
トンネル内空変位計測システム、トンネル内空変位計測方法およびトンネル内空変位計
【課題】 トンネル断面の巨視的な内空変位を常時実用上十分な計測精度で得ることを可能とすると共に、簡単な機構でメンテナンスフリーを可能とする。
【解決手段】 トンネル内空変位計測システムは、覆工41に植設された支柱421〜429の各基端部に棒状変位計411,416,421,426,431,436,441,446の各端部、支柱421〜429の各先端部に棒状変位計413,414,423,424,433,434,443,444の各端部、支柱421〜429の各基端部と各先端部に棒状変位計412,415,422,425,432,435,442,445の各端部をそれぞれピン結合する。棒状変位計411〜416,421〜426,431〜436,441〜446からの軸方向変位に応じた信号に基づきトンネルの下端部の既知の2節点を基点として順次、3つの棒状変位計の交点座標を連続的に算出してトンネルの変状を測定する。
【解決手段】 トンネル内空変位計測システムは、覆工41に植設された支柱421〜429の各基端部に棒状変位計411,416,421,426,431,436,441,446の各端部、支柱421〜429の各先端部に棒状変位計413,414,423,424,433,434,443,444の各端部、支柱421〜429の各基端部と各先端部に棒状変位計412,415,422,425,432,435,442,445の各端部をそれぞれピン結合する。棒状変位計411〜416,421〜426,431〜436,441〜446からの軸方向変位に応じた信号に基づきトンネルの下端部の既知の2節点を基点として順次、3つの棒状変位計の交点座標を連続的に算出してトンネルの変状を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トンネルの内空変位を検出するトンネル内空変位計測システム、トンネル内空変位計測方法およびこれらに用いられるトンネル内空変位計に関する。
【背景技術】
【0002】
橋梁、トンネルやビルディング等の土木建築構造物の崩落や倒壊等の重大事故は、社会的・経済的損害が甚大なだけでなく、人命の損失も招くため、高い信頼性と安全性が要求される。そこで、従来より、土木建築構造物の変位を監視してその信頼性や安全性を評価することが行われている。このうち、トンネル内空の変位計測については、以下に示す各種のものがある。
まず、第1の従来例としては、アンカー手段を有する検出器本体に、回動可能な滑車とこの滑車の回動量を検出し電気信号を出力する変位計測用変換器と滑車に掛け渡されるワイヤの各端側の検出器本体に対する引出方向角度をそれぞれ検出する第1および第2の相対角度計測用変換器がそれぞれ取り付けられてなる変位計測用検出器を、トンネル内壁の複数の被測定個所にアンカー手段でそれぞれ設置し、1本のワイヤの一端をトンネル内壁の基準個所に固定し、このワイヤを複数の変位計測用検出器の各滑車に順次掛け渡し、その他端に一定張力を付与せしめる張力付与手段を連結し、変位計測用検出器および第1、第2の相対角度計測用変換器からそれぞれ出力される当該被測定個所の隣接する被測定個所または基準個所に対する区間変位および相対角度に対応する電気信号に基づいて、基準個所からの各変位計測用検出器の位置座標を所定の演算により求めるトンネル内空の変位計測方法がある(例えば、特許文献1参照。)。
【0003】
また、第2の従来例としては、光ファイバを任意の区間で任意の回数だけ往復して構造物に敷設し、光ファイバの伸張による歪みに基づいて構造物の変形量を測定する構造物の変形量測定装置がある(例えば、特許文献2参照。)。
さらに、第3の従来例としては、レーザ距離計を所定間隔をおいて所定数だけトンネル内壁面両側に配設し、レーザ距離計からのレーザ光をトンネル内壁面の所定範囲に向けて投光することで、レーザ距離計からトンネル内壁までの距離を測定し、その信号をコンピュータに送信して演算処理し、必要な表示をしながらトンネル内径の変位を監視することによりトンネル内壁面の隆起や歪み等を検知しているトンネル内壁面の変位監視システムがある(例えば、特許文献3参照。)。
【0004】
【特許文献1】特開昭62−151706号公報(特許請求の範囲第2項,第3頁右上欄第11行目〜第6頁左上欄第7行目、第1図,第5図)
【特許文献2】特開平11−237219号公報(請求項1,[0014]〜[0025]、図1,図2)
【特許文献3】特開2001−66168号公報(請求項1,[0006]〜[0007],[0018]〜[0021]、図1,図2)
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記した第1の従来例では、滑車、これに掛け渡されるワイヤ、ワイヤに一定張力を付与せしめる張力付与手段など複雑な機構を必要とするため、故障しやすいと共に、設置後のメンテナンスが必要であるという問題があった。したがって、遠隔地から自動的に、長期間に亘って経時的に、簡易に、安定的に、トンネル内空の変位計測を行うことができないという問題があった。一方、上記した第2の従来例では、ひび割れ等の局部的な変形形状(変状)しか検出できないため、崩落や倒壊等の重大事故に直接結びつくようなトンネル断面の巨視的な内空変位を計測できないという問題があった。また、上記した第2の従来例では、いわゆるOTDR(Optical Time Domain Reflectometer)の原理を利用しているため、例えば、100με以下のひずみに対して計測精度が低くて測定誤差が生じるため、実用上十分な計測精度が得られないという問題があった。また、上記した第3の従来例では、レーザ距離計を所定角度回動させる回動支持機構を必要とするため、設置環境によっては回動支持機構がさび等によって回動しなくなるおそれがあり、設置後のメンテナンスが必要であるという問題があった。したがって、遠隔地から自動的に、長期間に亘って経時的に、簡易に、安定的に、トンネル内空の変位計測を行うことができないという問題があった。
【0006】
本発明は、上述した事情に鑑みてなされたもので、トンネル断面の巨視的な内空変位を常時実用上十分な計測精度で得ることを可能とすると共に、簡単な機構でメンテナンスフリーを可能とするトンネル内空変位計測システム、トンネル内空変位計測方法およびトンネル内空変位計を提供することを目的としている。
本発明の請求項1の目的は、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することを可能とすると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工を可能とすると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良いトンネル内空変位計測システムを提供することにある。
本発明の請求項2の目的は、特に、引張ひずみだけでなく圧縮ひずみの測定も可能とすると共に、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することを可能とし、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することを可能とするトンネル内空変位計測システムを提供することにある。
【0007】
本発明の請求項3の目的は、特に、棒状変位計が軸方向以外は大きな曲げ剛性を有すると共に、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくいトンネル内空変位計測システムを提供することにある。
本発明の請求項4の目的は、特に、各棒状変位計にプリテンションを与えることを可能とすると共に、このトンネル内空変位計測システムをトンネルに設置する際に各棒状変位計の摺動部に所定のプリテンション(変位)を与えることにより、引張ひずみだけでなく圧縮ひずみも測定することを可能とすると共に、棒状変位計の座屈を防止することを可能とするトンネル内空変位計測システムを提供することにある。
本発明の請求項5の目的は、特に、各棒状変位計ごとに内部で微細なプリテンションを与えることにより棒状変位計の初期出力調整が可能となり、各棒状変位計の組み立ての作業性向上を可能とするトンネル内空変位計測方法を提供することにある。
本発明の請求項6の目的は、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出を可能とし、実用上十分な計測精度を得ることを可能とすると共に、支柱の長さを短くすることを可能とするトンネル内空変位計測方法を提供することにある。
【0008】
本発明の請求項7の目的は、特に、棒状変位計が低反力で軸方向に伸縮することを可能とするトンネル内空変位計測方法を提供することにある。
本発明の請求項8の目的は、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能とし、実用上十分な計測精度を得ることを可能とすると共に、支柱の長さを短くすることを可能とし、しかも、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することを可能とするトンネル内空変位計測方法を提供することにある。
本発明の請求項9の目的は、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することを可能とすると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工を可能とすると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良いトンネル内空変位計測方法を提供することにある。
【0009】
本発明の請求項10の目的は、特に、引張ひずみだけでなく圧縮ひずみの測定も可能とすると共に、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することを可能とし、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することを可能とし、棒状変位計が軸方向以外は大きな曲げ剛性を有すると共に、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくく、各棒状変位計にプリテンションを与えることを可能とすると共に、トンネルに設置する際に各棒状変位計の摺動部に所定のプリテンション(変位)を与えることにより引張ひずみだけでなく圧縮ひずみも測定することを可能とし、座屈を防止することを可能とし、各棒状変位計ごとに内部で微細なプリテンションを与えることにより棒状変位計の初期出力調整が可能となり、各棒状変位計の組み立ての作業性向上を可能とし、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出を可能とし、実用上十分な計測精度を得ることを可能とすると共に、低反力で軸方向に伸縮することを可能とするトンネル内空変位計を提供することにある。
本発明の請求項11の目的は、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能とし、実用上十分な計測精度を得ることを可能とすると共に、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することを可能とするトンネル内空変位計を提供することにある。
【課題を解決するための手段】
【0010】
請求項1に記載した本発明に係るトンネル内空変位計測システムは、上述した目的を達成するために、
トンネルの内壁に植設されトラス構造の束材をなす剛性大なる複数の支柱と、
隣接する前記支柱の基端部に各端部がピン結合され前記トラス構造の上弦材をなす複数の伸縮可能な第1の棒状変位計と、
隣接する前記支柱の先端部に各端部がピン結合され前記トラス構造の下弦材をなす複数の伸縮可能な第2の棒状変位計と、
隣接する前記支柱の基端部と先端部に各端部がピン結合され前記トラス構造の斜材をなす複数の伸縮可能な第3の棒状変位計と、
前記複数の第1〜第3の棒状変位計から出力される軸方向の変位に応じた信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定する制御装置と
を具備することを特徴としている。
【0011】
請求項2に記載した本発明に係るトンネル内空変位計測システムは、請求項1のシステムであって、
前記第1〜第3の棒状変位計は、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられた第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持された検出部と
を有することを特徴としている。
請求項3に記載した本発明に係るトンネル内空変位計測システムは、請求項2のシステムであって、
前記第1のシャフトは、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成されていることを特徴としている。
【0012】
請求項4に記載した本発明に係るトンネル内空変位計測システムは、請求項2または請求項3のシステムであって、
前記検出部は、前記第1のシャフトまたは前記第2のシャフトのいずれか一方または両方に引張ばねを介して支持されることを特徴としている。
請求項5に記載した本発明に係るトンネル内空変位計測システムは、請求項2〜請求項4のうちのいずれか1項のシステムであって、
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられていることを特徴としている。
請求項6に記載した本発明に係るトンネル内空変位計測システムは、請求項2〜請求項5のうちのいずれか1項のシステムであって、
前記検出部は、
両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、
空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、
前記溝に固定されて延びる光ファイバと、
前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサと
を有することを特徴としている。
【0013】
請求項7に記載した本発明に係るトンネル内空変位計測システムは、請求項6のシステムであって、
前記ゲージベースは、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成されていることを特徴としている。
請求項8に記載した本発明に係るトンネル内空変位計測システムは、請求項2〜請求項7のうちのいずれか1項のシステムであって、
前記検出部は、
中央部がくびれた起歪部と、
前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージと
を有することを特徴としている。
【0014】
請求項9に記載した本発明に係るトンネル内空変位計測方法は、上述した目的を達成するために、
トンネルの内壁に剛性大なる複数の支柱をトラス構造の束材を構成するように植設し、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第1の棒状変位計の各端部を前記トラス構造の上弦材を構成するように隣接する前記支柱の基端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第2の棒状変位計の各端部を前記トラス構造の下弦材を構成するように隣接する前記支柱の先端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第3の棒状変位計の各端部を前記トラス構造の斜材を構成するように隣接する前記支柱の基端部と先端部にピン結合により取り付け、
前記複数の第1〜第3の棒状変位計からの信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定することを特徴としている。
【0015】
請求項10に記載した本発明に係るトンネル内空変位計は、上述した目的を達成するために、
トンネルの内壁に設置され、その軸方向に加えられた変位を検出し、前記変位に応じた信号を出力するトンネル内空変位計であって、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられると共に、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成された第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に引張ばねを介して支持された検出部とを有し、
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられ、
前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有していることを特徴としている。
【0016】
請求項11に記載した本発明に係るトンネル内空変位計は、請求項10の変位計であって、
前記検出部に換えて、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有する検出部を有することを特徴としている。
【発明の効果】
【0017】
本発明によれば、トンネル断面の巨視的な内空変位を常時実用上十分な計測精度で得ることを可能とすると共に、簡単な機構でメンテナンスフリーを可能とするトンネル内空変位計測システム、トンネル内空変位計測方法およびトンネル内空変位計を提供することができる。
即ち、本発明の請求項1のトンネル内空変位計測システムによれば、トンネルの内壁に植設されトラス構造の束材をなす剛性大なる複数の支柱と、隣接する前記支柱の基端部に各端部がピン結合され前記トラス構造の上弦材をなす複数の伸縮可能な第1の棒状変位計と、隣接する前記支柱の先端部に各端部がピン結合され前記トラス構造の下弦材をなす複数の伸縮可能な第2の棒状変位計と、隣接する前記支柱の基端部と先端部に各端部がピン結合され前記トラス構造の斜材をなす複数の伸縮可能な第3の棒状変位計と、前記複数の第1〜第3の棒状変位計から出力される軸方向の変位に応じた信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定する制御装置とを具備することにより、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することが可能となると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工が可能となると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良い。
【0018】
本発明の請求項2のトンネル内空変位計測システムによれば、請求項1のシステムであって、前記第1〜第3の棒状変位計は、一端が閉塞された第1のパイプと、前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、前記第1のパイプの前記他端側に一端が取り付けられた第1のシャフトと、前記第2のパイプ内に一端が取り付けられた第2のシャフトと、前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持された検出部とを有することにより、特に、引張ひずみだけでなく圧縮ひずみの測定も可能となると共に、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することができるため、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することが可能となる。
本発明の請求項3のトンネル内空変位計測システムによれば、請求項2のシステムであって、前記第1のシャフトは、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成されていることにより、特に、棒状変位計が軸方向以外は大きな曲げ剛性を有しているので、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくい。
【0019】
本発明の請求項4のトンネル内空変位計測システムによれば、請求項2または請求項3のシステムであって、前記検出部は、前記第1のシャフトまたは前記第2のシャフトのいずれか一方または両方に引張ばねを介して支持されることにより、各棒状変位計にプリテンションを与えることが可能となるため、このトンネル内空変位計測システムをトンネルに設置する際に各棒状変位計の摺動部にスペーサ等を挟み込み所定のプリテンション(変位)を与えることにより、引張ひずみだけでなく圧縮ひずみも測定することが可能となり、棒状変位計の座屈を防止することが可能である。
本発明の請求項5のトンネル内空変位計測システムによれば、請求項2〜請求項4のうちのいずれか1項のシステムであって、前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられていることにより、特に、各棒状変位計ごとに内部で微細なプリテンションを与えることが可能となるため、各棒状変位計の初期出力調整が容易になり、各棒状変位計の組み立ての作業性が向上する。
【0020】
本発明の請求項6のトンネル内空変位計測システムによれば、請求項2〜請求項5のうちのいずれか1項のシステムであって、前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有することにより、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度が得られると共に、支柱の長さを短くすることが可能となる。
本発明の請求項7のトンネル内空変位計測システムによれば、請求項6のシステムであって、前記ゲージベースは、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成されていることにより、特に、棒状変位計が低反力で軸方向に伸縮することが可能となる。
【0021】
本発明の請求項8のトンネル内空変位計測システムによれば、請求項2〜請求項5のうちのいずれか1項のシステムであって、前記検出部は、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有することにより、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度が得られると共に、支柱の長さを短くすることが可能となり、しかも、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することが可能となる。
【0022】
本発明の請求項9のトンネル内空変位計測方法によれば、トンネルの内壁に剛性大なる複数の支柱をトラス構造の束材を構成するように植設し、軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第1の棒状変位計の各端部を前記トラス構造の上弦材を構成するように隣接する前記支柱の基端部にピン結合により取り付け、軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第2の棒状変位計の各端部を前記トラス構造の下弦材を構成するように隣接する前記支柱の先端部にピン結合により取り付け、軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第3の棒状変位計の各端部を前記トラス構造の斜材を構成するように隣接する前記支柱の基端部と先端部にピン結合により取り付け、前記複数の第1〜第3の棒状変位計からの信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定することにより、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することが可能となると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工が可能となると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良い。
【0023】
本発明の請求項10のトンネル内空変位計によれば、トンネルの内壁に設置され、その軸方向に加えられた変位を検出し、前記変位に応じた信号を出力するトンネル内空変位計であって、一端が閉塞された第1のパイプと、前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、前記第1のパイプの前記他端側に一端が取り付けられると共に、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成された第1のシャフトと、前記第2のパイプ内に一端が取り付けられた第2のシャフトと、前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に引張ばねを介して支持された検出部とを有し、前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられ、前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有し、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することが可能となり、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することが可能となる。また、棒状変位計が軸方向以外は大きな曲げ剛性を有すると共に、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくく、各棒状変位計にプリテンションを与えることが可能となると共に、トンネルに設置する際に各棒状変位計の摺動部に所定のプリテンション(変位)を与えることにより引張ひずみだけでなく圧縮ひずみも測定することが可能となる。
【0024】
これにより、作業性が向上し、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度を得ることが可能となると共に、低反力で軸方向に伸縮することが可能となり、座屈を防止することが可能となる。
本発明の請求項11のトンネル内空変位計によれば、請求項10の変位計であって、前記検出部に換えて、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有する検出部を有することにより、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度を得ることが可能となると共に、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することが可能となる。
【発明を実施するための最良の形態】
【0025】
以下、本発明に係る実施の形態に基づき、図面を参照して本発明のトンネル内空変位計測システムを詳細に説明する。
実施の形態1.
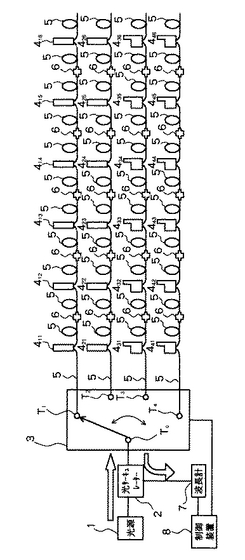
図1は、本発明の実施の形態1に係るトンネル内空変位計測システムの回路構成を示している。この例のトンネル内空変位計測システムは、光源1と、光サーキュレータ2と、光スイッチ3と、棒状変位計411〜416、421〜426、431〜436、441〜446と、光ファイバ5と、光コネクタ6と、波長計7と、制御装置8とから構成されている。棒状変位計411〜416は第1系統の計測系、棒状変位計421〜426は第2系統の計測系、棒状変位計431〜436は第3系統の計測系、棒状変位計441〜446は第4系統の計測系をそれぞれ構成している。尚、棒状変位計411〜416、421〜426、431〜436、441〜446を総称するときは、単に棒状変位計4と表す。この総称に関しては、他の構成要素でも同様である。光源1は、例えば、希土類元素添加光ファイバを、半導体レーザ等の励起用光源で励起することにより生じた自然放出光(Spontaneous Emission)が、光ファイバ内を導波するにしたがい、増幅(Amplified)される現象を利用したASE(Amplified Spontaneous Emission)光源から広帯域且つ高輝度の光出力を連続で出射する。光サーキュレータ2は、光源1から供給される光信号を光スイッチ3に供給すると共に、光スイッチ3から供給される光信号を波長計7に供給する。光スイッチ3は、制御装置8から供給される切替信号に基づいて、光サーキュレータ2から供給され、共通入出力端Tcから入射された光信号を第1〜第4の入出力端T1〜T4のいずれかから出射すると共に、第1〜第4の入出力端T1〜T4のいずれかから入射された光信号を共通入出力端Tcから出射して光サーキュレータ2に供給する。
【0026】
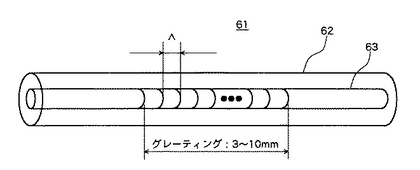
棒状変位計4は、その内部に有するファイバ・ブラッグ・グレーティング(FBG:Fiber Bragg Grating)センサというセンサデバイスを用いて軸方向のひずみを計測する。ここで、FBGセンサ61とは、図2に示すように、光ファイバ62のコア63内に所定周期(以下、「グレーティング周期」という。)Λで所定間隔おきに所定長(以下、「グレーティング長」という。)の屈折率変化部分を形成したものをいう。グレーティング周期Λは例えば、500nm、グレーティング長は例えば、3〜10mmである。上記屈折率変化部分は、例えば、紫外レーザ光を光ファイバ62に照射することにより作製する。
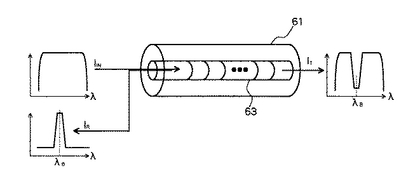
以下、FBGセンサ61の動作原理について説明する。FBGセンサ61に、図3に示すように、広帯域の波長領域を有する入射光IINを入射すると、コア63の屈折率nおよびグレーティング周期Λに応じた波長(以下、「ブラッグ波長」という。)を有する反射光IRが反射され、残りの波長領域の光が透過光ITとして透過する。ブラッグ波長のピーク波長λBは、コア63の屈折率nおよびグレーティング周期Λを用いて、式(1)で表される。
【0027】
λB=2nΛ ・・・(1)
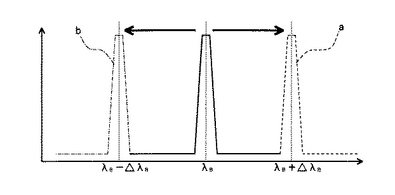
図2および図3に示すFBGセンサ61の構造から、FBGセンサ61に光軸方向にひずみを負荷した場合、コア63の屈折率nまたはグレーティング周期Λが変化し、式(1)で表されるピーク波長λBが変化することが予想される。その変化量ΔλBは、式(2)で表される。
ΔλB=λB(1−ρα)ε ・・・(2)
ここで、εはFBGセンサ61の光軸方向に負荷したときのひずみ、ραは負荷したひずみによる光ファイバ62の光弾性係数(例えば、約0.22)を意味している。
ピーク波長λBが1550nmである場合、ピーク波長λBの変化量ΔλBは、〜1.2pm/με程度である。即ち、ブラッグ波長のピーク波長λBの変化を分解能1pm(1×10−12m)程度で計測することができれば、1με(1×10−6)の分解能で、FBGセンサ61の軸方向のひずみを計測可能であることが分かる。図4にブラッグ波長のピーク波長λBのスペクトル変化の一例を示す。
【0028】
図4において、スペクトルaは、引張ひずみに比例してピーク波長λBが増加したことを示し、スペクトルbは、圧縮ひずみに比例してピーク波長λBが減少したことを示している。
この実施の形態1では、1つの系統の計測系に6本の棒状変位計4を用いているので、各棒状変位計4を構成するFBGセンサが同一または重なり合うピーク波長λBを有していると、反射光を分離できずに多点計測が不可能となる。そこで、この実施の形態1では、各棒状変位計4を構成するFBGセンサの作製時に式(1)に示すグレーティング周期Λを互いに異ならせることにより、図5に示すように、異なったピーク波長λ1、λ2、・・・、λ5、λ6を有するFBGセンサを作製すると共に、光源1には、図6に示すように、ピーク波長λ1、λ2、・・・、λ5、λ6を含む広帯域の波長帯域幅を有する光信号を出射可能なものを用いる。これにより、波長計7では、図7に示すように、各棒状変位計4に対応した反射光IRのピーク波長λ1、λ2、・・・、λ5、λ6が分離でき、多点計測が可能となる。尚、1つの系統の計測系に用いられる6本の棒状変位計4において各FBGセンサのピーク波長λBが異なっていれば良く、棒状変位計4を構成するFBGセンサのピーク波長λBの値は任意であるが、この実施の形態1では、例えば、棒状変位計411のピーク波長λBがピーク波長λ1、棒状変位計412のピーク波長λBがピーク波長λ2というように、棒状変位計4の符号の下1桁目の添え字とピーク波長λBの添え字とが対応しているものとする。
【0029】
図1に示す光ファイバ5は、例えば、石英ガラスからなり、光スイッチ3と対応する棒状変位計4との間、各棒状変位計4と対応する光コネクタ6との間に介挿され、これらの間において光信号を伝送する。また、光スイッチ3の第1、第2、第3および第4の入出力端T1、T2、T3およびT4と、対応する棒状変位計411、421、431および441との間に敷設される光ファイバ5の長さは、数kmであっても良い。これは、光源1から照射される光信号が広帯域で光強度が大きいからである。波長計7は、光サーキュレータ2から供給された光信号における複数のブラッグ波長のピーク波長を検出して制御装置8に供給する。
制御装置8は、制御部と、記憶部と、操作部と、表示部と、通信部等とを有するパーソナルコンピュータ等の情報処理装置によって構成されている。制御部は、中央処理装置(CPU)等からなり、記憶部に記憶されているトンネル内空変位計測プログラム等に基づいて、トンネル内空変位計測処理等を実行し、制御装置8の各部を制御する。即ち、例えば、トンネル内空変位計測プログラムが記憶部から読み出されると、制御部に読み込まれ、制御部の動作を制御する。
【0030】
制御部は、トンネル内空変位計測プログラムが起動されると、トンネル内空変位計測プログラムの制御により、トンネル内空変位計測処理を実行するのである。トンネル内空変位計測処理は、波長計7から供給される複数のブラッグ波長のピーク波長を物理量(例えば、力、変位等)に変換し、得られた物理量または上記物理量に統計的処理を施した結果を記憶部に順次記憶したり、自発的にまたは外部からの要求に基づいて、通信部を介して外部に通知する処理である。
記憶部は、RAMやROM、あるいはフラッシュメモリ等の半導体メモリ、FD(フロッピー(登録商標)・ディスク)が装着されるFDドライブ、HD(ハード・ディスク)が装着されるHDドライブ、MO(光磁気)ディスクが装着されるMOディスクドライブ、あるいはCD(コンパクト・ディスク)−ROM、CD−R(Recordable)、CD−RW(Rewritable)やDVD−ROM、DVD−R、DVD−RW等が装着されるCD/DVDドライブ等からなる。記憶部には、制御部が実行する各種プログラムの他、各種のデータが記憶される。操作部は、テンキー、エンターキー、あるいはファンクションキー等からなるキーボードや、マウス、タッチパッド、あるいはペンデバイス等のポインティングデバイスなどを有する。表示部は、CRTディスプレイ、液晶ディスプレイ(LCD:Liquid Crystal Display)等からなる。通信部は、図示せぬ回線やネットワーク等を介して外部とデータ通信を行う。
【0031】
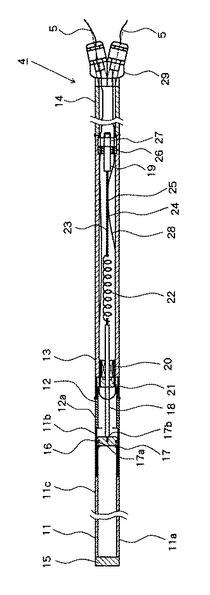
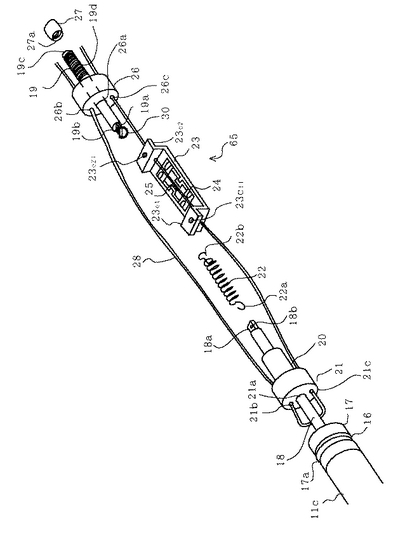
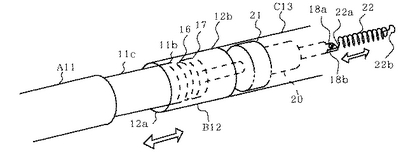
次に、棒状変位計4の詳細について、図8〜図13を参照して説明する。図8は本発明のトンネル内空変位計測システムに適用される棒状変位計4の構成を示す断面図、図9は図8に示す棒状変位計4の一部の構成を示す分解斜視図、図10は図8に示す棒状変位計4の一部の構成を示す透視斜視図である。図8〜図10において、棒状変位計4は、パイプA11〜パイプD14と、エンドプレート(キャップ)15と、Oリング16と、Oリング保持具17と、第1のシャフト18および第2のシャフト19と、リニアベアリング20と、ベアリング保持具21と、引張ばね22と、起歪部23と、ゲージベース24と、FBGセンサ25と、固定ブッシュ26と、ナット27と、光ファイバ28と、コネクタ29とから構成されている。尚、起歪部23と、ゲージベース24と、FBGセンサ25とは、検出部65を構成している。パイプA11〜パイプD14は、例えば、ステンレス(SUS304)等からなり、略円筒状を呈している。パイプA11は、その一端(図8においては左端)11aにエンドプレート15が嵌合されている。エンドプレート15は、例えば、ステンレス(SUS304)等からなり、略円盤状を呈しており、棒状変位計4の内部に水分や塵埃の混入を防止するために取り付けられるものである。
【0032】
一方、パイプA11の他端11bから全長の15%程度までには、パイプB12の一端12a側から挿入され、パイプB12の内側において、図10に矢印で示す方向に摺動可能となるようにその外径が他の部分より小さく切削加工された摺動部11cが形成されている。また、第1のパイプA11の他端11bには、例えば、ステンレス(SUS304)等からなり、略円柱状のOリング保持具17が嵌合された上、溶接により固着されている。このOリング保持具17には、軸方向の略中央外周部分に、Oリング16が装着される断面矩形状の溝17aが形成されている。また、Oリング保持具17の一端側(図8において、右端側)には、第1のシャフト18の一端が螺合する雌ねじ穴17bが形成されている。
第1および第2のシャフト18および19は、例えば、ステンレス(SUS303)等からなり、小径の棒状を呈している。第1のシャフト18は、その一端がOリング保持具17の雌ねじ穴17bに螺合されて固定されていると共に、その他端18aがベアリング保持具21の略中央部に軸方向に形成された孔21aに挿入されてその内部に保持されたリニアベアリング20により軸方向に摺動可能に支持されている。
【0033】
また、第1のシャフト18の他端18aは、扁平板状に形成されていると共に、引張ばね22のフック22aが架けられる孔18bが形成されている。ベアリング保持具21には、光ファイバ28が折り返して挿入される2つの孔21bおよび21cが形成されている。図10に示すように、パイプB12とパイプC13とは、例えば、溶接等により接合され、ベアリング保持具21は、パイプB12の他端(図8において、右端側)とパイプC13の段部との間に挟持固定される。また、パイプB12の長さ方向の略中央部から他端12bまでの内周の内径は、Oリング保持具17の外径より小さく形成されており、Oリング保持具17の右方への摺動限界(ストッパ)として機能するように構成されている。
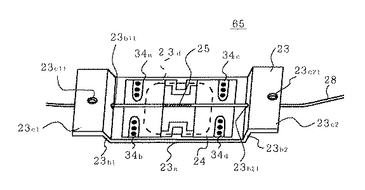
起歪部23は、例えば、ステンレス(SUS630)等からなり、図11に示すように、基部23aと、壁部23b1および23b2と、庇部23c1および23c2とが一体に形成されて構成されている。壁部23b1および23b2は、基部23aの幅と同一の幅を有すると共に、基部23aの両端からほぼ垂直に所定寸法の高さを有して立ち上がっている。庇部23c1および23c2は、基部23aの幅並びに壁部23b1および23b2の幅と同一の幅を有すると共に、それぞれ対応する壁部23b1および23b2の上端から外側に向かってほぼ水平に所定寸法の長さを有して延びている。
【0034】
起歪部23は、例えば、ステンレス板等の薄板に対して打ち抜き加工およびプレス曲げ加工等を施すことにより作製されている。基部23aの略中央部には、打ち抜きにより長円孔23dが形成されている。壁部23b1および23b2の基部23aとの接線の略中央部には、光ファイバ28が挿入される孔23b11および23b21が形成されている。また、庇部23c1の略中央部には、引張ばね22のフック22bが架けられる孔23c11(係止部)が形成されている。庇部23c2の略中央部には、第2のシャフト19の一端19aに形成された孔19bに一端が架けられたフック30の他端が架けられる孔23c21(係止部)が形成されている。
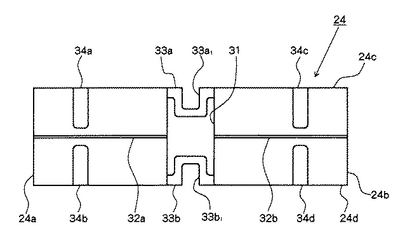
ゲージベース24は、例えば、ステンレス(SUS304)等からなり、図12および図13に示すように、平面から見た形状が全体として略矩形状を呈しており、その両短辺24aおよび24bから略等しい位置(中心位置)に略H字状の貫通された空隙部31が形成されている。また、ゲージベース24には、両長辺24cおよび24dから略等しい位置(この場合、中心位置)に空隙部31を挟んで両長辺24cおよび24dに平行に、即ち、棒状変位計4の中心軸方向に延びる断面U字状または半円形状の溝32aおよび32bが形成されている。
【0035】
さらに、ゲージベース24には、他の部分の厚さ(例えば、0.6mm)に比べてその厚さが薄い(例えば、0.2mm)薄肉部33a、33b、34a〜34dが形成されている。薄肉部33aおよび33bは、H字状を呈する空隙部31を挟んでゲージベース24の両長辺24cおよび24dに沿うように略同一の幅をもって一対のクランク状を呈するように形成されている。即ち、薄肉部33aおよび33bには、それぞれ切欠部33a1および33b1が形成されている。薄肉部33aおよび33bがこのような形状を呈しているのは、薄肉部33aおよび33bの剛性を低下させ、鋼材などの測定対象物(図示略)のひずみを拘束しないように、即ち、ひずみに応じてゲージベース24を変形し易くするためである。一方、薄肉部34aおよび34bは、ゲージベース24の短辺24aから略等距離であって、溝32aを挟んで線対称の位置に略矩形状を呈して形成されている。同様に、薄肉部34cおよび34dは、ゲージベース24の短辺24bから略等距離であって、溝32bを挟んで線対称の位置に略矩形状を呈して形成されている。薄肉部34a〜34dがこのような形状を呈しているのは、後述するスポット溶接を容易にさせるためである。
【0036】
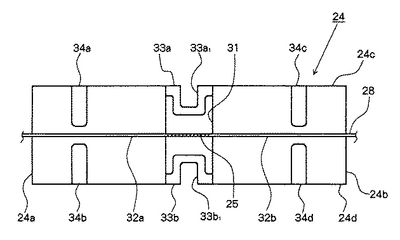
上記構成のゲージベース24は、図11に示すように、起歪部23の基部23a上に長円孔23dを塞ぐように載置された後、図11の薄肉部34a〜34d内においてそれぞれ3個の黒丸で示すように、例えば、スポット溶接により起歪部23の基部23a上に固定される。尚、ゲージベース24と起歪部23の基部23aとを固定するための溶着には、種々の形態を採用することができ、本実施の形態のスポット溶接の他、接着剤による接着、さらに、ガス圧接のような圧接のみならず、種々の融着およびろう付け技術等で両者を固定することが可能である。また、その一部にFBGセンサ25が形成された光ファイバ28は、図11に示すように、起歪部23の壁部23b1および23b2に形成された孔23b11と孔23b21との間に挿通された後、図11および図13に示すように、FBGセンサ25が空隙部31に位置するように、溝32aおよび32bに嵌入され、例えば、接着剤により溝32aおよび32bに固定される。そして、図9に示すように、起歪部23の庇部23c1に形成された孔23c11に引張ばね22のフック22bが架けられると共に、起歪部23の庇部23c2に形成された孔23c21に第2のシャフト19の孔19bとの間でフック30が架けられることにより、検出部65がパイプB12、パイプC13およびパイプD14の内部空間に保持されることになる。
【0037】
FBGセンサ25は、上記したように、例えば、光ファイバ28の一部に紫外のレーザ光を照射することにより作製される。FBGセンサ25において、グレーティング長は3〜10mm、グレーティング周期Λは500nmである。尚、ここで、パイプA11を「第1のパイプ」と称し、パイプB12、パイプC12、パイプD14を「第2のパイプ」と総称する。即ち、パイプA〜パイプDは、組立前には4本のパイプからなるが、組立後はパイプB、パイプCおよびパイプDは溶接により一体化され、軸方向への摺動は、実質的に、上記定義した第1のパイプと第2のパイプの間で行われる。
第2のシャフト19の一端19aは、直方体状(扁平板状)に形成されていると共に、フック30が架けられる孔19bが形成されている。第2のシャフト19の外周には、その他端19cから第2のシャフト19の略中央部まで、所定形状の雄ねじ19dが螺旋状に所定ピッチで形成されている。固定ブッシュ26は、例えば、ステンレス(SUS303)等からなり、略円盤状を呈している。固定ブッシュ26の略中央部には、第2のシャフト19が嵌合する孔26aが形成されている。固定ブッシュ26の起歪部23に対向する面とは反端側の面の孔26aの周縁部には、ナット27の凸球面加工された一端27aに対応して凹球面加工が施されている。
【0038】
固定ブッシュ26には、図9に示すように、孔26aを挟んで対称となる位置に、光ファイバ28が挿入される2つの孔26bおよび26cが形成されている。ナット27は、例えば、ステンレス(SUS303)からなり、略円筒状を呈しており、内周には第2のシャフト19の雄ねじ19dに螺合するための所定形状の雌ねじが螺旋状に所定ピッチで形成されている。第1および第2のシャフト18および19、引張ばね22、固定ブッシュ26およびナット27は、パイプC13の内部空間に保持された検出部65に対して所定のプリテンションを加え且つ調整するためのものである。即ち、ナット27を右回転または左回転させることにより、第2のシャフト19が軸方向に移動し、引張ばね22の付勢力が変化し検出部65に加えられるプリテンションが調整されるのである。パイプC13とパイプD14とは、例えば、組立後に溶接等により接合され、固定ブッシュ26は、パイプC13とパイプD14との接合部近傍の内部で固定される。光ファイバ28は、例えば、石英ガラスからなり、その一端がコネクタ29の第1の入力端に接続され、パイプD14内を通過した後、固定ブッシュ26の孔26bを経てパイプC13内に入る。パイプC13内に入った光ファイバ28は、パイプC13内を通過し、ベアリング保持具21の孔21bを経てパイプB12内に入った後、折り返してベアリング保持具21の孔21cを経て再びパイプC13内に入る。
【0039】
パイプC13内に再び入った光ファイバ28は、起歪部23に固定された後、固定ブッシュ26の孔26cを経てパイプD14内に入り、その他端がコネクタ29の出力端で中継用の光ファイバ5に接続される。光ファイバ28は、棒状変位計4の内部において光信号を伝送する。コネクタ29には、光ファイバ5がそれぞれ接続される。棒状変位計4は、上記構造を有しているので、変位を計測すべき棒状変位計4の軸方向に対しては低反力で伸縮するが、軸方向以外に対しては大きな曲げ剛性を有しているので、軸方向に圧縮した際の座屈が確実に防止される。
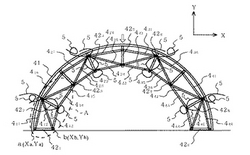
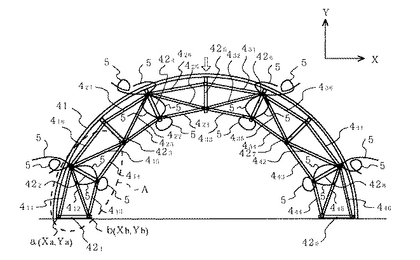
次に、上記構成のトンネル内空変位計測システムのトンネルへの設置の一例について図14および図15を参照して説明する。まず、図14に示すように、トンネルの半円弧状の覆工(内壁)41に支柱421〜429を植設する。この支柱421〜429は、なるべく覆工41が形成する円弧に垂直に設置することが望ましいが、多少傾いて設置されても良い。支柱421〜429は、例えば、帯鋼(SS400)からなり、略矩形状を呈している。これらの支柱42は、基端および先端近傍に取付座板51を取り付けるための孔が1つずつ形成され、それぞれリーマ仕上げが施されている。
【0040】
次に、図14に示すように、図1に示す第1系統の測定系を構成する棒状変位計411〜413および414〜416が支柱421と支柱422との間および支柱422と支柱423との間に、そして、図1に示す第2系統の測定系を構成する棒状変位計421〜423および424〜426が支柱423と支柱424との間および支柱424と支柱425との間に、そして、図1に示す第3系統の測定系を構成する棒状変位計431〜433および434〜436が支柱425と支柱426との間および支柱426と支柱427との間に、そして、図1に示す第4系統の測定系を構成する棒状変位計441〜443および444〜446が支柱427と支柱428との間および支柱428と支柱429との間に、それぞれトラス(truss)構造を構成するように取り付けられる。即ち、第1系統の測定系においては、支柱421〜423がトラス構造の垂直材(構造力学の分野においては「束材」と称している。)、支柱421および422の基端部近傍側の棒状変位計411および416がトラス構造の上弦材、支柱421および422の先端部近傍側(即ち、覆工41に遠い側)の棒状変位計413および414がトラス構造の下弦材、支柱421の先端と支柱422の基端との間および支柱422の基端と支柱423の先端との間にそれぞれ連結される棒状変位計412および415がトラス構造の斜材をそれぞれ構成している。
【0041】
同様に、第2系統の測定系においては、支柱423〜425がトラス構造の束材、棒状変位計421および426がトラス構造の上弦材、棒状変位計423および424がトラス構造の下弦材、棒状変位計422および425がトラス構造の斜材をそれぞれ構成している。第3系統の測定系においては、支柱425〜427がトラス構造の束材、棒状変位計431および436がトラス構造の上弦材、棒状変位計433および434がトラス構造の下弦材、棒状変位計432および435がトラス構造の斜材をそれぞれ構成している。第4系統の測定系においては、支柱427〜429がトラス構造の束材、棒状変位計441および446がトラス構造の上弦材、棒状変位計443および444がトラス構造の下弦材、棒状変位計442および445がトラス構造の斜材をそれぞれ構成している。以上説明したトラス構造の上弦材をなす棒状変位計411、416、421、426、431、436、441および446を第1の棒状変位計と称し、同様に、トラス構造の下弦材をなす棒状変位計413、414、423、424、433、434、443および444を第2の棒状変位計と称し、トラス構造の斜材をなす棒状変位計412、415、422、425、432、435、442および445を第3の棒状変位計と称する。
【0042】
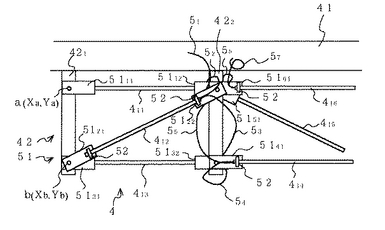
次に、棒状変位計4の設置方法および光ファイバ5の接続方法の詳細について、図14に破線でもって示す楕円Aの部分を例にとって説明する。図15は、図14の楕円Aの部分の拡大図である。尚、楕円Aの部分において覆工41は湾曲しているが、図15では説明を簡単にするために覆工41の一部を平面状のものと仮定して表している。棒状変位計4は、支柱42に取付座板51および取付具52により設置する。取付座板51は、例えば、帯鋼(SS400)からなり、略矩形状を呈している。この取付座板51は、一端近傍に当該取付座板51を支柱42に取り付けるための孔が形成され、リーマ仕上げが施されていると共に、他端近傍に棒状変位計4を取付具52により取り付けるための2つの孔が形成されている。この2つの孔の内周には所定形状の雌ねじが螺旋状に所定ピッチで形成されている。一方、取付具52は、例えば、ステンレス(SUS303)からなり、全体として略直方体状を呈している。この取付具52は、その略中央部にU字状の切欠部が形成されていると共に、切欠部の両側には棒状変位計4を当該取付具52を介して取付座板51に取り付けるために、2本のボルトが挿入される2つの孔が形成されている。2本のボルトの外周には、その一端から所定位置まで、取付座板51の2つの孔に形成された雌ねじに螺合するための所定形状の雄ねじが螺旋状に所定ピッチで形成されている。
【0043】
まず、各棒状変位計411〜416の両端に取付具52および2本のボルトにより取付座板51を取り付ける。次に、支柱421の覆工41側の基端近傍に、棒状変位計411の一端に取り付けられた取付座板5111を、図15において、棒状変位計411の一端の取付面が紙面の奥側に向いた状態で支柱421に対して紙面の手前側に配置して、支柱421に外ねじ式ストリッパボルト(リーマボルト)とナットで相対的に回動自在に連結する。一方、支柱421の先端近傍に、棒状変位計413の一端に取り付けられた取付座板5131を、図15において、棒状変位計413の一端の取付面が紙面の奥側に向いた状態で支柱421に対して紙面の手前側に配置し、かつ、棒状変位計412の一端に取り付けられた取付座板5121を、棒状変位計412の一端の取付面が紙面の手前側に向いた状態で上記取付座板5131に重ねて配置して、支柱421に外ねじ式ストリッパボルトとナットで相対的に回動自在に連結する。
【0044】
図15において、支柱422の覆工41側の基端近傍に、棒状変位計411の他端に取り付けられた取付座板5112を、棒状変位計411の他端の取付面が紙面の奥側に向いた状態で支柱422に対して紙面の手前側に配置し、また、棒状変位計412の他端に取り付けられた取付座板5122を、棒状変位計412の他端の取付面が紙面の手前側に向いた状態で上記取付座板5112に重ねて配置すると共に、棒状変位計416の一端に取り付けられた取付座板5161を、棒状変位計416の一端の取付面が紙面の手前側に向いた状態で支柱422に対して紙面の奥側に配置し、また棒状変位計415の一端に取り付けられた取付座板5151を、棒状変位計415の一端の取付面が紙面の奥側に向いた状態で上記取付座板5161に重ねて配置して、支柱422に外ねじ式ストリッパボルトとナットで相対的に回動自在に連結する。一方、図15において、支柱422の先端近傍に、棒状変位計413の他端に取り付けられた取付座板5132を、棒状変位計413の他端の取付面が紙面の奥側に向いた状態で支柱422に対して紙面の手前側に配置し、かつ、棒状変位計414の一端に取り付けられた取付座板5141を、棒状変位計441の一端の取付面が紙面の手前側に向いた状態で支柱422に対して紙面の奥側に配置して、支柱422に外ねじ式ストリッパボルトとナットで相対的に回動自在に連結する。
【0045】
以下、第2〜第4系統の測定系についても同様に行う。以上説明した設置方法を採用することにより、各棒状変位計411〜416、421〜426、431〜436および441〜446は、支柱421〜423、423〜425、425〜427および427〜429の面に対して平行に設置されると共に、支柱421〜429と取付座板51を介してピン結合されることになり、軸方向にのみ力が加わることになる。
次に、図1に示す光スイッチ3の第1の入出力端T1と、第1系統を構成する棒状変位計411〜416および光ファイバ5との接続方法について、図15を参照して説明する。図1に示す光スイッチ3の第1の入出力端T1は、図15に示す光ファイバ51を介して棒状変位計411の第1の入出力端に接続し、棒状変位計411の第2の入出力端は、光ファイバ52を介して棒状変位計412の第1の入出力端に接続する。棒状変位計412の第2の入出力端は、光ファイバ53を介して棒状変位計413の第1の入出力端に接続し、棒状変位計413の第2の入出力端は、光ファイバ54を介して棒状変位計414の第1の入出力端に接続する。棒状変位計414の第2の入出力端は、光ファイバ55を介して棒状変位計415の第1の入出力端に接続し、棒状変位計415の第2の入出力端は、光ファイバ56を介して棒状変位計416の第1の入出力端に接続する。棒状変位計416の第2の入出力端は、光ファイバ57に接続する。
【0046】
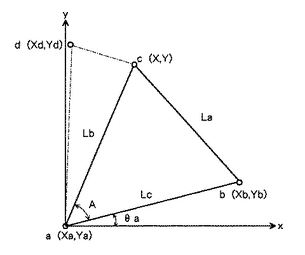
次に、上記構成のトンネル内空変位計測システムの計測原理について説明する。この実施の形態1におけるトンネル内空変位計測システムは、上記したように設置したトラス構造の上弦材、下弦材および斜材を構成する棒状変位計4に生じるひずみを検出することによりトンネル内空(覆工)の変状を計測するものである。即ち、トンネル内空の変位をトラス節点の座標変化として検出する。トラス節点変化は、トラスの辺長変化余弦定理を用いて計算する。トラスの辺長変化余弦定理は、トンネルの下端部の2点を不動点(既知の2節点)と仮定し、この既知の2節点の変位から順次、相対する変位計の長さ(辺長)から2辺の交点(各トラスの節点座標)を連続的に算出することにより、トンネル全体の変状を測定するものである。既知の2節点は、図14および図15では、例えば、トンネルの左下端部の点a(Xa,Ya)およびb(Xb,Yb)とする。
以下、トラスの辺長変化余弦定理について説明する。図16に示すように、既知の2節点の座標をa(Xa,Ya)およびb(Xb,Yb)とし、求める未知の節点の座標をc(X,Y)、角度∠baxをθa、角度∠cabをAとする。また、図16に示す三角形abcが変形する前の各辺の長さをla、lbおよびlc、三角形abcが変形した後の各辺の長さをLa、LbおよびLcとすると、接点cの座標Xおよび座標Yは、それぞれ式(3)および式(4)で表される。
【0047】
X=Xa+Lbcos(θa+A) ・・・(3)
Y=Ya+Lbsin(θa+A) ・・・(4)
三角形abcの各辺のひずみをεa、εb、εcとすると、三角形abcが変形した後の各辺の長さLa、LbおよびLcは、式(5)〜式(7)のように表される。
La=la(1+εa) ・・・(5)
Lb=lb(1+εb) ・・・(6)
Lc=lc(1+εc) ・・・(7)
また、角度θaおよび角度Aは、式(8)および式(9)で表される。
【0048】
【数1】

【0049】
【数2】
【0050】
したがって、式(5)〜式(9)を式(3)および式(4)に代入すると、接点cの座標Xおよび座標Yはそれぞれ式(10)および式(11)で表される。
【0051】
【数3】
【0052】
【数4】
【0053】
以下、図16に示す未知の節点の座標d(Xd,Yd)やその他の未知の節点の座標についても上記した方法と同様な方法により順次求めることができる。
次に、上記構成のトンネル内空変位計測システムの動作について説明する。図1、図14および図15に示す設置状態において、図14に矢印で示すように、覆工41の天端に力が加えられ、支柱425に変位が生じたとする。これにより、トラス構造の上弦材たる棒状変位計411、416、421、426、431、436、441、446、下弦材たる棒状変位計413、414、423、424、433、434、443、444および斜材たる棒状変位計412、415、422、425、432、435、442、445において、上記変位およびそれぞれの設置場所に応じた軸方向のひずみが生じる。したがって、各棒状変位計4を構成するゲージベース24が当該ひずみに応じて引っ張られまたは圧縮される。この結果、各ゲージベース24の空隙部31の間隔が、引っ張りの場合には増加し、圧縮の場合には減少する。そして、空隙部31の間隔が増減することによりゲージベース24の溝32aと32bに固着保持されたFBGセンサ25にひずみが加えられる。この際、ある棒状変位計4において、棒状変位計4を軸方向に圧縮する変位が加えられたとしても、第1のパイプたるパイプA11に形成された摺動部11cの外周全体が第2のパイプたるパイプB12の内周を摺動すると共に、パイプA11の他端11bに取り付けられた第1のシャフト18がパイプB12とパイプC13との接合部に取り付けられたリニアベアリング20内を摺動するので、軸方向に対しては低反力で伸縮し、座屈が防止される。
【0054】
尚、上述したように、パイプB12、パイプC13、パイプD14は、溶接により一体化されているので、これらを第2のパイプと総称しているが、結局は、第1のパイプと第2のパイプとの間における相対摺動量に対応したひずみが、ゲージベース24の空隙部31の間隔を変化させることになる。
このような状態において、トンネル内空変位計測システムの光源1は、ピーク波長λ1〜λ6を含む広帯域の波長帯域幅を有し、光強度の大きい光信号を連続で出射する。一方、制御装置8の制御部は、光スイッチ3に対して共通入出力端Tcと第1の入出力端T1とを接続するための切替信号を供給する。これにより、光スイッチ3は、光源1から出射され光サーキュレータ2を経て共通入出力端Tcから入射された光信号を第1の入出力端T1から出射して第1系統の計測系を構成する光ファイバ51(図15参照)の入力端に入射する。光ファイバ51に入射された光信号は、光ファイバ51内を伝送された後、棒状変位計411を構成する光ファイバ28内に入射され、対応するFBGセンサ25においてコア63の屈折率nおよび当該FBGセンサ25固有のグレーティング周期Λに応じたブラッグ波長(ピーク波長λ1)を有する反射光が反射され、残りの波長領域の光が透過し、光ファイバ52内に入射される。
【0055】
棒状変位計411を構成するFBGセンサ25において反射されたピーク波長λ1を有する光信号は、光ファイバ51内を伝送された後、光スイッチ3および光サーキュレータ2を経て波長計7に入射される。以下、光ファイバ52に入射された光信号のうち、各棒状変位計412〜416を構成するFBGセンサ25のコア63の屈折率nおよび当該FBGセンサ25固有のグレーティング周期Λに応じたブラッグ波長(ピーク波長λ2〜λ6)を有する光信号は、対応するFBGセンサ25で反射され、逆の経路を伝送された後、光スイッチ3および光サーキュレータ2を経て波長計7に入射される。
一方、光ファイバ52に入射された光信号のうち、各FBGセンサ25で反射されなかった光信号は、棒状変位計412内の光ファイバ28およびFBGセンサ25、光ファイバ53、棒状変位計413内の光ファイバ28およびFBGセンサ25、光ファイバ54、棒状変位計414内の光ファイバ28およびFBGセンサ25、光ファイバ55、棒状変位計415内の光ファイバ28およびFBGセンサ25、光ファイバ56、棒状変位計416内の光ファイバ28およびFBGセンサ25、光ファイバ57内を順次伝送され、光ファイバ57の出力端から出射される。各FBGセンサ25において光信号が反射される際には、上記したように、各FBGセンサ25にひずみが加えられており、グレーティング周期Λが変化しているので、各FBGセンサ25からの反射光のブラッグ波長のピーク波長λ1〜λ6が変化している(図7参照)。
【0056】
したがって、波長計7は、光サーキュレータ2から供給された光信号における複数のブラッグ波長の変化しているピーク波長λ1〜λ6を検出して制御装置8に供給する。これにより、制御装置8の制御部は、波長計7から供給された複数のブラッグ波長のピーク波長を物理量(例えば、力、変位等)に変換し、得られた物理量を記憶部に記憶する。
次に、制御装置8の制御部は、第2系統の計測系からのデータを収集するために、光スイッチ3に対して共通入出力端Tcと第2の入出力端T2とを接続するための切替信号を供給する。これにより、光スイッチ3は、光源1から出射され光サーキュレータ2を経て共通入出力端Tcから入射された光信号を第2の入出力端T2から出射して第2系統の計測系を構成する光ファイバ5の入力端に入射する。この後は、上記した第1系統の計測系と同様に、各棒状変位計421〜426を構成するFBGセンサ25において光信号の反射および透過が行われる。したがって、波長計7からは第2系統の計測系に関する複数のブラッグ波長のピーク波長が供給されるので、制御装置8の制御部は、当該第2系統の計測系に関する複数のブラッグ波長のピーク波長を物理量に変換し、得られた物理量を記憶部に記憶する。以下、上記処理と同様の処理を順次繰り返すことにより、制御装置8の制御部は、第3系統の計測系および第4系統の計測系からのデータを収集する。この後、制御装置8の制御部は、収集した第1〜第4系統の計測系のデータに基づいて、上記したトラスの辺長変化余弦定理によりトンネルの変位を測定する。
【0057】
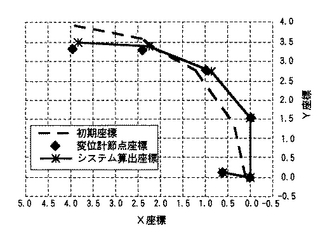
ここで、図17に実験結果の一例を示す。トンネル模型を内径8000mmの半円弧状のH型鋼(100×100×6×8)で作製し、油圧ジャッキで天端に最大60mmの強制変位を与える負荷を加えた。トンネル模型の内側の各節点座標には、図14に示すX方向およびY方向に変位計を設置し、トンネル内空変位計測システムの精度検証を行った。尚、トンネル内空変位計測システムの設置範囲は、トンネル模型の対象性を考慮して1/4円とした。図17において、初期座標とは、変位を与える前の各節点座標を意味し、変位計節点座標とは、変位を与えた後の各節点座標を変位計で計測した各接点座標を意味し、システム算出座標とは、収集されたデータに基づいて制御装置8の制御部が上記したトラスの辺長変化余弦定理により算出した座標を意味している。図17から分かるように、変位計の計測結果と良く一致している。
このように、本実施の形態1によれば、支柱421〜429を覆工41に取り付け、引張ひずみおよび圧縮ひずみの測定が可能な棒状変位計4を支柱421〜429の基端および先端にそれぞれ連結しているので、トンネル断面の巨視的な内空変位について、引張ひずみだけでなく圧縮ひずみの測定も可能である。
【0058】
また、検出感度の比較的高いFBGセンサ25を用いているので、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能であると共に、束材としての支柱42の長さを短くすることができる。各棒状変位計4ごとにプリテンションを与えていると共に、摺動部11cを設けているので、このトンネル内空変位計測システムをトンネルに設置する際に各棒状変位計4の摺動部に所定のプリテンション(変位)を与えることにより、引張ひずみだけでなく圧縮ひずみも測定することができると共に、棒状変位計の座屈を防止することができる。例えば、0〜40mmの可動範囲がある場合には、±20mmの引張ひずみおよび圧縮ひずみを高精度で測定することができ、実用上十分な計測精度が得られる。さらに、本実施の形態1によれば、トンネルの地山または覆工の表面に設置する構造であると共に、複雑な機構を必要としないため、後施工が可能であり、設置後のメンテナンスも容易である。例えば、ある棒状変位計4に何らかの原因で不具合が発生した場合であっても、当該棒状変位計4だけを取り替えれば良い。1つの系統に6本の棒状変位計4が接続可能であるので、光ファイバの収まりが良い。また、棒状変位計4は、軸方向以外は大きな曲げ剛性を有しているので、支柱421〜429から棒状変位計4に変位が正確に伝わり、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくい。 さらに、低反力で軸方向に伸縮する棒状変位計4と支柱421〜429とをピン結合によりトラス構造としているので、面内の角変形および座屈等の面外変形に伴う測定誤差(端部の曲げによる干渉)および機能上の不具合(破損やかじり)を回避することができる。さらに、各棒状変位計4の最大予想変位を想定し任意の可動範囲の棒状変位計4を設計することができるため、設計の自由度が大きいと共に、破損等の不具合を防止することができる。
【0059】
実施の形態2.
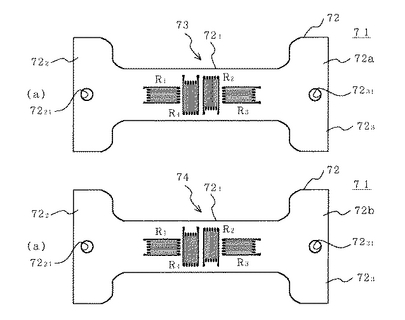
上述した実施の形態1では、トンネル内空変位の検出に、起歪部23と、ゲージベース24と、FBGセンサ25とからなる検出部65(図11参照)を用いる例を示したが、本発明は、これに限定されるものではない。例えば、本発明は、トンネル内空変位の検出にひずみゲージを有する検出部を用いても良い。図18は、本発明の実施の形態2に係るトンネル内空変位計測システムを構成する検出部71の構成を示している。この例の検出部71は、起歪板72と、ひずみゲージ73および74とから構成されている。
起歪板72は、例えば、ステンレス(SUS630)等からなり、図18に示すように、横長矩形状を呈する起歪板72の中間部には、短辺方向からくびれを呈した起歪部721が形成され、両端側には、幅広の保持部722および723が形成されている。起歪板72の起歪部721の表面72aに、図18(a)に示すように、ひずみゲージ73が接着、蒸着、融着、スパッタリングその他の手段により添着され、起歪部721の裏面72bに、図18(b)に示すように、ひずみゲージ74が同様に添着されている。一方の保持部722の端部略中央部には、図9に示す引張ばね22のフック22bが架けられる孔7221が形成され、他方の保持部723の端部略中央部には、図9に示す第2のシャフト19の一端19aに形成された孔19bとの間でフック30が架けられる孔7231が形成されている。
【0060】
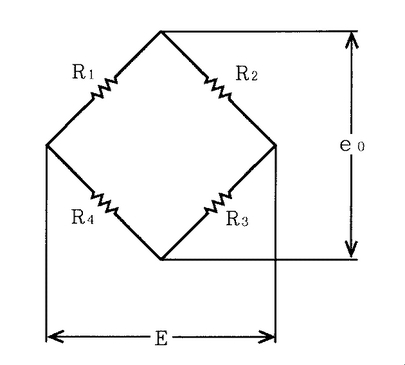
起歪板72がこのような形状を呈しているのは、起歪部721の剛性を低下させ、測定対象物(図示略)の共同を拘束せずに起歪部721を変形し易くするためである。ひずみゲージ73および74は、4ゲージ法測定モードの8線式であり、ポリイミド系樹脂のフィルムからなるゲージベース上に、厚さ数μmを有し、銅・ニッケル系合金またはニッケル・クロム系合金からなり、蛇行状の抵抗箔(ゲージ抵抗)R1〜R4が接着されて構成されている。起歪部721の表面72aおよび裏面72bにひずみゲージ73および74を添着するのは、起歪部721に加えられたひずみにより起歪部721が湾曲した場合にその湾曲成分を相殺するためであるが、片面にのみ添着するようにしても良い。ゲージ抵抗R1〜R4により図19に示すように、ブリッジ回路を構成すると共に、ゲージ抵抗R1とゲージ抵抗R4との接続点と、ゲージ抵抗R2とゲージ抵抗R3との接続点との間にブリッジ電源により電圧Eを印加すると、式(12)で表される、4個のゲージ抵抗R1〜R4にそれぞれ加えられたひずみε1〜ε4の大きさおよび極性に応じたブリッジの出力電圧eoが得られる。
【0061】
e0=(Ks/4)・(ε1−ε2+ε3−ε4)・E ・・・(12)
式(12)において、Ksは4個のゲージ抵抗R1〜R4が等しいと仮定されたゲージ率である。
上記構成の検出部71は、図9に示す検出部65に換えて、起歪板72の端部722に形成された孔7221に引張ばね22のフック22bが架けられると共に、起歪板72の端部723に形成された孔7231に第2のシャフト19の孔19bとの間でフック30が架けられることにより、検出部71がパイプC13の内部空間に保持される。この場合、図9に示す光ファイバ28に換えて、ひずみゲージ73および74の各端子にそれぞれ接続されるケーブルが固定ブッシュ26の孔26bおよび26cと、ベアリング保持具21の孔21bおよび21cとに順次挿入され、図8に示すコネクタに接続される。また、各棒状変位計間も光ファイバ5および光コネクタ6ではなくケーブルで接続される。さらに、光源1、光サーキュレータ2、光スイッチ3、波長計7に換えて、ブリッジ電源、スキャナ、データロガー等が設けられる。
このように、本実施の形態2によれば、検出感度の比較的高いひずみゲージを用いているので、上記した実施の形態1の場合と略同様の効果が得られる。
【0062】
以上、この実施の形態を図面を参照して詳述してきたが、本発明は、この実施の形態に限られるものではなく、本発明の要旨を逸脱しない範囲で種々の設計の変更等が可能である。
例えば、上述した各実施の形態では、パイプA11〜D14は、略円筒状である例を示したが、これに限定されない。例えば、パイプA11〜D14は、略角筒状であっても良い。また、上述した各実施の形態では、パイプA11の他端11bの近傍の外周に形成された摺動部11cがパイプB12の一端12aの近傍の内周に摺動可能に嵌合する例を示したが、これに限定されず、パイプA11の他端11bの近傍の内周に形成された摺動部がパイプB12の一端12aの近傍の外周に摺動可能に嵌合するように構成しても良い。
また、上述した各実施の形態では、パイプ12〜14は、別個に設けられる例を示したが、これに限定されず、組立てが可能であれば一体に形成しても良い。また、上述した各実施の形態では、検出部は引張ばね22を介して第1のシャフト18に取り付けられる例を示したが、これに限定されず、検出部は直接第1のシャフト18に取り付けても良いし、第2のシャフト19にも引張ばねを介して取り付けても良い。
また、上述した実施の形態1では、起歪部23は、基部23aと、壁部23b1および23b2と、庇部23c1および23c2とが一体に形成されて構成されている例を示したが、これに限定されず、起歪部は、基部23aのみからなり、その両端に係止部をなす孔がそれぞれ形成されているとしても良い。
【図面の簡単な説明】
【0063】
【図1】本発明の実施の形態1に係るトンネル内空変位計測システムの構成を示すシステム構成図である。
【図2】FBGセンサの構成を模式的に示す概念図である。
【図3】FBGセンサの動作原理を模式的に示す概念図である。
【図4】FBGセンサの動作原理を模式的に示す概念図である。
【図5】FBGセンサの多点計測原理を模式的に示す概念図である。
【図6】FBGセンサの多点計測原理を模式的に示す概念図である。
【図7】FBGセンサの多点計測原理を模式的に示す概念図である。
【図8】本発明の実施の形態1に係る棒状変位計の構成の一例を示す断面図である。
【図9】図8に示す棒状変位計の一部の構成を示す分解斜視図である。
【図10】図8に示す棒状変位計の一部の構成を示す透視斜視図である。
【図11】図8に示す棒状変位計に用いられる検出部の構成を示す斜視図である。
【図12】図11に示す検出部を構成するゲージベースの平面図である。
【図13】図12に示すゲージベースにFBGを取り付けた状態を示す平面図である。
【図14】図1のトンネル内空変位計測システムをトンネルに設置した一例を示す概念図である。
【図15】図14の破線Aで囲んだ部分の拡大図である。
【図16】トラスの辺長変化余弦定理を説明するための概念図である。
【図17】図1の本発明の実施の形態1に係るトンネル内空変位計測システムの模擬的実験結果の一例を示す図である。
【図18】本発明の実施の形態2に係るトンネル内空変位計測システムの一部を構成する検出部の構成を示すもので、(a)は、表面を示す平面図、(b)は、その裏面を示す底面図である。
【図19】図18に示すひずみゲージでもってホイートストンブリッジを構成してなる回路図である。
【符号の説明】
【0064】
1 光源
2 光サーキュレータ
3 光スイッチ
4,411〜416,421〜426,431〜436,441〜446 棒状変位計
5,51〜57,62 光ファイバ
6 光コネクタ
7 波長計
8 制御装置
A11 パイプ(第1のパイプ)
B12〜D14 パイプ(第2のパイプ)
11a,12a,19a,27a 一端
11b,12b,18a,19c 他端
11c 摺動部
15 エンドプレート
16 Oリング
17 Oリング保持具
17a,32a,32b 溝
17b 雌ねじ穴
18b,19b,21a〜21c,26a〜26c,23b11,23b21,23c11,23c21,7221,7231 孔
18,19 シャフト
19d ねじ山
20 リニアベアリング
21 ベアリング保持具
22 引張ばね
22a,22b,30 フック
23,72 起歪部
23a 基部
23b1,23b2 壁部
23c1,23c2 庇部
23d 長円孔
24 ゲージベース
24a,24b 短辺
24c,24d 長辺
25,61 FBGセンサ
26 固定ブッシュ
27 ナット
28 光ファイバ
29 コネクタ
31 空隙部
33a,33b,34a〜34d 薄肉部
33a1,33b1 切欠部
41 覆工
421〜429 支柱
51,5111,5112,5121,5122,5131,5132,5141,5151,5161 取付座板
52 取付具
63 コア
65,71 検出部
721 中央部
722,723 保持部
72a 表面
72b 裏面
73,74 ひずみゲージ
【技術分野】
【0001】
本発明は、トンネルの内空変位を検出するトンネル内空変位計測システム、トンネル内空変位計測方法およびこれらに用いられるトンネル内空変位計に関する。
【背景技術】
【0002】
橋梁、トンネルやビルディング等の土木建築構造物の崩落や倒壊等の重大事故は、社会的・経済的損害が甚大なだけでなく、人命の損失も招くため、高い信頼性と安全性が要求される。そこで、従来より、土木建築構造物の変位を監視してその信頼性や安全性を評価することが行われている。このうち、トンネル内空の変位計測については、以下に示す各種のものがある。
まず、第1の従来例としては、アンカー手段を有する検出器本体に、回動可能な滑車とこの滑車の回動量を検出し電気信号を出力する変位計測用変換器と滑車に掛け渡されるワイヤの各端側の検出器本体に対する引出方向角度をそれぞれ検出する第1および第2の相対角度計測用変換器がそれぞれ取り付けられてなる変位計測用検出器を、トンネル内壁の複数の被測定個所にアンカー手段でそれぞれ設置し、1本のワイヤの一端をトンネル内壁の基準個所に固定し、このワイヤを複数の変位計測用検出器の各滑車に順次掛け渡し、その他端に一定張力を付与せしめる張力付与手段を連結し、変位計測用検出器および第1、第2の相対角度計測用変換器からそれぞれ出力される当該被測定個所の隣接する被測定個所または基準個所に対する区間変位および相対角度に対応する電気信号に基づいて、基準個所からの各変位計測用検出器の位置座標を所定の演算により求めるトンネル内空の変位計測方法がある(例えば、特許文献1参照。)。
【0003】
また、第2の従来例としては、光ファイバを任意の区間で任意の回数だけ往復して構造物に敷設し、光ファイバの伸張による歪みに基づいて構造物の変形量を測定する構造物の変形量測定装置がある(例えば、特許文献2参照。)。
さらに、第3の従来例としては、レーザ距離計を所定間隔をおいて所定数だけトンネル内壁面両側に配設し、レーザ距離計からのレーザ光をトンネル内壁面の所定範囲に向けて投光することで、レーザ距離計からトンネル内壁までの距離を測定し、その信号をコンピュータに送信して演算処理し、必要な表示をしながらトンネル内径の変位を監視することによりトンネル内壁面の隆起や歪み等を検知しているトンネル内壁面の変位監視システムがある(例えば、特許文献3参照。)。
【0004】
【特許文献1】特開昭62−151706号公報(特許請求の範囲第2項,第3頁右上欄第11行目〜第6頁左上欄第7行目、第1図,第5図)
【特許文献2】特開平11−237219号公報(請求項1,[0014]〜[0025]、図1,図2)
【特許文献3】特開2001−66168号公報(請求項1,[0006]〜[0007],[0018]〜[0021]、図1,図2)
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記した第1の従来例では、滑車、これに掛け渡されるワイヤ、ワイヤに一定張力を付与せしめる張力付与手段など複雑な機構を必要とするため、故障しやすいと共に、設置後のメンテナンスが必要であるという問題があった。したがって、遠隔地から自動的に、長期間に亘って経時的に、簡易に、安定的に、トンネル内空の変位計測を行うことができないという問題があった。一方、上記した第2の従来例では、ひび割れ等の局部的な変形形状(変状)しか検出できないため、崩落や倒壊等の重大事故に直接結びつくようなトンネル断面の巨視的な内空変位を計測できないという問題があった。また、上記した第2の従来例では、いわゆるOTDR(Optical Time Domain Reflectometer)の原理を利用しているため、例えば、100με以下のひずみに対して計測精度が低くて測定誤差が生じるため、実用上十分な計測精度が得られないという問題があった。また、上記した第3の従来例では、レーザ距離計を所定角度回動させる回動支持機構を必要とするため、設置環境によっては回動支持機構がさび等によって回動しなくなるおそれがあり、設置後のメンテナンスが必要であるという問題があった。したがって、遠隔地から自動的に、長期間に亘って経時的に、簡易に、安定的に、トンネル内空の変位計測を行うことができないという問題があった。
【0006】
本発明は、上述した事情に鑑みてなされたもので、トンネル断面の巨視的な内空変位を常時実用上十分な計測精度で得ることを可能とすると共に、簡単な機構でメンテナンスフリーを可能とするトンネル内空変位計測システム、トンネル内空変位計測方法およびトンネル内空変位計を提供することを目的としている。
本発明の請求項1の目的は、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することを可能とすると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工を可能とすると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良いトンネル内空変位計測システムを提供することにある。
本発明の請求項2の目的は、特に、引張ひずみだけでなく圧縮ひずみの測定も可能とすると共に、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することを可能とし、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することを可能とするトンネル内空変位計測システムを提供することにある。
【0007】
本発明の請求項3の目的は、特に、棒状変位計が軸方向以外は大きな曲げ剛性を有すると共に、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくいトンネル内空変位計測システムを提供することにある。
本発明の請求項4の目的は、特に、各棒状変位計にプリテンションを与えることを可能とすると共に、このトンネル内空変位計測システムをトンネルに設置する際に各棒状変位計の摺動部に所定のプリテンション(変位)を与えることにより、引張ひずみだけでなく圧縮ひずみも測定することを可能とすると共に、棒状変位計の座屈を防止することを可能とするトンネル内空変位計測システムを提供することにある。
本発明の請求項5の目的は、特に、各棒状変位計ごとに内部で微細なプリテンションを与えることにより棒状変位計の初期出力調整が可能となり、各棒状変位計の組み立ての作業性向上を可能とするトンネル内空変位計測方法を提供することにある。
本発明の請求項6の目的は、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出を可能とし、実用上十分な計測精度を得ることを可能とすると共に、支柱の長さを短くすることを可能とするトンネル内空変位計測方法を提供することにある。
【0008】
本発明の請求項7の目的は、特に、棒状変位計が低反力で軸方向に伸縮することを可能とするトンネル内空変位計測方法を提供することにある。
本発明の請求項8の目的は、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能とし、実用上十分な計測精度を得ることを可能とすると共に、支柱の長さを短くすることを可能とし、しかも、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することを可能とするトンネル内空変位計測方法を提供することにある。
本発明の請求項9の目的は、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することを可能とすると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工を可能とすると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良いトンネル内空変位計測方法を提供することにある。
【0009】
本発明の請求項10の目的は、特に、引張ひずみだけでなく圧縮ひずみの測定も可能とすると共に、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することを可能とし、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することを可能とし、棒状変位計が軸方向以外は大きな曲げ剛性を有すると共に、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくく、各棒状変位計にプリテンションを与えることを可能とすると共に、トンネルに設置する際に各棒状変位計の摺動部に所定のプリテンション(変位)を与えることにより引張ひずみだけでなく圧縮ひずみも測定することを可能とし、座屈を防止することを可能とし、各棒状変位計ごとに内部で微細なプリテンションを与えることにより棒状変位計の初期出力調整が可能となり、各棒状変位計の組み立ての作業性向上を可能とし、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出を可能とし、実用上十分な計測精度を得ることを可能とすると共に、低反力で軸方向に伸縮することを可能とするトンネル内空変位計を提供することにある。
本発明の請求項11の目的は、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能とし、実用上十分な計測精度を得ることを可能とすると共に、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することを可能とするトンネル内空変位計を提供することにある。
【課題を解決するための手段】
【0010】
請求項1に記載した本発明に係るトンネル内空変位計測システムは、上述した目的を達成するために、
トンネルの内壁に植設されトラス構造の束材をなす剛性大なる複数の支柱と、
隣接する前記支柱の基端部に各端部がピン結合され前記トラス構造の上弦材をなす複数の伸縮可能な第1の棒状変位計と、
隣接する前記支柱の先端部に各端部がピン結合され前記トラス構造の下弦材をなす複数の伸縮可能な第2の棒状変位計と、
隣接する前記支柱の基端部と先端部に各端部がピン結合され前記トラス構造の斜材をなす複数の伸縮可能な第3の棒状変位計と、
前記複数の第1〜第3の棒状変位計から出力される軸方向の変位に応じた信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定する制御装置と
を具備することを特徴としている。
【0011】
請求項2に記載した本発明に係るトンネル内空変位計測システムは、請求項1のシステムであって、
前記第1〜第3の棒状変位計は、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられた第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持された検出部と
を有することを特徴としている。
請求項3に記載した本発明に係るトンネル内空変位計測システムは、請求項2のシステムであって、
前記第1のシャフトは、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成されていることを特徴としている。
【0012】
請求項4に記載した本発明に係るトンネル内空変位計測システムは、請求項2または請求項3のシステムであって、
前記検出部は、前記第1のシャフトまたは前記第2のシャフトのいずれか一方または両方に引張ばねを介して支持されることを特徴としている。
請求項5に記載した本発明に係るトンネル内空変位計測システムは、請求項2〜請求項4のうちのいずれか1項のシステムであって、
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられていることを特徴としている。
請求項6に記載した本発明に係るトンネル内空変位計測システムは、請求項2〜請求項5のうちのいずれか1項のシステムであって、
前記検出部は、
両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、
空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、
前記溝に固定されて延びる光ファイバと、
前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサと
を有することを特徴としている。
【0013】
請求項7に記載した本発明に係るトンネル内空変位計測システムは、請求項6のシステムであって、
前記ゲージベースは、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成されていることを特徴としている。
請求項8に記載した本発明に係るトンネル内空変位計測システムは、請求項2〜請求項7のうちのいずれか1項のシステムであって、
前記検出部は、
中央部がくびれた起歪部と、
前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージと
を有することを特徴としている。
【0014】
請求項9に記載した本発明に係るトンネル内空変位計測方法は、上述した目的を達成するために、
トンネルの内壁に剛性大なる複数の支柱をトラス構造の束材を構成するように植設し、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第1の棒状変位計の各端部を前記トラス構造の上弦材を構成するように隣接する前記支柱の基端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第2の棒状変位計の各端部を前記トラス構造の下弦材を構成するように隣接する前記支柱の先端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第3の棒状変位計の各端部を前記トラス構造の斜材を構成するように隣接する前記支柱の基端部と先端部にピン結合により取り付け、
前記複数の第1〜第3の棒状変位計からの信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定することを特徴としている。
【0015】
請求項10に記載した本発明に係るトンネル内空変位計は、上述した目的を達成するために、
トンネルの内壁に設置され、その軸方向に加えられた変位を検出し、前記変位に応じた信号を出力するトンネル内空変位計であって、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられると共に、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成された第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に引張ばねを介して支持された検出部とを有し、
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられ、
前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有していることを特徴としている。
【0016】
請求項11に記載した本発明に係るトンネル内空変位計は、請求項10の変位計であって、
前記検出部に換えて、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有する検出部を有することを特徴としている。
【発明の効果】
【0017】
本発明によれば、トンネル断面の巨視的な内空変位を常時実用上十分な計測精度で得ることを可能とすると共に、簡単な機構でメンテナンスフリーを可能とするトンネル内空変位計測システム、トンネル内空変位計測方法およびトンネル内空変位計を提供することができる。
即ち、本発明の請求項1のトンネル内空変位計測システムによれば、トンネルの内壁に植設されトラス構造の束材をなす剛性大なる複数の支柱と、隣接する前記支柱の基端部に各端部がピン結合され前記トラス構造の上弦材をなす複数の伸縮可能な第1の棒状変位計と、隣接する前記支柱の先端部に各端部がピン結合され前記トラス構造の下弦材をなす複数の伸縮可能な第2の棒状変位計と、隣接する前記支柱の基端部と先端部に各端部がピン結合され前記トラス構造の斜材をなす複数の伸縮可能な第3の棒状変位計と、前記複数の第1〜第3の棒状変位計から出力される軸方向の変位に応じた信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定する制御装置とを具備することにより、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することが可能となると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工が可能となると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良い。
【0018】
本発明の請求項2のトンネル内空変位計測システムによれば、請求項1のシステムであって、前記第1〜第3の棒状変位計は、一端が閉塞された第1のパイプと、前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、前記第1のパイプの前記他端側に一端が取り付けられた第1のシャフトと、前記第2のパイプ内に一端が取り付けられた第2のシャフトと、前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持された検出部とを有することにより、特に、引張ひずみだけでなく圧縮ひずみの測定も可能となると共に、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することができるため、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することが可能となる。
本発明の請求項3のトンネル内空変位計測システムによれば、請求項2のシステムであって、前記第1のシャフトは、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成されていることにより、特に、棒状変位計が軸方向以外は大きな曲げ剛性を有しているので、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくい。
【0019】
本発明の請求項4のトンネル内空変位計測システムによれば、請求項2または請求項3のシステムであって、前記検出部は、前記第1のシャフトまたは前記第2のシャフトのいずれか一方または両方に引張ばねを介して支持されることにより、各棒状変位計にプリテンションを与えることが可能となるため、このトンネル内空変位計測システムをトンネルに設置する際に各棒状変位計の摺動部にスペーサ等を挟み込み所定のプリテンション(変位)を与えることにより、引張ひずみだけでなく圧縮ひずみも測定することが可能となり、棒状変位計の座屈を防止することが可能である。
本発明の請求項5のトンネル内空変位計測システムによれば、請求項2〜請求項4のうちのいずれか1項のシステムであって、前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられていることにより、特に、各棒状変位計ごとに内部で微細なプリテンションを与えることが可能となるため、各棒状変位計の初期出力調整が容易になり、各棒状変位計の組み立ての作業性が向上する。
【0020】
本発明の請求項6のトンネル内空変位計測システムによれば、請求項2〜請求項5のうちのいずれか1項のシステムであって、前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有することにより、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度が得られると共に、支柱の長さを短くすることが可能となる。
本発明の請求項7のトンネル内空変位計測システムによれば、請求項6のシステムであって、前記ゲージベースは、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成されていることにより、特に、棒状変位計が低反力で軸方向に伸縮することが可能となる。
【0021】
本発明の請求項8のトンネル内空変位計測システムによれば、請求項2〜請求項5のうちのいずれか1項のシステムであって、前記検出部は、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有することにより、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度が得られると共に、支柱の長さを短くすることが可能となり、しかも、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することが可能となる。
【0022】
本発明の請求項9のトンネル内空変位計測方法によれば、トンネルの内壁に剛性大なる複数の支柱をトラス構造の束材を構成するように植設し、軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第1の棒状変位計の各端部を前記トラス構造の上弦材を構成するように隣接する前記支柱の基端部にピン結合により取り付け、軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第2の棒状変位計の各端部を前記トラス構造の下弦材を構成するように隣接する前記支柱の先端部にピン結合により取り付け、軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第3の棒状変位計の各端部を前記トラス構造の斜材を構成するように隣接する前記支柱の基端部と先端部にピン結合により取り付け、前記複数の第1〜第3の棒状変位計からの信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定することにより、特に、面内の角変形および座屈等の面外変形に伴う測定誤差(曲げによる干渉)および機能上の不具合(破損やかじり)を回避することが可能となると共に、トンネルの地山または覆工の表面に設置する構造とし、かつ、複雑な機構を必要とせず、後施工が可能となると共に、設置後のメンテナンスも容易であり、ある棒状変位計に何らかの原因で不具合が発生した場合であっても、当該棒状変位計だけを取り替えるだけで良い。
【0023】
本発明の請求項10のトンネル内空変位計によれば、トンネルの内壁に設置され、その軸方向に加えられた変位を検出し、前記変位に応じた信号を出力するトンネル内空変位計であって、一端が閉塞された第1のパイプと、前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、前記第1のパイプの前記他端側に一端が取り付けられると共に、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成された第1のシャフトと、前記第2のパイプ内に一端が取り付けられた第2のシャフトと、前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に引張ばねを介して支持された検出部とを有し、前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられ、前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有し、各棒状変位計の最大予想変位を想定しその最大予想変位を充分にカバーし得る可動範囲の棒状変位計を設計することが可能となり、設計の自由度が大きいと共に、予想以上の変位に際し破損等の不具合を防止することが可能となる。また、棒状変位計が軸方向以外は大きな曲げ剛性を有すると共に、支柱から棒状変位計に変位を伝えやすく、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくく、各棒状変位計にプリテンションを与えることが可能となると共に、トンネルに設置する際に各棒状変位計の摺動部に所定のプリテンション(変位)を与えることにより引張ひずみだけでなく圧縮ひずみも測定することが可能となる。
【0024】
これにより、作業性が向上し、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度を得ることが可能となると共に、低反力で軸方向に伸縮することが可能となり、座屈を防止することが可能となる。
本発明の請求項11のトンネル内空変位計によれば、請求項10の変位計であって、前記検出部に換えて、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有する検出部を有することにより、特に、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能となり、実用上十分な計測精度を得ることが可能となると共に、起歪部に加えられたひずみにより起歪部が湾曲した場合にその湾曲成分を相殺することが可能となる。
【発明を実施するための最良の形態】
【0025】
以下、本発明に係る実施の形態に基づき、図面を参照して本発明のトンネル内空変位計測システムを詳細に説明する。
実施の形態1.
図1は、本発明の実施の形態1に係るトンネル内空変位計測システムの回路構成を示している。この例のトンネル内空変位計測システムは、光源1と、光サーキュレータ2と、光スイッチ3と、棒状変位計411〜416、421〜426、431〜436、441〜446と、光ファイバ5と、光コネクタ6と、波長計7と、制御装置8とから構成されている。棒状変位計411〜416は第1系統の計測系、棒状変位計421〜426は第2系統の計測系、棒状変位計431〜436は第3系統の計測系、棒状変位計441〜446は第4系統の計測系をそれぞれ構成している。尚、棒状変位計411〜416、421〜426、431〜436、441〜446を総称するときは、単に棒状変位計4と表す。この総称に関しては、他の構成要素でも同様である。光源1は、例えば、希土類元素添加光ファイバを、半導体レーザ等の励起用光源で励起することにより生じた自然放出光(Spontaneous Emission)が、光ファイバ内を導波するにしたがい、増幅(Amplified)される現象を利用したASE(Amplified Spontaneous Emission)光源から広帯域且つ高輝度の光出力を連続で出射する。光サーキュレータ2は、光源1から供給される光信号を光スイッチ3に供給すると共に、光スイッチ3から供給される光信号を波長計7に供給する。光スイッチ3は、制御装置8から供給される切替信号に基づいて、光サーキュレータ2から供給され、共通入出力端Tcから入射された光信号を第1〜第4の入出力端T1〜T4のいずれかから出射すると共に、第1〜第4の入出力端T1〜T4のいずれかから入射された光信号を共通入出力端Tcから出射して光サーキュレータ2に供給する。
【0026】
棒状変位計4は、その内部に有するファイバ・ブラッグ・グレーティング(FBG:Fiber Bragg Grating)センサというセンサデバイスを用いて軸方向のひずみを計測する。ここで、FBGセンサ61とは、図2に示すように、光ファイバ62のコア63内に所定周期(以下、「グレーティング周期」という。)Λで所定間隔おきに所定長(以下、「グレーティング長」という。)の屈折率変化部分を形成したものをいう。グレーティング周期Λは例えば、500nm、グレーティング長は例えば、3〜10mmである。上記屈折率変化部分は、例えば、紫外レーザ光を光ファイバ62に照射することにより作製する。
以下、FBGセンサ61の動作原理について説明する。FBGセンサ61に、図3に示すように、広帯域の波長領域を有する入射光IINを入射すると、コア63の屈折率nおよびグレーティング周期Λに応じた波長(以下、「ブラッグ波長」という。)を有する反射光IRが反射され、残りの波長領域の光が透過光ITとして透過する。ブラッグ波長のピーク波長λBは、コア63の屈折率nおよびグレーティング周期Λを用いて、式(1)で表される。
【0027】
λB=2nΛ ・・・(1)
図2および図3に示すFBGセンサ61の構造から、FBGセンサ61に光軸方向にひずみを負荷した場合、コア63の屈折率nまたはグレーティング周期Λが変化し、式(1)で表されるピーク波長λBが変化することが予想される。その変化量ΔλBは、式(2)で表される。
ΔλB=λB(1−ρα)ε ・・・(2)
ここで、εはFBGセンサ61の光軸方向に負荷したときのひずみ、ραは負荷したひずみによる光ファイバ62の光弾性係数(例えば、約0.22)を意味している。
ピーク波長λBが1550nmである場合、ピーク波長λBの変化量ΔλBは、〜1.2pm/με程度である。即ち、ブラッグ波長のピーク波長λBの変化を分解能1pm(1×10−12m)程度で計測することができれば、1με(1×10−6)の分解能で、FBGセンサ61の軸方向のひずみを計測可能であることが分かる。図4にブラッグ波長のピーク波長λBのスペクトル変化の一例を示す。
【0028】
図4において、スペクトルaは、引張ひずみに比例してピーク波長λBが増加したことを示し、スペクトルbは、圧縮ひずみに比例してピーク波長λBが減少したことを示している。
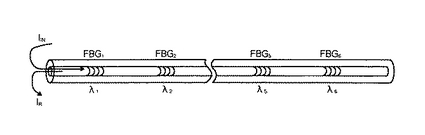
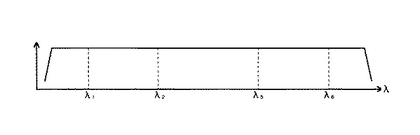
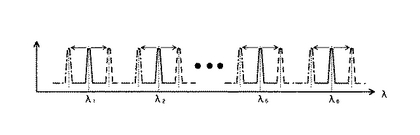
この実施の形態1では、1つの系統の計測系に6本の棒状変位計4を用いているので、各棒状変位計4を構成するFBGセンサが同一または重なり合うピーク波長λBを有していると、反射光を分離できずに多点計測が不可能となる。そこで、この実施の形態1では、各棒状変位計4を構成するFBGセンサの作製時に式(1)に示すグレーティング周期Λを互いに異ならせることにより、図5に示すように、異なったピーク波長λ1、λ2、・・・、λ5、λ6を有するFBGセンサを作製すると共に、光源1には、図6に示すように、ピーク波長λ1、λ2、・・・、λ5、λ6を含む広帯域の波長帯域幅を有する光信号を出射可能なものを用いる。これにより、波長計7では、図7に示すように、各棒状変位計4に対応した反射光IRのピーク波長λ1、λ2、・・・、λ5、λ6が分離でき、多点計測が可能となる。尚、1つの系統の計測系に用いられる6本の棒状変位計4において各FBGセンサのピーク波長λBが異なっていれば良く、棒状変位計4を構成するFBGセンサのピーク波長λBの値は任意であるが、この実施の形態1では、例えば、棒状変位計411のピーク波長λBがピーク波長λ1、棒状変位計412のピーク波長λBがピーク波長λ2というように、棒状変位計4の符号の下1桁目の添え字とピーク波長λBの添え字とが対応しているものとする。
【0029】
図1に示す光ファイバ5は、例えば、石英ガラスからなり、光スイッチ3と対応する棒状変位計4との間、各棒状変位計4と対応する光コネクタ6との間に介挿され、これらの間において光信号を伝送する。また、光スイッチ3の第1、第2、第3および第4の入出力端T1、T2、T3およびT4と、対応する棒状変位計411、421、431および441との間に敷設される光ファイバ5の長さは、数kmであっても良い。これは、光源1から照射される光信号が広帯域で光強度が大きいからである。波長計7は、光サーキュレータ2から供給された光信号における複数のブラッグ波長のピーク波長を検出して制御装置8に供給する。
制御装置8は、制御部と、記憶部と、操作部と、表示部と、通信部等とを有するパーソナルコンピュータ等の情報処理装置によって構成されている。制御部は、中央処理装置(CPU)等からなり、記憶部に記憶されているトンネル内空変位計測プログラム等に基づいて、トンネル内空変位計測処理等を実行し、制御装置8の各部を制御する。即ち、例えば、トンネル内空変位計測プログラムが記憶部から読み出されると、制御部に読み込まれ、制御部の動作を制御する。
【0030】
制御部は、トンネル内空変位計測プログラムが起動されると、トンネル内空変位計測プログラムの制御により、トンネル内空変位計測処理を実行するのである。トンネル内空変位計測処理は、波長計7から供給される複数のブラッグ波長のピーク波長を物理量(例えば、力、変位等)に変換し、得られた物理量または上記物理量に統計的処理を施した結果を記憶部に順次記憶したり、自発的にまたは外部からの要求に基づいて、通信部を介して外部に通知する処理である。
記憶部は、RAMやROM、あるいはフラッシュメモリ等の半導体メモリ、FD(フロッピー(登録商標)・ディスク)が装着されるFDドライブ、HD(ハード・ディスク)が装着されるHDドライブ、MO(光磁気)ディスクが装着されるMOディスクドライブ、あるいはCD(コンパクト・ディスク)−ROM、CD−R(Recordable)、CD−RW(Rewritable)やDVD−ROM、DVD−R、DVD−RW等が装着されるCD/DVDドライブ等からなる。記憶部には、制御部が実行する各種プログラムの他、各種のデータが記憶される。操作部は、テンキー、エンターキー、あるいはファンクションキー等からなるキーボードや、マウス、タッチパッド、あるいはペンデバイス等のポインティングデバイスなどを有する。表示部は、CRTディスプレイ、液晶ディスプレイ(LCD:Liquid Crystal Display)等からなる。通信部は、図示せぬ回線やネットワーク等を介して外部とデータ通信を行う。
【0031】
次に、棒状変位計4の詳細について、図8〜図13を参照して説明する。図8は本発明のトンネル内空変位計測システムに適用される棒状変位計4の構成を示す断面図、図9は図8に示す棒状変位計4の一部の構成を示す分解斜視図、図10は図8に示す棒状変位計4の一部の構成を示す透視斜視図である。図8〜図10において、棒状変位計4は、パイプA11〜パイプD14と、エンドプレート(キャップ)15と、Oリング16と、Oリング保持具17と、第1のシャフト18および第2のシャフト19と、リニアベアリング20と、ベアリング保持具21と、引張ばね22と、起歪部23と、ゲージベース24と、FBGセンサ25と、固定ブッシュ26と、ナット27と、光ファイバ28と、コネクタ29とから構成されている。尚、起歪部23と、ゲージベース24と、FBGセンサ25とは、検出部65を構成している。パイプA11〜パイプD14は、例えば、ステンレス(SUS304)等からなり、略円筒状を呈している。パイプA11は、その一端(図8においては左端)11aにエンドプレート15が嵌合されている。エンドプレート15は、例えば、ステンレス(SUS304)等からなり、略円盤状を呈しており、棒状変位計4の内部に水分や塵埃の混入を防止するために取り付けられるものである。
【0032】
一方、パイプA11の他端11bから全長の15%程度までには、パイプB12の一端12a側から挿入され、パイプB12の内側において、図10に矢印で示す方向に摺動可能となるようにその外径が他の部分より小さく切削加工された摺動部11cが形成されている。また、第1のパイプA11の他端11bには、例えば、ステンレス(SUS304)等からなり、略円柱状のOリング保持具17が嵌合された上、溶接により固着されている。このOリング保持具17には、軸方向の略中央外周部分に、Oリング16が装着される断面矩形状の溝17aが形成されている。また、Oリング保持具17の一端側(図8において、右端側)には、第1のシャフト18の一端が螺合する雌ねじ穴17bが形成されている。
第1および第2のシャフト18および19は、例えば、ステンレス(SUS303)等からなり、小径の棒状を呈している。第1のシャフト18は、その一端がOリング保持具17の雌ねじ穴17bに螺合されて固定されていると共に、その他端18aがベアリング保持具21の略中央部に軸方向に形成された孔21aに挿入されてその内部に保持されたリニアベアリング20により軸方向に摺動可能に支持されている。
【0033】
また、第1のシャフト18の他端18aは、扁平板状に形成されていると共に、引張ばね22のフック22aが架けられる孔18bが形成されている。ベアリング保持具21には、光ファイバ28が折り返して挿入される2つの孔21bおよび21cが形成されている。図10に示すように、パイプB12とパイプC13とは、例えば、溶接等により接合され、ベアリング保持具21は、パイプB12の他端(図8において、右端側)とパイプC13の段部との間に挟持固定される。また、パイプB12の長さ方向の略中央部から他端12bまでの内周の内径は、Oリング保持具17の外径より小さく形成されており、Oリング保持具17の右方への摺動限界(ストッパ)として機能するように構成されている。
起歪部23は、例えば、ステンレス(SUS630)等からなり、図11に示すように、基部23aと、壁部23b1および23b2と、庇部23c1および23c2とが一体に形成されて構成されている。壁部23b1および23b2は、基部23aの幅と同一の幅を有すると共に、基部23aの両端からほぼ垂直に所定寸法の高さを有して立ち上がっている。庇部23c1および23c2は、基部23aの幅並びに壁部23b1および23b2の幅と同一の幅を有すると共に、それぞれ対応する壁部23b1および23b2の上端から外側に向かってほぼ水平に所定寸法の長さを有して延びている。
【0034】
起歪部23は、例えば、ステンレス板等の薄板に対して打ち抜き加工およびプレス曲げ加工等を施すことにより作製されている。基部23aの略中央部には、打ち抜きにより長円孔23dが形成されている。壁部23b1および23b2の基部23aとの接線の略中央部には、光ファイバ28が挿入される孔23b11および23b21が形成されている。また、庇部23c1の略中央部には、引張ばね22のフック22bが架けられる孔23c11(係止部)が形成されている。庇部23c2の略中央部には、第2のシャフト19の一端19aに形成された孔19bに一端が架けられたフック30の他端が架けられる孔23c21(係止部)が形成されている。
ゲージベース24は、例えば、ステンレス(SUS304)等からなり、図12および図13に示すように、平面から見た形状が全体として略矩形状を呈しており、その両短辺24aおよび24bから略等しい位置(中心位置)に略H字状の貫通された空隙部31が形成されている。また、ゲージベース24には、両長辺24cおよび24dから略等しい位置(この場合、中心位置)に空隙部31を挟んで両長辺24cおよび24dに平行に、即ち、棒状変位計4の中心軸方向に延びる断面U字状または半円形状の溝32aおよび32bが形成されている。
【0035】
さらに、ゲージベース24には、他の部分の厚さ(例えば、0.6mm)に比べてその厚さが薄い(例えば、0.2mm)薄肉部33a、33b、34a〜34dが形成されている。薄肉部33aおよび33bは、H字状を呈する空隙部31を挟んでゲージベース24の両長辺24cおよび24dに沿うように略同一の幅をもって一対のクランク状を呈するように形成されている。即ち、薄肉部33aおよび33bには、それぞれ切欠部33a1および33b1が形成されている。薄肉部33aおよび33bがこのような形状を呈しているのは、薄肉部33aおよび33bの剛性を低下させ、鋼材などの測定対象物(図示略)のひずみを拘束しないように、即ち、ひずみに応じてゲージベース24を変形し易くするためである。一方、薄肉部34aおよび34bは、ゲージベース24の短辺24aから略等距離であって、溝32aを挟んで線対称の位置に略矩形状を呈して形成されている。同様に、薄肉部34cおよび34dは、ゲージベース24の短辺24bから略等距離であって、溝32bを挟んで線対称の位置に略矩形状を呈して形成されている。薄肉部34a〜34dがこのような形状を呈しているのは、後述するスポット溶接を容易にさせるためである。
【0036】
上記構成のゲージベース24は、図11に示すように、起歪部23の基部23a上に長円孔23dを塞ぐように載置された後、図11の薄肉部34a〜34d内においてそれぞれ3個の黒丸で示すように、例えば、スポット溶接により起歪部23の基部23a上に固定される。尚、ゲージベース24と起歪部23の基部23aとを固定するための溶着には、種々の形態を採用することができ、本実施の形態のスポット溶接の他、接着剤による接着、さらに、ガス圧接のような圧接のみならず、種々の融着およびろう付け技術等で両者を固定することが可能である。また、その一部にFBGセンサ25が形成された光ファイバ28は、図11に示すように、起歪部23の壁部23b1および23b2に形成された孔23b11と孔23b21との間に挿通された後、図11および図13に示すように、FBGセンサ25が空隙部31に位置するように、溝32aおよび32bに嵌入され、例えば、接着剤により溝32aおよび32bに固定される。そして、図9に示すように、起歪部23の庇部23c1に形成された孔23c11に引張ばね22のフック22bが架けられると共に、起歪部23の庇部23c2に形成された孔23c21に第2のシャフト19の孔19bとの間でフック30が架けられることにより、検出部65がパイプB12、パイプC13およびパイプD14の内部空間に保持されることになる。
【0037】
FBGセンサ25は、上記したように、例えば、光ファイバ28の一部に紫外のレーザ光を照射することにより作製される。FBGセンサ25において、グレーティング長は3〜10mm、グレーティング周期Λは500nmである。尚、ここで、パイプA11を「第1のパイプ」と称し、パイプB12、パイプC12、パイプD14を「第2のパイプ」と総称する。即ち、パイプA〜パイプDは、組立前には4本のパイプからなるが、組立後はパイプB、パイプCおよびパイプDは溶接により一体化され、軸方向への摺動は、実質的に、上記定義した第1のパイプと第2のパイプの間で行われる。
第2のシャフト19の一端19aは、直方体状(扁平板状)に形成されていると共に、フック30が架けられる孔19bが形成されている。第2のシャフト19の外周には、その他端19cから第2のシャフト19の略中央部まで、所定形状の雄ねじ19dが螺旋状に所定ピッチで形成されている。固定ブッシュ26は、例えば、ステンレス(SUS303)等からなり、略円盤状を呈している。固定ブッシュ26の略中央部には、第2のシャフト19が嵌合する孔26aが形成されている。固定ブッシュ26の起歪部23に対向する面とは反端側の面の孔26aの周縁部には、ナット27の凸球面加工された一端27aに対応して凹球面加工が施されている。
【0038】
固定ブッシュ26には、図9に示すように、孔26aを挟んで対称となる位置に、光ファイバ28が挿入される2つの孔26bおよび26cが形成されている。ナット27は、例えば、ステンレス(SUS303)からなり、略円筒状を呈しており、内周には第2のシャフト19の雄ねじ19dに螺合するための所定形状の雌ねじが螺旋状に所定ピッチで形成されている。第1および第2のシャフト18および19、引張ばね22、固定ブッシュ26およびナット27は、パイプC13の内部空間に保持された検出部65に対して所定のプリテンションを加え且つ調整するためのものである。即ち、ナット27を右回転または左回転させることにより、第2のシャフト19が軸方向に移動し、引張ばね22の付勢力が変化し検出部65に加えられるプリテンションが調整されるのである。パイプC13とパイプD14とは、例えば、組立後に溶接等により接合され、固定ブッシュ26は、パイプC13とパイプD14との接合部近傍の内部で固定される。光ファイバ28は、例えば、石英ガラスからなり、その一端がコネクタ29の第1の入力端に接続され、パイプD14内を通過した後、固定ブッシュ26の孔26bを経てパイプC13内に入る。パイプC13内に入った光ファイバ28は、パイプC13内を通過し、ベアリング保持具21の孔21bを経てパイプB12内に入った後、折り返してベアリング保持具21の孔21cを経て再びパイプC13内に入る。
【0039】
パイプC13内に再び入った光ファイバ28は、起歪部23に固定された後、固定ブッシュ26の孔26cを経てパイプD14内に入り、その他端がコネクタ29の出力端で中継用の光ファイバ5に接続される。光ファイバ28は、棒状変位計4の内部において光信号を伝送する。コネクタ29には、光ファイバ5がそれぞれ接続される。棒状変位計4は、上記構造を有しているので、変位を計測すべき棒状変位計4の軸方向に対しては低反力で伸縮するが、軸方向以外に対しては大きな曲げ剛性を有しているので、軸方向に圧縮した際の座屈が確実に防止される。
次に、上記構成のトンネル内空変位計測システムのトンネルへの設置の一例について図14および図15を参照して説明する。まず、図14に示すように、トンネルの半円弧状の覆工(内壁)41に支柱421〜429を植設する。この支柱421〜429は、なるべく覆工41が形成する円弧に垂直に設置することが望ましいが、多少傾いて設置されても良い。支柱421〜429は、例えば、帯鋼(SS400)からなり、略矩形状を呈している。これらの支柱42は、基端および先端近傍に取付座板51を取り付けるための孔が1つずつ形成され、それぞれリーマ仕上げが施されている。
【0040】
次に、図14に示すように、図1に示す第1系統の測定系を構成する棒状変位計411〜413および414〜416が支柱421と支柱422との間および支柱422と支柱423との間に、そして、図1に示す第2系統の測定系を構成する棒状変位計421〜423および424〜426が支柱423と支柱424との間および支柱424と支柱425との間に、そして、図1に示す第3系統の測定系を構成する棒状変位計431〜433および434〜436が支柱425と支柱426との間および支柱426と支柱427との間に、そして、図1に示す第4系統の測定系を構成する棒状変位計441〜443および444〜446が支柱427と支柱428との間および支柱428と支柱429との間に、それぞれトラス(truss)構造を構成するように取り付けられる。即ち、第1系統の測定系においては、支柱421〜423がトラス構造の垂直材(構造力学の分野においては「束材」と称している。)、支柱421および422の基端部近傍側の棒状変位計411および416がトラス構造の上弦材、支柱421および422の先端部近傍側(即ち、覆工41に遠い側)の棒状変位計413および414がトラス構造の下弦材、支柱421の先端と支柱422の基端との間および支柱422の基端と支柱423の先端との間にそれぞれ連結される棒状変位計412および415がトラス構造の斜材をそれぞれ構成している。
【0041】
同様に、第2系統の測定系においては、支柱423〜425がトラス構造の束材、棒状変位計421および426がトラス構造の上弦材、棒状変位計423および424がトラス構造の下弦材、棒状変位計422および425がトラス構造の斜材をそれぞれ構成している。第3系統の測定系においては、支柱425〜427がトラス構造の束材、棒状変位計431および436がトラス構造の上弦材、棒状変位計433および434がトラス構造の下弦材、棒状変位計432および435がトラス構造の斜材をそれぞれ構成している。第4系統の測定系においては、支柱427〜429がトラス構造の束材、棒状変位計441および446がトラス構造の上弦材、棒状変位計443および444がトラス構造の下弦材、棒状変位計442および445がトラス構造の斜材をそれぞれ構成している。以上説明したトラス構造の上弦材をなす棒状変位計411、416、421、426、431、436、441および446を第1の棒状変位計と称し、同様に、トラス構造の下弦材をなす棒状変位計413、414、423、424、433、434、443および444を第2の棒状変位計と称し、トラス構造の斜材をなす棒状変位計412、415、422、425、432、435、442および445を第3の棒状変位計と称する。
【0042】
次に、棒状変位計4の設置方法および光ファイバ5の接続方法の詳細について、図14に破線でもって示す楕円Aの部分を例にとって説明する。図15は、図14の楕円Aの部分の拡大図である。尚、楕円Aの部分において覆工41は湾曲しているが、図15では説明を簡単にするために覆工41の一部を平面状のものと仮定して表している。棒状変位計4は、支柱42に取付座板51および取付具52により設置する。取付座板51は、例えば、帯鋼(SS400)からなり、略矩形状を呈している。この取付座板51は、一端近傍に当該取付座板51を支柱42に取り付けるための孔が形成され、リーマ仕上げが施されていると共に、他端近傍に棒状変位計4を取付具52により取り付けるための2つの孔が形成されている。この2つの孔の内周には所定形状の雌ねじが螺旋状に所定ピッチで形成されている。一方、取付具52は、例えば、ステンレス(SUS303)からなり、全体として略直方体状を呈している。この取付具52は、その略中央部にU字状の切欠部が形成されていると共に、切欠部の両側には棒状変位計4を当該取付具52を介して取付座板51に取り付けるために、2本のボルトが挿入される2つの孔が形成されている。2本のボルトの外周には、その一端から所定位置まで、取付座板51の2つの孔に形成された雌ねじに螺合するための所定形状の雄ねじが螺旋状に所定ピッチで形成されている。
【0043】
まず、各棒状変位計411〜416の両端に取付具52および2本のボルトにより取付座板51を取り付ける。次に、支柱421の覆工41側の基端近傍に、棒状変位計411の一端に取り付けられた取付座板5111を、図15において、棒状変位計411の一端の取付面が紙面の奥側に向いた状態で支柱421に対して紙面の手前側に配置して、支柱421に外ねじ式ストリッパボルト(リーマボルト)とナットで相対的に回動自在に連結する。一方、支柱421の先端近傍に、棒状変位計413の一端に取り付けられた取付座板5131を、図15において、棒状変位計413の一端の取付面が紙面の奥側に向いた状態で支柱421に対して紙面の手前側に配置し、かつ、棒状変位計412の一端に取り付けられた取付座板5121を、棒状変位計412の一端の取付面が紙面の手前側に向いた状態で上記取付座板5131に重ねて配置して、支柱421に外ねじ式ストリッパボルトとナットで相対的に回動自在に連結する。
【0044】
図15において、支柱422の覆工41側の基端近傍に、棒状変位計411の他端に取り付けられた取付座板5112を、棒状変位計411の他端の取付面が紙面の奥側に向いた状態で支柱422に対して紙面の手前側に配置し、また、棒状変位計412の他端に取り付けられた取付座板5122を、棒状変位計412の他端の取付面が紙面の手前側に向いた状態で上記取付座板5112に重ねて配置すると共に、棒状変位計416の一端に取り付けられた取付座板5161を、棒状変位計416の一端の取付面が紙面の手前側に向いた状態で支柱422に対して紙面の奥側に配置し、また棒状変位計415の一端に取り付けられた取付座板5151を、棒状変位計415の一端の取付面が紙面の奥側に向いた状態で上記取付座板5161に重ねて配置して、支柱422に外ねじ式ストリッパボルトとナットで相対的に回動自在に連結する。一方、図15において、支柱422の先端近傍に、棒状変位計413の他端に取り付けられた取付座板5132を、棒状変位計413の他端の取付面が紙面の奥側に向いた状態で支柱422に対して紙面の手前側に配置し、かつ、棒状変位計414の一端に取り付けられた取付座板5141を、棒状変位計441の一端の取付面が紙面の手前側に向いた状態で支柱422に対して紙面の奥側に配置して、支柱422に外ねじ式ストリッパボルトとナットで相対的に回動自在に連結する。
【0045】
以下、第2〜第4系統の測定系についても同様に行う。以上説明した設置方法を採用することにより、各棒状変位計411〜416、421〜426、431〜436および441〜446は、支柱421〜423、423〜425、425〜427および427〜429の面に対して平行に設置されると共に、支柱421〜429と取付座板51を介してピン結合されることになり、軸方向にのみ力が加わることになる。
次に、図1に示す光スイッチ3の第1の入出力端T1と、第1系統を構成する棒状変位計411〜416および光ファイバ5との接続方法について、図15を参照して説明する。図1に示す光スイッチ3の第1の入出力端T1は、図15に示す光ファイバ51を介して棒状変位計411の第1の入出力端に接続し、棒状変位計411の第2の入出力端は、光ファイバ52を介して棒状変位計412の第1の入出力端に接続する。棒状変位計412の第2の入出力端は、光ファイバ53を介して棒状変位計413の第1の入出力端に接続し、棒状変位計413の第2の入出力端は、光ファイバ54を介して棒状変位計414の第1の入出力端に接続する。棒状変位計414の第2の入出力端は、光ファイバ55を介して棒状変位計415の第1の入出力端に接続し、棒状変位計415の第2の入出力端は、光ファイバ56を介して棒状変位計416の第1の入出力端に接続する。棒状変位計416の第2の入出力端は、光ファイバ57に接続する。
【0046】
次に、上記構成のトンネル内空変位計測システムの計測原理について説明する。この実施の形態1におけるトンネル内空変位計測システムは、上記したように設置したトラス構造の上弦材、下弦材および斜材を構成する棒状変位計4に生じるひずみを検出することによりトンネル内空(覆工)の変状を計測するものである。即ち、トンネル内空の変位をトラス節点の座標変化として検出する。トラス節点変化は、トラスの辺長変化余弦定理を用いて計算する。トラスの辺長変化余弦定理は、トンネルの下端部の2点を不動点(既知の2節点)と仮定し、この既知の2節点の変位から順次、相対する変位計の長さ(辺長)から2辺の交点(各トラスの節点座標)を連続的に算出することにより、トンネル全体の変状を測定するものである。既知の2節点は、図14および図15では、例えば、トンネルの左下端部の点a(Xa,Ya)およびb(Xb,Yb)とする。
以下、トラスの辺長変化余弦定理について説明する。図16に示すように、既知の2節点の座標をa(Xa,Ya)およびb(Xb,Yb)とし、求める未知の節点の座標をc(X,Y)、角度∠baxをθa、角度∠cabをAとする。また、図16に示す三角形abcが変形する前の各辺の長さをla、lbおよびlc、三角形abcが変形した後の各辺の長さをLa、LbおよびLcとすると、接点cの座標Xおよび座標Yは、それぞれ式(3)および式(4)で表される。
【0047】
X=Xa+Lbcos(θa+A) ・・・(3)
Y=Ya+Lbsin(θa+A) ・・・(4)
三角形abcの各辺のひずみをεa、εb、εcとすると、三角形abcが変形した後の各辺の長さLa、LbおよびLcは、式(5)〜式(7)のように表される。
La=la(1+εa) ・・・(5)
Lb=lb(1+εb) ・・・(6)
Lc=lc(1+εc) ・・・(7)
また、角度θaおよび角度Aは、式(8)および式(9)で表される。
【0048】
【数1】
【0049】
【数2】
【0050】
したがって、式(5)〜式(9)を式(3)および式(4)に代入すると、接点cの座標Xおよび座標Yはそれぞれ式(10)および式(11)で表される。
【0051】
【数3】
【0052】
【数4】
【0053】
以下、図16に示す未知の節点の座標d(Xd,Yd)やその他の未知の節点の座標についても上記した方法と同様な方法により順次求めることができる。
次に、上記構成のトンネル内空変位計測システムの動作について説明する。図1、図14および図15に示す設置状態において、図14に矢印で示すように、覆工41の天端に力が加えられ、支柱425に変位が生じたとする。これにより、トラス構造の上弦材たる棒状変位計411、416、421、426、431、436、441、446、下弦材たる棒状変位計413、414、423、424、433、434、443、444および斜材たる棒状変位計412、415、422、425、432、435、442、445において、上記変位およびそれぞれの設置場所に応じた軸方向のひずみが生じる。したがって、各棒状変位計4を構成するゲージベース24が当該ひずみに応じて引っ張られまたは圧縮される。この結果、各ゲージベース24の空隙部31の間隔が、引っ張りの場合には増加し、圧縮の場合には減少する。そして、空隙部31の間隔が増減することによりゲージベース24の溝32aと32bに固着保持されたFBGセンサ25にひずみが加えられる。この際、ある棒状変位計4において、棒状変位計4を軸方向に圧縮する変位が加えられたとしても、第1のパイプたるパイプA11に形成された摺動部11cの外周全体が第2のパイプたるパイプB12の内周を摺動すると共に、パイプA11の他端11bに取り付けられた第1のシャフト18がパイプB12とパイプC13との接合部に取り付けられたリニアベアリング20内を摺動するので、軸方向に対しては低反力で伸縮し、座屈が防止される。
【0054】
尚、上述したように、パイプB12、パイプC13、パイプD14は、溶接により一体化されているので、これらを第2のパイプと総称しているが、結局は、第1のパイプと第2のパイプとの間における相対摺動量に対応したひずみが、ゲージベース24の空隙部31の間隔を変化させることになる。
このような状態において、トンネル内空変位計測システムの光源1は、ピーク波長λ1〜λ6を含む広帯域の波長帯域幅を有し、光強度の大きい光信号を連続で出射する。一方、制御装置8の制御部は、光スイッチ3に対して共通入出力端Tcと第1の入出力端T1とを接続するための切替信号を供給する。これにより、光スイッチ3は、光源1から出射され光サーキュレータ2を経て共通入出力端Tcから入射された光信号を第1の入出力端T1から出射して第1系統の計測系を構成する光ファイバ51(図15参照)の入力端に入射する。光ファイバ51に入射された光信号は、光ファイバ51内を伝送された後、棒状変位計411を構成する光ファイバ28内に入射され、対応するFBGセンサ25においてコア63の屈折率nおよび当該FBGセンサ25固有のグレーティング周期Λに応じたブラッグ波長(ピーク波長λ1)を有する反射光が反射され、残りの波長領域の光が透過し、光ファイバ52内に入射される。
【0055】
棒状変位計411を構成するFBGセンサ25において反射されたピーク波長λ1を有する光信号は、光ファイバ51内を伝送された後、光スイッチ3および光サーキュレータ2を経て波長計7に入射される。以下、光ファイバ52に入射された光信号のうち、各棒状変位計412〜416を構成するFBGセンサ25のコア63の屈折率nおよび当該FBGセンサ25固有のグレーティング周期Λに応じたブラッグ波長(ピーク波長λ2〜λ6)を有する光信号は、対応するFBGセンサ25で反射され、逆の経路を伝送された後、光スイッチ3および光サーキュレータ2を経て波長計7に入射される。
一方、光ファイバ52に入射された光信号のうち、各FBGセンサ25で反射されなかった光信号は、棒状変位計412内の光ファイバ28およびFBGセンサ25、光ファイバ53、棒状変位計413内の光ファイバ28およびFBGセンサ25、光ファイバ54、棒状変位計414内の光ファイバ28およびFBGセンサ25、光ファイバ55、棒状変位計415内の光ファイバ28およびFBGセンサ25、光ファイバ56、棒状変位計416内の光ファイバ28およびFBGセンサ25、光ファイバ57内を順次伝送され、光ファイバ57の出力端から出射される。各FBGセンサ25において光信号が反射される際には、上記したように、各FBGセンサ25にひずみが加えられており、グレーティング周期Λが変化しているので、各FBGセンサ25からの反射光のブラッグ波長のピーク波長λ1〜λ6が変化している(図7参照)。
【0056】
したがって、波長計7は、光サーキュレータ2から供給された光信号における複数のブラッグ波長の変化しているピーク波長λ1〜λ6を検出して制御装置8に供給する。これにより、制御装置8の制御部は、波長計7から供給された複数のブラッグ波長のピーク波長を物理量(例えば、力、変位等)に変換し、得られた物理量を記憶部に記憶する。
次に、制御装置8の制御部は、第2系統の計測系からのデータを収集するために、光スイッチ3に対して共通入出力端Tcと第2の入出力端T2とを接続するための切替信号を供給する。これにより、光スイッチ3は、光源1から出射され光サーキュレータ2を経て共通入出力端Tcから入射された光信号を第2の入出力端T2から出射して第2系統の計測系を構成する光ファイバ5の入力端に入射する。この後は、上記した第1系統の計測系と同様に、各棒状変位計421〜426を構成するFBGセンサ25において光信号の反射および透過が行われる。したがって、波長計7からは第2系統の計測系に関する複数のブラッグ波長のピーク波長が供給されるので、制御装置8の制御部は、当該第2系統の計測系に関する複数のブラッグ波長のピーク波長を物理量に変換し、得られた物理量を記憶部に記憶する。以下、上記処理と同様の処理を順次繰り返すことにより、制御装置8の制御部は、第3系統の計測系および第4系統の計測系からのデータを収集する。この後、制御装置8の制御部は、収集した第1〜第4系統の計測系のデータに基づいて、上記したトラスの辺長変化余弦定理によりトンネルの変位を測定する。
【0057】
ここで、図17に実験結果の一例を示す。トンネル模型を内径8000mmの半円弧状のH型鋼(100×100×6×8)で作製し、油圧ジャッキで天端に最大60mmの強制変位を与える負荷を加えた。トンネル模型の内側の各節点座標には、図14に示すX方向およびY方向に変位計を設置し、トンネル内空変位計測システムの精度検証を行った。尚、トンネル内空変位計測システムの設置範囲は、トンネル模型の対象性を考慮して1/4円とした。図17において、初期座標とは、変位を与える前の各節点座標を意味し、変位計節点座標とは、変位を与えた後の各節点座標を変位計で計測した各接点座標を意味し、システム算出座標とは、収集されたデータに基づいて制御装置8の制御部が上記したトラスの辺長変化余弦定理により算出した座標を意味している。図17から分かるように、変位計の計測結果と良く一致している。
このように、本実施の形態1によれば、支柱421〜429を覆工41に取り付け、引張ひずみおよび圧縮ひずみの測定が可能な棒状変位計4を支柱421〜429の基端および先端にそれぞれ連結しているので、トンネル断面の巨視的な内空変位について、引張ひずみだけでなく圧縮ひずみの測定も可能である。
【0058】
また、検出感度の比較的高いFBGセンサ25を用いているので、測定対象物がひずみの大きい鉄の場合は勿論、ひずみの小さいコンクリートの場合でも、高精度な検出が可能であると共に、束材としての支柱42の長さを短くすることができる。各棒状変位計4ごとにプリテンションを与えていると共に、摺動部11cを設けているので、このトンネル内空変位計測システムをトンネルに設置する際に各棒状変位計4の摺動部に所定のプリテンション(変位)を与えることにより、引張ひずみだけでなく圧縮ひずみも測定することができると共に、棒状変位計の座屈を防止することができる。例えば、0〜40mmの可動範囲がある場合には、±20mmの引張ひずみおよび圧縮ひずみを高精度で測定することができ、実用上十分な計測精度が得られる。さらに、本実施の形態1によれば、トンネルの地山または覆工の表面に設置する構造であると共に、複雑な機構を必要としないため、後施工が可能であり、設置後のメンテナンスも容易である。例えば、ある棒状変位計4に何らかの原因で不具合が発生した場合であっても、当該棒状変位計4だけを取り替えれば良い。1つの系統に6本の棒状変位計4が接続可能であるので、光ファイバの収まりが良い。また、棒状変位計4は、軸方向以外は大きな曲げ剛性を有しているので、支柱421〜429から棒状変位計4に変位が正確に伝わり、またトンネル内を列車や自動車等の車両が走行した場合であっても、風圧等による影響を受けにくい。 さらに、低反力で軸方向に伸縮する棒状変位計4と支柱421〜429とをピン結合によりトラス構造としているので、面内の角変形および座屈等の面外変形に伴う測定誤差(端部の曲げによる干渉)および機能上の不具合(破損やかじり)を回避することができる。さらに、各棒状変位計4の最大予想変位を想定し任意の可動範囲の棒状変位計4を設計することができるため、設計の自由度が大きいと共に、破損等の不具合を防止することができる。
【0059】
実施の形態2.
上述した実施の形態1では、トンネル内空変位の検出に、起歪部23と、ゲージベース24と、FBGセンサ25とからなる検出部65(図11参照)を用いる例を示したが、本発明は、これに限定されるものではない。例えば、本発明は、トンネル内空変位の検出にひずみゲージを有する検出部を用いても良い。図18は、本発明の実施の形態2に係るトンネル内空変位計測システムを構成する検出部71の構成を示している。この例の検出部71は、起歪板72と、ひずみゲージ73および74とから構成されている。
起歪板72は、例えば、ステンレス(SUS630)等からなり、図18に示すように、横長矩形状を呈する起歪板72の中間部には、短辺方向からくびれを呈した起歪部721が形成され、両端側には、幅広の保持部722および723が形成されている。起歪板72の起歪部721の表面72aに、図18(a)に示すように、ひずみゲージ73が接着、蒸着、融着、スパッタリングその他の手段により添着され、起歪部721の裏面72bに、図18(b)に示すように、ひずみゲージ74が同様に添着されている。一方の保持部722の端部略中央部には、図9に示す引張ばね22のフック22bが架けられる孔7221が形成され、他方の保持部723の端部略中央部には、図9に示す第2のシャフト19の一端19aに形成された孔19bとの間でフック30が架けられる孔7231が形成されている。
【0060】
起歪板72がこのような形状を呈しているのは、起歪部721の剛性を低下させ、測定対象物(図示略)の共同を拘束せずに起歪部721を変形し易くするためである。ひずみゲージ73および74は、4ゲージ法測定モードの8線式であり、ポリイミド系樹脂のフィルムからなるゲージベース上に、厚さ数μmを有し、銅・ニッケル系合金またはニッケル・クロム系合金からなり、蛇行状の抵抗箔(ゲージ抵抗)R1〜R4が接着されて構成されている。起歪部721の表面72aおよび裏面72bにひずみゲージ73および74を添着するのは、起歪部721に加えられたひずみにより起歪部721が湾曲した場合にその湾曲成分を相殺するためであるが、片面にのみ添着するようにしても良い。ゲージ抵抗R1〜R4により図19に示すように、ブリッジ回路を構成すると共に、ゲージ抵抗R1とゲージ抵抗R4との接続点と、ゲージ抵抗R2とゲージ抵抗R3との接続点との間にブリッジ電源により電圧Eを印加すると、式(12)で表される、4個のゲージ抵抗R1〜R4にそれぞれ加えられたひずみε1〜ε4の大きさおよび極性に応じたブリッジの出力電圧eoが得られる。
【0061】
e0=(Ks/4)・(ε1−ε2+ε3−ε4)・E ・・・(12)
式(12)において、Ksは4個のゲージ抵抗R1〜R4が等しいと仮定されたゲージ率である。
上記構成の検出部71は、図9に示す検出部65に換えて、起歪板72の端部722に形成された孔7221に引張ばね22のフック22bが架けられると共に、起歪板72の端部723に形成された孔7231に第2のシャフト19の孔19bとの間でフック30が架けられることにより、検出部71がパイプC13の内部空間に保持される。この場合、図9に示す光ファイバ28に換えて、ひずみゲージ73および74の各端子にそれぞれ接続されるケーブルが固定ブッシュ26の孔26bおよび26cと、ベアリング保持具21の孔21bおよび21cとに順次挿入され、図8に示すコネクタに接続される。また、各棒状変位計間も光ファイバ5および光コネクタ6ではなくケーブルで接続される。さらに、光源1、光サーキュレータ2、光スイッチ3、波長計7に換えて、ブリッジ電源、スキャナ、データロガー等が設けられる。
このように、本実施の形態2によれば、検出感度の比較的高いひずみゲージを用いているので、上記した実施の形態1の場合と略同様の効果が得られる。
【0062】
以上、この実施の形態を図面を参照して詳述してきたが、本発明は、この実施の形態に限られるものではなく、本発明の要旨を逸脱しない範囲で種々の設計の変更等が可能である。
例えば、上述した各実施の形態では、パイプA11〜D14は、略円筒状である例を示したが、これに限定されない。例えば、パイプA11〜D14は、略角筒状であっても良い。また、上述した各実施の形態では、パイプA11の他端11bの近傍の外周に形成された摺動部11cがパイプB12の一端12aの近傍の内周に摺動可能に嵌合する例を示したが、これに限定されず、パイプA11の他端11bの近傍の内周に形成された摺動部がパイプB12の一端12aの近傍の外周に摺動可能に嵌合するように構成しても良い。
また、上述した各実施の形態では、パイプ12〜14は、別個に設けられる例を示したが、これに限定されず、組立てが可能であれば一体に形成しても良い。また、上述した各実施の形態では、検出部は引張ばね22を介して第1のシャフト18に取り付けられる例を示したが、これに限定されず、検出部は直接第1のシャフト18に取り付けても良いし、第2のシャフト19にも引張ばねを介して取り付けても良い。
また、上述した実施の形態1では、起歪部23は、基部23aと、壁部23b1および23b2と、庇部23c1および23c2とが一体に形成されて構成されている例を示したが、これに限定されず、起歪部は、基部23aのみからなり、その両端に係止部をなす孔がそれぞれ形成されているとしても良い。
【図面の簡単な説明】
【0063】
【図1】本発明の実施の形態1に係るトンネル内空変位計測システムの構成を示すシステム構成図である。
【図2】FBGセンサの構成を模式的に示す概念図である。
【図3】FBGセンサの動作原理を模式的に示す概念図である。
【図4】FBGセンサの動作原理を模式的に示す概念図である。
【図5】FBGセンサの多点計測原理を模式的に示す概念図である。
【図6】FBGセンサの多点計測原理を模式的に示す概念図である。
【図7】FBGセンサの多点計測原理を模式的に示す概念図である。
【図8】本発明の実施の形態1に係る棒状変位計の構成の一例を示す断面図である。
【図9】図8に示す棒状変位計の一部の構成を示す分解斜視図である。
【図10】図8に示す棒状変位計の一部の構成を示す透視斜視図である。
【図11】図8に示す棒状変位計に用いられる検出部の構成を示す斜視図である。
【図12】図11に示す検出部を構成するゲージベースの平面図である。
【図13】図12に示すゲージベースにFBGを取り付けた状態を示す平面図である。
【図14】図1のトンネル内空変位計測システムをトンネルに設置した一例を示す概念図である。
【図15】図14の破線Aで囲んだ部分の拡大図である。
【図16】トラスの辺長変化余弦定理を説明するための概念図である。
【図17】図1の本発明の実施の形態1に係るトンネル内空変位計測システムの模擬的実験結果の一例を示す図である。
【図18】本発明の実施の形態2に係るトンネル内空変位計測システムの一部を構成する検出部の構成を示すもので、(a)は、表面を示す平面図、(b)は、その裏面を示す底面図である。
【図19】図18に示すひずみゲージでもってホイートストンブリッジを構成してなる回路図である。
【符号の説明】
【0064】
1 光源
2 光サーキュレータ
3 光スイッチ
4,411〜416,421〜426,431〜436,441〜446 棒状変位計
5,51〜57,62 光ファイバ
6 光コネクタ
7 波長計
8 制御装置
A11 パイプ(第1のパイプ)
B12〜D14 パイプ(第2のパイプ)
11a,12a,19a,27a 一端
11b,12b,18a,19c 他端
11c 摺動部
15 エンドプレート
16 Oリング
17 Oリング保持具
17a,32a,32b 溝
17b 雌ねじ穴
18b,19b,21a〜21c,26a〜26c,23b11,23b21,23c11,23c21,7221,7231 孔
18,19 シャフト
19d ねじ山
20 リニアベアリング
21 ベアリング保持具
22 引張ばね
22a,22b,30 フック
23,72 起歪部
23a 基部
23b1,23b2 壁部
23c1,23c2 庇部
23d 長円孔
24 ゲージベース
24a,24b 短辺
24c,24d 長辺
25,61 FBGセンサ
26 固定ブッシュ
27 ナット
28 光ファイバ
29 コネクタ
31 空隙部
33a,33b,34a〜34d 薄肉部
33a1,33b1 切欠部
41 覆工
421〜429 支柱
51,5111,5112,5121,5122,5131,5132,5141,5151,5161 取付座板
52 取付具
63 コア
65,71 検出部
721 中央部
722,723 保持部
72a 表面
72b 裏面
73,74 ひずみゲージ
【特許請求の範囲】
【請求項1】
トンネルの内壁に植設されトラス構造の束材をなす剛性大なる複数の支柱と、
隣接する前記支柱の基端部に各端部がピン結合され前記トラス構造の上弦材をなす複数の伸縮可能な第1の棒状変位計と、
隣接する前記支柱の先端部に各端部がピン結合され前記トラス構造の下弦材をなす複数の伸縮可能な第2の棒状変位計と、
隣接する前記支柱の基端部と先端部に各端部がピン結合され前記トラス構造の斜材をなす複数の伸縮可能な第3の棒状変位計と、
前記複数の第1〜第3の棒状変位計から出力される軸方向の変位に応じた信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定する制御装置と
を具備することを特徴とするトンネル内空変位計測システム。
【請求項2】
前記第1〜第3の棒状変位計は、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられた第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持された検出部と
を有することを特徴とする請求項1記載のトンネル内空変位計測システム。
【請求項3】
前記第1のシャフトは、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成されていることを特徴とする請求項2に記載のトンネル内空変位計測システム。
【請求項4】
前記検出部は、前記第1のシャフトまたは前記第2のシャフトのいずれか一方または両方に引張ばねを介して支持されることを特徴とする請求項2または請求項3に記載のトンネル内空変位計測システム。
【請求項5】
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられていることを特徴とする請求項2〜請求項4のうちのいずれか1項に記載のトンネル内空変位計測システム。
【請求項6】
前記検出部は、
両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、
空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、
前記溝に固定されて延びる光ファイバと、
前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサと
を有することを特徴とする請求項2〜請求項5のうちのいずれか1項に記載のトンネル内空変位計測システム。
【請求項7】
前記ゲージベースは、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成されていることを特徴とする請求項6に記載のトンネル内空変位計測システム。
【請求項8】
前記検出部は、
中央部がくびれた起歪部と、
前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージと
を有することを特徴とする請求項2〜請求項5のうちのいずれか1項に記載のトンネル内空変位計測システム。
【請求項9】
トンネルの内壁に剛性大なる複数の支柱をトラス構造の束材を構成するように植設し、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第1の棒状変位計の各端部を前記トラス構造の上弦材を構成するように隣接する前記支柱の基端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第2の棒状変位計の各端部を前記トラス構造の下弦材を構成するように隣接する前記支柱の先端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第3の棒状変位計の各端部を前記トラス構造の斜材を構成するように隣接する前記支柱の基端部と先端部にピン結合により取り付け、
前記複数の第1〜第3の棒状変位計からの信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定することを特徴とするトンネル内空変位計測方法。
【請求項10】
トンネルの内壁に設置され、その軸方向に加えられた変位を検出し、前記変位に応じた信号を出力するトンネル内空変位計であって、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられると共に、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成された第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に引張ばねを介して支持された検出部とを有し、
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられ、
前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有していることを特徴とするトンネル内空変位計。
【請求項11】
前記検出部に換えて、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有する検出部を有することを特徴とする請求項10記載のトンネル内空変位計。
【請求項1】
トンネルの内壁に植設されトラス構造の束材をなす剛性大なる複数の支柱と、
隣接する前記支柱の基端部に各端部がピン結合され前記トラス構造の上弦材をなす複数の伸縮可能な第1の棒状変位計と、
隣接する前記支柱の先端部に各端部がピン結合され前記トラス構造の下弦材をなす複数の伸縮可能な第2の棒状変位計と、
隣接する前記支柱の基端部と先端部に各端部がピン結合され前記トラス構造の斜材をなす複数の伸縮可能な第3の棒状変位計と、
前記複数の第1〜第3の棒状変位計から出力される軸方向の変位に応じた信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定する制御装置と
を具備することを特徴とするトンネル内空変位計測システム。
【請求項2】
前記第1〜第3の棒状変位計は、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられた第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持された検出部と
を有することを特徴とする請求項1記載のトンネル内空変位計測システム。
【請求項3】
前記第1のシャフトは、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成されていることを特徴とする請求項2に記載のトンネル内空変位計測システム。
【請求項4】
前記検出部は、前記第1のシャフトまたは前記第2のシャフトのいずれか一方または両方に引張ばねを介して支持されることを特徴とする請求項2または請求項3に記載のトンネル内空変位計測システム。
【請求項5】
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられていることを特徴とする請求項2〜請求項4のうちのいずれか1項に記載のトンネル内空変位計測システム。
【請求項6】
前記検出部は、
両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、
空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、
前記溝に固定されて延びる光ファイバと、
前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサと
を有することを特徴とする請求項2〜請求項5のうちのいずれか1項に記載のトンネル内空変位計測システム。
【請求項7】
前記ゲージベースは、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成されていることを特徴とする請求項6に記載のトンネル内空変位計測システム。
【請求項8】
前記検出部は、
中央部がくびれた起歪部と、
前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージと
を有することを特徴とする請求項2〜請求項5のうちのいずれか1項に記載のトンネル内空変位計測システム。
【請求項9】
トンネルの内壁に剛性大なる複数の支柱をトラス構造の束材を構成するように植設し、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第1の棒状変位計の各端部を前記トラス構造の上弦材を構成するように隣接する前記支柱の基端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第2の棒状変位計の各端部を前記トラス構造の下弦材を構成するように隣接する前記支柱の先端部にピン結合により取り付け、
軸方向の変位に応じた信号を出力する複数の伸縮可能な複数の第3の棒状変位計の各端部を前記トラス構造の斜材を構成するように隣接する前記支柱の基端部と先端部にピン結合により取り付け、
前記複数の第1〜第3の棒状変位計からの信号に基づいて、前記トンネルの下端部の2点を既知の2節点と仮定し、前記既知の2節点を基点として順次、相対する2つの前記棒状変位計の交点である節点座標を連続的に算出して前記トンネルの変状を測定することを特徴とするトンネル内空変位計測方法。
【請求項10】
トンネルの内壁に設置され、その軸方向に加えられた変位を検出し、前記変位に応じた信号を出力するトンネル内空変位計であって、
一端が閉塞された第1のパイプと、
前記第1のパイプの他端近傍の外周または内周に形成された摺動部が一端近傍の内周または外周に摺動可能に嵌合すると共に、他端が閉塞された第2のパイプと、
前記第1のパイプの前記他端側に一端が取り付けられると共に、前記第2のパイプ内に保持されたベアリング内を摺動可能に構成された第1のシャフトと、
前記第2のパイプ内に一端が取り付けられた第2のシャフトと、
前記第2のパイプ内の空間において前記第1のシャフトの他端と前記第2のシャフトの他端との間に引張ばねを介して支持された検出部とを有し、
前記第2のシャフトは、その一端部外周に雄ねじが形成され、ナットの回動に応じて前記検出部にプリテンションを付加可能に前記第2のパイプ内に取り付けられ、
前記検出部は、両端に前記第1のシャフトの他端と前記第2のシャフトの他端との間に支持されるための係止部を有すると共に、略中央部に長円孔が形成された起歪部と、空隙部と、前記空隙部を挟んで前記棒状変位計の軸方向に平行に延びる溝とが形成される共に、前記空隙部の前記軸方向に平行な周囲にその形状に沿って、他の部分の厚さに比べて厚さが薄い薄肉部が形成され、前記起歪部に前記長円孔を塞ぐように固定されたゲージベースと、前記溝に固定されて延びる光ファイバと、前記光ファイバの前記空隙部内に位置する部分に形成されたファイバ・ブラッグ・グレーティング・センサとを有していることを特徴とするトンネル内空変位計。
【請求項11】
前記検出部に換えて、中央部がくびれた起歪部と、前記起歪部の前記中央部の表面または裏面の少なくとも一面に添着されたひずみゲージとを有する検出部を有することを特徴とする請求項10記載のトンネル内空変位計。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2006−177822(P2006−177822A)
【公開日】平成18年7月6日(2006.7.6)
【国際特許分類】
【出願番号】特願2004−372348(P2004−372348)
【出願日】平成16年12月22日(2004.12.22)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成16年8月18日 社団法人土木学会発行の「第59回 年次学術講演会講演概要集」に発表
【出願人】(000003687)東京電力株式会社 (2,580)
【出願人】(000221546)東電設計株式会社 (44)
【出願人】(000201478)前田建設工業株式会社 (358)
【出願人】(000142067)株式会社共和電業 (52)
【Fターム(参考)】
【公開日】平成18年7月6日(2006.7.6)
【国際特許分類】
【出願日】平成16年12月22日(2004.12.22)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成16年8月18日 社団法人土木学会発行の「第59回 年次学術講演会講演概要集」に発表
【出願人】(000003687)東京電力株式会社 (2,580)
【出願人】(000221546)東電設計株式会社 (44)
【出願人】(000201478)前田建設工業株式会社 (358)
【出願人】(000142067)株式会社共和電業 (52)
【Fターム(参考)】
[ Back to top ]