
トンネル内流速検出装置、および、トンネル内車両検出装置

【課題】トンネル内に設けた複数の圧力検出手段により、トンネル内の流速を検出する際に、トンネル内部に生ずる2次流れの影響を受けにくい、トンネル内部の流速測定手段を提供する。
【解決手段】トンネル内に設けた複数の圧力検出手段と、圧力検出手段の出力の位相差から、トンネルを通過する自動車の速度を演算する第一の演算手段と、第一の演算手段で演算された前記自動車の速度と、圧力検出手段の出力から、車両の大きさを演算する第二の演算手段と、第一,第二の演算手段で演算された前記自動車の速度,車両の大きさ情報と、圧力検出手段の出力から、トンネル内の平均流速を演算する第三の演算手段を備える。
【解決手段】トンネル内に設けた複数の圧力検出手段と、圧力検出手段の出力の位相差から、トンネルを通過する自動車の速度を演算する第一の演算手段と、第一の演算手段で演算された前記自動車の速度と、圧力検出手段の出力から、車両の大きさを演算する第二の演算手段と、第一,第二の演算手段で演算された前記自動車の速度,車両の大きさ情報と、圧力検出手段の出力から、トンネル内の平均流速を演算する第三の演算手段を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路トンネル内の風速を検出するトンネル内流速検出装置、或いは、トンネル内の車両の大きさ,速度を検出するトンネル内車両検出装置に関する。
【背景技術】
【0002】
一定以上の長さを有する道路トンネルでは、トンネル内部の粉塵やCO2の濃度を所定の値以下に抑えた環境を維持するために、天井に設置されたジェットファン等を用いた換気制御が行われている(特許文献1)。
【0003】
この換気制御について様々な手法が提案されているが、基本的にはトンネル壁面付近に設置された流速測定手段により、トンネル内の流速値を検出し、制御演算を経てジェットファンの出力を調整する手法が一般的である。流速測定手段としては、超音波流速計を用いる方法の他、風圧検出手段を用いる方法が知られている(特許文献2)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−104500号公報
【特許文献2】特開平6−258453号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
トンネル内平均流速情報は、換気制御を行う上で不可欠であり、トンネル壁面に設置した流速計で流速を測定し、それをトンネル内の平均流速として換気制御を行ってきた。
【0006】
しかし、近年、特に都市部において、環境配慮やコスト削減の観点から様々な形態のトンネルが作られるようになり、この結果、トンネル内部に逆流域等の2次流れが生じ、流速測定精度の悪化が懸念されている。また、従来の比較的単純な形状のトンネルであっても、自動車の通過により生じた2次流れの影響で測定精度が悪化する問題があり、換気制御の高度化に伴い、流速計測精度悪化の問題が顕在化してきている。
【0007】
本発明の目的は、上記従来技術の問題を解消し、トンネル形状や自動車の通過によって生ずる2次流れの影響を受けにくいトンネル内流速検出装置を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、トンネルの壁面の第一の位置に設けた第一の圧力検出手段と、トンネルの壁面の第二の位置に設けた第二の圧力検出手段と、前記第一の圧力検出手段の出力と前記第二の圧力検出手段の出力の位相差から、前記トンネルを通過する自動車の速度を演算する第一の演算手段と、該第一の演算手段で演算された前記自動車の速度と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、車両の大小を演算する第二の演算手段と、該第一,第二の演算手段で演算された前記自動車の速度,車両の大小情報と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、前記トンネル内の平均流速を演算する第三の演算手段を備えたトンネル内流速検出装置を構成する。
【発明の効果】
【0009】
本発明によれば、圧力検出手段により得られたトンネル内の静圧値より平均流速を得るため、壁面近傍の局所的な逆流等2次流れの影響を受けにくく、トンネル内の流速を、精度良く検出することができる。
【図面の簡単な説明】
【0010】
【図1】実施例1の流速検出装置のブロック図。
【図2】実施例1における圧力検出装置により得られる圧力の時系列波形。
【図3】実施例1における圧力検出装置により得られる圧力の時系列波形。
【図4】流速検出手順を示したフローチャート。
【図5】実施例2における圧力検出装置の配置を示す図。
【図6】車両の投影断面積と車両の全長の関係を示す図。
【発明を実施するための形態】
【0011】
本発明は、道路トンネル内の平均流速値を直接測定せずに、平均静圧の時系列変化から間接的に評価し、局所的な逆流等の2次流れの影響による測定誤差が小さい、道路トンネル内流速検出装置を実現するものであり、その詳細を、図1〜図5を用いて説明する。
【実施例1】
【0012】
図1〜図4を用いて、実施例1の流速検出装置を説明する。
【0013】
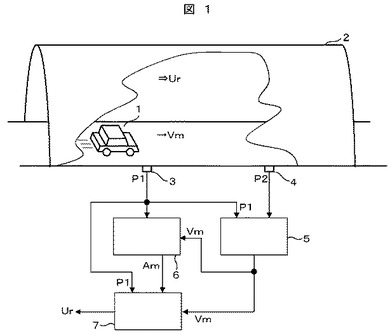
図1は、本実施例の流速検出装置のブロック図である。図1において、1は車両、2は車両1が左から右に向かって走行する1車線の道路トンネルである。3,4は間隔Δxで設置された第一,第二の圧力検出装置で、それぞれの位置における静圧P1,P2を出力する。これらの圧力検出装置としては、例えば、半導体圧力センサが用いられる。車両近傍の静圧を正確に検出するため、各圧力検出装置は、車線中央の路面に埋設設置するのが望ましいが、側壁や天井に設置しても良い。圧力検出装置の間隔が広い程、車両の速度の検出精度は向上するが、異なる車両を同一車両として検出する恐れがある。小型車,大型車の全長や車間距離を考慮すると、圧力検出装置の間隔を数十m程度とするのが望ましい。
【0014】
5は第一の演算装置であり、第一の圧力検出装置3と第二の圧力検出装置4から得られた圧力情報(静圧P1,P2)から、車両1の速度Vmを算出する。6は第二の演算装置であり、第一の圧力検出装置3から得られた圧力情報(静圧P1)と、第一の圧力検出装置3で求めた車両1の速度Vmから、車両の投影面積Am、つまり、車両の大きさを算出する。7は第三の演算装置であり、第一の圧力検出装置3から得られた圧力情報(静圧P1)と、第一の演算装置5で求めた車両1の速度Vm、第二の演算装置6で求めた車両1の投影面積Amから、トンネル内の風速Urを算出する。
【0015】
なお、図1では、第二の演算装置6,第三の演算装置7が、第一の圧力検出装置3から得られた圧力情報(静圧P1)を用いることとしたが、これに代え、第二の圧力検出装置4から得られた圧力情報(静圧P2)を用いることとしても良い。
【0016】
次に、図2から図4により、トンネル内流速測定動作を説明する。
【0017】
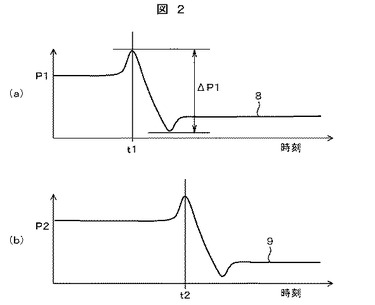
図2(a)は、第一の圧力検出装置3により得られた圧力の時系列波形8であり、図2(b)は、第二の圧力検出装置4により得られた圧力の時系列波形9である。両図からも分かるように、一般に、車両1の走行速度Vmは、トンネル内の風速Urよりも大きいため、車両1の前方では車両進行方向に向かい空気を押しつける力が作用し、進行方向側の圧力が増大し、逆に、車両1の後方では負圧となる。
【0018】
ここで、車両1の近傍に着目すると、車両前縁付近で圧力が最大となり、車両後縁付近で圧力が最小となるため、固定された第一の圧力検出装置3の出力は、最初はほぼ一定値を示しているが、ある時点から急激に上昇し、車両前縁通過時に最大となる(時刻t1)。その後急激に減少し、車両前縁通過時に最小となり、更に、若干回復した後、一定値を示す。第二の圧力検出装置4の出力も同様な傾向を示し、時刻t2で最大となる。
【0019】
第一の圧力検出装置3と第二の圧力検出装置4の間隔をΔxとすると、車両の速度Vmは(式1)により算出できる。
【0020】
【数1】

【0021】
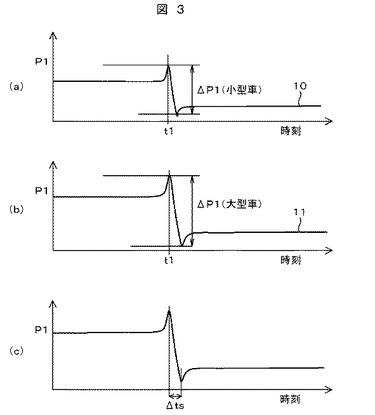
図3は、第一の圧力検出装置3により得られる圧力の時系列波形で、図3(a)に示す10は普通車などの小型車通過時、図3(b)に示す11はトラックなどの大型車通過時の圧力を示している。ここに示されるように、小型車通過時の波形10では、最大値と最小値の圧力差が相対的に小さく、大型車通過時の波形11では、最大値と最小値の圧力差が相対的に大きい。従って、第一の圧力検出装置3で観測された圧力の最大値と最小値の差分から車両の大きさを概算することができる。
【0022】
また、図3(c)に示すΔtsは、圧力が最大値から最小値まで変化に要する時間であり、車両の前縁通過から後縁通過までの時間に略等しい。そして、(式1)で求めた車両速度VmとΔtsを乗算することで車両の全長Lmが得られる。更に、車両の全長Lmと、車両投影面積Amは概ね比例関係が成立するため、(式2)を用いて車両投影面積Amを求めることができる。
【0023】
【数2】
【0024】
なお、Cmは統計的に得られる定数であり、本実施例では、図6に示す投影断面積と車両の全長の関係から、Cmを0.7とした。
【0025】
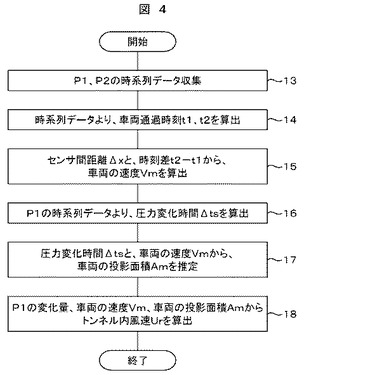
図4は、本実施例の道路トンネル内流速検出装置で用いられる、流速検出手順を示したフローチャートである。以下、手順13〜18の詳細を順に説明する。
【0026】
まず、第一の演算装置5を用いる手順13〜15を説明する。手順13では、第一の圧力検出装置3から出力される静圧P1、および、第二の圧力検出装置4から出力される静圧P2を時系列に収集し、図2に例示される関係を得る。手順14では、観測された静圧P1,P2から、各々の値が最大となる時刻t1,t2を算出する。この時刻t1,t2は車両通過時刻に相当する。手順15では、(式1)で説明したように、センサ間距離Δxを時刻差(t2−t1)で除算し、車両速度Vmを算出する。
【0027】
次に、第二の演算装置6を用いる手順16,手順17を説明する。手順16では、静圧P1の時系列データより、図3(c)に例示されるように、圧力変化時間Δtsを算出する。手順17では、(式2)で説明したように、定数Cm,圧力変化時間Δts,車両速度Vmを乗算し、車両の投影面積Amを推定する。
【0028】
最後に、第三の演算装置7を用いる手順18において、静圧P1の変化量ΔP1,車両の投影面積Am,トンネル断面積Ar,空気の密度ρ,車両の速度Vmからトンネル内の風速Urを(式3)に従い算出する。
【0029】
【数3】
【0030】
以上の手順13〜18に従い、トンネル内の平均流速Urが求められる。なお、(式3)において、Ur>0の場合、車両に対し追い風であり、Ur<0場合は逆風となる。
【0031】
また、各圧力検出装置で検出される静圧が一定時間以上変動しない場合、すなわち、車両の通行が無い場合は、管摩擦係数λ,第一,第二の圧力検出装置の間隔Δx,代表長さ(直径)Dより、(式4)に従い流速Urを計算する。この代表長さDは、等価水力直径とも呼ばれ、トンネル断面積を断面の周囲長で割った値を4倍したものである。
【0032】
【数4】
【0033】
なお、(式4)において、P2−P1が正の場合、図1では、左から右に風が流れており、負の場合、右から左に風が流れていることが分かる。
【実施例2】
【0034】
次に、対面交通の場合にも適用可能な、車両検出装置の実施例である実施例2を説明する。なお、実施例1の流速検出装置と共通する部分については説明を省略することとする。
【0035】
実施例1で説明した流速検出装置では、1車線のトンネルに、2台1組の圧力検出装置を設置して、車両の速度Vm,投影面積Am,トンネル内風速Urを算出しているが、トンネル内に複数車線がある場合、異なる車線を走行する各々の車両の車両情報(速度,投影面積)を検出することはできない。以下では、それぞれの車線に2台1組の圧力検出装置を備えることで、トンネル内風速Urに加え、車線毎の車両情報を検出できる車両検出装置を紹介する。
【0036】
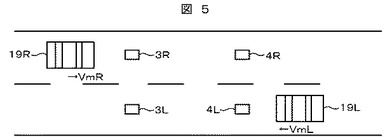
図5は、トンネル天井側から下方の道路を眺めた俯瞰図であり、各車線に2台1組の圧力検出装置を設置している。図5に示すように、上側車線では、右に向かう車両1Rが速度VmRで走行しており、下側車線では、左に向かう車両1Lが速度VmLで走行している。上側車線には、第一の圧力検出装置3R,第二の圧力検出装置4Rが設けられており、下側車線には、第三の圧力検出装置3L,第四の圧力検出装置4Lが設けられている。
【0037】
第一の圧力検出装置3Rと第二の圧力検出装置4Rで観測される静圧から、実施例1で説明した流速検出手段と同様の方法により、車両1Rの速度と投影面積を求めることができる。また、第三の圧力検出装置3Lと第四の圧力検出装置4Lで観測される静圧から、実施例1で説明した流速検出手段と同様の方法により、車両1Lの速度と投影面積を求めることができる。これから分かるように、各々の車線に2台1組の圧力検出装置を設けることで、任意の車線数のトンネルにおいても、各車線を走行する車両の車両情報を個別に検出することができる。
【0038】
いずれかの車両の速度が得られれば、実施例1の手順でトンネル内の平均流速を算出することが可能である。
【0039】
図示を省略するが、本実施例では、第一の圧力検出装置3Rと第二の圧力検出装置4Rからの信号を用いる上側車線用の流速検出装置と、第三の圧力検出装置3Lと第四の圧力検出装置4Lからの信号を用いる下側車線用の流速検出装置を独立して設けて車両検出装置を構成した。
【0040】
なお、図5では、上側車線と下側車線が対向車線である例を説明したが、両車線を同じ方向に車両が走行するトンネルにおいても、圧力検出装置を上記と同様に配置することで、各車線の車両情報を検出することができる。
【符号の説明】
【0041】
1,1R,1L 車両
2 トンネル
3,3R 第一の圧力検出装置
4,4R 第二の圧力検出装置
3L 第三の圧力検出装置
4L 第四の圧力検出装置
5 車両の速度を計算する第一の演算装置
6 車両の投影面積を計算する第二の演算装置
7 トンネル内の平均流速を計算する第三の演算装置
8 第一の圧力検出装置により得られた圧力の時系列波形
9 第二の圧力検出装置により得られた圧力の時系列波形
10 第一の圧力検出装置により得られた圧力の時系列波形(小型車通過時)
11 第一の圧力検出装置により得られた圧力の時系列波形(大型車通過時)
【技術分野】
【0001】
本発明は、道路トンネル内の風速を検出するトンネル内流速検出装置、或いは、トンネル内の車両の大きさ,速度を検出するトンネル内車両検出装置に関する。
【背景技術】
【0002】
一定以上の長さを有する道路トンネルでは、トンネル内部の粉塵やCO2の濃度を所定の値以下に抑えた環境を維持するために、天井に設置されたジェットファン等を用いた換気制御が行われている(特許文献1)。
【0003】
この換気制御について様々な手法が提案されているが、基本的にはトンネル壁面付近に設置された流速測定手段により、トンネル内の流速値を検出し、制御演算を経てジェットファンの出力を調整する手法が一般的である。流速測定手段としては、超音波流速計を用いる方法の他、風圧検出手段を用いる方法が知られている(特許文献2)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−104500号公報
【特許文献2】特開平6−258453号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
トンネル内平均流速情報は、換気制御を行う上で不可欠であり、トンネル壁面に設置した流速計で流速を測定し、それをトンネル内の平均流速として換気制御を行ってきた。
【0006】
しかし、近年、特に都市部において、環境配慮やコスト削減の観点から様々な形態のトンネルが作られるようになり、この結果、トンネル内部に逆流域等の2次流れが生じ、流速測定精度の悪化が懸念されている。また、従来の比較的単純な形状のトンネルであっても、自動車の通過により生じた2次流れの影響で測定精度が悪化する問題があり、換気制御の高度化に伴い、流速計測精度悪化の問題が顕在化してきている。
【0007】
本発明の目的は、上記従来技術の問題を解消し、トンネル形状や自動車の通過によって生ずる2次流れの影響を受けにくいトンネル内流速検出装置を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、トンネルの壁面の第一の位置に設けた第一の圧力検出手段と、トンネルの壁面の第二の位置に設けた第二の圧力検出手段と、前記第一の圧力検出手段の出力と前記第二の圧力検出手段の出力の位相差から、前記トンネルを通過する自動車の速度を演算する第一の演算手段と、該第一の演算手段で演算された前記自動車の速度と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、車両の大小を演算する第二の演算手段と、該第一,第二の演算手段で演算された前記自動車の速度,車両の大小情報と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、前記トンネル内の平均流速を演算する第三の演算手段を備えたトンネル内流速検出装置を構成する。
【発明の効果】
【0009】
本発明によれば、圧力検出手段により得られたトンネル内の静圧値より平均流速を得るため、壁面近傍の局所的な逆流等2次流れの影響を受けにくく、トンネル内の流速を、精度良く検出することができる。
【図面の簡単な説明】
【0010】
【図1】実施例1の流速検出装置のブロック図。
【図2】実施例1における圧力検出装置により得られる圧力の時系列波形。
【図3】実施例1における圧力検出装置により得られる圧力の時系列波形。
【図4】流速検出手順を示したフローチャート。
【図5】実施例2における圧力検出装置の配置を示す図。
【図6】車両の投影断面積と車両の全長の関係を示す図。
【発明を実施するための形態】
【0011】
本発明は、道路トンネル内の平均流速値を直接測定せずに、平均静圧の時系列変化から間接的に評価し、局所的な逆流等の2次流れの影響による測定誤差が小さい、道路トンネル内流速検出装置を実現するものであり、その詳細を、図1〜図5を用いて説明する。
【実施例1】
【0012】
図1〜図4を用いて、実施例1の流速検出装置を説明する。
【0013】
図1は、本実施例の流速検出装置のブロック図である。図1において、1は車両、2は車両1が左から右に向かって走行する1車線の道路トンネルである。3,4は間隔Δxで設置された第一,第二の圧力検出装置で、それぞれの位置における静圧P1,P2を出力する。これらの圧力検出装置としては、例えば、半導体圧力センサが用いられる。車両近傍の静圧を正確に検出するため、各圧力検出装置は、車線中央の路面に埋設設置するのが望ましいが、側壁や天井に設置しても良い。圧力検出装置の間隔が広い程、車両の速度の検出精度は向上するが、異なる車両を同一車両として検出する恐れがある。小型車,大型車の全長や車間距離を考慮すると、圧力検出装置の間隔を数十m程度とするのが望ましい。
【0014】
5は第一の演算装置であり、第一の圧力検出装置3と第二の圧力検出装置4から得られた圧力情報(静圧P1,P2)から、車両1の速度Vmを算出する。6は第二の演算装置であり、第一の圧力検出装置3から得られた圧力情報(静圧P1)と、第一の圧力検出装置3で求めた車両1の速度Vmから、車両の投影面積Am、つまり、車両の大きさを算出する。7は第三の演算装置であり、第一の圧力検出装置3から得られた圧力情報(静圧P1)と、第一の演算装置5で求めた車両1の速度Vm、第二の演算装置6で求めた車両1の投影面積Amから、トンネル内の風速Urを算出する。
【0015】
なお、図1では、第二の演算装置6,第三の演算装置7が、第一の圧力検出装置3から得られた圧力情報(静圧P1)を用いることとしたが、これに代え、第二の圧力検出装置4から得られた圧力情報(静圧P2)を用いることとしても良い。
【0016】
次に、図2から図4により、トンネル内流速測定動作を説明する。
【0017】
図2(a)は、第一の圧力検出装置3により得られた圧力の時系列波形8であり、図2(b)は、第二の圧力検出装置4により得られた圧力の時系列波形9である。両図からも分かるように、一般に、車両1の走行速度Vmは、トンネル内の風速Urよりも大きいため、車両1の前方では車両進行方向に向かい空気を押しつける力が作用し、進行方向側の圧力が増大し、逆に、車両1の後方では負圧となる。
【0018】
ここで、車両1の近傍に着目すると、車両前縁付近で圧力が最大となり、車両後縁付近で圧力が最小となるため、固定された第一の圧力検出装置3の出力は、最初はほぼ一定値を示しているが、ある時点から急激に上昇し、車両前縁通過時に最大となる(時刻t1)。その後急激に減少し、車両前縁通過時に最小となり、更に、若干回復した後、一定値を示す。第二の圧力検出装置4の出力も同様な傾向を示し、時刻t2で最大となる。
【0019】
第一の圧力検出装置3と第二の圧力検出装置4の間隔をΔxとすると、車両の速度Vmは(式1)により算出できる。
【0020】
【数1】
【0021】
図3は、第一の圧力検出装置3により得られる圧力の時系列波形で、図3(a)に示す10は普通車などの小型車通過時、図3(b)に示す11はトラックなどの大型車通過時の圧力を示している。ここに示されるように、小型車通過時の波形10では、最大値と最小値の圧力差が相対的に小さく、大型車通過時の波形11では、最大値と最小値の圧力差が相対的に大きい。従って、第一の圧力検出装置3で観測された圧力の最大値と最小値の差分から車両の大きさを概算することができる。
【0022】
また、図3(c)に示すΔtsは、圧力が最大値から最小値まで変化に要する時間であり、車両の前縁通過から後縁通過までの時間に略等しい。そして、(式1)で求めた車両速度VmとΔtsを乗算することで車両の全長Lmが得られる。更に、車両の全長Lmと、車両投影面積Amは概ね比例関係が成立するため、(式2)を用いて車両投影面積Amを求めることができる。
【0023】
【数2】
【0024】
なお、Cmは統計的に得られる定数であり、本実施例では、図6に示す投影断面積と車両の全長の関係から、Cmを0.7とした。
【0025】
図4は、本実施例の道路トンネル内流速検出装置で用いられる、流速検出手順を示したフローチャートである。以下、手順13〜18の詳細を順に説明する。
【0026】
まず、第一の演算装置5を用いる手順13〜15を説明する。手順13では、第一の圧力検出装置3から出力される静圧P1、および、第二の圧力検出装置4から出力される静圧P2を時系列に収集し、図2に例示される関係を得る。手順14では、観測された静圧P1,P2から、各々の値が最大となる時刻t1,t2を算出する。この時刻t1,t2は車両通過時刻に相当する。手順15では、(式1)で説明したように、センサ間距離Δxを時刻差(t2−t1)で除算し、車両速度Vmを算出する。
【0027】
次に、第二の演算装置6を用いる手順16,手順17を説明する。手順16では、静圧P1の時系列データより、図3(c)に例示されるように、圧力変化時間Δtsを算出する。手順17では、(式2)で説明したように、定数Cm,圧力変化時間Δts,車両速度Vmを乗算し、車両の投影面積Amを推定する。
【0028】
最後に、第三の演算装置7を用いる手順18において、静圧P1の変化量ΔP1,車両の投影面積Am,トンネル断面積Ar,空気の密度ρ,車両の速度Vmからトンネル内の風速Urを(式3)に従い算出する。
【0029】
【数3】
【0030】
以上の手順13〜18に従い、トンネル内の平均流速Urが求められる。なお、(式3)において、Ur>0の場合、車両に対し追い風であり、Ur<0場合は逆風となる。
【0031】
また、各圧力検出装置で検出される静圧が一定時間以上変動しない場合、すなわち、車両の通行が無い場合は、管摩擦係数λ,第一,第二の圧力検出装置の間隔Δx,代表長さ(直径)Dより、(式4)に従い流速Urを計算する。この代表長さDは、等価水力直径とも呼ばれ、トンネル断面積を断面の周囲長で割った値を4倍したものである。
【0032】
【数4】
【0033】
なお、(式4)において、P2−P1が正の場合、図1では、左から右に風が流れており、負の場合、右から左に風が流れていることが分かる。
【実施例2】
【0034】
次に、対面交通の場合にも適用可能な、車両検出装置の実施例である実施例2を説明する。なお、実施例1の流速検出装置と共通する部分については説明を省略することとする。
【0035】
実施例1で説明した流速検出装置では、1車線のトンネルに、2台1組の圧力検出装置を設置して、車両の速度Vm,投影面積Am,トンネル内風速Urを算出しているが、トンネル内に複数車線がある場合、異なる車線を走行する各々の車両の車両情報(速度,投影面積)を検出することはできない。以下では、それぞれの車線に2台1組の圧力検出装置を備えることで、トンネル内風速Urに加え、車線毎の車両情報を検出できる車両検出装置を紹介する。
【0036】
図5は、トンネル天井側から下方の道路を眺めた俯瞰図であり、各車線に2台1組の圧力検出装置を設置している。図5に示すように、上側車線では、右に向かう車両1Rが速度VmRで走行しており、下側車線では、左に向かう車両1Lが速度VmLで走行している。上側車線には、第一の圧力検出装置3R,第二の圧力検出装置4Rが設けられており、下側車線には、第三の圧力検出装置3L,第四の圧力検出装置4Lが設けられている。
【0037】
第一の圧力検出装置3Rと第二の圧力検出装置4Rで観測される静圧から、実施例1で説明した流速検出手段と同様の方法により、車両1Rの速度と投影面積を求めることができる。また、第三の圧力検出装置3Lと第四の圧力検出装置4Lで観測される静圧から、実施例1で説明した流速検出手段と同様の方法により、車両1Lの速度と投影面積を求めることができる。これから分かるように、各々の車線に2台1組の圧力検出装置を設けることで、任意の車線数のトンネルにおいても、各車線を走行する車両の車両情報を個別に検出することができる。
【0038】
いずれかの車両の速度が得られれば、実施例1の手順でトンネル内の平均流速を算出することが可能である。
【0039】
図示を省略するが、本実施例では、第一の圧力検出装置3Rと第二の圧力検出装置4Rからの信号を用いる上側車線用の流速検出装置と、第三の圧力検出装置3Lと第四の圧力検出装置4Lからの信号を用いる下側車線用の流速検出装置を独立して設けて車両検出装置を構成した。
【0040】
なお、図5では、上側車線と下側車線が対向車線である例を説明したが、両車線を同じ方向に車両が走行するトンネルにおいても、圧力検出装置を上記と同様に配置することで、各車線の車両情報を検出することができる。
【符号の説明】
【0041】
1,1R,1L 車両
2 トンネル
3,3R 第一の圧力検出装置
4,4R 第二の圧力検出装置
3L 第三の圧力検出装置
4L 第四の圧力検出装置
5 車両の速度を計算する第一の演算装置
6 車両の投影面積を計算する第二の演算装置
7 トンネル内の平均流速を計算する第三の演算装置
8 第一の圧力検出装置により得られた圧力の時系列波形
9 第二の圧力検出装置により得られた圧力の時系列波形
10 第一の圧力検出装置により得られた圧力の時系列波形(小型車通過時)
11 第一の圧力検出装置により得られた圧力の時系列波形(大型車通過時)
【特許請求の範囲】
【請求項1】
トンネル内の第一の位置に設けた第一の圧力検出手段と、
トンネル内の第二の位置に設けた第二の圧力検出手段と、
前記第一の圧力検出手段の出力と前記第二の圧力検出手段の出力の位相差から、前記トンネルを通過する自動車の速度を演算する第一の演算手段と、
該第一の演算手段で演算された前記自動車の速度と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、車両の大きさを演算する第二の演算手段と、
前記第一の演算手段で演算された前記自動車の速度と、前記第二の演算手段で演算された前記自動車の大きさと、前記第一の圧力検出手段の出力から、前記トンネル内の平均流速を演算する第三の演算手段と、
を備えたことを特徴とするトンネル内流速検出装置。
【請求項2】
トンネル内の第一の位置に設けた第一の圧力検出手段と、
トンネル内の第二の位置に設けた第二の圧力検出手段と、
前記第一の圧力検出手段の出力と前記第二の圧力検出手段の出力の位相差から、前記トンネルを通過する自動車の速度を演算する第一の演算手段と、
該第一の演算手段で演算された前記自動車の速度と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、車両の大きさを演算する第二の演算手段とを備えたことを特徴とするトンネル内車両検出装置。
【請求項1】
トンネル内の第一の位置に設けた第一の圧力検出手段と、
トンネル内の第二の位置に設けた第二の圧力検出手段と、
前記第一の圧力検出手段の出力と前記第二の圧力検出手段の出力の位相差から、前記トンネルを通過する自動車の速度を演算する第一の演算手段と、
該第一の演算手段で演算された前記自動車の速度と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、車両の大きさを演算する第二の演算手段と、
前記第一の演算手段で演算された前記自動車の速度と、前記第二の演算手段で演算された前記自動車の大きさと、前記第一の圧力検出手段の出力から、前記トンネル内の平均流速を演算する第三の演算手段と、
を備えたことを特徴とするトンネル内流速検出装置。
【請求項2】
トンネル内の第一の位置に設けた第一の圧力検出手段と、
トンネル内の第二の位置に設けた第二の圧力検出手段と、
前記第一の圧力検出手段の出力と前記第二の圧力検出手段の出力の位相差から、前記トンネルを通過する自動車の速度を演算する第一の演算手段と、
該第一の演算手段で演算された前記自動車の速度と、前記第一の圧力検出手段または第二の圧力検出手段の出力から、車両の大きさを演算する第二の演算手段とを備えたことを特徴とするトンネル内車両検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−184622(P2012−184622A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−49760(P2011−49760)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
[ Back to top ]