してトレンチの底部が変位するにしたがって徐々に低い輝度値の出力信号を出力する。同様に、トレンチ付近の試料表面からの反射光が入射する受光素子は、対物レンズの焦点が試料表面上に位置した場合、最も高い輝度値の出力信号を出力し、対物レンズの焦点に対して試料表面が変位するにしたがって徐々に低い輝度値の出力信号を出力する。従って、トレンチの底部からの反射光を受光する受光素子が最大輝度値を検出した時のステージの位置と、トレンチ付近の試料表面からの反射光を受光する受光素子が最大輝度値を検出した時のステージの位置とに基づいてトレンチの底部とトレンチ付近の試料表面との光軸方向の差であるトレンチの深さを測定することができる。
【0022】
図2は、照明ビームの瞳パターン、対物レンズ、及び試料表面における照明状態を示す図である。図2(A)は対物レンズの焦点がトレンチが形成されている試料表面上に位置する状態、すなわちトレンチが形成されている試料表面上に合焦した状態を示し、図2(B)は対物レンズの焦点がトレンチの底面上に位置する状態、すなわちトレンチの底面上に合焦した状態を示す。尚、照明ビームとして、直線偏光した照明光を用いる場合の電界ベクトルの方向も併せて表示する。
【0023】
ライン状の照明ビームは、スリット手段3と対物レンズ6との間の光路中に形成される瞳位置に瞳パターンを形成する。瞳パターンはライン状をなし、その延在方向は、トレンチの延在方向(長手方向)と平行になるように設定する。瞳パターンから出射した照明ビームは対物レンズにより集束され、試料表面上にトレンチ20の長手方向と直交する方向に延在するライン状の照明ビーム21となり、試料表面上にトレンチと直交する方向に延在するライン状の照明エリアが形成される。分解能に関して、トレンチと平行な方向については、対物レンズの開口数に対応した広い角度範囲の照明光が集束するので、十分な分解能が得られる。
【0024】
ライン状照明ビーム21の一方の側のビーム部分21aは、トレンチ20をはさんで一方の側の試料表面に入射し、反対側のビーム分21bはトレンチをはさんで反対側の試料表面に入射し、中間のビーム部分21cはトレンチの開口部に入射する。
【0025】
図2(A)は、対物レンズの焦点が試料表面上に位置した状態を示す。この場合、照明ビーム21のビーム部分21a及び21bは試料表面上に焦線を形成し、高輝度の反射光を発生する。また、中間のビーム部分21cはトレンチ20の内部に進入し、発散性ビームとしてトレンチの底面20aの比較的広い照明エリアを形成し、低輝度の反射光を発生する。図2(B)は、対物レンズの焦点がトレンチの底面20a上に位置した状態を示す。この場合、照明ビームの中間のビーム部分21cはトレンチの底面20a上に集束し、高輝度の反射光を発生する。また、両端のビーム部分21a及び21bは、試料表面の比較的広い領域を照明し、低輝度の反射光を発生する。従って、ステージ移動によりZ軸スキャンを行うことにより、光検出手段からの出力信号に基づいて対物レンズの焦点がトレンチの底面20a上に位置するステージの光軸方向の位置及び対物レンズの焦点がトレンチ周囲の試料表面上に位置する光軸方向の位置が検出される。そして、検出された位置情報を用いて、試料表面及びトレンチの底面の光軸方向の位置が検出され、トレンチの深さを検出することができる。
【0026】
図3は本発明による照明方法と従来の照明方法とを対比した図である。図3(A)は本発明による照明方法を図示し、図3(B)は従来の照明方法を示す。本発明では、瞳位置にトレンチと平行に延在するライン状の瞳パターンを形成し、対物レンズを介して試料表面上にトレンチと直交する方向に延在するライン状の照明エリアを形成する。また、照明光として、直線偏光した照明ビームを用いる。これに対して、従来の照明方法では、瞳位置に円形の瞳パターンが形成され、試料表面上には円形の照明エリアが形成される。
【0027】
図3(B)に示すように、円形の瞳パターンを形成する照明方法では、試料表面に円形の照明エリアが形成されるため、照明ビームの大部分がトレンチ20の周囲の試料表面により遮光され、トレンチ20の内部に進入する照明光量は僅かである。従って、トレンチ幅の狭い高アスペクト比のトレンチの深さを測定するには限界がある。これに対して、トレンチと交差するようにライン状の照明エリアを形成すれば、トレンチ周囲の試料表面により遮光される照明光量が大幅に減少し、トレンチの内部に進入する照明光量が大幅に増大する。
【0028】
次に、Z軸スキャンについて説明する。本発明では、試料と対物レンズの焦点との間の相対距離を変えながらZ軸スキャンを行い、対物レンズの焦点がトレンチが形成されている試料表面上に位置した時の第1の位置を検出すると共に対物レンズの焦点がトレンチの底面上に位置した時の第2の位置を検出し、第1の位置と第2の位置との差分を求め、トレンチの深さ情報として出力する。すなわち、対物レンズの焦点が試料表面上に位置した時、試料表面上には焦線が形成され、試料表面から最大輝度の反射光が発生し、その反射光は光検出手段12により受光される。また、ステージを光軸方向に移動させ、対物レンズの焦点がトレンチの底面上に位置すると、トレンチの底面から最大輝度の反射光が発生し、その反射光は光検出手段12の別の受光素子により受光される。従って、トレンチが形成されている試料表面からの反射光を受光する受光素子が最大輝度値を出力する時点のステージの位置を検出することにより、対物レンズの焦点が試料表面上に位置した際の第1の位置が検出される。また、トレンチの底面からの反射光を受光する受光素子が最大輝度値を出力する時点のステージの位置を検出することにより、対物レンズの焦点がトレンチの底面上に位置した際の第2の位置が検出される。
【0029】
本例では、試料を支持するステージを光軸方向に移動させることによりZ軸スキャンを行う。Z軸スキャンに当たり、ステージの光軸方向の下限位置を設定する。下限位置からステージを徐々に上昇させながら、光検出手段の受光素子の出力信号の輝度値を検出する。同時に、ステージの光軸方向の位置も位置センサにより検出する。ステージがZ軸スキャンの上限位置に到達した時点でZ軸スキャンは終了する。すなわち、本発明では、Z軸スキャン中にトレンチの底面からの反射光及びトレンチを形成する試料表面からの反射光の両方を並行して検出するため、試料表面及びトレンチの底面の光軸方向の位置を1回のZ軸スキャンにより検出することが可能である。図4は、Z軸スキャン中におけるステージの光軸方向の位置に対する光検出手段12の試料表面からの反射光を受光する受光素子からの出力信号の輝度値の変化及びトレンチの底面からの反射光を受光する受光素子からの出力信号の輝度値の変化を示す。実線はトレンチの底面からの反射光を受光する受光素子からの出力信号の輝度値を示し、破線は試料表面からの反射光を受光する受光素子からの出力信号の輝度値を示す。図4に示すように、トレンチの底面からの反射光を受光する受光素子及び試料表面からの反射光を受光する受光素子は光軸方向の変位に対応してピーク輝度値を出力する。従って、2つのピーク輝度値が検出された時点の光軸方向の位置の差分がトレンチの深さに対応する。
【0030】
図5は信号処理装置におけるトレンチ深さを算出するアルゴリズムの一例を示す線図である。信号処理回路10には、光検出手段12の各受光素子から出力される輝度信号が入力する。また、位置センサ9から出力され、ステージの光軸方向の位置を示す位置信号も入力する。光検出手段12から出力された輝度信号は順次増幅器13により増幅され、A/D変換器30によりデジタル信号に変換されて信号処理装置10に入力する。入力した輝度信号は比較器31及びセレクタ32にそれぞれ供給する。セレクタ32により選択された輝度信号は第1のフレームメモリ33に記憶する。第1のフレームメモリ33に記憶されている輝度信号は比較器31及びセレクタ32に供給する。比較器31は、新たに入力した各画素の輝度値とフレームメモリ33に記憶されている各画素の輝度値とを比較し、新たに入力した輝度信号の輝度値が大きい場合、当該輝度信号を選択する選択信号をセレクタ32に出力する。セレクタ32は、比較器からの選択信号を受信した場合、新たに入力した輝度信号を選択して第1のフレームメモリ33に出力する。一方、比較器から選択信号が供給されない場合、フレームメモリに記憶されている輝度信号を出力する。
【0031】
位置センサ9から出力される位置信号は、第2のフレームメモリ34に供給される。第2のフレームメモリ34は、光検出手段の画素に対応するメモリ素子を有し、各メモリ素子ごとに最大輝度値が発生した時点におけるステージの位置を記憶する。第2のフレームメモリ34には、比較器からの選択信号も供給される。供給される選択信号は第2のフレームメモリ26に書込制御信号として作用する。よって、比較器から選択信号が供給された際、距離センサから出力される位置信号がフレームメモリに書き込まれる。
【0032】
本発明では、トレンチの底面からの反射光及びトレンチ付近の試料表面からの反射光の両方を並行して検出する。この場合、トレンチの底面の像及び試料表面の像は光検出手段上において別々の受光素子上に形成されるので、ステージの位置調整を行って、光検出手段上におけるトレンチの底面からの反射光を受光する受光素子及び試料表面からの反射光を受光する受光素子を予め特定しておくことが望ましい。
【0033】
Z軸スキャンの開始に伴い、ステージが上昇を開始する。光検出手段12は試料表面からの反射光及びトレンチの底面からの反射光を受光し、輝度信号を順次出力する。同時に、位置センサ9もステージの光軸方向の位置を検出し、順次位置信号を出力する。Z軸スキャン中に、輝度の高い輝度信号が入力すると、第1及び第2のフレームメモリの内容が順次更新される。そして、対物レンズの焦点が試料表面上に位置すると、試料表面からの反射光を受光する受光素子から最大輝度値が出力され、比較器が選択信号を発生する。この選択信号により最大輝度値が発生した時点のステージの位置が第2のフレームメモリに書き込まれる。さらに、ステージが上昇し、対物レンズの焦点がトレンチの底面に到達すると、トレンチの底面からの反射光を受光する受光素子から最大輝度値が発生する。同時に、比較器から選択信号が発生し、第2のフレームメモリ34に供給され、選択信号の入力に応じて、その時点のステージの位置信号が第2のフレームメモリに書き込まれる。
【0034】
Z軸スキャンが終了すると、試料表面からの反射光を受光する受光素子に対応するメモリ素子の位置信号とトレンチの底面からの反射光を受光する受光素子に対応するメモリ素子の位置信号をそれぞれ差分手段35に出力する。差分手段35は、2つの位置信号の差分を形成し、トレンチの深さ情報として出力する。このように、本発明では、1回のZ軸スキャンを行うだけで、トレンチの深さを測定することが可能である。
【0035】
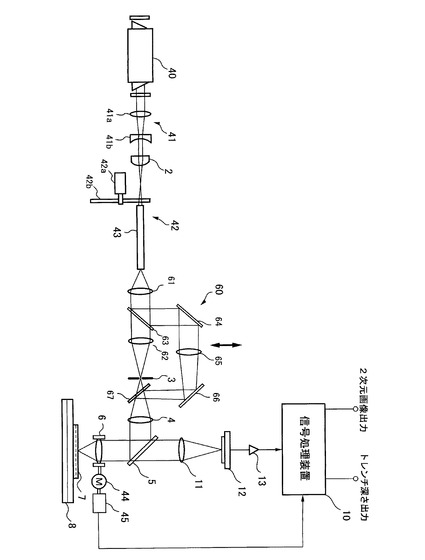
図6は本発明によるトレンチ深さ測定装置の変形例を示す図である。尚、図1で用いた部材と同一の構成要素には同一符号を付して説明する。本例では、照明光として直線偏光したレーザ光を用い、トレンチの側壁に対してS偏光した照明光が入射するように、すなわち、レーザ光の電界ベクトルの振動方向がトレンチの長手方向と平行になるように設定し、トレンチに向かう照明光及びトレンチから出射する反射光がトレンチの側壁により吸収される割合をできるだけ低減させる。照明ビームを発生する光源として、パルス発振型のエキシマレーザ40を用いる。エキシマレーザ40は、例えば193nmの波長の直線偏光したレーザビームを放出する。エキシマレーザ40は、トレンチを含む試料表面を照明する際、トレンチの側壁に対してS偏光したレーザ光が入射するように偏光状態を調整する。エキシマレーザ40から出射したレーザビームは、ビームリデューサ41に入射する。ビームリデューサ41は、凸レンズ41aと凹レンズ41bとが組合わされ、入射したレーザビームのビーム径を小さくする。ビームリデューサ41から出射したレーザビームは、シリンドリカルレンズ2に入射し、一方向(紙面内方向)に集束性を有するレーザビームに変換される。尚、エキシマレーザ40から出射する直線偏光したレーザ光の電界ベクトルの方向は、シリンドリカルレンズ2による集束方向と一致させる。すなわち、後述する対物レンズから出射する直線偏光したライン状照明ビームについて、ライン状ビームの延在方向と電界ベクトルとが互いに直交するように設定する。この場合、ライン状の照明ビームが試料に形成されているトレンチの長手方向と直交するように照明した場合、ライン状照明ビームの電界ベクトルは、トレンチの長手方向と平行になるように設定される。尚、電界ベクトルの方向と瞳パターンとの関係は、図2に示す通りであり、ライン状の瞳パターンの延在方向と電界ベクトルの方向とを一致させる。
【0036】
シリンドリカルレンズ2から出射したレーザビームは、スペックルパターン除去手段42に入射する。スペックルパターン除去手段42はモータ42aとモータ42aに連結した回転拡散板42bと有し、入射したレーザビームはスペックルパターンが時間的に変化するレーザビームに変換される。スペックルパターン除去手段から出射したレーザビームは、合成石英により構成されホモジナイザーとして機能する角ロッド43に入射する。レーザビームを用いて撮像された画像はスペックルパターン有するが、回転拡散板を通過する間に位相分布が変調され、角ロッドを通過する間に断面がほぼ均一な輝度分布のレーザビームに変換される。角ロッド43から出射したレーザビームはスリット手段3に入射する。スリット手段3は、紙面と直交する方向、すなわちシリンドリカルレンズの集束方向と直交する方向に延在するスリット開口を有し、入射したレーザビームはスリット開口を通過し、発散性のライン状ビームとして集束性レンズ4に入射する。集束性レンズ4は、入射したレーザビームに対して、スリット開口の延在方向(紙面と直交する方向)の成分についてはビームを集束するように作用し、スリット開口の延在方向と直交する方向(紙面内方向)の成分については発散性ビームが光軸に平行な平行ビームとなるように作用する。
【0037】
集束性レンズ4から出射したレーザビームは、ビームスプリッタ5で反射し、対物レンズ6に入射する。本例では、ビームスプリッタとしてハーフミラーを用い、直線偏光したレーザビームを対物レンズに入射させる。対物レンズ6は、入射したレーザビームを集束性のライン状照明ビームに変換し、トレンチが形成されている試料表面をライン状の直線偏光した照明ビームにより照明する。
【0038】
図1に示す実施例と同様に、瞳位置に形成されたライン状の瞳パターンは、対物レンズ6により試料表面上に結像され、トレンチと直交するライン状の照明エリアが試料表面上に形成される。よって、トレンチの内部及びトレンチが形成される試料表面の両方を同時に照明する。照明ビームの電界ベクトルの振動方向は、ライン状照明ビームの延在方向と直交する方向に設定されているので、トレンチの内部には、電界ベクトルがトレンチの長手方向と平行に設定されている直線偏光した照明光が入射する。
【0039】
試料7からの反射光、すなわちトレンチの底面からの反射光及びトレンチの周囲の試料表面からの反射光は、対物レンズにより集光され、ビームスプリッタ5及び結像レンズ11を経て光検出手段12に入射する。光検出手段12からの出力信号は、信号処理装置10から供給される駆動信号により順次読み出され、増幅器13により増幅された後、信号処理装置10に供給される。
【0040】
本例では、試料7を支持するステージ8は光軸方向に静止した状態に維持し、対物レンズ6を光軸方向に移動させてZ軸スキャンを行う。対物レンズ6は光軸方向に移動可能に支持されると共にサーボモータ44を連結する。サーボモータ44にエンコーダ45を連結し、対物レンズの光軸方向の位置を検出する。検出された位置情報は、信号処理装置10に供給する。そして、前述した実施例と同様に、信号処理装置10は、光検出手段12から出力信号とエンコーダ44からの位置情報とを用いて試料に形成されたトレンチの深さを算出する。
【0041】
次に、直線偏光した照明光の電界ベクトルの振動方向による作用効果について説明する。トレンチの底面からの反射光を用いて深さ測定する場合、底面からの反射光の光量が少ないと、光検出手段から出力される信号レベルが低くなり、ピーク輝度値の検出精度が低下する不具合が発生する。特に、高アスペクト比のトレンチの深さを測定する場合、対物レンズからトレンチの内部に進行する照明光及びトレンチの底面からの反射光に対するトレンチ側壁による光吸収が問題となる。そこで、照明光の偏光状態(電界ベクトルの振動方向)とトレンチの側壁における反射率との関係について検討した。すなわち、照明光がトレンチの内部に進入する際、トレンチの側壁で反射し或いは反射を繰り返してトレンチの底面に入射する。また、トレンチの底面で反射した反射光も、トレンチの側壁で反射しトレンチから出射する。従って、トレンチの側壁に対する照明光の反射率により、トレンチから出射する反射光の光量が変化することが想定される。そこで、直線偏光した照明光の偏光状態によって、トレンチの側壁に対する反射率がどのように変化するかについて検討した。
【0042】
図7は、結晶シリコンの波長193nmにおける強度反射率(屈折率:0.883,消衰係数2.778)を示すグラフである。このデータは、刊行物「Handbook of Optical Constance of Solids」(Edard D. Palik 著、Academic Press, Boston, 1985)に記載されたデータである。横軸は入射角(度)を示し、縦軸は強度反射率を示す。図7において、実線は結晶シリコンの表面に対してS偏光した照明光が入射した時の強度反射率を示し、破線はP偏光した照明光が入射した時の強度反射率を示す。S偏光は電界ベクトル(電気ベクトル)の振動方向が入射面に対して直交する方向であり、従って、電界ベクトルの振動方向はシリコン結晶の表面と平行である。これに対して、P偏光は、入射面に対して電界ベクトルの振動方向は平行であり、従って、電界ベクトルの振動方向はシリコン結晶の表面に対して直交する方向である。
【0043】
図7を参照するに、入射角が0度付近では、S偏光及びP偏光共に反射率が70%程度である。照明光がS偏光の場合、入射角に対して反射率は徐々に増大し、入射角が60°を超えると反射率は80%以上になる。さらに、入射角が90°になると反射率は100%になる。一方、照明光がP偏光の場合、入射角が大きくなるにしたがって反射率は徐々に低下し、入射角が70°付近で最小値となり、その後徐々に増大し、入射角が90度付近ではS偏光と同様に反射率は100%である。当該データより、シリコン結晶の表面に対する入射角が比較的大きい場合、S偏光の方がP偏光よりも反射率が高いことが示される。
【0044】
上記データをトレンチに入射する照明光について適用する。シリコン基板に形成されたトレンチを直線偏光した照明光で照明する場合、照明光は回折作用を受けるため、トレンチの側壁に対する入射角は90°から若干変位している。光源から出射した照明光はトレンチの側壁で反射しながらトレンチの底面に入射する。トレンチの底面からの反射光も側壁で反射し、トレンチから出射する。従って、トレンチの側壁における反射率が高いほど、照明光のトレンチにおける損失が小さい。従って、上記結晶シリコンの波長193nmにおける強度反射率のデータに基づけば、照明光としてS偏光した光を用い、トレンチに対してS偏光した光を投射することにより、トレンチにおける光損失が低減された深さ測定が可能になる。ここで、S偏光の場合、電界ベクトルの振動方向は入射面に対して垂直であるから、トレンチに入射する際、その電界ベクトルの振動方向はトレンチの側壁に対して平行になり、トレンチの長手方向に対して平行に設定される。
【0045】
図7に示す強度反射率のデータに対する検討結果より、照明光として電界ベクトルの方向がトレンチの長手方向と平行に設定された直線偏光した光を用いることにより、トレンチにより吸収される照明光及び反射光の割合を大幅に減少させることが可能であることが確認された。特に、トレンチの幅が照明光の波長程度に設定されている場合であっても、十分な反射光量が確保される。この検討結果より、スリット幅が照明光の波長にほぼ等しく且つアスペトク比が10程度の高アスペクト比のトレンチであっても、高精度の深さ測定が可能になる。
【0046】
さらに、トレンチの長手方向と直交する方向に延在するライン状の照明ビームを用いると共に照明ビームの電界ベクトルの方向をトレンチの長手方向と平行に設定することによる相乗効果として、光検出手段から出力される輝度信号の信号レベルが相当高くなり、紫外域又は深紫外域(DUV)の照明光を用いて波長レベルの幅(0.2μm程度)のトレンチの深さを高精度に測定することが可能になる。尚、トレンチが導波路として作用する場合、導波モードに応じて群遅延を考慮して、測定結果を補正すればよい。
【0047】
図8は本発明によるトレンチ深さ測定装置の別の変形例を示す図である。本例では、試料表面の2次元画像を撮像する撮像モードと試料に形成されたトレンチの深さを測定する深さ測定モードと有し、試料観察と深さ測定とを選択的に切り換えることができるトレンチ深さ測定装置について説明する。すなわち、撮像モードにおいて試料表面の2次元画像を撮像し、モニタ上に表示される試料表面の2次元画像を見ながら深さ測定されるべきトレンチの位置を調整する。そして、モード切り換えを行い、位置調整されたトレンチの深さは深さ測定モードにおいて測定する。尚、図6で用いた部材と同一の構成要素には同一符号を付し、その説明は省略する。
【0048】
図8を参照するに、ホモジナイザーとして機能する角ロッド43と集束性レンズ4との間の光路中に、スリット手段3をバイパスするためのバイパス光路手段60と、第1及び第2のリレーレンズ61及び62を配置する。第1及び第2のリレーレンズは、角ロッド43とスリット手段3との間に光路中に配置する。バイパス光路手段60は、第1及び第2のリレーレンズの間に配置した第1の全反射ミラー63と、第1の全反射ミラーで反射した照明光を反射する第2の全反射ミラー64と、第2の全反射ミラーから出射した照明光を集束させる集束性レンズ65と、集束性レンズ65から出射した照明光を反射する全反射ミラー66と、全反射ミラー66から出射した照明光を集束性レンズ4に入射させる第4の全反射ミラー67とを有する。これら第1の全反射ミラー63から第4の全反射ミラー67までの光路中に含まれる光学素子は一体的に組み合わされ、一体的に光路に出し入れ可能に構成する。バイパス光路手段60は、試料表面を観察する撮像モードにおいて光路中に配置され、深さ測定モードにおいては光路から外される。
【0049】
試料表面の2次元画像を撮像する撮像モードにおいて、角ロッド43から出射した照明ビームは、第1のリレーレンズ61、第1の全反射ミラー63、第2の全反射ミラー64、集束性レンズ65、第3の全反射ミラー66、及び第4の全反射ミラー67を含むバイパス光路を経て対物レンズ6の照明側の光路に結合される。そして、集束性レンズ4、ビームスプリッタ5及び対物レンズ6経て試料表面の2次元エリアを照明する。そして、試料7の表面からの反射光は、対物レンズにより集光され、ビームスプリッタ及び結像レンズ11を経て2次元撮像素子で構成される光検出手段12に入射する。光検出手段からの出力信号は増幅されて信号処理装置10に供給され、試料表面の2次元画像信号が出力される。よって、オペレータは、モニタ上に表示される試料の2次元画像を見ながら、深さ測定されるトレンチが所望の位置に位置するようにステージの位置を調整する。
【0050】
位置調整が終了した後、モード切り換えを行い、深さ測定モードに切り換える。このモード切り換えによりバイパス光路手段60を照明光学系の光路から取り外され、深さ測定が実行される。深さ測定モードにおいて、角ロッド43から出射したライン状の照明ビームは、第1及び第2のリレーレンズ61及び62を通過し、スリット手段3に入射する。さらに、スリット手段3のスリット開口を通過し、集束性レンズ4及びビームスプリッタ5を経て対物レンズ6に入射する。そして、試料7に形成されたトレンチと直交する方向に延在するライン状の照明ビームとなってトレンチを含む試料表面を照明する。以下、図5に示す実施例に基づいて深さ測定が行われる。
【0051】
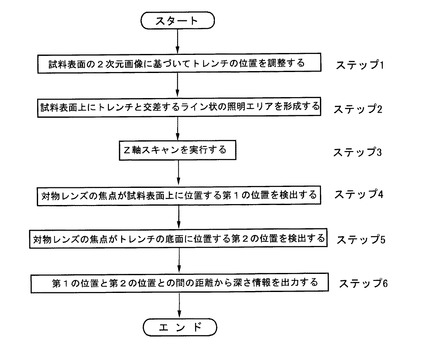
図9は本発明によるトレンチ深さ測定方法のアルゴリズムの一例を示すフローチャートである。ステップ1において、トレンチ深さ測定装置のモードを撮像モードに設定し、試料表面の2次元画像を撮像し、ライン状の照明ビームと交差するようにトレンチの位置を調整する。
【0052】
次に、モード切り換えを行って撮像モードから深さ測定モードに切り換える。続いて、照明光学系を作動させ、試料表面のトレンチと交差するようにライン状の照明エリアを形成する(ステップ2)。
【0053】
続いて、Z軸スキャンを実行する。この際、対物レンズをその上限位置から下限位置まで徐々に下降させる(ステップ3)。対物レンズの下降中、対物レンズの光軸方向の位置を検出し、位置情報として出力する。また、光検出手段上に形成されるトレンチの像及びトレンチ周囲の試料表面の像の輝度値も検出する。そして、図5に示す信号処理を行って最大輝度値を発生する対物レンズの光軸方向の位置を検出する。
【0054】
Z軸スキャン中、初めに対物レンズの焦点が試料表面に近づき、焦点が試料表面上に位置すると、試料表面に焦線が形成される。その際、試料表面からの反射光を受光する受光素子から最大輝度値が出力される。最大輝度値が発生する対物レンズの光軸方向の位置が第1の位置として検出される(ステップ4)。
【0055】
さらに対物レンズが降下すると、対物レンズの焦点はトレンチの底面に近づき、焦点がトレンチの底面上に位置すると、トレンチの像を検出する受光素子から最も高い輝度の輝度信号が出力され、その時点の対物レンズの光軸方向の位置を第2の位置として検出する(ステップ5)。
【0056】
対物レンズが下限位置に到達すると、深さ測定は終了する。そして、試料表面の光軸方向の位置を示す第1の位置とトレンチの底面の光軸方向の位置を示す第2の位置との差分を形成し、トレンチの深さ情報として出力する。
【0057】
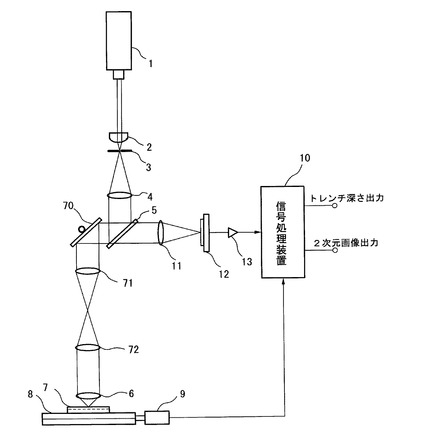
図10は本発明の基本原理を利用した共焦点顕微鏡の構成を示す図である。本例の共焦点顕微鏡は、深さ測定モードと2次元画像撮像モードとの間でモード切り換え可能な共焦点顕微鏡として機能する。尚、図1で用いた構成要素と同一の構成要素には同一符号を付し、その説明は省略する。光源1から出射した照明ビームは、シリンドリカルレンズ2により一方向に集束するライン状の照明ビームに変換され、スリット手段3、集束性レンズ4及びビームスプリッタ5を経てライン状の照明ビームとしてガルバノミラー70に入射する。ガルバノミラーは、試料表面の2次元画像を撮像する撮像モードにおいては、入射したライン状の照明ビームをその延在方向と直交する方向に周期的に偏向する走査装置として機能し、深さ測定モードにおいては静止状態に維持される静止ミラーとして機能する。
【0058】
ガルバノミラー70から出射したライン状の照明ビームは、2つのリレーレンズ71及び72を経て瞳位置にライン状の瞳パターンを形成する。瞳パターンを形成するライン状の照明ビームは、対物レンズ6により集束され、試料7にトレンチと交差するようにライン状の照明エリアを形成する。
【0059】
試料7を支持するステージ8は、対物レンズ6の光軸と直交するX−Y面内で自在に移動することができると共に、対物レンズの光軸方向であるZ方向にも移動する。ステージ8は、撮像モード及び深さ測定モードの両方のモードにおいてZ軸スキャンを行う。従って、撮像モードにおいては、試料表面はライン状の照明ビームにより走査されると共にZ軸方向にも走査されることになる。一方、深さ測定モードにおいては、ガルバノミラーは固定ミラーとして機能するため、試料表面はライン状照明ビームによりZ軸方向にそって1次元スキャンされることになる。ステージ8には、Z軸方向の位置を検出する位置センサ9を連結する。位置センサ9は、Z軸スキャン中にステージの光軸方向の位置を検出し、検出した位置情報を信号処理装置10に出力する。
【0060】
試料7からの反射光、すなわちトレンチの底部からの反射光及びトレンチ周囲の試料表面からの反射光は、対物レンズにより集光され、リレーレンズ72及び71、ガルバノミラー70、ビームスプリッタ5及び結像レンズ11を経て光検出手段12に入射する。本例では、光検出手段として、複数の受光素子がライン状に配列されたラインセンサを用いる。光検出手段からの出力信号は、信号処理装置10から供給される駆動信号により順次読み出され、増幅器13により増幅された後、信号処理装置10に供給される。信号処理装置10は、光検出手段から出力される輝度信号と位置センサ9からの位置情報とを用いて図5に基づく処理を行い、各画素について、Z軸スキャン中に検出された最大輝度値をメモリに記憶すると共に最大輝度値を発生した時点のステージの光軸方向の位置を検出してメモリに記憶する。
【0061】
試料表面の2次元画像を撮像する撮像モードにおいて、各画素が最大輝度値により構成される試料表面の2次元画像が出力されると共に最大輝度値を発生するステージの位置情報、すなわち試料表面の形状情報も出力される。よって、試料表面の3次元画像を出力することができる。一方、深さ測定モードにおいては、ガルバノミラー70は静止し、ステージ移動によるZ軸スキャンだけが行われるので、信号処理装置は、試料表面の光軸方向の位置を示す第1の位置とトレンチの底面の光軸方向の位置を示す第2の位置とに基づき、トレンチの深さ情報を出力する。
【0062】
本発明は上述した実施例だけに限定されず、種々の変形や変更が可能である。例えば、上述した実施例では、センサ手段によりステージ又は対物レンズの光軸方向の位置を検出し位置情報として出力したが、ステージ及び対物レンズの移動量を用いて位置情報として利用することも可能である。さらに、対物レンズに距離センサを固定し、距離センサにより対物レンズと試料との間の距離を測定し、測定された距離情報を用いてステージ又は対物レンズの光軸方向の変位量を求めることも可能である。
【0063】
さらに、トレンチの幅が測定値に影響を与える場合は、画像より求めたトレンチの幅の値を用いて深さの測定値を補正することも可能である。
【符号の説明】
【0064】
1 光源
2 シリンドリカルレンズ
3 スリット手段
4 集束性レンズ
5 ビームスプリッタ
6 対物レンズ
7 試料
8 ステージ
9 位置センサ
10 信号処理装置
11 結像レンズ
12 光検出手段
13 増幅器
20 照明ビーム
30 A/D変換器
31 比較器
32 セレクタ
33 第1のフレームメモリ
34 第2のフレームメモリ
35 差分手段
40 エキシマレーザ
41 ビームリデューサ
42 スペックルパターン除去手段
43 角ロッド
44 サーボモータ
45 エンコーダ
【特許請求の範囲】
【請求項1】
試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具えることを特徴とするトレンチ深さ測定装置。
【請求項2】
請求項1に記載のトレンチ深さ測定装置において、前記光源装置は、照明ビームを放出する光源と、光源から出射した照明ビームをライン状の照明ビームに変換するシリンドリカルレンズと、シリンドリカルから出射したライン状の照明ビームを通過させるスリット状の開口部を有するスリット手段とを有し、
前記スリット手段、前記試料及び光検出手段は共役な位置に配置されることを特徴とするトレンチ深さ測定装置。
【請求項3】
試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
直線偏光した照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具え、
前記試料表面に入射する照明ビームを構成する直線偏光した光の電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定されることを特徴とするトレンチ深さ測定装置。
【請求項4】
請求項3に記載のトレンチ深さ測定装置において、前記照明光学系から直線偏光した光により構成されるライン状照明ビームが出射し、ライン状照明ビームの延在方向と電界ベクトルの方向とが互いにほぼ直交することを特徴とするトレンチ深さ測定装置。
【請求項5】
請求項1から4までのいずれか1項に記載のトレンチ深さ測定装置において、前記光源装置は、直線偏光したレーザ光を放出するレーザ光源と、レーザ光源から出射したレーザビームをライン状の照明ビームに変換するシリンドリカルレンズと、シリンドリカルから出射したライン状の照明ビームを通過させるスリット状の開口部を有するスリット手段とを有し、
前記スリット手段、前記試料及び光検出手段は共役な関係に配置されていることを特徴とするトレンチ深さ測定装置。
【請求項6】
請求項2又は5に記載のトレンチ深さ測定装置において、前記信号処理装置は、Z軸スキャン中に光検出手段から出力される輝度信号と前記センサ手段から出力される位置情報とに基づき、前記対物レンズの焦点がトレンチ周囲の試料表面上に位置した時の前記対物レンズ又はステージの光軸方向の第1の位置と、対物レンズの焦点がトレンチの底部に位置した時の前記対物レンズ又はステージの光軸方向の第2の位置とを求める手段と、第1の位置と第2の位置との間の距離を算出する手段とを有し、第1の位置と第2の位置との間の距離をトレンチの深さとして出力することを特徴とするトレンチ深さ測定装置。
【請求項7】
請求項6に記載のトレンチ深さ測定装置において、前記信号処理装置は、Z軸スキャン中にトレンチ周囲の試料表面からの反射光の輝度値が最大となる光軸方向の位置を第1の位置として検出し、トレンチの底部からの反射光の輝度値が最大となる光軸方向の位置を第2の位置として検出することを特徴とするトレンチ深さ測定装置。
【請求項8】
請求項5に記載のトレンチ深さ測定装置において、前記シリンドリカルレンズとスリット手段との間の光路中に、レーザビーム中に含まれるスペックルパターンを除去ないし低減するスペックルパターン除去装置が配置されていることを特徴とするトレンチ深さ測定装置。
【請求項9】
請求項5から8までのいずれか1項に記載のトレンチ深さ測定装置において、前記レーザ光源は、半導体レーザ、又は紫外域又は深紫外域(DUV)の照明光を発生するパルス発振型又は連続発振型のエキシマレーザで構成したことを特徴とするトレンチ深さ測定装置。
【請求項10】
請求項1から9までのいずれか1項に記載のトレンチ深さ測定装置において、前記対物レンズと光検出手段との間の光路中に、試料に向かうライン状照明ビームと試料からの反射光とを分離するビームスプリッタが配置され、当該ビームスプリッタはハーフミラーにより構成され、直線偏光したライン状の照明ビームが対物レンズを介して試料に入射することを特徴とするトレンチ深さ測定装置。
【請求項11】
請求項1から10までのいずれか1項に記載のトレンチ深さ測定装置において、前記光検出手段は、複数の受光素子が2次元アレイ状に配列されているエリアセンサ、又は複数の受光素子がライン状に配列されているラインセンサにより構成したことを特徴とするトレンチ深さ測定装置。
【請求項12】
トレンチが形成されている試料表面の2次元画像を撮像する撮像モードとトレンチの深さを測定する深さ測定モードとの間で切り換え可能なトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記トレンチが形成されている試料表面を照明する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ周囲の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
深さ測定モードにおいて、前記光検出手段から出力される輝度信号と前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力し、撮像モードにおいては、前記光検出手段から出力される輝度信号に基づいて試料表面の2次元画像情報を出力する信号処理装置とを具え、
前記照明光学系は、深さ測定モードにおいて、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成し、撮像モードにおいては、試料表面の2次元エリアを照明することを特徴とするトレンチ深さ測定装置。
【請求項13】
請求項12に記載のトレンチ深さ測定装置において、前記光源装置は、照明ビームを放出する光源と、光源から出射した照明ビームをライン状の照明ビームに変換するシリンドリカルレンズと、シリンドリカルから出射したライン状の照明ビームを通過させるスリット状の開口部を有するスリット手段と、光路中に選択的に配置され、スリット手段をバイパスさせるバイパス光路手段とを有し、
前記撮像モードにおいて、光路中にバイパス光路手段が挿入され、前記シリンドリカルレンズから出射した照明ビームはバイパス光路手段を経て対物レンズに入射し、
前記深さ測定モードにおいては、バイパス光路手段が光路から外され、シリンドリカルレンズから出射したライン状の照明ビームはスリット手段を経て対物レンズに入射することを特徴とするトレンチ深さ測定装置。
【請求項14】
請求項13に記載のトレンチ深さ測定装置において、前記光源として直線偏光した照明ビームを発生するレーザが用いられ、深さ測定モードにおいて、照明ビームの電界ベクトルの方向は、深さ測定されるトレンチの長手方向とほぼ平行に設定されることを特徴とするトレンチ深さ測定装置。
【請求項15】
試料に形成されたトレンチの深さを測定するトレンチ深さ測定方法であって、
光源と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する工程と、
試料表面と対物レンズとの間の相対距離を変化させることによりZ軸スキャンを行う工程と、
前記Z軸スキャン中に、対物レンズの焦点がトレンチ周囲の試料表面上に位置した時の対物レンズ又はステージの光軸方向の位置を示す第1の位置と、対物レンズの焦点がトレンチの底面に位置した時の対物レンズ又はステージの光軸方向の位置を示す第2の位置とを検出する位置検出工程と、
検出された第1の位置と第2の位置との間の距離をトレンチの深さ情報として出力する工程とを含むことを特徴とするトレンチ深さ測定方法。
【請求項16】
請求項15に記載のトレンチ深さ測定方法において、前記位置検出工程において、試料表面からの反射光の輝度が最大となる光軸方向の位置を第1の位置として検出し、トレンチの底面からの反射光の輝度が最大となる光軸方向の位置を第2の位置として検出することを特徴とするトレンチ深さ測定方法。
【請求項17】
試料に形成されたトレンチを観察するための共焦点顕微鏡であって、
観察されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記照明ビームを前記トレンチを含む試料表面内で相対的に走査する走査手段と、
前記トレンチ部分からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号に基づき、トレンチを含む試料表面の2次元画像を形成する信号処理装置とを有することを特徴とする共焦点顕微鏡。
【請求項1】
試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具えることを特徴とするトレンチ深さ測定装置。
【請求項2】
請求項1に記載のトレンチ深さ測定装置において、前記光源装置は、照明ビームを放出する光源と、光源から出射した照明ビームをライン状の照明ビームに変換するシリンドリカルレンズと、シリンドリカルから出射したライン状の照明ビームを通過させるスリット状の開口部を有するスリット手段とを有し、
前記スリット手段、前記試料及び光検出手段は共役な位置に配置されることを特徴とするトレンチ深さ測定装置。
【請求項3】
試料に形成されたトレンチの深さを測定するトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
直線偏光した照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ付近の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号と、前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力する信号処理装置とを具え、
前記試料表面に入射する照明ビームを構成する直線偏光した光の電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定されることを特徴とするトレンチ深さ測定装置。
【請求項4】
請求項3に記載のトレンチ深さ測定装置において、前記照明光学系から直線偏光した光により構成されるライン状照明ビームが出射し、ライン状照明ビームの延在方向と電界ベクトルの方向とが互いにほぼ直交することを特徴とするトレンチ深さ測定装置。
【請求項5】
請求項1から4までのいずれか1項に記載のトレンチ深さ測定装置において、前記光源装置は、直線偏光したレーザ光を放出するレーザ光源と、レーザ光源から出射したレーザビームをライン状の照明ビームに変換するシリンドリカルレンズと、シリンドリカルから出射したライン状の照明ビームを通過させるスリット状の開口部を有するスリット手段とを有し、
前記スリット手段、前記試料及び光検出手段は共役な関係に配置されていることを特徴とするトレンチ深さ測定装置。
【請求項6】
請求項2又は5に記載のトレンチ深さ測定装置において、前記信号処理装置は、Z軸スキャン中に光検出手段から出力される輝度信号と前記センサ手段から出力される位置情報とに基づき、前記対物レンズの焦点がトレンチ周囲の試料表面上に位置した時の前記対物レンズ又はステージの光軸方向の第1の位置と、対物レンズの焦点がトレンチの底部に位置した時の前記対物レンズ又はステージの光軸方向の第2の位置とを求める手段と、第1の位置と第2の位置との間の距離を算出する手段とを有し、第1の位置と第2の位置との間の距離をトレンチの深さとして出力することを特徴とするトレンチ深さ測定装置。
【請求項7】
請求項6に記載のトレンチ深さ測定装置において、前記信号処理装置は、Z軸スキャン中にトレンチ周囲の試料表面からの反射光の輝度値が最大となる光軸方向の位置を第1の位置として検出し、トレンチの底部からの反射光の輝度値が最大となる光軸方向の位置を第2の位置として検出することを特徴とするトレンチ深さ測定装置。
【請求項8】
請求項5に記載のトレンチ深さ測定装置において、前記シリンドリカルレンズとスリット手段との間の光路中に、レーザビーム中に含まれるスペックルパターンを除去ないし低減するスペックルパターン除去装置が配置されていることを特徴とするトレンチ深さ測定装置。
【請求項9】
請求項5から8までのいずれか1項に記載のトレンチ深さ測定装置において、前記レーザ光源は、半導体レーザ、又は紫外域又は深紫外域(DUV)の照明光を発生するパルス発振型又は連続発振型のエキシマレーザで構成したことを特徴とするトレンチ深さ測定装置。
【請求項10】
請求項1から9までのいずれか1項に記載のトレンチ深さ測定装置において、前記対物レンズと光検出手段との間の光路中に、試料に向かうライン状照明ビームと試料からの反射光とを分離するビームスプリッタが配置され、当該ビームスプリッタはハーフミラーにより構成され、直線偏光したライン状の照明ビームが対物レンズを介して試料に入射することを特徴とするトレンチ深さ測定装置。
【請求項11】
請求項1から10までのいずれか1項に記載のトレンチ深さ測定装置において、前記光検出手段は、複数の受光素子が2次元アレイ状に配列されているエリアセンサ、又は複数の受光素子がライン状に配列されているラインセンサにより構成したことを特徴とするトレンチ深さ測定装置。
【請求項12】
トレンチが形成されている試料表面の2次元画像を撮像する撮像モードとトレンチの深さを測定する深さ測定モードとの間で切り換え可能なトレンチ深さ測定装置であって、
深さ測定されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記トレンチが形成されている試料表面を照明する照明光学系と、
前記対物レンズと試料との間の光軸方向の相対距離を変化させてZ軸スキャンを行うスキャン手段と、
Z軸スキャン中における対物レンズ又はステージの光軸方向の位置或いは対物レンズとステージとの間の光軸方向の距離を検出し、位置情報又は距離情報として出力するセンサ手段と
トレンチ周囲の試料表面からの反射光及びトレンチの底部からの反射光を前記対物レンズを介して受光する光検出手段と、
深さ測定モードにおいて、前記光検出手段から出力される輝度信号と前記センサ手段から出力される位置情報又は距離情報とに基づいてトレンチの深さ情報を出力し、撮像モードにおいては、前記光検出手段から出力される輝度信号に基づいて試料表面の2次元画像情報を出力する信号処理装置とを具え、
前記照明光学系は、深さ測定モードにおいて、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成し、撮像モードにおいては、試料表面の2次元エリアを照明することを特徴とするトレンチ深さ測定装置。
【請求項13】
請求項12に記載のトレンチ深さ測定装置において、前記光源装置は、照明ビームを放出する光源と、光源から出射した照明ビームをライン状の照明ビームに変換するシリンドリカルレンズと、シリンドリカルから出射したライン状の照明ビームを通過させるスリット状の開口部を有するスリット手段と、光路中に選択的に配置され、スリット手段をバイパスさせるバイパス光路手段とを有し、
前記撮像モードにおいて、光路中にバイパス光路手段が挿入され、前記シリンドリカルレンズから出射した照明ビームはバイパス光路手段を経て対物レンズに入射し、
前記深さ測定モードにおいては、バイパス光路手段が光路から外され、シリンドリカルレンズから出射したライン状の照明ビームはスリット手段を経て対物レンズに入射することを特徴とするトレンチ深さ測定装置。
【請求項14】
請求項13に記載のトレンチ深さ測定装置において、前記光源として直線偏光した照明ビームを発生するレーザが用いられ、深さ測定モードにおいて、照明ビームの電界ベクトルの方向は、深さ測定されるトレンチの長手方向とほぼ平行に設定されることを特徴とするトレンチ深さ測定装置。
【請求項15】
試料に形成されたトレンチの深さを測定するトレンチ深さ測定方法であって、
光源と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する工程と、
試料表面と対物レンズとの間の相対距離を変化させることによりZ軸スキャンを行う工程と、
前記Z軸スキャン中に、対物レンズの焦点がトレンチ周囲の試料表面上に位置した時の対物レンズ又はステージの光軸方向の位置を示す第1の位置と、対物レンズの焦点がトレンチの底面に位置した時の対物レンズ又はステージの光軸方向の位置を示す第2の位置とを検出する位置検出工程と、
検出された第1の位置と第2の位置との間の距離をトレンチの深さ情報として出力する工程とを含むことを特徴とするトレンチ深さ測定方法。
【請求項16】
請求項15に記載のトレンチ深さ測定方法において、前記位置検出工程において、試料表面からの反射光の輝度が最大となる光軸方向の位置を第1の位置として検出し、トレンチの底面からの反射光の輝度が最大となる光軸方向の位置を第2の位置として検出することを特徴とするトレンチ深さ測定方法。
【請求項17】
試料に形成されたトレンチを観察するための共焦点顕微鏡であって、
観察されるべきトレンチが形成されている試料を支持するステージと、
照明ビームを発生する光源装置及び照明ビームを前記試料に向けて投射する対物レンズを有し、前記光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成し、前記トレンチが形成されている試料表面にトレンチと交差するライン状の照明エリアを形成する照明光学系と、
前記照明ビームを前記トレンチを含む試料表面内で相対的に走査する走査手段と、
前記トレンチ部分からの反射光を前記対物レンズを介して受光する光検出手段と、
光検出手段から出力される輝度信号に基づき、トレンチを含む試料表面の2次元画像を形成する信号処理装置とを有することを特徴とする共焦点顕微鏡。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−113650(P2013−113650A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258673(P2011−258673)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000115902)レーザーテック株式会社 (184)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000115902)レーザーテック株式会社 (184)
【Fターム(参考)】
[ Back to top ]