
トロリーコンベヤ
【課題】搬送用走行体の定停止位置の下手側に下り勾配経路部が設けられているようなレイアウトにおいて効果的に活用出来るトロリーコンベヤを提供する。
【解決手段】プッシャー11のガイドレール8と搬送用走行体1のガイドレール6との間の間隔が広げられた広間隔領域Hに設けられた定停止位置P2で被動トロリー5が停止している搬送用走行体1を、ストッパー20の解除により、プッシャー11で被動ドッグ12を後押し駆動して発進させたとき、搬送用走行体1のロードトロリー3aが定停止位置P2の上手側に設けられたガイドレール6の上り勾配経路部22を走行している間に被動トロリー5が、広間隔領域Hの下手側に連続する標準間隔領域R内に達して、被動トロリー5の被動ドッグ12と逆止ドッグ13との間にプッシャー11が嵌合する構成。
【解決手段】プッシャー11のガイドレール8と搬送用走行体1のガイドレール6との間の間隔が広げられた広間隔領域Hに設けられた定停止位置P2で被動トロリー5が停止している搬送用走行体1を、ストッパー20の解除により、プッシャー11で被動ドッグ12を後押し駆動して発進させたとき、搬送用走行体1のロードトロリー3aが定停止位置P2の上手側に設けられたガイドレール6の上り勾配経路部22を走行している間に被動トロリー5が、広間隔領域Hの下手側に連続する標準間隔領域R内に達して、被動トロリー5の被動ドッグ12と逆止ドッグ13との間にプッシャー11が嵌合する構成。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行経路の始端停止位置に送り込まれた搬送用走行体を、この搬送用走行体の走行経路に沿って移動するプッシャーにより推進させるように構成されたトロリーコンベヤに関するものである。
【背景技術】
【0002】
この種のトロリーコンベヤとして、特許文献1に記載されるように、前記プッシャーがチエンによって駆動される形式のものや、特許文献2に記載されるように、前記プッシャーがワイヤーロープによって駆動される形式のもの、或いは特許文献3に記載されるように、搬送用走行体が台車形式のものであって、この搬送用走行体の走行経路の下側に前記プッシャーの移動経路が設けられたものなど、各種のものが知られている。そして、これら特許文献に示されるように、前記搬送用走行体は、ロードトロリーによって支持された本体部と、前記ロードトロリーより前方に連結バーを介して連結された被動トロリーを備え、当該被動トロリーには、前記プッシャーが後押しする被動ドッグとこのプッシャーより被動トロリーが先行移動するのを阻止する逆止ドッグが設けられるものである。
【0003】
而して、この種のトロリーコンベヤでは、搬送用走行体を定停止位置で停止させるために、この定停止位置を、前記プッシャーが被動ドッグにのみ係合するように前記プッシャーのガイドレールと搬送用走行体のガイドレールとの間の間隔が広げられた広間隔領域に設け、前記被動ドッグの移動経路中に進出させたストッパーにより、前記被動ドッグをプッシャーと係合しない高さ(又は姿勢)に切り換えると共に逆止ドッグを受け止めて、搬送用走行体を定停止位置で停止させるように構成される。そして前記定停止位置を含む前記広間隔領域の下手側には、前記プッシャーが被動ドッグと逆止ドッグとの間に嵌合するように前記両ガイドレール間の間隔が狭められた標準間隔領域が設けられる。前記定停止位置で停止している搬送用走行体を発進させる場合、前記ストッパーを退出させて被動ドッグをプッシャーと係合し得る元の高さ(又は姿勢)に切り換えると、この定停止位置に進入して来るプッシャーが被動ドッグと係合し、定停止位置で停止していた搬送用走行体を推進させることになるが、このままでは逆止ドッグの機能が失われた状態であるから、当該プッシャーで推進される搬送用走行体が前記広間隔領域から標準間隔領域に進入することにより、前記プッシャーが逆止ドッグと被動ドッグとの間で挟まれる定常駆動状態に切り換わるように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−92761号公報
【特許文献2】特開平7−329773号公報
【特許文献3】特開平11−48960号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように構成されるトロリーコンベヤにおいて、定停止位置で停止している搬送用走行体を発進させるとき、プッシャーと係合し得る元の高さ(又は姿勢)に切り換えられた被動ドッグをプッシャーが後押し駆動するのであるが、このとき、搬送用走行体に被搬送物が積載されていない、積載されている被搬送物が軽量物である、プッシャーの定常駆動速度が比較的高速に設定されている、などの理由によって、プッシャーが被動ドッグを介して搬送用走行体を蹴飛ばすような状況になって、その反動で搬送用走行体がプッシャーよりも先に進む先走り状態になる場合があった。このような先走り状態が生じると、先走り状態のままで搬送用走行体が前記広間隔領域から標準間隔領域に進入して走行することになる。
【0006】
上記のような先走り現象が長く続くと、前記定停止位置の下手側、具体的には前記広間隔領域に続く標準間隔領域の下手側に搬送用走行体の下り勾配経路部が連設されているようなレイアウトの場合、先走り状態の搬送用走行体がそのまま下り勾配経路部に進入して暴走する恐れがあった。又、上記のような搬送用走行体の先走り現象を防止するため、定停止位置の下手側に搬送用走行体に対するブレーキ装置を併設する解決手段も考えられたが、相応のコストアップを伴うだけでなく、ブレーキ装置を最も効果的な場所に取り付けることが出来ない場合もあり、仮に取り付けられたとしても、搬送用走行体が重量物を搬送するトロリーコンベヤでは、十分な効果が得られない。
【課題を解決するための手段】
【0007】
本発明は、上記のような従来の問題点を解消することのできるトロリーコンベヤを提案するものであって、請求項1に記載の本発明に係るトロリーコンベヤは、後述する実施例との関係を理解し易くするために、当該実施例の説明において使用した参照符号を括弧付きで付して示すと、走行経路中の定停止位置(P2)で停止待機している搬送用走行体(1)を、この搬送用走行体(1)の走行経路に沿って移動するプッシャー(11)により推進させるように構成されたトロリーコンベヤであって、前記搬送用走行体(1)は、ロードトロリー(3a,3b)によって支持された本体部(2)と、前記ロードトロリー(3a,3b)より前方に連結バー(4)を介して連結された被動トロリー(5)を備え、当該被動トロリー(5)には、前記プッシャー(11)が後押しする被動ドッグ(12)とこのプッシャー(11)より被動トロリー(5)が先行移動するのを阻止する逆止ドッグ(13)が設けられ、前記定停止位置(P2)は、前記プッシャー(11)が被動ドッグ(12)にのみ係合するように前記プッシャー(11)のガイドレール(8)と前記搬送用走行体(1)のガイドレール(6)との間の間隔が広げられた広間隔領域(H)に設けられると共に、この定停止位置(P2)には、前記被動ドッグ(12)を前記プッシャー(11)と係合しない高さに切り換える出退自在なストッパー(20)が配設され、前記広間隔領域(H)の下手側に、前記プッシャー(11)が被動ドッグ(12)と逆止ドッグ(13)との間に嵌合するように前記両ガイドレール(6,8)間の間隔が狭められた標準間隔領域(R)が設けられたトロリーコンベヤにおいて、前記定停止位置(P2)の上手側の前記搬送用走行体(1)のガイドレール(6)に上り勾配経路部(22)が設けられ、前記ストッパー(20)が解除されて前記プッシャー(11)による搬送用走行体(1)の推進が開始された後、前記ロードトロリー(3a)が前記上り勾配経路部(22)を走行している間に前記被動トロリー(5)が前記標準間隔領域(R)内に達する構成になっている。
【0008】
上記本発明を実施する場合、具体的には請求項2に記載のように、前記ストッパー(20)が解除されて前記プッシャー(11)による搬送用走行体(1)の推進が開始されると同時に、前記ロードトロリー(3a)が前記上り勾配経路部(22)に進入するように構成することが出来る。
【0009】
又、請求項3に記載のように、前記搬送用走行体(1)の走行経路には、前記標準間隔領域(R)における前記両ガイドレール(6,8)間の間隔よりも更に当該両ガイドレール(6,8)間の間隔が狭まった狭間隔領域(L)を前記標準間隔領域(R)の下手側に連続するように設け、この狭間隔領域(R)によって前記搬送用走行体(1)の下り勾配経路部(21)を構成することが出来る。
【0010】
更に、本発明のトロリーコンベヤは、請求項4に記載のように、搬送用走行体(1)の走行経路として、上手側駆動手段(7A)のプッシャー(11)で搬送用走行体(1)が推進される上手側走行経路(16A)と、下手側駆動手段(7B)のプッシャー(11)で搬送用走行体(1)が推進される下手側走行経路(16B)とが設けられている場合に、前記走行経路の定停止位置(P2)は、前記下手側走行経路(16B)の始端部に設け、前記上手側走行経路(16A)の終端で停止した搬送用走行体(1)を前記下手側走行経路(16B)の定停止位置(P2)に送り込むフィーダー(23)を併設することによって実施することが出来る。
【発明の効果】
【0011】
請求項1に記載の本発明の構成によれば、出退自在なストッパーにより搬送用走行体を停止させる定停止位置は、プッシャーが被動ドッグにのみ係合するように前記プッシャーのガイドレールと前記搬送用走行体のガイドレールとの間の間隔が広げられた広間隔領域に設定されるので、従来周知のように、前記ストッパーにより被動ドッグをプッシャーと係合しない高さに切り換えたとき、当該ストッパーで逆止ドッグを受け止めるように構成して、搬送用走行体を定位置に確実に停止させることが出来る。しかも、前記ストッパーを退出させて被動ドッグをプッシャーと係合し得る元の高さに戻し、当該被動ドッグをプッシャーにより後押しさせて、定停止位置で停止していた搬送用走行体を推進させるとき、仮に被動トロリー(被動ドッグ)がプッシャーで蹴飛ばされて搬送用走行体の先走り現象が発生したとしても、当該搬送用走行体の本体部を支持するロードトロリーが前記上り勾配経路部を走行するときには当該搬送用走行体の走行抵抗が非常に大きくなり、先走り状態にあった搬送用走行体に大きな制動力が作用して減速乃至は停止することになる。換言すれば、搬送用走行体の前記ロードトロリーが前記上り勾配経路部を走行する過程において、プッシャーが被動トロリーの被動ドッグを後押しする本来の状態に必ず戻される。この状態で搬送用走行体の前記被動トロリーが前記広間隔領域に続く標準間隔領域に進入し、プッシャーを被動ドッグと逆止ドッグとで挟む通常の駆動状態に切り換わる。
【0012】
上記のように本発明の構成によれば、定停止位置で停止していた搬送用走行体をプッシャーで駆動し始めるときに仮に搬送用走行体の先走り現象が生じたとしても、当該定停止位置より下手側の標準間隔領域に搬送用走行体の被動トロリーが進入する段階では必ず、プッシャーを被動ドッグと逆止ドッグとで挟む通常の駆動状態とすることが出来、搬送用走行体が先走り状態のままで前記標準間隔領域を通過する恐れがなくなる。従って、請求項3に記載のように、前記標準間隔領域に続いて前記搬送用走行体の下り勾配経路部が構成されている場合でも、搬送用走行体が先走り状態のままで前記下り勾配経路部に進入して、この下り勾配経路部を搬送用走行体が暴走落下する危険な事態を確実に回避出来る。しかも、搬送用走行体に対するブレーキ装置を追加する構成と比較して、極めて簡単且つ安価に実施することが出来、大重量物を搬送するトロリーコンベヤであっても、搬送用走行体の先走り状態での走行が或る領域を超えて長く続くことを確実に防止することが出来る。特に請求項2に記載の構成によれば、定停止位置からの搬送用走行体の駆動開始時に当該搬送用走行体が先走り状態になるのをほぼ完全に防止することが出来る。
【0013】
尚、上記のように本発明の構成は、特に請求項3に記載の構成において効果を発揮するものである。又、本発明が請求項4に記載の構成において実施される場合、上手側走行経路の終端で停止した搬送用走行体を前記下手側走行経路の定停止位置に送り込む過程において、被搬送物の荷重が作用していない被動トロリーのみを前記定停止位置の上手側の上り勾配経路部を通過させれば良いので、上手側走行経路の終端で停止した搬送用走行体を前記下手側走行経路の定停止位置に送り込むためのフィーダーに掛かる負荷が小さくて済み、当該フィーダーを含む設備の大幅なコストアップを免れる。
【図面の簡単な説明】
【0014】
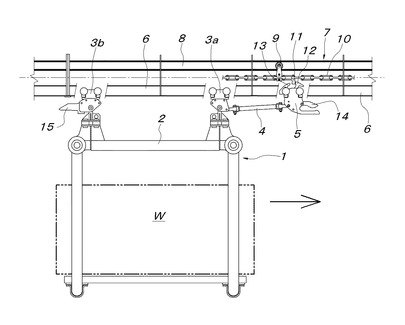
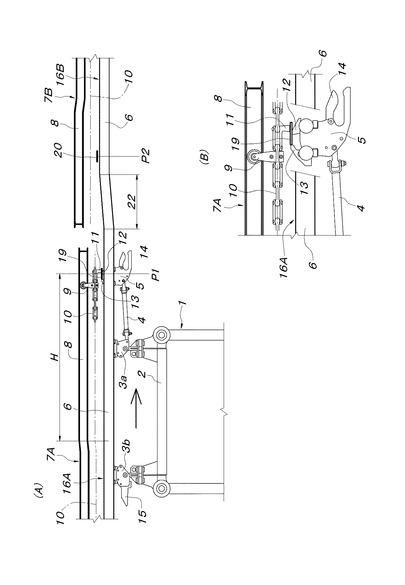
【図1】図1は、走行経路中の搬送用走行体を示す一部切欠き側面図である。
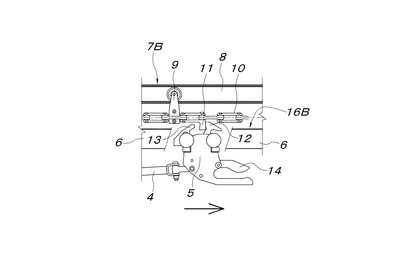
【図2】図2は、図1の要部の拡大図である。
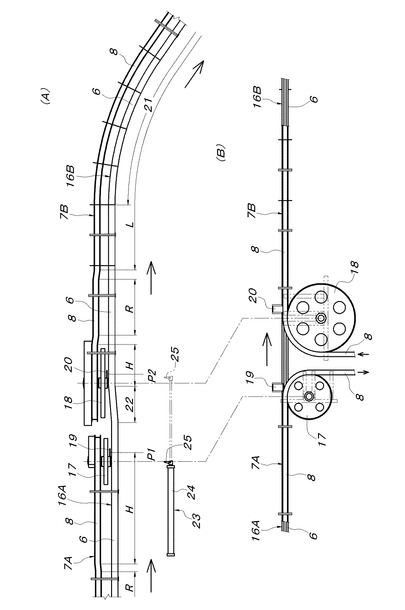
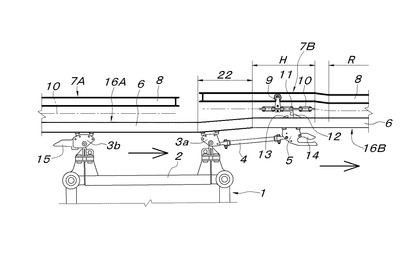
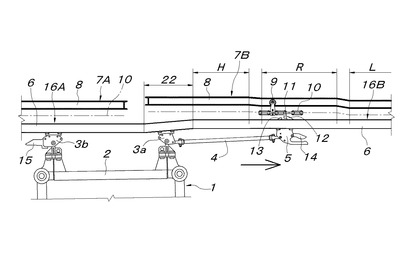
【図3】図3Aは、上手側走行経路部から下手側走行経路部への搬送用走行体の乗り移り箇所の構成を説明する側面図、図3Bは、同A図の平面図である。
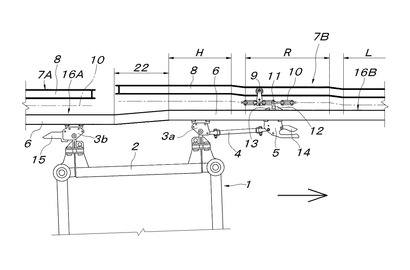
【図4】図4Aは、上手側走行経路部の終端定停止位置で搬送用走行体が停止した状態を説明する側面図、図4Bは、同A図の要部の一部切欠き拡大図である。
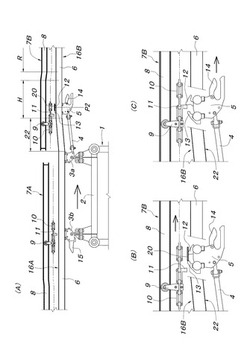
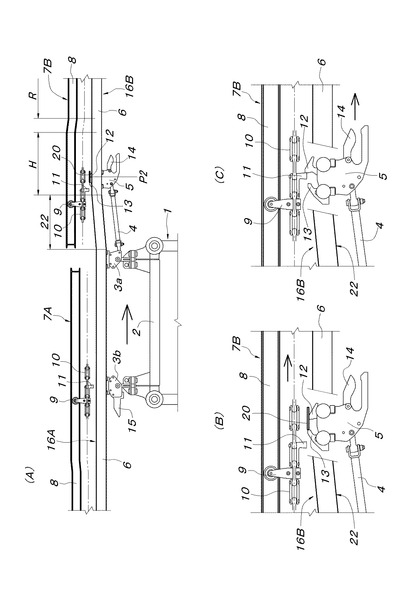
【図5】図5Aは、下手側走行経路部の始端定停止位置で搬送用走行体が停止した状態を説明する側面図、図5Bは、同A図の要部の一部切欠き拡大図、図5Cは、同B図の状態から搬送用走行体が駆動開始される段階を説明する要部の一部切欠き拡大図である。
【図6】図6は、搬送用走行体の被動トロリーが広間隔領域内を走行する段階を説明する側面図である。
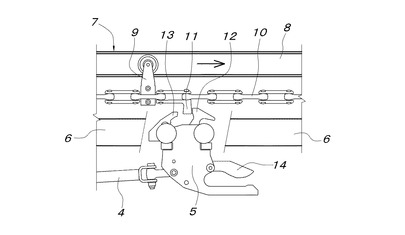
【図7】図7は、搬送用走行体の被動トロリーが標準間隔領域内を走行する段階を説明する側面図である。
【図8】図8は、搬送用走行体の被動トロリーが狭間隔領域内を走行する段階を説明する側面図である。
【図9】図9は、図8の要部の一部切欠き拡大図である。
【図10】図10は、別の実施例を説明する側面図である。
【発明を実施するための形態】
【0015】
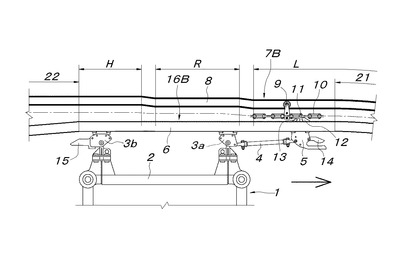
図1及び図2において、1は搬送用走行体であって、被搬送物Wを支持するハンガー形式の本体部2の前後両端部を吊り下げる前後2つのロードトロリー3a,3bと、前側ロードトロリー3aに連結バー4を介して前方に連結された被動トロリー5を備えている。搬送用走行体1の走行経路は、前記ロードトロリー3a,3bと被動トロリー5を移動自在に支持するガイドレール6によって構成されている。7は搬送用走行体1の駆動手段であって、搬送用走行体1のガイドレール6に沿って当該ガイドレール6の上側に架設されたガイドレール8と、このガイドレール8に長さ方向適当間隔おきの位置を吊り下げるトロリー9を介して吊り下げられた駆動チエン10と、この駆動チエン10の長さ方向適当間隔おきの位置でトロリー9の近傍位置において駆動チエン10から下向きに突設されたプッシャー11とから構成されている。駆動チエン10は、従来周知のように、搬送用走行体1の走行経路(ガイドレール6)に沿った経路部分を含む循環経路を回動するもので、当該循環経路中の適当箇所に配設されたモーター駆動の歯輪によって所定速度で駆動される。
【0016】
搬送用走行体1の被動トロリー5には、昇降自在な被動ドッグ12と当該被動ドッグ12の後方に位置する逆止ドッグ13、及び被動トロリー5から前方に延出する上下揺動自在な被操作片14が設けられている。被動ドッグ12と被操作片14は、この被操作片14の上動に連動して被動ドッグ12が上動限位置から下降するように互いに連動連結されると共に、被操作片14に作用する重力によって、被動ドッグ12が上動限位置に付勢保持されるように構成されている。又、搬送用走行体1の後側ロードトロリー3bには、搬送用走行体1どうしが接近したときに、後ろ側の搬送用走行体1の被動トロリー5の被操作片14を上動させて、当該後ろ側の搬送用走行体1の被動トロリー5の被動ドッグ12を下降させるための操作片15が後方向きに突設されている。
【0017】
逆止ドッグ13は前方下方へ倒伏自在に軸支されたもので、重力により起立姿勢に付勢保持されている。この起立姿勢にある逆止ドッグ13は、上動限位置にある被動ドッグ12の上端よりも一段低くなるように構成されている。而して、搬送用走行体1を駆動手段7で推進させる駆動経路部分では、搬送用走行体1の後方から接近移動してくるプッシャー11が逆止ドッグ13を前方下方へ倒伏させて当該逆止ドッグ13の位置を通過した直後に上動限位置の被動ドッグ12の上端部に当接して後押しし、この被動ドッグ12を介して被動トロリー5、延いては搬送用走行体1を前進走行させるように、搬送台車1(トロリー3a,3b,5)のガイドレール6とプッシャー11(駆動チエン10)のガイドレール8との間の間隔が標準間隔に設定されている。プッシャー11が搬送用走行体1を駆動しているとき、逆止ドッグ13は起立姿勢に復帰してプッシャー11の後側に位置し、搬送用走行体1の被動トロリー5がプッシャー11より先行移動するのを、プッシャー11に当接して阻止する。
【0018】
図3に示すように、搬送用走行体1の走行経路には、上手側駆動手段7Aによって搬送用走行体1が走行駆動される上手側走行経路16Aと、下手側駆動手段7Bによって搬送用走行体1が走行駆動される下手側走行経路16Bとに区画されている。上手側駆動手段7Aと下手側駆動手段7Bは、図1及び図2に基づいて説明した駆動手段7と同一構造のものであり、上手側走行経路16Aと下手側走行経路16Bとの接続箇所には、上手側駆動手段7Aの駆動チエン10を上手側走行経路16Aから横側方に退出させる案内歯輪17と、下手側駆動手段7Bの駆動チエン10を下手側走行経路16B上へ導入する案内歯輪18が軸支されている。又、上手側走行経路16Aの終端部と下手側走行経路16Bの始端部には定停止位置P1,P2が設定され、これら各定停止位置P1,P2には、搬送用走行体1をこれら各定停止位置P1,P2で停止させるための出退自在なストッパー19,20が設けられている。
【0019】
上手側走行経路16Aの終端部と下手側走行経路16Bの始端部には、搬送用走行体1のガイドレール6とプッシャー11のガイドレール8との間の間隔が、図1及び図2に示した標準間隔よりも広くなった広間隔領域Hが設けられ、上手側走行経路16Aの終端部の定停止位置P1、即ち、ストッパー19は、この上手側走行経路16Aの終端部の広間隔領域Hの終端部に設けられ、下手側走行経路16Bの始端部の定停止位置P2、即ち、ストッパー20は、この下手側走行経路16Bの始端部の広間隔領域Hの始端近くの位置に設けられている。
【0020】
而して、図4及び図5に示すように、各ストッパー19,20は、搬送用走行体1の被動トロリー5における被動ドッグ12の移動経路に対して直角水平方向に、ソレノイドやシリンダーユニットなどのアクチュエーターによって出退移動自在なものであって、被動ドッグ12の移動経路内に進出した作用位置にあるとき、被動ドッグ12の前側傾斜面を利用して、当該被動ドッグ12を被動トロリー5の前進移動に伴って押し下げ、当該被動ドッグ12を後押ししていたプッシャー11から被動ドッグ12を下方に逃がした後、逆止ドッグ13の上端部に当接して被動トロリー5(搬送用走行体1)を受け止めるように構成されている。このストッパー19,20が被動トロリー5を定停止位置P1,P2で停止させているとき、当該ストッパー19,20の上面と起立姿勢にある逆止ドッグ13の上端とはほぼ同一レベルにあって、後続のプッシャー11は、これらストッパー19,20及び逆止ドッグ13の上側を移動通過出来るように構成されている。
【0021】
図3に示すように、搬送用走行体1の下手側走行経路16Bには、その始端部の定停止位置P2を含む広間隔領域Hの下手側に連続して標準間隔領域Rが設けられ、この標準間隔領域Rの下手側に連続して狭間隔領域Lが設けられている。標準間隔領域Rは、図1に基づいて説明したように、搬送用走行体1のガイドレール6とプッシャー11のガイドレール8との間の間隔が、プッシャー11が被動ドッグ12と逆止ドッグ13との間に嵌合し、逆止ドッグ13が機能する状態でプッシャー11が被動トロリー5(搬送用走行体1)を駆動することが出来る間隔となっている領域であり、狭間隔領域Lは、搬送用走行体1のガイドレール6とプッシャー11のガイドレール8との間の間隔が、標準間隔領域Rでの間隔よりも更に小さくなって、プッシャー11が被動ドッグ12と逆止ドッグ13との間に一層深く嵌合する領域である。而して、この下手側走行経路16Bにおける広間隔領域Hと標準間隔領域Rは、それぞれ必要最小限の長さに設定され、標準間隔領域Rに続く狭間隔領域Lは、そのほぼ全長において、搬送用走行体1の下り勾配経路部21を構成するものである。勿論、この狭間隔領域Lで構成される搬送用走行体1の下り勾配経路部21では、下手側駆動手段7Bのプッシャー11のガイドレール8も搬送用走行体1のガイドレール6に沿って下り勾配に形成されている。
【0022】
上記各広間隔領域H、標準間隔領域R、及び狭間隔領域Lは、搬送用走行体1のガイドレール6に対するプッシャー11のガイドレール8の高さを変えることによって構成されるものであり、広間隔領域Hと標準間隔領域Rとの間、及び標準間隔領域Rと狭間隔領域Lとの間には、プッシャー11のガイドレール8に上下方向の勾配部が形成されている。そして、下手側走行経路16Bの始端部に設けられた広間隔領域Hの上手側には、搬送用走行体1の上り勾配経路部22が、搬送用走行体1のガイドレール6の部分的な上り勾配部によって形成されている。更に、図3Aに示すように、上手側走行経路16Aの終端部の定停止位置P1から下手側走行経路16Bの始端部の定停止位置P2に搬送用走行体1を送り込むフィーダー23が併設されている。このフィーダー23は、例えばシリンダーユニット24によって押し引き駆動される逆止プッシャー25によって構成することが出来るもので、搬送用走行体1の適当な部分を後押しすることにより、当該搬送用走行体1を定停止位置P1から定停止位置P2に送り込むことが出来る。勿論、このフィーダー23は、シリンダーユニット24と逆止プッシャー25から構成されるものに限定されるものではなく、チエンやスクリュー駆動の逆止プッシャーによって構成することも出来る。
【0023】
以上の構成において、上手側走行経路16Aを上手側駆動手段7Aのプッシャー11によって駆動される搬送用走行体1が上手側走行経路16Aの終端部に到着する前に、定停止位置P1のストッパー19を作用位置まで進出させておく。而して、図1及び図2に示す状態で、上手側駆動手段7Aのプッシャー11によって駆動される搬送用走行体1が上手側走行経路16Aの終端部に到着すると、図4に示すように、プッシャー11で後押しされている被動トロリー5の被動ドッグ12がストッパー19によって押し下げられ、プッシャー11が被動ドッグ12から外れてそのまま通過し、ストッパー19は逆止ドッグ13に当接して被動トロリー5を受け止め、搬送用走行体1が定停止位置P1で自動停止することになる。このとき、フィーダー23の逆止プッシャー25は後退限位置にあって、この逆止プッシャー25を倒して通過した搬送用走行体1の後押し箇所が当該逆止プッシャー25の後ろ側に位置している。又、搬送用走行体1がストッパー19により定停止位置P1で停止待機している状態では、この定停止位置P1が広間隔領域H内にあるので、上手側駆動手段7Aのプッシャー11は、定停止位置P1で停止待機している搬送用走行体1の被動トロリー5の上を問題なく通過移動することが出来る。
【0024】
次に、下手側走行経路16Bの始端部の定停止位置P2のストッパー20を作用位置まで進出させてある状態において、定停止位置P1のストッパー19を退出させ、被動ドッグ12を元の上動限位置に復帰させた後、フィーダー23の逆止プッシャー25をシリンダーユニット24により進出限位置まで進出移動させることにより、定停止位置P1で停止していた搬送用走行体1を下手側走行経路16Bの始端部に向けて送り込む。このフィーダー23の逆止プッシャー25による搬送用走行体1の送込み作用によって、図5A及び図5Bに示すように、当該搬送用走行体1の被動トロリー5の被動ドッグ12が定停止位置P2のストッパー20で押し下げられると共に逆止ドッグ13が当該ストッパー20で受け止められて、搬送用走行体1が定停止位置P2で自動停止することになる。このとき、当該搬送用走行体1の前側ロードトロリー3aは、ガイドレール6の上り勾配経路部22の直前で停止している。換言すれば、このような状態となるように、搬送用走行体1の前側ロードトロリー3aと被動トロリー5との間の距離に対応して、ガイドレール6の上り勾配経路部22の位置が決められている。尚、この下手側走行経路16Bの始端部の定停止位置P2への搬送用走行体1の送込みは、下手側走行経路16Bに併設の下手側駆動手段7Bのプッシャー11が定停止位置P2に到着するまでに十分な時間的余裕が確保出来るタイミングで行われる。
【0025】
図5A及び図5Bに示すように、搬送用走行体1がストッパー20により定停止位置P2で停止待機している状態では、当該定停止位置P2が広間隔領域H内にあるので、下手側駆動手段7Bのプッシャー11は、定停止位置P2で停止待機している搬送用走行体1の被動トロリー5の上を問題なく通過移動することが出来る。そして定停止位置P2で停止待機している搬送用走行体1を走行駆動させるプッシャー11が定停止位置P2に到着する前に、定停止位置P2のストッパー20を退出させて被動ドッグ12を元の上動限位置まで復帰させる。この結果、図5Cに示すように、定停止位置P2に向かって移動してくる下手側駆動手段7Bのプッシャー11が被動トロリー5の被動ドッグ12に当接して後押しを開始し、定停止位置P2で停止していた搬送用走行体1の駆動が開始される。
【0026】
定停止位置P2で停止していた搬送用走行体1の駆動が開始されて、図6に示すように、被動トロリー5が広間隔領域H内を走行し始めるのに伴って、当該搬送用走行体1の前側ロードトロリー3aがガイドレール6の上り勾配経路部22を登り始める。換言すれば、搬送用走行体1には、被搬送物Wの荷重を負担している前側ロードトロリー3aがガイドレール6の上り勾配経路部22を昇ることに起因する大きな走行抵抗が作用するので、停止していた搬送用走行体1の被動ドッグ12にプッシャー11が勢い良く衝突しても、当該搬送用走行体1が蹴り出されるような状態にはならず、当該搬送用走行体1は確実にプッシャー11と一体の状態で走行を開始することになる。
【0027】
搬送用走行体1が下手側走行経路16Bを走行するのに伴って、下手側駆動手段7Bのプッシャー11で後押し駆動されている被動トロリー5は、定停止位置P2のあった広間隔領域Hから標準間隔領域R内に移行し、図7に示すように、当該プッシャー11が被動トロリー5の被動ドッグ12と逆止ドッグ13との間に嵌合する定常駆動状態において搬送用走行体1が走行駆動される。そして続いて搬送用走行体1の被動トロリー5が狭間隔領域Lに進入し、図8及び図9に示すように、プッシャー11が被動トロリー5の被動ドッグ12と逆止ドッグ13との間に更に深く嵌合する状態で搬送用走行体1の走行駆動が継続され、当該狭間隔領域Lによって構成された下り勾配経路部21を搬送用走行体1がプッシャー11の移動速度で安全確実に走行駆動されることになる。
【0028】
尚、図10に示すように、搬送用走行体1の前側ロードトロリー3aと被動トロリー5との間の距離が長い場合、被動トロリー5が広間隔領域H内から標準間隔領域Rに移って当該標準間隔領域R内を搬送用走行体1の被動トロリー5が走行するときに、当該搬送用走行体1の前側ロードトロリー3aが上り勾配経路部22を昇るように構成することも出来る。この場合、広間隔領域H内の定停止位置P2において停止している搬送用走行体1の被動トロリー5をプッシャー11が駆動開始するとき、前側ロードトロリー3aは上り勾配経路部22の上手側に離れて位置しているので、プッシャー11が被動トロリー5の被動ドッグ12を勢い良く蹴り出す恐れはあるが、仮にこのような状況になっても、被動トロリー5が広間隔領域Hから標準間隔領域R内に移った段階で、前側ロードトロリー3aが上り勾配経路部22を昇ることによる走行抵抗を搬送用走行体1が受けて減速乃至は停止し、後追い状態のプッシャー11が標準間隔領域R内で被動トロリー5に追いつき、当該プッシャー11は逆止ドッグ13を前方に倒して通過した後、被動ドッグ12に当接して確実に定常駆動状態になり、この定常駆動状態で被動トロリー5が標準間隔領域Rからこれに続く狭間隔領域L内に進入することになる。従って、プッシャー11が被動ドッグ12と逆止ドッグ13との間に嵌合しないまま惰性で走行する搬送用走行体1が狭間隔領域L内に進入し、下り勾配経路部21を暴走落下する恐れはない。
【0029】
尚、搬送用走行体1の構成は上記実施例のものに限定されない。例えば、被搬送物Wが長尺の場合、後側ロードトロリー3bに連結バーを介して後方に連結された従動トロリーが追加され、この縦動トロリーに前記後側ロードトロリー3bに設けられた操作片15が設けられたものであっても良い。又、搬送用走行体1がガイドレール6から吊り下げられた形式のものを示したが、ガイドレール上を走行する台車形式の搬送用走行体であっても良い。この場合、搬送用走行体の各トロリーや駆動手段7,7A,7Bは、上記実施例とは上下逆の態様になる。更に、プッシャー11が駆動チエン10に取り付けられた駆動手段7,7A,7Bを例示したが、ワイヤーロープにプッシャーが設けられた駆動手段であっても良い。
【産業上の利用可能性】
【0030】
本発明のトロリーコンベヤは、特に自動車車体を吊り下げ搬送するトロリーコンベヤに好適なものであって、搬送用走行体の定停止位置の下手側に下り勾配経路部が設けられているようなレイアウトにおいて効果的に活用出来るものである。
【符号の説明】
【0031】
1 搬送用走行体
2 本体部
3a,3b ロードトロリー
4 連結バー
5 被動トロリー
6 搬送用走行体のガイドレール
7 駆動手段
7A 上手側駆動手段
7B 下手側駆動手段
8 プッシャーのガイドレール
10 駆動チエン
11 プッシャー
12 被動ドッグ
13 逆止ドッグ
14 被操作片
15 操作片
16A 上手側走行経路
16B 下手側走行経路
17,18 案内歯輪
19,20 ストッパー
21 下り勾配経路部
22 上り勾配経路部
23 フィーダー
24 シリンダーユニット
25 逆止プッシャー
P1 上手側走行経路の定停止位置
P2 下手側走行経路の定停止位置
H 広間隔領域
R 標準間隔領域
L 狭間隔領域
【技術分野】
【0001】
本発明は、走行経路の始端停止位置に送り込まれた搬送用走行体を、この搬送用走行体の走行経路に沿って移動するプッシャーにより推進させるように構成されたトロリーコンベヤに関するものである。
【背景技術】
【0002】
この種のトロリーコンベヤとして、特許文献1に記載されるように、前記プッシャーがチエンによって駆動される形式のものや、特許文献2に記載されるように、前記プッシャーがワイヤーロープによって駆動される形式のもの、或いは特許文献3に記載されるように、搬送用走行体が台車形式のものであって、この搬送用走行体の走行経路の下側に前記プッシャーの移動経路が設けられたものなど、各種のものが知られている。そして、これら特許文献に示されるように、前記搬送用走行体は、ロードトロリーによって支持された本体部と、前記ロードトロリーより前方に連結バーを介して連結された被動トロリーを備え、当該被動トロリーには、前記プッシャーが後押しする被動ドッグとこのプッシャーより被動トロリーが先行移動するのを阻止する逆止ドッグが設けられるものである。
【0003】
而して、この種のトロリーコンベヤでは、搬送用走行体を定停止位置で停止させるために、この定停止位置を、前記プッシャーが被動ドッグにのみ係合するように前記プッシャーのガイドレールと搬送用走行体のガイドレールとの間の間隔が広げられた広間隔領域に設け、前記被動ドッグの移動経路中に進出させたストッパーにより、前記被動ドッグをプッシャーと係合しない高さ(又は姿勢)に切り換えると共に逆止ドッグを受け止めて、搬送用走行体を定停止位置で停止させるように構成される。そして前記定停止位置を含む前記広間隔領域の下手側には、前記プッシャーが被動ドッグと逆止ドッグとの間に嵌合するように前記両ガイドレール間の間隔が狭められた標準間隔領域が設けられる。前記定停止位置で停止している搬送用走行体を発進させる場合、前記ストッパーを退出させて被動ドッグをプッシャーと係合し得る元の高さ(又は姿勢)に切り換えると、この定停止位置に進入して来るプッシャーが被動ドッグと係合し、定停止位置で停止していた搬送用走行体を推進させることになるが、このままでは逆止ドッグの機能が失われた状態であるから、当該プッシャーで推進される搬送用走行体が前記広間隔領域から標準間隔領域に進入することにより、前記プッシャーが逆止ドッグと被動ドッグとの間で挟まれる定常駆動状態に切り換わるように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−92761号公報
【特許文献2】特開平7−329773号公報
【特許文献3】特開平11−48960号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように構成されるトロリーコンベヤにおいて、定停止位置で停止している搬送用走行体を発進させるとき、プッシャーと係合し得る元の高さ(又は姿勢)に切り換えられた被動ドッグをプッシャーが後押し駆動するのであるが、このとき、搬送用走行体に被搬送物が積載されていない、積載されている被搬送物が軽量物である、プッシャーの定常駆動速度が比較的高速に設定されている、などの理由によって、プッシャーが被動ドッグを介して搬送用走行体を蹴飛ばすような状況になって、その反動で搬送用走行体がプッシャーよりも先に進む先走り状態になる場合があった。このような先走り状態が生じると、先走り状態のままで搬送用走行体が前記広間隔領域から標準間隔領域に進入して走行することになる。
【0006】
上記のような先走り現象が長く続くと、前記定停止位置の下手側、具体的には前記広間隔領域に続く標準間隔領域の下手側に搬送用走行体の下り勾配経路部が連設されているようなレイアウトの場合、先走り状態の搬送用走行体がそのまま下り勾配経路部に進入して暴走する恐れがあった。又、上記のような搬送用走行体の先走り現象を防止するため、定停止位置の下手側に搬送用走行体に対するブレーキ装置を併設する解決手段も考えられたが、相応のコストアップを伴うだけでなく、ブレーキ装置を最も効果的な場所に取り付けることが出来ない場合もあり、仮に取り付けられたとしても、搬送用走行体が重量物を搬送するトロリーコンベヤでは、十分な効果が得られない。
【課題を解決するための手段】
【0007】
本発明は、上記のような従来の問題点を解消することのできるトロリーコンベヤを提案するものであって、請求項1に記載の本発明に係るトロリーコンベヤは、後述する実施例との関係を理解し易くするために、当該実施例の説明において使用した参照符号を括弧付きで付して示すと、走行経路中の定停止位置(P2)で停止待機している搬送用走行体(1)を、この搬送用走行体(1)の走行経路に沿って移動するプッシャー(11)により推進させるように構成されたトロリーコンベヤであって、前記搬送用走行体(1)は、ロードトロリー(3a,3b)によって支持された本体部(2)と、前記ロードトロリー(3a,3b)より前方に連結バー(4)を介して連結された被動トロリー(5)を備え、当該被動トロリー(5)には、前記プッシャー(11)が後押しする被動ドッグ(12)とこのプッシャー(11)より被動トロリー(5)が先行移動するのを阻止する逆止ドッグ(13)が設けられ、前記定停止位置(P2)は、前記プッシャー(11)が被動ドッグ(12)にのみ係合するように前記プッシャー(11)のガイドレール(8)と前記搬送用走行体(1)のガイドレール(6)との間の間隔が広げられた広間隔領域(H)に設けられると共に、この定停止位置(P2)には、前記被動ドッグ(12)を前記プッシャー(11)と係合しない高さに切り換える出退自在なストッパー(20)が配設され、前記広間隔領域(H)の下手側に、前記プッシャー(11)が被動ドッグ(12)と逆止ドッグ(13)との間に嵌合するように前記両ガイドレール(6,8)間の間隔が狭められた標準間隔領域(R)が設けられたトロリーコンベヤにおいて、前記定停止位置(P2)の上手側の前記搬送用走行体(1)のガイドレール(6)に上り勾配経路部(22)が設けられ、前記ストッパー(20)が解除されて前記プッシャー(11)による搬送用走行体(1)の推進が開始された後、前記ロードトロリー(3a)が前記上り勾配経路部(22)を走行している間に前記被動トロリー(5)が前記標準間隔領域(R)内に達する構成になっている。
【0008】
上記本発明を実施する場合、具体的には請求項2に記載のように、前記ストッパー(20)が解除されて前記プッシャー(11)による搬送用走行体(1)の推進が開始されると同時に、前記ロードトロリー(3a)が前記上り勾配経路部(22)に進入するように構成することが出来る。
【0009】
又、請求項3に記載のように、前記搬送用走行体(1)の走行経路には、前記標準間隔領域(R)における前記両ガイドレール(6,8)間の間隔よりも更に当該両ガイドレール(6,8)間の間隔が狭まった狭間隔領域(L)を前記標準間隔領域(R)の下手側に連続するように設け、この狭間隔領域(R)によって前記搬送用走行体(1)の下り勾配経路部(21)を構成することが出来る。
【0010】
更に、本発明のトロリーコンベヤは、請求項4に記載のように、搬送用走行体(1)の走行経路として、上手側駆動手段(7A)のプッシャー(11)で搬送用走行体(1)が推進される上手側走行経路(16A)と、下手側駆動手段(7B)のプッシャー(11)で搬送用走行体(1)が推進される下手側走行経路(16B)とが設けられている場合に、前記走行経路の定停止位置(P2)は、前記下手側走行経路(16B)の始端部に設け、前記上手側走行経路(16A)の終端で停止した搬送用走行体(1)を前記下手側走行経路(16B)の定停止位置(P2)に送り込むフィーダー(23)を併設することによって実施することが出来る。
【発明の効果】
【0011】
請求項1に記載の本発明の構成によれば、出退自在なストッパーにより搬送用走行体を停止させる定停止位置は、プッシャーが被動ドッグにのみ係合するように前記プッシャーのガイドレールと前記搬送用走行体のガイドレールとの間の間隔が広げられた広間隔領域に設定されるので、従来周知のように、前記ストッパーにより被動ドッグをプッシャーと係合しない高さに切り換えたとき、当該ストッパーで逆止ドッグを受け止めるように構成して、搬送用走行体を定位置に確実に停止させることが出来る。しかも、前記ストッパーを退出させて被動ドッグをプッシャーと係合し得る元の高さに戻し、当該被動ドッグをプッシャーにより後押しさせて、定停止位置で停止していた搬送用走行体を推進させるとき、仮に被動トロリー(被動ドッグ)がプッシャーで蹴飛ばされて搬送用走行体の先走り現象が発生したとしても、当該搬送用走行体の本体部を支持するロードトロリーが前記上り勾配経路部を走行するときには当該搬送用走行体の走行抵抗が非常に大きくなり、先走り状態にあった搬送用走行体に大きな制動力が作用して減速乃至は停止することになる。換言すれば、搬送用走行体の前記ロードトロリーが前記上り勾配経路部を走行する過程において、プッシャーが被動トロリーの被動ドッグを後押しする本来の状態に必ず戻される。この状態で搬送用走行体の前記被動トロリーが前記広間隔領域に続く標準間隔領域に進入し、プッシャーを被動ドッグと逆止ドッグとで挟む通常の駆動状態に切り換わる。
【0012】
上記のように本発明の構成によれば、定停止位置で停止していた搬送用走行体をプッシャーで駆動し始めるときに仮に搬送用走行体の先走り現象が生じたとしても、当該定停止位置より下手側の標準間隔領域に搬送用走行体の被動トロリーが進入する段階では必ず、プッシャーを被動ドッグと逆止ドッグとで挟む通常の駆動状態とすることが出来、搬送用走行体が先走り状態のままで前記標準間隔領域を通過する恐れがなくなる。従って、請求項3に記載のように、前記標準間隔領域に続いて前記搬送用走行体の下り勾配経路部が構成されている場合でも、搬送用走行体が先走り状態のままで前記下り勾配経路部に進入して、この下り勾配経路部を搬送用走行体が暴走落下する危険な事態を確実に回避出来る。しかも、搬送用走行体に対するブレーキ装置を追加する構成と比較して、極めて簡単且つ安価に実施することが出来、大重量物を搬送するトロリーコンベヤであっても、搬送用走行体の先走り状態での走行が或る領域を超えて長く続くことを確実に防止することが出来る。特に請求項2に記載の構成によれば、定停止位置からの搬送用走行体の駆動開始時に当該搬送用走行体が先走り状態になるのをほぼ完全に防止することが出来る。
【0013】
尚、上記のように本発明の構成は、特に請求項3に記載の構成において効果を発揮するものである。又、本発明が請求項4に記載の構成において実施される場合、上手側走行経路の終端で停止した搬送用走行体を前記下手側走行経路の定停止位置に送り込む過程において、被搬送物の荷重が作用していない被動トロリーのみを前記定停止位置の上手側の上り勾配経路部を通過させれば良いので、上手側走行経路の終端で停止した搬送用走行体を前記下手側走行経路の定停止位置に送り込むためのフィーダーに掛かる負荷が小さくて済み、当該フィーダーを含む設備の大幅なコストアップを免れる。
【図面の簡単な説明】
【0014】
【図1】図1は、走行経路中の搬送用走行体を示す一部切欠き側面図である。
【図2】図2は、図1の要部の拡大図である。
【図3】図3Aは、上手側走行経路部から下手側走行経路部への搬送用走行体の乗り移り箇所の構成を説明する側面図、図3Bは、同A図の平面図である。
【図4】図4Aは、上手側走行経路部の終端定停止位置で搬送用走行体が停止した状態を説明する側面図、図4Bは、同A図の要部の一部切欠き拡大図である。
【図5】図5Aは、下手側走行経路部の始端定停止位置で搬送用走行体が停止した状態を説明する側面図、図5Bは、同A図の要部の一部切欠き拡大図、図5Cは、同B図の状態から搬送用走行体が駆動開始される段階を説明する要部の一部切欠き拡大図である。
【図6】図6は、搬送用走行体の被動トロリーが広間隔領域内を走行する段階を説明する側面図である。
【図7】図7は、搬送用走行体の被動トロリーが標準間隔領域内を走行する段階を説明する側面図である。
【図8】図8は、搬送用走行体の被動トロリーが狭間隔領域内を走行する段階を説明する側面図である。
【図9】図9は、図8の要部の一部切欠き拡大図である。
【図10】図10は、別の実施例を説明する側面図である。
【発明を実施するための形態】
【0015】
図1及び図2において、1は搬送用走行体であって、被搬送物Wを支持するハンガー形式の本体部2の前後両端部を吊り下げる前後2つのロードトロリー3a,3bと、前側ロードトロリー3aに連結バー4を介して前方に連結された被動トロリー5を備えている。搬送用走行体1の走行経路は、前記ロードトロリー3a,3bと被動トロリー5を移動自在に支持するガイドレール6によって構成されている。7は搬送用走行体1の駆動手段であって、搬送用走行体1のガイドレール6に沿って当該ガイドレール6の上側に架設されたガイドレール8と、このガイドレール8に長さ方向適当間隔おきの位置を吊り下げるトロリー9を介して吊り下げられた駆動チエン10と、この駆動チエン10の長さ方向適当間隔おきの位置でトロリー9の近傍位置において駆動チエン10から下向きに突設されたプッシャー11とから構成されている。駆動チエン10は、従来周知のように、搬送用走行体1の走行経路(ガイドレール6)に沿った経路部分を含む循環経路を回動するもので、当該循環経路中の適当箇所に配設されたモーター駆動の歯輪によって所定速度で駆動される。
【0016】
搬送用走行体1の被動トロリー5には、昇降自在な被動ドッグ12と当該被動ドッグ12の後方に位置する逆止ドッグ13、及び被動トロリー5から前方に延出する上下揺動自在な被操作片14が設けられている。被動ドッグ12と被操作片14は、この被操作片14の上動に連動して被動ドッグ12が上動限位置から下降するように互いに連動連結されると共に、被操作片14に作用する重力によって、被動ドッグ12が上動限位置に付勢保持されるように構成されている。又、搬送用走行体1の後側ロードトロリー3bには、搬送用走行体1どうしが接近したときに、後ろ側の搬送用走行体1の被動トロリー5の被操作片14を上動させて、当該後ろ側の搬送用走行体1の被動トロリー5の被動ドッグ12を下降させるための操作片15が後方向きに突設されている。
【0017】
逆止ドッグ13は前方下方へ倒伏自在に軸支されたもので、重力により起立姿勢に付勢保持されている。この起立姿勢にある逆止ドッグ13は、上動限位置にある被動ドッグ12の上端よりも一段低くなるように構成されている。而して、搬送用走行体1を駆動手段7で推進させる駆動経路部分では、搬送用走行体1の後方から接近移動してくるプッシャー11が逆止ドッグ13を前方下方へ倒伏させて当該逆止ドッグ13の位置を通過した直後に上動限位置の被動ドッグ12の上端部に当接して後押しし、この被動ドッグ12を介して被動トロリー5、延いては搬送用走行体1を前進走行させるように、搬送台車1(トロリー3a,3b,5)のガイドレール6とプッシャー11(駆動チエン10)のガイドレール8との間の間隔が標準間隔に設定されている。プッシャー11が搬送用走行体1を駆動しているとき、逆止ドッグ13は起立姿勢に復帰してプッシャー11の後側に位置し、搬送用走行体1の被動トロリー5がプッシャー11より先行移動するのを、プッシャー11に当接して阻止する。
【0018】
図3に示すように、搬送用走行体1の走行経路には、上手側駆動手段7Aによって搬送用走行体1が走行駆動される上手側走行経路16Aと、下手側駆動手段7Bによって搬送用走行体1が走行駆動される下手側走行経路16Bとに区画されている。上手側駆動手段7Aと下手側駆動手段7Bは、図1及び図2に基づいて説明した駆動手段7と同一構造のものであり、上手側走行経路16Aと下手側走行経路16Bとの接続箇所には、上手側駆動手段7Aの駆動チエン10を上手側走行経路16Aから横側方に退出させる案内歯輪17と、下手側駆動手段7Bの駆動チエン10を下手側走行経路16B上へ導入する案内歯輪18が軸支されている。又、上手側走行経路16Aの終端部と下手側走行経路16Bの始端部には定停止位置P1,P2が設定され、これら各定停止位置P1,P2には、搬送用走行体1をこれら各定停止位置P1,P2で停止させるための出退自在なストッパー19,20が設けられている。
【0019】
上手側走行経路16Aの終端部と下手側走行経路16Bの始端部には、搬送用走行体1のガイドレール6とプッシャー11のガイドレール8との間の間隔が、図1及び図2に示した標準間隔よりも広くなった広間隔領域Hが設けられ、上手側走行経路16Aの終端部の定停止位置P1、即ち、ストッパー19は、この上手側走行経路16Aの終端部の広間隔領域Hの終端部に設けられ、下手側走行経路16Bの始端部の定停止位置P2、即ち、ストッパー20は、この下手側走行経路16Bの始端部の広間隔領域Hの始端近くの位置に設けられている。
【0020】
而して、図4及び図5に示すように、各ストッパー19,20は、搬送用走行体1の被動トロリー5における被動ドッグ12の移動経路に対して直角水平方向に、ソレノイドやシリンダーユニットなどのアクチュエーターによって出退移動自在なものであって、被動ドッグ12の移動経路内に進出した作用位置にあるとき、被動ドッグ12の前側傾斜面を利用して、当該被動ドッグ12を被動トロリー5の前進移動に伴って押し下げ、当該被動ドッグ12を後押ししていたプッシャー11から被動ドッグ12を下方に逃がした後、逆止ドッグ13の上端部に当接して被動トロリー5(搬送用走行体1)を受け止めるように構成されている。このストッパー19,20が被動トロリー5を定停止位置P1,P2で停止させているとき、当該ストッパー19,20の上面と起立姿勢にある逆止ドッグ13の上端とはほぼ同一レベルにあって、後続のプッシャー11は、これらストッパー19,20及び逆止ドッグ13の上側を移動通過出来るように構成されている。
【0021】
図3に示すように、搬送用走行体1の下手側走行経路16Bには、その始端部の定停止位置P2を含む広間隔領域Hの下手側に連続して標準間隔領域Rが設けられ、この標準間隔領域Rの下手側に連続して狭間隔領域Lが設けられている。標準間隔領域Rは、図1に基づいて説明したように、搬送用走行体1のガイドレール6とプッシャー11のガイドレール8との間の間隔が、プッシャー11が被動ドッグ12と逆止ドッグ13との間に嵌合し、逆止ドッグ13が機能する状態でプッシャー11が被動トロリー5(搬送用走行体1)を駆動することが出来る間隔となっている領域であり、狭間隔領域Lは、搬送用走行体1のガイドレール6とプッシャー11のガイドレール8との間の間隔が、標準間隔領域Rでの間隔よりも更に小さくなって、プッシャー11が被動ドッグ12と逆止ドッグ13との間に一層深く嵌合する領域である。而して、この下手側走行経路16Bにおける広間隔領域Hと標準間隔領域Rは、それぞれ必要最小限の長さに設定され、標準間隔領域Rに続く狭間隔領域Lは、そのほぼ全長において、搬送用走行体1の下り勾配経路部21を構成するものである。勿論、この狭間隔領域Lで構成される搬送用走行体1の下り勾配経路部21では、下手側駆動手段7Bのプッシャー11のガイドレール8も搬送用走行体1のガイドレール6に沿って下り勾配に形成されている。
【0022】
上記各広間隔領域H、標準間隔領域R、及び狭間隔領域Lは、搬送用走行体1のガイドレール6に対するプッシャー11のガイドレール8の高さを変えることによって構成されるものであり、広間隔領域Hと標準間隔領域Rとの間、及び標準間隔領域Rと狭間隔領域Lとの間には、プッシャー11のガイドレール8に上下方向の勾配部が形成されている。そして、下手側走行経路16Bの始端部に設けられた広間隔領域Hの上手側には、搬送用走行体1の上り勾配経路部22が、搬送用走行体1のガイドレール6の部分的な上り勾配部によって形成されている。更に、図3Aに示すように、上手側走行経路16Aの終端部の定停止位置P1から下手側走行経路16Bの始端部の定停止位置P2に搬送用走行体1を送り込むフィーダー23が併設されている。このフィーダー23は、例えばシリンダーユニット24によって押し引き駆動される逆止プッシャー25によって構成することが出来るもので、搬送用走行体1の適当な部分を後押しすることにより、当該搬送用走行体1を定停止位置P1から定停止位置P2に送り込むことが出来る。勿論、このフィーダー23は、シリンダーユニット24と逆止プッシャー25から構成されるものに限定されるものではなく、チエンやスクリュー駆動の逆止プッシャーによって構成することも出来る。
【0023】
以上の構成において、上手側走行経路16Aを上手側駆動手段7Aのプッシャー11によって駆動される搬送用走行体1が上手側走行経路16Aの終端部に到着する前に、定停止位置P1のストッパー19を作用位置まで進出させておく。而して、図1及び図2に示す状態で、上手側駆動手段7Aのプッシャー11によって駆動される搬送用走行体1が上手側走行経路16Aの終端部に到着すると、図4に示すように、プッシャー11で後押しされている被動トロリー5の被動ドッグ12がストッパー19によって押し下げられ、プッシャー11が被動ドッグ12から外れてそのまま通過し、ストッパー19は逆止ドッグ13に当接して被動トロリー5を受け止め、搬送用走行体1が定停止位置P1で自動停止することになる。このとき、フィーダー23の逆止プッシャー25は後退限位置にあって、この逆止プッシャー25を倒して通過した搬送用走行体1の後押し箇所が当該逆止プッシャー25の後ろ側に位置している。又、搬送用走行体1がストッパー19により定停止位置P1で停止待機している状態では、この定停止位置P1が広間隔領域H内にあるので、上手側駆動手段7Aのプッシャー11は、定停止位置P1で停止待機している搬送用走行体1の被動トロリー5の上を問題なく通過移動することが出来る。
【0024】
次に、下手側走行経路16Bの始端部の定停止位置P2のストッパー20を作用位置まで進出させてある状態において、定停止位置P1のストッパー19を退出させ、被動ドッグ12を元の上動限位置に復帰させた後、フィーダー23の逆止プッシャー25をシリンダーユニット24により進出限位置まで進出移動させることにより、定停止位置P1で停止していた搬送用走行体1を下手側走行経路16Bの始端部に向けて送り込む。このフィーダー23の逆止プッシャー25による搬送用走行体1の送込み作用によって、図5A及び図5Bに示すように、当該搬送用走行体1の被動トロリー5の被動ドッグ12が定停止位置P2のストッパー20で押し下げられると共に逆止ドッグ13が当該ストッパー20で受け止められて、搬送用走行体1が定停止位置P2で自動停止することになる。このとき、当該搬送用走行体1の前側ロードトロリー3aは、ガイドレール6の上り勾配経路部22の直前で停止している。換言すれば、このような状態となるように、搬送用走行体1の前側ロードトロリー3aと被動トロリー5との間の距離に対応して、ガイドレール6の上り勾配経路部22の位置が決められている。尚、この下手側走行経路16Bの始端部の定停止位置P2への搬送用走行体1の送込みは、下手側走行経路16Bに併設の下手側駆動手段7Bのプッシャー11が定停止位置P2に到着するまでに十分な時間的余裕が確保出来るタイミングで行われる。
【0025】
図5A及び図5Bに示すように、搬送用走行体1がストッパー20により定停止位置P2で停止待機している状態では、当該定停止位置P2が広間隔領域H内にあるので、下手側駆動手段7Bのプッシャー11は、定停止位置P2で停止待機している搬送用走行体1の被動トロリー5の上を問題なく通過移動することが出来る。そして定停止位置P2で停止待機している搬送用走行体1を走行駆動させるプッシャー11が定停止位置P2に到着する前に、定停止位置P2のストッパー20を退出させて被動ドッグ12を元の上動限位置まで復帰させる。この結果、図5Cに示すように、定停止位置P2に向かって移動してくる下手側駆動手段7Bのプッシャー11が被動トロリー5の被動ドッグ12に当接して後押しを開始し、定停止位置P2で停止していた搬送用走行体1の駆動が開始される。
【0026】
定停止位置P2で停止していた搬送用走行体1の駆動が開始されて、図6に示すように、被動トロリー5が広間隔領域H内を走行し始めるのに伴って、当該搬送用走行体1の前側ロードトロリー3aがガイドレール6の上り勾配経路部22を登り始める。換言すれば、搬送用走行体1には、被搬送物Wの荷重を負担している前側ロードトロリー3aがガイドレール6の上り勾配経路部22を昇ることに起因する大きな走行抵抗が作用するので、停止していた搬送用走行体1の被動ドッグ12にプッシャー11が勢い良く衝突しても、当該搬送用走行体1が蹴り出されるような状態にはならず、当該搬送用走行体1は確実にプッシャー11と一体の状態で走行を開始することになる。
【0027】
搬送用走行体1が下手側走行経路16Bを走行するのに伴って、下手側駆動手段7Bのプッシャー11で後押し駆動されている被動トロリー5は、定停止位置P2のあった広間隔領域Hから標準間隔領域R内に移行し、図7に示すように、当該プッシャー11が被動トロリー5の被動ドッグ12と逆止ドッグ13との間に嵌合する定常駆動状態において搬送用走行体1が走行駆動される。そして続いて搬送用走行体1の被動トロリー5が狭間隔領域Lに進入し、図8及び図9に示すように、プッシャー11が被動トロリー5の被動ドッグ12と逆止ドッグ13との間に更に深く嵌合する状態で搬送用走行体1の走行駆動が継続され、当該狭間隔領域Lによって構成された下り勾配経路部21を搬送用走行体1がプッシャー11の移動速度で安全確実に走行駆動されることになる。
【0028】
尚、図10に示すように、搬送用走行体1の前側ロードトロリー3aと被動トロリー5との間の距離が長い場合、被動トロリー5が広間隔領域H内から標準間隔領域Rに移って当該標準間隔領域R内を搬送用走行体1の被動トロリー5が走行するときに、当該搬送用走行体1の前側ロードトロリー3aが上り勾配経路部22を昇るように構成することも出来る。この場合、広間隔領域H内の定停止位置P2において停止している搬送用走行体1の被動トロリー5をプッシャー11が駆動開始するとき、前側ロードトロリー3aは上り勾配経路部22の上手側に離れて位置しているので、プッシャー11が被動トロリー5の被動ドッグ12を勢い良く蹴り出す恐れはあるが、仮にこのような状況になっても、被動トロリー5が広間隔領域Hから標準間隔領域R内に移った段階で、前側ロードトロリー3aが上り勾配経路部22を昇ることによる走行抵抗を搬送用走行体1が受けて減速乃至は停止し、後追い状態のプッシャー11が標準間隔領域R内で被動トロリー5に追いつき、当該プッシャー11は逆止ドッグ13を前方に倒して通過した後、被動ドッグ12に当接して確実に定常駆動状態になり、この定常駆動状態で被動トロリー5が標準間隔領域Rからこれに続く狭間隔領域L内に進入することになる。従って、プッシャー11が被動ドッグ12と逆止ドッグ13との間に嵌合しないまま惰性で走行する搬送用走行体1が狭間隔領域L内に進入し、下り勾配経路部21を暴走落下する恐れはない。
【0029】
尚、搬送用走行体1の構成は上記実施例のものに限定されない。例えば、被搬送物Wが長尺の場合、後側ロードトロリー3bに連結バーを介して後方に連結された従動トロリーが追加され、この縦動トロリーに前記後側ロードトロリー3bに設けられた操作片15が設けられたものであっても良い。又、搬送用走行体1がガイドレール6から吊り下げられた形式のものを示したが、ガイドレール上を走行する台車形式の搬送用走行体であっても良い。この場合、搬送用走行体の各トロリーや駆動手段7,7A,7Bは、上記実施例とは上下逆の態様になる。更に、プッシャー11が駆動チエン10に取り付けられた駆動手段7,7A,7Bを例示したが、ワイヤーロープにプッシャーが設けられた駆動手段であっても良い。
【産業上の利用可能性】
【0030】
本発明のトロリーコンベヤは、特に自動車車体を吊り下げ搬送するトロリーコンベヤに好適なものであって、搬送用走行体の定停止位置の下手側に下り勾配経路部が設けられているようなレイアウトにおいて効果的に活用出来るものである。
【符号の説明】
【0031】
1 搬送用走行体
2 本体部
3a,3b ロードトロリー
4 連結バー
5 被動トロリー
6 搬送用走行体のガイドレール
7 駆動手段
7A 上手側駆動手段
7B 下手側駆動手段
8 プッシャーのガイドレール
10 駆動チエン
11 プッシャー
12 被動ドッグ
13 逆止ドッグ
14 被操作片
15 操作片
16A 上手側走行経路
16B 下手側走行経路
17,18 案内歯輪
19,20 ストッパー
21 下り勾配経路部
22 上り勾配経路部
23 フィーダー
24 シリンダーユニット
25 逆止プッシャー
P1 上手側走行経路の定停止位置
P2 下手側走行経路の定停止位置
H 広間隔領域
R 標準間隔領域
L 狭間隔領域
【特許請求の範囲】
【請求項1】
走行経路中の定停止位置で停止待機している搬送用走行体を、この搬送用走行体の走行経路に沿って移動するプッシャーにより推進させるように構成されたトロリーコンベヤであって、前記搬送用走行体は、ロードトロリーによって支持された本体部と、前記ロードトロリーより前方に連結バーを介して連結された被動トロリーを備え、当該被動トロリーには、前記プッシャーが後押しする被動ドッグとこのプッシャーより被動トロリーが先行移動するのを阻止する逆止ドッグが設けられ、前記定停止位置は、前記プッシャーが被動ドッグにのみ係合するように前記プッシャーのガイドレールと前記搬送用走行体のガイドレールとの間の間隔が広げられた広間隔領域に設けられると共に、この定停止位置には、前記被動ドッグを前記プッシャーと係合しない高さに切り換える出退自在なストッパーが配設され、前記広間隔領域の下手側に、前記プッシャーが被動ドッグと逆止ドッグとの間に嵌合するように前記両ガイドレール間の間隔が狭められた標準間隔領域が設けられたトロリーコンベヤにおいて、前記定停止位置の上手側の前記搬送用走行体のガイドレールに上り勾配経路部が設けられ、前記ストッパーが解除されて前記プッシャーによる搬送用走行体の推進が開始された後、前記ロードトロリーが前記上り勾配経路部を走行している間に前記被動トロリーが前記標準間隔領域内に達するように構成された、トロリーコンベヤ。
【請求項2】
前記ストッパーが解除されて前記プッシャーによる搬送用走行体の推進が開始されると同時に、前記ロードトロリーが前記上り勾配経路部に進入するように構成されている、請求項1に記載のトロリーコンベヤ。
【請求項3】
前記搬送用走行体の走行経路には、前記標準間隔領域における前記両ガイドレール間の間隔よりも更に当該両ガイドレール間の間隔が狭まった狭間隔領域が前記標準間隔領域の下手側に連続するように設けられ、この狭間隔領域によって前記搬送用走行体の下り勾配経路部が構成されている、請求項1又は2に記載のトロリーコンベヤ。
【請求項4】
搬送用走行体の走行経路として、上手側駆動手段のプッシャーで搬送用走行体が推進される上手側走行経路と、下手側駆動手段のプッシャーで搬送用走行体が推進される下手側走行経路とが設けられ、前記走行経路の定停止位置は、前記下手側走行経路の始端部に設けられ、前記上手側走行経路の終端で停止した搬送用走行体を前記下手側走行経路の定停止位置に送り込むフィーダーが併設されている、請求項1〜4の何れか1項に記載のトロリーコンベヤ。
【請求項1】
走行経路中の定停止位置で停止待機している搬送用走行体を、この搬送用走行体の走行経路に沿って移動するプッシャーにより推進させるように構成されたトロリーコンベヤであって、前記搬送用走行体は、ロードトロリーによって支持された本体部と、前記ロードトロリーより前方に連結バーを介して連結された被動トロリーを備え、当該被動トロリーには、前記プッシャーが後押しする被動ドッグとこのプッシャーより被動トロリーが先行移動するのを阻止する逆止ドッグが設けられ、前記定停止位置は、前記プッシャーが被動ドッグにのみ係合するように前記プッシャーのガイドレールと前記搬送用走行体のガイドレールとの間の間隔が広げられた広間隔領域に設けられると共に、この定停止位置には、前記被動ドッグを前記プッシャーと係合しない高さに切り換える出退自在なストッパーが配設され、前記広間隔領域の下手側に、前記プッシャーが被動ドッグと逆止ドッグとの間に嵌合するように前記両ガイドレール間の間隔が狭められた標準間隔領域が設けられたトロリーコンベヤにおいて、前記定停止位置の上手側の前記搬送用走行体のガイドレールに上り勾配経路部が設けられ、前記ストッパーが解除されて前記プッシャーによる搬送用走行体の推進が開始された後、前記ロードトロリーが前記上り勾配経路部を走行している間に前記被動トロリーが前記標準間隔領域内に達するように構成された、トロリーコンベヤ。
【請求項2】
前記ストッパーが解除されて前記プッシャーによる搬送用走行体の推進が開始されると同時に、前記ロードトロリーが前記上り勾配経路部に進入するように構成されている、請求項1に記載のトロリーコンベヤ。
【請求項3】
前記搬送用走行体の走行経路には、前記標準間隔領域における前記両ガイドレール間の間隔よりも更に当該両ガイドレール間の間隔が狭まった狭間隔領域が前記標準間隔領域の下手側に連続するように設けられ、この狭間隔領域によって前記搬送用走行体の下り勾配経路部が構成されている、請求項1又は2に記載のトロリーコンベヤ。
【請求項4】
搬送用走行体の走行経路として、上手側駆動手段のプッシャーで搬送用走行体が推進される上手側走行経路と、下手側駆動手段のプッシャーで搬送用走行体が推進される下手側走行経路とが設けられ、前記走行経路の定停止位置は、前記下手側走行経路の始端部に設けられ、前記上手側走行経路の終端で停止した搬送用走行体を前記下手側走行経路の定停止位置に送り込むフィーダーが併設されている、請求項1〜4の何れか1項に記載のトロリーコンベヤ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−39857(P2013−39857A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−176452(P2011−176452)
【出願日】平成23年8月12日(2011.8.12)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月12日(2011.8.12)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]