
トレーラーのスネーキング現象防止方法及びシステム
【課題】牽引車側でのエンジンブレーキ時にのみトレーラーのみにその電磁ブレーキで制動力を加えてスネーキング現象を防止することにより、牽引車の運転者がブレーキペダルを踏むまでの空走距離を短縮するとともに、牽引車及びトレーラーに既設の制動装置をそのまま利用して、スネーキング現象防止のための所期の制動制御を簡単に実現できるようにする。
【解決手段】牽引車1とトレーラー2とに、それぞれの加速度を検知する牽引車側加速度センサ11とトレーラー側加速度センサ12を搭載し、牽引車側においてブレーキペダル14によるブレーキ操作が行われたか否かを検知し、その操作が行われていないときに牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキ21を作動させてトレーラーを制動する。
【解決手段】牽引車1とトレーラー2とに、それぞれの加速度を検知する牽引車側加速度センサ11とトレーラー側加速度センサ12を搭載し、牽引車側においてブレーキペダル14によるブレーキ操作が行われたか否かを検知し、その操作が行われていないときに牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキ21を作動させてトレーラーを制動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トラベルトレーラーやレジャーボート用のトレーラーなどで、例えば下り坂を走行中に、牽引車とトレーラーのブレーキ性能の違いや牽引車側のエンジンブレーキの作用により両車の加速度の違いが発生すると、トレーラーが、牽引車を押すようになり走行が不安定になるスネーキング現象を防止する方法及びシステムに関する。
【背景技術】
【0002】
従来、電磁ブレーキを搭載したトレーラーを制動する場合、牽引車側の加速度をモニタし牽引車のブレーキペダルを踏むと、牽引車側で減速した加速度に応じてトレーラー側の電磁ブレーキを制御していたため、牽引車側でのエンジンブレーキの減速ではトレーラー側の電磁ブレーキが作動せず、牽引車側の減速とトレーラー側との減速に時差が生じていた。そのためブレーキングのコントロールが難しく、レーラーが後ろから牽引車を押して走行が不安定になるスネーキング現象がしばしば起きる要因になっていた。
【0003】
特許文献1(特開平8−169325号公報)には、次のようなトレーラ制動力総合制御装置が開示されている。
トレーラを牽引するトラクタに設けられるブレーキペダルの操作に連動してエアタンクから空気圧をトラクタ及びトレーラの各車輪のブレーキチャンバに供給するエアーブレーキ式であって、トラクタ及びトレーラの各車輪のブレーキチャンバへの空気圧配管に各々設けられた電磁弁と、トラクタ及びトレーラの各車輪の速度を検出する速度センサと、トラクタのブレーキペダルの変位を検出する変位センサと、トラクタに設けられた加速度センサと、トレーラの荷重センサと、速度センサ、変位センサ、加速度センサ及び荷重センサの信号を入力し、トラクタ及びトレーラの各車輪のブレーキトルクを計算し、各電磁弁に信号を出力して、各車輪のブレーキチャンバを作動させる制御装置とを備えてなる。
【0004】
しかし、これは、主にエアーブレーキを使用し、電磁弁を制御して制動する大型トレーラ車を対象にしている。
また、各種のセンサを用いて、エンジンブレーキ時及びフットブレーキペダルによるブレーキ作動時にトラクタとトレーラの双方の制動力を、各種の変動要素に基づいて最後まで総合的に制御することを意図しており、高価な装置になってしまう。
【特許文献1】特開平8−169325号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の課題は、トラベルトレーラーなど比較的軽量なトレーラーを自家用自動車で牽引する場合を対象とし、牽引車側でのエンジンブレーキ時にのみトレーラーのみにその電磁ブレーキで制動力を加えてスネーキング現象を防止することにより、牽引車の運転者がブレーキペダルを踏むまでの空走距離を短縮するとともに、牽引車及びトレーラーに既設の制動装置をそのまま利用して、スネーキング現象防止のための所期の制動制御を簡単に実現できるようにすることにある。
【課題を解決するための手段】
【0006】
請求項1に係る発明のスネーキング現象防止方法は、牽引車とこれに牽引されるトレーラーとに、それぞれの加速度を検知する牽引車側加速度センサとトレーラー側加速度センサとをそれぞれ搭載し、牽引車側においてブレーキペダルによるブレーキ操作が行われたか否かを検知し、そのブレーキ操作が行われていないときに前記牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させてトレーラーを制動する。
【0007】
その具体的形態である請求項2に係る発明は、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させる。
【0008】
請求項3に係る発明のスネーキング現象防止システムは、牽引車に搭載されてその加速度を検知する牽引車側加速度センサと、牽引車に牽引されるトレーラーに搭載されてその加速度を検知するトレーラー側加速度センサと、牽引車に搭載されてそのブレーキペダルによるブレーキ操作の有無を検知するブレーキペダル操作検知手段と、このブレーキペダル操作検知手段がブレーキ操作が行われていないことを検知しているときに、牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させる制御手段とからなる。
【0009】
その具体的形態である請求項4に係る発明は、制御手段が、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させる。
【0010】
同じく請求項5に係る発明は、制御手段が、牽引車側加速度センサからの加速度に応じた出力とトレーラー側加速度センサからの加速度に応じた出力との差を、パルス幅変調して取り出す。
【発明の効果】
【0011】
本発明によると、牽引車側においてブレーキペダルによるブレーキ操作が行われていないときに牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させてトレーラーを制動するので、牽引車側でのエンジンブレーキ時にのみトレーラーのみにその電磁ブレーキで制動力を加えてスネーキング現象を防止でき、牽引車の運転者がブレーキペダルを踏むまでの空走距離を短縮するとともに、牽引車及びトレーラーに既設の制動装置をそのまま利用して、スネーキング現象防止のための所期の制動制御を簡単に実現できる。
【0012】
請求項2及び請求項4に係る発明では、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させるので、スネーキング現象の防止をより確実に行える。
【0013】
請求項5に係る発明によると、牽引車とトレーラーとの加速度差を簡単に検知できる。
【発明を実施するための最良の形態】
【0014】
次に、本発明の実施例を図面に基づいて詳細に説明する。
【実施例】
【0015】
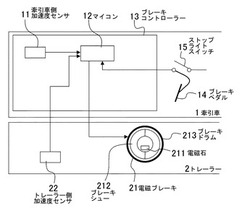
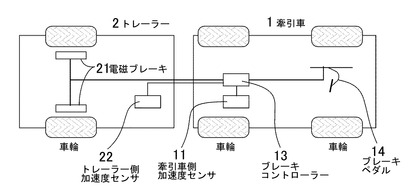
図1及び図2に、牽引車1側の構成とこれに牽引されるトレーラー2側の構成とを併せた、本発明によるスネーキング現象防止システムの全体構成を示す。
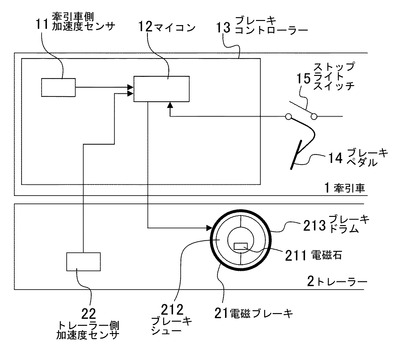
牽引車1には、その加速度を検知する牽引車側加速度センサ11及びマイコン(マイクロコンピュータ)12を含むブレーキコントローラ13が搭載されている。ブレーキコントローラ13には、牽引車1のブレーキペダル14の操作によりオン・オフするストップライトスイッチ15が、牽引車1上で接続され、ブレーキコントローラ13は、このストップライトスイッチ15をブレーキペダル操作検知手段として、ブレーキペダル14によるブレーキ操作が行われたか否かを判断する。
【0016】
一方、トレーラー2には、その車輪を制動する電磁ブレーキ21の他に、トレーラー2の加速度を検知するトレーラー側加速度センサ22が搭載され、これらは牽引車1側のブレーキコントローラ13に接続される。
【0017】
マイコン12は、ストップライトスイッチ15からの信号に従い、牽引車側加速度センサ11とトレーラー側加速度センサ22との加速度を比較し、その結果に基づいて電磁ブレーキ21を制御する制御手段であって、CPU、メモリ(ROM及びRAM)、入出力インターフェイスなどを含んで構成されている。
【0018】
電磁ブレーキ21は、電磁石211が、図示しないカムアームを介してブレーキシュー212をブレーキドラム213に押し付け、ブレーキシュー212とブレーキドラム213の摩擦によりトレーラー2の車輪を制動する構成になっている。
【0019】
次に、各構成要素の作用について図2を参照して詳細に説明する。
ストップライトスイッチ15は、牽引車1のブレーキペダル14が作動時にスイッチON、不作動時にスイッチOFFになり、そのON/OFF時間に比例したパルスを発生させてその信号をマイコン12へ伝える。
【0020】
牽引車側加速度センサ11は、牽引車1側の加速度を検知しマイコン12にデータを渡す。
トレーラー側加速度センサ22は、トレーラー2側の加速度を検知しマイコン12にデータを渡す。
マイコン12は、牽引車側加速度センサ11が検知した牽引車1の加速度と、トレーラー側加速度センサ22が検知したトレーラー2の加速度とを、牽引車1のブレーキペダル14がスイッチOFFのときに比較する。
【0021】
ブレーキコントローラ13は、牽引車1のブレーキペダル14がスイッチOFFのときの両加速度センサ11・22の加速度を比較した結果、牽引車1よりもトレーラー2の方がマイナス加速度が上回る場合、そのマイナス加速度に応じたパルス幅変調と呼ばれるパルスを発生させ、電磁ブレーキ21にその信号を送信して電磁ブレーキ21を作動させる。
【0022】
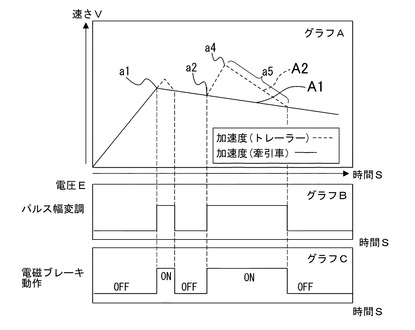
図3は、牽引車及びトレーラーの加速度の推移と、パルス幅変調動作と、パルス幅変調によりコントロールされる電磁ブレーキの動作を表したグラフである。同図のAのグラフは、牽引車及びトレーラーの加速度の推移を示し、縦軸は速さ(V)を、横軸は時間(S)を表す。A1の折れ線は牽引車1の加速度であり、A2の折れ線はトレーラー2の加速度である。折れ線はスピードが増し、加速度が上がると折れ線が右肩上がりとなる。また、エンジンブレーキで加速度が下がると右肩下がりとなる。Bのグラフは、牽引車1とトレーラー2との加速度の差をブレーキコントローラ13がパルス幅変調したものである。Cのグラフは、パルス幅変調により発生したパルスにより作動する電磁ブレーキ21の動作状態である。
【0023】
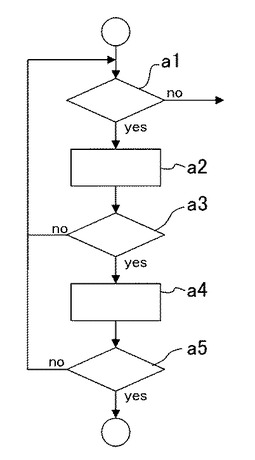
次に、図3のグラフ及び図4のフローチャートを参照して本実施例の一連の動作について説明する。図4のフローチャートにおけるステップa1〜a5は、図3のグラフ中の時点a1〜a5と対応している。
【0024】
車が勾配や渋滞やカーブなど何かのタイミングで減速すると、まずストップライトスイッチ15によりブレーキペダル14が作動しているかを検知する。ストップライトスイッチ15がONの場合は、マイコン12を介してブレーキコントローラ13により電磁ブレーキ21を作動させる。(ステップa1)。
【0025】
ストップライトスイッチ15がOFFの場合、マイコン12は、牽引車側加速度センサ11が検知した牽引車1の加速度と、トレーラー側加速度センサ22が検知したトレーラー2の加速度との差を計算する。(ステップa2)
牽引車側加速度センサ11の加速度がトレーラー側加速度センサ22の加速度を上回らない場合には、ステップa1へ戻る。(ステップa3)。
【0026】
一方、トレーラー側加速度センサ22が検知したトレーラー2の加速度が牽引車側加速度センサ11が検知した牽引車1の加速を上回る場合、マイコン12を介してブレーキコントローラ13により電磁ブレーキ21を作動させる(ステップa4)。マイコン12は、トレーラー側加速度センサ22の加速度が牽引車側加速度センサ11の加速度を下回るまで上記の動作を繰り返す。(ステップa5)
【図面の簡単な説明】
【0027】
【図1】本発明によるスネーキング現象防止システムの模式図である。
【図2】その構成を示すブロック図である。
【図3】牽引車及びトレーラーの加速度の推移と、パルス幅変調動作と、パルス幅変調によりコントロールされる電磁ブレーキの動作を表したグラフである。
【図4】一連の動作を示すフローチャートである。
【符号の説明】
【0028】
1 牽引車
2 トレーラー
11 牽引車側加速度センサ
12 マイコン
13 ブレーキコントローラ
14 ブレーキペダル
15 ストップライトスイッチ
21 電磁ブレーキ
22 トレーラー側加速度センサ
211 電磁石
212 ブレーキシュー
213 ブレーキドラム
【技術分野】
【0001】
本発明は、トラベルトレーラーやレジャーボート用のトレーラーなどで、例えば下り坂を走行中に、牽引車とトレーラーのブレーキ性能の違いや牽引車側のエンジンブレーキの作用により両車の加速度の違いが発生すると、トレーラーが、牽引車を押すようになり走行が不安定になるスネーキング現象を防止する方法及びシステムに関する。
【背景技術】
【0002】
従来、電磁ブレーキを搭載したトレーラーを制動する場合、牽引車側の加速度をモニタし牽引車のブレーキペダルを踏むと、牽引車側で減速した加速度に応じてトレーラー側の電磁ブレーキを制御していたため、牽引車側でのエンジンブレーキの減速ではトレーラー側の電磁ブレーキが作動せず、牽引車側の減速とトレーラー側との減速に時差が生じていた。そのためブレーキングのコントロールが難しく、レーラーが後ろから牽引車を押して走行が不安定になるスネーキング現象がしばしば起きる要因になっていた。
【0003】
特許文献1(特開平8−169325号公報)には、次のようなトレーラ制動力総合制御装置が開示されている。
トレーラを牽引するトラクタに設けられるブレーキペダルの操作に連動してエアタンクから空気圧をトラクタ及びトレーラの各車輪のブレーキチャンバに供給するエアーブレーキ式であって、トラクタ及びトレーラの各車輪のブレーキチャンバへの空気圧配管に各々設けられた電磁弁と、トラクタ及びトレーラの各車輪の速度を検出する速度センサと、トラクタのブレーキペダルの変位を検出する変位センサと、トラクタに設けられた加速度センサと、トレーラの荷重センサと、速度センサ、変位センサ、加速度センサ及び荷重センサの信号を入力し、トラクタ及びトレーラの各車輪のブレーキトルクを計算し、各電磁弁に信号を出力して、各車輪のブレーキチャンバを作動させる制御装置とを備えてなる。
【0004】
しかし、これは、主にエアーブレーキを使用し、電磁弁を制御して制動する大型トレーラ車を対象にしている。
また、各種のセンサを用いて、エンジンブレーキ時及びフットブレーキペダルによるブレーキ作動時にトラクタとトレーラの双方の制動力を、各種の変動要素に基づいて最後まで総合的に制御することを意図しており、高価な装置になってしまう。
【特許文献1】特開平8−169325号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の課題は、トラベルトレーラーなど比較的軽量なトレーラーを自家用自動車で牽引する場合を対象とし、牽引車側でのエンジンブレーキ時にのみトレーラーのみにその電磁ブレーキで制動力を加えてスネーキング現象を防止することにより、牽引車の運転者がブレーキペダルを踏むまでの空走距離を短縮するとともに、牽引車及びトレーラーに既設の制動装置をそのまま利用して、スネーキング現象防止のための所期の制動制御を簡単に実現できるようにすることにある。
【課題を解決するための手段】
【0006】
請求項1に係る発明のスネーキング現象防止方法は、牽引車とこれに牽引されるトレーラーとに、それぞれの加速度を検知する牽引車側加速度センサとトレーラー側加速度センサとをそれぞれ搭載し、牽引車側においてブレーキペダルによるブレーキ操作が行われたか否かを検知し、そのブレーキ操作が行われていないときに前記牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させてトレーラーを制動する。
【0007】
その具体的形態である請求項2に係る発明は、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させる。
【0008】
請求項3に係る発明のスネーキング現象防止システムは、牽引車に搭載されてその加速度を検知する牽引車側加速度センサと、牽引車に牽引されるトレーラーに搭載されてその加速度を検知するトレーラー側加速度センサと、牽引車に搭載されてそのブレーキペダルによるブレーキ操作の有無を検知するブレーキペダル操作検知手段と、このブレーキペダル操作検知手段がブレーキ操作が行われていないことを検知しているときに、牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させる制御手段とからなる。
【0009】
その具体的形態である請求項4に係る発明は、制御手段が、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させる。
【0010】
同じく請求項5に係る発明は、制御手段が、牽引車側加速度センサからの加速度に応じた出力とトレーラー側加速度センサからの加速度に応じた出力との差を、パルス幅変調して取り出す。
【発明の効果】
【0011】
本発明によると、牽引車側においてブレーキペダルによるブレーキ操作が行われていないときに牽引車側加速度センサにて検知された牽引車の加速度とトレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させてトレーラーを制動するので、牽引車側でのエンジンブレーキ時にのみトレーラーのみにその電磁ブレーキで制動力を加えてスネーキング現象を防止でき、牽引車の運転者がブレーキペダルを踏むまでの空走距離を短縮するとともに、牽引車及びトレーラーに既設の制動装置をそのまま利用して、スネーキング現象防止のための所期の制動制御を簡単に実現できる。
【0012】
請求項2及び請求項4に係る発明では、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させるので、スネーキング現象の防止をより確実に行える。
【0013】
請求項5に係る発明によると、牽引車とトレーラーとの加速度差を簡単に検知できる。
【発明を実施するための最良の形態】
【0014】
次に、本発明の実施例を図面に基づいて詳細に説明する。
【実施例】
【0015】
図1及び図2に、牽引車1側の構成とこれに牽引されるトレーラー2側の構成とを併せた、本発明によるスネーキング現象防止システムの全体構成を示す。
牽引車1には、その加速度を検知する牽引車側加速度センサ11及びマイコン(マイクロコンピュータ)12を含むブレーキコントローラ13が搭載されている。ブレーキコントローラ13には、牽引車1のブレーキペダル14の操作によりオン・オフするストップライトスイッチ15が、牽引車1上で接続され、ブレーキコントローラ13は、このストップライトスイッチ15をブレーキペダル操作検知手段として、ブレーキペダル14によるブレーキ操作が行われたか否かを判断する。
【0016】
一方、トレーラー2には、その車輪を制動する電磁ブレーキ21の他に、トレーラー2の加速度を検知するトレーラー側加速度センサ22が搭載され、これらは牽引車1側のブレーキコントローラ13に接続される。
【0017】
マイコン12は、ストップライトスイッチ15からの信号に従い、牽引車側加速度センサ11とトレーラー側加速度センサ22との加速度を比較し、その結果に基づいて電磁ブレーキ21を制御する制御手段であって、CPU、メモリ(ROM及びRAM)、入出力インターフェイスなどを含んで構成されている。
【0018】
電磁ブレーキ21は、電磁石211が、図示しないカムアームを介してブレーキシュー212をブレーキドラム213に押し付け、ブレーキシュー212とブレーキドラム213の摩擦によりトレーラー2の車輪を制動する構成になっている。
【0019】
次に、各構成要素の作用について図2を参照して詳細に説明する。
ストップライトスイッチ15は、牽引車1のブレーキペダル14が作動時にスイッチON、不作動時にスイッチOFFになり、そのON/OFF時間に比例したパルスを発生させてその信号をマイコン12へ伝える。
【0020】
牽引車側加速度センサ11は、牽引車1側の加速度を検知しマイコン12にデータを渡す。
トレーラー側加速度センサ22は、トレーラー2側の加速度を検知しマイコン12にデータを渡す。
マイコン12は、牽引車側加速度センサ11が検知した牽引車1の加速度と、トレーラー側加速度センサ22が検知したトレーラー2の加速度とを、牽引車1のブレーキペダル14がスイッチOFFのときに比較する。
【0021】
ブレーキコントローラ13は、牽引車1のブレーキペダル14がスイッチOFFのときの両加速度センサ11・22の加速度を比較した結果、牽引車1よりもトレーラー2の方がマイナス加速度が上回る場合、そのマイナス加速度に応じたパルス幅変調と呼ばれるパルスを発生させ、電磁ブレーキ21にその信号を送信して電磁ブレーキ21を作動させる。
【0022】
図3は、牽引車及びトレーラーの加速度の推移と、パルス幅変調動作と、パルス幅変調によりコントロールされる電磁ブレーキの動作を表したグラフである。同図のAのグラフは、牽引車及びトレーラーの加速度の推移を示し、縦軸は速さ(V)を、横軸は時間(S)を表す。A1の折れ線は牽引車1の加速度であり、A2の折れ線はトレーラー2の加速度である。折れ線はスピードが増し、加速度が上がると折れ線が右肩上がりとなる。また、エンジンブレーキで加速度が下がると右肩下がりとなる。Bのグラフは、牽引車1とトレーラー2との加速度の差をブレーキコントローラ13がパルス幅変調したものである。Cのグラフは、パルス幅変調により発生したパルスにより作動する電磁ブレーキ21の動作状態である。
【0023】
次に、図3のグラフ及び図4のフローチャートを参照して本実施例の一連の動作について説明する。図4のフローチャートにおけるステップa1〜a5は、図3のグラフ中の時点a1〜a5と対応している。
【0024】
車が勾配や渋滞やカーブなど何かのタイミングで減速すると、まずストップライトスイッチ15によりブレーキペダル14が作動しているかを検知する。ストップライトスイッチ15がONの場合は、マイコン12を介してブレーキコントローラ13により電磁ブレーキ21を作動させる。(ステップa1)。
【0025】
ストップライトスイッチ15がOFFの場合、マイコン12は、牽引車側加速度センサ11が検知した牽引車1の加速度と、トレーラー側加速度センサ22が検知したトレーラー2の加速度との差を計算する。(ステップa2)
牽引車側加速度センサ11の加速度がトレーラー側加速度センサ22の加速度を上回らない場合には、ステップa1へ戻る。(ステップa3)。
【0026】
一方、トレーラー側加速度センサ22が検知したトレーラー2の加速度が牽引車側加速度センサ11が検知した牽引車1の加速を上回る場合、マイコン12を介してブレーキコントローラ13により電磁ブレーキ21を作動させる(ステップa4)。マイコン12は、トレーラー側加速度センサ22の加速度が牽引車側加速度センサ11の加速度を下回るまで上記の動作を繰り返す。(ステップa5)
【図面の簡単な説明】
【0027】
【図1】本発明によるスネーキング現象防止システムの模式図である。
【図2】その構成を示すブロック図である。
【図3】牽引車及びトレーラーの加速度の推移と、パルス幅変調動作と、パルス幅変調によりコントロールされる電磁ブレーキの動作を表したグラフである。
【図4】一連の動作を示すフローチャートである。
【符号の説明】
【0028】
1 牽引車
2 トレーラー
11 牽引車側加速度センサ
12 マイコン
13 ブレーキコントローラ
14 ブレーキペダル
15 ストップライトスイッチ
21 電磁ブレーキ
22 トレーラー側加速度センサ
211 電磁石
212 ブレーキシュー
213 ブレーキドラム
【特許請求の範囲】
【請求項1】
牽引車とこれに牽引されるトレーラーとに、それぞれの加速度を検知する牽引車側加速度センサとトレーラー側加速度センサとをそれぞれ搭載し、牽引車側においてブレーキペダルによるブレーキ操作が行われたか否かを検知し、そのブレーキ操作が行われていないときに前記牽引車側加速度センサにて検知された牽引車の加速度と前記トレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させてトレーラーを制動することを特徴とするトレーラーのスネーキング現象防止方法。
【請求項2】
トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させることを特徴とする請求項1に記載のトレーラーのスネーキング現象防止方法。
【請求項3】
牽引車に搭載されてその加速度を検知する牽引車側加速度センサと、牽引車に牽引されるトレーラーに搭載されてその加速度を検知するトレーラー側加速度センサと、牽引車に搭載されてそのブレーキペダルによるブレーキ操作の有無を検知するブレーキペダル操作検知手段と、このブレーキペダル操作検知手段がブレーキ操作が行われていないことを検知しているときに、前記牽引車側加速度センサにて検知された牽引車の加速度と前記トレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させる制御手段とからなることを特徴とするトレーラーのスネーキング現象防止システム。
【請求項4】
制御手段は、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させることを特徴とする請求項3に記載のトレーラーのスネーキング現象防止システム。
【請求項5】
制御手段は、牽引車側加速度センサからの加速度に応じた出力とトレーラー側加速度センサからの加速度に応じた出力との差を、パルス幅変調して取り出すことを特徴とする請求項4に記載のトレーラーのスネーキング現象防止システム。
【請求項1】
牽引車とこれに牽引されるトレーラーとに、それぞれの加速度を検知する牽引車側加速度センサとトレーラー側加速度センサとをそれぞれ搭載し、牽引車側においてブレーキペダルによるブレーキ操作が行われたか否かを検知し、そのブレーキ操作が行われていないときに前記牽引車側加速度センサにて検知された牽引車の加速度と前記トレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させてトレーラーを制動することを特徴とするトレーラーのスネーキング現象防止方法。
【請求項2】
トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させることを特徴とする請求項1に記載のトレーラーのスネーキング現象防止方法。
【請求項3】
牽引車に搭載されてその加速度を検知する牽引車側加速度センサと、牽引車に牽引されるトレーラーに搭載されてその加速度を検知するトレーラー側加速度センサと、牽引車に搭載されてそのブレーキペダルによるブレーキ操作の有無を検知するブレーキペダル操作検知手段と、このブレーキペダル操作検知手段がブレーキ操作が行われていないことを検知しているときに、前記牽引車側加速度センサにて検知された牽引車の加速度と前記トレーラー側加速度センサにて検知されたトレーラーの加速度とを比較し、後者の加速度が前者の加速度より大きい場合に、トレーラーに搭載されている電磁ブレーキを作動させる制御手段とからなることを特徴とするトレーラーのスネーキング現象防止システム。
【請求項4】
制御手段は、トレーラー側加速度センサにて検知されたトレーラーの加速度が牽引車側加速度センサにて検知された牽引車の加速度より大きくなってから、小さくなるまで、電磁ブレーキを作動させることを特徴とする請求項3に記載のトレーラーのスネーキング現象防止システム。
【請求項5】
制御手段は、牽引車側加速度センサからの加速度に応じた出力とトレーラー側加速度センサからの加速度に応じた出力との差を、パルス幅変調して取り出すことを特徴とする請求項4に記載のトレーラーのスネーキング現象防止システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−83619(P2009−83619A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−254704(P2007−254704)
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000232140)NECフィールディング株式会社 (373)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000232140)NECフィールディング株式会社 (373)
【Fターム(参考)】
[ Back to top ]