
トンネル施工におけるサイクルタイム測定方法
【課題】トンネル掘削におけるサイクルタイムを精度良く自動的に取得する。
【解決手段】トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群2,3…によって無線通信ネットワーク1が構築され、前記無線ノード2と通信可能とされる管理用コンピュータ7が設置されるとともに、前記無線ノード群2,3…の交信ゾーン内において無線ノード3と相互に無線通信可能とされる移動無線端末4が各トンネル施工重機10〜17等に備えられ、移動無線端末4の自己ID情報から切羽前に位置しているトンネル施工重機の種別を検出し、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得する。
【解決手段】トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群2,3…によって無線通信ネットワーク1が構築され、前記無線ノード2と通信可能とされる管理用コンピュータ7が設置されるとともに、前記無線ノード群2,3…の交信ゾーン内において無線ノード3と相互に無線通信可能とされる移動無線端末4が各トンネル施工重機10〜17等に備えられ、移動無線端末4の自己ID情報から切羽前に位置しているトンネル施工重機の種別を検出し、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、サイクルタイム測定を精度良く自動的に行うようにしたトンネル施工におけるサイクルタイム測定方法に関する。
【背景技術】
【0002】
従来より、山岳トンネルの施工では、掘削方法の違いにより全断面掘削工法、上部半断面先進工法、ロングベンチカット工法、ショートベンチカット工法、ミニベンチカット工法等のベンチカット工法などが存在するが、トンネル掘削手順は、概ね穿孔、装薬、発破、ズリ出し、一次吹付け、支保工建込み、二次吹付け、ロックボルト打設の工程を順にかつ段階的に踏むことにより掘削が行われている。なお、支保工建込み、吹付けおよびロックボルト打設は、地山状況、トンネル施工方法および掘削方法等の違いによって省略されたり、順序が入れ替わることがある。
【0003】
上記トンネル施工では、工程管理の一環として、掘削サイクルタイムを測定している。この掘削サイクルタイムの測定は、専ら坑夫または現場職員等(以下、纏めて坑内作業員等という。)による記帳により成されていた。
【0004】
しかしながら、上記坑内作業員等の記帳による測定の場合には、トンネル切羽付近に一日中張り付いて施工を監視する必要があり、かつ1日の施工完了後にデータの整理に多くの時間と手間が掛かるなどの問題があった。また、職員は多忙の中、データ整理に終始せざるを得ないなど人員的にも非効率であった。さらに、毎日単調な作業の繰り返しになるため、記帳忘れ等により一部のデータに信頼性が欠けることがあり、データの整合性を取るために一部に手直しが必要となることも多々あった。
【0005】
他方、前記サイクルタイムは、本来、トンネル施工の経営分析にも直接的に関連性があり、工事費に及ぼす影響が大きい因子であるが、従来のように坑内作業員等が手作業により行っていたのでは、実際のフィードバックまで時間が掛かり過ぎるなどの問題があった。
【0006】
そこで近年は、トンネル施工におけるサイクルタイムを自動的に測定することが提案されている。例えば、下記特許文献1では、現場事務所内に工程管理用コンピュータを設備するとともに、トンネルの切羽近傍に集音マイクを配設し、前記工程管理用コンピュータには予めトンネル施工のために配置される施工重機毎にその発生音の解析データとともに、その音特性と重機種別とが関連付けられており、前記集音マイクによって捕集された音声の音声解析に基づいて重機種別を特定することにより、特定の作業が開始及び/又は終了したことを自動的に検出し、前記工程管理用コンピュータにおいて任意の形式でサイクルタイムが表示されるようにしたトンネル施工におけるサイクルタイム測定方法(従来法1)及び現場事務所内に工程管理用コンピュータを設備するとともに、トンネル施工のために配置される施工重機に稼働状況を検出するセンサーを取付け、前記施工重機の稼働状況から特定の作業が開始及び/又は終了したことを自動的に検出し、前記工程管理用コンピュータにおいて任意の形式でサイクルタイムが表示されるようにしたトンネル施工におけるサイクルタイム測定方法(従来法2)が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−138874号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、前記従来法1の集音マイクによって捕集された音声の音声解析に基づいて重機種別を特定する方法の場合は、解析結果の誤差が生じ易く重機種別の特定が困難であることがあるとともに、他の作業が輻輳する場合、重機発生音以外の音が多く捕集されると重機特定精度が低下するといった問題があった。
【0009】
また、前記従来法2は、具体的にはホイールジャンボに搭載された削孔装置の電動モータに電流・電圧センサーを取り付けたり、油圧機器などに圧力センサーを取付け、当該センサーによる検出によって施工重機に稼働状況から特定作業が開始及び/又は終了を検知するようにするものであるが、この場合も重機の稼働状況のみの判別では重機種別の特定が困難であったり、重機特定精度が低下するといった問題があった。
【0010】
そこで本発明の主たる課題は、サイクルタイム測定を精度良くかつ自動的に取得し得るようにすることにある。
【課題を解決するための手段】
【0011】
前記課題を解決するために請求項1に係る本発明として、トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群によって無線通信ネットワークが構築され、前記無線ノードと通信可能とされる管理用コンピュータが設置されるとともに、前記無線ノード群の交信ゾーン内において無線ノードと相互に無線通信可能とされる移動無線端末が各トンネル施工重機に備えられ、
前記移動無線端末は無線ノードに対して自己IDを送信するID情報送信機能を備えるとともに、前記管理用コンピュータによって、予め登録されている無線ノードの位置情報及び前記移動無線端末のID情報から切羽前に位置しているトンネル施工重機の種別を検出し、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得することを特徴とするトンネル施工におけるサイクルタイム測定方法が提供される。
【0012】
上記請求項1記載の発明では、トンネル坑内に構築された無線通信ネートワークとともに、無線ノード群の交信ゾーン内において無線ノードと相互に無線通信可能とされる移動無線端末が各トンネル施工重機に備えられる。前記移動無線端末は無線ノードに対して自己IDを送信するID情報送信機能を備え、前記管理用コンピュータによって、予め登録されている無線ノードの位置情報及び前記移動無線端末のID情報から切羽前に位置しているトンネル施工重機の種別を検出するようにする。
【0013】
一方、トンネル内には、削孔、装薬、支保工建込み、ロックボルト打設作業を行うためのホイールジャンボ、火薬運搬車、ズリ出しのためのホイールローダ、ずり運搬ダンプ、当たり取りのためのブレーカー、バックホウ、鋼製支保工建込みのためのエレクター、吹付け作業のための吹付けロボット、ミキサー車、ロックボルト打設作業のためのモルタル台車等、各種のトンネル施工重機が配置され、サイクル工程の工事種別に応じて、切羽前まで特定のトンネル施工重機が移動し、作業を行うこととなるため、トンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定すれば、サイクルタイムを自動的に取得することが可能となる。この方法の場合、切羽前に位置しているトンネル施工重機の種別については高い精度で判別することができるため、サイクルタイム測定を精度良く行うことが可能となる。
【0014】
請求項2に係る本発明として、前記トンネル切羽前に設置された無線ノードが受信する移動無線端末の自己ID情報から切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を取得するようにしてある請求項1記載のトンネル施工におけるサイクルタイム測定方法が提供される。
【0015】
上記請求項2記載の発明は、トンネル切羽前に設置された無線ノードが受信する移動無線端末の自己ID情報から切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を取得するものである。トンネル切羽前に位置するトンネル施工重機の種別及び配置パターンを検出する方法としては、トンネル坑内において移動するトンネル施工重機の位置を常時把握するようにした上で、切羽前に存在するトンネル施工重機を特定することも可能であるが、本請求項2に係る発明では、トンネル切羽前に存在しているトンネル施工重機のみが特定されれば良いため、トンネル切羽前に設置された無線ノードがどのID情報を受信するかで切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を簡易に取得するようにしたものである。
【0016】
請求項3に係る本発明として、前記工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更するようにしてある請求項1〜2いずれかに記載のトンネル施工におけるサイクルタイム測定方法が提供される。
【0017】
上記請求項3記載の発明は、前記工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更するようにしたものである。トンネル坑内での測量作業は、前記トンネル作業種別と密接に関係しており、トンネル作業種別に応じて各測量が行われるようになっているため、自動取得された工事種別の特定情報に基づいて、トータルステーションの作業モードを自動的に変更するようにすれば、測量作業の自動化に資するようになる。
【発明の効果】
【0018】
以上詳説のとおり本発明によれば、サイクルタイム測定を精度良く自動的に行えるようになる。また、工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更することで、トータルステーションによる測量作業の自動化にも資するようになる。
【図面の簡単な説明】
【0019】
【図1】本発明に係る無線通信ネットワーク1の概念図である。
【図2】そのシステム系統図である。
【図3】パーソナルエリアネットワークの構築手順(その1)の説明図である。
【図4】パーソナルエリアネットワークの構築手順(その2)の説明図である。
【図5】追加無線子局ノードのネットワークへの加入手順の説明図である。
【図6】(A)(B)は情報経路選択機能の説明図である。
【図7】(A)(B)は無線子局ノード3の配置要領図である。
【図8】管理用コンピュータ7のモニタ画面上でのサイクルタイム表示例を示す図である。
【図9】トンネル掘削のサイクル工程図である。
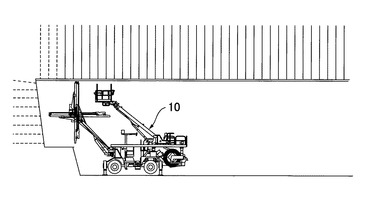
【図10】削孔作業状況図である。
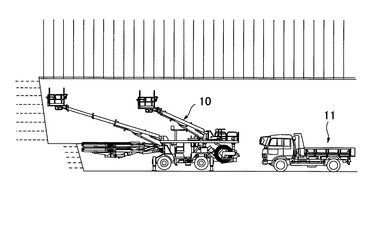
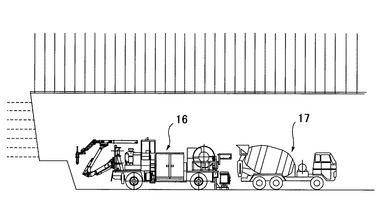
【図11】装薬作業状況図である。
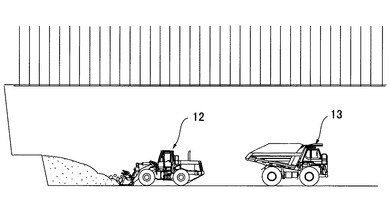
【図12】ズリ出し作業状況図である。
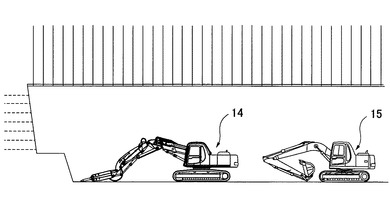
【図13】当り取り作業状況図である。
【図14】吹付け作業状況図である。
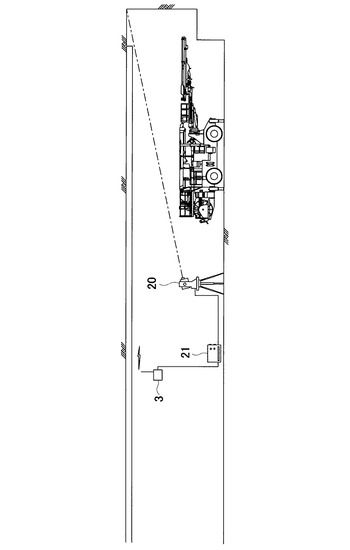
【図15】トータルステーション20による測量作業状況図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施の形態について図面を参照しながら詳述する。
【0021】
〔トンネル内の無線通信ネットワーク1の構築〕
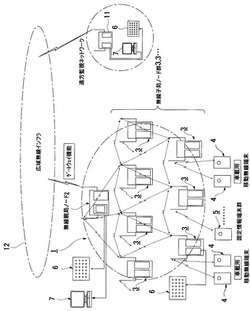
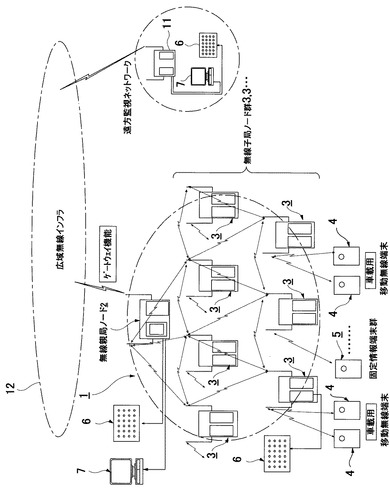
無線通信ネットワーク1は、具体的には図1に示されるように、トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群2、3…によって無線通信ネットワークが構築され、前記無線ノード2と通信可能とされる管理用コンピュータ7が設置されるとともに、前記無線ノード群の交信ゾーン内において無線ノード2,3…と相互に無線通信可能とされる移動無線端末4,4…が移動する各トンネル施工重機に備えられたものである。
【0022】
ここで、前記無線ノード群2,3…は、各無線ノード群の上位に位置し、統括的に管理・調整するコーディネート機能を備える少なくとも1つの無線ノード(以下、無線親局ノード2という。)と、それ以外の無線ノード(以下、無線子局ノード3という。)とから構成されている。
【0023】
以下、さらに具体的に詳述する。
【0024】
前記無線子局ノード3は、自律的に隣接する無線子局ノード3を検出し、無線通信可能なネットワークを構築する自己組織化機能と、隣接する少なくとも3以上の無線子局ノードと相互通信可能に配置され、受信側伝送経路を除く2以上の発信側伝送経路から任意に情報伝送経路を選択する情報経路選択機能とを備えている。また、固定情報端末5,5…からの情報取得を行い、無線通信ネットワーク1により最終的に無線親局ノード2に情報を伝送する情報伝送機能と、マイクロ波ドップラーセンサ8を備えている。また、中央処理装置(CPU)と中継した情報の記憶装置とを備え、入出力インターフェースを介して、外部に情報を入出力可能とされる。
【0025】
装置構成は、図2に示されるように、固定情報端末5及び移動無線端末4から情報を受け取るための受信モデム3a、変調コンバータ3b、CPU+記憶装置部3c、制御I/F回路3dを介して無線子局3(又は無線親局ノード2)を双方向通信を行うための無線モデム3eと、DC電源3fと、マイクロ波ドップラーセンサ8とを備える。CPU+記憶装置部3cに対する入出力インターフェース9,9を持ち、外部に情報が入出力可能とされる。また、移動無線端末4に対して、自己IDを発信するタイミングを知らせるために、トリガー信号の発信を行うトリガー信号発信器13を備える。
【0026】
前記無線子局ノード3の無線周波数は2.4GHz帯の16chを使用し、規格はIEEE802.15.4とするのが望ましい。この場合の伝送距離は500m以下である。
【0027】
前記自己組織化機能とは、無線子局ノード3,3…を点在配置した上で、電源を投入すると、各無線子局ノード3,3…が自律的に隣接する無線子局ノード3,3…を検出し、自動的にマルチポップネットワークを構築するパーソナルエリアネットワーク構築機能と、新たな無線子局ノード3の追加や削除に対しても、自動的にネットワークへの参加とネットワークからの除外とを自動的に行うネットワークのメンバー変更機能である。
【0028】
前記パーソナルエリアネットワーク構築は、例えば下記の手順により行われる。
【0029】
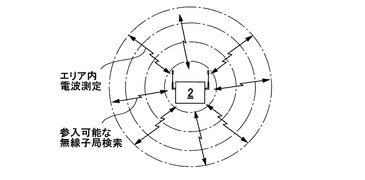
[無線親局ノード2によるネットワーク加入呼び掛けプロセス](図3参照)
(1-1)無線親局ノード2は、無線パーソナルエリアネットワーク構築機能により、電源投入後、利用可能な周波数チャンネルの中から予め指定した複数チャンネルの電波強度を設置した環境下において自動測定する。
(1-2)空き周波数チャンネルと判断できるチャンネルを自動選択して、無線パーソナルエリアネットワークを開始する。
(1-3)無線親局ノード2は周波数チャンネルを決定後、無線パーソナルエリアネットワークを構築し、ネットワークの制御を開始する。
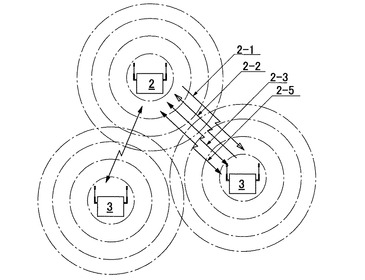
[無線子局ノード3のネットワークへの申請加入プロセス](図4参照)
(2-1)無線パーソナルエリアネットワーク周辺にある無線通信可能な無線子局ノード3は電源投入後、ネットワーク検索機能により、加入の可能な無線パーソナルエリアネットワークを自動的にチャンネルスキャンにより無線子局ノード3周辺の潜在的な無線親局ノード2を検索し、ビーコン要求を行う。
(2-2)無線子局ノード3が無線親局ノード2から送信されたビーコンを受信した場合、無線子局ノード3は無線親局ノード2の無線パーソナルエリアネットワークID、周波数チャンネル、加入受入れ機器能力などの情報を登録する。
(2-3)無線子局ノード3は、目的のチャンネル情報を得て、無線パーソナルエリアネットワークに加入することを接続要求コマンドで無線親局ノード2へ接続を要求する。
(2-4)無線親局ノード2は、無線子局ノード3の加入申請を許可すると、ネットワークアドレスを加入する無線子局ノード3へ発行する。新規加入した無線子局ノード3をネットワークメンバーとして取り扱い登録する。
(2-5)さらに無線親局ノード2は、無線子局ノード3への加入許可メッセージの送信に成功すると、新メンバーの加入を記憶する。
(2-6)無線子局ノード3は加入許可を受けてから、無線親局ノード2との状態を親子関係に変更して、ネットワークへの自動加入プロセスが完了する。
(2-7)無線親局ノード2も無線子局ノード3も既設の自立中継機能を開始し、無線パーソナルエリアネットワークを構成する。
【0030】
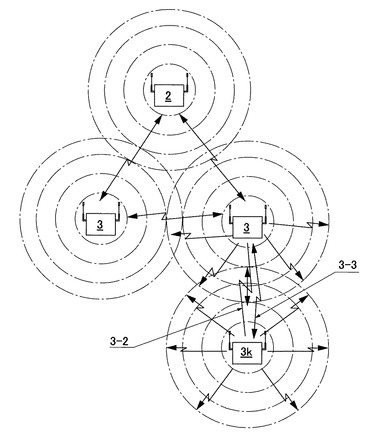
また、前記ネットワークのメンバー変更は、例えば下記手順により行われる(図5参照)。
【0031】
[無線子局ノードの追加によるネットワークへの加入プロセス]
(3-1)無線子局ノード3を無線パーソナルエリアネットワークの無線親局ノード2又は無線パーソナルエリアネットワークに属する無線子局ノード3の少なくとも1台と無線通信が可能とされる場所に新規追加する。追加設置後、電源を投入して新規追加した無線子局ノード3kを立ち上げる。
(3-2)新規追加した無線子局ノード3kは、周辺にある加入可能な無線ネットワークを自律的に検索する。また、無線ネットワーク内の周辺にある既設無線子局ノード3も新規無線子局ノード3kを自律的に検索する。
(3-3)新規追加無線子局ノード3kは、相互検索により無線子局ノード3を発見すると直接または申請加入プロセスに従い、自律中継機能により、周辺にある無線子局ノード3と無線接続しあうことにより無線ネットワークを構成する。
(3-4)無線ネットワーク内のすべての無線子局ノード3は、自律中継機器として機能し、無線子局ノード群3、3…間を飛び交う情報を、各々の無線子局ノード3,3…が共有する。
【0032】
一方、前記情報経路選択機能とは、ある特定の無線子局ノード3に障害が発生したり、電波環境の変化で無線が途切れたりした場合は、迂回路的に伝送経路の変更を行う機能であり、ネットワークの堅牢性を保つことが可能となる。
【0033】
例えば、図6(A)に示されるように、無線子局ノード群A〜Gの中で、無線子局ノードAから太字矢印で示した伝送ルートで無線子局ノードGに情報が伝送されている状態時に、中間の無線子局ノードDに障害が発生した場合は、図6(B)に示されるように、無線子局ノードCは、無線子局ノードEに対して情報を伝送経路を変更し、情報が無線子局ノードGに伝送されるように維持する。
【0034】
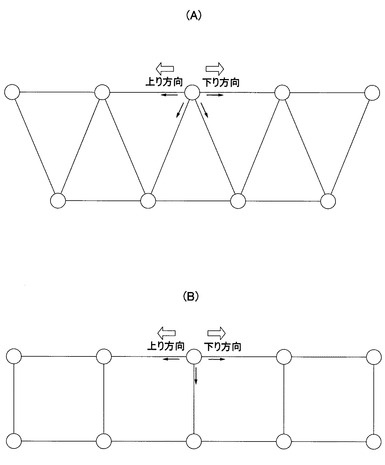
このような情報経路選択機能を有するには、各無線子局ノード3,3…は、隣接する少なくとも3以上の無線子局ノードと相互通信可能に配置され、受信側伝送経路を除く2以上の発信側伝送経路が確保されている必要がある。例えば図7(A)に示される無線リンク図は、各無線子局ノード3をジグザグ状に配置することにより、三角網目状の無線リンクが形成されるようにした例であり、各無線子局ノード3、3…は、上り方向及び下り方向のそれぞれについて、発信側伝送経路として矢印で示された2つの伝送経路を保有する。また、図7(B)は無線子局ノード3,3…を格子配列として四角網目状の無線リンクが形成されるようにした例である。この例では、上り方向及び下り方向のそれぞれについて、発信側伝送経路として矢印で示された2つの伝送経路を保有するが、1つの伝送経路が上り方向と下り方向とで共有されていることになる。
【0035】
前記マイクロ波ドップラーセンサ8は、送信器と受信器とを備え、送信器から移動している対象物体に向けマイクロ波を発射し、反射してきたマイクロ波を受信器により受信し、信号制御部にて伝送波との周波数を比較し、対象物体の移動に比例して受信波の周波数がシフトする現象(ドップラー効果)を検出し、電圧などの信号を出力する検知器であり、移動しているトンネル施工重機の存在を検知することが可能となる。
【0036】
一方、前記無線親局ノード2は、取得した情報の記憶機能と、接続されたモニタ装置及び/又は表示板への情報表示機能と、必要に応じて外部のネットワークインフラ12と接続するゲートウェイ機能とを備えている。装置構成は、図2に示されるように、無線子局ノード3から情報を受け取るための受信モデム2a、変調コンバータ2b、CPU+記憶装置部2c、制御I/F回路2dを介して、例えば広域無線通信ネットワーク、WiMAXブロードバンド、モバイルWiMAXなどの無線インフラ12に対し接続するための無線モデム2eと、DC電源2fとから構成され、前記CPU+記憶装置部2cに対する入出力インターフェース9,9を持ち、外部に情報が入出力可能とされる。
【0037】
前記無線親局ノード2に対しては、前記入出力インターフェース9,9に対して、管理用コンピュータ7や、表示板6などが接続される。
【0038】
また、前記無線親局ノード2が無線インフラ12に対する接続機能(ゲートウェイ機能)を持つことにより、図1に示されるように、遠隔地に設置したネットワーク接続機器11を介して、管理用コンピュータ7や表示板6などに建設現場で取得した情報をリアルタイムで表示することが可能となる。
【0039】
他方、前記固定情報端末5は、入力インターフェースによって各種情報の入力機能を備える。装置構成は、図2に示されるように、センサ用I/F5a、制御I/F回路5b、発信モデム5cと、DC電源5dとから構成され、緊急時の通報釦を備える。前記センサ用I/F5aに対して、坑内及び地山中に設置された各種センサ類からのセンサーケーブルや、トンネルボーリングマシン、自由断面掘削機などの掘削機、モルタル又はコンクリート吹付機、ドリルジャンボ等の施工機械などから送られる各種計測・運転情報などの信号ケーブルなどが接続される。
【0040】
前記移動無線端末4は、無線子局ノード3,3…からのトリガー信号に応じて、自己IDを送信するID情報送信機能を備えている。装置構成は図2に示されるように、制御I/F回路4b、発信モデム4cと、DC電源4dとから構成され、緊急時の通報釦を備える。また、無線子局ノード3からのトリガー信号の受信のために微弱無線端末14を備える。そして、前記無線子局ノード3がマイクロ波ドップラーセンサ8によってトンネル施工重機を検知したならば、その際に無線子局ノード3がトリガー信号を発信し、移動無線端末4は無線子局ノード3からのトリガー信号を受信した時だけ、前記発信モデム4cによって無線子局ノード3に自己IDを送信する。
【0041】
この移動無線端末4のID情報は、トンネル施工重機を検知した無線子局ノード3のID情報とともに、無線通信ネットワーク8を介して、無線親局ノード2に伝送され、IDによってトンネル施工重機の種別が特定されると共に、予め登録されている無線子局ノード3の位置情報からトンネル施工重機の位置が割り出される。
【0042】
トンネル施工重機の位置検出精度を向上させるには、無線子局ノード3、3…の間に所望の位置精度に応じて、無線子局ノード3に対する情報送信機能と、マイクロ波ドップラーセンサ8と、移動無線端末4に対するトリガー信号発信機能、移動無線端末4からのID情報受信機能とを有する補間無線ノードを配置するようにすればよい。
【0043】
ところで、上記形態例では、無線子局ノード3及び移動無線端末4の電池寿命の長期化を図るために、マイクロ波ドップラーセンサによって移動体を検知したならば、その際に無線子局ノード3が移動無線端末4に対してトリガー信号を発信するようにし、移動無線端末4は、無線子局ノード3からのトリガー信号の受信があった時だけ、自己IDを送信するようにしたが、移動無線端末4が連続的又は間欠的に常時、自己IDを送信し、無線子局ノード3がこの信号を受信するようにしてもよい。
【0044】
また、トンネル施工重機の位置検出精度を向上させるには、各無線子局ノード3,3…は移動無線端末4からの無線信号の電界強度測定機能を有し、前記管理コンピュータ7において、電界強度が距離に反比例することを用いて、少なくとも3点での電界強度測定値に基づき、各トンネル施工重機の位置を検出するようにしてもよい。
【0045】
〔トンネル施工におけるサイクルタイム測定方法〕
トンネル施工のサイクルタイムを精度良く自動的に取得するために、本発明では、トンネル切羽前に設置された無線ノード3が受信する前記移動無線端末4、4…の自己ID情報から切羽前に位置しているトンネル施工重機の種別が検出されるようにし、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得するようにする。
【0046】
以下、更に具体的に詳述する。
【0047】
トンネル内には、削孔、装薬、支保工建込み、ロックボルト打設作業を行うためのホイールジャンボ、火薬運搬車、ズリ出しのためのホイールローダ、ずり運搬ダンプ、当たり取りのためのブレーカー、バックホウ、鋼製支保工建込みのためのエレクター、吹付け作業のための吹付けロボット、ミキサー車、ロックボルト打設作業のためのモルタル台車等、各種のトンネル施工重機が配置されている。そして、工事種別に応じて、切羽前まで特定のトンネル施工重機が移動し、作業を行うこととなる。
【0048】
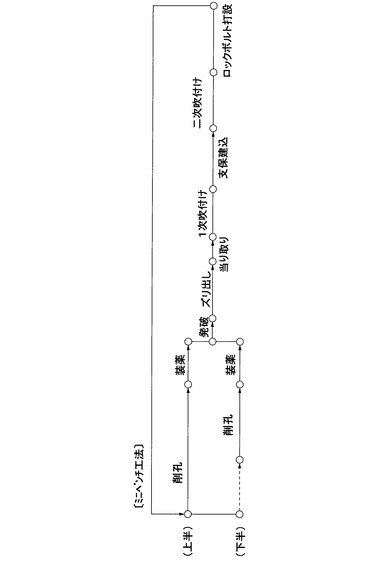
図9に示されるトンネル施工の掘削手順は、上半及び下半の一括の併行作業により掘削を行うミニベンチ工法の例であり、上半ベンチ長を3〜5.5mと極端に短くした上で、上半及び下半のそれぞれにおいてロックボルト削孔および装薬孔・装薬を併行して行った後、上半および下半を一気に切り崩し(発破)、その後ズリ出し→当り取り→一次吹付け→支保建込み→二次吹付け→ロックボルト打設の手順で作業を行うトンネル工法の例である。
【0049】
このトンネル工法の例では、下表1に示すように、各作業に応じて切羽前には特定のトンネル施工重機が位置することとなる。
【表1】

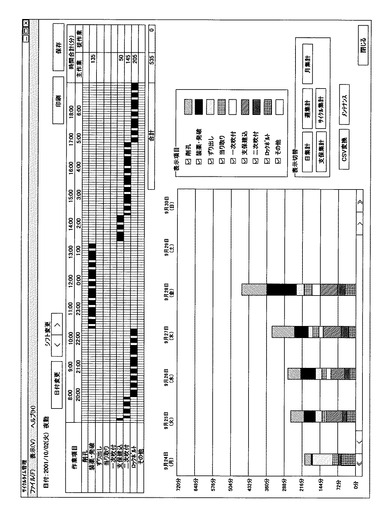
従って、切羽前に設置してある無線子局ノード3がトンネル切羽前に位置するトンネル施工重機から受信したID情報から重機種別及び配置パターンを判別することにより工事種別を特定することができ、この工事種別の切替えタイミングの時刻を計測することによりサイクルタイムを自動的に取得することが可能となる。図8は、このようにして自動的に取得したサイクルタイムを管理用コンピュータ7のモニタ画面に特定の形式で表示させたものである。各作業項目の種別及び時刻データは、1サイクルの工程が終了した時点で集計されるとともに、日毎、週毎および月毎に平均サイクルタイムが集計される。図中では他に、支保建込み集計および総サイクルタイム集計の表示が可能になっているとともに、上段には作業項目毎の時間表示が成されるようになっている。
【0050】
一方、トンネル坑内では、図15に示されるように、切羽の後方に、測距及び測角の基本機能の他、レーザー照射、自動視準機能、視準の追尾機能、自動整準補正機能を備えるトータルステーション20が配置され、各種の測量及びマーキングが行われるようになっている。
【0051】
この測量作業は、前記トンネル作業種別と密接に関係しており、トンネル作業種別に応じて各測量が行われる。従って、図示されるように、無線子局ノード3からサイクル工程の情報を取得したならば、コントローラ21によって、トータルステーション20の作業モードを自動的に変更する。その具体例として、各サイクル工程の作業種別毎の測量項目を下表2に列記する。
【表2】
【0052】
〔他の形態例〕
(1)前記表示板6を坑口及び/又は坑内に設置し、現在行われているサイクル工程作業を表示するようにすれば、作業員等が迅速に作業状況を把握することが可能となる。
【符号の説明】
【0053】
1…無線通信ネットワーク、2…無線親局ノード、3…無線子局ノード、4…移動無線端末、5…固定情報端末、6…表示板、7…管理用コンピュータ、9…入出力インターフェース
【技術分野】
【0001】
本発明は、サイクルタイム測定を精度良く自動的に行うようにしたトンネル施工におけるサイクルタイム測定方法に関する。
【背景技術】
【0002】
従来より、山岳トンネルの施工では、掘削方法の違いにより全断面掘削工法、上部半断面先進工法、ロングベンチカット工法、ショートベンチカット工法、ミニベンチカット工法等のベンチカット工法などが存在するが、トンネル掘削手順は、概ね穿孔、装薬、発破、ズリ出し、一次吹付け、支保工建込み、二次吹付け、ロックボルト打設の工程を順にかつ段階的に踏むことにより掘削が行われている。なお、支保工建込み、吹付けおよびロックボルト打設は、地山状況、トンネル施工方法および掘削方法等の違いによって省略されたり、順序が入れ替わることがある。
【0003】
上記トンネル施工では、工程管理の一環として、掘削サイクルタイムを測定している。この掘削サイクルタイムの測定は、専ら坑夫または現場職員等(以下、纏めて坑内作業員等という。)による記帳により成されていた。
【0004】
しかしながら、上記坑内作業員等の記帳による測定の場合には、トンネル切羽付近に一日中張り付いて施工を監視する必要があり、かつ1日の施工完了後にデータの整理に多くの時間と手間が掛かるなどの問題があった。また、職員は多忙の中、データ整理に終始せざるを得ないなど人員的にも非効率であった。さらに、毎日単調な作業の繰り返しになるため、記帳忘れ等により一部のデータに信頼性が欠けることがあり、データの整合性を取るために一部に手直しが必要となることも多々あった。
【0005】
他方、前記サイクルタイムは、本来、トンネル施工の経営分析にも直接的に関連性があり、工事費に及ぼす影響が大きい因子であるが、従来のように坑内作業員等が手作業により行っていたのでは、実際のフィードバックまで時間が掛かり過ぎるなどの問題があった。
【0006】
そこで近年は、トンネル施工におけるサイクルタイムを自動的に測定することが提案されている。例えば、下記特許文献1では、現場事務所内に工程管理用コンピュータを設備するとともに、トンネルの切羽近傍に集音マイクを配設し、前記工程管理用コンピュータには予めトンネル施工のために配置される施工重機毎にその発生音の解析データとともに、その音特性と重機種別とが関連付けられており、前記集音マイクによって捕集された音声の音声解析に基づいて重機種別を特定することにより、特定の作業が開始及び/又は終了したことを自動的に検出し、前記工程管理用コンピュータにおいて任意の形式でサイクルタイムが表示されるようにしたトンネル施工におけるサイクルタイム測定方法(従来法1)及び現場事務所内に工程管理用コンピュータを設備するとともに、トンネル施工のために配置される施工重機に稼働状況を検出するセンサーを取付け、前記施工重機の稼働状況から特定の作業が開始及び/又は終了したことを自動的に検出し、前記工程管理用コンピュータにおいて任意の形式でサイクルタイムが表示されるようにしたトンネル施工におけるサイクルタイム測定方法(従来法2)が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−138874号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、前記従来法1の集音マイクによって捕集された音声の音声解析に基づいて重機種別を特定する方法の場合は、解析結果の誤差が生じ易く重機種別の特定が困難であることがあるとともに、他の作業が輻輳する場合、重機発生音以外の音が多く捕集されると重機特定精度が低下するといった問題があった。
【0009】
また、前記従来法2は、具体的にはホイールジャンボに搭載された削孔装置の電動モータに電流・電圧センサーを取り付けたり、油圧機器などに圧力センサーを取付け、当該センサーによる検出によって施工重機に稼働状況から特定作業が開始及び/又は終了を検知するようにするものであるが、この場合も重機の稼働状況のみの判別では重機種別の特定が困難であったり、重機特定精度が低下するといった問題があった。
【0010】
そこで本発明の主たる課題は、サイクルタイム測定を精度良くかつ自動的に取得し得るようにすることにある。
【課題を解決するための手段】
【0011】
前記課題を解決するために請求項1に係る本発明として、トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群によって無線通信ネットワークが構築され、前記無線ノードと通信可能とされる管理用コンピュータが設置されるとともに、前記無線ノード群の交信ゾーン内において無線ノードと相互に無線通信可能とされる移動無線端末が各トンネル施工重機に備えられ、
前記移動無線端末は無線ノードに対して自己IDを送信するID情報送信機能を備えるとともに、前記管理用コンピュータによって、予め登録されている無線ノードの位置情報及び前記移動無線端末のID情報から切羽前に位置しているトンネル施工重機の種別を検出し、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得することを特徴とするトンネル施工におけるサイクルタイム測定方法が提供される。
【0012】
上記請求項1記載の発明では、トンネル坑内に構築された無線通信ネートワークとともに、無線ノード群の交信ゾーン内において無線ノードと相互に無線通信可能とされる移動無線端末が各トンネル施工重機に備えられる。前記移動無線端末は無線ノードに対して自己IDを送信するID情報送信機能を備え、前記管理用コンピュータによって、予め登録されている無線ノードの位置情報及び前記移動無線端末のID情報から切羽前に位置しているトンネル施工重機の種別を検出するようにする。
【0013】
一方、トンネル内には、削孔、装薬、支保工建込み、ロックボルト打設作業を行うためのホイールジャンボ、火薬運搬車、ズリ出しのためのホイールローダ、ずり運搬ダンプ、当たり取りのためのブレーカー、バックホウ、鋼製支保工建込みのためのエレクター、吹付け作業のための吹付けロボット、ミキサー車、ロックボルト打設作業のためのモルタル台車等、各種のトンネル施工重機が配置され、サイクル工程の工事種別に応じて、切羽前まで特定のトンネル施工重機が移動し、作業を行うこととなるため、トンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定すれば、サイクルタイムを自動的に取得することが可能となる。この方法の場合、切羽前に位置しているトンネル施工重機の種別については高い精度で判別することができるため、サイクルタイム測定を精度良く行うことが可能となる。
【0014】
請求項2に係る本発明として、前記トンネル切羽前に設置された無線ノードが受信する移動無線端末の自己ID情報から切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を取得するようにしてある請求項1記載のトンネル施工におけるサイクルタイム測定方法が提供される。
【0015】
上記請求項2記載の発明は、トンネル切羽前に設置された無線ノードが受信する移動無線端末の自己ID情報から切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を取得するものである。トンネル切羽前に位置するトンネル施工重機の種別及び配置パターンを検出する方法としては、トンネル坑内において移動するトンネル施工重機の位置を常時把握するようにした上で、切羽前に存在するトンネル施工重機を特定することも可能であるが、本請求項2に係る発明では、トンネル切羽前に存在しているトンネル施工重機のみが特定されれば良いため、トンネル切羽前に設置された無線ノードがどのID情報を受信するかで切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を簡易に取得するようにしたものである。
【0016】
請求項3に係る本発明として、前記工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更するようにしてある請求項1〜2いずれかに記載のトンネル施工におけるサイクルタイム測定方法が提供される。
【0017】
上記請求項3記載の発明は、前記工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更するようにしたものである。トンネル坑内での測量作業は、前記トンネル作業種別と密接に関係しており、トンネル作業種別に応じて各測量が行われるようになっているため、自動取得された工事種別の特定情報に基づいて、トータルステーションの作業モードを自動的に変更するようにすれば、測量作業の自動化に資するようになる。
【発明の効果】
【0018】
以上詳説のとおり本発明によれば、サイクルタイム測定を精度良く自動的に行えるようになる。また、工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更することで、トータルステーションによる測量作業の自動化にも資するようになる。
【図面の簡単な説明】
【0019】
【図1】本発明に係る無線通信ネットワーク1の概念図である。
【図2】そのシステム系統図である。
【図3】パーソナルエリアネットワークの構築手順(その1)の説明図である。
【図4】パーソナルエリアネットワークの構築手順(その2)の説明図である。
【図5】追加無線子局ノードのネットワークへの加入手順の説明図である。
【図6】(A)(B)は情報経路選択機能の説明図である。
【図7】(A)(B)は無線子局ノード3の配置要領図である。
【図8】管理用コンピュータ7のモニタ画面上でのサイクルタイム表示例を示す図である。
【図9】トンネル掘削のサイクル工程図である。
【図10】削孔作業状況図である。
【図11】装薬作業状況図である。
【図12】ズリ出し作業状況図である。
【図13】当り取り作業状況図である。
【図14】吹付け作業状況図である。
【図15】トータルステーション20による測量作業状況図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施の形態について図面を参照しながら詳述する。
【0021】
〔トンネル内の無線通信ネットワーク1の構築〕
無線通信ネットワーク1は、具体的には図1に示されるように、トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群2、3…によって無線通信ネットワークが構築され、前記無線ノード2と通信可能とされる管理用コンピュータ7が設置されるとともに、前記無線ノード群の交信ゾーン内において無線ノード2,3…と相互に無線通信可能とされる移動無線端末4,4…が移動する各トンネル施工重機に備えられたものである。
【0022】
ここで、前記無線ノード群2,3…は、各無線ノード群の上位に位置し、統括的に管理・調整するコーディネート機能を備える少なくとも1つの無線ノード(以下、無線親局ノード2という。)と、それ以外の無線ノード(以下、無線子局ノード3という。)とから構成されている。
【0023】
以下、さらに具体的に詳述する。
【0024】
前記無線子局ノード3は、自律的に隣接する無線子局ノード3を検出し、無線通信可能なネットワークを構築する自己組織化機能と、隣接する少なくとも3以上の無線子局ノードと相互通信可能に配置され、受信側伝送経路を除く2以上の発信側伝送経路から任意に情報伝送経路を選択する情報経路選択機能とを備えている。また、固定情報端末5,5…からの情報取得を行い、無線通信ネットワーク1により最終的に無線親局ノード2に情報を伝送する情報伝送機能と、マイクロ波ドップラーセンサ8を備えている。また、中央処理装置(CPU)と中継した情報の記憶装置とを備え、入出力インターフェースを介して、外部に情報を入出力可能とされる。
【0025】
装置構成は、図2に示されるように、固定情報端末5及び移動無線端末4から情報を受け取るための受信モデム3a、変調コンバータ3b、CPU+記憶装置部3c、制御I/F回路3dを介して無線子局3(又は無線親局ノード2)を双方向通信を行うための無線モデム3eと、DC電源3fと、マイクロ波ドップラーセンサ8とを備える。CPU+記憶装置部3cに対する入出力インターフェース9,9を持ち、外部に情報が入出力可能とされる。また、移動無線端末4に対して、自己IDを発信するタイミングを知らせるために、トリガー信号の発信を行うトリガー信号発信器13を備える。
【0026】
前記無線子局ノード3の無線周波数は2.4GHz帯の16chを使用し、規格はIEEE802.15.4とするのが望ましい。この場合の伝送距離は500m以下である。
【0027】
前記自己組織化機能とは、無線子局ノード3,3…を点在配置した上で、電源を投入すると、各無線子局ノード3,3…が自律的に隣接する無線子局ノード3,3…を検出し、自動的にマルチポップネットワークを構築するパーソナルエリアネットワーク構築機能と、新たな無線子局ノード3の追加や削除に対しても、自動的にネットワークへの参加とネットワークからの除外とを自動的に行うネットワークのメンバー変更機能である。
【0028】
前記パーソナルエリアネットワーク構築は、例えば下記の手順により行われる。
【0029】
[無線親局ノード2によるネットワーク加入呼び掛けプロセス](図3参照)
(1-1)無線親局ノード2は、無線パーソナルエリアネットワーク構築機能により、電源投入後、利用可能な周波数チャンネルの中から予め指定した複数チャンネルの電波強度を設置した環境下において自動測定する。
(1-2)空き周波数チャンネルと判断できるチャンネルを自動選択して、無線パーソナルエリアネットワークを開始する。
(1-3)無線親局ノード2は周波数チャンネルを決定後、無線パーソナルエリアネットワークを構築し、ネットワークの制御を開始する。
[無線子局ノード3のネットワークへの申請加入プロセス](図4参照)
(2-1)無線パーソナルエリアネットワーク周辺にある無線通信可能な無線子局ノード3は電源投入後、ネットワーク検索機能により、加入の可能な無線パーソナルエリアネットワークを自動的にチャンネルスキャンにより無線子局ノード3周辺の潜在的な無線親局ノード2を検索し、ビーコン要求を行う。
(2-2)無線子局ノード3が無線親局ノード2から送信されたビーコンを受信した場合、無線子局ノード3は無線親局ノード2の無線パーソナルエリアネットワークID、周波数チャンネル、加入受入れ機器能力などの情報を登録する。
(2-3)無線子局ノード3は、目的のチャンネル情報を得て、無線パーソナルエリアネットワークに加入することを接続要求コマンドで無線親局ノード2へ接続を要求する。
(2-4)無線親局ノード2は、無線子局ノード3の加入申請を許可すると、ネットワークアドレスを加入する無線子局ノード3へ発行する。新規加入した無線子局ノード3をネットワークメンバーとして取り扱い登録する。
(2-5)さらに無線親局ノード2は、無線子局ノード3への加入許可メッセージの送信に成功すると、新メンバーの加入を記憶する。
(2-6)無線子局ノード3は加入許可を受けてから、無線親局ノード2との状態を親子関係に変更して、ネットワークへの自動加入プロセスが完了する。
(2-7)無線親局ノード2も無線子局ノード3も既設の自立中継機能を開始し、無線パーソナルエリアネットワークを構成する。
【0030】
また、前記ネットワークのメンバー変更は、例えば下記手順により行われる(図5参照)。
【0031】
[無線子局ノードの追加によるネットワークへの加入プロセス]
(3-1)無線子局ノード3を無線パーソナルエリアネットワークの無線親局ノード2又は無線パーソナルエリアネットワークに属する無線子局ノード3の少なくとも1台と無線通信が可能とされる場所に新規追加する。追加設置後、電源を投入して新規追加した無線子局ノード3kを立ち上げる。
(3-2)新規追加した無線子局ノード3kは、周辺にある加入可能な無線ネットワークを自律的に検索する。また、無線ネットワーク内の周辺にある既設無線子局ノード3も新規無線子局ノード3kを自律的に検索する。
(3-3)新規追加無線子局ノード3kは、相互検索により無線子局ノード3を発見すると直接または申請加入プロセスに従い、自律中継機能により、周辺にある無線子局ノード3と無線接続しあうことにより無線ネットワークを構成する。
(3-4)無線ネットワーク内のすべての無線子局ノード3は、自律中継機器として機能し、無線子局ノード群3、3…間を飛び交う情報を、各々の無線子局ノード3,3…が共有する。
【0032】
一方、前記情報経路選択機能とは、ある特定の無線子局ノード3に障害が発生したり、電波環境の変化で無線が途切れたりした場合は、迂回路的に伝送経路の変更を行う機能であり、ネットワークの堅牢性を保つことが可能となる。
【0033】
例えば、図6(A)に示されるように、無線子局ノード群A〜Gの中で、無線子局ノードAから太字矢印で示した伝送ルートで無線子局ノードGに情報が伝送されている状態時に、中間の無線子局ノードDに障害が発生した場合は、図6(B)に示されるように、無線子局ノードCは、無線子局ノードEに対して情報を伝送経路を変更し、情報が無線子局ノードGに伝送されるように維持する。
【0034】
このような情報経路選択機能を有するには、各無線子局ノード3,3…は、隣接する少なくとも3以上の無線子局ノードと相互通信可能に配置され、受信側伝送経路を除く2以上の発信側伝送経路が確保されている必要がある。例えば図7(A)に示される無線リンク図は、各無線子局ノード3をジグザグ状に配置することにより、三角網目状の無線リンクが形成されるようにした例であり、各無線子局ノード3、3…は、上り方向及び下り方向のそれぞれについて、発信側伝送経路として矢印で示された2つの伝送経路を保有する。また、図7(B)は無線子局ノード3,3…を格子配列として四角網目状の無線リンクが形成されるようにした例である。この例では、上り方向及び下り方向のそれぞれについて、発信側伝送経路として矢印で示された2つの伝送経路を保有するが、1つの伝送経路が上り方向と下り方向とで共有されていることになる。
【0035】
前記マイクロ波ドップラーセンサ8は、送信器と受信器とを備え、送信器から移動している対象物体に向けマイクロ波を発射し、反射してきたマイクロ波を受信器により受信し、信号制御部にて伝送波との周波数を比較し、対象物体の移動に比例して受信波の周波数がシフトする現象(ドップラー効果)を検出し、電圧などの信号を出力する検知器であり、移動しているトンネル施工重機の存在を検知することが可能となる。
【0036】
一方、前記無線親局ノード2は、取得した情報の記憶機能と、接続されたモニタ装置及び/又は表示板への情報表示機能と、必要に応じて外部のネットワークインフラ12と接続するゲートウェイ機能とを備えている。装置構成は、図2に示されるように、無線子局ノード3から情報を受け取るための受信モデム2a、変調コンバータ2b、CPU+記憶装置部2c、制御I/F回路2dを介して、例えば広域無線通信ネットワーク、WiMAXブロードバンド、モバイルWiMAXなどの無線インフラ12に対し接続するための無線モデム2eと、DC電源2fとから構成され、前記CPU+記憶装置部2cに対する入出力インターフェース9,9を持ち、外部に情報が入出力可能とされる。
【0037】
前記無線親局ノード2に対しては、前記入出力インターフェース9,9に対して、管理用コンピュータ7や、表示板6などが接続される。
【0038】
また、前記無線親局ノード2が無線インフラ12に対する接続機能(ゲートウェイ機能)を持つことにより、図1に示されるように、遠隔地に設置したネットワーク接続機器11を介して、管理用コンピュータ7や表示板6などに建設現場で取得した情報をリアルタイムで表示することが可能となる。
【0039】
他方、前記固定情報端末5は、入力インターフェースによって各種情報の入力機能を備える。装置構成は、図2に示されるように、センサ用I/F5a、制御I/F回路5b、発信モデム5cと、DC電源5dとから構成され、緊急時の通報釦を備える。前記センサ用I/F5aに対して、坑内及び地山中に設置された各種センサ類からのセンサーケーブルや、トンネルボーリングマシン、自由断面掘削機などの掘削機、モルタル又はコンクリート吹付機、ドリルジャンボ等の施工機械などから送られる各種計測・運転情報などの信号ケーブルなどが接続される。
【0040】
前記移動無線端末4は、無線子局ノード3,3…からのトリガー信号に応じて、自己IDを送信するID情報送信機能を備えている。装置構成は図2に示されるように、制御I/F回路4b、発信モデム4cと、DC電源4dとから構成され、緊急時の通報釦を備える。また、無線子局ノード3からのトリガー信号の受信のために微弱無線端末14を備える。そして、前記無線子局ノード3がマイクロ波ドップラーセンサ8によってトンネル施工重機を検知したならば、その際に無線子局ノード3がトリガー信号を発信し、移動無線端末4は無線子局ノード3からのトリガー信号を受信した時だけ、前記発信モデム4cによって無線子局ノード3に自己IDを送信する。
【0041】
この移動無線端末4のID情報は、トンネル施工重機を検知した無線子局ノード3のID情報とともに、無線通信ネットワーク8を介して、無線親局ノード2に伝送され、IDによってトンネル施工重機の種別が特定されると共に、予め登録されている無線子局ノード3の位置情報からトンネル施工重機の位置が割り出される。
【0042】
トンネル施工重機の位置検出精度を向上させるには、無線子局ノード3、3…の間に所望の位置精度に応じて、無線子局ノード3に対する情報送信機能と、マイクロ波ドップラーセンサ8と、移動無線端末4に対するトリガー信号発信機能、移動無線端末4からのID情報受信機能とを有する補間無線ノードを配置するようにすればよい。
【0043】
ところで、上記形態例では、無線子局ノード3及び移動無線端末4の電池寿命の長期化を図るために、マイクロ波ドップラーセンサによって移動体を検知したならば、その際に無線子局ノード3が移動無線端末4に対してトリガー信号を発信するようにし、移動無線端末4は、無線子局ノード3からのトリガー信号の受信があった時だけ、自己IDを送信するようにしたが、移動無線端末4が連続的又は間欠的に常時、自己IDを送信し、無線子局ノード3がこの信号を受信するようにしてもよい。
【0044】
また、トンネル施工重機の位置検出精度を向上させるには、各無線子局ノード3,3…は移動無線端末4からの無線信号の電界強度測定機能を有し、前記管理コンピュータ7において、電界強度が距離に反比例することを用いて、少なくとも3点での電界強度測定値に基づき、各トンネル施工重機の位置を検出するようにしてもよい。
【0045】
〔トンネル施工におけるサイクルタイム測定方法〕
トンネル施工のサイクルタイムを精度良く自動的に取得するために、本発明では、トンネル切羽前に設置された無線ノード3が受信する前記移動無線端末4、4…の自己ID情報から切羽前に位置しているトンネル施工重機の種別が検出されるようにし、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得するようにする。
【0046】
以下、更に具体的に詳述する。
【0047】
トンネル内には、削孔、装薬、支保工建込み、ロックボルト打設作業を行うためのホイールジャンボ、火薬運搬車、ズリ出しのためのホイールローダ、ずり運搬ダンプ、当たり取りのためのブレーカー、バックホウ、鋼製支保工建込みのためのエレクター、吹付け作業のための吹付けロボット、ミキサー車、ロックボルト打設作業のためのモルタル台車等、各種のトンネル施工重機が配置されている。そして、工事種別に応じて、切羽前まで特定のトンネル施工重機が移動し、作業を行うこととなる。
【0048】
図9に示されるトンネル施工の掘削手順は、上半及び下半の一括の併行作業により掘削を行うミニベンチ工法の例であり、上半ベンチ長を3〜5.5mと極端に短くした上で、上半及び下半のそれぞれにおいてロックボルト削孔および装薬孔・装薬を併行して行った後、上半および下半を一気に切り崩し(発破)、その後ズリ出し→当り取り→一次吹付け→支保建込み→二次吹付け→ロックボルト打設の手順で作業を行うトンネル工法の例である。
【0049】
このトンネル工法の例では、下表1に示すように、各作業に応じて切羽前には特定のトンネル施工重機が位置することとなる。
【表1】
従って、切羽前に設置してある無線子局ノード3がトンネル切羽前に位置するトンネル施工重機から受信したID情報から重機種別及び配置パターンを判別することにより工事種別を特定することができ、この工事種別の切替えタイミングの時刻を計測することによりサイクルタイムを自動的に取得することが可能となる。図8は、このようにして自動的に取得したサイクルタイムを管理用コンピュータ7のモニタ画面に特定の形式で表示させたものである。各作業項目の種別及び時刻データは、1サイクルの工程が終了した時点で集計されるとともに、日毎、週毎および月毎に平均サイクルタイムが集計される。図中では他に、支保建込み集計および総サイクルタイム集計の表示が可能になっているとともに、上段には作業項目毎の時間表示が成されるようになっている。
【0050】
一方、トンネル坑内では、図15に示されるように、切羽の後方に、測距及び測角の基本機能の他、レーザー照射、自動視準機能、視準の追尾機能、自動整準補正機能を備えるトータルステーション20が配置され、各種の測量及びマーキングが行われるようになっている。
【0051】
この測量作業は、前記トンネル作業種別と密接に関係しており、トンネル作業種別に応じて各測量が行われる。従って、図示されるように、無線子局ノード3からサイクル工程の情報を取得したならば、コントローラ21によって、トータルステーション20の作業モードを自動的に変更する。その具体例として、各サイクル工程の作業種別毎の測量項目を下表2に列記する。
【表2】
【0052】
〔他の形態例〕
(1)前記表示板6を坑口及び/又は坑内に設置し、現在行われているサイクル工程作業を表示するようにすれば、作業員等が迅速に作業状況を把握することが可能となる。
【符号の説明】
【0053】
1…無線通信ネットワーク、2…無線親局ノード、3…無線子局ノード、4…移動無線端末、5…固定情報端末、6…表示板、7…管理用コンピュータ、9…入出力インターフェース
【特許請求の範囲】
【請求項1】
トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群によって無線通信ネットワークが構築され、前記無線ノードと通信可能とされる管理用コンピュータが設置されるとともに、前記無線ノード群の交信ゾーン内において無線ノードと相互に無線通信可能とされる移動無線端末が各トンネル施工重機に備えられ、
前記移動無線端末は無線ノードに対して自己IDを送信するID情報送信機能を備えるとともに、前記管理用コンピュータによって、予め登録されている無線ノードの位置情報及び前記移動無線端末のID情報から切羽前に位置しているトンネル施工重機の種別を検出し、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得することを特徴とするトンネル施工におけるサイクルタイム測定方法。
【請求項2】
前記トンネル切羽前に設置された無線ノードが受信する移動無線端末の自己ID情報から切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を取得するようにしてある請求項1記載のトンネル施工におけるサイクルタイム測定方法。
【請求項3】
前記工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更するようにしてある請求項1〜2いずれかに記載のトンネル施工におけるサイクルタイム測定方法。
【請求項1】
トンネル内に点在配置され、無線によって電波通信可能距離内である条件の下で相互に通信が可能とされる多数の無線ノード群によって無線通信ネットワークが構築され、前記無線ノードと通信可能とされる管理用コンピュータが設置されるとともに、前記無線ノード群の交信ゾーン内において無線ノードと相互に無線通信可能とされる移動無線端末が各トンネル施工重機に備えられ、
前記移動無線端末は無線ノードに対して自己IDを送信するID情報送信機能を備えるとともに、前記管理用コンピュータによって、予め登録されている無線ノードの位置情報及び前記移動無線端末のID情報から切羽前に位置しているトンネル施工重機の種別を検出し、このトンネル切羽前に位置するトンネル施工重機の種別及び配置パターンから工事種別を特定することによりサイクルタイムを自動的に取得することを特徴とするトンネル施工におけるサイクルタイム測定方法。
【請求項2】
前記トンネル切羽前に設置された無線ノードが受信する移動無線端末の自己ID情報から切羽前に位置しているトンネル施工重機の種別及び配置パターンの情報を取得するようにしてある請求項1記載のトンネル施工におけるサイクルタイム測定方法。
【請求項3】
前記工事種別の特定情報に基づいて、各種測量作業のためにトンネル坑内に設置されているトータルステーションの作業モードを自動的に変更するようにしてある請求項1〜2いずれかに記載のトンネル施工におけるサイクルタイム測定方法。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−196315(P2010−196315A)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2009−40883(P2009−40883)
【出願日】平成21年2月24日(2009.2.24)
【出願人】(591284601)株式会社演算工房 (22)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成21年2月24日(2009.2.24)
【出願人】(591284601)株式会社演算工房 (22)
[ Back to top ]