
トロイダルコイルの巻線方法
【課題】太い巻線を環状コアに機械的に巻回する巻線方法を実現する。
【解決手段】環状コア46をコアクランプ機構30で固定し、巻線45が略直線状になるように第1固定クランプ3、コアクランプ機構30及び回転クランプ16を縦方向に並べて位置させ、回転クランプ16および第2固定クランプ28は上下方向の移動を行い、コアクランプ機構30と回転クランプ16または第2固定クランプ28が横方向に並んだときに、コアクランプ機構30を横方向に動かし、回転クランプ16または第2固定クランプ28の近くに移動させたり、あるいは遠くに移動させることにより、巻線を環状コアに巻く。
【解決手段】環状コア46をコアクランプ機構30で固定し、巻線45が略直線状になるように第1固定クランプ3、コアクランプ機構30及び回転クランプ16を縦方向に並べて位置させ、回転クランプ16および第2固定クランプ28は上下方向の移動を行い、コアクランプ機構30と回転クランプ16または第2固定クランプ28が横方向に並んだときに、コアクランプ機構30を横方向に動かし、回転クランプ16または第2固定クランプ28の近くに移動させたり、あるいは遠くに移動させることにより、巻線を環状コアに巻く。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は電源回路等に用いるため、太い巻線が巻かれるトロイダルコイルの巻線方法に関するものである。
【背景技術】
【0002】
電源回路等の昇圧や平滑あるいはノイズ除去等に用いられるトロイダルコイルは巻線の径が太い銅線またアルミ線が用いられる。例えば、100A〜200Aの電流が流れるトロイダルコイルでは巻線の外径が0.6mm〜3mm程度の太い巻線が巻かれる。
【0003】
従来のトロイダルコイルは環状コアを固定し、手巻きで巻線を動かして巻いていた。トロイダルコアはケースに入れるため、巻線を環状コアに密着させ巻いて外形を小さくする必要があるが、環状コアの断面が長方形等の四角状になっているため、手巻きでは環状コアに太い巻線を密着させ巻付けることができない。
【0004】
そこで、環状コアに切れ目を入れ、その切れ目を通して機械で銅線を巻付け、巻付けた後に切れ目を閉塞し環状コアを形成することが考えられるが、環状コアに切れ目が入ると磁束が減少し十分な性能を有するトロイダルコイルが実現できない。
【0005】
特開平9−115761号公報に自動的にリング状コアにトロイダルコイルを装着する方法が記載されている。
【0006】
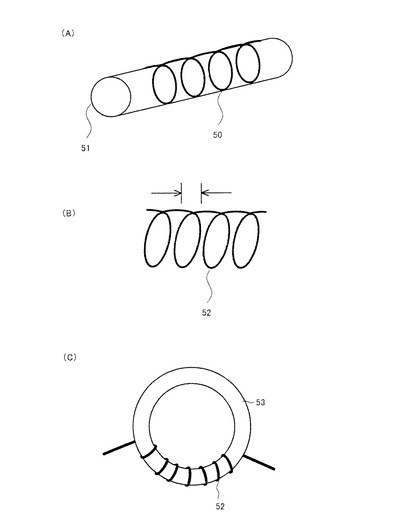
図42(A)に示すように、巻線用の銅線50を芯材51の一方端から他端方向へ芯材51を中心として巻いていく。
【0007】
図42(B)に示すように、巻き終わったなら芯材51を抜き去ると、トロイダルコイル52が出来る。
【0008】
図42(C)に示すように、形成されたトロイダルコイル52の先端をリング状コア53の内側に挿入し、トロイダルコイル52がリング状コア53を巻き込むように、トロイダルコイル52を回転させながらリング状コア53にトロイダルコイル52を巻付ける。
【0009】
また、特開2002−289455号公報にはリング状コアを収納し二つに分割される治具を用いて、リング状コアのまわりに延びる螺旋ガイド溝を設け、螺旋ガイド溝に巻線を押し込んでトロイダルコイルを製造する方法が記載されている。
【特許文献1】特開平9−115761号公報
【特許文献2】特開2002−289455号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
手作業で環状コアに巻線を巻く方法では、手巻きのために巻線の形状が一巻きごとに一定とならない。そのために巻線が環状コアに密着して巻けないのでトロイダルコイルの外形が大きく且つ不統一となり、ケースに収まらなくなる。そこで、機械的に巻く方法が強く要望されている。
【0011】
既にある機械的に巻く方法としては、芯材を用いて予めトロイダルコイルを形成し、そのトロイダルコイルを環状コアに巻付けるので、環状コアに巻線を巻付けるためにトロイダルコイルを回転させなければならない。さらに、巻線を送り込むための装置を必要とし、その装置が完成しても断面が四角状の環状コアに密着して巻線を巻付けることはできない。
【0012】
さらに、トロイダルコイルを巻くために、治具を用いることは巻線の太さ、大きさあるいは環状コアの大きさ等毎に多くの治具を用意する必要性がある。また、太い巻線を用いるトロイダルコイルでは治具に巻線を送り込むことは巻線自体が強度があるので困難で実用性に乏しい。
【0013】
これらの理由で特に、太い巻線のトロイダルコイルは手作業での製造を余儀なくされているのが現状である。
【課題を解決するための手段】
【0014】
本発明は環状コアを移動させることにより自動的に太い巻線を巻回できるようにしたトロイダルコイルの巻線方法を実現するものであり、
巻線の一端を第1固定クランプに固定し、前記巻線を貫通させ、前記巻線の他端を回転クランプで固定し、前記巻線を略直線状になるように前記第1固定クランプ、前記コアクランプ機構及び前記回転クランプを縦方向に並べて位置させ、前記コアクランプ機構を横方向に移動させながら前記回転クランプを略90度回転させて上方向に移動させ、前記環状コアと前記回転クランプ間の前記巻線を横方向に直線状になるまで張ってテンションを加え、前記コアクランプ機構と前記回転クランプを横方向に並べて位置させ、続いて、前記コアクランプ機構を前記回転クランプに近づけるように横方向に移動させ、同時に前記回転クランプを略180度回転をさせて前記巻線の他端を前記環状コアに対向させて貫通させて第2固定クランプで固定し、前記第2固定クランプ、前記コアクランプ機構及び前記回転クランプが横方向に近接して並べて位置し、前記コアクランプ機構を前記第2固定クランプあるいは前記回転クランプから横方向に遠ざけるように移動させて、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構間に前記巻線を横方向に直線状になるまで張ってテンションを加え、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構を横方向に並べて配置し、前記コアクランプ機構を横方向に移動して初期位置に戻し、前記回転クランプを略90度回転させて前記コアクランプ機構の下側の初期位置に移動させて前記巻線を環状コアに巻回させるトロイダルコイル巻線方法を提供する。
【0015】
本発明は前記コアクランプ機構が横方向に直線状に移動し、前記回転クランプは縦方向に直線状に移動し、前記回転クランプの移動する方向に対して前記コアクランプ機構は左右に略対称に移動するトロイダルコイル巻線方法を提供する。
【0016】
本発明は前記コアクランプ機構に前記環状コアの横側面をクランプする横コアクランプを設け、前記横コアクランプを傾斜させることにより前記環状コアを傾斜させ、前記環状コアに巻回された巻線に適度のテンションを加え、前記巻線を前記環状コアに密着させて巻回させるトロイダルコイル巻線方法を提供する。
【0017】
本発明は前記コアクランプ機構の前記横コアクランプは、サーボモータにて傾斜させ、前記サーボモータの電流値を検出し、前記横コアクランプの傾斜を制御して前記巻線に一定のテンションを加えるトロイダルコイル巻線方法を提供する。
【0018】
本発明は前記コアクランプ機構が前記環状コアの縦側面を固定する縦コアクランプと前記環状コアの横外周から固定する横コアクランプを備え、前記縦コアクランプは前記巻線を前記環状コアに巻回した後、前記環状コアを円周方向に回転して前記巻線のピッチ送りしてから前記横コアクランプで固定するトロイダルコイル巻線方法を提供する。
【0019】
本発明は縦コアクランプに巻線が環状コアに巻かれる巻回部を通過させる切れ目を設け、前記切れ目により巻線が環状コアに巻かれる位置を調整するトロイダルコイル巻線方法を提供する。
【発明の効果】
【0020】
本発明のトロイダルコイルの巻線方法はコアクランプ機構を横方向に移動させることにより、環状コアと回転クランプまたは第2固定クランプ間に巻線を直線状になるまで張ってテンションを加えるようにしたので、巻線の環状コアに当たる部分が曲折され、巻線は環状コアに密着して巻かれる。
【0021】
また、巻線を環状コアに巻くためには、コアクランプ機構は横方向に直線状に移動し、回転クランプは縦方向に直線状に移動するのみであるから、コアクランプ機構と回転クランプの動作は単純化され、構造が簡単となる。
【0022】
しかも、回転クランプの移動する方向に対してコアクランプ機構は左右に略対称に移動するので、コアクランプ機構の移動範囲が短くされ、巻く速度が速められる。
【0023】
コアクランプ機構を横方向に移動させながら回転クランプを略90度回転させて上方向に移動させ、環状コアと回転クランプ間の巻線を横方向に直線状になるまで張ってテンションを加えたので、巻線の環状コアに巻かれる巻回部が環状コアの端部に当たり引っ張られ、巻線が環状コアの外周に沿って曲折され、環状コアに密着して巻かれる。
【0024】
コアクランプ機構には環状コアの縦側面を固定する横コアクランプを設け、横コアクランプを傾斜させることにより環状コアを傾斜させ、環状コアに巻回された巻線にテンションを加えたので、巻線を環状コアに密着させて巻回させることができ、トロイダルコイルの外形を小型にされる。
【0025】
本発明はコアクランプ機構の横コアクランプは、サーボモータにて傾斜させ、サーボモータの電流値を検出し、横コアクランプの傾斜を制御したので、巻線に一定のテンションを加えることができる。
【0026】
本発明はコアクランプ機構が環状コアの縦側面を固定する縦コアクランプと環状コアの横外周から固定する横コアクランプを備え、縦コアクランプは巻線を環状コアに巻回した後、環状コアを円周方向に回転して巻線のピッチ送りするので、巻線は環状コアの円周方向に沿って均一に巻かれる。
【0027】
縦コアクランプには巻線の巻回部を通過させる切れ目を設けてあるので、切れ目により巻線が環状コアに巻かれる位置を調整することができる。
【発明を実施するための最良の形態】
【0028】
本発明のトロイダルコイルの巻線方法を図面に従って以下に説明する。
【0029】
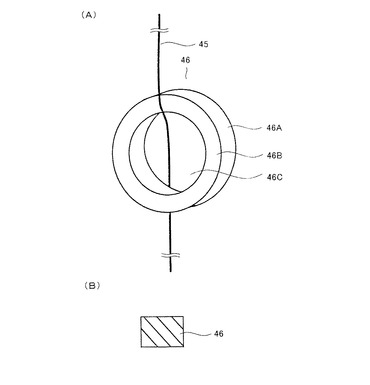
図1(A)は、本発明のトロイダルコイルの巻線方法に用いた環状コアと巻線の斜視図である。
【0030】
巻線45は環状コア46に巻かれる。巻線45は太い銅線またはアルミ線が使用され、具体的には100A〜200A程度の電流が流れるトロイダルコイルに用いる巻線の外径は0.6mm〜3mm程度の太い銅線またはアルミ線が使用される。
【0031】
環状コア46は直径約25mm〜40mmの磁性体で形成されており、図1(B)に示すように、量産効果を高めるためにドーナツ状で、断面が四角形に形成されている。
【0032】
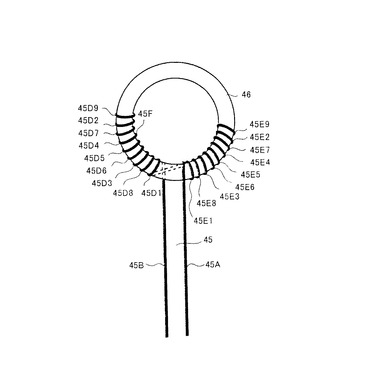
図2は本発明のトロイダルコイルの巻線方法で巻かれたトロイダルコイルの側面図である。巻線45は環状コア46に巻かれる巻回部45D1、45D2・・・45E1、45E2・・・と端部の45A、45Bで構成される。巻線45の一端45Aおよび他端45Bは約200mm以上の長さにしている。一端45Aおよび他端45Bはそのまま端子として使用され、不要な部分は巻線を環状コアに巻回した後に切断される。
【0033】
巻線45は最初に環状コア46の中央部から円周左側方向に1巻線分の間隔を空けて巻回部45D1、45D3・・・45D9まで4〜5回巻く。巻回部45D9まで巻かれたら、前と逆に円周右方向に巻回部45D9と巻回部45D7間に巻回部D8を巻き、巻回部45D7と巻回部45D5間に巻回部D6を巻き、巻回部D2まで巻いて他端45Bを環状コイル56の中央部から取出す。
【0034】
環状コア46の円周左側に巻線が巻かれたら、今度は巻線の巻き方向を逆にして環状コア46の円周右側方向に前述と同様に1巻線分の間隔を空けて巻回部45E1、45E3・・・45E9まで4〜5回巻き、次に円周左方向に巻回部45E9と巻回部45E7間に巻回部E8を巻き、巻回部45E7と巻回部45D5間に巻回部E6を巻き、巻回部45E2まで巻いて一端45Aを環状コイル56の中央部から取出す。
【0035】
次に、本発明のトロイダルコイルの巻線方法を図面に従って説明する。
【0036】
図3〜図16は本発明のトロイダルコイルの巻線方法を示す模型図である
なお、図番号は後述する具体的実施例の説明と分かり易くするために一致させた。
【0037】
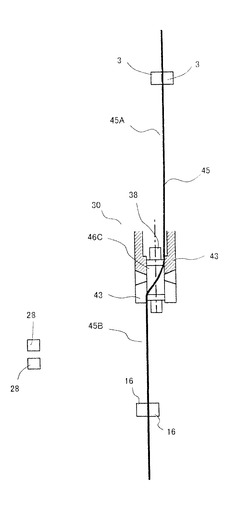
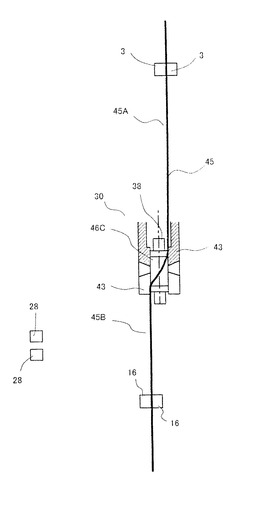
図3に示すように、巻線45の一端45Aを第1固定クランプ機構1の第1クランプ3、3間に挿入し、第1クランプ3、3を閉じて固定する。
【0038】
次に巻線45を他端45Bからコアクランプ機構30の横コアクランプ38、38で固定されている環状コア46の孔46Cに貫通させる。
【0039】
コアクランプ機構30は全体が水平方向に直線移動すると共に、環状コア46を固定している縦コアクランプ43、43により円周方向に回転させ、横コアクランプ38、38により傾斜させる。
【0040】
環状コア46を貫通させた巻線45の他端45Bは回転クランプ機構5に有する回転クランプ16、16間を通過させ、回転クランプ16、16より下方に突出させる。
【0041】
回転クランプ機構5は上下方向に直線移動すると共に、回転クランプ16、16が回転される。
【0042】
尚、以下の図において、図面から第1固定クランプ機構1、第2固定クランプ20および回転クランプ機構5は省略する。
【0043】
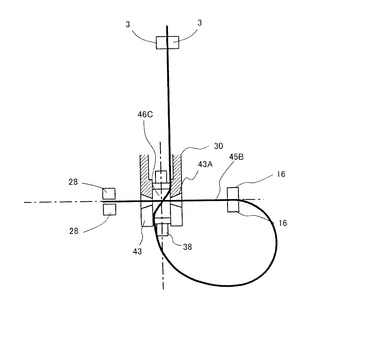
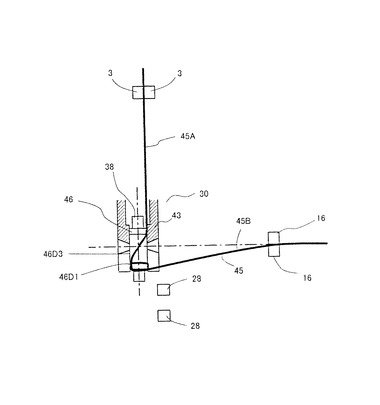
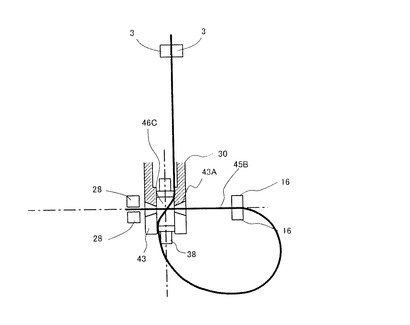
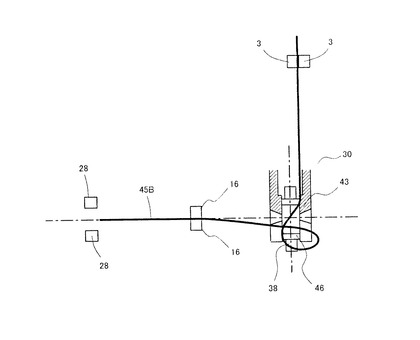
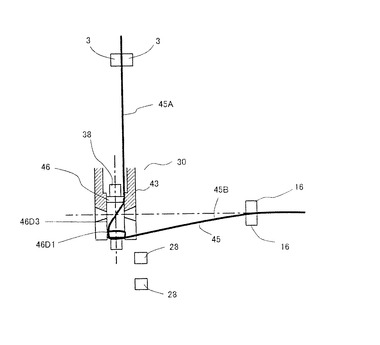
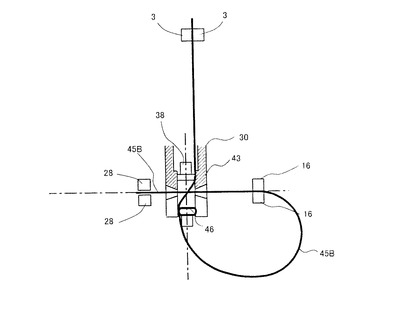
図4に示すように、回転クランプ16、16を閉じ、通過させた巻線45の他端45B側の一部を突出させて固定する。またコアクランプ機構30の縦コアクランプ43、43を閉じて、環状コア46を横コアクランプ38、38と縦コアクランプ43、43で固定し、巻線45を初期状態にセットする。
【0044】
この状態では巻線45が略直線状になるように、第1固定クランプ3、3と横コアクランプ38、38と縦コアクランプ43、43で固定した環状コア46および回転クランプ16、16が縦方向に並べて位置される。
【0045】
巻線45の他端45Bの長さは巻線がループ状に曲げて他方の巻線の他端45Bを環状コイル46に貫通させる際に、巻線に変形を与えない長さにしている。
【0046】
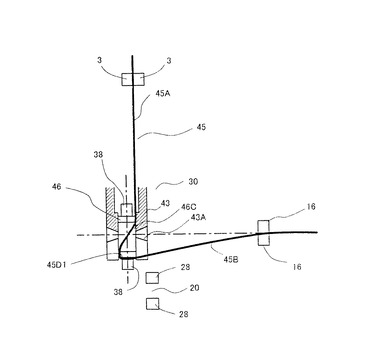
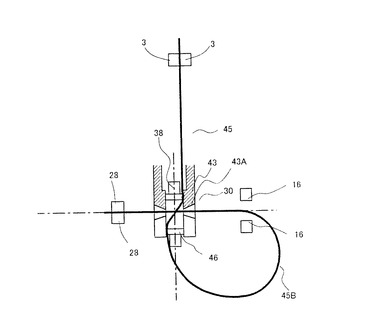
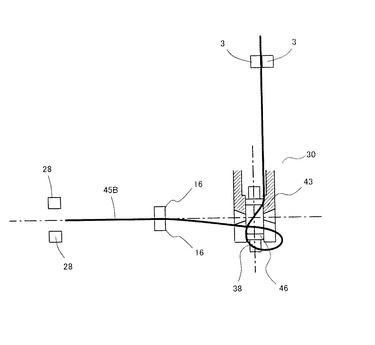
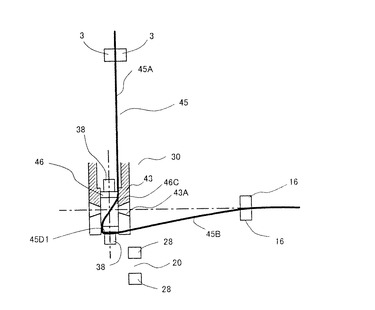
最初に回転クランプ機構5を上方に移動させると共に、回転クランプ16、16を反時計方向に回転させる。これと同時に、コアクランプ機構30は左方向に直線移動される。
【0047】
図5に示すように、回転クランプ機構5にある回転クランプ16、16がコアクランプ機構30に固定されている環状コア46の高さまで上向きに直線移動したときには、回転クランプ16、16は反時計方向に90度回転される。回転クランプ16、16が回転されると、巻線45は環状コア46に端部に当たる巻回部45D1部分から曲折される。
【0048】
このとき、コアクランプ機構30が左方向に直線移動され、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46と回転クランプ16、16は横方向に並び、環状コア46が第2固定クランプ28、28がある位置を通り越した左側位置まで移動すると、巻線45は環状コア46と回転クランプ16、16間に直線状に張られてテンションが加えられるので、巻線45の環状コア46に巻かれる巻回部45D1が環状コア46の端部に当たり、曲折される。
【0049】
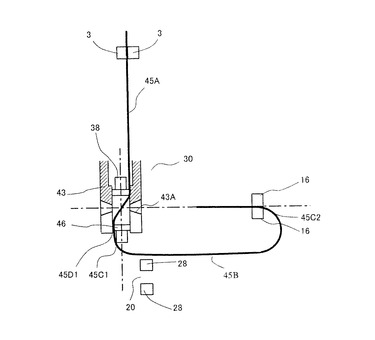
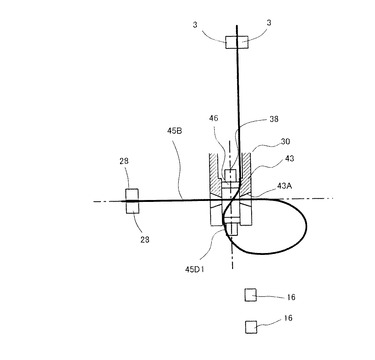
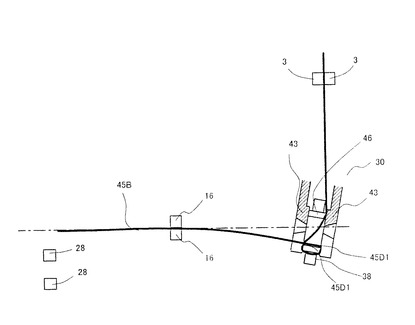
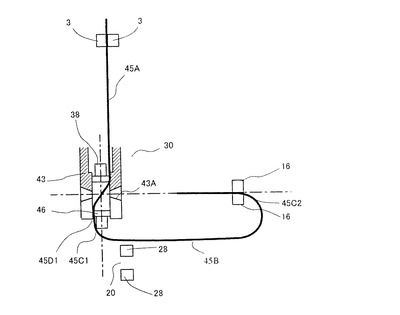
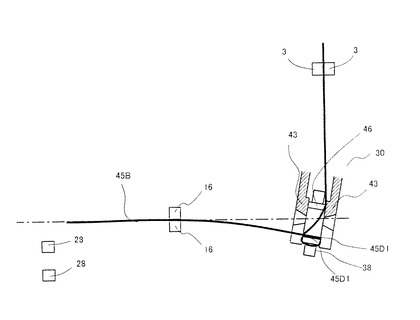
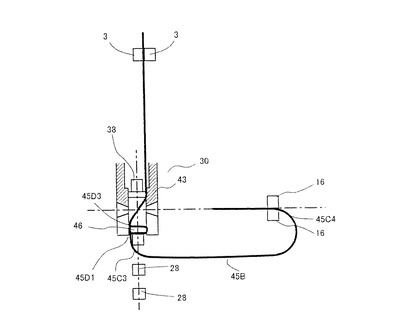
図6に示すように、巻線が直線的に張られた後、コアクランプ機構30が今までと逆に右方向に直線移動され、横コアクランプ38、38と縦コアクランプ43、43の固定されている環状コア46が回転クランプ16、16に接近される。環状コア46が回転クランプ16、16に接近すると共に回転クランプ16、16もさらに反時計方向に回転する。
【0050】
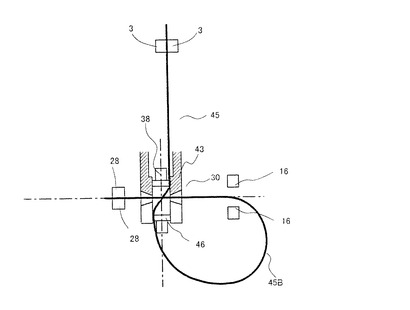
回転クランプ16、16が回転すると、回転クランプ16、16に固定されている巻線45の他端45Bは回転する。このとき、コアクランプ機構30が右方向に直線移動されることにより、環状コア46と回転クランプ16、16間に直線状に張られる巻線45は緩むため、回転された巻線45の他端45Bは環状コア46の端部に当たる付近の中間部分45C1と回転クランプ16、16に固定されている付近の中間部分45C2の離れた二カ所でループ状に曲折され始められる。
【0051】
巻線45の他端45Bの長さは回転クランプ機構5を回転させて、巻線がループ状に曲げても変形にされない長さにされており、巻線45の曲げ始めの中間部分45C1、45C2は離間しているため緩やかに曲げられる。環状コア46が右方向に直線移動され回転クランプ機構5に接近されるに従い、さらに巻線45は大きく湾曲され、全体的に丸くループ状に曲げられる。
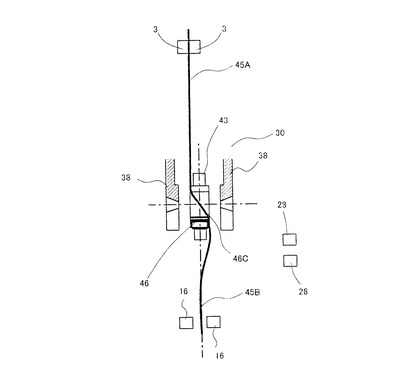
【0052】
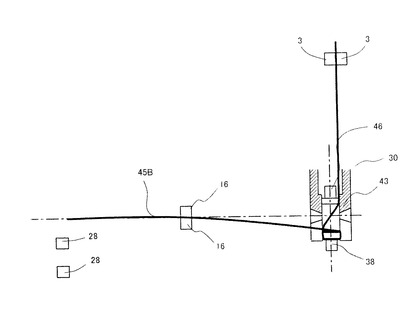
回転クランプ機構5の回転クランプ16、16が反時計方向に180度(最初から270度)回転すると、巻線45の他端45Bは環状コア46の孔46Cに向けられる。このときまだ、環状コア46と回転クランプ16、16の間隔は巻線45の回転クランプ16、16か突出されている他端45Bの長さより長いので、巻線45の他端45Bは環状コア46のコア孔46Cに貫通していない。
【0053】
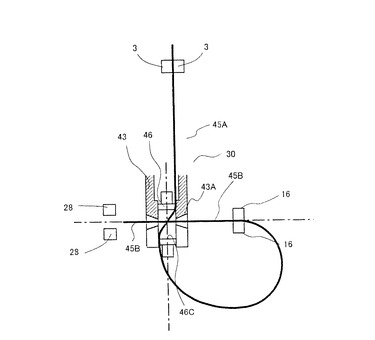
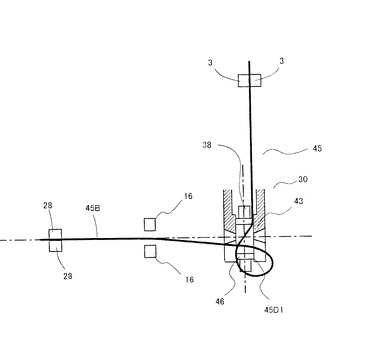
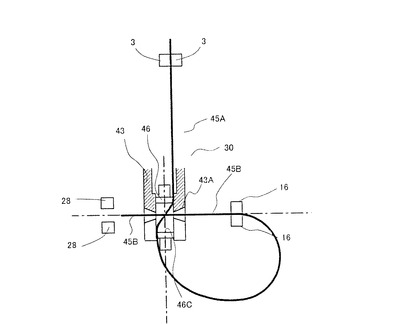
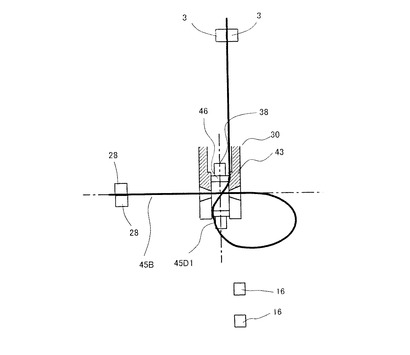
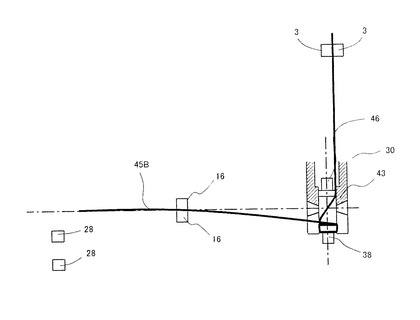
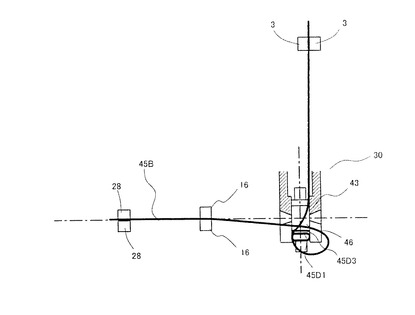
図7に示すように、コアクランプ機構30がさらに右方向に直線移動され、環状コア46が回転クランプ16、16に接近されるので、環状コア46の孔46Cに巻線45の他端45Bが縦コアクランプ43の孔43Aを通過し貫通する。また、第2固定クランプ機構20の上方向の直線移動に伴い、第2クランプ28、28が環状コア46の位置まで上昇する。
【0054】
従って第2固定クランプ28、28と環状コア46および回転クランプ16、16は横方向に並べられる。
【0055】
図8に示すように、第2固定クランプ機構20は右方向に少し直線移動するので、環状コア46に貫通された巻線45の他端45Bが第2固定クランプ機構20の第2固定クランプ28、28にも挿入される。
【0056】
図9に示すように、第2固定クランプ28、28を閉じて挿入された巻線45の他端45Bを固定する。回転クランプ機構5の回転クランプ16、16は開放し固定を解除するので、巻線45の他端45Bは第2固定クランプ28、28が回転クランプ機構5の回転クランプ16、16に代って固定する。
【0057】
図10に示すように、第2固定クランプ機構20の第2固定クランプ28、28で巻線45の他端45Bが固定された後、コアクランプ機構30を引き続き右方向に直線移動する。
【0058】
このとき、環状コア46が移動するのを邪魔しない位置まで回転クランプ16、16を360度回転させながら下降させる。
【0059】
コアクランプ機構30を移動し、横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46は第2固定クランプ28、28から次第に離されるに従い、巻線45の一端45Aは第1固定クランプ機構1の第1クランプ3、3で固定されているので、巻線45の環状コア46の端部に当たっている巻回部45D1が引っ張られ、次第に湾曲が狭められ巻かれる。
【0060】
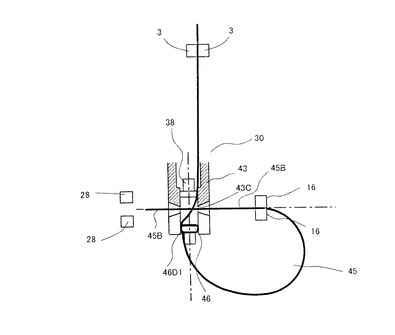
図11に示すように、環状コア46が右側に移動することにより巻回部45D1は環状コア46に巻付けられる。
【0061】
環状コア46に巻線45が巻付かれた後、回転クランプ機構5を上方向に移動させ、巻線45の他方の端部側45Bを回転クランプ機構5の回転クランプ16、16に通過させる。
【0062】
図12に示すように、回転クランプ機構5の回転クランプ16、16を閉じ巻線45の他端45Bを固定する。
【0063】
それまで巻線45の他端45Bを固定していた第2固定クランプ機構20の第2固定クランプ28、28を開放し、巻線45の他端45Bのクランプを解除し、第2固定クランプ28、28を後退させる。
【0064】
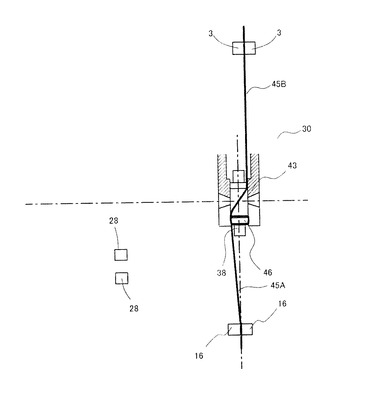
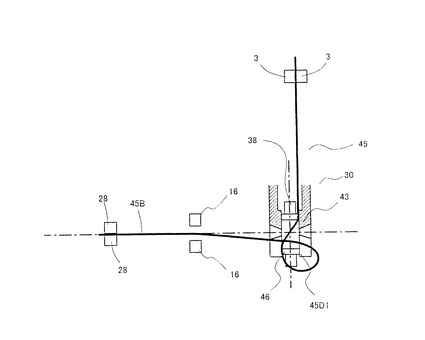
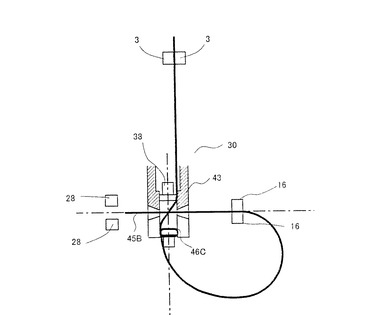
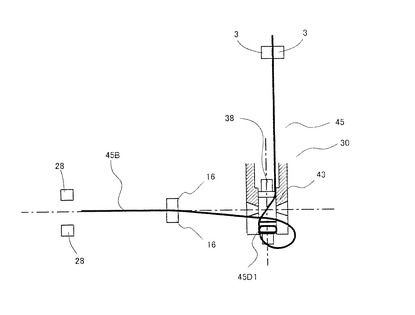
図13に示すように、モータ36を回転させ、支持台39と共に縦コアクランプ43、43を傾け、環状コア46を右方向に傾斜させる。環状コア46を傾斜させながら右方向に移動させると、巻線45の湾曲部分はなくなり、巻線45の巻回部45D1が縦コアクランプ43、43に設けられている切れ目43C(図4(C))を通過し、直線的に張られ、巻線の巻回部45D1を環状コイル46の前述とは反対側の端部に沿って曲折し、環状コア46の所定の円周位置に巻付けられる。
図14に示すように、環状コア46の傾斜を復帰させると、巻線45の環状コア46の端部に接触する巻回部45D1に更にテンションが加わり、巻線45が断面の四角形の環状コア46であっても、環状コア46のコアに沿って曲げられ、巻線45は環状コア46により密着して環状コア46の左側に巻かれることになる。
【0065】
このとき、モータ36に流れる電流値を検出し、環状コア46の傾斜復帰角度を制御し、モータ36に流れる電流値が規定値に達し、巻回部45D1が十分に環状コア46へ密着されたときモータに流れる電流を停止する。なお、密着のされ方がまだ不足のときには、環状コア46を元の状態よりさらに傾斜させる。
【0066】
前述において、第2固定クランプ28、28を巻線45の他方部45Bから解放し、代って回転クランプ16、16で巻線45の他方部45Bを固定してから環状コア46を傾斜させたが、第2固定クランプ28、28で巻線45の他方部54Bを固定しているときに、環状コア46を左方向に傾斜させることにより巻線45の環状コア46の側面と下部外側に接触する巻回部45D1にテンションを加え、巻線45を環状コア46のコアに沿って曲げ、環状コア46に密着して中央部付近から環状コア46の左側に巻かれるようにしてもよい。
図15に示すように、巻線45の他端45Bを固定した回転クランプ機構5を降下させる。このとき回転クランプ機構5の回転クランプ16、16は90度回転させながら降下させ初期状態に復帰させる。
【0067】
この状態では再び巻線45が略直線状になるように、第1固定クランプ3、3と横コアクランプ38、38と縦コアクランプ43、43で固定した環状コア46および回転クランプ16、16が縦方向に並べて位置される。
【0068】
前述と同様にして2回目の巻線を開始する。
【0069】
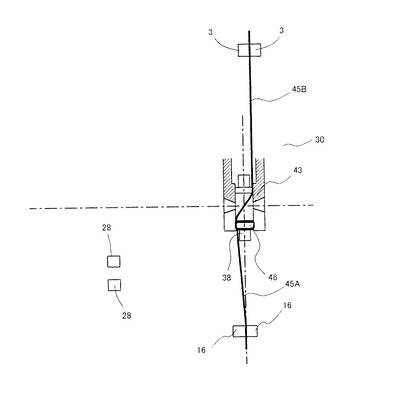
図16に示すように、再び回転クランプ機構5の回転クランプ16、16をコアクランプ機構30の高さまで上方向に移動すると共に、回転クランプ16、16を反時計方向に90度回転させる。
【0070】
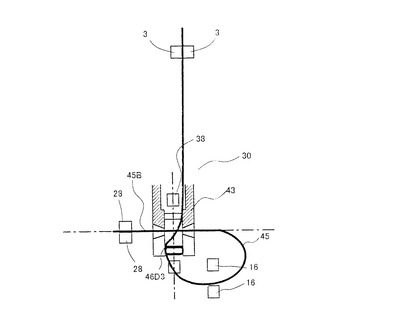
コアクランプ機構30が左方向に直線移動され、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46と回転クランプ16、16は横方向に並び、環状コア46が第2固定クランプ28、28がある位置を通り越した左側位置まで移動すると、巻線45は環状コア46と回転クランプ16、16間に直線状に張られ、巻線45の環状コア46に巻かれる巻回部45D1が環状コア46の端部に当たり、曲折される。
【0071】
このとき、コアクランプ機構30の縦コアクランプ43、43により環状コア46は2巻線分左円周方向に回転しているので、環状コア46の巻回部46D1より2巻線分移動した位置に巻回部46D3が圧着される。従って第2固定クランプ28、28と環状コア46および回転クランプ16、16は横方向に並べられる。
【0072】
その後は前述と同様にして巻回部46D3が巻かれる。
【0073】
係る動作を繰返し、巻線45は環状コア46の中央部から円周左側方向に間隔を置いて巻回部45D1、45D3・・・45D9まで巻かれたら、次に円周右方向に巻回部45D9と巻回部45D7間に巻回部D8を巻き、巻回部45D7と巻回部45D5間に巻回部D6を巻き、巻回部D2まで巻いて他端45Bを環状コイル56の中央部から取出す。
【0074】
環状コア46の円周左側に巻線が巻かれたら、今度は巻線の巻き方向を逆にして円周右側方向に間隔を置いて巻回部45E1、45E3・・・を巻く。
【0075】
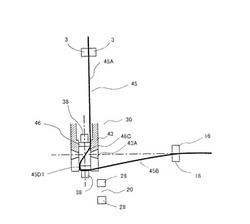
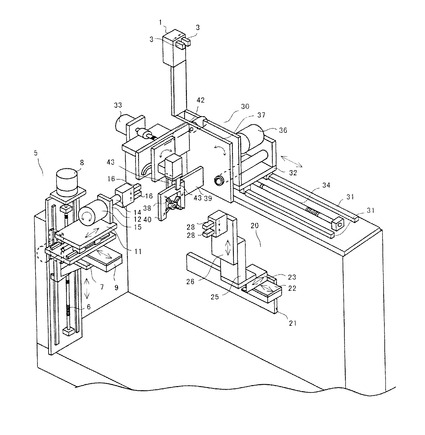
図17は本発明のトロイダルコイルの巻線方法に用いられるトロイダルコイルの巻線装置の斜視図である。
【0076】
第1固定クランプ機構1は左右に開閉する第1固定クランプ3、3を備える。
【0077】
回転クランプ機構5は螺溝が切られた軸6に螺溝が螺合する第1の支持台7を有する。支持台7には左右方向に直線移動する第2の支持台9が設けられており、第2の支持台9には前後方向に直線移動する第3の支持台11が設けられている。
【0078】
軸6はモータ8にて回転され第1の支持台7を上下方向に直線移動させる。第3の支持台11の切起し片12には軸14を介して細長の回転クランプ16、16が取付けられている。回転クランプ16、16は左右に開閉し、軸14はサーボモータ15にて回転される。
【0079】
第2固定クランプ機構20はレール21を左右に水平移動する第1の支持台22と、第1の支持台22に前後方向に移動する第2の支持台23と、支持台23の部材25に上下方向に直線移動する第3の支持台26と、第3の支持台26に設けられた固定クランプ28、28を有する。
【0080】
コアクランプ機構30はレール31、31に第1の支持台32が設けられている。第1の支持台32はモータにて回転される軸34の螺溝に螺合される螺溝(図示せず)が設けられ、レール31、31に沿って左右方向に直線移動される。第1の支持台32にはモータ36にて回転される第2の支持台37が設けられ、第2の支持台37に環状コア46を
側面から固定する4つの横コアクランプ38、38が支持材39、支持材40を介して取付けられている。横コアクランプ38、38は支持材40から内方に突出したり、引っ込んだりする。横コアクランプ38、38はモータ36にて回転され、環状コア46を傾斜させる。
【0081】
第2の支持台37には支持材42を介して環状コア46の縦面から固定する縦コアクランプ43、43が取付けられている。縦コアクランプ43、43はモータ33にて支持材42が回転することにより回転し、環状コア46を円周方向に回転させる。
【0082】
第1固定クランプ機構1はコアクランプ機構30の左右方向の直線移動と共に直線移動される。
【0083】
図17において、第2の固定クランプ機構20はコアクランプ機構30より右方向に位置されているが、巻線を環状コアに巻回する箇所によって、第2固定クランプ機構20はレール21に沿って移動しコアクランプ機構30より左方向に位置される。
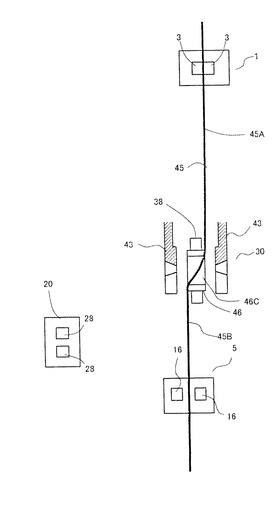
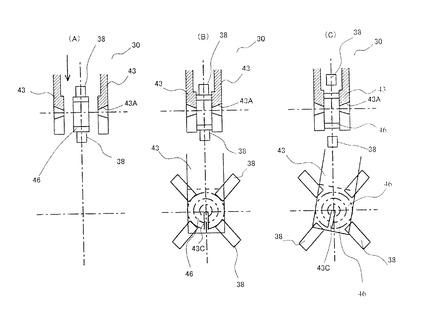
図18は本発明のトロイダルコイルの巻線方法に用いられるコアクランプ機構に用いられる横コアクランプおよび縦コアクランプの関係を示す断面図で、図18(A)はコアクランプ機構30の横コアクランプ38、38で環状コア46を固定している状態を示し、図18(B)は横コアクランプ38、38と縦コアクランプ43、43の双方で環状コア46を固定している状態を示し、図18(C)は横コアクランプ38、38を開放し、縦コアクランプ43、43で環状コア46を固定し、環状コア46を円周方向に回転している状態を示している。
【0084】
縦コアクランプ43、43には巻線45が湾曲され環状コア46に巻かれる巻回部45D1、45D2、・・・45E1、45E2が通過される切れ目43Cが設けられている。切れ目43Cにより巻回部45D1、45D2、・・・45E1、45E2が巻かれる環状コア46の円周位置が定められる。
【0085】
なお、図18において縦コアクランプ43、43の上側のハッチング部分は側面部に相当し、下側のハッチングがない部分は切れ目43C部に相当する。
図19から図41はこの巻線装置を用いた本発明のトロイダルコイルの巻線方法を示す具体的な実施例の模型図である。
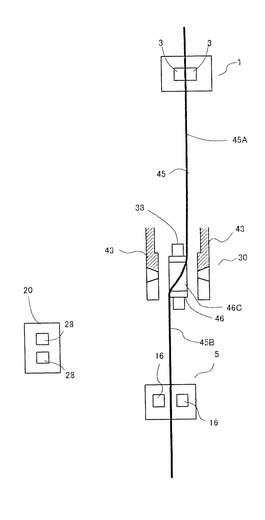
【0086】
図19に示すように、巻線45を巻回させる以前の初期状態では、第1固定クランプ機構1の第1固定クランプ3、3は図面の略上部中央に位置される。また第2固定クランプ機構20の第2固定クランプ28、28は巻き始める前はコアクランプ機構30に対して図面の左下方に位置され、コアクランプ機構30が直線方向に移動するのを妨害しないようにしている。
(1)巻線45を初期状態にセットする。
【0087】
図18(A)に示すように、横コアクランプ38、38を内方方向に移動し、横コアクランプ38、38で環状コア46の外側横側面46Aの4箇所を固定する。このとき縦コアクランプ43、43はまだ開放されたままである。
【0088】
図19に示すように、巻線45の一端45Aを第1固定クランプ機構1の第1固定クランプ3、3間に挿入し、第1固定クランプ3、3を閉じて固定する。一端45Aが固定された巻線45をコアクランプ機構30の横コアクランプ38、38で固定されている環状コア46の孔46Cにそのとき開放されている側面から貫通させる。環状コア46を貫通させた巻線45の他端45Bは回転クランプ機構5の回転クランプ16を通過させ、回転クランプ16、16より下方に突出させる。
【0089】
この状態では巻線45が略直線状になるように、第1固定クランプ3、3と横コアクランプ38、38と縦コアクランプ43、43で固定した環状コア46および回転クランプ16、16が縦方向に並べて位置される。
【0090】
図18(B)に示すように、環状コア46に他端45Bを貫通させた後の状態では環状コア46は横コアクランプ38、38と縦コアクランプ43、43の双方で固定されている。
(2)巻線の左側巻回部の曲折の形成
回転クランプ機構5のモータ8を回転させると、軸6が回転し、その軸6の螺溝に螺合する第1の支持台7は上方方向に直線移動する。このときサーボモータ15も回転し回転クランプ16、16は軸14を中心として反時計方向に回転する。同時にコアクランプ機構30はモータが回転することにより、軸34に螺合する第1の支持台32は左方向に直線移動する。
【0091】
図21に示すように、回転クランプ機構5の回転クランプ16、16がコアクランプ機構30に固定されている環状コア46の高さまで直線移動しながら、モータ15が回転し回転クランプ16、16は反時計方向に90度回転される。回転クランプ16、16が回転されると、巻線45の他端45Bは回転され、環状コア46の端部に当たる部分45D1から巻線45は曲げられる。
【0092】
このとき、モータ33が回転し、コアクランプ機構30が左方向に直線移動され、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46と回転クランプ16、16は横方向に並び、環状コア46が第2固定クランプ28、28がある位置を通り越した左側位置まで移動すると、巻線45は環状コア46と回転クランプ16、16間に直線状に張られてテンションが加えられるので、巻線45の環状コア46に巻かれる巻回部45D1が環状コア46の端部に当たり、曲折される。
【0093】
(3)巻線の他端の反転
図22に示すように、次にモータがそれまでとは逆回転させると、コアクランプ機構30は今までと逆に右方向に直線移動されるので、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ機構43、43に固定されている環状コア46も右方向に直線移動され、環状コア46は回転クランプ16、16に接近してくる。
【0094】
環状コア46が回転クランプ16、16に接近すると共に、モータ15をさらに回転することにより、回転クランプ16、16もさらに反時計方向に回転する。回転クランプ16、16が回転すると、回転クランプ16、16に固定されている巻線45の他端45Bは回転する。このときコアクランプ機構30は右方向に直線移動されるので、横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46も直線移動する。それにより環状コア46と回転クランプ16、16間に直線状に張られていた巻線45が緩むため、巻線45は環状コア46に当たる付近の中間部分45C1と回転クランプ16、16に固定されている付近の中間部分45C2の離れている二カ所でループ状に曲げ始められる。
【0095】
回転クランプ16、16が反時計方向に180度(最初から270度)回転すると、巻線45の他端45Bは反転して環状コア46の孔46Cに向けられる。このときまだ環状コア46と回転クランプ16、16の間隔は巻線45の回転クランプ16、16から突出されている他端45Bの長さより長いので、巻線45の他端45Bは環状コア46のコア孔46Cに貫通していない。
【0096】
最初に曲げられる巻線45の中間部分45C1、45C2は離間しているので緩やかに曲げられる。環状コア46が右方向に直線移動され回転クランプ17に接近されに従い、さらに巻線45は大きく湾曲され、全体的に丸くループ状に曲げられる。
(4)巻線の他端の固定
図23に示すように、モータ33をさらに回転させると、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46はさらに右方向に直線移動され回転クランプ16に接近されるので、環状コア46の孔46Cに巻線45の他端45Bが縦コアクランプ43の孔43Aを通過し貫通する。このとき第2固定クランプ機構20を上方へ直線移動させ、第2固定クランプ28、28を横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46のコア孔46Cと対向する位置し、第2固定クランプ28、28と環状コア46および回転クランプ16、16は横方向に並べられる。
【0097】
コアクランプ機構30をさらに右方向に直線移動し、環状コア46を回転クランプ16に接近させる。環状コア46を回転クランプ16、16に接近させると、巻線45の他端45Bはさらに環状コア46のコア孔46Cに貫通される。
【0098】
(5)巻線の右側巻回部の曲折の形成
図24に示すように、第2固定クランプ28、28はレール21に沿ってエアシンダーによりそれまで環状コア46が位置していた所まで直線移動させると、環状コア46に貫通された巻線45の他端45Bが第2固定クランプ機構20の第2固定クランプ28、28にも挿入される。
【0099】
図25に示すように、第2固定クランプ機構20の第2固定クランプ28、28を閉じて挿入された巻線45の他端45Bを固定する。回転クランプ機構5の回転クランプ16、16は開放しクランプを解除するので、今度は巻線45の他端45Bは固定クランプ20の第2固定クランプ28、28が回転クランプ16、16に代って固定する。
【0100】
図25に示すように、第3の支持台11を後退させることにより回転クランプ16、16を後退させ、回転クランプ16を巻線45の後方へ移動する。そしてモータ8を逆転させて、コアクランプ機構30が移動するのを邪魔しない位置まで回転クランプ16、16を時計方向に360度回転させながら下降させる。
【0101】
第2固定クランプ機構27の第2固定クランプ28、28で巻線45の他端45Bが固定された後、コアクランプ機構30を引き続き右方向に直線移動する。
【0102】
コアクランプ機構の支持台37を右方向に直線移動すると横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46は第2固定クランプ28、28から次第に離されるに従い、巻線45の一端45Aは第1クランプ3で固定されているので、巻線45の環状コア46に当たっている巻回部45D1が引っ張られ、次第に湾曲が狭められ巻かれる。
【0103】
図26に示すように、コアクランプ機構30が回転クランプ16、16を通り越して、右方向に直線移動させると、巻線45の湾曲部分は少なくなり、巻線45の巻回部45D1が縦コアクランプ機構43、43に設けられている切れ目43C(図4(C))を通過し、巻線の巻回部45D1を環状コイル46に巻付ける。
【0104】
図27に示すように、環状コア46に巻線45が巻かれた後、モータ8を回転させ、回転クランプ機構5を上方向に移動させさらに支持台11を前進させて、巻線45の他方の端部側45Bを回転クランプ機構5の回転クランプ16、16に通過させる。
【0105】
図28に示すように、回転クランプ機構5の回転クランプ16、16を閉じ巻線45の他端45Bを固定する。
【0106】
それまで巻線45の他端45Bを固定していた第2固定クランプ機構20の第2固定クランプ28、28を開放し、巻線45の他端45Bのクランプを解除し、第2固定クランプ28、28を後退させる。
(6)巻線の巻回部にテンション印加
図29に示すように、モータ36を回転させ、支持台39と共に縦コアクランプ43、43を傾け、環状コア46を右方向に傾斜させる。環状コア46を傾斜させながら右方向に移動させると、巻線45の湾曲部分はなくなり、巻線45の巻回部45D1が縦コアクランプ43、43に設けられている切れ目43C(図4(C))を通過し、直線的に張られ、巻線の巻回部45D1を環状コイル46の前述とは反対側の端部に沿って曲折し、環状コア46の所定の円周位置に巻付けられる。
【0107】
図30に示すように、環状コア46の傾斜を復帰させると、巻線45の環状コア46の端部に接触する巻回部45D1に更にテンションが加わり、巻線45が断面の四角形の環状コア46であっても、環状コア46のコアに沿って曲げられ、巻線45は環状コア46により密着して環状コア46の左側に巻かれることになる。
【0108】
このとき、モータ36に流れる電流値を検出し、環状コア46の傾斜復帰角度を制御し、モータ36に流れる電流値が規定値に達し、巻回部45D1が十分に環状コア46へ密着されたときモータに流れる電流を停止する。なお、密着のされ方がまだ不足のときには、環状コア46を元の状態よりさらに右に傾斜させる。
【0109】
図30に示すように、前述において、第2固定クランプ28、28を巻線45の他方部45Bから解放し、代って回転クランプ16、16で巻線45の他方部45Bを固定してから環状コア46を傾斜させたが、第2固定クランプ28、28で巻線45の他方部54Bを固定しているときに、環状コア46を左方向に傾斜させ、巻線45の環状コア46の端部に接触する巻回部45D1にテンションを加え、巻線45を環状コア46のコアに沿って曲げ、環状コア46に密着して中央部付近から環状コア46の左側に巻かれるようにしてもよい。
【0110】
(7)巻線を初期状態に復帰
図31に示すように、巻線45が環状コア46に巻かれた後、環状コア46を復帰させると共に、第2固定クランプ28、28を下方の直線移動し、元の位置に復帰させる。
【0111】
巻線45の他端45Bを固定した回転クランプ機構5を降下させる。このとき回転クランプ機構5の回転クランプ16、16は90度回転させながら降下させ、初期状態に復帰させる。
(8)二回目の巻線の開始
図31に示す状態で、前述と同様にモータ8を回転し第1の支持台7を上方向に移動させると共に、モータ15を回転し軸14を回転させる。
【0112】
(9)巻線の二回目の左側巻回部の曲折の形成。
【0113】
図32に示すように、再び回転クランプ機構5の回転クランプ16、16がコアクランプ機構30の高さまで上方向に移動すると共に、モータ15が回転し回転クランプ16、16の細長の回転クランプ16、16は反時計方向に90度回転される。またコアクランプ機構30は第2固定クランプ機構20がある位置を通り越して左方向に水平移動しているので、環状コア46に巻線45が当たる。このときコアクランプ機構30に固定されている環状コア46と回転クランプ16、16は横方向に直線状になるまで張って巻回部46D3にテンションを加える。
図33に示すように、モータ36をそれまでと逆回転させると、コアクランプ機構30は逆に右方向に直線移動され、横コアクランプ38、38,と横コアクランプ38、38に固定されている環状コア46も右方向に移動する。それと共に回転クランプ16、16の回転クランプ16、16はさらに反時計方向に回転する。回転クランプ16、16が回転されると、環状コア46と回転クランプ16、16間にある巻線45は曲げられる。
【0114】
図34に示すように、環状コア46の右方向への直線移動と共に、移動モータ15もさらに回転することにより、回転クランプ16、16もさらに反時計方向に回転し、巻線45の他端45Bをさらに回転する。回転クランプ16、16が反時計方向に180度(最初から270度)回転すると、巻線45の他端45Bは環状コア46の孔46Cに向けられる。
【0115】
図35に示すように、モータ36をさらに回転させると、コアクランプ機構30は右方向に直線移動し、横コアクランプ38、38,と横コアクランプ38、38に固定されている環状コア46は回転クランプ16、16に接近されるので、環状コア46の孔46Cに巻線45の他端45Bが縦コアクランプ43の孔43Aを通過し貫通する。このとき第2固定クランプ機構20も移動され、第2固定クランプ28、28が横コアクランプ38、38と縦コアクランプ機構43、43に固定されている環状コア46の孔46Cと同一高さに位置する。
(10)二回目の巻線の環状コアへの位置決め
図4(C)に示すように、このとき横コアクランプ38、38は開放され、環状コア46は縦コアクランプ43、43だけで固定される。そして縦コアクランプ43、43がモータ33にて反時計方向に回転され、環状コア46を2巻線分円周方向に回転させる。環状コア46を回転させた後、横コアクランプ38、38で環状コア46を固定し、縦コアクランプ43、43を元の位置に復帰させる。縦コアクランプ43、43を元の位置に復帰されたら、再び、横コアクランプ38、38と縦コアクランプ43、43で環状コア46を固定する。
【0116】
巻線45の巻回部45D3は環状コア46が回転されているので、縦コアクランプ43、43に有する切れ目46Cを通して前に巻かれた巻回部45D1より2巻線分円周方向にずれた環状コア46の部分に当たり、その位置に巻回される。
【0117】
図36に示すように、コアクランプ機構30をさらに右方向に直線移動し、固定クランプ27も右方向に移動させると、環状コア46の孔46Cを貫通した巻線45の他端45Bが第2固定クランプ機構20の第2固定クランプ28、28に挿入される。
【0118】
図37に示すように、第2の固定クランプ機構20の第2固定クランプ28、28を閉じ挿入された巻線45の他端45Bを回転クランプ16、16に代って固定する。回転クランプ機構5の回転クランプ16、16を開放しクランプを解除し、回転クランプ16、16を後退させてから360度回転させて下降させる。
【0119】
図38に示すように、コアクランプ機構30を引き続き右方向に直線移動すると、横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46は固定クランプ28、28から離間する方向に直線移動し、巻線45の他端45Bは固定クランプ機構20の第2固定クランプ28、28で固定されているので、巻線45の環状コア46の端部に当たっている巻回部45D3が引っ張られ次第に巻かれる。
【0120】
環状コア46に巻線45が巻かれた後、モータ8を回転させ、回転クランプ機構5を上方向に移動させ、巻線45の他方の端部側45Bを回転クランプ機構5の回転クランプ16、16に通過させる。
【0121】
図39に示すように、回転クランプ機構5の回転クランプ16、16を閉じ巻線45の他端45Bを固定する。それまで巻線45の他端45Bを固定していた第2固定クランプ機構20の第2固定クランプ28、28を開放し、巻線45の他端45Bのクランプを解除し、第2固定クランプ28、28を後退させる。
【0122】
図40に示すように、巻線45の他端45Bは回転クランプ16、16で固定される。係る状態でモータ36を回転させ、支持台39と共に縦コアクランプ43、43を傾け、環状コア46を右方向に傾斜させる。環状コア46を傾斜させながら右方向に移動させると、巻線45の湾曲部分はなくなり、巻線45の巻回部45D1が縦コアクランプ43、43に設けられている切れ目43C(図4(C))を通過し、直線的に張られ、巻線の巻回部45D1を環状コイル46の前述とは反対側の端部に沿って曲折し、環状コア46の所定の円周位置に巻付けられる。
・ 図41に示すように、環状コア46の傾斜を復帰させると、巻線45の環状コア46の端部に接触する巻回部45D1に更にテンションが加わり、巻線45が断面の四角形の環状コア46であっても、環状コア46のコアに沿って曲げられ、巻線45は環状コア46により密着して環状コア46の左側に巻かれることになる。
【0123】
このとき、モータ36に流れる電流値を検出し、環状コア46の傾斜復帰角度を制御し、モータ36に流れる電流値が規定値に達し、巻回部45D1が十分に環状コア46へ密着されたときモータに流れる電流を停止する。なお、密着のされ方がまだ不足のときには、環状コア46を元の状態よりさらに傾斜させる。
【0124】
前述において、第2固定クランプ28、28を巻線45の他方部45Bから解放し、代って回転クランプ16、16で巻線45の他方部45Bを固定してから環状コア46を傾斜させたが、第2固定クランプ28、28で巻線45の他端45Bを固定しているときに、環状コア46を左方向に傾斜させることにより巻線45の環状コア46の端部に当たる巻回部45D1にテンションを加え、巻線45を環状コア46のコアに沿って曲げ、環状コア46に密着して中央部付近から環状コア46の左側に巻かれるようにしてもよい。
図41に示すように、巻線45が環状コア46に巻かれた後、環状コア46を復帰させると共に、回転クランプ16、16を下方の直線移動し、元の位置に復帰させる。巻線45の他端45Bを固定した回転クランプ機構5を降下させるが、このとき回転クランプ機構5の回転クランプ16、16は90度回転させながら降下させ、最初の状態に復帰させる。
(11)巻線を複数回
図2に示すように、係る動作を繰返し巻線45が環状コア46に巻かれるごとに環状コア46を横コアクランプ38、38にて反時計方向に回転させ、巻回部45D3、45D5、45D7,45D9まで環状コア46の円周左方向に巻回する。巻回部45D9まで巻かれたとき、横コアクランプ38、38を逆転し環状コア46を反時計方向に回転させる。
【0125】
今度は以前に巻かれた巻回部45D9と巻回部45D7間の環状コア46に巻回部45D2が巻かれる。
【0126】
係る動作を繰返し、巻回部45D7と巻回部45D5間に巻回部45D4、巻回部45D5と巻回部45D3間に巻回部45D6と巻回し、巻回部45D3と巻回部45D1間に巻回部45D8まで巻かれたとき、巻線45の他端45Bを最初に環状コア46に巻かれた巻回部45D1付近より取出し端子とする。
【0127】
図2に示す環状コア46の円周左側部分が巻かれた後、環状コア46の右側部分に巻線45の一端45A側を巻回する。
【図面の簡単な説明】
【0128】
【図1】本発明のトロイダルコイルの巻線方法に用いられた環状コアで、図1(A)は斜面図であり、図1(B)は断面図である。
【図2】本発明のトロイダルコイルの巻線方法に用い巻線を環状コアに巻回させた状態を示す側面図である。
【図3】本発明のトロイダルコイルの巻線方法の巻線をセットする前を示す模型図である。
【図4】本発明のトロイダルコイルの巻線方法の巻線をセットした状態を示す模型図である。
【図5】本発明のトロイダルコイルの巻線方法の巻線の他方の端部を上方向に移動させた状態を示す模型図である。
【図6】本発明のトロイダルコイルの巻線方法の他方の端部を上方向に移動させて環状コアを貫通させる前の状態を示す模型図である。
【図7】本発明のトロイダルコイルの巻線方法の他方の端部を環状コアを貫通させた状態を示す模型図である。
【図8】本発明のトロイダルコイルの巻線方法の他方の端部を固定クランプに貫通させた状態を示す模型図である。
【図9】本発明のトロイダルコイルの巻線方法の他方の端部を固定クランプに固定させた状態を示す模型図である。
【図10】本発明のトロイダルコイルの巻線方法の環状コアを元の方向に移動させ、巻線を環状コアに巻回させる状態を示す模型図である。
【図11】本発明のトロイダルコイルの巻線方法の巻線を環状コアに巻回させた状態を示す模型図である。
【図12】同じく本発明のトロイダルコイルの巻線方法の巻線を環状コアに巻回させた状態を示す模型図である。
【図13】本発明のトロイダルコイルの巻線方法の巻線を環状コアを傾斜させた状態を示す模型図である。
【図14】同じく本発明のトロイダルコイルの巻線方法の巻線を環状コアの傾斜を復帰させた状態を示す模型図である。
【図15】本発明のトロイダルコイルの巻線方法で2回目に巻線が巻かれる最初の状態を示す模型図である。
【図16】本発明のトロイダルコイルの巻線方法で巻線が2回目に巻かれる状態を示す模型図である。
【図17】本発明のトロイダルコイルの巻線方法に用いられた巻線装置の斜視図である。
【図18】本発明のトロイダルコイルの巻線方法に用いられたコアクランプ機構の横コアクランプおよび縦コアクランプと環状コアの関係を示す断面図で、図18(A)はクランプ前の状態を示し、図18(B)は固定した状態を示し、図18(C)は固定した状態で横コアクランプおよび縦コアクランプを傾斜させた状態を示す。
【図19】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線をセットする前を示す模型図である。
【図20】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線をセットした状態を示す模型図である。
【図21】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を浮上させて環状コアを貫通させる前の状態を示す模型図である。
【図22】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を浮上させて環状コアに貫通させた状態を示す模型図である。
【図23】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を浮上させて環状コアと第2の固定コアを貫通させた状態を示す模型図である。
【図24】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を固定コアにクランプさせた状態を示す模型図である。
【図25】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線の中央を環状コアに巻回させた状態を示す模型図である。
【図26】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアに巻回させた状態を示す模型図である。
【図27】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアに巻回させた状態を示す模型図である。
【図28】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアに巻回させた状態を示す模型図である。
【図29】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアを傾斜させた状態を示す模型図である。
【図30】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアの傾斜を復帰させた状態を示す模型図である。
【図31】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の巻線をセットした状態を示す模型図である。
【図32】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の巻線の他方の端部を浮上させた状態を示す模型図である。
【図33】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の他方の端部を浮上させて環状コアを貫通させる前の状態を示す模型図である。
【図34】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の他方の端部を浮上させて環状コアと第2の固定コアを貫通させた状態を示す模型図である。
【図35】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の他方の端部を第2の固定コアにクランプさせた状態を示す模型図である。
【図36】本発明のトロイダルコイルの巻線方法の2回目のコアクランプ機構の横コアクランプおよび縦コアクランプを元の方向に移動させ、巻線の中央を環状コアに巻回させる状態を示す模型図である。
【図37】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目のコアクランプ機構の横コアクランプおよび縦コアクランプと環状コアを元の方向に移動させ、同じく巻線の中央を環状コアに巻回させる状態を示す模型図である。
【図38】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の巻線を環状コアに巻回させた状態を示す模型図である。
【図39】本発明のトロイダルコイルの巻線方法の2回目のコアクランプ機構の横コアクランプおよび縦コアクランプを元の方向に移動させ、巻線の中央を環状コアに巻回させる状態を示す模型図である。
【図40】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目のコアクランプ機構の横コアクランプおよび縦コアクランプと環状コアを巻回させる状態を示す模型図である。
【図41】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で初期状態に復帰させた状態を示す模型図である。
【図42】従来のトロイダルコイルの巻線方法で、図42(A)は芯材に巻線を巻く方法を示す斜視図で、図42(B)はトロイダルコイル状の巻かれた巻線の斜視図で、図42(C)は従来方法で巻かれたトロイダルコイルの斜視図である。
【符号の説明】
【0129】
1 第1固定クランプ機構
3 第1固定クランプ
5 回転クランプ機構
6 軸
16 回転クランプ
20 第2固定クランプ機構
28 第2固定クランプ
30 コアクランプ機構
38 横コアクランプ
43 縦コアクランプ
45 巻線
45A 一方の端部
45B 他方の端部
46 環状コア
【技術分野】
【0001】
本発明は電源回路等に用いるため、太い巻線が巻かれるトロイダルコイルの巻線方法に関するものである。
【背景技術】
【0002】
電源回路等の昇圧や平滑あるいはノイズ除去等に用いられるトロイダルコイルは巻線の径が太い銅線またアルミ線が用いられる。例えば、100A〜200Aの電流が流れるトロイダルコイルでは巻線の外径が0.6mm〜3mm程度の太い巻線が巻かれる。
【0003】
従来のトロイダルコイルは環状コアを固定し、手巻きで巻線を動かして巻いていた。トロイダルコアはケースに入れるため、巻線を環状コアに密着させ巻いて外形を小さくする必要があるが、環状コアの断面が長方形等の四角状になっているため、手巻きでは環状コアに太い巻線を密着させ巻付けることができない。
【0004】
そこで、環状コアに切れ目を入れ、その切れ目を通して機械で銅線を巻付け、巻付けた後に切れ目を閉塞し環状コアを形成することが考えられるが、環状コアに切れ目が入ると磁束が減少し十分な性能を有するトロイダルコイルが実現できない。
【0005】
特開平9−115761号公報に自動的にリング状コアにトロイダルコイルを装着する方法が記載されている。
【0006】
図42(A)に示すように、巻線用の銅線50を芯材51の一方端から他端方向へ芯材51を中心として巻いていく。
【0007】
図42(B)に示すように、巻き終わったなら芯材51を抜き去ると、トロイダルコイル52が出来る。
【0008】
図42(C)に示すように、形成されたトロイダルコイル52の先端をリング状コア53の内側に挿入し、トロイダルコイル52がリング状コア53を巻き込むように、トロイダルコイル52を回転させながらリング状コア53にトロイダルコイル52を巻付ける。
【0009】
また、特開2002−289455号公報にはリング状コアを収納し二つに分割される治具を用いて、リング状コアのまわりに延びる螺旋ガイド溝を設け、螺旋ガイド溝に巻線を押し込んでトロイダルコイルを製造する方法が記載されている。
【特許文献1】特開平9−115761号公報
【特許文献2】特開2002−289455号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
手作業で環状コアに巻線を巻く方法では、手巻きのために巻線の形状が一巻きごとに一定とならない。そのために巻線が環状コアに密着して巻けないのでトロイダルコイルの外形が大きく且つ不統一となり、ケースに収まらなくなる。そこで、機械的に巻く方法が強く要望されている。
【0011】
既にある機械的に巻く方法としては、芯材を用いて予めトロイダルコイルを形成し、そのトロイダルコイルを環状コアに巻付けるので、環状コアに巻線を巻付けるためにトロイダルコイルを回転させなければならない。さらに、巻線を送り込むための装置を必要とし、その装置が完成しても断面が四角状の環状コアに密着して巻線を巻付けることはできない。
【0012】
さらに、トロイダルコイルを巻くために、治具を用いることは巻線の太さ、大きさあるいは環状コアの大きさ等毎に多くの治具を用意する必要性がある。また、太い巻線を用いるトロイダルコイルでは治具に巻線を送り込むことは巻線自体が強度があるので困難で実用性に乏しい。
【0013】
これらの理由で特に、太い巻線のトロイダルコイルは手作業での製造を余儀なくされているのが現状である。
【課題を解決するための手段】
【0014】
本発明は環状コアを移動させることにより自動的に太い巻線を巻回できるようにしたトロイダルコイルの巻線方法を実現するものであり、
巻線の一端を第1固定クランプに固定し、前記巻線を貫通させ、前記巻線の他端を回転クランプで固定し、前記巻線を略直線状になるように前記第1固定クランプ、前記コアクランプ機構及び前記回転クランプを縦方向に並べて位置させ、前記コアクランプ機構を横方向に移動させながら前記回転クランプを略90度回転させて上方向に移動させ、前記環状コアと前記回転クランプ間の前記巻線を横方向に直線状になるまで張ってテンションを加え、前記コアクランプ機構と前記回転クランプを横方向に並べて位置させ、続いて、前記コアクランプ機構を前記回転クランプに近づけるように横方向に移動させ、同時に前記回転クランプを略180度回転をさせて前記巻線の他端を前記環状コアに対向させて貫通させて第2固定クランプで固定し、前記第2固定クランプ、前記コアクランプ機構及び前記回転クランプが横方向に近接して並べて位置し、前記コアクランプ機構を前記第2固定クランプあるいは前記回転クランプから横方向に遠ざけるように移動させて、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構間に前記巻線を横方向に直線状になるまで張ってテンションを加え、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構を横方向に並べて配置し、前記コアクランプ機構を横方向に移動して初期位置に戻し、前記回転クランプを略90度回転させて前記コアクランプ機構の下側の初期位置に移動させて前記巻線を環状コアに巻回させるトロイダルコイル巻線方法を提供する。
【0015】
本発明は前記コアクランプ機構が横方向に直線状に移動し、前記回転クランプは縦方向に直線状に移動し、前記回転クランプの移動する方向に対して前記コアクランプ機構は左右に略対称に移動するトロイダルコイル巻線方法を提供する。
【0016】
本発明は前記コアクランプ機構に前記環状コアの横側面をクランプする横コアクランプを設け、前記横コアクランプを傾斜させることにより前記環状コアを傾斜させ、前記環状コアに巻回された巻線に適度のテンションを加え、前記巻線を前記環状コアに密着させて巻回させるトロイダルコイル巻線方法を提供する。
【0017】
本発明は前記コアクランプ機構の前記横コアクランプは、サーボモータにて傾斜させ、前記サーボモータの電流値を検出し、前記横コアクランプの傾斜を制御して前記巻線に一定のテンションを加えるトロイダルコイル巻線方法を提供する。
【0018】
本発明は前記コアクランプ機構が前記環状コアの縦側面を固定する縦コアクランプと前記環状コアの横外周から固定する横コアクランプを備え、前記縦コアクランプは前記巻線を前記環状コアに巻回した後、前記環状コアを円周方向に回転して前記巻線のピッチ送りしてから前記横コアクランプで固定するトロイダルコイル巻線方法を提供する。
【0019】
本発明は縦コアクランプに巻線が環状コアに巻かれる巻回部を通過させる切れ目を設け、前記切れ目により巻線が環状コアに巻かれる位置を調整するトロイダルコイル巻線方法を提供する。
【発明の効果】
【0020】
本発明のトロイダルコイルの巻線方法はコアクランプ機構を横方向に移動させることにより、環状コアと回転クランプまたは第2固定クランプ間に巻線を直線状になるまで張ってテンションを加えるようにしたので、巻線の環状コアに当たる部分が曲折され、巻線は環状コアに密着して巻かれる。
【0021】
また、巻線を環状コアに巻くためには、コアクランプ機構は横方向に直線状に移動し、回転クランプは縦方向に直線状に移動するのみであるから、コアクランプ機構と回転クランプの動作は単純化され、構造が簡単となる。
【0022】
しかも、回転クランプの移動する方向に対してコアクランプ機構は左右に略対称に移動するので、コアクランプ機構の移動範囲が短くされ、巻く速度が速められる。
【0023】
コアクランプ機構を横方向に移動させながら回転クランプを略90度回転させて上方向に移動させ、環状コアと回転クランプ間の巻線を横方向に直線状になるまで張ってテンションを加えたので、巻線の環状コアに巻かれる巻回部が環状コアの端部に当たり引っ張られ、巻線が環状コアの外周に沿って曲折され、環状コアに密着して巻かれる。
【0024】
コアクランプ機構には環状コアの縦側面を固定する横コアクランプを設け、横コアクランプを傾斜させることにより環状コアを傾斜させ、環状コアに巻回された巻線にテンションを加えたので、巻線を環状コアに密着させて巻回させることができ、トロイダルコイルの外形を小型にされる。
【0025】
本発明はコアクランプ機構の横コアクランプは、サーボモータにて傾斜させ、サーボモータの電流値を検出し、横コアクランプの傾斜を制御したので、巻線に一定のテンションを加えることができる。
【0026】
本発明はコアクランプ機構が環状コアの縦側面を固定する縦コアクランプと環状コアの横外周から固定する横コアクランプを備え、縦コアクランプは巻線を環状コアに巻回した後、環状コアを円周方向に回転して巻線のピッチ送りするので、巻線は環状コアの円周方向に沿って均一に巻かれる。
【0027】
縦コアクランプには巻線の巻回部を通過させる切れ目を設けてあるので、切れ目により巻線が環状コアに巻かれる位置を調整することができる。
【発明を実施するための最良の形態】
【0028】
本発明のトロイダルコイルの巻線方法を図面に従って以下に説明する。
【0029】
図1(A)は、本発明のトロイダルコイルの巻線方法に用いた環状コアと巻線の斜視図である。
【0030】
巻線45は環状コア46に巻かれる。巻線45は太い銅線またはアルミ線が使用され、具体的には100A〜200A程度の電流が流れるトロイダルコイルに用いる巻線の外径は0.6mm〜3mm程度の太い銅線またはアルミ線が使用される。
【0031】
環状コア46は直径約25mm〜40mmの磁性体で形成されており、図1(B)に示すように、量産効果を高めるためにドーナツ状で、断面が四角形に形成されている。
【0032】
図2は本発明のトロイダルコイルの巻線方法で巻かれたトロイダルコイルの側面図である。巻線45は環状コア46に巻かれる巻回部45D1、45D2・・・45E1、45E2・・・と端部の45A、45Bで構成される。巻線45の一端45Aおよび他端45Bは約200mm以上の長さにしている。一端45Aおよび他端45Bはそのまま端子として使用され、不要な部分は巻線を環状コアに巻回した後に切断される。
【0033】
巻線45は最初に環状コア46の中央部から円周左側方向に1巻線分の間隔を空けて巻回部45D1、45D3・・・45D9まで4〜5回巻く。巻回部45D9まで巻かれたら、前と逆に円周右方向に巻回部45D9と巻回部45D7間に巻回部D8を巻き、巻回部45D7と巻回部45D5間に巻回部D6を巻き、巻回部D2まで巻いて他端45Bを環状コイル56の中央部から取出す。
【0034】
環状コア46の円周左側に巻線が巻かれたら、今度は巻線の巻き方向を逆にして環状コア46の円周右側方向に前述と同様に1巻線分の間隔を空けて巻回部45E1、45E3・・・45E9まで4〜5回巻き、次に円周左方向に巻回部45E9と巻回部45E7間に巻回部E8を巻き、巻回部45E7と巻回部45D5間に巻回部E6を巻き、巻回部45E2まで巻いて一端45Aを環状コイル56の中央部から取出す。
【0035】
次に、本発明のトロイダルコイルの巻線方法を図面に従って説明する。
【0036】
図3〜図16は本発明のトロイダルコイルの巻線方法を示す模型図である
なお、図番号は後述する具体的実施例の説明と分かり易くするために一致させた。
【0037】
図3に示すように、巻線45の一端45Aを第1固定クランプ機構1の第1クランプ3、3間に挿入し、第1クランプ3、3を閉じて固定する。
【0038】
次に巻線45を他端45Bからコアクランプ機構30の横コアクランプ38、38で固定されている環状コア46の孔46Cに貫通させる。
【0039】
コアクランプ機構30は全体が水平方向に直線移動すると共に、環状コア46を固定している縦コアクランプ43、43により円周方向に回転させ、横コアクランプ38、38により傾斜させる。
【0040】
環状コア46を貫通させた巻線45の他端45Bは回転クランプ機構5に有する回転クランプ16、16間を通過させ、回転クランプ16、16より下方に突出させる。
【0041】
回転クランプ機構5は上下方向に直線移動すると共に、回転クランプ16、16が回転される。
【0042】
尚、以下の図において、図面から第1固定クランプ機構1、第2固定クランプ20および回転クランプ機構5は省略する。
【0043】
図4に示すように、回転クランプ16、16を閉じ、通過させた巻線45の他端45B側の一部を突出させて固定する。またコアクランプ機構30の縦コアクランプ43、43を閉じて、環状コア46を横コアクランプ38、38と縦コアクランプ43、43で固定し、巻線45を初期状態にセットする。
【0044】
この状態では巻線45が略直線状になるように、第1固定クランプ3、3と横コアクランプ38、38と縦コアクランプ43、43で固定した環状コア46および回転クランプ16、16が縦方向に並べて位置される。
【0045】
巻線45の他端45Bの長さは巻線がループ状に曲げて他方の巻線の他端45Bを環状コイル46に貫通させる際に、巻線に変形を与えない長さにしている。
【0046】
最初に回転クランプ機構5を上方に移動させると共に、回転クランプ16、16を反時計方向に回転させる。これと同時に、コアクランプ機構30は左方向に直線移動される。
【0047】
図5に示すように、回転クランプ機構5にある回転クランプ16、16がコアクランプ機構30に固定されている環状コア46の高さまで上向きに直線移動したときには、回転クランプ16、16は反時計方向に90度回転される。回転クランプ16、16が回転されると、巻線45は環状コア46に端部に当たる巻回部45D1部分から曲折される。
【0048】
このとき、コアクランプ機構30が左方向に直線移動され、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46と回転クランプ16、16は横方向に並び、環状コア46が第2固定クランプ28、28がある位置を通り越した左側位置まで移動すると、巻線45は環状コア46と回転クランプ16、16間に直線状に張られてテンションが加えられるので、巻線45の環状コア46に巻かれる巻回部45D1が環状コア46の端部に当たり、曲折される。
【0049】
図6に示すように、巻線が直線的に張られた後、コアクランプ機構30が今までと逆に右方向に直線移動され、横コアクランプ38、38と縦コアクランプ43、43の固定されている環状コア46が回転クランプ16、16に接近される。環状コア46が回転クランプ16、16に接近すると共に回転クランプ16、16もさらに反時計方向に回転する。
【0050】
回転クランプ16、16が回転すると、回転クランプ16、16に固定されている巻線45の他端45Bは回転する。このとき、コアクランプ機構30が右方向に直線移動されることにより、環状コア46と回転クランプ16、16間に直線状に張られる巻線45は緩むため、回転された巻線45の他端45Bは環状コア46の端部に当たる付近の中間部分45C1と回転クランプ16、16に固定されている付近の中間部分45C2の離れた二カ所でループ状に曲折され始められる。
【0051】
巻線45の他端45Bの長さは回転クランプ機構5を回転させて、巻線がループ状に曲げても変形にされない長さにされており、巻線45の曲げ始めの中間部分45C1、45C2は離間しているため緩やかに曲げられる。環状コア46が右方向に直線移動され回転クランプ機構5に接近されるに従い、さらに巻線45は大きく湾曲され、全体的に丸くループ状に曲げられる。
【0052】
回転クランプ機構5の回転クランプ16、16が反時計方向に180度(最初から270度)回転すると、巻線45の他端45Bは環状コア46の孔46Cに向けられる。このときまだ、環状コア46と回転クランプ16、16の間隔は巻線45の回転クランプ16、16か突出されている他端45Bの長さより長いので、巻線45の他端45Bは環状コア46のコア孔46Cに貫通していない。
【0053】
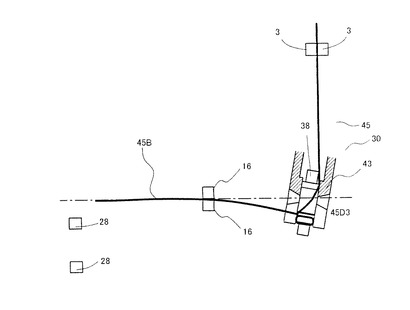
図7に示すように、コアクランプ機構30がさらに右方向に直線移動され、環状コア46が回転クランプ16、16に接近されるので、環状コア46の孔46Cに巻線45の他端45Bが縦コアクランプ43の孔43Aを通過し貫通する。また、第2固定クランプ機構20の上方向の直線移動に伴い、第2クランプ28、28が環状コア46の位置まで上昇する。
【0054】
従って第2固定クランプ28、28と環状コア46および回転クランプ16、16は横方向に並べられる。
【0055】
図8に示すように、第2固定クランプ機構20は右方向に少し直線移動するので、環状コア46に貫通された巻線45の他端45Bが第2固定クランプ機構20の第2固定クランプ28、28にも挿入される。
【0056】
図9に示すように、第2固定クランプ28、28を閉じて挿入された巻線45の他端45Bを固定する。回転クランプ機構5の回転クランプ16、16は開放し固定を解除するので、巻線45の他端45Bは第2固定クランプ28、28が回転クランプ機構5の回転クランプ16、16に代って固定する。
【0057】
図10に示すように、第2固定クランプ機構20の第2固定クランプ28、28で巻線45の他端45Bが固定された後、コアクランプ機構30を引き続き右方向に直線移動する。
【0058】
このとき、環状コア46が移動するのを邪魔しない位置まで回転クランプ16、16を360度回転させながら下降させる。
【0059】
コアクランプ機構30を移動し、横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46は第2固定クランプ28、28から次第に離されるに従い、巻線45の一端45Aは第1固定クランプ機構1の第1クランプ3、3で固定されているので、巻線45の環状コア46の端部に当たっている巻回部45D1が引っ張られ、次第に湾曲が狭められ巻かれる。
【0060】
図11に示すように、環状コア46が右側に移動することにより巻回部45D1は環状コア46に巻付けられる。
【0061】
環状コア46に巻線45が巻付かれた後、回転クランプ機構5を上方向に移動させ、巻線45の他方の端部側45Bを回転クランプ機構5の回転クランプ16、16に通過させる。
【0062】
図12に示すように、回転クランプ機構5の回転クランプ16、16を閉じ巻線45の他端45Bを固定する。
【0063】
それまで巻線45の他端45Bを固定していた第2固定クランプ機構20の第2固定クランプ28、28を開放し、巻線45の他端45Bのクランプを解除し、第2固定クランプ28、28を後退させる。
【0064】
図13に示すように、モータ36を回転させ、支持台39と共に縦コアクランプ43、43を傾け、環状コア46を右方向に傾斜させる。環状コア46を傾斜させながら右方向に移動させると、巻線45の湾曲部分はなくなり、巻線45の巻回部45D1が縦コアクランプ43、43に設けられている切れ目43C(図4(C))を通過し、直線的に張られ、巻線の巻回部45D1を環状コイル46の前述とは反対側の端部に沿って曲折し、環状コア46の所定の円周位置に巻付けられる。
図14に示すように、環状コア46の傾斜を復帰させると、巻線45の環状コア46の端部に接触する巻回部45D1に更にテンションが加わり、巻線45が断面の四角形の環状コア46であっても、環状コア46のコアに沿って曲げられ、巻線45は環状コア46により密着して環状コア46の左側に巻かれることになる。
【0065】
このとき、モータ36に流れる電流値を検出し、環状コア46の傾斜復帰角度を制御し、モータ36に流れる電流値が規定値に達し、巻回部45D1が十分に環状コア46へ密着されたときモータに流れる電流を停止する。なお、密着のされ方がまだ不足のときには、環状コア46を元の状態よりさらに傾斜させる。
【0066】
前述において、第2固定クランプ28、28を巻線45の他方部45Bから解放し、代って回転クランプ16、16で巻線45の他方部45Bを固定してから環状コア46を傾斜させたが、第2固定クランプ28、28で巻線45の他方部54Bを固定しているときに、環状コア46を左方向に傾斜させることにより巻線45の環状コア46の側面と下部外側に接触する巻回部45D1にテンションを加え、巻線45を環状コア46のコアに沿って曲げ、環状コア46に密着して中央部付近から環状コア46の左側に巻かれるようにしてもよい。
図15に示すように、巻線45の他端45Bを固定した回転クランプ機構5を降下させる。このとき回転クランプ機構5の回転クランプ16、16は90度回転させながら降下させ初期状態に復帰させる。
【0067】
この状態では再び巻線45が略直線状になるように、第1固定クランプ3、3と横コアクランプ38、38と縦コアクランプ43、43で固定した環状コア46および回転クランプ16、16が縦方向に並べて位置される。
【0068】
前述と同様にして2回目の巻線を開始する。
【0069】
図16に示すように、再び回転クランプ機構5の回転クランプ16、16をコアクランプ機構30の高さまで上方向に移動すると共に、回転クランプ16、16を反時計方向に90度回転させる。
【0070】
コアクランプ機構30が左方向に直線移動され、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46と回転クランプ16、16は横方向に並び、環状コア46が第2固定クランプ28、28がある位置を通り越した左側位置まで移動すると、巻線45は環状コア46と回転クランプ16、16間に直線状に張られ、巻線45の環状コア46に巻かれる巻回部45D1が環状コア46の端部に当たり、曲折される。
【0071】
このとき、コアクランプ機構30の縦コアクランプ43、43により環状コア46は2巻線分左円周方向に回転しているので、環状コア46の巻回部46D1より2巻線分移動した位置に巻回部46D3が圧着される。従って第2固定クランプ28、28と環状コア46および回転クランプ16、16は横方向に並べられる。
【0072】
その後は前述と同様にして巻回部46D3が巻かれる。
【0073】
係る動作を繰返し、巻線45は環状コア46の中央部から円周左側方向に間隔を置いて巻回部45D1、45D3・・・45D9まで巻かれたら、次に円周右方向に巻回部45D9と巻回部45D7間に巻回部D8を巻き、巻回部45D7と巻回部45D5間に巻回部D6を巻き、巻回部D2まで巻いて他端45Bを環状コイル56の中央部から取出す。
【0074】
環状コア46の円周左側に巻線が巻かれたら、今度は巻線の巻き方向を逆にして円周右側方向に間隔を置いて巻回部45E1、45E3・・・を巻く。
【0075】
図17は本発明のトロイダルコイルの巻線方法に用いられるトロイダルコイルの巻線装置の斜視図である。
【0076】
第1固定クランプ機構1は左右に開閉する第1固定クランプ3、3を備える。
【0077】
回転クランプ機構5は螺溝が切られた軸6に螺溝が螺合する第1の支持台7を有する。支持台7には左右方向に直線移動する第2の支持台9が設けられており、第2の支持台9には前後方向に直線移動する第3の支持台11が設けられている。
【0078】
軸6はモータ8にて回転され第1の支持台7を上下方向に直線移動させる。第3の支持台11の切起し片12には軸14を介して細長の回転クランプ16、16が取付けられている。回転クランプ16、16は左右に開閉し、軸14はサーボモータ15にて回転される。
【0079】
第2固定クランプ機構20はレール21を左右に水平移動する第1の支持台22と、第1の支持台22に前後方向に移動する第2の支持台23と、支持台23の部材25に上下方向に直線移動する第3の支持台26と、第3の支持台26に設けられた固定クランプ28、28を有する。
【0080】
コアクランプ機構30はレール31、31に第1の支持台32が設けられている。第1の支持台32はモータにて回転される軸34の螺溝に螺合される螺溝(図示せず)が設けられ、レール31、31に沿って左右方向に直線移動される。第1の支持台32にはモータ36にて回転される第2の支持台37が設けられ、第2の支持台37に環状コア46を
側面から固定する4つの横コアクランプ38、38が支持材39、支持材40を介して取付けられている。横コアクランプ38、38は支持材40から内方に突出したり、引っ込んだりする。横コアクランプ38、38はモータ36にて回転され、環状コア46を傾斜させる。
【0081】
第2の支持台37には支持材42を介して環状コア46の縦面から固定する縦コアクランプ43、43が取付けられている。縦コアクランプ43、43はモータ33にて支持材42が回転することにより回転し、環状コア46を円周方向に回転させる。
【0082】
第1固定クランプ機構1はコアクランプ機構30の左右方向の直線移動と共に直線移動される。
【0083】
図17において、第2の固定クランプ機構20はコアクランプ機構30より右方向に位置されているが、巻線を環状コアに巻回する箇所によって、第2固定クランプ機構20はレール21に沿って移動しコアクランプ機構30より左方向に位置される。
図18は本発明のトロイダルコイルの巻線方法に用いられるコアクランプ機構に用いられる横コアクランプおよび縦コアクランプの関係を示す断面図で、図18(A)はコアクランプ機構30の横コアクランプ38、38で環状コア46を固定している状態を示し、図18(B)は横コアクランプ38、38と縦コアクランプ43、43の双方で環状コア46を固定している状態を示し、図18(C)は横コアクランプ38、38を開放し、縦コアクランプ43、43で環状コア46を固定し、環状コア46を円周方向に回転している状態を示している。
【0084】
縦コアクランプ43、43には巻線45が湾曲され環状コア46に巻かれる巻回部45D1、45D2、・・・45E1、45E2が通過される切れ目43Cが設けられている。切れ目43Cにより巻回部45D1、45D2、・・・45E1、45E2が巻かれる環状コア46の円周位置が定められる。
【0085】
なお、図18において縦コアクランプ43、43の上側のハッチング部分は側面部に相当し、下側のハッチングがない部分は切れ目43C部に相当する。
図19から図41はこの巻線装置を用いた本発明のトロイダルコイルの巻線方法を示す具体的な実施例の模型図である。
【0086】
図19に示すように、巻線45を巻回させる以前の初期状態では、第1固定クランプ機構1の第1固定クランプ3、3は図面の略上部中央に位置される。また第2固定クランプ機構20の第2固定クランプ28、28は巻き始める前はコアクランプ機構30に対して図面の左下方に位置され、コアクランプ機構30が直線方向に移動するのを妨害しないようにしている。
(1)巻線45を初期状態にセットする。
【0087】
図18(A)に示すように、横コアクランプ38、38を内方方向に移動し、横コアクランプ38、38で環状コア46の外側横側面46Aの4箇所を固定する。このとき縦コアクランプ43、43はまだ開放されたままである。
【0088】
図19に示すように、巻線45の一端45Aを第1固定クランプ機構1の第1固定クランプ3、3間に挿入し、第1固定クランプ3、3を閉じて固定する。一端45Aが固定された巻線45をコアクランプ機構30の横コアクランプ38、38で固定されている環状コア46の孔46Cにそのとき開放されている側面から貫通させる。環状コア46を貫通させた巻線45の他端45Bは回転クランプ機構5の回転クランプ16を通過させ、回転クランプ16、16より下方に突出させる。
【0089】
この状態では巻線45が略直線状になるように、第1固定クランプ3、3と横コアクランプ38、38と縦コアクランプ43、43で固定した環状コア46および回転クランプ16、16が縦方向に並べて位置される。
【0090】
図18(B)に示すように、環状コア46に他端45Bを貫通させた後の状態では環状コア46は横コアクランプ38、38と縦コアクランプ43、43の双方で固定されている。
(2)巻線の左側巻回部の曲折の形成
回転クランプ機構5のモータ8を回転させると、軸6が回転し、その軸6の螺溝に螺合する第1の支持台7は上方方向に直線移動する。このときサーボモータ15も回転し回転クランプ16、16は軸14を中心として反時計方向に回転する。同時にコアクランプ機構30はモータが回転することにより、軸34に螺合する第1の支持台32は左方向に直線移動する。
【0091】
図21に示すように、回転クランプ機構5の回転クランプ16、16がコアクランプ機構30に固定されている環状コア46の高さまで直線移動しながら、モータ15が回転し回転クランプ16、16は反時計方向に90度回転される。回転クランプ16、16が回転されると、巻線45の他端45Bは回転され、環状コア46の端部に当たる部分45D1から巻線45は曲げられる。
【0092】
このとき、モータ33が回転し、コアクランプ機構30が左方向に直線移動され、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46と回転クランプ16、16は横方向に並び、環状コア46が第2固定クランプ28、28がある位置を通り越した左側位置まで移動すると、巻線45は環状コア46と回転クランプ16、16間に直線状に張られてテンションが加えられるので、巻線45の環状コア46に巻かれる巻回部45D1が環状コア46の端部に当たり、曲折される。
【0093】
(3)巻線の他端の反転
図22に示すように、次にモータがそれまでとは逆回転させると、コアクランプ機構30は今までと逆に右方向に直線移動されるので、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ機構43、43に固定されている環状コア46も右方向に直線移動され、環状コア46は回転クランプ16、16に接近してくる。
【0094】
環状コア46が回転クランプ16、16に接近すると共に、モータ15をさらに回転することにより、回転クランプ16、16もさらに反時計方向に回転する。回転クランプ16、16が回転すると、回転クランプ16、16に固定されている巻線45の他端45Bは回転する。このときコアクランプ機構30は右方向に直線移動されるので、横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46も直線移動する。それにより環状コア46と回転クランプ16、16間に直線状に張られていた巻線45が緩むため、巻線45は環状コア46に当たる付近の中間部分45C1と回転クランプ16、16に固定されている付近の中間部分45C2の離れている二カ所でループ状に曲げ始められる。
【0095】
回転クランプ16、16が反時計方向に180度(最初から270度)回転すると、巻線45の他端45Bは反転して環状コア46の孔46Cに向けられる。このときまだ環状コア46と回転クランプ16、16の間隔は巻線45の回転クランプ16、16から突出されている他端45Bの長さより長いので、巻線45の他端45Bは環状コア46のコア孔46Cに貫通していない。
【0096】
最初に曲げられる巻線45の中間部分45C1、45C2は離間しているので緩やかに曲げられる。環状コア46が右方向に直線移動され回転クランプ17に接近されに従い、さらに巻線45は大きく湾曲され、全体的に丸くループ状に曲げられる。
(4)巻線の他端の固定
図23に示すように、モータ33をさらに回転させると、コアクランプ機構30の横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46はさらに右方向に直線移動され回転クランプ16に接近されるので、環状コア46の孔46Cに巻線45の他端45Bが縦コアクランプ43の孔43Aを通過し貫通する。このとき第2固定クランプ機構20を上方へ直線移動させ、第2固定クランプ28、28を横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46のコア孔46Cと対向する位置し、第2固定クランプ28、28と環状コア46および回転クランプ16、16は横方向に並べられる。
【0097】
コアクランプ機構30をさらに右方向に直線移動し、環状コア46を回転クランプ16に接近させる。環状コア46を回転クランプ16、16に接近させると、巻線45の他端45Bはさらに環状コア46のコア孔46Cに貫通される。
【0098】
(5)巻線の右側巻回部の曲折の形成
図24に示すように、第2固定クランプ28、28はレール21に沿ってエアシンダーによりそれまで環状コア46が位置していた所まで直線移動させると、環状コア46に貫通された巻線45の他端45Bが第2固定クランプ機構20の第2固定クランプ28、28にも挿入される。
【0099】
図25に示すように、第2固定クランプ機構20の第2固定クランプ28、28を閉じて挿入された巻線45の他端45Bを固定する。回転クランプ機構5の回転クランプ16、16は開放しクランプを解除するので、今度は巻線45の他端45Bは固定クランプ20の第2固定クランプ28、28が回転クランプ16、16に代って固定する。
【0100】
図25に示すように、第3の支持台11を後退させることにより回転クランプ16、16を後退させ、回転クランプ16を巻線45の後方へ移動する。そしてモータ8を逆転させて、コアクランプ機構30が移動するのを邪魔しない位置まで回転クランプ16、16を時計方向に360度回転させながら下降させる。
【0101】
第2固定クランプ機構27の第2固定クランプ28、28で巻線45の他端45Bが固定された後、コアクランプ機構30を引き続き右方向に直線移動する。
【0102】
コアクランプ機構の支持台37を右方向に直線移動すると横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46は第2固定クランプ28、28から次第に離されるに従い、巻線45の一端45Aは第1クランプ3で固定されているので、巻線45の環状コア46に当たっている巻回部45D1が引っ張られ、次第に湾曲が狭められ巻かれる。
【0103】
図26に示すように、コアクランプ機構30が回転クランプ16、16を通り越して、右方向に直線移動させると、巻線45の湾曲部分は少なくなり、巻線45の巻回部45D1が縦コアクランプ機構43、43に設けられている切れ目43C(図4(C))を通過し、巻線の巻回部45D1を環状コイル46に巻付ける。
【0104】
図27に示すように、環状コア46に巻線45が巻かれた後、モータ8を回転させ、回転クランプ機構5を上方向に移動させさらに支持台11を前進させて、巻線45の他方の端部側45Bを回転クランプ機構5の回転クランプ16、16に通過させる。
【0105】
図28に示すように、回転クランプ機構5の回転クランプ16、16を閉じ巻線45の他端45Bを固定する。
【0106】
それまで巻線45の他端45Bを固定していた第2固定クランプ機構20の第2固定クランプ28、28を開放し、巻線45の他端45Bのクランプを解除し、第2固定クランプ28、28を後退させる。
(6)巻線の巻回部にテンション印加
図29に示すように、モータ36を回転させ、支持台39と共に縦コアクランプ43、43を傾け、環状コア46を右方向に傾斜させる。環状コア46を傾斜させながら右方向に移動させると、巻線45の湾曲部分はなくなり、巻線45の巻回部45D1が縦コアクランプ43、43に設けられている切れ目43C(図4(C))を通過し、直線的に張られ、巻線の巻回部45D1を環状コイル46の前述とは反対側の端部に沿って曲折し、環状コア46の所定の円周位置に巻付けられる。
【0107】
図30に示すように、環状コア46の傾斜を復帰させると、巻線45の環状コア46の端部に接触する巻回部45D1に更にテンションが加わり、巻線45が断面の四角形の環状コア46であっても、環状コア46のコアに沿って曲げられ、巻線45は環状コア46により密着して環状コア46の左側に巻かれることになる。
【0108】
このとき、モータ36に流れる電流値を検出し、環状コア46の傾斜復帰角度を制御し、モータ36に流れる電流値が規定値に達し、巻回部45D1が十分に環状コア46へ密着されたときモータに流れる電流を停止する。なお、密着のされ方がまだ不足のときには、環状コア46を元の状態よりさらに右に傾斜させる。
【0109】
図30に示すように、前述において、第2固定クランプ28、28を巻線45の他方部45Bから解放し、代って回転クランプ16、16で巻線45の他方部45Bを固定してから環状コア46を傾斜させたが、第2固定クランプ28、28で巻線45の他方部54Bを固定しているときに、環状コア46を左方向に傾斜させ、巻線45の環状コア46の端部に接触する巻回部45D1にテンションを加え、巻線45を環状コア46のコアに沿って曲げ、環状コア46に密着して中央部付近から環状コア46の左側に巻かれるようにしてもよい。
【0110】
(7)巻線を初期状態に復帰
図31に示すように、巻線45が環状コア46に巻かれた後、環状コア46を復帰させると共に、第2固定クランプ28、28を下方の直線移動し、元の位置に復帰させる。
【0111】
巻線45の他端45Bを固定した回転クランプ機構5を降下させる。このとき回転クランプ機構5の回転クランプ16、16は90度回転させながら降下させ、初期状態に復帰させる。
(8)二回目の巻線の開始
図31に示す状態で、前述と同様にモータ8を回転し第1の支持台7を上方向に移動させると共に、モータ15を回転し軸14を回転させる。
【0112】
(9)巻線の二回目の左側巻回部の曲折の形成。
【0113】
図32に示すように、再び回転クランプ機構5の回転クランプ16、16がコアクランプ機構30の高さまで上方向に移動すると共に、モータ15が回転し回転クランプ16、16の細長の回転クランプ16、16は反時計方向に90度回転される。またコアクランプ機構30は第2固定クランプ機構20がある位置を通り越して左方向に水平移動しているので、環状コア46に巻線45が当たる。このときコアクランプ機構30に固定されている環状コア46と回転クランプ16、16は横方向に直線状になるまで張って巻回部46D3にテンションを加える。
図33に示すように、モータ36をそれまでと逆回転させると、コアクランプ機構30は逆に右方向に直線移動され、横コアクランプ38、38,と横コアクランプ38、38に固定されている環状コア46も右方向に移動する。それと共に回転クランプ16、16の回転クランプ16、16はさらに反時計方向に回転する。回転クランプ16、16が回転されると、環状コア46と回転クランプ16、16間にある巻線45は曲げられる。
【0114】
図34に示すように、環状コア46の右方向への直線移動と共に、移動モータ15もさらに回転することにより、回転クランプ16、16もさらに反時計方向に回転し、巻線45の他端45Bをさらに回転する。回転クランプ16、16が反時計方向に180度(最初から270度)回転すると、巻線45の他端45Bは環状コア46の孔46Cに向けられる。
【0115】
図35に示すように、モータ36をさらに回転させると、コアクランプ機構30は右方向に直線移動し、横コアクランプ38、38,と横コアクランプ38、38に固定されている環状コア46は回転クランプ16、16に接近されるので、環状コア46の孔46Cに巻線45の他端45Bが縦コアクランプ43の孔43Aを通過し貫通する。このとき第2固定クランプ機構20も移動され、第2固定クランプ28、28が横コアクランプ38、38と縦コアクランプ機構43、43に固定されている環状コア46の孔46Cと同一高さに位置する。
(10)二回目の巻線の環状コアへの位置決め
図4(C)に示すように、このとき横コアクランプ38、38は開放され、環状コア46は縦コアクランプ43、43だけで固定される。そして縦コアクランプ43、43がモータ33にて反時計方向に回転され、環状コア46を2巻線分円周方向に回転させる。環状コア46を回転させた後、横コアクランプ38、38で環状コア46を固定し、縦コアクランプ43、43を元の位置に復帰させる。縦コアクランプ43、43を元の位置に復帰されたら、再び、横コアクランプ38、38と縦コアクランプ43、43で環状コア46を固定する。
【0116】
巻線45の巻回部45D3は環状コア46が回転されているので、縦コアクランプ43、43に有する切れ目46Cを通して前に巻かれた巻回部45D1より2巻線分円周方向にずれた環状コア46の部分に当たり、その位置に巻回される。
【0117】
図36に示すように、コアクランプ機構30をさらに右方向に直線移動し、固定クランプ27も右方向に移動させると、環状コア46の孔46Cを貫通した巻線45の他端45Bが第2固定クランプ機構20の第2固定クランプ28、28に挿入される。
【0118】
図37に示すように、第2の固定クランプ機構20の第2固定クランプ28、28を閉じ挿入された巻線45の他端45Bを回転クランプ16、16に代って固定する。回転クランプ機構5の回転クランプ16、16を開放しクランプを解除し、回転クランプ16、16を後退させてから360度回転させて下降させる。
【0119】
図38に示すように、コアクランプ機構30を引き続き右方向に直線移動すると、横コアクランプ38、38と縦コアクランプ43、43に固定されている環状コア46は固定クランプ28、28から離間する方向に直線移動し、巻線45の他端45Bは固定クランプ機構20の第2固定クランプ28、28で固定されているので、巻線45の環状コア46の端部に当たっている巻回部45D3が引っ張られ次第に巻かれる。
【0120】
環状コア46に巻線45が巻かれた後、モータ8を回転させ、回転クランプ機構5を上方向に移動させ、巻線45の他方の端部側45Bを回転クランプ機構5の回転クランプ16、16に通過させる。
【0121】
図39に示すように、回転クランプ機構5の回転クランプ16、16を閉じ巻線45の他端45Bを固定する。それまで巻線45の他端45Bを固定していた第2固定クランプ機構20の第2固定クランプ28、28を開放し、巻線45の他端45Bのクランプを解除し、第2固定クランプ28、28を後退させる。
【0122】
図40に示すように、巻線45の他端45Bは回転クランプ16、16で固定される。係る状態でモータ36を回転させ、支持台39と共に縦コアクランプ43、43を傾け、環状コア46を右方向に傾斜させる。環状コア46を傾斜させながら右方向に移動させると、巻線45の湾曲部分はなくなり、巻線45の巻回部45D1が縦コアクランプ43、43に設けられている切れ目43C(図4(C))を通過し、直線的に張られ、巻線の巻回部45D1を環状コイル46の前述とは反対側の端部に沿って曲折し、環状コア46の所定の円周位置に巻付けられる。
・ 図41に示すように、環状コア46の傾斜を復帰させると、巻線45の環状コア46の端部に接触する巻回部45D1に更にテンションが加わり、巻線45が断面の四角形の環状コア46であっても、環状コア46のコアに沿って曲げられ、巻線45は環状コア46により密着して環状コア46の左側に巻かれることになる。
【0123】
このとき、モータ36に流れる電流値を検出し、環状コア46の傾斜復帰角度を制御し、モータ36に流れる電流値が規定値に達し、巻回部45D1が十分に環状コア46へ密着されたときモータに流れる電流を停止する。なお、密着のされ方がまだ不足のときには、環状コア46を元の状態よりさらに傾斜させる。
【0124】
前述において、第2固定クランプ28、28を巻線45の他方部45Bから解放し、代って回転クランプ16、16で巻線45の他方部45Bを固定してから環状コア46を傾斜させたが、第2固定クランプ28、28で巻線45の他端45Bを固定しているときに、環状コア46を左方向に傾斜させることにより巻線45の環状コア46の端部に当たる巻回部45D1にテンションを加え、巻線45を環状コア46のコアに沿って曲げ、環状コア46に密着して中央部付近から環状コア46の左側に巻かれるようにしてもよい。
図41に示すように、巻線45が環状コア46に巻かれた後、環状コア46を復帰させると共に、回転クランプ16、16を下方の直線移動し、元の位置に復帰させる。巻線45の他端45Bを固定した回転クランプ機構5を降下させるが、このとき回転クランプ機構5の回転クランプ16、16は90度回転させながら降下させ、最初の状態に復帰させる。
(11)巻線を複数回
図2に示すように、係る動作を繰返し巻線45が環状コア46に巻かれるごとに環状コア46を横コアクランプ38、38にて反時計方向に回転させ、巻回部45D3、45D5、45D7,45D9まで環状コア46の円周左方向に巻回する。巻回部45D9まで巻かれたとき、横コアクランプ38、38を逆転し環状コア46を反時計方向に回転させる。
【0125】
今度は以前に巻かれた巻回部45D9と巻回部45D7間の環状コア46に巻回部45D2が巻かれる。
【0126】
係る動作を繰返し、巻回部45D7と巻回部45D5間に巻回部45D4、巻回部45D5と巻回部45D3間に巻回部45D6と巻回し、巻回部45D3と巻回部45D1間に巻回部45D8まで巻かれたとき、巻線45の他端45Bを最初に環状コア46に巻かれた巻回部45D1付近より取出し端子とする。
【0127】
図2に示す環状コア46の円周左側部分が巻かれた後、環状コア46の右側部分に巻線45の一端45A側を巻回する。
【図面の簡単な説明】
【0128】
【図1】本発明のトロイダルコイルの巻線方法に用いられた環状コアで、図1(A)は斜面図であり、図1(B)は断面図である。
【図2】本発明のトロイダルコイルの巻線方法に用い巻線を環状コアに巻回させた状態を示す側面図である。
【図3】本発明のトロイダルコイルの巻線方法の巻線をセットする前を示す模型図である。
【図4】本発明のトロイダルコイルの巻線方法の巻線をセットした状態を示す模型図である。
【図5】本発明のトロイダルコイルの巻線方法の巻線の他方の端部を上方向に移動させた状態を示す模型図である。
【図6】本発明のトロイダルコイルの巻線方法の他方の端部を上方向に移動させて環状コアを貫通させる前の状態を示す模型図である。
【図7】本発明のトロイダルコイルの巻線方法の他方の端部を環状コアを貫通させた状態を示す模型図である。
【図8】本発明のトロイダルコイルの巻線方法の他方の端部を固定クランプに貫通させた状態を示す模型図である。
【図9】本発明のトロイダルコイルの巻線方法の他方の端部を固定クランプに固定させた状態を示す模型図である。
【図10】本発明のトロイダルコイルの巻線方法の環状コアを元の方向に移動させ、巻線を環状コアに巻回させる状態を示す模型図である。
【図11】本発明のトロイダルコイルの巻線方法の巻線を環状コアに巻回させた状態を示す模型図である。
【図12】同じく本発明のトロイダルコイルの巻線方法の巻線を環状コアに巻回させた状態を示す模型図である。
【図13】本発明のトロイダルコイルの巻線方法の巻線を環状コアを傾斜させた状態を示す模型図である。
【図14】同じく本発明のトロイダルコイルの巻線方法の巻線を環状コアの傾斜を復帰させた状態を示す模型図である。
【図15】本発明のトロイダルコイルの巻線方法で2回目に巻線が巻かれる最初の状態を示す模型図である。
【図16】本発明のトロイダルコイルの巻線方法で巻線が2回目に巻かれる状態を示す模型図である。
【図17】本発明のトロイダルコイルの巻線方法に用いられた巻線装置の斜視図である。
【図18】本発明のトロイダルコイルの巻線方法に用いられたコアクランプ機構の横コアクランプおよび縦コアクランプと環状コアの関係を示す断面図で、図18(A)はクランプ前の状態を示し、図18(B)は固定した状態を示し、図18(C)は固定した状態で横コアクランプおよび縦コアクランプを傾斜させた状態を示す。
【図19】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線をセットする前を示す模型図である。
【図20】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線をセットした状態を示す模型図である。
【図21】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を浮上させて環状コアを貫通させる前の状態を示す模型図である。
【図22】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を浮上させて環状コアに貫通させた状態を示す模型図である。
【図23】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を浮上させて環状コアと第2の固定コアを貫通させた状態を示す模型図である。
【図24】本発明のトロイダルコイルの巻線方法の具体的実施例で他方の端部を固定コアにクランプさせた状態を示す模型図である。
【図25】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線の中央を環状コアに巻回させた状態を示す模型図である。
【図26】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアに巻回させた状態を示す模型図である。
【図27】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアに巻回させた状態を示す模型図である。
【図28】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアに巻回させた状態を示す模型図である。
【図29】本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアを傾斜させた状態を示す模型図である。
【図30】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で巻線を環状コアの傾斜を復帰させた状態を示す模型図である。
【図31】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の巻線をセットした状態を示す模型図である。
【図32】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の巻線の他方の端部を浮上させた状態を示す模型図である。
【図33】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の他方の端部を浮上させて環状コアを貫通させる前の状態を示す模型図である。
【図34】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の他方の端部を浮上させて環状コアと第2の固定コアを貫通させた状態を示す模型図である。
【図35】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の他方の端部を第2の固定コアにクランプさせた状態を示す模型図である。
【図36】本発明のトロイダルコイルの巻線方法の2回目のコアクランプ機構の横コアクランプおよび縦コアクランプを元の方向に移動させ、巻線の中央を環状コアに巻回させる状態を示す模型図である。
【図37】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目のコアクランプ機構の横コアクランプおよび縦コアクランプと環状コアを元の方向に移動させ、同じく巻線の中央を環状コアに巻回させる状態を示す模型図である。
【図38】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で2回目の巻線を環状コアに巻回させた状態を示す模型図である。
【図39】本発明のトロイダルコイルの巻線方法の2回目のコアクランプ機構の横コアクランプおよび縦コアクランプを元の方向に移動させ、巻線の中央を環状コアに巻回させる状態を示す模型図である。
【図40】本発明のトロイダルコイルの巻線方法の具体的実施例で2回目のコアクランプ機構の横コアクランプおよび縦コアクランプと環状コアを巻回させる状態を示す模型図である。
【図41】同じく本発明のトロイダルコイルの巻線方法の具体的実施例で初期状態に復帰させた状態を示す模型図である。
【図42】従来のトロイダルコイルの巻線方法で、図42(A)は芯材に巻線を巻く方法を示す斜視図で、図42(B)はトロイダルコイル状の巻かれた巻線の斜視図で、図42(C)は従来方法で巻かれたトロイダルコイルの斜視図である。
【符号の説明】
【0129】
1 第1固定クランプ機構
3 第1固定クランプ
5 回転クランプ機構
6 軸
16 回転クランプ
20 第2固定クランプ機構
28 第2固定クランプ
30 コアクランプ機構
38 横コアクランプ
43 縦コアクランプ
45 巻線
45A 一方の端部
45B 他方の端部
46 環状コア
【特許請求の範囲】
【請求項1】
巻線の一端を第1固定クランプに固定し、前記巻線をコアクランプ機構に固定された環状コアを貫通させ、前記巻線の他端を回転クランプで固定し、前記巻線を略直線状になるように前記第1固定クランプ、前記コアクランプ機構及び前記回転クランプを縦方向に並べて位置させ、
前記コアクランプ機構を横方向に移動させながら前記回転クランプを略90度回転させながら上方向に移動させ、前記環状コアと前記回転クランプ間の前記巻線を横方向に直線状になるまで張ってテンションを加え、前記コアクランプ機構と前記回転クランプを横方向に並べて位置させ、
続いて、前記コアクランプ機構を前記回転クランプに近づけるように横方向に移動させ、同時に前記回転クランプを略180度回転させて前記巻線の他端を前記環状コアに対向させて貫通させて第2固定クランプで固定し、前記第2固定クランプ、前記コアクランプ機構及び前記回転クランプが横方向に近接して並べて位置し、
前記コアクランプ機構を前記第2固定クランプあるいは前記回転クランプから横方向に遠ざけるように移動させて、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構間に前記巻線を横方向に直線状になるまで張ってテンションを加え、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構を横方向に並べて配置し、
前記コアクランプ機構を横方向に移動して初期位置に戻し、前記回転クランプを略90度回転させて前記コアクランプ機構の下側の初期位置に移動させて前記巻線を環状コアに巻回させることを特徴とするトロイダルコイル巻線方法。
【請求項2】
前記コアクランプ機構は横方向に直線状に移動し、前記回転クランプは縦方向に直線状に移動し、前記回転クランプの移動する方向に対して前記コアクランプ機構は左右に略対称に移動することを特徴とする請求項1に記載のトロイダルコイル巻線方法。
【請求項3】
前記コアクランプ機構には前記環状コアの縦側面をクランプする縦コアクランプを設け、前記縦コアクランプを傾斜させることにより前記環状コアを傾斜させ、前記環状コアに巻回された巻線に適度のテンションを加え、前記巻線を前記環状コアに密着させて巻回させることを特徴とする請求項1に記載のトロイダルコイル巻線方法。
【請求項4】
前記コアクランプ機構の前記縦コアクランプは、サーボモータにて傾斜させ、前記サーボモータの電流値を検出し、前記縦コアクランプの傾斜を制御して前記巻線に一定のテンションを加えることを特徴とする請求項3に記載のトロイダルコイル巻線方法。
【請求項5】
前記コアクランプ機構は前記環状コアの縦側面を固定する縦コアクランプと前記環状コアの横外周から固定する横コアクランプを備え、前記縦コアクランプは前記巻線を前記環状コアに巻回した後、前記環状コアを円周方向に回転して前記巻線のピッチ送りしてから前記横コアクランプで固定することを特徴とする請求項1に記載のトロイダルコイル巻線方法。
【請求項6】
前記縦コアクランプに巻線が環状コアに巻かれる巻回部を通過させる切れ目を設け、前記切れ目により巻線が環状コアに巻かれる位置を調整することを特徴とする請求項5に記載のトロイダルコイル巻線方法。
【請求項1】
巻線の一端を第1固定クランプに固定し、前記巻線をコアクランプ機構に固定された環状コアを貫通させ、前記巻線の他端を回転クランプで固定し、前記巻線を略直線状になるように前記第1固定クランプ、前記コアクランプ機構及び前記回転クランプを縦方向に並べて位置させ、
前記コアクランプ機構を横方向に移動させながら前記回転クランプを略90度回転させながら上方向に移動させ、前記環状コアと前記回転クランプ間の前記巻線を横方向に直線状になるまで張ってテンションを加え、前記コアクランプ機構と前記回転クランプを横方向に並べて位置させ、
続いて、前記コアクランプ機構を前記回転クランプに近づけるように横方向に移動させ、同時に前記回転クランプを略180度回転させて前記巻線の他端を前記環状コアに対向させて貫通させて第2固定クランプで固定し、前記第2固定クランプ、前記コアクランプ機構及び前記回転クランプが横方向に近接して並べて位置し、
前記コアクランプ機構を前記第2固定クランプあるいは前記回転クランプから横方向に遠ざけるように移動させて、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構間に前記巻線を横方向に直線状になるまで張ってテンションを加え、前記第2固定クランプあるいは前記回転クランプと前記コアクランプ機構を横方向に並べて配置し、
前記コアクランプ機構を横方向に移動して初期位置に戻し、前記回転クランプを略90度回転させて前記コアクランプ機構の下側の初期位置に移動させて前記巻線を環状コアに巻回させることを特徴とするトロイダルコイル巻線方法。
【請求項2】
前記コアクランプ機構は横方向に直線状に移動し、前記回転クランプは縦方向に直線状に移動し、前記回転クランプの移動する方向に対して前記コアクランプ機構は左右に略対称に移動することを特徴とする請求項1に記載のトロイダルコイル巻線方法。
【請求項3】
前記コアクランプ機構には前記環状コアの縦側面をクランプする縦コアクランプを設け、前記縦コアクランプを傾斜させることにより前記環状コアを傾斜させ、前記環状コアに巻回された巻線に適度のテンションを加え、前記巻線を前記環状コアに密着させて巻回させることを特徴とする請求項1に記載のトロイダルコイル巻線方法。
【請求項4】
前記コアクランプ機構の前記縦コアクランプは、サーボモータにて傾斜させ、前記サーボモータの電流値を検出し、前記縦コアクランプの傾斜を制御して前記巻線に一定のテンションを加えることを特徴とする請求項3に記載のトロイダルコイル巻線方法。
【請求項5】
前記コアクランプ機構は前記環状コアの縦側面を固定する縦コアクランプと前記環状コアの横外周から固定する横コアクランプを備え、前記縦コアクランプは前記巻線を前記環状コアに巻回した後、前記環状コアを円周方向に回転して前記巻線のピッチ送りしてから前記横コアクランプで固定することを特徴とする請求項1に記載のトロイダルコイル巻線方法。
【請求項6】
前記縦コアクランプに巻線が環状コアに巻かれる巻回部を通過させる切れ目を設け、前記切れ目により巻線が環状コアに巻かれる位置を調整することを特徴とする請求項5に記載のトロイダルコイル巻線方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【公開番号】特開2010−103434(P2010−103434A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−275874(P2008−275874)
【出願日】平成20年10月27日(2008.10.27)
【出願人】(596133636)株式会社タイホープロダクト (1)
【出願人】(508322059)
【出願人】(508322060)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月27日(2008.10.27)
【出願人】(596133636)株式会社タイホープロダクト (1)
【出願人】(508322059)
【出願人】(508322060)
【Fターム(参考)】
[ Back to top ]